 (1)
(1)
摘要 传统的开关磁阻电机预测控制方法存在依赖电机参数或相电流纹波较大等不足。为克服上述问题,该文提出一种开关磁阻电机有源自回归双矢量无模型预测电流控制方法。基于相绕组电压和电流数据建立电机有源自回归模型,并利用归一化最小均方算法对有源自回归模型中的参数向量进行估计,从而获得下一时刻相电流预测值。为了减小相电流纹波,在分析基本电压矢量特点的基础上设计了一种双电压矢量控制策略,优化了双电压矢量的组合方式,基于评价函数最小化原则计算出双电压矢量的时间分配,进而确定最优的双电压矢量组合。在此基础上提出了开关磁阻电机有源自回归双矢量无模型预测电流控制总体架构。搭建实验平台,验证了所提方法既可实现开关磁阻电机的无模型预测电流控制,又可有效降低电流脉动。
关键词:开关磁阻电机(SRM) 有源自回归 双矢量 模型预测电流控制
开关磁阻电机(Switched Reluctance Motor, SRM)具有成本低、容错能力强、转子结构简单、调速范围广、可靠性高以及维修护理简单等优点,在电力传动、电动车辆等领域具有广阔的发展前 景[1-3]。经典的开关磁阻电机控制方法包括高性能转矩控制[4-6]、滑模控制[7-8]和模型预测控制(Model Predictive Control, MPC)等。基于MPC的方法具有结构简单、动态响应快、易处理非线性及易于实现多目标优化等优点,被广泛应用于电机控制领域[9-11]。
近年来,为了优化控制目标,国内外学者致力于SRM预测控制策略研究。预测控制方法通常可分为模型预测控制和无模型预测控制两类。模型预测控制方法中,通过建立SRM的数学模型并结合评价函数实现开关状态选择。根据预测控制目标的不同,可将预测控制策略分为模型预测转矩控制(Model Predictive Torque Control, MPTC)策略[12-13]和模型预测电流控制(Model Predictive Current Control, MPCC)策略[14-15]。文献[16]提出将占空比计算前置至评价函数之前的转矩预测控制方法,并在转矩、磁链预测中引入反馈补偿,该方法结合优化后的电压矢量占空比和补偿量选出下一时刻的最优电压矢量及占空比,有效地抑制了转矩脉动。文献[17]提出了一种优化候选电压的转矩预测控制方法,通过优化电机换相区与控制周期中的候选电压矢量,提高了转矩电流比。文献[18]提出一种改进型双周期的模型预测电流控制策略,通过构建包含两个时刻电流预测值的成本函数,使相邻周期选择相同的最优电压矢量,有效降低了开关频率。但未考虑电机模型与参数对电流预测精度的影响,基于电机模型的预测控制方法易受电机参数的影响,导致控制性能下降,影响控制策略的鲁棒性。
为了避免对电机模型和参数的依赖,无模型预测控制(Model Free Predictive Control, MFPC)策略逐渐成为研究热点之一[19-20]。由于SRM的相转矩是电流和转子位置的函数,因此其获得方式通常需要电机的参数或模型[21]。为了避免无模型预测控制策略中引入电机参数或者电机模型,SRM的MFPC策略主要集中在无模型预测电流控制(Model Free Predictive Current Control, MFPCC)方面。文献[22]提出了一种基于电流差分特性的SRM无模型预测电流控制策略,考虑控制延时和停滞电流差分的影响,提出了一种新的电流差分更新方法,有效消除了电流更新停滞现象,实现了SRM无模型预测电流控制。文献[23]借助扩张状态观测器,对永磁同步电机超局部模型的未知扰动进行在线估计,减少了控制参数数量,提高了低采样频率下控制策略的稳态和动态性能。但上述方法中未考虑相电流脉动问题,控制策略需要改进。文献[24]提出了一种可变开关点无模型预测电流控制策略,通过改变开关状态切换点在一定程度上降低了相电流纹波,但相电流纹波抑制程度有限,控制策略需要进一步提升。
为克服上述不足,该文提出了一种SRM有源自回归双矢量无模型预测电流控制策略。首先,基于相电压和相电流数据利用自回归理论建立了SRM的自回归模型,并采用改进的归一化最小均方(Least Mean Square, LMS)算法对自回归模型中的参数向量进行估计,进而实现下一时刻相电流预测。然后,为减小相电流脉动,提出了一种基于双电压矢量的开关状态选择方法,并通过设计最小化评价函数计算出双矢量作用时间,结合双矢量组合原则选择出最优双矢量组合。最后,搭建了实验平台,验证了提出方法的有效性和可行性。
有源自回归(Auto-Regressive with Exogenous Input, ARX)函数利用历史数据与当前数据的关系对未来时刻进行电流预测,自回归函数表达式为
(1)
式中,n、m为ARX函数的阶数;a1、a2、…、an与b1、b2、…、bm为待估计的未知系数;y(k-1)、y(k-2)、…、y(k-n)和u(k-1)、u(k-2)、…、u(k-m)为系统的输入;y(k)为系统的输出。
为实现相电流预测,将SRM相电流估计值作为系统输出,相电流和相电压数据作为系统输入,可得
 (2)
(2)
式中, 为相电流估计值;i(k-1)、U(k-1)分别为
为相电流估计值;i(k-1)、U(k-1)分别为
k-1时刻的相电流和相电压;i(k-n)为k-n时刻的相电流;U(k-m)为k-m时刻的相电压。
将式(2)中未知系数汇集到参数向量q(k)中,系统输入量和输出量汇集到回归向量j(k)中,分别可得
 (3)
(3)
 (4)
(4)
结合式(2)~式(4)可得
 (5)
(5)
结合式(2)和式(5)可得k+1时刻的预测相电流表达式为
 (6)
(6)
式中, 为k+1时刻的相电流预测值;jT(k+1)为k+1时刻的回归向量。
为k+1时刻的相电流预测值;jT(k+1)为k+1时刻的回归向量。
基于式(6),当参数向量q(k)确定后,便可根据相电流和相电压数据计算出下一时刻的相电流预测值,参数向量q(k)的准确性对于预测相电流精度十分重要,因此采用改进归一化最小均方算法对参数q(k)进行实时估计。
最小均方算法的输出量是输入量的线性加权叠加,期望输出量与实际输出量之间的误差以迭代方式不断接近最优权重系数。结合式(2)~式(4)可得
 (7)
(7)
式中,q(k)为未知权重系数;j(k)为系统的已知输入量;y(k)为。
期望的输出量为
 (8)
(8)
式中,d(k)为k时刻的期望输出量;i(k)为k时刻的实际相电流。
误差e(k)表示期望输出d(k)与输出量y(k)之间的误差,可表示为
 (9)
(9)
式中,e(k)为k时刻的输出误差。
结合式(7)与式(9)可得
 (10)
(10)
基于最小化均方误差准则建立代价函数为
 (11)
(11)
式中,E{ · }表示期望运算。
结合式(10)和式(11)可得
 (12)
(12)
利用最速下降法更新参数向量q(k),即q(k)沿着代价函数负梯度方向进行更新,可得
 (13)
(13)
式中,m为步长;q(k-1)为k-1时刻的参数向量;ÑJ(q)为代价函数的梯度。
因代价函数梯度难以获得,故采用均方误差准则的估计梯度来代替,式(12)中对参数向量q(k)求微分可得
 (14)
(14)
结合式(13)和式(14)可得
 (15)
(15)
由式(15)可以看出,LMS算法中固定步长m影响着LMS算法的收敛速度及收敛后的稳态误差,因此利用最小扰动原理对LMS算法进行改进。
依据最小扰动原理可得,设计准则为最小化参数向量变化量且更新后输出误差为零,可得
 (16)
(16)
利用拉格朗日乘子法对式(16)改写,可得
 (17)
(17)
式中,l为拉格朗日乘子。
令式(17)一阶导数为零,可得
 (18)
(18)
式(18)移项可得
 (19)
(19)
结合式(16)和式(19)可得
 (20)
(20)
由式(20)可得
 (21)
(21)
结合式(19)和式(21)可得参数向量以最小方式改变的最优解为
 (22)
(22)
为防止参数向量增量赋值过大,引入控制步长常数a对其进行控制,式(22)可改写为
 (23)
(23)
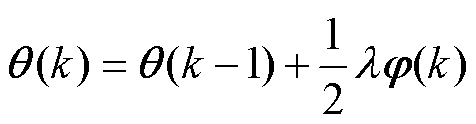
将自回归模型预测电流式(6)和归一化最小均方算法参数识别式(23)结合可得基于有源自回归模型的相电流预测方法,其预测框图如图1所示。控制方法中电机电流和电压通过延迟环节得到ARX函数结构,通过归一化最小均方(Normalized Least Mean Square, NLMS)算法对ARX函数中参数向量q(k)进行识别,确定系统的输入和输出之间的关系对未来时刻的电流进行预测。
图1 基于ARX函数的相电流预测框图
Fig.1 Block diagram of phase current prediction based on ARX function
功率变换器的拓扑结构为三相不对称半桥型功率变换器拓扑结构,如图2a所示。其中,VD1~VD6为续流二极管,S1~S6为功率三极管,Udc为直流电压,A、B和C为电机的三相绕组。SRM不对称半桥型功率变换器各相桥臂主要包括励磁、零电压续流和负电压去磁三种工作模式[23]。图2b中,“S=1”表示正电压励磁模式;图2c中,“S=0”表示零电压续流模式;图2d中,“S=-1”表示负电压去磁模式。
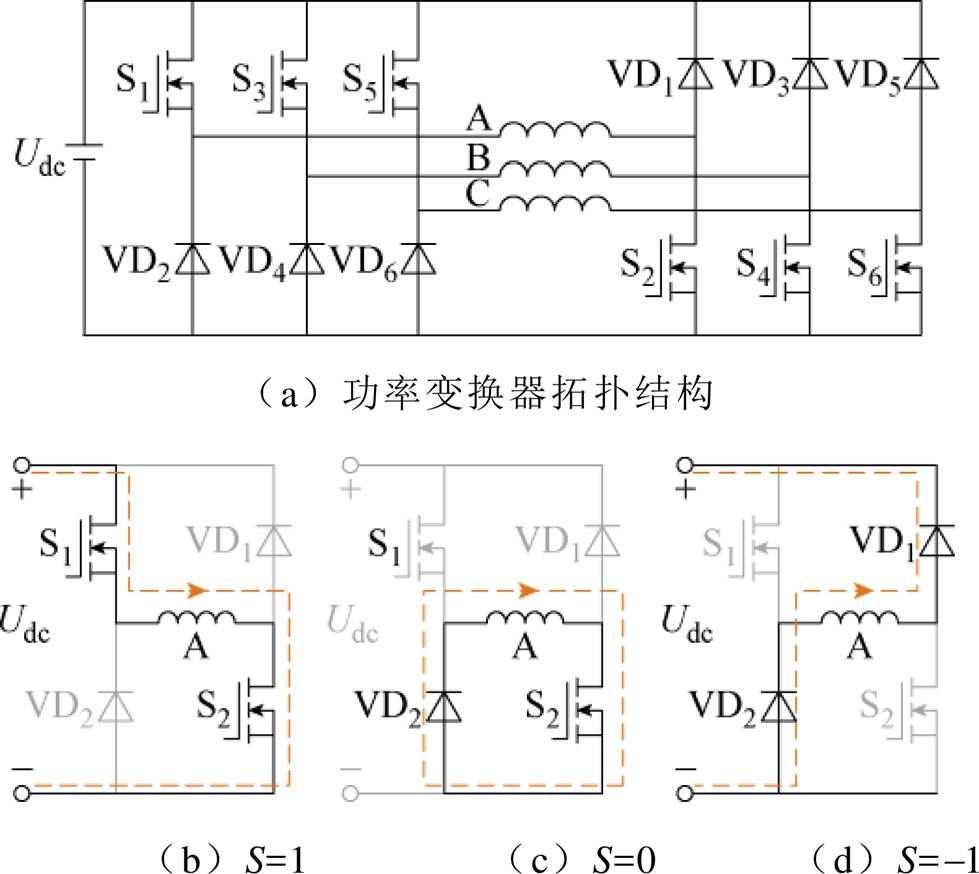
图2 不对称半桥功率变换器拓扑及工作模式
Fig.2 Asymmetric half-bridge power converter and working modes
利用式(23)可求解出k时刻的参数向量q(k),代入式(6)中便可以求出不同电压矢量下的电流预测值为
 (24)
(24)
式中, 和
和 分别为k+1时刻开关状态为1和0时的电流预测值;
分别为k+1时刻开关状态为1和0时的电流预测值; 和
和 分别为k+1时刻开关状态为1和0时的回归向量。
分别为k+1时刻开关状态为1和0时的回归向量。
图3为双矢量组合下相电流的变化过程。图中,iref为参考电流,r1和r2为不同开关状态下的相电流斜率,ton、ton1分别是k到k+1时刻、k+1到k+2时刻两个控制周期内第一个电压矢量作用时间,i(k+ton)为k+ton时刻的相电流,i(k+1)为传统MFPCC策略下得到的k+1时刻的相电流预测值,iDV(k+1)为双矢量无模型预测电流控制(Dual-Vector Model-Free Predictive Current Control, DV-MFPCC)策略下得到的k+1时刻相电流预测值;U(k)|S=1为k时刻开关状态为1时的电压矢量,U(k+1)|S=0为k+1时刻开关状态为0时的电压矢量,U(k+ton)|S=0为k+ton时刻开关状态为0时的电压矢量。
从图3中可以看出,传统MFPCC策略在k到k+1控制周期内用最优单电压矢量U(k)|S=1得到i(k+1),并在k+1到k+2时刻再次将最优单电压矢量U(k+1)|S=0作用在整个控制周期,导致较大的电流脉动。而DV-MFPCC策略在k到k+1时刻利用最优电压矢量组合实现在控制周期内进行开关状态切换,最终得到的iDV(k+1)更接近参考电流,并且在k+1到k+2时刻内再次应用双矢量组合。可以看出,DV-MFPCC的电流脉动更小。DV-MFPCC策略与传统MFPCC策略相比,电流脉动明显降低,使得实际电流更好地跟随参考电流,提高控制策略性能。
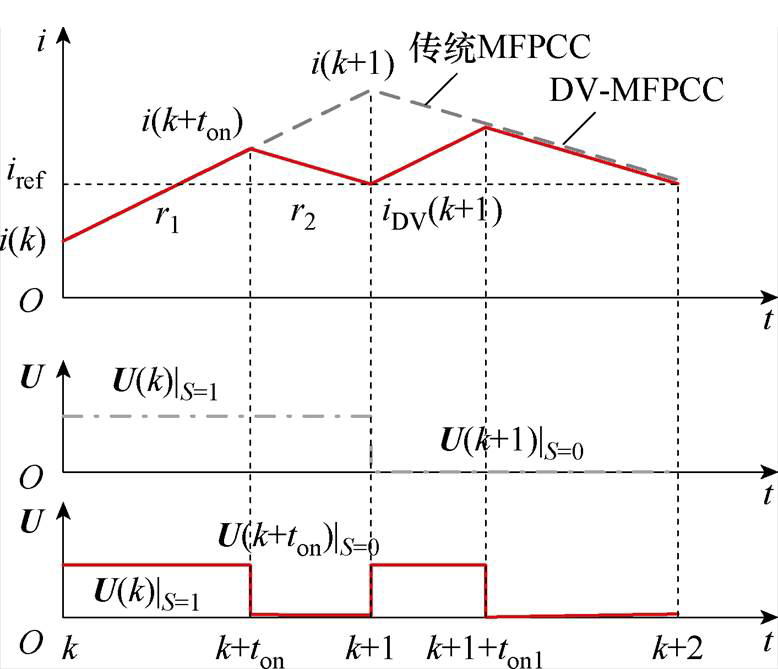
图3 DV-MFPCC原理
Fig.3 Schematic diagram of DV-MFPCC
在一个控制周期中,双矢量组合共有两种情况,如图4所示。为描述方便,k至k+ton时间对应的矢量为第一个电压矢量,k+ton至k+1时间对应的矢量为第二个电压矢量。在图4a中,第一个电压矢量选择“S=1”,第二个电压矢量选择“S=0”,即在一个控制周期内电流先上升后下降。在图4b中,第一个电压矢量选择“S=0”,第二个电压矢量选择“S=1”,即在一个控制周期内电流先下降后上升。考虑单一控制周期中两种方式均可以有效抑制电流脉动。
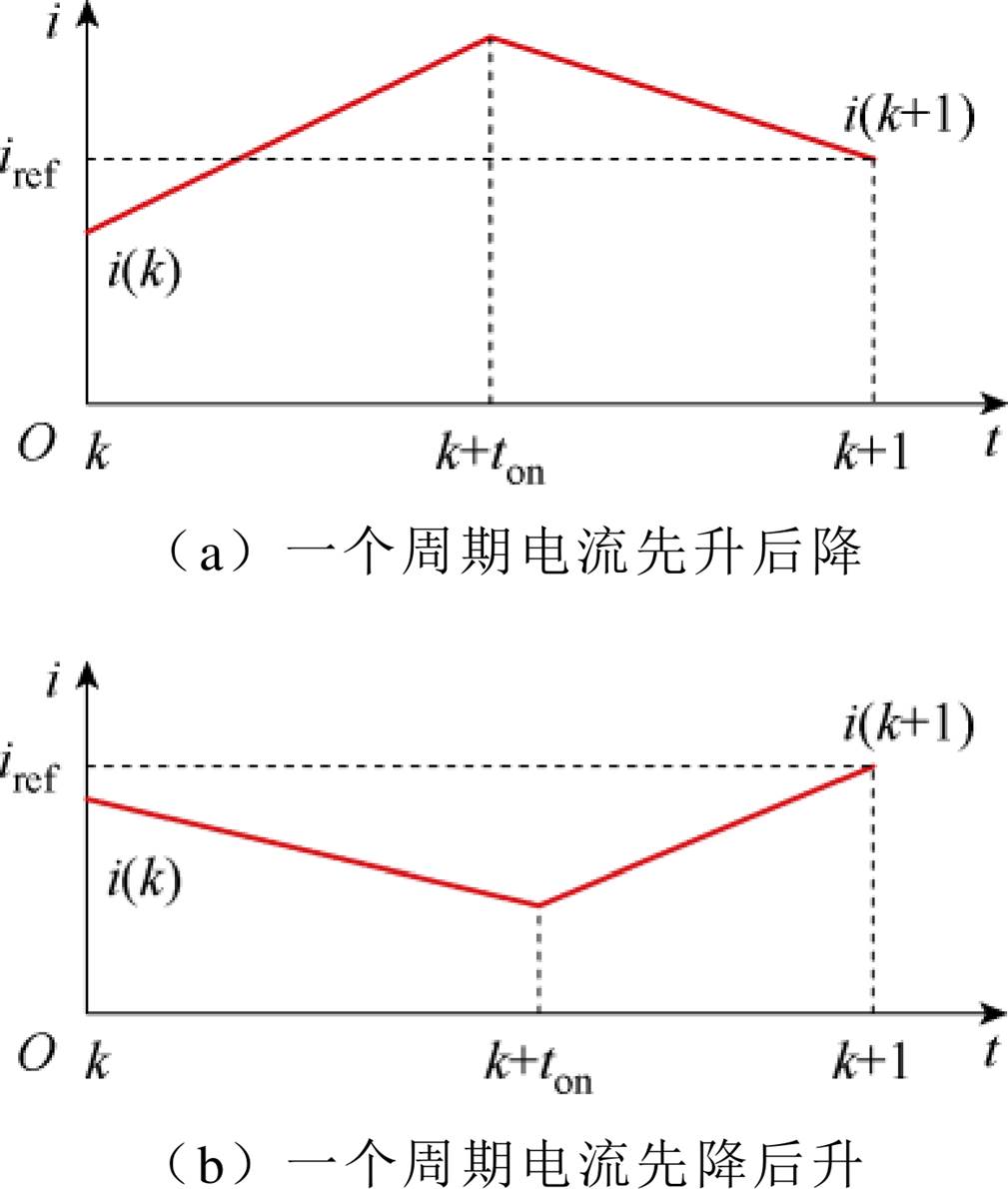
图4 单控制周期双矢量组合情况
Fig.4 Double vector combination in single control period
考虑相邻控制周期电流脉动,双矢量选择需要特殊考虑,如图5所示。图5a和图5b分别给出了相邻两个控制周期双矢量组合示例。图5a中电流在第一个控制周期内先增后减,而在第二个控制周期内电流先减后增,该双矢量组合使电流可以很好地跟随参考电流,但由于第二控制周期内电流先减后增,在k+1时刻应用的电压矢量与上一个控制周期第二个电压矢量相同,导致电流脉动相对较大。图5b中电流在第一个控制周期内先增后减,在第二个控制周期内先增后减,该双矢量组合也可达到跟随参考电流的效果,且由于在第二个控制周期内采用的第一个电压矢量与第一个控制周期内采用的第二个电压矢量相反,相较于图5a,该双矢量组合方式拥有更小的电流脉动。
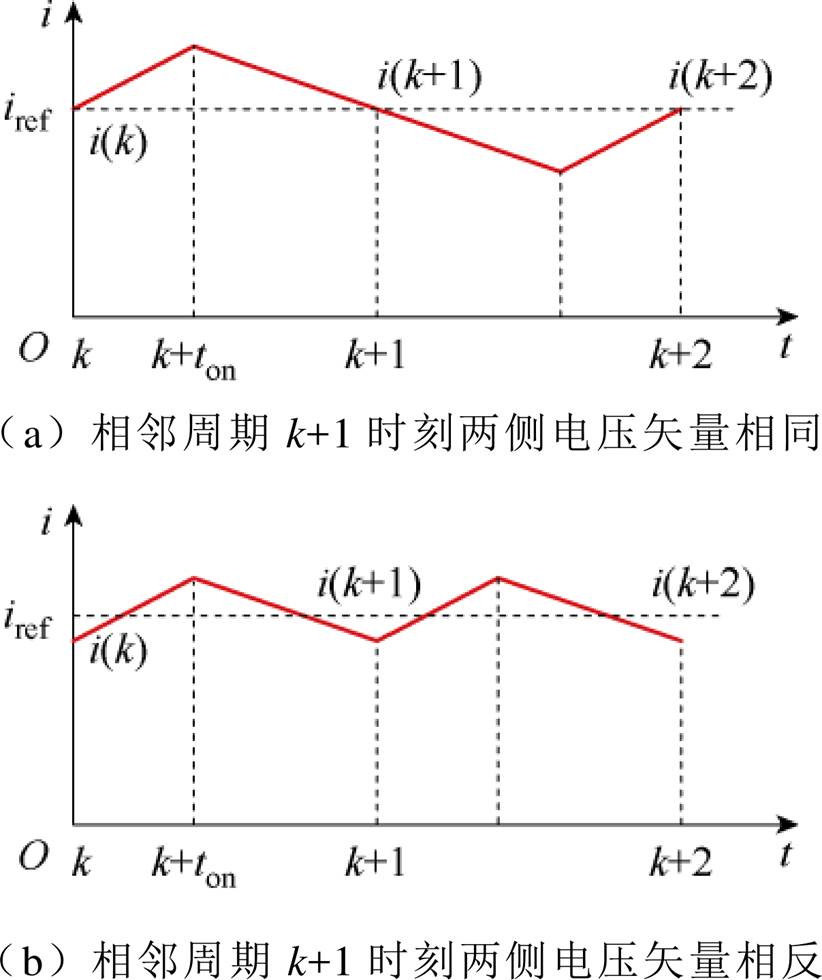
图5 相邻控制周期双矢量组合情况
Fig.5 Double vector combination in adjacent control period
基于上述分析,提出一种双矢量组合原则:在DV-MFPCC策略选择最优双矢量组合时,结合上一个控制周期的第二个电压矢量进行判断,即在第二个控制周期内选择的第一个电压矢量需与上一个控制周期的第二个电压矢量相反,该组合原则在跟踪参考电流的同时减小电流脉动。
SRM功率变换器在电流预测控制中仅考虑“S=1”和“S=0”两种工作模式,分别对两种工作模式下的电流变化率进行求解。不同工作模式下电流变化率rj为
 (25)
(25)
式中, 为S=j工作模式下k+1时刻的电流
为S=j工作模式下k+1时刻的电流
预测值,其中j取0或1;Ts为控制周期。
结合式(25)可得k+ton时刻和k+1时刻的电流预测值分别为
 (26)
(26)
 (27)
(27)
式中, 、分别为k+ton时刻、k+1时刻的电流预测值;rj1、rj2分别为第一个电压矢量、
、分别为k+ton时刻、k+1时刻的电流预测值;rj1、rj2分别为第一个电压矢量、
第二个电压矢量作用下的电流斜率;Ts-ton为第二个电压矢量的作用时间。
为实现对参考电流的准确跟踪,设计DV- MFPCC策略的评价函数为
 (28)
(28)
为使电流误差最小,将式(28)最小化来求解ton,即令式(28)对ton的偏导数为零,即
 (29)
(29)
结合式(26)~式(29)可得
 (30)
(30)
对式(30)变换可得
 (31)
(31)
求解式(31)可得第一个电压矢量作用时间ton为
 (32)
(32)
根据式(32)计算得到的第一个电压矢量作用时间ton,与双矢量组合原则结合,选择正确的电压矢量组合以及双电压矢量的分配时间。
当ton≤0时,令ton=0,第一个电压矢量作用时间为0,第二个电压矢量作用时间为Ts;当ton≥Ts时,令ton=Ts,第一个电压矢量作用时间为Ts,第二个电压矢量作用时间为0。此时与传统MFPCC策略一致,计算出所有可能的电压矢量作用整个控制周期下的电流预测值,通过评价函数选择最优电压矢量。
当0<ton<Ts时,开关状态选择为双矢量模式,即根据双矢量组合原则,结合上一个控制周期应用的电压矢量对当前周期的双矢量组合进行选择。当上个控制周期应用电压矢量为单电压矢量时,当前周期的第一个电压矢量需选择与上个周期相反的电压矢量;当上个控制周期应用电压矢量为双电压矢量组合时,当前周期选择的第一个电压矢量需要与上个周期的第二个电压矢量相反。具体流程如图6所示。
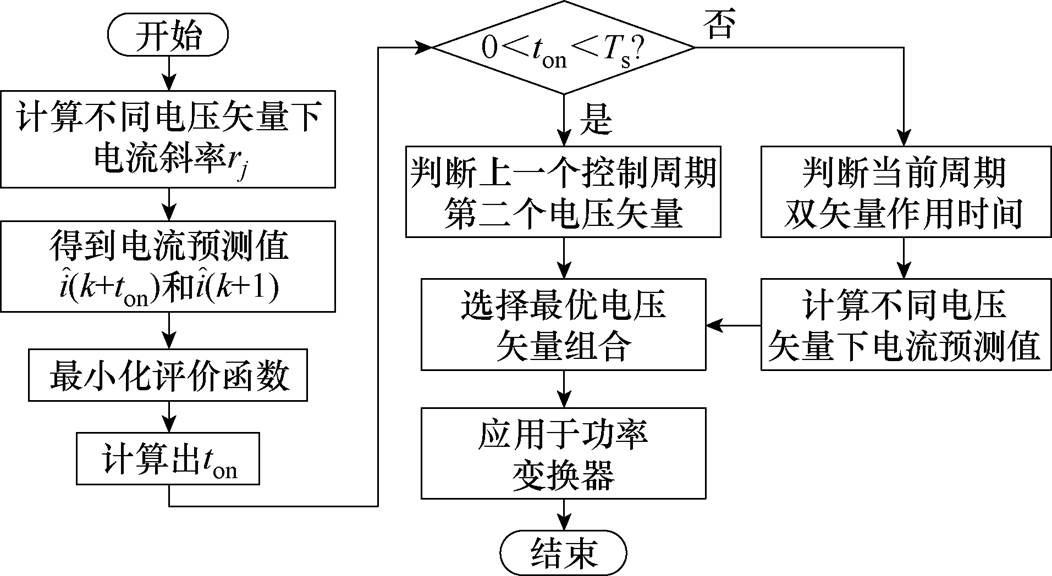
图6 双矢量组合选择流程
Fig.6 Flow chart of dual-vector selection
基于有源自回归理论获得相电流预测值,结合双矢量组合原则优化选择开关状态,进而得到SRM有源自回归双矢量无模型预测电流控制(Dual Vector Model Free Predictive Current Control based on ARX Function, DV-MFPCC-ARX)策略,结构如图7所示。图7中,左侧矢量图用于表示电机不同转子区域开关状态选择情况。当各相绕组分别处于开通角和关断角之间时,根据评价函数结合“S=1”和“S=0”两种工作状态进行计算选择;当各相绕组分别处于关断区间时,则工作状态选择为“S=-1”。
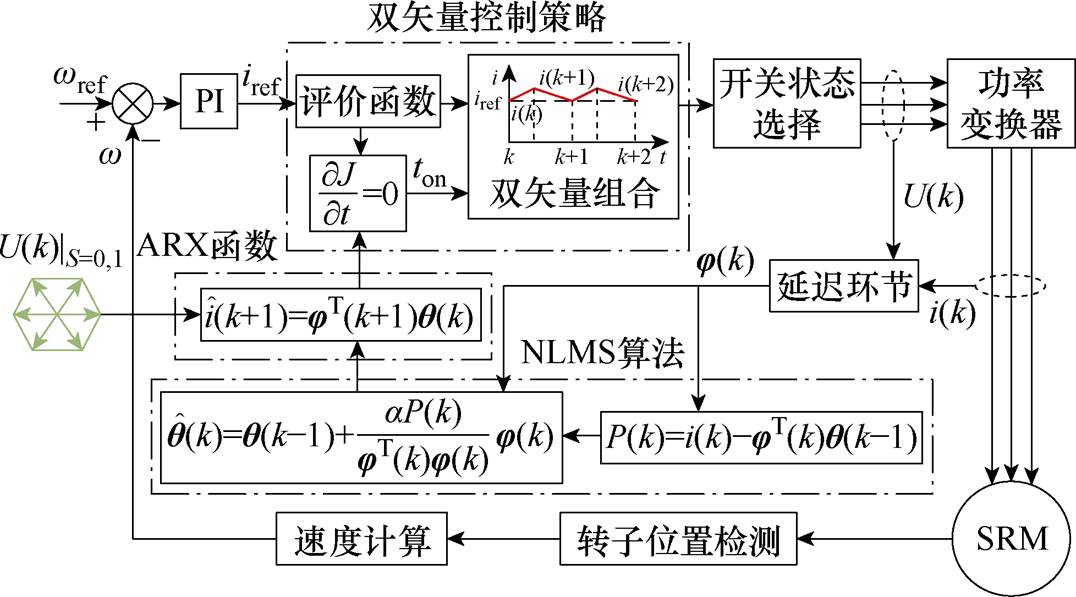
图7 DV-MFPCC-ARX控制策略结构
Fig.7 Structure diagram of DV-MFPCC-ARX strategy
DV-MFPCC-ARX策略采用双闭环控制方式,转速外环将参考转速与实际转速作差后,经过PI控制器得到参考电流;电流内环,将电流和电压的历史数据构成输入向量j(k),并输入NLMS算法中得到参数向量q(k)估计值,将其代入ARX函数中计算出相应电压矢量下的下一时刻的电流预测值;通过最小化评价函数计算双矢量组合的作用时间并对其进行判断,结合双矢量组合原则选择出最优双矢量组合,双矢量的应用降低了电流脉动。最后生成开关信号控制功率变换器的开关状态,实现SRM的无模型预测电流控制。
图8为搭建的三相12/8结构SRM驱动系统实验平台。功率变换器的拓扑结构为不对称半桥型。数字控制器芯片型号为TI公司的TMS320F28335。控制方法分别选取基于ARX函数的无模型预测电流控制(Model Free Predictive Current Control Based on ARX function, MFPCC-ARX)策略、双矢量模型预测电流控制(Dual Vector Model Predictive Current Control, DV-MPCC)策略和DV-MFPCC-ARX策略。开关磁阻电机的关键参数见表1。
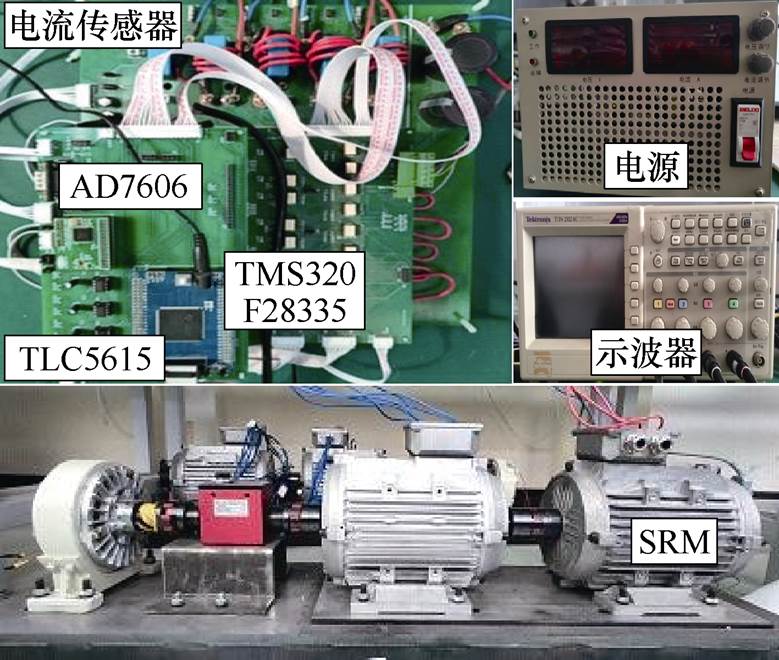
图8 SRM驱动系统实验平台
Fig.8 Experimental system of SRM drive
表1 测试SRM关键参数
Tab.1 Key parameters of the tested SRM

参 数数 值 相绕组数3 定子极数12 转子极数8 相电阻/W0.3 额定转速/(r/min)2 000 额定功率/W1 000 供电电压/V48 额定负载/(N∙m)4.8
电机参考转速为600 r/min,负载转矩为0.5 N∙m轻载工况下三相电流和A相的预测电流实验波形如图9所示。对比图9a~图9c可以看出,基于MFPCC- ARX策略的A相最大电流纹波为6.0 A;DV-MPCC策略的A相最大电流纹波为3.7 A;DV-MFPCC- ARX策略的A相最大电流纹波为3.6 A。图10为额定负载转矩下三相电流和A相预测电流实验波形。对比图10a~图10c可知,采用MFPCC-ARX策略时A相最大电流纹波为7.4 A;采用DV-MPCC策略时A相最大电流纹波为5.6 A;采用DV-MFPCC- ARX策略时A相最大电流纹波为5.3 A。由图9和图10可以得到,双矢量控制策略的相电流纹波小于单矢量控制策略的电流纹波,双矢量控制策略能够有效降低电流纹波。
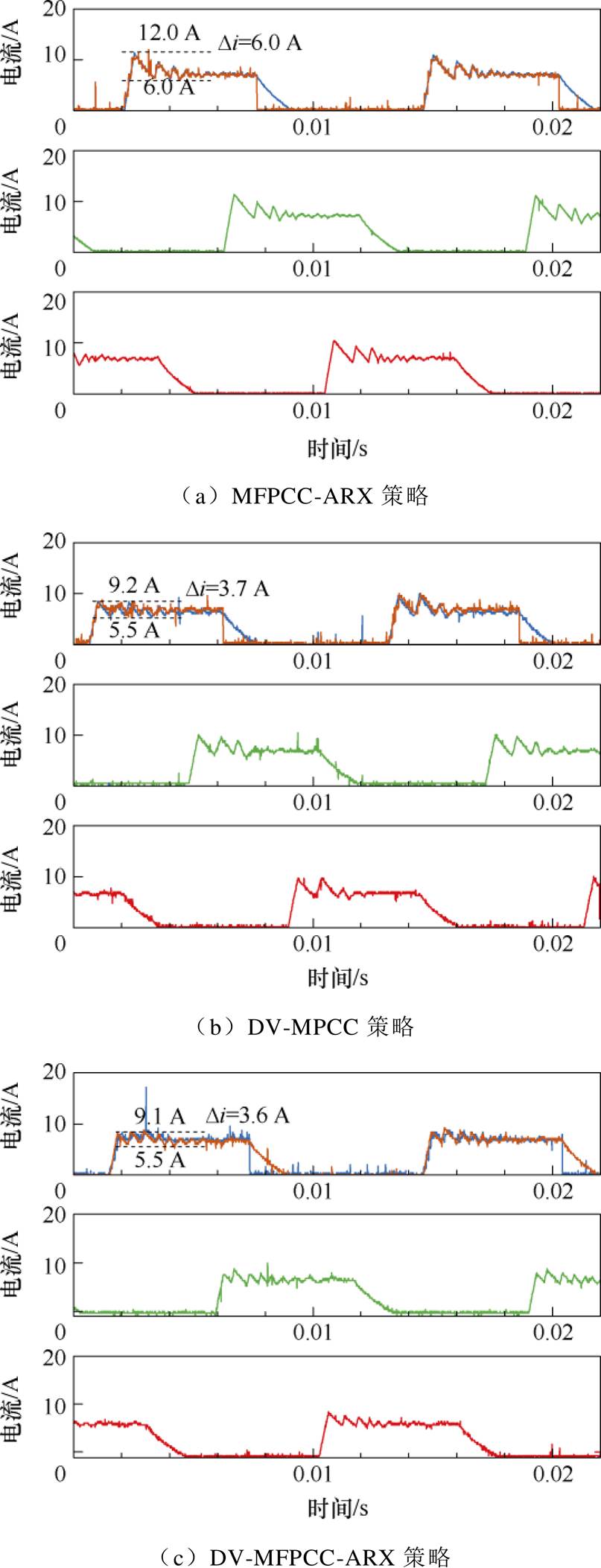
图9 轻载工况下三相电流和A相预测电流实验波形
Fig.9 Experimental waveforms of three phase currents and the predicted current of phase A with light load torque
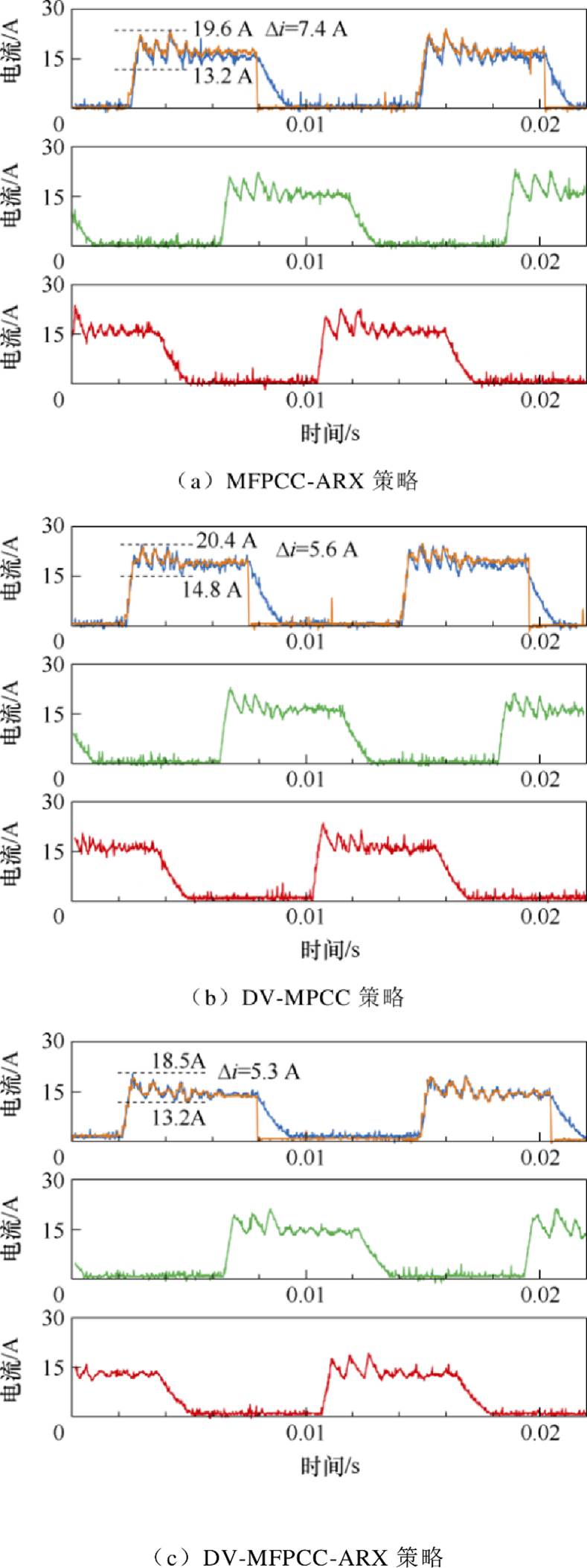
图10 额定负载下三相电流和A相预测电流实验波形
Fig.10 Experimental waveforms of three phase currents and the predicted current of phase A with rated load torque
电机负载转矩为0.5 N∙m,参考转速由600 r/min变化为1 000 r/min的轻载加速工况下A相电流和转速实验波形如图11所示。对比图11a~图11c可以看出,基于MFPCC-ARX策略的动态加速时间为0.48 s;DV-MPCC策略的动态加速时间为0.55 s;DV-MFPCC-ARX策略的动态加速时间为0.45 s。图12为额定负载下参考转速由600 r/min变化为1 000 r/min工况下A相电流和转速实验波形。对比图12a~图12c可以看出,基于MFPCC-ARX策略的动态加速时间为0.49 s;DV-MPCC策略的动态加速时间为0.60 s;DV-MFPCC-ARX策略的动态加速时间为0.43 s。由图11和图12可以得到,DV- MFPCC-ARX策略具有更好的动态性能。
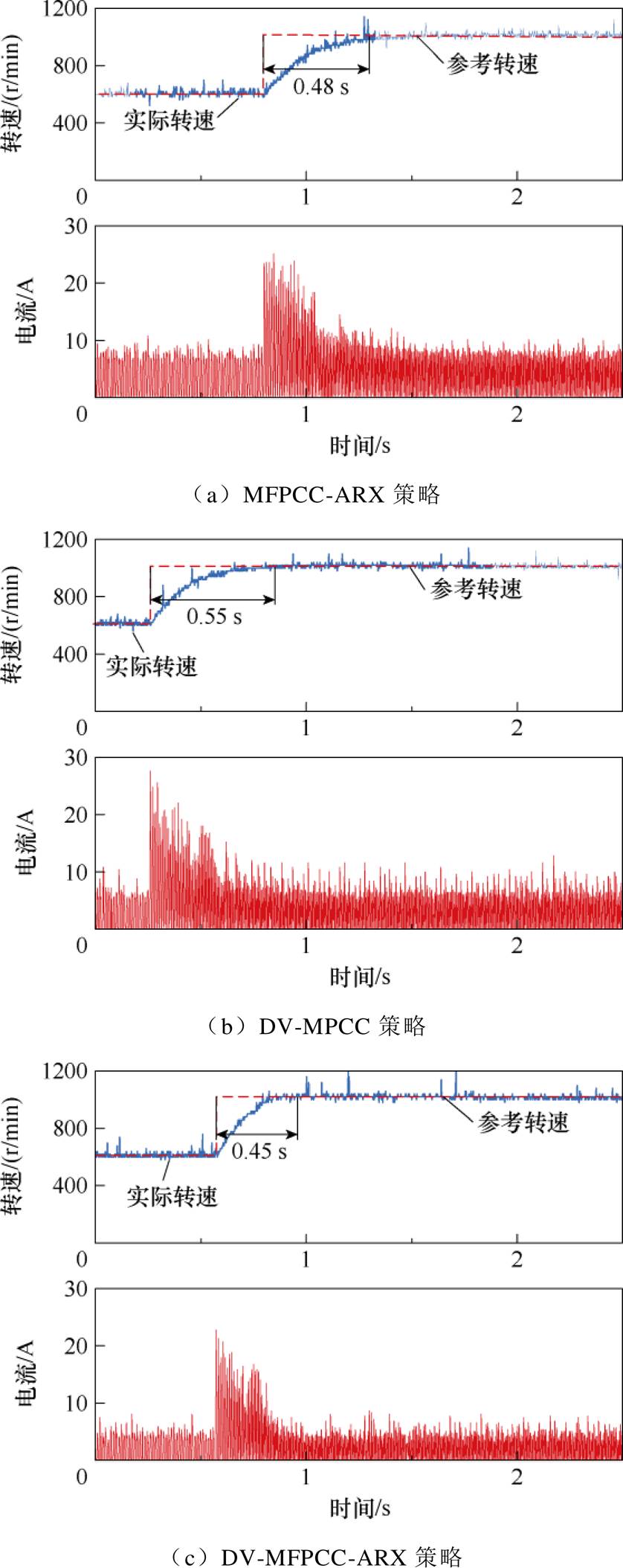
图11 轻载下A相电流和转速实验波形
Fig.11 Experimental waveforms of phase A current and motor speed with light load torque
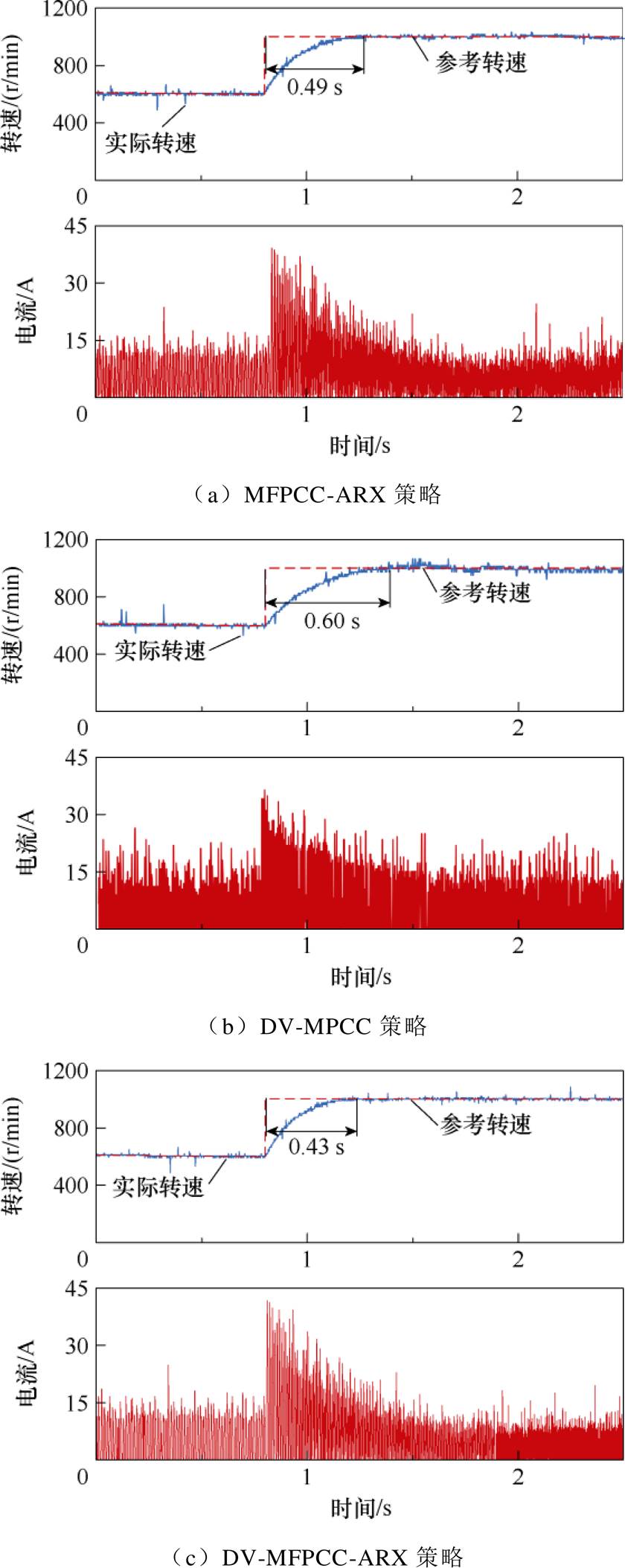
图12 额定负载下A相电流和转速实验波形
Fig.12 Experimental waveforms of phase A current and motor speed with rated load torque
图13为电机参考转速为600 r/min,电机负载转矩由0.5 N∙m变化为2.0 N∙m加载工况下A相电流和转速实验波形。对比图13a~图13c可以看出,基于MFPCC-ARX策略下加载后转速需要2.0 s恢复至给定转速,且最大转速误差为25 r/min;DV- MPCC策略加载后恢复至给定转速的时间为2.2 s,最大转速误差为35 r/min;DV-MFPCC-ARX策略加载后恢复至给定转速的时间为1.8 s,最大转速误差为20 r/min。通过对比图13可以得到,基于DV-MFPCC- ARX策略下的加载恢复时间和转速跌落更小。
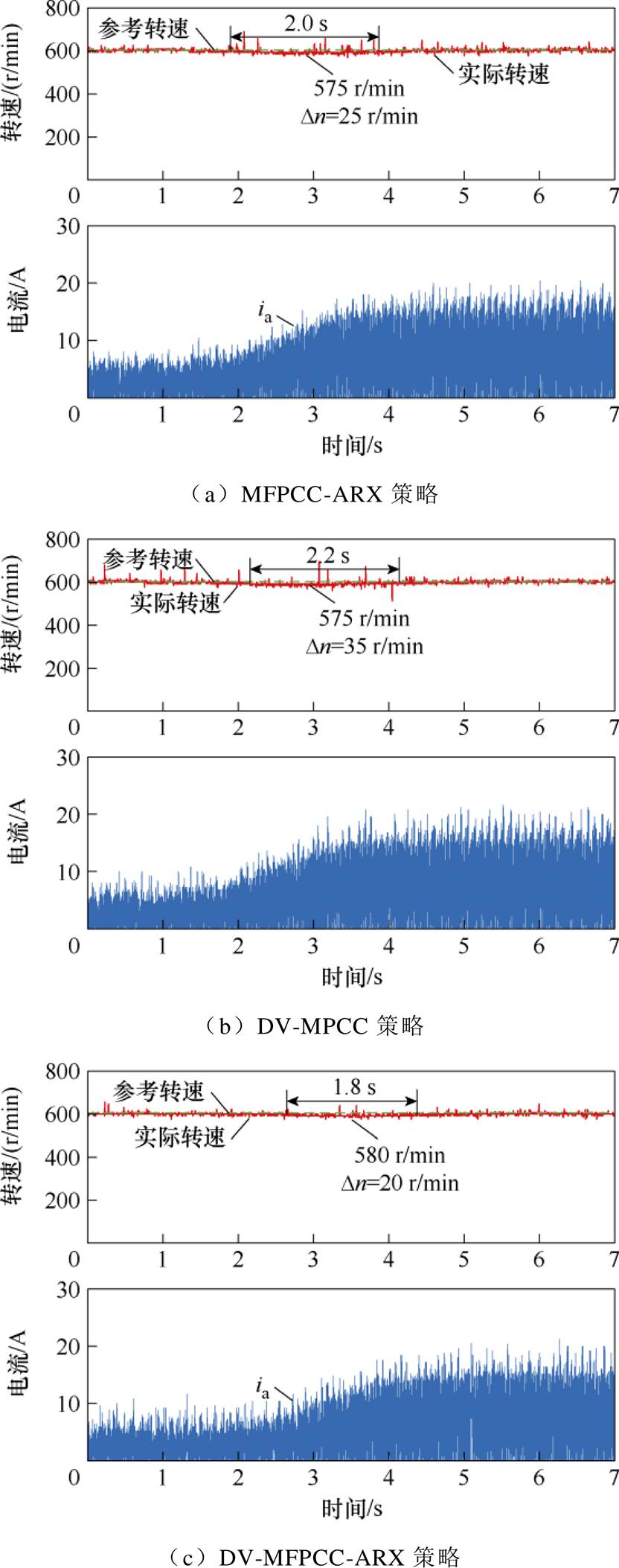
图13 加载工况下A相电流和转速实验波形
Fig.13 Experimental waveforms of phase A current and speed under loading conditions
图14为电机参考转速为600 r/min,电阻参数变化为标称电阻参数的1.5倍,电阻参数不匹配下的转速实验波形。对比图14a~图14c可以看出,基于MFPCC-ARX策略、DV-MPCC策略、DV- MFPCC-ARX策略在电阻参数不匹配下的最大转速误差分别为4、10、4 r/min。通过对比图14可知,基于DV-MFPCC-ARX策略在电阻参数不匹配下的最大转速误差相比于MPCC策略更小。
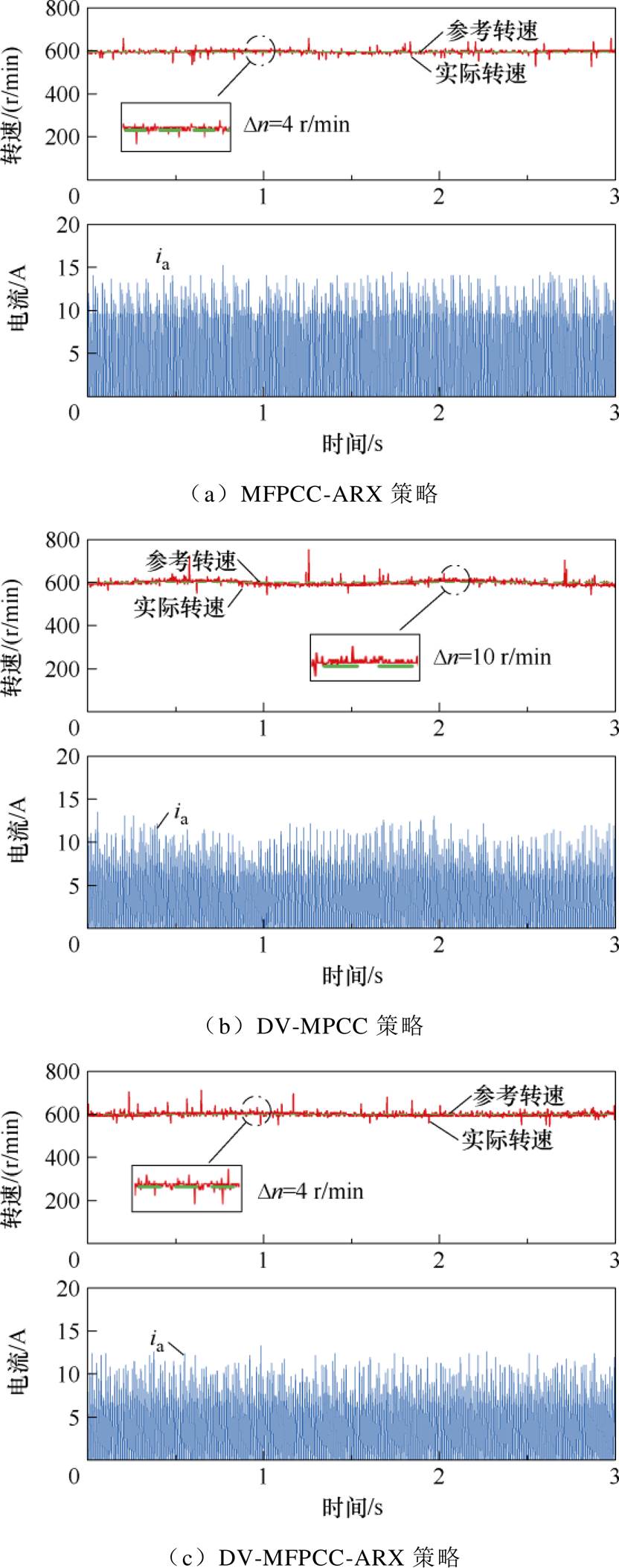
图14 电阻参数不匹配下的转速实验波形
Fig.14 Experimental waveforms of speed under mismatched resistance parameters
所提DV-MFPCC-ARX策略与MFPCC-ARX、DV-MPCC策略在稳态、加速、加载和电阻参数不匹配工况下的电流纹波和控制鲁棒性见表2。
表2 不同控制策略下的实验结果对比
Tab.2 Comparison of experimental results under different control strategies
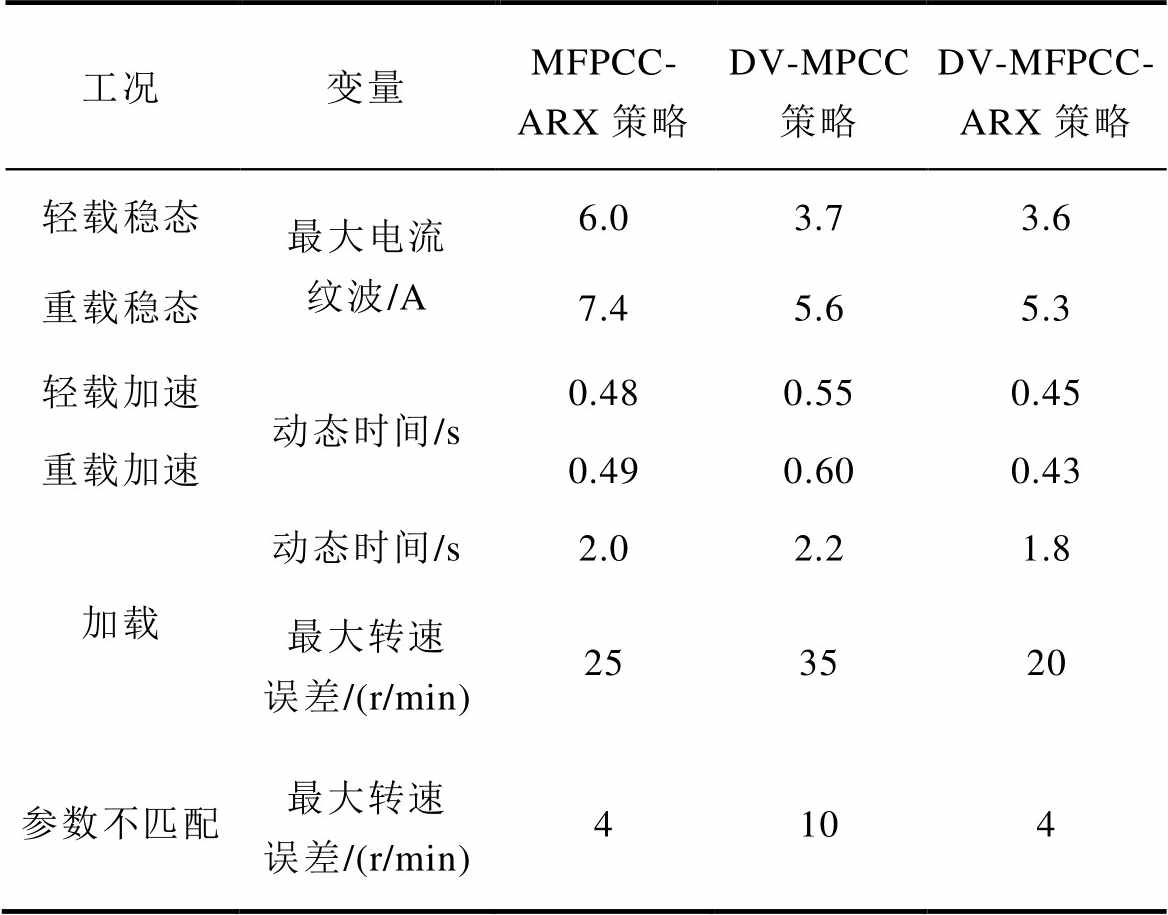
工况变量MFPCC-ARX策略DV-MPCC策略DV-MFPCC-ARX策略 轻载稳态最大电流纹波/A6.03.73.6 重载稳态7.45.65.3 轻载加速动态时间/s0.480.550.45 重载加速0.490.600.43 加载动态时间/s2.02.21.8 最大转速误差/(r/min)253520 参数不匹配最大转速误差/(r/min)4104
本文提出了一种SRM有源自回归双矢量无模型预测电流控制方法,有效地避免了电机参数的影响,同时可降低一个控制周期内的电流脉动。为了验证所提方法的有效性,搭建了实验平台,通过实验结果可以得到如下结论:
1)将有源自回归函数与开关磁阻电机系统结合得到电流预测模型,利用归一化最小均方算法对自回归函数中的系数向量进行估计,该算法计算量小且仅需一个控制参数便可实现电流预测,有效避免了对电机参数的依赖。
2)所提方法设计了一种优化双矢量控制策略,在一个控制周期内根据双电压矢量组合原则和最小化评价函数选出最优双矢量组合,并确定双矢量组合的分配时间,有效降低了电流脉动。
3)所提方法在稳态、加速、加载以及参数不匹配时,具有更好的鲁棒性。
4)所提双矢量无模型预测控制方法易与转速闭环控制等策略集成,易在线实现。
参考文献
[1] Han Guoqiang, Hong Jingwei, Chen Bingnan, et al. An improved virtual-shaft control strategy for speed synchronization of dual-SRM drive[J]. IEEE Transa- ctions on Industrial Electronics, 2023, 71(6): 5485- 5495.
[2] Gaafar M A, Abdelmaksoud A, Orabi M, et al. Switched reluctance motor converters for electric vehicles applications: comparative review[J]. IEEE Transactions on Transportation Electrification, 2023, 9(3): 3526-3544.
[3] 闫文举, 陈昊, 刘永强, 等. 一种用于电动汽车磁场解耦型双定子开关磁阻电机的新型功率变换器[J]. 电工技术学报, 2021, 36(24): 5081-5091.
Yan Wenju, Chen Hao, Liu Yongqiang, et al. A novel power converter on magnetic field decoupling double stator switched reluctance machine for electric vehicles[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5081-5091.
[4] 韩国强, 陆哲, 吴孟霖, 等. 基于改进滑模控制策略的开关磁阻电机直接瞬时转矩控制方法[J]. 电工技术学报, 2022, 37(22): 5740-5755.
Han Guoqiang, Lu Zhe, Wu Menglin, et al. Direct instantaneous torque control method for switched reluctance motor based on an improved sliding mode control strategy[J]. Transactions of China Electro- technical Society, 2022, 37(22): 5740-5755.
[5] 杨帆, 陈昊, 李晓东, 等. 一种优化开关磁阻电机换相区控制策略的高效率转矩分配函数[J]. 电工技术学报, 2024, 39(6): 1671-1683.
Yang Fan, Chen Hao, Li Xiaodong, et al. An efficient torque sharing function for optimizing the com- mutation zone control strategy of switched reluctance motors[J]. Transactions of China Electrotechnical Society, 2024, 39(6): 1671-1683.
[6] 韩子健, 李昕涛, 薛垚君, 等. 基于自抗扰滑模的开关磁阻电机转矩控制策略[J]. 微电机, 2025, 58(5): 39-44.
Han Zijian, Li Xintao, Xue Yaojun, et al. Torque control strategy of switched reluctance motor based on active disturbance rejection sliding mode[J]. Micromotors, 2025, 58(5): 39-44.
[7] 任萍, 朱景伟, 赵燕, 等. 基于双滑模控制器的开关磁阻电机调速策略[J]. 中国电机工程学报, 2024, 44(11): 4501-4513.
Ren Ping, Zhu Jingwei, Zhao Yan, et al. Speed control strategy for switched reluctance motor based on dual sliding mode controller[J]. Proceedings of the CSEE, 2024, 44(11): 4501-4513.
[8] 李宗霖, 陈昊, 戚湧, 等. 基于自抗扰滑模控制的开关磁阻电机转矩分配控制策略[J]. 电工技术学报, 2024, 39(18): 5639-5656.
Li Zonglin, Chen Hao, Qi Yong, et al. Torque sharing function control strategy for switched reluctance motor based on active disturbance rejection sliding mode control[J]. Transactions of China Electro- technical Society, 2024, 39(18): 5639-5656.
[9] 韩硕, 张勇军, 肖雄, 等. 面向异步电机模型预测直接转矩控制的自适应谐波消除方法[J]. 电工技术学报, 2025, 40(4): 1078-1089.
Han Shuo, Zhang Yongjun, Xiao Xiong, et al. Adaptive harmonic elimination for model predictive direct torque control of asynchronous motor[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1078-1089.
[10] 肖海峰, 许宇豪, 李文真, 等. 五相永磁同步电机串级模型预测电流控制[J]. 电气技术, 2023, 24(8): 1-11, 21.
Xiao Haifeng, Xu Yuhao, Li Wenzhen, et al. Model predictive current control based on series cost function for five-phase permanent magnet syn- chronous machines[J]. Electrical Engineering, 2023, 24(8): 1-11, 21.
[11] 李耀华, 郭伟超, 种国臣, 等. 基于模型参考自适应参数辨识的永磁同步电机有限状态集MPCC[J]. 电机与控制应用, 2025, 52(6): 596-607.
Li Yaohua, Guo Weichao, Chong Guochen, et al. The FCS-MPCC for PMSM based on MRAS parameter identification[J]. Electric Machines & Control Appli- cation, 2025, 52(6): 596-607.
[12] Ren Ping, Zhu Jingwei, Liu Yonghan, et al. An improved model-predictive torque control of switched reluctance motor based on sector adaptive allocation technology[J]. IEEE Transactions on Power Elec- tronics, 2024, 39(4): 4567-4577.
[13] Ge Lefei, Zhong Jixi, Huang Jiale, et al. A novel model predictive torque control of SRMs with low measurement effort[J]. IEEE Transactions on Indu- strial Electronics, 2023, 70(4): 3561-3570.
[14] Ahmad S S, Thirumalasetty M, Narayanan G. Predictive current control of switched reluctance machine for accurate current tracking to enhance torque performance[J]. IEEE Transactions on Industry Applications, 2023, 60(1): 1837-1848.
[15] 储炜, 林黄达, 易新强. 基于三重旋转坐标变换的双三相永磁同步电机模型预测电流控制策略[J]. 电工技术学报, 2024, 39(增刊1): 51-63.
Chu Wei, Lin Huangda, Yi Xinqiang. Model pre- dictive current control strategy of double three-phase permanent magnet synchronous motor based on triple rotation coordinate transformation[J]. Transactions of China Electrotechnical Society, 2024, 39(S1): 51-63.
[16] 许爱德, 胡士迈, 刘鑫, 等. 基于占空比调制的永磁辅助同步磁阻电机模型预测转矩控制[J]. 电机与控制学报, 2025, 29(5): 133-143.
Xu Aide, Hu Shimai, Liu Xin, et al. Model predictive torque control of permanent magnet assisted syn- chronous reluctance motor based on duty cycle modulation[J]. Electric Machines and Control, 2025, 29(5): 133-143.
[17] Ding Wen, Li Jialing, Yuan Jiangnan. An improved model predictive torque control for switched relu- ctance motors with candidate voltage vectors opti- mization[J]. IEEE Transactions on Industrial Elec- tronics, 2023, 70(5): 4595-4607.
[18] 唐旭, 储剑波. 一种改进型永磁同步电机模型预测电流控制方法[J]. 电机与控制应用, 2022, 49(12): 13-20.
Tang Xu, Chu Jianbo. An improved model predictive current control method of permanent magnet syn- chronous motor[J]. Electric Machines & Control Application, 2022, 49(12): 13-20.
[19] 罗力岩, 樊启高. 一种改进型永磁同步电机无模型预测电流控制策略[J]. 电工技术学报, 2025, 40(4): 1034-1045.
Luo Liyan, Fan Qigao. An improved model-free predictive current control strategy for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1034-1045.
[20] 李胜男, 何廷一, 何鑫, 等. 一种适用于永磁直驱风力发电系统的改进无模型预测控制[J]. 电气传动, 2024, 54(11): 19-25.
Li Shengnan, He Tingyi, He Xin, et al. An improved model free predictive control suitable for permanent magnet direct drive wind power generation systems[J]. Electric Drive, 2024, 54(11): 19-25.
[21] Li Wei, Cui Zhiwei, Ding Shichuan, et al. Model predictive direct torque control of switched reluctance motors for low-speed operation[J]. IEEE Transactions on Energy Conversion, 2022, 37(2): 1406-1415.
[22] Han Guoqiang, Zhu Huimin, Zhang Lin, et al. Model-free current predictive control method for switched reluctance motors[J]. IEEE Transactions on Industrial Electronics, 2024, 71(10): 12041-12050.
[23] Zhang Yongchang, Jin Jialin, Huang Lanlan. Model- free predictive current control of PMSM drives based on extended state observer using ultralocal model[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 993-1003.
[24] Han Guoqiang, Zhang Lin, Wang Yige, et al. Variable switching point model-free predictive current control strategy for SRM[J]. IEEE Transactions on Industrial Electronics, 2025, 72(5): 4470-4480.
Abstract Driven by the global low-carbon transition and carbon-neutrality goals, the new energy vehicle (NEV) industry has rapidly emerged as one of the fastest-growing and most promising technological frontiers. Since rare-earth materials are non-renewable strategic resources, the switched reluctance motor (SRM) requires zero rare-earth elements. SRM offers low cost, high durability, simple rotor structure, wide speed regulation range, high reliability, and simple maintenance and repair. It also demonstrates strong potential for electric vehicle applications. Traditional predictive control for SRM has the following disadvantages. (1) Predictive control demonstrates inherent sensitivity to motor parameter variations, resulting in deteriorated control performance. (2) SRM has severe nonlinear characteristics, making it challenging to implement predictive control strategies. (3) Conventional single voltage vector optimization period causes large phase current ripples. To improve the dynamic response of SRM drive systems, this paper investigates high-performance current control strategies.
This paper proposes a dual-vector model-free predictive current control (DV-MFPCC) based on an auto-regressive with exogenous input (ARX) function. The active autoregressive model is established based on phase-voltage and current measurements. Then, the normalized least mean square (NLMS) algorithm is used to estimate the parameter vector in the ARX model, and the predicted phase current is obtained. To reduce phase current ripple, a dual-voltage vector control strategy is designed based on the basic voltage vector characteristics. The dual-voltage vector is optimized. The allocation time for the dual-voltage vector combination is calculated by minimizing the evaluation function. The optimal dual-voltage vector combination is determined.
An experimental platform for a three-phase 12/8 structure SRM drive system is established. The control chip is the TMS320F28335, and the sampling chip is AD7606. The simulation model mainly includes the electromechanical equation, asymmetric half-bridge power converter, control signal generation, and phase winding modules. In the experiments, the proposed DV-MFPCC-ARX strategy is compared with MFPCC-ARX and DV-MPCC strategies in terms of current ripple and control robustness under steady-state, acceleration, loading, and parameter-mismatch conditions. The experimental results show that: (1) By combining the ARX function with the switched reluctance motor system, a current prediction model is obtained. The normalized least-mean-squares algorithm is used to estimate the coefficient vector in the autoregressive function. This algorithm has low computational complexity and requires only one control parameter for current prediction, eliminating dependence on motor parameters. (2) The proposed method develops an optimized dual-vector control strategy. Within each control period, it selects the optimal dual-vector combination based on voltage-vector-pairing principles and minimization of the evaluation function, while determining the corresponding time allocation. (3) The proposed method demonstrates enhanced robustness during steady-state, acceleration, loading, and parameter mismatch conditions. (4) The developed dual-vector model-free predictive control strategy can be readily integrated with speed closed-loop control and other strategies, facilitating online implementation.
keywords:Switched reluctance motor (SRM), auto-regressive with exogenous input, dual vector, model- free predictive current control
中图分类号:TM352
DOI: 10.19595/j.cnki.1000-6753.tces.250848
国家自然科学基金(52007189)和江苏省基础研究计划(BK20242089)资助项目。
收稿日期2025-05-21
改稿日期 2025-06-19
韩国强 男,1990年生,副教授,硕士生导师,研究方向为电机及其控制。
E-mail: hgq@cumt.edu.cn(通信作者)
王怡歌 女,2001年生,硕士研究生,研究方向为电机及其控制。
E-mail: TS23230151P31@cumt.edu.cn
(编辑 崔文静)