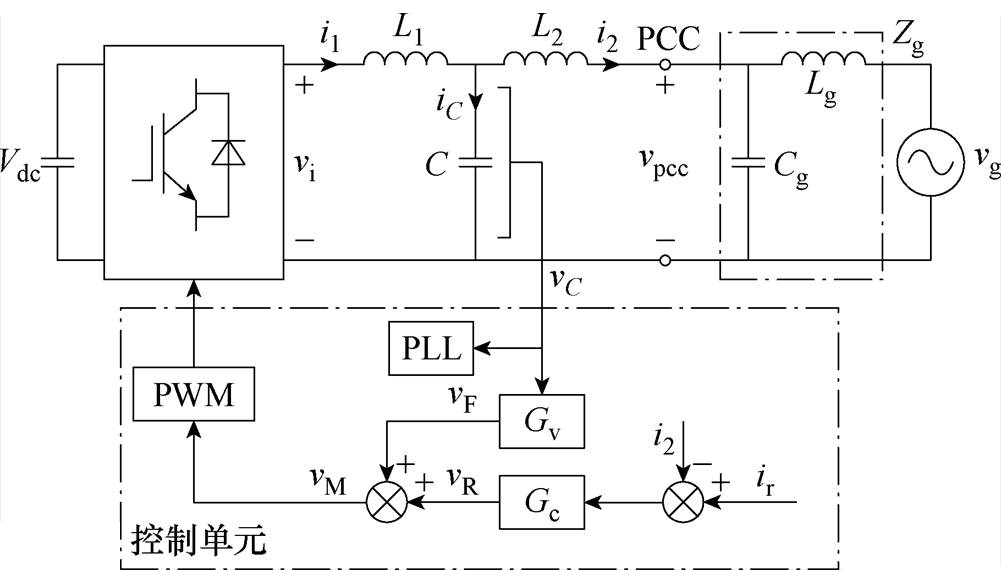
图1 LCL型并网逆变器拓扑及其控制结构
Fig.1 Topology and control structure of LCL-type grid-connected inverter
摘要 重复控制器因其可以同时实现基波参考信号的无静差跟踪和谐波扰动的抑制,而在LCL型并网逆变器的电流控制中得到了广泛应用。然而,使用重复控制器会导致逆变器输出导纳在谐波频率附近出现负实部,从而威胁在弱电网下逆变器与电网的互连稳定性。鉴于此,该文提出一种基于无源性的重复控制策略。首先,采用频域无源理论指导重复控制器的设计,开发一种三阶零相移低通滤波器来消除重复控制器引入的负实部导纳。其次,利用电容电压前馈方法消除了LCL型并网逆变器输出导纳固有的负实部,从而获得一个奈奎斯特频率范围内的无源逆变器输出导纳,保证系统在任何无源电网阻抗下的稳定性。最后,通过仿真和实验验证了所提重复控制策略能有效抑制电流谐波,并对电网阻抗变化具有很强的鲁棒性。
关键词:LCL型滤波器 并网逆变器 稳定性 无源性 重复控制
LCL型并网逆变器作为分布式发电系统的关键组成部分,负责将可再生能源生成的直流电转换为高质量的交流电并注入到电网[1]。为了获得总谐波畸变率小于5%的高质量入网电流,重复控制(RepetitiveControl, RC)被广泛应用于LCL型并网逆变器中以消除死区效应和电网电压背景谐波引起的入网电流谐波[2]。然而,传统RC控制器的内模包含一个基波周期的延迟,因此其动态响应较慢[3],而且其谐波抑制能力对电网频率波动的影响敏感[4]。
针对RC动态响应慢的问题,目前所提出的解决方法主要分为两类。一类是通过减小内模中的延迟单元数量来提高RC动态响应速度。文献[5]提出了一种只包含奇次谐波内模的RC控制器,它具有传统RC控制器一半的延迟单元数量,因此可以实现更快的跟踪误差收敛速度。随后,通过修改RC控制器的内模开发出了一系列改进的RC控制器,如6k±1次谐波的RC控制器[6]、双模RC控制器[7]和nk±m次谐波的RC控制器[8]。这些改进RC控制器本质是通过调整RC的内模结构来增大RC谐振峰幅值,从而进一步提高RC系统的动态性能。另一类是通过改进RC控制器的结构来提高RC增益,从而获得更快的动态响应。文献[9-10]利用一个正比例增益与传统RC控制器和改进的RC控制器并联,以抵消RC控制器等效的负比例增益,从而使RC控制器能够适应一个更大的RC增益。文献[11]和文献[12]分别在奇次谐波RC控制器和双模RC控制器的内模中引入前馈环节,提高了RC控制器在谐波频率处的增益,从而改善了系统的动态性能。为了增强RC控制器的频率自适应性,一种方法是根据变化的电网频率实时调整采样频率来保证RC的延迟单元数为整数[13],但这会显著增加系统的实现复杂度;另一种方法是采用分数延迟滤波器来近似RC控制器的分数延迟[14],如基于拉格朗日插值算法的有限脉冲响应滤波器[15-16]和基于Thiran算法的无限脉冲响应滤波器[17-18],这两种滤波器都可以实现分数延迟的在线调整和系数的快速更新,从而使RC控制器具有频率自适应能力。
然而,上述RC控制器除了在期望的谐波频率处提供高增益,还会在系统截止频率之上的高阶谐波频率处引入谐振峰,这会威胁系统的稳定性。根据基于阻抗的稳定判据可知[19],逆变器电网系统的稳定条件为:首先,逆变器在零电网阻抗下是稳定的,这个稳定条件与逆变器本身的稳定性相关,定义为内部稳定性;其次,电网与逆变器的阻抗比满足奈奎斯特判据,这个稳定条件涉及逆变器与电网的动态相互作用,定义为外部稳定性。上文所讨论的RC控制器是在已知感性电网阻抗下基于内部稳定性而设计的,并没有考虑RC控制器对系统外部稳定性的影响。在弱电网下,电网阻抗复杂多变,使用RC控制器后电网阻抗与逆变器输出阻抗的相互作用可能会导致系统不稳定。文献[20]中发现,使用插入式RC控制器会导致逆变器输出导纳出现负实部。为了确保系统的外部稳定性,有必要减小RC增益以消除RC控制器造成的负实部导纳[21],但这会降低RC系统的动态性能。
针对上述问题,提出了一种基于无源性的重复控制策略。首先,设计了一种三阶零相移低通滤波器来修正RC控制器的内模,它能够在不减小RC增益的前提下消除RC控制器造成的负实部导纳。其次,利用一种电容电压前馈方法消除LCL型并网逆变器输出导纳固有的负实部区域,从而实现了奈奎斯特频率范围内的无源导纳。最后,所提出的重复控制策略不仅具有快速的动态响应和精确的谐波抑制能力,而且对电网阻抗变化具有很强的鲁棒性,仿真和实验验证了所提控制策略的有效性。
LCL型并网逆变器拓扑及控制结构如图1所示,图1中,LCL型滤波器由逆变器侧电感L1、滤波电容C和电网侧电感L2组成。从公共耦合点(Point of Common Coupling, PCC)处看到的电网可以建模为一个理想电压源vg串联一个电网阻抗Zg,Zg由传输电缆与变压器的电感Lg和功率因数校正电路的电容Cg所引入。为了分析不具有无源阻尼的稳定性最坏情况,忽略拓扑中所有元件的寄生电阻。
LCL型并网逆变器采用电网侧电流控制方式,电流控制器Gc调节电网侧电流i2使其跟踪电流参考信号ir。电容电压vC被测量用于电容电压前馈(Capacitor Voltage Feedforward, CVF)方法中,并输入到锁相环(Phase-Locked Loop, PLL)以实现电网同步。Gv为CVF控制器。PLL主要影响逆变器与电网的低频交互,可以通过设计它的带宽小于电网基波频率来避免低频振荡[22]。本文主要研究中高频范围内逆变器电流控制回路的动态,因此忽略PLL的动态影响。由于直流电压控制回路的带宽远低于电流控制回路的带宽,因此可以假设直流母线电压Vdc恒定。vi为逆变器侧输出电压,i1为逆变器侧电流,iC为电容电流,vpcc为PCC电压,电流控制器的输出vR与CVF控制器的输出vF相加得到调制信号vM。
图1 LCL型并网逆变器拓扑及其控制结构
Fig.1 Topology and control structure of LCL-type grid-connected inverter
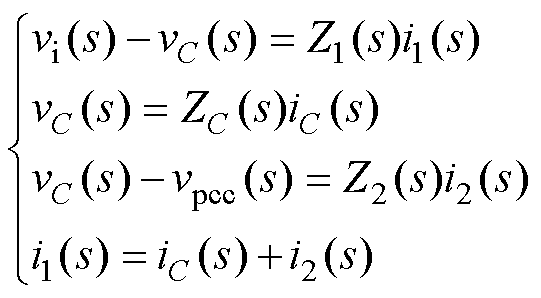
在s域内,根据基尔霍夫电压和电流定律,得到LCL型滤波器的电压、电流方程为
 (1)
(1)
式中,Z1、ZC和Z2分别为L1、C和L2的阻抗。逆变器输出电压vi可表示为
 (2)
(2)
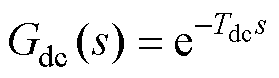
式中,Gdc(s)为数字控制延迟,通常由一个采样周期的计算延迟和半个采样周期的PWM延迟组成[20],表示为
 (3)
(3)
式中,Tdc为拖延时间,Tdc=1.5Ts,Ts为采样周期。
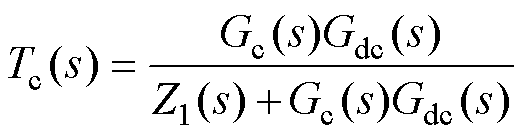
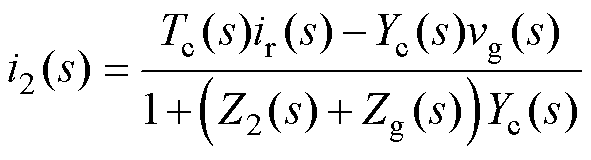
电网侧电流控制的逆变器可以被建模为一个电流源并联一个从vC处看到的输出导纳。结合式(1)和式(2),将vC视为扰动,i2可以推导为
 (4)
(4)
式中,诺顿电流源传递函数Tc和逆变器输出导纳Yc分别表示为
 (5)
(5)
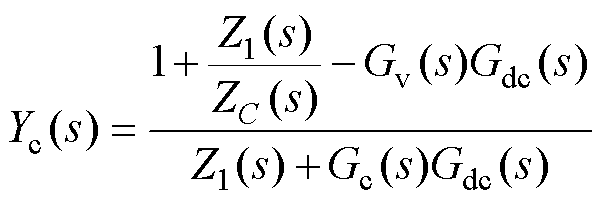 (6)
(6)
可以发现,Yc能分解为两个并联的子导纳Ycg和Ycv,分别由电网侧电流控制和CVF所形成,即
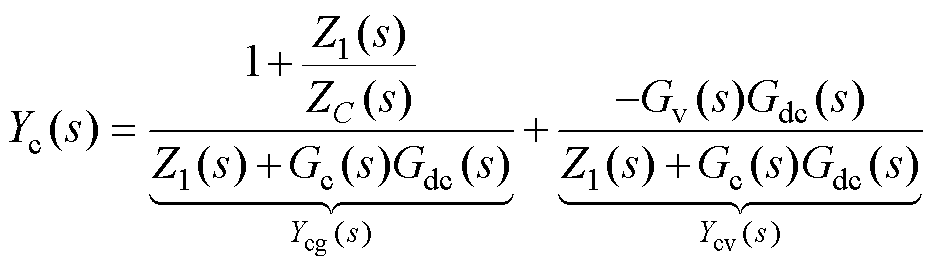 (7)
(7)
然后,可以得到如图2所示的LCL型并网逆变器系统的等效电路。
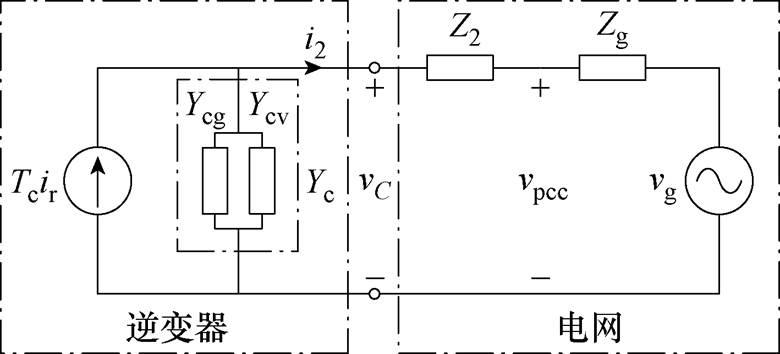
图2 LCL型并网逆变器系统的等效电路
Fig.2 Equivalent circuit of LCL-type grid-connected inverter system
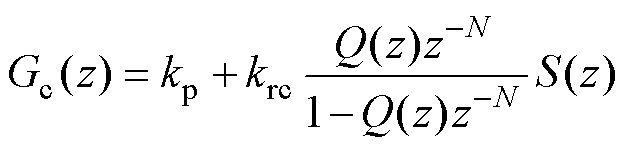
与插入式RC控制器相比,采用并联结构的比例重复控制器(Proportional-Repetitive Controlter, PRC)能够适应更大的RC增益[10],从而实现更快的动态响应。因此选择PRC作为电流控制器Gc,其结构如图3所示。在z域内,PRC表示为
 (8)
(8)
式中,kp为比例增益;krc为RC增益;N为一个基波周期内的采样次数,N=fs/f0,fs为采样频率,f0为基波频率;Q(z)为低通滤波器小于1的常数,用于在系统稳定性和跟踪精度之间实现良好的平衡;S(z)为相位超前补偿器,用于补偿系统的相位滞后。通常Q(z)为一阶零相移低通滤波器[7-13],Q(z)=a1z+ a0+a1z-1,其中a0+2a1=1,a0>0,a1>0。为便于数字控制器实现相位补偿,选择线性相位超前补偿器S(z)=zm,m为超前步长。
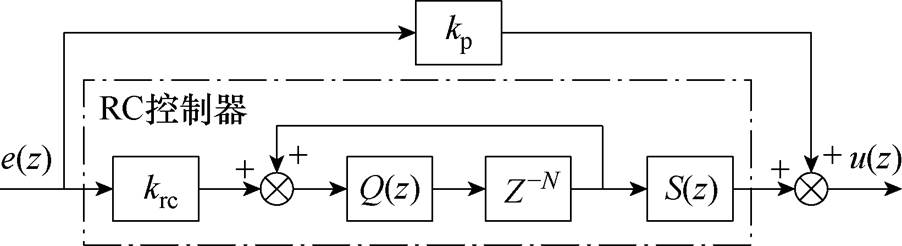
图3 PRC控制器结构
Fig.3 Structure of PRC
由图2可知,电容电压vC可表示为vC=(Z2+Zg)i2+ vg,将它代入式(4),得到从vg处看到的整个逆变器电网系统的电流响应为
 (9)
(9)
根据基于阻抗的稳定判据可知,系统稳定的充分必要条件为[19]:①Tc(s)是稳定的,这意味着Yc(s)也是稳定的;②(Z2(s)+Zg(s))Yc(s)满足奈奎斯特判据。使用基于阻抗的稳定判据需要事先了解具体的电网阻抗值,但实际中电网阻抗复杂多变,难以获得电网阻抗的详细信息。
基于无源性的稳定性分析为互连稳定性的评估提供了一种更有前景的方法。根据频域无源理论[23],如果满足以下两个条件,则Yc是无源的:①Yc是稳定的;②Yc具有一个非负实部,即Re{Yc(jw)}≥0对于所有w,意味着Yc的相位在[-90°, 90°]之间。可以发现,条件①保证了系统的内部稳定性。由于电网阻抗由电阻、电感、电容网络组成,它显然是无源的,如果Yc的相位在[-90°, 90°]之间,则奈奎斯特曲线不能包围(-1, j0),因此条件②能够保证外部稳定性。可以得出结论,只要逆变器输出导纳是无源的,无论电网阻抗如何变化,逆变器电网系统都是稳定的。
需要注意的是,无源的逆变器输出导纳只是系统稳定的充分不必要条件。只要逆变器输出导纳和电网导纳幅频曲线相交于导纳呈现无源性的频率区域,即具有非负实部的频率区域,系统就是稳定的,这表明系统稳定并不要求逆变器输出导纳在所有频率范围都具有无源性。因此,并网逆变器基于无源性的稳定性分析是通过评估在频域内输出导纳的无源特性来预测系统可能出现不稳定的频率区域,从而为系统设计提供指导。对于数字控制的并网逆变器,由于无源性不可能在所有频率处获得,因此无源性评估通常只执行到奈奎斯特频率。
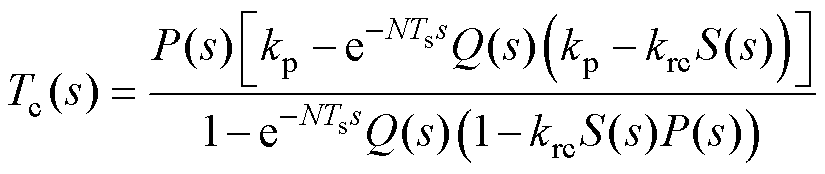
为了获得一个无源的逆变器输出导纳,首先要保证导纳是稳定的,即诺顿电流源传递函数Tc是稳定的。在s域内,将式(8)代入式(5),Tc可重新表示为
 (10)
(10)
式中,P(s)=Gp(s)/(1+kpGp(s)),内部被控对象Gp(s)= Gdc(s)/Z1(s)。根据式(10)可知,当满足以下两个条件时,Tc是稳定的:
(1)1+kpGp(s)=0的根位于s左半平面内。
(2)RC控制器参数满足
 (11)
(11)
根据上述两个内部稳定性条件,PRC的参数设计过程如下:首先,基于第一个内部稳定性条件和所需的控制带宽来选择合适的kp;其次,利用根据电流谐波分布确定的剪切频率来设计Q(s);最后,krc和S(s)的超前步长m的稳定范围可以根据第二个内部稳定性条件来确定。
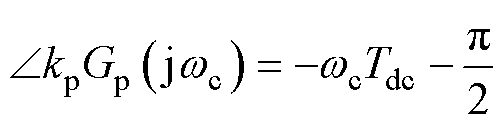
通过利用内部开环传递函数kpGp(s)设计合适的相位裕度(Phase Margin, PM),可以满足第一个内部稳定性条件。kpGp(s)在穿越频率wc处的相位为
 (12)
(12)
对于一个给定的PMjm,可以推导出所需的wc为
 (13)
(13)
kpGp(s)的幅值在wc处为1,得到对应的kp为
 (14)
(14)
在频域内,Q(s)的幅频特性用Nq(w)表示,它的相频特性为零;S(s)的相频特性用qs(w)表示,它的幅频特性为1;Gp(s)的幅频特性和相频特性分别用Np(w)和qp(w)表示。利用这些频率特性,式(11)可以重新整理为
 (15)
(15)
其中
 (16)
(16)
 (17)
(17)
由式(17)可知,f2(w)为正,故式(15)中以krc为未知量的二次方程有两个不相等的实根,分别为负根x1(w)和正根x2(w)。由于krc为正,故可以推出krc的稳定范围为
 (18)
(18)
为了使式(18)在奈奎斯特频率范围内都成立,krc必须小于x2(w)相对于w的最小值x2(w)min,故krc的上边界为x2(w)min。m为x2(w)的参数,它会影响x2(w)关于w的变化趋势,从而影响krc的稳定范围。为了获得一个大的krc稳定范围,m的选择应该使x2(w)min尽可能大。图4显示了m取不同值时x2(w)的曲线。可以看出,m的取值对x2(w)min有显著的影响,过大或过小的m都会产生一个很小的x2(w)min。当m=3或m=4时,x2(w)min可以取到最大值。此时,x2(w)是在w=0处取得最小值,故将w=0代入式(18),得到krc的最大稳定范围为
 (19)
(19)
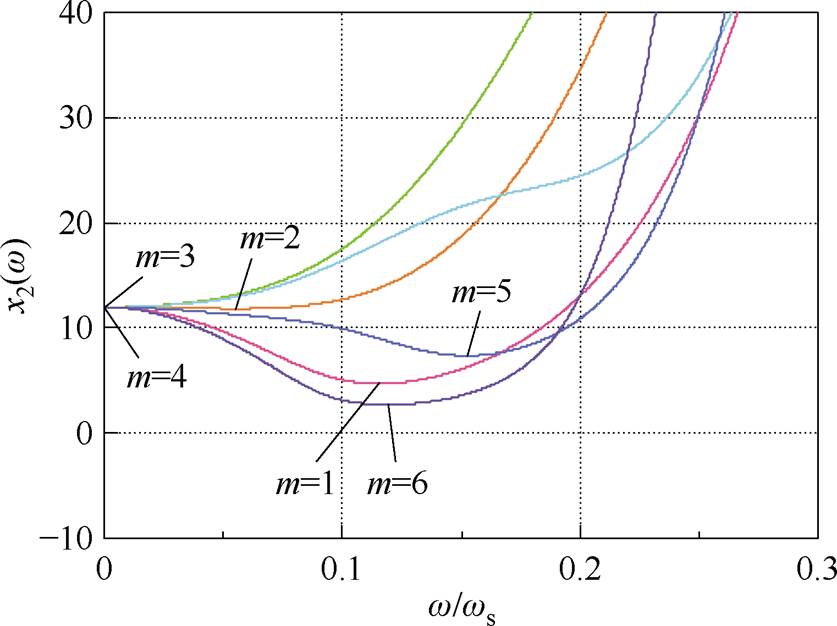
图4 m取不同值时x2(w)的曲线
Fig.4 Curves of x2(w) with different m
由式(7)可知,逆变器输出导纳Yc由电网侧电流控制产生的子导纳Ycg和CVF产生的子导纳Ycv并联组成。为了便于分析,首先研究PRC对Ycg实部的影响。利用Q(s)和S(s)的频率特性,PRC的实部和虚部可以分别推导为
 (20)
(20)
 (21)
(21)
使用Re{Gc}和Im{Gc},式(7)中Ycg的实部可以推导为
 (22)
(22)
其中
 (23)
(23)
 (24)
(24)
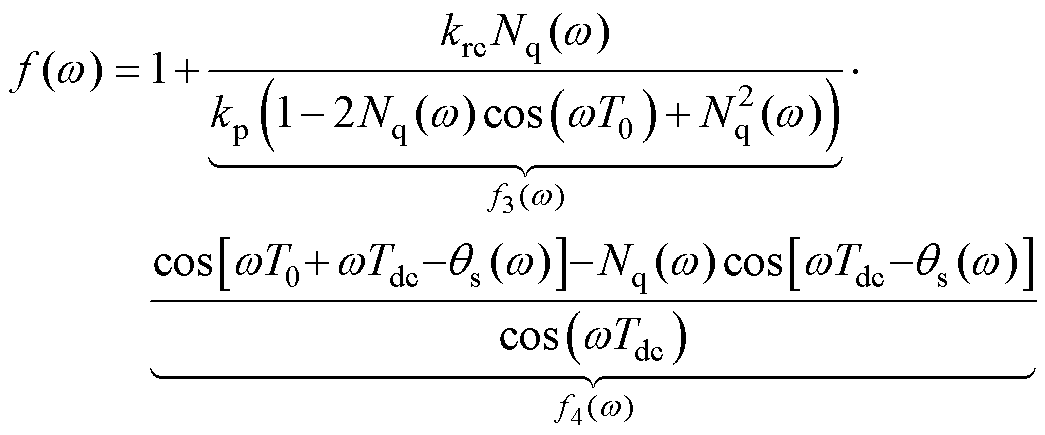
从式(22)中可以看出,Re{Ycg}的符号性质取决于它分子的符号性质。分子中的kp(1-L1Cw2)cos(wTdc)项对应于无RC控制器时Re{Ycg}的分子[24]。考虑RC控制器的影响后,分子中还包含了另一个f(w)项。f(w)的符号变化会影响Re{Ycg}的符号变化,于是可以用它来表征RC控制器对Re{Ycg}的影响。由式(24)可知,f3(w)恒为正,因而f(w)的符号变化是由f4(w)引起的。由于余弦函数的周期性,f4(w)的符号会在谐波频率附近发生变化。此外,f(w)的符号变化还受f3(w)大小的影响,当f3(w)f4(w)>-1时,f4(w)不会引起f(w)的符号变化。根据f4(w)分母中cos(wTdc)的性质可知,当w=ws/6和ws/2时,cos(wTdc)的值为零,即f4(w)接近无穷大,因此在这两个频率附近f(w)的符号主要取决于f4(w)。
选择kp=6和m=3,为Q(z)选择a0=0.2以实现2 000 Hz的剪切频率,得到krc取不同值时f(w)和Re{Ycg}的曲线如图5所示。可以看出,当krc=4时,f(w)的符号在某些谐波频率附近发生变化,导致Re{Ycg}的符号发生变化,从而在原本的正实部区域(krc=0时)中引入负实部区域。根据式(24)可知,通过调整krc来减小f3(w)可以抑制f(w)的符号变化。当krc减小为1时,f(w)在一些谐波频率附近的符号变化消失,从而消除了对应的负实部区域。然而,在ws/6和ws/2附近的负实部区域仍然存在,这是因为在这两个频率附近f4(w)太大,以至于难以通过减小krc来消除f(w)的符号变化。
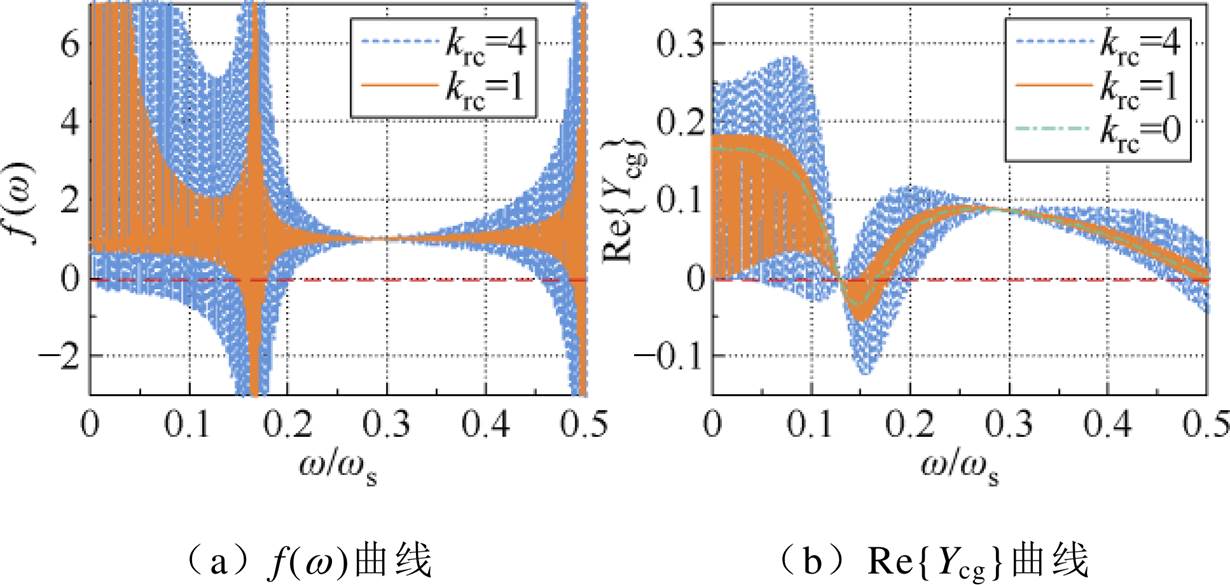
图5 krc取不同值时f(w)和Re{Ycg}的曲线
Fig.5 Curves of f(w) and Re{Ycg} with different krc
虽然显著减小krc可以消除PRC造成的某些负实部区域,但是这样做会严重降低PRC的误差收敛速度。此外,在ws/6和ws/2附近的负实部区域难以通过减小krc来消除。由式(24)可知,除了krc以外,还可以通过调整Nq(w)来减小f3(w),以抑制f(w)的符号变化。对于传统一阶零相移低通滤波器Q(z),它的幅频特性Nq(w)表示为
 (25)
(25)
当a0≤0.5时,Nq(w)在奈奎斯特频率范围内存在一个零点,如图6a所示,对应的频率称为零幅值频率。a0=0.2时Q(z)的零幅值频率位于4 600 Hz附近,在这里Q(z)有效地消除了f(w)的符号变化且 f(w)接近于1,如图5a所示。因此,一个直观的想法是利用Q(z)的零幅值来消除PRC造成的负实部区域。然而,一阶Q(z)只有一个零幅值,位于(ws/4,ws/2)的范围内,而且,由于它的高频衰减能力差,它不能有效抑制零幅值频率以外的f(w)的符号变化。
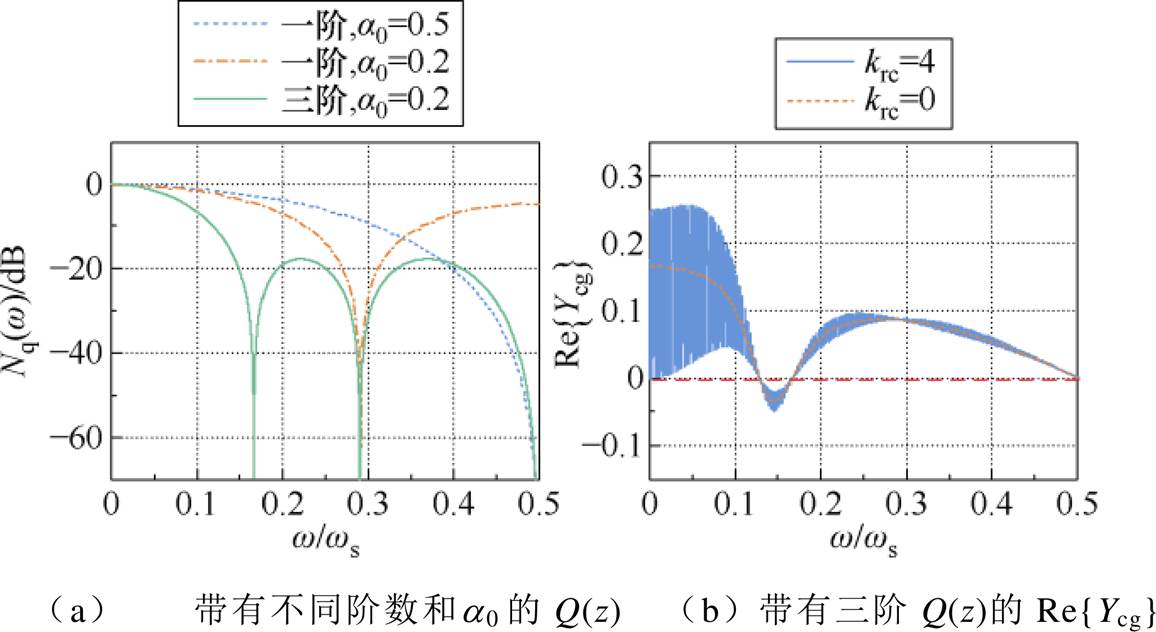
图6 Q(z)的幅频特性和对应的Re{Ycg}曲线
Fig.6 Magnitude response of Q(z) and curves of Re{Ycg}
鉴于此,本文开发了一种三阶零相移低通滤波器来消除PRC造成的负实部区域。三阶零相移低通滤波器的一般形式为
 (26)
(26)
式中,2a3+2a2+2a1+a0=1。三阶Q(z)具有3个零幅值。为了消除ws/6和ws/2附近的负实部区域,将其中2个零幅值分别设置在ws/6和ws/2处,这要求Q(z)的幅频特性满足式(27)所示的两个条件。然后,可以得到对应的滤波器参数要求。
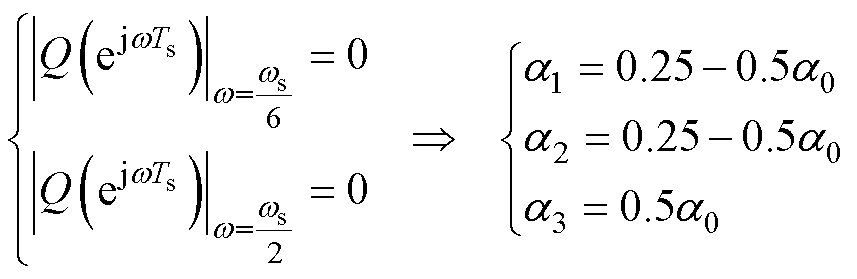 (27)
(27)
可以看出,所提出的三阶Q(z)只需要设计1个滤波器参数a0。通过调整a0可以改变第3个零幅值的位置,它被放置在ws/6与ws/2之间以增强Q(z)的高频衰减能力,如图6a所示。带有三阶Q(z)的Re{Ycg}的曲线如图6b所示。与图5b相比可以看出,在不减小krc的情况下,通过使用所提出的三阶Q(z),PRC在ws/6与ws/2附近和其他谐波频率附近造成的负实部区域都被有效消除。因此,所提出的三阶Q(z)不仅使PRC能够容纳高RC增益,而且增强了RC系统的稳定鲁棒性。
虽然PRC造成的负实部区域被消除,但是Ycg
在( ,ws/6)区域内固有的负实部仍然存在,如图6b所示,这会在逆变器输出导纳Yc中引入负实部区域,从而威胁系统的稳定性。由式(7)可知,可以利用CVF产生的子导纳Ycv的正实部来抵消Ycg的负实部。为此,采用文献[24]提出的基于低通滤波器的CVF方法来消除电网侧电流控制的逆变器输出导纳固有的负实部,CVF控制器表示为
,ws/6)区域内固有的负实部仍然存在,如图6b所示,这会在逆变器输出导纳Yc中引入负实部区域,从而威胁系统的稳定性。由式(7)可知,可以利用CVF产生的子导纳Ycv的正实部来抵消Ycg的负实部。为此,采用文献[24]提出的基于低通滤波器的CVF方法来消除电网侧电流控制的逆变器输出导纳固有的负实部,CVF控制器表示为
 (28)
(28)
式中,Kf为CVF增益;a为低通滤波器系数。
图7显示了使用CVF方法和不同Q(z)时的Re{Yc}曲线。可以看出,当不使用RC控制器时(即krc=0时),Re{Yc}在奈奎斯特频率范围内都为正,这表明CVF消除了电网侧电流控制的逆变器输出导纳固有的负实部。然而,使用带有传统一阶Q(z)的RC控制器时,Yc在ws/6和ws/2附近仍存在负实部。相比之下,使用所开发的三阶Q(z)后,RC控制器引入的负实部被消除,Yc在奈奎斯特频率范围内都具有非负实部。因此,所提出的基于无源性的重复控制策略为LCL型并网逆变器在奈奎斯特频率范围内实现了一个无源的输出导纳。
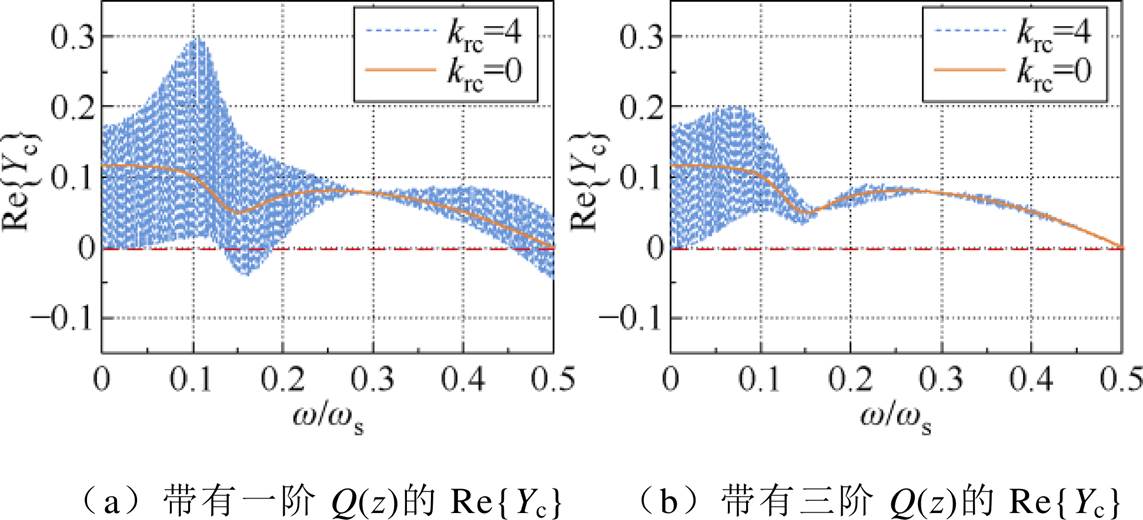
图7 使用CVF方法和不同Q(z)时的Re{Yc}曲线
Fig.7 Curves of Re{Yc} with CVF method and different Q(z)
为了验证理论分析的正确性和所提控制策略的有效性,首先利用Matlab进行了仿真验证,随后在并网逆变器实验平台上进行了测试。所使用的LCL型并网逆变器参数见表1。
表1 LCL型并网逆变器参数
Tab.1 LCL-type grid-connected inverter parameters
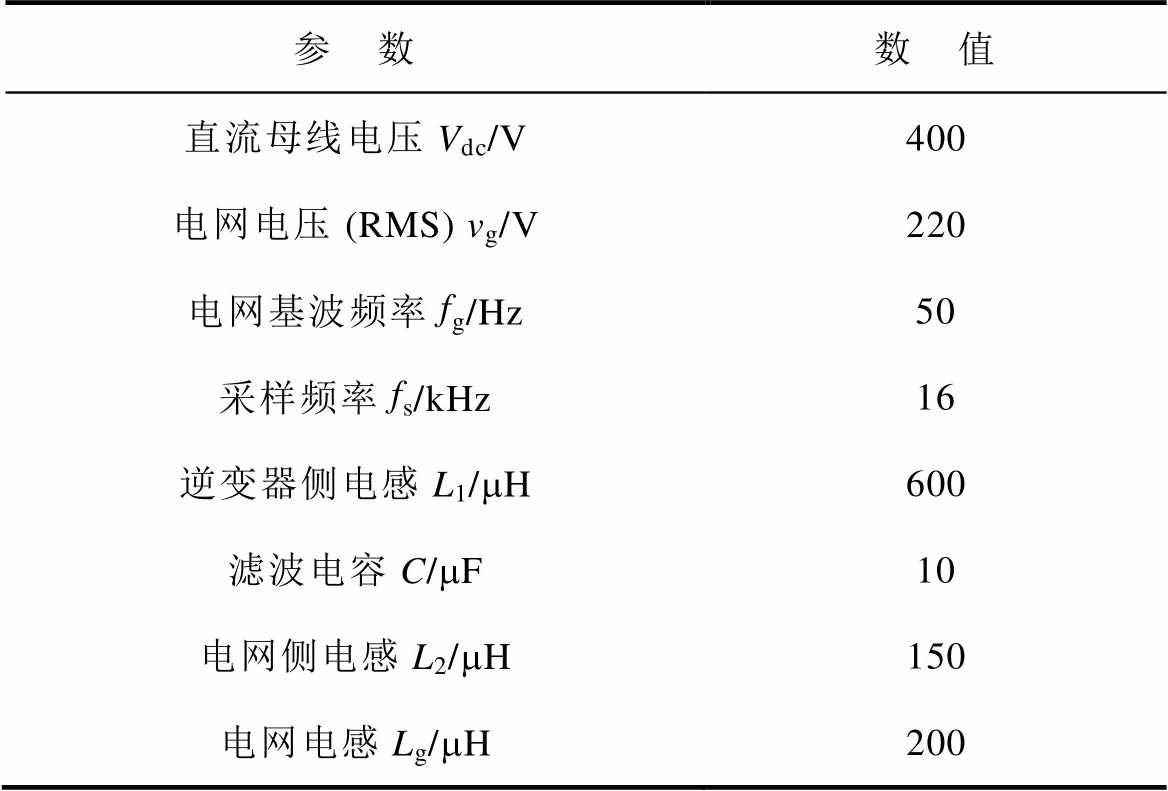
参 数数 值 直流母线电压Vdc/V400 电网电压 (RMS) vg/V220 电网基波频率fg/Hz50 采样频率fs/kHz16 逆变器侧电感L1/mH600 滤波电容C/mF10 电网侧电感L2/mH150 电网电感Lg/mH200
在仿真和实验之前,使用逆变器输出导纳Yc和等效电网导纳Yge的伯德图对系统进行理论稳定性评估。从vC处看到的等效电网导纳Yge=1/(sL2+sLg)。根据基于阻抗的稳定判据,系统外部稳定性的PM可以用Yc与Yge幅频曲线交点处的相位差来表示[20],相位差大于180°时,PM<0,此时系统不稳定。
不同电网电感下的Yge与带有不同RC控制器参数的Yc的伯德图如图8所示。在Lg=0的情况下,无论使用传统一阶Q(z)还是所提三阶Q(z),Yc与Yge幅频曲线交点处的相位差都小于180°,即PM>0,表明系统是稳定的。当Lg增大到200 mH时,使用传统一阶Q(z)和krc=4的Yc与Yge会相交于负实部区域,导致PM<0,此时系统不稳定。为了保证系统的稳定性,需要通过减小krc来消除Yc的负实部区域,当krc减小为1时,PM>0,如图8a所示。代替减小krc,使用所提三阶Q(z)能够完全消除Yc的负实部区域,从而确保无论Lg如何变化PM都大于0,如图8b所示。
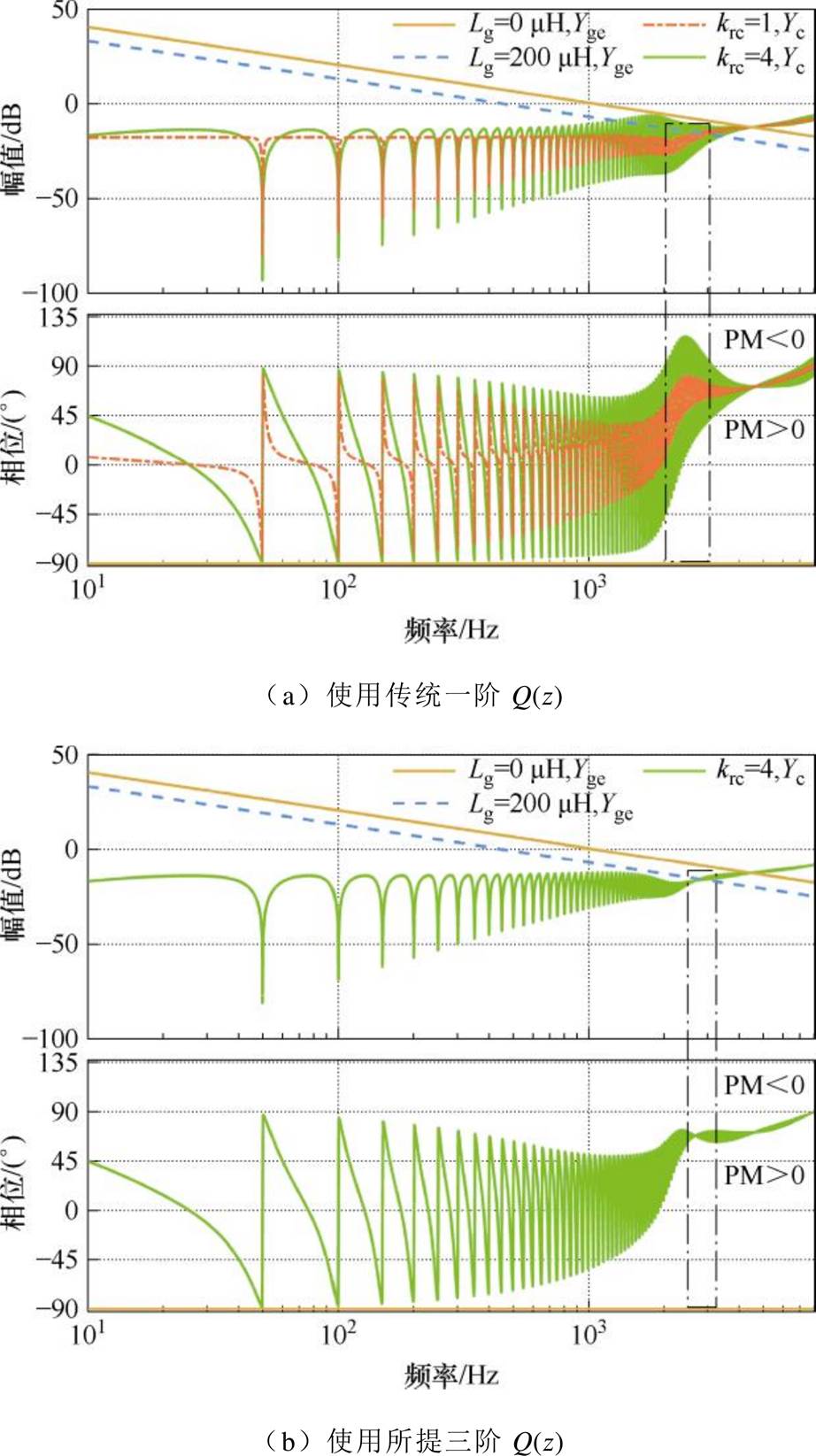
图8 不同Lg的Yge与带有不同krc和Q(z)的Yc的伯德图
Fig.8 Bode diagrams of Ygewith different Lg and Yc with different krc and Q(z)
上述理论分析对应的仿真结果如图9~图11所示。从图9可以看出,在Lg=0 mH的情况下,使用带有一阶Q(z)或三阶Q(z)的PRC时,并网逆变器都能稳定运行,并且可以有效抑制电网电压背景谐波造成的入网电流i2的畸变。如图10所示,在Lg= 200 mH的情况下,使用带有传统一阶Q(z)和krc=1的PRC时,逆变器能够稳定运行。当krc=4时,i2出现发散振荡,表明系统不稳定。当使用所提三阶Q(z)时,即使krc=4,系统仍是稳定的,如图11所示。因此,仿真结果验证了理论分析的正确性和所提方法的有效性。
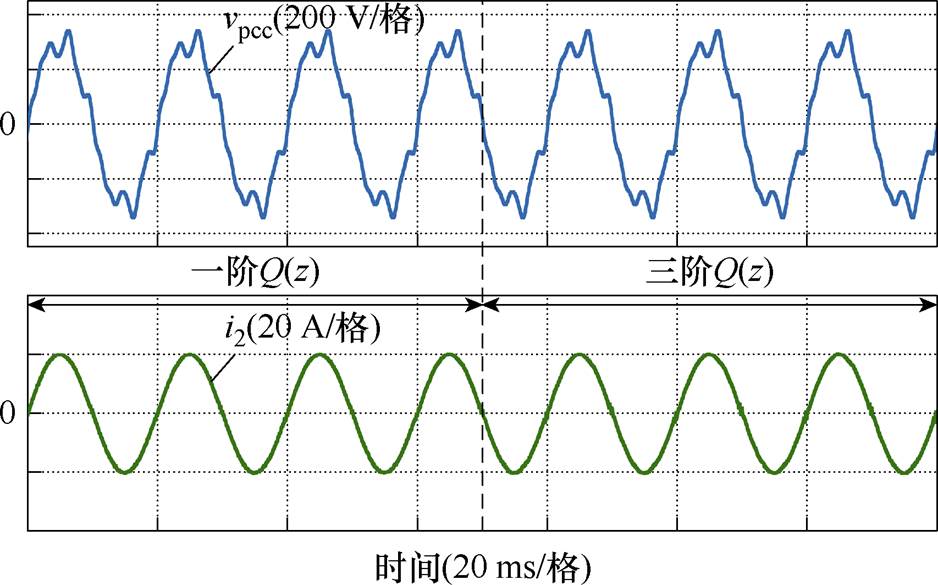
图9 Lg=0 mH时使用不同Q(z)和krc=4的仿真结果
Fig.9 Simulation results with different Q(z) and krc=4 when Lg=0 mH

图10 Lg=200 mH时使用传统一阶Q(z)和不同krc的仿真结果
Fig.10 Simulation results with traditional first-order Q(z) and different krc when Lg=200 mH
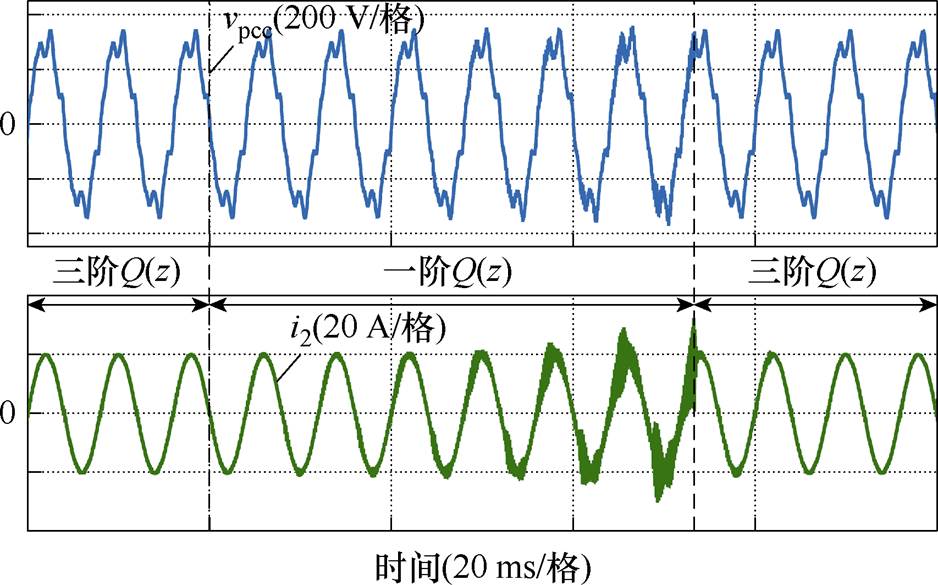
图11 Lg=200 mH时使用不同Q(z)和krc=4的仿真结果
Fig.11 Simulation results with different Q(z) and krc=4 when Lg=200 mH
为了突出所提RC策略的优势,将其与文献[20]中使用的插入式RC控制器进行了仿真对比。插入式RC控制器使用传统一阶Q(z),为了进行公平对比,插入式RC的其他参数根据PRC使用的参数进行折算,且只使用CVF来塑形导纳。在不同电网电感情况下的仿真结果如图12所示,可以看出在零电网电感下,使用插入式RC时系统是稳定的。当Lg变为200 mH时,i2逐渐出现发散振荡,这表明系统不稳定。从图11中可以看出当Lg=200 µH时,使用所提RC策略的并网逆变器系统仍然是稳定的。因此,与插入式RC控制器相比,使用所提三阶Q(z)的PRC对电网阻抗变化具有更强的鲁棒性。
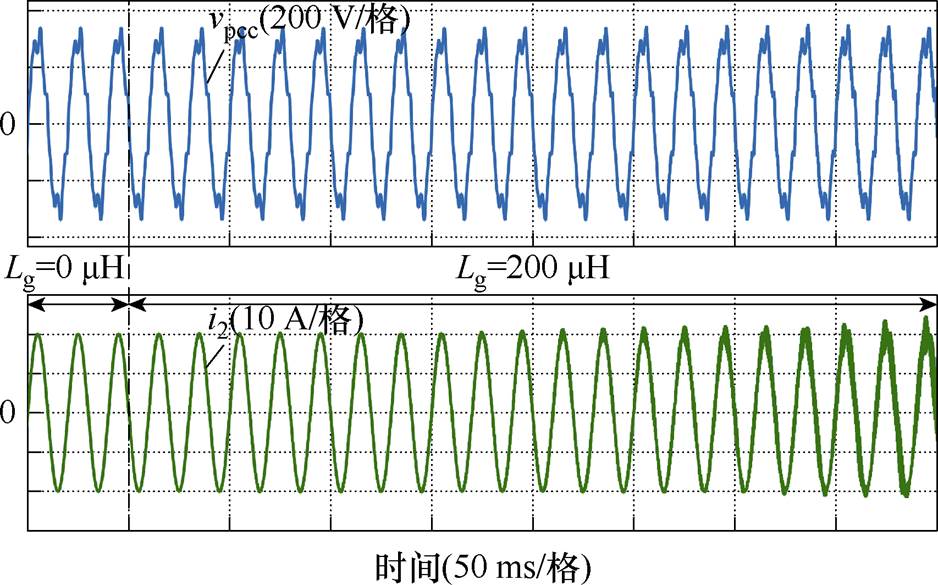
图12 不同电网电感情况下使用插入式RC的仿真结果
Fig.12 Simulation results of using plug-in RC under different grid inductance conditions
为了验证所提RC策略具有良好的动态性能,在电网电压突变的情况下对系统的动态响应进行了仿真测试,仿真结果如图13所示。可以看出在电网电压vg基波突减或突增时,i2都没有发生振荡,而且在两个基波周期后就能恢复到稳态。因此,所提RC策略具有良好的动态性能。
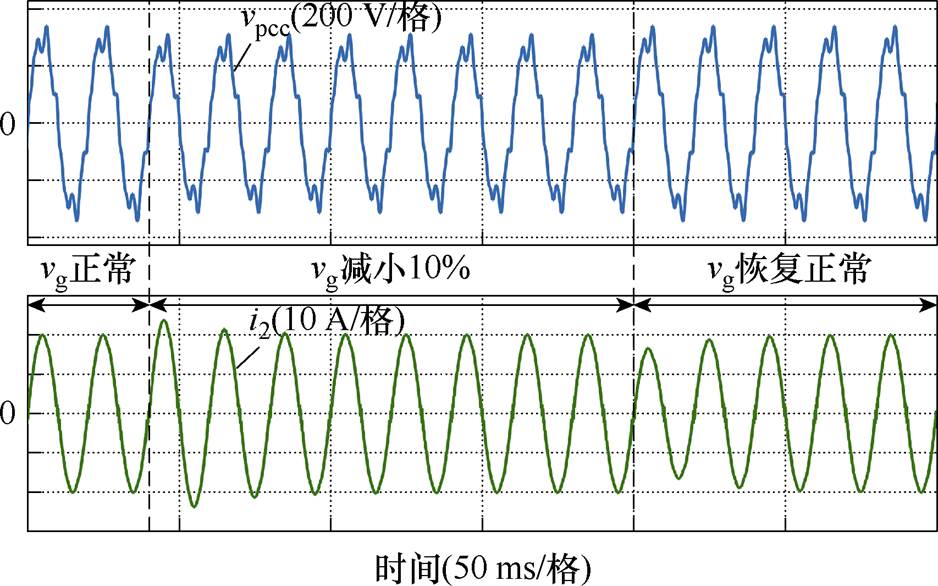
图13 电网电压突变情况下使用所提重复控制策略的仿真结果
Fig.13 Simulation results of using the proposed RC strategy under sudden changes in grid voltage
为了进一步验证所提控制策略的有效性,搭建了如图14所示的并网逆变器实验平台对控制策略进行了测试,实验结果如图15和图16所示。可以看出,在Lg=200 µH的情况下,使用带有传统一阶Q(z)和krc=4的PRC时,逆变器侧电流i1和电网侧电流i2会出现发散的振荡,表明系统不稳定。当krc减小为1时,逆变器能够恢复稳定运行,这是因为减小krc消除了PRC造成的负实部区域,然而减小krc会降低系统的动态性能。使用所提三阶Q(z)时,即使在krc=4的条件下,逆变器仍然能够稳定运行。因此,实验结果与仿真结果相吻合,表明所提三阶Q(z)能够有效消除PRC造成的负实部区域,从而增强系统对电网阻抗变化的鲁棒性。
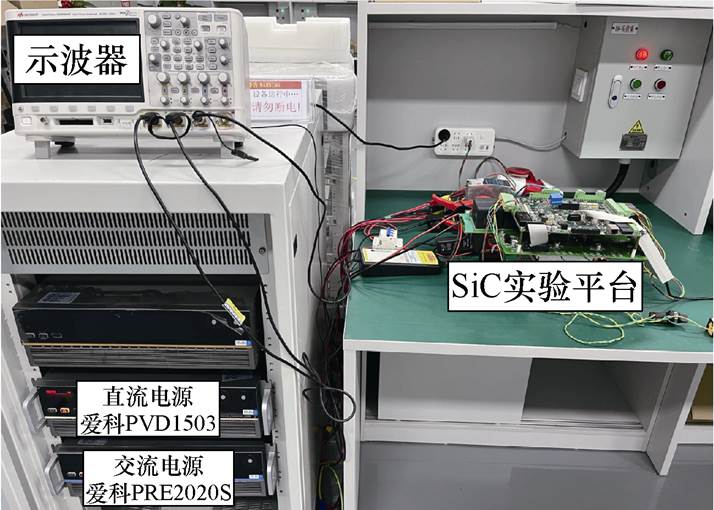
图14 并网逆变器实验平台
Fig.14 Experimental setup of grid-connected inverter
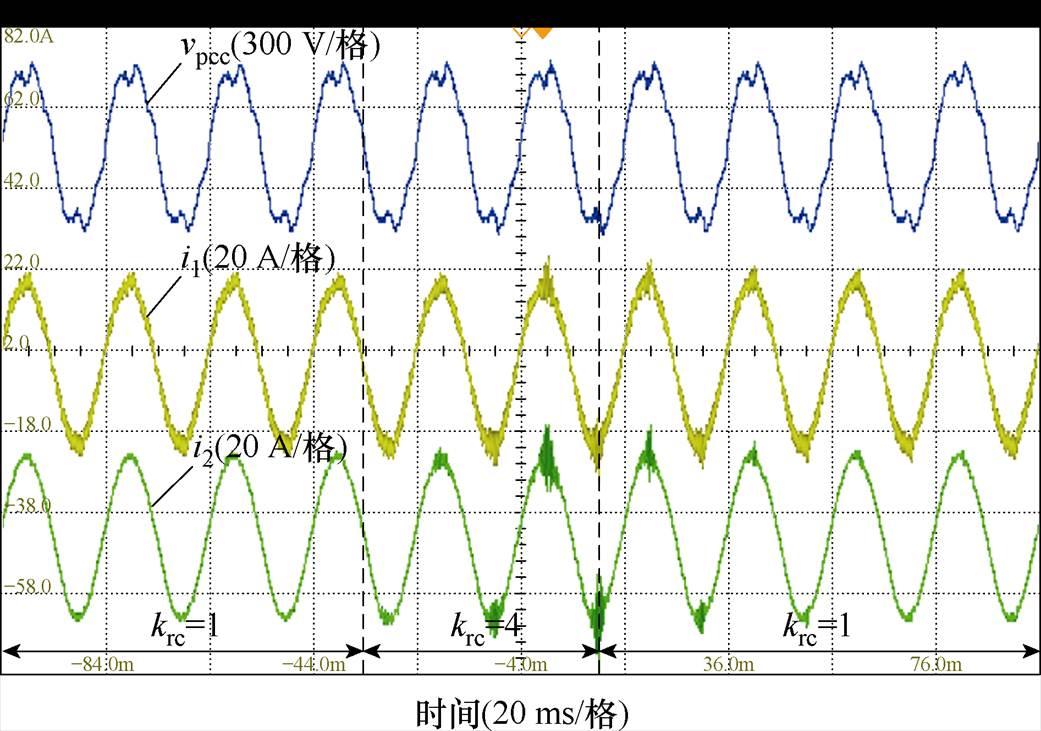
图15 Lg=200 µH时使用传统一阶Q(z)和不同krc的实验结果
Fig.15 Experimental results with traditional first-order Q(z) and different krc when Lg=200 µH
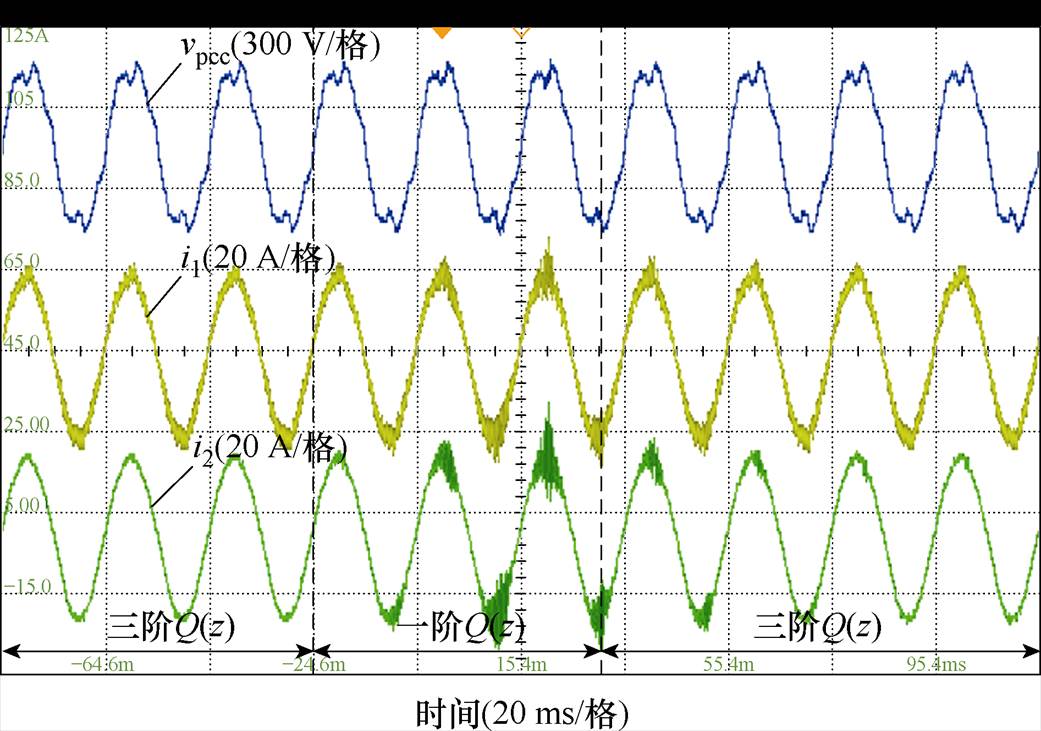
图16 Lg=200 µH时使用不同Q(z)和krc=4的实验结果
Fig.16 Experimental results with different Q(z) and krc=4 when Lg=200 µH
本文建立了LCL型并网逆变器的导纳模型,基于此,分析了PRC对逆变器输出导纳的影响。发现PRC会在谐波频率附近引入负实部的导纳,当电网导纳与逆变器输出导纳相交于负实部区域时,会导致系统不稳定。为了解决此问题,提出了一种基于无源性的重复控制策略。首先设计了一种三阶零相移低通滤波器来修正PRC的内模,进而消除PRC造成的负实部导纳。其次利用CVF方法消除了电网侧电流控制的逆变器输出导纳固有的负实部,所提控制策略实现了一个奈奎斯特频率范围内的无源逆变器输出导纳,从而保证了并网逆变器在任何无源电网阻抗下的稳定性。最后通过仿真和实验结果验证所提重复控制策略不仅能够有效抑制电流谐波,而且对电网阻抗变化具有很强的鲁棒性。
参考文献
[1] 郑嘉龙, 杨鸽, 陈开宇, 等. LCL型多逆变器并网系统谐振研究综述[J]. 电力系统保护与控制, 2022, 50(21): 177-186.
Zheng Jialong, Yang Ge, Chen Kaiyu, et al. An over- view on resonance for a multiple LCL-type inverter grid-connected system[J]. Power System Protection and Control, 2022, 50(21): 177-186.
[2] 王斯然, 吕征宇. LCL型并网逆变器中重复控制方法研究[J]. 中国电机工程学报, 2010, 30(27): 69-75.
Wang Siran, Lü Zhengyu. Research on repetitive control method applied to grid-connected inverter with LCL filter[J]. Proceedings of the CSEE, 2010, 30(27): 69-75.
[3] 朱元, 朱醴亭, 肖明康, 等. 基于几何约束优化的重复控制器及PMSM电流谐波抑制应用[J]. 电工技术学报, 2024, 39(4): 1059-1073.
Zhu Yuan, Zhu Liting, Xiao Mingkang, et al. Repetitive controller based on geometric constraint optimization and its application to current harmonic suppression of PMSM[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 1059-1073.
[4] Yang Yongheng, Zhou Keliang, Wang Huai, et al. Frequency adaptive selective harmonic control for grid-connected inverters[J]. IEEE Transactions on Power Electronics, 2015, 30(7): 3912-3924.
[5] Zhou Keliang, Low K S, Wang D, et al. Zero-phase odd-harmonic repetitive controller for a single-phase PWM inverter[J]. IEEE Transactions on Power Elec- tronics, 2006, 21(1): 193-201.
[6] Escobar G, Hernandez-Briones P G, Torres-Olguin R E, et al. A repetitive-based controller for the com- pensation of 6l±1 harmonic components[C]//2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 2007: 3397-3402.
[7] Zhou Keliang, Wang Danwei, Zhang Bin, et al. Plug- in dual-mode-structure repetitive controller for CVCF PWM inverters[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 784-791.
[8] 卢闻州, 周克亮, 杨云虎. 恒压恒频PWM变换器nk±m次谐波重复控制策略[J]. 电工技术学报, 2011, 26(5): 95-100.
Lu Wenzhou, Zhou Keliang, Yang Yunhu. nk±m order harmonic repetitive controller for CVCF PWM con- verters[J]. Transactions of China Electrotechnical Society, 2011, 26(5): 95-100.
[9] 赵强松, 陈莎莎, 周晓宇, 等. 用于并网逆变器谐波抑制的重复-比例复合控制器分析与设计[J]. 电工技术学报, 2019, 34(24): 5189-5198.
Zhao Qiangsong, Chen Shasha, Zhou Xiaoyu, et al. Analysis and design of combination controller based on repetitive control and proportional control for harmonics suppression of grid-tied inverters[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(24): 5189-5198.
[10] Ye Jie, Liu Linguo, Xu Jinbang, et al. Frequency adaptive proportional-repetitive control for grid- connected inverters[J]. IEEE Transactions on Indu- strial Electronics, 2021, 68(9): 7965-7974.
[11] 张功, 赵强松, 陈赛男, 等. 单相并网逆变器新型奇次谐波重复控制策略[J]. 电力电子技术, 2023, 57(9): 73-78.
Zhang Gong, Zhao Qiangsong, Chen Sainan, et al. Novel odd-harmonic repetitive control scheme for single-phase grid-tied inverters[J]. Power Electronics, 2023, 57(9): 73-78.
[12] 赵强松, 陈昊, 王启帆, 等. 微电网并网逆变器频率自适应前馈双模重复-比例控制[J]. 电工技术学报, 2024, 39(15): 4843-4855.
Zhao Qiangsong, Chen Hao, Wang Qifan, et al. Frequency adaptive feedforward dual-mode repetitive control and proportional control for grid-connected inverters in microgrid[J]. Transactions of China Electrotechnical Society, 2024, 39(15): 4843-4855.
[13] 郭芳琳, 赵麟祥, 寇小霞, 等. 并网逆变器抗网侧频率扰动的自适应重复控制[J]. 电力电子技术, 2023, 57(12): 10-14, 28.
Guo Fanglin, Zhao Linxiang, Kou Xiaoxia, et al. Adaptive repetitive control of grid-connected inverters against frequency disturbance of grid[J]. Power Elec- tronics, 2023, 57(12): 10-14, 28.
[14] Laakso T I, Valimaki V, Karjalainen M, et al. Splitting the unit delay FIR/all pass filters design[J]. IEEE Signal Processing Magazine, 1996, 13(1): 30-60.
[15] Zhao Qiangsong, Chen Sainan, Wen Shengjun, et al. A frequency adaptive PIMR-type repetitive control for a grid-tied inverter[J]. IEEE Access, 2018, 6: 65418-65428.
[16] Zou Zhixiang, Zhou Keliang, Wang Zheng, et al. Frequency-adaptive fractional-order repetitive control of shunt active power filters[J]. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1659-1668.
[17] Liu Pu, Wang Cong, Zhang Yingwei, et al. Frequency adaptive repetitive control of new energy grid- connected inverter based on improved IIR[J]. IEEE Transactions on Power Electronics, 2023, 38(8): 9539-9551.
[18] 刘普, 王聪, 崔艺博, 等. 基于级联结构Thiran滤波器的分数阶双模重复控制[J]. 太阳能学报, 2024, 45(7): 361-368.
Liu Pu, Wang Cong, Cui Yibo, et al. Fractional-order dual-mode repetitive control based on cascaded structure Thiran filter[J]. Acta Energiae Solaris Sinica, 2024, 45(7): 361-368.
[19] Sun Jian. Impedance-based stability criterion for grid- connected inverters[J]. IEEE Transactions on Power Electronics, 2011, 26(11): 3075-3078.
[20] Xie Chuan, Liu Dong, Li Kai, et al. Passivity-based design of repetitive controller for LCL-type grid- connected inverters suitable for microgrid appli- cations[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 2420-2431.
[21] Zhao Ying, Xie Chuan, Peng Chao, et al. Passivity- based design of frequency adaptive repetitive controller for LCL-type grid-connected inverters[J]. IEEE Transactions on Power Electronics, 2024, 39(4): 4017-4028.
[22] 杨明, 杨倬, 李玉龙, 等. 高渗透率下基于并网逆变器阻抗重塑的锁相环设计方法[J]. 电工技术学报, 2024, 39(2): 554-566.
Yang Ming, Yang Zhuo, Li Yulong, et al. A phase- locked loop design method based on impedance remodeling of grid-connected inverter under high permeability[J]. Transactions of China Electrotech- nical Society, 2024, 39(2): 554-566.
[23] Harnefors L, Wang Xiongfei, Yepes A G, et al. Passivity-based stability assessment of grid-connected VSCs: an overview[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2016, 4(1): 116-125.
[24] Xie Chuan, Li Kai, Zou Jianxiao, et al. Passivity- based design of grid-side current-controlled LCL-type grid-connected inverters[J]. IEEE Transactions on Power Electronics, 2020, 35(9): 9813-9823.
Abstract Repetitive controllers (RC) have been widely used in the current control of LCL-type grid- connected inverters due to their ability to achieve zero steady-state error tracking of the fundamental reference signal and harmonic disturbance suppression simultaneously. However, the use of RC can lead to negative real parts in the inverter output admittance near harmonic frequencies, thereby threatening the interconnection stability between the inverter and the grid under weak grid conditions. Although reducing the RC gain can eliminate the negative real part of the admittance, it will reduce the dynamic performance of the system. Therefore, this paper proposes a passivity-based repetitive control strategy that can achieve passive inverter output admittance within the Nyquist frequency range, ensuring system stability under any passive grid impedance conditions.
First, an admittance model of the LCL-type grid-connected inverter with grid-side current control is established. Then, the impact of RC on the real part of the admittance is analyzed, revealing that RC introduces negative-real-part admittances around harmonic frequencies. Although reducing the RC gain can eliminate the negative real part of the admittance near specific harmonic frequencies, there is still a negative real part of the admittance near the frequencies of ws/6 and ws/2. Moreover, the dynamic response of the RC is degraded. Then, a third-order zero-phase-shift low-pass filter is developed. It exhibits stronger high-frequency attenuation capability than the conventional first-order zero-phase-shift low-pass filter. By setting the zero-magnitude frequencies of the filter at ws/6 and ws/2, the negative real part of admittance caused by RC at all harmonic frequencies can be eliminated without reducing the RC gain. Finally, to achieve a passive admittance within the Nyquist frequency range, the inherent negative-real-part admittance of grid-side current-controlled inverters is eliminated using a capacitor voltage feedforward method based on the low-pass filter.
The simulation results show that when the grid inductance Lg=0 mH, the inverter can operate stably and the grid current harmonics are effectively suppressed when using RC with either a first-order or third-order zero-phase-shift low-pass filter Q(z). In the case of Lg=200 mH and using the conventional first-order Q(z), the system remains stable when the RC gain krc=1 but becomes unstable when krc=4. From the admittance Bode diagram, it can be observed that increasing krc introduces negative real parts in the inverter output admittance. At this point, the grid admittance intersects with the inverter output admittance in the negative-real-part region. As a result, a phase margin is less than 0, destabilizing the system. In contrast, when using the developed third-order Q(z), the inverter still operates stably even when krc=4. Thus, the developed third-order Q(z) can eliminate the negative real part of the admittance caused by RC without reducing krc, thereby enhancing the system's robustness against grid impedance variations. The simulation results under grid voltage step changes show that during voltage surges or sags, the grid current exhibits no oscillations and returns to the steady state within two fundamental periods.
An experimental platform of the LCL-type grid-connected inverter is built. The experimental results align with the simulation results, demonstrating that the proposed RC strategy can effectively suppress grid current harmonics and improve the robustness of the inverter system against grid impedance variations.
keywords:LCL type filter, grid-connected inverter, stability, passivity, repetitive control
中图分类号:TM464
DOI: 10.19595/j.cnki.1000-6753.tces.250974
收稿日期 2025-06-06
改稿日期 2025-07-16
刘林国 男,1997年生,博士研究生,研究方向为储能变流器控制等。
E-mail: 1625330811@qq.com(通信作者)
罗 嘉 男,1976年生,高级工程师,硕士研究生,研究方向为储能变流器控制等。
E-mail: jialuo@126.com
(编辑 陈 诚)