基于频率控制的双边LCL型无线电能传输系统抗偏移方法
左 月1 孙 跃1,2 陈丰伟1,2 胡 韩1 苏婧媛3
(1. 重庆大学自动化学院 重庆 4000432. 无线电能传输技术国家级国际联合研究中心 重庆 4000433. 重庆科技大学电子与电气工程学院 重庆 401331)
摘要 针对磁耦合式无线电能传输(MC-WPT)系统耦合机构偏移所造成的输出电压不稳定和效率低下问题,该文提出一种基于频率控制的双边LCL-WPT系统抗偏移方法。首先阐述双边LCL-WPT系统结构,分析系统恒压输出特性及抗偏移特性,建立系统频率与耦合系数的数学模型,揭示基于频率控制的双边LCL-WPT系统抗偏移原理;其次为进一步提升系统抗偏移能力及其综合性能,分析系统初始参数对频率控制范围、输入阻抗角范围及传输效率的影响,并给出系统参数设计过程;再次考虑到系统频率控制需基于发射端逆变器完成,给出一种基于发射端检测的频率控制策略,通过频率控制能够实现系统在偏移下的恒压输出;最后搭建实验装置,验证了该文所提出的基于频率控制的双边LCL-WPT系统抗偏移方法的可行性和有效性。实验结果表明,在耦合系数为0.203~0.498的偏移范围内可以实现系统的电压稳定输出,且传输效率大于80.063%。
关键词:抗偏移 恒压输出 双边LCL-WPT 参数设计 频率控制
0 引言
无线电能传输(Wireless Power Transfer, WPT)技术由于其安全、灵活、可靠等优点自提出以来得到国内外学者广泛的研究[1],在电力电子变换[2]、电磁耦合[3]、系统机理[4]、系统控制[5]及能信同传[6]等方面取得了大量成果。其中以磁耦合式无线电能传输(Magnetic Coupling-Wireless Power Transfer, MC-WPT)技术研究最为热门,目前已经成功地应用于电动汽车[7-9]、无人机及无人车[10-11]、水下无人设备[12-13]等多个领域。
MC-WPT技术的实现依赖于系统各部分的精准配合,耦合机构作为MC-WPT系统中至关重要的组成部分,在实际应用中,常由于工作环境、装置结构或工程需求等因素,使得耦合机构的发射端和拾取端的相对位置不能固定,从而造成耦合机构的偏移,使其互感发生变化,进而导致耦合系数的变化,由此带来了系统无功功率增大、传输效率降低、系统不稳定等问题[14]。针对此偏移问题已有很多学者对其进行了研究,主要是从耦合机构抗偏移设计、谐振网络抗偏移设计和控制技术三个方面来实现。
基于耦合机构设计的抗偏移方法主要是通过对耦合机构的机械结构设计、磁心结构设计及线圈绕制方式设计来提高耦合机构在偏移下的耦合系数,以提升系统的抗偏移能力。文献[15]中提出了一种D.D.D型耦合机构模型,在DLDD结构基础上优化了线圈结构,减少了线圈数量和线圈的用铜量,能够提升系统在二维平面的抗偏移能力。文献[16]中借用组合式线圈结构的平面式六边形矩阵耦合机构,将三层六边形阵列交错放置,多层线圈的磁通密度峰点与谷点相互叠加,使二维充电平面磁场更为均匀。文献[17]将耦合机构的自由度从二维拓展到三维空间,提出了一种具有三维全方位磁能发射能力的环形偶极线圈,结合三维旋转磁场调控方法能使接收线圈在任意方位均能捕获磁能。基于谐振网络设计的抗偏移方法主要是通过对谐振网络参数的设计使其具有一定的偏移容忍度。文献[18]中提出了一种一次侧失谐的串联-串联(Series-Series, SS)型补偿拓扑及其参数设计方法,在耦合系数为0.117~0.22的变化范围内,系统的输出功率波动程度能保持在20%以内,且系统效率维持在76%以上。文献[19]提出一种基于钳位电路的LCC-S型MC-WPT系统,该系统中的钳位电路可根据耦合系数变化自适应地导通或关断,以调节工作模态,在耦合系数为0.205~0.42的变化范围内,能够保证输出功率波动始终保持在3.2%以内。文献[20]提出了基于混合拓扑的抗偏移方法,将LC-LC和LCL-LCL通过串联的形式组合,并结合DD型耦合机构,在x方向偏移-80~120 mm,y方向偏移±160 mm和z方向偏移±20 mm时,能够保证系统输出功率波动小于5%。以上研究为解决MC-WPT系统耦合机构偏移问题提供了研究思路,但耦合机构和谐振网络的设计常常受装置体积、质量及形状的限制较多,特别是耦合机构的设计常常受实际工程的约束,其结构及参数一旦确定,对应的抗偏移能力也随之确定,不具有实时控制与调整的能力。
基于控制技术的抗偏移方法具有动态调节能力,能够在上述基于耦合机构或谐振网络抗偏移的基础上进一步提升系统的抗偏移性能。文献[21-22]中提出了基于电容、电感的动态参数调节方法,通过开关的切换实现对电容或电感值的调控,从而实现偏移下的动态谐振。文献[23]中引入 控制器,提出了一种基于输出端电压控制的抗偏移方法,通过对输出端的电压进行检测,由控制器对电压信号进行处理进而对发射端Boost电路的开关管进行控制,以实现系统的恒压输出。文献[24]中引入DC-DC变换器,通过移相控制的方法,在负载和耦合系数变化的情况下能够实现系统的恒压输出和恒流输出。文献[25]提出了一种基于负载端电流检测的鲁棒控制抗偏移方法,通过对负载端电流的检测,采用径向基函数神经网络在线训练的方法对信号进行分析处理,进而对逆变器驱动信号进行控制,以实现系统的恒流输出。文献[26]提出了一种基于拾取端电流检测的变频抗偏移方法,通过检测拾取线圈的电流相位,调节逆变器频率使其与逆变器输出电压之间的相位差为0°,从而实现系统的恒压输出。以上方法从控制角度有效地提升了系统抗偏移能力,但都需增加额外的DC-DC电路,或建立系统发射端与拾取端通信,当存在通信时延或在极端电磁环境下时,通信可靠性会降低,容易造成系统控制不稳定。
控制器,提出了一种基于输出端电压控制的抗偏移方法,通过对输出端的电压进行检测,由控制器对电压信号进行处理进而对发射端Boost电路的开关管进行控制,以实现系统的恒压输出。文献[24]中引入DC-DC变换器,通过移相控制的方法,在负载和耦合系数变化的情况下能够实现系统的恒压输出和恒流输出。文献[25]提出了一种基于负载端电流检测的鲁棒控制抗偏移方法,通过对负载端电流的检测,采用径向基函数神经网络在线训练的方法对信号进行分析处理,进而对逆变器驱动信号进行控制,以实现系统的恒流输出。文献[26]提出了一种基于拾取端电流检测的变频抗偏移方法,通过检测拾取线圈的电流相位,调节逆变器频率使其与逆变器输出电压之间的相位差为0°,从而实现系统的恒压输出。以上方法从控制角度有效地提升了系统抗偏移能力,但都需增加额外的DC-DC电路,或建立系统发射端与拾取端通信,当存在通信时延或在极端电磁环境下时,通信可靠性会降低,容易造成系统控制不稳定。
针对上述问题,本文综合MC-WPT系统中的谐振网络设计与控制技术,提出了一种基于频率控制的MC-WPT系统动态抗偏移方法。选取WPT系统中应用较为广泛的双边LCL谐振拓扑系统作为研究对象[27],首先给出双边LCL-WPT(具有双边LCL谐振拓扑的无线电能传输系统)的基本结构,分析双边LCL-WPT系统恒压输出特性及其抗偏移特性,阐述其基于频率控制的抗偏移原理并给出数学模型。在此基础上分析基于频率控制的双边LCL-WPT系统初始参数对其传输性能的影响,并给出系统初始参数设计过程。为避免系统发射端与拾取端通信,进而给出一种基于发射端电流电压检测的频率控制策略。最后搭建实验样机,通过实验对本文提出的基于频率控制的双边LCL-WPT系统抗偏移方法进行验证。
1 双边LCL-WPT系统特性
1.1 双边LCL-WPT系统结构
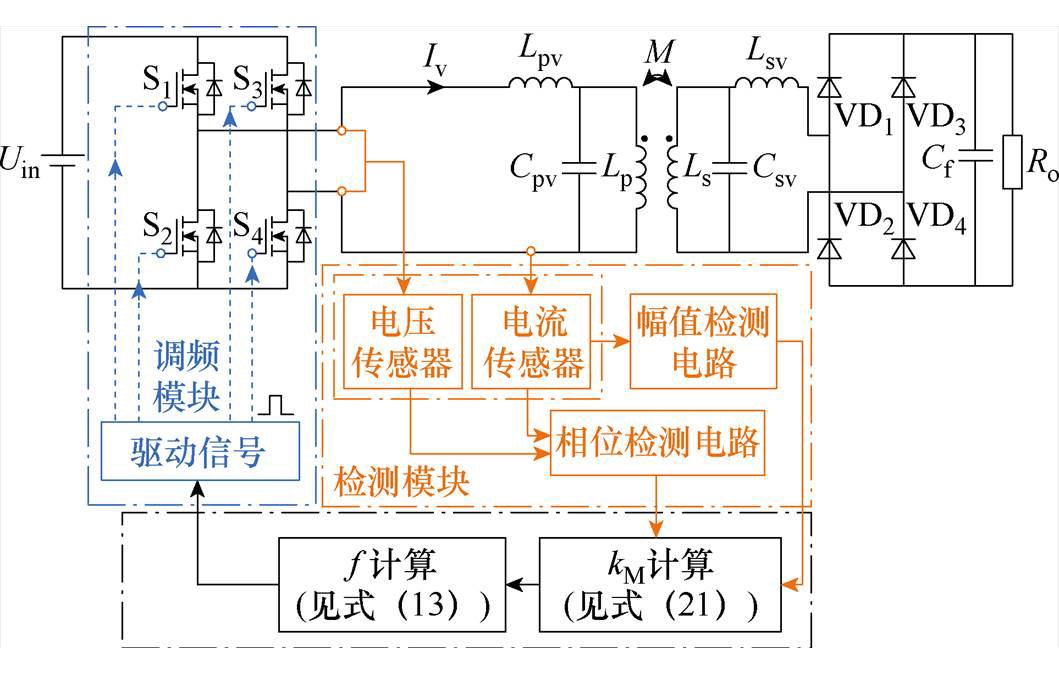
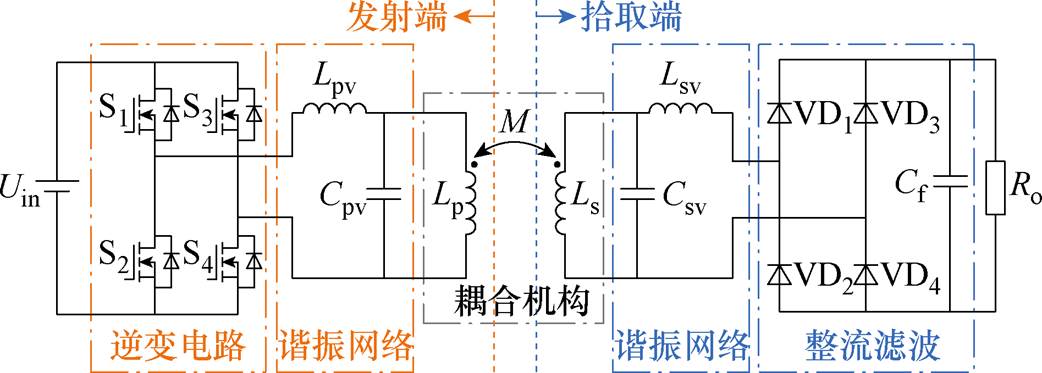
图1展示了双边LCL-WPT系统典型拓扑。图中,Lpv、Cpv构成发射端谐振网络,Lsv、Csv构成拾取端谐振网络,Lp、Ls分别为发射线圈和拾取线圈的自感,M为耦合机构互感。能量传递时,发射端直流电源Uin输入由S1~S4构成的高频逆变电路中,经发射端谐振网络注入发射线圈后产生高频磁场;接收线圈在高频磁场的作用下产生感应电压,经拾取端谐振网络后由VD1~VD4构成的整流桥和滤波电容Cf转换为直流电,为负载Ro提供电能补给。
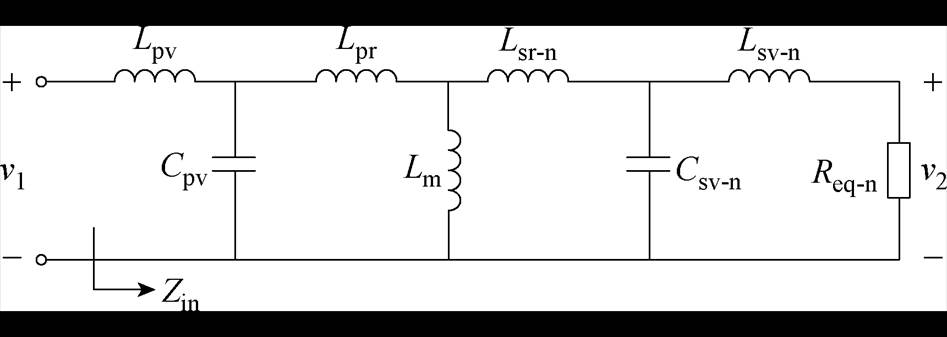
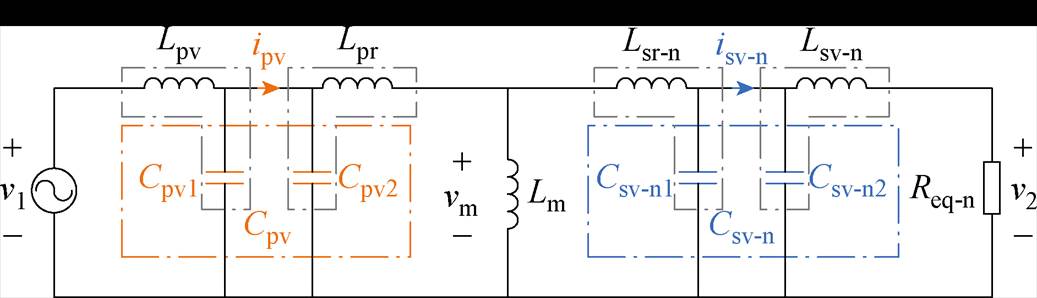
为了简化分析,定义v1为图1中逆变后的基波电压有效值, 为整流前的等效负载,v2为等效负载端的输出电压,同时根据漏感模型对耦合机构进行等效折算,简化后的系统电路拓扑如图2所示。图中,Lpr为发射端等效漏感,Lsr-n为拾取端折算后的等效漏感,Lm为等效励磁电感,Lsv-n、Csv-n分别为拾取端谐振网络折算后的电感、电容。
为整流前的等效负载,v2为等效负载端的输出电压,同时根据漏感模型对耦合机构进行等效折算,简化后的系统电路拓扑如图2所示。图中,Lpr为发射端等效漏感,Lsr-n为拾取端折算后的等效漏感,Lm为等效励磁电感,Lsv-n、Csv-n分别为拾取端谐振网络折算后的电感、电容。
结合图2,根据电路理论有
式中,n为等效匝比, 。
。
为进一步分析系统传输特性,定义Gv为系统电压增益,根据图2可计算得到
其中
式中, 为耦合系数,
为耦合系数, 。
。
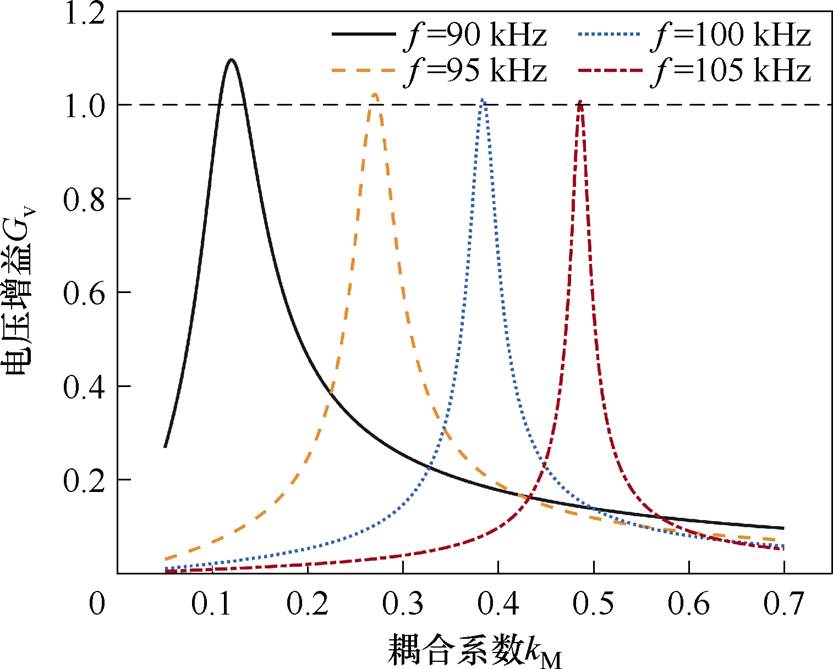
根据式(2)、式(3),在系统初始参数一定的情况下,图3给出了电压增益Gv在不同频率下随耦合系数变化的曲线。从图3中可以看出,当耦合机构发生偏移时,耦合系数的改变将导致系统电压增益发生变化,但通过频率的控制可以使系统保持电压增益恒定,因此本文具体研究基于频率控制的系统抗偏移方法。
1.2 系统恒压输出特性分析
将图2中发射端和拾取端的补偿电容分别等效为Cpv1、Cpv2、Csv-n1、Csv-n2,双边LCL-WPT系统等效电路模型如图4所示。图中ipv为流入Lpr和Cpv2的等效电流,isv-n为流入Lsv-n和Csv-n2的等效电流,vm为等效励磁电感的电压,此时有
当图4中的4个补偿网络(Lpv-Cpv1、Lpr-Cpv2、Lsr-n-Csv-n1、Lsv-n-Csv-n2)都满足LC谐振关系时,即
则图4中的4个补偿网络分别具有恒压输入-恒流输出、恒流输入-恒压输出、恒压输入-恒流输出、恒流输入-恒压输出特性,即
 (6)
(6)
根据式(1)、式(5)和式(6),系统输出电压表示为
由式(7)可知,当双边LCL电路满足式(5)的谐振关系时,在系统输入电压一定的情况下,系统输出电压与负载无关,系统具有恒压输出特性。
1.3 系统抗偏移特性分析
当系统耦合机构发生偏移即互感发生变化时,根据式(1),电路参数 、
、 、
、 也随之变化,将不再满足式(5)的谐振状态,系统输出电压也不再恒定。
也随之变化,将不再满足式(5)的谐振状态,系统输出电压也不再恒定。
根据上述分析,此时若仍要保证系统恒压输出特性,则需要系统在新的偏移状态下满足式(5)的谐振关系。结合双边LCL-WPT系统电路结构特性,可通过对 、
、 的数值进行重新分配,使系统实现在新的频率点
的数值进行重新分配,使系统实现在新的频率点 达到谐振状态,即
达到谐振状态,即
重新分配时,对Cpv1、Cpv2、Csv1、Csv2进行调整,但Cpv1+Cpv2、Csv1+Csv2保持不变,即
 (9)
(9)
对于任一偏移状态下的系统,当其满足式(8)的谐振关系时,根据式(5)~式(7),系统均具有恒压输出特性,考虑到式(8)中的等效电容 、
、 、
、 、
、 在实际应用中不可计算,可将其转换为式(10)所示的数学模型,即当电路参数始终满足式(10)的谐振关系时,系统具有恒压输出特性。
在实际应用中不可计算,可将其转换为式(10)所示的数学模型,即当电路参数始终满足式(10)的谐振关系时,系统具有恒压输出特性。
为使式(10)在不同偏移下恒成立,结合式(1)对其进行化简,得到与互感无关的参数关系如式(11)所示,即当系统参数满足式(11)时,系统始终具有恒压输出特性。
 (11)
(11)
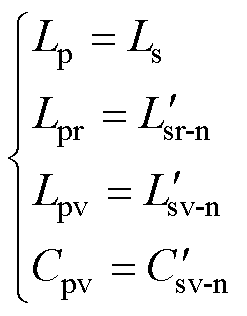
记 ,显然,当n=nL=1时,式(10)、式(11)恒成立。为简化分析,本文后续的研究均
,显然,当n=nL=1时,式(10)、式(11)恒成立。为简化分析,本文后续的研究均
基于n=nL=1展开,对此有
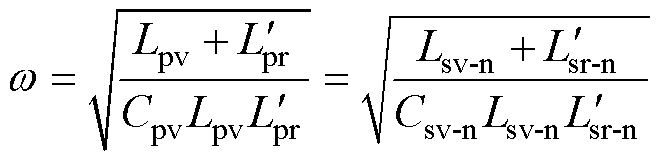
由 ,得到偏移下具有恒压输出特性时的系统工作频率f的数学模型为
,得到偏移下具有恒压输出特性时的系统工作频率f的数学模型为
 (13)
(13)
式中,Lp、Lpv、Cpv均为系统初始参数。
显然,当系统初始参数一定时,式(13)中频率f与耦合系数kM具有单调对应的关系,即当耦合机构发生偏移时,使系统具有恒压输出特性的工作频率f与耦合系数kM总是唯一对应。
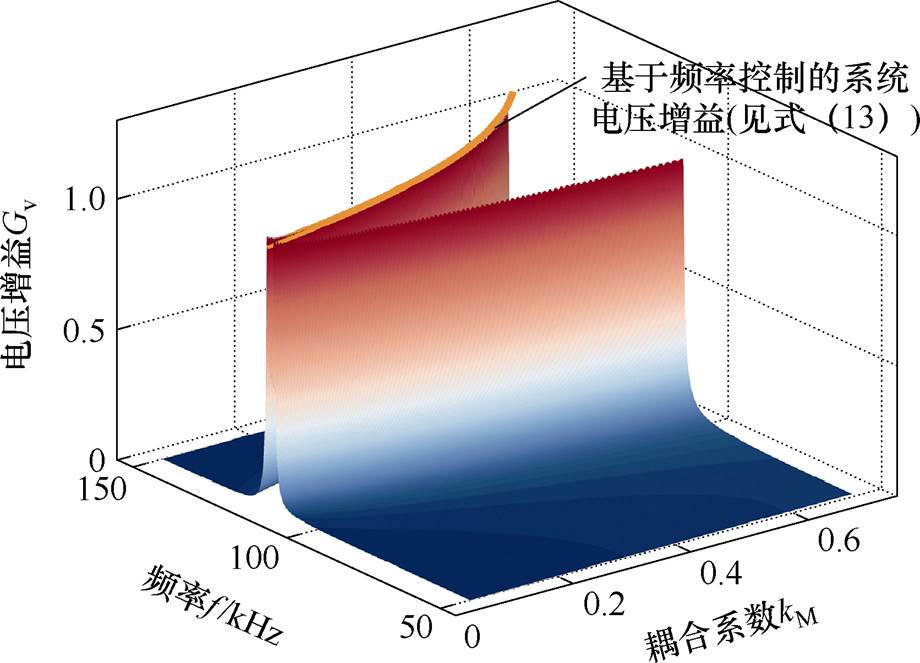
基于式(2)和式(13),图5给出了系统电压增益随频率和耦合系数变化的曲面/曲线,其中曲面对应基于式(2)的系统电压增益随频率和耦合系数的变化关系,曲线对应为基于式(13)的频率控制下系统电压增益随频率和耦合系数的变化关系。从图5中可以看出,当系统耦合系数任意变化时,系统电压增益也随之变化,但当系统耦合系数变化的同时对系统谐振频率进行调节,使其满足式(13)的谐振关系时,可使系统电压增益始终保持恒定。
综上所述,对于图4中的双边LCL-WPT系统而言,当耦合机构偏移导致系统耦合系数变化时,在不改变系统谐振电容、电感的情况下,只需要对系统谐振频率进行调节,使其始终满足式(13)的谐振关系,即可实现系统在偏移下的恒压输出。
2 基于频率控制的系统参数设计
当系统耦合系数变化时,可以在不改变系统初始参数Lp、Lpv、Cpv的情况下,通过频率控制实现系统在偏移下的恒压输出,但由于系统初始参数对系统传输特性及抗偏移能力仍有影响,本节将进一步分析系统初始参数设计方法。
2.1 约束条件
1)谐振频率
MC-WPT系统中较高的谐振频率会增加耦合线圈内阻,增大元器件的开关应力,同时较低的谐振频率会增大电路中的谐振电流,对电路过电流能力要求较高,因此合理地设计系统频率控制范围十分重要。
根据式(13),系统初始参数Lp、Lpv、Cpv均对系统谐振频率调节范围有影响,其中谐振电容Cpv越大,系统谐振频率越小。
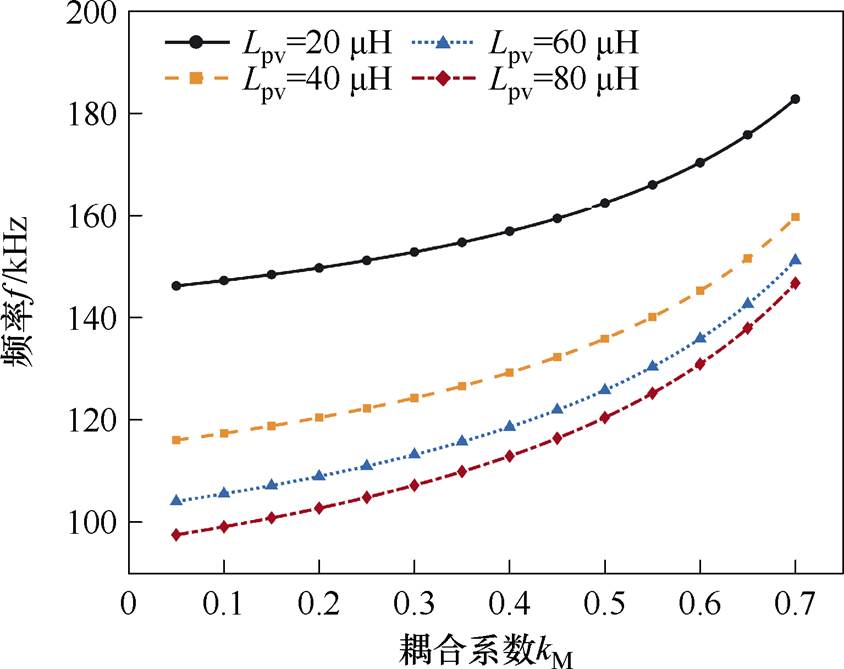
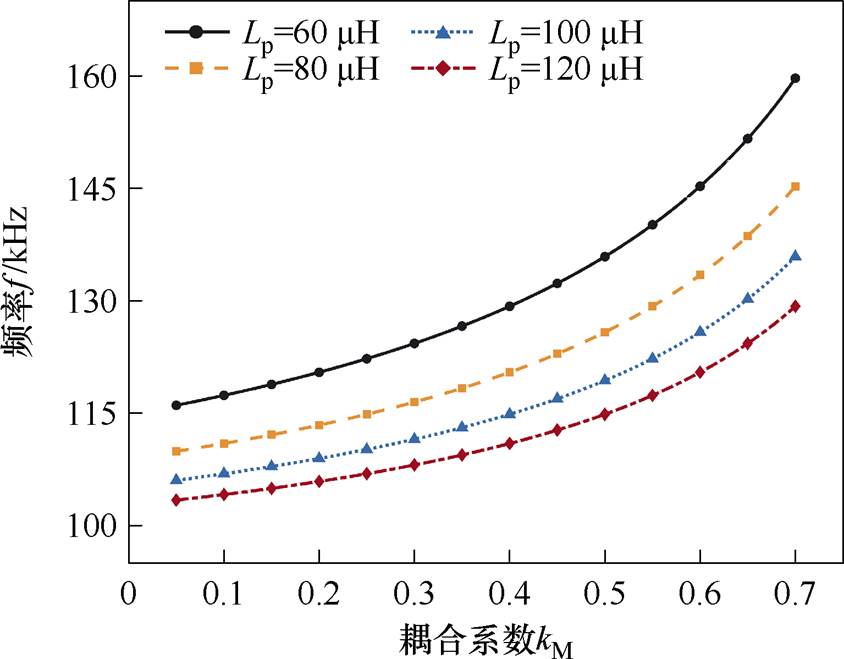
为了进一步分析Lpv和Lp对系统谐振频率的影响,图6、图7给出了系统频率f在不同Lpv、Lp下随耦合系数的变化曲线。从图中可以看出,系统在任意初始状态下,当耦合机构发生偏移时,使系统具有恒压输出特性的谐振频率f与耦合系数kM唯一对应,且随着耦合系数的增大,谐振频率增大。此外,随着Lpv增大或Lp的增大,系统谐振频率 减小。
减小。
2)输入阻抗角
合适的输入阻抗角设计可以使系统更好地运行在零电压软开关(Zero Voltage Switching, ZVS)状态,保证电路软开关的实现。为进一步分析系统初始参数对输入阻抗角的影响,定义图2中系统输入端阻抗为Zin,基于式(13)频率控制下的系统输入端阻抗为Zin-f(文中用下标f表示基于式(13)的频率控制下的系统参数),即有
式中,kV=Lpv/Lp,且有
 (15)
(15)
定义q为输入阻抗角,根据式(14)可计算基于频率控制下的系统输入阻抗角qf为
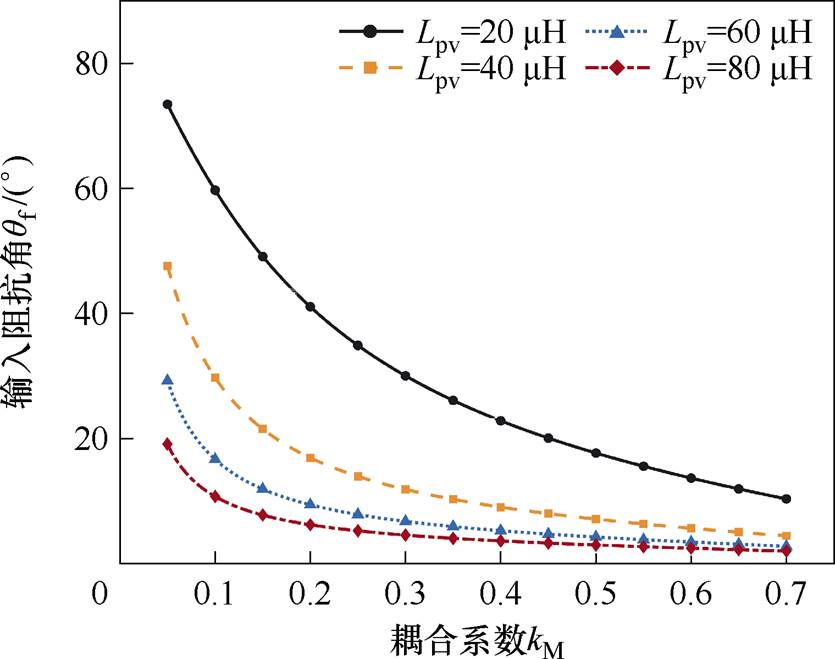
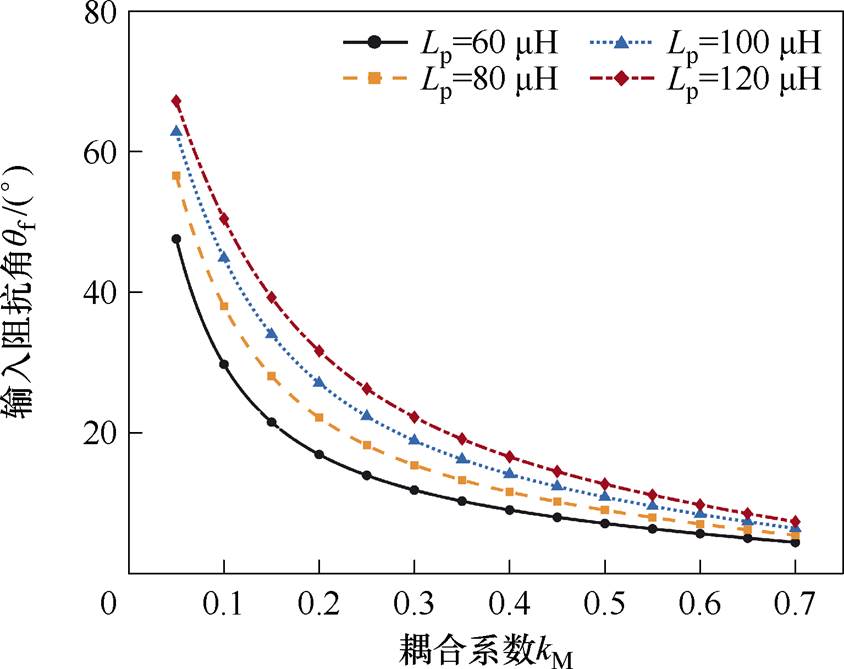
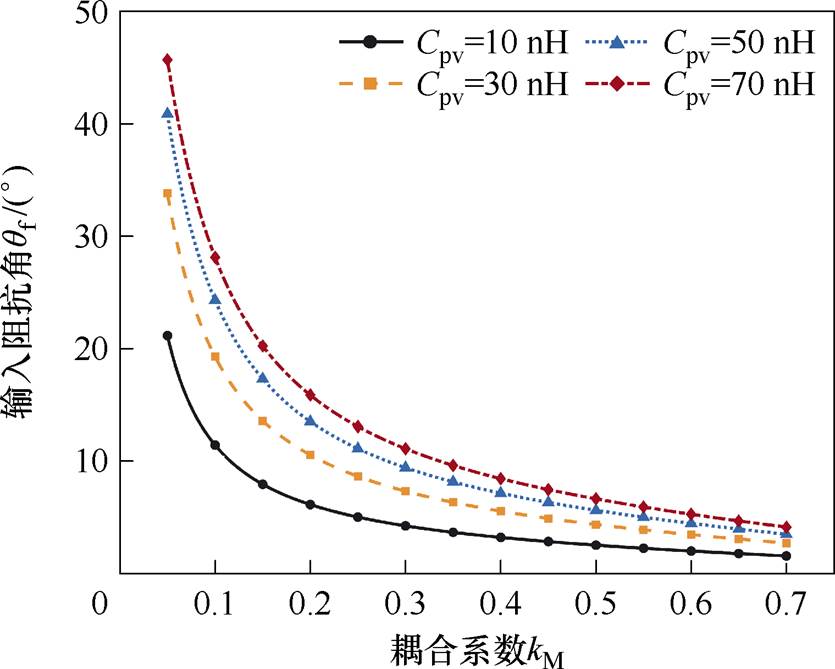
基于式(16),图8~图10分别给出了基于频率控制下的系统在耦合机构发生偏移时,输入阻抗角qf在不同Lpv、Lp、Cpv下随耦合系数变化的曲线。从图中可以看出,随着耦合系数kM的增大,电路输入阻抗角逐渐减小,同时随着Lpv增大或Lp减小亦或Cpv减小,电路输入阻抗角也逐渐减小。
特别地,在基于式(13)的频率控制特性下,系统在整个耦合系数变化区间内输入阻抗角始终大于0°。因此,可以通过初始参数的设计使系统始终运行在弱感性状态,此特性有利于系统在实际运行中更好地实现ZVS。
3)传输效率
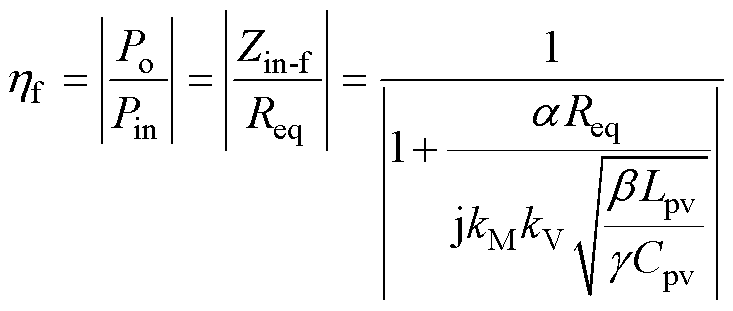
根据式(14)计算系统基于频率控制下的传输效率hf为
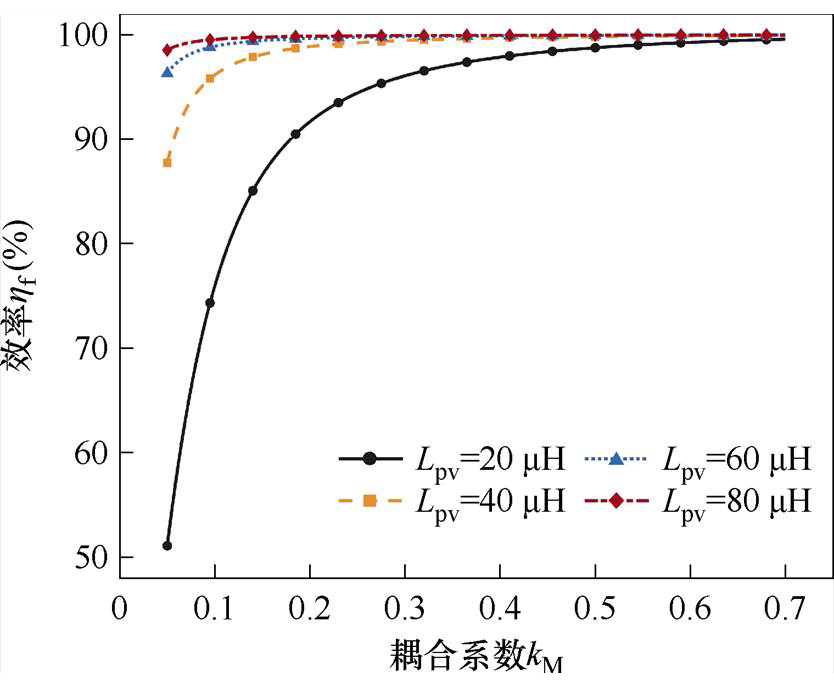
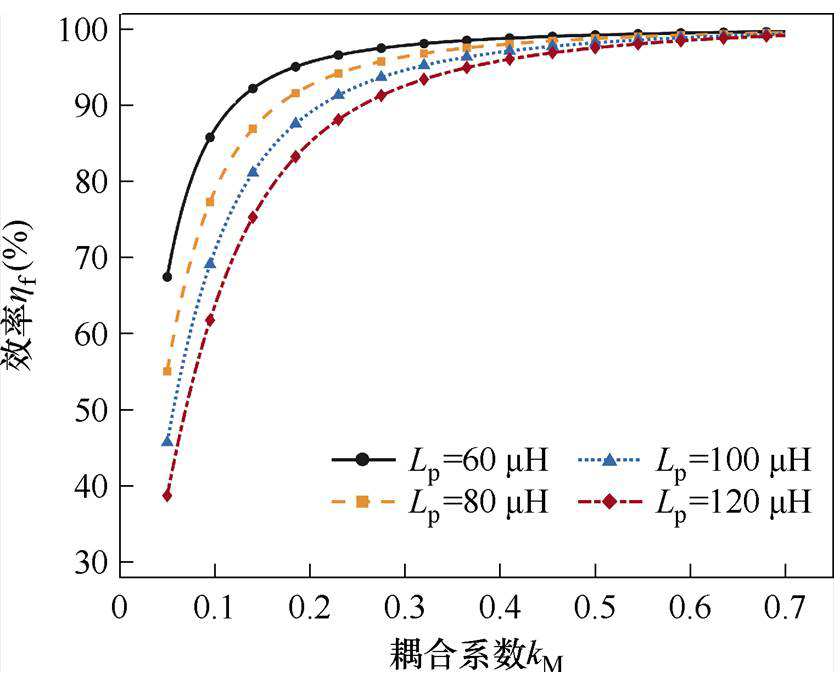
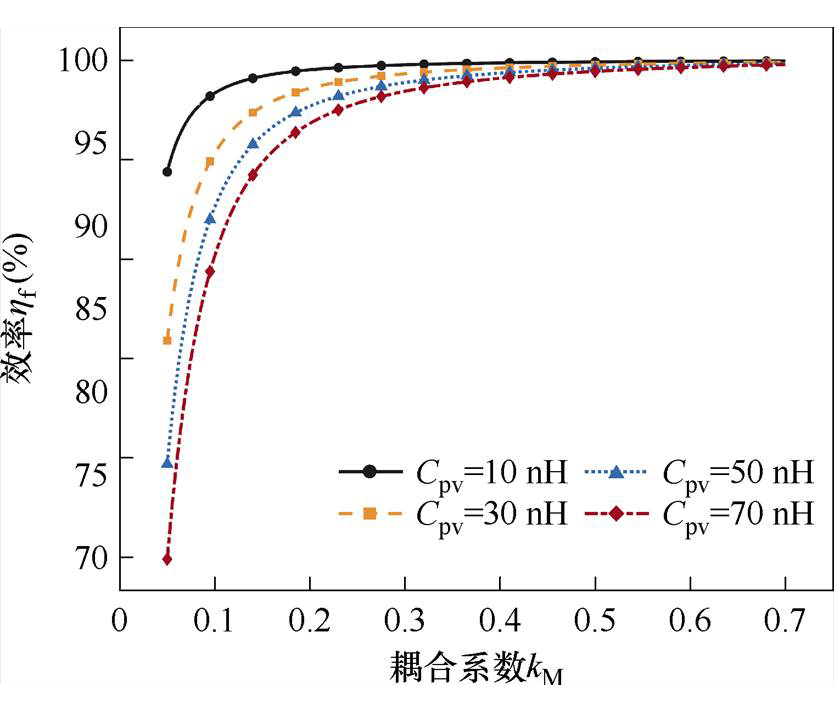
基于式(17),图11~图13分别给出了基于频率控制下的系统在耦合机构发生偏移时,传输效率在不同Lpv、Lp、Cpv下随耦合系数变化的曲线。随着耦合系数的增大,系统效率越高,同时随着Lpv的增大或Lp的减小亦或Cpv的减小,系统效率也逐渐增大。
综上所述,系统的初始参数Lpv、Lp、Cpv决定着系统在偏移情况下的频率控制范围、输入阻抗角范围及传输效率范围。而较大的Lpv值或较小的Lp、Cpv值有利于减小系统输入阻抗角,提升系统效率,同时较小的Lp和Cpv会导致系统具有恒压输出特性及抗偏移特性的谐振频率较高,进而致使线圈内阻较大,元器件应力增大,系统成本增加。因此需
要综合考虑系统初始参数的设计,从而提升系统的综合特性。
2.2 参数设计过程
在MC-WPT系统的实际应用中,系统的输出电压Uo、输出功率Po、传输效率h、装置体积、偏移范围等通常作为设计指标给定,即有h∈(hmin, hmax)。同时根据系统输出等级及装置体积、结构、质量等指标可初步确定耦合机构方案,并结合偏移范围指标,进一步确定耦合系数范围,即有kM∈(kM-min, kM-max)。因此本文参数的设计过程将输出电压Uo、传输效率h∈(hf-min, 1)、抗偏移范围kM∈(kM-min, kM-max)作为实现指标。考虑到系统的工作频率与输入阻抗角对MC-WPT系统的综合性能有着关键影响,在系统设计过程中,频率f的调节范围需要综合考虑系统传输效率、线圈内阻及过电流能力等,即有f∈(fmin, fmax)。输入阻抗角qf的变化范围需要综合考虑系统传输效率及开关器件的选型等,即有qf∈(qfmin,qfmax),因此本文参数的设计过程将f∈(fmin, fmax)和qf∈(qfmin,qfmax)作为约束条件。
结合上文的分析,当n=nL=1时,双边LCL-WPT系统具有恒压输出特性及抗偏移特性。此时系统发射端与拾取端谐振网络参数对应相等,因此后续主要分析发射端电路参数Lpv、Lp、Cpv设计过程。其中Lp的参数根据耦合机构方案优先确定。Lpv和Cpv的设计根据实现指标及约束条件确定。
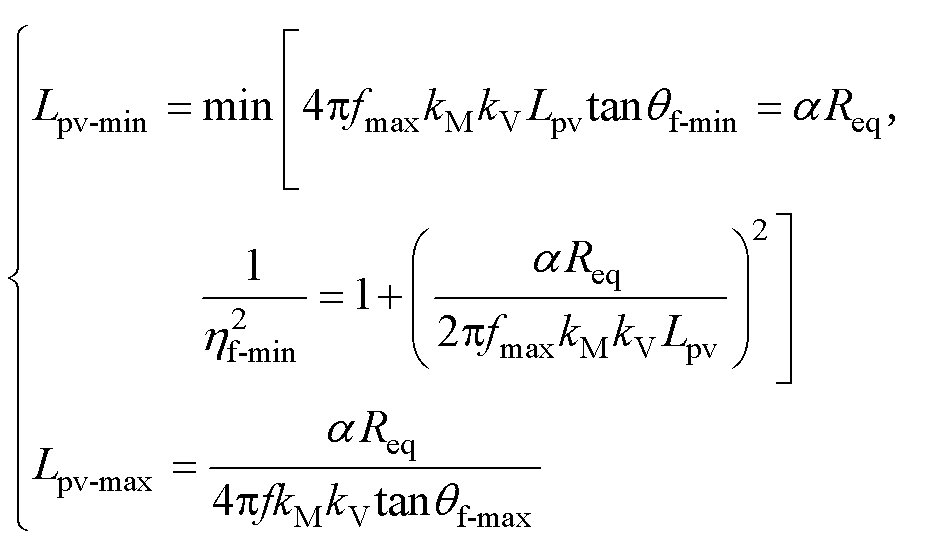
根据式(13)、式(16)、式(17),发射端谐振电感Lpv的参数设计区间为Lpv∈(Lpv-min, Lpv-max), 即有
根据式(13),进一步确定谐振电容Cpv的参数设计区间为Cpv∈(Cpv-min, Cpv-max),即有
 (19)
(19)
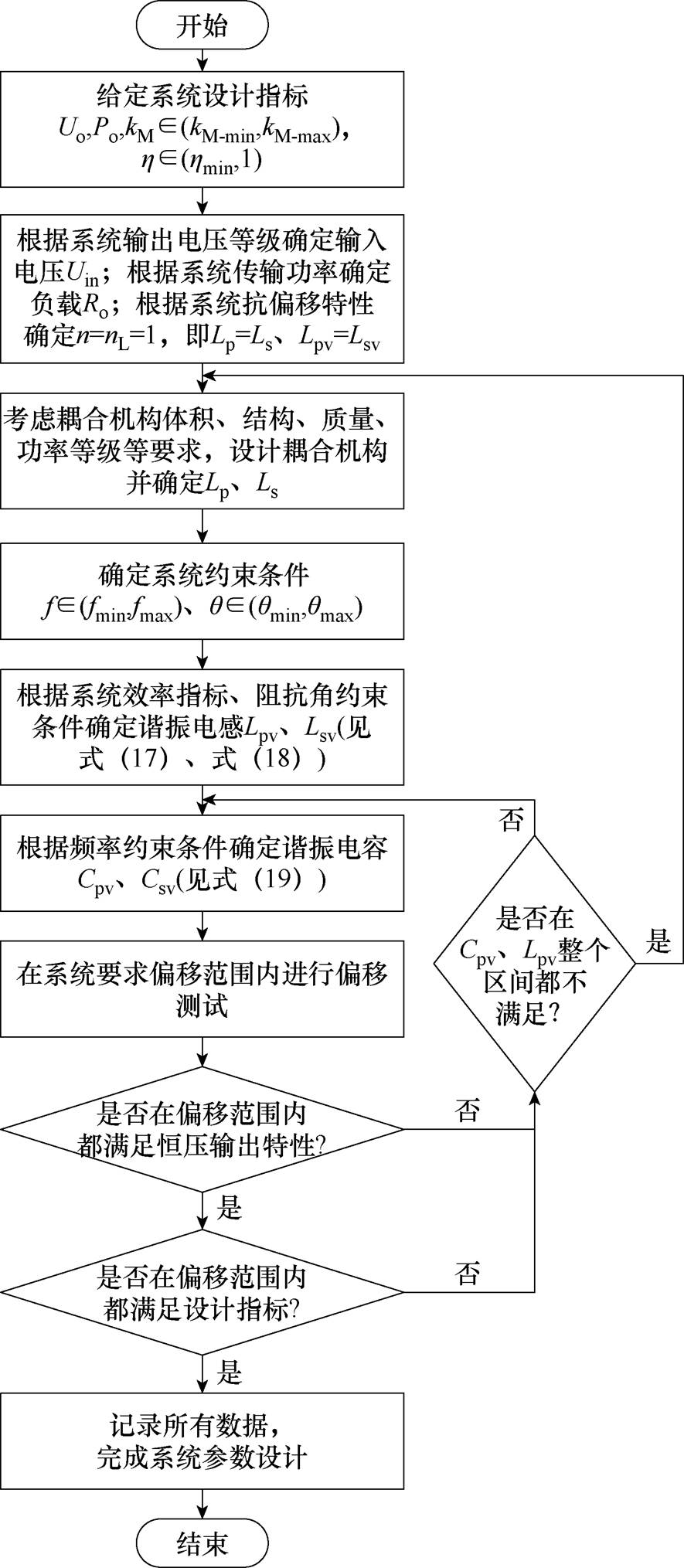
综上所述,图14给出了双边LCL-WPT系统初始参数设计流程,以实现系统在一定偏移范围内的恒压输出为目标,给定系统输出电压Uo、传输功率Po、传输效率q∈(qmin,qmax)、抗偏移范围kM∈(kM-min, kM-max)等设计指标。首先,根据系统的恒压输出特性及抗偏移特性,确定系统参数n=nL=1,即Lp=Ls、Lpv=Lsv;其次,综合考虑耦合机构体积、结构、质量和系统传输功率确定耦合机构模型及其自感Lp、Ls;最后,为提升系统综合性能,将频率f∈(fmin, fmax)、输入阻抗角作为约束条件,根据式(18)确定Lpv,再根据式(19)确定对应的Cpv。在此基础上对系统进行偏移测试,验证以上参数是否满足系统约束条件及指标要求;若不满足,则根据式(18)、式(19)重新调整Lpv、Cpv,若(Lpv-min, Lpv-max)和(Cpv-min, Cpv-max)整个区间内的参数都不满足,则重新调整Lp、Ls参数设计,直到得到满足设计要求的最优参数。
3 系统频率控制策略
第2节的研究表明,当耦合系数发生变化时,通过调节系统谐振频率使其满足式(13)的数学关系,即可实现系统在偏移下的恒压稳定输出。但是由于系统在偏移时的耦合系数无法直接测量,因此需要建立耦合系数与电路中其他易于测量的电路参数的数学模型,通过对其检测来对系统的工作频率进行控制,以实现系统偏移下的恒压输出。
由于本系统对工作频率的调整需要基于发射端逆变电路,同时为避免系统发射端与拾取端的通信,因此本文中系统的频率控制研究考虑基于系统发射端逆变输出的检测来实现。
根据二端口网络理论可计算图2电路中的输入阻抗为
根据式(20)可以得到逆变输出电流Iv及逆变输出电压电流相位差qv分别为
 (21)
(21)
式(21)建立了逆变输出量Iv和qv关于系统频率和耦合系数的数学模型,因此在耦合机构发生偏移时,可以通过检测Iv及qv获得偏移下的耦合系数,进而完成系统频率控制。
图15给出了双边LCL-WPT系统频率控制策略示意图。当系统发生偏移时,对发射端逆变输出电流幅值Iv及逆变输出电压电流相位差qv进行实时检测,并根据式(21)计算偏移下的耦合系数,进而根据式(13)计算此偏移下使系统维持恒压输出的频率。通过单片机对驱动信号进行处理,将调频后的驱动信号加载至逆变器,从而完成双边LCL-WPT系统偏移下的频率控制,实现系统在偏移下的恒压输出。
4 实验结果
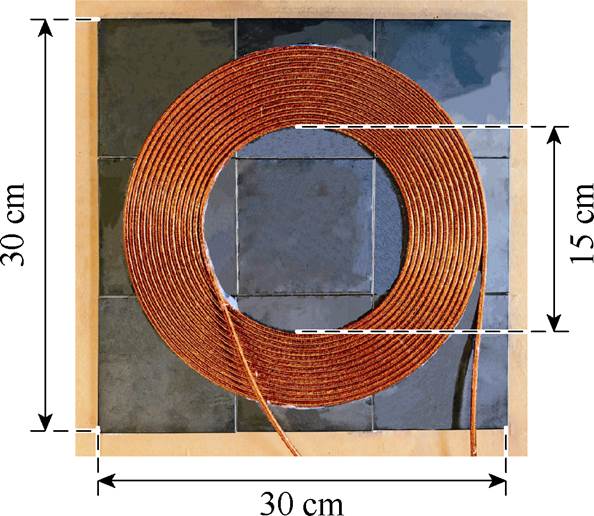
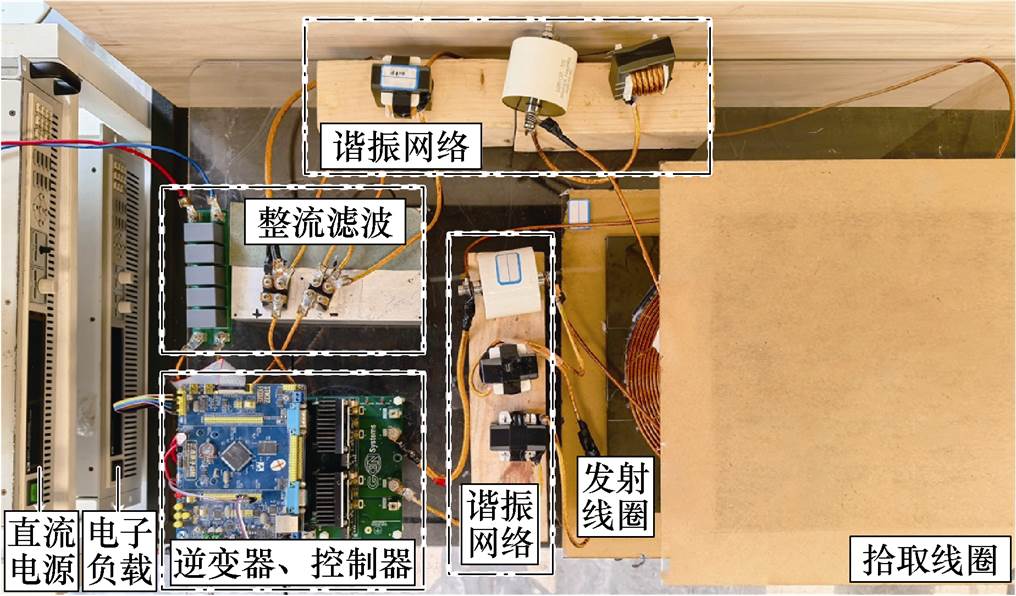
为验证本文提出的基于频率控制的系统抗偏移方法的正确性,绕制了如图16所示的耦合机构,搭建了如图17所示的双边LCL-WPT系统整机实验装置,主要由直流电源、逆变器、控制器、发射端谐振电路、耦合机构、拾取端谐振电路、整流电路和电子负载组成。其中发射端与拾取端的谐振电感由4 mm的利兹线沿“E”型磁心绕制而成,谐振电容由薄膜电容组合而成。发射端直流电源输入高频逆变器后,经过发射端LCL谐振网络在发射线圈上产生高频交变电压。基于电磁感应原理拾取线圈接收到感应电流,经过拾取端LCL谐振网络后输入整流滤波电路,并最终接入电子负载中。同时当系统发生偏移时,通过电流霍尔传感器对发射端电流进行采样,经过单片机处理后将新的驱动信号加载到MOSFET管上,完成系统频率控制。实验中耦合机构参数由LCR测试仪得到,系统输出由PW8001功率分析仪测量得到。
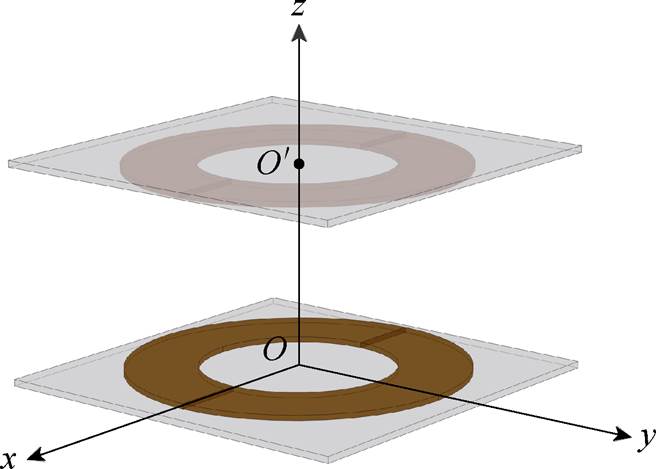
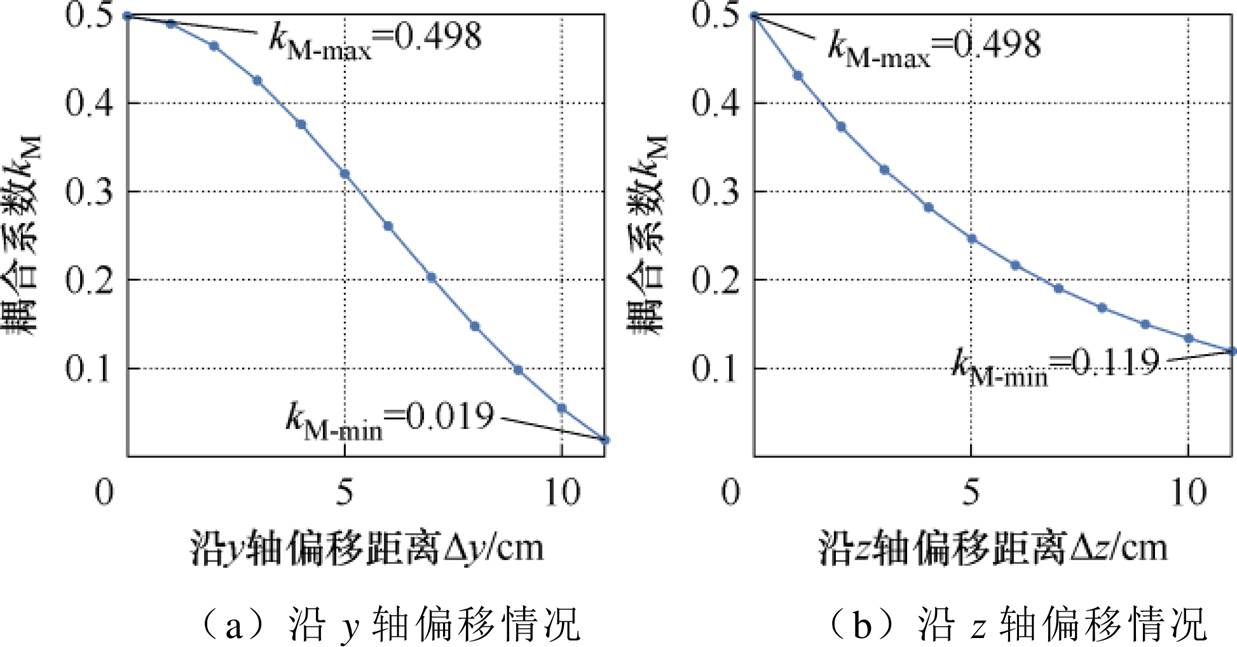
定义耦合机构发射端线圈的中心为坐标零点O,拾取线圈的中心为 ,垂直线圈平面的方向为z轴,平行于线圈平面分别为x轴、y轴,耦合机构方向示意图如图18所示,即有O(0, 0, 0)、(0, 0, z0)。当耦合机构传输距离z0=6.5 cm时,拾取线圈沿y轴方向的偏移可忽略自感的变化,因此后续实验设计传输距离为6.5 cm,在此基础上沿y、z轴进行偏移测试。
,垂直线圈平面的方向为z轴,平行于线圈平面分别为x轴、y轴,耦合机构方向示意图如图18所示,即有O(0, 0, 0)、(0, 0, z0)。当耦合机构传输距离z0=6.5 cm时,拾取线圈沿y轴方向的偏移可忽略自感的变化,因此后续实验设计传输距离为6.5 cm,在此基础上沿y、z轴进行偏移测试。
图19给出了拾取线圈沿y轴、z轴偏移时的耦合系数变化曲线,当拾取线圈中心位于(0, 0, 6.5 cm)时,系统耦合系数达到最大,此时kM=0.498。由于耦合线圈设计为圆形,x轴变化情况与y轴一致,因此后续实验只针对+y、+z轴偏移方向进行实验验证。实验拟设计实现输出电压60 V,传输效率大于80%的双边LCL-WPT系统,具体参数见表1。
表1 双边LCL-WPT系统实验参数
Tab.1 Experimental parameters of double-sided LCL-WPT system
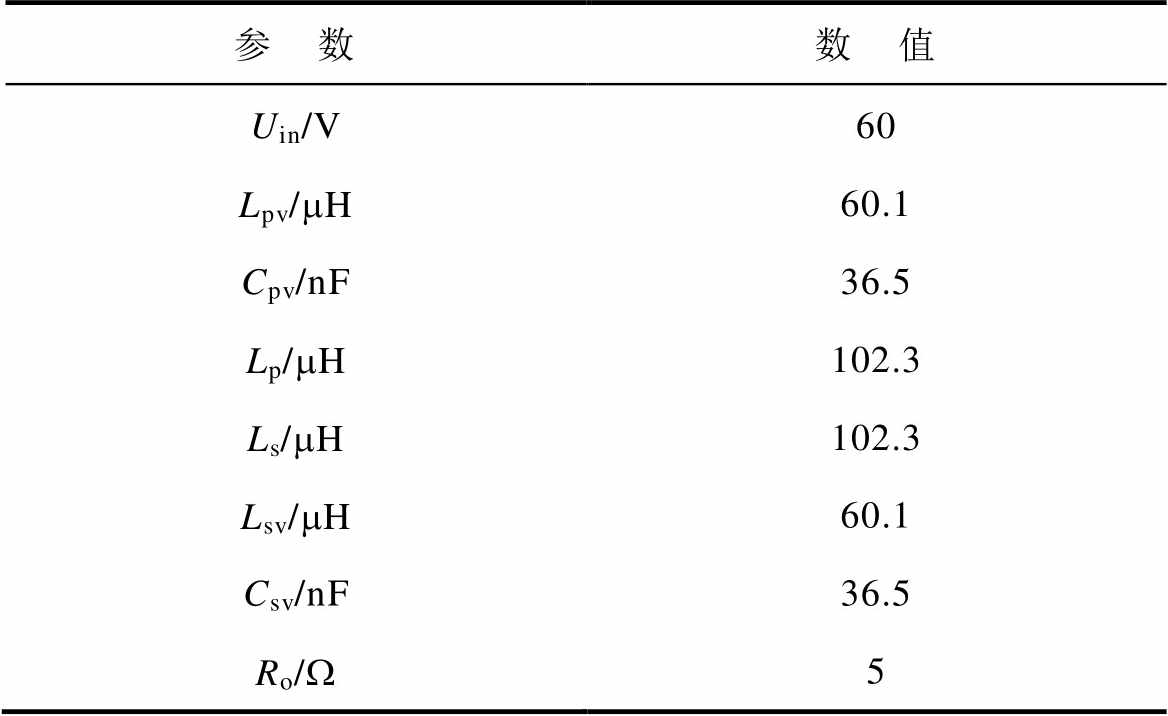
参 数数 值 Uin/V60 Lpv/mH60.1 Cpv/nF36.5 Lp/mH102.3 Ls/mH102.3 Lsv/mH60.1 Csv/nF36.5 Ro/W5
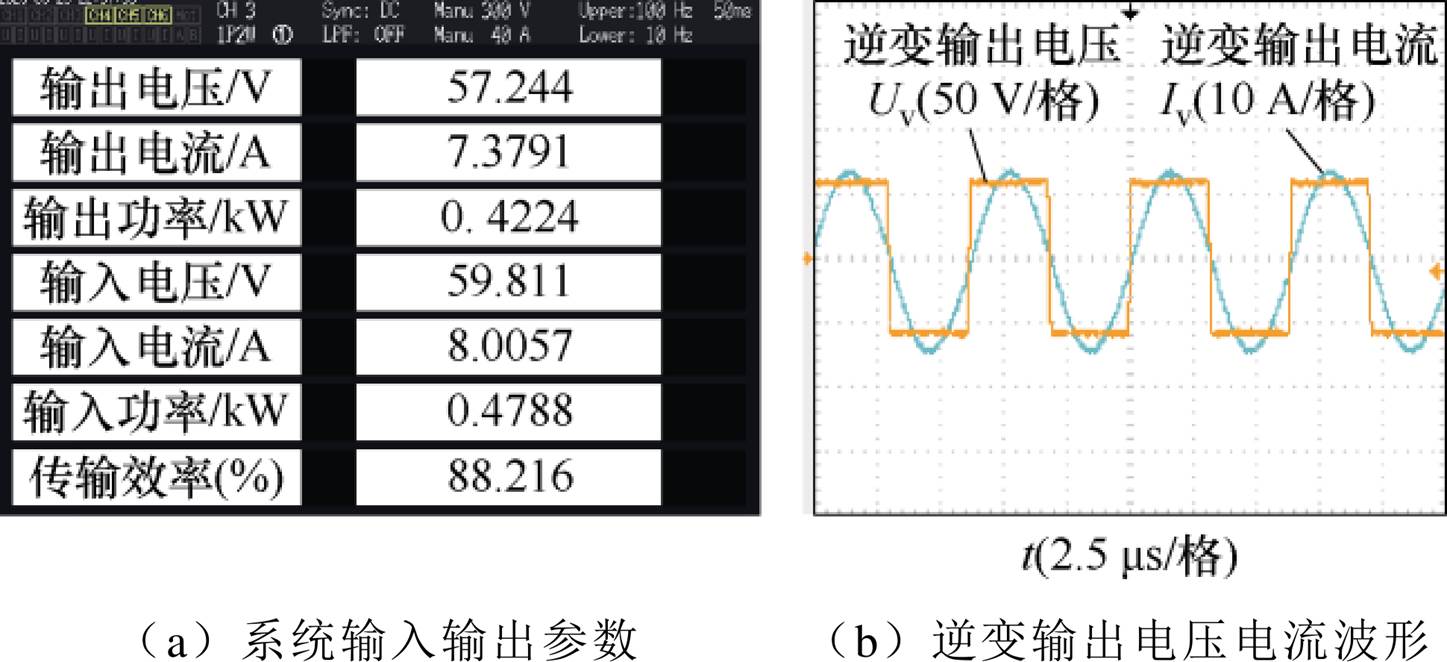
基于表1的系统参数,对双边LCL-WPT系统进行实验验证。图20中给出了系统在z=6.5 cm即耦合系数最大处时系统逆变输出电压电流波形及电路参数。此时系统输入电压60 V,输入电流8.005 7 A,输入功率478.8 W;输出电压57.244 V,输出电流7.379 1 A,输出功率422.4 W,系统传输效率为88.216%,对应的系统工作频率为157.6 kHz。
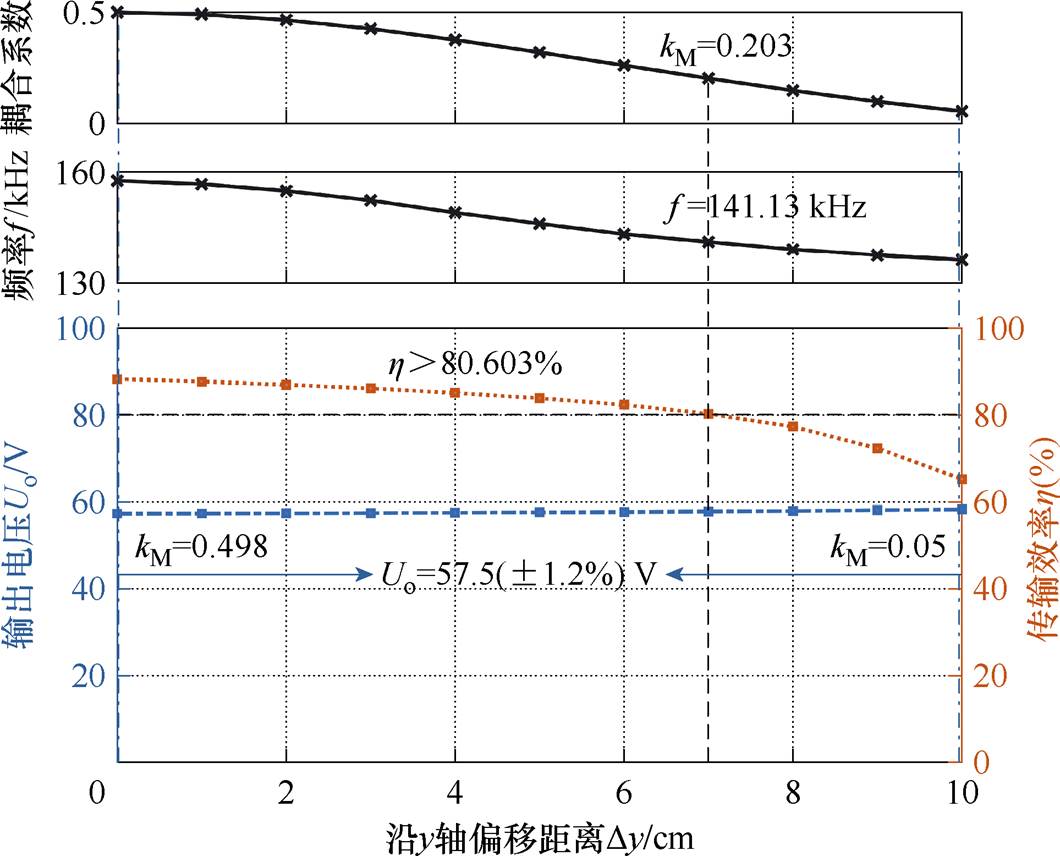
以拾取线圈中心位于x=0、y=0、z=6.5 cm时的系统电气状态作为初始参考状态,沿+y轴方向进行偏移,图21给出了在此偏移下系统输出电压及传输效率随偏移距离变化的曲线。从图21中可以看出,当沿y轴偏移在0~10 cm的范围内即耦合系数在0.05~0.498变化时,系统输出电压能够恒定保持在57.5 V,且电压波动小于1.2%。当沿y轴偏移在0~7 cm的范围内即耦合系数在0.203~0.498变化时,系统传输效率始终大于80.063%,且最大传输效率为88.216%。
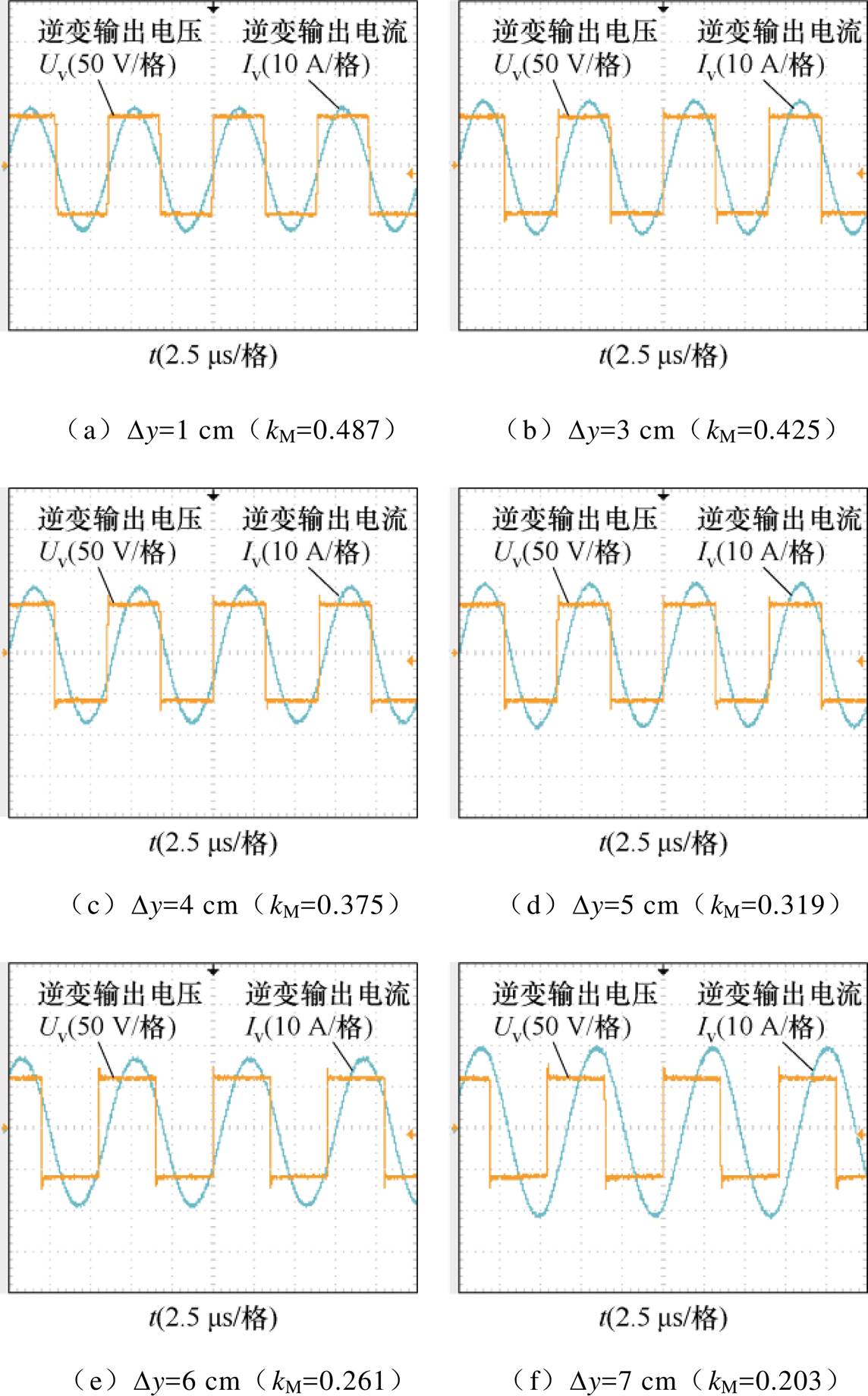
图22给出了拾取线圈沿y轴偏移时系统的逆变输出电压电流波形。结合图21可以看出,随着耦合系数的减小,基于式(13)的系统谐振频率逐渐减小,逆变输出电流逐渐增大,输入阻抗角逐渐增大,传输效率逐渐降低。
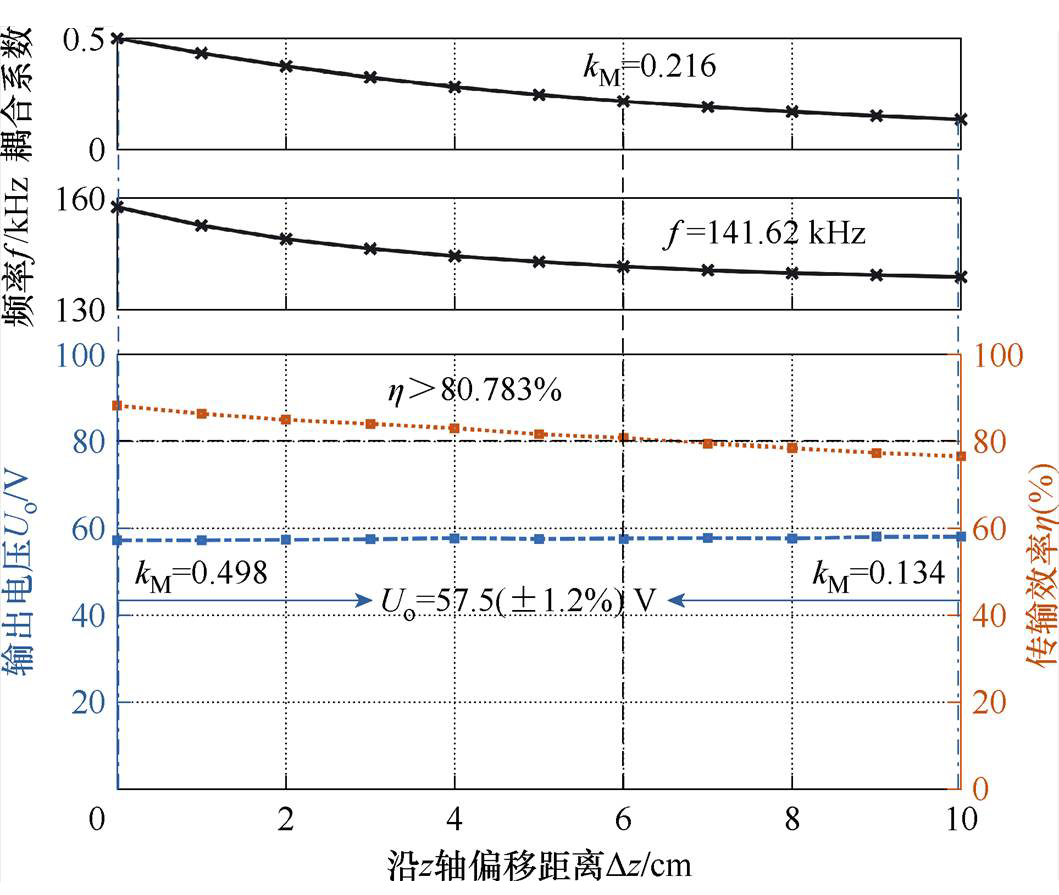
同样地,以拾取线圈中心位于x=0、y=0、z= 6.5 cm时的系统电气状态作为初始参考状态,拾取线圈沿+z轴方向进行偏移。图23给出了在此偏移下系统输出电压及传输效率随偏移距离变化的曲线。从图23中可以看出,当沿z轴偏移在0~10 cm的范围内即传输距离在6.5~16.5 cm,耦合系数在0.134~0.498变化时,系统输出电压能够恒定保持在57.5 V,且电压波动小于1.2%。当沿z轴偏移在
0~6 cm的范围内即传输距离在6.5~12.5 cm,耦合系数在0.216~0.498变化时,系统传输效率始终大于80.783%。
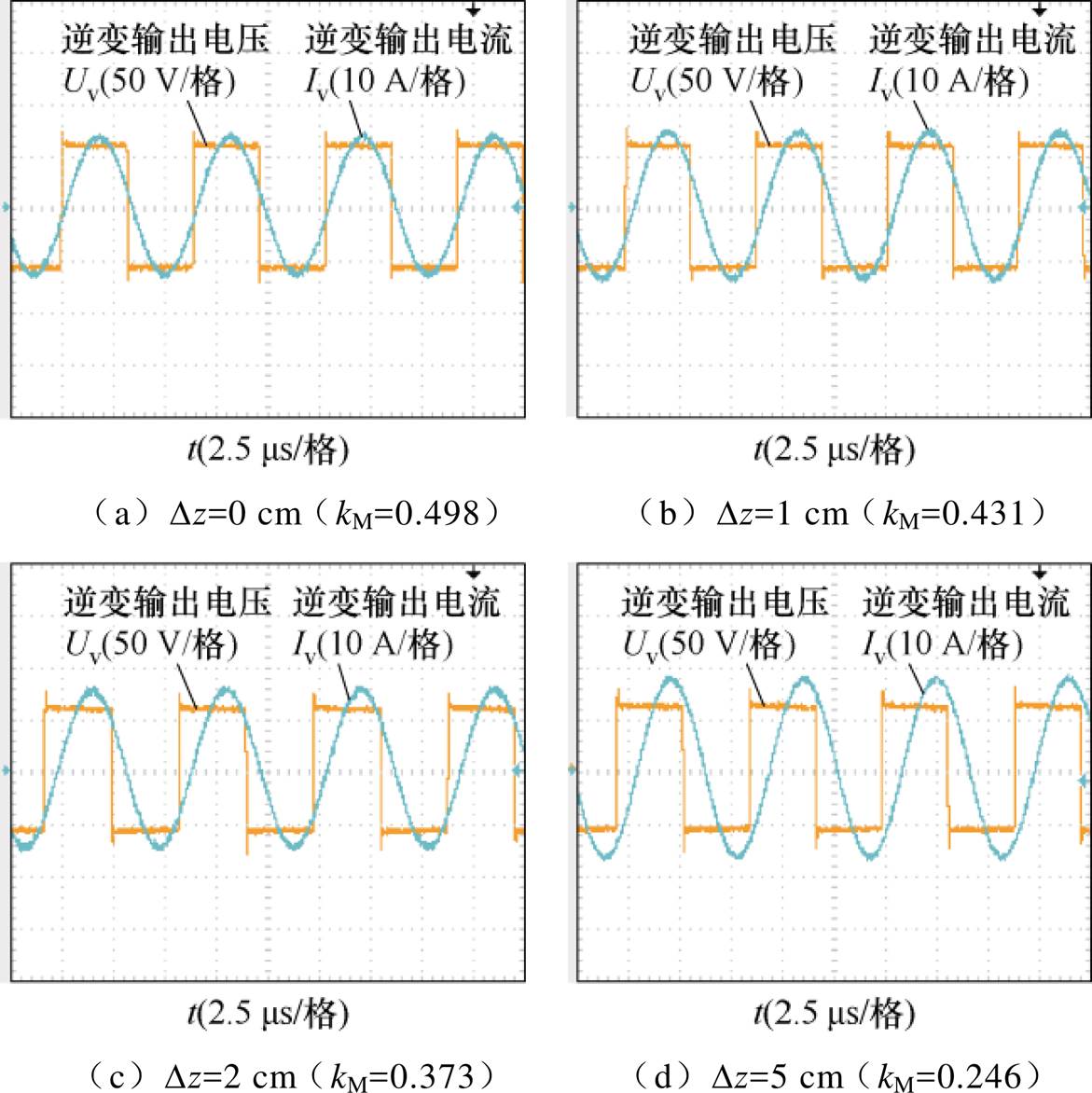
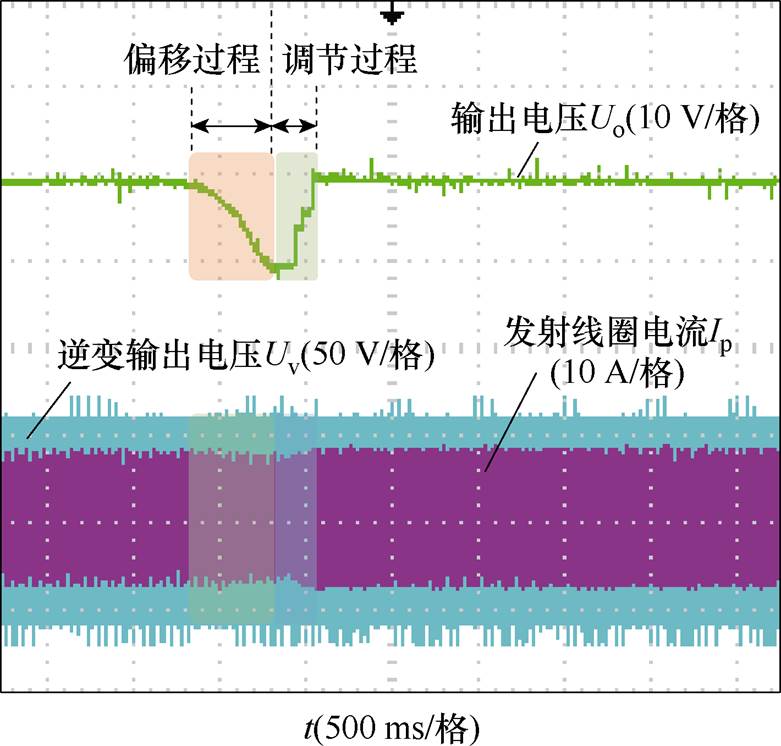
图24给出了拾取线圈沿z轴偏移时系统的逆变输出电压电流波形,其变化规律与y轴偏移一致。在拾取线圈由Dz=3 cm向Dz=2 cm偏移时,图25给出了系统输出电压及线圈电流在偏移时的动态变化过程。当线圈发生偏移时,输出电压减小,线圈电流出现小幅度振荡,随着系统工作频率的调节,线圈电流缓慢增大直到稳定,输出电压也缓慢增大直到稳态,最终实现偏移下的恒压输出。
综上所述,实验分析表明随着耦合系数的减小,使系统具有恒压输出特性的谐振频率逐渐减小,逆变输出电流逐渐增大,线圈电流逐渐减小,输入阻抗角逐渐增大,传输效率逐渐降低,与理论分析中系统在偏移下的变化规律一致。实验结果表明,所搭建的双边LCL-WPT系统可以在y轴偏移为0~7 cm即耦合系数为0.203~0.498的偏移范围内,z轴偏移为0~6 cm即耦合系数为0.216~0.498的偏移范围内实现系统的恒压输出,且输出电压波动小于1.2%,系统传输效率大于80.063%,且最大传输效率为88.216%。由此证明了本文所提出的基于频率控制的双边LCL-WPT系统抗偏移方法及系统频率控制策略具有可行性和正确性。
需要强调的是,本文所提出的抗偏移方法可以在现有的基于耦合机构设计的抗偏移方法的基础上,进一步提升系统的抗偏移能力。双边LCL-WPT系统实验参数见表2,对比表2中现有的抗偏移研究成果,本文所提出的基于频率控制的双边LCL- WPT系统抗偏移方法,展现了多方面的优势。
5 结论
为提升MC-WPT系统的抗偏移能力,本文提出了基于频率控制的双边LCL-WPT系统抗偏移方法,分析了基于频率控制的系统抗偏移原理,并给出了此原理下系统初始参数设计方法及系统频率控制方法。最后搭建了一套实验装置,实验结果表明,当耦合系数在0.203~0.498的偏移范围时,系统能够始终保持恒压稳定输出,且输出电压波动小于1.2%,系统传输效率始终大于80.063%,最大传输效率为88.216%,验证了本文所提方法的正确性和有效性。
表2 双边LCL-WPT系统实验参数
Tab.2 Experimental parameters of double-sided LCL-WPT system
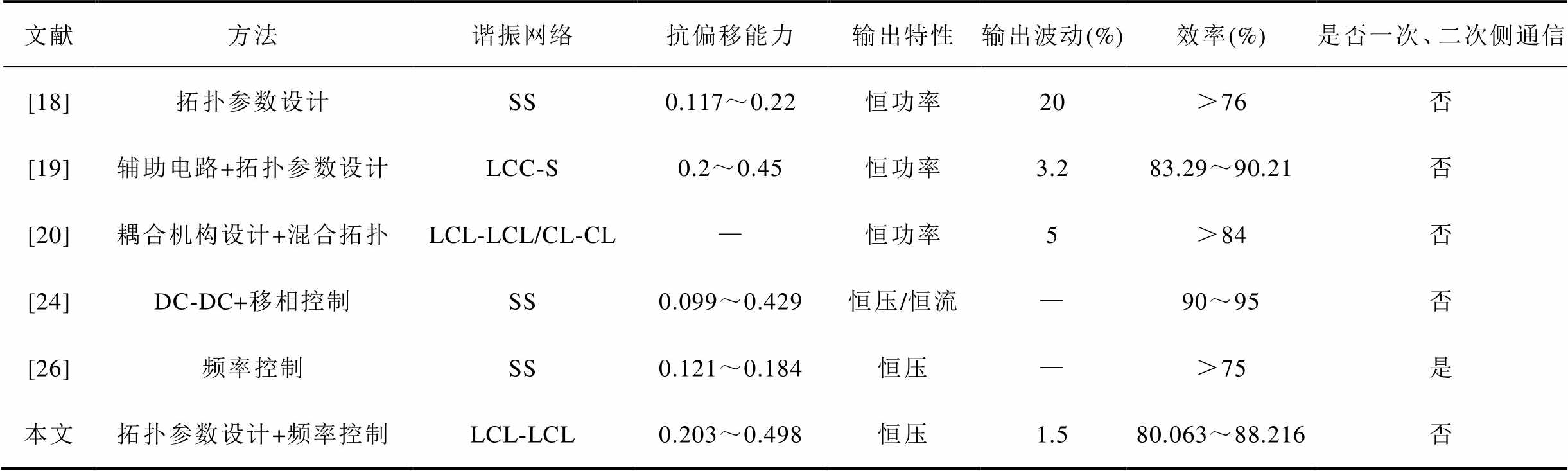
文献方法谐振网络抗偏移能力输出特性输出波动(%)效率(%)是否一次、二次侧通信 [18]拓扑参数设计SS0.117~0.22恒功率20>76否 [19]辅助电路+拓扑参数设计LCC-S0.2~0.45恒功率3.283.29~90.21否 [20]耦合机构设计+混合拓扑LCL-LCL/CL-CL—恒功率5>84否 [24]DC-DC+移相控制SS0.099~0.429恒压/恒流—90~95否 [26]频率控制SS0.121~0.184恒压—>75是 本文拓扑参数设计+频率控制LCL-LCL0.203~0.498恒压1.580.063~88.216否
参考文献
[1] 孙跃, 马皓, 赵雷. 无线电能传输技术及应用专辑主编述评[J]. 电源学报, 2023, 21(6): 1-6.
Sun Yue, Ma Hao, Zhao Lei. Editorial for the special issue on wireless power transfer technology and its applications[J]. Journal of Power Supply, 2023, 21(6): 1-6.
[2] 李争, 于治昊, 高世豪, 等. 基于有源整流的无线电能传输系统双边LCL零电压软开关控制策略[J]. 电工技术学报, 2025, 40(8): 2380-2392.
Li Zheng, Yu Zhihao, Gao Shihao. Two-sided LCL zero voltage switching control strategy based on active rectifier for wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2025, 40(8): 2380-2392.
[3] 冯天旭, 史可, 孙跃, 等. 基于互感识别及移相角优化的全方位无线电能传输系统靶向传能方法[J]. 电工技术学报, 2023, 38(24): 6581-6595.
Feng Tianxu, Shi Ke, Sun Yue, et al. Targeted power transfer method for omnidirectional wireless power transfer system based on mutual inductance identi- fication and phase-shift angle optimization[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(24): 6581-6595.
[4] 廖志娟, 孙跃, 叶兆虹, 等. 无线电能传输系统共振机理及共振点分布特性研究[J]. 电工技术学报, 2020, 35(2): 215-224.
Liao Zhijuan, Sun Yue, Ye Zhaohong, et al. Research on resonance mechanism and resonant point dis- tribution characteristic of magnetic coupling wireless power transfer systems[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 215-224.
[5] 吴丽君, 张朱浩伯, 曹鹏举, 等. 基于电压增益动态切换的无线充电控制方法[J]. 电力电子技术, 2021, 55(4): 87-91.
Wu Lijun, Zhang Zhuhaobo, Cao Pengju, et al. A control method of wireless power transfer charging based on voltage gain mode switching[J]. Power Electronics, 2021, 55(4): 87-91.
[6] 邓仁为, 苏玉刚, 胡宏晟, 等. 基于共面中继线圈的水下无线电能与信息并行传输系统[J]. 电工技术学报, 2025, 40(12): 3759-3769, 3786.
Deng Renwei, Su Yugang, Hu Hongsheng, et al. Research on underwater simultaneous wireless power and information transfer system with coplanar double- coil coupler[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3759-3769, 3786.
[7] Shi Ke, Feng Tianxu, Jiang Jincheng, et al. A highly magnetic integrated method of LCC-compensated IPT system with excellent misalignment tolerance[J]. IEEE Transactions on Power Electronics, 2023, 38(12): 16256-16268.
[8] Shi Ke, Tang Chunsen, Long Hao, et al. Power fluctuation suppression method for EV dynamic wireless charging system based on integrated magnetic coupler[J]. IEEE Transactions on Power Electronics, 2022, 37(1): 1118-1131.
[9] 张保坤, 邓钧君, 林倪, 等. 基于移相控制与模式切换的双向无线电能传输系统效率优化方法[J]. 电力系统自动化, 2025, 49(16): 187-196.
Zhang Baokun, Deng Junjun, Lin Ni, et al. Efficiency optimization method for bidirectional wireless power transfer system based on phase-shift control and mode switching[J]. Automation of Electric Power Systems, 2025, 49(16): 187-196..
[10] 李小飞, 蒋光利, 李志恒, 等. 基于互感与负载识别的AGV无线电能传输系统闭环恒流与效率优化控制方法[J]. 电工技术学报, 2025, 40(14): 4418- 4430.
Li Xiaofei, Jiang Guangli, Li Zhiheng, et al. A closed- loop constant current and efficiency optimization control method for AGV wireless power transfer system based on mutual inductance and load identi- fication[J]. Transactions of China Electrotechnical Society, 2025, 40(14): 4418-4430.
[11] 蒋金橙, 王佩月, 冯天旭, 等. 基于准双向三态协同调度的无人车和无人机逐级式无线充电应用[J]. 电工技术学报, 2024, 39(22): 6965-6979.
Jiang Jincheng, Wang Peiyue, Feng Tianxu, et al. AGV and UAV stepwise wireless charging appli- cation based on quasi bidirectional three-state collaborative progressive method[J]. Transactions of China Electrotechnical Society, 2024, 39(22): 6965- 6979.
[12] Hu Han, Hu Hongsheng, Chen Fengwei, et al. Efficiency improvement strategy based on frequency reduction with constant current characteristic for underwater wireless power transfer systems[J]. IEEE Transactions on Power Electronics, 2025, 40(9): 14038-14049.
[13] 王得安, 张剑韬, 朱春波, 等. 海洋环境对水下无线电能传输系统的影响机理研究进展[J]. 电工技术学报, 2025, 40(3): 653-675.
Wang Dean, Zhang Jiantao, Zhu Chunbo, et al. Review of progress in the study of marine environment effects on underwater wireless power transfer systems[J]. Transactions of China Electro- technical Society, 2025, 40(3): 653-675.
[14] 陈阳, 杨斌, 彭云尔, 等. 感应式无线电能传输系统抗偏移技术研究综述[J]. 中国电机工程学报, 2023, 43(14): 5537-5557.
Chen Yang, Yang Bin, Peng Yuner, et al. Review of anti-misalignment technology in inductive wireless power transfer system[J]. Proceedings of the CSEE, 2023, 43(14): 5537-5557.
[15] 王鹏程, 潘立刚, 王懿杰. 基于D.D.D.型松耦合变压器的无线电能传输系统研究[J]. 电气传动, 2023, 53(10): 29-35.
Wang Pengcheng, Pan Ligang, Wang Yijie. Research on wireless power transmission system based on D.D.D. loosely-coupled transformer[J]. Electric Drive, 2023, 53(10): 29-35.
[16] Hui S Y R, Ho W W C. A new generation of universal contactless battery charging platform for portable consumer electronic equipment[J]. IEEE Transactions on Power Electronics, 2005, 20(3): 620-627.
[17] Feng Tianxu, Sun Yue, Feng Yuchen, et al. A tripolar plane-type transmitter for three-dimensional omnidi- rectional wireless power transfer[J]. IEEE Transa- ctions on Industry Applications, 2022, 58(1): 1254- 1267.
[18] 胡宏晟, 蔡涛, 段善旭, 等. 用于WPT系统的一次侧失谐SS型补偿拓扑及其参数设计方法[J]. 电工技术学报, 2017, 32(18): 73-82.
Hu Hongsheng, Cai Tao, Duan Shanxu, et al. Study of the primary side detuned series-series compensated topology and parameter design for WPT system[J]. Transactions of China Electrotechnical Society, 2017, 32(18): 73-82.
[19] 张滨山, 张泽恒, 杨斌, 等. 基于钳位电路的LCC-S补偿型感应电能传输系统抗偏移方法[J]. 电工技术学报, 2024, 39(8): 2388-2399.
Zhang Binshan, Zhang Zeheng, Yang Bin, et al. LCC-S compensated inductive power transfer system against misalignment with a clamp circuit[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2388-2399.
[20] Zhao Lei, Thrimawithana D J, Madawala U K, et al. A misalignment-tolerant series-hybrid wireless EV charging system with integrated magnetics[J]. IEEE Transactions on Power Electronics, 2019, 34(2): 1276-1285.
[21] Lim Y, Tang H, Lim S, et al. An adaptive impedance- matching network based on a novel capacitor matrix for wireless power transfer[J]. IEEE Transactions on Power Electronics, 2014, 29(8): 4403-4413.
[22] 孙跃, 张静, 叶兆虹, 等. 基于阻抗匹配的IPT系统调谐电容特性[J]. 华南理工大学学报(自然科学版), 2016, 44(5): 42-47.
Sun Yue, Zhang Jing, Ye Zhaohong, et al. Characteristic of tuned capacitor in IPT system based on impedance matching[J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(5): 42-47.
[23] Xia Chenyang, Wang Wei, Ren Siyuan, et al. Robust control for inductively coupled power transfer systems with coil misalignment[J]. IEEE Transactions on Power Electronics, 2018, 33(9): 8110-8122.
[24] Wu Lihao, Zhang Bo, Jiang Yanwei. Position- independent constant current or constant voltage wireless electric vehicles charging system without dual-side communication and DC-DC converter[J]. IEEE Transactions on Industrial Electronics, 2022, 69(8): 7930-7939.
[25] Zhang Zhen, Shen Shen, Liang Zhenyan, et al. Dynamic-balancing robust current control for wireless drone-in-flight charging[J]. IEEE Transactions on Power Electronics, 2022, 37(3): 3626-3635.
[26] Gati E, Kampitsis G, Manias S. Variable frequency controller for inductive power transfer in dynamic conditions[J]. IEEE Transactions on Power Elec- tronics, 2017, 32(2): 1684-1696.
[27] Mohamed A A S, Berzoy A, de Almeida F G N, et al. Modeling and assessment analysis of various com- pensation topologies in bidirectional IWPT system for EV applications[J]. IEEE Transactions on Industry Applications, 2017, 53(5): 4973-4984.
An Anti-Misalignment Method for Double-Sided LCL-Compensated Wireless Power Transfer System with Frequency Regulation
Zuo Yue1 Sun Yue1,2 Chen Fengwei1,2 Hu Han1 Su Jingyuan3
(1. School of Automation Chongqing University Chongqing 400043 China2. National Center for International Research on Wireless Power Transfer Technology Chongqing 400043 China3. School of Electronic and Electrical Engineering Chongqing University of Science and Technology Chongqing 401331 China)
Abstract As magnetic coupling wireless power transfer (MC-WPT) technology continues to develop and is widely adopted, maintaining stable performance under coil misalignment has become increasingly important. A misalignment-tolerant method for the double-sided LCL-WPT system with frequency regulation was proposed to enhance system robustness against positional deviations and ensure stable and efficient power transfer.
Firstly, a comprehensive double-sided LCL-WPT system model was established, followed by an analysis of the effects of key parameters on voltage gain. Based on the system’s equivalent circuit model, the parameter relationships are derived. The output characteristics under misalignment conditions were explored, and the specific conditions for maintaining a constant-voltage output across varying misalignment scenarios were formulated. The analysis demonstrates that a stable output voltage can be maintained solely through frequency regulation, without requiring modification of the system’s initial parameters.
Then, the effects of key design parameters—coil self-inductance, resonant inductance, and resonant capacitance—on the controllable frequency range, input impedance phase angle, and transmission efficiency were analyzed. The analysis indicates that increasing Lpv or decreasing Lp and Cpv reduces the input impedance phase angle and enhances efficiency. However, the higher resonant frequency resulting from the smaller Lp and Cpv increases coil resistance, component stress, and system cost. To balance these competing design objectives, a systematic parameter design method was given, with output voltage, transmission efficiency, and misalignment tolerance as key performance metrics. Furthermore, to improve overall system performance, the operating frequency and input impedance phase angle range were considered as crucial design constraints, ensuring efficient operation under various conditions.
Since the coupling coefficient under misalignment cannot be directly measured, a mathematical model was developed. Then, the system operating frequency was adjusted in real time to maintain constant voltage output under varying misalignment conditions. A frequency control strategy based on transmitter-side measurements was proposed. This strategy enables constant-voltage output under misalignment solely through frequency regulation, ensuring system stability.
Finally, A 400 W prototype was developed. As the coupling coefficient decreases, the resonant frequency corresponding to the system’s constant-voltage output decreases, the inverter’s output current and the input impedance phase angle increase, and the coil current and transmission efficiency decline, consistent with theoretical predictions. Experimental results show that the double-sided LCL-WPT system maintains a constant-voltage output over misalignment ranges of 0 to 7 cm along the y-axis, corresponding to a coupling coefficient range of 0.203 to 0.498, and 0 to 6 cm along the z-axis, corresponding to a coupling coefficient range of 0.216 to 0.498. The system’s output voltage fluctuation is kept below 1.2%, with transmission efficiency exceeding 80.063% and peaking at 88.216%. The effectiveness of the anti-misalignment method for a double- sided LCL-WPT system is verified.
keywords:Anti-misalignment, constant voltage output, double-sided LCL-wireless power transfer (WPT), parameter design, frequency regulation
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.250930
国家自然科学基金资助项目(62073246)。
收稿日期 2025-06-03
改稿日期 2025-07-21
作者简介
左 月 女,1999年生,博士研究生,研究方向为无线电能传输技术。
E-mail: y_zuo@cqu.edu.cn
陈丰伟 男,1986年生,博士,副教授,研究方向为无线电能传输技术。
E-mail: fengwei.chen@cqu.edu.cn(通信作者)
(编辑 陈 诚)
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (7)
(7)
 (8)
(8)
 (10)
(10)
 (12)
(12)
 (14)
(14)
 (16)
(16)
 (17)
(17)
 (18)
(18)
 (20)
(20)