图1 无人机WPT系统磁耦合机构
Fig.1 Magnetic coupling mechanism for UAV WPT system
摘要 为解决无人机磁场谐振式无线电能传输系统中,因线圈位置偏移会导致能量传输效率下降的问题,该文设计了一种强抗偏移的新型无人机无线电能传输耦合机构。该耦合机构发射端由双正交DD线圈构成,分别向两个发射线圈输入相位差为90°的电角度的激励电流,可产生周期性旋转的磁场。接收端由两组对角放置并反向串联的螺线管组成,可以捕获旋转磁场的磁通,有效提升系统的抗偏移性。为匹配双发射双接收耦合机构,采用双通道LCC-S补偿拓扑,并对补偿元件参数进行分析计算,能实现发射端恒流输出和接收端串联恒压输出。实验结果表明,当水平偏移距离在±100 mm内、旋转偏移角度在±30°之间时,系统输出功率能够稳定在240 W以上,且效率不低于87%。
关键词:无线电能传输 无人机 旋转磁场 磁耦合机构 抗偏移
无人机凭借其卓越的灵活性和多功能性,在环境监测、物流配送和灾后搜寻等多个领域中扮演着至关重要的角色。随着无人机应用范围的不断扩大,对无人机远距离、大范围和长时间作业的需求也在不断增加。目前,无人机主要依赖锂电池供电,电池的容量限制了续航能力,而携带大容量电池会降低无人机载荷能力[1]。此外,由于能量密度和转换效率低,燃油驱动和太阳能充电等传统供电方式也难以提供令人满意的解决方案。
在此背景下,无线电能传输(Wireless Power Transfer, WPT)技术因其无需物理连接的特性,为无人机提供了一种创新的供电方式。该技术能够使无人机灵活补充能量,延长续航时间,同时降低了维护和操作的复杂性。然而,当无人机降落至无线充电平台时,由于外界环境因素如风力或降落精度不足,耦合机构可能会出现偏移问题。这种偏移会影响系统的耦合强度,从而导致充电不稳定。因此,开发一种具备强抗偏移能力的WPT系统对于提升无人机充电的稳定性至关重要。
目前,国内外针对WPT系统中的偏移问题,主要有三种解决方法:①开发专用的电源模块或采用闭环控制策略来保证功率输出的鲁棒性[2-5],但可能会进一步增加系统电路的复杂性和成本;②对系统补偿拓扑进行结构优化,以实现恒压/恒流输出并减小线圈偏移导致的影响[6-8],但增加的补偿元件会引入额外的功率损耗,从而降低系统的整体效率;③研发高偏移容忍度的新型磁耦合机构[9-13],以减小位置变化对耦合机构之间互感的影响。相比前述两种方法,通过采用新型抗偏移磁耦合机构,能从根本上减少偏移对耦合机构互感的影响,从而提升系统的抗偏移能力。
国外对无人机WPT系统耦合机构抗偏移技术也进行了广泛的研究。伦敦帝国理工学院研究团队通过增加发射线圈的外径,增强了无人机在充电平台上定位的灵活性[14]。该系统能实现80%的充电效率和150 W的功率输出。马来西亚国民大学研究团队采用发射线圈密绕结构,提升了空间磁场的密度及范围。在1 cm气隙偏移条件下,该系统能够实现17.1 W的最大输出功率和71%的效率[15]。然而,随着线圈尺寸的扩大或密绕程度的增加,这些设计可能会加剧漏磁现象。因此,在结构优化时需要仔细权衡,以避免对无人机系统造成电磁干扰。意大利拉奎拉大学的科研团队通过优化排列和组合多个发射线圈[16],扩大充电区域的面积,能够在±500 mm的偏移范围内,确保无人机的传输效率不低于85%。该多线圈设计方案在减少漏磁问题方面取得了一定进展,但同侧线圈间存在的交叉耦合问题仍需要进一步改善,以确保系统的最优性能。
国内在无人机WPT耦合机构技术方面也在不断推进,取得了显著成就。华中科技大学研究团队通过不等间距的方形平面螺旋发射线圈,结合遗传算法优化线圈间距,实现了磁场分布的均匀性[17]。该设计虽然提高了系统的磁场耦合效率,但也对发射线圈的结构位置提出了更高的要求,增加了实际无人机WPT应用中的复杂度。哈尔滨工业大学(威海)研究团队开发了一种基于新型正交磁耦合结构的无人机WPT系统[18]。该系统采用平面U型核心的极化发射器与垂直空心接收线圈相结合,能以90.8%的效率进行500 W功率的恒流恒压充电。同时,该系统在减少电磁干扰和交叉互感方面取得了显著成效。天津大学研究团队提出了一种发射端“工”型磁心、接收端“Ⅰ”型磁心的“Ⅰ工Ⅰ”型磁耦合机构[19]。该设计显著提高了系统在位置偏移时的稳定性,并降低了杂散磁场,实现了最高89.5%的充电效率和1 W/g的功率密度。
综合而言,现有的耦合机构设计方案往往未能充分考虑对减少磁场泄漏、同侧线圈解耦以及提升多方位抗偏移能力的需求,从而影响了无人机无线充电系统在实际环境中的性能。
本文提出了一种基于双发射双接收的新型无人机磁耦合机构,通过引入旋转空间磁场显著提升了系统的抗偏移性能。该设计通过线圈解耦结构有效地解决了同侧线圈间的交叉耦合问题,同时显著降低了磁通泄漏。本文还深入分析了旋转磁场的激发机制,优化了耦合结构参数,并设计了适配双能量通道的补偿拓扑。最终,构建系统样机进行了性能测试,验证了设计的有效性。
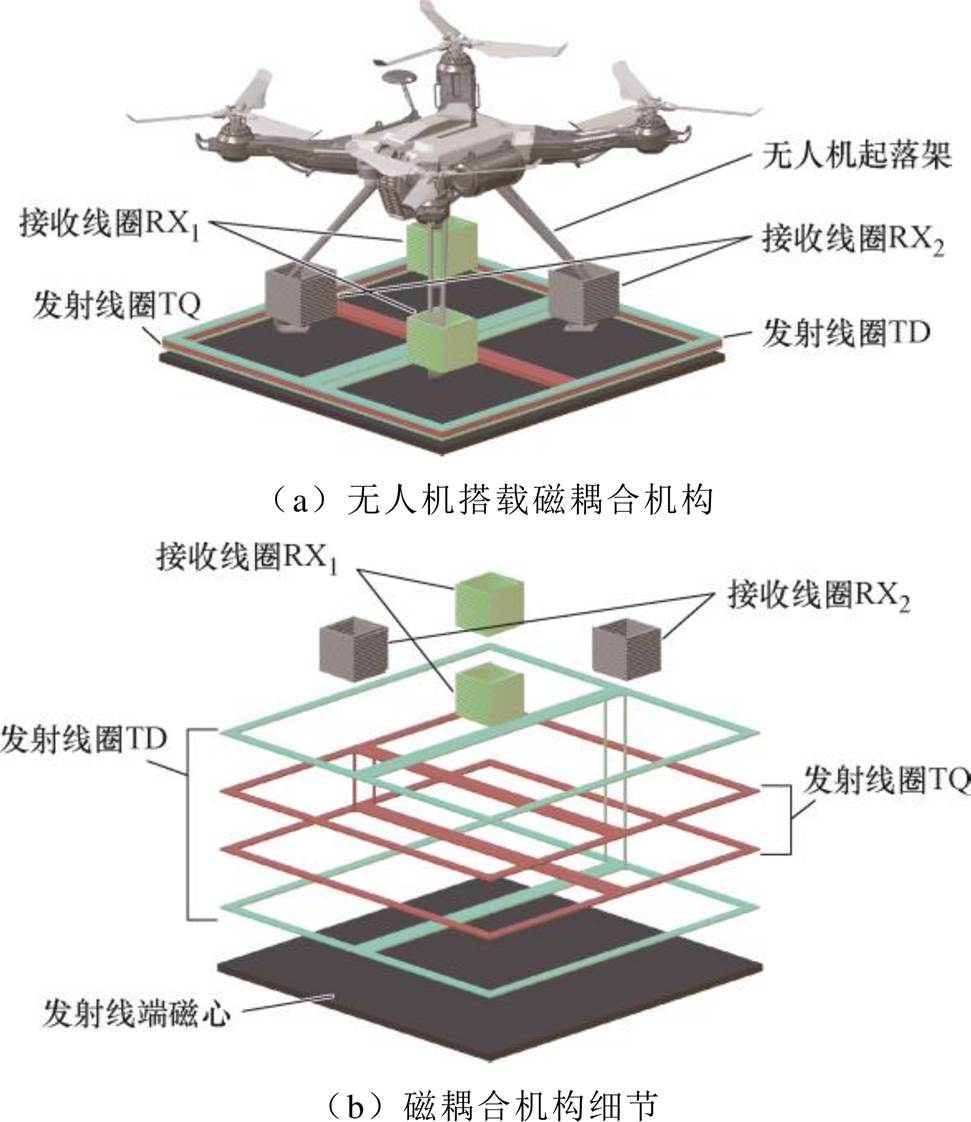
在无人机的WPT系统中,磁耦合机构起着关键作用,直接影响能量传输的效率和模式。其设计需要综合考虑几何形状、安装位置与磁场分布的相互作用,以确保其适应无人机的独特结构并具备优良的抗偏移性能。图1展示了本文提出的无人机搭载双正交DD-双组合式螺线管磁耦合机构的示意图,以及详细展示了该耦合结构的细节。整个耦合机构包括位于发射线圈下方的矩形磁心,双正交DD发射线圈TD和TQ,以及缠绕在无人机四个支脚上的双组合式螺线管接收线圈RX1和RX2。该结构设计能够实现同侧线圈解耦,有效减少漏磁。在此基础上,分别向两个发射线圈输入相位差为90°电角度的激励电流,可以产生周期性旋转的动态磁场。接收端的双组合式螺线管线圈能够有效地捕获旋转磁场的磁通,从而保持充电效率,提升系统的抗偏移性。
图1 无人机WPT系统磁耦合机构
Fig.1 Magnetic coupling mechanism for UAV WPT system
磁耦合机构中,磁场的形状与分布由发射端线圈的结构直接决定。为实现均匀高效的动态旋转磁场,本文设计了一种双正交DD线圈结构,其具体形式如图2a所示。该发射端由两组DD线圈TD和TQ构成,每组线圈采用双层绕制,并在空间上正交叠置形成四层结构。第一组线圈TD位于最外侧的上下两层,第二组线圈TQ位于中间两层,两者的正交排列设计为动态旋转磁场的形成奠定了基础。与传统的单极发射线圈相比,这种双极发射线圈磁通能够围绕中心形成闭环,显著减少了漏磁现象。图2a中,LT为发射线圈外径,NT为发射线圈匝数,WC为磁心厚度。
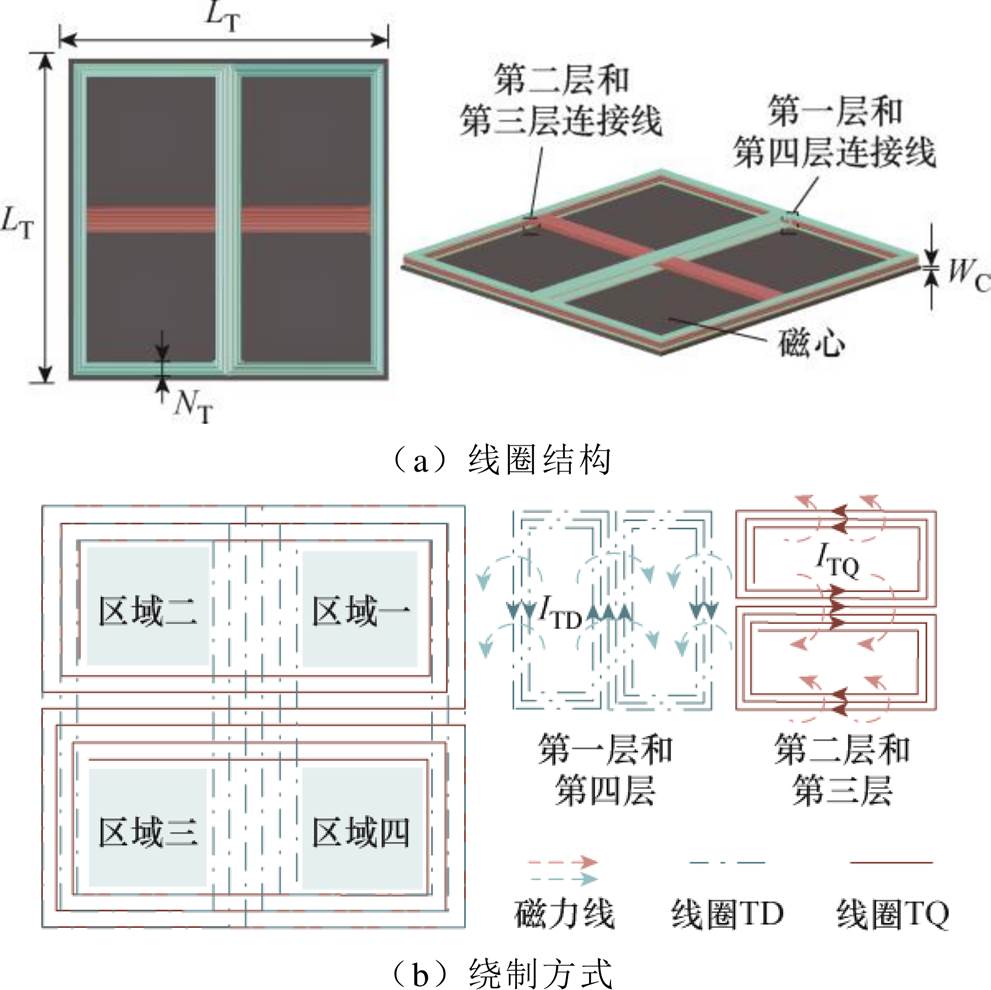
图2 发射端双正交DD线圈
Fig.2 Transmitter double orthogonal DD coils
图2b展示了双正交DD线圈的绕制方式,其中ITD和ITQ是输入两个发射线圈的激励电流。由于TD和TQ线圈在空间上正交叠放,并且每组DD线圈内部相邻的两个D型线圈采用反向绕制。当其中一个D型线圈产生竖直向上的磁通时,相邻线圈则产生等量竖直向下的磁通。由于这种反对称设计,TD和TQ线圈之间的互耦磁通量几乎为零,即MTDTQ= 0,从而实现发射侧线圈间的解耦。
为了进一步优化磁场分布,在双正交DD线圈下方设置了矩形磁心。磁心的引入可以集中和增强磁场分布,减少漏磁现象,使闭环磁通更加紧密。同时,输入TD和TQ线圈的激励电流ITD和ITQ之间具有90°的电角度相位差,这种激励电流的正交输入是形成旋转磁场的关键。两个发射线圈通过错峰激发磁场,实现相互叠加,从而进一步提升磁场的均匀性和稳定性。
图3展示了旋转磁场的各个部分磁通在理论上的变化过程,其中qs为空间参考角,T为系统工作频率对应的一个周期,t为当前采样时刻。在发射线圈的XOY平面内,将X轴的正方向定义为空间角度的基准参考方向。将发射线圈的四个矩形区域定义为工作区域。磁场由发射线圈的任一工作区域垂直发出,在线圈中心O上方形成水平磁通,随后在对角工作区域以相反方向垂直进入,构成一个闭合的磁通回路。通过分析线圈中心上方的水平磁通的变化趋势,可以进一步揭示整个磁场的动态演化过程。由于TD和TQ线圈呈正交排列,两者在线圈中心上方产生的水平磁动势方向相差90°。这种角度差不仅决定了两个线圈间磁场的叠加特性,还影响了水平方向叠加的合磁通分量的方向和强度,从而对整体磁场的分布特性产生关键作用。
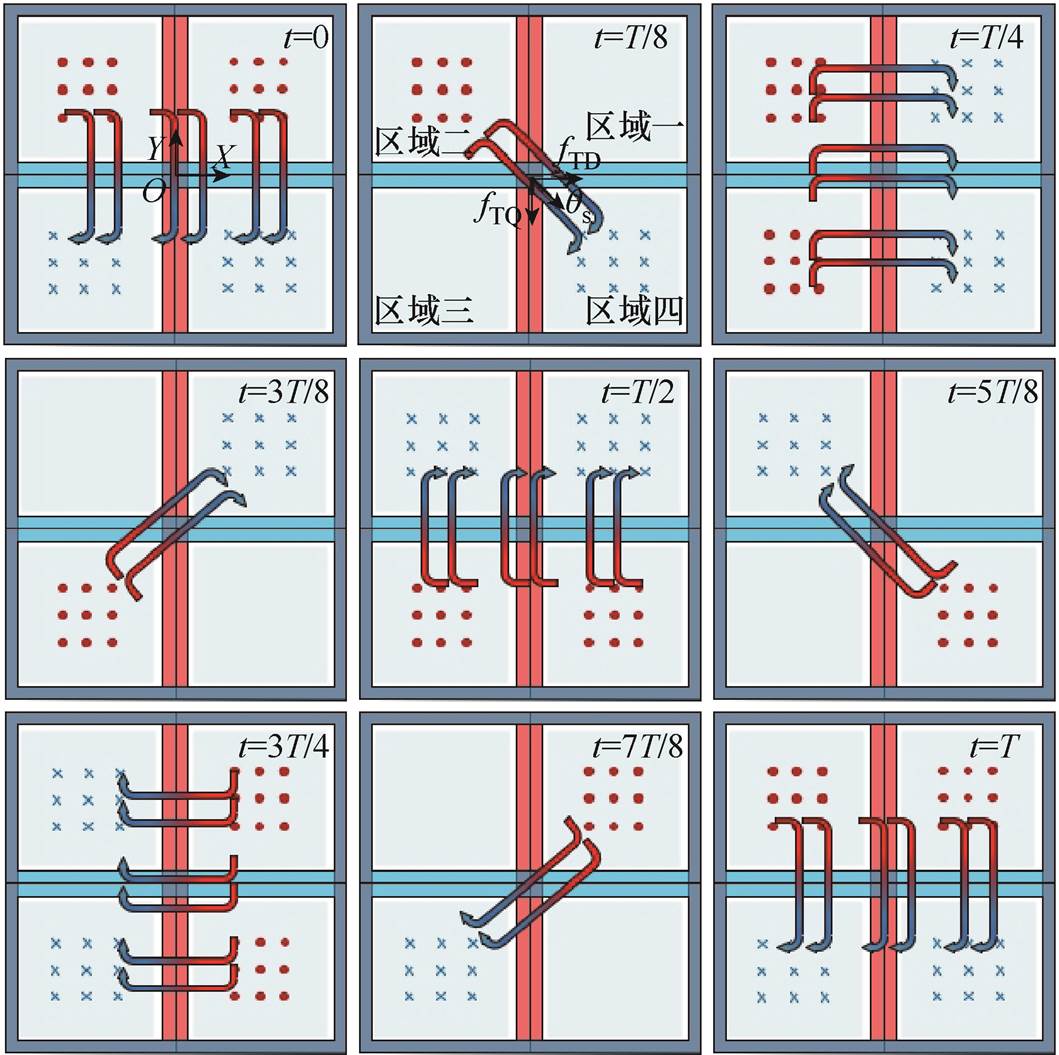
图3 旋转磁场的理论分析
Fig.3 Theoretical analysis of rotating magnetic field
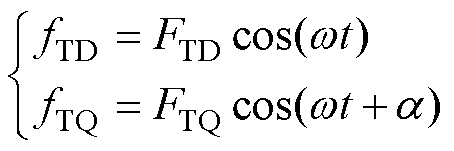
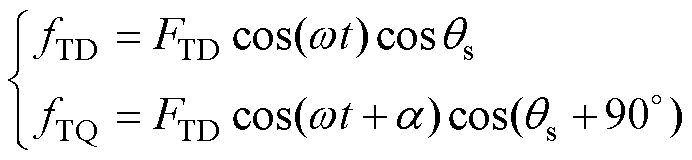
通过正交激励电流的输入,结合TD和TQ两组DD线圈的正交位置关系,在线圈中心激发的水平磁动势fTD和fTQ随时间的变化特性表达为
 (1)
(1)
式中,FTD和FTQ为线圈TD和TQ磁动势幅值;w为系统角频率;a为线圈TD和TQ通入激励电流之间的相位差。
假设这两个线圈的结构参数相同,则可视为FTD=FTQ。且在XOY平面上fTQ的方向相对fTD存在90°的夹角,cosqs用来表示该水平磁动势当前的方向。则添加的随方向变化的水平磁动势fTD和fTQ可表示为
 (2)
(2)
进一步地,发射端上方空间内任一点的水平合成磁动势fF都由磁动势fTD、fTQ叠加而成,可表示为
 (3)
(3)
当a=90°时,合成磁动势fF 可化简为
 (4)
(4)
式(4)表明,当a=90°时,结合时间参数和方向参数,如果持续追踪水平合成磁动势的最大值,其方向将随着时间推移发生周期性变化,并在空间呈现等幅的旋转运动。通过这种动态特性可以认识到整个闭环磁通都同步地随磁水平磁动势的旋转而发生相应变化。
接下来,将进一步分析旋转磁场作用下四个工作区域内垂直磁通的变化规律。旋转磁场仿真结果如图4所示。在t=T/8时,可以观察到区域二的磁通方向垂直向上,而区域四的磁通方向垂直向下,两者的磁场强度均达到峰值,形成两个矩形平面内的均匀磁场。这两个区域的磁通方向相反,磁通量相等,并且环绕发射端中心形成闭环。同时,区域一和区域三的磁场强度为零。然后,随着时间的推移,磁场将在四个区域内进行周期性旋转,例如经过1/4周期后,即t=3T/8时,区域三的垂直磁通方向变为向上,而区域一的垂直磁通方向变为向下,而区域二和区域四的磁场强度降为零。这一周期性变化连续循环进行,使得四个区域交替产生不同方向的竖直磁通,从而形成了一个动态的竖直旋转 磁场。
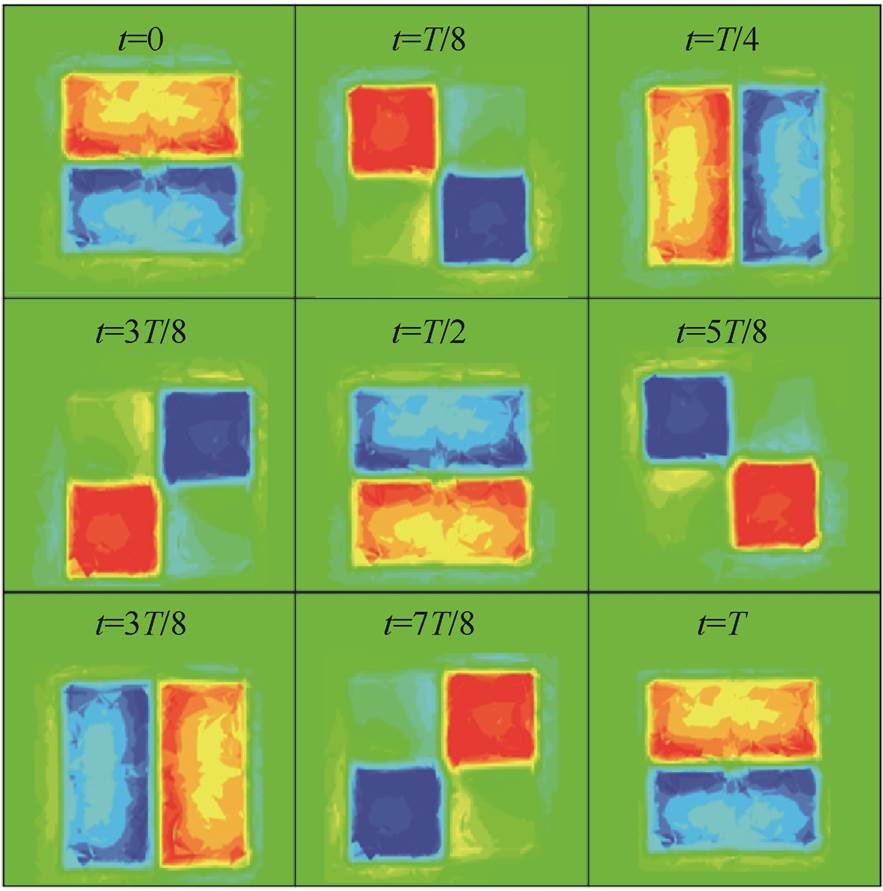
图4 旋转磁场仿真结果
Fig.4 Simulation results of rotating magnetic field
通过采用双正交DD线圈结构与正交激励电流的设计,发射端能够形成动态旋转的闭环磁场。这种设计不仅显著减少了漏磁现象,满足发射端线圈解耦,还保证了磁场的均匀性和稳定性。同时,动态旋转磁场的特性使得发射端磁场能够适应多种空间偏移条件,满足复杂环境下高效能量传输的需求。矩形磁心的引入进一步优化了磁场分布,确保了系统的高性能运行,为整体WPT系统提供了坚实的磁场基础。
考虑到无人机的独特结构,接收线圈的位置和形状对WPT的性能至关重要。传统设计通常将接收线圈放置在机身或腹部,但这些位置可能会对无人机产生电磁干扰。为减少干扰,本文将接收线圈设置在无人机四个起落支脚上,远离机身,确保系统的稳定性。
接收端采用了双组合式螺线管线圈的设计,结构如图5所示。每组线圈由两个内嵌双层矩形螺线管组成,对角的两个螺线管通过反向串联连接,电流方向相反,能够接收相反方向的磁通。该设计确保接收端能够捕获旋转磁场中的磁通,并在旋转过程中实现磁通均衡。
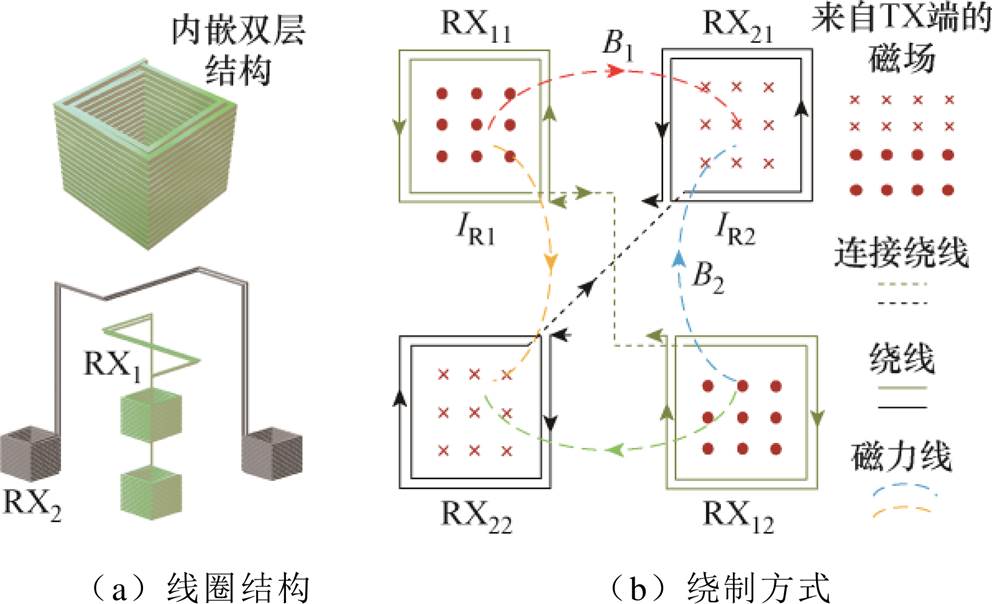
图5 双组合式螺线管绕制方式
Fig.5 Winding method of the dual-composite solenoid
为了解决接收端同侧线圈之间的互耦问题,本文采用了解耦策略。在该策略下,两个螺线管的反向电流能够相互抵消其对彼此的影响。例如,组合式螺线管RX1通过RX11和RX12产生的两个相反的磁通会在RX21中相互抵消,从而消除了RX1对RX21的影响。此策略同样适用于RX2与RX1之间,确保了两组接收线圈之间的干扰最小化,即MR1R2=0。
通过双组合式螺线管线圈设计与解耦策略的结合,接收端能够有效捕获旋转磁场的磁通,同时将多组线圈之间的互耦干扰降至最低。此外,将线圈设置在起落架位置,远离机身,既有效地降低了电磁干扰,也提升了设备的电磁安全性。在旋转磁场的驱动下,接收线圈能够稳定地捕获磁通,并输出高效可靠的电能,为无人机在复杂环境中的WPT提供了解决方案。
在WPT中,互感是衡量发射线圈与接收线圈之间通过磁场相互作用强度的关键参数。较大的互感值意味着更强的磁耦合,有助于提升能量传输效率。本文提出的双发射双接收耦合机构包含六个互感源,其中同侧线圈间的互感接近零,可忽略不计。其余四个互感来源于两个发射线圈与两个接收线圈之间的耦合作用。由于该耦合机构具有对称性,偏移时这四个互感值呈现对称性变化。
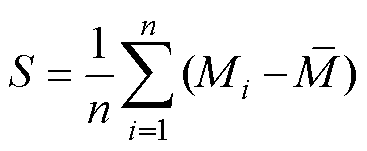
为了量化耦合机构在-100~100 mm偏移范围内的互感波动程度,引入变化率S,定义为
 (5)
(5)
式中, 为磁耦合机构在±100 mm内的互感平均值;Mi为第i次偏移的距离时的互感值。变化率S越小,表明该系统在该范围内的抗偏移能力就越强。本文的优化目标是通过调整耦合机构参数,扩大有效充电区域,减少偏移对互感的影响,从而提升系统的抗偏移能力。
为磁耦合机构在±100 mm内的互感平均值;Mi为第i次偏移的距离时的互感值。变化率S越小,表明该系统在该范围内的抗偏移能力就越强。本文的优化目标是通过调整耦合机构参数,扩大有效充电区域,减少偏移对互感的影响,从而提升系统的抗偏移能力。
发射端设计需要综合考虑无人机的尺寸以及可能的偏移范围。线圈外径LT依据无人机大小设定在450~550 mm之间,匝数NT取值范围为4~18,偏移范围为-100~100 mm。传输距离则根据无人机起落架的厚度设定为2 cm。为了增加充电区域面积,发射端设计了四个矩形充电区域,这些区域的面积决定了系统的抗偏移能力。每组双正交(DD)线圈采用上下双层结构设计,旨在保持高耦合性能的同时,通过减小线圈宽度来扩大有效充电区域。此外,通过优化TD和TQ线圈的不同层级布局,可以改善磁场分布。在此基础上,将双层结构扩展为四层,进一步增加了充电区域,同时平衡了两组发射线圈与接收线圈之间的距离差异对互感的影响。
接收端的设计充分考虑了无人机起落架的固定结构。相邻线圈的间距根据支脚间距设定为26 cm,线圈外径则依据支脚的尺寸确定为6 cm。这些设计参数可以根据不同类型的无人机进行灵活调整,从而确保接收端在实际应用中的适配性和优化性能。
为简化磁耦合结构的设计,首先选取发射端的初始参数作为基准,包括线圈的匝数和外径。虽然这些初始参数可能并非最优,但它们为后续的优化提供了合理的起点。
该设计需要确定的变量是发射线圈的匝数NT和外径LT、接收线圈的匝数NR和内绕层数TR。借助有限元分析软件Ansys Maxwell对其进行仿真设计,设计流程如图6所示。对图6中的耦合机构设计流程解释如下:
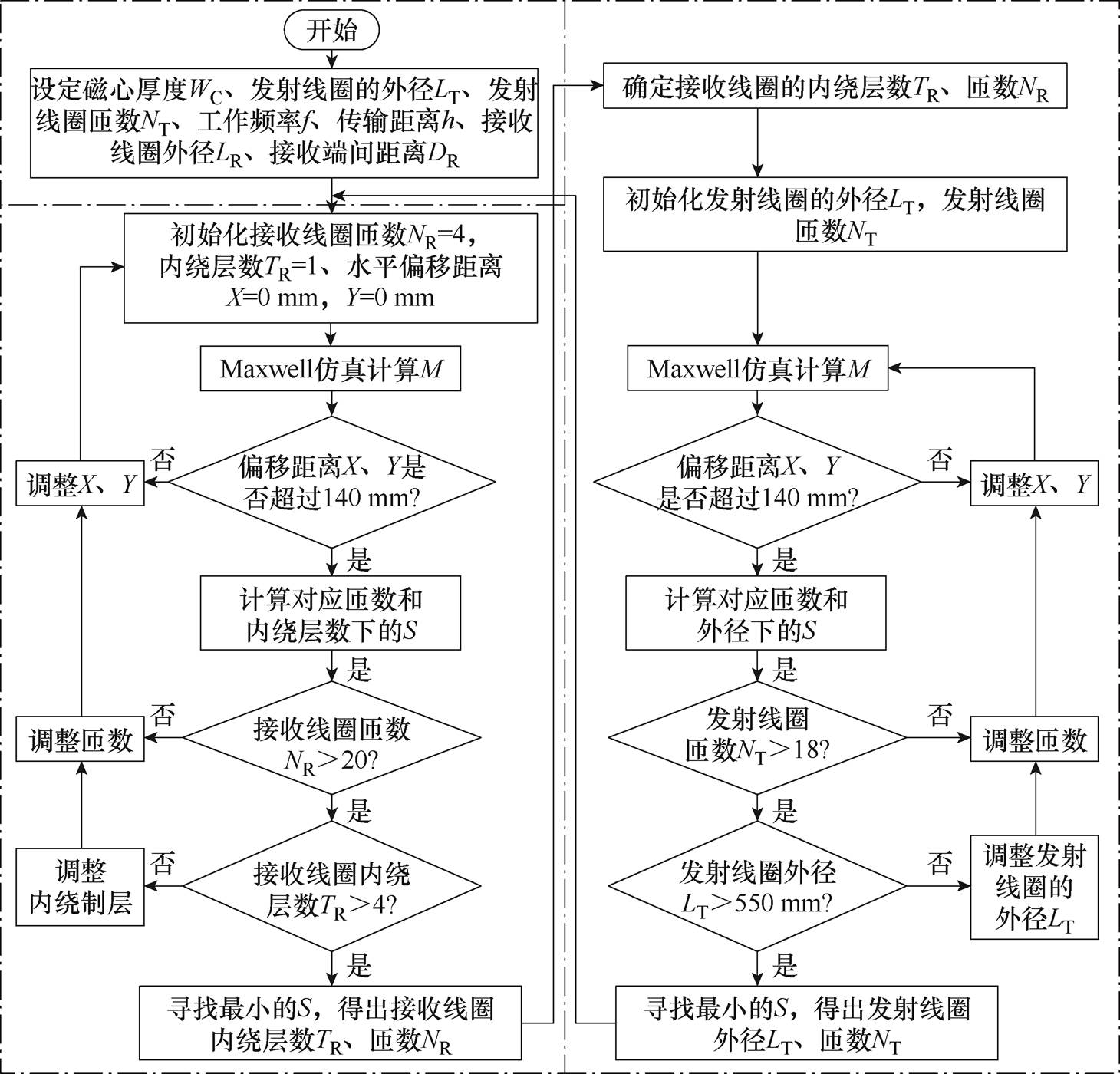
图6 磁耦合结构参数设计流程
Fig.6 Flow chart of parameters design of magnetic coupling structure
(1)设定发射端初始参数:磁心厚度,系统工作频率f0;设定发射端线圈的初始外径LT=500 mm和匝数NT=11。并选择磁心厚度WC与系统工作频率f0。通过Maxwell仿真计算偏移范围内的互感分布。
(2)优化接收端尺寸:通过Maxwell计算出100 mm内不同偏移距离下的互感值,然后代入公式(5)计算S。根据S的最小值,确定接收线圈的匝数NR和内绕层数TR。
(3)在接收端优化结果的基础上,调整发射端的参数,通过仿真计算出不同偏移距离下的互感值,并代入式(5)计算S。通过最小化变化率S来进一步优化发射线圈的匝数NT和外径LT。
(4)迭代优化:在完成发射端和接收端参数的初步优化后,通过多轮迭代优化,进一步精确调节发射端和接收端的参数。每轮迭代中,基于前一轮优化结果,对发射端参数进行微调,并再次进行仿真计算。通过这种方式,确保两端的参数在相互适配的情况下,达到最优性能,最终实现系统整体性能的收敛。
根据上述优化流程,最终确定接收线圈的匝数NR=15,内绕层数TR=2,并且其与变化率S以及互感M的关系如图7所示。优化结果表明,接收线圈的双层内绕结构与15匝的匝数最为匹配,能够最大程度地提高系统的抗偏移能力。
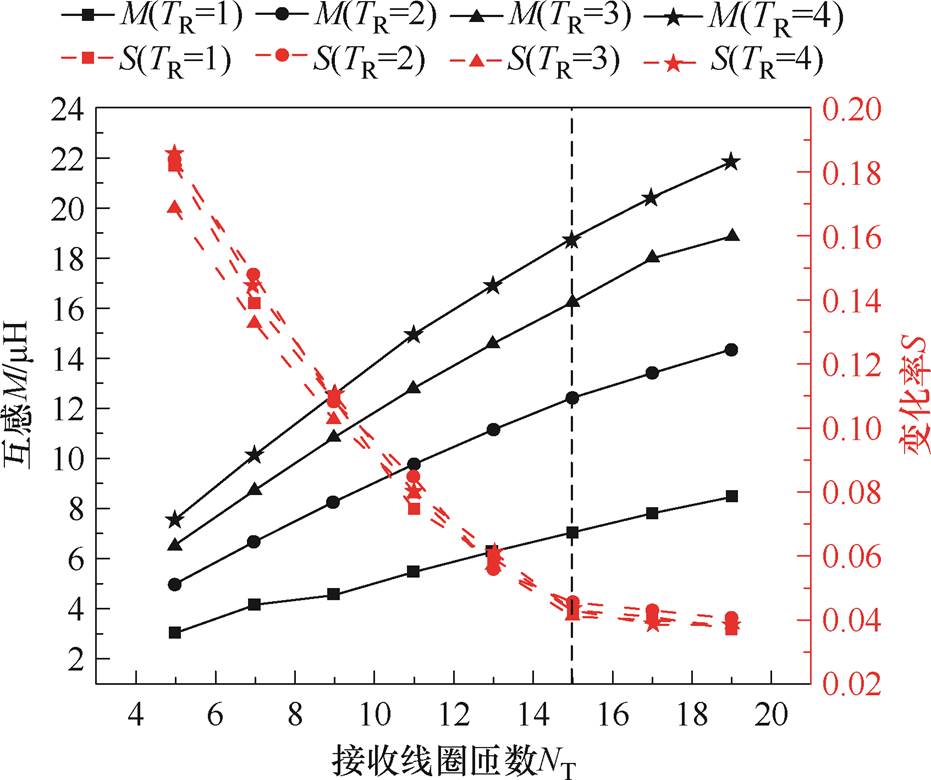
图7 接收端线圈优化
Fig.7 Coil optimization at the receiving end
在发射端方面,通过参数优化并确定了外径LT=490 mm和匝数NT=11,成功地提高了系统的性能。图8和图9展示了发射线圈外径和匝数对互感分布及变化率S的影响。
表1列出了双正交DD线圈-双组合式螺线管耦合机构优化后的各项参数,将为随后的相关分析和实验提供数据基准。
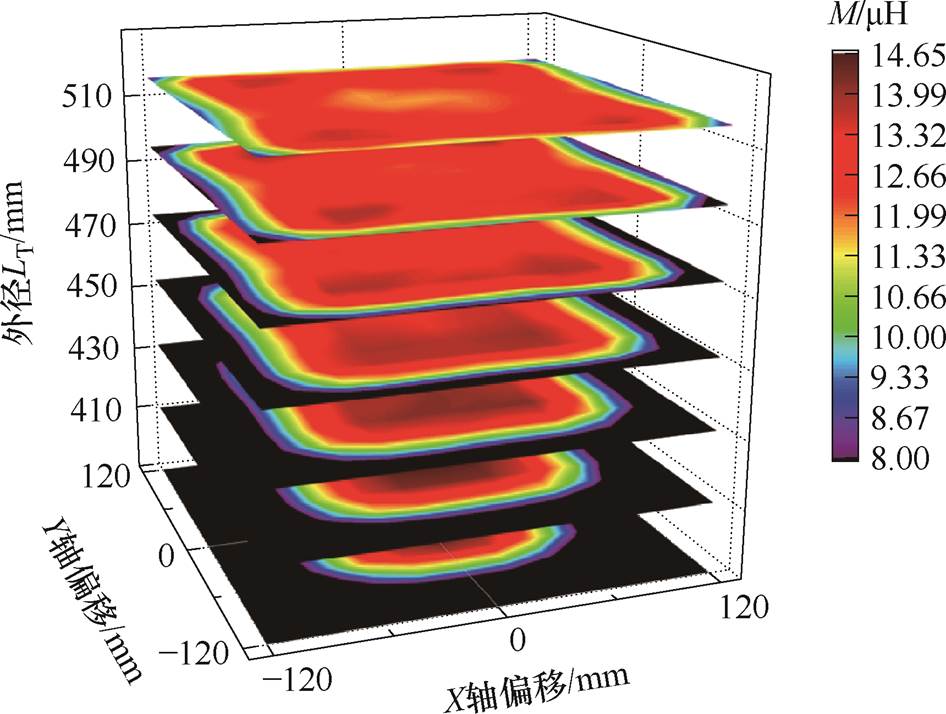
图8 发射线圈外径对互感分布的影响
Fig.8 Effect of transmitter coil outer diameter on mutual inductance distribution
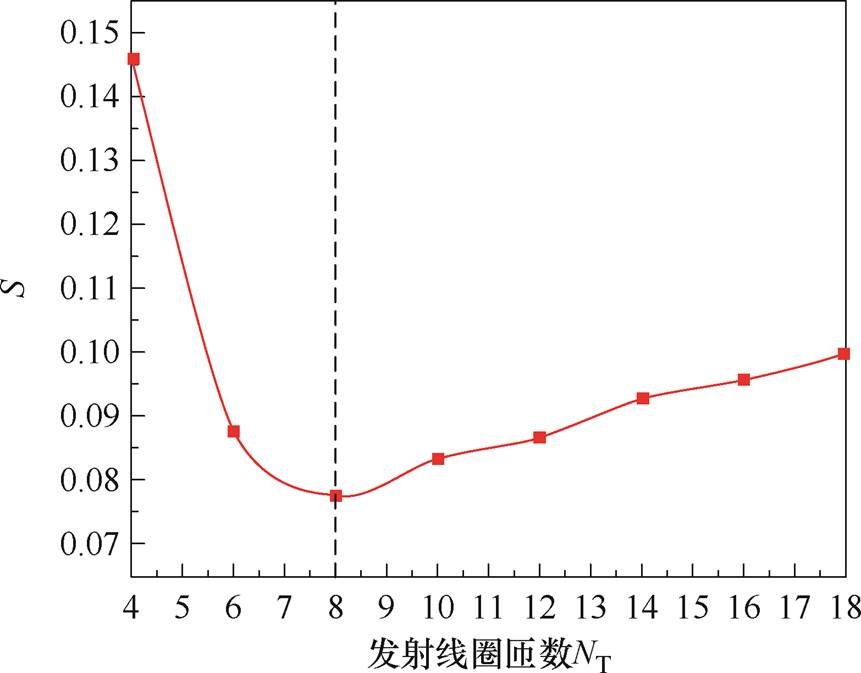
图9 发射线圈匝数优化
Fig.9 Optimization of transmitter coil turns
表1 磁耦合装置参数
Tab.1 Value of magnetic coupling device
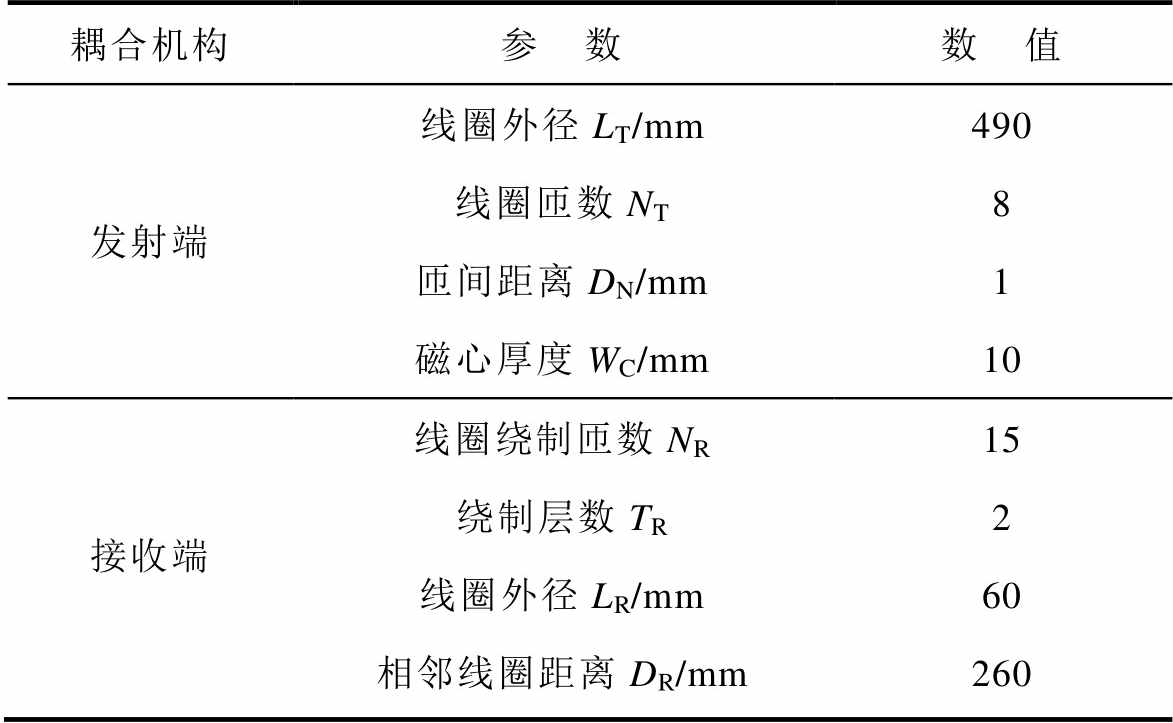
耦合机构参 数数 值 发射端线圈外径LT/mm490 线圈匝数NT8 匝间距离DN/mm1 磁心厚度WC/mm10 接收端线圈绕制匝数NR15 绕制层数TR2 线圈外径LR/mm60 相邻线圈距离DR/mm260
WPT系统拓扑如图10所示。为匹配双发射双接收的耦合机构,采用了双通道LCC-S补偿拓扑。LCC拓扑具有恒流输出的特性,原边采用双LCC拓扑结构,能够为发射线圈TD和TQ提供稳定的恒流激励电流,这为形成可靠的旋转磁场提供了基础,从而提高了系统的性能。S拓扑具有恒压输出的特性,副边采用该拓扑结构,接收通道A和B能够实现恒定电压输出,使得两个输出可以经过滤波后相互叠加。
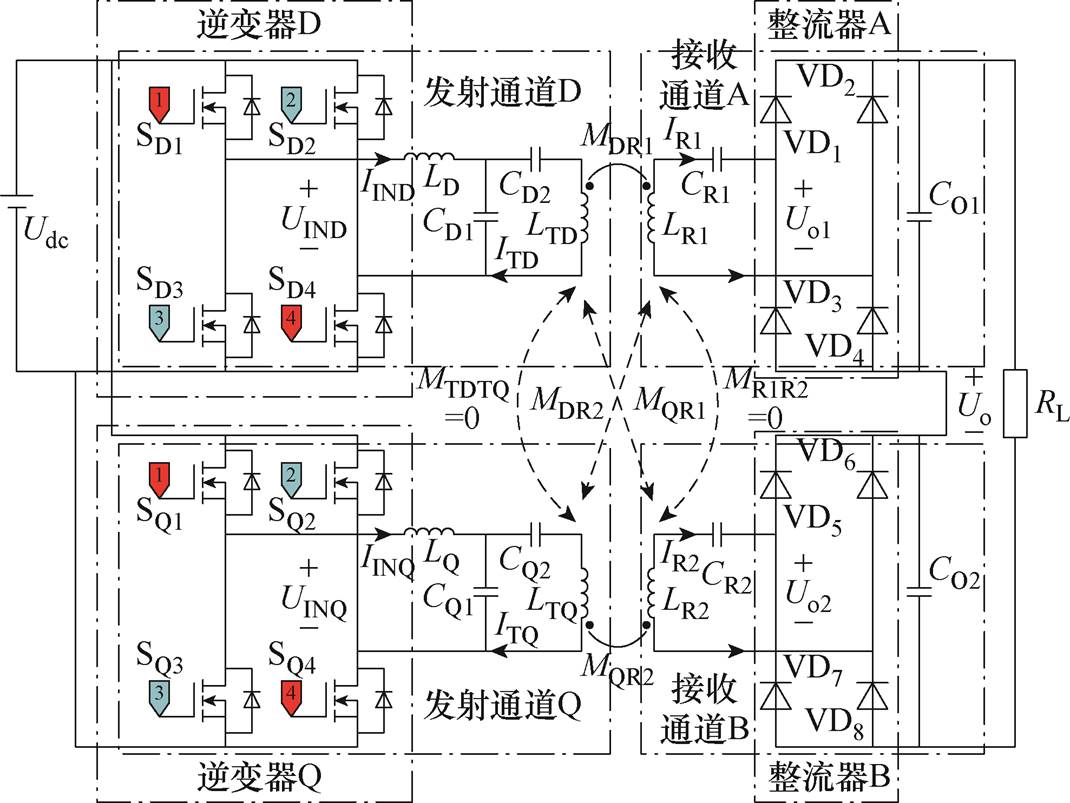
图10 WPT系统拓扑
Fig.10 Circuit of WPT
能量传输流程为直流电压源Udc通过发射通道D和Q中的逆变模块,分别转换为交流电压UIND、UINQ。随后,经过LCC补偿网络,将相位相差90°电角度的激励电流ITD和ITQ,分别输入发射线圈TD和TQ。通过磁场耦合,能量传递到接收端,接收线圈将磁场能量转换为交流电流IR1和IR2。然后,经过接收端补偿网络,向整流器输出交流电压Uo1和Uo2。最后,两个整流器的输出经滤波后合成直流电压Uo,为无人机进行充电。
系统拓扑中,SDi是逆变模块中的MOSFET开关管;LD、LQ、CD1(D2)和CQ1(Q2)是补偿拓扑中的原边补偿电感和电容;CR1和CR2是副边补偿电容;LTD、LTQ、LR1和LR2分别是发射线圈TD、TQ以及接收线圈RX1和RX2的自感;MTDTQ和MR1R2是同侧线圈之间的互感,由于满足同侧解耦条件,故两者可忽略不计;MDR1、MDR2、MQR1和MQR2是接收线圈与发射线圈之间的4个互感;VDi为整流模块中的二极管;Co1和Co2为滤波电容;RL为负载电阻。
对于接收端和发射端,由于接收线圈RX1和RX2之间相互解耦,同时发射线圈TD和TQ之间相互解耦,通过阻抗变换,整个系统的电路可以简化为如图11所示的等效拓扑。其中jwMDR1ITD和jwMQR1ITQ分别为发射通道D和Q等效到接收通道A的受控电压源。jwMDR2ITD和jwMQR2ITQ分别为发射通道D和Q等效到接收通道B的受控电压源。jwMDR1IR1和jwMDR2IR2分别为接收通道A和B等效到发射通道D的受控电压源。jwMQR1IR1和jwMQR2IR2分别为接收通道A和B等效到发射通道Q的受控电压源。
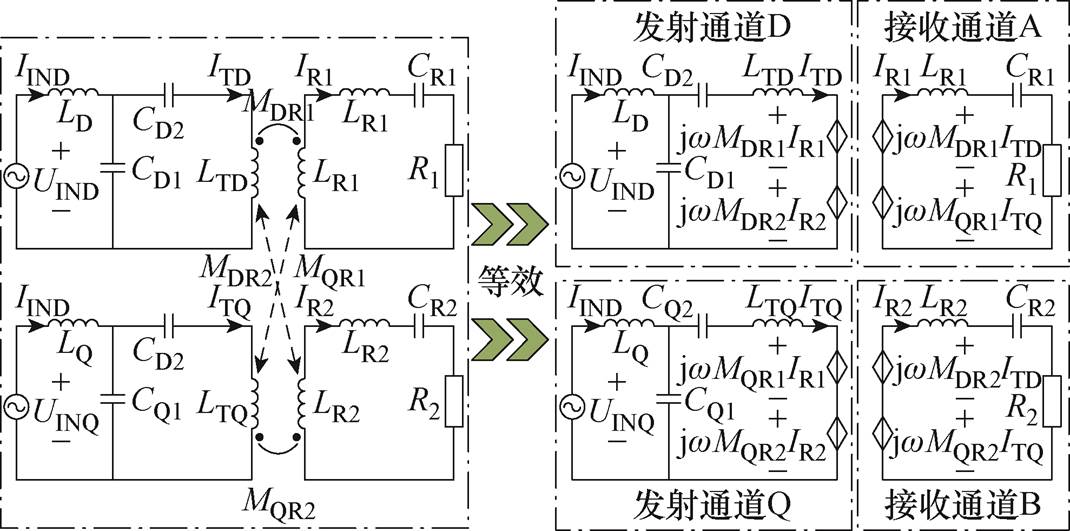
图11 等效拓扑结构
Fig.11 Equivalent topology
基于基尔霍夫定律对发射端的等效拓扑进行分析,逆变器的输出电压UIND和UINQ可以近似为正弦波源,其电压相量等效为
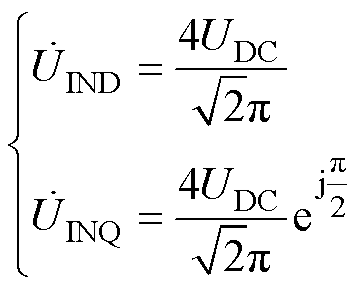 (6)
(6)
R1和R2是电池负载RL分别等效到接收通道A和B的等效电阻。根据电阻分压原理,R1和R2满足关系
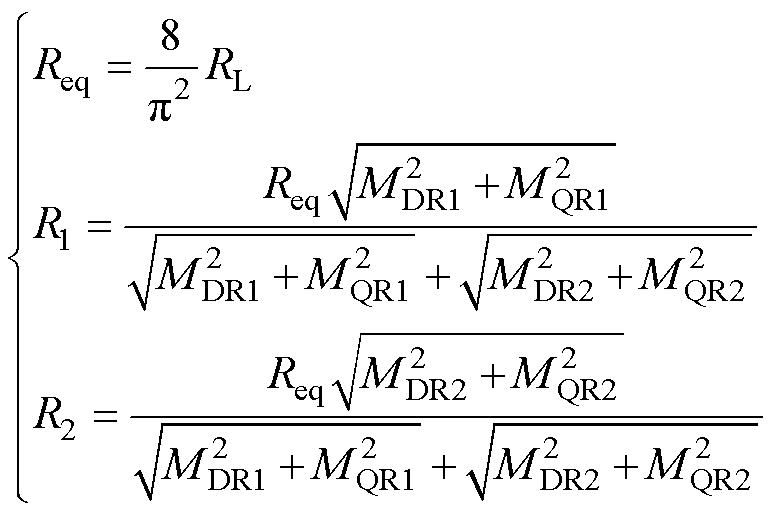 (7)
(7)
式中,Req为整流电路的等效电阻。
为了减少无功功率的消耗并提高传输效率,发射通道D和Q需要在谐振状态下运行。对应的发射端补偿元件应满足
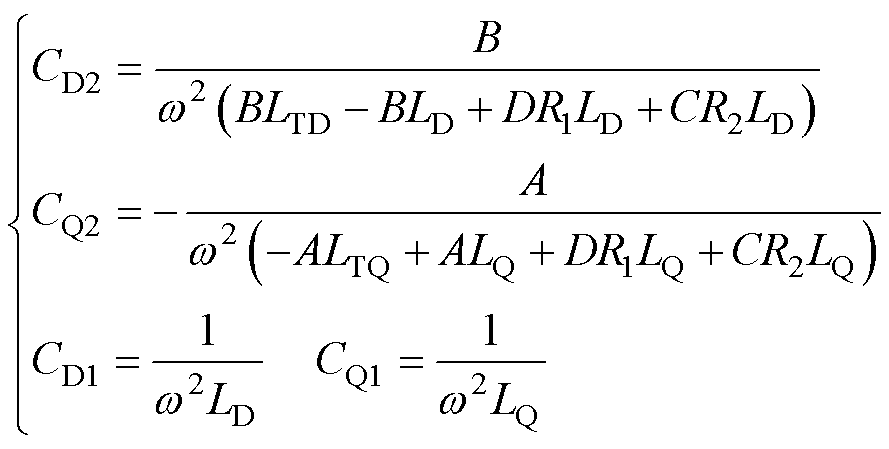 (8)
(8)
其中


接收通道A和B满足在谐振状态下运行,对应的补偿元件应满足要求
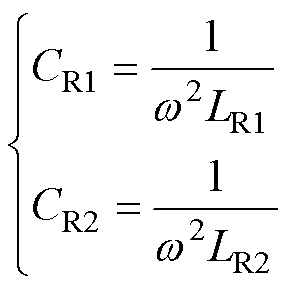 (9)
(9)
发射通道D和Q以及接收通道A和B都谐振时,接收线圈RX1和RX2感应到的电流IR1和IR2,发射通道D和通道Q的逆变器输出电流IIND和IINQ,以及发射线圈激励电流ITD和ITQ为
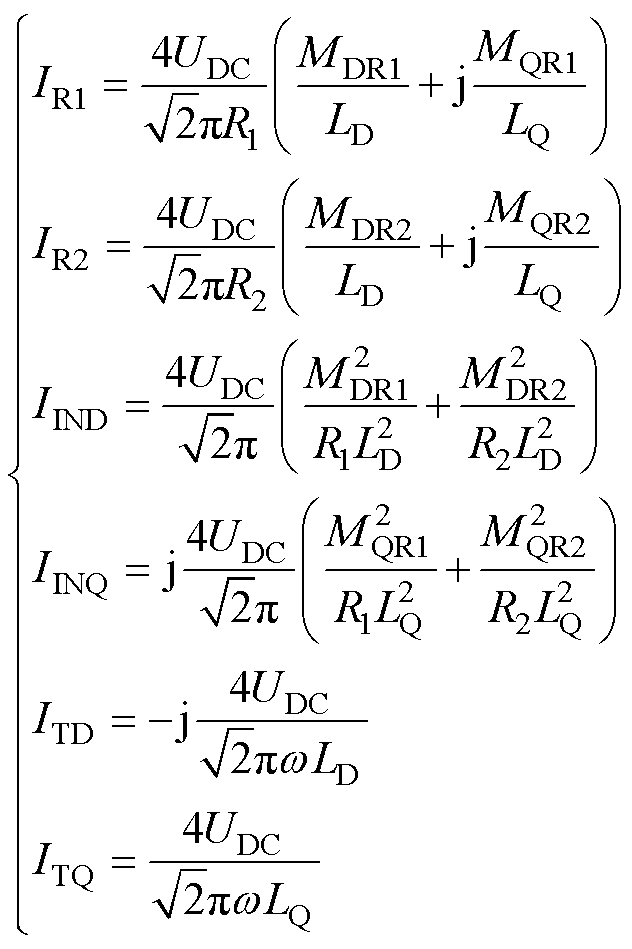 (10)
(10)
在此基础上可以进一步求得接收通道的输出电压Uo1和Uo2为
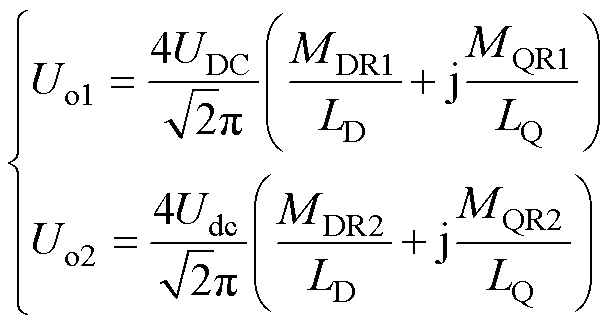 (11)
(11)
在原边补偿电感LD和LQ相等的条件下,联立式(7)~式(11)可以得到Uo为
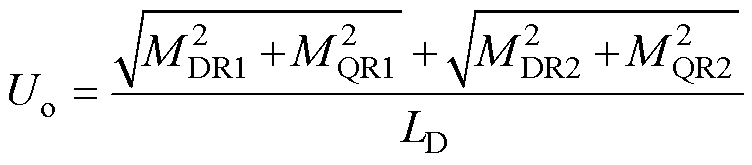 (12)
(12)
通过分析式(10),可以确定发射线圈的激励电流ITD和ITQ的幅值主要由直流电压源UDC和补偿电感LD、LQ决定,而不受负载等效电阻和互感的影响。由于发射通道D和Q采用了相同的补偿电感,因此,ITD和ITQ的幅值保持一致,且两者相位差固定为90°电角度。这表明,根据式(8)和式(9)进行补偿元件的参数配置,双通道LCC-S补偿拓扑能够满足双正交DD发射端对激励电流的要求,从而实现发射端恒流输出。
根据式(11)可得,接收通道A和B的输出电压Uo1和Uo2仅由直流电源UDC、发射端补偿电感LD和LQ以及耦合机构间的四个互感决定,而不受负载的影响。这表明,所构建的采用S补偿拓扑的接收端能够实现输出恒定电压,通过将两个整流器的输出串联,然后再经过滤波后,可以为无人机提供稳定的电压Uo,从而满足无人机充电稳定性的需求。具体电路参数配置详见表2。
表2 电路参数
Tab.2 Circuit parameters
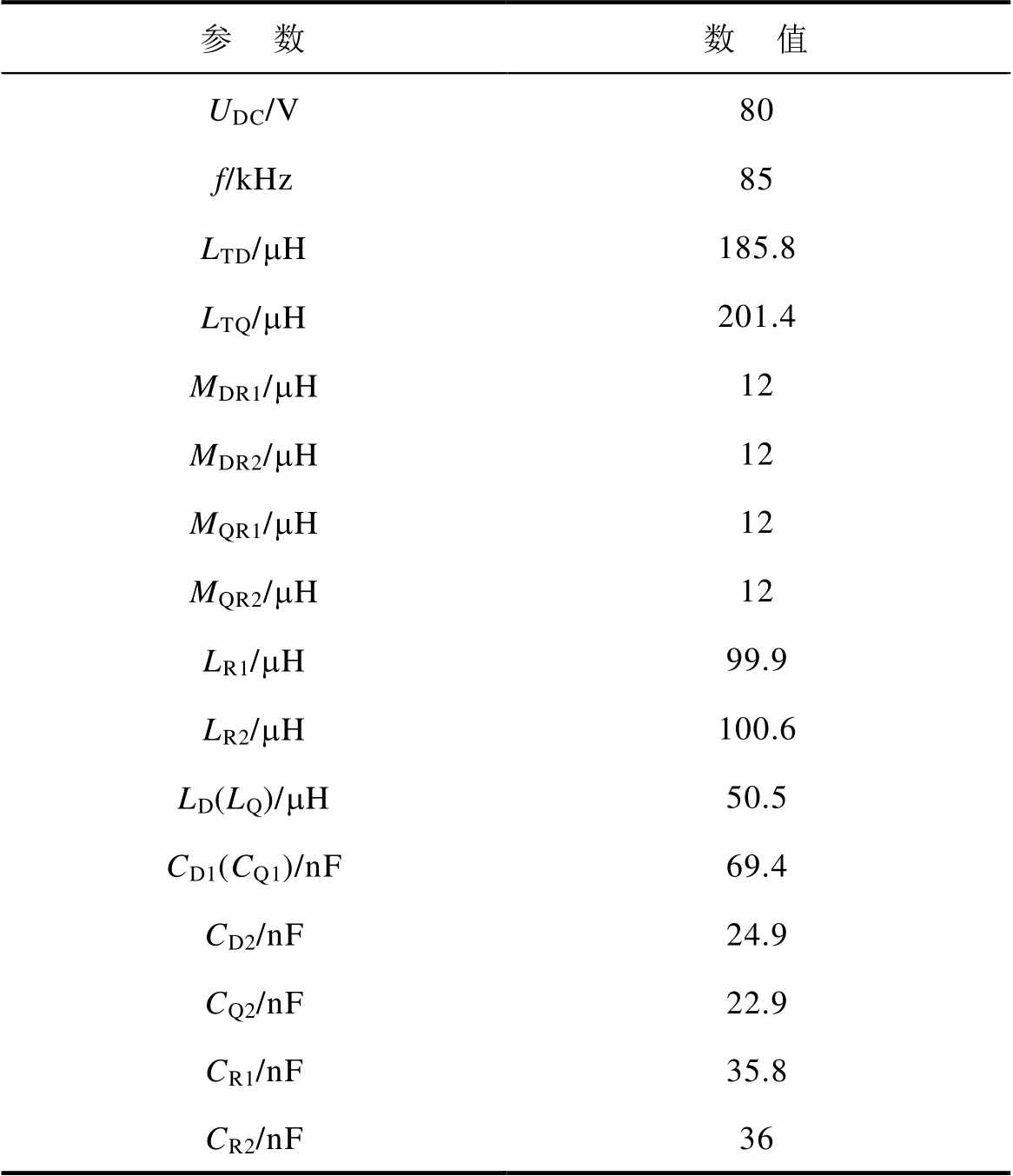
参 数数 值 UDC/V80 f/kHz85 LTD/mH185.8 LTQ/mH201.4 MDR1/mH12 MDR2/mH12 MQR1/mH12 MQR2/mH12 LR1/mH99.9 LR2/mH100.6 LD(LQ)/mH50.5 CD1(CQ1)/nF69.4 CD2/nF24.9 CQ2/nF22.9 CR1/nF35.8 CR2/nF36
为验证所提出方法的可行性,根据表1中耦合机构的整体尺寸以及表2中各补偿元件的配置参数,构建了如图12所示的无人机WPT实验样机。系统工作频率为85 kHz,负载RL默认为15 W。磁耦合机构中,每个发射线圈的外径均为490 mm,由0.1 mm×450股的利兹线绕制而成,共8匝。发射线圈下方的铁氧体磁心为边长490 mm的矩形、厚度为0.5 mm。考虑到无人机起落架的尺寸限制,每个螺线管线圈的尺寸均为60 mm×60 mm×60 mm,同样采用f0.1 mm×450股的利兹线绕制。发射线圈TD和TQ的内阻均为0.22 W,且它们之间的互感为0.15 mH。单个组合式螺线管线圈的内阻为0.13 W,两组组合式螺线管线圈之间的互感MR1R2为0.2 mH,相较于其自感可以忽略不计,证明了同侧线圈之间的有效解耦。
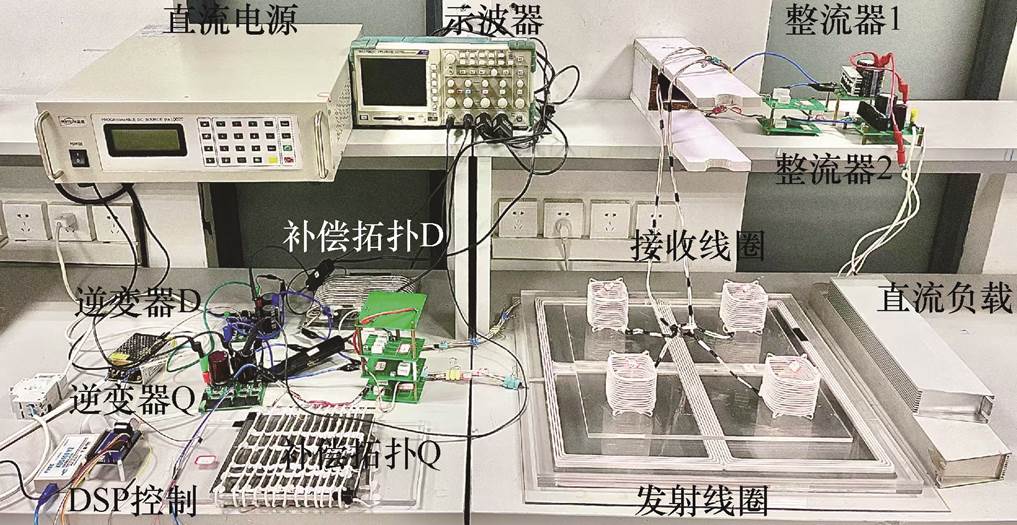
图12 实验样机
Fig.12 Experimental prototype
通过示波器观测WPT系统中发射端的工作状态和传输性能,得到图13所示的波形。实验分别在四种不同的工作条件下进行测试:在对齐位置下、水平偏移100 mm的情况下、旋转偏移40°以及负载变化为30 W时,测量了发射线圈TD和TQ的激励电流ITD和ITQ。根据实验结果,四种不同情况下,ITD和ITQ的有效值均在2.50~2.51 A之间,几乎没有变化。此结果验证了系统在不同负载和互感条件下,发射端能保持恒定的电流输出特性。
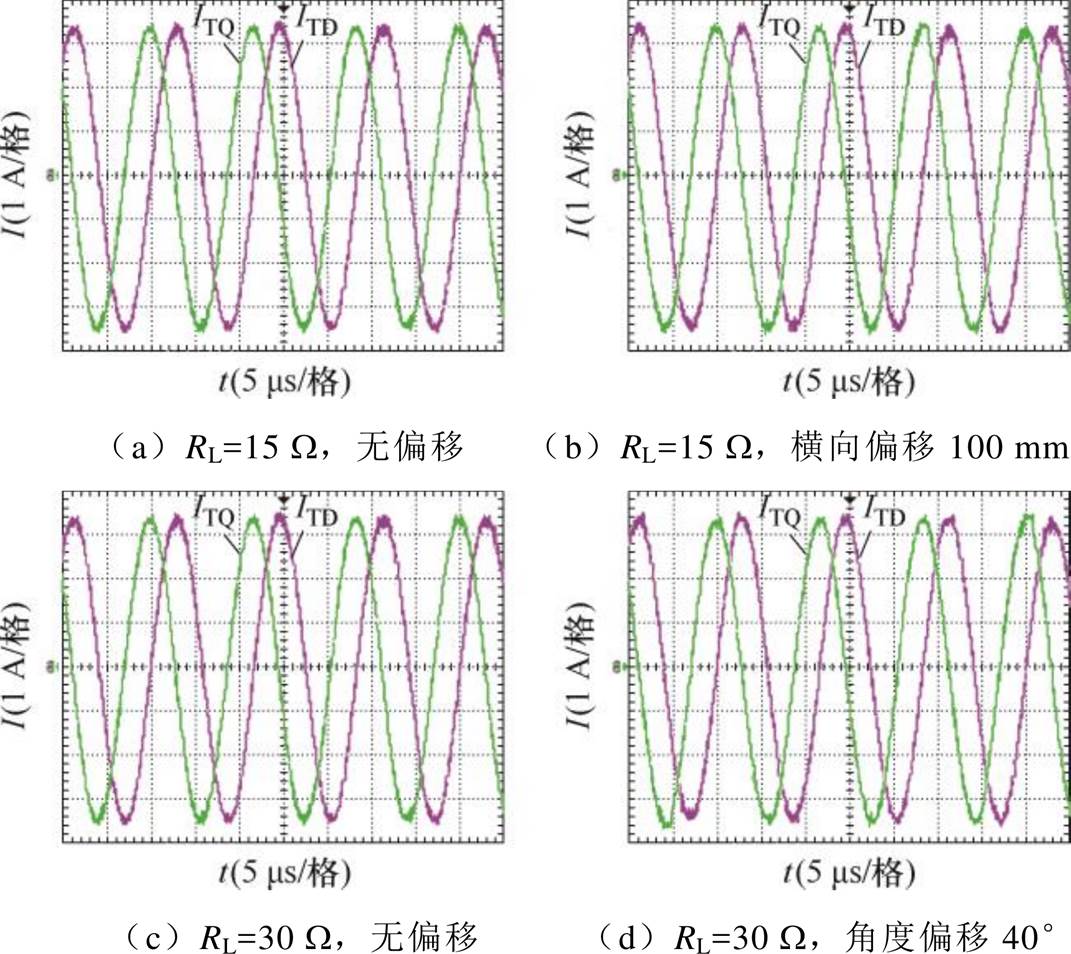
图13 不同负载和错位条件下发射线圈输入电流
Fig.13 Input current of transmitting coil under different load and dislocation conditions
在进一步分析同一条件下的发射线圈电流波形时,发现线圈TD和TQ的激励电流ITD和ITQ之间存在90°电角度的相位差,且幅值相等。这一现象表明,发射端工作在谐振状态,符合理论分析中的预期。具体而言,这一相位差和幅值相等的关系与式(10)中的理论推导一致,验证了旋转磁场激励电流设计的可行性。
通过示波器观测WPT系统中接收端的工作状态和传输性能,得到图14所示的波形。根据小型无人机的电池负载阻抗特点以及锂电池充电过程中的负载阻抗变化,实验分别在负载为10 W、15 W、20 W、30 W的工作条件下进行测试。根据实验结果,四种情况下,接收通道输出交流电压Uo1、Uo2均稳定在47 V左右。此结果验证了系统在不同负载下,接收端能保持恒定的电压输出特性。
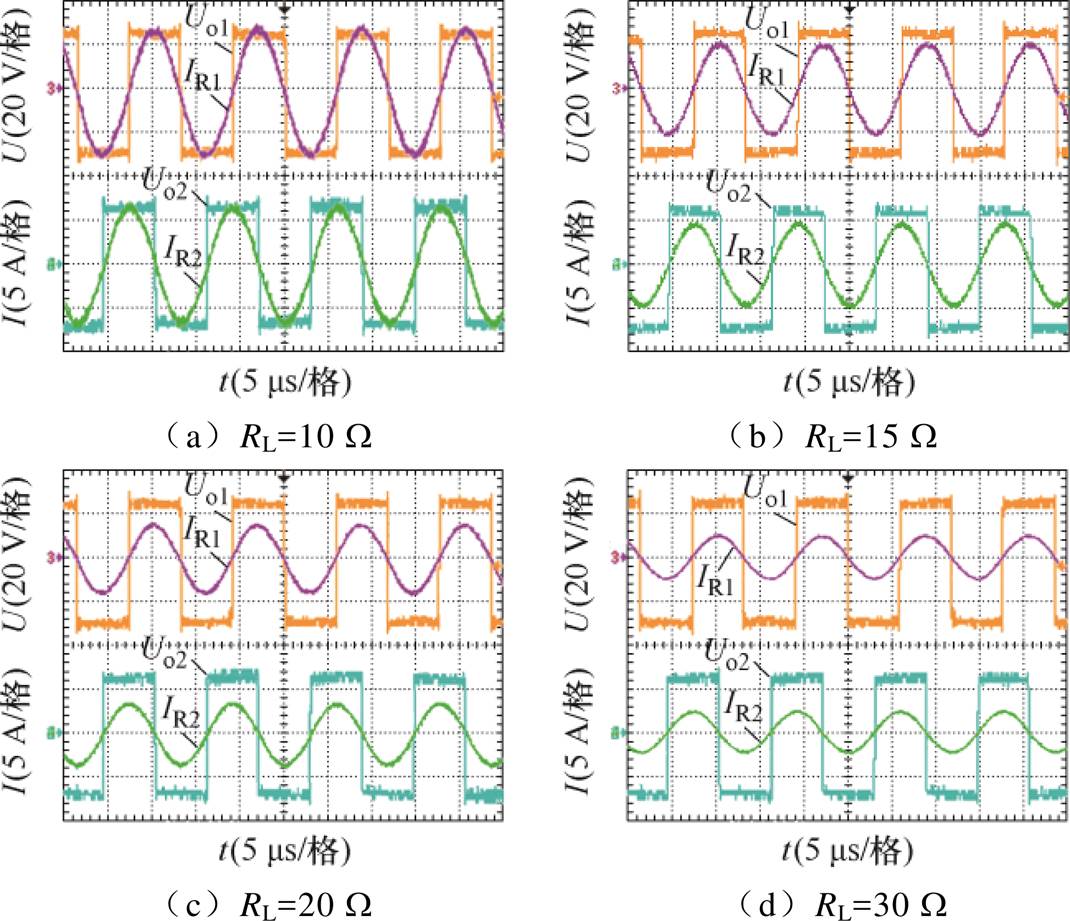
图14 不同负载条件下接收通道输出电压电流
Fig.14 Receiving channel output voltage and current under different load conditions
进一步分析同一条件下的接收端输出电压电流波形可知,Uo1和IR1之间、Uo2和IR2之间均同相位,表明两个接收通道均已达到谐振状态。此外,Uo1和IR1分别滞后Uo2与IR2 90°的电角度,且两者的幅值相等,与式(10)和式(11)的理论预测一致。这表明系统运行稳定,性能良好。
通过上述实验,双通道LCC-S补偿元件参数配置的准确性和有效性得到了充分验证。实验数据表明,所配置的补偿元件参数能够满足磁耦合机构在激励和利用旋转磁场方面的需求。实验以20 mm的传能距离为基准,进一步验证了磁耦合机构在120 mm水平偏移范围内的性能变化。在实验中,保持系统输入电压恒定,通过测量磁耦合机构在不同偏移条件下的输入输出功率,发现偏移会导致功率变化,进而影响系统效率。系统效率会因接收端偏移程度的增加而降低,但在±100 mm偏移范围内,效率变化幅度较小。图15所示为耦合机构偏移时的位置变化状态,其中单独输出区域是指位于该区域的接收线圈将仅与一个发射线圈相互作用。
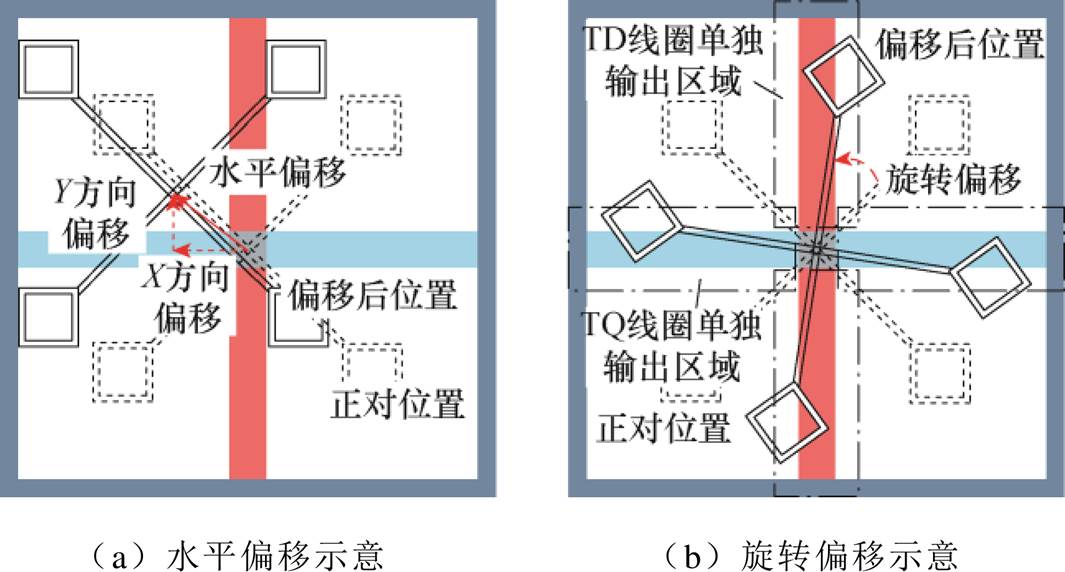
图15 偏移位置示意图
Fig.15 Offset position diagram
图16展示了水平偏移状态下互感和效率的变化规律。结果表明,当接收端在水平方向的偏移范围保持在[-100 mm, 100 mm]之间时,输出功率的波动小,整体效率保持稳定。这表明,该磁耦合机构在±100 mm的偏移范围内具有显著的抗偏移能力。
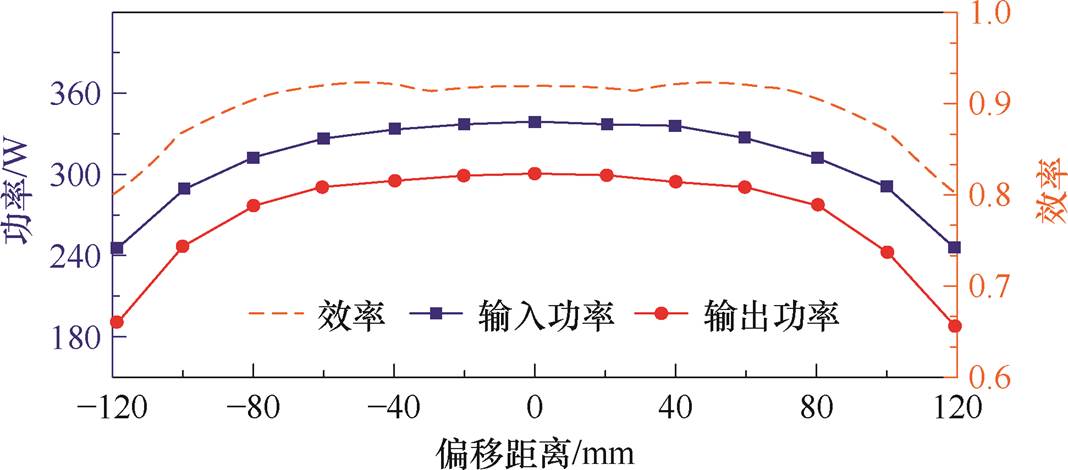
图16 水平偏移情况下输出变化
Fig.16 Power change under offset condition
图 17 展示了系统在-50°~50°旋转偏移范围内输出性能的变化规律。为更直观量化不同偏移角度下功率输出的相对水平,图中除折线外还以柱形图示出了系统输出功率的归一化比值,即各位置输出功率与0°对齐状态下功率的比值,并将该数值标注于各柱上方。从图中可以看出,耦合机构在±30°偏移范围内输出功率保持较高水平,表现出优异的稳定性,因此将该区域柱形以橙色突出显示;范围外的柱形则采用蓝色标识。由于结构对称性,未在图中展示的其他角度区间(如45°~135°、135°~225°和225°~315°)的变化趋势与已展示区间基本一致。需要特别说明的是,当接收线圈绕中心轴旋转偏移至30°~60°区域时,系统进入图15所示的独立输出状态。该区域内,传统单DD线圈设计通常因耦合失效出现能量死区,导致传输效率显著下降甚至中断。本文所提出的双正交DD发射线圈结构有效弥补了这一不足,在接收线圈处于该区域时,仍能保证至少一个发射线圈与其形成有效耦合,从而实现能量的连续传输,彻底消除能量死区,显著提高了无人机无线电能传输系统的稳定性和可靠性。
实验结果表明,即使在水平偏移和角度失调的情况下,接收线圈仍能有效捕获发射线圈的垂直磁通。这验证了双通道LCC-S各补偿元件参数配置的正确性,并能满足磁耦合机构产生并有效利用竖直动态旋转磁场的需求。也进一步表明了采用双正交DD-双组合式螺线管的无人机WPT系统在偏移条件下仍然具备高效的能量传输能力,展现出优异的抗偏移性能。
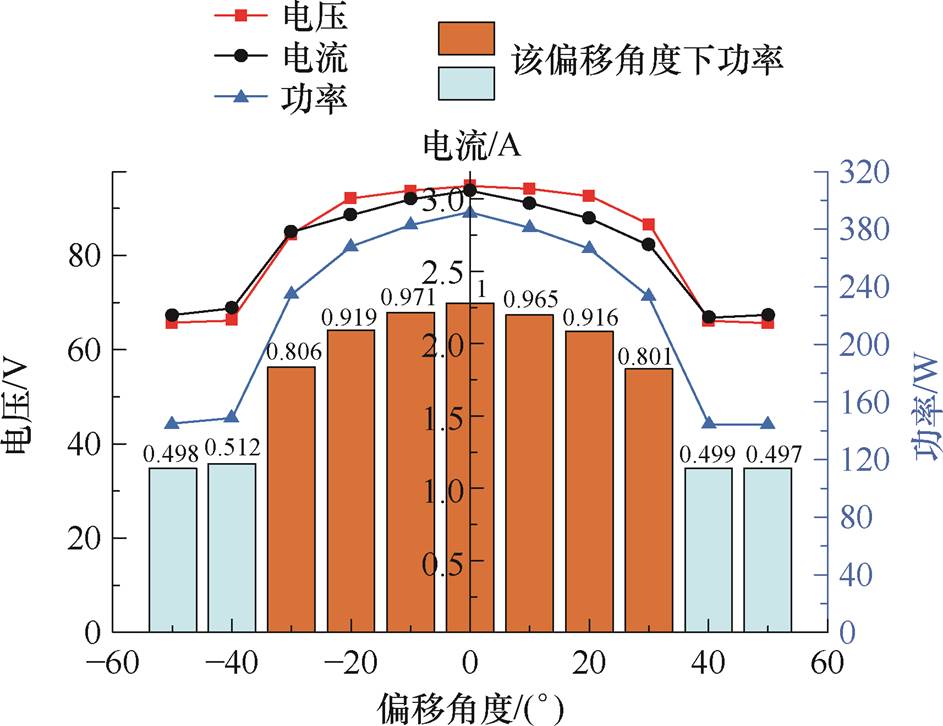
图17 旋转偏移下输出变化
Fig.17 Output variation under rotational offset
结合表3中国内外研究成果,本文提出的基于旋转磁场的新型WPT耦合机构,展现了多方面的创新性和性能优势。
表3 与现有工作对比
Tab.3 Comparisons with existing methods
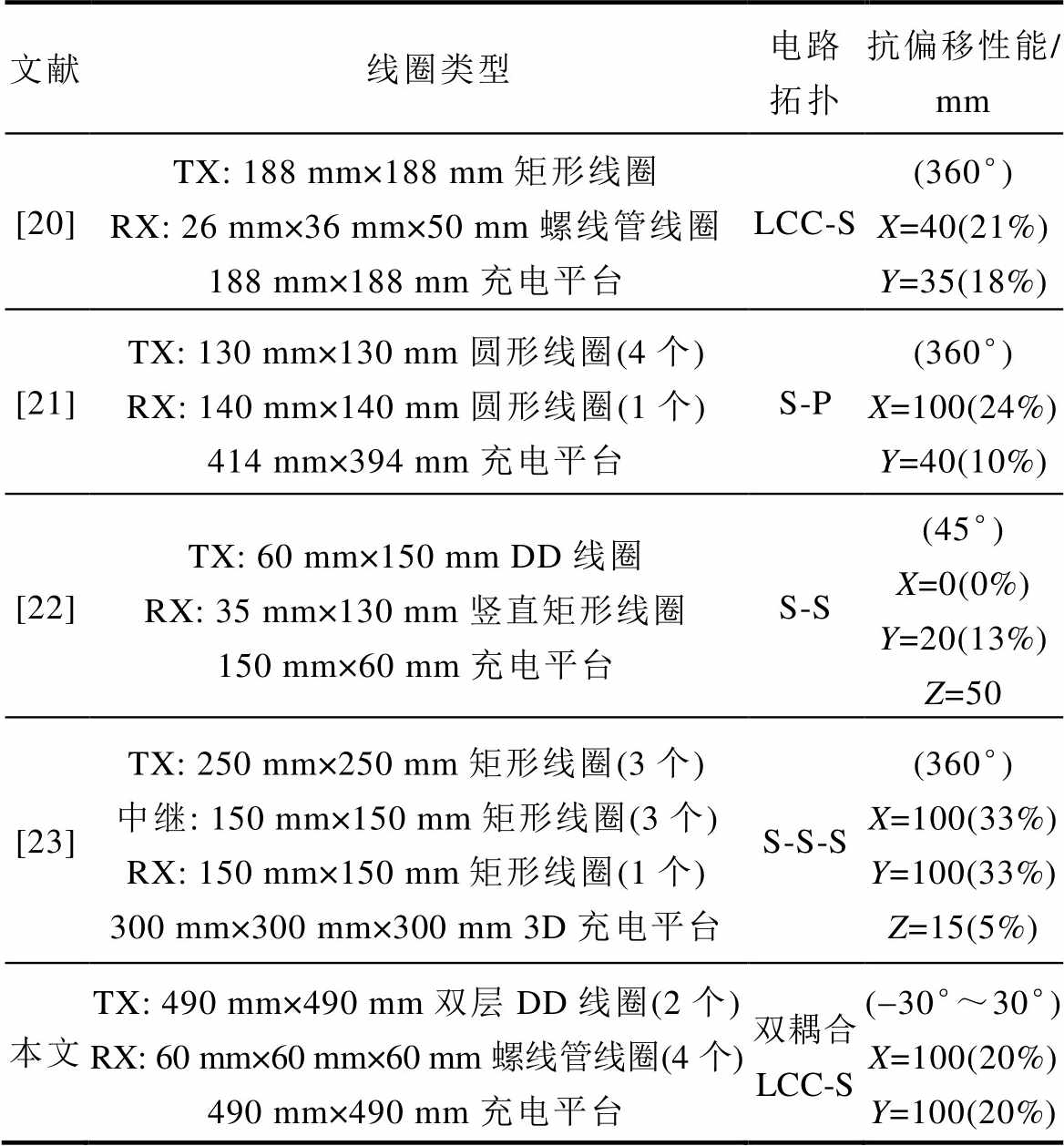
文献线圈类型电路拓扑抗偏移性能/ mm [20]TX: 188 mm×188 mm矩形线圈RX: 26 mm×36 mm×50 mm螺线管线圈188 mm×188 mm充电平台LCC-S(360°)X=40(21%)Y=35(18%) [21]TX: 130 mm×130 mm圆形线圈(4个)RX: 140 mm×140 mm圆形线圈(1个)414 mm×394 mm充电平台S-P(360°)X=100(24%)Y=40(10%) [22]TX: 60 mm×150 mm DD线圈RX: 35 mm×130 mm竖直矩形线圈150 mm×60 mm充电平台S-S(45°)X=0(0%)Y=20(13%)Z=50 [23]TX: 250 mm×250 mm矩形线圈(3个)中继: 150 mm×150 mm矩形线圈(3个)RX: 150 mm×150 mm矩形线圈(1个)300 mm×300 mm×300 mm 3D充电平台S-S-S(360°)X=100(33%)Y=100(33%)Z=15(5%) 本文TX: 490 mm×490 mm双层DD线圈(2个)RX: 60 mm×60 mm×60 mm螺线管线圈(4个)490 mm×490 mm充电平台双耦合LCC-S(-30°~30°)X=100(20%)Y=100(20%)
与文献[20]相比,本文采用双组合式螺线管接收线圈的设计,不需要额外添加磁心,无须考虑文献[20]中因接收线圈磁心易碎引发的结构安全隐患,同时提高了无人机在降落与飞行过程中的可靠性,并满足了接收端轻量化的设计需求。与文献[21]相比,本文通过优化线圈设计,无须复杂算法调整发射线圈位置,在无人机降落偏移时依然能够保持较高的功率传输效率;此外,本文设计有效规避了文献[21]因负载变化引起的充电性能不稳定问题,显著提升了系统的适应性和可靠性。与文献[22]相比,尽管本文在大范围旋转偏移能力上仍存在一定局限,但通过均衡X、Y方向的抗偏移性能,可在0°~30°及60°~90°的范围内实现更高的传输效率。与文献[23]相比,本文无须使用复杂的三维中继线圈结构,从而显著降低了系统的设计难度和对应用场景的限制;尽管文献[23]提供了更大的充电空间,其系统复杂性和场景局限性降低了实际应用的可行性,而本文设计则更加紧凑,环境适应性更强。综上所述,本文提出的系统在抗偏移性能、输出稳定性和系统简洁性等方面表现优异,为无人机无线电力传输提供了更高效可靠的解决方案,同时简化了实际应用的实现难度。
本文设计了一种创新的双正交DD-双组合式螺线管磁耦合机构,能够激发并有效利用空间旋转磁场,显著改善了无人机WPT系统中的漏磁、同侧线圈间交叉耦合以及着陆过程中发射端与接收端的偏移问题。旋转磁场的构建基于线圈布局和激励时间的协同优化。接收端组合式螺线管线圈的设计优势在于其优化的空间结构,能够满足无人机的特定需求并有效利用旋转磁场。本文为探索适合无人机WPT的抗偏移技术提供了新的思路。
本文所提出的耦合机构能够在发射端上方的四个矩形充电区域内产生均匀的垂直磁场,并在线圈中心形成闭环磁通量。在水平面±100 mm的偏移范围内以及每个象限中0°~30°、60°~90°的旋转偏移范围内,系统能够维持240 W的输出功率,效率不低于0.87。
参考文献
[1] 武帅, 蔡春伟, 陈轶, 等. 多旋翼无人机无线充电技术研究进展与发展趋势[J]. 电工技术学报, 2022, 37(3): 555-565.
Wu Shuai, Cai Chunwei, Chen Yi, et al. Research progress and development trend of multi-rotor unman- ned aerial vehicles wireless charging technology[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 555-565.
[2] 黄文聪, 饶天彪, 蒋煊焱, 等. 无线电能传输系统最大效率追踪及恒压输出复合控制方法[J]. 电工技术学报, 2024, 39(12): 3589-3601, 3615.
Huang Wencong, Rao Tianbiao, Jiang Xuanyan, et al. Maximum efficiency tracking and constant voltage output compound control method for wireless power transfer system[J]. Transactions of China Electrotech- nical Society, 2024, 39(12): 3589-3601, 3615.
[3] Liu Yeran, Madawala U K, Mai Ruikun, et al. Zero- phase-angle controlled bidirectional wireless EV charging systems for large coil misalignments[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 5343-5353.
[4] Li Yong, Hu Jiefeng, Li Xiaofei, et al. Efficiency analysis and optimization control for input-parallel output-series wireless power transfer systems[J]. IEEETransactions on Power Electronics, 2020, 35(1): 1074- 1085.
[5] Zhao Jingying, Wu Changzun. Research on control method and variable topology design of wireless power transmission system with coil offset[J]. IEEJ Transactions on Electrical and Electronic Engineering, 2022, 17(10): 1495-1505.
[6] 邹静, 徐耘英, 彭娟娟, 等. 基于频率切换实现电池恒流和恒压充电的LCC-S补偿WPT系统研究[J]. 电源学报, 2023, 21(3): 117-124.
Zou Jing, Xu Yunying, Peng Juanjuan, et al. Research on LCC-S compensated WPT system based on frequencyswitching to realize CC and CV charging for battery [J]. Journal of Power Supply, 2023, 21(3): 117-124.
[7] 张滨山, 张泽恒, 杨斌, 等. 基于钳位电路的LCC-S补偿型感应电能传输系统抗偏移方法[J]. 电工技术学报, 2024, 39(8): 2388-2399.
Zhang Binshan, Zhang Zeheng, Yang Bin, et al. LCC-S compensated inductive power transfer system against misalignment with a clamp circuit[J]. Trans- actions of China Electrotechnical Society, 2024, 39(8): 2388-2399.
[8] 陈永洪, 黎祎阳, 杨斌, 等. 基于多中继线圈结构的无线电能传输系统恒流/恒压输出方法[J]. 电力系统自动化, 2022, 46(20): 147-154.
Chen Yonghong, Li Yiyang, Yang Bin, et al. Constant- current/constant-voltage output method for wireless power transfer system based on multi-relay coil structure[J]. Automation of Electric Power Systems, 2022, 46(20): 147-154.
[9] 王鹏程, 潘立刚, 王懿杰. 基于D. D. D. 型松耦合变压器的无线电能传输系统研究[J]. 电气传动, 2023, 53(10): 29-35.
Wang Pengcheng, Pan Ligang, Wang Yijie. Research on wireless power transmission system based on D.D.D. loosely-coupled transformer[J]. Electric Drive, 2023, 53(10): 29-35.
[10] 赵永秀, 魏艺超, 王亚辉, 等. 基于“88Q” 线圈的三维抗偏移WPT系统[J]. 电力电子技术, 2024, 58(3): 81-84.
Zhao Yongxiu, Wei Yichao, Wang Yahui, et al. Three- dimensional anti-offset WPT system based on “88Q” coil[J]. Power Electronics, 2024, 58(3): 81-84.
[11] 杨奕, 张葛, 曹桂梅, 等. 基于多线圈阵列的单管无线电能传输电路优化[J]. 电工技术学报, 2023, 38(20): 5398-5410.
Yang Yi, Zhang Ge, Cao Guimei, et al. Optimization on single-switch wireless power transfer circuit based on multi-coils array[J]. Transactions of China Electro- technical Society, 2023, 38(20): 5398-5410.
[12] Rong Cancan, Chen Mengmeng, Duan Xiaoyu, et al. Optimized design of passive array coils for high- efficiency and anti-misalignment WPT system[J]. IEEE Transactions on Power Electronics, 2024, 39(5): 6504- 6514.
[13] Wang Qi, Li Xingcan, Yang Fei, et al. UAV-WPT system based on novel magnetic structure and model predictive control[J]. Sensors, 2023, 23(15): 6859.
[14] Arteaga J M, Aldhaher S, Kkelis G, et al. Dynamic capabilities of multi-MHz inductive power transfer systems demonstrated with batteryless drones[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5093-5104.
[15] Jawad A M, Jawad H M, Nordin R, et al. Wireless power transfer with magnetic resonator coupling and sleep/ active strategy for a drone charging station in smart agriculture[J]. IEEE Access, 2019, 7: 139839- 139851.
[16] Campi T, Cruciani S, Feliziani M. Wireless power transfer technology applied to an autonomous electric UAV with a small secondary coil[J]. Energies, 2018, 11(2): 352.
[17] Rong Cancan, He Xiangrui, Wu Yitong, et al. Optimization design of resonance coils with high misalignment tolerance for drone wireless charging based on genetic algorithm[J]. IEEE Transactions on Industry Applications, 2021, 58(1): 1242-1253.
[18] Cai Chunwei, Wu Shuai, Jiang Longyun, et al. A 500-W wireless charging system with lightweight pick- up for unmanned aerial vehicles[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 7721-7724.
[19] 张云, 黄伟义, 李玉博, 等. 高抗偏移及杂散磁场约束的无人机无线充电系统设计[J]. 电工技术学报, 2025, 40(12): 3692-3701.
Zhang Yun, Huang Weiyi, Li Yubo, et al. Design of a wireless charging system for drones with high anti-offset and stray magnetic field constraints[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3692-3701.
[20] Zhai Xuefeng, Wang Hongxing, Li Jun, et al. A wireless charging method with lightweight pick-up structure for UAVs[J]. Electrical Engineering, 2021, 103(6): 2847-2854.
[21] Rohan A, Rabah M, Talha M, et al. Development of intelligent drone battery charging system based on wireless power transmission using hill climbing algorithm[J]. Applied System Innovation, 2018, 1(4): 44.
[22] Wu Shuai, Cai Chunwei, Jiang Longyun, et al. Unmanned aerial vehicle wireless charging system with orthogonal magnetic structure and position correction aid device[J]. IEEE Transactions on Power Electronics, 2021, 36(7): 7564-7575.
[23] Han Wei, Chau K T, Jiang Chaoqiang, et al. Design and analysis of quasi-omnidirectional dynamic wireless power transfer for fly-and-charge[J]. IEEE Transactions on Magnetics, 2019, 55(7): 8001709.
Abstract With the widespread deployment of unmanned aerial vehicles (UAVs) in environmental monitoring, logistics, and disaster relief, the limitations of conventional lithium battery power, such as endurance constraints and payload restrictions, have become increasingly pronounced. Although fuel-powered and solar charging solutions have been proposed, their low energy density and conversion efficiency fail to meet the demands of long-duration operations. Magnetic resonance-based wireless power transfer (WPT) offers a promising alternative; however, coil misalignment during UAV takeoff and landing leads to significant efficiency degradation in existing systems. Current coupling mechanisms generally suffer from high magnetic leakage, strong mutual coupling between adjacent coils, and weak misalignment tolerance, necessitating innovative solutions.
To address these challenges, this study proposes a novel dual orthogonal DD-dual solenoid coil magnetic coupling mechanism that enhances misalignment tolerance by generating a rotating magnetic field. First, a three-dimensional electromagnetic model of the dual-channel coupling system is established, and the spatial magnetic field distribution of the orthogonal coil array is analyzed based on Maxwell’s equations. The transmitter adopts a layered dual orthogonal DD coil architecture, generating a synthetic rotating magnetic field in three-dimensional space by controlling excitation currents with a 90°electrical phase difference. The receiver employs a diagonally arranged solenoid coil array that captures dynamic magnetic flux using a spatial flux directional compensation principle while eliminating mutual coupling between adjacent coils.
Furthermore, a time-varying mutual inductance optimization model is developed by integrating finite element simulation with intelligent algorithms, addressing spatial adaptability and dynamic stability in a phased manner. Spatial optimization involves discrete magnetic field sampling to analyze flux path variations at different misalignment positions, iteratively refining coil geometric parameters to expand the effective coupling region. Finally, a dual-channel compensation control strategy is implemented with a cascaded resonant network topology. The primary LCC compensation module utilizes impedance transformation to match the transmitter’s dynamic load characteristics, achieving constant current output, while the secondary series compensation network integrates synchronous rectification to establish a load-adaptive voltage stabilization mechanism.
Experimental results demonstrate that the proposed coupling mechanism generates a uniform vertical magnetic field across four rectangular charging areas above the transmitter, forming a closed-loop magnetic flux at the coil center. Within a horizontal misalignment of ±100 mm, the output power of the system is kept above 240W, and the transmission efficiency is stable between 87.1% and 91.2%. Under ±30°rotational misalignment conditions, output power remains above 80% of the optimal value, with uninterrupted charging at any rotation angle. With the implementation of a dual LCC-S compensation topology, the control accuracy of the transmitter excitation current phase difference improves to within 0.8°, and the output voltage fluctuation remains below 2.1% under sudden load variations.
Simulation analysis yields the following conclusions: (1) The 90°phase-difference excitation of the orthogonal DD coils establishes a dynamic rotating magnetic field synthesis mechanism, fundamentally overcoming the severe efficiency drop observed in conventional static magnetic fields under misalignment conditions. (2) The solenoid coil array eliminates mutual coupling between adjacent coils through spatial flux directional compensation and a reverse-series topology while maintaining a magnetic flux capture efficiency of 92.3%. (3) The asymmetric parameter design of the dual-channel LCC-S compensation network, combined with a resonant point coordination mechanism, ensures that the transmitter maintains constant current excitation across the entire misalignment range, while the receiver achieves load-independent constant voltage output.
keywords:Wireless power transfer (WPT), unmanned aerial vehicles (UAVs), rotating magnetic field, magnetic coupling mechanism, anti-offset
DOI: 10.19595/j.cnki.1000-6753.tces.242249
中图分类号:TM724
国家自然科学基金青年基金资助项目(52207019)。
收稿日期 2024-12-11
改稿日期 2024-12-30
荣灿灿 男,1991年生,博士,讲师,硕士生导师,研究方向为无线电能传输技术与电磁超材料。E-mail: ccrong@cumt.edu.cn(通信作者)
段晓宇 男,1998年生,硕士研究生,研究方向为无线电能传输技术。E-mail: TS22230098P31@cumt.edu.cn
(编辑 郭丽军)