图1 自由区电磁炉系统示意图
Fig.1 Schematic diagram of free zone induction cooker system
摘要 锅具位置辨识是实现自由区电磁炉自适应加热和功率调节的关键因素。传统的锅具位置辨识方法易受外界因素波动的影响,或需要大量的样本数据,在锅具位置辨识的准确性及速度上存在明显不足,且未考虑锅具偏移对电磁炉功率输出的影响。为此,该文通过建立锅具和感应加热线圈之间的等效电路模型,分析锅具位置偏移影响系统阻抗和电流相位的机理,在此基础上提出利用电流相位实现锅具位置的辨识方法,以控制开关阵列实现锅具位置的定位加热。同时,引入可调电容电路实现偏移工况下电磁炉最大功率输出,借此提高锅具的加热速度和温升。最后搭建自由区电磁炉实验样机,验证了锅具位置辨识方法和功率调节策略的有效性,位置辨识精度大于96%,位置辨识响应速度为0.8 ms,锅具位置辨识策略速度快、精度高,偏移工况下经功率调节策略锅具温升显著提升。提升了电磁炉炉面的利用率和用户体验,有利于自由区电磁炉的推广及应用。
关键词:自由区 电磁炉 锅具位置辨识 功率调节
感应加热(Induction Heating, IH)电磁炉利用涡流的热效应可实现厨具的快速加热,具有安全、环保、便捷等优点,被越来越多的用户所青睐[1-7]。针对传统家用电磁炉锅具需摆放到特定位置,其炉面利用率低、用户体验感差[8]的缺点,为实现锅具的摆放自由,自由区电磁炉应运而生,能对不同锅具进行用户定制加热,可大大提升电磁炉的使用灵活度。因此,开展自由区电磁炉的研究对实现“双碳”经济具有重大意义。
自由区电磁炉具有多个感应加热线圈,实际工作中需根据锅具位置来触发对应区域的加热线圈。为此,锅具位置辨识已成为自由区电磁炉亟待解决的关键问题。现阶段已有相关学者对电磁炉锅具位置辨识开展了相关研究,通常根据系统电参数的变化来反映外部物体的位置信息,主要有特征分析法和深度学习法。特征分析法主要采集输出电压、电流和功率特征来进行锅具位置的辨识,文献[9-10]根据系统输出电流有效值的差异来辨识锅具位置,但该方法辨识精度易受系统电压、电流波动的影响。文献[11-13]采用能量注入的方法实现自由区锅具位置的辨识,其需要准确采集电流振荡次数,否则会影响锅具位置的辨识精度。文献[14]则通过检测电流相位来判断电磁炉系统中不同锅具的类别,但未涉及锅具不同偏移工况下实际位置的判断。此外,针对无线电能传输系统的异物检测方法[15],可以作为锅具位置辨识的借鉴。文献[16]提及了根据损耗功率检测无线电能传输中异物的方法,该方法仍依据有效值的大小进行辨识,辨识精度易受系统电压和电流波动的影响。文献[17-18]则通过采集谐振频率来进行判断,该方法仅能判断异物是否处于系统内,未提出如何判断异物的实际位置。文献[19]提出了一种基于磁场计算的金属建模方法,理论推导了通过采集电流相位解决金属异物的分类识别。文献[20]则是通过检测线圈的品质因数,识别系统内异物的不同材质。上述的检测方法可实现系统内的异物检测,但均无法判断异物的具体位置。
深度学习法主要靠训练样本数据建立相应的模型辨识锅具位置,文献[21-22]提出基于深度学习的自由区电磁炉锅具位置辨识方法,利用与电压和电流大小相关的参数进行判断,易受系统电压、电流波动的影响。文献[23]通过机器学习算法处理4个特征集识别锅具材料,但未涉及偏移时位置的辨识。文献[24]基于最小均方模糊C均值聚类对锅具进行识别,其需要在不同频率下进行大量实验,进行模型训练后可以辨识不同尺寸的锅具,但对于锅具位置的偏移情况,仅提到了需要关注浪涌电流以保护控制系统的可靠性。以上基于机器学习的辨识方法需要事先建立大量的样本数据,具有训练时间长和辨识速度慢等不足。因此探究不易受电压、电流有效值大小波动的影响,无需大量的样本数据实时辨识锅具位置的辨识方法尤为重要,且上述文献均未提及锅具偏移情况下对功率降低的影响和解决方法。文献[25]对传统单线圈电磁炉采用调谐电路来提高功率,其调谐电路结构较为复杂且不可根据实际位置实时进行有效调节。在自由区电磁炉中功率调节的运行会影响锅具位置辨识的准确性,因此在自由区电磁感应加热中,需要先进行锅具位置辨识后再进行自适应功率调节。
为解决自由区电磁炉的锅具位置辨识速度和准确性及锅具偏移下功率降低问题,本文根据电路原理分析了自由区电磁炉的系统特性,提出了基于电流相位检测的自由区电磁炉锅具位置辨识方法,并提出了利用最大电流搜索的扰动观测法对可调电容电路进行自适应调节的功率调节策略,实现了锅具偏移情况下电磁炉最大功率输出,提高加热速度。其中,感应加热线圈支路采用并联独立控制,锅具位置辨识采用巡检方法。与现有的策略相比,所提控制方法不受系统有效值波动的影响且无需大量的数据集,可实现对锅具位置的实时辨识,辨识速度快、精度高,在锅具位置偏移的情况下的功率调节策略可以提高功率和加热速度。最后结合有限元仿真并搭建实验平台验证了所提锅具位置辨识策略的准确性和快速性;功率调节策略提高了功率和加热速度,在锅具不同工况下能快速准确地辨识所在位置并提高功率和加热速度。
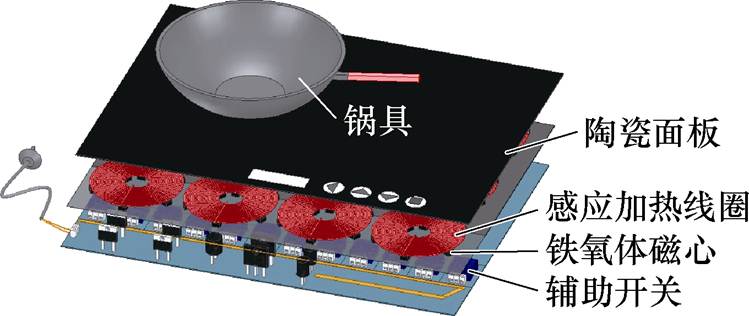
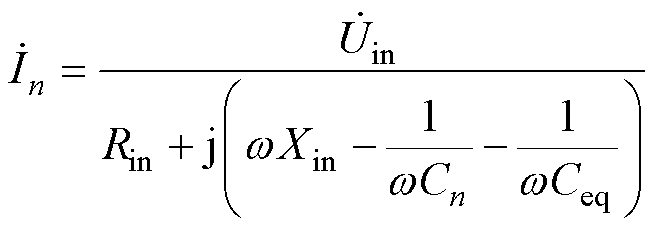
自由区电磁炉系统示意图如图1所示,主要由高频电源、加热部件、铁氧体磁心和陶瓷面板等组成。其中,加热部件由阵列感应加热线圈构成,通过辅助开关实现每个线圈的独立控制,感应加热线圈控制示意图如图2所示,uin为输入电压,Kn为继电器,Cn为补偿电容,线圈n为感应加热线圈。实际工作中,需根据锅具实时位置来触发对应区域的感应加热线圈工作,以满足自由区电磁炉的需求。因此,锅具位置状态会影响到自由区电磁炉系统的工作状态和加热性能[26]。
图1 自由区电磁炉系统示意图
Fig.1 Schematic diagram of free zone induction cooker system

图2 感应加热线圈控制示意图
Fig.2 Schematic diagram of induction heating coil control
感应加热的等效电路模型与变压器相似,可以看作由一次侧和二次侧组成的简单系统,其等效电路如图3a所示[27-28],进一步转化为简化等效电路如图3b所示。图中,uin为输入电压,in为第n个感应加热线圈支路的输入电流,感应加热线圈等效为电感Ln与Rn的串联,Cn为补偿电容,M为感应加热线圈和锅具之间的互感,锅具等效为电感Ls与Rs的串联,w 为谐振角频率。
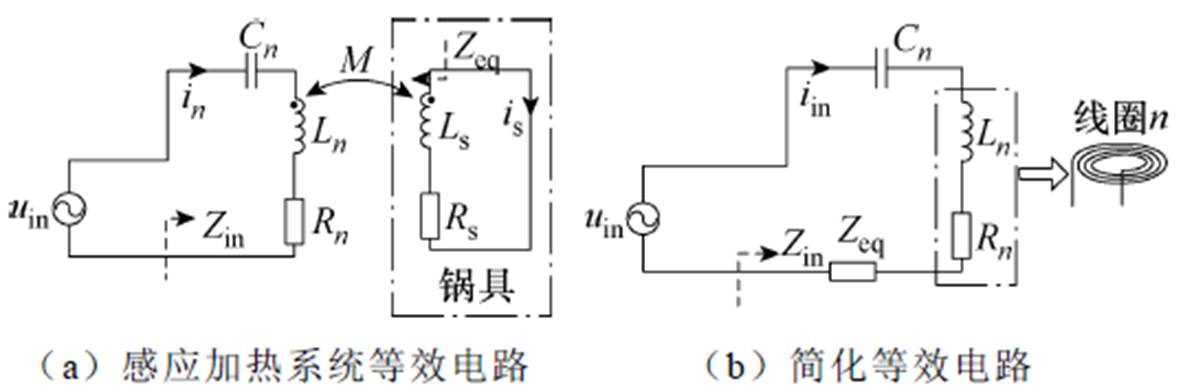
图3 感应加热系统等效电路
Fig.3 Equivalent circuit of induction heating system
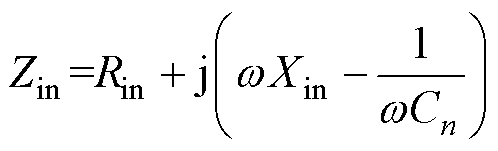
根据电路理论,可将二次侧折算到一次侧求得系统的输入阻抗Zin为
 (1)
(1)
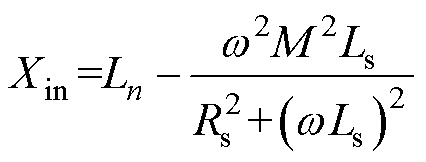
在等效电路模型中感应加热线圈和锅具的等效感抗之和Xin、感应加热线圈和锅具的等效电阻之和Rin分别为
 (2)
(2)
 (3)
(3)
由式(1)~式(3)可以看出,系统的阻值、感抗均受锅具和感应加热线圈之间互感M的影响,而利用互感M的变化可以研究锅具偏移距离d对Xin和Rin的影响。
文献[29-31]中考虑了匝数、负载电磁特性、频率等对阻抗的影响,但未提及同频率下锅具位置偏移情况对阻抗的影响。锅具和感应加热线圈的互感M会受到锅具相对于感应加热线圈偏移距离d的影响,根据Maxwell仿真了锅具处于感应加热线圈不同位置下Xin和Rin的变化趋势如图4所示,其表现为锅具偏离感应加热线圈中心位置较远处,Xin呈增大的趋势,Rin呈减小的趋势。
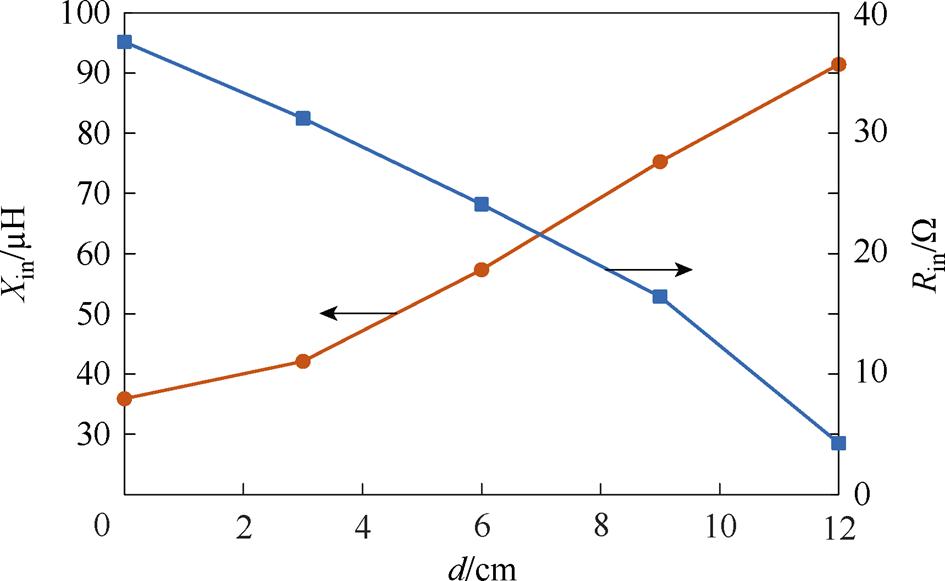
图4 锅具偏移距离d和Rin、Xin的变化趋势
Fig.4 Variation trend of misalignment distance d, Rin and Xin of pot
由上述分析可知,锅具位置的不同会影响Xin和Rin的变化,其表现为锅具与感应加热线圈之间互感M的变化,且偏移距离d越远,互感M越小,以上是在单感应加热线圈中分析,在自由区电磁炉线圈并联情况下,上述理论分析同样适用。
为了更好地提高自由区电磁炉炉面利用率,并考虑产品的美观性,所设感应加热线圈外径较贴近炉面边缘且感应加热线圈之间间距较小,从图5可以看出,区域1构成最小三线圈结构,且区域2、3、4均由区域1延伸或旋转构成,因此区域1为最小的自由区电磁炉结构,实验验证了控制策略在最小三线圈自由区电磁炉系统中适用,即在多感应加热线圈的自由区电磁炉系统中同样适用。
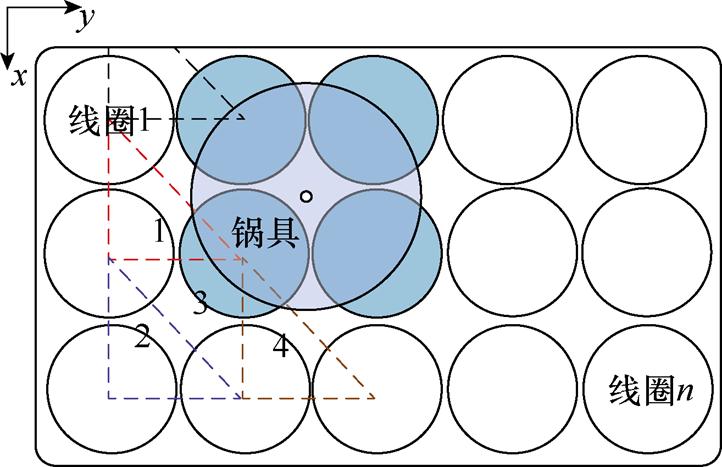
图5 自由区感应加热线圈示意图
Fig.5 Schematic diagram of free zone induction heating coil
根据图3等效电路可以推导出感应加热线圈支路的电流相位表达式为
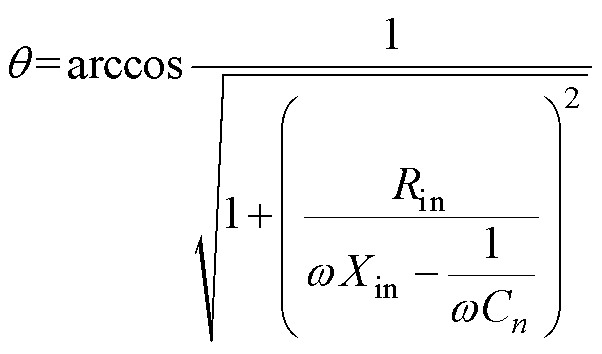 (4)
(4)
由上述分析可知,偏移距离d的增大会使互感M减小,表现为Rin减小和Xin增大,结合式(4)可得偏移距离d的增大会影响电流相位q 的增大,因此锅具位置的偏移会影响电流相位的变化。
通过以上理论和仿真分析得出,锅具偏移距离d和所在感应加热线圈支路电流相位q 的关系趋势如图6所示。
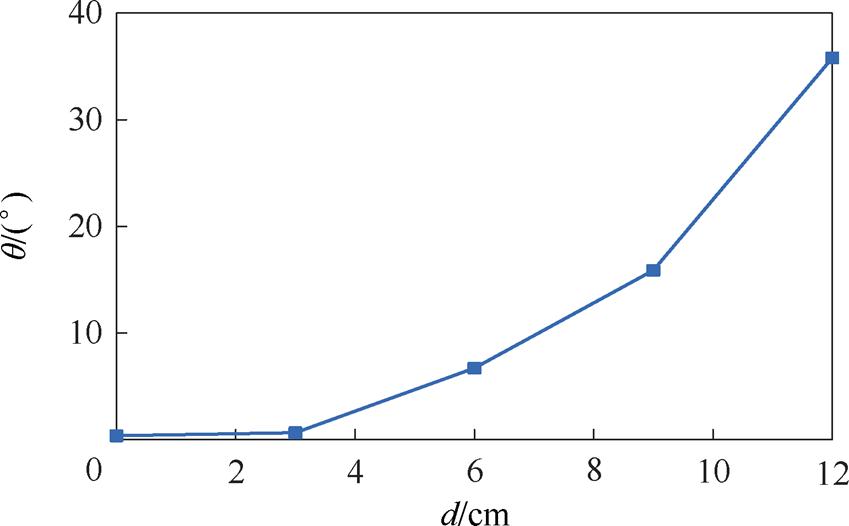
图6 锅具偏移距离d与相位q 的变化趋势
Fig.6 Variation trend of misalignment distance d and phase q of pot
根据锅具位置的不同使得各感应加热线圈支路输入电流in相位不同,若所设谐振电容Cn与锅具处于感应加热线圈正中心位置谐振时,各感应加热线圈支路电流in与输入电压uin相位差为0。锅具越偏离线圈感应加热线圈,支路电流in与输入电压uin相位差越明显,且呈感性状态,由此采集各感应加热线圈支路电流in并判断其相位差值可以辨识锅具的位置信息。
由于感应加热线圈和锅具均为圆形规则形状,因此仅凭单一感应加热线圈支路的相位信息在自由区电磁炉系统中并不能准确判断锅具位置。单一感应加热线圈如图7a所示,以感应加热线圈o为圆心,在距离圆心偏移d的一圈范围内相位相同。为提高自由区电磁炉系统中锅具位置的辨识准确度,本文采用巡检策略,根据多个感应加热线圈支路信息来最终确定锅具的具体位置,以此提高辨识的准确度,多感应加热线圈如图7b所示。
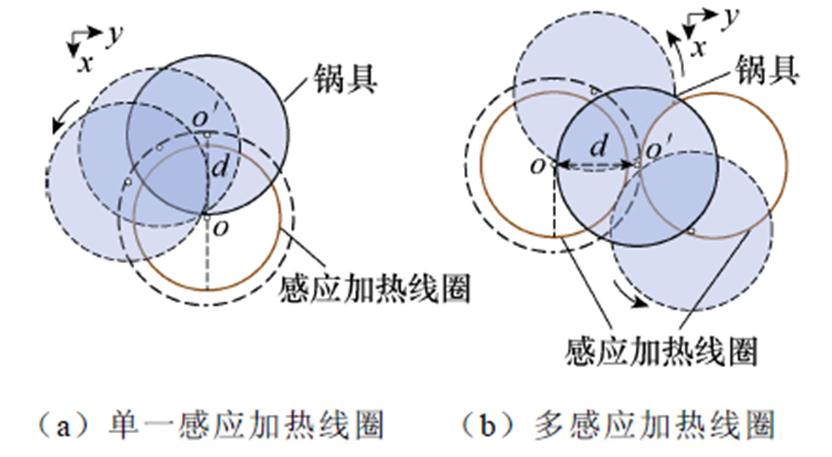
图7 锅具位置辨识分析
Fig.7 Analysis diagram of pot position identification
锅具辨识策略流程如图8所示,根据采集电流信息进行运算后得到的相位信息,通过比较设定比较器:处于所设阈值以内即为锅具处于感应加热线圈上,Hn输出高电平并保持;反之,Hn输出低电平,以此来判断锅具的位置信息。考虑到锅具放置时的抖动和延时性问题,为提高辨识精度及准确性,将判断信号定义为所设辨识周期3/4内的综合判断结果。即在本文所设的逆变频率25 kHz下,当启动锅具位置辨识策略时,在20个所设逆变频率25 kHz周期内,判断超过15个周期的相位低于所设阈值相位即判断锅具处于该感应加热线圈上;反之,不在。即0.8 ms为辨识的响应时间。系统总体辨识响应时间为0.8n ms。
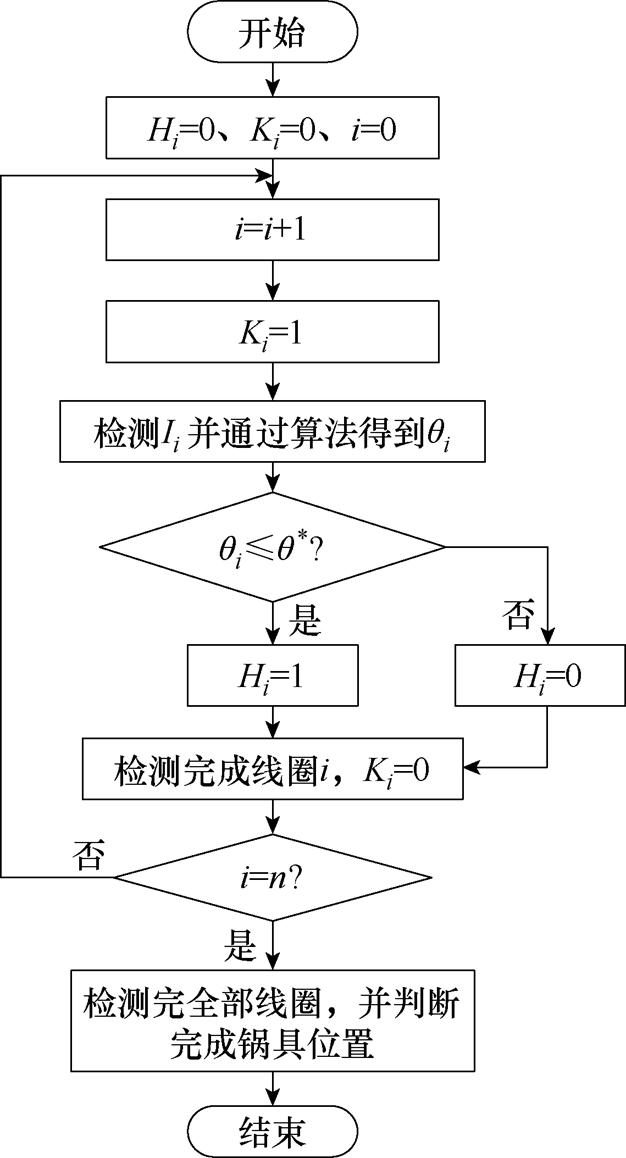
图8 锅具辨识策略流程
Fig.8 Flowchart of pot identification strategy
 为锅具所在感应加热线圈的临界位置的相位阈值,根据上述推理及图6所述,在以谐振网络Cn以锅具正对感应加热线圈谐振时,判断锅具处于感应加热线圈上的锅具相位范围为[0°, 30°
为锅具所在感应加热线圈的临界位置的相位阈值,根据上述推理及图6所述,在以谐振网络Cn以锅具正对感应加热线圈谐振时,判断锅具处于感应加热线圈上的锅具相位范围为[0°, 30° ,即该感应加热线圈支路电流相位q <30°,即锅具处于该感应加热线圈上;反之,不在。
,即该感应加热线圈支路电流相位q <30°,即锅具处于该感应加热线圈上;反之,不在。
感应加热线圈巡检策略如图9所示,检测并判断各支路电流相位及判断锅具位置,其中采集各感应加热线圈支路电流in并经过运算得到相位qn,然后和所设相位阈值比较得到Hn,以此得到全部支路的Hn信号来判断锅具位置并采用继电器Kn控制感应加热线圈的开断,即锅具处于线圈n上开通Kn;反之,关断,即开关状态代表各继电器的开通状态。判断准则、锅具位置及继电器开关状态对应准则见表1。
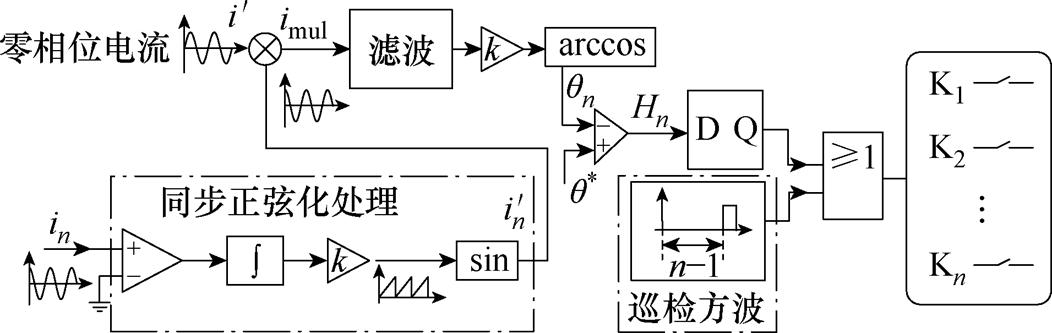
图9 感应加热线圈巡检策略
Fig.9 Control strategy of inductive heating coil routing inspection
表1 锅具位置识别和开关状态准则
Tab.1 Criterion of position identification and switch state of pot
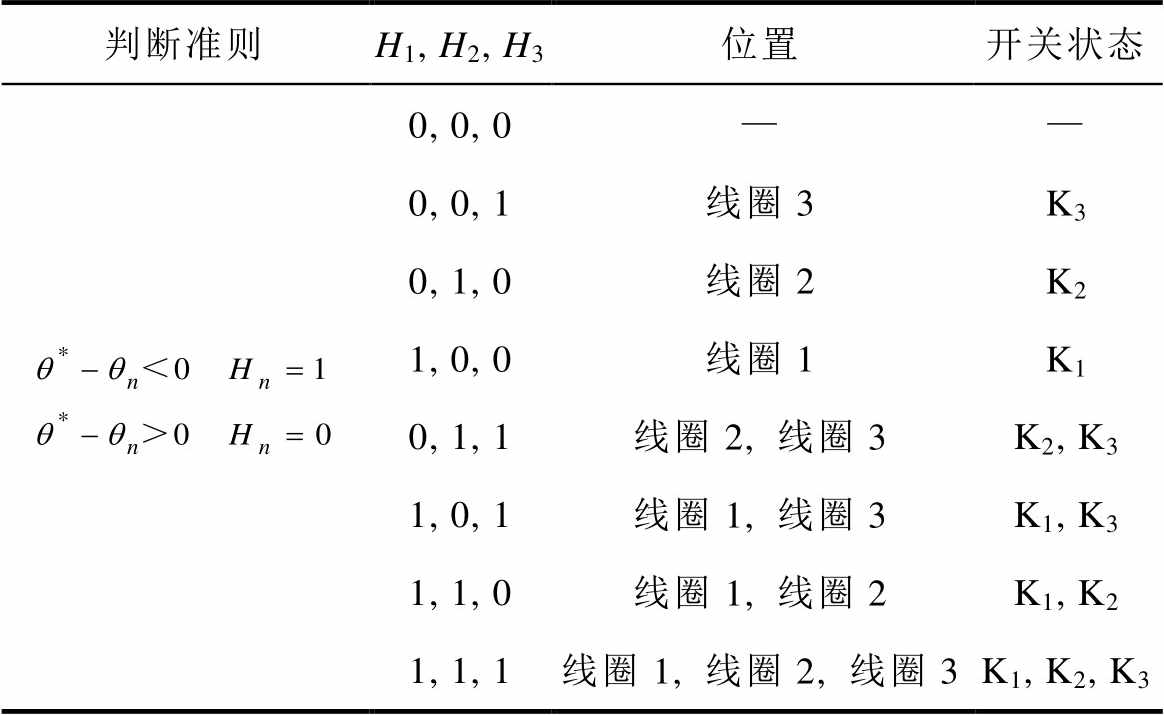
判断准则H1,H2,H3位置开关状态 0,0,0—— 0,0,1线圈3K3 0,1,0线圈2K2 1,0,0线圈1K1 0,1,1线圈2,线圈3K2,K3 1,0,1线圈1,线圈3K1,K3 1,1,0线圈1,线圈2K1,K2 1,1,1线圈1,线圈2,线圈3K1,K2,K3
由第1节分析可知,M随锅具与感应加热线圈位置的偏移距离d的增大呈减小趋势,意味着锅具位置的情况会影响感应加热线圈之路的电流有效值和功率大小。
在输入电压和锅具位置已确定的情况下,由式(1)~式(3)可知,此时在相应的偏移距离d下互感M已确定,可以通过改变补偿网络调节输入阻抗中的感抗部分进而调节电流有效值和功率的大小。因此可以运用可调电容电路来进行功率调节,使得各线圈支路电流达到最大,以此提高加热速度和功率。可调电容结构主体由电容Cs和两个反向串联的开关管并联而成,其中a 为控制信号的导通角,满足 ,对于其参数的设计,还应该保证可调电容值范围大于所需补偿电容的范围值。为满足锅具加热的调节且不会产生过大的电流,设计Cs=794.6 nF,根据文献[32]可得,可调电容与线圈补偿网络中Ceq等效电容大小可表示为
,对于其参数的设计,还应该保证可调电容值范围大于所需补偿电容的范围值。为满足锅具加热的调节且不会产生过大的电流,设计Cs=794.6 nF,根据文献[32]可得,可调电容与线圈补偿网络中Ceq等效电容大小可表示为
 (5)
(5)
结合式(5)可以推导得到功率调节后的电流如式(6)所示,功率[33]如式(7)所示。
 (6)
(6)
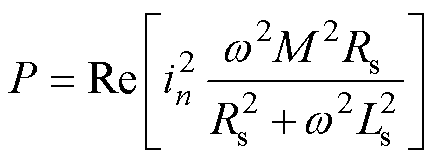 (7)
(7)
由于自由区电磁炉的特性,会出现判断锅具处于两个及以上感应加热线圈上,感应加热线圈产生交叉互感现象,因此需要分析交叉互感现象。为简化分析过程,以锅具处于线圈m和线圈q为例,若锅具处于多个感应加热线圈之间分析过程相似,交叉互感等效电路如图10所示。
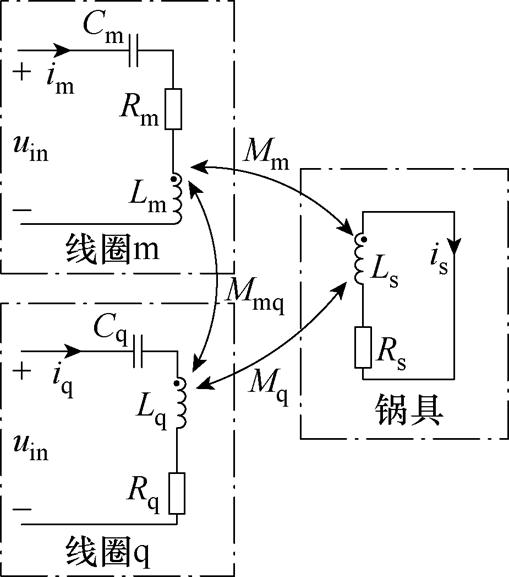
图10 感应加热线圈之间的交叉互感等效电路
Fig.10 Equivalent circuit diagram of mutual inductance between induction heating coils
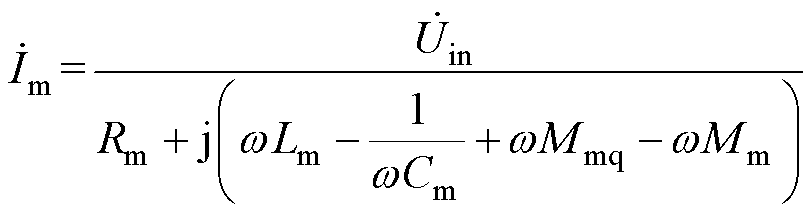
由电路理论可推导电压电流回路方程,其中分析线圈m的电流 表示为
表示为
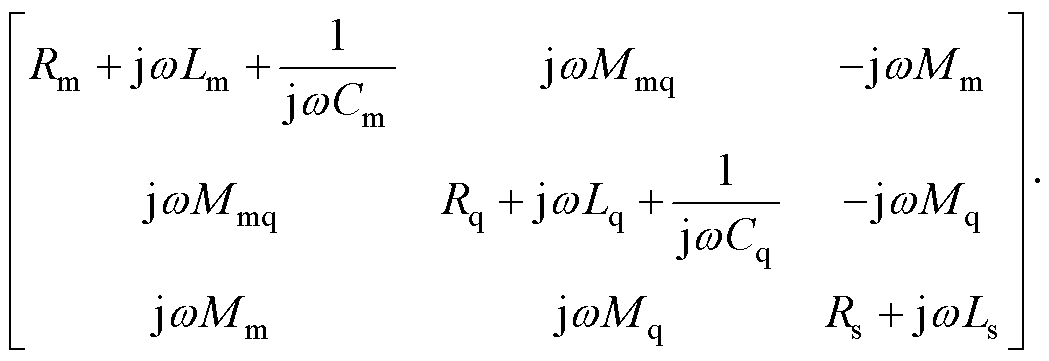
 (8)
(8)
 (9)
(9)
线圈q的电流 同理,对比式(6),可以看出交叉互感Mmq会影响支路电流的大小,锅具不同偏移情况下感应加热线圈之间的交叉互感如图11所示。
同理,对比式(6),可以看出交叉互感Mmq会影响支路电流的大小,锅具不同偏移情况下感应加热线圈之间的交叉互感如图11所示。
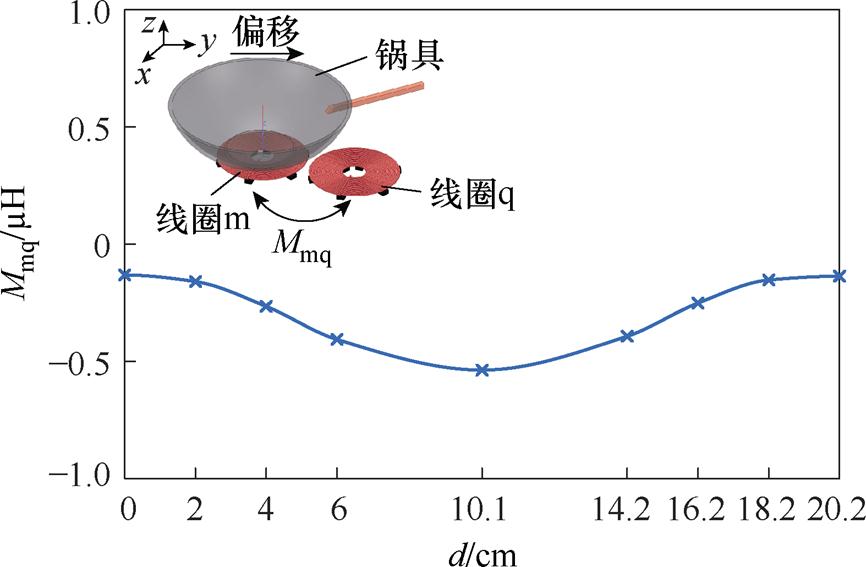
图11 偏移距离d和交叉互感Mmq的变化趋势
Fig.11 Variation trend of misalignment distance d and mutual inductance Mmq of pot
由式(9)考虑感应加热线圈之间的交叉互感后的电流分析可知,在多个感应加热线圈同时工作的情况下,基于可调电容电路的功率调节策略同样适用,通过调节阻抗中的感抗部分进而调节电流有效值和功率的大小,固而式(9)可改写为
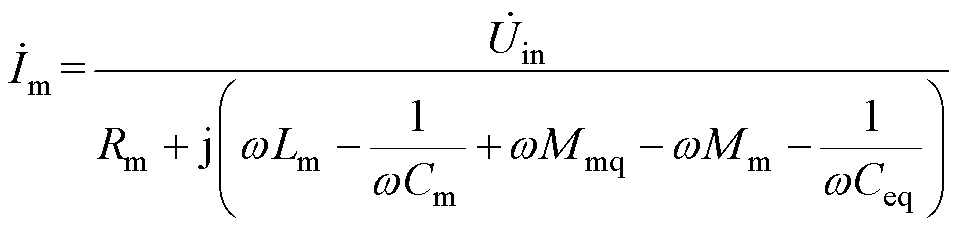 (10)
(10)
由式(5)和式(6)可以看出,通过控制a 改变Ceq的大小使得电流 达到最大值。这意味着,可以通过搜索的最大值点来寻找a 的最佳值,以此在锅具位置偏移的情况下,提高电流有效值和功率的大小。根据上述多感应加热线圈同时工作时产生的交叉互感现象,由式(10)可以看出,功率调节策略同样适用。图12所示为功率调节控制策略,功率调节策略与位置辨识策略相互协调,即进行锅具位置辨识时,巡检方波为高电平,经过运算输出高电平给可调电容电路,此时可调电容电路的两个开关管同时闭合,即不经过Cs,功率调节策略关闭。当辨识锅具处于该感应加热线圈支路时进行功率调节,通过电流最大值搜索,得到可调电容的导通角a,控制开关电容的大小以此来实现功率调节。根据Hn信号闭合感应加热线圈支路实现锅具的加热,并使得锅具所在感应加热线圈支路的同时进行功率调节策略提高各支路电流有效值,以此提高功率。当锅具处于多个感应加热线圈时,各支路经过功率调节策略同时工作。
达到最大值。这意味着,可以通过搜索的最大值点来寻找a 的最佳值,以此在锅具位置偏移的情况下,提高电流有效值和功率的大小。根据上述多感应加热线圈同时工作时产生的交叉互感现象,由式(10)可以看出,功率调节策略同样适用。图12所示为功率调节控制策略,功率调节策略与位置辨识策略相互协调,即进行锅具位置辨识时,巡检方波为高电平,经过运算输出高电平给可调电容电路,此时可调电容电路的两个开关管同时闭合,即不经过Cs,功率调节策略关闭。当辨识锅具处于该感应加热线圈支路时进行功率调节,通过电流最大值搜索,得到可调电容的导通角a,控制开关电容的大小以此来实现功率调节。根据Hn信号闭合感应加热线圈支路实现锅具的加热,并使得锅具所在感应加热线圈支路的同时进行功率调节策略提高各支路电流有效值,以此提高功率。当锅具处于多个感应加热线圈时,各支路经过功率调节策略同时工作。
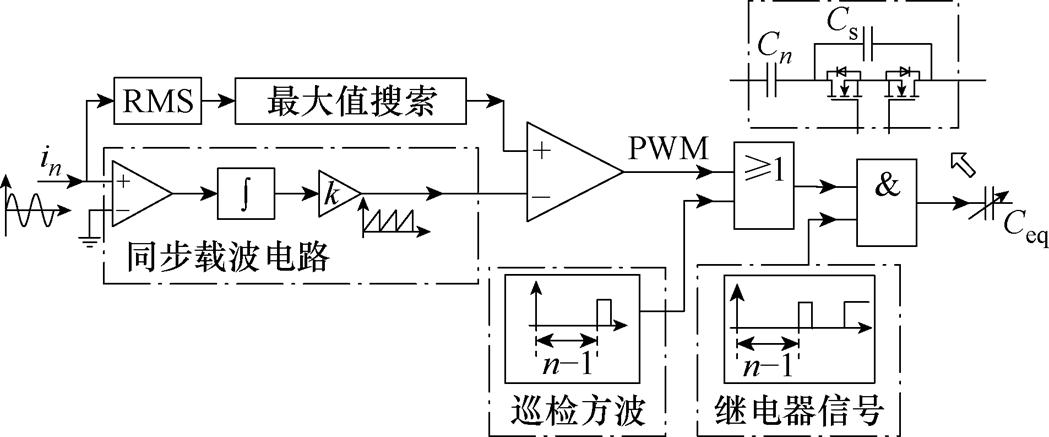
图12 功率调节控制策略
Fig.12 Control strategy of power regulation
由于所设自由区各感应加热线圈并联连接,所以各支路电流互不影响且控制策略相同,系统总体控制策略如图13所示,系统相关参数见表2。其中线圈结构如图1所示,感应加热线圈外径为16.4 cm,内径为4.5 cm,线径为2 mm,匝数为29匝,感应加热线圈间的间距为2.8 cm,铁氧体磁心6根规则对称摆放,长6.2 cm,宽1.4 cm,高0.8 cm。切换开关可以选择满足电压、电流及频率要求的MOSFET来实现支路的导通与关断。工程应用中为节省成本,本文选取的切换开关选择型号为JQC-3FF-S-Z的继电器组合摆放,继电器触发电流为2~4 mA,最大负载交流为250 V/10 A,所选择的继电器型号满足实验要求,能实现本文所提策略并实现锅具位置的定位加热。
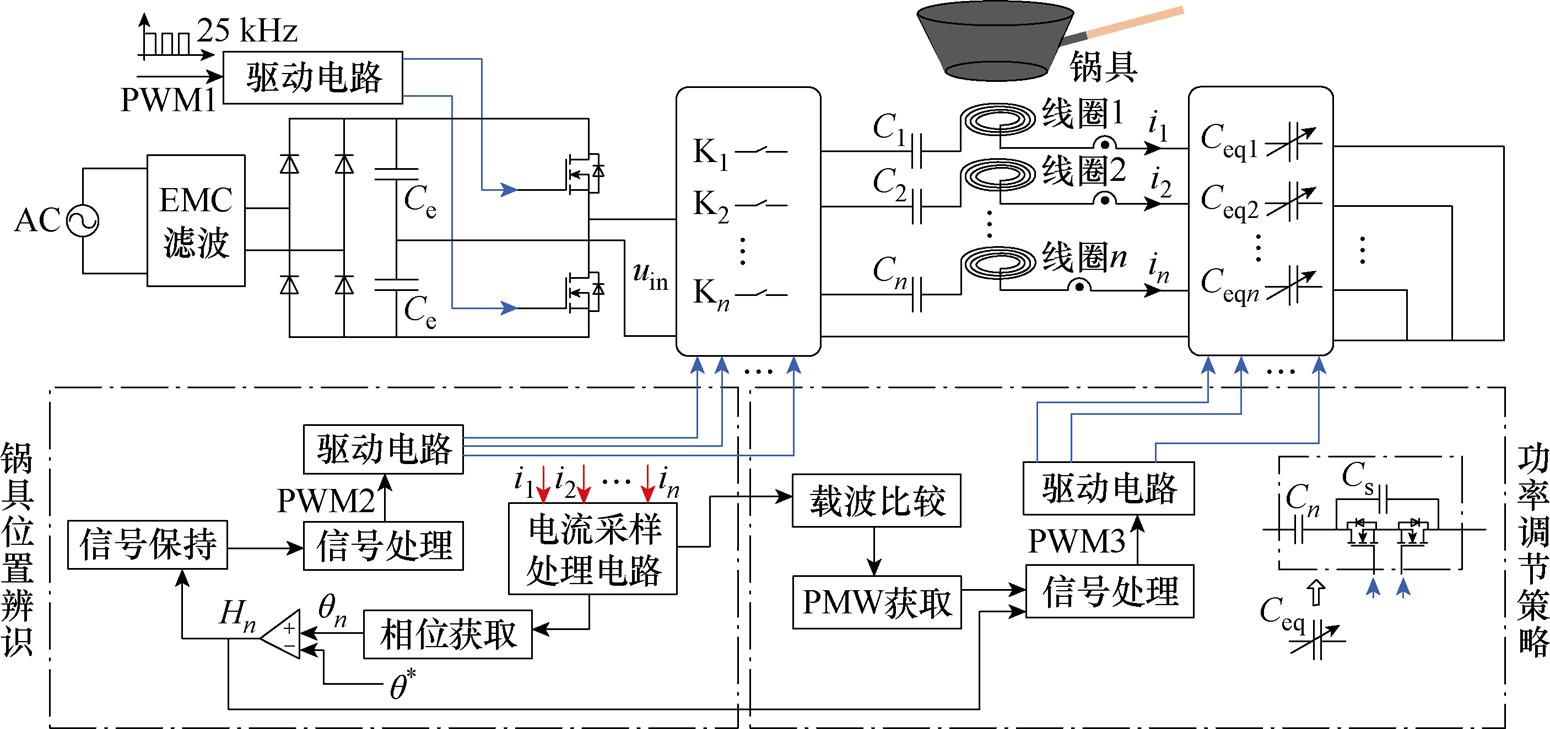
图13 自由区电磁炉系统结构
Fig.13 Structure diagram of free zone induction cooker system
表2 实验参数
Tab.2 Experimental parameters
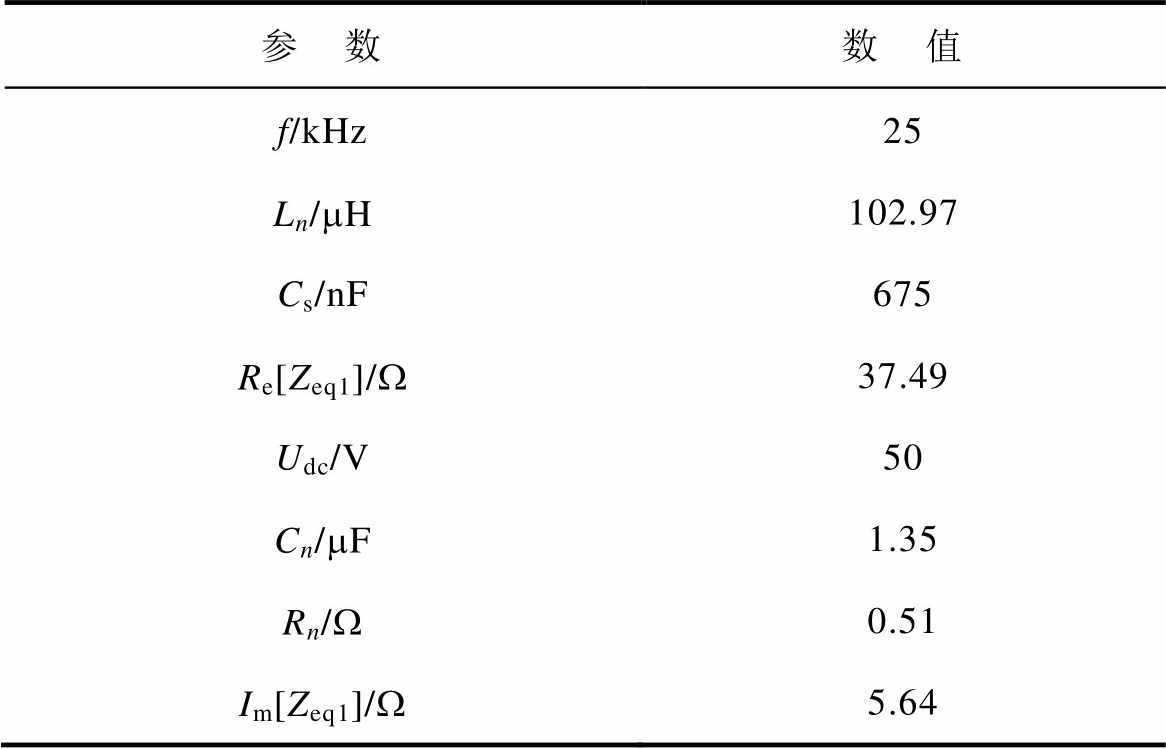
参 数数 值 f/kHz25 Ln/mH102.97 Cs/nF675 Re[Zeq1]/W37.49 Udc/V50 Cn/mF1.35 Rn/W0.51 Im[Zeq1]/W5.64
表2中,Re[Zeq1]、Im[Zeq1]为锅具正对线圈时的等效阻抗和感抗。
为验证所提锅具位置辨识及功率调节策略的有效性,基于FPGA搭建了最小三线圈自由区电磁炉实验平台如图14所示。
首先验证锅具处于单感应加热线圈不同位置情况下锅具位置辨识策略的正确性,由于感应加热线圈为圆形结构,因此,对于锅具在xy轴偏移时都可看为锅具中心距圆心在y轴偏移,定义d为沿y轴偏移距离,感应加热线圈与锅具相对位置分别为0 cm、3 cm、6 cm和12 cm偏移下进行实验验证,图15展现了锅具处于感应加热线圈不同位置时,逆变输出电压与电流的相位波形,从图中可以看出,锅具偏移距离d与仿真相位和实际相位q 吻合。

图14 自由区电磁炉实验平台
Fig.14 Experimental platform of free zone induction cooker
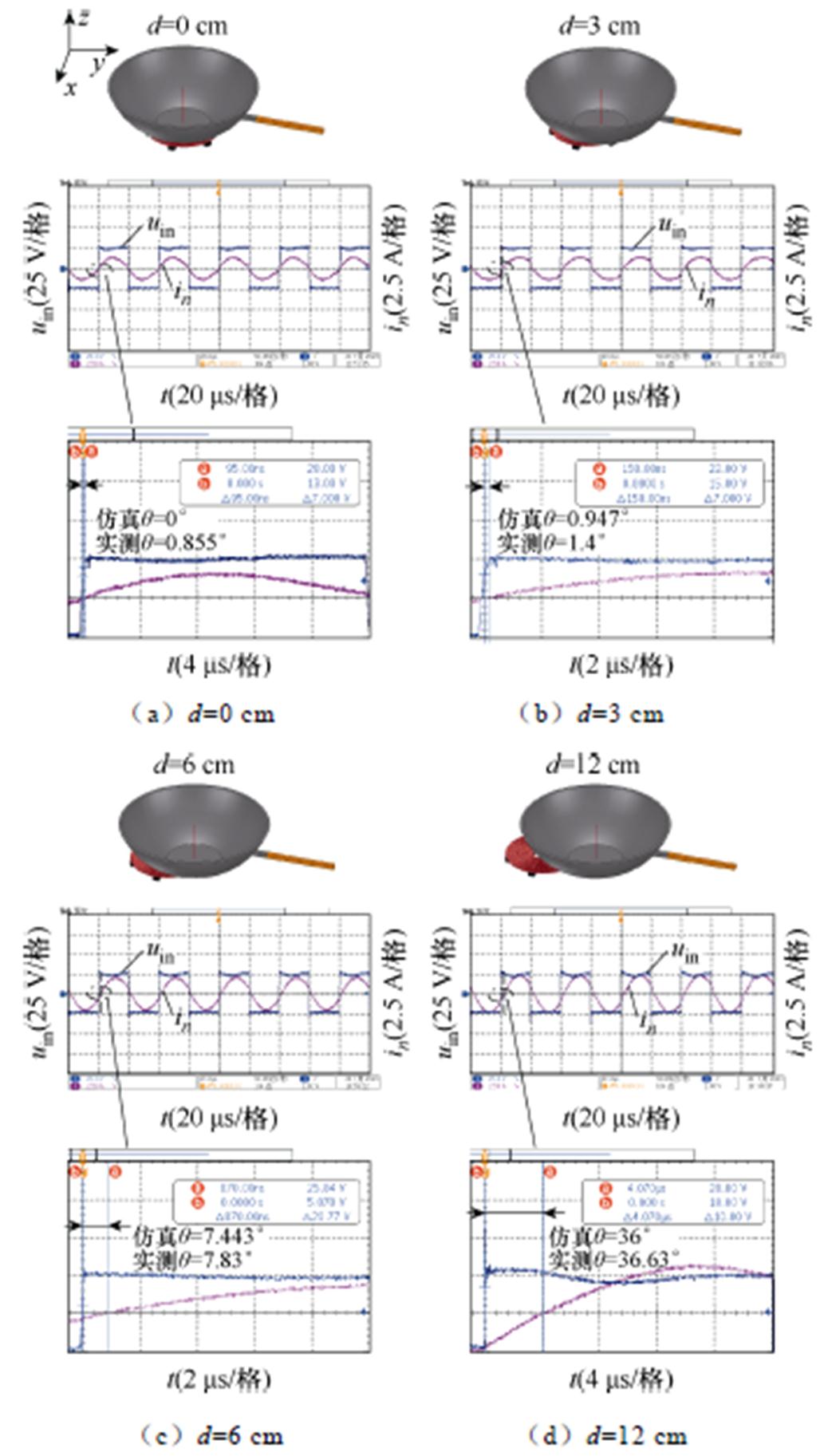
图15 锅具不同位置下相位实验波形
Fig.15 Phase experimental waveforms at different positions of the pot
图16为锅具处于以感应加热线圈o为圆心,偏移距离d为半径的不同旋转位置时的相位信息,将感应加热线圈位置对称划分为10个不同区域,验证了60组不同偏移距离d的相位信息,由于实际操作中偏移距离的不稳定性,因此会出现不同程度的距离误差,但不影响不同工况下仿真值和实测值的吻合性。

图16 不同位置辨识相位结果分析
Fig.16 Analysis diagram of different position identification phase results
由于锅具摆放位置的随机性,相位会出现一定的偏差,为验证锅具位置辨识策略的精度,定义位置辨识精度e 为实测相位和仿真相位的差值比相位阈值,即
 (11)
(11)
图17为锅具处于不同工况下辨识精度结果,从图中看出,最小精度为0.96,因此辨识精度大于96%。
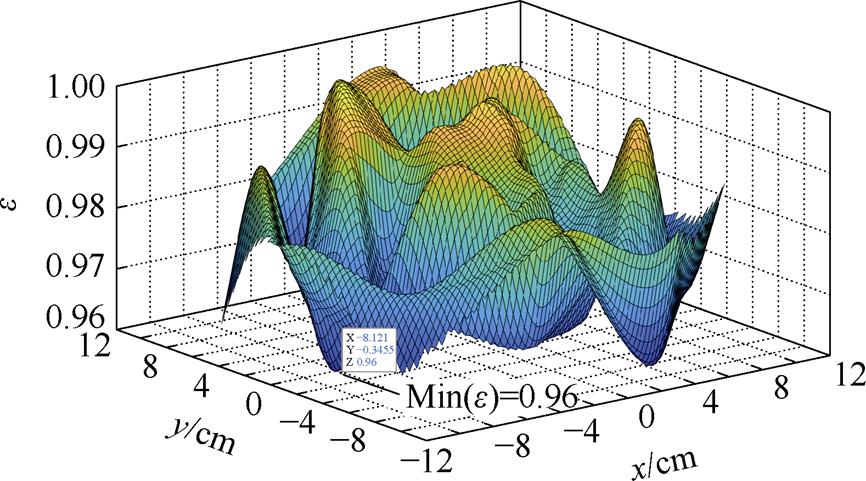
图17 不同位置辨识精度结果
Fig.17 Results of different position identification accuracy
由以上单感应加热线圈锅具位置正确性判断可知,自由区电磁炉中各感应加热线圈支路并联连接且采用单支路巡检策略,各支路相位互不影响,因此其锅具位置辨识策略适用于自由区电磁炉。在基于最小三线圈自由区电磁炉系统中定义r 为x轴方向偏移距离,d仍为y轴偏移距离。其中通过锅具位置辨识策略控制得到Hn信号供给继电器的导通和关断,自由区电磁炉系统锅具不同位置下相位实验波形如图18所示。从图18中看出,锅具在不同位置时的辨识情况,即各支路电流有不同的导通情况,锅具辨识于线圈n上即线圈n标记为√;反之,则为×。图18a为锅具在线圈1上,继电器信号H1H2H3=100,只有支路电流i1导通,其他支路断开;图18b为锅具在线圈3上,继电器信号H1H2H3=001,只有支路电流i3导通,其他支路断开;图18c为锅具在线圈2和线圈3上,继电器信号H1H2H3=011,支路电流i2和i3导通,线圈1支路断开;图18d为锅具在线圈1、线圈2和线圈3上,继电器信号H1H2H3= 111,支路电流i1、i2和i3全部导通。从实验结果可以看出,锅具位置辨识正确,且能根据锅具所在位置进行锅具的定位加热,验证了最小三线圈自由区电磁炉系统中锅具位置辨识策略的正确性。
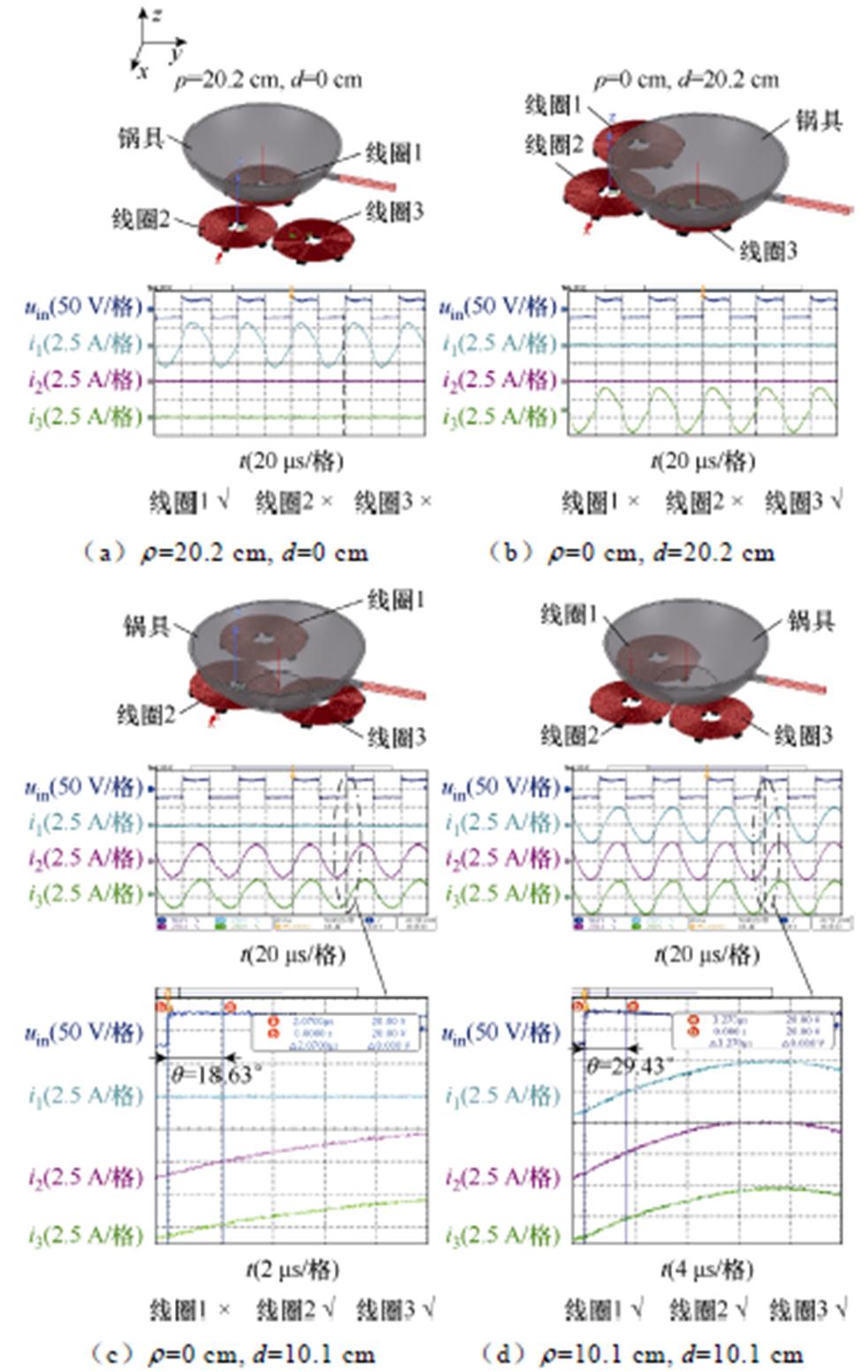
图18 自由区电磁炉系统锅具不同位置下相位实验波形
Fig.18 Phase experimental waveforms of free zone induction cooker system at different pot positions
为验证所提功率调节策略在锅具偏移情况下的有效性,对有无功率调节控制时系统的工作情况进行了实验对比。在辨识为锅具处于该感应加热线圈支路时启动功率调节策略,在感应加热线圈相对位置分别为d=7 cm,r=0 cm和d=11 cm,r=0 cm两种偏移工况下进行了实验验证,结果如图19所示。可以看出,锅具偏移工况导致了系统逆变输出端电压电流具有相位差,系统失谐。同时,进行功率调节后的系统不仅逆变输出电压与电流达到无相位差,且电流达到最大值,系统达到谐振状态。所提功率调节策略能够保持锅具与感应加热线圈偏移工况下整个系统的谐振状态,提升了电流有效值,进而提高了功率,实验结果验证了锅具与感应加热线圈偏移工况下功率调节策略的有效性。

图19 自由区电磁炉系统锅具偏移下功率调节前后电流电压波形
Fig.19 Current and voltage waveforms before and after power regulation of free zone induction cooker system under pot misalignment
为验证本文所提自由区电磁炉系统锅具偏移情况下的加热性能,在输入电压50 V,锅具与感应加热线圈相对位置d=10.1 cm,r=0 cm情况下,对3 min内锅具有无功率调节的温升进行实验对比如图20所示。从图20中可以看出,每分钟内功率调节后的锅具最高温度较功率调节前均有所提升,3 min时其最高温度提升了17.3℃,验证了功率调节策略的有效性,即在相同时间内功率调节策略可以提高锅具偏移工况下的加热速度。
近年来,针对自由区电磁炉提出了不同的锅具位置辨识方法,表3展示了本文提出的方法与先前的方法之间的综合比较。
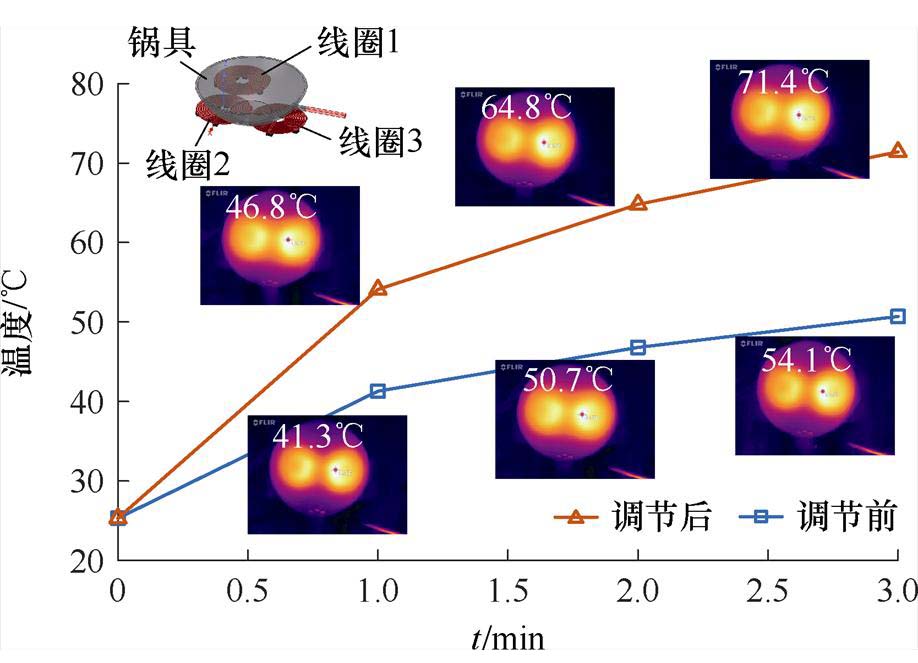
图20 自由区电磁炉系统功率调节前后温升对比
Fig.20 Comparison diagram of temperature rise before and after power regulation of free zone induction cooker system
表3 与已有文献的方法对比
Tab.3 Comparison with previous works
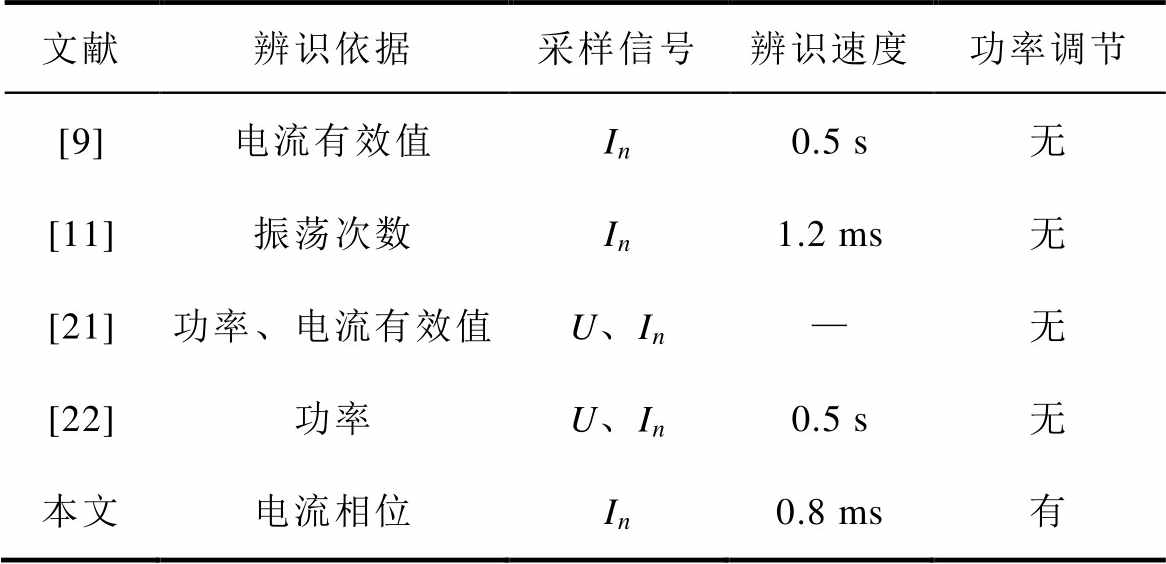
文献辨识依据采样信号辨识速度功率调节 [9]电流有效值In0.5 s无 [11]振荡次数In1.2 ms无 [21]功率、电流有效值U、In—无 [22]功率U、In0.5 s无 本文电流相位In0.8 ms有
与文献[9, 11, 21-22]进行对比,本文提出的创新点为根据电路等效模型推导出了锅具和感应加热线圈M对系统阻抗和电流的影响,通过Maxwell仿真验证了锅具和感应加热线圈的偏移距离d对M的变化影响,提出了基于电流相位检测的自由区电磁炉锅具位置辨识策略,在锅具偏移情况下进行功率调节策略以提高功率和加热速度。综上所述,本文提出的基于相位辨识锅具位置的方法具有辨识速度快、精度高的优点,针对锅具位置偏移的工况,功率调节策略有效提高了锅具的加热速度。此外,控制策略仅需要采样电流,简化了采样电路。
本文针对实际应用中自由区电磁炉锅具位置辨识速度慢和准确性低的问题以及锅具偏移下对功率和加热速度的不利影响,提出了一种基于电流检测的自由区电磁炉锅具位置辨识策略及功率调节策略。研究结果表明:所提锅具辨识策略在单感应加热线圈和最小三线圈自由区电磁炉系统中,在锅具不同位置情况下,均能够快速正确地辨识锅具的实际位置,进而验证了锅具位置辨识策略的有效性。所提功率调节策略与锅具位置辨识策略相协调,根据锅具检测结果对相应的感应加热线圈支路进行功率调节控制,在相同时间内功率和最高温度提升明显,验证了功率调节策略的有效性。由于本文的功率调节考虑的是偏移工况下电磁炉仍能保证最大功率输出,因此在后续研究中可以考虑结合可调电容电路的功率调节策略实现自由区电磁炉不同工况下最大功率内的恒功率输出。
参考文献
[1] 涂彦昕, 梅红伟, 刘立帅, 等. 基于动态扫描涡流热成像技术的碳钢结构损伤检测[J]. 电工技术学报, 2023, 38(11): 2999-3008.
Tu Yanxin, Mei Hongwei, Liu Lishuai, et al. Damage detection of carbon steel structure based on dynamic scanning eddy current thermal imaging technology[J]. Transactions of China Electrotechnical Society, 2023, 38(11): 2999-3008.
[2] 张文峰, 姜永将, 张晓红, 等. 一种双C型高温超导直流感应加热装置及其性能分析[J]. 电工技术学报, 2021, 36(增刊2): 444-450.
Zhang Wenfeng, Jiang Yongjiang, Zhang Xiaohong, et al. A double-C high-temperature superconducting DC induction heater and analysis of its perfor- mance[J]. Transactions of China Electrotechnical Society, 2021, 36(S2): 444-450.
[3] Sarnago H, Lucía Ó, Pérez-Tarragona M, et al. Dual-output boost resonant full-bridge topology and its modulation strategies for high-performance induction heating applications[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3554-3561.
[4] 张思彦, 陈为, 林甲深. 新型多相位多线圈激励感应加热电磁炉[J]. 电工电能新技术, 2016, 35(2): 44-47, 53.
Zhang Siyan, Chen Wei, Lin Jiashen. Induction cooker with novel multi-coils and multiphase excitations[J]. Advanced Technology of Electrical Engineering and Energy, 2016, 35(2): 44-47, 53.
[5] 李震, 郑海峰, 陈俊岐, 等. 基于磁感应联合加热的高压海缆工厂接头制备技术[J]. 电工技术学报, 2024, 39(3): 820-835.
Li Zhen, Zheng Haifeng, Chen Junqi, et al. Manu- facturing technology of high-voltage submarine cable factory joint based on magnetic induction combined heating[J]. Transactions of China Electrotechnical Society, 2024, 39(3): 820-835.
[6] 冷朝霞, 刘庆丰. 基于多电平逆变器的感应加热双频率输出设计[J]. 电工技术学报, 2016, 31(24): 195- 204.
Leng Zhaoxia, Liu Qingfeng. Design of dual frequency output of induction heating based on multilevel inverter[J]. Transactions of China Electro- technical Society, 2016, 31(24): 195-204.
[7] 李成祥, 沈婷, 吴浩, 等. 平板集磁器结构对涡流分布与集磁效果的影响规律[J]. 电工技术学报, 2023, 38(15): 4087-4096.
Li Chengxiang, Shen Ting, Wu Hao, et al. Influence of the structure parameters of the flat field shaper on the eddy current distribution and magnetic con- centration effect[J]. Transactions of China Electro- technical Society, 2023, 38(15): 4087-4096.
[8] Lucia O, Acero J, Carretero C, et al. Induction heating appliances: toward more flexible cooking surfaces[J]. IEEE Industrial Electronics Magazine, 2013, 7(3): 35-47.
[9] Öztürk M, Oktay U, Yılmaz N, et al. Comparison of pan detection methods for single switch topology used in domestic induction cooking[C]//2020 International Conference on Smart Energy Systems and Tech- nologies (SEST), Istanbul, Turkey, 2020: 1-6.
[10] Gambhir A, Mishra S. Control algorithm for a zone- less induction cooktop[C]//2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 2016: 1-5.
[11] Wang Zhihui, Li Yupeng, Sun Yue, et al. Load detection model of voltage-fed inductive power transfer system[J]. IEEE Transactions on Power Electronics, 2013, 28(11): 5233-5243.
[12] 曹稳坤. 基于STM32微控制器的自由感应加热控制技术研究[D]. 成都: 电子科技大学, 2016.
Cao Wenkun. Research on free induction heating control technology based on STM32 micro- controller[D]. Chengdu: University of Electronic Science and Technology of China, 2016.
[13] 陈为美. 基于FPGA自由感应加热智能控制技术研究[D]. 成都: 电子科技大学, 2016.
Chen Weimei. Research on intelligent control technology of free induction heating based on FPGA[D]. Chengdu: University of Electronic Science and Technology of China, 2016.
[14] 刘方舟, 李玉玲, 高宏. 基于电流相位的多负载电磁炉锅具检测方法[J]. 电工技术, 2021(23): 14-17.
Liu Fangzhou, Li Yuling, Gao Hong. Detection method of multi-load induction cooker based on current phase[J]. Electric Engineering, 2021(23): 14-17.
[15] 张献, 邢子瑶, 薛明, 等. 无线电能传输系统异物检测技术研究综述[J]. 电工技术学报, 2022, 37(4): 793-807.
Zhang Xian, Xing Ziyao, Xue Ming, et al. Overview of foreign object detection in wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 793-807.
[16] 苏玉刚, 侯信宇, 戴欣. 磁耦合无线电能传输系统异物检测技术综述[J]. 中国电机工程学报, 2021, 41(2): 715-727.
Su Yugang, Hou Xinyu, Dai Xin. Review of foreign object detection technology in magnetic coupling wireless power transfer system[J]. Proceedings of the CSEE, 2021, 41(2): 715-727.
[17] Jafari H, Moghaddami M, Sarwat A I. Foreign object detection in inductive charging systems based on primary side measurements[J]. IEEE Transactions on Industry Applications, 2019, 55(6): 6466-6475.
[18] Jeong S Y, Thai V X, Park J H, et al. Self- inductance-based metal object detection with mistuned resonant circuits and nullifying induced voltage for wireless EV chargers[J]. IEEE Transactions on Power Electronics, 2019, 34(1): 748-758.
[19] 苏文博, 王维, 吕晓飞, 等. 含金属异物的无线充电系统场域等效建模分析[J]. 电力工程技术, 2023, 42(3): 226-232, 249.
Su Wenbo, Wang Wei, Lü Xiaofei, et al. Field equivalent modeling analysis of wireless charging system with metal foreign objects[J]. Electric Power Engineering Technology, 2023, 42(3): 226-232, 249.
[20] Sun Ying, Song Kai, Zhou Tian, et al. A shared method of metal object detection and living object detection based on the quality factor of detection coils for electric vehicle wireless charging[J]. IEEE Trans- actions on Instrumentation and Measurement, 2023, 72: 9002517.
[21] Lucia O, Navarro D, Guillén P, et al. Deep learning- based magnetic coupling detection for advanced induction heating appliances[J]. IEEE Access, 2019, 7: 181668-181677.
[22] Park S M, Noh Y S, Hyon B J, et al. Control strategy of resonant load identification for free zone induction heating systems with WBG-based multiple inverters[C]// 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 2021: 2145-2149.
[23] Bono-Nuez A, Martin-del-Brio B, Bernal-Ruiz C, et al. The inductor as a smart sensor for material identification in domestic induction cooking[J]. IEEE Sensors Journal, 2018, 18(6): 2462-2470.
[24] Qais M H, Loo K H, Liu J, et al. Least mean square-based fuzzy C-means clustering for load identification of induction heating[J]. IEEE Transa- ctions on Instrumentation and Measurement, 2022, 71: 1-10.
[25] Kamaeguchi K, Umetani K, Hiraki E. Application of automatic resonant frequency tuning circuit to induction heating system[C]//2018 20th European Conference on Power Electronics and Applications (EPE'18 ECCE Europe), Riga, Latvia, 2018: 1-9.
[26] 王启涵, 姚缨英, 陈卫宝. 电磁感应加热中加热物体位置的选择[J]. 电工技术学报, 2011, 26(6): 160- 165.
Wang Qihan, Yao Yingying, Chen Weibao. Selection of heating object’s position in electromagnetic indu- ction heating[J]. Transactions of China Electro- technical Society, 2011, 26(6): 160-165.
[27] Han Wei, Chau K T, Jiang Chaoqiang, et al. All-metal domestic induction heating using single-frequency double-layer coils[J]. IEEE Transactions on Mag- netics, 2018, 54(11): 8400705.
[28] Im S H, Kim J S, Jang Y S, et al. Design of ferrite core for the improvement of power efficiency in induction range[J]. IEEE Transactions on Magnetics, 2019, 55(6): 8001304.
[29] Lope I, Acero J, Carretero C. Analysis and optimi- zation of the efficiency of induction heating applications with litz-wire planar and solenoidal coils[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 5089-5101.
[30] Lucia O, Burdio J M, Millan I, et al. Load-adaptive control algorithm of half-bridge series resonant inverter for domestic induction heating[J]. IEEE Transactions on Industrial Electronics, 2009, 56(8): 3106-3116.
[31] Carretero C, Acero J, Alonso R, et al. Modeling mutual impedances of loaded non-coaxial inductors for induction heating applications[J]. IEEE Transa- ctions on Magnetics, 2008, 44(11): 4115-4118.
[32] Hu Zhiyuan, Qiu Yajie, Wang Laili, et al. An interleaved LLC resonant converter operating at constant switching frequency[C]//2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 2012: 3541-3548.
[33] Aoyama M, Thimm W, Knoch M, et al. Proposal and challenge of halbach array type induction coil for cooktop applications[J]. IEEE Open Journal of Industry Applications, 2021, 2: 168-177.
Abstract In order to realize the freedom of placing pots, the free zone induction cooker with multiple induction heating coils is gradually developing. It can perform user-customized heating of different pots, greatly improving the flexibility of using the induction cooker. In actual work, the induction heating coil in the corresponding area needs to be triggered based on the real-time position. Therefore, the correct identification of the pot position affects the working status and heating performance of the free zone induction cooker system. As a result, pot position identification has become a key factor that needs to be solved urgently. Traditional pot position identification methods are easily affected by fluctuations in external factors, require a large amount of sample data, and need to improve the accuracy and speed of pot position identification. This paper indicates that the misalignment of the pot affects the mutual inductance M between the pot and the induction heating coil, thereby affecting the impedance and current phase of the system. An identification method is proposed using the current phase to control the switch array, which achieves positioning and heating of the pot.The proposed pot position identification strategy requires a small amount of sample data, and the branch current phase is only related to the position of the pot. It is not easily affected by system voltage and current fluctuations, so the position of the pot can be judged in real-time.
Secondly, regarding the impact of pot misalignment on current and power, this paper introduces a power regulation strategy based on an adjustable capacitor circuit. Under the misaligned working condition of the pot, the disturbance observation method of maximum current search is used to adaptively adjust the adjustable capacitor. The maximum power output of the induction cooker is obtained, and the heating speed of the pot is improved. The pot position identification strategy and the power regulation strategy coordinate to ensure accurate identification of the pot position and rapid heating, which only needs to collect the current information of the system branch. Thus, the sampling circuit is simplified.
Finally, an experimental prototype of a free zone induction cooker based on three coils was built. Experimental results show that in the pot position identification strategy, the accuracy of the theoretical and experimental phases is over 96%, and the identification speed is 0.8 ms. The maximum temperature rise within three minutes is 17.3℃ using the power regulation strategy, higher than without the power regulation strategy. The proposed pot position identification strategy can correctly identify the exact position of the pot and achieve the maximum power output of the induction cooker after the power regulation strategy. The correctness of the pot position identification strategy and the power regulation strategy are verified.
Keywords:Free zone, induction cooker, pot position identification, power regulation
中图分类号:TM924.01
DOI: 10.19595/j.cnki.1000-6753.tces.240421
收稿日期 2024-03-18
改稿日期 2024-04-22
王 博 男,1999年生,硕士研究生,研究方向为无线电能传输、电磁感应加热。
E-mail: wang1224651810@163.com
谭平安 男,1979年生,教授,硕士生导师,研究方向为无线电能传输、电力电子系统与控制等。
E-mail: tanpingan@126.com(通信作者)
(编辑 陈 诚)