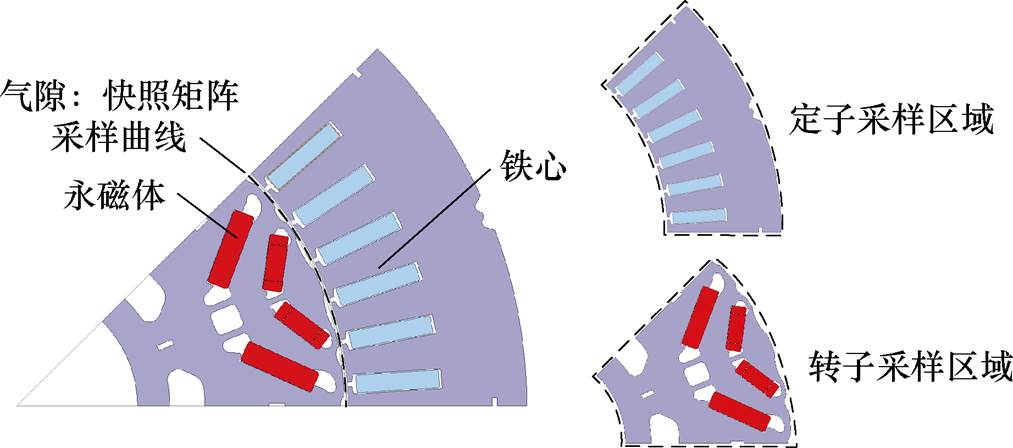
图1 电机有限元模型
Fig.1 Finite element model of motor
摘要 准确快速量化温度对电磁性能的影响对电机的可靠运行、状态监测与优化设计具有重要意义。但是,车用永磁同步驱动电机工况复杂,工作温度动态多变,温度影响下电机励磁特性会发生变化,电机磁路也呈现高度非线性特征,传统有限元或热网络方法难以实现考虑温度的磁场快速准确求解。该文结合机器学习领域的迁移学习思想,提出一种在不同温度、不同电机工作点下分步泛化的磁场快速求解方法。首先采用本征正交分解对磁场矩阵进行降维,构建低维特征空间;然后结合迁移学习策略,将常温模型参数迁移至不同温度工况,显著减少训练数据需求;最后采用Kriging插值算法建立温度-工作点-磁场的映射关系,实现任意工况电机磁场的实时预测。结果表明,完成神经网络训练与插值后,所提方法实时计算完整电周期磁场的时间为0.95 s,相较于有限元求解方法,大幅降低了磁场求解所用时间;泛化范围内重构平均磁通密度相对误差不超过2.34%。通过搭载探测线圈的样机实验平台,验证了所提方法的有效性和准确性。提出的分步泛化策略为解决电机多场耦合中的温度-磁场的复杂交互关系提供了新的技术途径。
关键词:永磁同步电机 分步泛化 迁移学习 磁场计算
永磁同步电机因其高功率密度、宽弱磁范围等优点而被广泛应用于电动汽车电驱动系统[1]。然而,车用驱动电机工况多变,运行过程温升变化剧烈,永磁体具有较高的温度敏感性,温度的升高将导致其剩磁通密度和矫顽力降低,使电机转矩输出能力受到影响[2]。同时,受温度影响,电机损耗特征发生变化,热源数值的改变使电机效率与温升计算结果与实际数值产生偏差,容易导致故障问题[3]。快速准确地获取不同温度下电机内部电磁特征,对于实现驱动电机的稳定可靠工作,以及电机优化[4]、电磁-热多物理场建模[5]、温升校核[6],实现电机系统数字孪生具有重要意义[7]。然而,现有电磁模型大多忽略温度影响,变温工况下的电机电磁场求解方案亟待完善。
当前,考虑温度的电磁场求解方法主要有有限元法和解析法两类:有限元法通过多物理场耦合仿真的方式考虑温度效应,精确求解不同温度下的电机电磁性能,但单次计算耗时长,无法满足快速实时求解需求[8]。解析法通过精确子域法和等效热网络法迭代计算随温度变化的磁矢位[9],求解速度快。然而子域法仅适用于表贴式永磁电机,针对不同拓扑结构电机的泛化能力受限,难以处理内置式永磁同步电机复杂的磁饱和效应。
为解决以上方法的不足,有学者在有限元计算基础上采用降阶方法对电机磁场进行求解[10-12]。利用有限元获取电机磁场矩阵,采用本征正交分解(Proper Orthogonal Decomposition, POD)法对数据降维,获得维度更小的电机模态信息,实现磁场重构。例如,文献[11]通过磁场降阶求解电机电感参数,实现了控制参数的更新,提升电机控制效果。文献[12]结合POD与神经网络方法,建立了扁线导体多工况磁场快速计算模型,显著提升了损耗计算效率,为扁线电机的高效优化设计提供了关键技术支撑。降阶方法适用于不同类型的电机拓扑,但是现有的降阶模型均在常温下对电机磁场进行重构,缺乏考虑温度维度的电磁降阶模型方案。
随着机器学习技术的兴起,智能算法为电机参数的求解与优化提供了新的可能性[13]。文献[14]结合反向传播神经网络与遗传算法,完成了电机的多目标优化设计。文献[15]通过神经网络构建电机磁链模型,并将其应用在硬件在环仿真平台中。目前,人工智能算法主要聚焦常温下电机参数与电磁性能间的单一映射关系构建[16],尚无利用智能算法实现不同温度下电机磁场变化规律的相关研究。主要原因在于,使用数据驱动的方式建立温度与电机性能映射关系需要大量不同温度下的训练数据,计算成本急剧增长。同时由于维度灾难的影响[17],数据的性质和空间结构变得越发复杂,传统算法效率低 下[18]。例如,迁移学习方法中的微调参数法仅调整顶层权重,无法动态适应连续温度参数变化。
为了弥补以上研究的缺失,解决智能算法训练数据需求量大、训练成本高的问题,本文提出一种采用分步泛化思想的电机磁场实时求解方法。以典型的内置式永磁同步电机为对象,首先,建立考虑温度维度的电机电磁仿真模型,并基于仿真结果提取磁场矩阵。然后,提出基于迁移学习神经网络与插值算法的电机磁场分步泛化求解方法:使用POD算法对磁场矩阵降维,构建低维特征空间,采用神经网络对不同温度下的磁场特征进行学习;神经网络与Kriging插值算法分步对工作点-温度-磁场构建映射关系,减小对训练数据的需求,降低训练成本。最后,搭建样机实验平台,验证所提方法的正确性和有效性。
本文所提方法适用于不同电机拓扑。在不失通用性的前提下,内置式永磁同步扁线电机有限元模型如图1所示,电机基本参数见表1。
永磁材料的磁性能对电机电磁性能有极大的影响。在不同温度下对电机建模时,需要精确考虑永磁体励磁特性与温度的关系,图2展示了示例电机永磁材料在不同温度下的退磁曲线和内禀退磁曲线。将这些曲线赋值到永磁材料属性中,可以获得不同励磁特性下有限元磁场仿真结果。铁心所用B25AV1300软磁材料的温度敏感性较低,在200℃以内其磁饱和特性变化幅度极小[19],因此本文以常温下铁心材料的B-H曲线替代不同温度下软磁材料的属性。
图1 电机有限元模型
Fig.1 Finite element model of motor
表1 内置式永磁同步扁线电机参数
Tab.1 Interior permanent magnet synchronous harpin motor parameters
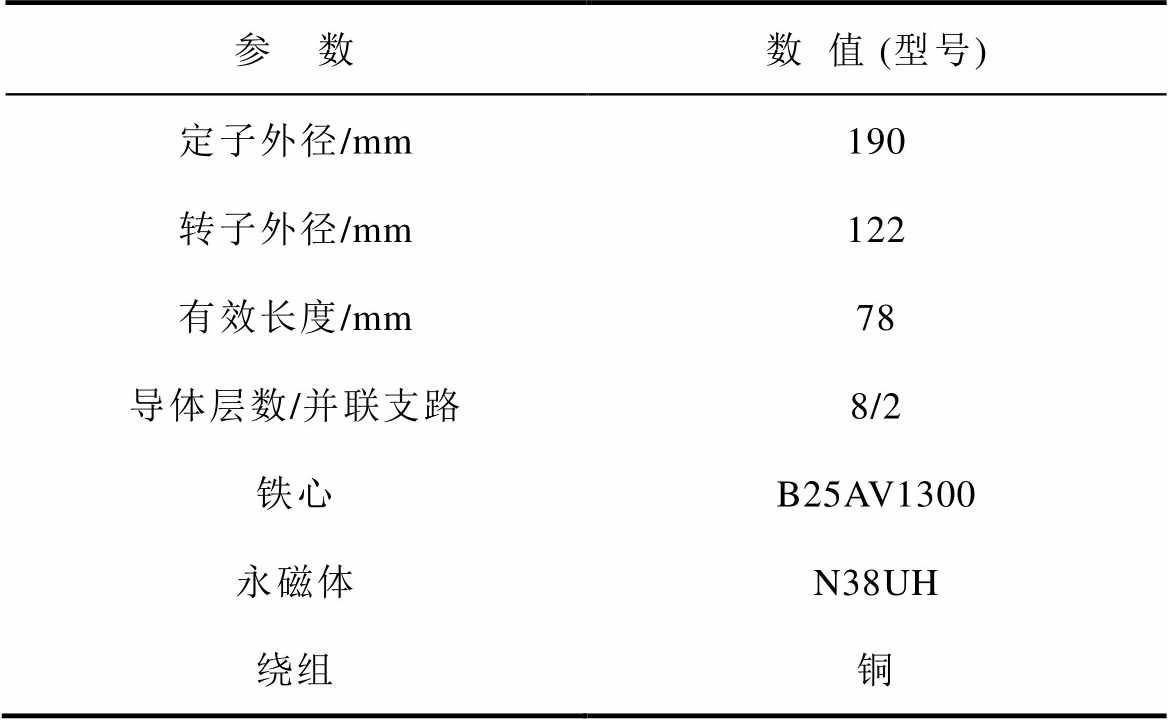
参 数数值 (型号) 定子外径/mm190 转子外径/mm122 有效长度/mm78 导体层数/并联支路8/2 铁心B25AV1300 永磁体N38UH 绕组铜
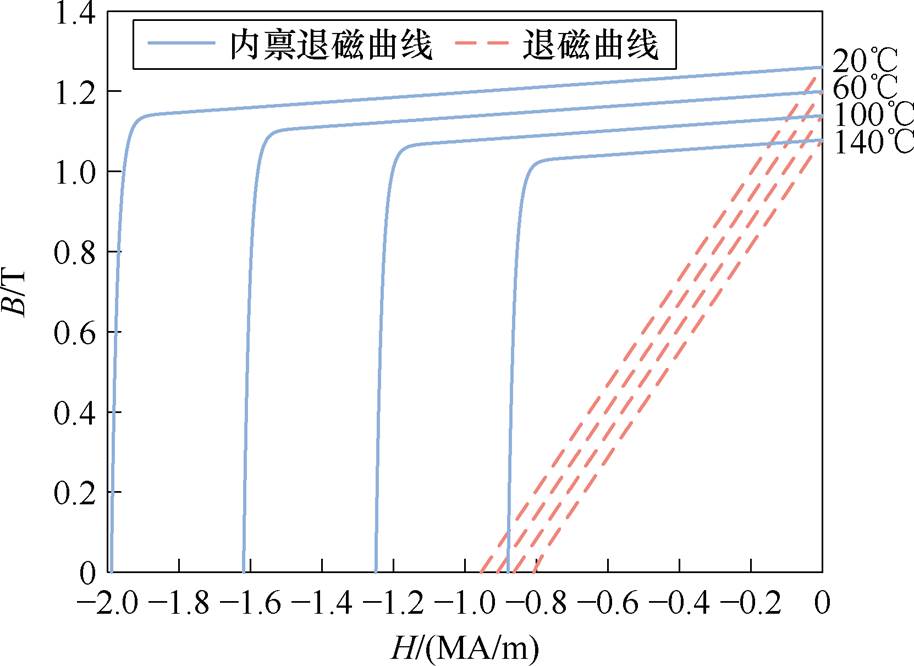
图2 不同温度下N38UH退磁曲线与内禀退磁曲线
Fig.2 N38UH demagnetization curves with endowment demagnetization curves at different temperatures
在电机磁场求解时,磁通密度是表征电磁场分布的关键物理量。本文以气隙径向磁通密度以及定、转子磁通密度幅值为研究对象构建快照矩阵。如图1所示,采样曲线和采样区域已明确标注,该方法具有通用性,可扩展至电机求解域内各类电磁量的重构。快照矩阵提取过程如图3所示,矩阵元素包含不同仿真时刻、不同位置的磁场信息。矩阵每一行表示电机在特定转子机械角度下不同位置的采样点的磁场结果,每一列表示在一个电周期内特定采样点的磁场变化情况。
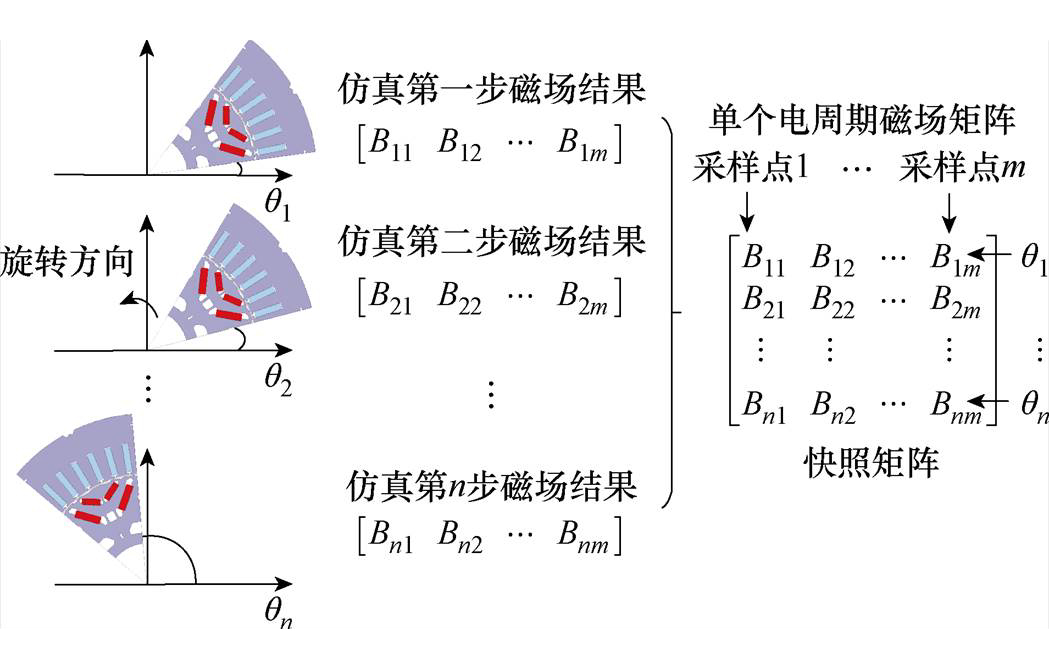
图3 快照矩阵数据提取过程
Fig.3 Snapshot matrix data extraction process
本文扩展文献[12]的常温磁场降阶方法,研究温度变化对电机磁场降阶的影响。针对不同温度下训练集数据需求量大、数据预处理时仿真成本高的问题,提出多温度分步泛化的改进方法,降低温度泛化时的训练集数据需求。考虑温度维度的磁场泛化方法流程框图如图4所示,主要步骤为:利用有限元获取不同温度(20、60、100℃)下的训练集数据,采用POD方法对磁场矩阵进行降维,训练20℃下的神经网络对磁场进行重构。其中,POD方法通过奇异值分解(Singular Value Decomposition, SVD)的方式对数据进行降维。在此基础上,引入迁移学习思想,迁移常温神经网络参数分别学习60℃和100℃下的磁场数据,完成特定温度下不同工作点的磁场泛化。基于训练完成的神经网络结果结合Kriging插值算法,对训练范围内任意温度下的电机磁场进行快速求解,完成不同温度下的磁场求解泛化。
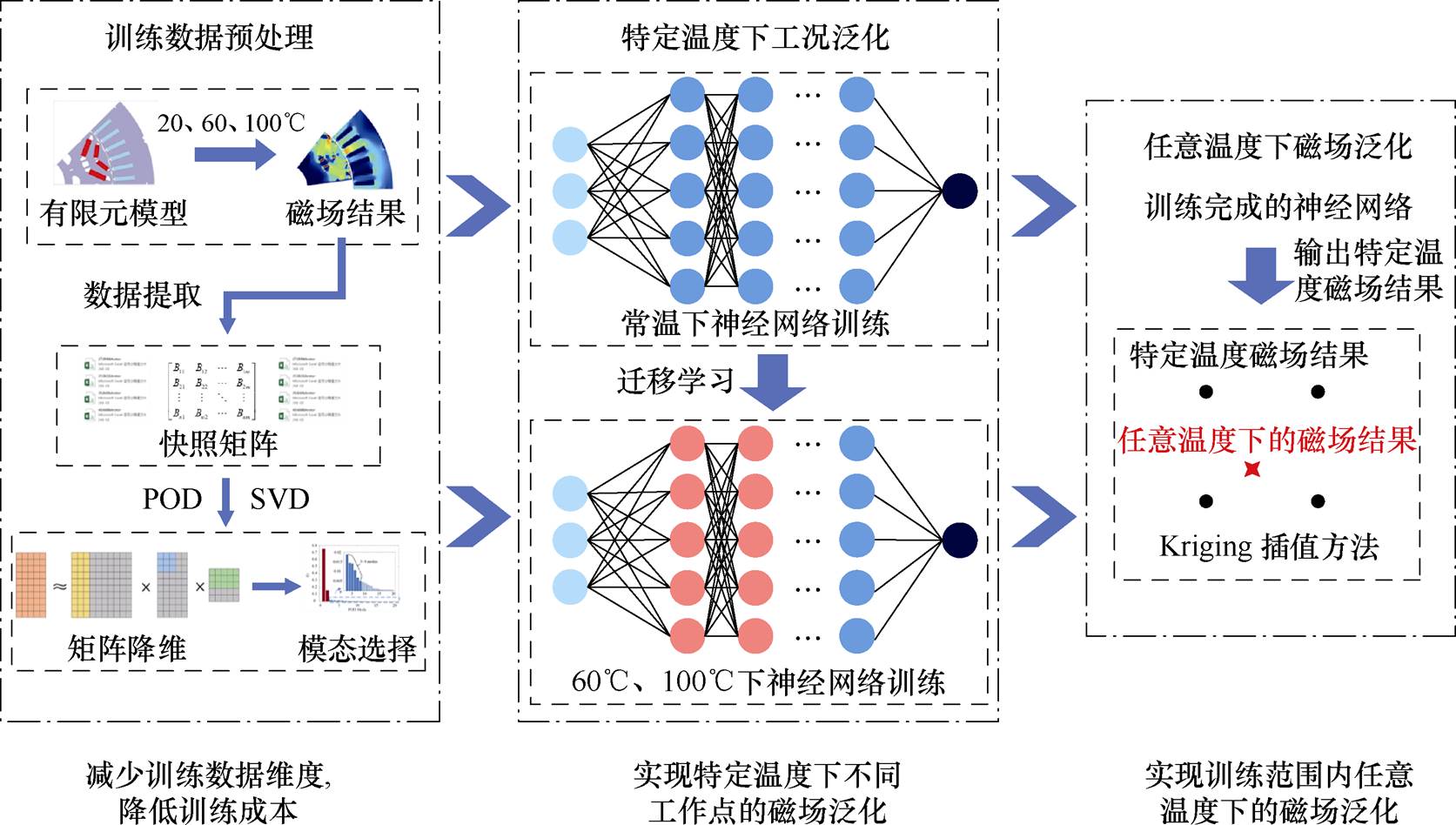
图4 考虑温度维度的磁场泛化方法流程框图
Fig.4 The flow of the magnetic field generalization method considering the temperature dimension
考虑温度的分步泛化思路如图5所示。使用迁移学习对磁场进行重构时,泛化范围为特定温度下的电机不同工作点;在利用Kriging插值算法对温度进行泛化时,插值算法仅对温度进行插值,而不用考虑电机不同工作点对磁场的影响。分步泛化可在两个阶段各自减少泛化维度,以此减轻对训练数据成本的需求。
利用有限元提取电机磁场矩阵,又称快照矩阵后,POD方法对快照矩阵进行特征分解后将原始数据转换为一组正交基,称为本征函数或模态。
假设获取的磁场快照矩阵为As,POD方法通过奇异值分解的方式对数据进行降维。将大小为n×m的快照矩阵分解为三个矩阵,分别为
 (1)
(1)
式中,U、V分别为左、右奇异矩阵;Σ为一个大小为n×m的对角矩阵,其对角元素为As的特征值,用l表示。
定义n×m维系数矩阵C为
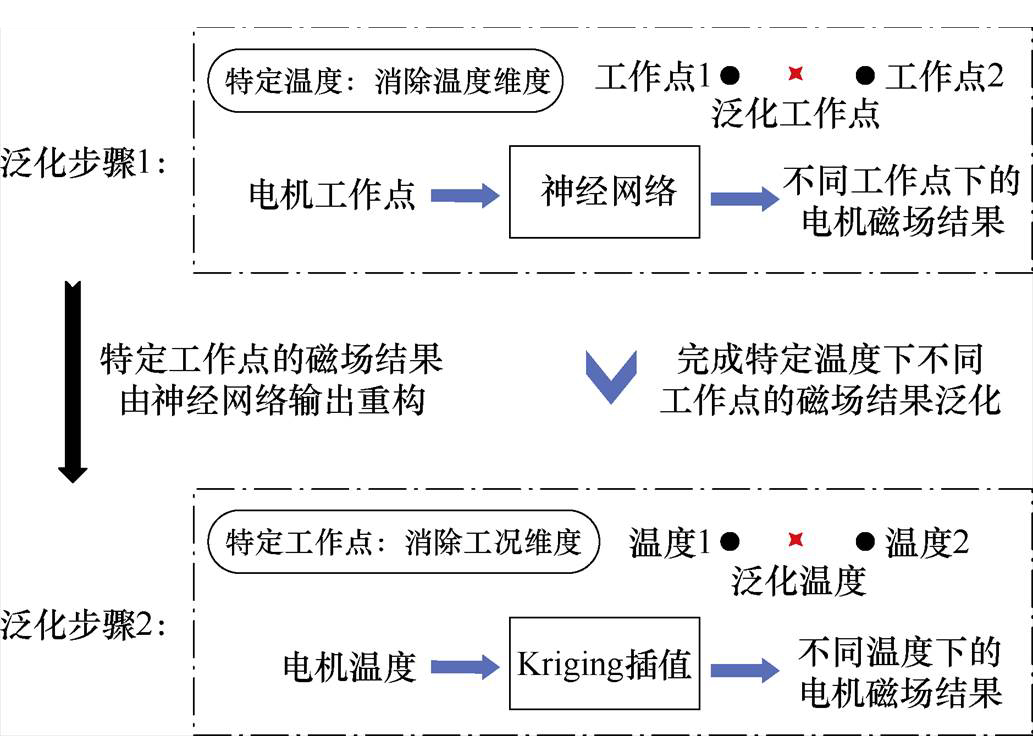
图5 考虑温度的分步泛化思路
Fig.5 Stepwise generalization considering temperature
 (2)
(2)
右奇异矩阵V为
 (3)
(3)
奇异向量j及其相应的加权系数h构成了POD的正交基函数,又称为POD模态,下角标1~m表示模态对应的阶次,同一阶次的j和h相乘,获得与快照矩阵相同维度的矩阵,将各阶乘积的矩阵结果加和完成矩阵的重构。模态的能量可以通过Σ中特征值的二次方计算。第i阶模态的相对能量计算为
 (4)
(4)
式中,li为第i阶模态对应的特征值。
POD模态的能量从1阶向后依次递减。利用前r阶模态对快照矩阵的近似求解,Ar为
 (5)
(5)
式中,r<m,r越小重构矩阵所用到的数据越少,以此实现降维的目的。在对不同工作点的磁场矩阵进行降维时,前6阶模态积累的相对能量占比均超过99%。因此,提取前6阶模态结果作为POD方法的输出。
迁移学习利用源领域已学习的知识来提升目标领域的模型性能,能有效解决训练数据不足的问题。在电机磁场的计算过程中,不同温度下的电磁场分布往往具有相似特征,这为迁移学习提供了应用场景。本文基于这一思想,通过构建共享部分网络参数,将常温下训练的网络模型知识迁移至多温度工况,可显著提升不同温度下的神经网络训练效率。
本文采用的神经网络沿袭了文献[12]的网络结构,以电机电流激励与采样点位置坐标与仿真时刻作为输入,输出对应工作点的POD模态,实现磁场重构。神经网络由输入层、隐藏层和输出层组成。隐藏层的数值是基于前一层的输入、当前层的权重因子W、偏置因子b和激活函数来计算的,神经网络的输入和输出之间的映射关系[20]为
 (6)
(6)
式中,net为网络输出;s为非线性激活函数。权重因子和偏置因子在隐藏层的每一个神经元中,作为有待训练的网络参数。损失函数采取方均根误差方法。神经网络通过正向和反向传播的过程来调整网络参数,使损失函数数值随迭代次数逐渐减小。
在本研究中定义20℃下的训练数据为迁移学习的源领域,60℃与100℃的磁场重构为目标领域。因此,在构建训练数据时,60℃与100℃的训练集数据少于20℃下的训练数据,进一步减少训练神经网络所需的数据成本。
不同温度下的神经网络结构如图6所示,图6a为常温下的神经网络结构,图6b为基于迁移学习思想的在60℃和100℃下的网络示意图。在训练初始阶段,利用丰富的常温工况训练数据,完整训练得到20℃下的神经网络模型参数;假设网络包含隐藏层数目为n,温度适配阶段,在已经训练完成的常温工况神经网络参数的基础上,对不同温度工况少量的训练数据,采用参数冻结的迁移学习方法,固定前n-1层隐藏层神经元的权重参数,保留其已经训练完成的特征提取能力,仅开放最后一层隐藏层神经元的训练权限。这种部分微调策略既有效利用了常温工况的先验知识,又通过少量高温数据实现了模型适配,显著降低了训练计算开销。
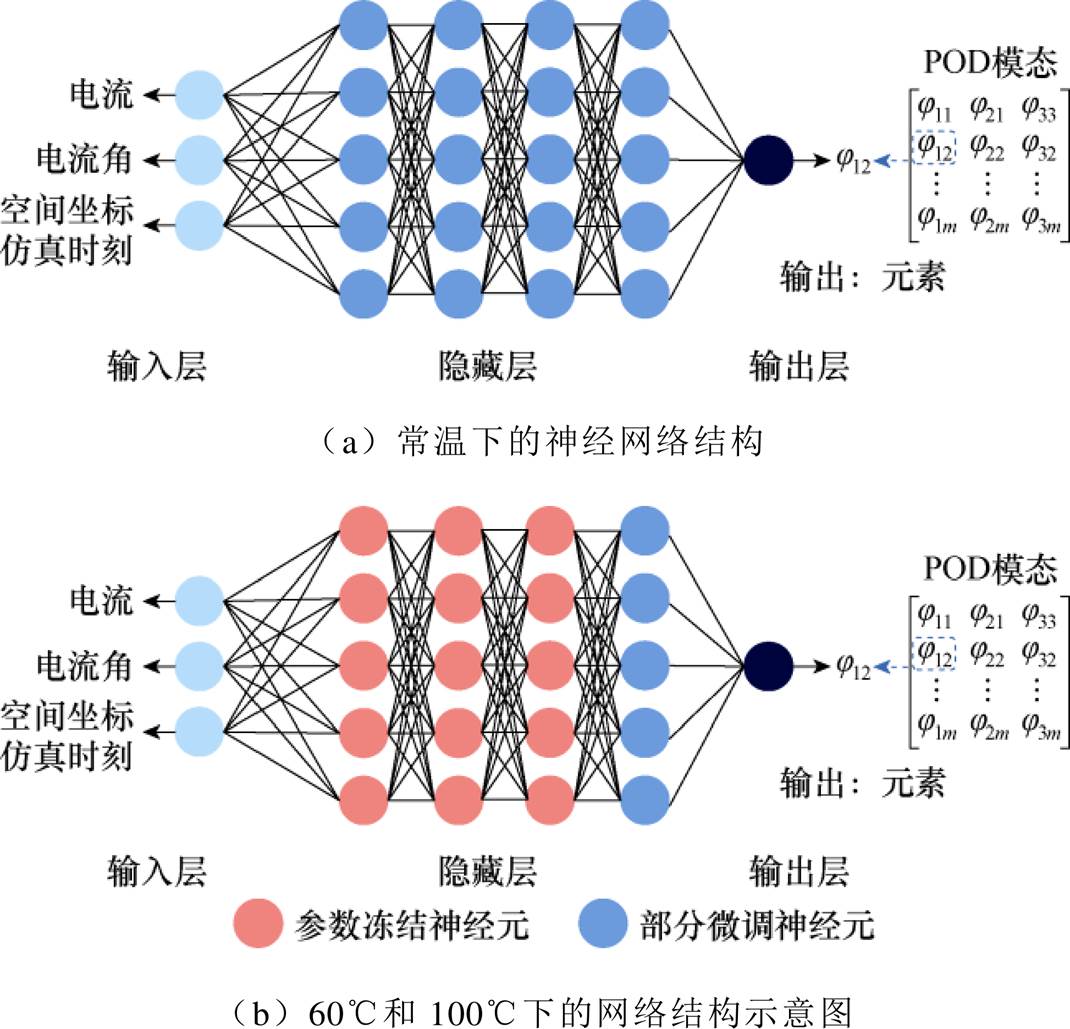
图6 不同温度下的神经网络结构
Fig.6 Neural network structure at different temperatures
与传统插值方法相比,Kriging方法的精度更高,在神经网络重构的磁场结果基础上,引入Kriging插值算法,对任意温度下的电机磁场结果进行插值。Kriging根据已有的温度数据点估算未采样温度的磁场结果,有
 (7)
(7)
其中
 (8)
(8)
式中,Z(s)为待插值目标;Z(Ti)为已有温度点数值;Pi为插值权重系数;d为待插值温度s与已知温度Ti之间的差值;c为插值算法的控制参数,通常取正实数。通过考虑差值之间的关联性,Kriging方法为相邻点分配权重以获得准确的预测。由于插值算法仅以温度作为唯一输入变量,显著降低了插值函数的维度复杂度,构造插值系数的时间近乎忽略不计,有效减少了运算成本。结合神经网络输出特定温度下具体工作点的磁场结果进行插值,在降维的同时保证了预测精度。
将提出的磁场求解泛化方法应用于示例内置式永磁同步电机模型。鉴于文献[10, 12]已对常温工况下电机磁场降阶方法的重构能力进行了充分验证,本文重点研究温度变化对方法精度的影响。为突出温度维度特性,将工作点范围缩减限定在电流有效值40~80 A、相位固定30°的区间,并采用拉丁超立方体采样确定工作点分布。20℃下采集50个工作点的磁场矩阵作为训练集,60℃和100℃下各采集20个工作点;同时,每个温度工况下另设10个工作点作为独立验证集。在神经网络训练过程中,采用基于验证集的早停机制:避免训练过拟合并确保模型的泛化性能。
采用反向传播(Back Propagation, BP)神经网络结构。神经网络目的是学习当前温度下电机工作点与前6阶模态对应关系。首先对于隐藏层层数及包含神经元的个数进行了对比分析,20℃工况下神经网络训练时n层隐藏层中的神经元参数均进行迭代更新,60℃和100℃工况下,采用迁移学习仅对最后一层隐藏层神经元训练更新。以一阶模态的训练过程为例,改变神经网络隐藏层数目和神经元数目,统计在不同网络结构时60℃下迁移神经网络输出结果的回归系数。回归系数用以表示网络预测结果精度的高低,系数数值越接近于1,网络的拟合效果越好。不同隐藏层和神经元组合下的结果如图7所示,当隐藏层数超过4时,测试集回归系数提升幅度小于0.01,趋于收敛。另一方面,神经元个数的增加对于网络拟合效果有一定增益,但不是主导作用。为平衡拟合精度和训练消耗计算资源,最终本文将神经网络设计为4个隐藏层,每层包含30个隐藏神经元。
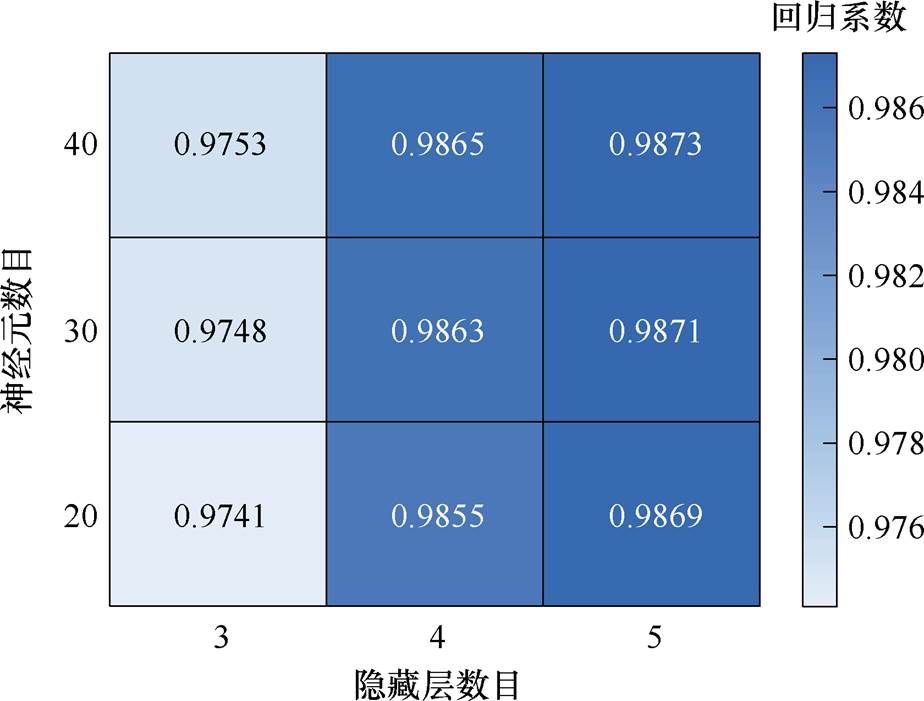
图7 不同隐藏层和神经元组合下的回归系数
Fig.7 Regression coefficients for different hidden layer and neuron combinations
在确定神经网络结构之后,对不同温度下的网络进行训练和迁移。以一阶模态为例,图8对比了三个温度下神经网络训练时验证集数据损失函数数值变化情况,三者收敛结果相近。图9显示了60℃和100℃工况下测试集的神经网络输出与目标值之间的关系,回归系数均接近于1。
表2记录了三个温度工况下的训练时间、损失函数收敛后的最小值以及输出结果回归系数。由于60℃和100℃工况下,神经网络训练是基于部分20℃的网络参数进行训练,且其训练集数据量小于20℃。在利用迁移学习思想训练神经网络时,训练时长明显缩短,约为源领域训练时长的1/5。三者的验证集损失函数收敛结果数值相近,由于20℃拥有更多可供训练的神经元权限,其损失函数值最低,为0.000 3。三者的回归系数均非常接近于1,证明了三个温度工况下训练完成的神经网络均能够较高精度地完成模态的泛化。60℃和100℃下的神经网络训练结果也说明了基于迁移学习的神经网络在有效降低训练数据成本的同时,也具有良好的泛化性能。
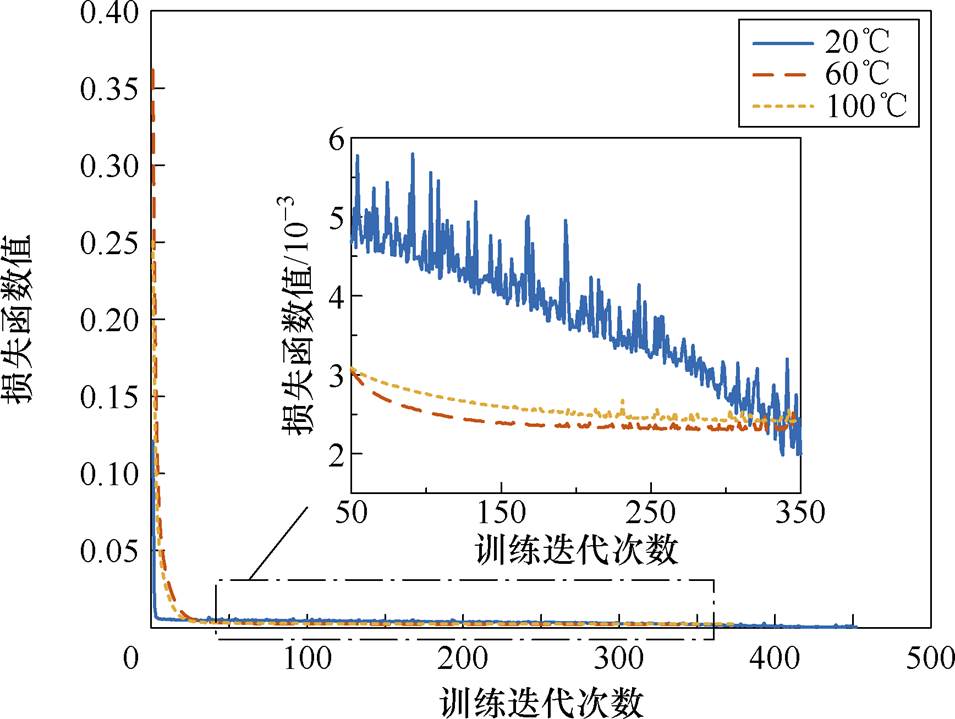
图8 不同温度下验证集损失函数变化情况
Fig.8 Variation of the validation set loss function at different temperatures
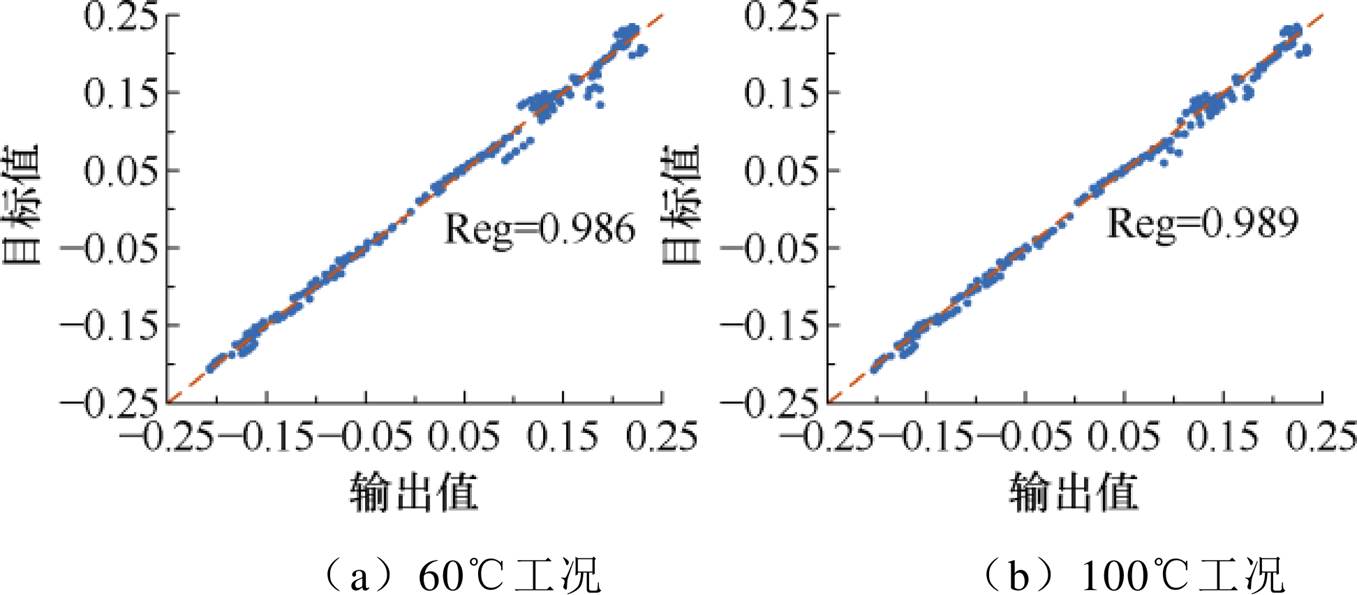
图9 神经网络输出与目标值之间关系
Fig.9 Relationship between the neural network outputs and target
表2 神经网络训练结果数据
Tab.2 Neural network training process data
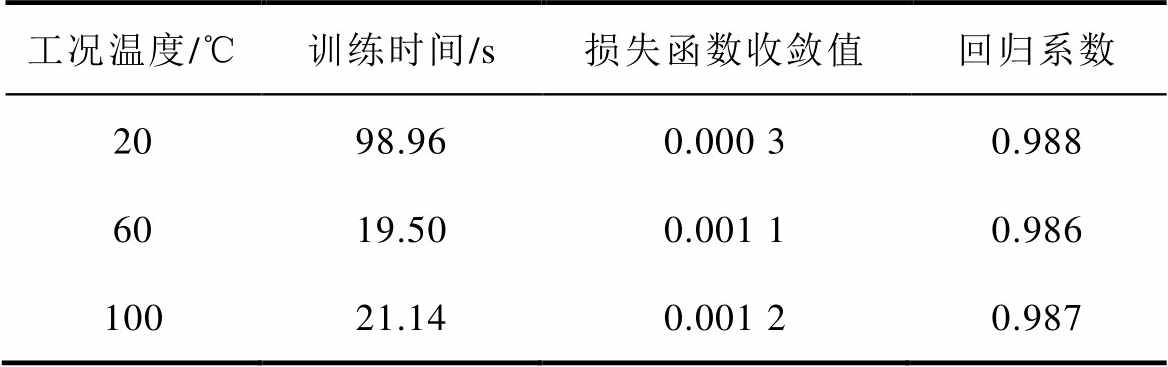
工况温度/℃训练时间/s损失函数收敛值回归系数 2098.960.000 30.988 6019.500.001 10.986 10021.140.001 20.987
以40℃下电流值58 A工作点为例,该工作点不在训练集与验证集数据中,对比所提方法在全新工作点下的磁场重构精度。图10展示了当转子转动到不同的机械角时Kriging方法插值重构获得的气隙径向磁通密度结果和有限元提取结果。电机气隙采样点的角度范围为0°~45°。所提方法和有限元计算结果相似。
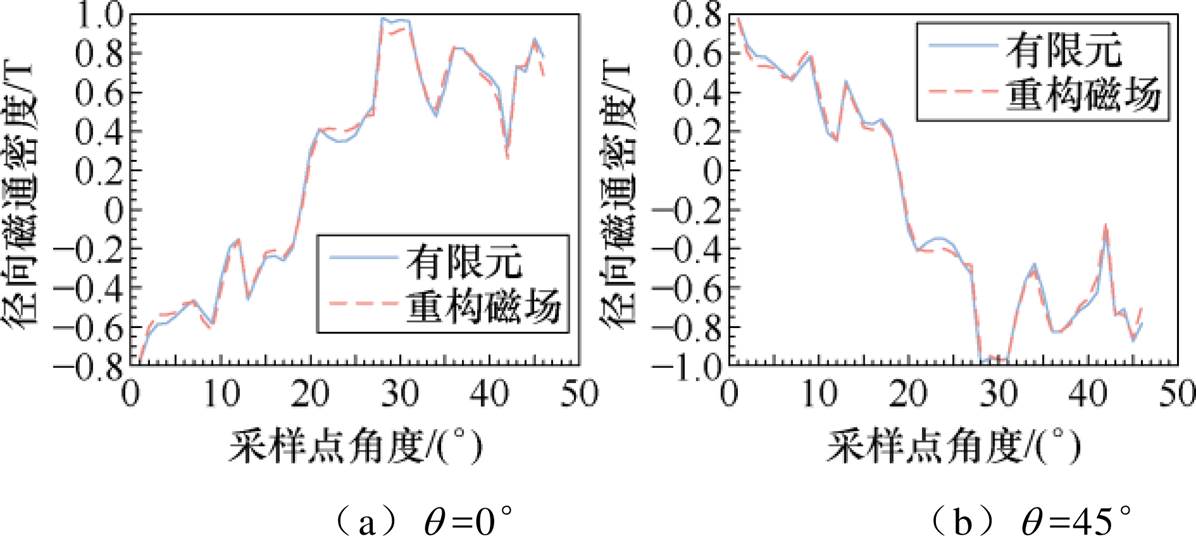
图10 重构气隙径向磁通密度结果和有限元结果对比
Fig.10 Comparison of air gap radial magnetic density results obtained by reconstruction and finite element results
图11展示了所提方法重构获得的定子和转子磁通密度云图以及和有限元的误差情况。重构磁通密度云图结果和有限元结果整体相符,由于POD降维过程以及神经网络和插值的泛化过程均会引起精度的降低,极少数位置重构误差较为显著。为了量化所提出的降阶方法在一个仿真周期内与有限元的误差,本文定义每一个仿真时间步的平均误差ME为
 (9)
(9)
式中,ei为每一个采样点的重构磁场与有限元结果的差值绝对值;m为采样区域的内样本点的数量。
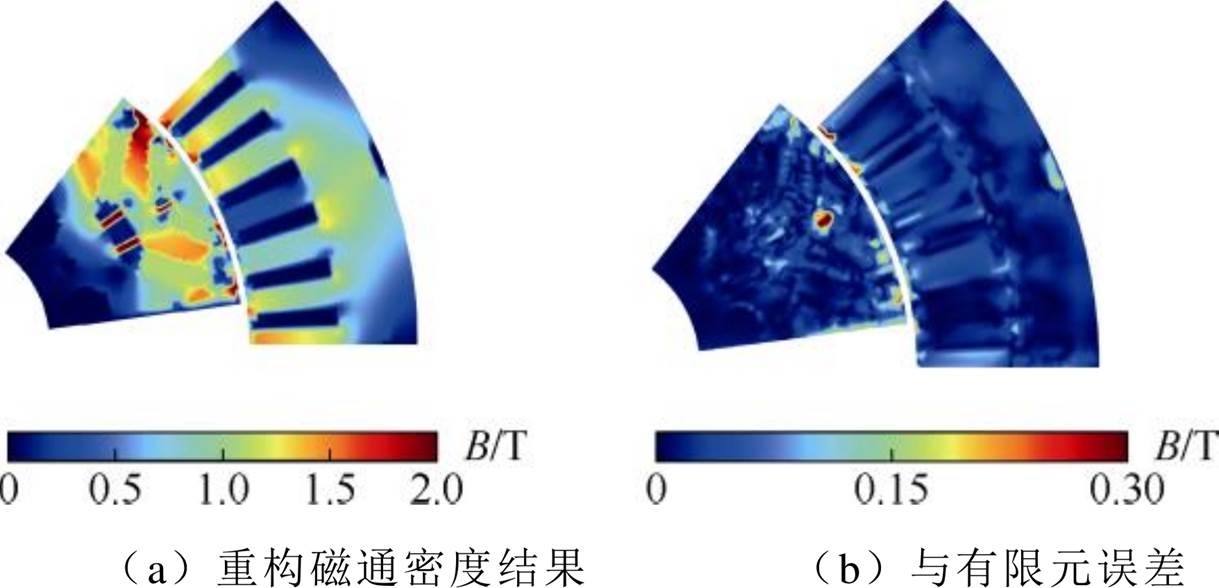
图11 定子和转子磁通密度云图以及和有限元误差
Fig.11 Stator and rotor magnetization results and error
考虑到定转子磁场分布规律存在差异,在进行误差分析时将定子磁通密度云图结果和转子云图结果分别进行对比。一个仿真周期内41个时间步的平均误差如图12所示,定子区域的误差平均值为0.013 4 T,转子区域平均值为0.003 9 T。与有限元法求解的平均磁通密度相比,定子和转子的误差占比分别为2.34%和0.6%,重构磁场精度与有限元求解结果基本一致。
在完成了磁场的重构后,气隙磁通可以由气隙径向磁通密度对磁通面积积分获取,有
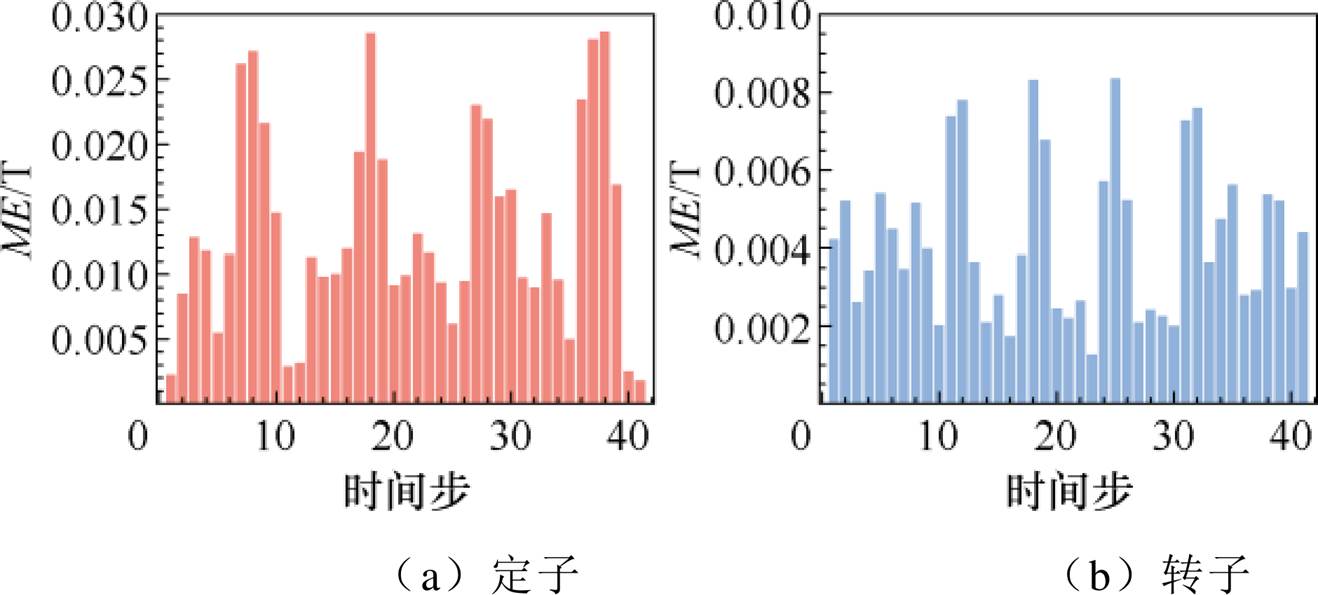
图12 定转子区域不同时间步的平均误差
Fig.12 Mean error for different time steps for stator and rotor
 (10)
(10)
式中,Br为径向通量密度;s为积分面积。结合每相串联匝数N可以求解电机磁链为
 (11)
(11)
在电机磁链结果基础上,进而求解平均转矩为
 (12)
(12)
式中,E为反电动势;I为电流有效值;w为角速度。
以电流有效值60 A、70 A激励为例,图13对比了在不同温度下基于所提方法重构的磁场结果计算的电机转矩与有限元仿真获得的平均转矩。在不同温度不同电机工作点下,两者求解的转矩结果较为一致,随着温度的升高,永磁体励磁效果衰减,转矩呈现下降趋势。所提方法求解的平均转矩略微低于有限元仿真结果,这是磁场重构时舍弃了部分能量占比低的模态导致的。计算得到的平均转矩与有限元的相对误差低于2.1%,体现了所提方法优异的温度泛化性能。
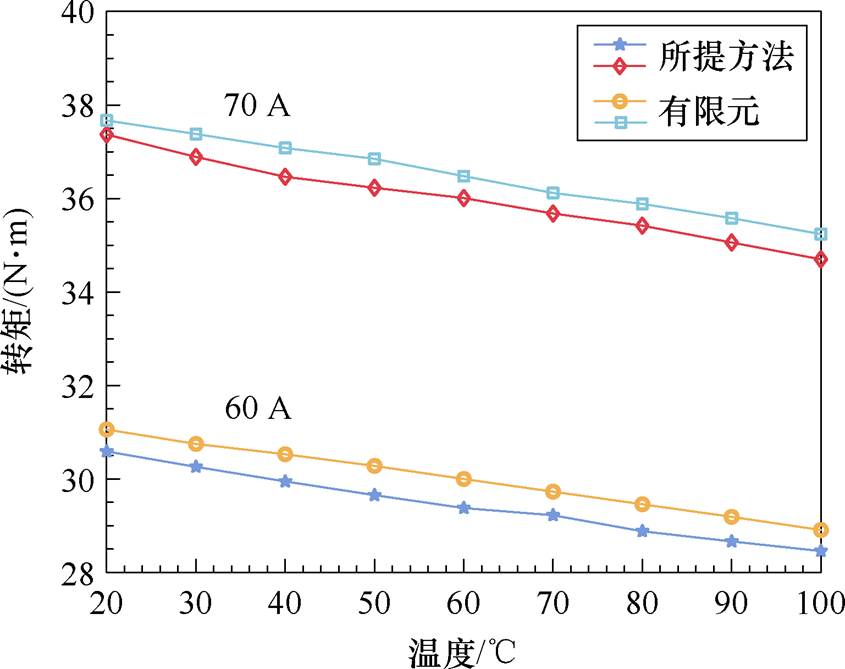
图13 不同温度下平均转矩结果对比
Fig.13 Comparison of average torque results at different temperatures
在求解时间方面,二维有限元模型在一个电周期内的仿真时间为85 s,且对不同温度下的电磁性能仿真需要重新设置永磁材料属性。所提方法在训练数据预处理阶段耗费2.125 h,不同温度下各阶模态的神经网络训练时间为873.2 s。在完成神经网络训练和插值后,所提方法计算单个电周期磁场时代码运行时长约为0.95 s,可直接求解不同温度下的磁场结果,极大地提升了电机磁场求解速度。
另一方面,结合车用驱动电机工况复杂多变的应用背景,利用所提方法获得的磁场结果计算电机效率MAP,以验证更为宽泛范围的工况泛化能力。在求解电机效率MAP时需要扩展所提方法的工作点泛化范围至电机MAP对应工作区域。在任意温度Tt下,基于重构的磁场结果,电机铁损可以由Bertotti铁耗计算模型进行求解,有
 (13)
(13)
式中,pFe为铁损密度;fs为磁场交变频率;Kh为磁滞损耗系数;Kc为涡流损耗系数;Ke为附加损耗系数;Bm为Tt温度下重构的磁通密度 幅值。
电机铜损为
 (14)
(14)
式中,R0为常温下电机绕组电阻;T0为参考温度,通常取20℃;a为电阻温度系数。
基于计算的电机铁损和铜损,结合各工作点的转矩和转速数据,可计算电机效率,最终生成电机效率MAP图。图14以电机工作温度40℃为例,展示了在母线电压350 V,电流有效值180 A的情况下,示例电机利用重构磁场计算的电机效率MAP图以及和有限元仿真求解MAP图的对应误差情况。电机MAP图如图14a所示,求解的电机最高效率为97.27%。考虑到误差数值存在正负波动,图14b采用了三维曲面图的形式表征求解误差情况。图14c统计了不同误差区间内电机工作点的数目。绝大部分工作点计算的效率结果和有限元结果相差在-1%~1%之间,更为全面地验证了所提方法泛化的准确性。
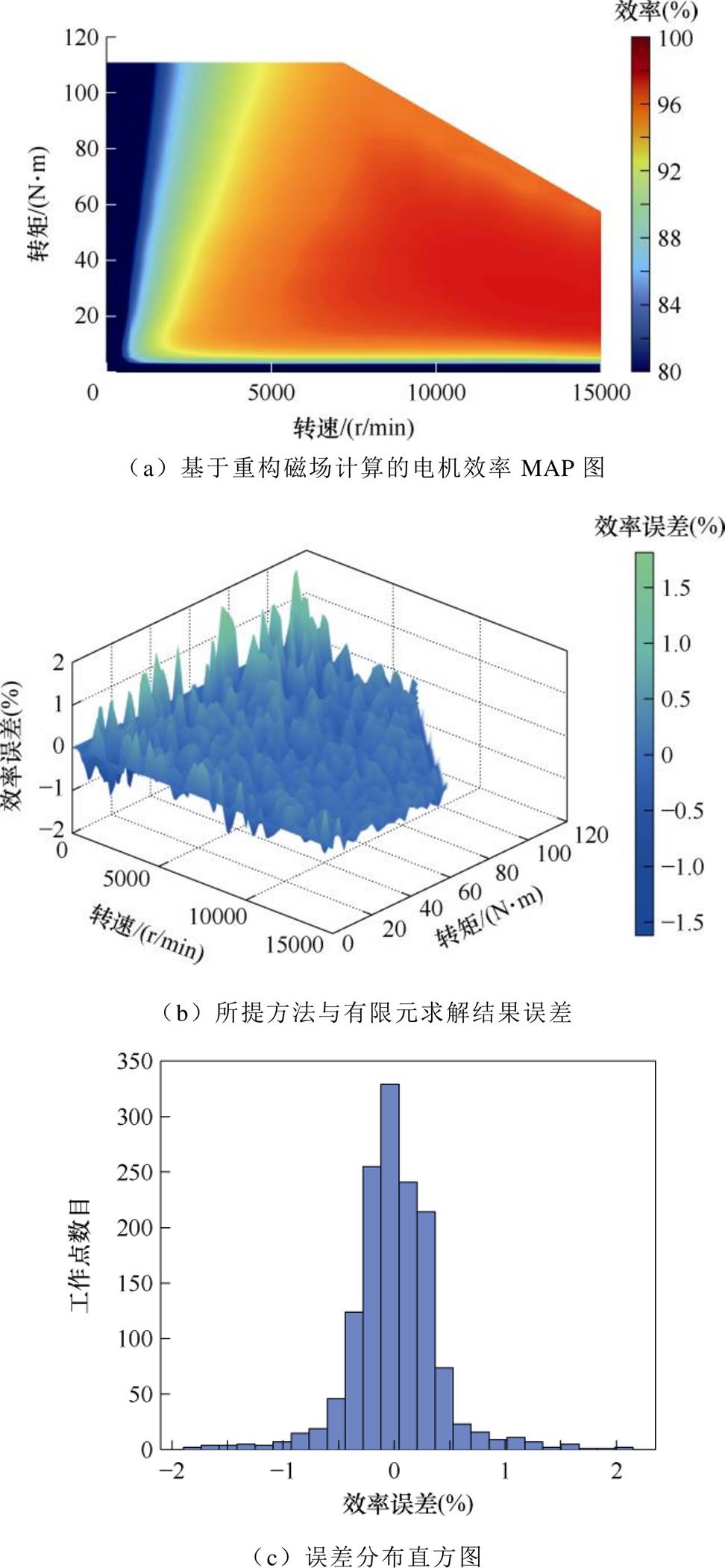
图14 40℃下利用重构磁场计算的电机效率MAP图以及和有限元仿真求解结果误差情况
Fig.14 MAP plot of motor efficiency calculated using reconstructed magnetic field at 40℃ and the corresponding error with finite element simulation
为了进一步体现出迁移学习和插值算法对于训练数据成本的削减,基于数据驱动的训练思路,采集不同温度下的电机磁场数据作为训练集训练BP神经网络作为对照组,神经网络的泛化范围同样为20~100℃,电流激励范围也与40~80 A保持一致。采用拉丁超立方体采样20~100℃内的训练集数据180个工作点,并且额外收集20个工作点的磁场矩阵数据作为验证集。训练数据同样使用有限元仿真的方式获取磁场矩阵。由于训练集中电机工作点的增加,训练集数据的准备时长也相应增长。
对照组神经网络结构与图6a中展示的网络结构一致,唯一的不同在于网络的输入增加,额外包含温度数值,对照组神经网络可以直接输出不同温度下训练范围内工作点的模态结果,进行磁场重构。对照组神经网络的训练过程与前述网络保持一致。当使用验证集数据计算的损失函数收敛时,触发早停机制,结束神经网络的迭代训练。同样以一阶模态为例,对照组的训练时间为521.95 s,远超过表2中统计的20、60和100℃的训练时长总和。对照组与基于迁移学习思想构建的神经网络的训练数据成本及训练总时间统计对比见表3,所提方法在训练数据成本和时间成本方面显著低于纯数据驱动的神经网络方案。
表3 神经网络训练数据及时长对比
Tab.3 Comparison of neural network training data and time duration

方法训练集样本数训练集数据准备时间/h神经网络训练总时长/s 对照组1804.25521.95 所提方法50+20+202.125139.6
取电机工作点对两个方案的泛化精度进行对比。当温度为70℃,电流激励为45.2 A时,结合式(9),分别计算对照组与所提方法重构气隙磁场和有限元仿真结果的误差情况,前10个仿真时间步的平均误差结果如图15所示。对一个电周期所有时间步的误差结果再次求取平均值,获得电周期的平均误差情况,表4列举了随机选取的多个不同温度不同工作点所提方法和对照组的电周期平均误差。从误差结果可以看出,两个方案均能够较好地完成不同温度下磁场的泛化,但是对照组的误差较为明显地高于所提方法。虽然进一步增加训练数据有助于降低对照组的结果误差,但考虑到训练集数据的准备成本和神经网络的训练时间,所提的基于迁移学习和插值结合的方法能够有效地减少泛化过程对于训练数据的需求,更为适合用于不同温度维度下的电机磁场泛化重构。
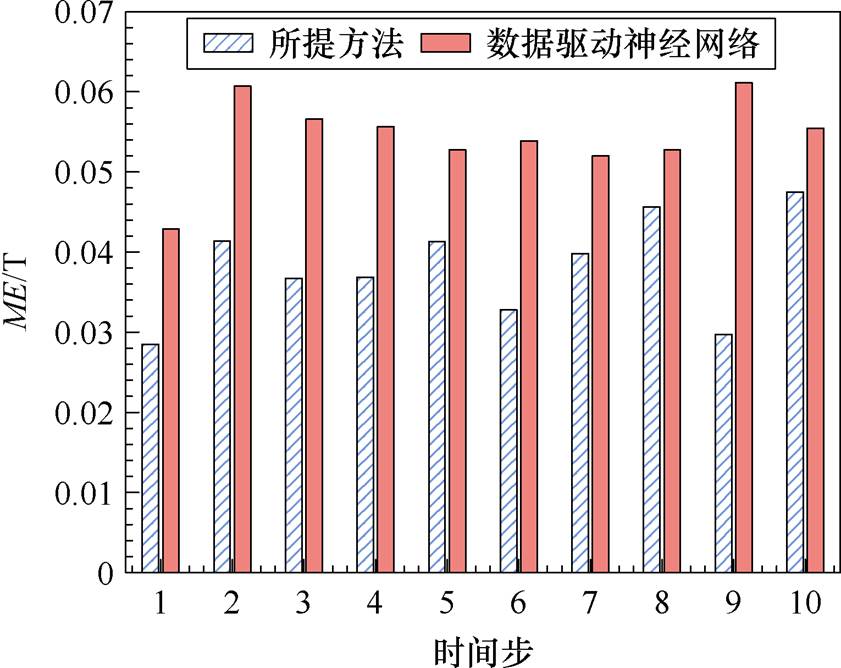
图15 不同时间步平均误差结果对比
Fig.15 Comparison of mean error results for different time steps
表4 神经网络训练结果精度对比
Tab.4 Comparison of the accuracy of neural network training results
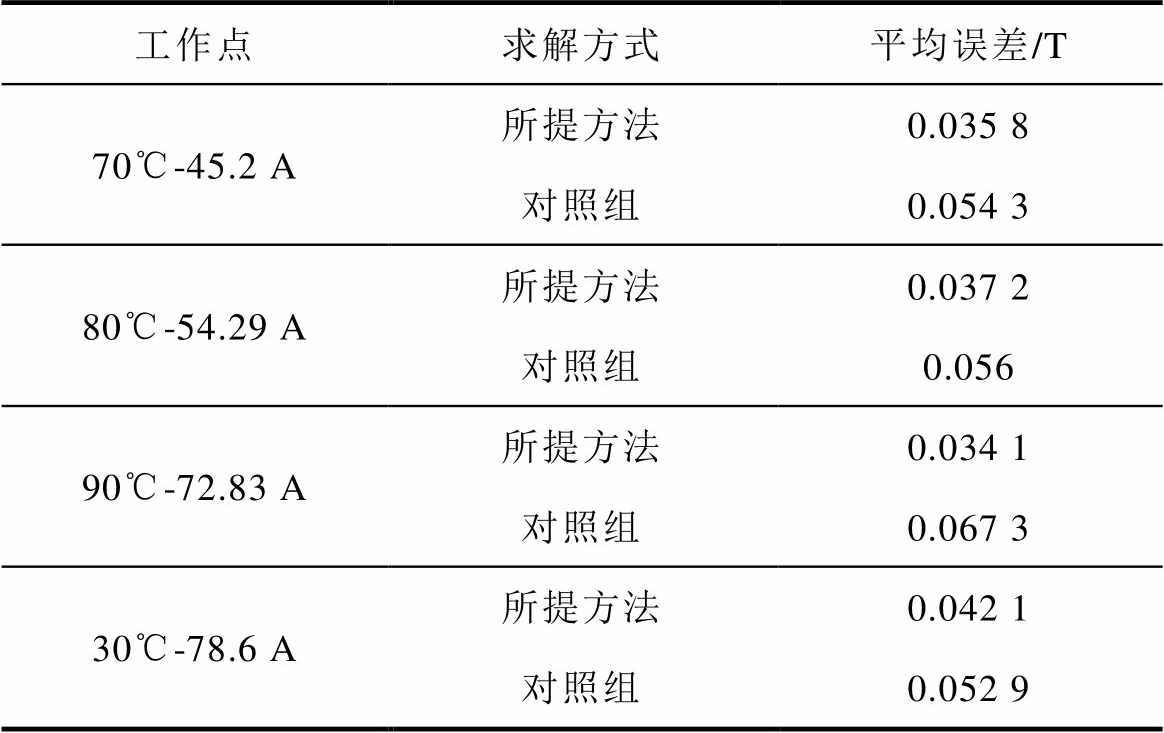
工作点求解方式平均误差/T 70℃-45.2 A所提方法0.035 8 对照组0.054 3 80℃-54.29 A所提方法0.037 2 对照组0.056 90℃-72.83 A所提方法0.034 1 对照组0.067 3 30℃-78.6 A所提方法0.042 1 对照组0.052 9
本文采用BP神经网络与Kriging插值方法结合的分步泛化方法对电机不同工况与工作温度下的磁场进行求解。除了BP神经网络之外,循环神经网络中的长短期记忆(Long Short-Term Memory, LSTM)神经网络、卷积神经网络(Convolutional Neural Network, CNN)也在工程实践和学术研究上被广泛使用。其中,LSTM神经网络适用于处理时序数据,对于长程依赖关系的特殊问题尤为擅长,由于其门控机制的引入对时序噪声具有很强的鲁棒性。CNN适用于空间局部相关数据,如图像处理、频谱分析等,对高维度的输入问题适应性强。典型的神经网络特点对比见表5。
表5 典型的神经网络特点对比
Tab.5 Comparison of typical neural network characteristics
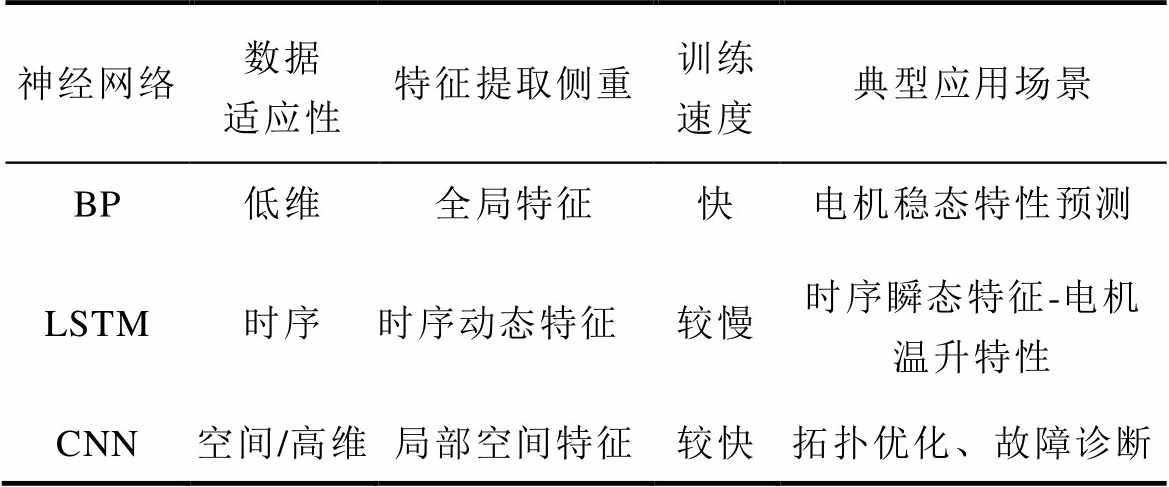
神经网络数据适应性特征提取侧重训练速度典型应用场景 BP低维全局特征快电机稳态特性预测 LSTM时序时序动态特征较慢时序瞬态特征-电机温升特性 CNN空间/高维局部空间特征较快拓扑优化、故障诊断
由于在数据预处理的步骤中,POD方法已经完成了对电机磁场矩阵的降维,有效地降低了网络输入的维度,而CNN适用于处理高维数据或者图像信息输入,因此CNN并不适用于本文所提的泛化框架。LSTM适合时序建模,但本研究中输入为稳态电机工况参数,并不具备时序特征。相较LSTM而言,BP神经网络更适用于构建此类电机工况和磁场模态之间的映射关系。
为了验证理论分析,搭建了对应结构的LSTM神经网络,其输入和输出与BP神经网络保持一致。由于循环神经网络没有隐藏层的概念,在对照结构中设置其纵向堆叠层数为4,和BP网络中的隐藏层数量对应。图16展示了训练过程中BP和LSTM的验证集损失函数收敛情况。LSTM损失函数最小值为0.004 7,而BP神经网络收敛最小值为0.000 3,显著低于LSTM。BP神经网络在电机工作点与磁场模态的映射关系的学习上,表现优于LSTM。
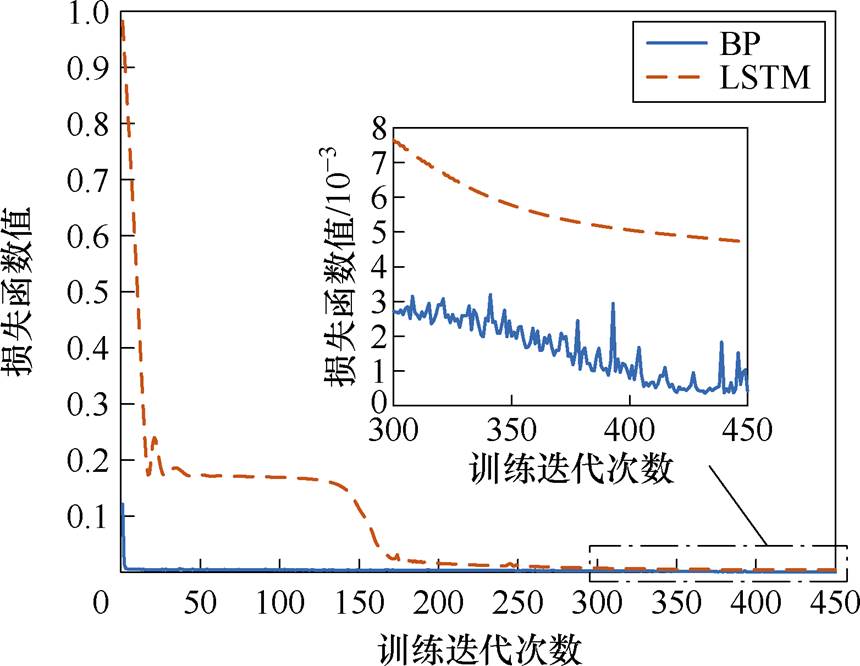
图16 BP和LSTM损失函数变化对比
Fig.16 Comparison of BP and LSTM loss function changes
图17展示了LSTM与样条插值(Spline)的串联方案和所提方案在40℃下电流值71.5 A工作点的气隙径向磁通密度泛化结果,通过与有限元结果的对比,尽管两种方案均能反映磁通密度变化趋势,但LSTM+样条插值蓝色曲线与有限元结果存在显著间隙误差。本文选取的BP+Kriging的组合方式获得的磁通密度结果更为接近有限元结果,证明了所提组合方案在电机磁场的分步泛化方面的优越性。
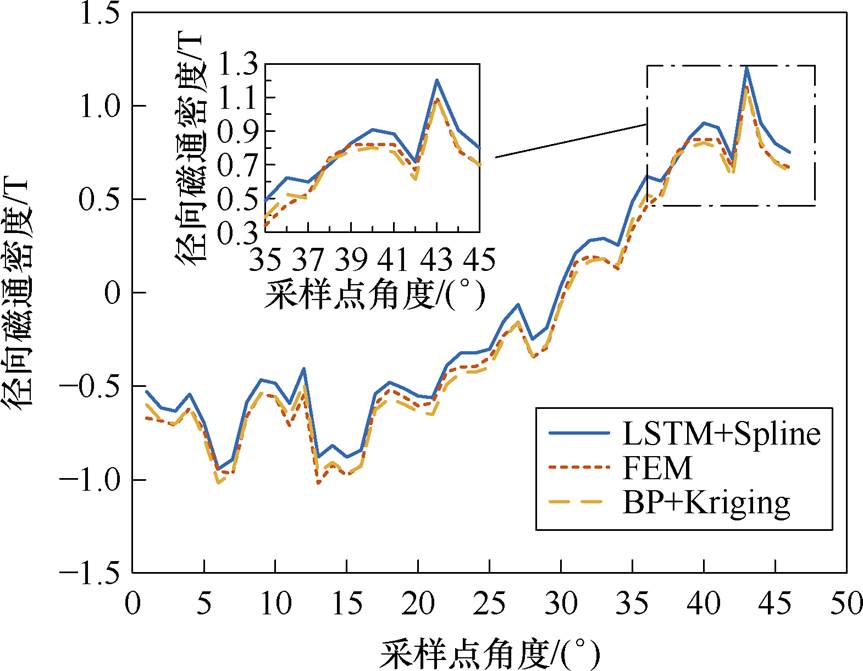
图17 不同泛化组合方式求解的气隙径向磁通密度结果
Fig.17 Results of radial flux density of air gap solved by different generalization combinations
为了验证所提方法在不同温度下的准确性,制备实验样机并且搭建实验平台,实验样机参数与表1参数一致。图18展示了用于测量样机的对拖实验台架情况。其中,水循环冷却加热设备采用勤道机械有限公司定制的12匹冷水机,能够提供0~70℃内特定温度下的冷却液,当样机通冷却液时间足够长时,认为样机永磁体温度与冷却液温度一致,以此实现不同温度下的电机磁场采集。温度巡检仪为东润科技的智能多路巡检仪,连接Pt100温度传感器,温度测量范围为-50~200℃,精度误差±0.6℃,每个温度下冷却液流经电机管道超过3 h,待温度巡检仪的示数稳定后,再进行实验测试。本节选取用以对比验证的所有工作点均未出现在神经网络训练集数据中。
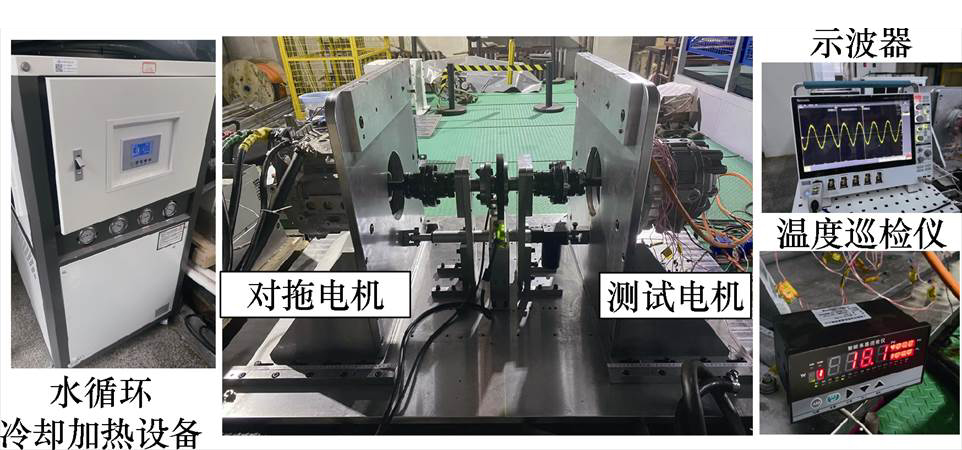
图18 样机实验测试平台
Fig.18 Prototype test platform
选取气隙磁通对重构的电机磁场结果进行验证。电机负载运行时由于相电阻分压的影响,无法直接测量反电动势结果。为解决这个问题,对样机加入探测线圈(Search Coils, SC)。SC绕组开路安装在电机定子槽中,位于三相绕组的主磁通下,利用示波器测量SC反电动势波形,以表征电机气隙磁场[21]。测试样机中SC的布局及局部放大情况如图19所示。当电机运行时,线圈中的磁通量随主磁通量连续变化,其反电动势为
 (15)
(15)
式中,Nsc为探测线圈匝数;fsc为探测线圈磁通。通过示波器和采样电路收集不同温度下的SC反电动势波形,表征电机气隙磁场。实验结果与所提方法重构磁场计算的SC反电动势结果进行对比,验证所提方法的计算精度。
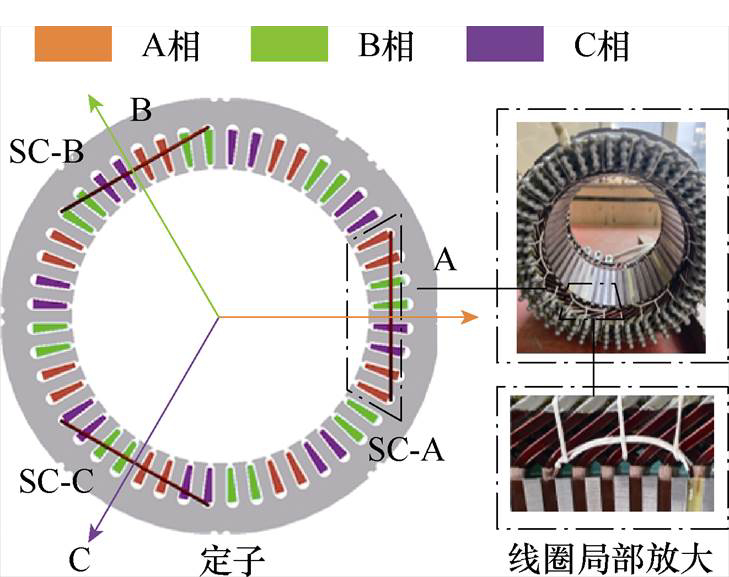
图19 实验样机探测线圈布局
Fig.19 Test prototype search coils layout
当电机工作点变化时,在不同的温度下对比实验结果和计算结果误差情况。挑选固定转速3 000 r/min时在温度点20℃/40℃/60℃、电流点60 A/80 A/100 A进行实验,且每组工况重复3次以验证实验复现性,共进行27组对比验证实验。图20对比了转速3 000 r/min时在20℃-60 A、40℃-80 A、60℃-100 A下采集的SC反电动势波形与所提方法求解获得的结果。两者波形显示出较好的一致性。由于实验波形采样频率较高,一个电周期内的实验结果采样点数远大于所提方法求解磁场波形点数,因此两者在波形局部上存在差异。为了定量评估所提方法与实验结果之间的误差,在更多的工作点下使用所提方法求解的SC反电动势与实验测量结果进行傅里叶分解,两者分解后的基波幅值及误差情况见表6。除此之外,当电流固定为60 A时,在温度点20℃/40℃/60℃、不同转速1 000、2 000、4 000 r/min进行实验,且每组工况重复3次以验证实验复现性,共进行27组对比验证实验。所提方法与实验测量结果分解后的基波幅值及误差情况见表7。
实验测量的与重构磁场求解的SC反电动势基波随温度与电机工作点的变化规律保持一致,求解的反电动势基波幅值与实验测量结果最大误差为2.40%。
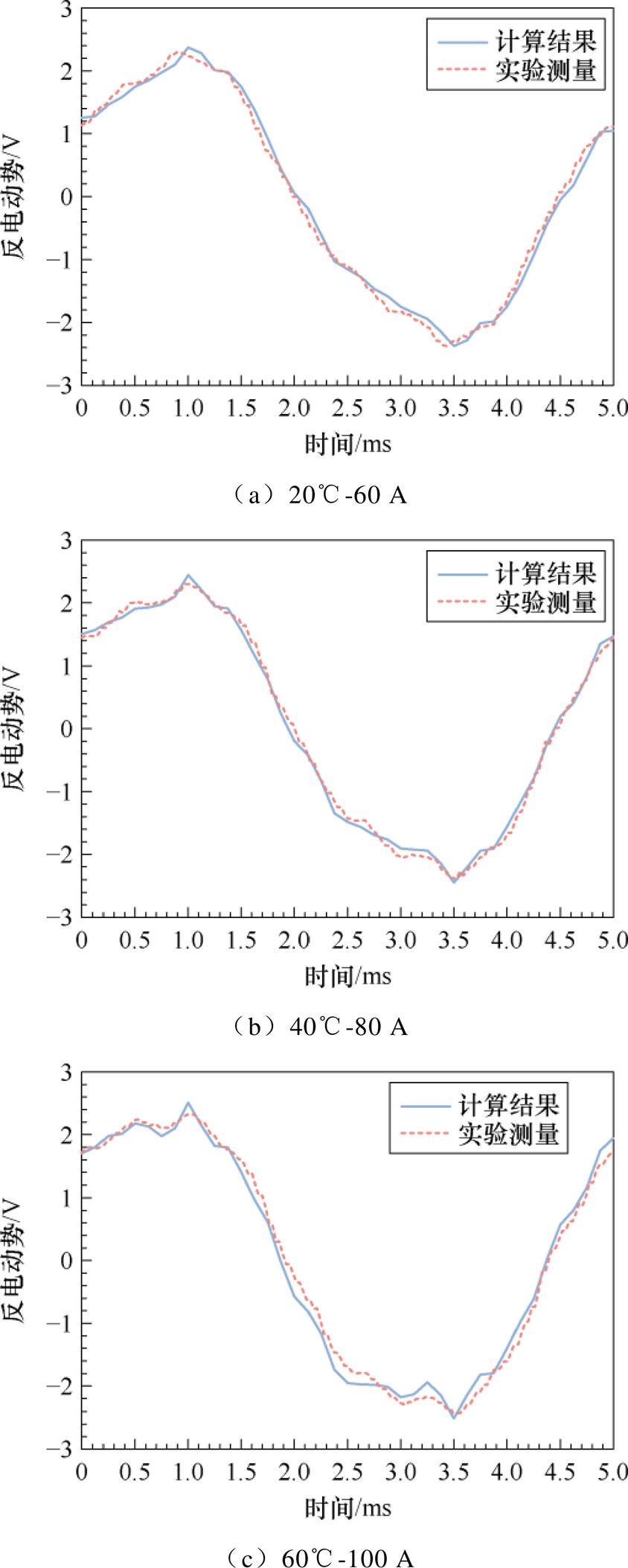
图20 实验SC反电动势波形与所提方法计算结果对比
Fig.20 Comparison of experimental SC electromotive force waveforms with the results of the proposed method
表6 不同电流下SC反电动势基波结果对比
Tab.6 Comparison of SC electromotive force at different current
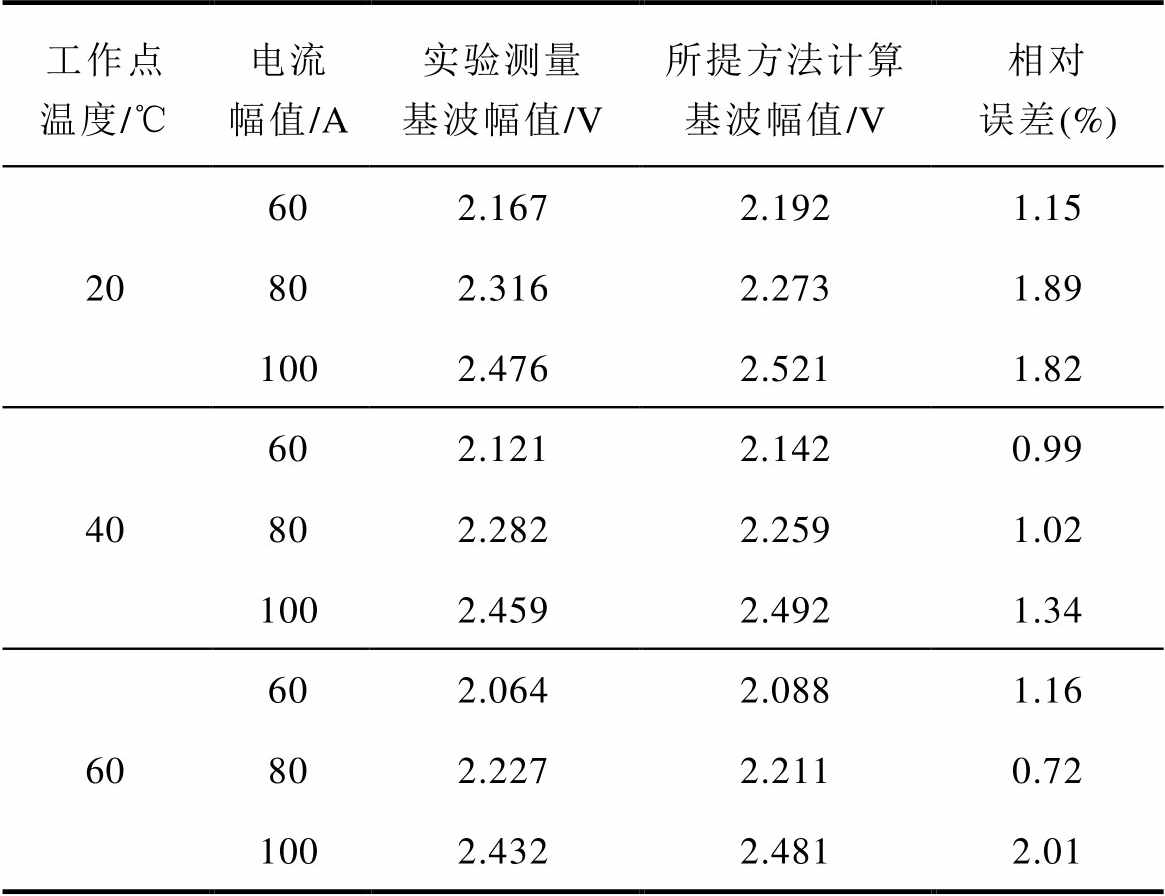
工作点温度/℃电流幅值/A实验测量基波幅值/V所提方法计算基波幅值/V相对误差(%) 20602.1672.1921.15 802.3162.2731.89 1002.4762.5211.82 40602.1212.1420.99 802.2822.2591.02 1002.4592.4921.34 60602.0642.0881.16 802.2272.2110.72 1002.4322.4812.01
误差来源主要有以下两点:①由于实验电机测量探测线圈反电动势时接入的采样电路存在分压,导致探测线圈反电动势有细微的波动;②磁场矩阵在泛化重构过程中精度的损失。总体而言,实验测试的磁场结果与所提方法求解的结果规律一致,验证了本文所提的基于迁移学习思想和Kriging插值算法的电机磁场快速计算方法的有效性。
表7 不同转速下SC反电动势基波结果对比
Tab.7 Comparison of SC electromotive force at different speed
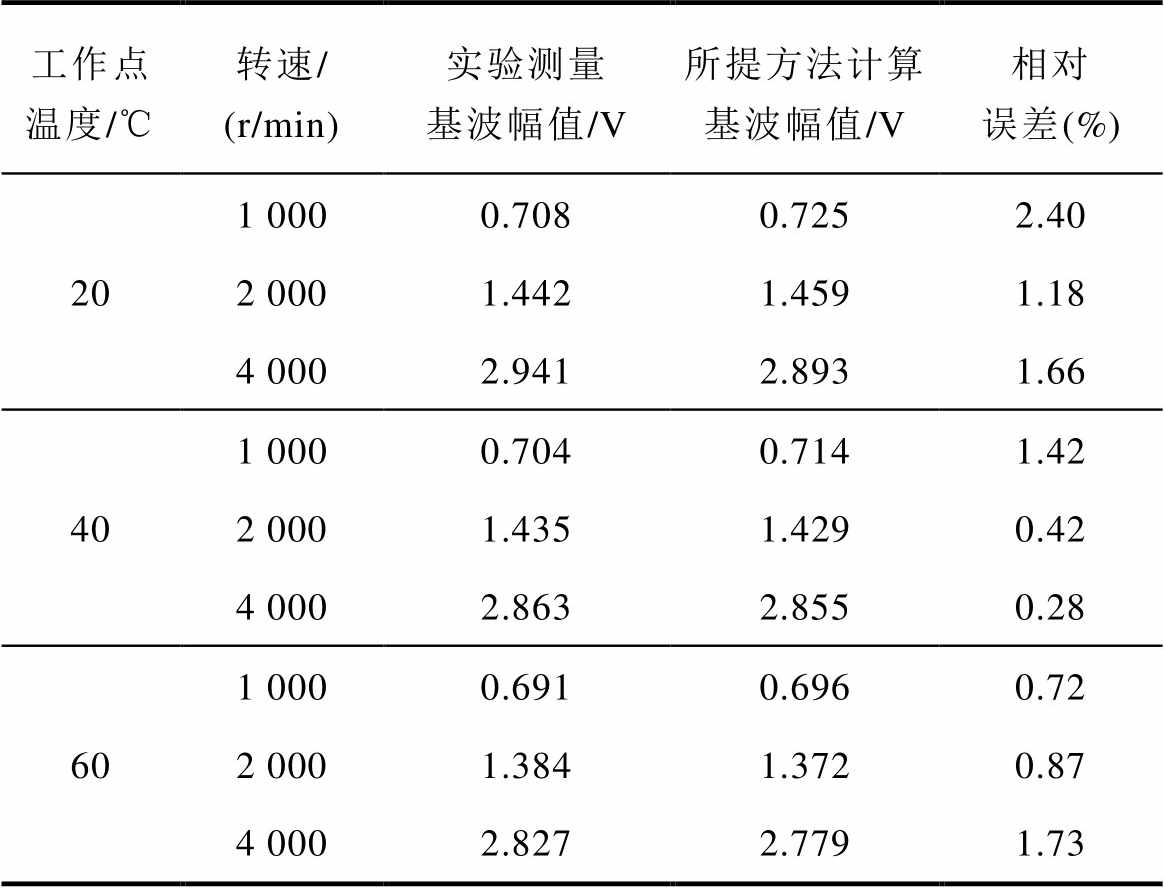
工作点温度/℃转速/(r/min)实验测量基波幅值/V所提方法计算基波幅值/V相对误差(%) 201 0000.7080.7252.40 2 0001.4421.4591.18 4 0002.9412.8931.66 401 0000.7040.7141.42 2 0001.4351.4290.42 4 0002.8632.8550.28 601 0000.6910.6960.72 2 0001.3841.3720.87 4 0002.8272.7791.73
本文针对考虑温度的电磁模型快速求解方案缺失,常规智能算法过于依赖数据驱动导致训练成本过高的问题,提出了一种迁移学习神经网络结合Kriging插值算法的磁场分步泛化方法,实现了训练工况下任意温度和电机工作点磁场结果输出和电机磁场的快速准确计算。通过样机实验,对所提方法精度进行了验证。结论如下:
1)所提方法具有良好的泛化性能,满足不同温度、不同工作点对电机磁场重构快速准确性的要求。求解速度相比于二维有限元提升接近90倍,求解时长与解析法处于同一量级。
2)重构磁场精度与有限元计算结果相近,平均磁通密度误差不超过2.34%,基于重构磁场计算的平均转矩误差不超过2.1%。
3)所提方法有效缩减了神经网络的训练成本,与传统的基于数据驱动的神经网络相比,下降50%的训练集数据成本的同时,基于迁移学习思想的参数冻结方法也使得网络训练时长进一步减少,所提方法网络训练总时长为对照组神经网络的26.74%。
4)制备了带有探测线圈的实验样机,通过探测线圈反电动势和重构磁场计算结果的对比分析,证明了所提方法求解磁场的有效性和准确性。
参考文献
[1] 王柄东, 王道涵, 王晓姬, 等. 交流调磁型永磁同步电机磁通协同调控最大转矩铜耗比控制[J]. 电工技术学报, 2024, 39(12): 3630-3645.
Wang Bingdong, Wang Daohan, Wang Xiaoji, et al. A maximum torque per copper loss control for AC flux-regulation permanent magnet synchronous motor with magnetic flux co-regulation[J]. Transactions of China Electrotechnical Society, 2024, 39(12): 3630- 3645.
[2] 肖宗鑫, 胡明辉, 石力王, 等. 电动汽车内置式永磁同步电机转子温度在线估计[J]. 机械工程学报, 2023, 59(24): 209-222.
Xiao Zongxin, Hu Minghui, Shi Liwang, et al. Rotor temperature online estimation of built-in permanent magnet synchronous motor for electric vehicle[J]. Journal of Mechanical Engineering, 2023, 59(24): 209-222.
[3] 师蔚, 骆凯传, 张舟云. 基于热网络法的永磁电机温度在线估计[J]. 电工技术学报, 2023, 38(10): 2686-2697.
Shi Wei, Luo Kaichuan, Zhang Zhouyun. On-line temperature estimation of permanent magnet motor based on lumped parameter thermal network method[J]. Transactions of China Electrotechnical Society, 2023, 38(10): 2686-2697.
[4] 许孝卓, 郭国宾, 封海潮, 等. 基于代理模型的永磁直线同步电机多目标优化[J]. 电机与控制学报, 2024, 28(11): 139-150.
Xu Xiaozhuo, Guo Guobin, Feng Haichao, et al. Multi-objective optimization of permanent magnet linear synchronous motor based on surrogate model[J]. Electric Machines and Control, 2024, 28(11): 139- 150.
[5] 李响, 郭鹏涛, 丁远. 基于场路结合的大功率直线超声波电机压电-热-结构多物理场分析[J]. 电工技术学报, 2024, 39(2): 423-433.
Li Xiang, Guo Pengtao, Ding Yuan. Piezo-thermal- structure coupling analysis for high-power linear ultrasonic motor based on field-circuit combination method[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 423-433.
[6] 于占洋, 胡旭阳, 李岩, 等. 新型强迫风冷散热结构在高功率密度外转子表贴式PMSM上应用分析[J]. 电工技术学报, 2023, 38(24): 6668-6678.
Yu Zhanyang, Hu Xuyang, Li Yan, et al. Application analysis of novel forced air-cooled in outer rotor surface-mounted PMSM with high power density[J]. Transactions of China Electrotechnical Society, 2023, 38(24): 6668-6678.
[7] 陶飞, 张辰源, 戚庆林, 等. 数字孪生成熟度模型[J]. 计算机集成制造系统, 2022, 28(5): 1267-1281.
Tao Fei, Zhang Chenyuan, Qi Qinglin, et al. Digital twin maturity model[J]. Computer Integrated Manufa- cturing Systems, 2022, 28(5): 1267-1281.
[8] Tong Wenming, Sun Ruolan, Li Shiqi, et al. Loss and thermal analysis for high-speed amorphous metal PMSMs using 3-D electromagnetic-thermal bi- directional coupling[J]. IEEE Transactions on Energy Conversion, 2021, 36(4): 2839-2849.
[9] 卓亮, 孙鲁, 施道龙, 等. 考虑温度变化的高温高速永磁电机转子涡流损耗半解析模型及实验验证[J]. 中国电机工程学报, 2021, 41(24): 8305-8315.
Zhuo Liang, Sun Lu, Shi Daolong, et al. Semi- analytical model and experimental verification of rotor eddy current loss of high temperature high speed permanent magnet machine considering temperature change[J]. Proceedings of the CSEE, 2021, 41(24): 8305-8315.
[10] Cheng Yuan, Wang Yao, Sun Haodong, et al. Model order reduction based DQ axis parameter extraction method for IPMSMs[C]//2024 International Conference on Electrical Machines (ICEM), Torino, Italy, 2024: 1-7.
[11] Far M F, Martin F, Belahcen A, et al. Real-time control of an IPMSM using model order reduction[J]. IEEE Transactions on Industrial Electronics, 2021, 68(3): 2005-2014.
[12] 王耀, 程远, 高博, 等. 基于有限元降阶泛化的扁线绕组交流损耗快速计算方法[J]. 电工技术学报, 2025, 40(18): 5832-5844.
Wang Yao, Cheng Yuan, Gao Bo, et al. Fast calculation of AC losses in flat wire windings based on finite element reduced order generalization method[J]. Transactions of China Electrotechnical Society, 2025, 40(18): 5832-5844.
[13] 谢冰川, 张岳, 徐振耀, 等. 基于代理模型的电机多学科优化关键技术综述[J]. 电工技术学报, 2022, 37(20): 5117-5143.
Xie Bingchuan, Zhang Yue, Xu Zhenyao, et al. Review on multidisciplinary optimization key tech- nology of electrical machine based on surrogate models[J]. Transactions of China Electrotechnical Society, 2022, 37(20): 5117-5143.
[14] 朱新凯, 刘雅斌, 王景霞, 等. 基于非支配排序遗传算法与神经网络的20MW双定子超导磁场调制电机优化设计[J]. 中国电机工程学报, 2025, 45(15): 6103-6115.
Zhu Xinkai, Liu Yabin, Wang Jingxia, et al. Optimal design of 20MW double-stator superconducting magnetic field modulation electrical machine based on non-dominated sorting genetic algorithm and neural network[J]. Proceedings of the CSEE, 2025, 45(15): 6103-6115.
[15] 曹阳, 刘旭. 计及损耗的混合励磁电机建模与硬件在环实时仿真系统[J]. 电工技术学报, 2020, 35(22): 4657-4665.
Cao Yang, Liu Xu. Modeling method for hybrid- excited machine and hardware-in-loop real-time simulation system with accounting for loss calcu- lation[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4657-4665.
[16] 鲍明堃, 周扬忠. 基于复合神经网络重构对象的永磁同步直线电机变参数型位移速度并行控制[J]. 电工技术学报, 2024, 39(8): 2470-2484.
Bao Mingkun, Zhou Yangzhong. Parallel dis- placement velocity control of permanent magnet synchronous linear motor with variable parameters based on composite neural network reconstruction object[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2470-2484.
[17] Bellman R. Dynamic Programming[M]. Princeton Princeton: University Press, 1957.
[18] Ashraf M, Anowar F, Setu J H, et al. A survey on dimensionality reduction techniques for time-series data[J]. IEEE Access, 2023, 11: 42909-42923.
[19] Chu Shuaijun, Liang Deliang, Jia Shaofeng, et al. Research and analysis on design characteristics of high-speed permanent magnet claw pole motor with soft magnetic composite cores for wide temperature range[J]. IEEE Transactions on Industry Applications, 2022, 58(6): 7201-7213.
[20] Nielsen M A. Neural Networks and Deep Learning[M]. San Francisco: Determination Press, 2015.
[21] Yao Kai, Du Bochao, Li Jianhua, et al. Torque closed-loop flux-weakening control of IPMSM based on search coils[J]. IEEE Transactions on Industrial Electronics, 2025, 72(1): 122-133.
A Stepwise Generalized Real-Time Solution for the Magnetic Field of Automotive Drive Motors Considering Temperature Effects
Abstract Accurate and fast quantification of the effect of temperature on electromagnetic performance is of great significance for reliable operation, condition monitoring, and optimized design of motors. However, the working conditions of automotive permanent magnet synchronous drive motors are complex, and the working temperature is dynamic and variable. The motor's excitation characteristics change with temperature, and its magnetic circuit exhibits highly nonlinear behavior. It is difficult to obtain a fast, accurate solution for the magnetic field that accounts for temperature using traditional finite-element or thermal-network methods. This paper proposes a fast solution method for the magnetic field with stepwise generalization across different temperatures and motor operating points.
First, an electromagnetic simulation model of the motor accounting for temperature is established, and the magnetic field matrix is extracted from the simulation results. Secondly, a step-by-step generalization-solving method is proposed based on a migration-learning neural network and an interpolation algorithm. The magnetic field matrix is reduced using the POD algorithm to construct a low-dimensional feature space, and a neural network is trained to learn magnetic field features at different temperatures. The neural network and Kriging interpolation algorithm construct the mapping relationship of operating the point-temperature-magnetic field step by step. Finally, a prototype experimental platform is built to verify the proposed method.
The results show that the proposed method calculates the magnetic field over a complete electric cycle in 0.95 s, which is 1.12% of the time required by the finite element method. The relative error of the reconstructed average magnetic density in the generalized range does not exceed 2.34%. The proposed step-by-step generalization strategy provides a new way to solve the complex temperature-magnetic field interactions in multi-field coupling of electric machines.
The following conclusions can be drawn. (1) The proposed method has good generalization performance and meets the requirements of fast and accurate magnetic field reconstruction. (2) The proposed method effectively scales down the training cost of the neural network. Compared with a traditional data-driven neural network trained on 50% of the training set, the parameter freezing method further reduces network training time. The total training time of the network in the proposed method is 26.74% that of the neural network in the control group. (3) An experimental prototype with search coils is prepared, and the proposed method is verified.
keywords:Permanent magnet synchronous machine, stepwise generalization, transfer learning, magnetic field computing
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250947
黑龙江省“双一流”新一轮建设学科协同创新成果建设资助项目(LJGXCG2022-065)。
收稿日期2025-06-04
改稿日期 2025-06-23
王 耀 男,1998年生,博士研究生,研究方向为电机数字孪生建模、高精度损耗分析、多物理场耦合及优化。
E-mail: 21b906003@stu.hit.edu.cn
丁 岭 男,1994年生,博士后,副研究员,研究方向为AI辅助的电机多物理场设计和优化、永磁同步电机稳健优化与高精度损耗分析、电机多目标智能优化、复杂机电系统多物理建模技术。
E-mail: dingling@hitzri.cn(通信作者)
(编辑 崔文静)