图1 HPFC拓扑结构
Fig.1 HPFC topology
摘要 混合潮流控制器(HPFC)因具备连续、精确调节潮流等优点,在新型电力系统中应用前景广泛。但在一些故障场景下,其存在过电压问题,影响HPFC设备安全。针对此问题,该文提出了一种结合无功功率自适应调节和带宽参数自适应调节的线性自抗扰策略以抑制混合潮流控制器全过程过电压控制的方法。首先,从HPFC结构原理出发,分析系统内部功率及过电压特性;其次,基于HPFC内部潮流方程与无功-电压耦合关系,提出自适应无功调控(ARPC)策略;然后,针对过电压抑制初始阶段短时过电压问题,通过分析线性自抗扰控制中核心带宽参数与系统输出响应之间的关系,设计一种控制器带宽参数自适应调节的线性自抗扰控制(A-LADRC)方法,以实现全过程过电压抑制;最后,基于RT-Lab实时仿真机和实际控制器,搭建了控制器级硬件在环实验测试平台,验证了所提方法对过电压抑制的有效性和优越性。
关键词:混合潮流控制器 自适应调节 线性自抗扰 过电压抑制
混合潮流控制器(Hybrid Power Flow Controller, HPFC)可以连续、精确地调节潮流,缓解区域潮流不均衡局面,以确保输电网络潮流通道畅通[1-2]。但新型混合潮流控制器由移相变压器(Phase-Shifting Transformer, PST)与电压源型换流器(Voltage Source Converter, VSC)结合,内部功率、电压特性复杂[3],故障时系统易出现无功特性主导的暂态过电压问题。且电力电子设备VSC的耐压能力差,容易因短时过电压出现损毁而退出运行[4]。因此,实际应用时需要解决系统过电压问题及抑制初期短时过电压以实现全过程过电压抑制。
目前,针对HPFC过电压问题的研究主要围绕绝缘配置和控制层面展开。文献[5-7]在分析UPFC过电压特性基础上设计绝缘保护以抑制过电压,但依靠绝缘保护抑制过电压的灵活性较差,且绝缘配置成本高;文献[8]从过电压分布特性展开,采用简单有效的绝缘配置方案,但动态响应能力较差;文献[9]分析了暂态过电压发生机理,为提高过电压抑制速度,从控制层面提出常规场景下过电压修正方法,但缺乏对不同故障工况下过电压的抑制;文献[10]借助无功补偿设备对过电压进行抑制,但缺乏对其内部功率特性的分析;文献[11-12]针对不同故障下VSC过电压提出通过控制功率分配与换流器关断实现对过电压的抑制,但控制难度大[13];文献[14]提出通过无功电流补偿以抑制过电压,降低了控制难度,但调节速度慢;文献[15]提出一种无功功率分散协同抑制过电压的方法,抑制速度较快,但仍存在一定的控制难度。因而,当HPFC因故障出现过电压时[15-17],需要对系统复杂的功率及过电压特性进行分析,从控制层面寻找简单有效的过电压抑制策略具有较高的实际价值。
同时,过电压抑制过程中传统PI调节[18-19]所能实现的响应速度较慢,存在过电压抑制初始阶段短时过电压问题,电力电子设备VSC易因短时过电压影响而退出运行。而自抗扰控制(Active Disturbance Rejection Control, ADRC)技术是在传统比例-积分-微分(PID)控制策略的基础上发展起来的控制策略[20],具有良好的抗干扰性能[21],通过将ADRC线性化处理[22],可以简化参数设计、加快动态响应速度,并保留原本的抗扰优势。文献[23]将线性自抗扰(Linear Active Disturbance Rejection Control, LADRC)应用于换流器的控制,并证明了其在稳定性、动态响应速度和抗干扰性方面的卓越表现。文献[24]将LADRC用于电机功率解耦控制中,提升系统响应速度及抗扰性能。文献[25]将LADRC用于储能系统并网控制,利用其较快的响应速度与抗扰能力降低了并网冲击。但对HPFC这类复杂的非线性系统而言,线性化处理后参数的不变性难以应对持续变化的过电压,因此,设计一种参数灵活调整的LADRC,快速响应初期短时过电压问题,实现全过程过电压抑制,对于实际应用具有重要的研究价值。
为了解决上述问题,抑制过电压现象,本文首先在分析HPFC正常运行及故障下系统功率特性与过电压特性基础上,提出一种基于系统内部无功-电压耦合关系的自适应无功调控(Adaptive Reactive Power Control, ARPC)策略;然后,为了实现系统响应速度提升及全过程过电压抑制,设计一种根据系统输出响应自适应调节控制器带宽参数的线性自抗扰控制(Adaptive Linear Active Disturbance Rejection Control, A-LADRC)方法;最后,通过RT-Lab实时仿真机和实际控制器搭建硬件在环实验测试平台,对所提策略进行验证。
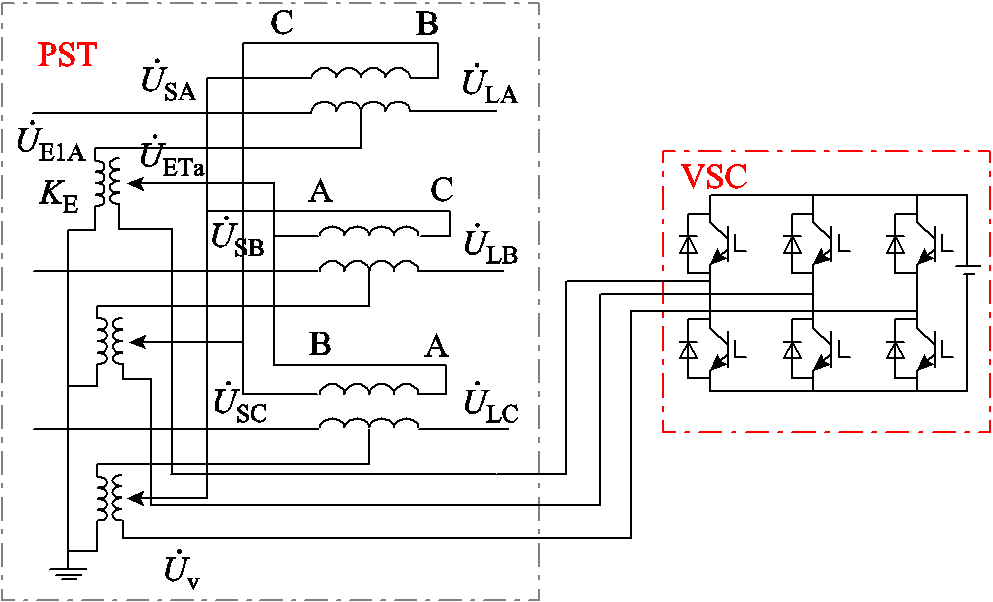
图1为本文采用的一种新型HPFC拓扑结构,由PST与VSC组成。其中PST由双心对称移相变压器+磁变压器(Excitation Transformer, ET)组成。串联变压器(Series Transformer, ST)一次侧串联于输电线路,二次侧角接;ET一次侧与二次侧均采用星形联结,且一次侧连接到ST一次绕组中点。
图1 HPFC拓扑结构
Fig.1 HPFC topology
线路功率潮流主要与线路两端电压以及相位差有关,具体传输功率为
 (1)
(1)
 (2)
(2)
式中,U1、U2分别为线路两端电压;θ为U1、U2的相位差;X为线路阻抗。
从式(1)、式(2)可知,对称型移相变压器调节电压相位差主要影响有功功率,对无功功率影响较小。
为克服PST对线路潮流离散控制的局限,在ET二次侧加设VSC设备组成新型HPFC。既可以利用PST的特性来减轻系统异常情况下对VSC可能产生的过电压冲击,也可以实现对系统潮流进行连续、精细的调节。
由系统内部PST等效电路推导HPFC数学模型。PST等效电路的推导需要考虑ST和ET的绕组联结、分接开关位置、匝比等参数信息,其等效电路如图2所示。
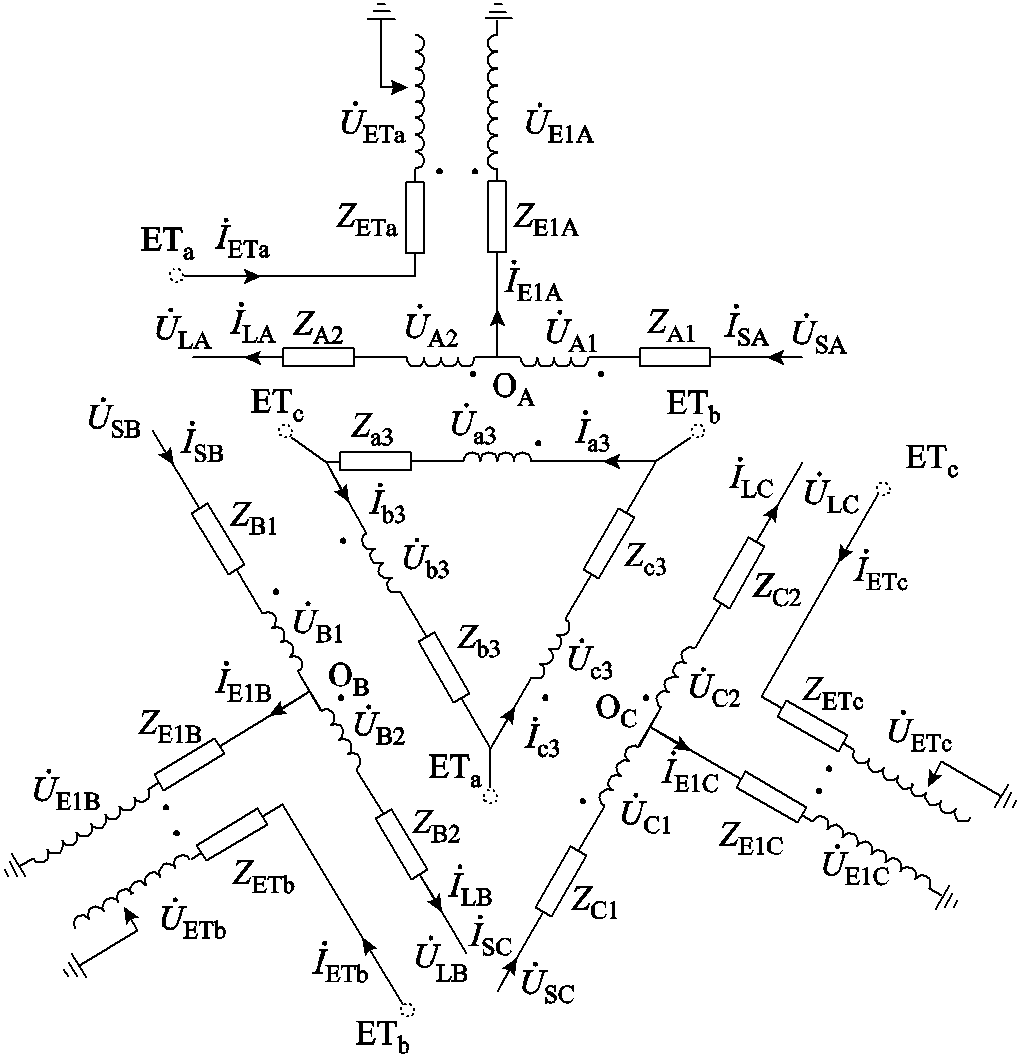
图2 对称双心移相变压器等效电路
Fig.2 Symmetrical two-core phase-shifting transformer equivalent circuit
ST一次绕组阻抗分别为ZA1、ZA2,O为一次绕组中点,两部分阻抗相等;二次绕组阻抗为Za3,匝比为KS;ET一次侧阻抗为ZE1;二次侧阻抗为ZET,匝比为KE。US、UL分别为输入电压与输出电压。匝比KS、KE分别定义为
 (3)
(3)
 (4)
(4)
式中,NA1、NA2、Na3为ST对应绕组匝数;NE1、NET为ET对应绕组匝数。
以A相为例,对其等效模型进行推导。
ST两侧电流相量关系为
 (5)
(5)
ET两侧电流相量关系为
 (6)
(6)
ST一次侧与ET一次电流相量关系为
 (7)
(7)
ST二次侧与ET二次电流相量关系为
 (8)
(8)
由式(5)~式(8)可得PST移相角 为
为
 (9)
(9)
ST两侧电压相量关系为
 (10)
(10)
ET两侧电压相量关系为
 (11)
(11)
ST一次侧与ET一次电压相量关系为
 (12)
(12)
ST二次侧与ET二次电压相量关系为
 (13)
(13)
PST输入电压与输出电压关系为

由式(9)~式(13),可化简式(14)为
 (15)
(15)
由式(15)可得PST等效阻抗Zeq为
 (16)
(16)
在ET二次侧通过外接VSC输出与ET二次电压同相或反相的电压对PST进行补偿,补偿后ET二次电压 为
为
 (17)
(17)
式中, 为VSC补偿到ET的(a相)电压;
为VSC补偿到ET的(a相)电压; 为VSC等效补偿后实际ET匝比。因此,VSC补偿后起到精细调节PST匝比的作用,实现对系统潮流的连续调节。根据式(9)、式(16)可得此时移相角与等效阻抗分别为
为VSC等效补偿后实际ET匝比。因此,VSC补偿后起到精细调节PST匝比的作用,实现对系统潮流的连续调节。根据式(9)、式(16)可得此时移相角与等效阻抗分别为
 (18)
(18)
 (19)
(19)
HPFC在线路中等效为一个匝比为复数的理想变压器与阻抗Zeq串联,如图3a所示。实际系统中HPFC的等效电阻与输电线路电阻很小,可以忽略。此时,线路输送有功功率计算公式为
 (20)
(20)
式中, 为线路输出端电压;Xeq为PST的等效电抗;XL为输电线路电抗;
为线路输出端电压;Xeq为PST的等效电抗;XL为输电线路电抗; 为输电线路两端电压相位差。
为输电线路两端电压相位差。
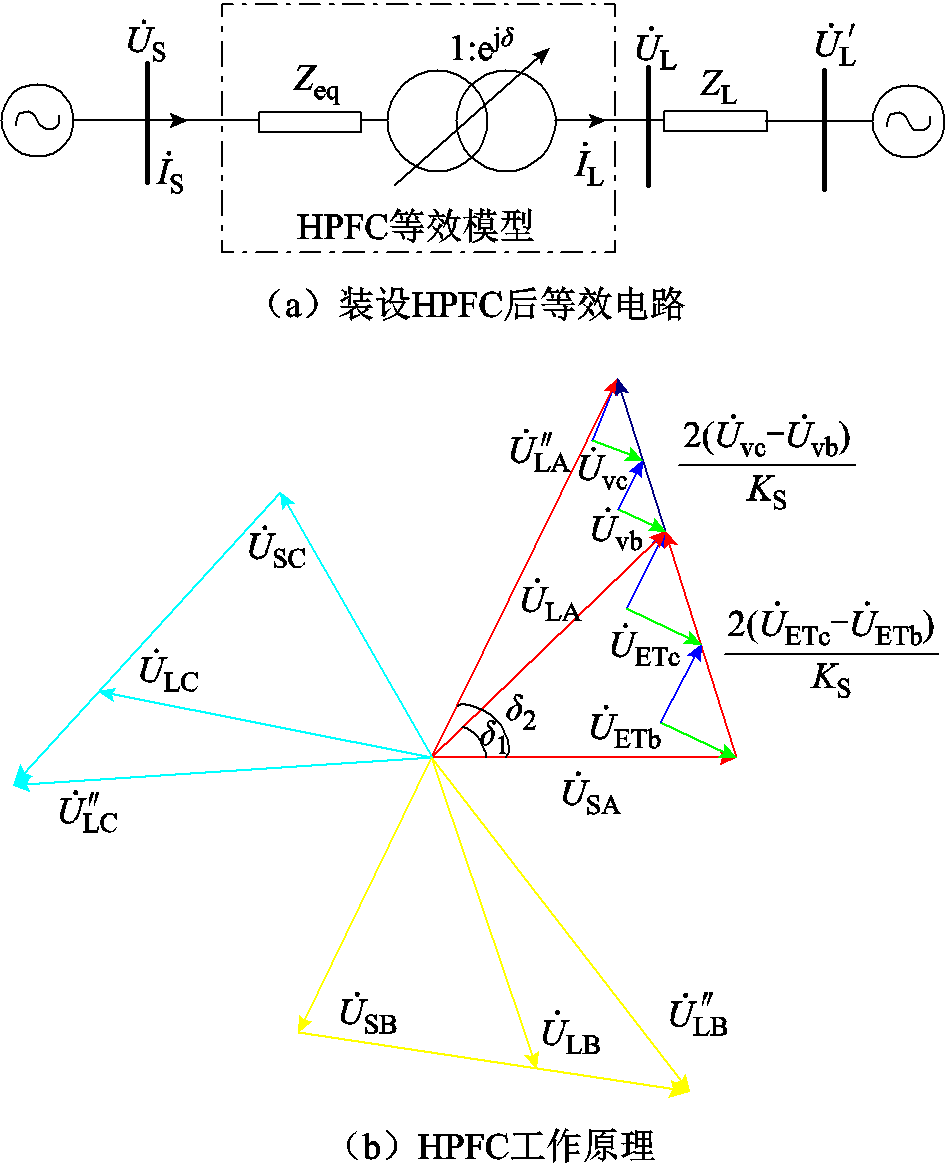
图3 HPFC等效电路及工作原理
Fig.3 HPFC equivalent circuit and working principle
当PST独立工作时,在给定PST参数下,通过调节变压器匝比,线路两端相位差为δ1,而目标功率对应的相位差为δ2。此时,VSC补偿电压,等效为调节ET匝比,使线路两端相位差达到目标值δ2,线路潮流达到目标值,具体如图3b所示。
结合大容量PST对潮流进行主要调节和小容量VSC对潮流进行微调,连续调节线路输送有功功率,从而达到调控稳态潮流、均衡多线传输系统潮流、提高断面输电容量等目的。
HPFC内部VSC交流母线处暂态过电压来源主要有外部交流系统故障和HPFC内部故障。这种暂态过电压现象不仅与具体的故障类型和发生位置紧密相关,还受到控制保护策略的影响。以典型的双机互联系统为例,搭建HPFC主电路如图4所示。
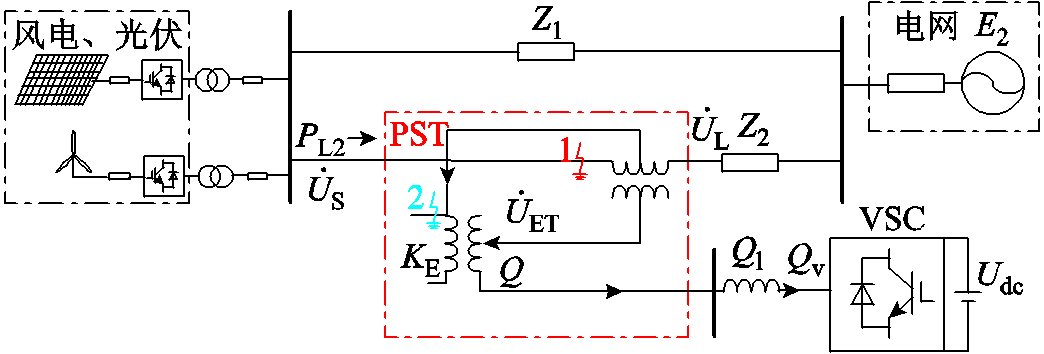
图4 HPFC主电路及故障位置示意图
Fig.4 Schematic diagram of HPFC main circuit and fault location
正常工况下,PST与VSC协调配合,系统功率平衡,有
 (21)
(21)
式中,QHE为传输给ET二次侧的无功功率;QET为ET的无功功率损耗;Ql为滤波电感消耗的无功功率;Qv为VSC消耗的无功功率。当HPFC网侧出现故障时,输入ST的电压US下降,并影响VSC交流母线侧电压。
由式(13)可知ST二次电压为
 (22)
(22)
由式(5)~式(8)可得ST一次侧输入电流为
 (23)
(23)
可化简式(12)得
 (24)
(24)
将式(22)、式(23)代入式(24)可得
在实际系统中,PST内部等效电阻很小,可忽略,则ET二次侧向VSC传输的功率为
US初始相角δ0为0,则
 (27)
(27)
ET二次侧传输无功功率为
 (28)
(28)
式中,Mcosα、Msinα分别为式(29)的实部、虚部;Ncosβ、Nsinβ分别为式(30)的实部、虚部;H为受系统参数影响的系数。
 (29)
(29)
 (30)
(30)
由式(28)可知,ET二次侧传输无功功率Q受PST两端电压、变压器匝比及漏抗影响。为详细分析HPFC内部ET传输无功功率Q与HPFC输入、输出电压US、UL的关系,采用控制变量法,在不同目标功率潮流及匝比、漏抗参数给定情况下进行计算与仿真,并将数据绘制成三维视图,如图5所示。
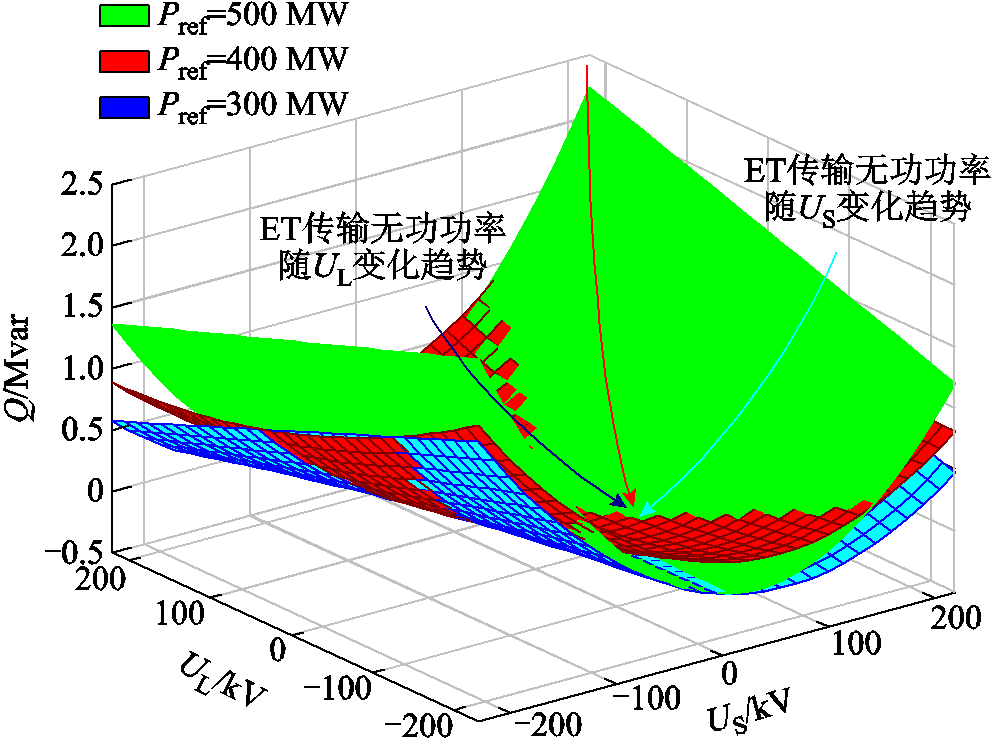
图5 ET传输无功功率变化
Fig.5 ET output reactive power changes
图5为ET传输无功功率Q变化曲线,分析图5可知,当目标功率潮流增大,对应ET匝比减小时,ET传输无功功率Q呈现向上平移趋势,表明外部线路传输功率潮流越大,ET传输无功功率也越大;随着ET匝比减小,无功功率Q曲面陡度整体呈增大趋势,表明ET匝比也会影响无功功率Q曲面陡度。整体来看,随着US、UL下降,ET传输无功功率Q呈现下降趋势。
以Pref=400 MW工况为例进行分析。网侧发生接地故障时,US、UL下降导致Q降低,而滤波电感吸收无功功率 受VSC交流母线电压影响,如式(32)所示。
受VSC交流母线电压影响,如式(32)所示。
 (32)
(32)
式中,UN、 分别为VSC交流母线正常情况下与故障期间电压;QlN为正常运行时滤波器消耗的无功功率。故障期间无功功率关系为
分别为VSC交流母线正常情况下与故障期间电压;QlN为正常运行时滤波器消耗的无功功率。故障期间无功功率关系为
 (33)
(33)
式中, 为经ET二次侧向VSC传输的无功功率。交流母线处无功功率变化为
为经ET二次侧向VSC传输的无功功率。交流母线处无功功率变化为
 (34)
(34)
此时,交流母线电压变为
 (35)
(35)
式中,DP为故障时VSC交流母线处有功功率变化量;X为ET至VSC等效电抗。
因有功功率变化量对交流电压的影响远小于无功功率的影响,忽略有功功率变化量的影响,无功功率变化量对交流电压的影响可表示为
 (36)
(36)
以最严重故障三相接地短路为例,设置如下两种故障工况:工况1,HPFC外部交流系统在2 s时发生三相接地故障,故障持续时间为1 s;工况2,内部ET外接线在2 s时发生三相接地故障,故障持续时间为1 s。两种工况下系统特性如图6、图7所示。
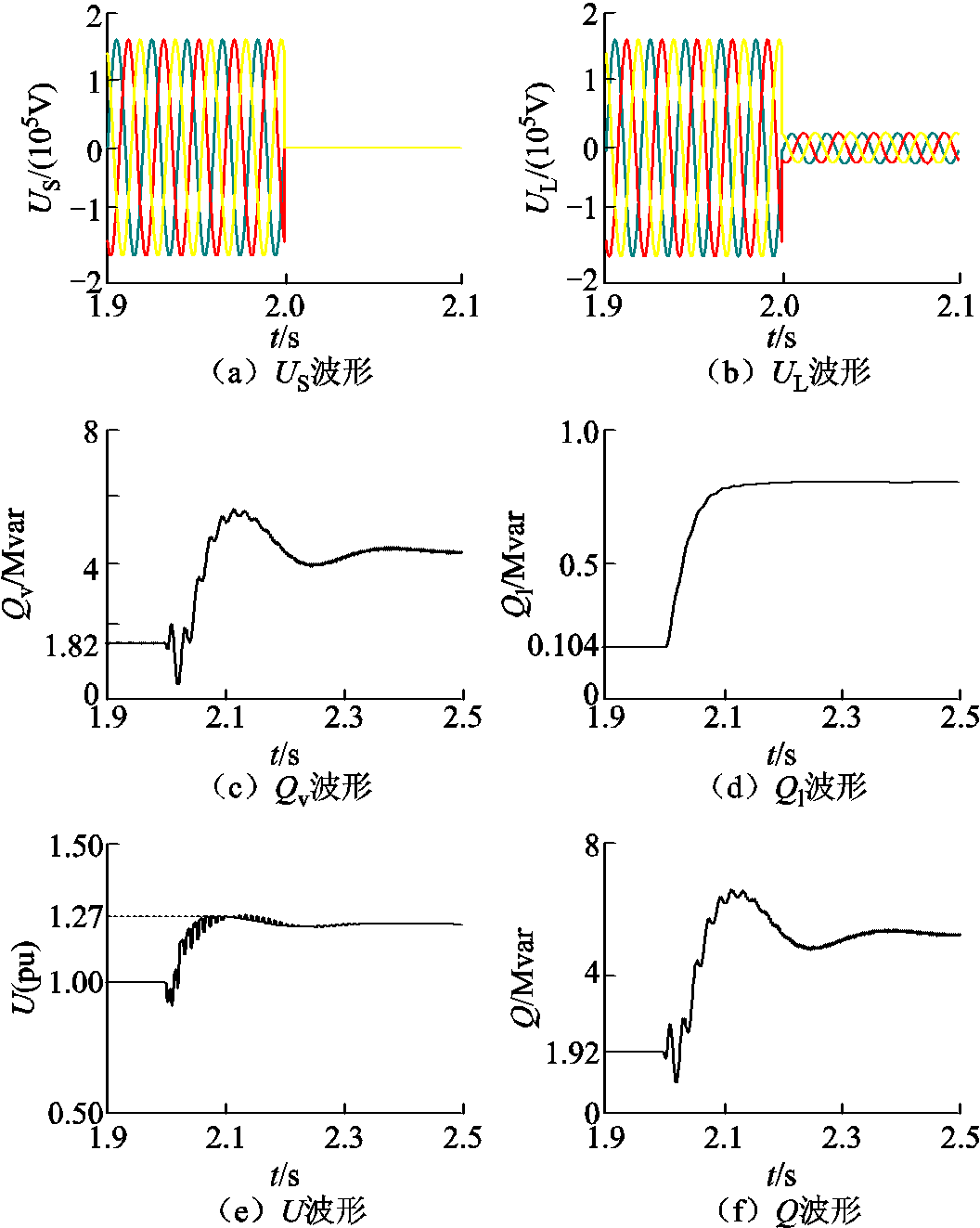
图6 工况1中系统特性
Fig.6 System characteristics in working condition 1
工况1下,如图6a、图6b所示,US三相电压变为0,UL大幅降低,但不为0,由式(28)可知初始阶段流向VSC的无功功率下降,与图5一致,相应Ql、Qv降低。而该目标功率潮流下,VSC补偿电压同原ET二次电压反相,ET二次电压大幅下降后受VSC补偿电压影响。此时ET二次电压为
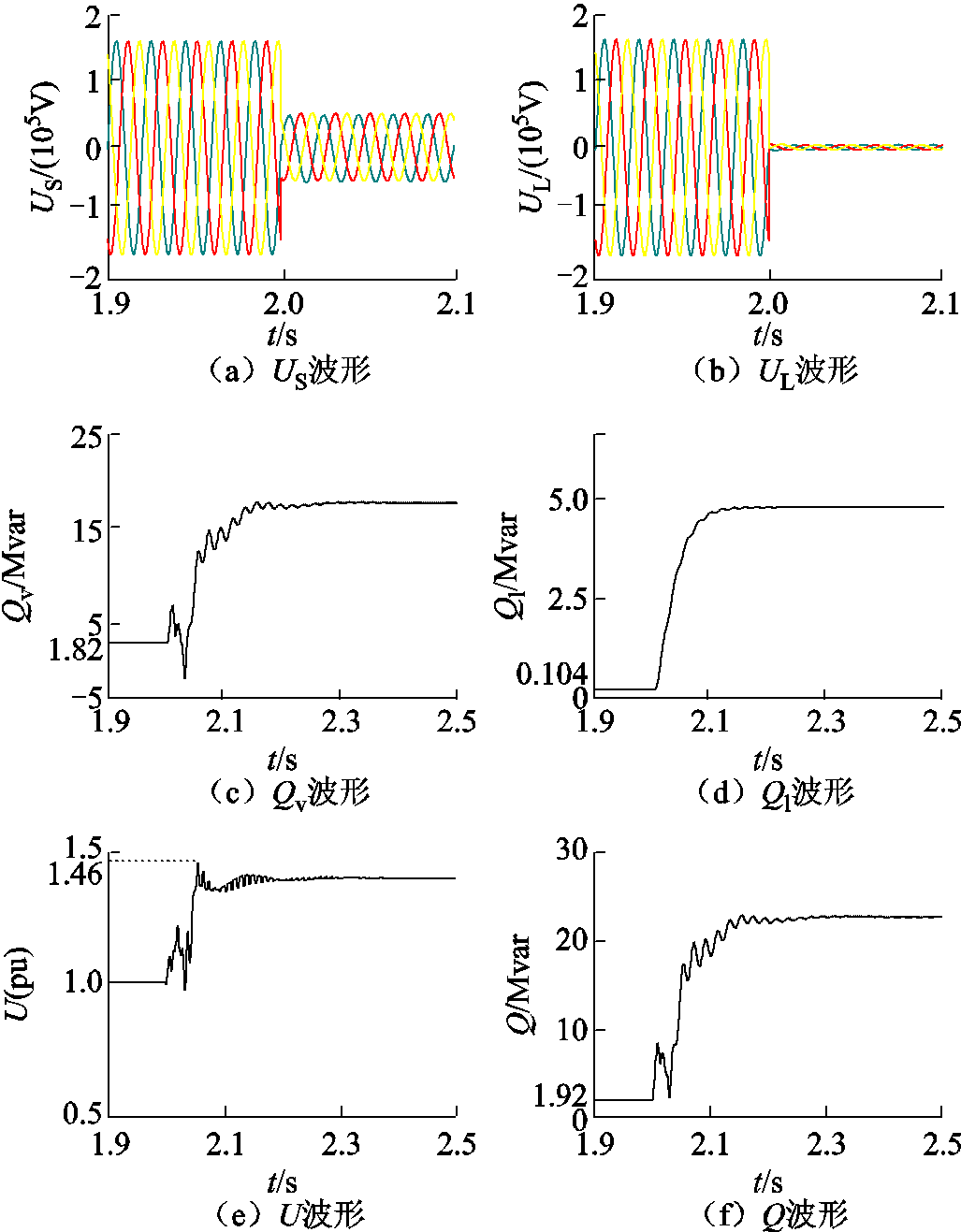
图7 工况2中系统特性
Fig.7 System characteristics in working condition 2
 (37)
(37)
 与VSC补偿电压同相,且幅值略大于VSC交流母线电压。同时,受主电路短路电流影响,IET迅速增大,传输至ET二次侧无功功率大部分流向VSC,少部分由ET损耗。VSC吸收无功功率迅速增大,由式(33)可知
与VSC补偿电压同相,且幅值略大于VSC交流母线电压。同时,受主电路短路电流影响,IET迅速增大,传输至ET二次侧无功功率大部分流向VSC,少部分由ET损耗。VSC吸收无功功率迅速增大,由式(33)可知 大幅增大,无功功率关系为
大幅增大,无功功率关系为
 (38)
(38)
式中, 为故障期间主电路向ET二次侧传输的无功功率;
为故障期间主电路向ET二次侧传输的无功功率; 为ET无功功率损耗。根据式(35)可知,增大会引起VSC交流母线处暂态过电压。
为ET无功功率损耗。根据式(35)可知,增大会引起VSC交流母线处暂态过电压。
工况2下,如图7a、图7b所示,UL、US三相电压变为大幅下降,但不为0。此时ET二次电压为
 (39)
(39)
随着IET大幅增大,传输至VSC交流母线的无功功率增多,造成大幅增大,引发过电压。
相比于正常工况,网侧故障下换流器交流母线过电压主要由交流母线处无功功率变化量∆Q造成,所以令∆Q接近0可抑制过电压。本文基于VSC交流母线处无功功率变化量∆Q与电压U的关系,提出一种结合无功自适应调节和改进LADRC策略抑制过电压的方法,具体包括基于系统功率与电压特性进行自适应无功调控(Adaptive Reactive Power Control, ARPC),设计系统正常运行与过电压抑制策略的切换阈值;采用A-LADRC提升系统响应速度与效果。
故障期间,过电压出现,VSC及滤波器消耗无功功率增加,通过直接调节VSC无功功率限制VSC交流母线处无功功率,实现对过电压的抑制。详细推导如下。
过电压期间,对VSC无功功率进行控制,可以设置其无功功率参考值Qv_ref为
 (40)
(40)
式中,QN为系统正常运行下由式(28)得到的无功功率。故障后若VSC无功功率 可以跟随期望值Qv_ref变化,则
可以跟随期望值Qv_ref变化,则 、
、 相应跟随其变化。此时,VSC交流母线电压为
相应跟随其变化。此时,VSC交流母线电压为
 (41)
(41)
将式(41)代入式(40)得到VSC无功功率参考值为
 (42)
(42)
由式(42)可知,在过电压期间,根据主电路向ET二次侧传输的无功功率、ET无功功率损耗、正常运行下由式(28)得到的无功功率QN、电压UN与滤波器消耗无功功率QlN可计算出VSC无功功率参考值,该参考值在控制过程中可以跟随VSC交流母线电压变化而变化。
同时,VSC无功调节能力换流器受到容量限制,为保证无功功率参考信号有效需要限制其在合理范围内,限定幅值 为
为
 (43)
(43)
式中,Sv为换流器容量;Pv为换流器输出有功功率。
系统运行时,可能存在小干扰导致的正常电压波动,同时,VSC作为电力电子设备,其内部器件IGBT等耐压能力有限,因此需要设定保护阈值。设置1.1(pu)的故障保护阈值可以有效避免小幅度的电压波动误触发保护,也能够抑制故障产生的过电压,避免设备损坏。考虑故障检测与控制策略切换存在一定延时,为留有一定裕度,设置保护阈值为1.08(pu)。在故障消除后,系统电压会逐渐恢复到正常水平,设置1.03(pu)作为退出保护阈值,既可以确保系统在电压恢复初期保持稳定,也能尽快切换为正常运行,避免影响系统的运行状态。
故障过电压运行期间,启动抑制策略后设定执行至故障消失,避免因电压恢复至正常水平后误判退出抑制策略;在故障消失后的恢复过程中,根据阈值1.03(pu)判断是否切换正常运行控制,以此实现控制策略有效运行。
本文提出的A-LADRC方法主要包括线性状态误差反馈(Linear State Error Feedback, LSEF)控制、线性扩张状态观测器(Linear Extended State Observer, LESO)与带宽自适应调节三部分,其结构及原理如图8所示。
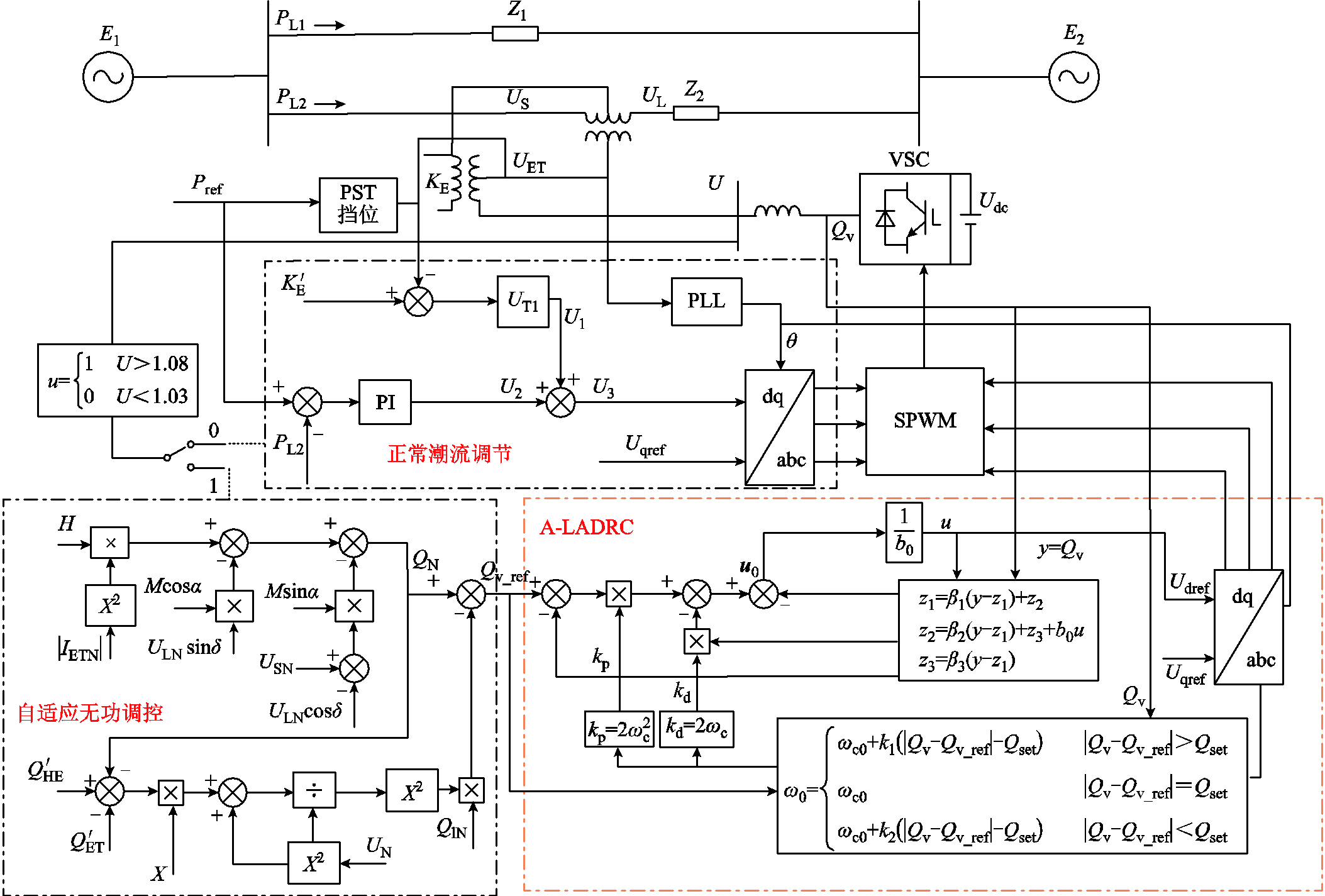
图8 结合无功自适应调节和改进LADRC策略抑制过电压方法
Fig.8 The overvoltage suppression method is combined with reactive power adaptive regulation and improved LADRC strategy
在过电压抑制初始阶段采用PI调节是基于误差而消除误差的控制方式,存在一定的滞后性,导致抑制速度慢,出现短时过电压现象。为满足实际工程的需求,避免短时过电压,引入LADRC控制,提升响应速度及抗扰动能力。而仅靠给定控制器带宽wc存在调节过程中响应速度过快或过慢问题,本文提出A-LADRC的控制策略可以根据VSC无功功率实际出力与其参考值的差值进行带宽调节,使系统调节速度相对稳定,电压波动幅度减小,快速精确地抑制过电压。
当系统出现故障过电压时,系统总等效阻抗与内部传输功率随着故障工况的变化而变化。为避免阻抗等参数误差造成补偿误差,在不同运行工况过电压抑制过程中直接采集系统无功功率的变化,与无功功率目标值进行比较,调整控制输入,同时,根据比较后的差值调整带宽参数,从而实现对无功功率的精确跟踪和控制。
图8中,u为系统输入量,b0为增益系数,y为输出,z为观测器的状态变量,z1、z2、z3为LESO的状态变量,A、B、C为系数矩阵,L为观测器误差反馈增益矩阵,u0为线性状态误差反馈控制环输出控制量,kp、kd为混合潮流控制器的增益系数,R为设定的系统输入值。则相应二阶系统为
 (44)
(44)
线性状态观测器为
 (45)
(45)
线性状态误差反馈控制环为
 (46)
(46)
 (47)
(47)
式中,a1、a0为控制参数;uc=[u y]T;yc为输出。参考极点配置法简化LESO与LSEF设计,将系统控制器闭环极点配置于-wc,观测器闭环极点配置于-wo,相应观测器增益矩阵与kp、kd为
 (48)
(48)
 (49)
(49)
自适应调节混合潮流控制器的带宽以控制响应速度,调节过程包括:实时采集VSC输出无功功率与参考值之间的差值;与功率设定值比较以调节系统带宽。由于抑制过电压时无功功率参考值对应一个范围区间,可以定义设定功率值为Qset,使
 (50)
(50)
式中,k1、k2为调节系数;Qv为VSC输出无功功率;Qv_ref为无功功率参考值;wc0为初始带宽;令Qset= 0.4 Mvar。
带宽参数直接影响系统的动态响应速度和稳定性。为满足系统稳定运行、动态响应速度等性能要求,需要对带宽参数进行约束。
为保证系统稳定运行,需要考虑阻尼比与自然频率对系统的影响,取合适阻尼比与自然频率下,可以设置最小带宽为14.14 rad/s;为确保系统在故障发生后快速响应,在系统动态响应速度约束下,最小带宽为20 rad/s;带宽过高可能导致系统振荡,影响系统稳定,为确保系统在最快响应时不会出现振荡,需要将带宽限定在临界失稳值以下,系统对应带宽上限可以设置为1 200 rad/s。
因此,综合考虑系统稳定运行、动态响应速度等约束后,带宽参数wc的可行域为
 (51)
(51)
当VSC输出无功功率与设定功率值之间差值高于设定值时,带宽增加,响应速度加快;当差值小于设定值时,带宽减小,避免振荡。一般观测器带宽wo取4~10倍或2~5倍的wc。
考虑k1、k2的选取将影响控制器带宽参数调节,进而影响系统控制性能,因此需对其进行合理取值。
结合带宽参数可行域分析,为满足系统运行稳定性与响应速度等要求,k1、k2的范围分别为
 (52)
(52)
 (53)
(53)
故障过电压抑制期间,在取值范围内为满足系统响应速度、稳定性、控制精度等方面要求,取k1=5、k2=3,以实现最佳的控制效果。
为实现内环和外环响应时间的有效匹配,使内环快速响应,而外环缓慢调节,设计方案如下。
系统外环在采集系统相关功率信号后,使用低通滤波器对所采集无功功率信号进行滤波,可以降低功率信号的变化率并去除干扰,但滤波器的引入也在一定程度上减缓了功率变化,造成一定延时,导致响应时间较长,但不影响系统控制逻辑。为保证系统整体响应速度,在考虑延时情况下确保响应时间小于50 ms。
系统内环LADRC控制的响应性能只与控制器带宽参数有关,带宽越高,系统的响应能力越强,响应时间越短。为保证内环能够快速动态响应输入的参考值,外环能够平稳调节,实现内外环的时间尺度匹配,控制内环响应时间在10 ms以内,需要对内环设置较高的初始带宽,当wc0=500 rad/s时,过电压抑制效果最优。
综上所述,所提结合无功自适应调节和改进LADRC策略抑制过电压方法如图8所示。正常工况下,HPFC进行潮流控制;当故障引起过电压时,控制切换,投入VSC无功功率补偿控制,利用A-LADRC对故障初始阶段进行抑制,调节系统响应速度,最终有效抑制过电压。
为验证所提方法的有效性,在给定参数下,利用RT-Lab(OP5600)搭建实时仿真平台进行验证,实验平台主要由RT-Lab(OP5600)实时仿真器、上位机、录波仪与实际控制器组成,如图9所示。在Simulink仿真系统中搭建HPFC模型,将仿真由上位机拷入RT-Lab实时仿真器,本文所提出的过电压抑制策略部署在实际控制器中,实际控制器产生的PWM脉冲传送至RT-Lab的脉冲输入端口,完成数据处理后,通过录波仪录制实验波形。系统及控制参数见表1。

图9 RT-Lab实时仿真平台
Fig.9 RT-Lab real-time simulation platform
表1 HPFC参数
Tab.1 The HPFC parameters
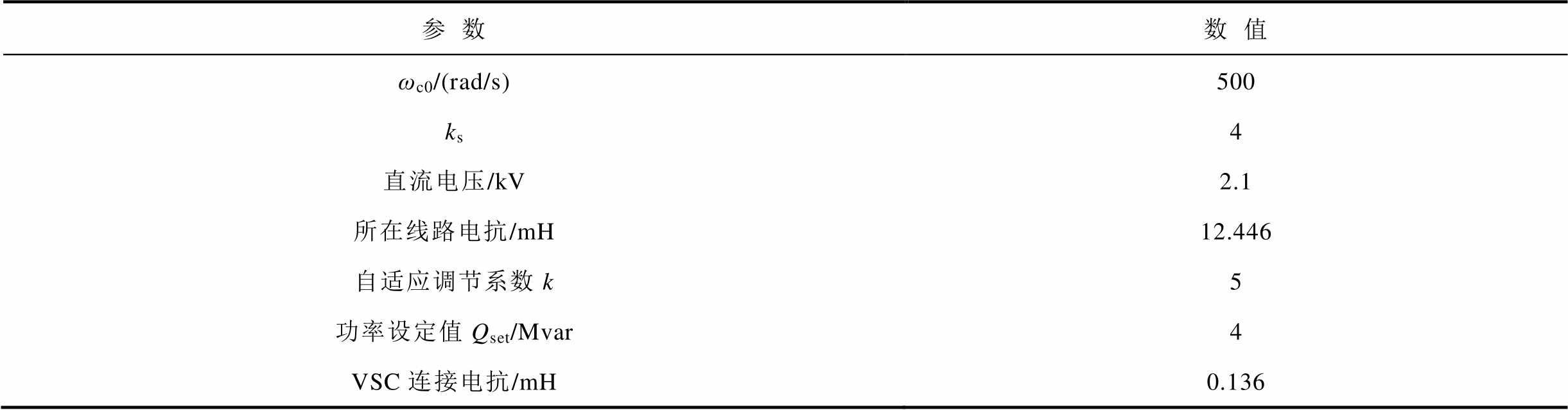
参数数值 ωc0/(rad/s)500 ks4 直流电压/kV2.1 所在线路电抗/mH12.446 自适应调节系数k5 功率设定值Qset/Mvar4 VSC连接电抗/mH0.136
为验证ET二次侧传输无功功率额定值计算的正确性,对不同目标潮流下无功功率Q进行验证,如图10所示。1.5 s时VSC与PST协同调节线路潮流,结果与式(28)及图5基本一致。
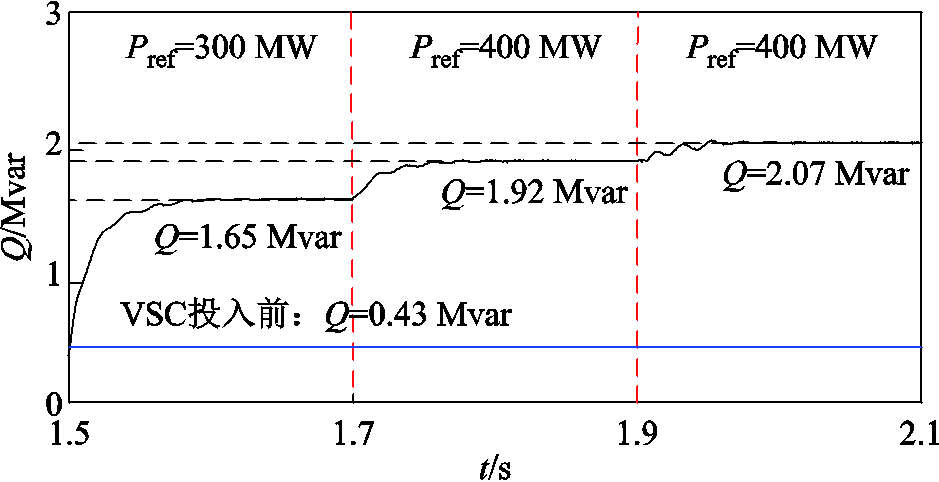
图10 不同目标潮流下无功功率Q
Fig.10 Reactive power Q under different target power flows
在给定系统参数的前提下,分别验证故障工况1、2下策略的有效性,故障时间为2~3 s。为直观、清楚地呈现所提抑制过电压策略的效果,通过录波仪录制功能,将数据导出并通过绘图软件将不同实验波形绘制在同一坐标系下。系统出现故障时,VSC交流母线出现过电压,当电压超过阈值,启动ARPC策略,此时VSC消耗无功功率将跟随VSC无功功率参考值变化,相应地出现电压波动。滤波电感消耗无功功率整体降低且小幅波动,对应VSC无功功率参考值也随之调整,直至最终无功功率稳定,实现过电压抑制。工况1、2对应参考值Qv_ref如图11a、图11b所示。
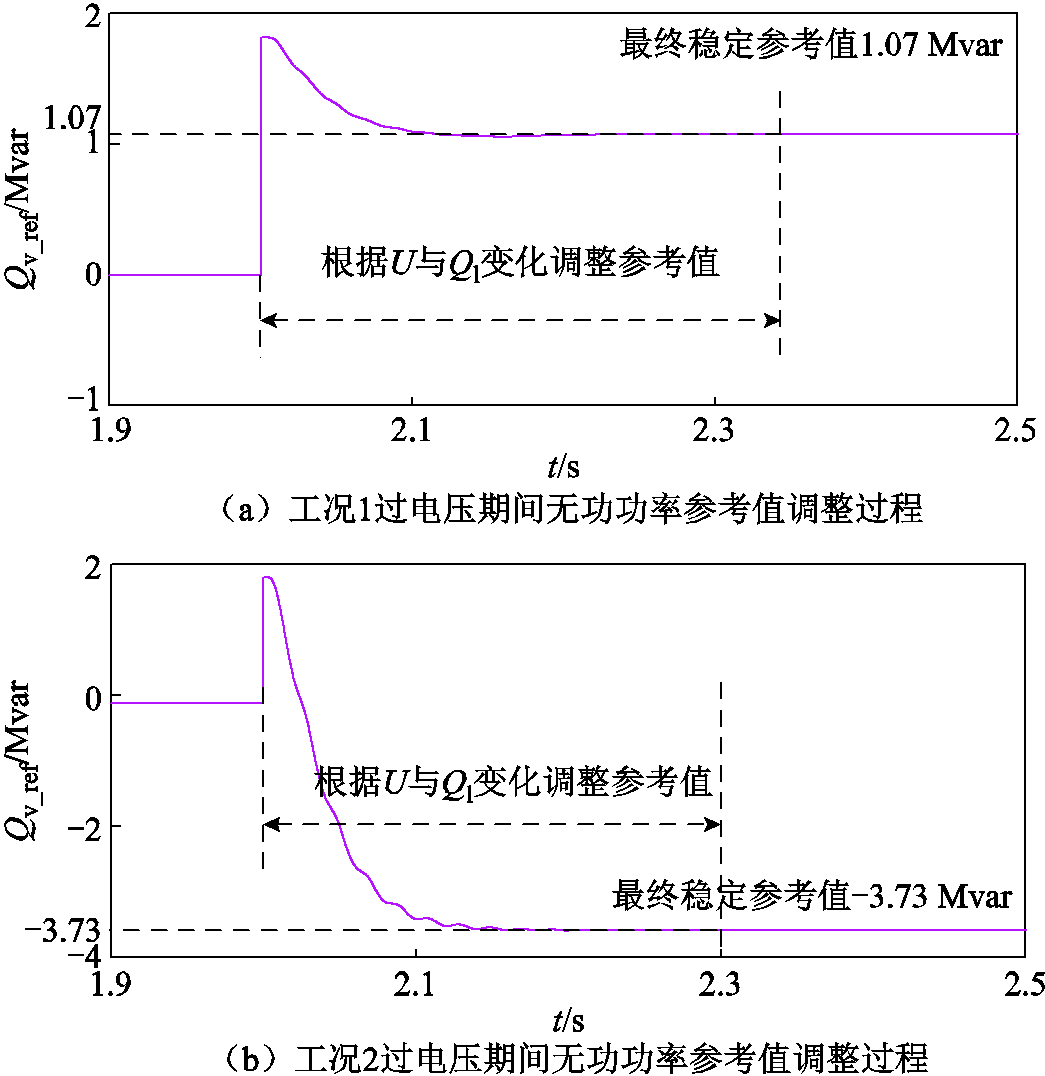
图11 工况1、2下VSC无功功率参考值调整过程
Fig.11 VSC reactive power reference value adjustment process under working conditions 1 and 2
为了准确地反映VSC在系统中的动态行为,在建模时考虑电磁暂态时间尺度。通过给定VSC无功功率阶跃信号,得到详细的电磁暂态响应曲线如图12所示,展示VSC无功功率在电磁暂态过程中的响应时间尺度。对VSC模型的电磁暂态响应离线仿真与RT-Lab实时仿真结果进行了对比,设定离线仿真步长为5 ms,而RT-Lab实时仿真因设备计算能力限制可以将仿真步长设置为100 ms。对比结果显示,两种仿真下无功功率响应谐波大小存在区别,但响应速度及变化趋势具有高度一致性。这充分证明了本文所建VSC模型及其电磁暂态响应动态在RT-Lab实时仿真下仍具有准确性和可靠性。
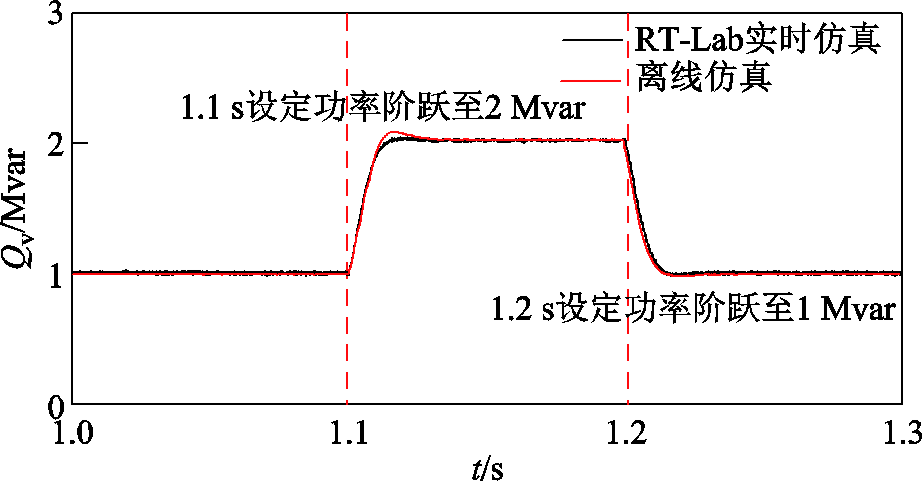
图12 VSC模型电磁暂态响应时间尺度
Fig.12 Time scale of electromagnetic transient response of VSC model
采用ARPC策略后,在工况1与工况2下将PI调节与A-LADRC根据参考值控制VSC无功功率效果进行对比,具体波形如图13、图14所示。从图中可以看出,ARPC+PI控制下输出响应较慢,且突发故障时,过电压抑制初始阶段因时滞导致VSC无功功率反复波动,整体达到稳定时间较长。而基于A-LADRC的ARPC策略下,VSC无功功率波动范围明显减小,系统响应速度明显变快。基于ARPC+PI控制时,工况1与工况2下系统达到稳定的时间分别为2.33 s与2.3 s,而基于ARPC+A-LADRC控制下两种工况达到稳定的时间分别为2.11 s与2.12 s。
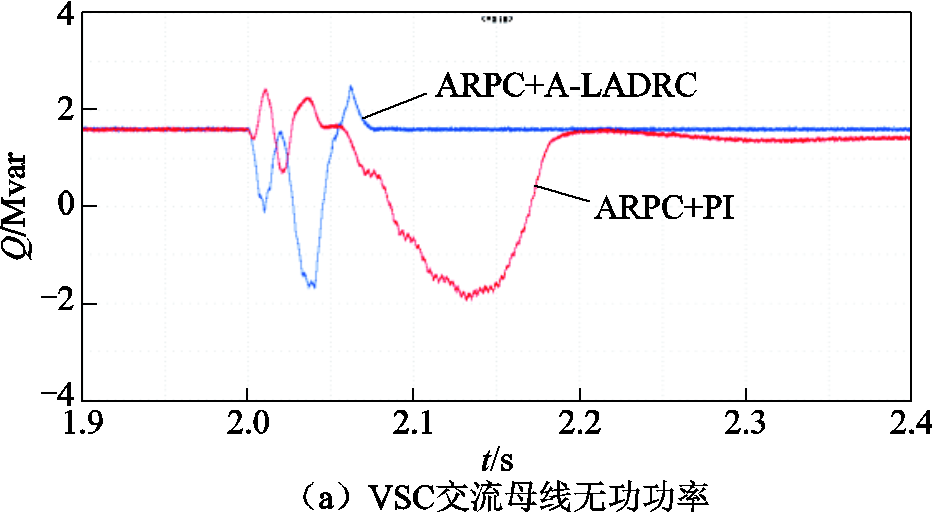
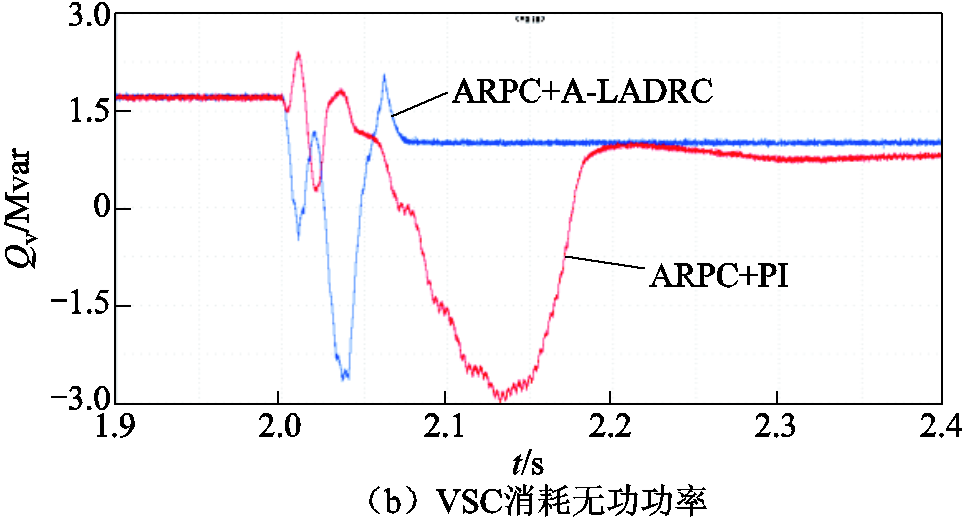
图13 工况1下两种控制方式效果对比
Fig.13 Comparison of two control methods under working condition 1
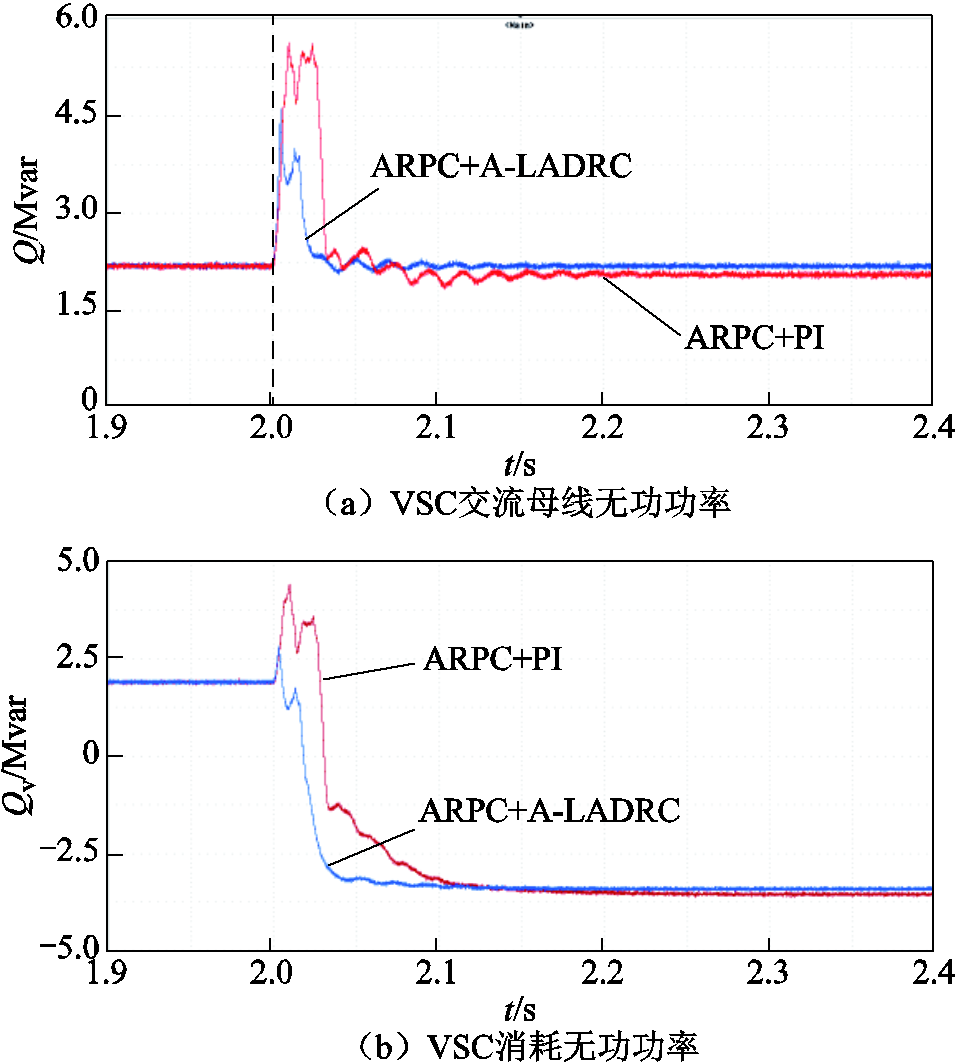
图14 工况2下两种控制方式效果对比
Fig.14 Comparison of two control methods under working condition 2
在本文所提策略下,故障消失后的恢复过程中,电压低于1.03(pu),系统切换为正常运行模式。以工况1为例,此时,系统正常调节线路功率潮流,内部换流器交流母线无功功率动态变化如图15所示。
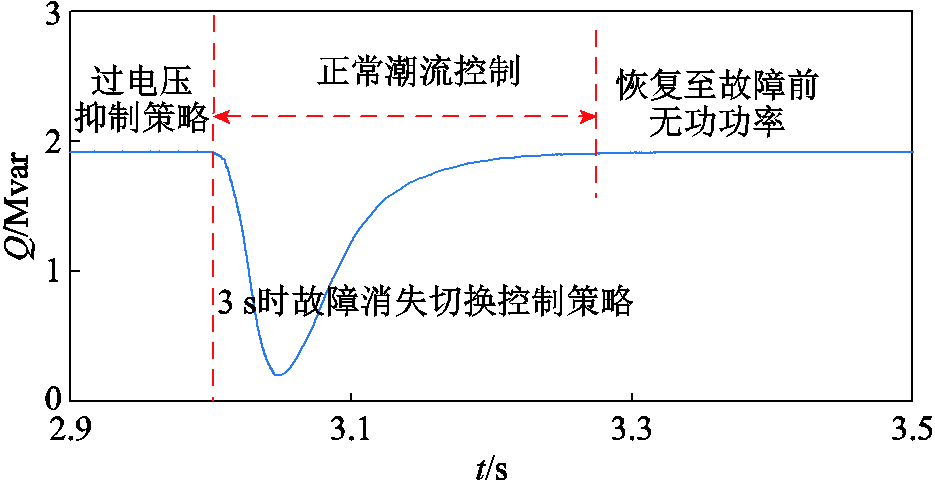
图15 工况1切换正常运行控制无功动态变化
Fig.15 Operating condition 1 Switch normal operation control reactive power dynamic change
图16、图17为两种控制下不同工况过电压抑制效果。从波形数据可知,当系统采用ARPC+PI时,过电压抑制初始阶段因时滞导致严重短时过电压,且系统过电压抑制时间较长。采用ARPC+A-LADRC时,削弱了过电压抑制初始阶段的短时过电压,整个抑制期间电压波动幅度有限,且抑制速度更快,实现了全过程过电压抑制,验证了本文所提过电压抑制策略的有效性。
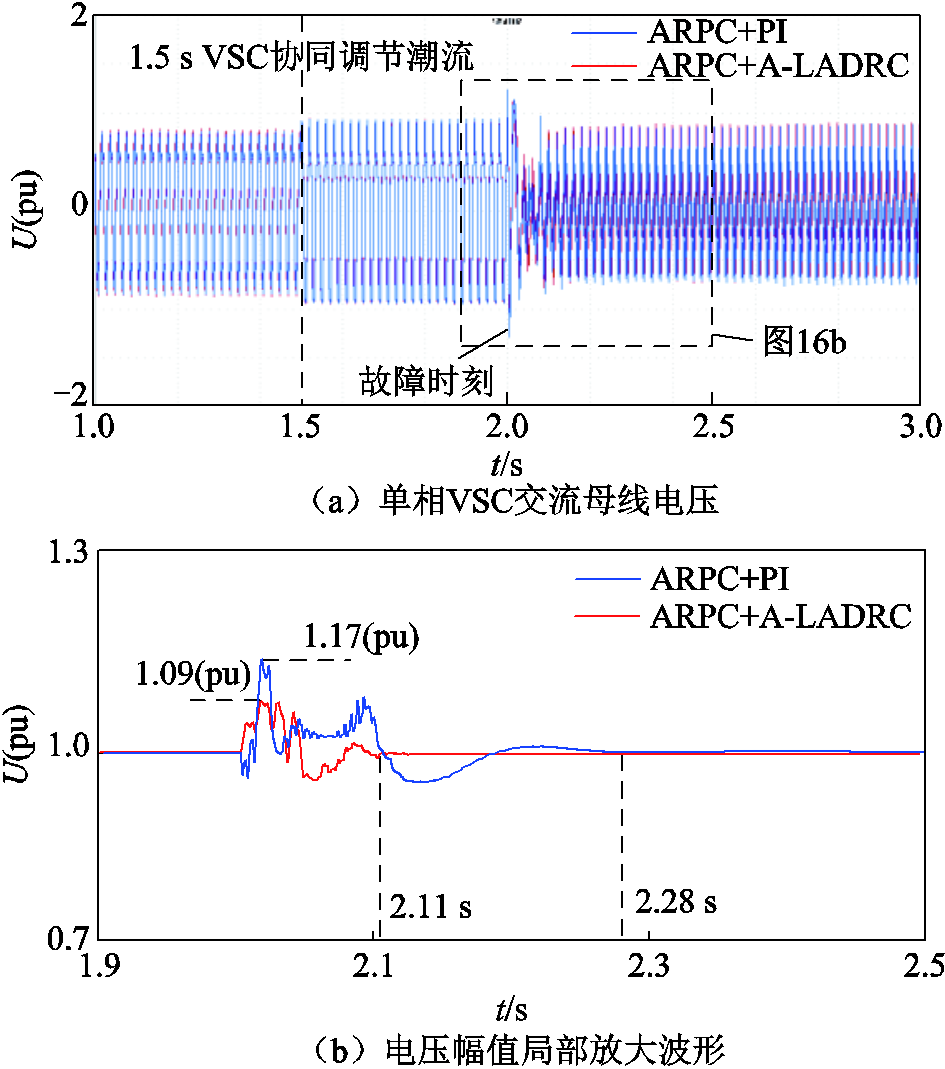
图16 工况1不同控制下过电压抑制效果对比
Fig.16 Working condition 1 comparison of overvoltage suppression effect under different control
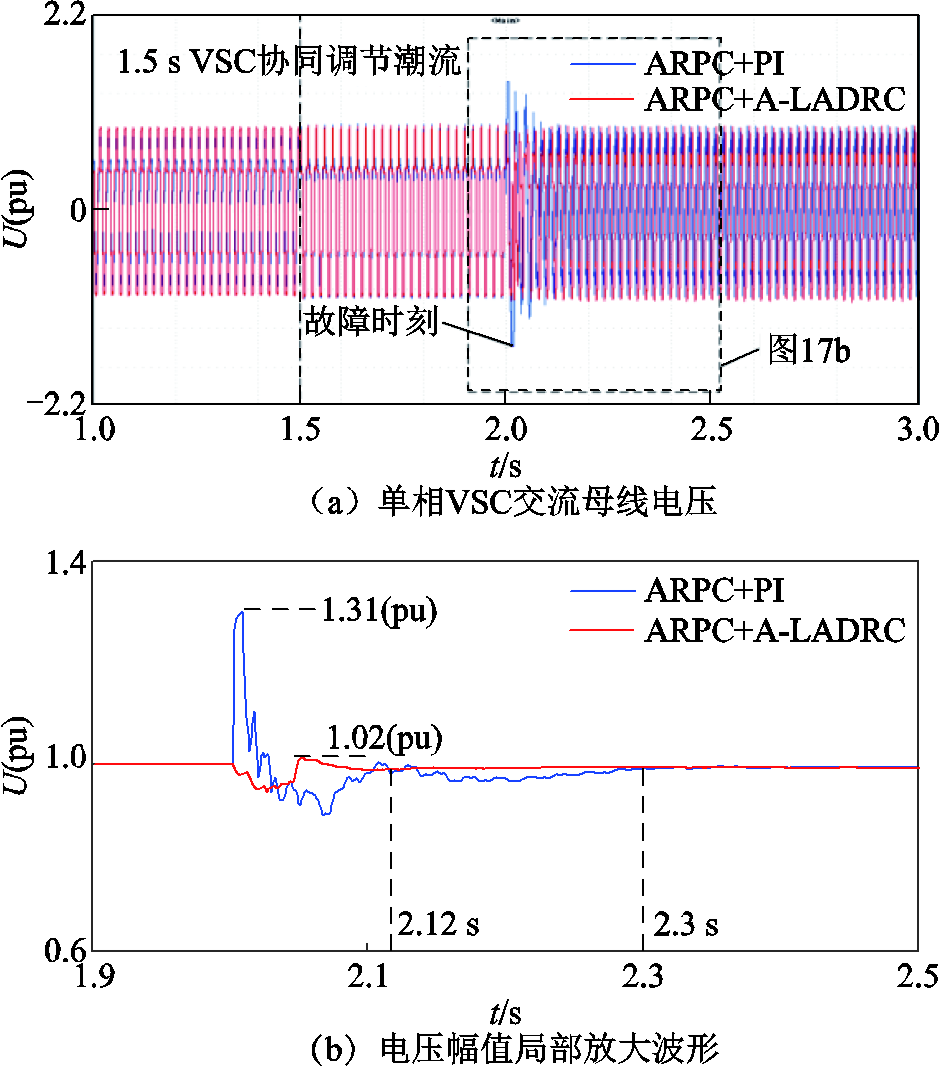
图17 工况2不同控制下过电压抑制效果对比
Fig.17 Working condition 2 comparison of overvoltage suppression effect under different control
基于实验数据,进一步对比本文所提策略两种调节方式下的过电压抑制效果,VSC交流母线处过电压抑制时间与过电压最大值见表2。
表2 A-LADRC与PI调节效果对比
Tab.2 Comparison of A-LADRC and PI adjustment effect

控制方式工况抑制时间/sU峰值(pu) PI10.281.17 20.31.31 A-LADRC10.111.09 20.121.02
综上所述,过电压抑制初始阶段,ARPC+PI调节因滞后效应,初始过电压抑制效果不如ARPC+A-LADRC明显。且PI调节对控制参数要求较高,采用A-LADRC后系统自适应调节降低了参数设计难度,可以有效地提升系统响应速度,VSC交流母线过电压抑制时间更短,过电压峰值更低。所以,ARPC+A-LADRC的抑制策略在解决VSC交流母线过电压问题时具有更优的效果。
为实现故障场景下HPFC过电压全过程抑制,本文基于HPFC过电压机理分析,提出一种结合无功功率自适应调节和带宽参数自适应调节的线性自抗扰策略以抑制混合潮流控制器全过程过电压控制的方法,并通过实验验证了本文所提过电压抑制策略的有效性和优越性。得出结论如下:
1)根据HPFC内部潮流方程与无功-电压耦合关系,提出一种自适应无功调控策略,从实验结果来看,所提策略可以抑制不同故障场景下引起的过电压。
2)针对抑制初始阶段的短时过电压问题,通过分析线性自抗扰控制中核心带宽参数与系统输出响应之间的关系,设计一种控制器带宽参数自适应调节的线性自抗扰控制(A-LADRC)方法,实验结果表明,过电压抑制时间较PI调节缩短50%以上,抑制效果更明显。
3)通过RT-Lab实时仿真机和实际控制器进行实时仿真,验证了所提策略抑制不同故障引起过电压的有效性及初始阶段抑制效果的优越性,具有较好的实际工程应用价值。
参考文献
[1] 杨用春, 杜翔宇, 杨鹏, 等. 混合潮流控制器阻抗特性分析及控制策略研究[J]. 电工技术学报, 2024, 39(21): 6720-6733. Yang Yongchun, Du Xiangyu, Yang Peng, et al. Impedance characteristic analysis and control strategy research of hybrid power flow controller[J]. Transactions of China Electrotechnical Society, 2024, 39(21): 6720-6733.
[2] 韩旭东. 混合潮流控制器的参数设计与控制策略研究[D]. 北京: 华北电力大学, 2023. Han Xudong. Parameter design and control strategy research of hybrid power flow controller[D]. Beijing: North China Electric Power University, 2023.
[3] 陈柏超, 费雯丽, 田翠华, 等. 新型混合式统一潮流控制器及其调节特性分析[J]. 高电压技术, 2017, 43(10): 3256-3264. Chen Baichao, Fei Wenli, Tian Cuihua, et al. Novel hybrid unified power flow controller and regulation performance analysis[J]. High Voltage Engineering, 2017, 43(10): 3256-3264.
[4] 杨用春, 杜翔宇, 李旭东, 等. 基于级联H桥的混合潮流控制器及控制策略研究[J]. 华北电力大学学报(自然科学版), 2025, 52(4): 44-52. Yang Yongchun, Du Xiangyu, Li Xudong, et al. Research on hybrid power flow controller and control strategy based on cascade H-bridge[J]. Transactions of China Electrotechnical Society, 2025, 52(4): 44-52.
[5] 陈勇, 曹伟炜, 柏彬, 等. MMC-UPFC单相接地故障下运行特性分析及整体保护策略设计[J]. 电工技术学报, 2019, 34(3): 599-610. Chen Yong, Cao Weiwei, Bai Bin, et al. Operation characteristics analysis under single-phase grounding fault and overall protection scheme design of MMC-UPFC device[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 599-610.
[6] 张晓宇, 顾乔根, 文继锋, 等. 统一潮流控制器系统串联变压器保护设计[J]. 电力系统自动化, 2017, 41(17): 72-77, 112. Zhang Xiaoyu, Gu Qiaogen, Wen Jifeng, et al. Series transformer protection design in unified power flow controller system[J]. Automation of Electric Power Systems, 2017, 41(17): 72-77, 112.
[7] 崔福博, 郭剑波, 荆平, 等. MMC-UPFC接地设计及其站内故障特性分析[J]. 中国电机工程学报, 2015, 35(7): 1628-1636. Cui Fubo, Guo Jianbo, Jing Ping, et al. The grounding design and internal fault characteristic of MMC-UPFC[J]. Proceedings of the CSEE, 2015, 35(7): 1628-1636.
[8] 孔志达, 宁联辉, 黄阳, 等. 陆上风电分频输电系统暂态过电压分析及抑制[J]. 电网技术, 2025, 49(9): 3555-3565. Kong Zhida, Ning Lian-Hui, Huang Yang, et al. Analysis and suppression of transient overvoltage in frequency division transmission system of onshore wind power[J]. Power Grid Technology, 2025, 49(9): 3555-3565.
[9] 范越, 陈颖, 霍超, 等. 新能源场站过电压受变压器磁饱和影响机理分析及修正方法[J]. 电力系统自动化, 2024, 48(5): 99-106. Fan Yue, Chen Ying, Huo Chao, et al. Mechanism analysis and correction method for overvoltage of renewable energy station affected by transformer magnetic saturation[J]. Automation of Electric Power Systems, 2024, 48(5): 99-106.
[10] 颜湘武, 郭燕, 彭维锋, 等. 基于旋转移相变压器的电压源型无功补偿器及其控制策略[J]. 电工技术学报, 2023, 38(16): 4448-4464. Yan Xiangwu, Guo Yan, Peng Weifeng, et al. Voltage source var compensator based on rotary phase shifting transformer and its control strategy[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4448-4464.
[11] 王烁哲, 韩民晓, 范溢文, 等. 基于改进自律分散控制的换流器型电网频率/电压调整与功率分配策略[J]. 中国电机工程学报, 2025, 45(13): 4980-4992. Wang Shuozhe, Han Minxiao, Fan Yiwen, et al. Frequency/voltage regulation and power distribution strategy of converter based on improved autonomous decentralized control[J]. Proceedings of the CSEE, 2025, 45(13): 4980-4992.
[12] 田安民, 孙光淼, 卢文兵, 等. 大容量变流器中IGBT关断过电压抑制技术研究[J]. 电力电子技术, 2023, 57(10): 13-16, 38. Tian Anmin, Sun Guangmiao, Lu Wenbing, et al. Research on IGBT turn-off overvoltage suppression technology in large-capacity converter[J]. Power Electronics, 2023, 57(10): 13-16, 38.
[13] 秦博宇, 张哲, 高鑫, 等. 响应驱动的直流送端暂态过电压评估及抑制策略[J]. 电力系统自动化, 2025, 49(7): 148-157. Qin Boyu, Zhang Zhe, Gao Xin, et al. Evaluation and suppression strategy of transient overvoltage at DC end of response drive[J]. Automation of Electric Power Systems, 2025, 49(7): 148-157.
[14] 曹斌, 郑子萱, 刘鸿清, 等. 基于无功电流补偿的直驱风机故障后过电压抑制策略[J]. 电力系统自动化, 2025, 49(9): 166-174.Cao Bin, Zheng Zixuan, Liu Hongqing, et al. Overvoltage suppression strategy of direct drive fan after fault based on reactive current compensation[J]. Automation of Electric Power Systems, 2025, 49(9): 166-174.
[15] 赵东君, 郭春义, 叶全, 等. 抑制风电场经LCC-HVDC并网系统交流过电压的无功功率分散协同控制方法[J]. 电力自动化设备, 2024, 44(1): 88-94. Zhao Dongjun, Guo Chunyi, Ye Quan, et al. Reactive power decentralized cooperative control method for restraining AC overvoltage of wind farm via LCC-HVDC grid-connected system[J]. Electric Power Automation Equipment, 2024, 44(1): 88-94.
[16] 董芷函, 王国腾, 徐政, 等. 白鹤滩—江苏特高压混合级联直流系统运行特性分析方法[J]. 电力自动化设备, 2022, 42(6): 118-125. Dong Zhihan, Wang Guoteng, Xu Zheng, et al. Operation characteristic analysis method of Baihetan-Jiangsu hybrid cascaded UHVDC system[J]. Electric Power Automation Equipment, 2022, 42(6): 118-125.
[17] 丁汀. 基于MMC的统一潮流控制器的电磁暂态特性研究[D]. 武汉: 华中科技大学, 2019. Ding Ting. Research on the electromagnetic transient characteristics of modular multilevel based unified power flow controller[D]. Wuhan: Huazhong University of Science and Technology, 2019.
[18] 陈彤阳. 新型混合潮流控制装置拓扑及控制策略研究[D]. 北京: 华北电力大学, 2023. Chen Tongyang. Research on topology and control strategy of new hybrid power flow control device[D]. Beijing: North China Electric Power University, 2023.
[19] 高本锋, 王晓, 梁纪峰, 等. 混合型统一潮流控制器抑制风电次同步振荡控制策略[J]. 电力建设, 2021, 42(9): 53-64. Gao Benfeng, Wang Xiao, Liang Jifeng, et al. Control strategy of hybrid unified power flow controller to suppress wind power sub-synchronous oscillation[J]. Electric Power Construction, 2021, 42(9): 53-64.
[20] 高志强. 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 30(12): 1498-1510. Gao Zhiqiang. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498-1510.
[21] 李志华, 曾江, 黄骏翅, 等. 基于线性自抗扰控制的微网逆变器时-频电压控制策略[J]. 电力系统自动化, 2020, 44(10): 145-154. Li Zhihua, Zeng Jiang, Huang Junchi, et al. Time-frequency voltage control strategy of microgrid inverter based on linear active disturbance rejection control[J]. Automation of Electric Power Systems, 2020, 44(10): 145-154.
[22] Tan Wen, Fu Caifen. Linear active disturbance-rejection control: analysis and tuning via IMC[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2350-2359.
[23] Zhou Xuesong, Zhong Weibao, Ma Youjie, et al. Control strategy research of D-STATCOM using active disturbance rejection control based on total disturbance error compensation[J]. IEEE Access, 2021, 9: 50138-50150.
[24] 王旭明, 罗成, 熊志, 等. 基于线性自抗扰的无刷双馈电机功率解耦控制策略研究[J]. 电气传动, 2024, 54(8): 27-35. Wang Xuming, Luo Cheng, Xiong Zhi, et al. Linear active disturbance rejection power decoupling control method for BDFM[J]. Electric Drive, 2024, 54(8): 27-35.
[25] 孟建辉, 孙亚鑫, 张自力, 等. 带宽参数自适应调整的压缩空气储能线性自抗扰平滑并网控制策略[J/OL]. 电源学报, 1-17[2025-04-07]. http://kns.cnki. net/kcms/detail/12.1420.tm.20240725.0916.002.html. Meng Jianhui, Sun Yaxin, Zhang Zili, et al. Linear active disturbance rejection smooth grid-connection control strategy for compressed air energy storage with adaptive adjustment of bandwidth parameters [J/OL]. Journal of Power Sources, 1-17[2025-04-07]. http://kns.cnki.net/kcms/detail/12.1420.tm.20240725.0916.002.html.
Abstract Hybrid power flow controller (HPFC) is an advanced power system device that has garnered significant attention for its potential applications in modern power systems, primarily due to its capability to achieve continuous and precise power flow regulation. However, under the fault scenarios, the HPFC may experience overvoltage issues, which pose a threat to the safe operation of the HPFC device and may compromise the stability of the entire power system. To address this critical challenge, this paper proposes a novel control strategy that integrates linear active disturbance rejection control (LADRC) with adaptive reactive power regulation and adaptive bandwidth parameter regulation, aiming to effectively suppress overvoltage throughout the entire process.
The study begins with an in-depth analysis of the topology and working principle of the HPFC, focusing on the internal power characteristics of the system and the mechanism of overvoltage generation. By examining the power flow relationships within the HPFC system and the coupling between reactive power and voltage, an adaptive reactive power control (ARPC) strategy is developed. This strategy dynamically regulates reactive power during system faults to effectively mitigate overvoltage. Additionally, to address the potential short-term overvoltage issue at the initial stage of overvoltage suppression, linear active disturbance rejection control (LADRC) is introduced to enhance the dynamic response characteristics of the system. Traditional fixed-bandwidth LADRC, however, has limitations in suppressing overvoltage caused by faults. Therefore, this paper further investigates the relationship between the bandwidth parameter of LADRC and its dynamic response characteristics. An improved LADRC method, termed adaptive LADRC (A-LADRC), is proposed. This method optimizes the bandwidth parameter in real-time based on the difference between the reactive power reference value and the actual output. By dynamically adjusting the controller bandwidth, the proposed method can rapidly suppress overvoltage while maintaining system stability, thereby achieving comprehensive overvoltage suppression. The integration of ARPC and A-LADRC enables coordinated control across all operational stages, from the onset of a fault to its recovery.
Finally, based on RT-LAB real-time simulator and actual controller, a controller level hardware-in-the-loop test platform was built to verify the overvoltage suppression strategy under different fault scenarios. The experiment compares and validates the ARPC combined PI control and the proposed A-LADRC strategy. The experimental results show that the inhibition time of ARPC combined with A-LADRC under different working conditions is shorter, which is 0.11 s and 0.12 s, and 0.28 s and 0.3 s under PI control, which is about 50% shorter than that under PI control. In the simulation experiment of fault overvoltage, the short-time overvoltage exists in the initial stage of fault under PI control, which can be effectively avoided by using the proposed A-LADRC. The peak value of overvoltage suppression under PI control is 1.17 and 1.31, and the peak value of overvoltage suppression using the proposed method is 1.09 and 1.02, which shows that the suppression effect is obviously better. The results show that the proposed method can effectively improve the speed of overvoltage suppression, reduce the peak value of overvoltage suppression, and realize the whole process of overvoltage suppression from the control level.
keywords:Hybrid power flow controller, adaptively adjustment, linear active disturbance rejection, overvoltage suppression
DOI: 10.19595/j.cnki.1000-6753.tces.242279
中图分类号:TM86
国网河北省电力有限公司科技项目资助(SGHEJY00SJJS2310140)。
收稿日期 2024-12-18
改稿日期 2025-01-19
孟建辉 男,1987年生,博士,高级工程师,研究方向为电力电子技术、新能源发电与电力系统。E-mail:mengjianhui2008@163.com
袁新成 男,2001年生,硕士研究生,研究方向为新能源并网控制技术。E-mail:18678570769@163.com(通信作者)
(编辑 赫 蕾)