图1 多逆变器并网系统拓扑结构
Fig.1 Topological structure of multi-inverter grid-connected system
摘要 在多逆变器并网系统中,逆变器与电网之间的动态交互作用严重威胁系统的稳定性,该系统还同时面临由逆变器间线路阻抗差异导致的功率分配不均以及潜在的电压跌落等电能质量问题。由于现有控制方法难以实现各控制器间的兼容,往往仅能解决上述部分问题,且对所引入控制器之间的交互作用缺乏研究。为此,该文提出一种基于有源阻尼控制的电能质量提升策略,以便同时解决上述问题:通过阻尼器K增强系统阻尼特性,利用虚拟阻抗Zv(s)实现功率解耦与输出阻抗提升,确保功率精确分配;同时采用改进的自适应电压补偿下垂控制,实现并网点电压恢复。该文重点研究了各有源阻尼器间的交互作用及其对振荡抑制的提升效果,结果表明各有源控制器之间不仅具备良好的兼容性,阻尼器K和虚拟阻抗Zv(s)之间还具有协同促进效果:二者可分别抑制中低频和高频段的动态交互作用,通过二者的协同配合可在全频段内规避发生动态交互作用的风险,从而显著提升系统的稳定性。最后通过实验验证所提策略的有效性。
关键词:多逆变器并网系统 动态交互作用 功率均分 电压跌落 有源控制
随着传统化石能源的日益匮乏,在“碳达峰、碳中和”战略目标的推动下,高比例新能源并网系统得到大力发展[1-3]。并网逆变器作为分布式电源与电网之间的重要接口,其在高比例新能源并网系统中的渗透率越来越高,对系统的安全稳定运行有着不容忽视的影响[4-6]。随着新能源大规模的接入,多逆变器并联共同为电网提供电能的运行方式普遍存在,多逆变器并网系统存在着以下三个主要问题:
(1)随着新能源装机容量的不断增大,电网呈现出弱电网特性,且因为并网逆变器控制的非线性特性,导致逆变器与电网之间存在着动态交互作用,严重威胁系统的稳定性[7-8]。
(2)由于逆变器总输出阻抗呈现阻感性,使得逆变器输出的有功功率和无功功率之间相互耦合;并且并联逆变器之间存在线路阻抗差异,导致各逆变器之间难以实现功率均分,降低系统的运行性能[9-10]。
(3)在线路阻抗以及引入控制环节作用下,极易导致并网点电压跌落,难以满足电压要求[11]。
针对逆变器振荡失稳等问题,最有效的方法是增加系统阻尼。增加系统阻尼可以通过引入无源阻尼和有源阻尼两种方式,相比于无源阻尼,有源阻尼因其不会带来功率损耗,成为主流选择[12-14]。文献[15]构造了一种基于多谐振分量的电网电压加权前馈的方法,提高了系统稳定性和对注入电网电流谐波的抑制作用。文献[16]提出一种基于并网电流谐波微分的有源阻尼策略,兼顾弱电网下并网变流器系统稳定控制和高质量并网电流两方面需要。文献[17]提出了一种一阶自抗扰与有源阻尼器相结合的方法,从而实现抑制振荡。文献[18-19]分别提出基于相位超前补偿和陷波器滞后补偿的有源阻尼控制方法,提高系统的鲁棒性。文献[20]则针对锁相环引入负电阻造成的振荡失稳问题,提出一种阻抗-高通滤波器型有源阻尼控制策略。以上的改进有源阻尼器方法对并网系统具有较好的振荡抑制效果,也不会产生额外的功率损耗。但存在方法较为复杂,对并网逆变器控制回路的要求较高,且当引入滤波器时,还需要综合考虑系统谐振频率以及检查灵敏度等问题。
下垂控制是目前用以实现并联逆变器功率均分最普遍的方法[21]。然而,如文献[22]所述,传统的下垂控制在电能质量等问题上存在着局限性。为了克服传统下垂控制的缺点,根据下垂控制的特性提出了多种改进方法。文献[23]提出一种基于电压补偿的下垂控制功率解耦策略,减小功率耦合引起的负阻尼及稳态无功偏差。文献[24]提出一种基于时序分阶段控制的改进下垂控制策略,以实现功率精确均分。文献[25]提出了最优角度压降控制方法,该方法利用相位增强功率共享,由于虚拟阻抗能重塑逆变器阻抗特性,通过调节虚拟阻抗值即可实现有功功率和无功功率之间的解耦。虚拟阻抗成为了更有效的下垂控制改进方法[26-29],但虚拟阻抗所引起的电压质量问题和电压跌落问题往往容易被忽略。文献[27]忽略了虚拟阻抗的引入使电压波形发生畸变的问题。文献[28]忽略了虚拟阻抗造成的电压跌落问题。
综上分析,现有的控制策略存在着以下问题:
(1)无法兼容各个控制器的控制效果来同时解决动态交互作用、功率不均分和电压跌落问题。
(2)对在多逆变器并联并网系统中所引入的有源阻尼器之间的交互作用缺乏研究。
为此,本文提出基于有源阻尼控制的电能质量提升策略,主要工作和贡献总结如下:
(1)所引入的各有源阻尼器相互兼容、相互配合,可以同时实现动态交互作用抑制、功率精确均分以及电压恢复。并建立了施加所提策略后的dq小信号阻抗模型,为理论分析提供模型依据。
(2)重点研究了阻尼器K和虚拟阻抗Zv(s)在抑制动态交互作用问题上的协同促进效果:二者可分别抑制中低频和高频段的动态交互作用,通过协同配合可规避在全频段内发生动态交互作用的风险。
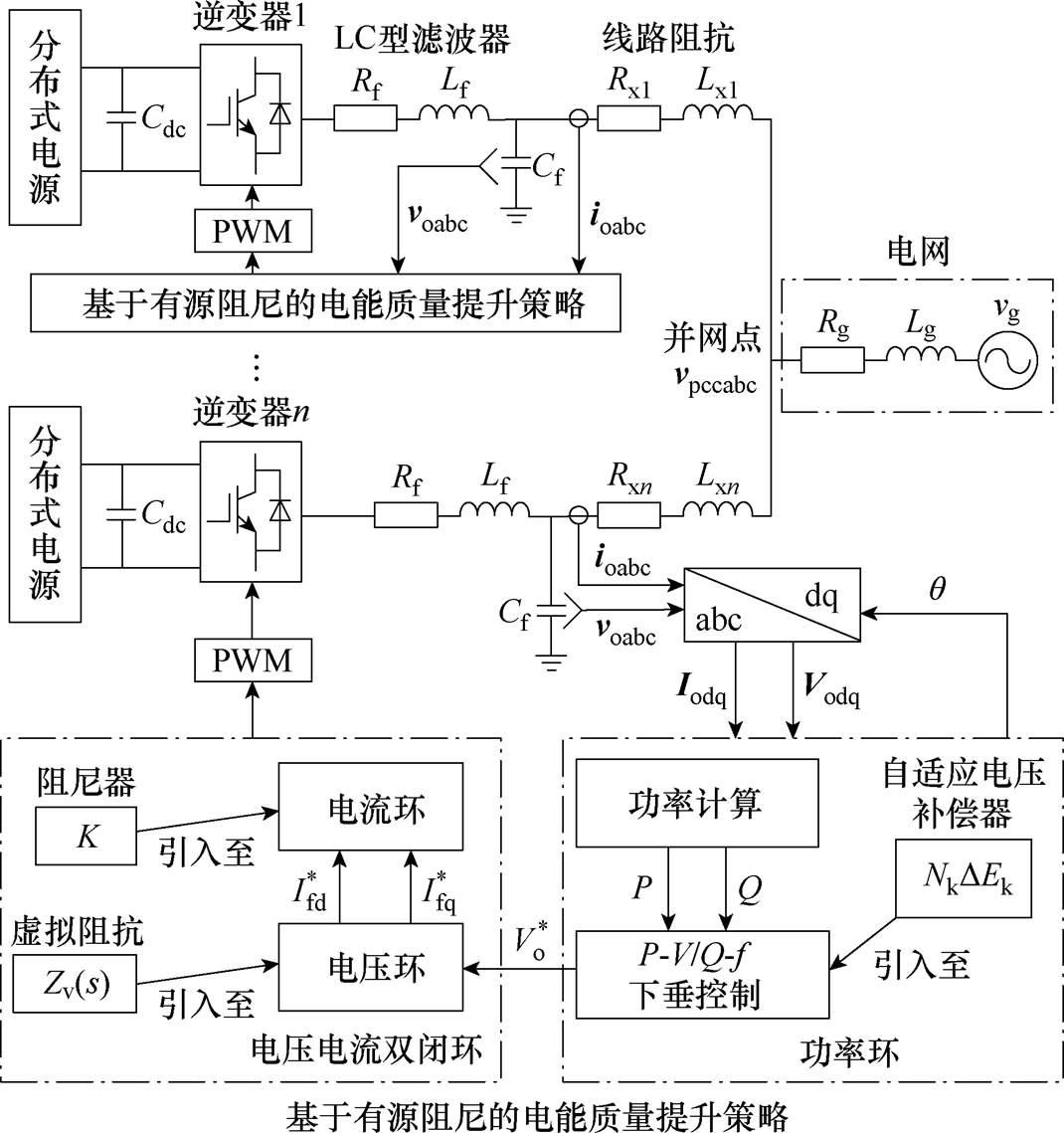
图1为弱电网下多逆变器并联并网系统拓扑结构,系统由两台逆变器接口分布式电源和电网组成。图1中,以两台逆变器来表征多台逆变器并联时的运行情况,Cdc为直流侧电容;Rf、Lf、Cf分别为逆变器侧滤波电阻、滤波电感和滤波电容;Rx、Lx分别为线路电阻和电感;Rg、Lg分别为电网电阻和电感。viabc、ifabc分别为逆变器输出电压和滤波电流;voabc、ioabc分别为滤波后的输出电压和输出电流;vpccabc为公共耦合点电压;vg为电网电压。
图1 多逆变器并网系统拓扑结构
Fig.1 Topological structure of multi-inverter grid-connected system
由系统拓扑结构可知,多逆变器并联并网系统存在着逆变器与逆变器之间和逆变器与电网之间两组模块关系,这两组关系将衍生出动态交互作用、功率不均分以及电压跌落这3个破坏系统稳定性及降低系统电能质量的问题。
为同时解决上述问题,提出基于有源阻尼控制的电能质量提升策略,并同时施加于多逆变器并联并网系统的所有逆变器中,如图1所示。有源阻尼控制由三部分组成:虚拟阻抗Zv(s)、阻尼器K和自适应电压补偿环节。
1.2.1 虚拟阻抗Zv(s)
虚拟阻抗Zv(s)=Rv+sLv,通过输出电流io负反馈的形式引入到交流电压环中;负虚拟电感Lv用于抵消逆变器总输出阻抗中的感性部分,使得逆变器侧输出总阻抗呈现纯阻性,实现有功功率和无功功率之间的解耦;虚拟电阻Rv可增加总输出阻抗以弱化线路阻抗差异的影响,提高逆变器总输出阻抗间的匹配程度,从而实现更高精度的功率均分。引入虚拟阻抗Zv(s)后的电压环动态特性为
 (1)
(1)
 (2)
(2)
式中,H为前馈增益系数;Gv(s)为电压环PI控制器传递函数,Gv(s)=kvp+kvi/s,kvp和kvi分别为电压环比例系数和积分系数;w为角频率;Ifd、Ifq分别为滤波电流ifabc的d、q分量;Vod、Voq和Iod、Ioq分别为滤波后输出电压voabc和输出电流ioabc的d、q直流分量;上标“*”代表参考值,一般情况下 可视为0。
可视为0。
1.2.2 阻尼器K
阻尼器K通过滤波电流if反馈引入至交流电流环中。阻尼器K可通过增加系统阻尼的方式增强系统鲁棒性,从而抑制逆变器与电网间的动态交互作用。引入阻尼器K后的改进电流环动态特性为
 (3)
(3)
 (4)
(4)
式中,Gi(s)为电流P控制器传递函数,Gi(s)=kip,kip为电流环比例系数; 和
和 分别为逆变器输出电压控制信号的d、q轴分量。
分别为逆变器输出电压控制信号的d、q轴分量。
1.2.3 自适应电压补偿环节
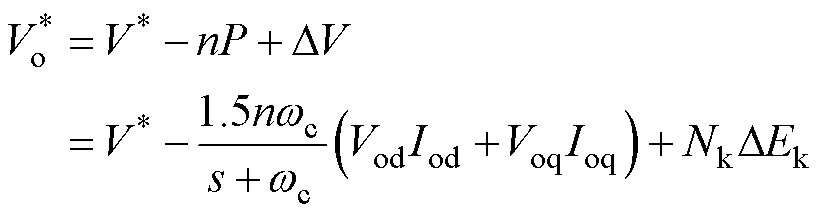
为解决并网电压跌落问题,在下垂控制中引入自适应电压补偿环节。当检测到并网点欠电压时,对并网点电压增加相同的电压补偿,使并网点电压升高至额定范围内;当检测到并网点过电压时,则同步叠加负电压补偿,使并网点电压降低至额定范围内。改进的下垂控制动态特性为
 (5)
(5)
 (6)
(6)
式中,m、n为下垂控制系数; 为角频率的参考值;
为角频率的参考值; 为额定电压幅值参考值;
为额定电压幅值参考值; 为滤波后输出电压参考值;P和Q分别为有功功率和无功功率的平均值;
为滤波后输出电压参考值;P和Q分别为有功功率和无功功率的平均值; 为低通滤波器的截止频率;
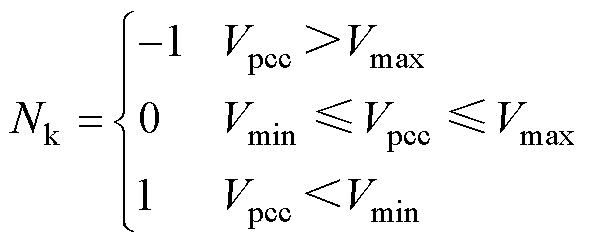
为低通滤波器的截止频率; 为自适应电压补偿值,Ek为电压补偿值,取各逆变器输出电压与额定电压差值的平均值,Nk为判断信号,表示为
为自适应电压补偿值,Ek为电压补偿值,取各逆变器输出电压与额定电压差值的平均值,Nk为判断信号,表示为
 (7)
(7)
式中,Vmax和Vmin分别为额定电压范围的上限和下限。当Nk取-1和1时,对应的分别是负电压补偿和正电压补偿;Nk取0时,不进行电压补偿。
基于式(1)~式(6)所建立的各控制环动态特性,并结合主电路关系,可以得到如图2所示的并网逆变器小信号模型。在图2所示的小信号模型中,以滤波后的输出电流小信号扰动量作为输入,以滤波后的输出电压小信号扰动量作为输出,基于梅逊增益公式,建立二者之间的关系,即可得到并网逆变器的输出阻抗模型为
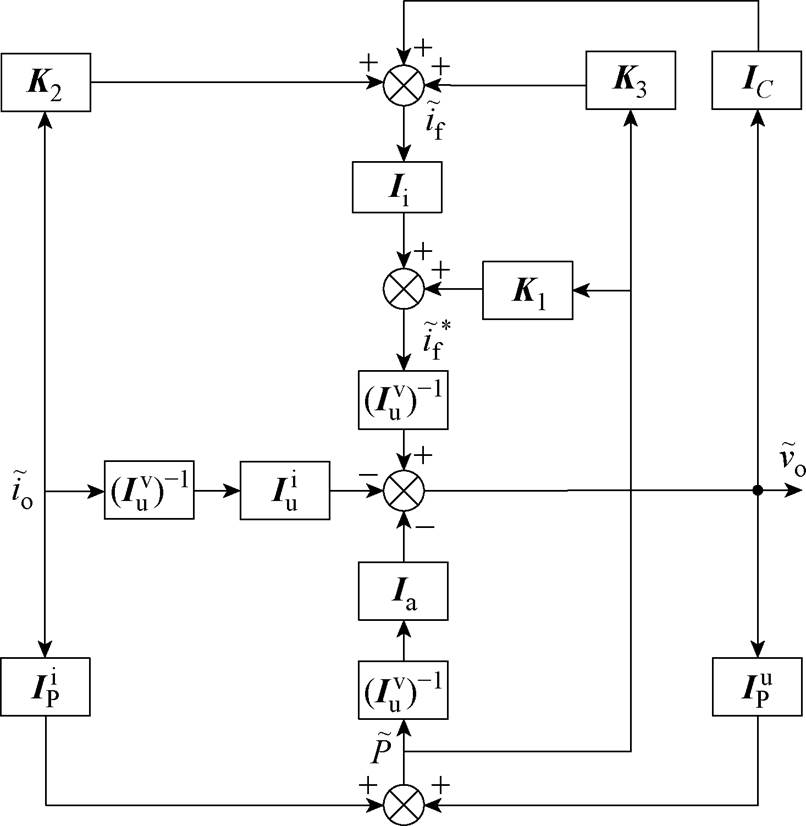
图2 并网逆变器小信号模型
Fig.2 Small signal model for grid-connected inverter
 (8)
(8)
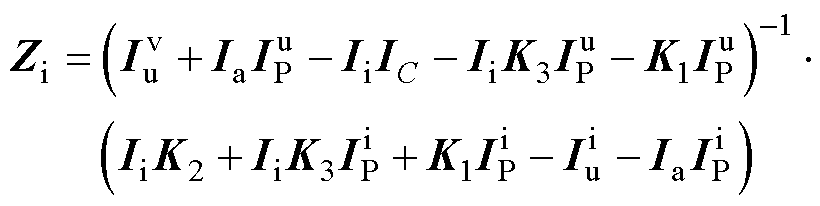
式中,Ii和 分别为电流环矩阵和电压环电流系数矩阵。其余的传递函数矩阵的具体表达式将在附录中给出。在施加了有源阻尼控制策略后,Ii和的表达式分别为
分别为电流环矩阵和电压环电流系数矩阵。其余的传递函数矩阵的具体表达式将在附录中给出。在施加了有源阻尼控制策略后,Ii和的表达式分别为
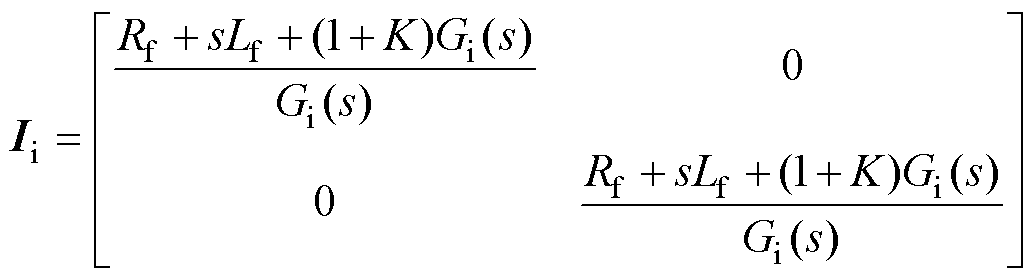 (9)
(9)
 (10)
(10)
将式(1)~式(4)以及式(6)中关于有源阻尼控制策略的部分视为0,采用上述相同的思路,即可建立传统控制下的并网逆变器输出阻抗模型[Zit]2×2,[Zit]2×2中四个子系统分别表示为Zitdd、Zitdq、Zitqd、Zitqq。
弱电网下的电网dq小信号模型为
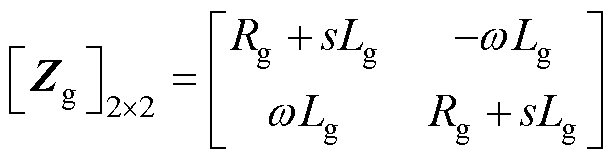 (11)
(11)
传统控制、有源阻尼控制策略对应的逆变器输出阻抗及电网输出阻抗的伯德图如图3所示。由图3可知,在传统控制下,主对角线子系统中的逆变器输出阻抗与电网输出阻抗在低频发生动态交互作用;而在反对角线子系统中,逆变器输出阻抗与电网间仅在高频段存在动态交互。对于以基频50 Hz运行的系统而言,高频部分的动态交互作用对系统的影响较小,而发生在低频的动态交互作用则严重威胁系统稳定性。施加了有源阻尼控制策略后,在四个子系统中均能增大逆变器输出阻抗的幅值,并由于幅值增大的效果,在对系统稳定性影响最大的主对角线子系统上实现了动态交互作用的抑制。
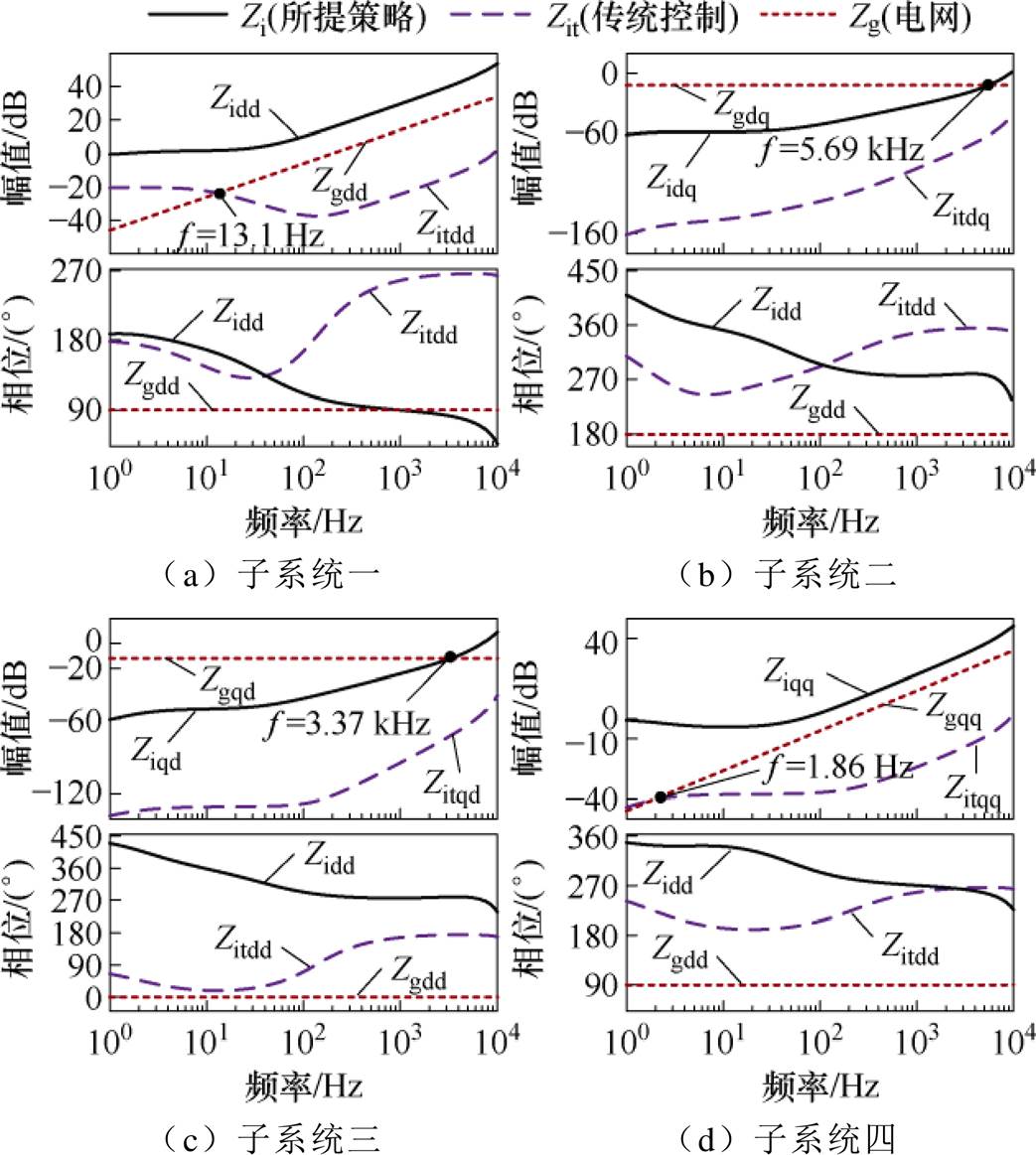
图3 输出阻抗伯德图
Fig.3 Bode plot of output impedance
根据2.1节中的分析可知,主对角线子系统在稳定性分析中起主导作用,在进行稳定性分析时,可忽略反对角线子系统的影响[30]。因此,在主电路和控制环节中的耦合及解耦项可视为0。
以d轴为例分析引入阻尼器K前后,系统阻尼的变化情况。要想得到系统阻尼,需建立起给定输入量 与输出量Vod的小信号扰动量之间的关系,步骤如下:将扰动输入量
与输出量Vod的小信号扰动量之间的关系,步骤如下:将扰动输入量 视为0,忽略耦合项和解耦项,并施加小信号扰动,可以得到
视为0,忽略耦合项和解耦项,并施加小信号扰动,可以得到
 (12)
(12)
在电流内环引入阻尼器K,研究阻尼器K时,为更直观地体现阻尼器K对系统阻尼的影响,可将电压外环比例积分控制器Gv(s)简化为比例环节。对标二阶系统标准表达式可得,施加阻尼器K后的系统阻尼比为
 (13)
(13)
式中, 为传统控制下的阻尼比。
为传统控制下的阻尼比。
由式(13)可知,施加阻尼器K后,系统阻尼比为传统控制下的1+KGi(s)/(Rf+Gi(s))倍。由此可见,阻尼器K可通过增加系统阻尼的方式增强系统的鲁棒性,提高稳定裕度。将系统参数代入式(13)可得,当阻尼器K<37.6时,系统为欠阻尼系统;阻尼器K>37.6时,系统为过阻尼系统。
逆变器侧总输出阻抗[Zo]2×2为逆变器输出阻抗[Zi]2×2与线路阻抗[Zline]2×2(Rx=2 W, Lx=1.5 mH)之和,即
 (14)
(14)
逆变器侧总输出阻抗的实部/虚部以及伯德图如图4所示。图4a为Rv=0 W、Lv在[0, 3] mH变化时,逆变器总输出阻抗子系统Zidd(s)的实部/虚部。Lv=0 mH对应的是传统控制下的曲线。在传统控制下,逆变器总输出阻抗呈阻感性,这将导致有功功率和无功功率之间相互耦合,无法实现功率均分。当引入虚拟电感Lv(s)时,随着虚拟电感值的增大,总输出阻抗的相位不断减小。直至Lv=1.5 mH,此时Lv=Lx,总输出阻抗的虚部变为0,总输出阻抗呈纯阻性,有功功率与无功功率之间完全解耦,此时的Lv为功率均分最佳电感。随着Lv继续增大,总输出阻抗的相位变为负,此时总输出阻抗呈阻容性。
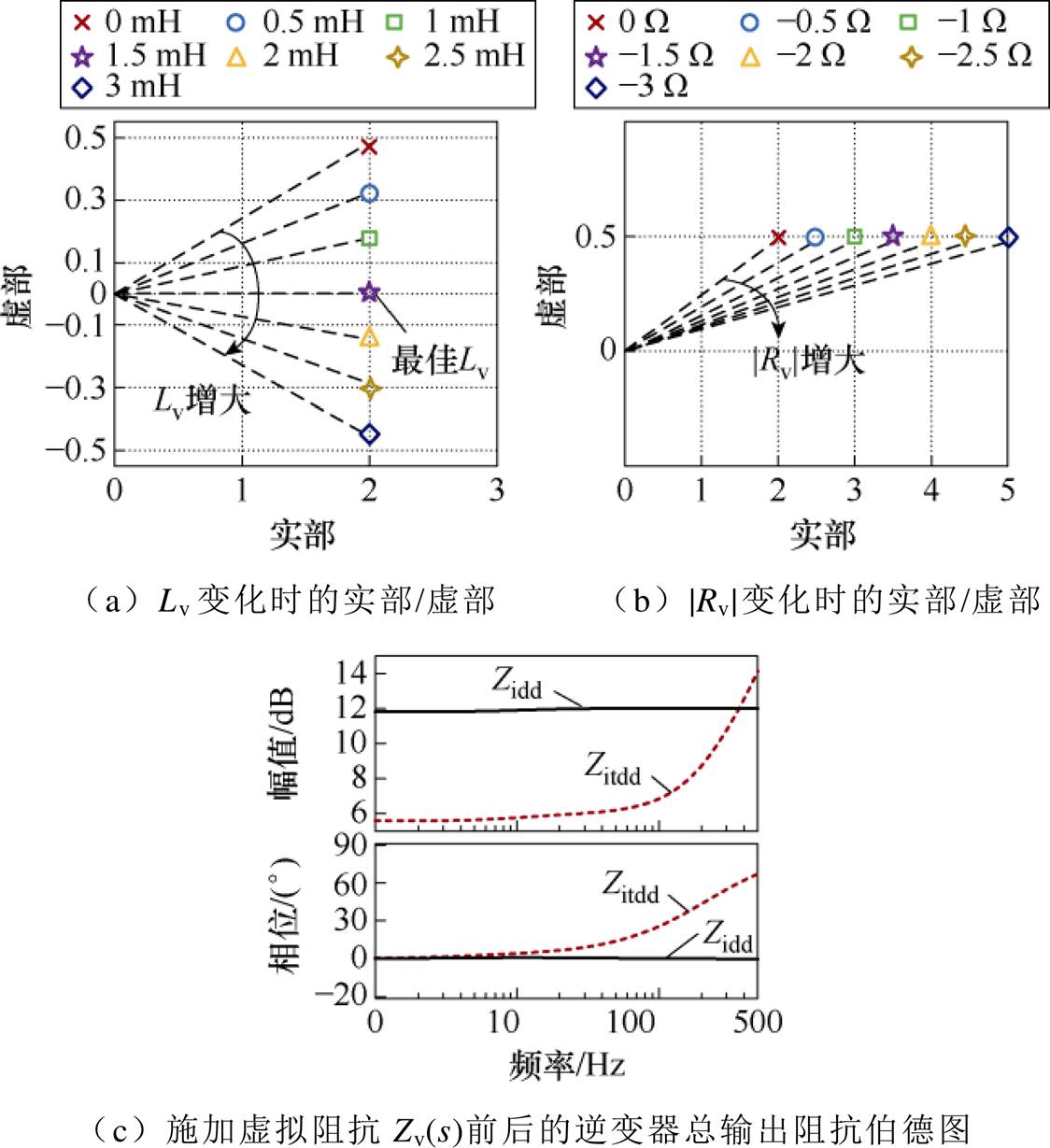
图4 逆变器总输出阻抗的实部/虚部及伯德图
Fig.4 The real/imaginary part plot and the Bode diagram of the inverter total output impedance
图4b为Lv=0、|Rv|在[0, 3] W变化时的实部/虚部。随着|Rv|的增大,逆变器总输出阻抗的阻性部分逐渐增大。
图4c为施加虚拟阻抗前后逆变器总输出阻抗子系统Zidd(s)和Zitdd(s)的伯德图,其中Zitdd为传统控制下对应的曲线,Zidd为引入虚拟阻抗Zv(s)后对应的曲线(Rv=-2 W, Lv=1.5 mH)。通过对比可知,引入虚拟阻抗后,使得原来相位在0°~90°变化的阻感性总输出阻抗,变为在较宽频段内相位恒为0°的纯阻性阻抗。并且,由于虚拟电阻的引入,使得总输出阻抗的幅值增大,并联逆变器线路阻抗之间的差异值相比于逆变器总输出阻抗为较小值,弱化了线路阻抗差异的影响,提高了并联逆变器间总输出阻抗的匹配程度。随着引入的虚拟电阻增大,可以实现更高精度的功率均分。
由图3可知,由于耦合项的存在,多逆变器并联并网系统为多输入-多输出(Maximum Input Maximum Output, MIMO)系统。对于多输入-多输出系统,广义奈奎斯特判据要求需保证系统稳定:逆变器输出阻抗的最小奇异值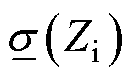 恒大于电网输出阻抗的最大奇异值
恒大于电网输出阻抗的最大奇异值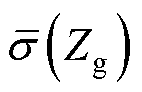 [31],如式(15)所示。输出阻抗的奇异值计算公式如式(16)所示。
[31],如式(15)所示。输出阻抗的奇异值计算公式如式(16)所示。
 (15)
(15)
 (16)
(16)
逆变器输出阻抗最小奇异值与电网输出阻抗最大奇异值(Rg=0.01 mW, Lg=0.8 mH)的频率特性曲线如图5所示。图5a为仅加有源阻尼器K时对应的奇异值频率响应曲线。其中,K=0的曲线为传统控制下的逆变器输出阻抗Zit对应的最小奇异值频率特性曲线。在传统控制下,逆变器输出阻抗最小奇异值曲线与电网最大奇异值曲线存在着f=45 Hz和f=54 Hz两个交点,逆变器与电网之间发生动态交互作用。系统仅在f=[45, 54] Hz这一较窄的频段满足式(15)所示的稳定性判据,在其他频段均违背广义奈奎斯特判据,系统不稳定。
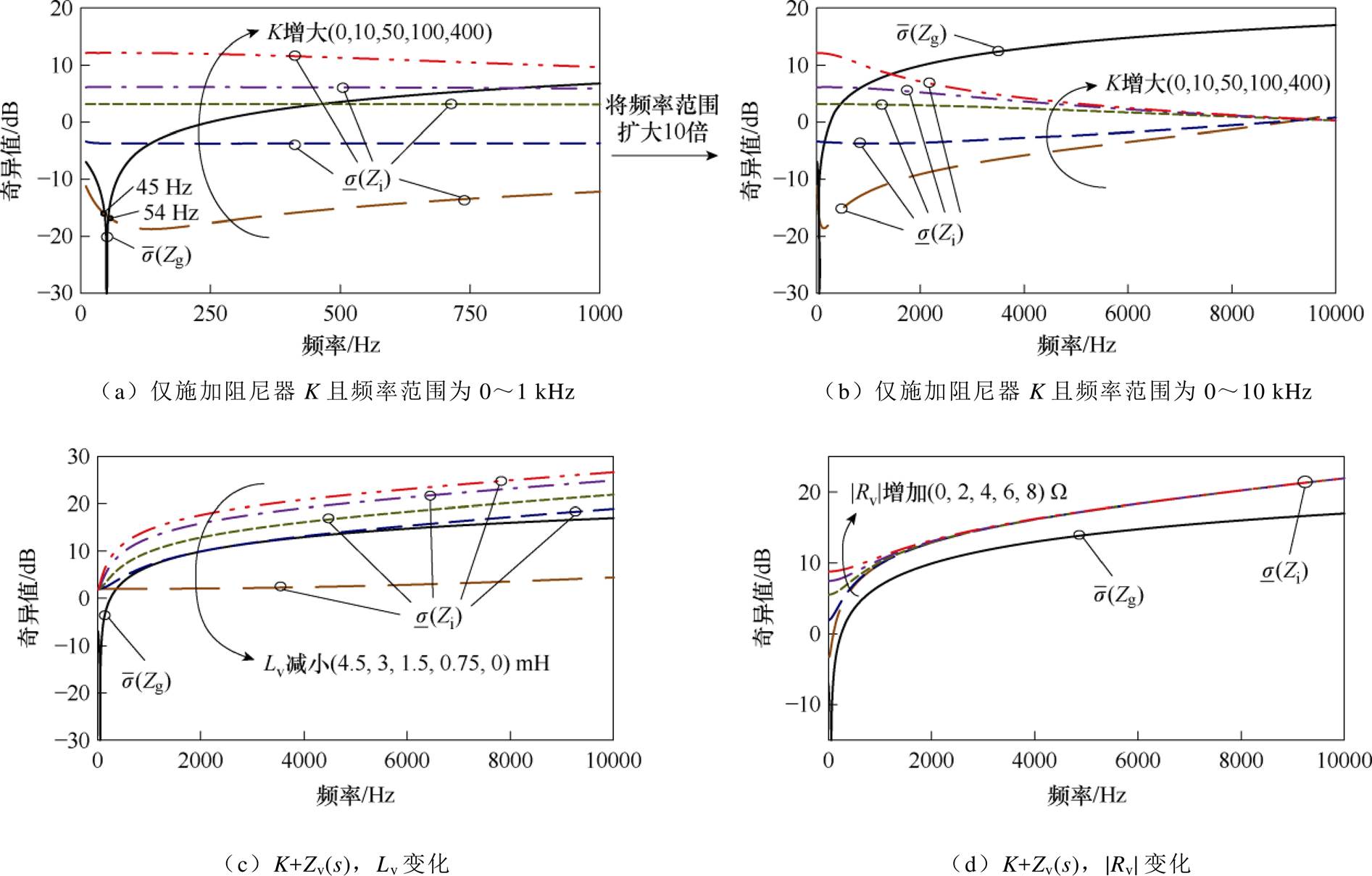
图5 奇异值频率特性曲线
Fig.5 Frequency characteristic curves of singular value
由图5a可知,施加有源阻尼器K后,逆变器输出阻抗最小奇异值曲线上移。随着K值不断增大,逆变器最小奇异值大于电网最大奇异值的频段不断延展。当K值超过某临界值时,在对系统运行影响最大的中低频段,逆变器输出阻抗最小奇异值恒大于电网输出阻抗最大奇异值。因此,通过增大阻尼器K可以有效抑制在中低频段的动态交互作用。
从图5b还能发现另一个规律:随着K增大,逆变器奇异值频率响应曲线的走向从向上倾斜逐步变成向下倾斜。由于电网奇异值频率响应曲线的频率特性是逐渐向上倾斜的,这将产生另一个问题:虽然增大K可通过使逆变器最小奇异值曲线上移的方式让逆变器在中低频段不再与电网发生动态交互作用,但此时的K值所对应的逆变器最小奇异值曲线的频率特性为向下倾斜,这将导致逆变器奇异值曲线与频率特性为向上倾斜的电网奇异值曲线在高频段存在着发生动态交互作用的风险,这一点在图5b中得到验证。
由此可见,可通过阻尼器K抑制中低频段的动态交互作用,提高系统的鲁棒性,但无法仅仅通过有源阻尼器K来规避全频段发生动态交互作用的可能性。对于K的取值,一方面希望通过K提高中低频段的逆变器奇异值;另一方面希望K值不对逆变器奇异值曲线的频率特性产生向下倾斜的影响。因此,K值取中间值,K=50。
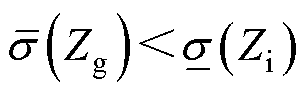
阻尼器K与虚拟阻抗Zv(s)共同作用下的逆变器输出阻抗最小奇异值的频率特性曲线如图5c和图5d所示。图5c为|Rv|固定为2 W的情况下,Lv在[0, 4.5] mH变化时的逆变器输出阻抗最小奇异值频率响应曲线,用以表征虚拟电感Lv对动态交互作用的影响。由图5c可知,引入虚拟电感Lv后,随着Lv的增大,逆变器频率特性曲线的走向逐渐从向下倾斜转变为向上倾斜。当Lv≥0.75 mH时,逆变器奇异值曲线在低中高全频段内均不会与电网奇异值曲线发生动态交互作用。特别地,在2.3节中得到的实现功率均分的最佳Lv取值1.5 mH时,逆变器与电网也不会发生动态交互作用,系统稳定。使之与未加入虚拟电感时的逆变器奇异值曲线对比,Lv不会影响逆变器奇异值的初始值,但在引入Lv后,随着Lv的增加,逆变器输出阻抗最小奇异值曲线的频率特性越来越敏感,并呈现向上倾斜的趋势。因此,虚拟电感的引入可以抵消阻尼器K对曲线在中高频段的不良影响,使得逆变器曲线在高频段与电网奇异值曲线渐行渐远,规避了在高频段发生动态交互作用的风险。
图5d为Lv固定为1.5 mH的情况下,|Rv|在[0, 8] W变化时的逆变器输出阻抗最小奇异值频率响应曲线。虚拟电阻的引入不会改变逆变器曲线在中高频段的频率特性,但|Rv|的引入可以提高逆变器在低频段的奇异值,|Rv|越大,逆变器在低频段的奇异值越大,从而增加系统稳定裕度。
综上所述,阻尼器K可以增大在中低频段的逆变器奇异值,抑制中低频的动态交互作用,在提高系统鲁棒性中起到主导作用;而虚拟阻抗Zv(s)则可以有效弥补阻尼器K在高频段对曲线频率特性的不良影响,规避了在高频段发生动态交互作用的风险。两个控制环节协调配合,实现在低中高全频段对动态交互作用的完全阻抑。动态交互作用的抑制过程见表1。
表1 阻尼器K与虚拟阻抗Zv(s)协同抑制过程
Tab.1 The collaborative suppression process of damper K and virtual impedance Zv(s)
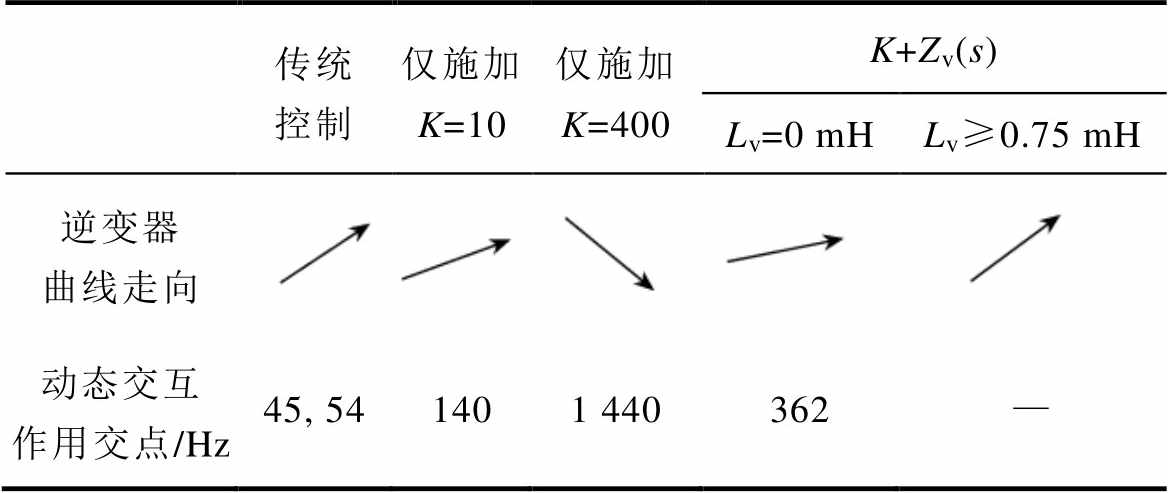
传统控制仅施加K=10仅施加K=400K+Zv(s) Lv=0 mHLv≥0.75 mH 逆变器曲线走向 动态交互作用交点/Hz45, 541401 440362—
为了验证本文所提有源阻尼控制策略的有效性,基于RT-Lab半实物实时系统和DSP控制板组成的硬件在环实验平台,搭建了图1所示的多逆变器并联并网系统。实验平台配备上位机、示波器、OP5707实时仿真系统和DSP控制板。其中,借助RT-Lab系统中的eHS解算器建立多逆变器并网系统的FPGA模型,主电路的采样步长低至250 ns。有源阻尼控制策略在DSP上得以实现。实验参数见表2。在进行施加传统控制策略、仅施加阻尼器K、
表2 实验参数
Tab.2 Experimental parameters
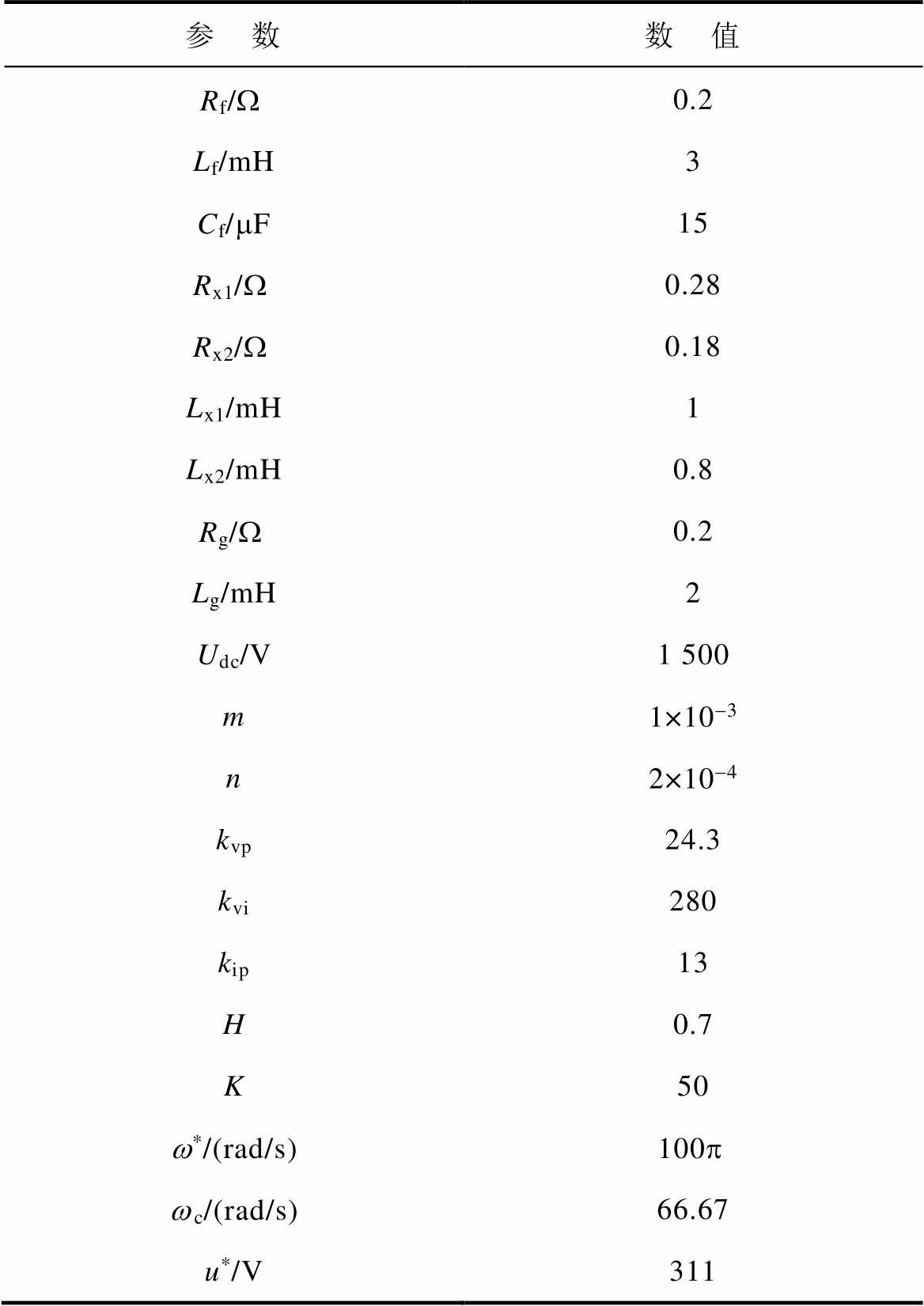
参 数数 值 Rf/W0.2 Lf/mH3 Cf/mF15 Rx1/W0.28 Rx2/W0.18 Lx1/mH1 Lx2/mH0.8 Rg/W0.2 Lg/mH2 Udc/V1 500 m1×10-3 n2×10-4 kvp24.3 kvi280 kip13 H0.7 K50 w*/(rad/s)100p wc/(rad/s)66.67 u*/V311
同时施加阻尼器K和虚拟阻抗Zv(s)以及施加有源阻尼控制策略的实验验证时,多逆变器并联并网系统的所有逆变器同时施加同样的控制策略。
图6为在传统控制策略下的实验波形。由图6可知,采用传统控制策略时,由于逆变器与电网间的动态交互作用,系统振荡失稳,电压、电流以及功率均在多处发生振荡,波形畸变率大。并且在逆变器线路阻抗不一致的条件下,有功功率和无功功率均无法实现均分,此时两台逆变器之间无功功率互为相反数,两台逆变器之间互输无功功率。由此可知,在传统控制策略下,多逆变器并网系统存在着系统振荡失稳、功率不均分问题。
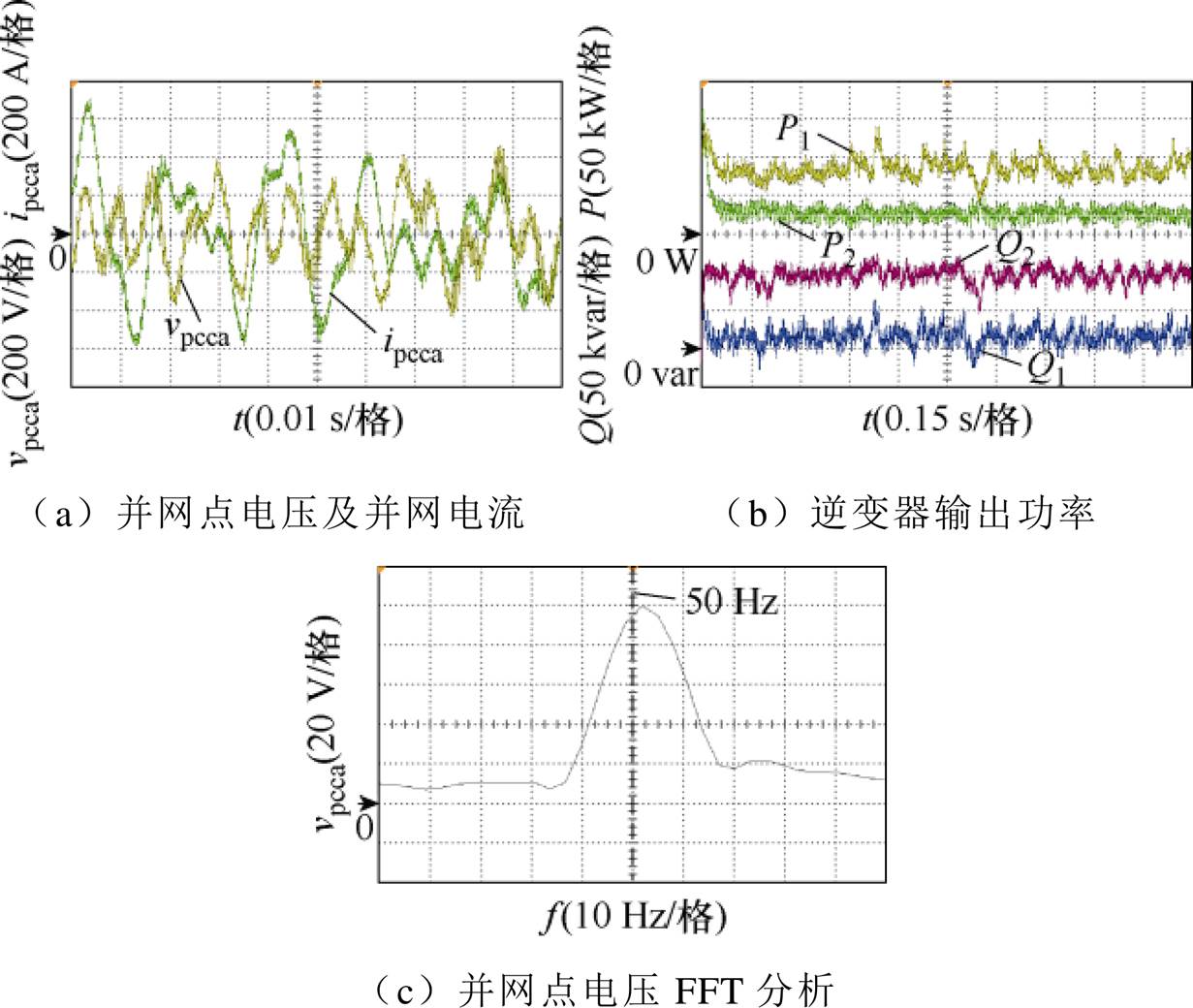
图6 传统控制策略下的实验波形
Fig.6 Experimental waveforms under the traditional control strategy
图7为仅施加阻尼器K时的实验波形。从稳定性角度看,由图7可知,施加K后,系统不再发生振荡,波形畸变率大大降低,系统从不稳定系统变为稳定系统,有效验证了阻尼器K在提升系统稳定性上的显著效果。
从功率输出组成角度看,由图7b可知,两台逆变器输出无功功率均接近0 var,说明系统功率因素接近于1,运行效率高;而从功率差值角度看,由表2可知,线路阻抗差异占比为DR%=DRx/∑Rx%= 21.7%。而由图7b可得,两台逆变器的输出有功功率分别为P1=19 300 W和P2=25 960 W,有功功率差值为DP=6 660 W,功率差值占比为DP/∑P%= 14.7%,这14.7%的有功功率偏差正是由21.7%的线路阻抗差异引起的。有功功率无法均分,降低了系统的运行性能。与此同时,由图7c可知,由于线路阻抗的存在,导致并网点电压有效值跌落至203 V,无法满足系统运行并网点电压要求。因此,引入阻尼器K后,可以有效解决系统振荡失稳问题,提高系统鲁棒性,但仍存在着有功功率无法均分和并网点电压跌落问题。
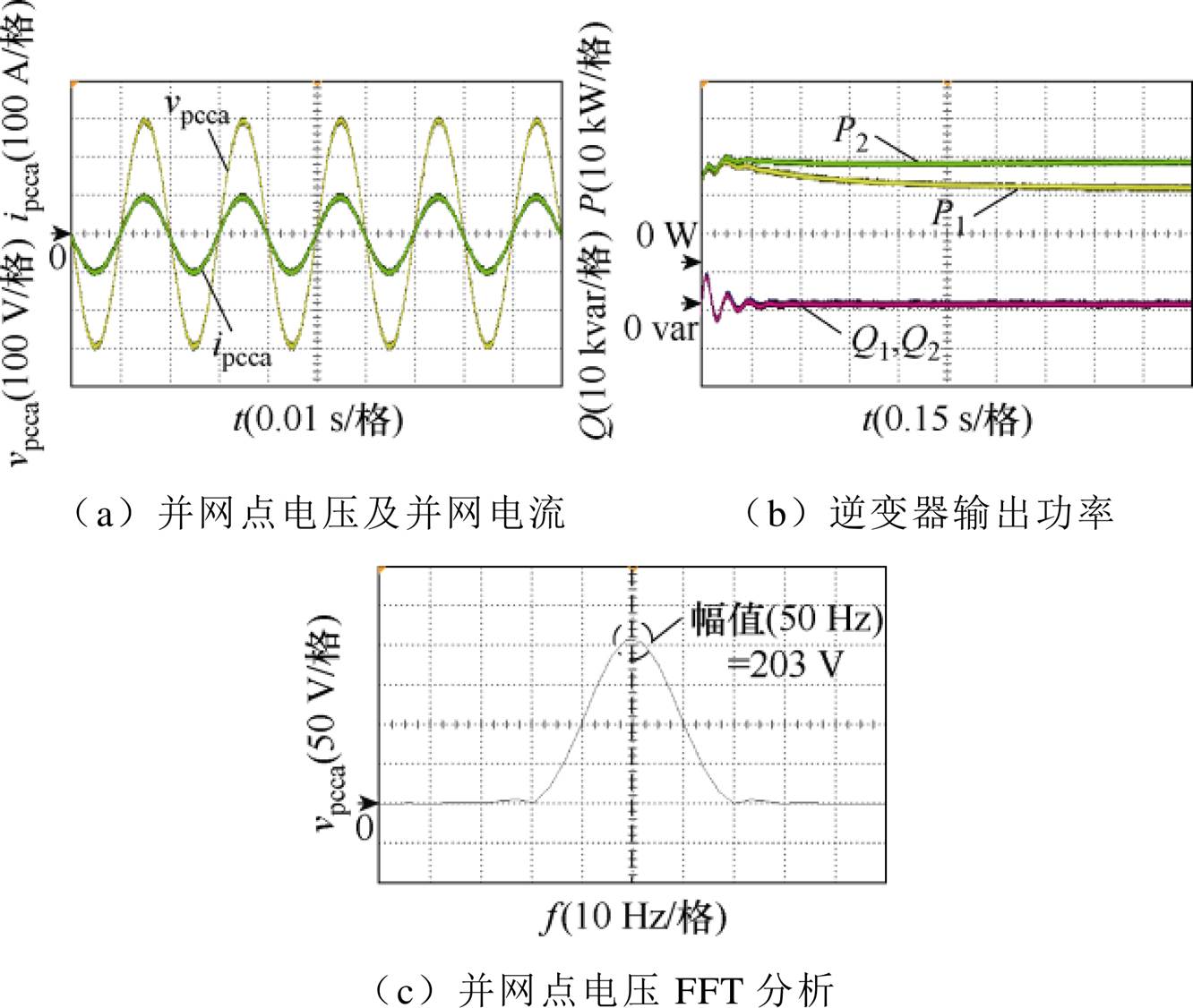
图7 仅施加阻尼器K时的实验波形
Fig.7 Experimental waveforms when only damper K is introduced
当同时施加阻尼器K和虚拟阻抗Zv(s)时,对应的实验波形如图8所示,其中对应的虚拟阻抗参数为Rv1=-1 W, Rv2=-1 W, Lv1=1 mH, Lv2=0.8 mH。由图8可知,在施加虚拟阻抗Zv(s)后,系统为稳定系统,验证了阻尼器K和虚拟阻抗Zv(s)在系统稳定性方面的兼容性。
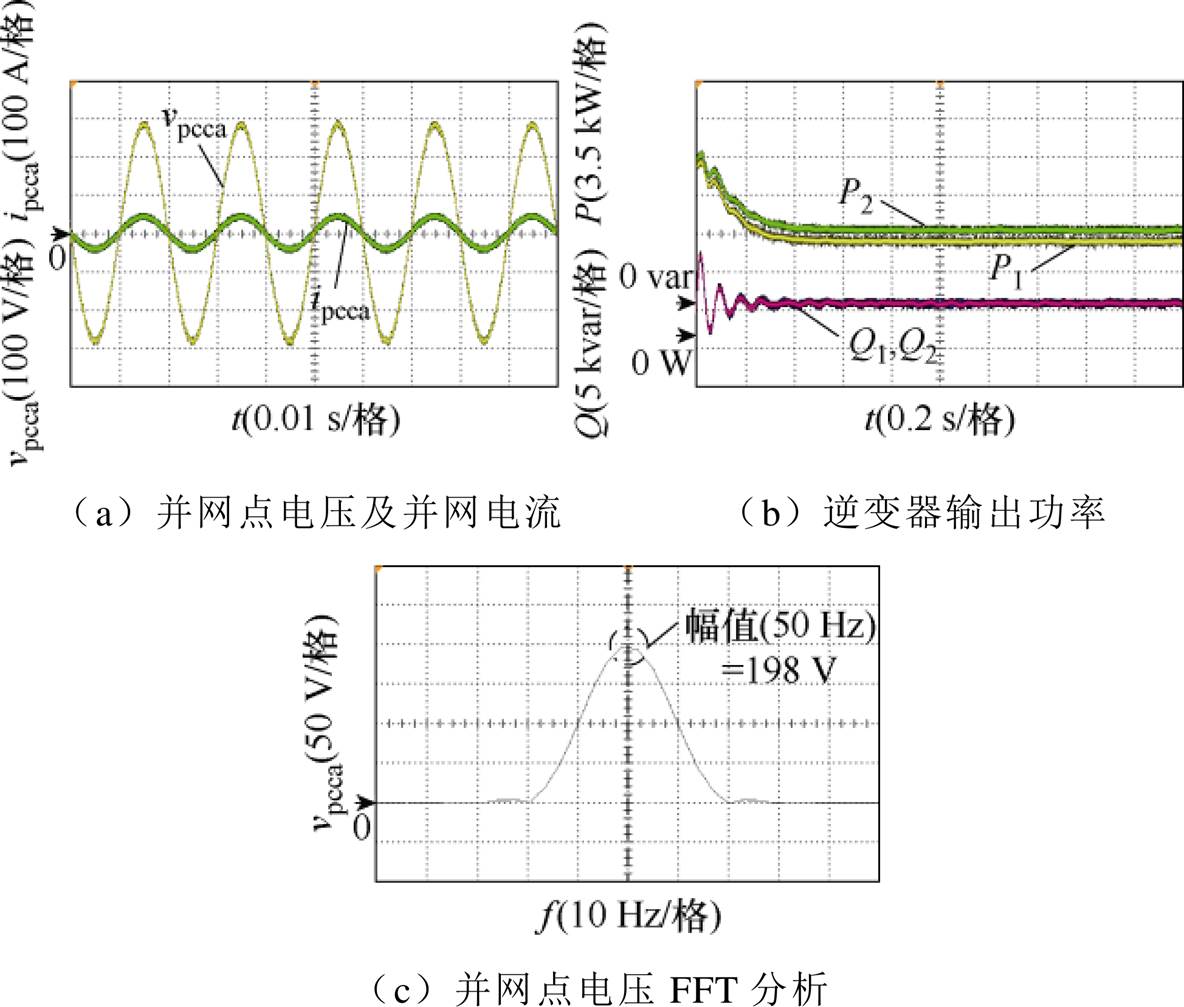
图8 同时施加阻尼器K和虚拟阻抗Zv(s)时的实验波形
Fig.8 Experimental waveforms for applying K+Zv(s)
当施加了虚拟阻抗Zv(s)后,线路阻抗差异占比降低至4%,此时,两台逆变器的总输出阻抗已接近相等。从图8b可知,两台逆变器的输出有功功率分别为P1=8 850 W和P2=9 480 W,有功功率差异占比DP/∑P%=3.4%,实现功率均分。
但与此同时,由图8c可知,在原有的线路阻抗基础上,虚拟阻抗的引入将导致并网点电压进一步降低至198 V,电压偏差为10%,不满足并网电压要求。并且由图8b可知,虚拟阻抗Zv(s)的引入还将降低并网电流值,这导致了逆变器侧输出的有功功率总额从未加入虚拟阻抗时的45 260 W降低至18 330 W,逆变器侧输出效率下降。因此,在加入虚拟阻抗Zv(s)后,系统在稳定的基础上实现了功率的完全均分,但仍存在着电压跌落和输出功率下降的问题。
4.4.1 阻尼器K变化
阻尼器K分别取10,50,400时,阻尼器K、虚拟阻抗Zv(s)和自适应电压补偿环节同时作用的有源阻尼控制策略实验波形如图9所示。由图9a和图9b可知,系统稳定性与阻尼器K取值之间的关系:当阻尼器K=10时,由式(13)可知,系统阻尼比z=0.285,由于引入的阻尼较小,难以提供足够的电网支撑能力,系统在弱电网下仍为不稳定系统。随着阻尼器K增大至50,此时系统阻尼比z= 1.319,所引入阻尼足以提供足够的稳定性支撑能力,系统从不稳定系统变为稳定系统。然而,并非阻尼器K的取值越大越有利于系统稳定性。当阻尼器K进一步增大至400时,系统阻尼比z=10.369,系统阻尼比过大,系统难以收敛至稳定状态。综上所述,引入的阻尼器K过小或过大均不利于提高系统稳定性,因此阻尼器K需取合适值,与3.2节理论分析中的结论一致。后续实验中,均以阻尼器K=50为例进行实验。
当阻尼器K=50时,由图9b可知,逆变器输出有功功率分别为P1=46 660 W和P2=48 710 W,功率差异占比为DP/∑P%=2.1%,此时逆变器1和逆变器2的输出有功功率实现均分。两台逆变器的无功功率始终重合,无功功率也得到均分。
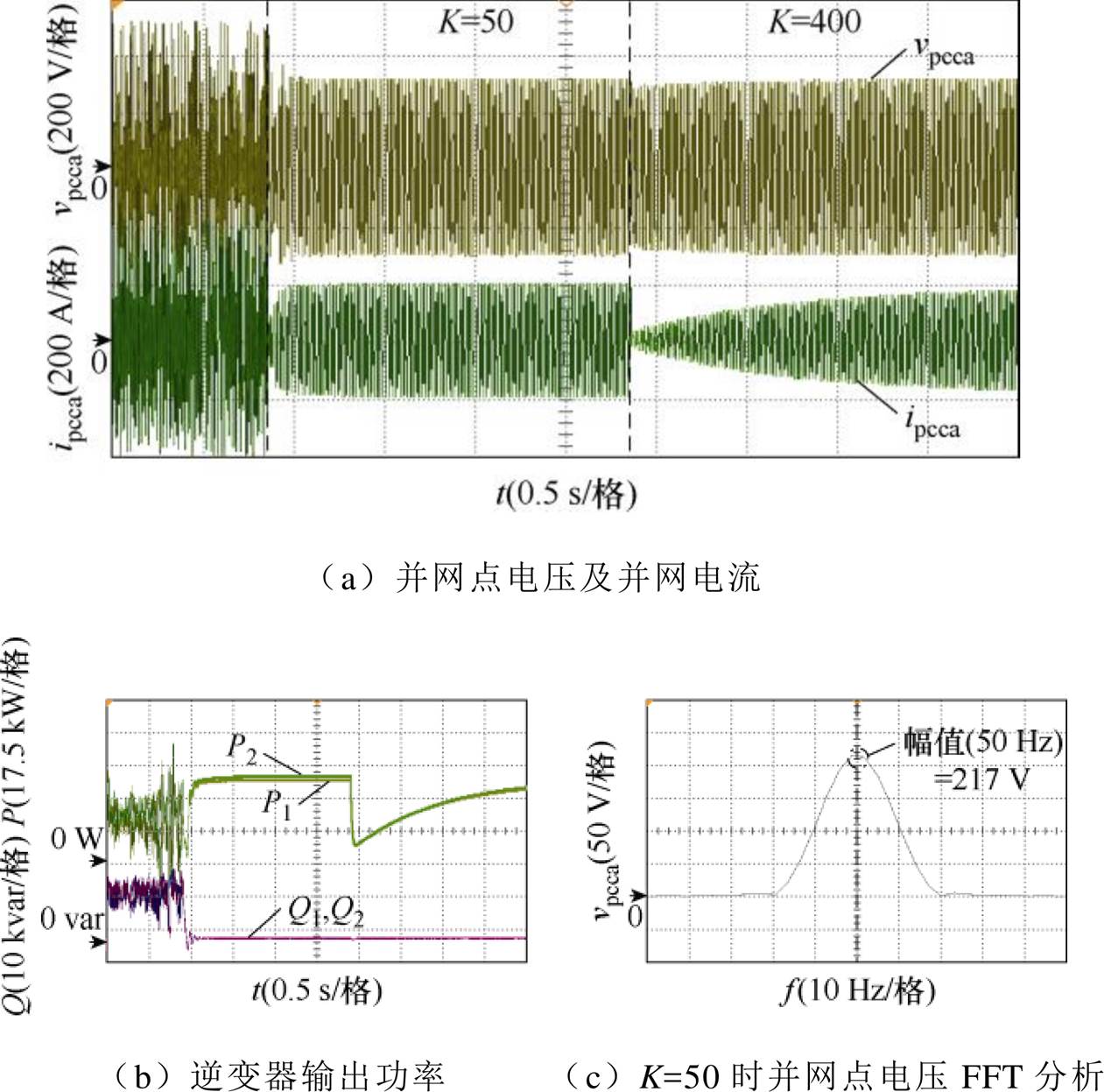
图9 K变化时有源阻尼控制策略的实验波形
Fig.9 Experimental waveforms of active damping control strategy when damper K changes
自适应电压补偿环节可以补偿线路阻抗和控制环节的压降。从图9c可知,并网点电压有效值恢复至217 V,与220 V标准并网点电压有效值的偏差仅为1.3%,满足电压要求。此外,在引入施加自适应电压补偿环节后,由图9a可知,并网电流相比于图8a有了较大提升,这直接体现在了图9b的逆变器侧总输出有功功率∑P=95 370 W,相比于仅施加阻尼器K以及同时施加阻尼器K和虚拟阻抗Zv(s)时的总输出有功功率有了显著提升。这表明自适应电压补偿环节不仅可以实现并网点电压恢复,还可以提高逆变器侧的总输出功率,提升了系统的工作效率。
综上所述,得益于阻尼器K、虚拟阻抗Zv(s)和自适应电压补偿环节之间的兼容性,使得有源阻尼控制策略兼具良好的系统稳定性提高能力、功率精确精分能力、电压恢复能力以及输出功率提升能力。
4.4.2 电网阻抗Zg(s)变化
施加有源阻尼控制策略,不同电网阻抗下的实验波形如图10所示。电网阻抗Zg1(s)=0.2+0.002s下的实验结论与图9中K=50时的实验结论一致。当电网从Zg1(s)切换到更弱电网Zg2(s)=0.2+0.004s时,由图10a可知,在有源阻尼控制策略作用下,系统仍为稳定系统。由图10b可得,Zg2(s)下逆变器的输出有功功率P1=42 300 W和P2=44 280 W,功率差异占比DP/∑P%=2.3%,且无功功率波形始终重叠,有功和无功功率均可实现均分。由图10a和图10c可知,当电网切换至更弱电网时,在有源阻尼控制策略中自适应电压补偿环节作用下,并网点电压和并网电流均得到补偿,满足并网点电压要求和保证逆变器输出效率。综上所述,所提有源阻尼控制策略对于电网阻抗具有较好的鲁棒性。
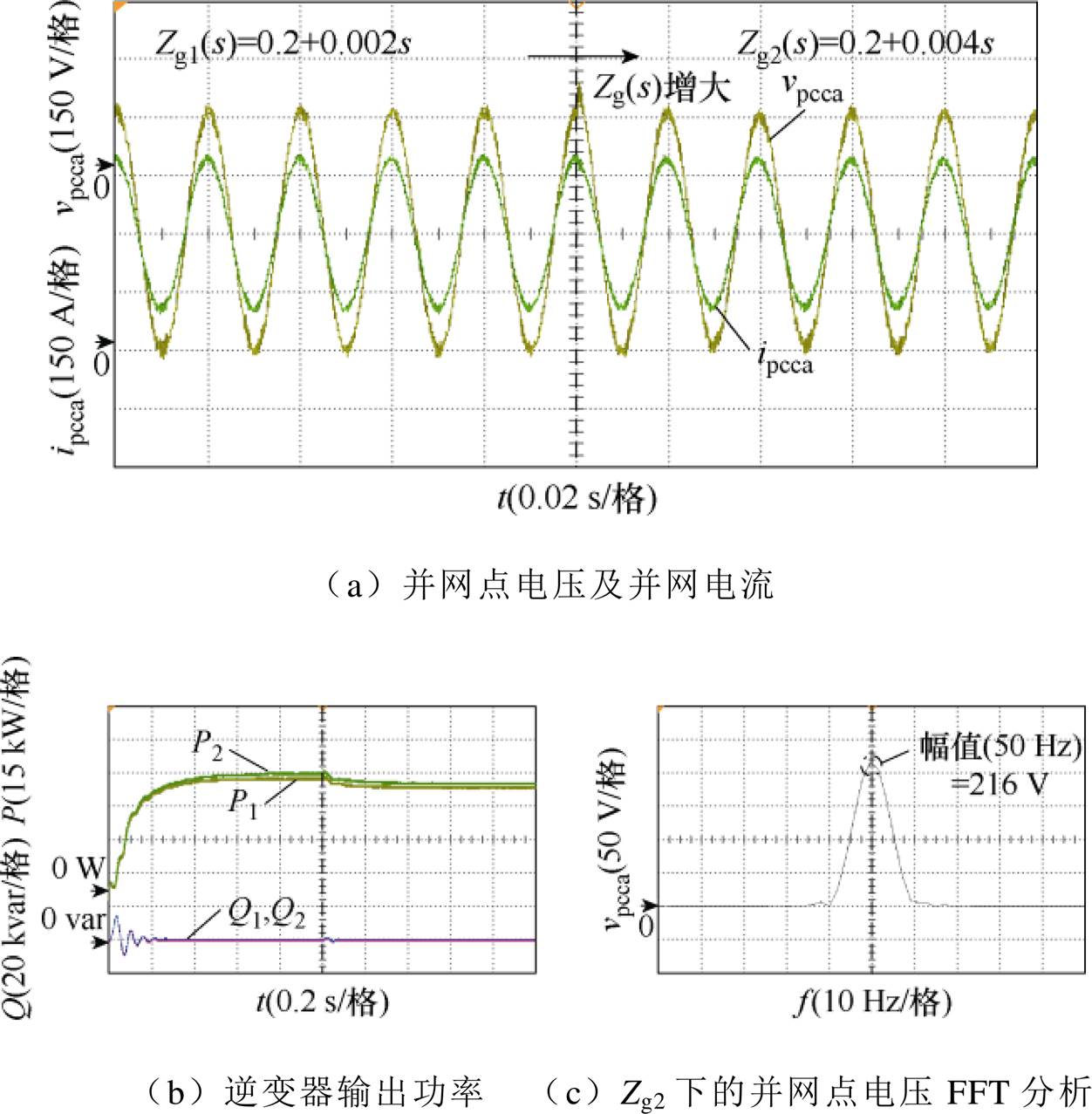
图10 不同电网阻抗下的实验波形
Fig.10 Experimental waveforms under different gird impedances
4.4.3 虚拟阻抗Zv(s)变化
施加有源阻尼控制策略后,当引入的虚拟阻抗Zv(s)发生变化时的实验波形如图11所示。图11中,虚拟阻抗参数组1的两台逆变器虚拟阻抗参数分别为:Rv1=-1 W, Lv1=1 mH, Rv2=-1 W, Lv2=0.8 mH;虚拟阻抗参数组2的两台逆变器虚拟阻抗参数分别为:Rv1=-5 W, Lv1=1 mH, Rv2=-5 W, Lv2=0.8 mH。为保证有功功率和无功功率之间相互解耦,由2.3节的理论分析可知,参数组1和2之间所引入的虚拟电感值均需与对应的线路电感一致。因此,参数组1和2之间的差别为参数组2增大了虚拟电阻。参数组1对应的工况与图9中K=50时的一致,因此实验结论也与其一致,由4.4.1节可知,采用参数组1时对应的功率差占比为2.1%。而由图11a可知,当采用虚拟电阻较大的参数组2时,两台逆变器的有功功率波形几乎重叠,分别为P1=38 860 W和P2=39 030 W,功率差异占比DP/∑P%=0.22%,功率偏差相比于参数组1有了进一步的下降,实现了功率的精确均分。由此可以验证,随着虚拟电阻的增大,可以实现更高精度的功率均分,与2.3节中理论分析的结论一致。由图11b和图11c可知,在有源阻尼控制策略及另外两个有源阻尼环节的协同配合下,虚拟电阻增大时,系统仍然能保持稳定且可以满足并网点电压要求。
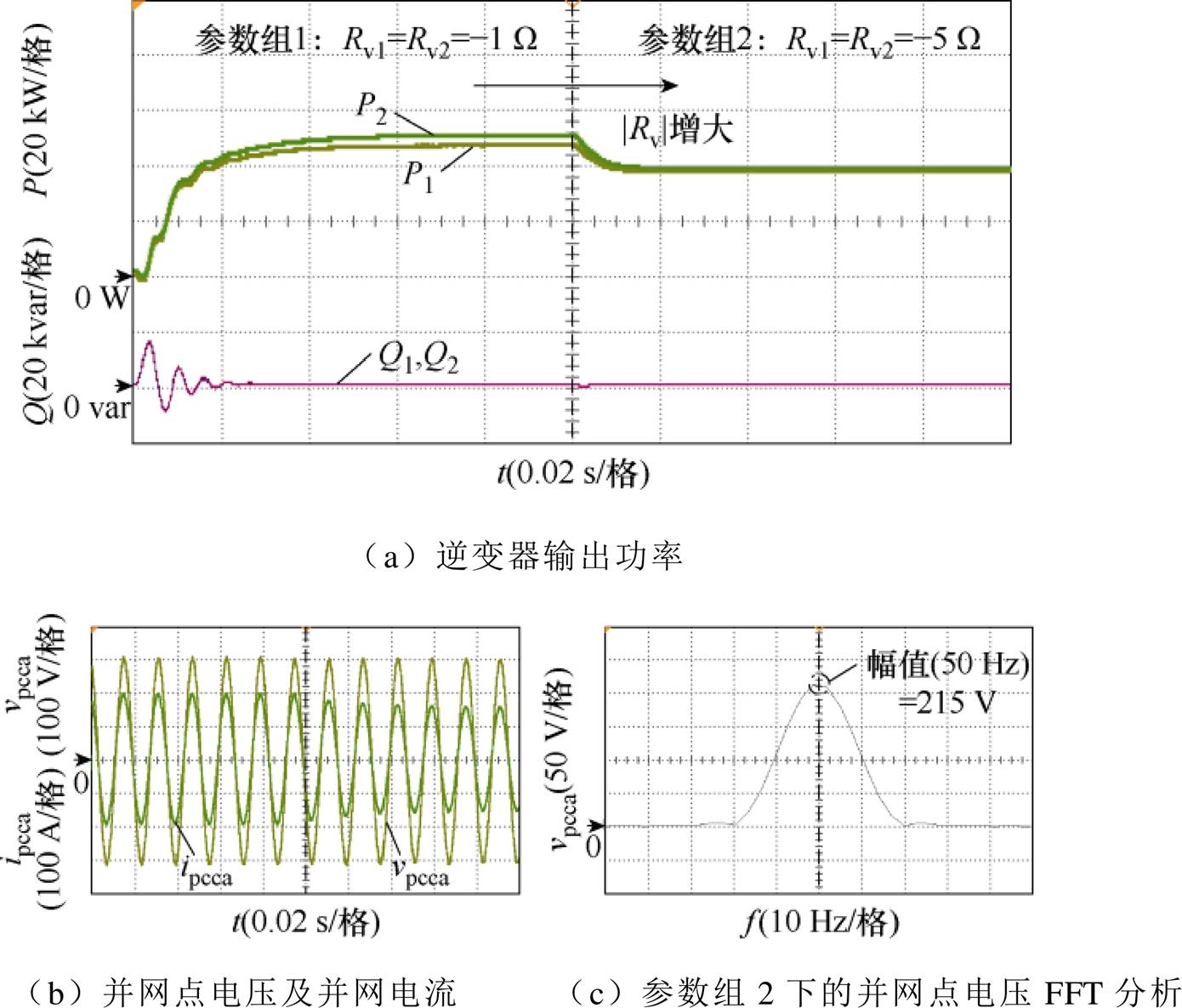
图11 虚拟阻抗增大时的实验波形
Fig.11 Experimental waveforms when the virtual impedance increases
4.4.4 多逆变器并联
上述实验为两台逆变器并联时的实验结果,为进一步验证所提有源阻尼控制策略在更多台逆变器并联并网系统中的适应性,逆变器并联台数增加时对应的实验数据总结如图12所示。图12中,以并网电流畸变率、并网点电压偏差以及有功和无功功率的差异占比作为衡量指标,来表征在更多台逆变器并联并网系统中施加所提方法后,系统的稳定性、电压恢复能力以及有功和无功功率的均分情况。由图12可知,当并联逆变器台数从3台逐步增加到7台时,在所提有源阻尼控制策略的作用下,并网电流畸变率始终低于0.5%,远低于5%的电流畸变率要求;并网点电压偏差始终低于2.5%,满足电压要求;有功功率差异占比始终低于3%,无功功率差异占比接近于0,功率精确均分。综上所述,随着并联逆变器台数的增加,所提有源阻尼控制策略依然可以提升系统在弱电网条件下的稳定性,并且实现功率精确均分和电压恢复,验证了所提策略在更多台数逆变器并联并网系统中的适应性。
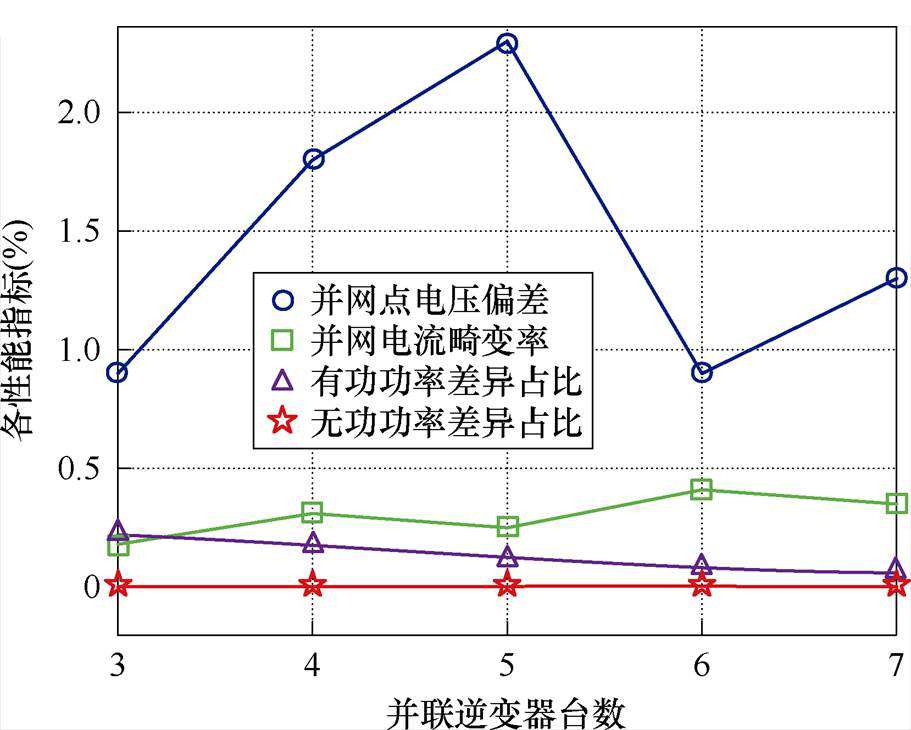
图12 并联逆变器台数增加时的实验数据
Fig.12 Experimental data with increasing numbers of parallel inverters
本文以多逆变器并网系统为研究对象,提出一种基于有源阻尼控制的电能质量提升策略,同时解决动态交互作用、功率不均分以及电压降落问题,并重点研究了有源阻尼器间的交互作用及其对振荡抑制的提升效果,得出以下结论:
1)有源阻尼器K和虚拟阻抗Zv(s)之间存在着交互作用,在振荡抑制上起到了相互促进、协同配合的效果,二者分别在中低频和高频的动态交互作用的抑制中发挥作用,从而在全频段完全规避了发生动态交互作用的风险,大大提高了系统的鲁棒性。
2)通过引入虚拟阻抗Zv(s)还可以对逆变器总输出阻抗进行重塑,在虚拟阻抗Zv(s)作用下,逆变器间的输出功率差异可降低至0.22%,实现精确功率均分。
3)自适应电压恢复模块不仅可以将并网点电压偏差从10%降低至1.3%,通过电压补偿使并网点电压满足要求,还能将逆变器输出有功功率从18 330 W大幅提升至95 370 W,提高了工程应用价值。
附 录
逆变器输出阻抗模型中传递函数矩阵的具体表达式:
系数矩阵K1为
 (A1)
(A1)
电压环电压系数矩阵 为
为
 (A2)
(A2)
式中,wo为角频率稳态值;上标“o”代表着该变量对应的稳态值。
耦合矩阵Ia为
 (A3)
(A3)
系数矩阵K2为
 (A4)
(A4)
电容矩阵IC为
 (A5)
(A5)
系数矩阵K3为
 (A6)
(A6)
功率环电压系数矩阵 为
为
 (A7)
(A7)
功率环电流系数矩阵 为
为
 (A8)
(A8)
参考文献
[1] 高本锋, 刘培鑫, 孙大卫, 等. 构网/跟网型混合风电场次同步振荡特性与机理分析[J]. 电工技术学报, 2025, 40(6): 1945-1959.
Gao Benfeng, Liu Peixin, Sun Dawei, et al. Analysis of subsynchronous oscillation characteristics and mechanism of grid-forming/grid-following hybrid wind farms[J]. Transactions of China Electrotechnical Society, 2025, 40(6): 1945-1959.
[2] 彭程, 徐建勇, 赵书琪, 等. 考虑分层碳排放的多时间尺度光储充一体站日前运行策略[J]. 电气技术, 2025, 26(1): 1-13, 63.
Peng Cheng, Xu Jianyong, Zhao Shuqi, et al. Day- ahead operation strategy for a multi-timescale integrated photovoltaic storage and charging station considering carbon emission stratification[J]. Electrical Engineering, 2025, 26(1): 1-13, 63.
[3] 张斌, 张学广, 徐殿国. 构网型与跟网型变流器混联并网系统配比关键影响因素分析[J]. 电力系统自动化, 2025, 49(1): 47-58.
Zhang Bin, Zhang Xueguang, Xu Dianguo. Analysis on key influence factors of ratio of grid-forming and grid-following converters in hybrid parallel grid- connected system[J]. Automation of Electric Power Systems, 2025, 49(1): 47-58.
[4] Hu Bin, Zhan Ling, Nian Heng, et al. PLL frequency stability enhancement under weak grid considering reactive current support[J]. CES Transactions on Electrical Machines and Systems, 2025, 9(1): 110- 114.
[5] 吴旭, 王伟, 肖华锋, 等. 并网逆变器整体序阻抗建模方法及其稳定性分析[J]. 中国电机工程学报, 2024, 44(9): 3645-3656.
Wu Xu, Wang Wei, Xiao Huafeng, et al. Overall sequence impedance model of grid-connected inverter and its stability analysis[J]. Proceedings of the CSEE, 2024, 44(9): 3645-3656.
[6] 王鹏飞, 陈家伟, 罗超, 等. 跟网型逆变器同步稳定性分析及增强控制方法[J]. 电工技术学报, 2026, 41(7): 2397-2410.
Wang Pengfei, Chen Jiawei, Luo Chao, et al. Syn- chronous stability analysis and enhancement control method for grid-following inverters[J]. Transactions of China Electrotechnical Society, 2026, 41(7): 2397- 2410.
[7] 郑凯元, 杜文娟, 王海风. 混联多微电网系统动态交互作用及稳定性分析[J]. 中国电机工程学报, 2021, 41(16): 5552-5569.
Zheng Kaiyuan, Du Wenjuan, Wang Haifeng. Analysis on dynamic interactions and stability of hybrid multi-microgrids[J]. Proceedings of the CSEE, 2021, 41(16): 5552-5569.
[8] Li Ming, Zhang Xing, Guo Zixuan, et al. The control strategy for the grid-connected inverter through impe- dance reshaping in q-axis and its stability analysis under a weak grid[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(3): 3229-3242.
[9] 陈杰, 刘名凹, 陈新, 等. 基于下垂控制的逆变器无线并联与环流抑制技术[J]. 电工技术学报, 2018, 33(7): 1450-1460.
Chen Jie, Liu Ming’ao, Chen Xin, et al. Wireless parallel and circulation current reduction of droop- controlled inverters[J]. Transactions of China Elec- trotechnical Society, 2018, 33(7): 1450-1460.
[10] Wang Xinsheng, Zhang Jiancheng, Zheng Mingli, et al. A distributed reactive power sharing approach in microgrids with improved droop control[J]. CSEE Journal of Power and Energy Systems, 2021, 7(6): 1238-1246.
[11] Wai R J, Zhang Quanquan, Wang Yu. A novel voltage stabilization and power sharing control method based on virtual complex impedance for an off-grid micro- grid[J]. IEEE Transactions on Power Electronics, 2019, 34(2): 1863-1880.
[12] 刘腾飞, 田艳军, 姜玉霞, 等. 基于有源阻尼电流观测器的并网逆变器无电流传感器反馈控制[J]. 中国电机工程学报, 2022, 42(19): 7182-7194.
Liu Tengfei, Tian Yanjun, Jiang Yuxia, et al. Active damped current observer oriented current sensorless feedback control for grid connected inverter[J]. Proceedings of the CSEE, 2022, 42(19): 7182-7194.
[13] 李明明, 肖华锋. 负带通滤波器反馈进网电流有源阻尼方法的实现技术研究[J]. 中国电机工程学报, 2022, 42(10): 3729-3738.
Li Mingming, Xiao Huafeng. Research on the technology of realizing active damping based on negative Band-pass filter feedback of grid current[J]. Proceedings of the CSEE, 2022, 42(10): 3729-3738.
[14] Li Shaojie, Lin Hua. A capacitor-current-feedback positive active damping control strategy for LCL-type grid-connected inverter to achieve high robustness[J]. IEEE Transactions on Power Electronics, 2022, 37(6): 6462-6474.
[15] Lin Zhiheng, Ruan Xinbo, Wu Liguo, et al. Multi resonant component-based grid-voltage-weighted feed- forward scheme for grid-connected inverter to suppress the injected grid current harmonics under weak grid[J]. IEEE Transactions on Power Elec- tronics, 2020, 35(9): 9784-9793.
[16] 杨树德, 李旺, 徐佳, 等. 基于并网电流谐波微分的有源阻尼策略[J]. 电工技术学报, 2023, 38(23): 6305-6317.
Yang Shude, Li Wang, Xu Jia, et al. Research on active damping strategy based on the differentiation of injected grid current harmonics[J]. Transactions of China Electrotechnical Society, 2023, 38(23): 6305- 6317.
[17] Cai Yuxi, He Yingjie, Zhou Hongwei, et al. Active- damping disturbance-rejection control strategy of LCL grid-connected inverter based on inverter-side- current feedback[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(6): 7183-7198.
[18] 曹子恒, 肖先勇, 马俊鹏, 等. 提高LCL型并网逆变器鲁棒性的改进型电容电流反馈有源阻尼策略[J]. 高电压技术, 2020, 46(11): 3781-3790.
Cao Ziheng, Xiao Xianyong, Ma Junpeng, et al. Novel capacitor current feedback active damping strategy for enhancing robustness of LCL-type grid-connected inverters[J]. High Voltage Engineering, 2020, 46(11): 3781-3790.
[19] 郑堃, 周林, 龙贵欣, 等. 一种针对数字控制下光伏并网逆变器的陷波器滞后补偿方法[J]. 中国电机工程学报, 2019, 39(6): 1749-1757, 1871.
Zheng Kun, Zhou Lin, Long Guixin, et al. A lag compensation method based on Notch filter for PV grid-connected inverter under digital control[J]. Proceedings of the CSEE, 2019, 39(6): 1749-1757, 1871.
[20] 高磊, 吕敬, 马骏超, 等. 基于电路等效的并网逆变器失稳分析与稳定控制[J]. 电工技术学报, 2024, 39(8): 2325-2341.
Gao Lei, Lü Jing, Ma Junchao, et al. Instability analysis and stability control of grid-connected inverter based on impedance circuit equivalent[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2325-2341.
[21] Cao Wenyuan, Han Minxiao, Zhang Xiahui, et al. An integrated synchronization and control strategy for parallel-operated inverters based on V-I droop characteristics[J]. IEEE Transactions on Power Electronics, 2022, 37(5): 5373-5384.
[22] Ramezani M, Li Shuhui, Sun Yang. Combining droop and direct current vector control for control of parallel inverters in microgrid[J]. IET Renewable Power Generation, 2017, 11(1): 107-114.
[23] 王鹏程, 陈敏, 朱冠南, 等. 基于电压补偿的下垂控制变换器功率解耦策略[J]. 电工技术学报, 2026, 41(3): 821-833.
Wang Pengcheng, Chen Min, Zhu Guannan, et al. Voltage compensation-based power decoupling strategy for droop control converters[J]. Transactions of China Electrotechnical Society, 2026, 41(3): 821-833.
[24] 姜恩宇, 施峥靖, 赵吉康, 等. 基于时序分阶段控制的网状微电网功率均分策略[J]. 太阳能学报, 2022, 43(8): 490-497.
Jiang Enyu, Shi Zhengjing, Zhao Jikang, et al. Power sharing strategy for meshed microgrid based on time sequence and stage control[J]. Acta Energiae Solaris Sinica, 2022, 43(8): 490-497.
[25] Moussa H, Shahin A, Martin J P, et al. Optimal angle droop for power sharing enhancement with stability improvement in islanded microgrids[J]. IEEE Transa- ctions on Smart Grid, 2018, 9(5): 5014-5026.
[26] 范必双, 付思维, 王文, 等. 基于自适应虚拟电阻的低压微电网有功均分下垂控制策略[J]. 电机与控制学报, 2024, 28(5): 142-153.
Fan Bishuang, Fu Siwei, Wang Wen, et al. Active power sharing droop control strategy for low-voltage microgrid based on adaptive virtual resistance[J]. Electric Machines and Control, 2024, 28(5): 142-153.
[27] Chen Yandong, Guerrero J M, Shuai Zhikang, et al. Fast reactive power sharing, circulating current and resonance suppression for parallel inverters using resistive-capacitive output impedance[J]. IEEE Transa- ctions on Power Electronics, 2016, 31(8): 5524-5537.
[28] Guan Yajuan, Guerrero J M, Zhao Xin, et al. A new way of controlling parallel-connected inverters by using synchronous-reference-frame virtual impedance loop: part I: control principle[J]. IEEE Transactions on Power Electronics, 2016, 31(6): 4576-4593.
[29] 彭志豪, 黄海益, 杨苓. 一种具有自适应电压补偿和恢复功能的微电网功率均分策略[J]. 太阳能学报, 2023, 44(7): 61-70.
Peng Zhihao, Huang Haiyi, Yang Ling. A microgrid power sharing strategy with adaptive voltage com- pensation and restoration[J]. Acta Energiae Solaris Sinica, 2023, 44(7): 61-70.
[30] Liu Bin, Li Zhen, Dong Xiaoliang, et al. Impedance modeling and controllers shaping effect analysis of PMSG wind turbines[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 9(2): 1465-1478.
[31] Radwan A A A, Mohamed Y A I. Stabilization of medium-frequency modes in isolated microgrids supplying direct online induction motor loads[J]. IEEE Transactions on Smart Grid, 2014, 5(1): 358- 370.
The Interaction Among Active Dampers in Multi-Inverter Grid-Connected System and Its Enhancement of Oscillation Suppression
Abstract In a multi-inverter grid-connected system, due to the inverters’ nonlinear characteristics and the weak grid characteristics, the dynamic interaction between the inverters and the grid poses a serious threat to system stability. Additionally, the system often faces power quality issues, including power-sharing mismatch caused by line impedance differences among inverters and potential voltage drop. Existing control methods struggle to achieve compatibility among controllers, which hinders their ability to address the three problems simultaneously.
This paper proposes an active damping-based control strategy to enhance power quality in a multi-inverter grid-connected system. The interaction between the active damper controllers is analyzed. The proposed strategy consists of three active controllers: damper K, virtual impedance Zv(s), and an adaptive voltage compensator. Based on the established dq small-signal model of the multi-inverter grid-connected system, the impact of the proposed strategy on system damping is investigated. The strategy can amplify the system damping by a factor of [1+KGi(s)/(Rf+Gi(s))], thereby enhancing robustness and improving the stability margin. By plotting the real/imaginary parts of the total inverter output impedance, the effectiveness of the proposed strategy in achieving power sharing is studied. The results demonstrate that the total output impedance can be reshaped. When the introduced virtual inductance Lv counteracts the line inductance Lx, the power decoupling condition can be satisfied. By increasing the introduced virtual resistance Rv, accurate power sharing can be achieved.
The co-action effect of the introduced active damper controllers on oscillation suppression is analyzed. It shows a synergistic interaction effect between the damper K and the virtual impedance Zv(s): As the damper K increases, the dynamic interactions in the mid-to-low frequency range are better suppressed. Still, adverse effects are introduced in the high-frequency range. Instability at high frequencies should be avoided when increasing the value of K at low and medium frequencies. The virtual impedance Zv(s) can eliminate the detrimental high-frequency impact caused by damper K and preserve the suppression performance in the mid-low frequency band. Virtual inductance (Lv) is introduced to mitigate dynamic interaction and enhance stability in the high-frequency range, while virtual resistance (Rv) is adjusted to improve stability at low frequencies. The coordinated operation of damper K and virtual impedance Zv(s) eliminates the risk of dynamic interaction across the entire frequency range, improving system stability.
A hardware-in-the-loop experimental platform is established. The experimental results demonstrate that under the proposed control strategy, the system remains stable under weak grid conditions. The output power difference among inverters is as low as 0.22%, with a 98.5% improvement in power-sharing accuracy. Additionally, the PCC voltage deviation is reduced from 10% to 1.3%, and the inverter output active power is significantly enhanced from 18 330 W to 95 370 W, representing a 420% improvement.The proposed active damping control strategy demonstrates excellent compatibility in terms of system stability improvement, accurate power sharing, voltage recovery, and output power enhancement.
keywords:Multi-inverter grid-connected system, dynamic interaction, power sharing, voltage drop, active control
中图分类号:TM464
DOI: 10.19595/j.cnki.1000-6753.tces.250624
国家自然科学基金(52107185)、广东省基础与应用基础研究基金(2023A1515010061)、广州市基础与应用基础研究基金(2024A04J4673)和电能高效高质转化全国重点实验室开放基金(2024KF008)资助项目。
收稿日期 2025-04-15
改稿日期 2025-06-13
杨 苓 女,1992年生,博士,副教授,硕士生导师,研究方向为并网逆变器的建模与稳定性分析。
E-mail: 1650148795@qq.com
罗坚强 男,1987年生,副教授,硕士生导师,研究方向为新能源电力系统稳定分析与控制。
E-mail: jqluo@gdut.edu.cn(通信作者)
(编辑 陈 诚)