图1 级联系统电路
Fig.1 Circuit of cascade system
摘要 直流配电系统含有大量的恒功率负载,其对外呈现负阻抗特性使系统受到扰动时容易发生振荡。该文首先以升压变换器级联系统为研究对象,分别对源测和负载侧进行阻抗建模并利用仿真扫频验证理论建模的准确性。其次,根据阻抗判据解释了级联系统的振荡原因,同时加入虚拟阻抗策略抑制系统振荡并从理论上证明了策略的有效性。然后,针对系统参数变化而引起的振荡频率变化问题分别提出基于跳点检测方法以及基于二阶广义积分器-锁频环(SOGI-FLL)的振荡频率检测方法,详细推导两种检测方法提频原理并给出算法参数设计原则。最后,在48~60 V/500 W的线缆-升压变压器的级联系统实验平台中验证了所提两种振荡频率检测方法分别对于频率提取的准确性,以及在前级线缆参数改变的情况下结合虚拟阻抗策略对于系统振荡抑制的有效性。
关键词:虚拟阻抗 振荡频率 自适应 跳点检测 二阶广义积分器-锁频环(SOGI-FLL)
直流配电系统由于其具有较好的电能质量、较强的灵活性、便于分布式电源接入等优点,在数据中心、船舶、通信等领域得到广泛应用[1-2]。同时由于直流配电系统含有大量的电力电子装置,导致其呈现低阻尼特性,同时由于大多数直流负载为恒功率负载,其对外呈现负阻抗特性,在受到外界扰动时容易失稳进而引起系统振荡[3-5]。
目前关于直流配电系统的稳定性研究主要是通过建立小信号模型来判断系统是否稳定。直流配电系统的稳定性分析方法主要分为状态空间平均法及阻抗法,由于阻抗法稳定判据形式较为明晰进而得到广泛应用[6]。R. D. Middlebrook等[7]在1976年首次提出了级联系统的阻抗判据用于判断系统的稳定性。此外,文献[8-9]提出了基于禁区的阻抗判据,其放宽了传统阻抗判据的约束条件,增大了系统设计的自由度;同时整体系统的稳定裕度规范可以根据禁区来定义,使阻抗判据的物理意义更加直观,更利于工程实践。Sun Jian[10]首次将阻抗判据应用于电网系统中,其将系统等效为电压-电流源级联系统。从理论上证明了若系统满足奈奎斯特判据,则并网系统能够稳定运行,而系统的稳定裕度和谐振频率可以用系统奈奎斯特图来测量。该判据也等效为绘制系统的伯德图,若两者存在交点且交点处相位差大于180°,则系统不稳定,也可依此来分析系统疑似振荡点并设计稳定裕度。该判据适用于所有的电压源与电流源级联型系统的端口稳定性判断。
直流系统振荡抑制策略目前主要有两类方案:无源方案和有源方案。对于无源方案,为了增大回路阻尼,在系统端口加入无源器件,典型的方法有RC并联、RL并联、RL串联阻尼器和RLC串联阻尼器四种[11]。该方案需要在电路中加入额外器件,不仅增加了系统损耗与成本,且会提升系统维护难度。有源方案则分为外加装置方法和虚拟阻抗策略。对于直流系统振荡问题目前已有学者提出了纹波消除器[12]、纹波能量存储器[13]、母线电压调节器[14]等概念。其基本思想大致相同,都是通过外加辅助电路滤除母线电压与电流的谐波分量,使系统稳定[15]。外加装置方案与直接采用无源阻尼的方法相比,有源阻尼电路中储能元件的电压电流可以随母线功率波动而大幅振荡,因此相同容量下可以存放的波动功率更高,母线稳定效果更强,同时可以完全消除对源侧与负载侧动态性能的影响。但由于加入了额外电路,该方案会进一步增加硬件成本,整体模块功率密度也会随之下降。而虚拟阻抗策略无需外加元件及装置,仅通过纯软件方法改变控制回路即可保证系统稳定。
虚拟阻抗策略根据其所加位置以及具体实现方式分为四类[16],其中负载侧并联虚拟阻抗(Load- Side Parallel Virtual Impedance, LSPVI)由于适用范围广、成本较低而得到了更为广泛的应用。其原理为采集输入电压,通过带通滤波器和阻抗系数前馈到控制环节的电压设定值中。其中带通滤波器的中心频率设定为系统的振荡频率,由此改变振荡频率点附近的负阻抗特性,使其满足端口稳定性条件,以实现振荡抑制的效果。是否可以获得系统准确的振荡频率是影响虚拟阻抗稳定效果的重要因素。
为了让虚拟阻抗策略能够适应不同场景,提出众多振荡频率检测算法。根据算法所提取的信息是频域信息还是时域信息,可分为频域法和时域法两类。频域法是通过傅里叶变换、滤波器滤波等方法,对信号进行频域分解,根据频域信息提取出系统潜在的振荡频率。在线阻抗测量的方法[17-19]是频域法中比较典型的方法,其通过在系统中人为注入小纹波,并利用电压电流传感器在线测量系统阻抗特性。该方法仅适用于系统外部架构和无源参数未知但不发生频繁改变的情况下的工况,一旦系统架构发生频繁变化,如数据中心机房的电源可能存在频繁热插拔的情况,则需要对系统多次进行在线阻抗测量,这不仅使得该策略较为繁琐,还会对系统的正常运行工况存在不利影响。利用快速傅里叶变换[20-21](Fast Fourier Transformation, FFT)算法来获取系统精确的振荡频率也是一种较为常见的自适应振荡频率测量方法。该方法能够精确地提取出系统发生振荡后的最大振荡分量及其频率,但其缺点在于需要实时调用FFT算法,算法运算量较大,占用的计算资源较多,对系统的处理器性能要求较高。利用二阶广义积分器-锁频环(Second-Order Generalized Integrator Frequency-Locked Loop, SOGI-FLL)提取系统振荡频率的方法在交流系统中也较为常见。有学者[22]采用SOGI-FLL对交流系统中的谐波进行提取,验证了其在谐波提取上的优越性。由于SOGI- FLL的应用不涉及三角函数,计算量相较于傅里叶变换等算法大大减小,因此得到了广泛应用。但鲜有学者将其用于直流系统的谐振频率检测。相比对时域波形提取频域信息的频域法,可以直接对时域波形提取时域信息进行处理,算法相对简单,易于设计。Zhang Xin等提出借助一个PI控制器自适应调节出频率选择环节的中心频率的方法[23],也有学者采用相同的思路,通过定步长调节法[16]试凑出系统的振荡频率。以上的方法均将系统模型视为黑箱,从试凑的角度调节出系统的振荡频率,实现起来较为简单。然而正是因为将系统视为黑箱,导致算法调节目标不清晰,且调节步长的选取需要根据实际工况权衡考虑,难以作为普适的算法应用于实际直流配电系统中。Zhang Xin等[23]直接通过检测时域波形相邻的峰值点和谷值点的幅值之比,从而快速判断系统是否失稳,并能够快速提取系统振荡频率,具有算法简单、计算量较小的优点。然而该方法假设系统振荡波形为理想单频正弦,实际中多为多频正弦振荡,因此这种方法仍存在一定局限性。
针对上述问题,本文提出了针对直流配电系统的两种振荡频率检测方法。首先,针对直流配电系统的等效级联系统进行阻抗建模,并根据阻抗判据对系统进行稳定性分析。其次,加入虚拟阻抗策略抑制端口振荡,并从理论上验证了其对于提升系统稳定性的有效性。然后,分别提出了基于跳点检测法和基于SOGI-FLL的振荡频率检测方法,与传统方案进行了对比并介绍了算法原理及相关参数设计。最后,将所提的两种振荡频率检测方法在48~60 V/500 W的线缆级联系统中进行验证,证明了所提两种算法对振荡频率的提取以及对系统振荡抑制的有效性和鲁棒性。
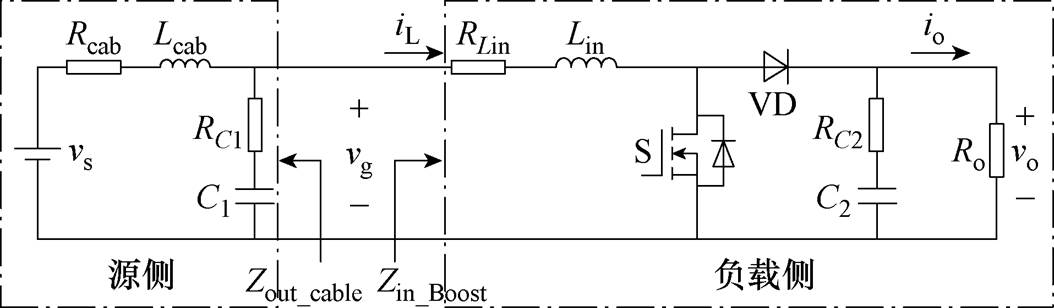
在数据中心、空间站及船舶供电系统等领域,为保证直流配电系统的高可靠性,直流母线电压由交流电网经不间断电源(Uninterrupted Power Supply, UPS)和蓄电池等不同类型的电源提供,故该情况下将直流母线简化为一稳定电压源,得到简单直流配电系统,为便于稳定性分析,母线引出的多条线缆间进行进一步解耦[25],解耦后的级联系统电路如图1所示。图1中,vs为直流电压源,Rcab、Lcab分别为变换器所带线缆的等效电阻与电感。后级为Boost变换器,C1为变换器的输入电容,RC1为其寄生电阻,在后续稳定性分析时将其划入源测。vg为变换器的输入电压,Lin为Boost的输入电感,RLin为电感的寄生电阻,S为MOSFET管,VD为二极管,C2为变换器的输出电容,RC2为其寄生电阻,Ro为变换器负载,vo为输出电压。
图1 级联系统电路
Fig.1 Circuit of cascade system
1.1.1 级联系统源侧小信号模型
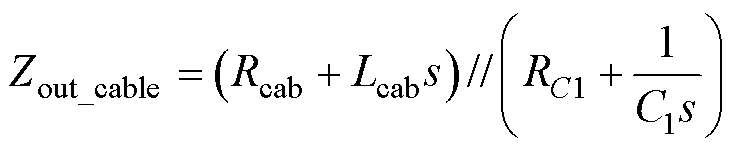
由图1可得,源测输出阻抗为
 (1)
(1)
1.1.2 级联系统负载侧小信号模型
本文仅研究负载和变换器之间发生的低频振荡,其振荡频率往往在1 kHz以下。而状态空间平均法[26]在开关频率一半以下的准确性可以得到保证,故选取该方法对Boost变换器进行开环建模,同时采用电压、电流双闭环的控制方式,因此可得系统的Boost闭环小信号模型,如图2所示。可得闭环输入导纳为
 (2)
(2)
式中,Til(s)、Tvl(s)分别为电流环、电压环环路增益,表示为
 (3)
(3)
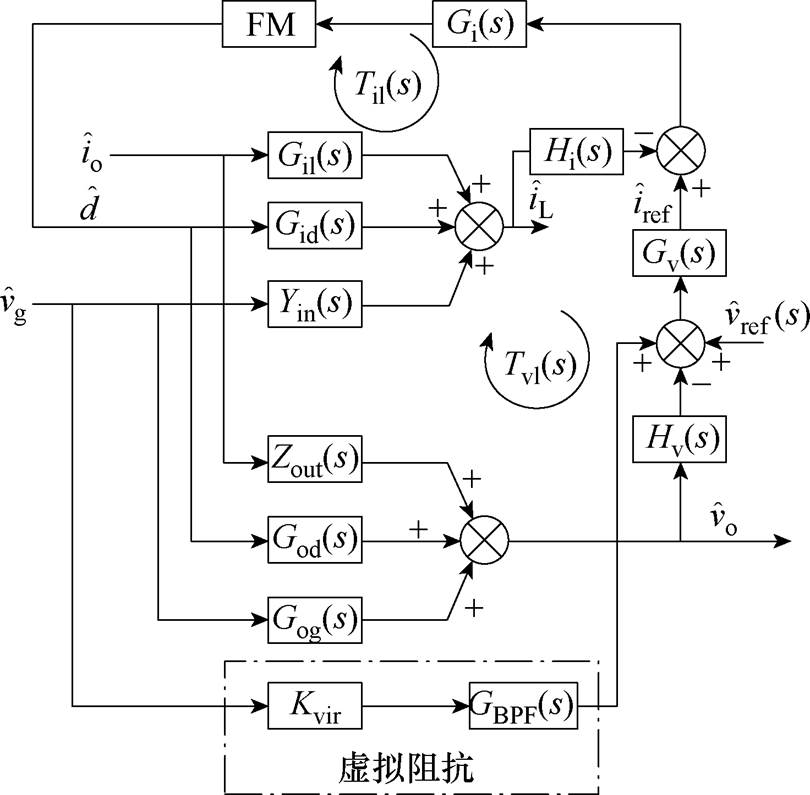
图2 Boost闭环小信号模型
Fig.2 Boost closed-loop small signal model
 (4)
(4)
图3给出了级联系统的端口阻抗伯德图。其中蓝线为采用双闭环控制的后级变换器的闭环输入阻抗曲线,红线为源侧输出阻抗曲线。由图3可知,结合阻抗判据,曲线存在两个交点:频率较高的交点处对应的两者相位差不超过180°,系统稳定;而频率较低的交点处两者的相位差超过180°,因此系统失稳。系统在低频段失稳的原因为级联系统在端口处的阻抗不匹配。
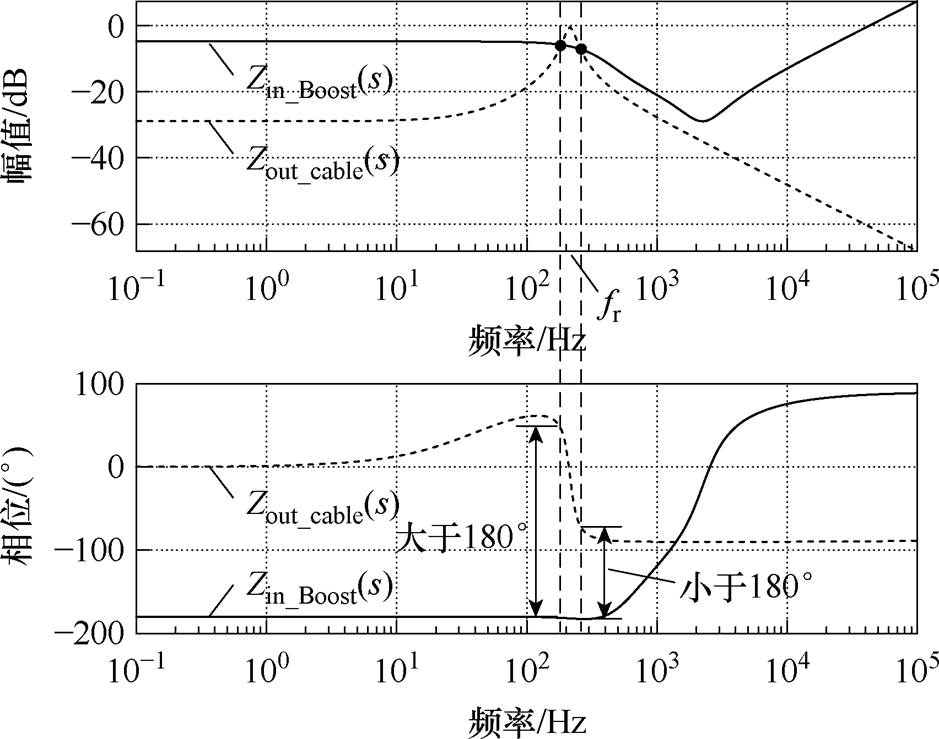
图3 级联系统的端口阻抗伯德图
Fig.3 Port impedance Bode plot of cascaded system
为了避免在振荡抑制过程中系统振荡频段的迁移现象,谐振抑制策略应该能够在一定范围内优化系统阻抗特性。
LSPVI策略具体实现方式为实时检测端口的输入电压,将电压信息经过频率选择环节处理后通过前馈路径整合至控制环路中。频率选择环节一般选取带通滤波器(Band-Pass Filter, BPF),BPF的中心频率wr一般和系统的振荡频率相近,由此在振荡频段附近对系统注入阻尼并抑制端口处的振荡。带通滤波器的表达式为
 (5)
(5)
结合上述Boost的建模结果,构建了LSPVI策略的小信号模型,如图2所示。Boost的闭环输入导纳修改为
 (6)
(6)
绘制加入LSPVI策略后的端口阻抗特性曲线,如图4所示。由图4可知,加入LSPVI后端口阻抗曲线交点频率处相位差为165°,小于180°满足稳定性判据,理论证明加入LSPVI后系统稳定。
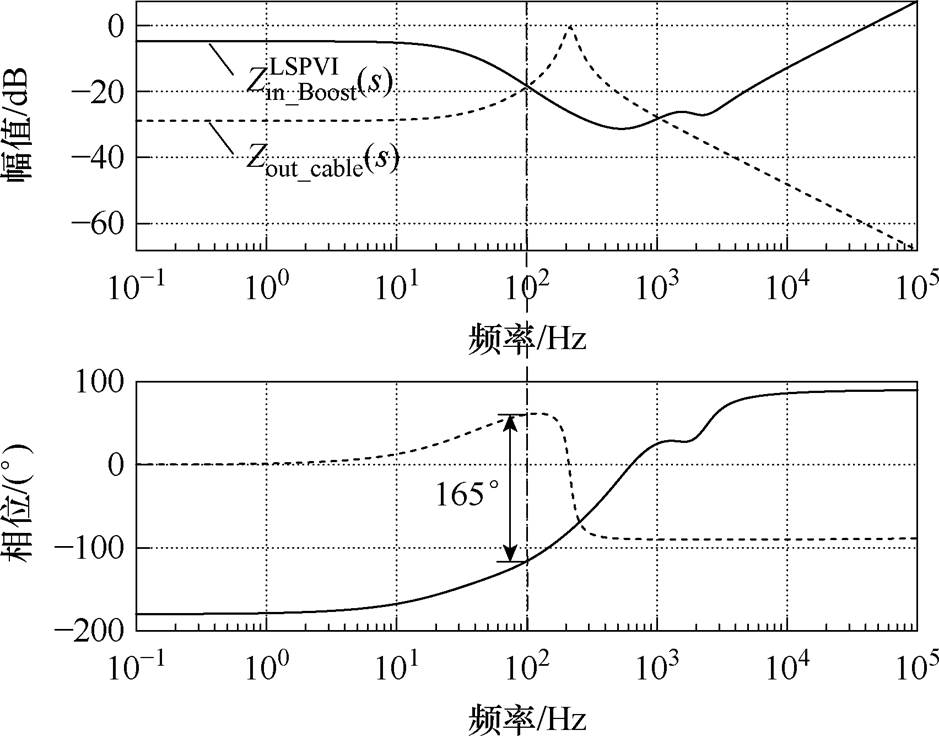
图4 LSPVI下级联系统端口阻抗伯德图
Fig.4 Port impedance Bode plot of cascaded system under LSPVI
虚拟阻抗策略的核心是获取系统潜在的振荡频率,并在系统潜在振荡频段附近改善系统稳定性。现有的策略均是在外部系统架构确定且无源参数已知,即系统振荡频率固定且已知的情况下设计的策略。然而实际数据中心的系统结构与无源参数随场景发生变化,如可能存在机柜内部电源频繁热插拔等情况,导致系统潜在的振荡频率变化范围较大,因此针对固定参数下设计的振荡抑制策略难以实施。为了使虚拟策略能够适应于不同场景,本文分别从时域和频域两方面对振荡频率检测方法进行研究。
传统的峰谷检测法[23]是通过在一定时间段内进行波峰波谷点的识别记录,进而判断系统是否失稳,再进行振荡频率的计算。传统峰谷检测算法原理如图5所示,该算法通过采集系统母线电压的波形来检测系统是否发生振荡,并假设系统的振荡信号为纯净的单一正弦波。首先需要选择一个时间窗口来存储某个时刻监测信号的历史数据点,窗口大小由采样频率和假设的最小振荡频率确定。在此基础上找到该窗口内所有局部极值点vx(k)。当检测到存在极值点的幅值超过系统振荡阈值Vth时,认为系统可能存在失稳趋势,并开始计算相邻3个极值点之间差值的比率Mk,以此判断电压是否发生了发散振荡。Mk的计算公式为
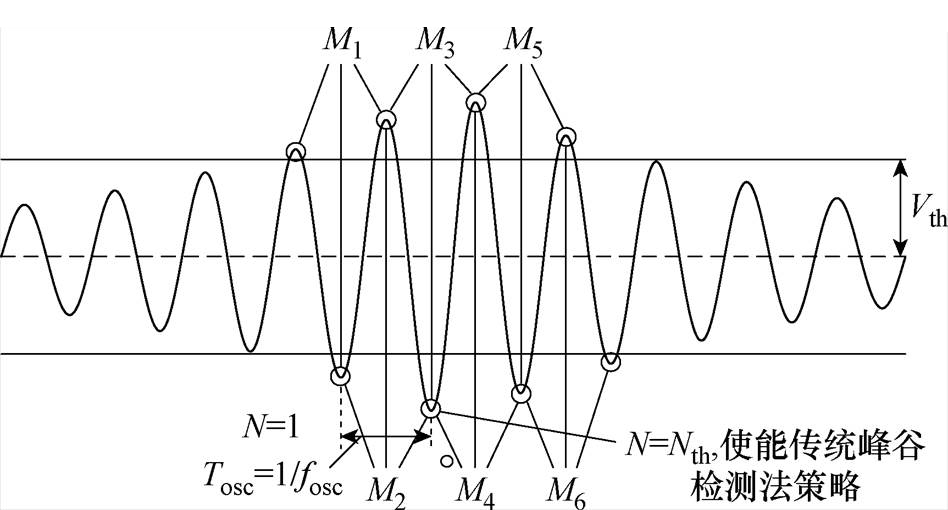
图5 传统峰谷检测法算法原理
Fig.5 Algorithm principle of traditional peak valley detection method
 (7)
(7)
式中,vx(k)、vx(k-1)和vx(k-2)为电压信号最近的3个局部极值。当Mk>1时,认为系统有失稳趋势。然而实际系统中存在噪声的干扰,因此设定N为失稳次数阈值,当Mk>1的次数达到失稳次数阈值N时,认为系统失稳,并发生了发散振荡。此时可以根据相邻的波峰点或波谷点的时间距离Tosc来计算出系统的振荡频率fosc,计算公式为
 (8)
(8)
计算出振荡频率后,将该频率传递给虚拟阻抗策略,并将其使能,最终使得系统稳定。
但实际系统振荡情况较为复杂,根据振荡频段可分为单频、多频振荡;根据振荡幅值又可分为等幅、收敛、发散振荡。上述传统的峰谷检测法只能针对单频振荡中的发散振荡起效,适用范围较窄,且并不适用于实际系统。因此,有必要对传统的峰谷检测法进行改进,使其与实际振荡情况相匹配并能够适应更多的应用场景。
2.2.1 算法原理
所提跳点检测法的原理如图6所示。该算法通过采集系统母线电压的纹波波形来检测是否发生振荡,因此需要先进行滤波处理。首先选择一个时间窗口来存储某个时刻监测信号的历史数据点,窗口大小由采样频率和假设的最小振荡频率确定,并在此基础上找到该窗口内所有局部极值点(Extreme- value Point, EP)vx(k)。对于多频振荡,由于EP并不一定是系统的最大值或最小值点,因此传统的峰谷检测法会失效。
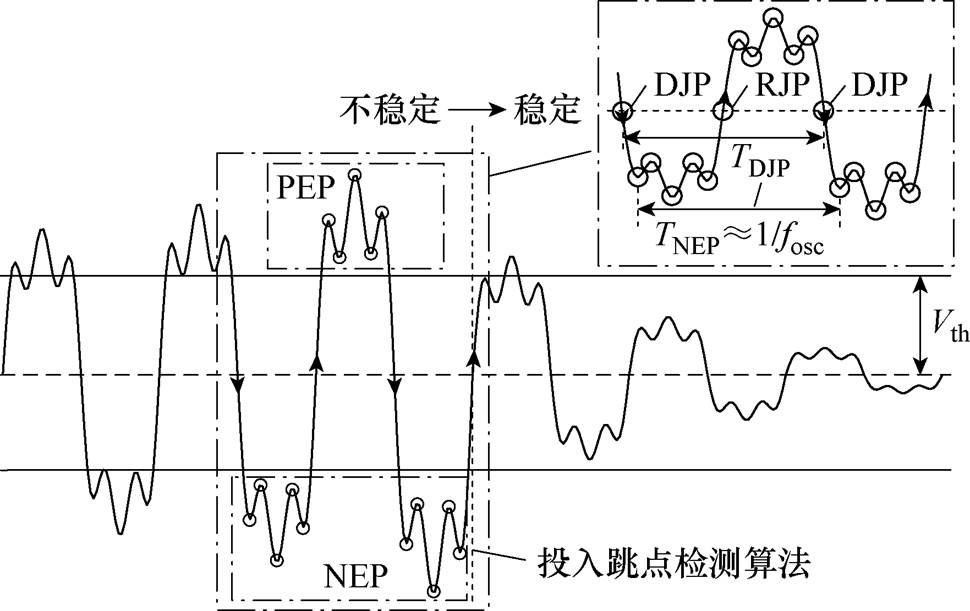
图6 跳点检测算法原理
Fig.6 Principle of jump point detection algorithm
由图6可知,波形由负值的极值点(Negative Extreme-value Point, NEP)转变为正值的极值点(Positive Extreme-value Point, PEP)时,波形此时存在一个过零点(Zero-Crossing Point, ZCP),定义此时的ZCP为上跳点(Rising Jump Point, RJP);同样地,波形由PEP转变为NEP时,波形此时同样存在一个ZCP,定义此时的ZCP为下跳点(Descending Jump Point, DJP)。因此可以通过转而检测相邻的RJP或DJP来计算系统的振荡频率。本算法选取相邻的DJP进行振荡频率的计算。
当检测到存在极值点的幅值超过系统振荡阈值Vth时,认为系统可能存在失稳趋势,当连续N次大于所设定阈值时,则判定系统失稳,并开始提取系统的振荡频率。由于DJP是算法虚构出来的,实际上在电压极值点序列的存储空间中并不存在,因此需要经过转换来等价计算。由图6可知,相邻的DJP之间的时间距离可近似等效为相邻半波的NEP之间的距离,因此可以通过相邻半波的NEP之间的时间距离来计算系统的振荡频率。计算公式为
 (9)
(9)
式中,TDJP和TNEP为相邻下跳点和上跳点时间间隔。
该算法在一定时间段内进行系统振荡极值点幅值的识别记录,进而判断系统是否失稳,再进行振荡频率的计算。改进后的方法相比传统的方法适用性更广,更易于工程应用。
利用跳点检测法改善虚拟阻抗策略的自适应振荡抑制策略框图如图7所示。算法可分为两大部分:基于跳点检测法的振荡频率检测算法和虚拟阻抗策略。
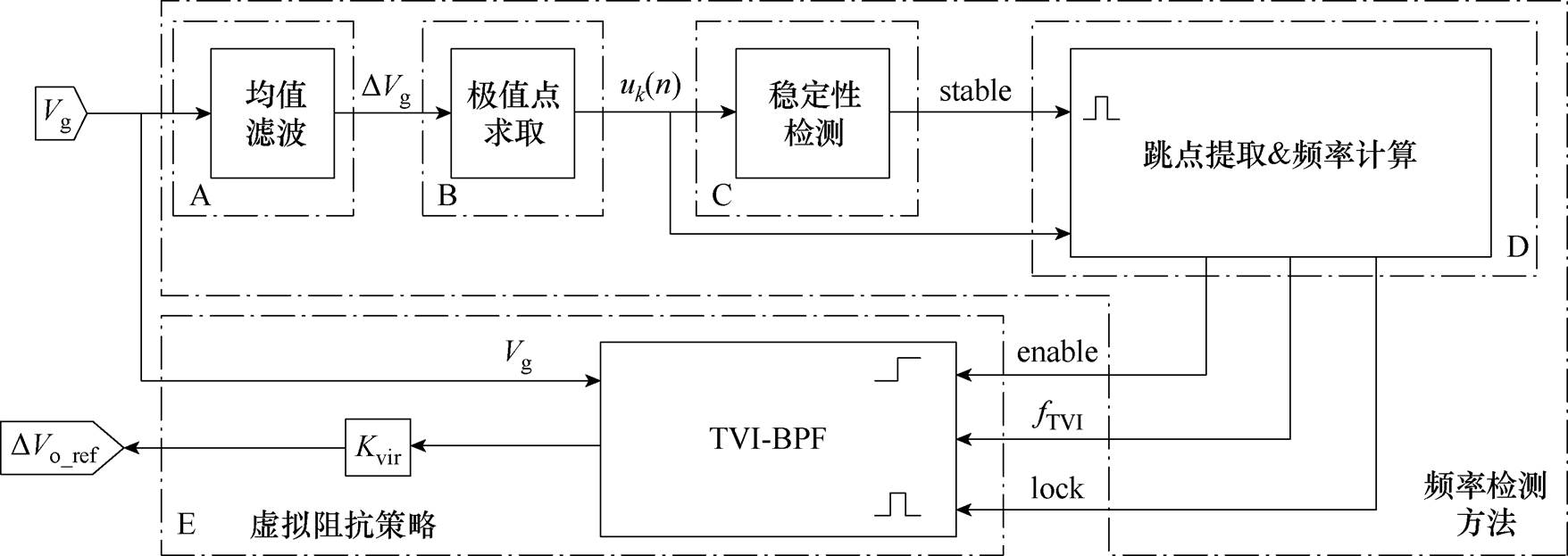
图7 基于跳点检测法的自适应振荡抑制策略框图
Fig.7 Block diagram of adaptive oscillation suppression strategy based on jump point detection method
算法首先采集输入电压Vg,并经过信号处理模块A对信号进行均值滤波,获取信号的交流分量;B为极值点求取模块,实时检测输入纹波,提取出滑动窗口内的极值点及其对应的时间;C模块中利用预先设定的计数器对系统进行稳定性判断,结果分为两种情况:
(1)当跳点检测算法的失稳阈值为Vth,检测到系统纹波极值点幅值小于阈值时,认为系统稳定,此时不投入频率检测策略及虚拟阻抗策略,并继续进行稳定性检测。
(2)当连续N次检测到系统纹波极值点幅值超过阈值时,认为系统失稳,使能频率计算模块D;当D模块中频率计算完成时,更新虚拟阻抗策略模块E中带通滤波器的中心频率,并使能策略来抑制系统振荡。
2.2.2 算法设计
跳点检测算法中需要设计的量有滑动窗的大小w、采样频率fsample。
首先需要确定系统振荡频段。实际现场线缆等效长度一般不超过300 m,本文采用线缆的等效电感为3.3 mH/m。绘制不同长度线缆下前级输出阻抗伯德图如图8所示。
可以发现,系统的LC谐振频率始终在100~1 000 Hz。然而仅简单的通过LC谐振频率来判定系统的振荡频率往往不够精确,可绘制系统的端口阻抗特性曲线来确定系统的振荡频率,如图9所示。
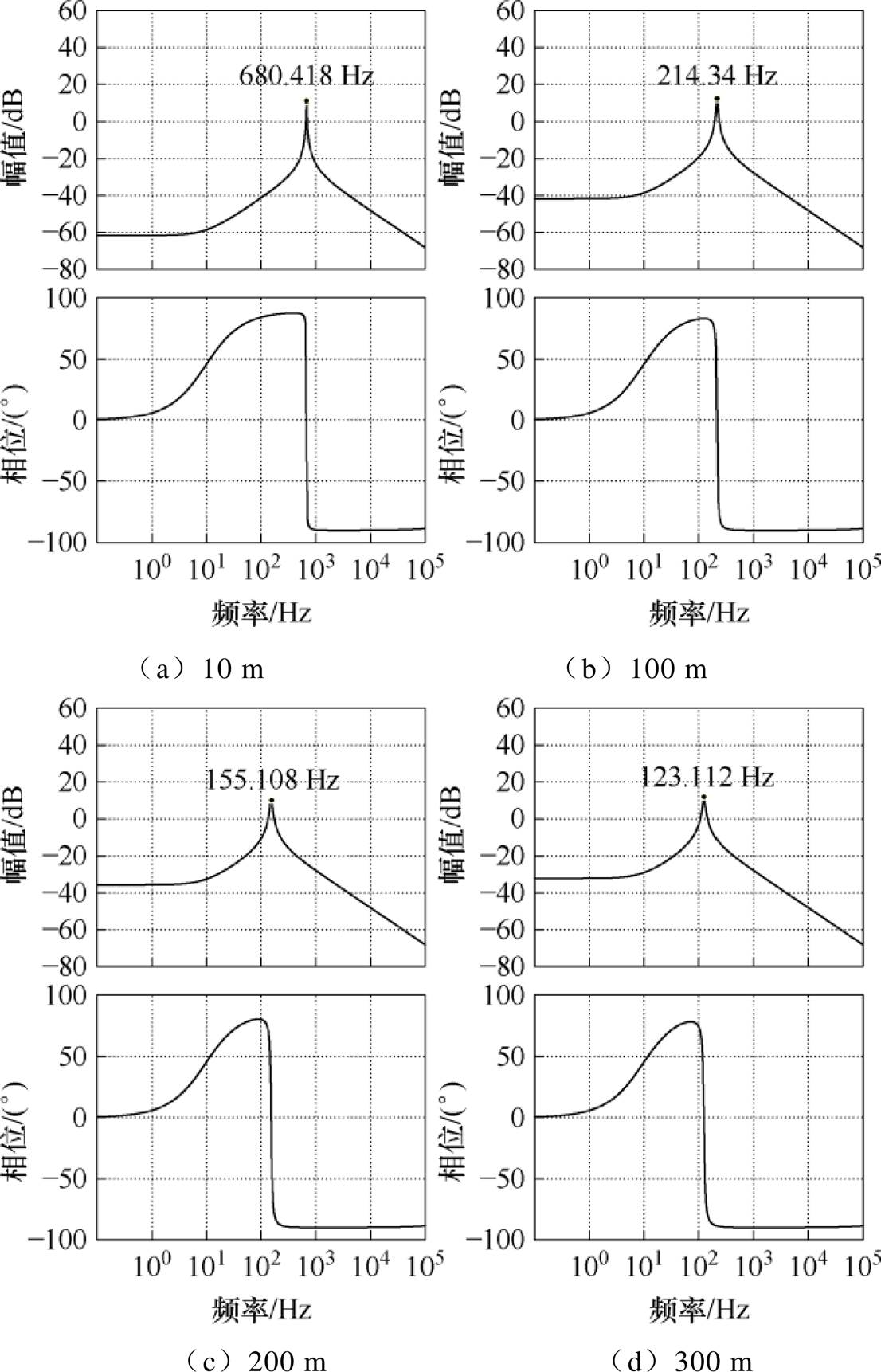
图8 不同长度线缆下前级输出阻抗伯德图
Fig.8 Bode plots of front-end output impedance for cables of different lengths
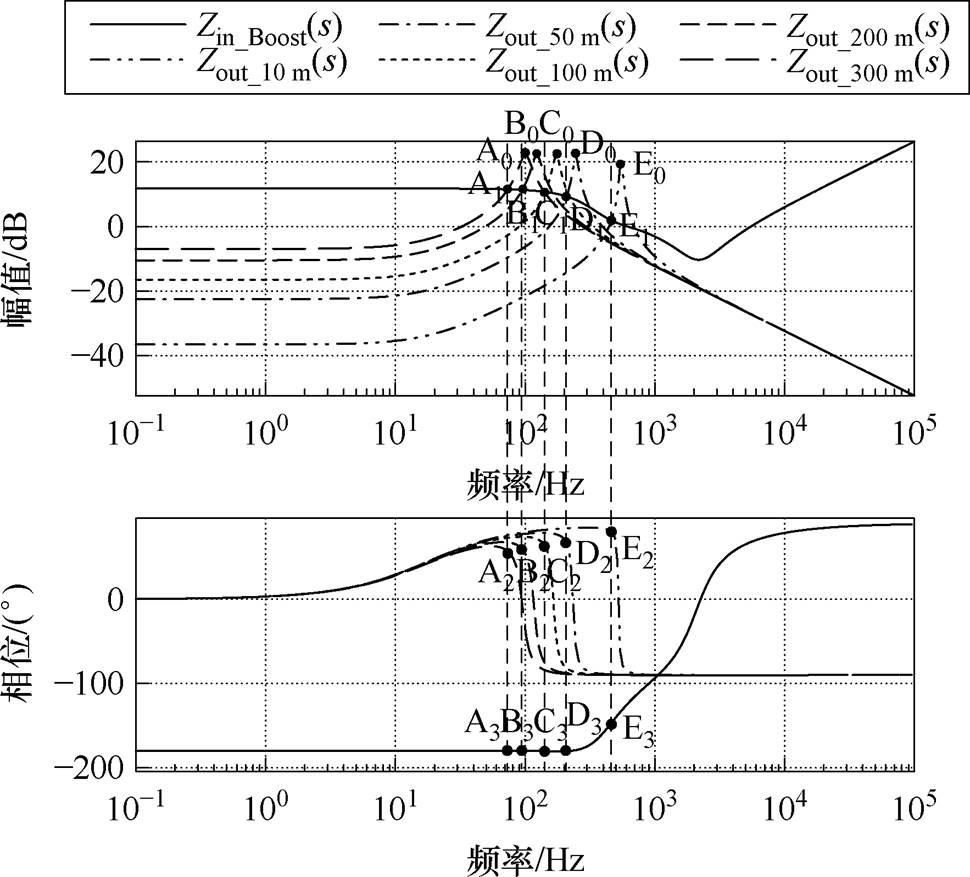
图9 不同长度线缆下系统端口阻抗伯德图
Fig.9 Bode plot of system port impedance under cables of different lengths
Zin_Boost(s)为不带谐振抑制策略时系统后级闭环输入阻抗,通过改变前级所带线缆的长度,可以分别绘制出在线缆长度为10、50、100、200、300 m下的前级输出阻抗Zout_10 m(s)、Zout_50 m(s)、Zout_100 m(s)、Zout_200 m(s)、Zout_300 m(s)曲线,其谐振峰对应的频点分别为A0、B0、C0、D0、E0。不同长度下的前级输出阻抗曲线分别与Zin_Boost(s)的幅频曲线交于频点A1、B1、C1、D1、E1,交点下对应相频曲线的相位差为线段A2A3、B2B3、C2C3、D2D3、E2E3。理论稳定性判定结果见表1。表1中,X=A、B、C、D、E。
表1 不同长度线缆下系统端口稳定性理论分析结果
Tab.1 Theoretical analysis results of system port stability under cables of different lengths
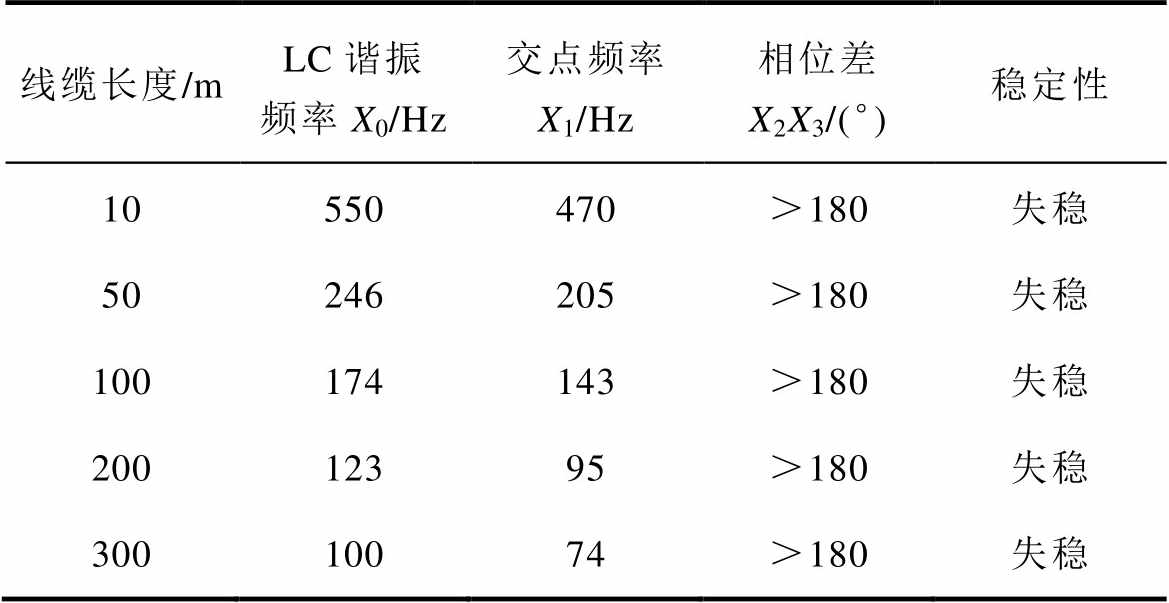
线缆长度/mLC谐振频率X0/Hz交点频率X1/Hz相位差X2X3/(°)稳定性 10550470>180失稳 50246205>180失稳 100174143>180失稳 20012395>180失稳 30010074>180失稳
可以发现,理论分析的振荡频率与不同线缆下的LC振荡频率存在一定差异,且在不同长度线缆下系统均失稳,由端口阻抗判据可知,系统振荡频率为阻抗曲线的交点频率,其范围为[74, 470] Hz。因此,为了留有一定裕度,可认为系统的振荡频率在[50, 1 000] Hz之间。
系统滑动窗的大小需要保证至少采集够周期最长即频率最小的一个周期,同时为了减小干扰,需要至少采集1.5个周波,即可确定系统的滑动窗大小w=30 ms。系统潜在的最高振荡频率为1 kHz,由奈奎斯特采样定理可知,跳点检测算法的采样频率至少为2 kHz。留有一定裕度的情况下采样频率fsample可以设定为6 kHz。
SOGI-FLL的经典结构框图[27]如图10所示,其能够自适应地将内部频率 与输入端口信号v中的主频信号保持一致。利用这一特性,可将端口处振荡的电压纹波量作为输入信号,对其主频进行提取。下面分模块对SOGI-FLL的功能进行分析,并假设滤波算法较为理想,即SOGI的输入信号近似于单频正弦分量。实际上,系统发生振荡后未进入饱和控制区前,系统的振荡波形仍接近正弦,因此该假设是合理的。
与输入端口信号v中的主频信号保持一致。利用这一特性,可将端口处振荡的电压纹波量作为输入信号,对其主频进行提取。下面分模块对SOGI-FLL的功能进行分析,并假设滤波算法较为理想,即SOGI的输入信号近似于单频正弦分量。实际上,系统发生振荡后未进入饱和控制区前,系统的振荡波形仍接近正弦,因此该假设是合理的。
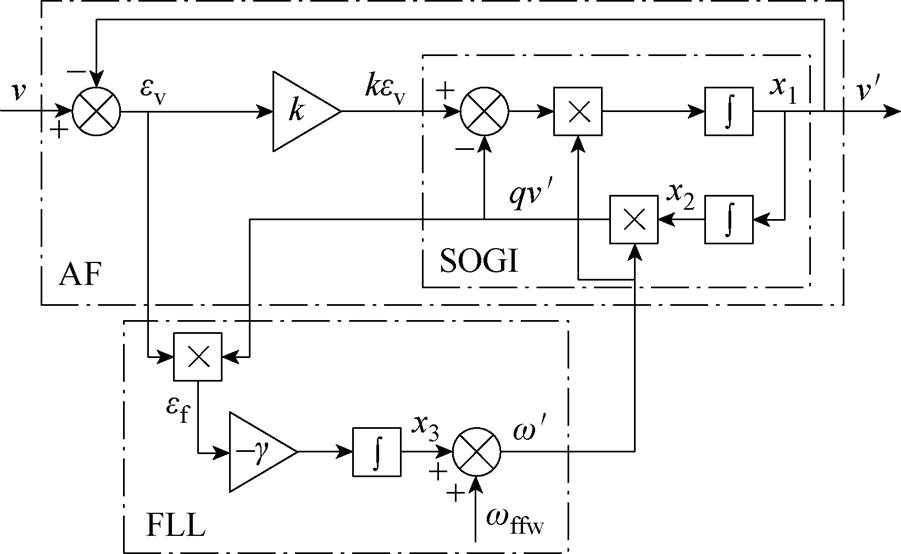
图10 SOGI-FLL结构框图
Fig.10 The SOGI-FLL structure diagram
SOGI可以理解为一个双输入双输出系统,其中输入量为输入信号v、信号的频率;输出量为输入信号的正交分解量,包括同相量 以及正交量
以及正交量 。
。
定义SOGI的同相量传递函数Gd(s)为同相量与输入信号之比,可得
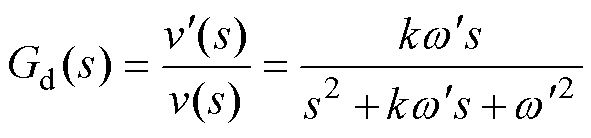 (10)
(10)
式中,k为增益系数。定义SOGI的正交量传递函数Gq(s)为正交量与输入信号之比,可得
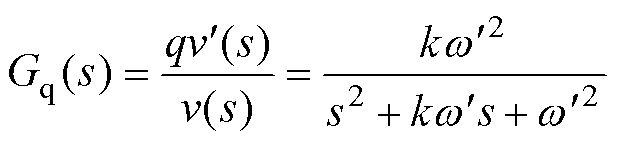 (11)
(11)
当输入信号频率为100 Hz,即角频率为 ,增益系数k=
,增益系数k= 时,绘制Gd(s)、Gq(s)的伯德图如图11所示。对于同相量传递函数Gd(s),其表征为带通滤波器的特性,中心频率为SOGI内部频率,且在中心频率处幅值为0 dB,相位为0°,表明当输入信号频率恰好落在中心频率处时,通过SOGI后,输出信号在幅值以及相位上均无变化。而当输入信号频率不位于中心频率处时,输出信号幅值均会被衰减,相位产生超前或者滞后。
时,绘制Gd(s)、Gq(s)的伯德图如图11所示。对于同相量传递函数Gd(s),其表征为带通滤波器的特性,中心频率为SOGI内部频率,且在中心频率处幅值为0 dB,相位为0°,表明当输入信号频率恰好落在中心频率处时,通过SOGI后,输出信号在幅值以及相位上均无变化。而当输入信号频率不位于中心频率处时,输出信号幅值均会被衰减,相位产生超前或者滞后。
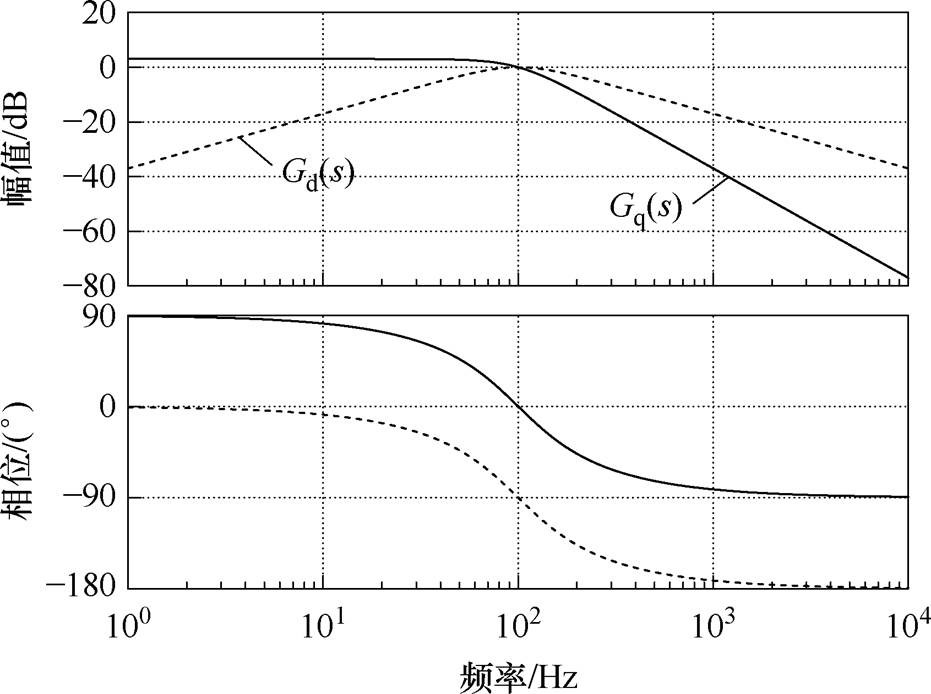
图11 增益系数为 时Gd(s)、Gq(s)的Bode图
时Gd(s)、Gq(s)的Bode图
Fig.11 Bode plot of Gd(s) and Gq(s) with a gain coefficient of
对于正交量传递函数Gq(s),其表征为低通滤波器的特性,截止频率为SOGI内部频率,且在截止频率处幅值为0 dB,相位为-90°,表明当输入信号频率恰好落在中心频率处时,通过SOGI后正交量与输入信号v幅值相同但相位滞后90°。而当输入信号频率不位于截止频率处时,输入信号的高频分量幅值会被衰减,相位随着频率的增加而滞后的越来越严重。
通过以上分析可知,SOGI等价地构造出了带通滤波器叠加低通滤波器的结构。此外,低通滤波器的输出始终保持滞后于带通滤波器的输出90°。结合以上特性,可在SOGI的基础上添加锁频环(Frequency-Locked Loop, FLL),从而构造出自适应陷波器的结构,自动提取出输入信号的频率。
FLL为三输入单输出系统,其输入信号分别为SOGI的输入信号与同相量信号的误差 、正交量、频率初始设定值
、正交量、频率初始设定值 ,输出量作为SOGI的内部频率
,输出量作为SOGI的内部频率 。误差与正交量相乘后得到误差因子
。误差与正交量相乘后得到误差因子 ,通过反相放缩后叠加在频率初始值上作为SOGI内部频率。
,通过反相放缩后叠加在频率初始值上作为SOGI内部频率。
定义误差 相对于输入信号v的传递函数为偏差传递函数Ge(s),可得
相对于输入信号v的传递函数为偏差传递函数Ge(s),可得
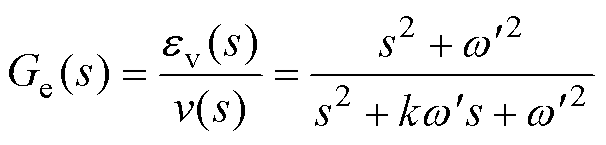 (12)
(12)
为了分析加入FLL后系统的锁频特性,下面对正交量传递函数Gq(s)、偏差传递函数Ge(s)进行对比分析,如图12所示。
由图12可知,当输入信号的频率小于SOGI内部频率时,正交量传递函数Gq(s)、偏差传递函数Ge(s)具有相同的相位,两者乘积同号;而当频率大于内部频率时,具有相反的相位,两者乘积异号。只有当输入信号频率恰好等于内部频率时,两者乘积归零。
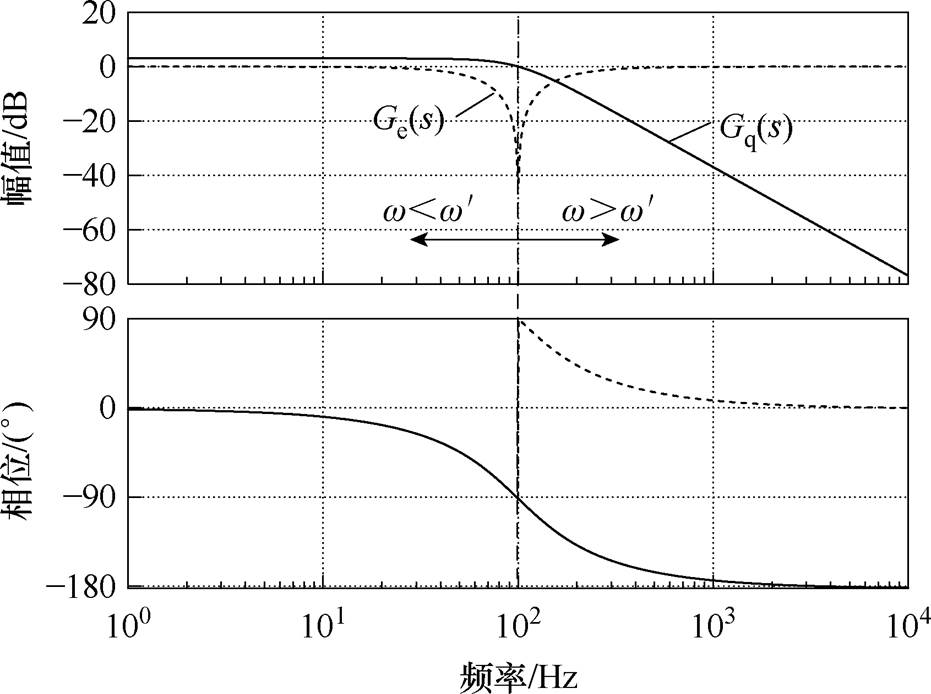
图12 偏差传递函数Ge(s)与正交量传递函数Gq(s)的对比
Fig.12 Comparison of deviation transfer function Ge(s) and orthogonal transfer function Gq(s)
根据上述分析,当输入信号的频率小于SOGI内部频率时,误差因子大于零,反相放缩后叠加至SOGI内部频率上,SOGI内部频率有减小的趋势;当输入信号的频率大于SOGI内部频率时,误差因子小于零,反相放缩后叠加至SOGI内部频率上,SOGI内部频率有增大的趋势。因此,便可最终将SOGI内部频率自动锁定至输入信号频率。同时SOGI-FLL在输入信号含有直流量时容易失稳,因此需要对输入直流信号进行均值滤波处理。
利用SOGI-FLL法改善虚拟阻抗策略的原理可分为两大部分如图13所示,分别为基于SOGI-FLL的振荡频率检测算法和虚拟阻抗策略。振荡频率检测算法首先采集输入电压Vg,并经过信号处理模块A对信号进行均值滤波;B为SOGI-FLL频率提取模块,实时检测SOGI输入波形,提取出主成分频率、振荡幅值;C模块中利用计数器对系统进行稳定性判断,分为两种情况:
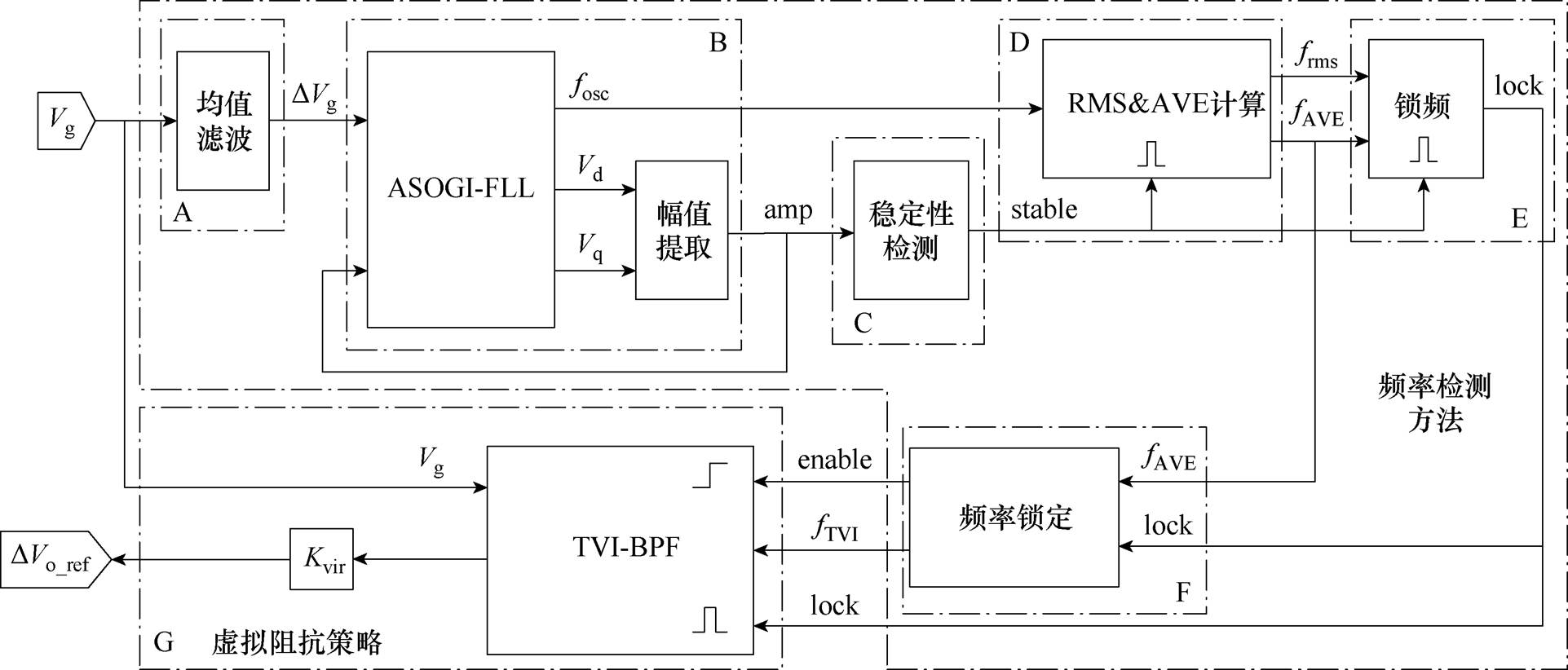
图13 基于SOGI-FLL的自适应振荡抑制策略框图
Fig.13 Block diagram of adaptive oscillation suppression strategy based on SOGI-FLL
(1)当B模块所提取的纹波幅值Vamp小于失稳阈值Vth时,认为系统稳定,下一周期返回A模块继续判断系统稳定性。
(2)当B模块所提取的纹波幅值Vamp连续N个计算周期大于失稳阈值Vth时,认为系统失稳,同时使能RMS&AVE计算模块D、锁频模块E,输出锁频信号;模块F接受到模块E的锁频信号后,会更新当前带通滤波器的中心频率并使能虚拟阻抗策略抑制系统的振荡。
式(13)、式(14)为SOGI-FLL的状态空间方程[28]。
 (13)
(13)
 (14)
(14)
式中,x为SOGI的状态向量;代表系统积分器的输出量;y为输出向量。
式(15)为FLL的状态方程。
 (15)
(15)
式中, 为FLL的增益系数。
为FLL的增益系数。
考虑到系统的稳定运行条件为w= 以及= 0,可以将式(13)写为
以及= 0,可以将式(13)写为
 (16)
(16)
式中,“-”表示稳定运行。可以从式(16)获得系统的雅可比矩阵,其特征值的实部为零,因此从理论上证明了系统临界稳定,且稳态响应会以频率进行振荡。因此,设输入信号为
 (17)
(17)
式中,V为电压纹波幅值; 为纹波电压初始相位。可得输出向量为
为纹波电压初始相位。可得输出向量为
 (18)
(18)
则输入信号幅值Vden为
 (19)
(19)
1)增益系数k
SOGI的响应调节时间 可以近似[28]为
可以近似[28]为
 (20)
(20)
当输入信号频率固定50 Hz不变,信号幅值从30 V变化至5 V时,即输入信号的幅值发生阶跃时,具有不同k值的SOGI的时间响应如图14所示。k值越高,SOGI的响应越快。然而,增益k也会影响SOGI的带宽,k值较高会降低SOGI在输入有谐波时的抗扰度;另一方面,k值较低会引起SOGI长时间的无衰减暂态响应。因此综合考虑选取k= 较为合适,即设计SOGI的调节时间为22.5 ms,满足自适应算法的允许响应时间。
较为合适,即设计SOGI的调节时间为22.5 ms,满足自适应算法的允许响应时间。
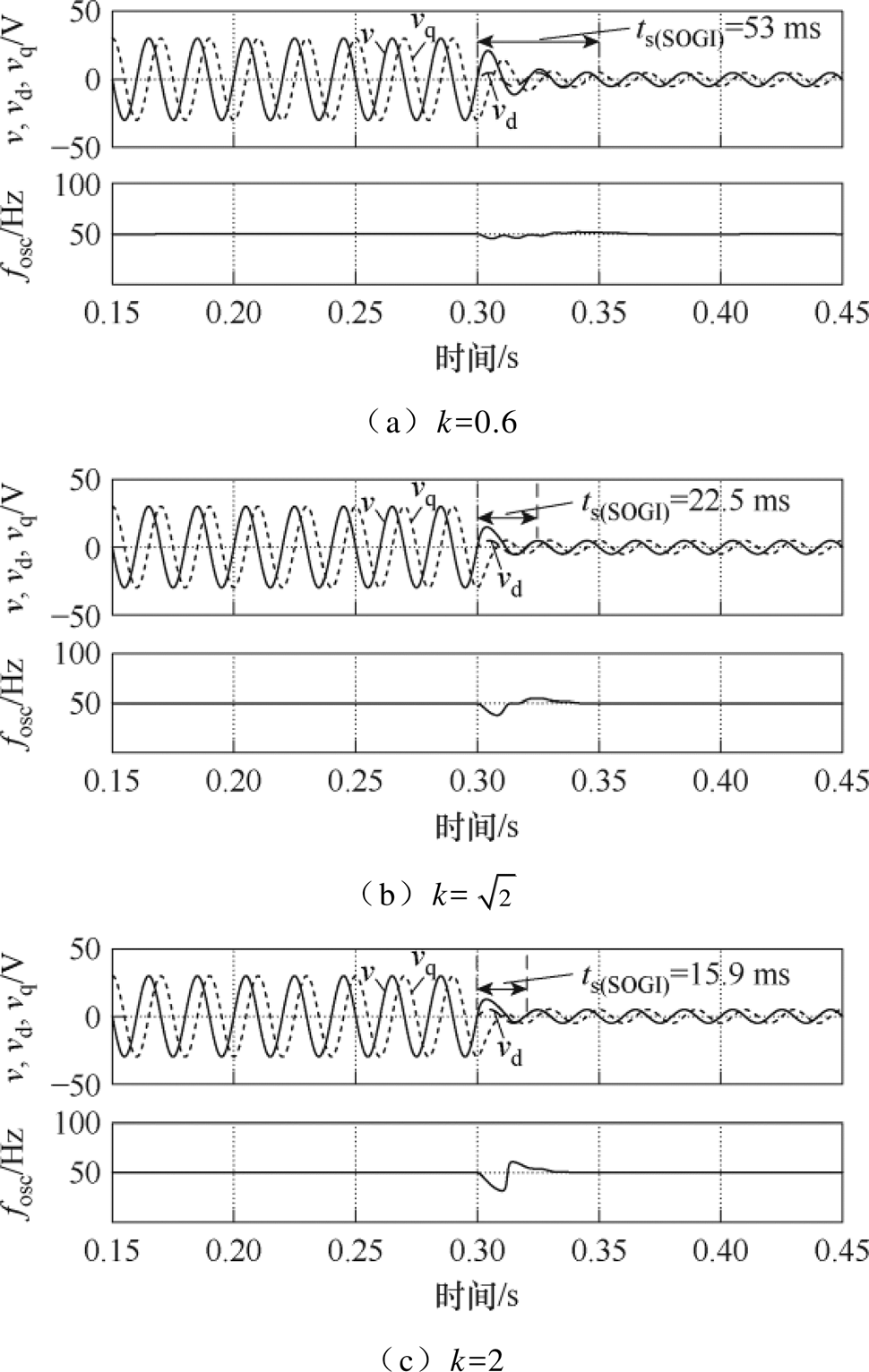
图14 幅值阶跃时SOGI的时域响应波形
Fig.14 Time domain response waveforms of SOGI with amplitude step
2)增益系数g
线性控制分析技术不能直接用于确定FLL增益g的值,因为频率自适应环路是高度非线性的。因此作出一些合理的假设来确定FLL的性能。图15显示了基于反馈的线性化前馈环路的一个实际实现方式。
调节时间完全依赖于设计参数 ,并且可以用式(21)来近似[28]。
,并且可以用式(21)来近似[28]。
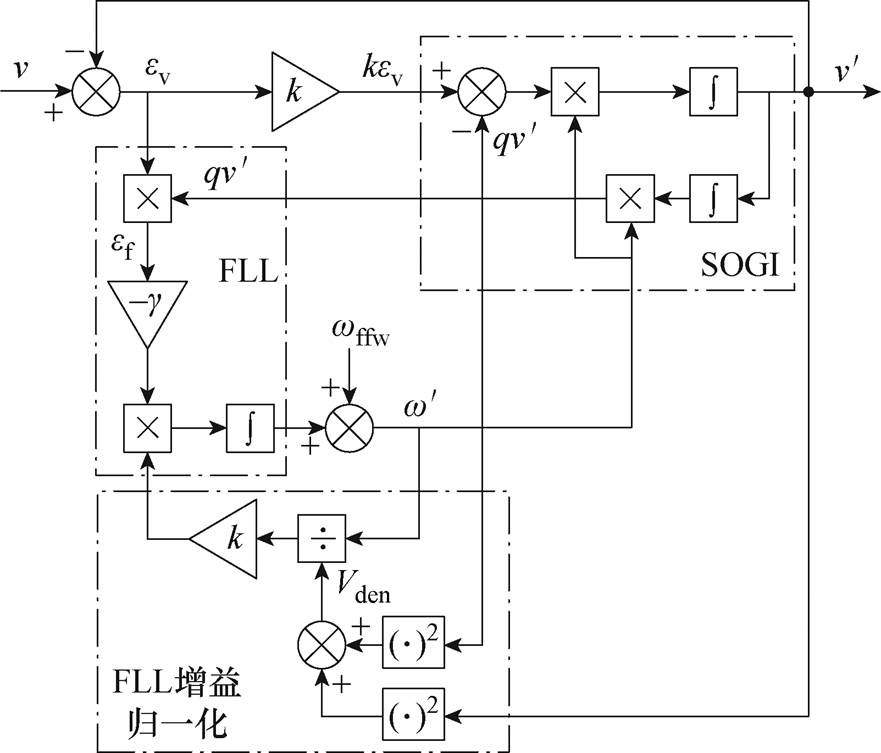
图15 增益系数g归一化处理后的SOGI-FLL控制框图
Fig.15 Control block diagram of SOGI-FLL after normalization of gain coefficient g
 (21)
(21)
在该系统中,通过反馈估计输入电压的幅值和频率来在线调整增益系数g,从而保证了FLL频率锁定的调节时间固定。同时,在系统输入电压幅值降至零的情况下,图15中的FLL增益归一化模块的输出被限制为最大值。
通过上述分析可知,增益系数g的设计通过归一化后,转化为增益系数的设计。下面给出了当输入信号的频率从50 Hz变化至200 Hz时,具有k=和不同值的SOGI-FLL的时间响应仿真波形,如图16所示。
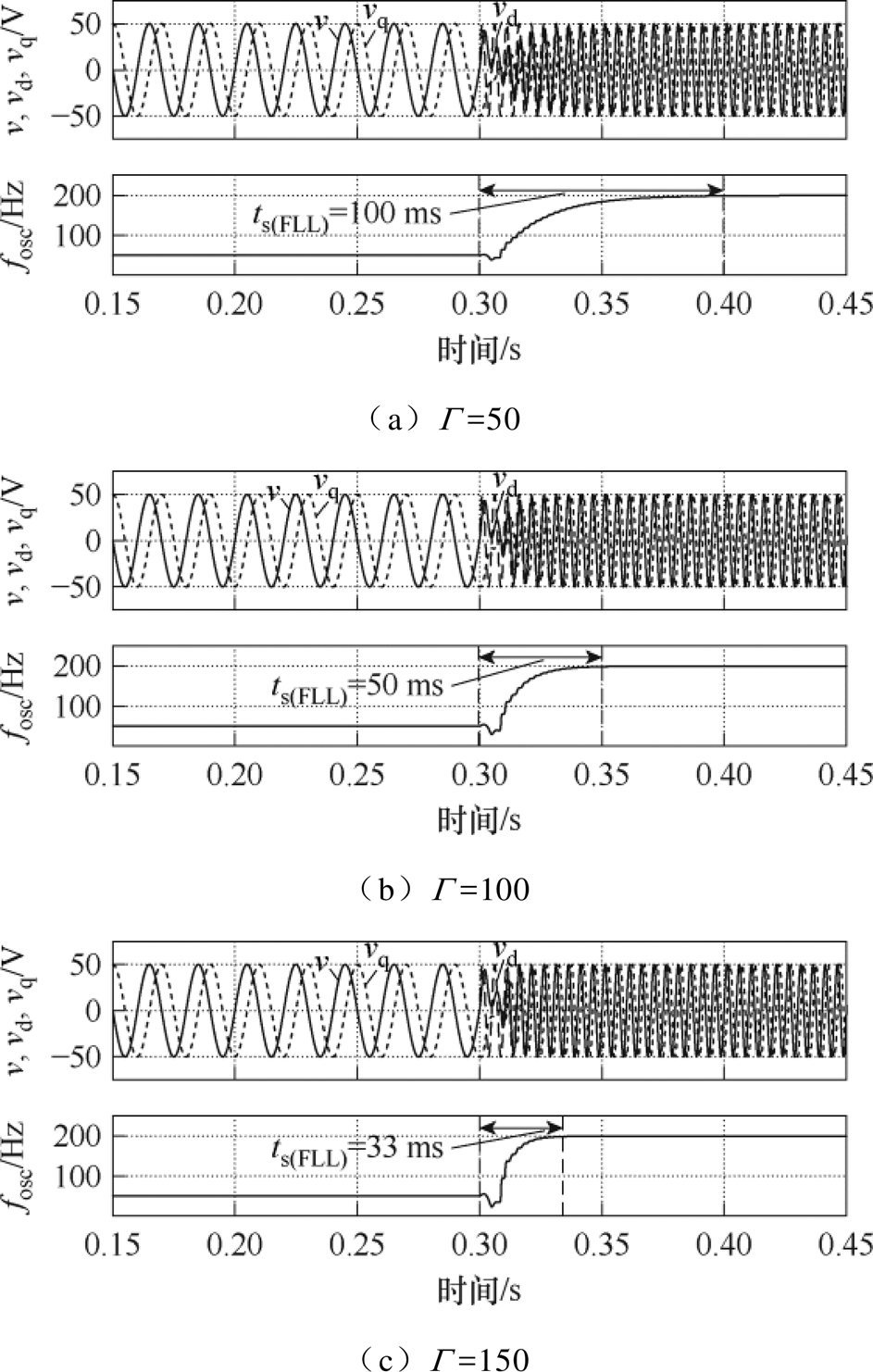
图16 频率阶跃(50~200 Hz)时SOGI-FLL的时域响应波形
Fig.16 Time domain response waveforms of SOGI-FLL with frequency step (50 Hz to 200 Hz)
由图16可得,越大越有利于加快FLL的动态调节时间。然而过大会对系统的超调带来不利影响,同时会使得系统对噪声更加敏感。因此综合考虑,选取100较为合适,即设计FLL的调节时间为50 ms,满足自适应算法的允许响应时间。
为验证所提策略及参数设计的合理性,本文搭建48~60 V/500 W的级联系统实验平台如图17所示。级联系统实验平台参数见表2。
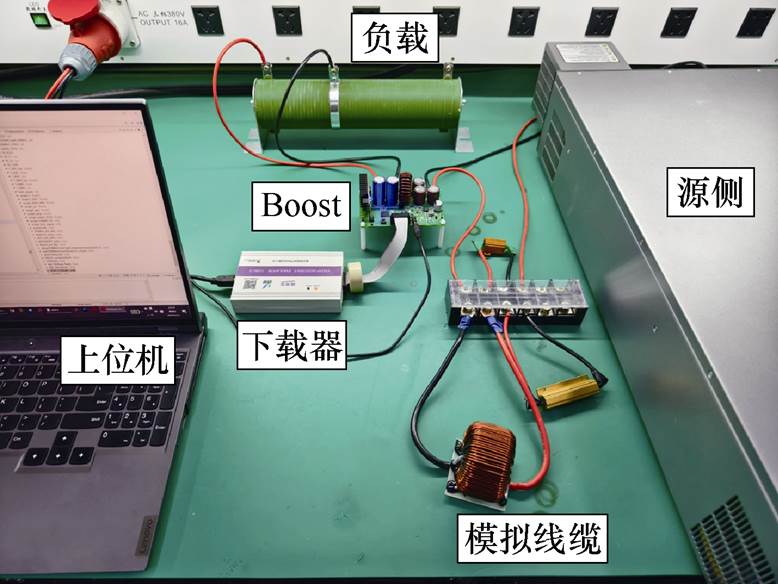
图17 实验平台
Fig.17 Experiment platform
表2 实验平台参数
Tab.2 Experimental platform parameters
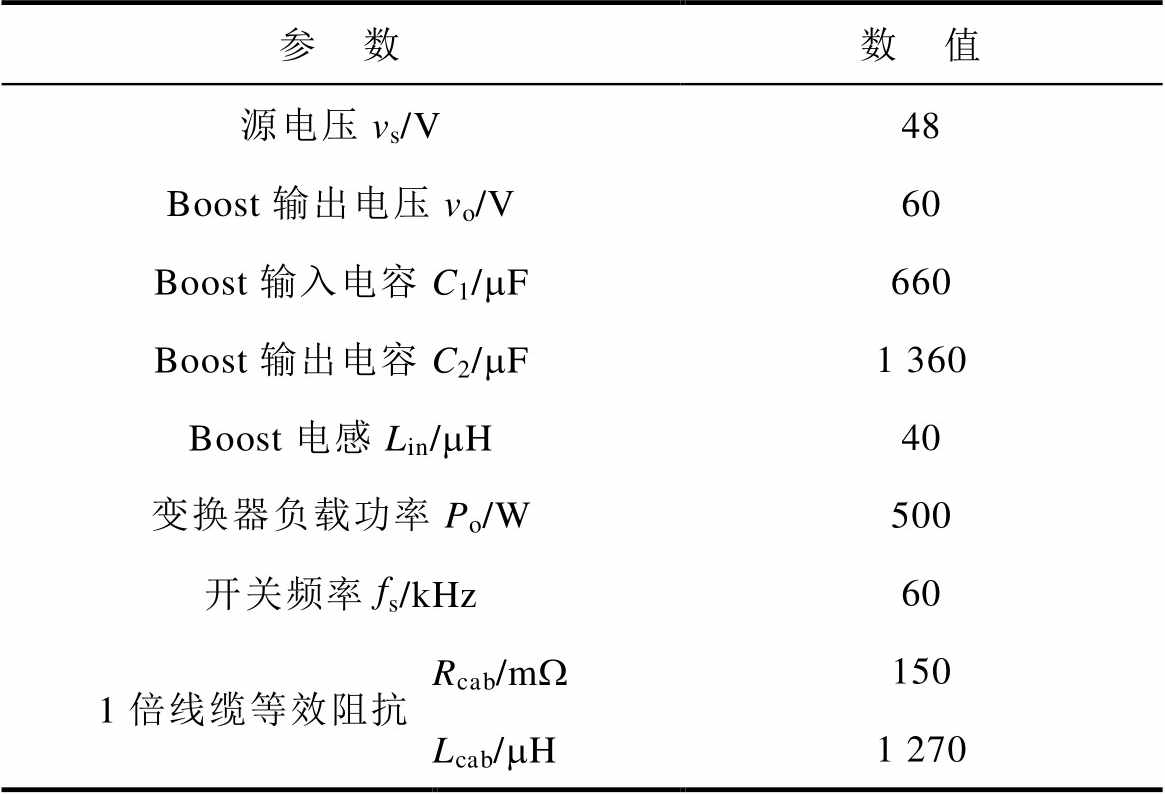
参 数数 值 源电压vs/V48 Boost输出电压vo/V60 Boost输入电容C1/mF660 Boost输出电容C2/mF1 360 Boost电感Lin/mH40 变换器负载功率Po/W500 开关频率fs/kHz60 1倍线缆等效阻抗Rcab/mW150 Lcab/mH1 270
首先测试注入给定谐波频率时系统的提频效果,为了分别测试基于跳点检测法和基于SOGI- FLL的振荡频率检测算法对于不同振荡频率下的单频纹波的提取效果,考虑在恒定直流电压vs的基础上注入不同频率且幅值恒定的正弦纹波扰动,如图18所示。其中输入电压vg幅值恒定为1.5 V,频段为50~300 Hz。输入电流ig频率与vg保持一致,但幅值会随着注入频点的变化而变化,这取决于系统输入阻抗的幅值|Zin|=|vg/ig|。下面给出两种算法对不同频率的单频纹波的提频效果见表3。其中JPD、SOGI-FLL分别代表基于跳点检测法和基于SOGI- FLL的振荡频率检测方法。
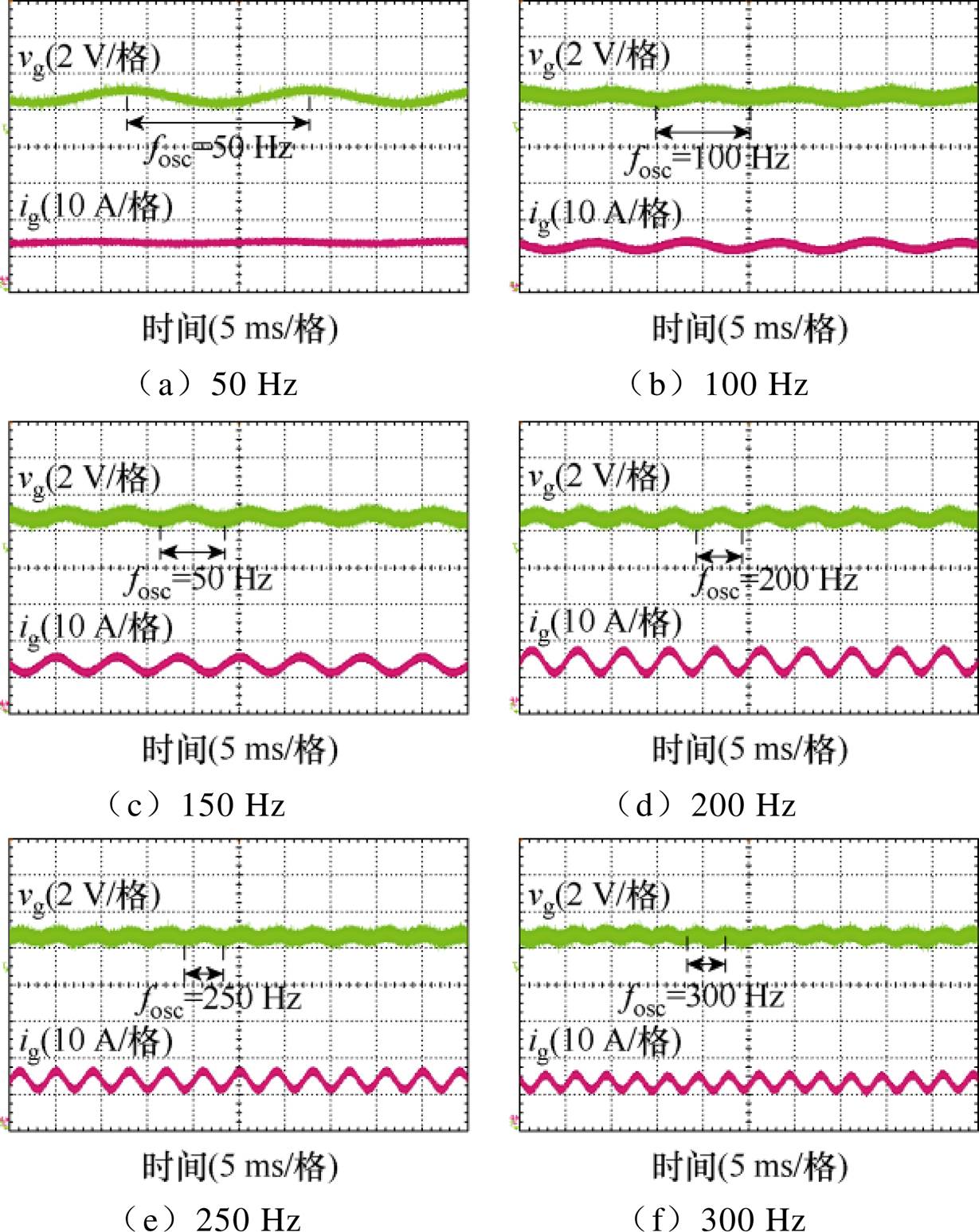
图18 不同频点下单频纹波的注入波形
Fig.18 Injection waveforms of single frequency ripple at different frequency points
表3 两种振荡频率检测算法对不同频点下单频纹波提频效果
Tab.3 Two adaptive algorithms for frequency extraction of single frequency ripple at different frequency points
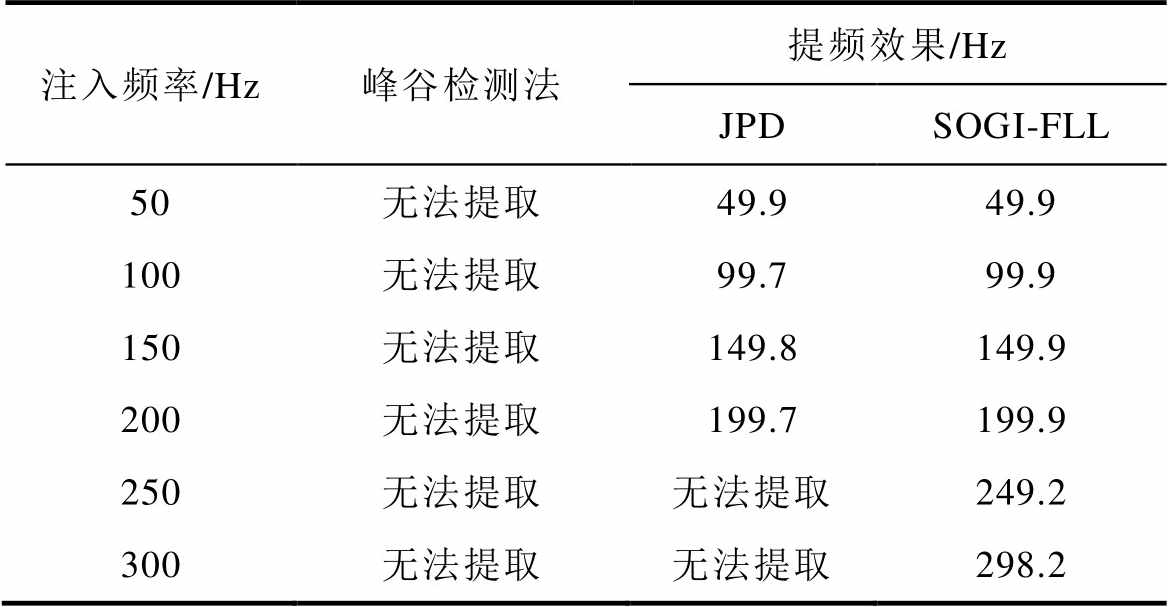
注入频率/Hz峰谷检测法提频效果/Hz JPDSOGI-FLL 50无法提取49.949.9 100无法提取99.799.9 150无法提取149.8149.9 200无法提取199.7199.9 250无法提取无法提取249.2 300无法提取无法提取298.2
由表3可得,传统的峰谷检测法由于算法简单、适用范围较窄,只能检测发散振荡波形频率,不能有效提取实际正弦波频率,而基于跳点检测法的振荡频率检测算法在实际中容易受到干扰,实际提频适用范围较窄,仅能提取50~200 Hz处的频率,超过该范围内便无法提取,但其响应速度较快;而基于SOGI-FLL的振荡频率检测算法在实际提频适用范围较宽,能够提取50~300 Hz频率下的单频纹波频率,并且提频精度较高。
为了验证所提算法对系统实际振荡的抑制效果,测试了前级分别带1倍、2倍线缆下所提基于跳点检测法和基于SOGI-FLL的振荡频率检测算法结合虚拟阻抗策略的实验效果,如图19、图20所示。同时给出在不同线缆下两种算法频率提取的结果,见表4。
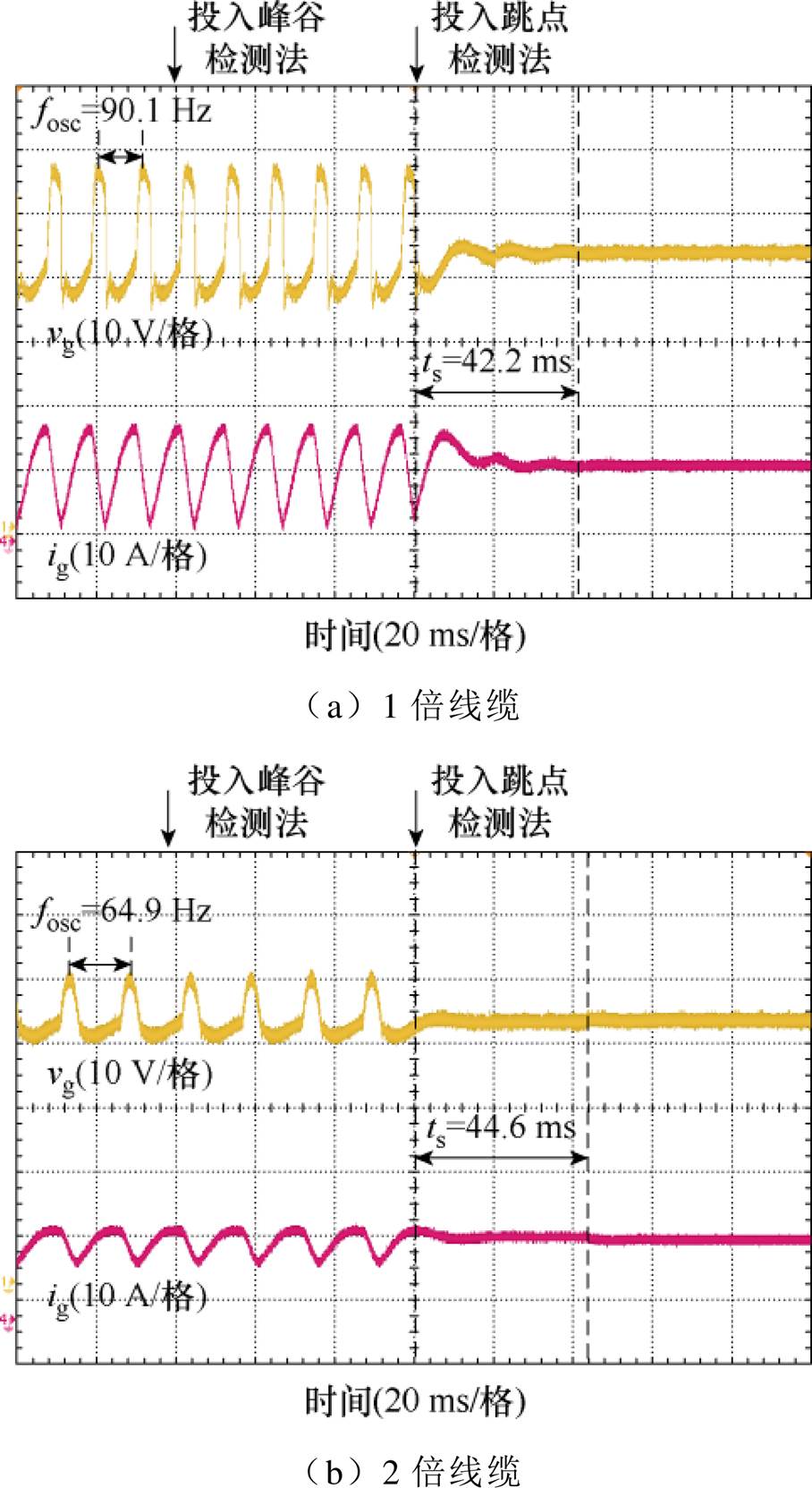
图19 不同线缆长度下峰谷检测法与跳点检测(JPD)法的振荡抑制效果
Fig.19 The oscillation suppression effect of peak valley detection method and JPD method under different cable lengths
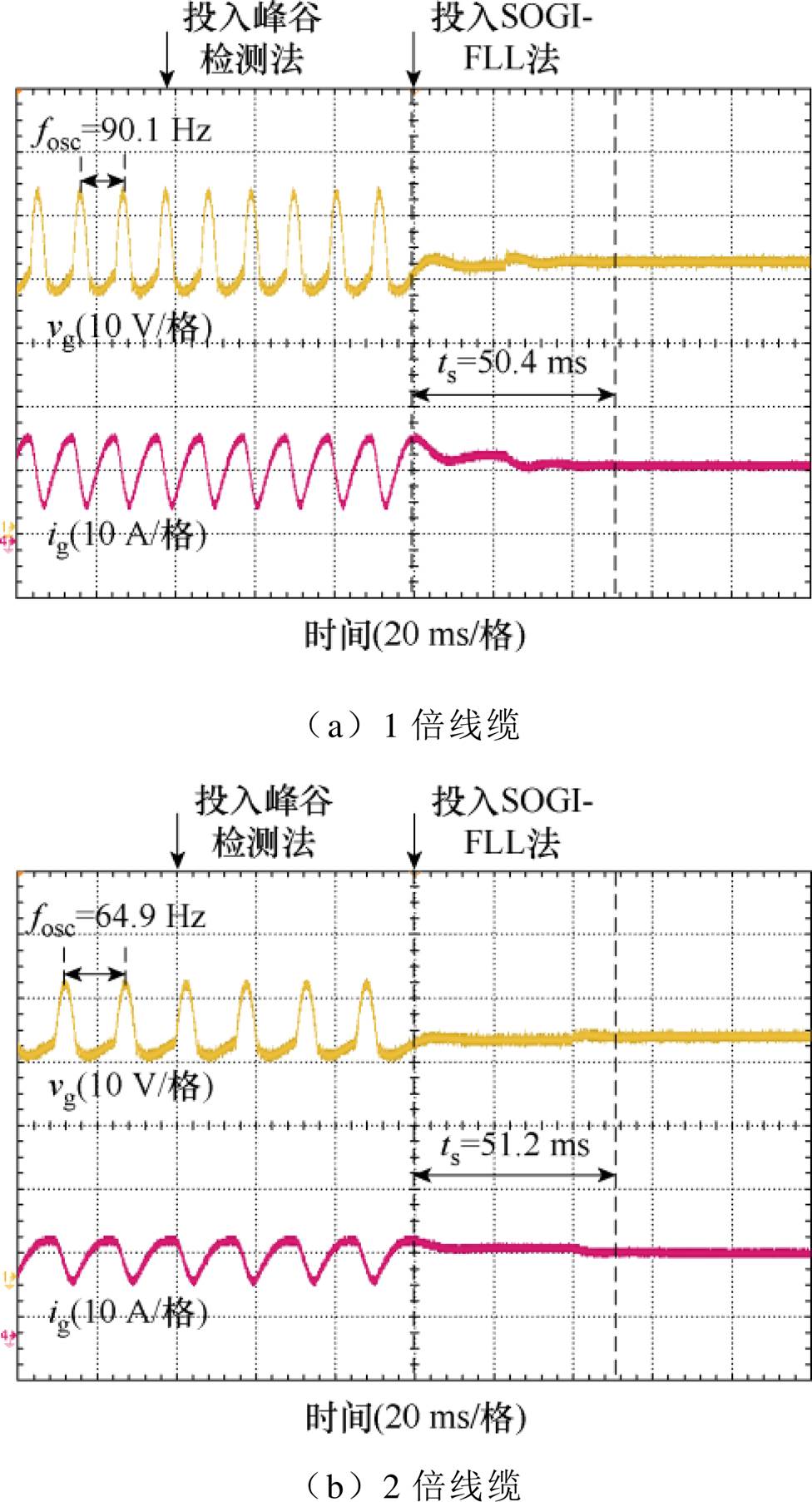
图20 不同线缆长度下峰谷检测法与SOGI-FLL法的振荡抑制效果
Fig.20 The oscillation suppression effect of peak valley detection method and SOGI-FLL method under different cable lengths
表4 不同工况下所提算法频率提取的结果对比
Tab.4 Comparison of frequency extraction results of algorithms proposed under different operating conditions (单位: Hz)

线缆长度1倍线缆2倍线缆 实际振荡频率90.164.9 峰谷检测法提取频率无法提取无法提取 跳点检测算法提取频率99.966.6 SOGI-FLL算法提取频率90.365
由实验结果可得,在投入传统的峰谷检测法后,传统算法只能检测系统发散振荡,而实际的振荡波形多为多频振荡中的等幅振荡,即一个主频波(幅值占振荡波的主要成分)叠加多个次频波(幅值占振荡波的极小成分)所构成,由于传统算法是针对纯正弦波而设计,不能有效检测实际振荡波形频率,从而导致虚拟阻抗策略不能有效抑制振荡。而所提两种振荡频率检测算法均能有效识别不同线缆下的系统振荡频率。基于跳点检测法的振荡频率检测算法响应速度更快,平均响应速度为43.4 ms,但其频率测量精度较低,平均精度为93.2%。基于SOGI- FLL的振荡频率检测算法较基于跳点检测法的振荡频率检测算法提频精度更高,在不同振荡频率下测量平均精度达到99.7%,在不同线缆下平均响应速度为50.8 ms。同时,所提的两种振荡频率检测算法结合虚拟阻抗策略后在1倍及2倍线缆下均能使系统保持稳定,证明了本文所提两种方案对于外界参数变化下的振荡抑制具有一定的鲁棒性。
现将两种方案从算法准确性、计算量、响应时间、宽频段适用性、算法不同场景适用性五个方面进行对比如图21所示。首先,对于算法准确性,由表3和表4可得,两种方案均可以提取频率的频段,基于SOFI-FLL的振荡频率提取算法准确性高于跳点检测算法,这是由于因为实际波形过零点较难提取,进而跳点检测算法将波形实际过零点转化为检测相邻的上跳点或下跳点进行振荡频率的计算,存在一定误差。其次,从计算量和响应时间来看,跳点检测法优于SOGI-FLL算法,这是由于跳点检测法仅需在每个周期对极值点进行记录而无需进行额外计算,而SOGI-FLL法需要计算振荡频率检测值的平均值来判断算法提取的频率是否稳定。再次,由于跳点检测法需要采集记录大量极值点来进行波形的判别与频率的计算,但由于实际算力有限,当振荡频率较高时,可能无法准确识别上跳点和下跳点,造成提频范围受限。最后,对于本文所提的两种算法,均可以直接从实际振荡波形进行振荡频率的提取而无需获取外部参数,所以不同场景下均具有较好的适用性。
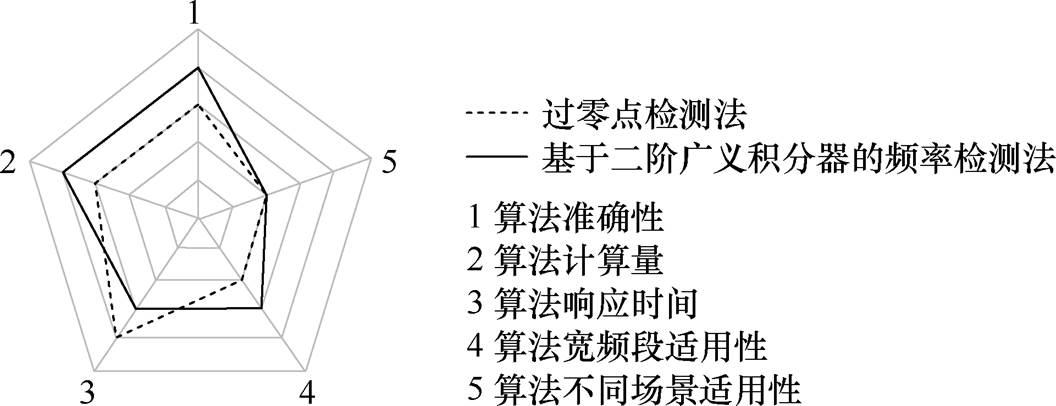
图21 方案对比分析
Fig.21 Comparison and analysis of the schemes
本文基于直流配电系统提出了两种振荡频率检测方法,并在实验平台中对两种方案进行了验证,结果表明:
1)基于跳点检测法的振荡频率检测方法相比于传统峰谷检测法适用范围更广,适用于实际振荡波形频率的提取。
2)基于SOGI-FLL的振荡频率检测方法可以对直流系统的振荡频率进行有效提取,提频范围大,频率提取的准确度较高,相比之下,基于跳点检测法的振荡频率检测方法提频响应速度更快,算力占比更小。
3)所提的两种振荡频率检测方法结合虚拟阻抗策略可以在系统结构及外界参数变化时实时检测振荡频率并抑制系统振荡。
参考文献
[1] Xia Yanghong, Wei Wei, Long Teng, et al. New analysis framework for transient stability evaluation of DC microgrids[J]. IEEE Transactions on Smart Grid, 2020, 11(4): 2794-2804.
[2] 王慧, 赵书强, 陈旭博, 等. 含类虚拟同步发电机和柔性负荷的直流微电网大信号稳定控制方法[J]. 电工技术学报, 2025, 40(3): 705-716.
Wang Hui, Zhao Shuqiang, Chen Xubo, et al. Large signal stability control method of DC microgrid with analogous virtual synchronous generator and flexible load[J]. Transactions of China Electrotechnical Society, 2025, 40(3): 705-716.
[3] Xu Luona, Guerrero J M, Lashab A, et al. A review of DC shipboard microgrids: part I: power architectures, energy storage, and power converters[J]. IEEE Transa- ctions on Power Electronics, 2022, 37(5): 5155-5172.
[4] 谢文强, 韩民晓, 严稳利, 等. 考虑恒功率负荷特性的直流微电网分级稳定控制策略[J]. 电工技术学报, 2019, 34(16): 3430-3443.
Xie Wenqiang, Han Minxiao, Yan Wenli, et al. Hierarchical stability control strategy of DC micro- grid considering constant power load performance[J]. Transactions of China Electrotechnical Society, 2019, 34(16): 3430-3443.
[5] 张泽华, 宋桂英, 张晓璐, 等. 考虑恒功率负载的直流微电网稳定性与鲁棒性控制策略[J]. 电工技术学报, 2023, 38(16): 4391-4405.
Zhang Zehua, Song Guiying, Zhang Xiaolu, et al. Stability and robustness control strategy of DC micro- grid considering constant power load[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4391- 4405.
[6] 逯华, 王喜莲, 周锦晗, 等. 基于虚拟阻抗的车网耦合系统低频振荡抑制[J]. 电工技术学报, 2025, 40(11): 3381-3394.
Lu Hua, Wang Xilian, Zhou Jinhan, et al. Low- frequency oscillation suppression of EMUs-traction network coupling system based on virtual impe- dance[J]. Transactions of China Electrotechnical Society, 2025, 40(11): 3381-3394.
[7] Middlebrook R D, Cuk S. A general unified approach to modelling switching-converter power stages[C]// 1976 IEEE Power Electronics Specialists Conference, Cleveland, OH, USA, 1976: 18-34.
[8] Wildrick C M, Lee F C, Cho B H, et al. A method of defining the load impedance specification for a stable distributed power system[J]. IEEE Transactions on Power Electronics, 1995, 10(3): 280-285.
[9] Feng Xiaogang, Liu Jinjun, Lee F C. Impedance specifications for stable DC distributed power systems[J]. IEEE Transactions on Power Electronics, 2002, 17(2): 157-162.
[10] Sun Jian. Impedance-based stability criterion for grid- connected inverters[J]. IEEE Transactions on Power Electronics, 2011, 26(11): 3075-3078.
[11] 刘笑, 杨建, 李力, 等. 基于机器学习的带被动阻尼直流微电网系统的稳定性检测[J]. 电工技术学报, 2024, 39(8): 2281-2293, 2324.
Liu Xiao, Yang Jian, Li Li, et al. Stability detection of DC microgrid systems with passive damping based on machine learning[J]. Transactions of China Electro- technical Society, 2024, 39(8): 2281-2293, 2324.
[12] Cao Xin, Zhong Qingchang, Ming Wenlong. Ripple eliminator to smooth DC-bus voltage and reduce the total capacitance required[J]. IEEE Transactions on Industrial Electronics, 2015, 62(4): 2224-2235.
[13] Wang Ruxi, Wang Fei, Boroyevich D, et al. A high power density single-phase PWM rectifier with active ripple energy storage[J]. IEEE Transactions on Power Electronics, 2011, 26(5): 1430-1443.
[14] 杜韦静, 张军明, 钱照明. Buck变流器级联系统直流母线电压补偿控制策略[J]. 电工技术学报, 2015, 30(1): 135-142.
Du Weijing, Zhang Junming, Qian Zhaoming. Com- pensation methodology for DC bus voltage of cascaded system formed by Buck converters[J]. Transactions of China Electrotechnical Society, 2015, 30(1): 135-142.
[15] 王成山, 李微, 王议锋, 等. 直流微电网母线电压波动分类及抑制方法综述[J]. 中国电机工程学报, 2017, 37(1): 84-98.
Wang Chengshan, Li Wei, Wang Yifeng, et al. DC bus voltage fluctuation classification and restraint methods review for DC microgrid[J]. Proceedings of the CSEE, 2017, 37(1): 84-98.
[16] He Bangbang, Chen Wu, Li Xin, et al. A power adaptive impedance reshaping strategy for cascaded DC system with Buck-type constant power load[J]. IEEE Transactions on Power Electronics, 2022, 37(8): 8909-8920.
[17] 张勤进, 张博, 刘彦呈, 等. 基于低频电流注入的船舶直流微电网线路阻抗检测[J]. 电力系统保护与控制, 2020, 48(8): 134-140.
Zhang Qinjin, Zhang Bo, Liu Yancheng, et al. A line impedance detection of a ship DC microgrid based on low frequency current injection[J]. Power System Protection and Control, 2020, 48(8): 134-140.
[18] Liu Zipeng, Liu Jinjun, Liu Zeng. A sampling opti- mized method for frequency response measurement in power electronics systems[J]. IEEE Transactions on Power Electronics, 2022, 37(7): 8447-8464.
[19] Su Xinyang, Wang Minghao, Zhao Bian, et al. An adaptive compensated virtual impedance method for oscillation suppression in DC distribution power systems[J]. IEEE Transactions on Industrial Elec- tronics, 2025, 72(5): 4854-4864.
[20] Man Jiufang, Chen Lei, Terzija V, et al. Mitigating high-frequency resonance in MMC-HVDC systems using adaptive Notch filters[J]. IEEE Transactions on Power Systems, 2022, 37(3): 2086-2096.
[21] Sun Jian, Buchhagen C. Self-adaptive detection and damping of power system resonances involving con- verters[C]//2022 IEEE 23rd Workshop on Control and Modeling for Power Electronics (COMPEL), Tel Aviv, Israel, 2022: 1-8.
[22] 邵振华, 陈冲, 林瑞全. 基于复合二阶广义积分的频率自适应谐波电流检测[J]. 电力自动化设备, 2012, 32(6): 51-55, 65.
Shao Zhenhua, Chen Chong, Lin Ruiquan. Harmonic current detection with adaptive frequency tracking based on multiple second-order generalized integr- ators[J]. Electric Power Automation Equipment, 2012, 32(6): 51-55, 65.
[23] Zhang Xin, Zhong Qingchang, Ming Wenlong. Stabi- lization of a cascaded DC converter system via adding a virtual adaptive parallel impedance to the input of the load converter[J]. IEEE Transactions on Power Electronics, 2016, 31(3): 1826-1832.
[24] Qu Zhi, Ebrahimi S, Amiri N, et al. Adaptive control method for stabilizing DC distribution systems with constant-power loads based on tunable active damping[C]//2018 IEEE 19th Workshop on Control and Modeling for Power Electronics (COMPEL), Padua, Italy, 2018: 1-6.
[25] 郑凯元, 杜文娟, 王海风. 聚合恒功率负荷对直流微电网稳定性影响的阻抗法分析[J]. 电网技术, 2021, 45(1): 134-148.
Zheng Kaiyuan, Du Wenjuan, Wang Haifeng. DC microgrid stability affected by aggregated constant power loads based on impedance method[J]. Power System Technology, 2021, 45(1): 134-148.
[26] Ahmadi R, Paschedag D, Ferdowsi M. Closed-loop input and output impedances of DC-DC switching converters operating in voltage and current mode control[C]//IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 2010: 2311-2316.
[27] Rodríguez P, Luna A, Muñoz-Aguilar R S, et al. A stationary reference frame grid synchronization system for three-phase grid-connected power converters under adverse grid conditions[J]. IEEE Transactions on Power Electronics, 2012, 27(1): 99-112.
[28] Rodriguez P, Luna A, Candela I, et al. Grid syn- chronization of power converters using multiple second order generalized integrators[C]//2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 2008: 755-760.
Oscillation Frequency Detection Methods Based on Jump Point Detection and Second-Order Generalized Integrator Frequency-Locked Loop for DC Power Distribution Systems
Abstract TThe DC distribution power system is gradually being widely used due to its low power loss and easy control of power flow. However, its high degree of power electronicization can cause impedance mismatches between power electronic devices, leading to system oscillation. The virtual impedance strategy has become the mainstream solution due to its low cost and lack of need for external devices. However, in practical DC distribution power systems, such as data center power supply systems, changes in oscillation frequency caused by frequent alterations in system structure and external parameters limit their oscillation-suppressing effect. This paper proposes two oscillation frequency detection methods: one based on the jump point detection method and the other on the second-order generalized integrator frequency-locked loop (SOGI-FLL).
To solve the oscillation problem in DC distribution power systems, the actual multi-parallel system is first simplified into a typical cable-converter cascade system. While the source and load side impedance models are established separately, impedance criteria are used to determine system stability. Then, the stability principle and key parameters of the virtual impedance strategy are introduced, and the effectiveness of suppressing oscillations with virtual impedance is theoretically verified.
The oscillation frequency detection method based on the jump point detection method is proposed. The principle of the traditional peak valley detection method for detecting oscillation frequency is introduced. The problems existing in its application process are analyzed. Then, a jump point detection algorithm is introduced to expand the applicability. Meanwhile, the frequency extraction principle of the jump point detection algorithm is derived, and an adaptive oscillation suppression strategy is designed in combination with the traditional virtual impedance strategy. Based on the actual cable and transformer operating conditions, the algorithm parameters are reasonably intended.
Then, this paper proposes an oscillation frequency detection method based on SOGI-FLL. The frequency extraction principle of SOGI-FLL is introduced. Combined with the traditional virtual impedance strategy, it is incorporated into the design of an adaptive oscillation suppression strategy for the DC system. The principles of parameter selection are derived, and the impact of parameters on system performance is analyzed.
The results on the 48 V to 60 V/500 W platform indicate that both proposed oscillation frequency detection algorithms can extract single-frequency ripple frequencies with excellent accuracy. The suppression effect of two algorithms is tested when the cable changes. The results indicate that, combined with the virtual impedance strategy, the two proposed oscillation frequency detection strategies can suppress system oscillations. The oscillation frequency detection method based on SOGI-FLL offers higher frequency extraction accuracy and a wider frequency extraction range. In contrast, the method based on jump point detection provides faster frequency extraction speed and reduced computing power consumption. Meanwhile, both strategies have good wideband applicability.
keywords:Virtual impedance, oscillation frequency, adaptive, jump point detection, second-order generalized integrator frequency-locked loop (SOGI-FLL)
中图分类号:TM721.1; TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250891
陕西省重点研发计划资助项目(2024PT-ZCK-81)。
收稿日期 2025-05-26
改稿日期 2025-07-17
樊囿麟 男,2002年生,硕士研究生,研究方向为DC-DC变换器的建模、控制及稳定性分析。
E-mail: Youlin_Fan@stu.xjtu.edu.cn
王 跃 男,1972年生,教授,博士生导师,研究方向为新能源变流器控制与稳定性分析、柔性直流输电等。
E-mail: davidwangyue@mail.xjtu.edu.cn(通信作者)
(编辑 陈 诚)