图1 LOM的系统等效模型
Fig.1 System equivalent model of LOM
摘要 针对现有直线振荡电机(LOM)无位置传感器控制受直流分量影响严重,导致行程观测精度低、系统可靠性不高等问题,该文设计了一种基于高阶广义积分器(HOGI)的改进型无位置传感器活塞行程观测方法。首先,对比分析了纯积分器、低通滤波器及二阶广义积分器(SOGI)对直流分量的抑制效果,总结出不同滤波方法的局限性。其次,针对现有滤波方法无法完全消除直流分量,行程观测精度难以提升的问题,设计高性能HOGI代替传统纯积分器,利用HOGI的多重滤波特性完全消除直流分量的干扰,以提升观测器性能。此外,基于前向欧拉法设计了HOGI的离散化实现方法,具有计算简便、易实现等优点。最后,将传统SOGI与HOGI进行实验对比分析,验证了所提方法的有效性与优越性。
关键词:直线振荡电机 无位置传感器控制 高阶广义积分器 直流分量抑制 前向欧拉法
压缩机是制冷(热)系统的心脏,广泛应用于家用电器、军事装备等领域[1-2]。相较于传统旋转式压缩机,由直线振荡电机(Linear Oscillatory Machine, LOM)驱动的线性压缩机省去了中间转换机构,能够直接实现电能到直线往复机械能的转换,具有结构简单紧凑、效率高、体积小、活塞行程“自由可调”等优势[3-4]。然而,当活塞行程控制未达到预期值时,气体压缩量不够,会使得压缩机容积效率下降。此外,当活塞行程超过最大允许范围时,活塞将撞击气缸壁,引发撞缸事故,损坏压缩机。因此,需对LOM实施活塞行程闭环控制,以保证线性压缩机高效可靠运行[5-6]。
一般商用线性压缩机中LOM与气缸高度一体化,采用机械位置传感器实时检测行程信号的方法存在安装维护困难、系统体积增大等问题。相比之下,采用无位置传感器控制是提升LOM活塞行程控制性能的最佳手段[7-8]。目前,LOM无位置传感器控制常用的行程观测方法以反电动势积分法和滑模观测器为主,其核心思想都是根据电压方程观测电机反电动势信息,然后利用反电动势与速度成正比的关系获得速度信号,最后对速度信号积分获得活塞行程信号[9-11]。然而,在实验过程中,不论采用何种观测方法,其传感器采集到的电压、电流信号中都不可避免地含有一定的直流分量,导致最终观测到的反电动势信号中也将含有直流分量。当采用纯积分器时,直流分量将不断累积,最终出现积分饱和现象,使得无位置传感器控制无法实现[12-13]。
针对上述无位置传感器控制存在的纯积分饱和问题,学者们尝试采用高性能滤波器或增设直流补偿等方式获取较为准确的行程信号。文献[14]在纯积分器前加入高通滤波器先将反电动势中的直流分量滤除,再通过纯积分器得到行程信号,该方法虽然在一定程度上能够解决纯积分饱和问题,但高通滤波器串联纯积分器可等效为一个低通滤波器(Low Pass Filter, LPF),LPF的使用会造成滤波输出信号的幅值衰减和相位偏移。为此需要增加补偿环节,而这种方法无疑增加了算法计算量,且受电机高频振荡运动的影响,补偿无法完全实现。文献[15]进一步采用自适应全通滤波器替代前述纯积分环节,实现了对幅值衰减和相位偏移的精确补偿,但该方法需要给定自适应全通滤波器的运行谐振频率,当给定频率偏离运行谐振频率时,其估计效果将会出现较大偏差。
二阶广义积分器(Second Order Generalized Integrator, SOGI)是一种常用的高性能滤波器,在旋转电机中常被用于磁链观测或对转子位置进行估计[16-18],东南大学余海涛等率先将SOGI引入到LOM中,并对系统谐振频率进行了跟踪控制[19-20]。受该研究启发,有相关学者将SOGI引入到反电动势积分和滑模观测器中解决了纯积分器存在的积分饱和效应以及低通滤波器存在的幅值衰减和相位偏移等问题[21]。然而,将SOGI用于活塞行程观测时,仅能实现对直流分量的抑制,无法完全消除直流分量影响,当遭遇电源不稳定或由于其他原因导致电机中存在较大直流分量时,由SOGI滤波输出的行程观测信号也将出现较大偏移,影响观测性能。
针对前述LOM活塞行程观测存在的问题,本文提出一种基于高阶广义积分器(High Order Generalized Integrator, HOGI)的改进型直线振荡电机无位置传感器控制方法,彻底消除了直流偏置导致的活塞行程观测不准的问题,进一步提高了行程观测精度。本文创新点总结如下:①基于传统SOGI结构,设计了改进型HOGI,利用双SOGI多重反馈滤波特性,彻底消除了直流分量对行程观测结果的影响,进一步提高了观测精度;②采用复频域法分别对纯积分器、LPF、SOGI及HOGI进行分析,通过理论对比分析,证明了HOGI的优越性;③基于前向欧拉法对HOGI进行离散化和数字实现,具有计算简便、易实现等优点。最后,在一台120 W样机上对HOGI和SOGI两种滤波器进行了实验对比分析,验证了本文所提方法的有效性和先进性。
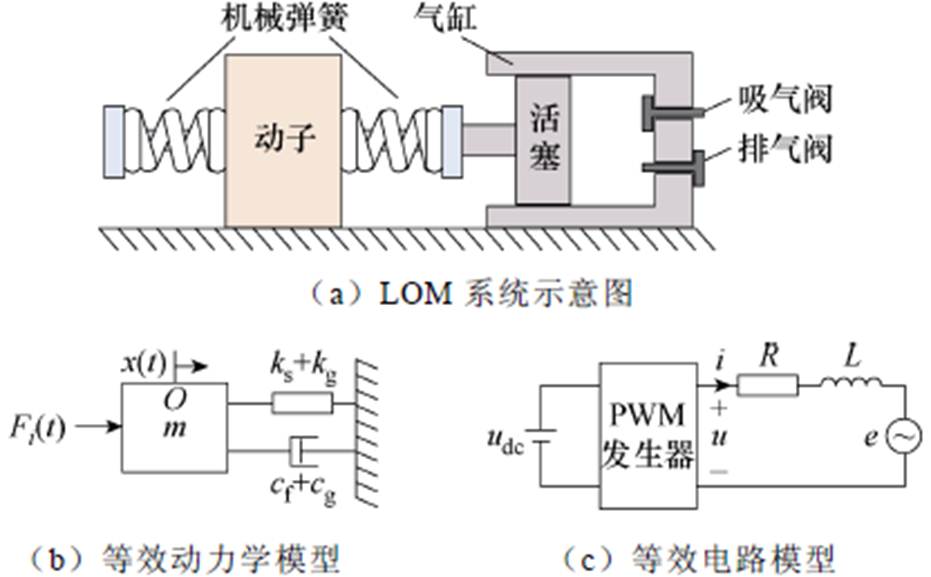
LOM利用受迫简谐振动原理实现直线往复运动,其结构如图1a所示。可以看到,系统中主要包含电机动子、双边机械弹簧、负载气缸等,其中电机动子与活塞相连,活塞行程即为动子行程。
图1 LOM的系统等效模型
Fig.1 System equivalent model of LOM
图1b为LOM的等效动力学模型,其表达式为
 (1)
(1)
式中,Fi为电磁推力,满足Fi=Kii,其中,Ki为推力系数;i为定子电流;左式第一项为运动件所受合外力,用于提供加速度,第二项为系统摩擦阻力,第三项为系统等效弹簧的总回复力; 为活塞行程;m为运动件质量;cf和cg分别为等效机械阻尼系数和等效气体阻尼系数;ks和kg分别为等效机械弹簧刚度和气体等效弹簧刚度。
为活塞行程;m为运动件质量;cf和cg分别为等效机械阻尼系数和等效气体阻尼系数;ks和kg分别为等效机械弹簧刚度和气体等效弹簧刚度。
图1c为LOM的等效电路模型,其电压方程可表示为
 (2)
(2)
式中,u为电机端电压;R为定子电阻;L为定子电感;e为电枢反电动势。LOM的反电动势和速度信号成正比,且两者比例系数本质上为推力系数[22],满足e=Kiv,其中,v为活塞速度。
下面推导基于传统反电动势积分的活塞行程观测方法,并分析该方法存在的缺陷。根据LOM的电压方程式(2),可得传统反电动势积分法的计算表达式为
 (3)
(3)
采用频域法将式(3)中的反电动势表示为
 (4)
(4)
式中, 、
、 、
、 分别为直流分量、基波分量和高频谐波的总和;
分别为直流分量、基波分量和高频谐波的总和; 、
、 和
和 分别为反电动势基波的幅值、角频率和初始相位;
分别为反电动势基波的幅值、角频率和初始相位; 、
、 和
和 分别为反电动势信号中对应高频谐波的幅值、角频率和初始相位。
分别为反电动势信号中对应高频谐波的幅值、角频率和初始相位。
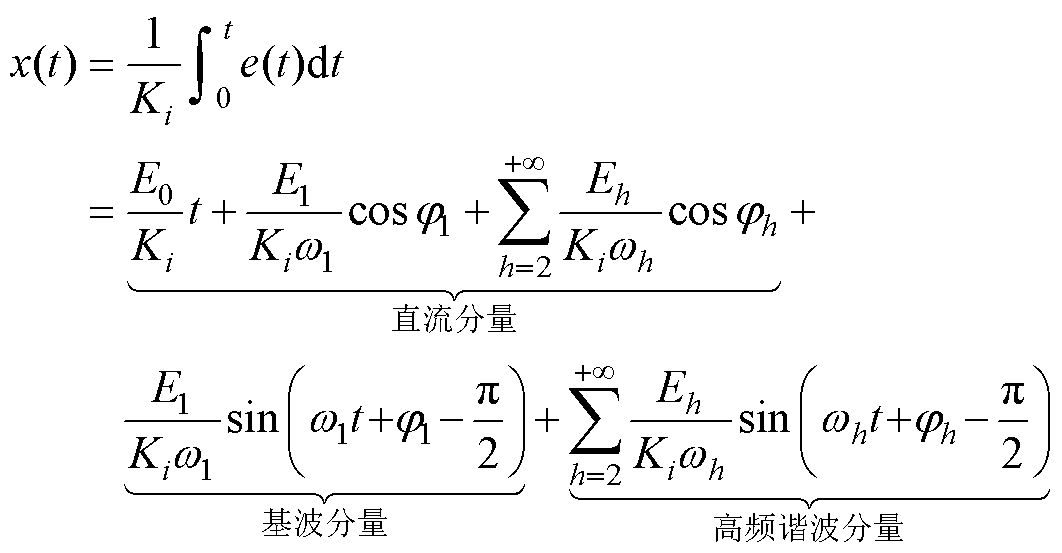
当对式(4)的反电动势积分获得行程信号时,可得
 (5)
(5)
由式(5)可以看出,采用纯积分器进行活塞行程观测时,观测到的行程信号不仅存在较大直流分量和高频谐波分量,且直流分量中还存在与时间成正比的 项,该项将使得直流分量不断累加,最终导致积分饱和。
项,该项将使得直流分量不断累加,最终导致积分饱和。
为方便后续推导,根据式(4)可直接写出对应速度信号的时域形式为
 (6)
(6)
式中, 、
、 、
、 分别为基于反电动势计算出的直流分量、基波分量和高频谐波分量的幅值。
分别为基于反电动势计算出的直流分量、基波分量和高频谐波分量的幅值。
对式(6)进行Laplace变换,可得速度信号的复频域形式V(s)为
 (7)
(7)
式中,s为Laplace算子。
采用纯积分器获取行程信号会导致纯积分饱和问题。为此,学者们研究了LPF和SOGI,以解决纯积分饱和问题。然而,LPF所观测的活塞行程存在幅值衰减和相位偏移问题,SOGI虽然能够获得较为精确的行程观测结果,但该方法只能对直流分量进行抑制,无法完全消除直流分量的影响。下面分别对这两种滤波器进行分析。
LPF能够对信号中的直流分量和高频谐波进行抑制,其传递函数为
 (8)
(8)
式中, 为LPF的截止频率。
为LPF的截止频率。
采用LPF时,可得复频域下行程观测结果为
 (9)
(9)
对式(9)进行Laplace反变换,可得时域下活塞行程观测的结果为
 (10)
(10)
由式(10)可以看出,采用LPF观测的活塞行程也含有直流分量、基频分量和高频谐波分量。其中,直流分量中没有随时间增加会导致积分饱和的项,且第二、三项会随着时间推移而衰减至零。此外,高频谐波分量幅值的分母相较于纯积分器分母更大,从而起到了高频谐波抑制作用。然而,其基频分量和高频分量中均出现了幅值衰减项 、
、 与相位偏移项
与相位偏移项 、
、 ,故采用LPF得不到较好的行程观测结果。
,故采用LPF得不到较好的行程观测结果。
近年来,SOGI已被广泛应用于旋转电机的无位置传感器中,其结构框图如图2所示。
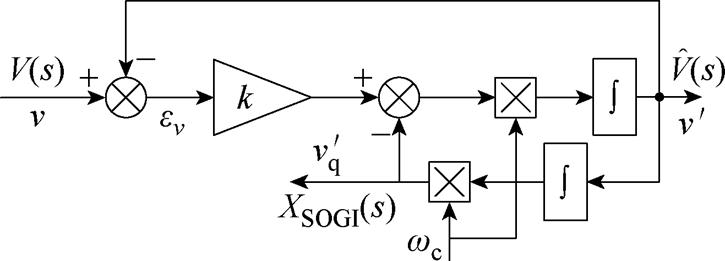
图2 SOGI结构框图
Fig.2 SOGI structure block diagram
图2中, 为输入信号,
为输入信号, 和
和 分别为滤波输出信号和其正交信号,对应的传递函数分别为
分别为滤波输出信号和其正交信号,对应的传递函数分别为
 (11)
(11)
 (12)
(12)
式中, 为SOGI的增益系数;
为SOGI的增益系数; 为SOGI的中心频率。当系统处于稳态时,令Laplace算子
为SOGI的中心频率。当系统处于稳态时,令Laplace算子 ,则式(12)可以写为
,则式(12)可以写为
 (13)
(13)
从式(13)可以看出,QSOGI(s)可作为积分器使用,从而可设计基于SOGI的活塞行程观测方法,其表达式为
 (14)
(14)
将式(7)代入式(14),并进行Laplace反变换,可得时域下利用SOGI观测到的活塞行程为
 (15)
(15)
其中
可以看出,由SOGI观测到的活塞行程中包含直流分量、基波分量和高频谐波分量。其中,直流分量仅被抑制并没有被完全消除,其大小与速度量、增益系数和基波频率 相关。当系统中直流分量变大或谐振频率较低时,采用SOGI观测到的活塞行程信号中将会出现较大的直流偏置;基波分量为理想正弦波,不存在纯积分器的饱和效应或低通滤波器的幅值衰减或相位偏移问题;高频谐波的幅值与
相关。当系统中直流分量变大或谐振频率较低时,采用SOGI观测到的活塞行程信号中将会出现较大的直流偏置;基波分量为理想正弦波,不存在纯积分器的饱和效应或低通滤波器的幅值衰减或相位偏移问题;高频谐波的幅值与 成反比关系。当频率比
成反比关系。当频率比 较大时,
较大时, ,此时高频谐波将受到一定程度抑制。
,此时高频谐波将受到一定程度抑制。
由第1.2节及第2节分析可知,纯积分器、LPF和SOGI三者中SOGI性能最优,然而它对直流分量只能抑制,无法完全消除,大型LOM低谐振频率运行或电源不稳导致电压电流信号中存在较大直流偏置时,观测器的性能将受到较大影响,导致行程控制不准确,甚至发生撞缸事故。为此,本文设计了基于HOGI的改进型活塞行程观测方法,利用HOGI的多重反馈滤波特性,完全消除直流分量的影响,进一步提高观测器性能。
基于如图2所示的传统SOGI结构,HOGI结构框图如图3所示。
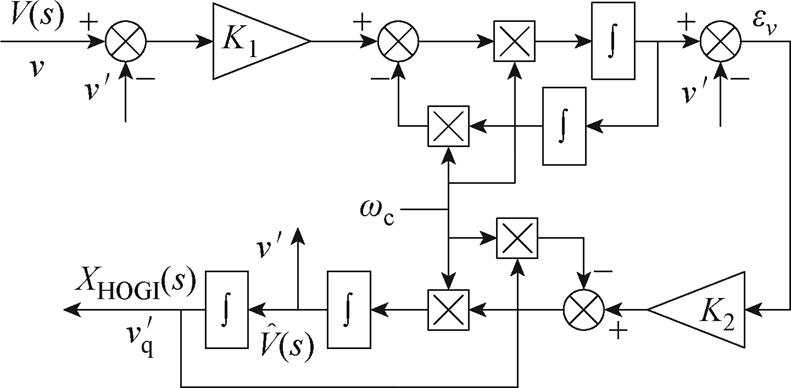
图3 HOGI结构框图
Fig.3 HOGI structure block diagram
HOGI中包含两个SOGI结构,且采用输出信号反馈滤波方式,实现了对滤波输入信号的多重滤波效果。因此,相较于传统SOGI,HOGI具有更强的滤波特性,能够彻底消除直流分量的影响。
由图3可得HOGI的传递函数为
 (16)
(16)
 (17)
(17)
式中, 和
和 为HOGI的增益系数;和分别为HOGI输出的滤波信号和积分信号。
为HOGI的增益系数;和分别为HOGI输出的滤波信号和积分信号。
当系统处于稳态时,令Laplace算子,则式(17)可以表示为

 (18)
(18)
可以看出, 也具有积分滤波特性。基于此,可设计基于HOGI的行程观测方法为
也具有积分滤波特性。基于此,可设计基于HOGI的行程观测方法为
 (19)
(19)
将式(7)代入式(19),并进行Laplace反变换,可得时域下利用HOGI观测到的活塞行程为
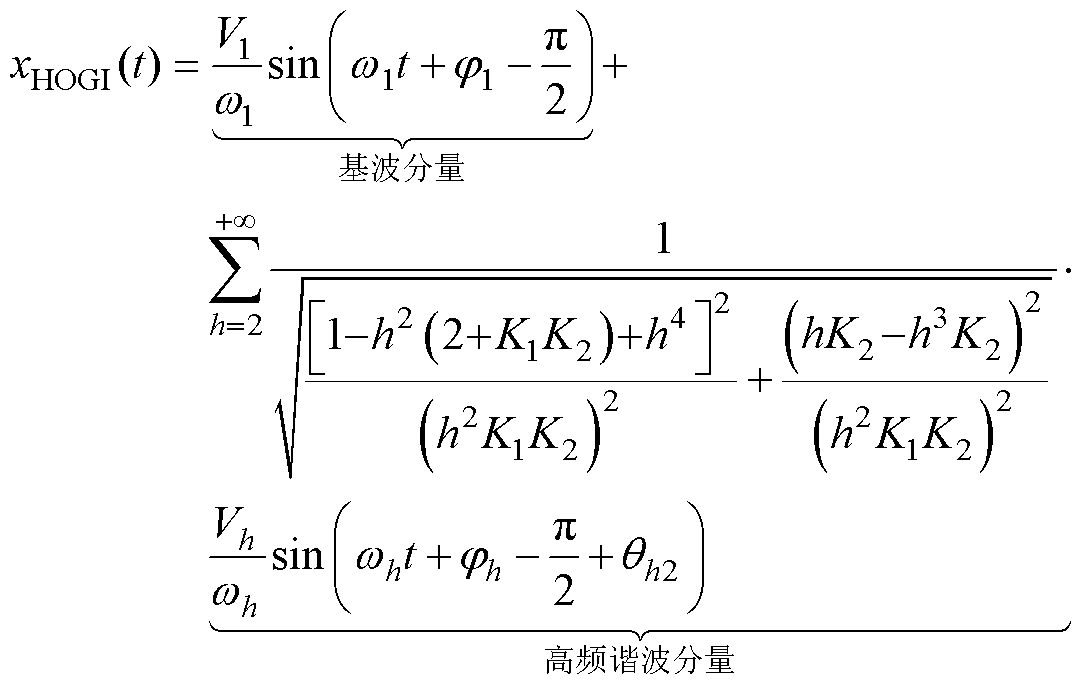 (20)
(20)
其中

由HOGI观测到的行程信号中包括:基波分量和高频谐波分量。与SOGI不同的是,直流分量能够被HOGI完全滤除;基波分量与SOGI相同即为理想正弦波;高频谐波幅值与 成反比,当频率比较大时,该幅值满足
成反比,当频率比较大时,该幅值满足
 (21)
(21)
根据上述分析可知,HOGI比SOGI具有更强的高频谐波抑制能力,且能够完全消除直流分量的 影响。
为突出HOGI的有效性及优越性,下面采用Bode图将其与纯积分器、LPF和SOGI进行对比分析。由于后续实验样机在5 mm行程时的谐振频率约为23.9 Hz,为体现HOGI的滤波特性,将SOGI和HOGI的中心频率设置为 ,LPF的截止频率为
,LPF的截止频率为 。为确保对比的公平性,将各增益系数设定为
。为确保对比的公平性,将各增益系数设定为 ,
, ,
, ,使得SOGI和HOGI调节时间均为0.038 s。分别根据不同滤波器的传递函数,画出对应的Bode图如图4所示。
,使得SOGI和HOGI调节时间均为0.038 s。分别根据不同滤波器的传递函数,画出对应的Bode图如图4所示。
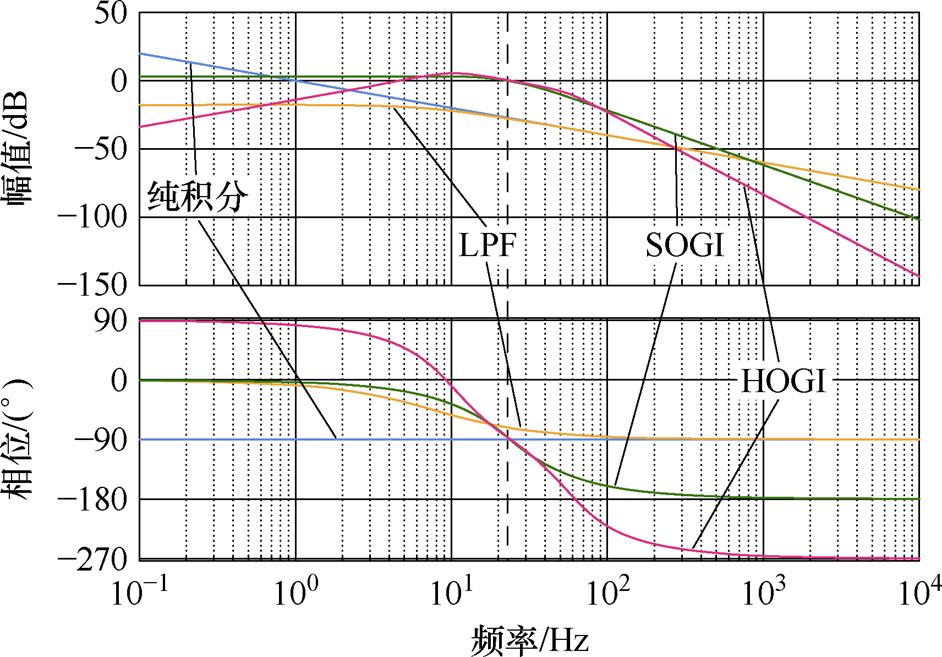
图4 四种滤波器的对比Bode图
Fig.4 Bode diagram for comparison of four integrators
根据上述采用不同滤波器获得的活塞行程观测结果以及Bode图的对比结果,可以得出如下结论:
(1)由纯积分器观测到的行程信号中存在较大的直流分量,且直流分量随时间呈线性增加,最终导致积分饱和问题。
(2)LPF可以在一定程度上抑制直流分量,但会造成相应的幅值衰减和相位偏移,其截止频率设定越低,幅值衰减和相位偏移的程度就越大。
(3)SOGI具有较好的谐波衰减能力,但低频段信号的衰减速度为0 dB/dec,这说明其并不能完全滤除直流分量。
(4)HOGI在低频段和高频段幅值迅速下降,其幅频响应衰减速率分别为-20 dB/dec和-60 dB/dec,这说明其具有完全消除直流分量并进一步抑制高频谐波的能力。
下面基于前向欧拉法,设计HOGI的具体离散化实现方案。
根据图3,可得HOGI的状态方程为
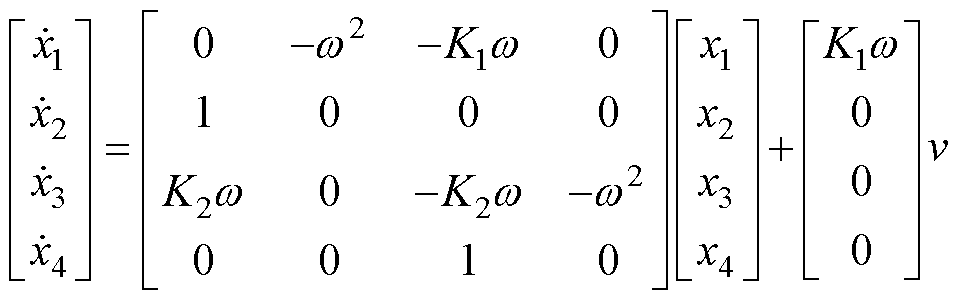 (22)
(22)
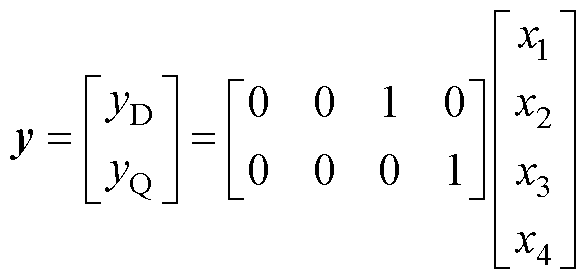 (23)
(23)
式中,x1、x2、x3和x4为HOGI的状态变量;yD和yQ分别为其滤波和积分输出。
设T为采样周期,将 代入式(22)和式(23),可得离散化后的状态方程为
代入式(22)和式(23),可得离散化后的状态方程为
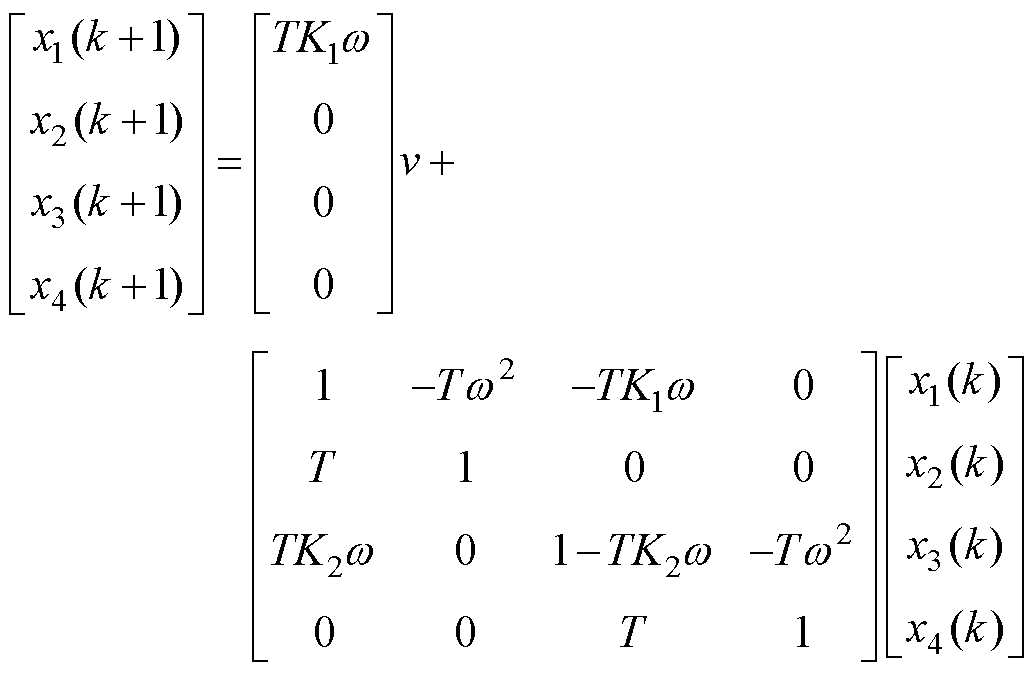 (24)
(24)
 (25)
(25)
基于上述推导,可实现对HOGI实验编程,具有计算量小、简单易实现等优点。根据上述所设计的HOGI,可得基于HOGI及反电动势积分法的LOM无位置传感器控制框图如图5所示。
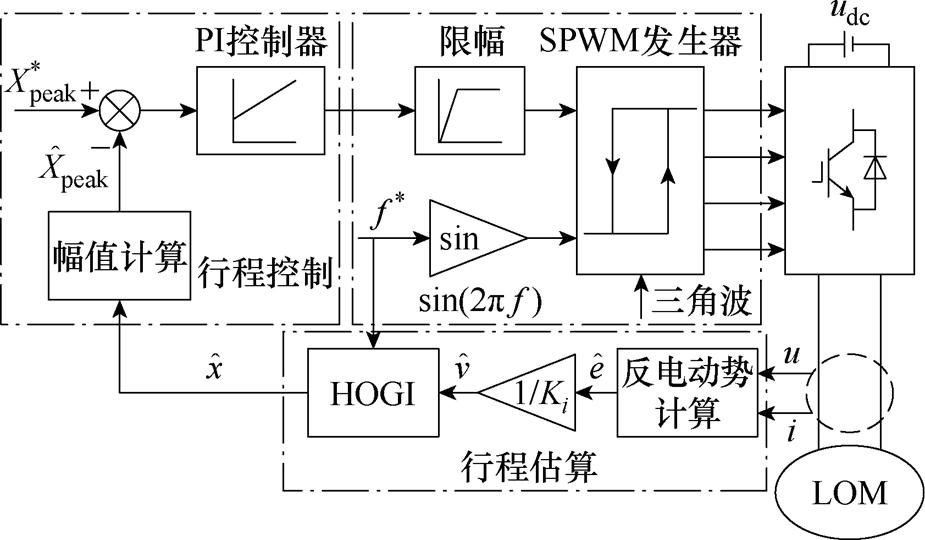
图5 基于HOGI活塞行程观测器的LOM控制框图
Fig.5 Block diagram of the LOM control system based on the HOGI stroke estimator and controller
本文采用的实验平台如图6所示。该平台以120 W LOM样机作为原型驱动电机,负载为压缩机气缸,三相调压器用于调节直流母线电压大小,LVDT位置传感器用于测量实际活塞行程信号。控制芯片采用STM32F407,控制频率为5 kHz。实验样机的参数见表1。
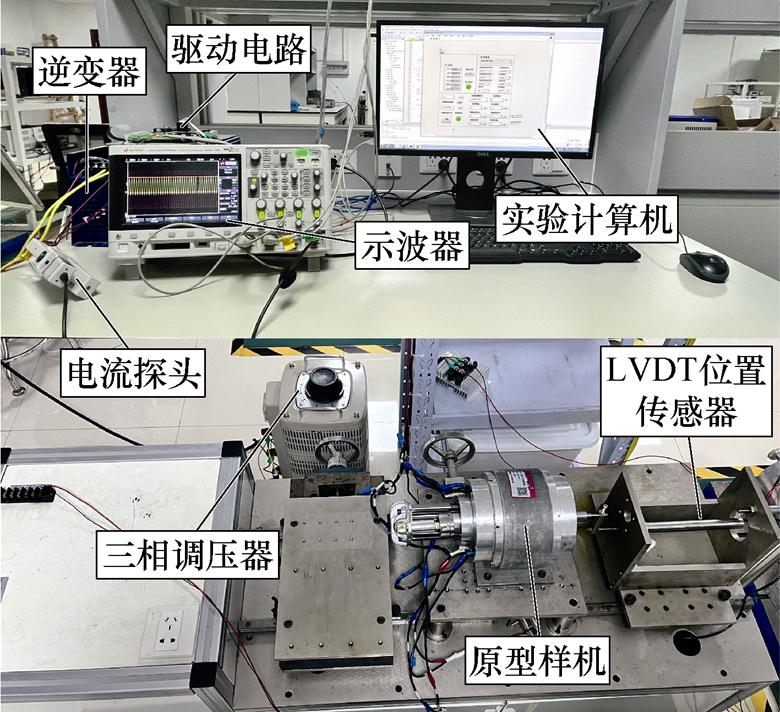
图6 实验平台
Fig.6 Experiment platform
表1 直线振荡电机参数
Tab.1 Parameters of linear oscillatory machine
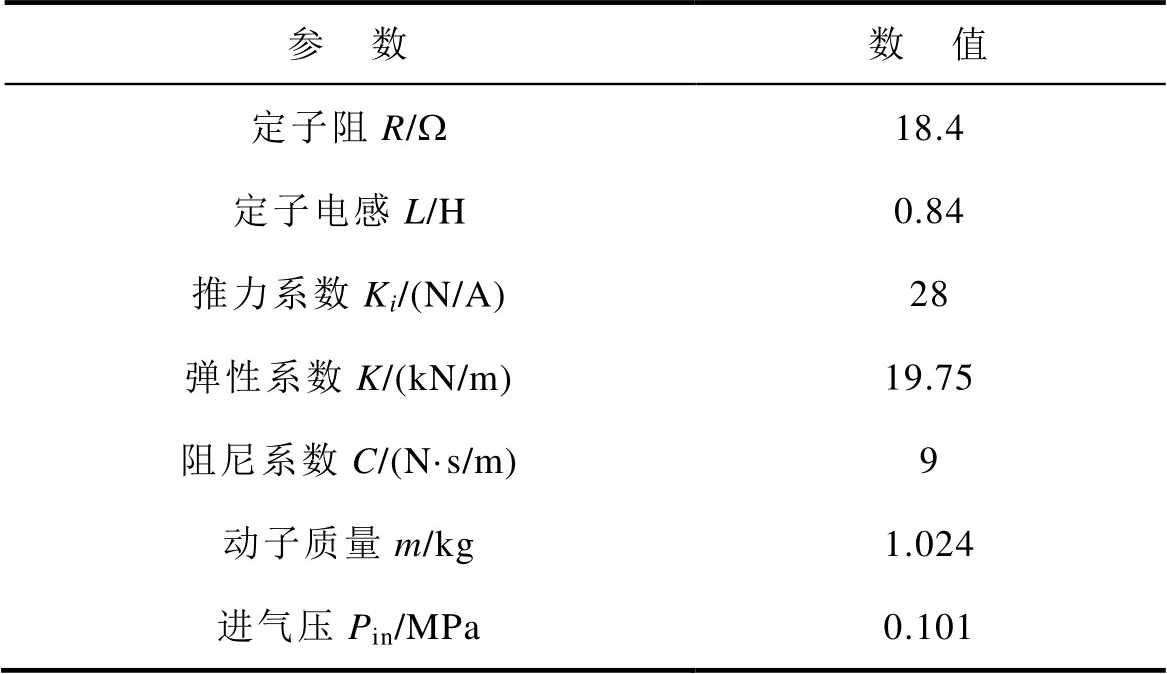
参 数数 值 定子阻R/W18.4 定子电感L/H0.84 推力系数Ki/(N/A)28 弹性系数K/(kN/m)19.75 阻尼系数C/(N·s/m)9 动子质量m/kg1.024 进气压Pin/MPa0.101
由于文献[21]已对纯积分器、LPF和SOGI进行了详细的实验对比分析,证明了纯积分器会导致积分饱和以及LPF存在幅值衰减和相位偏移问题,故本文将不再对上述两种滤波器进行实验验证。为突出本文所提HOGI的优越性,本文将SOGI与HOGI进行实验对比,详细内容如下。
首先,在没有额外加入直流分量的情况下,对SOGI和HOGI两种滤波器的性能进行实验分析。本文实验研究需保证LOM始终以系统谐振频率运行,因为不同频率对电机数学模型的精度会造成一定影响,当且仅当电机运行在系统谐振频率点时,电机模型精度最高。
设置活塞行程给定值为5 mm,电机运行频率为23.9 Hz(系统谐振频率),基于反电动势积分法,分别研究SOGI和HOGI作为滤波器时的行程观测结果,如图7所示。可以看到,在电机达到稳态后,此时气缸的排气压力约为0.18 MPa,SOGI的活塞行程观测误差为0.348 mm,而HOGI的活塞行程观测误差为0.292 mm,绝对误差降低0.056 mm。运行一段时间后,将行程参考信号设置为8 mm,频率设置为系统谐振频率24.5 Hz,研究增行程增负载工况下滤波器的性能。电机稳定运行后,此时气缸的排气压力约为0.27 MPa,实验结果如图8所示。此时,SOGI的活塞行程观测误差为0.408 mm,相比之下,HOGI的观测误差为0.341 mm,绝对误差降低了0.067 mm。
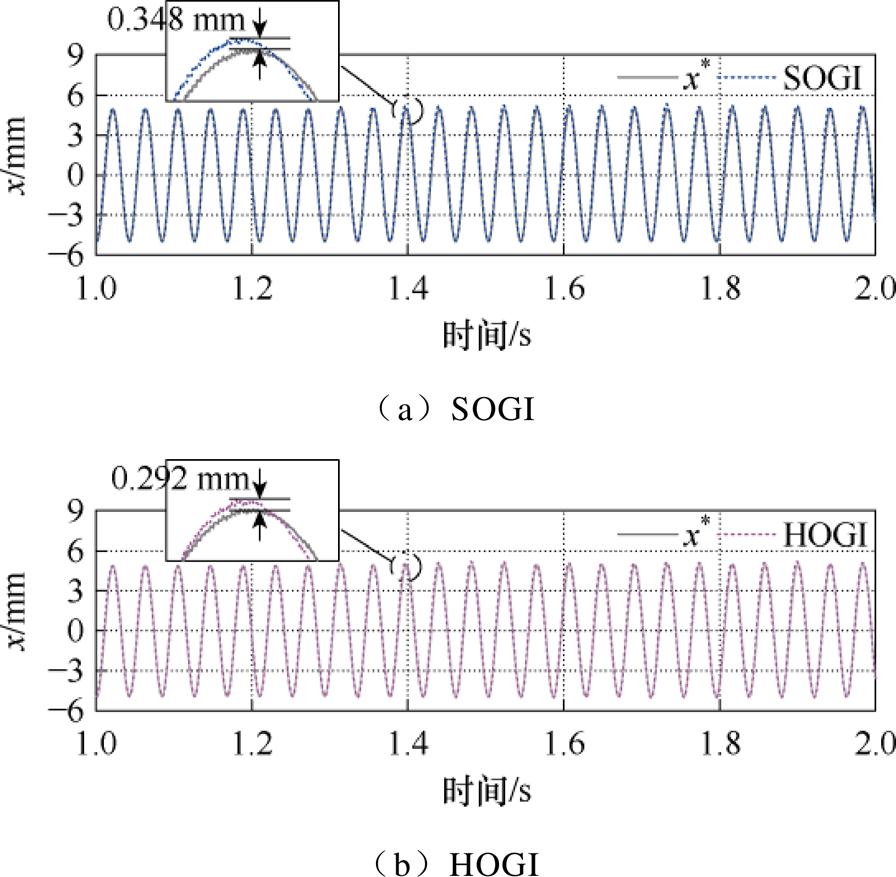
图7 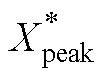 =5 mm时SOGI和HOGI活塞行程观测结果
=5 mm时SOGI和HOGI活塞行程观测结果
Fig.7 Stroke observation results of SOGI and HOGI at =5 mm
图8 =8 mm时SOGI和HOGI活塞行程观测结果
Fig.8 Stroke observation results of SOGI and HOGI at =8 mm
最后设置行程参考信号为 =6 mm,将电机频率设置为系统谐振频率24.1 Hz,实现减行程减负载工况,稳定后的实验结果如图9所示,此时气缸的排气压力约为0.23 MPa。可以看到,SOGI的活塞行程观测误差为0.378 mm,相比之下,HOGI的观测误差为0.319 mm,绝对误差降低了0.059 mm。
=6 mm,将电机频率设置为系统谐振频率24.1 Hz,实现减行程减负载工况,稳定后的实验结果如图9所示,此时气缸的排气压力约为0.23 MPa。可以看到,SOGI的活塞行程观测误差为0.378 mm,相比之下,HOGI的观测误差为0.319 mm,绝对误差降低了0.059 mm。
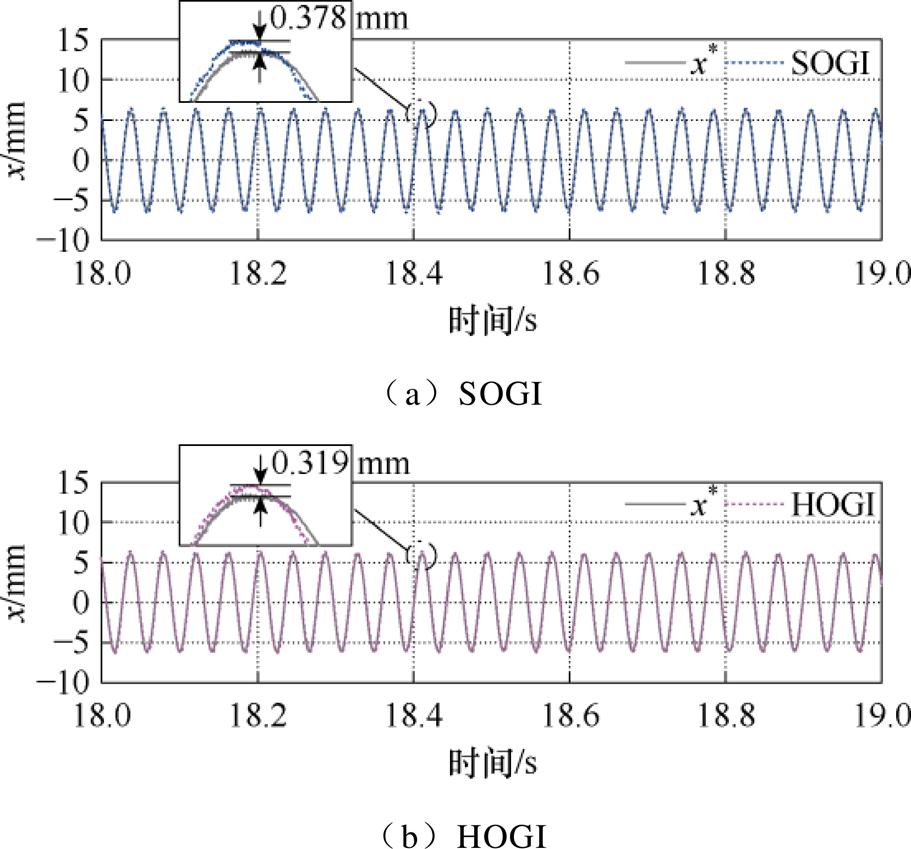
图9 =6 mm时SOGI和HOGI活塞行程观测结果
Fig.9 Stroke observation results of SOGI and HOGI at =6 mm
根据上述实验结果可以看出,在未额外加入直流分量时,该样机系统所采集的电压、电流信号中存在的直流分量较小,直流分量对不同滤波器的影响可以忽略。但是,系统中还不可避免地存在一些谐波分量,由于HOGI有更强的谐波抑制能力,因此其在=5 mm、=8 mm和=6 mm三种工况下的稳态观测误差相较于SOGI更小,说明HOGI具有比SOGI更高的观测精度,这对于需要实施高精度无位置传感器的空气压缩机场合具有重要意义。
由于实验平台自身的直流分量较小,为模拟由于电源扰动等原因产生的直流偏置情况,在上位机上将电流探头采集到的电流信号手动加入0.2 A的直流偏置,以进一步验证HOGI的优越性,下面对基于HOGI和SOGI滤波器的直流分量消除能力进行实验分析。
给定行程参考信号为=5 mm,在起动到稳定过程中,分别采用SOGI和HOGI的行程观测结果,如图10所示。可以看到,在电机运行达到稳态后,由SOGI观测到的活塞行程上止点偏移量为1.297 mm,下止点偏移量为1.438 mm,平均偏移量约为1.367 5 mm;而由HOGI观测到的活塞行程上止点偏移量为0.307 mm,下止点偏移量为0.294 mm,平均偏移量为0.3005 mm。
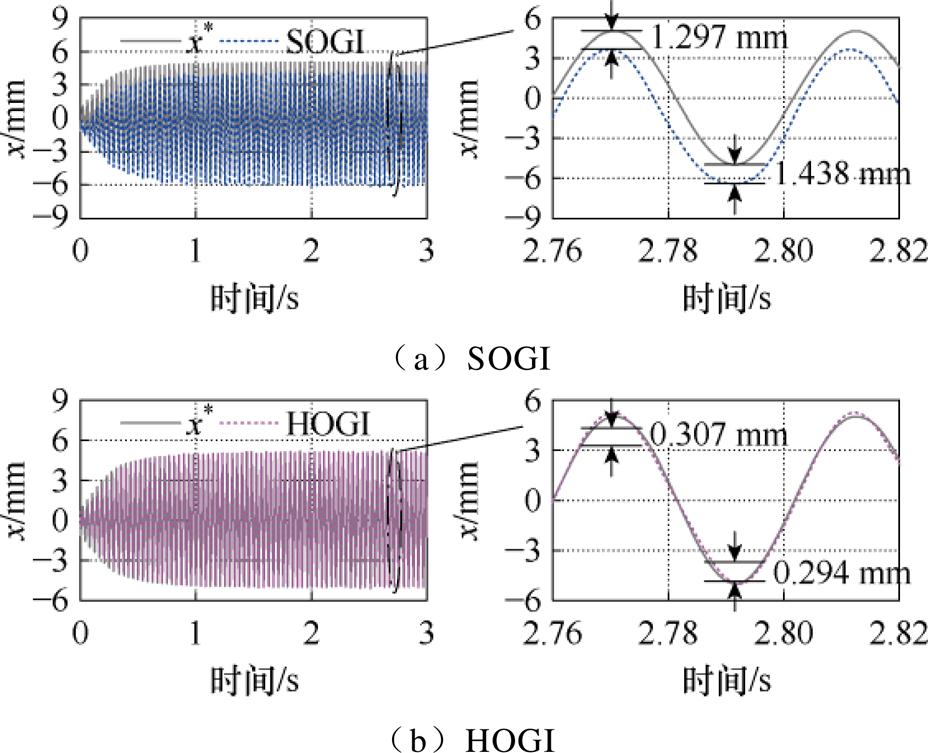
图10 起动过程SOGI和HOGI受直流分量影响结果(活塞行程从0 mm到5 mm)
Fig.10 The starting process SOGI and HOGI are affected by the DC component (piston stroke from 0 mm to 5 mm)
设置行程参考信号为=8 mm,同时调节频率至24.5 Hz,研究增行程增负载工况下不同滤波器的性能,结果如图11所示。可以看到,当电机稳定运行在8 mm行程后,由SOGI观测的活塞行程上止点偏移量为1.232 mm,下止点偏移量为1.471 mm,平均偏移量约为1.351 5 mm;而由HOGI观测的活塞行程上止点偏移量为0.347 mm,下止点偏移量为0.355 mm,平均偏移量为0.351 mm。

图11 增行程过程SOGI和HOGI受直流分量影响结果(活塞行程从5 mm到8 mm)
Fig.11 The effect of DC component on SOGI and HOGI during the process of increasing stroke (piston stroke from 5 mm to 8 mm)
最后,设置行程参考信号为=6 mm,调节频率至24.1 Hz,研究减行程减负载工况下不同滤波器的性能,结果如图12所示。由SOGI观测的活塞行程上止点偏移量为1.283 mm,下止点偏移量为1.447 mm,平均偏移量约为1.365 mm;相比之下,由HOGI观测的活塞行程上止点偏移量为0.312 mm,下止点偏移量为0.322 mm,平均偏移量为0.317 mm。

图12 减行程过程SOGI和HOGI受直流分量影响结果(活塞行程从8 mm到6 mm)
Fig.12 The results of SOGI and HOGI being affected by the DC component during the stroke reduction process (piston stroke from 8 mm to 6 mm)
根据上述增加直流分量后,分别采用SOGI和HOGI两种滤波器对活塞行程观测的结果可以看出,当设置电流直流偏置为0.2 A时,SOGI在5、8和6 mm三种给定行程下观测的活塞行程平均偏移量分别为1.367 5、1.351 5和1.365 mm,而HOGI在这三种给定行程下的活塞行程观测值相较于未额外加入直流分量时几乎不变。因此,采用HOGI在直流分量扰动较为严重的场合进行活塞行程观测时能够完全不受直流分量的影响,具有更好的滤波性能。
本文提出了一种基于HOGI的改进型直线振荡电机无位置传感器控制方法,该方法采用高性能HOGI代替传统SOGI,能够完全消除直流分量的影响,提高行程观测性能。实验结果表明,在未额外加入直流分量时,相较于传统基于SOGI的行程观测方法,采用HOGI能够获得更为精确的行程观测结果。而在加入0.2 A的额外直流偏置时,基于SOGI的活塞行程观测方法在5、8和6 mm时行程估计的平均偏移量分别为27.35%、16.89%和22.75%,而采用HOGI获得的行程信号不受直流分量的影响,仍然能够获得较好的观测结果。因此,采用HOGI的活塞行程观测方法更适用于需要实施高精度无位置传感器控制或受直流分量干扰较为严重的场合。
参考文献
[1] 徐伟, 李想, 廖凯举, 等. 直线振荡电机拓扑结构及应用综述[J]. 电工技术学报, 2022, 37(21): 5377- 5401.
Xu Wei, Li Xiang, Liao Kaiju, et al. Overview of linear oscillatory machines: topology and appli- cation[J]. Transactions of China Electrotechnical Society, 2022, 37(21): 5377-5401.
[2] 陈梁远, 李黎川. 压缩机用直线电机及其关键技术发展综述[J]. 中国电机工程学报, 2013, 33(15): 52-68.
Chen Liangyuan, Li Lichuan. Development of the linear motor and its key technologies for com- pressors[J]. Proceedings of the CSEE, 2013, 33(15): 52-68.
[3] Boldea I, Tutelea L N, Popa A. Linear oscillatory electric motor/generators: an overview[C]//2021 13th International Symposium on Linear Drives for Indu- stry Applications (LDIA), Wuhan, China, 2021: 1-7.
[4] 张洪彬, 徐志科, 金龙, 等. 混合叠压圆筒型永磁直线振荡电机电磁特性分析[J]. 电工技术学报, 2023, 38(19): 5090-5100, 5140.
Zhang Hongbin, Xu Zhike, Jin Long, et al. Electro- magnetic characteristics analysis of tubular permanent magnet linear oscillation actuator with hybrid lamination[J]. Transactions of China Electrotechnical Society, 2023, 38(19): 5090-5100, 5140.
[5] 廖凯举, 徐伟, 葛健, 等. 基于积分滑模观测器的直线振荡电机谐振频率跟踪控制[J]. 电工技术学报, 2024, 39(14): 4366-4376.
Liao Kaiju, Xu Wei, Ge Jian, et al. Resonant frequency tracking control of linear oscillatory machine based on integral sliding mode observer[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4366-4376.
[6] Liao Kaiju, Xu Wei, Bai Lili, et al. Improved position sensorless piston stroke control method for linear oscillatory machine via an hybrid terminal sliding- mode observer[J]. IEEE Transactions on Power Electronics, 2022, 37(12): 14186-14197.
[7] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16):76-88.
Liu Jilong, Xiao Fei, Shen Yang, et al. Position- sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88.
[8] 李东暘. 直线振荡电机控制系统设计及其无位置控制算法研究[D]. 南京: 东南大学, 2020.
Li Dongyang. Design of linear oscillating motor control system and research on its position-less control algorithm[D]. Nanjing: Southeast University, 2020.
[9] 张金权, 畅云峰, 牛元君, 等. 直线冰箱压缩机活塞位移的自传感技术研究[J]. 西安交通大学学报, 2007, 41(9): 1049-1052, 1065.
Zhang Jinquan, Chang Yunfeng, Niu Yuanjun, et al. Study on self-sensing technique of linear refrigerator compressor’s piston displacement[J]. Journal of Xi’an Jiaotong University, 2007, 41(9): 1049-1052, 1065.
[10] Liao Kaiju, Xu Wei, Ge Jian, et al. Improved position sensorless resonant frequency tracking control method for linear oscillatory machine[J]. IEEE Transactions on Industrial Electronics, 2024, 71(4): 4038-4048.
[11] 于明湖. 直线压缩机用横向磁通永磁直线振荡电机系统研究[D]. 杭州: 浙江大学, 2011.
Yu Minghu. Research on transverse flux permanent magnet linear oscillation motor system for linear compressor[D]. Hangzhou: Zhejiang University, 2011.
[12] 畅云峰, 张金权, 邢子文. 直线电机参数对活塞位移自传感器输出的影响[J]. 西安交通大学学报, 2008, 42(11): 1382-1385.
Chang Yunfeng, Zhang Jinquan, Xing Ziwen. Effect of linear motor parameters on output of piston displacement self-sensor[J]. Journal of Xi’an Jiaotong University, 2008, 42(11): 1382-1385.
[13] Chun T W, Ahn J R, Lee H H, et al. A novel strategy of efficiency control for a linear compressor system driven by a PWM inverter[J]. IEEE Transactions on Industrial Electronics, 2008, 55(1): 296-301.
[14] Chun T W, Ahn J R, Tran Q V, et al. Method of estimating the stroke of LPMSM driven by PWM inverter in a linear compressor[C]//Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 2007: 403-406.
[15] Son J K, Chun T W, Lee H H, et al. Method of estimating precise piston stroke of linear compressor driven by PWM inverter[C]//2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 2014: 673-678.
[16] 周华伟, 叶晨, 陈铖, 等. 基于转子磁链观测器的五相容错PMSM开路故障下的无位置传感器控制[J]. 电工技术学报, 2023, 38(2): 422-434.
Zhou Huawei, Ye Chen, Chen Cheng, et al. Rotor-flux observer based sensorless control of five-phase fault- tolerant PMSM with open-circuit fault[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(2): 422-434.
[17] 王琛琛, 苟立峰, 周明磊, 等. 基于改进的离散域二阶滑模观测器的内置式永磁同步电机无位置传感器控制[J]. 电工技术学报, 2023, 38(2): 387-397.
Wang Chenchen, Gou Lifeng, Zhou Minglei, et al. Sensorless control of IPMSM based on improved discrete second-order sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 387-397.
[18] 赵文祥, 宋世昌, 周书文, 等. 改进滑模观测器的电流源逆变器驱动PMSM无位置传感器控制[J]. 电工技术学报, 2024, 39(4): 987-995.
Zhao Wenxiang, Song Shichang, Zhou Shuwen, et al. Sensorless control of current source inverter driven PMSM with improved sliding mode observer[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 987-995.
[19] 余海涛, 张涛. 直线振荡电机谐振频率跟踪控制技术研究[J]. 电机与控制学报, 2019, 23(6): 63-72.
Yu Haitao, Zhang Tao. Strategy of resonant frequency tracking for linear oscillatory actuator[J]. Electric Machines and Control, 2019, 23(6): 63-72.
[20] 张涛. 直线振荡电机控制系统研究[D]. 南京: 东南大学, 2018.
Zhang Tao. Research on control system of linear oscillatory actuator[D]. Nanjing: Southeast University, 2018.
[21] Xu Wei, Liao Kaiju, Wang Qizhe, et al. A stroke estimation method for linear oscillatory machine using an improved sliding mode observer[J]. IEEE Transactions on Industry Applications, 2022, 58(6): 7286-7296.
[22] Xu Wei, Li Xiang, Zhu Jianguo, et al. 3-D modeling and testing of a stator-magnet transverse-flux linear oscillatory machine for direct compressor drive[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 8474-8486.
Abstract Implementing sensorless control is necessary to reduce the system volume of linear oscillatory machines (LOM) used in linear compressors and achieve efficient and reliable operation. The existing piston stroke observers have low observation accuracy and are susceptible to DC components, resulting in a decrease in system compression performance or cylinder collision risk. Therefore, this paper designs an improved high-precision piston stroke observer for linear oscillation machines based on a high-order generalized integrator (HOGI).
Firstly, a theoretical analysis is conducted on traditional back electromotive force integration, low-pass filter (LPF), and second-order generalized integrator (SOGI), elucidating the existence of integral saturation problems in back electromotive force integration, amplitude attenuation, and phase shift problems in LPF. SOGI performs slightly better than the previous two but still cannot eliminate the DC component. When operating at low resonant frequencies or in systems with large DC components, SOGI is no longer applicable. Secondly, in response to the shortcomings of traditional integrators, this paper adopts HOGI as a piston stroke observer. This method can eliminate the DC component, and no DC bias exists in the observed stroke signal. The paper also uses the forward Euler method to derive the digital implementation method of HOGI. Finally, experiments are conducted to compare SOGI and HOGI. The experimental results show that the piston stroke observed by HOGI is more accurate than SOGI without additional DC bias. Furthermore, when an additional 0.2 A DC bias is added, the piston stroke average offset observed by SOGI at the given value of 5 mm, 6 mm, and 8 mm is 1.367 5 mm, 1.365 mm, and 1.351 5 mm, respectively. The piston stroke observed by HOGI is unaffected by DC bias. Therefore, the piston stroke observer with HOGI is suitable for occasions with serious DC disturbance.
The contributions of this paper are as follows. (1) Based on traditional SOGI, an improved HOGI piston stroke observation structure is designed. Multiple filtering feedback characteristics are used to eliminate the influence of DC components on stroke observation results, improving the accuracy of the piston stroke observation. (2) The complex frequency domain method is used to analyze the pure integrator, LPF, SOGI, and HOGI. The superiority of HOGI is theoretically proven. (3) Based on the forward Euler method for discretization and digital implementation of HOGI, this method has the advantages of simple calculation and easy implementation.
Keywords:Linear oscillatory machine (LOM), position sensorless control, high-order generalized integrator (HOGI), DC component suppression, forward Euler method
中图分类号:TM32
DOI: 10.19595/j.cnki.1000-6753.tces.240479
国家自然科学基金面上项目(52277050)、深圳市协同创新计划国际科技合作项目(GJHZ20210705142539007)资助。
收稿日期 2024-03-27
改稿日期 2024-05-28
廖光钰 男,2000年生,硕士研究生,研究方向为新型直线振荡电机设计及高性能控制。
E-mail: gyliao@hust.edu.cn
廖凯举 男,1991年生,特别研究助理,研究方向为直线振荡电机无位置传感器高效高可靠控制。
E-mail: kaijuliao@mail.iee.ac.cn(通信作者)
(编辑 崔文静)