 和
和 、
、 和
和 以及
以及 和
和 分别为PCC电压、交流电流以及环流在控制器dq坐标系中的d、q轴分量;
分别为PCC电压、交流电流以及环流在控制器dq坐标系中的d、q轴分量; 和
和 以及
以及 和
和 分别为交流电流和环流控制的参考值。W 为同步角频率,q 为PLL输出相位。eabc和ecabc分别为基频电流控制(Fundamental Frequency Current Control, FFCC)和CCSC的输出调制信号。mpabc和mnabc分别为上、下桥臂的开关函数。
分别为交流电流和环流控制的参考值。W 为同步角频率,q 为PLL输出相位。eabc和ecabc分别为基频电流控制(Fundamental Frequency Current Control, FFCC)和CCSC的输出调制信号。mpabc和mnabc分别为上、下桥臂的开关函数。摘要 在弱电网条件下,电网阻抗与锁相环(PLL)耦合效应会引起并网模块化多电平换流器(MMC)系统失稳,对电力系统的安全运行产生威胁。该文提出结合系统等效环路增益零极点和频域特性的稳定性分析方法,揭示弱电网下并网MMC系统失稳的根本原因。首先,构建包含MMC内部动态特性的等效环路增益模型,该模型刻画了电网阻抗与PLL耦合效应和复杂控制系统之间的交互作用。其次,提出结合系统等效环路增益零极点和频域特性的稳定性分析方法,分析结果表明,电网阻抗与PLL耦合效应在系统等效环路增益中引入右半平面极点,这将破坏系统的稳定性;通过增加基频电流控制的增益可以缓解这种潜在的失稳问题,但要彻底消除电网阻抗与PLL耦合效应引起的失稳问题,需要设计相应的环路补偿方案。最后,实验结果验证了理论分析的正确性以及消除电网阻抗与PLL耦合效应从而改善并网MMC系统稳定性方法的有效性。
关键词:弱电网 模块化多电平换流器(MMC) 电网阻抗 锁相环(PLL) 耦合效应 稳定性
模块化多电平换流器(Modular Multilevel Con- verter, MMC)具有功率损耗低、模块化程度高、可扩展性强和输出电压谐波含量低等显著优势[1-3],是快速发展的高压直流输电和高渗透率可再生能源发电技术中最具有发展前景的拓扑方案之一。近年来,MMC在柔性直流输电、异步电网互联和中压直流配电系统等领域均得到迅速发展[4-7]。然而,在弱电网条件下,采用锁相环(Phase-Locked Loop, PLL)同步的并网MMC系统的小信号稳定性问题日益突出[8-10],由PLL引起的次/超同步振荡问题逐渐成为制约可再生能源发电技术发展的重要因素之一。
近年来,国内外学者已经对采用PLL同步的电压源型变换器(Voltage Source Converter, VSC)与弱电网之间交互作用引起的稳定性问题进行了大量的研究。其中,文献[11]基于VSC的导纳模型分析发现,当VSC工作在逆变模式时,高带宽的PLL控制会破坏系统的稳定性。文献[12]指出高带宽的PLL引入宽频带范围的负电阻特征是引起并网VSC系统失稳的本质原因。然而,文献[11-12]在分析系统稳定性的过程中并没有将PLL效应从整体的阻抗模型中分离出来。为此,文献[13]利用基于PLL的单输入单输出传递函数模型,进一步解释了PLL与并网VSC系统其余部分之间交互作用造成的系统小信号同步失稳问题。文献[14]则基于并网VSC系统的开环传递函数模型,解释了在弱电网条件下PLL和电流内环之间交互作用引起电流控制环失稳的物理机理。但是,由于MMC固有的内部多频率分量之间交互耦合效应[15],并网MMC系统的建模和分析要比并网VSC系统更为复杂和困难,采用PLL同步的并网MMC系统的稳定性问题仍未得到深入研究。
MMC与VSC之间的差异在于MMC的桥臂间环流和子模块电容电压纹波相关的内部动态特 性[15-17],这些内部动态与交流侧和直流侧输出变量之间存在耦合效应[18-19]。精确模型是分析和解决采用PLL同步的并网MMC系统稳定性问题的重要前提。为了解决MMC建模的难题,文献[20]提出了基于动态相量的时域状态空间模型,并精确地考虑了MMC所有变量的动态;另一种有效的建模方法是基于多谐波线性化的频域阻抗模型[21],这种方法同样能够考虑MMC所有变量的动态。文献[22]证明了这两种建模方法[20-21]在MMC接入系统中应用的等效性。然而,采用多谐波线性化方法建立的模型具有阶数较高的特点,难与控制系统结合来分析并网MMC系统的稳定性问题。文献[23]建立了MMC交流侧的小信号阻抗模型,并利用基于系统最小环路增益的Nyquist稳定性判据分析了并网MMC系统的稳定性,发现采用合适的环流抑制控制(Circulating Current Suppression Control, CCSC)能够显著改善并网MMC系统的稳定性。文献[24]建立了基于动态相量的柔性直流输电系统的高频状态空间模型,并分析了系统的谐波稳定性以及引起高频振荡的关键因素。但是,在弱电网条件下,电网阻抗与PLL耦合效应与宽频带控制系统之间的交互作用对并网MMC系统稳定性的影响机制尚不清晰。
针对现有研究存在的不足,本文构建了并网MMC系统的等效环路增益模型,在此基础上提出结合系统等效环路增益零极点和频域特性的稳定性分析方法,分析了弱电网下电网阻抗与PLL耦合效应与宽频带控制系统之间的交互作用对并网MMC系统稳定性的影响机制。首先,构建了考虑电网阻抗与PLL耦合效应的并网MMC系统的小信号传递函数框图与等效环路增益模型;其次,通过等效环路增益模型的零极点和频域特性揭示了电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制,并提出消除电网阻抗与PLL耦合效应来改善并网MMC系统稳定性的方法;最后,RT-Lab控制器硬件在环(Hardware in the Loop, HIL)实验验证了理论分析的正确性。
本节首先介绍了并网MMC系统的拓扑结构,采用abc坐标系中的共模信号和差模信号表示法描述了MMC内部动态的数学关系。然后,通过坐标变换建立了dq坐标系中可线性化的MMC时不变模型,用于推导并网MMC系统的小信号传递函数模型。
并网MMC系统的拓扑结构和小信号传递函数模型框图如图1所示。表1提供了并网MMC系统所使用的主要电路参数。图1a中,vgabc和vpabc分别是电网电压和公共耦合点(Point of Common Coupling, PCC)电压;Rg和Lg为交流电网的等效阻抗,RT和LT为变压器等效阻抗。iabc、icabc和Idc分别为交流输出电流、环流和直流电流;vabc为子模块电容电压提供支撑的MMC交流输出电压;Udc为直流电压。和、和以及和分别为PCC电压、交流电流以及环流在控制器dq坐标系中的d、q轴分量;和以及和分别为交流电流和环流控制的参考值。W 为同步角频率,q 为PLL输出相位。eabc和ecabc分别为基频电流控制(Fundamental Frequency Current Control, FFCC)和CCSC的输出调制信号。mpabc和mnabc分别为上、下桥臂的开关函数。
图1b显示了dq坐标系中并网MMC系统的小信号传递函数模型框图,考虑了弱电网下电网阻抗与PLL耦合效应以及FFCC和CCSC的控制动态。其中, 和
和 分别为基频电流和环流的参考向量,
分别为基频电流和环流的参考向量, 和
和 分别为基频电流和环流向量,
分别为基频电流和环流向量, 和
和 分别为FFCC和CCSC输出调制信号向量,上标“s”和“c”分别代表系统dq坐标系和控制dq坐标系中的变量,
分别为FFCC和CCSC输出调制信号向量,上标“s”和“c”分别代表系统dq坐标系和控制dq坐标系中的变量, 为系统dq坐标系中PCC电压向量。“
为系统dq坐标系中PCC电压向量。“ ”表示变量或向量小信号扰动。Gc和Gcc分别为FFCC和CCSC的控制器传递函数矩阵。Zg为电网等效阻抗,Yo1和Yo2分别为PCC电压与基频电流和环流之间的等效导纳矩阵。
”表示变量或向量小信号扰动。Gc和Gcc分别为FFCC和CCSC的控制器传递函数矩阵。Zg为电网等效阻抗,Yo1和Yo2分别为PCC电压与基频电流和环流之间的等效导纳矩阵。 和
和 (x=1, 2)为PLL与调制信号和电流之间的耦合矩阵;
(x=1, 2)为PLL与调制信号和电流之间的耦合矩阵; (y=1, 2)为调制信号到电流和环流的传递函数。
(y=1, 2)为调制信号到电流和环流的传递函数。
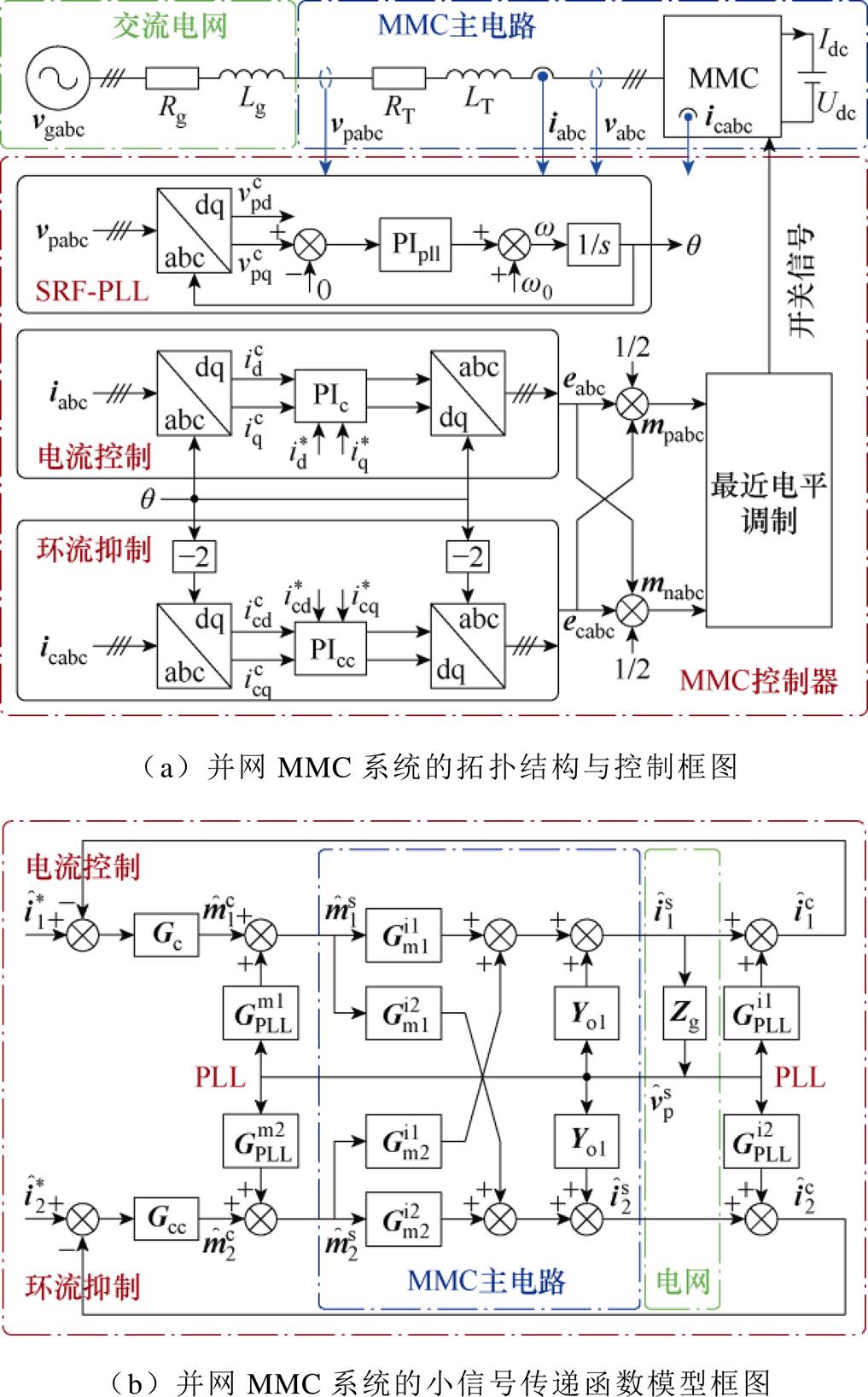
图1 并网MMC系统的拓扑结构和小信号模型框图
Fig.1 Block diagram of the topology and small-signal model of a grid-connected MMC system
表1 并网MMC系统的主要电路参数
Tab.1 Major circuit parameters of the grid-connected MMC system

参 数数 值 交流电压Vg/kV10 电网频率f1/Hz50 网侧电阻Rg/W0.6 网侧电感Lg/mH18.1 变压器电阻RT/W0.5 变压器电感LT/mH10 直流电压Udc/kV20 桥臂电感Larm/mH20 等效桥臂电阻Rarm/W0.2 子模块电容Csm/mF2 200 子模块数N20 MMC额定容量S/(MV·A)2
如图1a所示,MMC的控制系统通过PLL检测电网电压的频率与相位实现vpabc与电网同步,q 作为控制系统的同步信号实现dq坐标系与abc坐标系之间的信号变换。FFCC和CCSC均由dq坐标系中的比例积分(Proportional-Integral, PI)控制器实现。FFCC通过调节输出调制信号 将交流电流和调节在其参考值和上;CCSC通过调节输出调制信号
将交流电流和调节在其参考值和上;CCSC通过调节输出调制信号 以消除桥臂间的环流[22]。
以消除桥臂间的环流[22]。
在MMC稳态运行过程中,同一个桥臂中所有子模块电容电压动态变化范围都较接近。因此,可以将同一个桥臂中级联的子模块用电路平均模型等效以获得MMC的平均模型[14]。MMC平均模型的等效电路如图2所示,其中每一相都由上桥臂和下桥臂构成,每个桥臂的动态由一个等效电感Larm、一个等效电阻Rarm和一个受控电压源进行等效,Carm为平均子模块的等效电容。upj和unj(j=a, b, c)为上、下等效桥臂电压,ipj和inj为上、下桥臂电流,mpj和mnj为上、下桥臂中相应的调制信号。
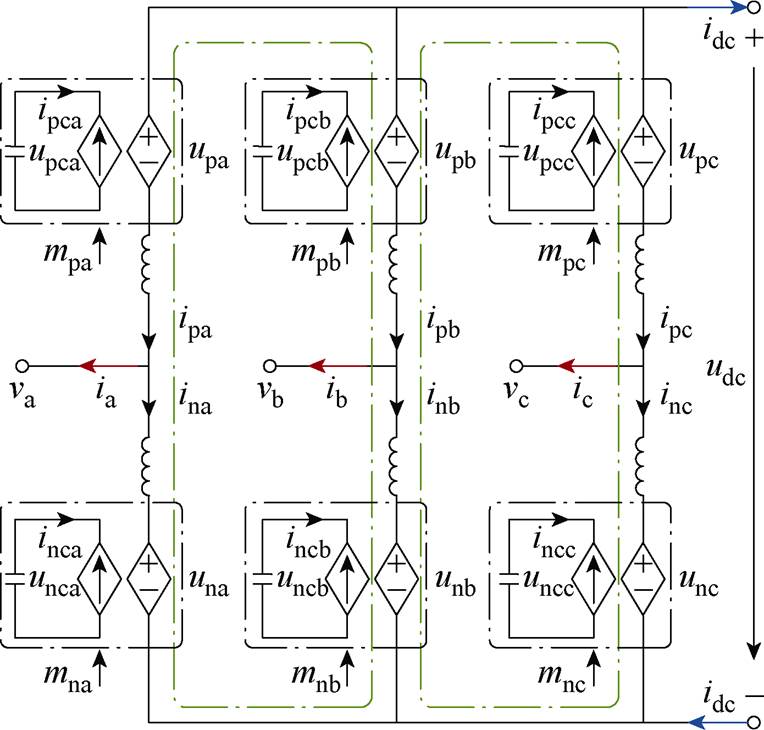
图2 MMC平均模型的等效电路
Fig.2 Equivalent circuit diagram of MMC average model
MMC平均模型中上、下桥臂等效电容电压upcj和uncj动态性能和桥臂电流ipj和inj动态性能是构建MMC小信号模型的基础。桥臂等效电容电压和桥臂电流动态与调制信号mpj和mnj之间相互耦合,它们的耦合关系可以描述为
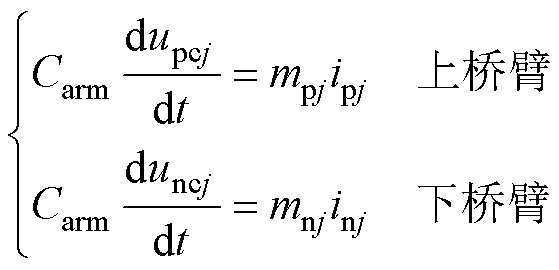 (1)
(1)
式中,Carm=Csm/N为桥臂等效电容。
根据基尔霍夫定律,ipj和inj的动态可以描述为
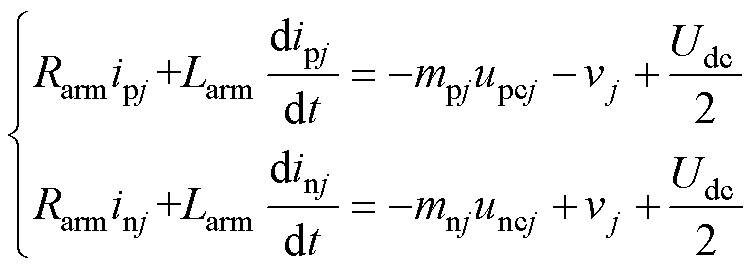 (2)
(2)
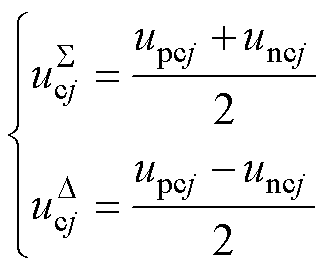
在MMC平均模型中,upcj和uncj动态和ipj和inj动态包括零序、基频、二倍频分量和可以忽略的更高频率分量[14],为了避免在建模过程中出现包含多个频率分量的变量,采用共模分量与差模分量表示法将MMC平均模型中固有的多频率分量进行分离。共模分量定义为上、下桥臂中方向相同的电压、电流分量,差模分量定义为上、下桥臂中方向相反的电压、电流分量。根据图2所示的MMC结构特征和MMC的工作原理,桥臂等效电容电压的共模和差模电压分量分别与直流母线电压和基频交流电压匹配。
桥臂等效电容电压的共模分量 和差模分量
和差模分量 分别定义为
分别定义为
 (3)
(3)
式中,包含直流和二倍频电压分量,分别驱动直流电流和三相桥臂间的二倍频环流; 为基频电压分量,提供MMC与交流电网之间的接口电压。
为基频电压分量,提供MMC与交流电网之间的接口电压。
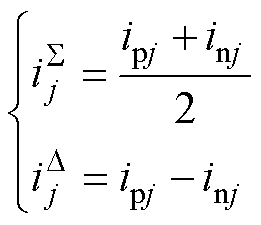
桥臂电流的共模分量 和差模分量
和差模分量 分别定义为
分别定义为
 (4)
(4)
式中,包含直流电流和二倍频环流分量,分别对应直流母线电流和三相桥臂间二倍频环流;为基频分量,对应交流电网电流。
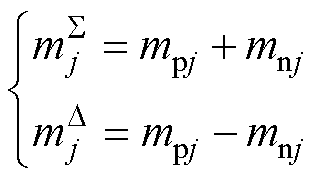
MMC控制器输出调制信号的共模分量 和差模分量
和差模分量 分别定义为
分别定义为
 (5)
(5)
式中,包含直流调制信号和二倍频调制信号分量,二倍频调制信号分量对应于CCSC输出调制信号;为基频分量,对应于FFCC输出调制信号。
在定义了MMC内部动态中桥臂等效电容电压、桥臂电流和调制信号的共模分量与差模分量之后,能够很方便地推导出MMC输出交流电流和二倍频环流的动态模型。首先,将式(3)~式(5)代入式(1)中可获得桥臂等效电容电压的共模分量和差模分量的动态方程分别为
 (6)
(6)
将式(3)~式(5)代入式(2)中可获得桥臂电流中共模分量 和差模分量
和差模分量 ,即MMC直流、交流输出电流以及相间环流的动态方程为
,即MMC直流、交流输出电流以及相间环流的动态方程为
 (7)
(7)
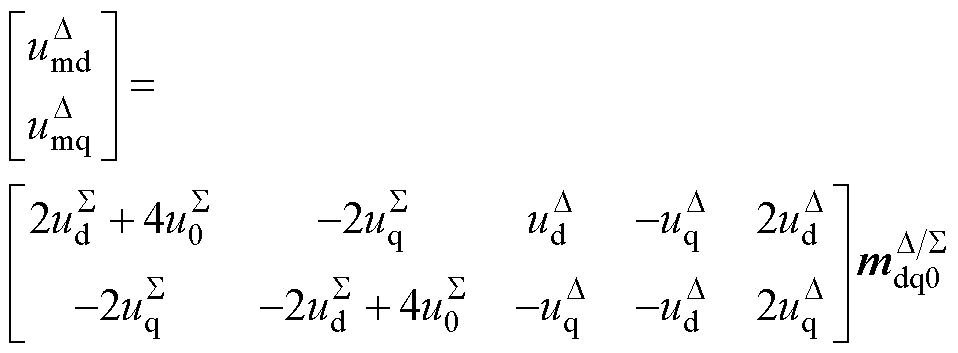
式中, 和
和 分别为驱动三相桥臂间环流和交流电流的调制电压信号。
分别为驱动三相桥臂间环流和交流电流的调制电压信号。
式(6)和式(7)构成了abc坐标系中采用共模分量与差模分量表示法描述MMC内部动态的平均模型。观察发现,MMC内部动态与其交流侧和直流侧输出变量之间存在明显的耦合效应[15]。这也是MMC外部动态与两电平VSC外部动态存在显著差异的根本原因。另外,MMC平均模型是线性时间周期信号,具有多频率之间相互耦合的分量[14]。
小信号稳定性分析的基础是系统线性时不变模型,为了获得可线性化的MMC时不变模型,需要将abc坐标系中MMC平均模型变换至同步旋转dq坐标系中,然后在系统稳态工作点处线性化获得小信号线性时不变模型。dq坐标系中MMC的小信号模型具体构建过程如下。
1.3.1 桥臂等效电容电压差模信号分量模型
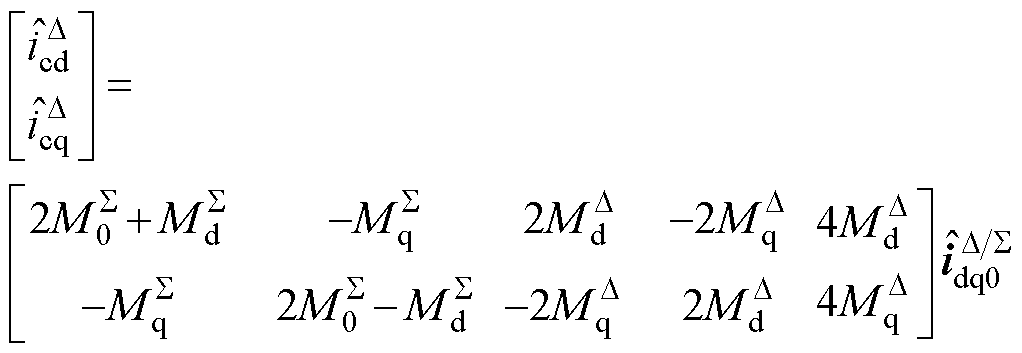
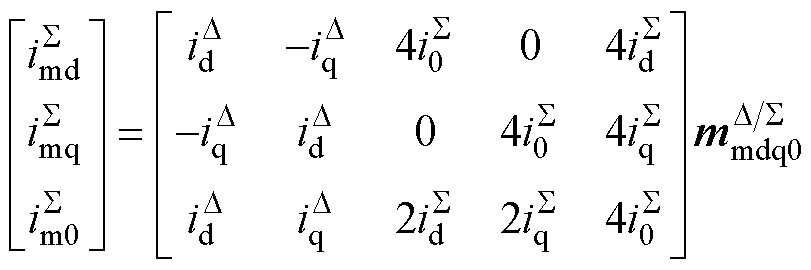
对式(6)中的应用基频角频率w1处的Park变换,dq坐标系中的基频分量表示为
 (8)
(8)
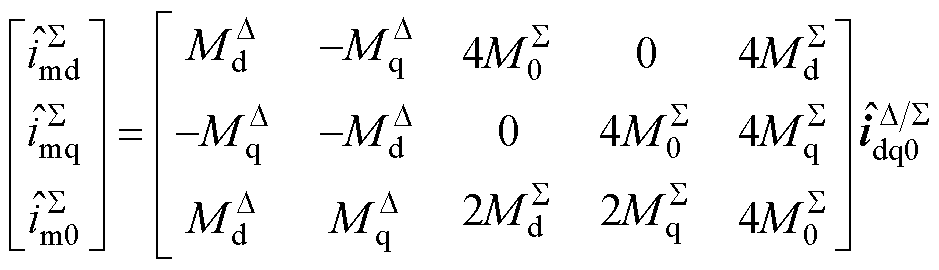
式中, 为与调制信号相关的调制电流,如式(9)所示;
为与调制信号相关的调制电流,如式(9)所示; 为由坐标变换引入的耦合分量。
为由坐标变换引入的耦合分量。
 (9)
(9)
其中
 (10)
(10)
在系统稳态值附近对式(8)中描述的桥臂等效电容电压动态采用线性化处理,并且应用Laplace变换后得出其小信号模型为
 (11)
(11)
式中, 为与FFCC有关的小信号扰动;
为与FFCC有关的小信号扰动; 为与MMC输出交流电流有关的小信号扰动。
为与MMC输出交流电流有关的小信号扰动。
 (12)
(12)
 (13)
(13)
其中
 (14)
(14)
 (15)
(15)
1.3.2 桥臂等效电容电压共模信号分量模型
对式(6)中的应用负序二倍角频率-2w1处的Park变换,dq坐标系中的电压分量表示为
 (16)
(16)
式中, 为与调制信号相关的调制电流。
为与调制信号相关的调制电流。
 (17)
(17)
对式(16)进行线性化处理后得出其小信号模型为
 (18)
(18)
其中, 和
和 分别表示为
分别表示为
 (19)
(19)
 (20)
(20)
1.3.3 桥臂电流差模信号分量模型
对式(7)中的电流基频分量应用基频角频率w1处的Park变换,dq坐标系中的电流基频分量可以表示为
 (21)
(21)
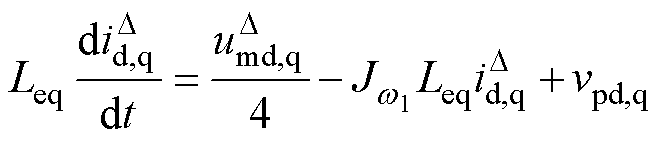
式中, 为与调制信号相关调制电压,即
为与调制信号相关调制电压,即
 (22)
(22)
对式(21)进行线性化处理后得出其小信号模型为
 (23)
(23)
式中,为与FFCC有关的小信号扰动; 为与系统电压有关的小信号扰动。
为与系统电压有关的小信号扰动。
 (24)
(24)
 (25)
(25)
1.3.4 桥臂电流共模信号分量模型
对式(7)中的应用负序二倍角频率-2w1处Park变换,dq坐标系下的电流共模分量表示为
 (26)
(26)
式中, 是与调制信号相关的调制电压,即
是与调制信号相关的调制电压,即
 (27)
(27)
对式(26)线性化处理后得出其小信号模型为
 (28)
(28)
式中,和 分别为
分别为
 (29)
(29)
 (30)
(30)
因此,式(11)、式(18)、式(23)和式(28)构成了dq坐标系中MMC功率级电路的小信号模型,这是分析并网MMC系统交互作用和小信号稳定性的基础。结合式(11)、式(18)、式(23)和式(28),消除中间变量等效桥臂电压差模信号和共模信号,可以推导出系统dq坐标系中基频电流 和环流
和环流 的频域小信号传递函数模型分别为
的频域小信号传递函数模型分别为
 (31)
(31)
式中, 和
和 分别为FFCC输出调制信号向量
分别为FFCC输出调制信号向量 到交流电流向量和环流向量的传递函数矩阵;
到交流电流向量和环流向量的传递函数矩阵; 和
和 分别为CCSC输出调制信号向量
分别为CCSC输出调制信号向量 到和的传递函数矩阵;
到和的传递函数矩阵; 和
和 分别为PCC电压向量
分别为PCC电压向量 到和
到和 的传递函数矩阵;为MMC交流侧开环导纳传递函数矩阵。本文后续的模型均在s域中建立,为简洁起见将省略频域符号(s)。
的传递函数矩阵;为MMC交流侧开环导纳传递函数矩阵。本文后续的模型均在s域中建立,为简洁起见将省略频域符号(s)。
本节基于并网MMC系统的等效环路增益模型分析了电网阻抗与PLL耦合效应对稳定性的影响机制。首先,在MMC功率级电路小信号模型的基础上,结合交流电网动态以及FFCC和CCSC等控制动态,构建了并网MMC系统的等效环路增益模型,并分析了并网MMC系统中的交互作用机理。其次,提出了结合系统等效环路增益RHP极点与频域特性的稳定性分析方法。再次,分析了弱电网下电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制。最后,提出了一种环路补偿方案,通过消除电网阻抗与PLL耦合效应提高并网MMC系统的稳定性。
如图1a所示,CCSC通常用于消除二倍频环流以提高MMC运行性能[22]。CCSC采用PI控制器的传递函数矩阵可表示为
 (32)
(32)
式中,Kpcc和Kicc分别为CCSC的比例和积分系数。
如图1b所示,PLL通过两个非对称的传递函数矩阵 和
和 对二倍频环流和CCSC输出调制信号产生影响,信号的变换关系为
对二倍频环流和CCSC输出调制信号产生影响,信号的变换关系为
 (33)
(33)
 (34)
(34)
其中
式中, 和
和 分别为dq坐标系中CCSC输出调制信号和环流的稳态值。
分别为dq坐标系中CCSC输出调制信号和环流的稳态值。
为了建立并网MMC系统的等效环路增益模型,需要将CCSC的动态参数等效地嵌入MMC功率级电路的小信号模型中。根据图1b所示的并网MMC系统的小信号模型,可以得到表示基频电流与CCSC输出调制信号的小信号模型之间的关系为
 (35)
(35)
 (36)
(36)
式中,I为单位矩阵; 为FFCC采用PI控制器的传递函数矩阵。
为FFCC采用PI控制器的传递函数矩阵。
结合式(32)、式(35)和式(36)即可获得CCSC等效嵌入MMC功率级电路的小信号传递函数模型框图,如图3所示。图3中,电网阻抗与PLL耦合效应在并网MMC系统交互作用小信号模型中引入一个额外的耦合环路 ,用带箭头的闭合环路表示,以突出其对系统动态特性的重要影响。
,用带箭头的闭合环路表示,以突出其对系统动态特性的重要影响。
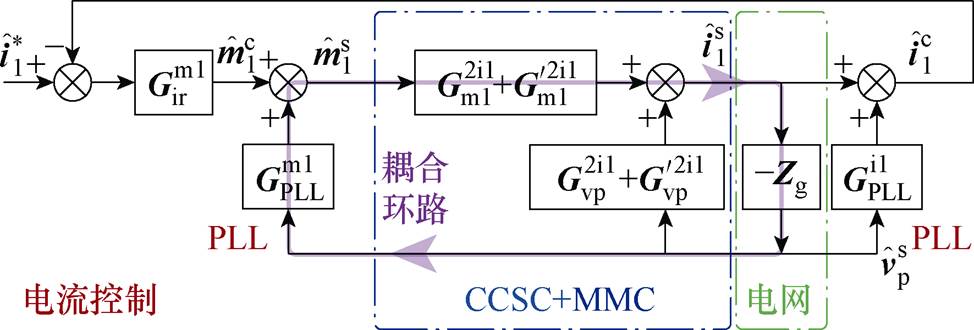
图3 CCSC等效嵌入MMC功率级电路的小信号传递函数模型
Fig.3 Small-signal transfer function model for CCSC equivalent embedded MMC power stage circuit
图3中, 和
和 分别代表嵌入在MMC功率级电路中描述CCSC动态的传递函数矩阵,具体表达式为
分别代表嵌入在MMC功率级电路中描述CCSC动态的传递函数矩阵,具体表达式为
 (37)
(37)
 (38)
(38)
从图3中可以发现,电网阻抗与PLL之间的耦合效应是通过与PLL动态相关的两个非对称的传递函数矩阵对基频电流 和基频调制信号
和基频调制信号 产生影响。电网阻抗与PLL耦合效应对和的影响[25]可描述为
产生影响。电网阻抗与PLL耦合效应对和的影响[25]可描述为
 (39)
(39)
 (40)
(40)
其中
式中, 和
和 分别为dq坐标系中FFCC输出调制信号和基频电流的稳态值。
分别为dq坐标系中FFCC输出调制信号和基频电流的稳态值。
为了进一步分析并网MMC系统等效环路增益中的交互作用,可以将图3等效变换为由交互作用传递函数描述的并网MMC系统小信号模型框图,如图4所示。并网MMC系统交互作用的小信号模型由三个传递函数块级联构成,分别为代表FFCC动态的传递函数块L1、电网阻抗和PLL之间耦合效应与嵌入CCSC动态的MMC功率级电路交互的传递函数块L2、PLL与交流电网交互作用的传递函数块L3。因此,该模型不仅能够揭示MMC内部的动态耦合特性,还能够直接捕捉到MMC与交流电网之间的交互作用。图4中,传递函数矩阵的逆运算采用了分数形式中分母的表示方法以方便描述。
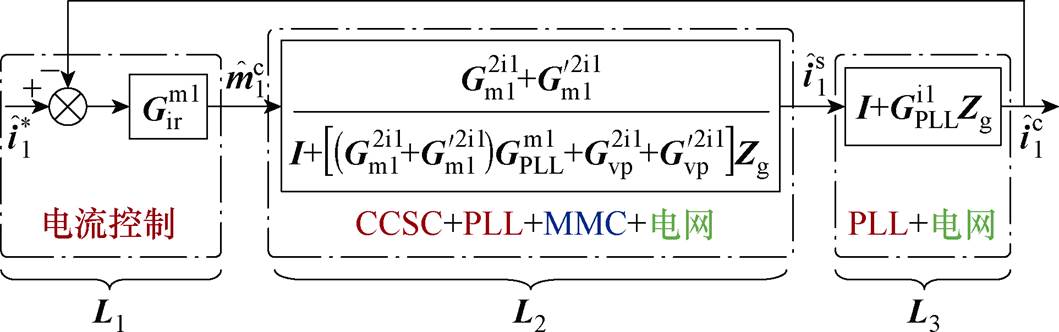
图4 并网MMC系统交互作用小信号模型框图
Fig.4 Block diagram of small signal model for interaction of grid-connected MMC systems
因此,并网MMC系统的闭环传递函数模型可表述为
 (41)
(41)
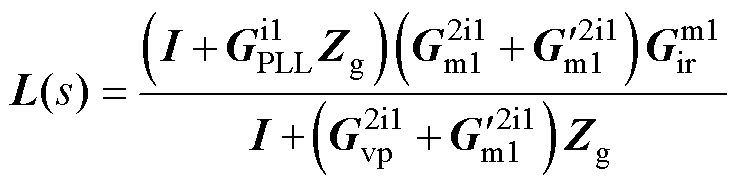
并网MMC系统的等效环路增益用L(s)表示为
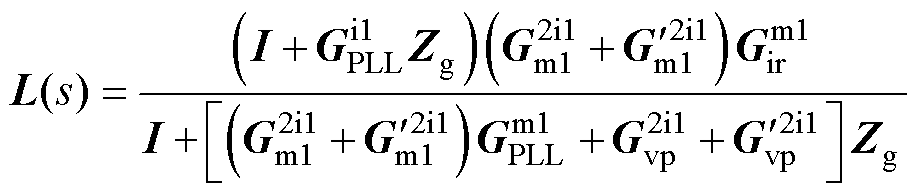 (42)
(42)
结合图4和式(42)可以发现,电网阻抗、MMC功率级电路以及控制系统之间的交互作用共同决定了并网MMC系统的运行特性。
式(42)中,电网阻抗与PLL耦合效应引入的耦合环路 位于分母中。从经典控制理论的角度分析,电网阻抗与PLL耦合效应会直接影响并网MMC系统等效环路增益的开环极点在复平面中的分布位置,从而间接影响系统闭环极点在复平面中的分布位置,最终影响系统稳定性。所以,电网阻抗与PLL耦合效应对并网MMC系统稳定性具有显著影响。因此,利用系统开环传递函数模型可以深入分析电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制。
位于分母中。从经典控制理论的角度分析,电网阻抗与PLL耦合效应会直接影响并网MMC系统等效环路增益的开环极点在复平面中的分布位置,从而间接影响系统闭环极点在复平面中的分布位置,最终影响系统稳定性。所以,电网阻抗与PLL耦合效应对并网MMC系统稳定性具有显著影响。因此,利用系统开环传递函数模型可以深入分析电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制。
根据表1提供的并网MMC系统的结构和控制参数,绘制出了在不同PLL带宽和电网阻抗条件下耦合环路 的频率响应曲线,如图5所示。在1~10 rad/s频率范围内,的幅值基本保持恒定且远大于0 dB,相位为180°。这表明,在该频率范围内具有较 强的负阻尼效应;在10~100 rad/s频率范围内,中表现出明显的谐振峰,这意味着耦合环路会放大该频率范围内的扰动信号,从而对并网MMC系统的稳定性产生影响。
的频率响应曲线,如图5所示。在1~10 rad/s频率范围内,的幅值基本保持恒定且远大于0 dB,相位为180°。这表明,在该频率范围内具有较 强的负阻尼效应;在10~100 rad/s频率范围内,中表现出明显的谐振峰,这意味着耦合环路会放大该频率范围内的扰动信号,从而对并网MMC系统的稳定性产生影响。
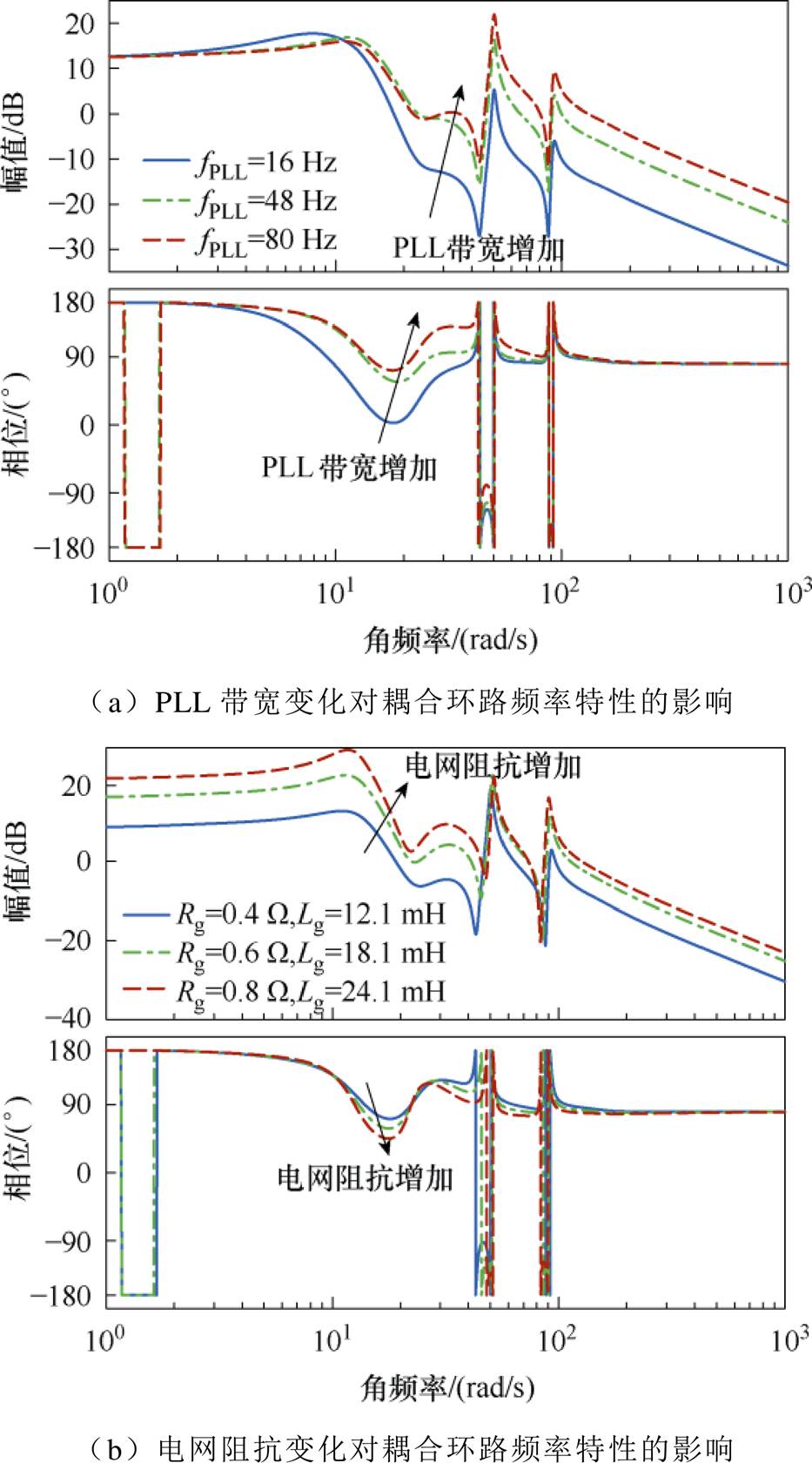
图5 电网阻抗与PLL耦合效应的频域特性曲线
Fig.5 Frequency domain characteristic curves of grid impedance and PLL coupling effect
的频率特性表明,增大PLL带宽和电网阻抗都会增强电网阻抗与锁相环耦合效应(即幅值增大),对系统稳定性的影响也会更加显著。进一步对比图5a和图5b可以发现,PLL带宽的变化主要影响10~100 rad/s频率范围内的谐振幅值,而电网阻抗变化主要影响1~10 rad/s频率范围内的环路增益,因此,PLL和电网阻抗变化可能会引起并网MMC系统在不同频率范围的失稳问题。
由于本文的研究重点在于揭示并网MMC系统中电网阻抗与PLL耦合效应造系统失稳的机制,因此,本文并未对MMC内部动态、环流控制等对耦合效应的影响展开详细分析。
值得注意的是,图4和式(42)表明,并网MMC系统是多输入多输出系统。为了分析电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制,在图4的基础上,建立了并网MMC系统的等效多输入多输出传递函数模型框图,如图6所示。
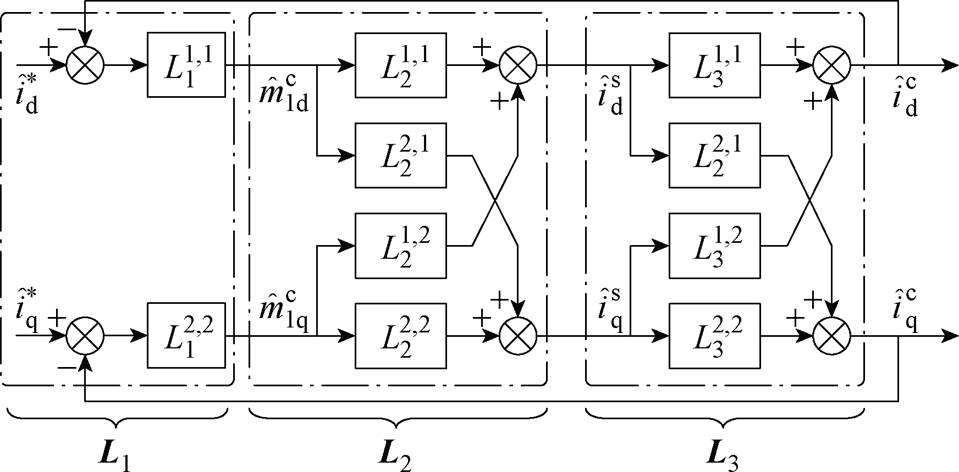
图6 等效多输入多输出传递函数模型框图
Fig.6 Block diagram of the equivalent multiple-input multiple-output transfer function model
利用传递函数矩阵变换为单输入单输出闭环传递模型的方法[26],可以进一步推导出并网MMC系统的两个单输入单输出的闭环传递函数模型Gcd(s)和Gcq(s),如式(43)和式(44)所示。在图6与式(43)、式(44)中, (m, n=1, 2)中的上标代表L(s)中对应位置的矩阵元素。在式(43)和式(44)中,闭环传递函数Gcd(s)和Gcq(s)的分母是相同的,表明系统的特征方程是唯一的,这意味着两个单输入单输出的闭环传递函数模型所描述的并网MMC系统稳定性是一致的。因此,可以利用Gcd(s)和Gcq(s)共有的等效环路增益分析并网MMC系统的稳定性。
(m, n=1, 2)中的上标代表L(s)中对应位置的矩阵元素。在式(43)和式(44)中,闭环传递函数Gcd(s)和Gcq(s)的分母是相同的,表明系统的特征方程是唯一的,这意味着两个单输入单输出的闭环传递函数模型所描述的并网MMC系统稳定性是一致的。因此,可以利用Gcd(s)和Gcq(s)共有的等效环路增益分析并网MMC系统的稳定性。
 (43)
(43)
 (44)
(44)
根据Nyquist稳定性判据[27],当系统闭环传递函数的RHP极点数量Z=0时,系统是稳定的。
 (45)
(45)
式中,P和N分别为系统等效环路增益的RHP极点的数量和系统等效环路增益的Nyquist曲线沿逆时针方向包围(-1, j0)的次数。
Nyquist稳定性判据适用于任何系统的稳定性分析,但在复杂系统的稳定性分析中计算N的过程十分复杂,而且Nyquist稳定性分析结果对指导系统控制器设计的作用有限[28]。为了更加方便地计算N以及提供控制器设计的指导,文献[28-29]提出了利用等效环路增益的对数频域特性计算N的方法。因此,Nyquist稳定性判据重新表述为
 (46)
(46)
式中, 为在等效环路增益的幅值大于0 dB的频率范围内,相位增加时与相位±180°之间的交点个数;
为在等效环路增益的幅值大于0 dB的频率范围内,相位增加时与相位±180°之间的交点个数; 为在等效环路增益的幅值大于0 dB的频率范围内,相位减小时与相位±180°之间的交点个数,如在图7c中频率fc1处的交点记为。如果在等效环路增益的幅值大于0 dB的频率范围内,相频特性曲线与相位±180°之间没有交点,则意味着系统等效环路增益的Nyquist曲线沿逆时针方向包围(-1, j0)的次数是0。
为在等效环路增益的幅值大于0 dB的频率范围内,相位减小时与相位±180°之间的交点个数,如在图7c中频率fc1处的交点记为。如果在等效环路增益的幅值大于0 dB的频率范围内,相频特性曲线与相位±180°之间没有交点,则意味着系统等效环路增益的Nyquist曲线沿逆时针方向包围(-1, j0)的次数是0。
根据式(46)描述的Nyquist稳定性判据,结合系统等效环路增益零极点和频域特性的稳定性分析方法可以很方便地解释复杂系统的失稳机制。值得注意的是,现有的稳定性分析中往往会假设系统中不存在RHP极点[28],只根据式(45)并利用Nyquist曲线包围(-1, j0)的次数来评估系统稳定性。然而,复杂的控制环与变换器之间交互作用可能会在子系统中引入右半平面极点。而且,在系统中存在和不存在RHP极点时,系统的失稳机制是不同的。
为此,首先利用式(46)描述的Nyquist稳定性判据分析了一个五阶系统在无/有RHP极点情况下的失稳机制,图7和图8分别对应无/有RHP极点(p1和p2)时系统失稳机制的分析方法。图7a中所有的极点位于左半平面,而图8a中极点p1和p2位于右半平面。系统等效环路增益的极点和零点位置能够提供系统响应特性的定性洞察,当极点位于左半平面时,在相频特性中会引起90°的相位滞后征;而每一个RHP极点在相频特性中会引起90°相位超前,即RHP极点会在频域特性中体现出幅值减小而相位增加的特征,如图8c所示。左半平面极点与RHP极点引起的相位滞后与相位超前特征同样会反映到系统的Nyquist曲线中,如图7b和8b绿色箭头所示。
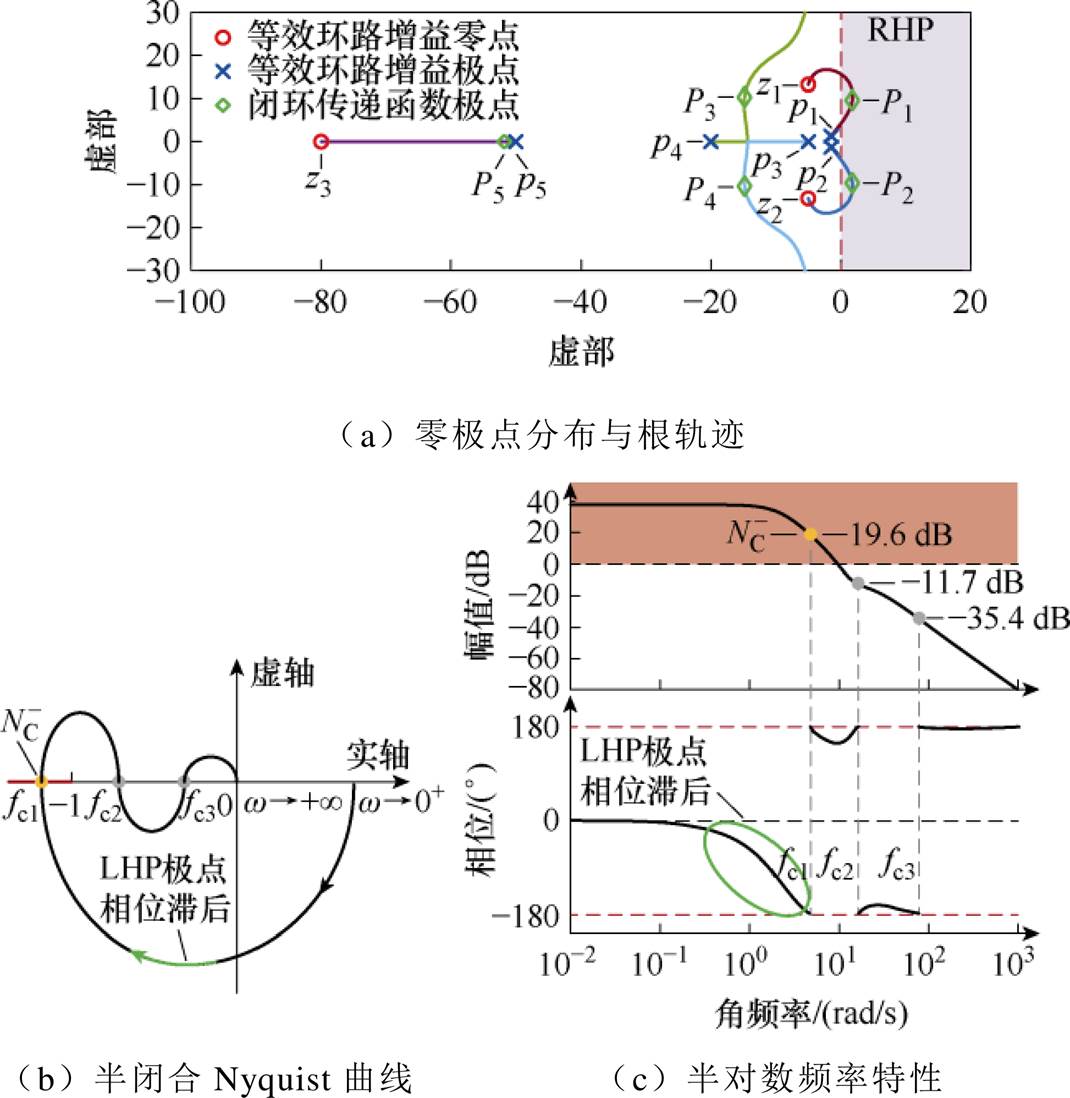
图7 无RHP极点时系统失稳机制
Fig.7 System destabilization mechanism in the absence of RHP poles
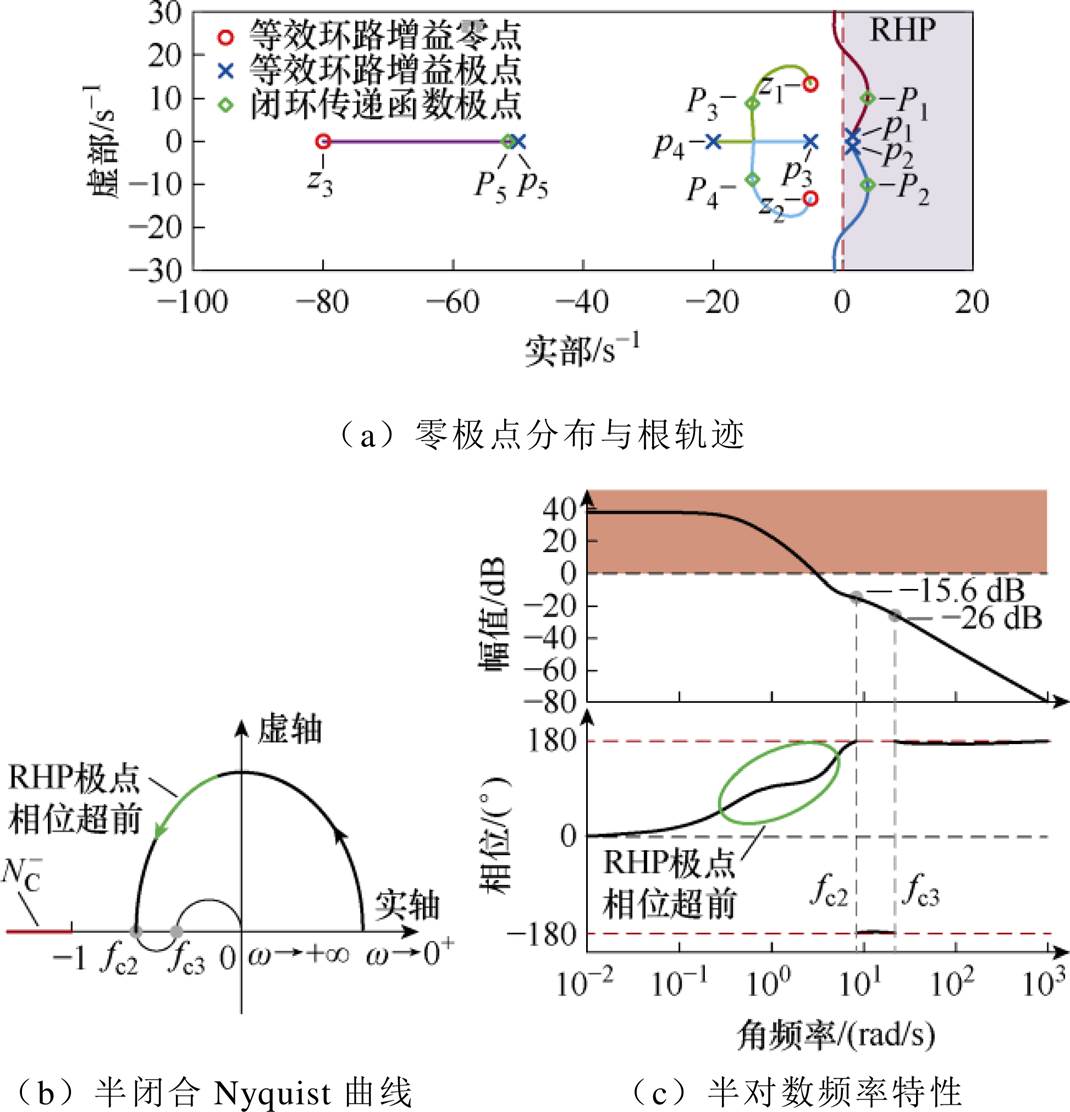
图8 存在RHP极点时系统失稳机制
Fig.8 System destabilization mechanisms in the presence of RHP poles
观察图7b可以发现,由于零极点的相位叠加效应存在,随着频率增加,系统的Nyquist曲线与负实轴之间存在三个交点,且第一个交点位于(-1, j0)点左侧,意味着系统的Nyquist曲线沿顺时针方向包围了(-1, j0)点一次,即=1;对应于图7c中,在频率fc1处,相频特性曲线与相位±180°相交,且系统的幅值大于0 dB,图中用黄色圆点标记。根 据式(46)表述的Nyquist稳定性判据,
 ,这意味着系统存在右半平面闭环极点。因此,系统是不稳定的。
,这意味着系统存在右半平面闭环极点。因此,系统是不稳定的。
当存在两个RHP极点时,图8c所示的系统相频特性表现出了相位超前特征,与图7c中的相频特性显著不同,这种变化导致了系统的Nyquist曲线与负实轴之间只存在两个交点,且不再存在位于(-1, j0)点左侧的交点,这意味着Nyquist曲线不包围(-1, j0),即N=0;图8c中,相频特性曲线与相位±180°相交的频率处,幅值均小于0 dB。根据式(46), ,同样意味着系统存在右半平面极点。因此,系统也是不稳定的。
,同样意味着系统存在右半平面极点。因此,系统也是不稳定的。
根据上述分析,可以总结出在无/有RHP极点情况下的失稳机制:
(1)当系统等效环路增益极点都位于左半平面时,系统的Nyquist曲线与负实轴的交点会因为增益的增大而包围(-1, 0)点,对应到频域特性中,即在相频特性与相位±180°相交频率处对应的幅值大于0 dB,最终系统存在RHP的闭环极点,使得系统不稳定。
(2)当极点位于右半平面时,系统的相频特性发现显著变化,系统的Nyquist曲线与负实轴的交点会因为增益不足而无法包围(-1, 0)点,对应到频域特性中,即在相频特性与相位±180°相交频率处对应的幅值小于0 dB,最终系统存在RHP的闭环极点,同样会使系统不稳定。
为了深入揭示电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制,本节结合等效环路增益的零极点与频域特性分析了并网MMC系统中的交互作用和稳定性,并根据式(46)表述的Nyquist稳定性判据评估了系统稳定性。图9~图12分别分析了低、高带宽PLL控制下电网阻抗与PLL耦合对系统稳定性影响,以及电网阻抗变化对系统稳定性的影响和增加FFCC增益来缓解电网阻抗与PLL耦合效应对系统稳定性影响的分析结果。
在低PLL带宽控制条件下,fPLL=16 Hz,并网MMC系统等效环路增益的零极点图与对数频域特性如图9所示。图9a中,在零极点平面,系统等效环路增益的所有极点都位于左半平面,即P=0。图9c中,主导极点对p1,2和p3,4在相频特性中都引入了180°的相位滞后特征,最终,系统的相频特性曲线与相位±180°不存在交点,即
 ,在图9b中则表现为系统的Nyquist曲线与(-1, j0)点左侧不存在交点。因此,系统的闭环传递函数的RHP极点个数Z=P-N=0,与图9a中菱形“
,在图9b中则表现为系统的Nyquist曲线与(-1, j0)点左侧不存在交点。因此,系统的闭环传递函数的RHP极点个数Z=P-N=0,与图9a中菱形“ ”相对应。
”相对应。
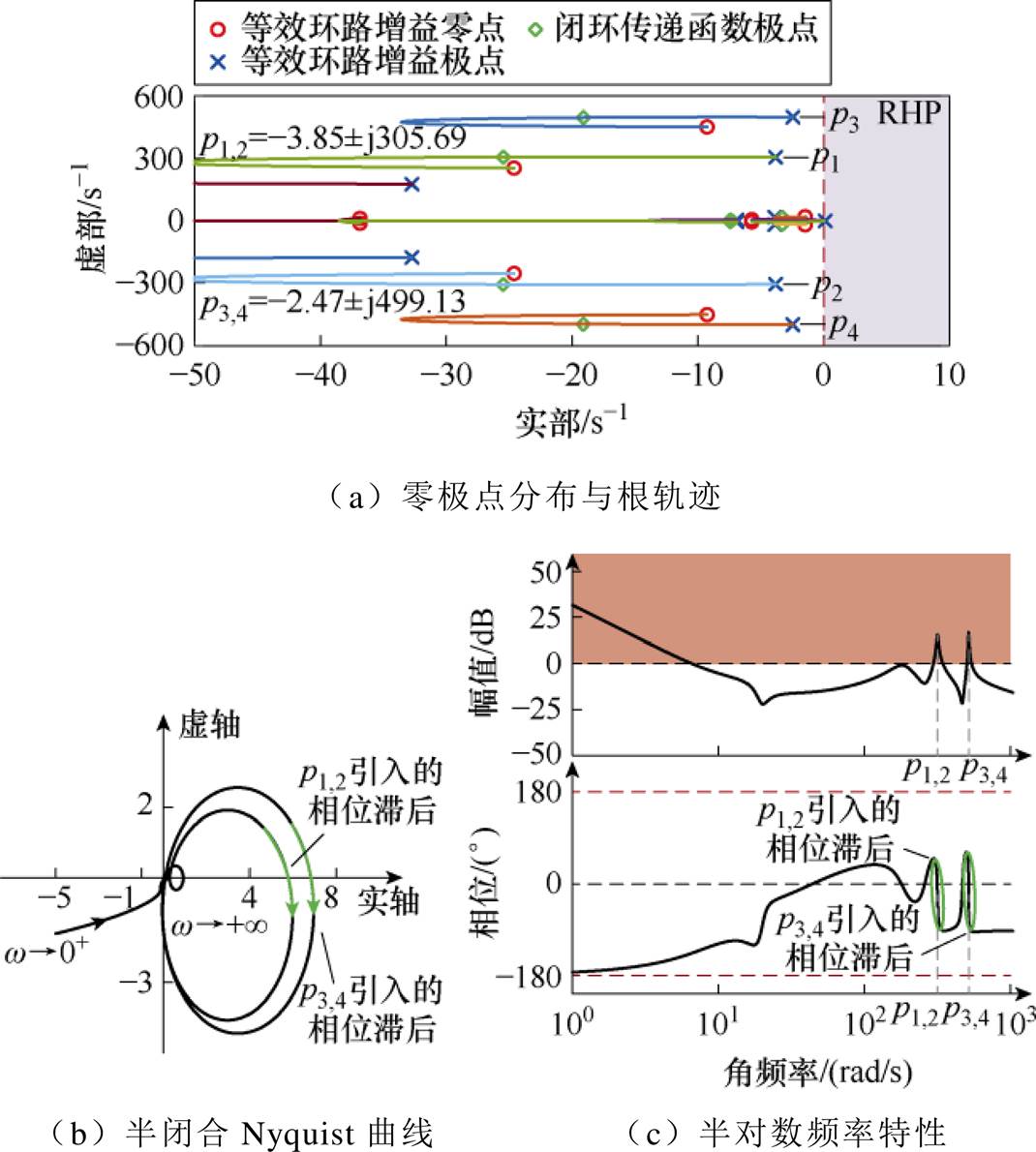
图9 低PLL带宽条件下系统的根轨迹与频率特性
Fig.9 Root locus and frequency characteristics of the system under low PLL bandwidth condition
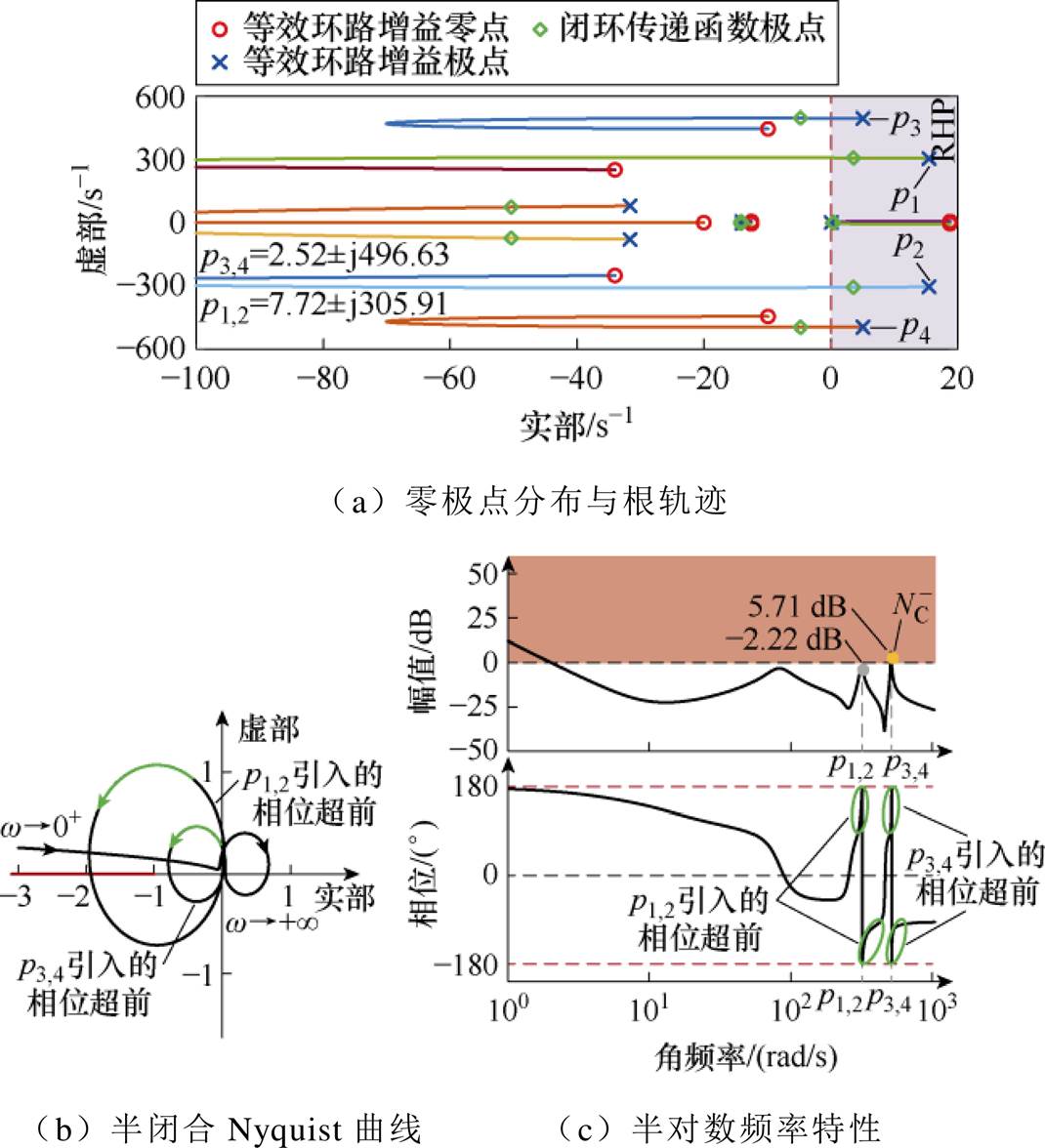
图10 高PLL带宽条件下系统的根轨迹与频率特性
Fig.10 Root locus and frequency characteristics of the system under high PLL bandwidth condition
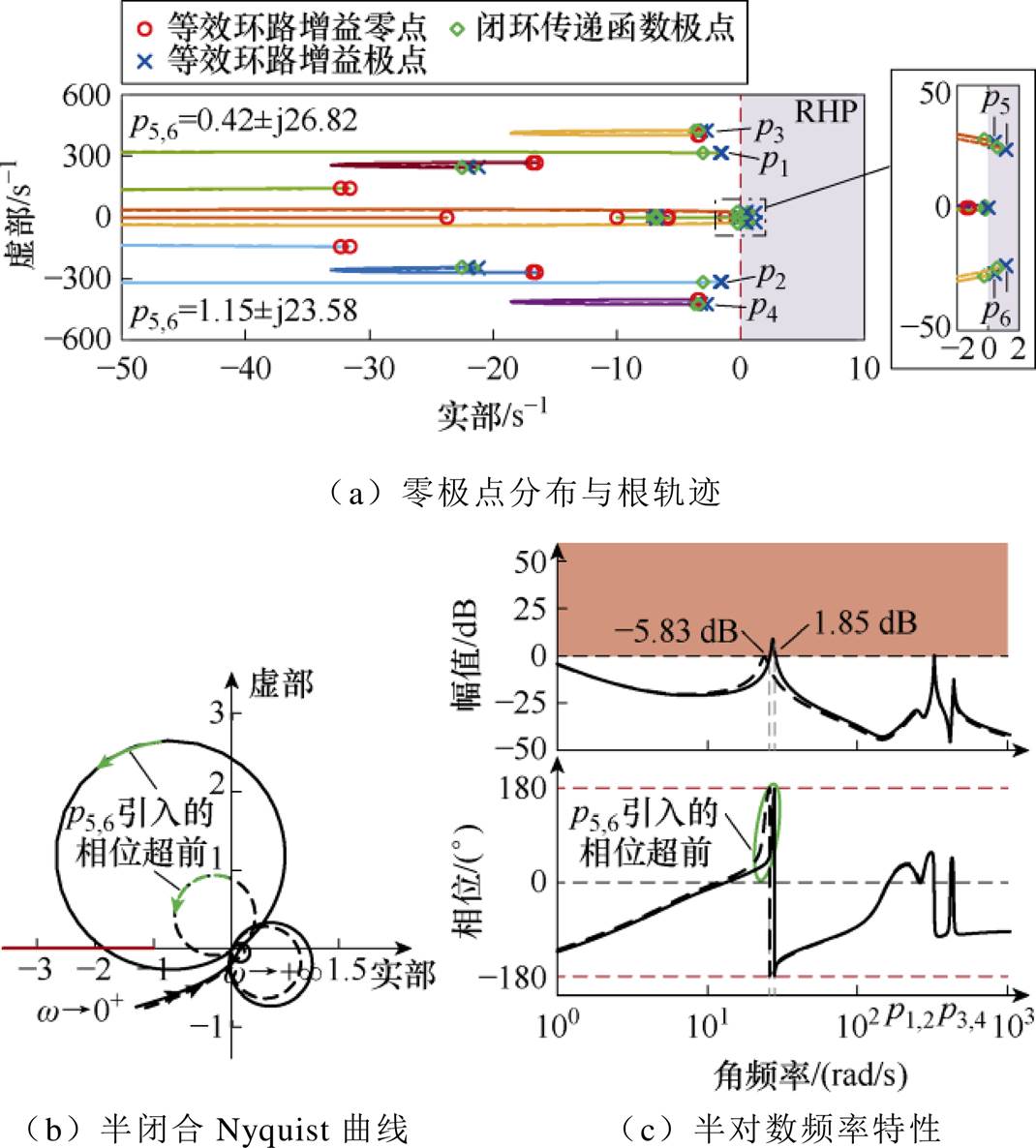
图11 增大电网阻抗时系统的根轨迹与频率特性
Fig.11 Root locus and frequency characteristics of the system when increasing the grid impedance
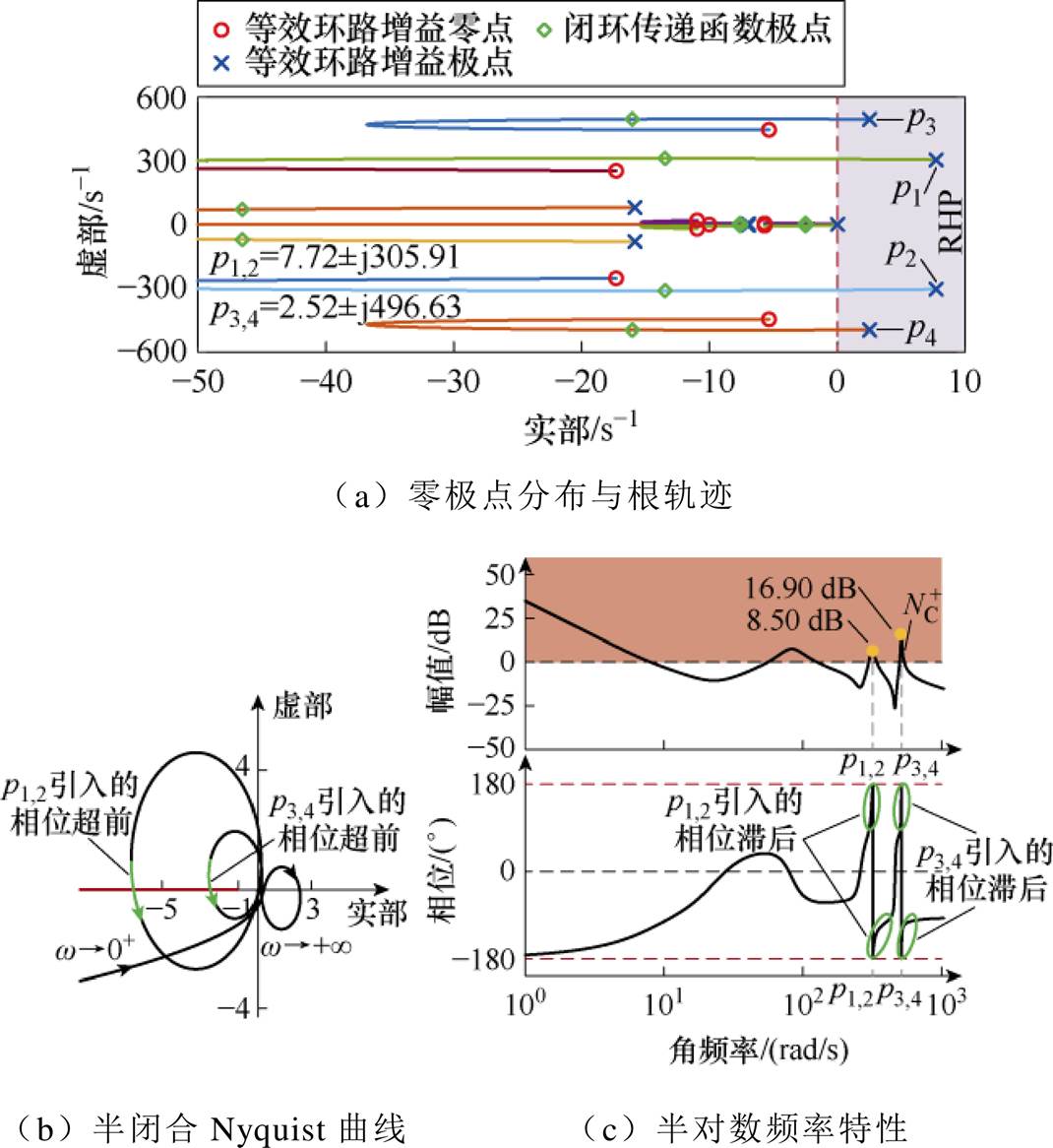
图12 高PLL带宽条件下增加FFCC增益时系统的根轨迹与频率特性
Fig.12 Root locus and frequency characteristics with increased FFCC gain at high PLL bandwidth condition
在高PLL带宽控制条件下,fPLL=64 Hz,不稳定系统案例的零极点与对数频域特性如图10所示。图10a中,等效环路增益的零极点中存在4个RHP极点,即P=4。图10c中,RHP主导极点对p1,2和p3,4在相频特性中都引入了180°的相位超前特征,由于零极点的相位叠加效应存在,随着频率增加,系统的相频特性曲线与±180°之间存在两个交点,对应的幅值分别为-2.22 dB和5.71 dB,即 ,
, 。因此,
。因此, 。图10b中则表现为系统的Nyquist曲线随着频率的增加与(-1, j0)点存在1个交点。因此,系统的闭环传递函数的RHP极点个数Z=P-N=2≠0,与图10a中菱形“
。图10b中则表现为系统的Nyquist曲线随着频率的增加与(-1, j0)点存在1个交点。因此,系统的闭环传递函数的RHP极点个数Z=P-N=2≠0,与图10a中菱形“ ”相对应。
”相对应。
通过分析图4和式(42)发现,增加电网阻抗同样会加剧耦合效应对系统稳定性的不利影响。图11为电网阻抗变化对并网MMC系统稳定性影响的分析结果。虚线和实线分别代表在电网阻抗为Rg=0.8 W,Lg=24.1 mH和Rg=1.0 W,Lg=30.2 mH时的稳定性分析结果。在这两组电网阻抗条件下,系统等效环路增益的零极点图中都存在一对右半平面极点p5,6即P=2;而且,图11c中,等效环路增益的右半平面极点对p5,6在相频特性中都引入了180°的相位超前特征。由于零极点的相位叠加效应,随着频率增加,系统的相频特性曲线都与±180°之间存在1个交点,对应频率处的幅值分别为1.85 dB和-5.83 dB,即分别对应 ,和
,和 。因此,当电网阻抗为Rg=0.8 W,Lg=24.1 mH时,;当Rg=1.0 W,Lg=30.2 mH时,
。因此,当电网阻抗为Rg=0.8 W,Lg=24.1 mH时,;当Rg=1.0 W,Lg=30.2 mH时, 。
。
在这两组电网阻抗条件下,随着频率的增加,图11b中系统的半闭合Nyquist曲线与(-1, j0)点的交点数分别为1个和0个。这表明系统的闭环传递函数的右半平面极点个数分别为Z=P-N=0和Z=P-N=2≠0,这与图11a中菱形标记“”相对应。根据稳定性判据可以得出结论:当电网阻抗Rg= 0.8 W,Lg=24.1 mH时,系统是稳定的;而当电网阻抗Rg=1.0 W,Lg=30.2 mH时,系统将变得不稳定。
结合图4和式(42)可以发现,通过增大FFCC传递函数块L1的增益可以提高等效环路增益的幅值,也就是改变N,从而影响系统稳定性。因此,在高PLL带宽控制条件下,fPLL=64 Hz,通过增大FFCC增益使并网MMC系统稳定案例的零极点与对数频域特性如图12所示。与图11中不稳定案例零极点相同,这里仍满足P=4。在图12c中,系统的相频特性曲线与相位±180°之间仍存在两个交点,但对应的幅值分别为8.77 dB和17.2 dB,均大于0 dB。即 、。因此,
、。因此, 。对应的系统的Nyquist曲线随着频率的增加与(-1, j0)点存在2个交点,如图12b所示。因此,系统的闭环传递函数的RHP极点个数Z=P-N=0,与图12a中菱形“”相对应。
。对应的系统的Nyquist曲线随着频率的增加与(-1, j0)点存在2个交点,如图12b所示。因此,系统的闭环传递函数的RHP极点个数Z=P-N=0,与图12a中菱形“”相对应。
为了进一步分析在不同的电网阻抗与PLL耦合效应强度下,FFCC增益与并网MMC系统稳定性之间的联系,绘制如图13所示的不同PLL带宽与电网阻抗条件下稳定区域和边界。图13中,“ ”表示稳定的参数组合,“
”表示稳定的参数组合,“ ”表示不稳定的参数组合,实线则划定了系统的稳定性边界。图13b中,z0= 0.1 W +1.81 mH。
”表示不稳定的参数组合,实线则划定了系统的稳定性边界。图13b中,z0= 0.1 W +1.81 mH。
通过分析图13所展示的FFCC增益随着PLL带宽和电网阻抗变化的关系,可以发现,随着PLL带宽和电网阻抗的增加,即电网阻抗与PLL之间的耦合效应更强,需要增大基频电流控制增益以减缓并网MMC系统的不稳定问题。当电网阻抗足够大时,仅仅通过增大FFCC增益已无法保证并网MMC系统的稳定性。因此,为了提高并网MMC系统的稳定性,设计合适的补偿环路来消除电网阻抗与锁相环的耦合效应是十分必要的。
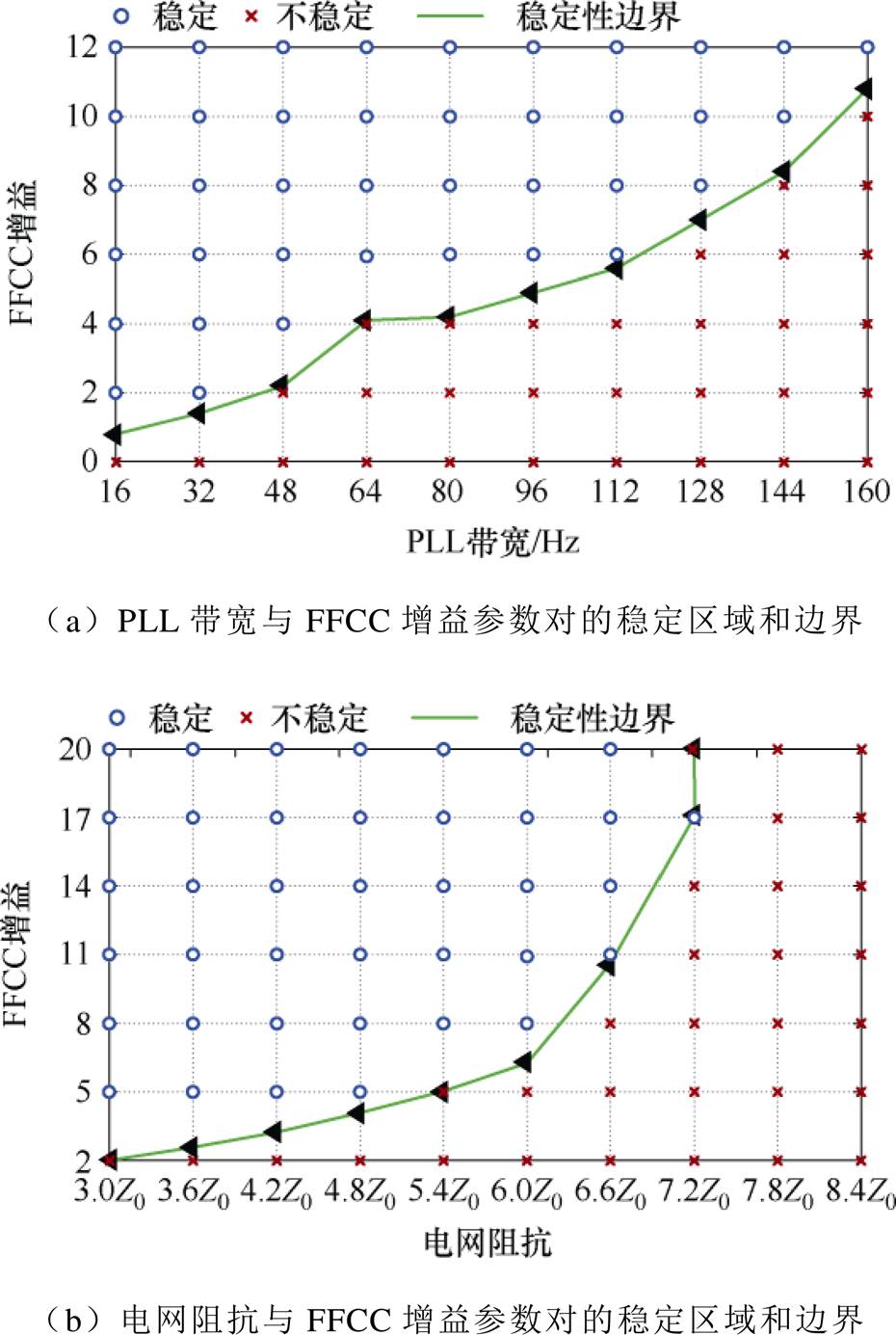
图13 不同PLL带宽与电网阻抗条件下稳定区域和边界
Fig.13 Stabilization regions and boundaries for different PLL bandwidths and grid impedance conditions
为了彻底消除弱电网下电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响,设计了一种环路补偿方案,如图14所示。环路补偿方案一共包括4个环节:①PCC电压采样与Park坐标变换环节;②坐标反变换环节;③低通滤波环节;④电网阻抗与PLL耦合效应补偿环节。
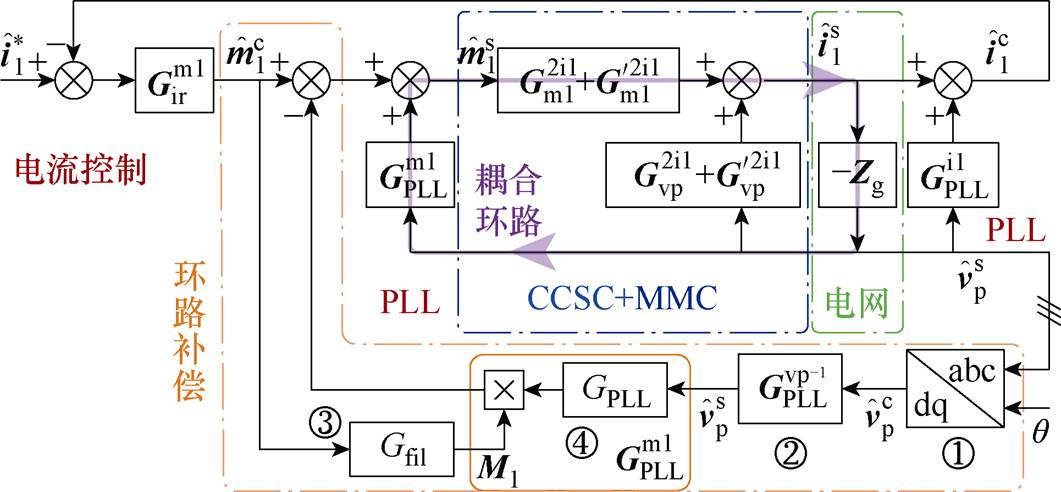
图14 带补偿环路的并网MMC系统小信号传递函数模型
Fig.14 Small-signal transfer function model for grid-connected MMC systems with compensation loop
环路补偿方案实现过程如下:首先,在系统dq坐标系中PCC电压信号 经过采样和Park坐标变换环节得到控制器dq坐标系信号
经过采样和Park坐标变换环节得到控制器dq坐标系信号 (①);然后,为了在控制器中获得,需要将进行坐标反变换环节(②)。同时,基频电流控制调制信号
(①);然后,为了在控制器中获得,需要将进行坐标反变换环节(②)。同时,基频电流控制调制信号 经过低通滤波环节Gfil得到其稳态值M1(③)。其次,在电网阻抗与PLL耦合效应补偿环节中(④),M1与PLL传递函数GPLL相乘得到传递函数矩阵
经过低通滤波环节Gfil得到其稳态值M1(③)。其次,在电网阻抗与PLL耦合效应补偿环节中(④),M1与PLL传递函数GPLL相乘得到传递函数矩阵 。最后,PCC电压信号与传递函数矩阵相乘之后嵌入基频电流控制环中,从而彻底消除电网阻抗与PLL耦合效应引入的耦合环路。
。最后,PCC电压信号与传递函数矩阵相乘之后嵌入基频电流控制环中,从而彻底消除电网阻抗与PLL耦合效应引入的耦合环路。
环路补偿方案中②~④环节的传递函数分别为
 (47)
(47)
 (48)
(48)
 (49)
(49)
式(47)和式(49)涉及PCC电压稳态值和PLL比例和积分增益,这些参数可以通过系统稳态运行点和控制器参数获取。式(48)为低通滤波器传递函数,由于其参数并非基于原有系统参数得来,需单独进行设计。因此,在补偿回路中只需要对低通滤波器环节③进行参数设计。在设计低通滤波器参数时,采用了文献[30-31]中的低通滤波器参数设计原则,低通滤波器的带宽与基频电流控制带宽保持一致,即wf=wc。
在环路补偿方案中,PCC电压信号和基频电流控制调制信号是并网MMC系统控制器中固有的信号,因此采用此补偿策略不需要增加额外的测量设备,不会增加系统的硬件建设成本。
在增加了环路补偿方案之后,并网MMC系统交互作用小信号模型框图可以修正为图15所示的消除耦合效应后并网MMC系统交互作用小信号模型框图。对比图3和图15可以发现一项重要变化:由电网阻抗与PLL引入的耦合环路被完全消除了。
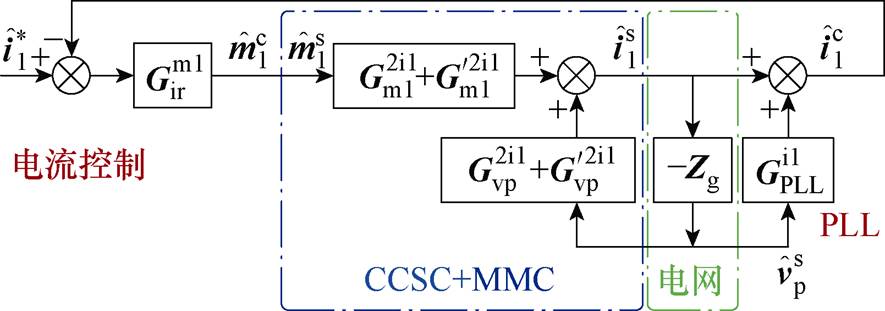
图15 消除耦合效应后并网MMC系统交互作用小信号模型框图
Fig.15 Small-signal model block diagram of interaction of grid-connected MMC system eliminating the coupling effect
消除电网阻抗与PLL耦合效应后,并网MMC系统的等效环路增益L(s)重新表示为
 (50)
(50)
观察图15和式(50),通过环路补偿方案可以彻底消除电网阻抗与PLL耦合效应,从而解决弱电网下电网阻抗与PLL耦合效应和控制系统之间交互作用引起并网MMC系统的失稳问题。这表明,通过环路补偿方案能够从根本上解决由电网阻抗与PLL耦合效应引起的并网MMC系统的稳定性问题。
图16为采用环路补偿方案后并网MMC系统的零极点图与对数频域特性。
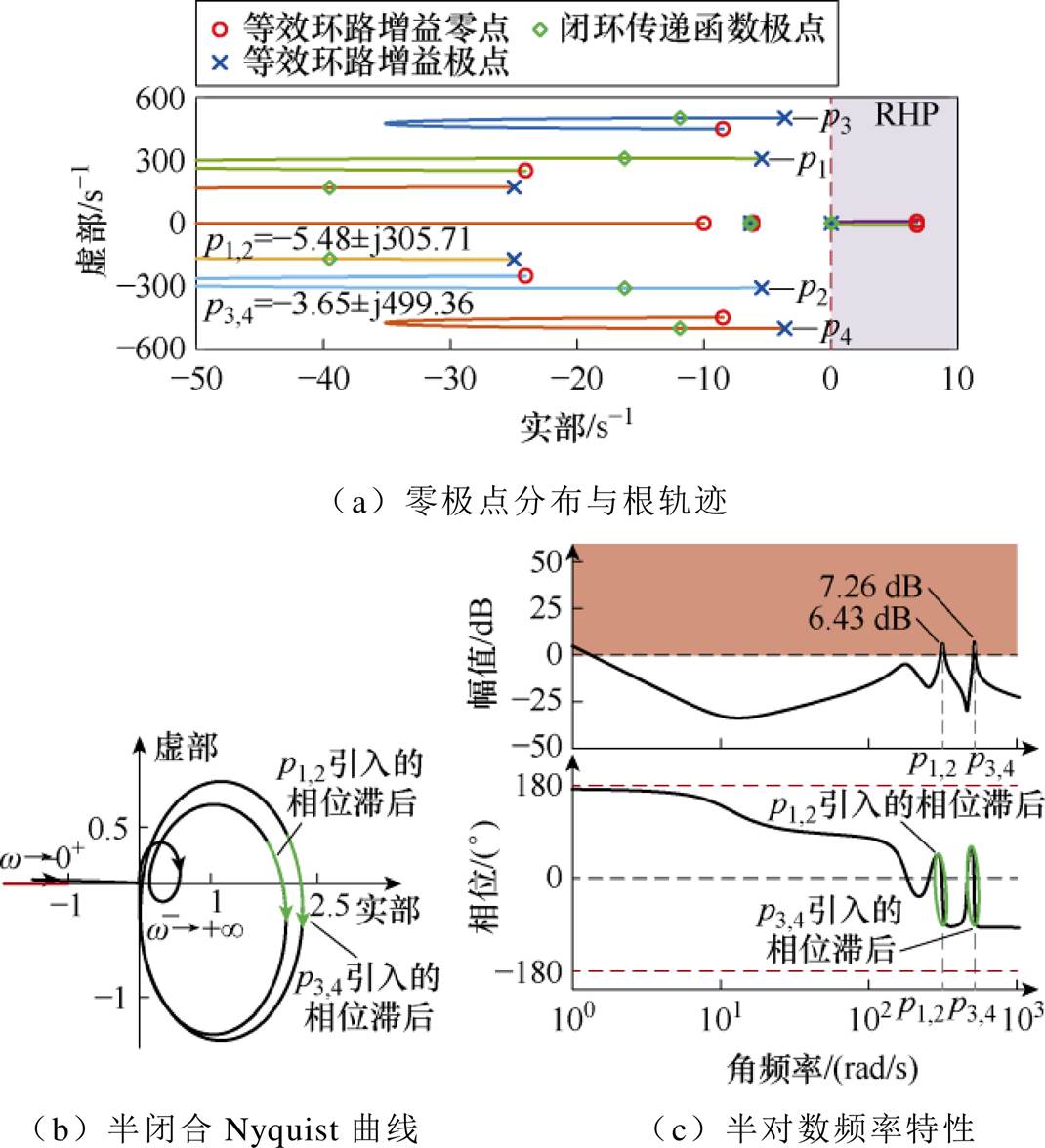
图16 消除电网阻抗与PLL耦合效应的根轨迹与频率特性
Fig.16 Root locus and frequency characteristics after eliminating the grid impedance and PLL coupling effect
在高PLL带宽条件下,fPLL=64 Hz,通过消除电网阻抗与PLL耦合效应使并网MMC系统稳定案例的根轨迹和频域特性如图16所示。如图16a所示,在零极点平面中,等效环路增益的零极点都位于左半平面中,即P=0;在图16b中相频特性曲线与相位±180°不存在交点,即 。因此,系统的闭环传递函数的RHP极点个数Z=P-N=0,与图16a零极点平面中菱形“”相对应。
。因此,系统的闭环传递函数的RHP极点个数Z=P-N=0,与图16a零极点平面中菱形“”相对应。
表2总结了上述分析中在不同参数配置下并网MMC系统的稳定性分析案例,案例1为低PLL带宽条件下的稳定案例,稳定性分析结果如图9所示;案例2为高PLL带宽条件下的失稳案例,稳定性分析结果如图10所示;案例3和4为低PLL带宽条件下,增大电网阻抗时的稳定与失稳案例,稳定性分析结果如图11所示。案例5为高PLL带宽条件下,增加FFCC增益使系统稳定的案例,稳定性分析结果如图12所示;案例6为高PLL带宽条件下,通过环路补偿消除了电网阻抗与PLL耦合效应的系统稳定案例,稳定性分析结果如图16所示。
表2 并网MMC系统稳定性分析案例
Tab.2 Cases' study of stability analysis of the grid-connected MMC system
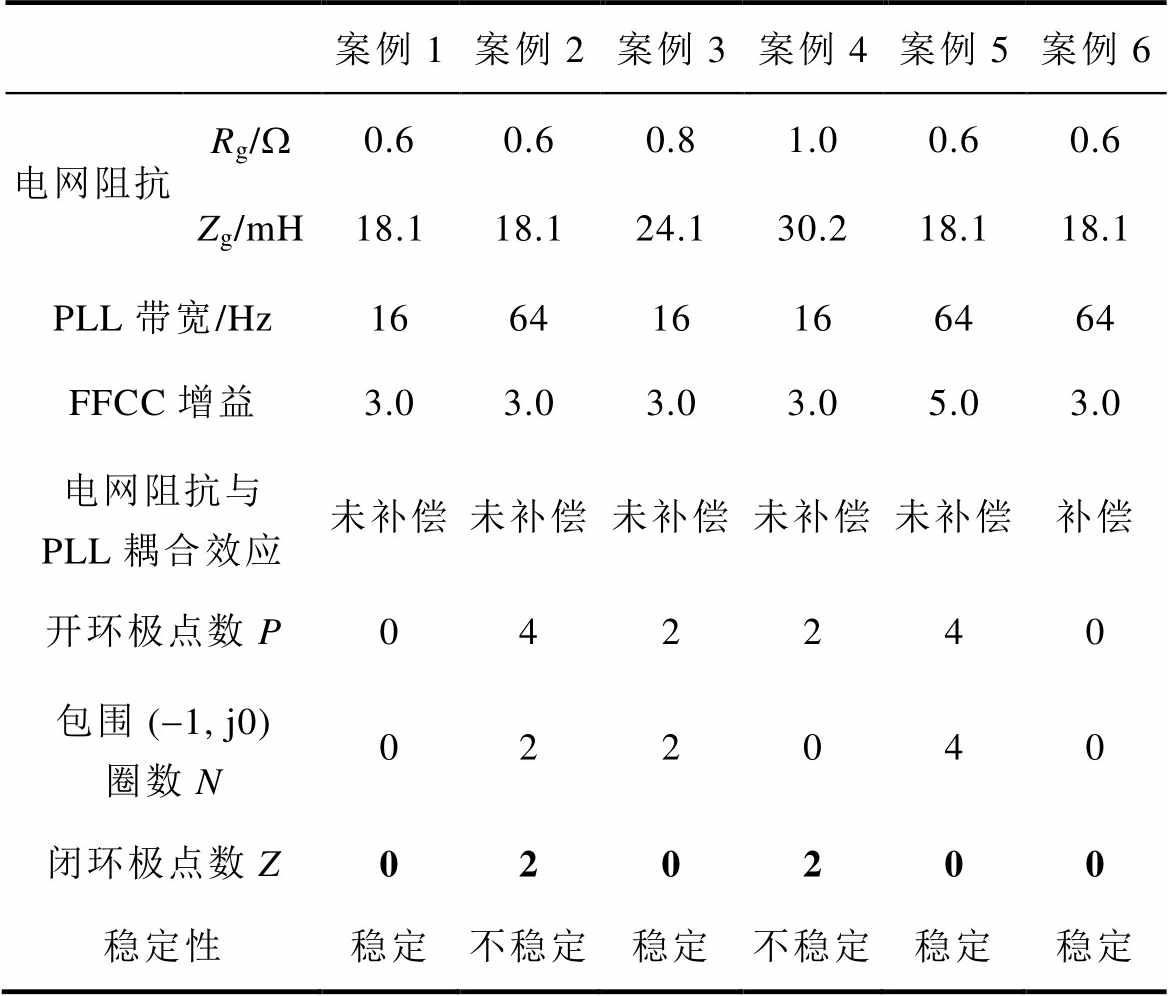
案例1案例2案例3案例4案例5案例6 电网阻抗Rg/W0.60.60.81.00.60.6 Zg/mH18.118.124.130.218.118.1 PLL带宽/Hz166416166464 FFCC增益3.03.03.03.05.03.0 电网阻抗与 PLL耦合效应未补偿未补偿未补偿未补偿未补偿补偿 开环极点数P042240 包围 (-1, j0)圈数N022040 闭环极点数Z020200 稳定性稳定不稳定稳定不稳定稳定稳定
因此,综合图10~图16的分析结果和表2可以发现:
(1)在弱电网条件下,电网阻抗与PLL之间的耦合效应加剧了MMC功率级电路动态与控制器动态之间的交互作用,这容易引起并网MMC系统稳定性问题。
(2)通过增加FFCC增益可以缓解这种潜在的失稳问题,而消除电网阻抗与PLL耦合效应能够彻底消除其引起的并网MMC系统失稳问题。
为了验证理论分析的正确性,在实验室搭建了一套并网MMC系统的控制器硬件在环实验平台,相关的系统参数与表1所列参数一致。并网MMC系统的HIL实验平台的实现方案如图17所示。HIL实验平台使用实时数字仿真平台RT-Lab(OP5607)基于数字信号处理器(TI DSP TMS320F-28335)控建立并网MMC系统的物理电路模型,控制系统由制板的外部物理控制器实现,系统的采样频率为10 kHz。
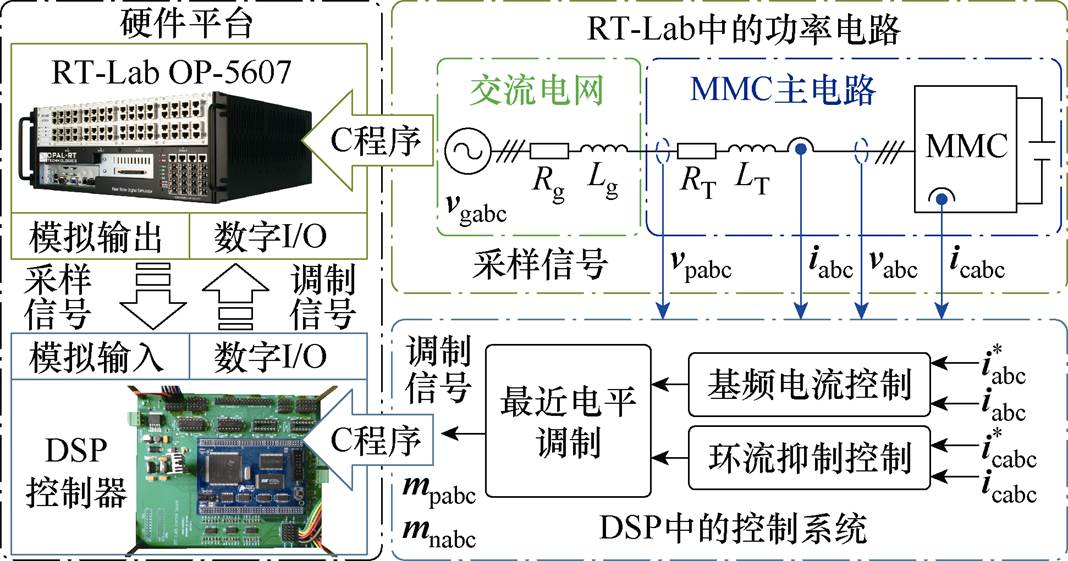
图17 并网MMC系统的硬件在环实验平台实现方案
Fig.17 Implementation scheme of HIL experiment platform for grid-connected MMC systems
图18~图20为验证电网阻抗与PLL耦合效应对并网MMC系统稳定性的影响机制分析结果的实验波形。
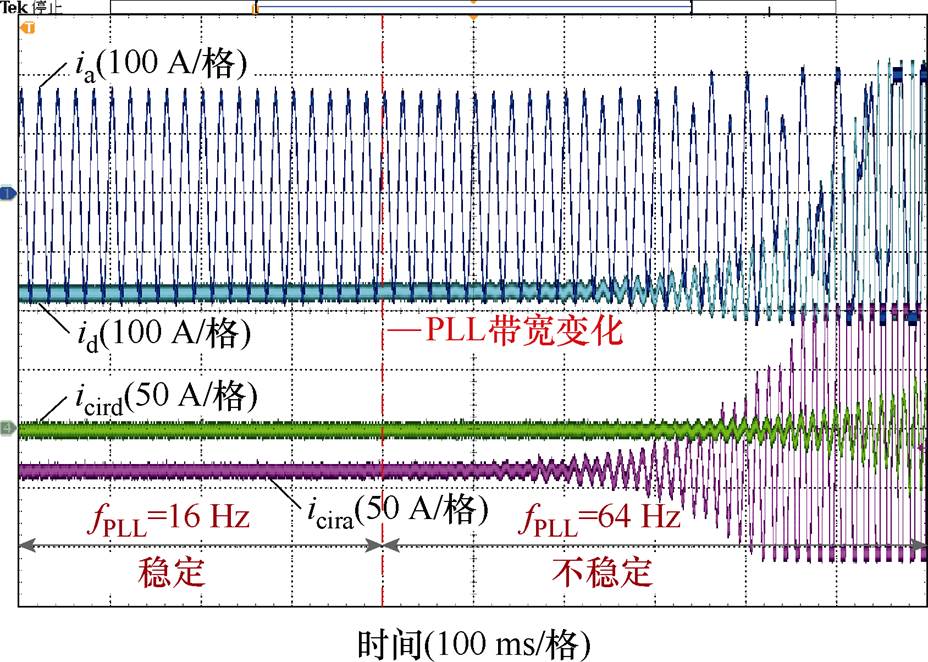
图18 PLL控制带宽变化对系统稳定性影响的实验结果
Fig.18 Experimental results on the effect of PLL control bandwidth variation on system stability
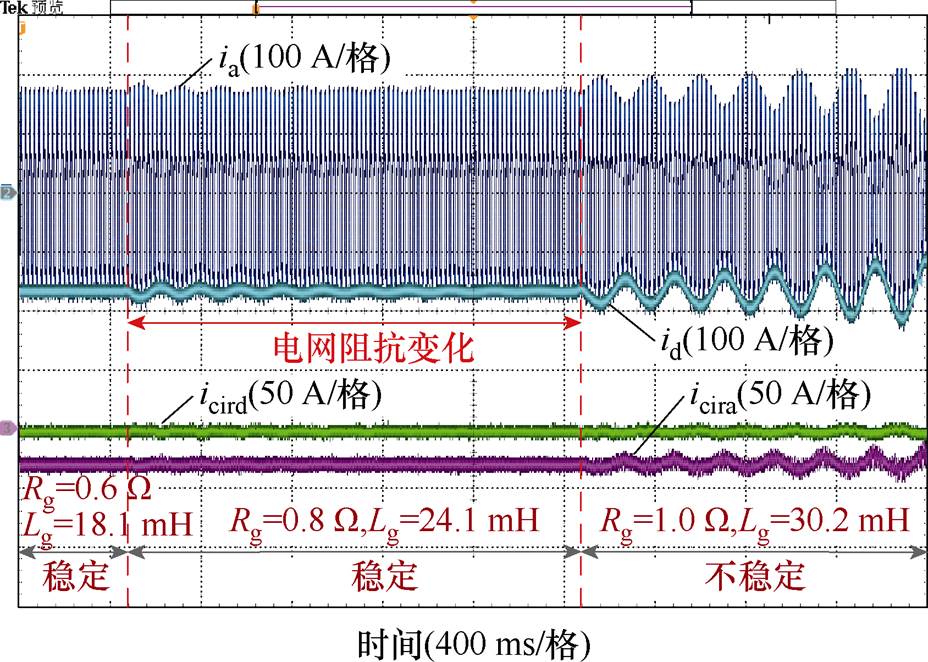
图19 电网阻抗变化趋势对系统稳定性的影响
Fig.19 Experimental results of Impact of grid impedance variation trends on system stability
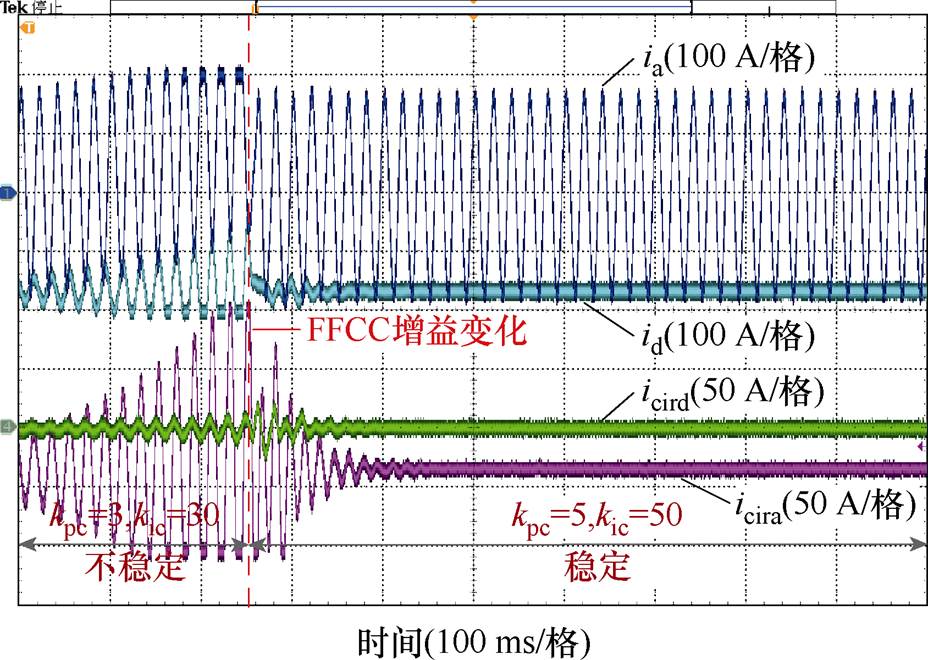
图20 增加FFCC增益来缓解电网阻抗与PLL耦合效应引起系统失稳的实验结果
Fig.20 Experimental results of increasing the FFCC gain to alleviate the system destabilization caused by the coupling effect between grid impedance and PLL
图18中,增加PLL带宽时,即fPLL从16 Hz增加为64 Hz,并网MMC系统输出电流与环流中出现振荡,系统不稳定。实验结果与图9和图10中的理论分析结果一致。
图19为电网阻抗变化对并网MMC系统稳定性影响的实验结果。实验结果表明,增大电网阻抗会降低并网MMC系统的稳定性。具体而言,当电网阻抗由初始的Rg=0.6 W,Lg=18.1 mH增加为Rg=0.8 W,Lg=24.1 mH时,系统出现轻微的弱阻尼振荡,这表明系统仍有足够的阻尼保持系统稳定,但稳定裕度很小;然而,当电网阻抗进一步增加为Rg=1.0 W,Lg=30.2 mH时,系统出现低频失稳现象。实验结果与图11所示的电网阻抗变化趋势对系统稳定性的影响分析结果一致。
图20所示为增加FFCC增益来缓解电网阻抗与PLL耦合效应引起系统失稳问题的实验结果。在高带宽PLL控制,且FFCC的控制器参数设为kpc=3、kic=30时,并网MMC系统是不稳定的;增加FFCC增益,即kpc=5、kic=50之后,输出电流与环流重新稳定。实验结果与图11和图12中的理论分析结果一致。
图21是通过补偿电网阻抗与PLL之间的耦合回路彻底消除其引起失稳问题的实验结果。实验结果表明,在消除了电网阻抗与PLL耦合效应后,PLL控制带宽变化不再影响并网MMC系统的稳定性。输出电流与环流始终能保持稳定,与图16的理论分析结果一致。
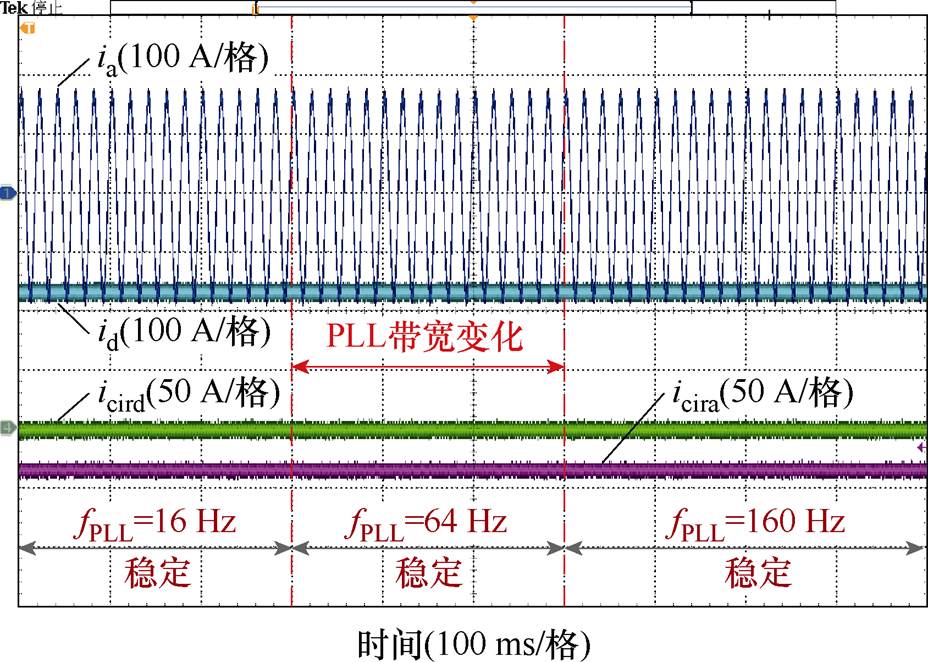
图21 消除电网阻抗与PLL的耦合效应提升稳定性的实验结果
Fig.21 Experimental results of eliminating the coupling effect between grid impedance and PLL to enhance stability
针对在弱电网条件下PLL同步的并网MMC系统中存在交互机理不清晰和小信号稳定性问题,本文提出了刻画电网阻抗、PLL、FFCC和CCSC交互作用的小信号传递函数模型,揭示了弱电网下电网阻抗与PLL耦合效应引起并网MMC系统的失稳机制。通过对比分析,可以得出以下结论:
1)弱电网下电网阻抗与PLL耦合效应在系统等效环路增益中引入了RHP极点,这可能会造成并网MMC系统不稳定;当系统等效环路增益的幅值不足时,并网MMC系统失稳。
2)通过增加FFCC增益可以缓解由电网阻抗与PLL耦合效应引起的失稳问题,但要彻底消除这种潜在的失稳问题,则需要通过设计环路补偿方案消除电网阻抗与PLL耦合效应。
3)结合等效环路增益的零极点与频域特性的稳定性分析方法可以解决传统阻抗稳定性分析方法中要求子系统无RHP极点的约束条件问题,所提方法的分析结果不存在保守性问题。
参考文献
[1] 鲁晓军, 林卫星, 向往, 等. 基于模块化多电平换流器的直流电网小信号建模[J]. 中国电机工程学报, 2018, 38(4): 1143-1156, 1292.
Lu Xiaojun, Lin Weixing, Xiang Wang, et al. Small signal modeling of MMC-based DC grid[J]. Pro- ceedings of the CSEE, 2018, 38(4): 1143-1156, 1292.
[2] 易灵芝, 黄晓辉, 黄守道, 等. 基于最近电平逼近调制的模块化多电平变换器中高压变频调速系统运行控制[J]. 电工技术学报, 2020, 35(6): 1303- 1315.
Yi Lingzhi, Huang Xiaohui, Huang Shoudao, et al. A medium-voltage motor drive with modular multilevel converter based on nearest level modulation[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1303-1315.
[3] 武鸿, 王跃, 薛英林, 等. 适用多功率的最近电平调制下MMC子模块开路故障诊断策略[J]. 电工技术学报, 2024, 39(1): 233-245, 302.
Wu Hong, Wang Yue, Xue Yinglin, et al. A diagnosis strategy for open-circuit submodule faults in MMCs under nearst level modulation suitable for different powers[J]. Transactions of China Electrotechnical Society, 2024, 39(1): 233-245, 302.
[4] 赵崇滨, 姜齐荣, 冯海全, 等. 基于MMC的背靠背异步联网系统宽频带频率耦合阻抗模型及小信号稳定性分析[J]. 中国电机工程学报, 2023, 43(10): 3691-3704.
Zhao Chongbin, Jiang Qirong, Feng Haiquan, et al. Frequency-coupling impedance model and small- signal stability analysis of the MMC-based back- to-back asynchronous grid interconnection system[J]. Proceedings of the CSEE, 2023, 43(10): 3691- 3704.
[5] 刘计龙, 陈鹏, 肖飞, 等. 面向舰船综合电力系统的10kV/2MW模块化多电平双向直流变换器控制策略[J]. 电工技术学报, 2023, 38(4): 983-997.
Liu Jilong, Chen Peng, Xiao Fei, et al. Control strategy of 10 kV/2 MW modular multilevel bidire- ctional DC-DC converter for vessel integrated power system[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 983-997.
[6] 吴丽丽, 茆美琴, 施永. 含主动限流控制的MMC- HVDC电网直流短路故障电流解析计算[J]. 电工技术学报, 2024, 39(3): 785-797.
Wu Lili, Mao Meiqin, Shi Yong. Analytical calcu- lation of DC short-circuit fault current in MMC- HVDC power grid with active current limiting control[J]. Transactions of China Electrotechnical Society, 2024, 39(3): 785-797.
[7] 张国驹, 裴玮, 杨鹏, 等. 中压配电网柔性互联设备的电路拓扑与控制技术综述[J]. 电力系统自动化, 2023, 47(6): 18-29.
Zhang Guoju, Pei Wei, Yang Peng, et al. Review on circuit topology and control technology of flexible interconnection devices for medium-voltage dis- tribution network[J]. Automation of Electric Power Systems, 2023, 47(6): 18-29.
[8] Khazaei J, Beza M, Bongiorno M. Impedance analysis of modular multi-level converters connected to weak AC grids[J]. IEEE Transactions on Power Systems, 2018, 33(4): 4015-4025.
[9] 李光辉, 王伟胜, 刘纯, 等. 直驱风电场接入弱电网宽频带振荡机理与抑制方法(一): 宽频带阻抗特性与振荡机理分析[J]. 中国电机工程学报, 2019, 39(22): 6547-6562.
Li Guanghui, Wang Weisheng, Liu Chun, et al. Mechanism analysis and suppression method of wideband oscillation of PMSG wind farms connected to weak grid (part Ⅰ): analysis of wideband impe- dance characteristics and oscillation mechanism[J]. Proceedings of the CSEE, 2019, 39(22): 6547-6562.
[10] Gu Tianming, Wang Puyu, Liu Dingyuan, et al. Modeling and small-signal stability analysis of doubly-fed induction generator integrated system[J]. Global Energy Interconnection, 2023, 6(4): 438-449.
[11] Harnefors L, Bongiorno M, Lundberg S. Input- admittance calculation and shaping for controlled voltage-source converters[J]. IEEE Transactions on Industrial Electronics, 2007, 54(6): 3323-3334.
[12] Wen Bo, Boroyevich D, Burgos R, et al. Analysis of D-Q small-signal impedance of grid-tied inverters[J]. IEEE Transactions on Power Electronics, 2016, 31(1): 675-687.
[13] Huang Linbin, Xin Huanhai, Li Zhiyi, et al. Grid- synchronization stability analysis and loop shaping for PLL-based power converters with different reactive power control[J]. IEEE Transactions on Smart Grid, 2020, 11(1): 501-516.
[14] 吴广禄, 周孝信, 王姗姗, 等. 柔性直流输电接入弱交流电网时锁相环和电流内环交互作用机理解析研究[J]. 中国电机工程学报, 2018, 38(9): 2622- 2633, 2830.
Wu Guanglu, Zhou Xiaoxin, Wang Shanshan, et al. Analytical research on the mechanism of the interaction between PLL and inner current loop when VSC-HVDC connected to weak grid[J]. Proceedings of the CSEE, 2018, 38(9): 2622-2633, 2830.
[15] Lü Jing, Zhang Xin, Cai Xu, et al. Harmonic state- space based small-signal impedance modeling of a modular multilevel converter with consideration of internal harmonic dynamics[J]. IEEE Transactions on Power Electronics, 2019, 34(3): 2134-2148.
[16] 李探, Aniruddha MGole, 赵成勇. 考虑内部动态特性的模块化多电平换流器小信号模型[J]. 中国电机工程学报, 2016, 36(11): 2890-2899.
Li Tan, Gole Aniruddha M, Zhao Chengyong. Small- signal model of the modular multilevel converter considering the internal dynamics[J]. Proceedings of the CSEE, 2016, 36(11): 2890-2899.
[17] 涂春鸣, 邹凯星, 高家元, 等. 基于不对称正负反馈效应的PQ功率控制并网逆变器稳定性分析[J]. 电工技术学报, 2023, 38(2): 496-509.
Tu Chunming, Zou Kaixing, Gao Jiayuan, et al. Stability analysis of grid-connected inverter under PQ power control based on asymmetric positive-negative- feedback effects[J]. Transactions of China Electro- technical Society, 2023, 38(2): 496-509.
[18] Xu Zigao, Li Binbin, Li Shengyuan, et al. MMC admittance model simplification based on signal-flow graph[J]. IEEE Transactions on Power Electronics, 2022, 37(5): 5547-5561.
[19] 潘子迅, 杨晓峰, 赵锐, 等. 不平衡电网下模块化多电平换流器的直流环流均衡策略[J]. 电工技术学报, 2024, 39(2): 541-553.
Pan Zixun, Yang Xiaofeng, Zhao Rui, et al. DC circulation equalization strategy of modular multi- level converter in unbalanced power grid[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(2): 541-553.
[20] Sakinci Ö C, Beerten J. Generalized dynamic phasor modeling of the MMC for small-signal stability analysis[J]. IEEE Transactions on Power Delivery, 2019, 34(3): 991-1000.
[21] 宗皓翔, 吕敬, 张琛, 等. MMC多维阻抗模型及其在风场–柔直交互稳定分析中的应用[J]. 中国电机工程学报, 2021, 41(14): 4941-4953.
Zong Haoxiang, Lü Jing, Zhang Chen, et al. MIMO impedance model of MMC and its application in the wind farm-HVDC interaction stability analysis[J]. Proceedings of the CSEE, 2021, 41(14): 4941-4953.
[22] Zhu Shu, Qin Liang, Liu Kaipei, et al. Impedance modeling of modular multilevel converter in D-Q and modified sequence domains[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2022, 10(4): 4361-4382.
[23] 吕敬, 蔡旭, 张占奎, 等. 海上风电场经MMC- HVDC并网的阻抗建模及稳定性分析[J]. 中国电机工程学报, 2016, 36(14): 3771-3781.
Lü Jing, Cai Xu, Zhang Zhankui, et al. Impedance modeling and stability analysis of MMC-based HVDC for offshore wind farms[J]. Proceedings of the CSEE, 2016, 36(14): 3771-3781.
[24] 王燕宁, 郭春义, 王烨. 控制系统对两端MMC- HVDC系统小信号稳定性的影响[J]. 电工电能新技术, 2019, 38(10): 20-31.
Wang Yanning, Guo Chunyi, Wang Ye. Impact of control system on small-signal stability of two- terminal MMC-HVDC system[J]. Advanced Tech- nology of Electrical Engineering and Energy, 2019, 38(10): 20-31.
[25] Wang Xiongfei, Blaabjerg F. Harmonic stability in power electronic-based power systems: concept, modeling, and analysis[J]. IEEE Transactions on Smart Grid, 2019, 10(3): 2858-2870.
[26] Gong Hong, Wang Xiongfei, Harnefors L. Rethinking current controller design for PLL-synchronized VSCs in weak grids[J]. IEEE Transactions on Power Electronics, 2022, 37(2): 1369-1381.
[27] 吴广禄, 王姗姗, 周孝信, 等. VSC接入弱电网时外环有功控制稳定性解析[J]. 中国电机工程学报, 2019, 39(21): 6169-6183.
Wu Guanglu, Wang Shanshan, Zhou Xiaoxin, et al. Analytical analysis on the active power control stability of the weak grids-connected VSC[J]. Pro- ceedings of the CSEE, 2019, 39(21): 6169-6183.
[28] Leng Minrui, Zhou Guohua, Li Haoze, et al. Impedance-based stability evaluation for multibus DC microgrid without constraints on subsystems[J]. IEEE Transactions on Power Electronics, 2022, 37(1): 932-943.
[29] Samanes J, Urtasun A, Barrios E L, et al. Control design and stability analysis of power converters: the MIMO generalized Bode criterion[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(2): 1880-1893.
[30] Chen Feifan, Zhao Liang, Harnefors L, et al. Enhanced Q-axis voltage-integral damping control for fast PLL-synchronized inverters in weak grids[J]. IEEE Transactions on Power Electronics, 2024, 39(1): 424-435.
[31] Harnefors L, Kukkola J, Routimo M, et al. A universal controller for grid-connected voltage-source converters[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(5): 5761-5770.
Abstract Modular multilevel converters (MMCs) are one of the most promising solutions for integrating renewable energy sources from remote areas into the AC grid. However, the high impedance of long-distance transmission lines causes challenges to the stability of grid-connected MMC systems under a weak grid. Although the interaction of two-level voltage source converters with weak grids and their stability issues have been intensively studied recently, these results are not applicable to grid-connected MMC systems because of the internal dynamic characteristics of MMC. In addition, there are significant coupling effects between these internal dynamics and the AC-side and DC-side output variables. Therefore, the stability of grid-connected MMC systems under a weak grid, especially the ambiguity of the system interaction mechanism and the small-signal stability, still needs further in-depth research. This paper proposes a small-signal transfer function model to describe the interaction between grid impedance, phase-locked loop (PLL), fundamental frequency current control (FFCC), and circulating current suppression control. The instability mechanism of grid-connected MMC systems caused by the coupling effect of grid impedance and PLL under a weak grid is revealed.
First, for the circuit topology and average value model of the grid-connected MMC system, this paper uses the vector representation method of common- and differential-mode signals to construct the basic circuit equations. Then, through coordinate transformation, a linearizable time-varying model of MMC in a synchronous rotating dq coordinate system is established, and the small-signal transfer function model of the grid-connected MMC system is derived. It is found that under the weak grid, the coupling effect between grid impedance and PLL is the key factor affecting the stability of grid-connected MMC systems, and its mechanism is mainly analyzed through the system equivalent loop gain. Then, this paper proposes an analysis method combined with the transfer function zero-pole analysis and the frequency domain characteristics. The results show that the coupling effect of grid impedance and PLL introduces a right half-plane pole in the system equivalent loop gain, thereby destroying the system stability. This potential instability problem can be alleviated by increasing the gain of FFCC. A loop compensation scheme is designed to eliminate the coupling effect between grid impedance and PLL and solve the right half-plane pole problem, thereby improving the stability of grid-connected MMC systems.
The following conclusions can be drawn. (1) Under a weak grid, the coupling effect of grid impedance and PLL introduces right half-plane poles in equivalent loop gain, which is the main reason for the instability of the grid-connected MMC system. (2) Increasing the gain of FFC can alleviate the instability caused by the coupling effect of grid impedance and PLL. An effective loop compensation scheme must be designed to eliminate this potential instability problem. (3) The stability analysis method combining the zero-pole analysis of equivalent loop gain with the frequency domain characteristics can effectively solve the subsystem’s stability problem and overcome the limitations of the traditional impedance stability analysis method.
keywords:Weak grid, modular multilevel converter (MMC), grid impedance, phase locked loop (PLL), coupling effect, stability
DOI: 10.19595/j.cnki.1000-6753.tces.240180
中图分类号:TM46
国家自然科学基金(52125705, 52207202)、国家自然科学基金青年科学基金(52307201)、中国博士后科学基金(2022M721082)和湖南省重点研发计划(2023GK2010)资助项目。
收稿日期 2024-01-26
改稿日期 2024-05-27
吴向阳 男,1993年生,博士研究生,研究方向为电力电子化电力系统的稳定性分析。E-mail: wuxy@hnu.edu.cn
李 杨 男,1991年生,讲师,研究方向为电能质量控制和电力电子技术及应用等。E-mail: mydygyx@163.com(通信作者)
(编辑 陈 诚)