图1 全桥三端口变换器拓扑
Fig.1 Full-bridge three-port converter
摘要 脉冲功率型负载广泛应用于地面、舰船及航空供电系统,其频率变化具有难以预测的随机性。传统双环PI控制下系统调节时间缓慢、电压纹波较大、动态性能有待提高。为提高系统在脉冲频率变化时的动态响应能力,该文基于三端口脉冲功率解耦-整流器提出电容能量平衡控制方法。首先,介绍三端口整流器的工作原理,指出传统双环PI控制面临负载频率突变时存在动态调节性能不佳这一局限性;其次,针对脉冲负载的特殊性质,分析传统电容电荷平衡控制不能直接应用于脉冲负载的原因,并提出快速补偿能量差值的电容能量平衡控制方法,提高三端口整流器的动态调节能力;最后,通过实验验证所提控制方法的可行性。当检测到脉冲负载频率突增时,采用所提控制策略可以快速地控制解耦电容电压达到新的稳态值,减小解耦电容的电压纹波,有效优化系统的动态性能。
关键词:脉冲负载 功率解耦 频率突变 能量平衡控制 动态响应
多电/全电飞机将飞机的二次能源统一为电能,进一步改善了飞机的技术和战术性能,为航空电子设备的发展提供了电能保障[1]。其用电负载类型相较于常规负载更为复杂多样,以电磁发射系统[2]和雷达机为代表的某些航空电子设备为短时周期性或非周期性重复的用电设备,体现了强非线性特点。雷达机的收/发(T/R)组件作为周期性非恒功率负载,具有平均功率低、峰值功率高和脉冲频率不固定的特点[3-4],高峰均比特性将会对前级变换器和交流源造成非常大的周期性冲击,为供电系统的稳定运行带来各种各样的问题[5-7]。
二极管不控整流电路由于结构简单、可靠性高等特点,目前仍作为主要的交直流变换器应用于脉冲负载供电系统当中。但其不具备功率调控能力时,前级交流侧会产生较大的谐波电流以及由脉冲负载启动引起的脉冲电流,使得供电系统的电能质量受到严重影响。随着电力电子技术的发展,功率电子器件的性能不断优化,三相PWM整流技术已日趋成熟,在多个场合都得到了重要的应用[8-10]。但传统的有源AC-DC变换器由于控制目标的不同,难以直接应用于脉冲功率系统当中[11]。文献[11]对三相交直流脉冲负载供电系统做了较为详细的研究,其中提出了三端口脉冲功率解耦-整流变换器的概念(简称三端口整流器)。三端口整流器全部采用可控器件,通过削峰填谷的功率分配思想,将负载电流脉冲引起的波动转移至动态端口的电容处,允许电容电压在一定范围内与脉冲负载频率同步波动,实现功率解耦。而稳态端口负责传输脉冲负载的谷值功率,提供稳定的直流电压,确保负载的正常工作。文献[12]提出了一种面向低频脉冲负载的电能综合补偿器,在无源整流电路基础上并联所提补偿器,消除高峰均比低频脉动功率对交流源造成的负面影响。整体来看,上述对于脉冲负载的研究,本质上都是基于功率解耦的思想平衡功率差值。通过允许解耦电容宽范围的波动转移脉冲负载对前级产生的影响,并降低了输出电容容值[13],取得了较好的研究成果。
然而正如上述所言,低频周期性脉冲负载具有脉冲频率不固定的特点。当负载脉冲电流频率变化时,单个脉冲周期内负载所需的平均功率发生改变,此时解耦电容电压需要根据脉冲频率的上升或下降相应地改变充放电频率,以此来适应变化的负载功率差值。当脉冲频率突增时,解耦电容因需要在更短的充电周期内多次放电,电压会大幅度跌落,严重时会引起稳态端口的直流电压随之波动;而当频率突减时,解耦电容会在下一时刻脉冲到来前持续充电,造成较大的过冲电压,对解耦电容造成损害。频率突变会打破解耦电容在稳态时已建立好的能量平衡,使电容在突变后的几个脉冲周期内充放电不等,引发电容电压的宽范围波动,影响系统的正常运行[14]。因此,脉冲负载的这一特殊性质,不仅要求脉冲供电系统在恒定频率时具有较好的稳态控制精度,对系统的动态控制能力也提出了更高的要求。
针对脉冲频率突变时动态补偿性能不佳的情况,文献[15]对文献[12]中所提综合补偿器的拓扑形式和动态过程的控制方法做出了优化,提出了电流基准前馈控制和电压限幅控制两种控制策略。通过计算功率差值得到突变后新的补偿电流基准,同时对解耦电容电压波动的上下限进行限幅,减小了电压的波动范围,对补偿器的动态响应能力有一定的提升。除负载电流前馈外,还有多种控制方式可以提高变换器动态性能。基于瞬时功率理论,学者T. Ohnishi提出了应用于PWM整流器的直接功率控制(Direct Power Control, DPC)[16]。通过对有功和无功功率进行滞环控制,得到对应的矢量开关表,具有控制结构简单、动态性能高的特点,并在后续得到了不断的优化发展[17-18]。除此之外,单周期控制(One Cycle Control, OCC)在整流拓扑[19-20]和永磁电机发电系统[21]中也得到了较为广泛的应用,其在一个开关周期内通过对占空比的控制,实现对电压电流平均值的控制和输入功率因数的校正,具有动态响应快、鲁棒性强等优点。上述控制方式在各自领域中,系统动态性能相较于双环PI控制虽然有所提升,但目前在脉冲负载供电系统当中还缺乏应用,并且控制系统的电压外环大多仍保留了PI控制。而PI控制的调节能力受到线性控制器自身的限制,往往不能以最快的速度响应负载的变化[22]。因此,在脉冲负载控制系统中,继续研究高动态性能的控制策略具有重要的意义。
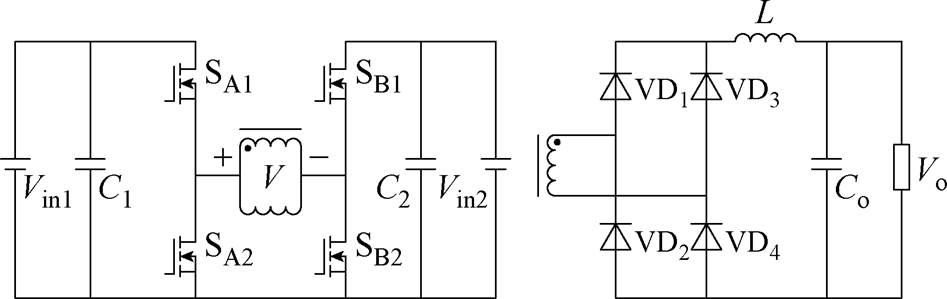
为进一步提高系统的动态响应能力,可以考虑在负载突变时采用非线性控制的方法加快系统响应时间。文献[22]首先提出了应用于Buck变换器当中的电容电荷平衡控制(Capacitor charge Balance Control, CBC),通过控制电感电流经过一次上升下降过程,使电容电荷在动态过程快速实现充放电平衡,以此快速恢复稳态。CBC的控制方式经过不断的完善,目前已经可以应用至其他DC-DC变换器[23-25]及全桥三端口变换器[26],其拓扑如图1所示(V为变压器两端电压),并在永磁电机控制领域继续得到推广。文献[27-29]通过机电类比,在磁通切换电机中提出并使用转矩冲量平衡控制方法,通过控制电磁转矩的快速变化,有效地提升了电机在切载时转速调节能力。CBC的控制思想对于提升三端口整流器动态性能具有参考价值,但在具体实现方式上,三端口整流器与已有拓扑之间存在较大的差异,主要体现在以下两方面:
图1 全桥三端口变换器拓扑
Fig.1 Full-bridge three-port converter
(1)传统DC-DC的CBC最优动态响应曲线在电路参数已知时便能唯一确定,控制过程相对简单。而三端口整流器的两个输出端口间存在功率解耦关系,二者的稳态电压和控制方式均不相同,这些因素都会影响系统的动态响应曲线,可能导致系统难以实现最优的控制效果。
(2)在CBC中,通过对电感电流的调节,最终使电容端电压在动态过程结束时保持不变,以此实现电荷平衡。但由于三端口整流器的输出端为脉冲负载,解耦端口的电压无论在稳态或动态均存在着周期性波动。表1从负载类型及控制角度,将三端口整流器和已成功实现过CBC的两种电路结构进行列表总结,对比了三者的异同点。
通过以上分析可知,三端口整流器虽然可以借鉴现有CBC的控制思想,但考虑到此时的变换器结构和负载类型都已和传统供电系统区别较大,因此,现有的CBC方案并不能直接应用到带脉冲负载的三端口供电系统中。
综上所述,为解决三端口整流器中动态调节能力受限的问题,本文研究了基于三端口整流器的电容能量平衡控制策略。首先,对供电系统拓扑及其控制方法进行简述,指出其在脉冲负载频率突变的情况下存在解耦端口电容电压脉动较大的问题。然后,具体介绍了电容能量平衡控制策略,通过求解电路参数得到变换器控制有功电流的作用时间,使得解耦电容通过一次充放电的过程就能重新回到稳态。最后,通过实验得出结论,验证所提控制方法的可行性与有效性。
表1 三种电路结构CBC对比
Tab.1 Comparison of three circuit structures used in CBC
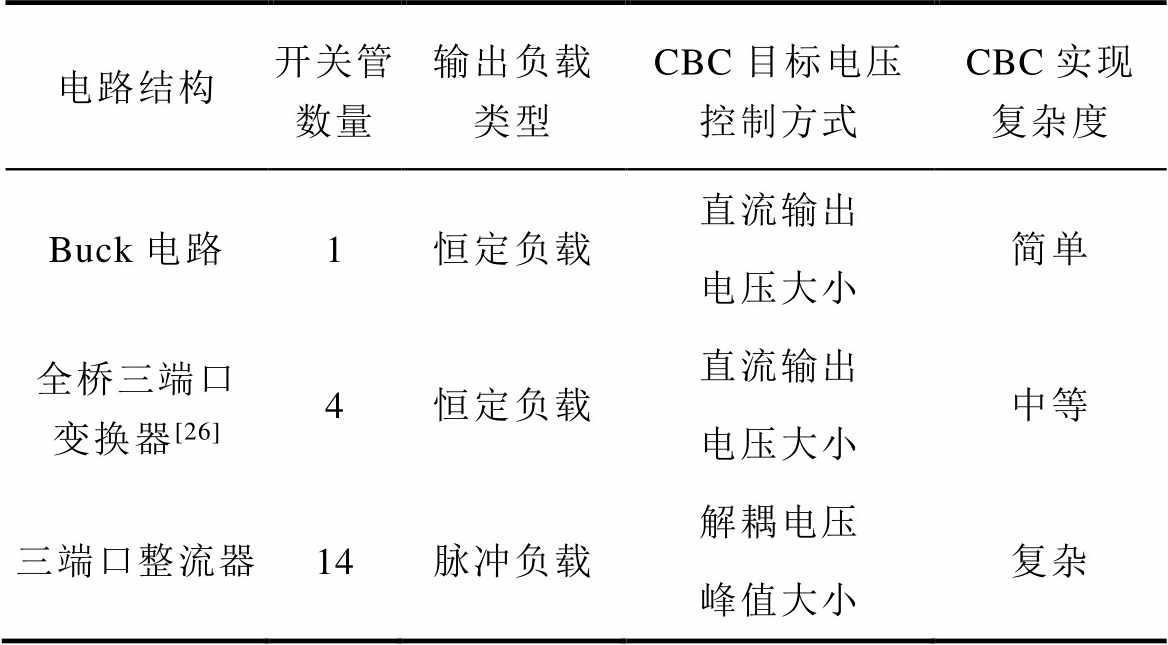
电路结构开关管数量输出负载类型CBC目标电压控制方式CBC实现复杂度 Buck电路1恒定负载直流输出电压大小简单 全桥三端口变换器[26]4恒定负载直流输出电压大小中等 三端口整流器14脉冲负载解耦电压峰值大小复杂
三端口整流器拓扑结构如图2所示。图中,vsx、Cx和Lx(x=a, b, c)分别为三相交流源电压、交流侧滤波电容和滤波电感。AC-DC部分采用功率开关管复用的方式,每相包含Sx1~Sx4四个开关管,通过发送合适的互补驱动信号将功率向两个直流端口传递。其中,电容Co所接端口负责传输负载所需稳态功率,解耦电容Cs接DC-DC变换器,在负载脉冲启动时传输动态功率,S1、S2和Lf分别为后级Buck电路的两个功率开关管和变换器电感。
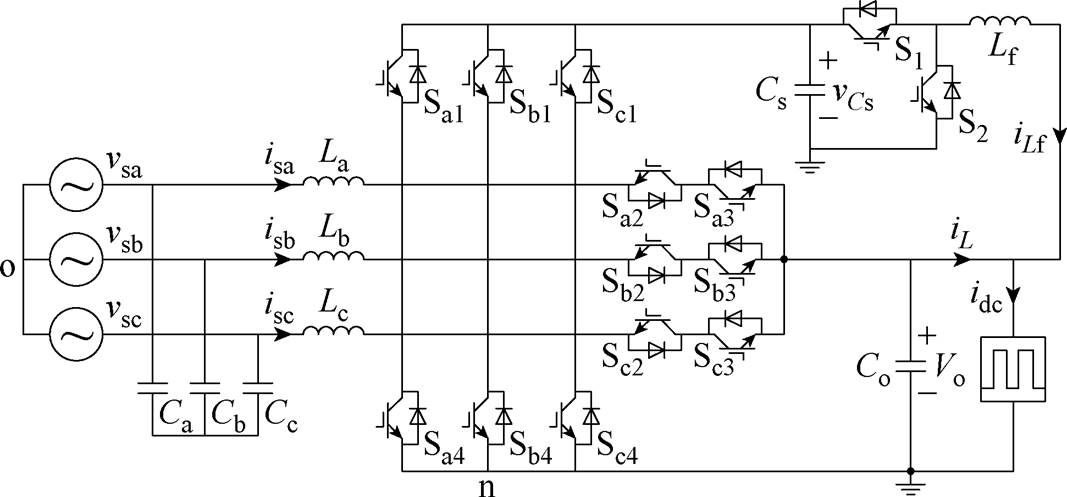
图2 三端口整流器拓扑结构
Fig.2 Three port rectifier topology
图3给出了三端口整流器稳态时的主要电压电流波形。图中,vCs和Vo分别为解耦端口和稳态端口的电压,isa为交流侧输入电流,idcmax和idcmin分别为脉冲电流峰值和谷值。在脉冲启动时刻,解耦电容放电,补偿脉冲电流峰值阶段产生的功率差值;脉冲停止时,解耦电容持续充电,为下一次脉冲启动储存能量。Buck电路连接两个输出端口,并保持稳态电压为恒定值,因此要确保vCs波动的电压最小值高于Vo。
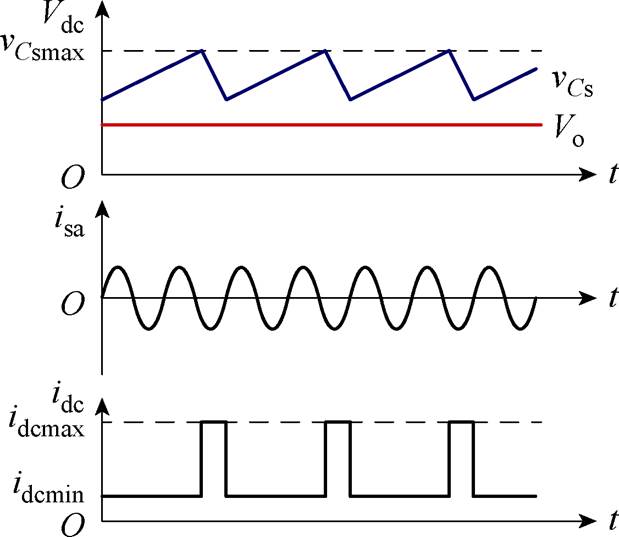
图3 稳态电压电流波形
Fig.3 Steady state voltage and current waveforms
三端口整流器的控制主要分为AC-DC控制、DC-DC控制和功率分配控制三部分。AC-DC控制采用传统的电压外环、电流内环的双PI控制。为了确保解耦电容能在脉冲启动时具有充足的能量来补偿功率差值,vCs采用峰值电压控制,通过峰值检测模块采集解耦电容电压最大值,与给定值比较后输入外环PI调节器,输出作为电流内环有功电流id的给定。DC-DC控制在传统双环PI控制基础上,对脉冲负载的瞬时电流idc与脉冲负载谷值电流idcn作差,将差值前馈以确保更好的电流跟踪效果。功率分配部分通过控制稳态端口电流控制输入功率,经PI调节后输出与端口切换频率fsw交截,并对其限幅在0~1之间,配合PWM以得到对应的驱动逻 辑[12]。系统整体控制框图如图4所示。
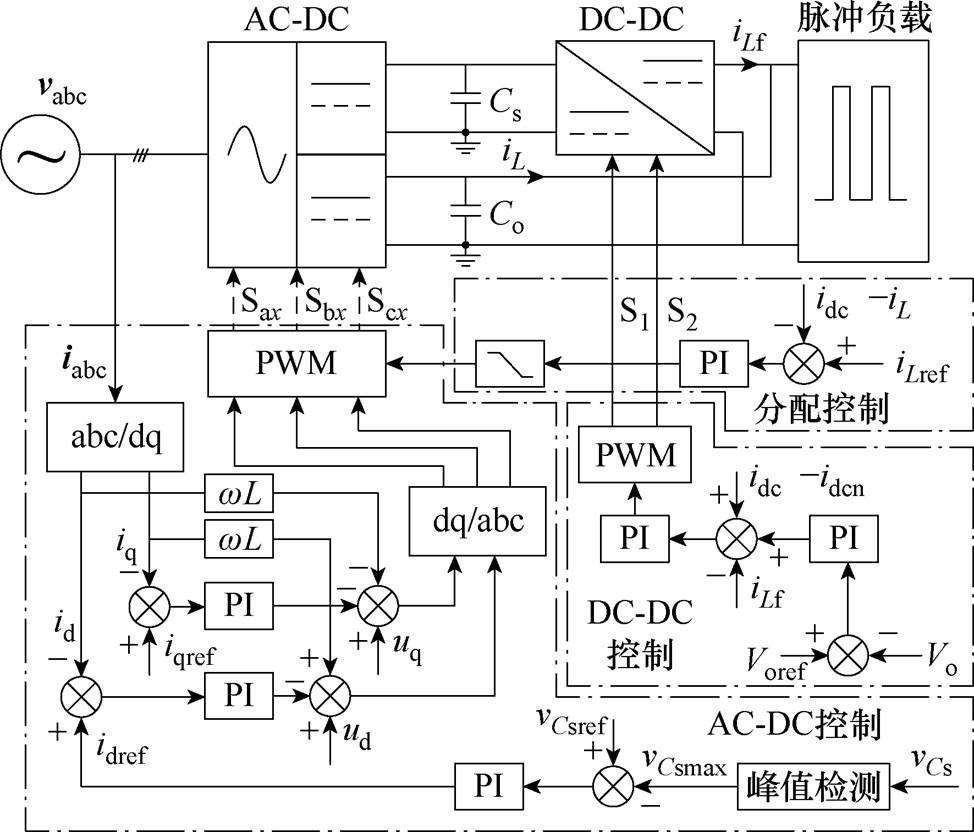
图4 系统控制框图
Fig.4 System control block diagram
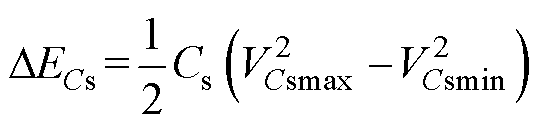
关于电容参数方面,在脉冲负载稳态运行时,单个脉冲周期内电容存储或释放的能量[11]表示为
 (1)
(1)
 (2)
(2)
式中,Phigh为脉冲负载启动时的峰值功率;Plow为脉冲负载谷值功率;Dp为脉冲占空比;Tp为一个脉冲周期持续时间。当电容能量值确定时,解耦电容Cs的大小与稳态电压纹波成反比。由于外环采用峰值控制,可以进一步等效为Cs与解耦电压最小值vCsmin成正比。解耦电容设计过小时,会导致系统稳态电压纹波较大,受频率变化产生的电压波动影响将尤为严重;而电容参数设计过大时将会影响系统的动态调节能力。根据式(1)、式(2),考虑功率器件耐压、脉冲负载的功率等级和电容体积质量等相关因素,需要对解耦电容Cs大小和电压外环峰值控制的给定值进行合理的取值设计。本文具体采用的电容参数将在第2节理论分析部分给出。
在Matlab/Simulink中对系统进行仿真。其中,解耦电容电压峰值给定vCsref=40 V,稳态端口电压给定Voref=10 V,脉冲负载稳态时频率设定为12.5 Hz,待系统稳定后,在2.0 s时令脉冲频率增加为25 Hz。系统全程采用PI控制,通过改变峰值电压环的PI参数得到动态过程不同的控制效果,仿真波形如图5所示。
图5a~图5c为三组不同外环PI参数下脉冲频率突增的仿真波形。观察电压峰值变化轨迹曲线,可以发现其基本等同于二阶系统的三种典型情况。图5a和图5b动态过程中无超调,但响应缓慢;欠阻尼状态下存在一定量的超调,且同样需要较长时间才能回到稳态。不同外环PI参数下系统动态过程的调节效果均有所不同,这使得系统难以获得最佳的调节效果来应对频率变化造成的影响。
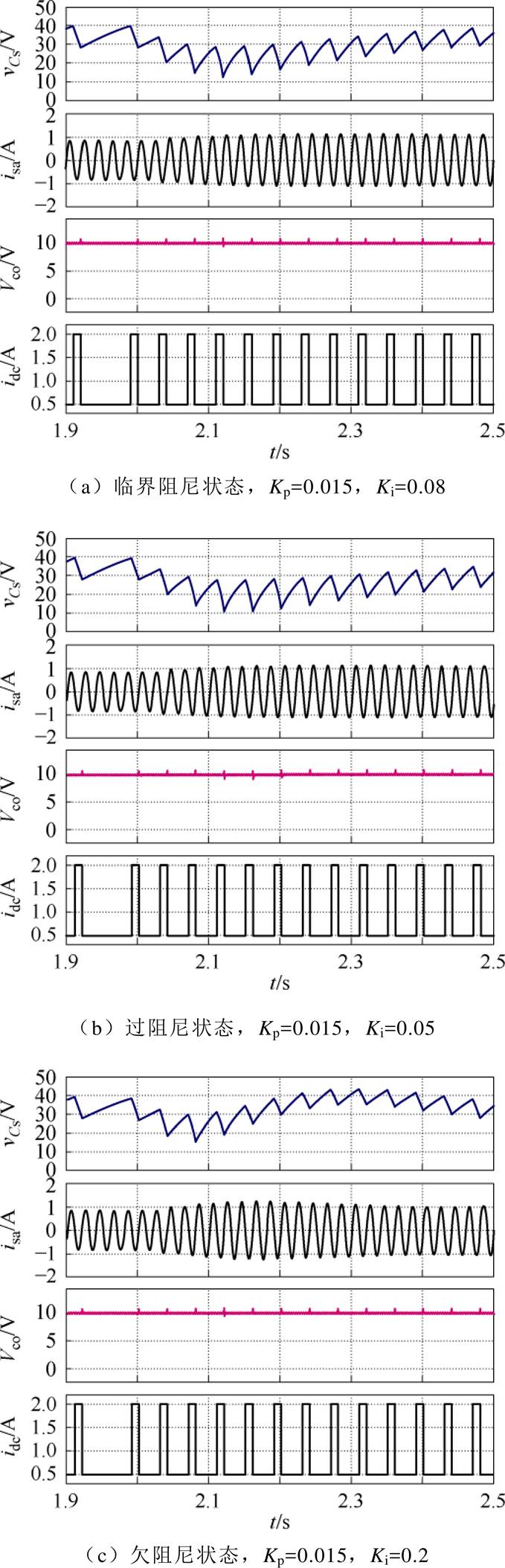
图5 三端口整流器PI仿真波形
Fig.5 The simulation waveforms of PI control of three port rectifier
从控制系统自身角度考虑,外环的带宽一般远低于内环[30]。由于峰值电压控制环路需要减轻其对后级电流环的影响,实现较小的输出脉动以得到稳定的有功电流参考,其带宽应当低于脉冲负载的最小工作频率。而低频脉冲负载频率本身较低,这使得实际峰值电压外环的带宽要比一般双环PI控制中的外环带宽更小,令系统在动态过程中响应更加缓慢,从而增大了对动态性能的影响。
由此可见,传统PI控制在脉冲频率变化时,其动态调节能力受到控制器及低频脉冲负载自身特点的影响难以达到最佳,调节时间过长,具有进一步提升的必要。
为解决传统PI控制不能保证在脉冲负载频率突变时系统达到最佳的动态控制效果这一问题,借鉴CBC的思想,本文提出了能量平衡控制(Capacitor Energy Balance Control, CEBC)以提升切载时的动态响应能力。
传统的电容电荷平衡控制原理如图6所示。图6中,SA为动态过程电容放电量,SB、SC分别为电感电流上升和下降时电容的充电量。系统在动态调节过程中,当同时满足输出端电容释放和补充的电荷相等,且输出电感电流iLo与负载突变后的给定iLo2_ref也相等时,可认为系统回到稳态。CBC通过已有参数计算得到电感电流iLo的上升下降时间,发送控制信号使功率管以满占空比在对应时间段工作,实现最快的动态恢复效果。
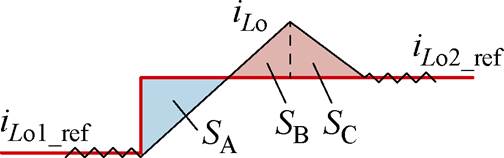
图6 传统CBC的动态响应
Fig.6 Dynamic response of traditional CBC
引言中已经说明,由于脉冲负载的特殊性,现有CBC方案并不能直接应用在三端口整流器,二者本质不同在于输出端口电容在电路中的功能不同。传统负载的输出端电容电压稳定,其动态调节过程前后的电压值保持不变;而解耦电容的作用是通过周期性充放电平衡功率差值,动态过程结束时,其最终控制目的是维持电压峰值不变。CBC的控制要点因此将发生改变,下面以脉冲负载频率突增为例进行具体分析。
图7给出了CEBC下系统关键波形。本文将两次峰值启动的时间间隔作为一个周期的判定依据,通过比较连续两次的脉冲周期大小判断频率是否突变。需要注意的是,如果从t-1时刻开始向后记一个周期与前一周期比较,脉冲频率相较之前实际已经发生变化,CEBC不可避免地会存在一个周期的延迟。但本文采取的方法可看作脉冲上升沿检测,系统若没有检测到连续两次脉冲启动间的周期差值,控制器将按照突变前的工况继续运行,分析时需注意突变时刻的判定条件。
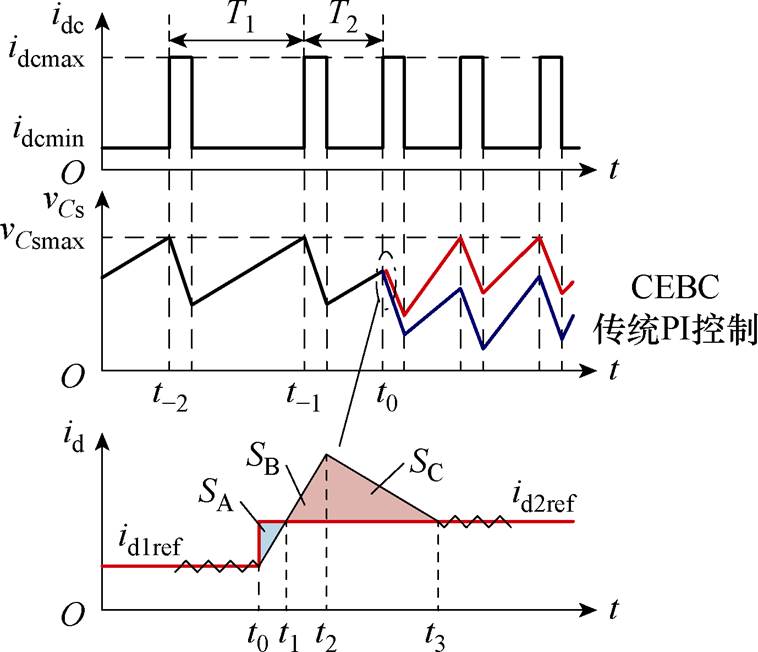
图7 CEBC下系统关键波形
Fig.7 Key waveforms of the system under CEBC
t0时刻,由T2<T1确定频率发生突变,系统在动态调节过程中切换至能量平衡控制。类比CBC思想,在动态过程结束时,系统的有功电流id与突变后的电流参考值id2ref相等。
 (3)
(3)
式中,k1和k2分别为动态过程中有功电流的上升和下降斜率;id1、id2分别为突变前、突变后的电流。脉冲频率的变化将会导致系统输出的平均功率发生变化,通过脉冲检测环节得到脉冲峰谷值的持续时间,计算可得频率变化前后的平均功率P1和P2。
CBC中,系统重回稳态的第二个条件为充电电荷等于放电电荷,在图6中可表示为
 (4)
(4)
在三端口整流器中,解耦电容电压外环采用峰值控制。由于频率突变的时刻不固定,突变时刻的vCs实际值可能是电容在充电过程中的任意值。如仅满足式(4),会使得电压峰值在控制结束后重回这一实际值大小,解耦电压在脉冲启动时刻将继续降低,vCs输出低于给定峰值大小,CBC实际上没有发挥作用,最终仍由PI控制器慢慢调节使其恢复稳态。因此,CEBC的控制要点在于,需要根据频率突变时刻vCs的实际大小在动态过程中增加一部分能量,确保交流源向解耦电容提供的能量能够使vCs峰值补偿至给定值,从而满足系统重回稳态后的电容能量平衡。
CEBC过程中,电容能量差值可表示为
 (5)
(5)
式中,vd为交流源输入电压直轴分量;id为变换器有功电流;id2ref为频率突变后有功电流的参考值;vCsmax和vCs分别为解耦电压的峰值给定值和实际值。积分项即动态过程中额外增加的电荷大小,因此对式(4)改写为
 (6)
(6)
式中,SA为动态过程电容放电量,可用带有斜率和时间的公式表示为
 (7)
(7)
SB和SC的面积之和同样可表示为
 (8)
(8)
式(6)即为CEBC下系统快速实现稳态的第二个条件。将式(3)和式(6)联立,并代入式(7)和式(8)的面积计算公式求解,即可得到动态过程中控制有功电流上升和下降的作用时间。
为具体分析电容参数对本文方法的影响,在第1节仿真中采用的功率等级下,结合式(5)、式(6)进行了数据分析。假定vCs在一个充电周期内线性上升,在此期间,分别在电压充至给定峰值过程的1/4处、1/2处和3/4处三个时刻进行频率突变,得到电容参数Cs与式(6)计算结果之间的关系如图8所示。
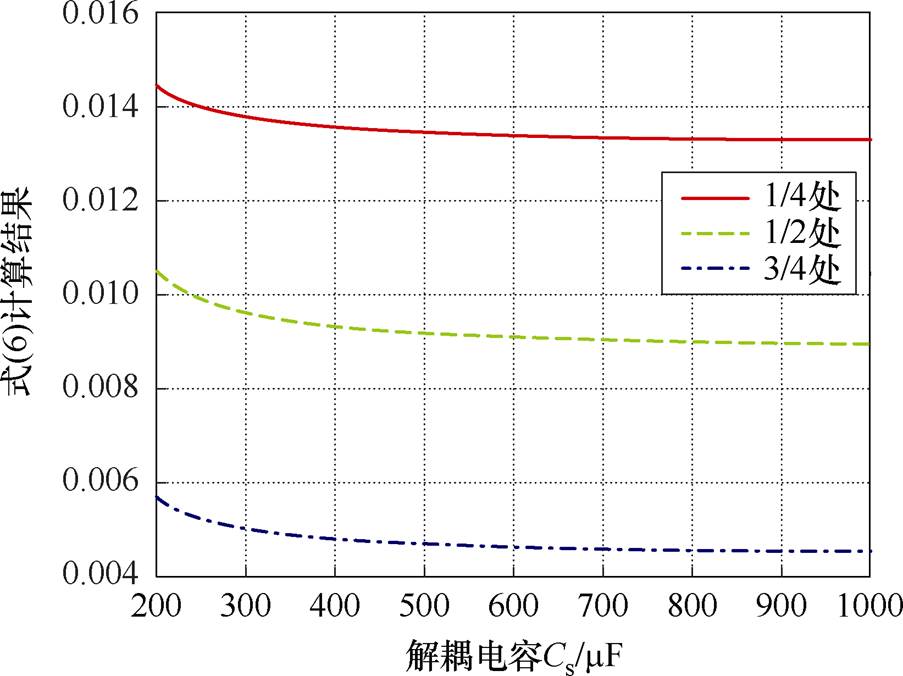
图8 Cs取值与式(6)计算结果关系
Fig.8 Relationship between Cs and the calculation of Equ.(6)
由于要满足vCsmin>Vo,根据式(5)计算,当前功率等级下解耦电容容值需要大于164 mF时,考虑频率突增产生的电压跌落,实际取值应更大一些。从图8中可见,在200~1 000 mF范围内,不同突变时刻的计算结果均会随Cs的增大而减小,最终趋于恒定。由于在式(6)计算过程中分子部分可看作电容容值与电压纹波相关量的乘积,当电容参数变化时并不会出现明显变化,并且需要与三相交流电压直轴分量vd相除,最终计算结果普遍较小。当Cs>300 mF时,所得结果受电容参数影响变化不大。并且由于有功电流斜率参数k1和k2相对较大,电容能量平衡控制的作用时间一般在ms或ms级,计算切换时间时,因电容变化对后续结果的影响近乎可以忽略不计。综合考虑其他因素,本文最终选择解耦电容大小为330 mF。
上述分析为CEBC的理论说明部分以及关键切换时间计算方法,其中所用的有功电流变化斜率k1和k2均按照最大值来取,以确保响应时间最快。下面通过对变换器进行分析,得到动态过程斜率的求解公式,进而说明CEBC的具体控制方法。
由三端口整流器工作原理可知,系统在稳态工作过程中,随着切换信号的变化,交流源向两个输出端口交替传输所需功率。每个端口工作时,AC- DC控制均可视为三相电压源整流器(Voltage Source Rectifier, VSR)工作,区别仅在于两个端口的后级所接负载不同。单独分析三相VSR数学模型,经推导后可得到有功电流斜率在dq旋转坐标系下的表达式为
 (9)
(9)
式中,ed为dq坐标系下d轴交流源电压值;Vcd为整流桥中点电压。为确保三相交流源输入电流正弦,在电流环控制中已经令无功电流参考为0,而滤波电感Ls一般为mH级,因此含有iq的乘积项相较于其他项要小很多,计算时可对其忽略。而串联等效电阻较小,同时因为脉冲供电系统输出的平均功率要远低于峰值功率,含有id的乘积项也可视为影响斜率的次要因素。保留对斜率影响较大的两项,对式(9)改写后得近似表达式为
 (10)
(10)
此时动态过程等效电路如图9所示。当ed和Ls确定时,可知斜率大小与直流侧电压Vdc有关。整流器工作在不同端口时,其大小分别为解耦电压vCs和稳态电压Vo。因此,在满足稳态端口电压恒定的条件下,为了得到最大的直流电压,需要在CEBC中令整流器持续工作在解耦端口,动态过程结束后再使其恢复。
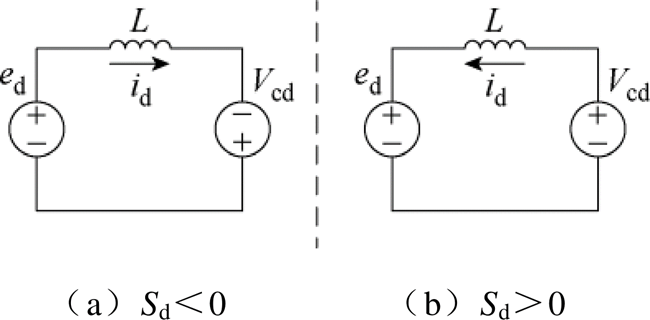
图9 动态过程等效电路
Fig.9 Equivalent circuit in dynamic process
因此,可根据式(10)分别计算出斜率k1和k2的大小,从而得到切换时间,再根据此时的锁相角,由开关状态表中选出当前状态下最优的开关序列,实现CEBC。动态过程结束后,系统切换回PI控制。
在三端口整流器仿真模型基础上加入CEBC,仿真条件同第1节,仿真结果如图10所示。可以看到,相比于图5中三组不同PI的调节结果,采用CEBC后电压峰值在频率突变后的第二个脉冲周期就可以回到稳态,调节时间大幅缩短。动态过程的电压跌落值也有效减小,电压纹波抑制效果较好。随后,在同等功率等级的条件下,分别将解耦电容容值改变至250 mF和500 mF,其他电路参数均不变,CEBC方法的对比仿真结果如图11所示。
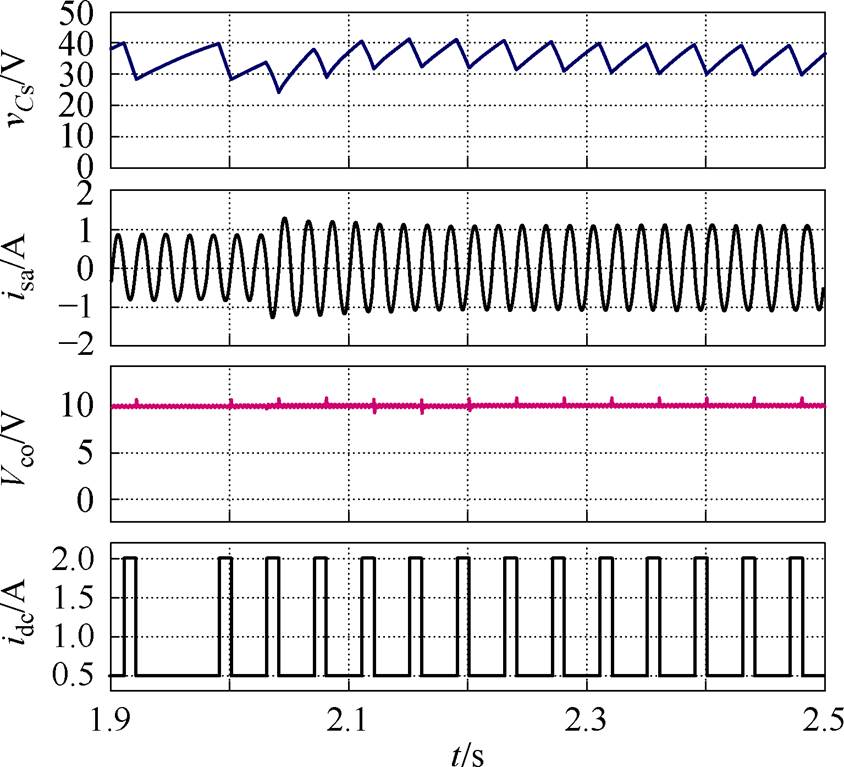
图10 三端口整流器CEBC仿真波形
Fig.10 The simulation waveforms of CEBC of three port rectifier
对比图10中的仿真,由于电容参数发生改变,vCs的稳态电压纹波随之发生改变。峰值电压一定时,根据式(1)、式(2)即可计算出不同电容参数下的vCs最小值。500 mF时稳态电压纹波最小,250 mF时最大。由于脉冲负载频率突变具有随机性,突变时刻的vCs也具有随机性,加之电容参数不同,使得每次CEBC的作用时间不完全相同。但与传统PI调节不同,在一定范围内,无论Cs大小如何变化,使用能量平衡控制后系统均可在频率突增后第二次脉冲到来时接近恢复至给定峰值,有效缩短调节周期。加入CEBC方法的系统整体控制框图如图12所示。

图11 不同电容参数下的CEBC仿真波形
Fig.11 The simulation waveforms of CEBC in different capacitance parameter
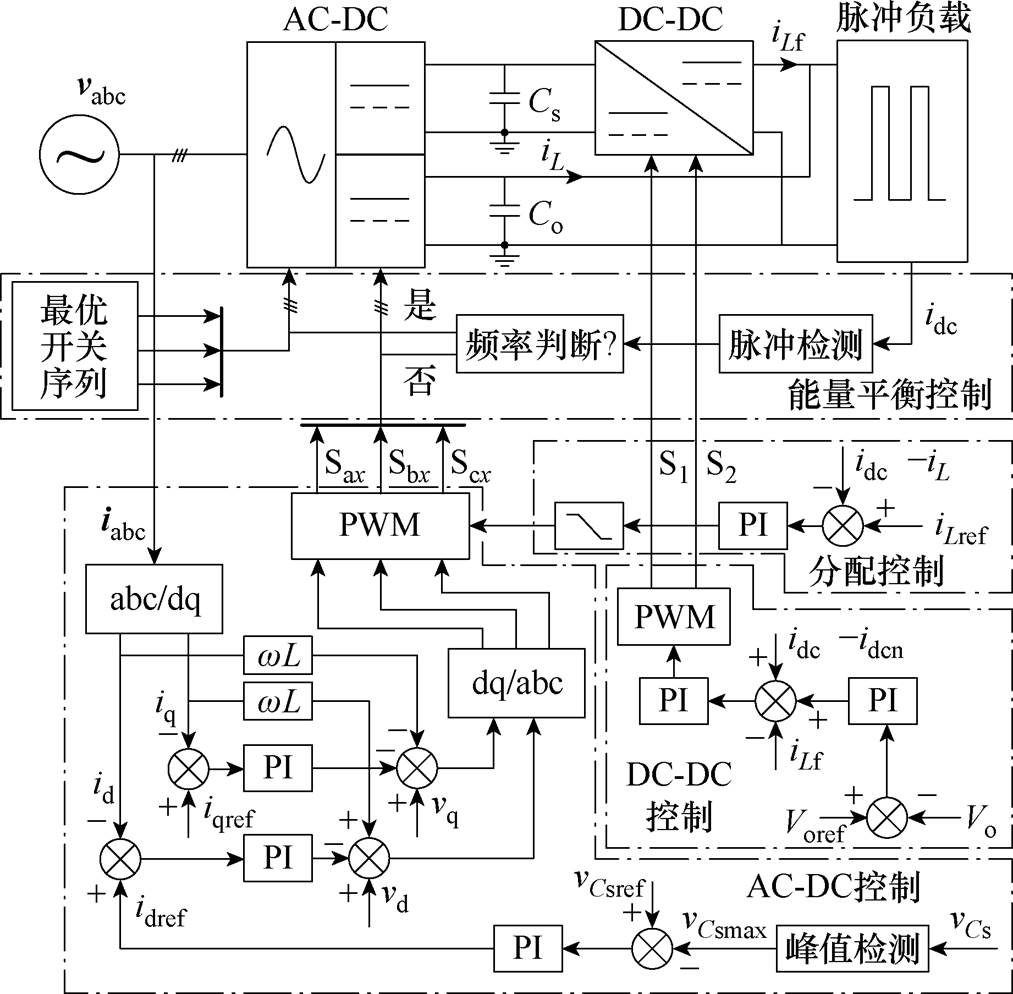
图12 CEBC框图
Fig.12 CEBC block diagram
为了验证本文所提算法的有效性,搭建了三端口整流器实验平台。主控制器选用TI公司28335芯片,功率开关管选用英飞凌公司IRFB4137PbF型MOSFET,工作频率为10 kHz,并通过电子负载跃变产生周期性脉冲电流模拟脉冲负载。实验平台如图13所示,相关参数在表2中列出。
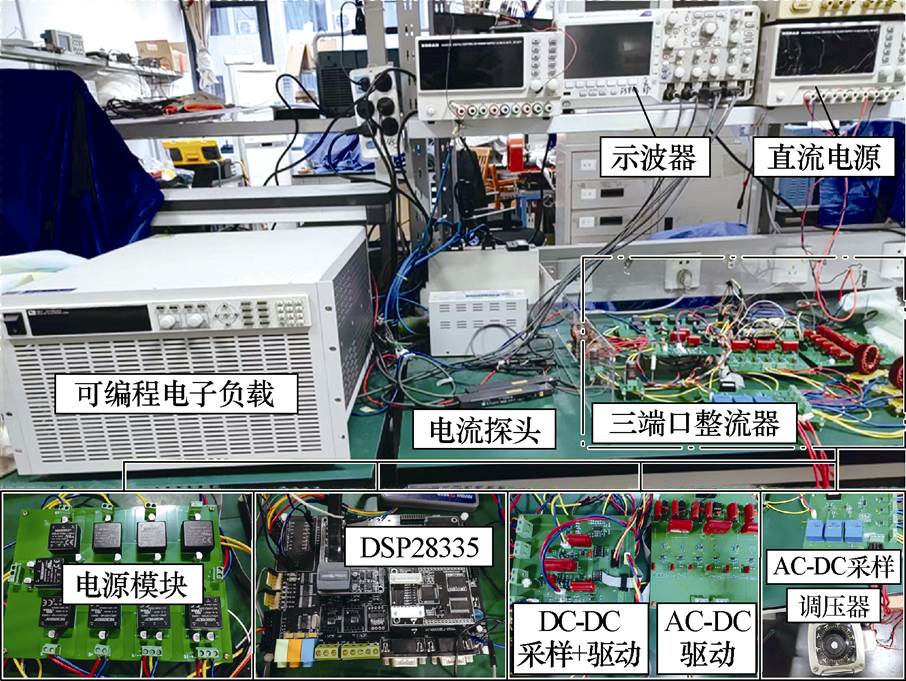
图13 三端口整流器实验平台
Fig.13 Three port rectifier experimental platform
表2 三端口整流器平台参数
Tab.2 Three port rectifier platform parameters
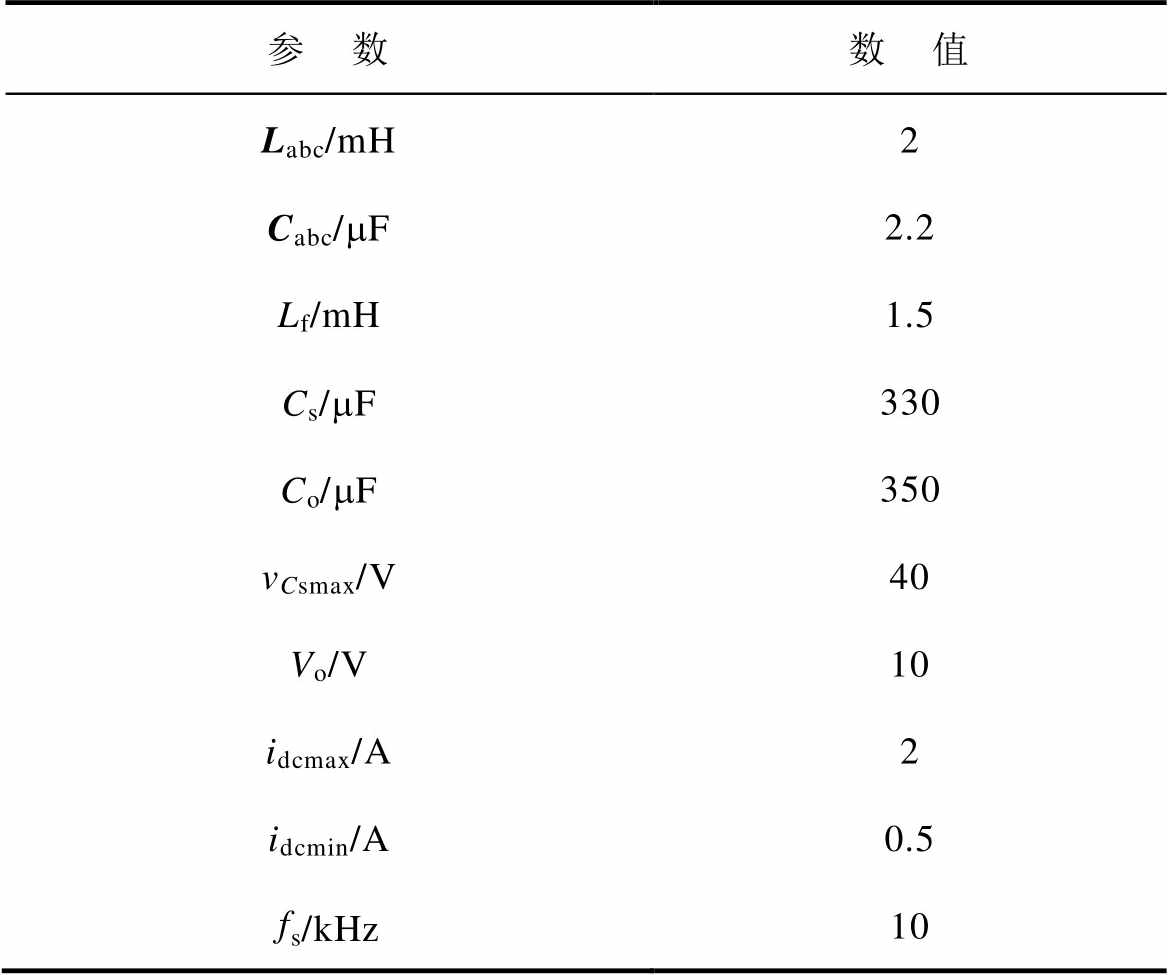
参 数数 值 Labc/mH2 Cabc/mF2.2 Lf/mH1.5 Cs/mF330 Co/mF350 vCsmax/V40 Vo/V10 idcmax/A2 idcmin/A0.5 fs/kHz10
首先给出稳态时恒定脉冲频率实验。图14分别给出了同一组PI参数在脉冲频率为25 Hz和12.5 Hz时三端口整流器稳态实验波形。在不同脉冲频率下,解耦端口电压vCs都可以随着脉冲的启停周期性充放电,电压峰值可以较为精确地控制在40 V左右。25 Hz与12.5 Hz时的解耦电容稳态电压纹波分别约为10 V和12 V,与第1节中通过式(1)、式(2)计算的结果基本一致。
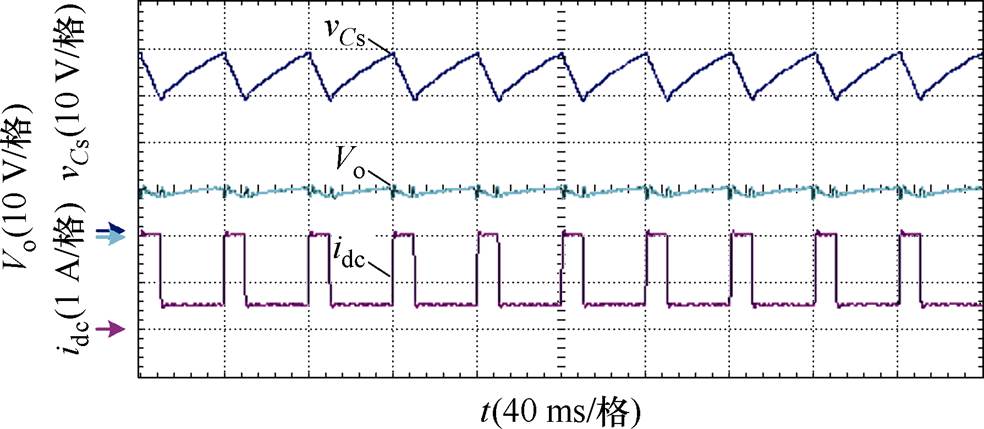
(a)脉冲频率25 Hz
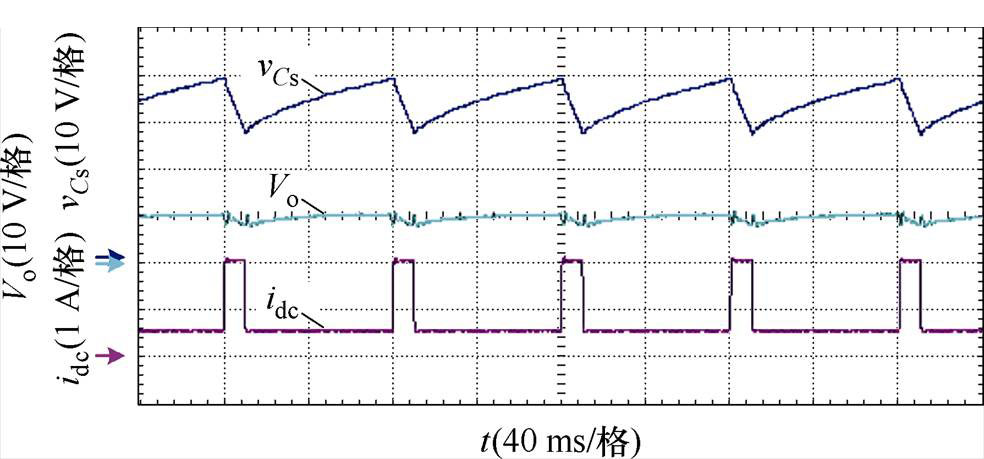
(b)脉冲频率12.5 Hz
图14 传统PI控制稳态波形
Fig.14 Steady state waveforms of traditional PI control
然后在两组不同的PI参数下进行了脉冲负载频率突增实验,实验波形如图15所示。所用的PI参数与第1节中相同,实验结果与仿真相符。图15a和图15b分别为过阻尼和欠阻尼状态,二者需经过1 s以上的调节时间才重回稳态,欠阻尼状态下存在一定量的电压超调。并且不同参数下的电压跌落值均较大,与第1节理论分析结果一致。
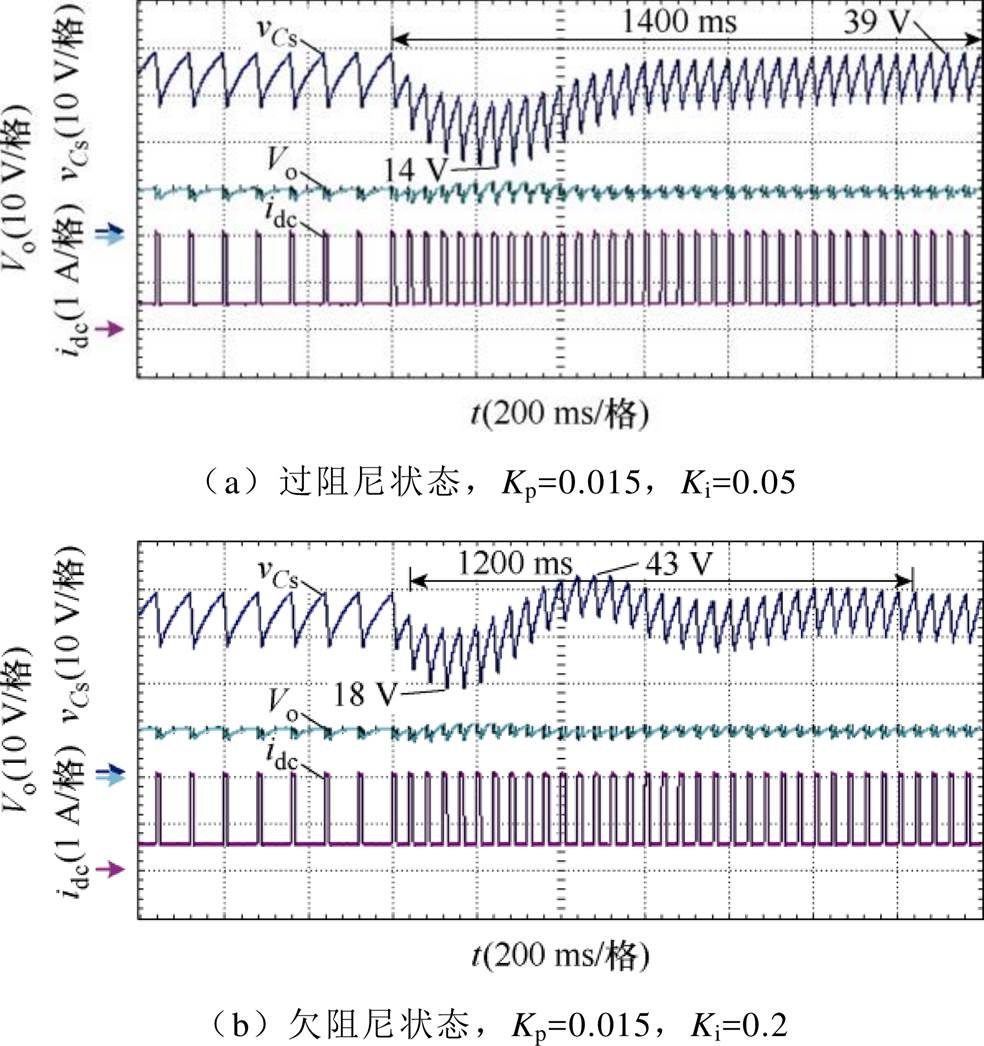
图15 传统PI控制频率突增波形
Fig.15 Traditional PI control frequency surge waveforms diagram
脉冲启动时间不变时,频率的突增使得负载平均功率增加。因此当检测到频率突增后,可以对解耦电压外环的输出量前馈一定的有功电流差值,提高PI调节器的动态性能。图16给出了增加电流前馈后的实验波形。此时系统调节时间缩短,相比仅用PI控制有了较为明显的改善,但vCs电压仍有小幅超调,且存在多次调节过程。调节效果除了与前馈的差值大小相关外,同时也受此时外环PI参数影响。参数发生变化时,前馈效果也会有所改变。
(a)Kp=0.015,Ki=0.05
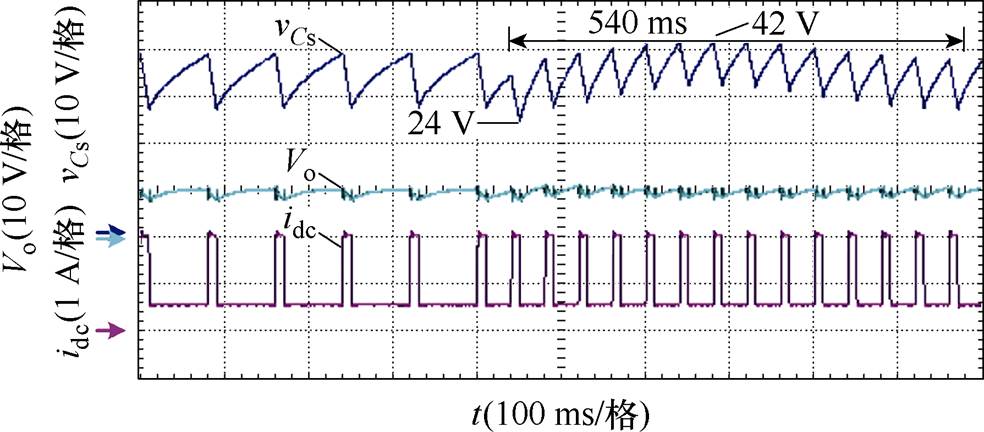
(b)Kp=0.015,Ki=0.2
图16 电流前馈PI控制波形
Fig.16 Waveforms of current feedforward PI control
图17为采用电容能量平衡控制时的频率突增波形。对比之前的实验波形,此时系统在检测到脉冲频率突变后仅经过一个脉冲周期即回到稳态,调节时间最快;动态过程出现的最大电压纹波更为接近稳态情况下10 V的电压纹波,且几乎没有电压超调。不同控制方式下动态过程性能指标柱状图如图18所示。图18中,利用柱状图对比了本文所采用的三种控制方式下系统的性能指标,包括动态过程中出现的最大电压纹波以及系统最终回到稳态所需的调节时间。结果直观表明,电容能量平衡控制下系统的动态调节能力要显著优于前两种控制方式,且调节过程中不受外环PI参数限制,动态性能优化效果显著。
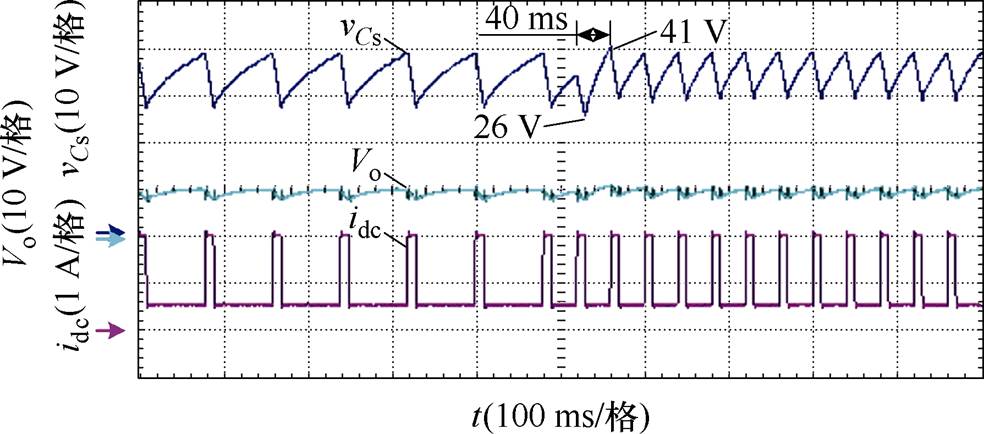
图17 电容能量平衡控制波形
Fig.17 Waveforms of CEBC
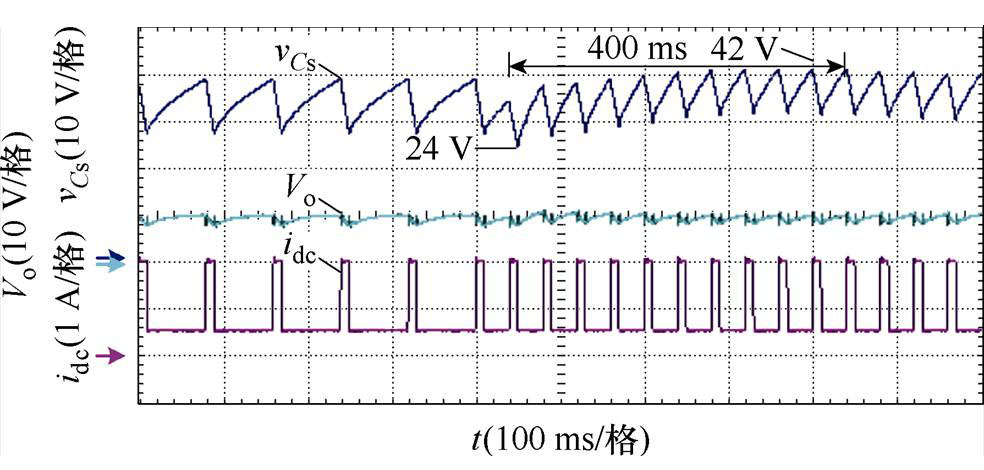
为了验证电容参数对调节性能的影响,其他实验条件不变,将解耦电容Cs减小至254 mF进行了频率突增实验,实验波形如图19所示。
由于Cs减小,稳态运行电压纹波增大,12.5 Hz和25 Hz频率下的vCsmin分别为24.8 V和26.5 V左右。考虑到实际电容容值存在一定的误差范围,该值基本满足式(1)、式(2)的计算结果。使用CEBC方法后,电容电压依旧能够快速达到稳态。在调节过程中,因脉冲频率突增导致的电压跌落相比之前有所增大,这是由于电容减小导致的不可避免的结果,但从整体来看,解耦电容参数改变后系统仍能够保持较好的控制效果,在不同的电容参数下均具备较好的动态调节能力。
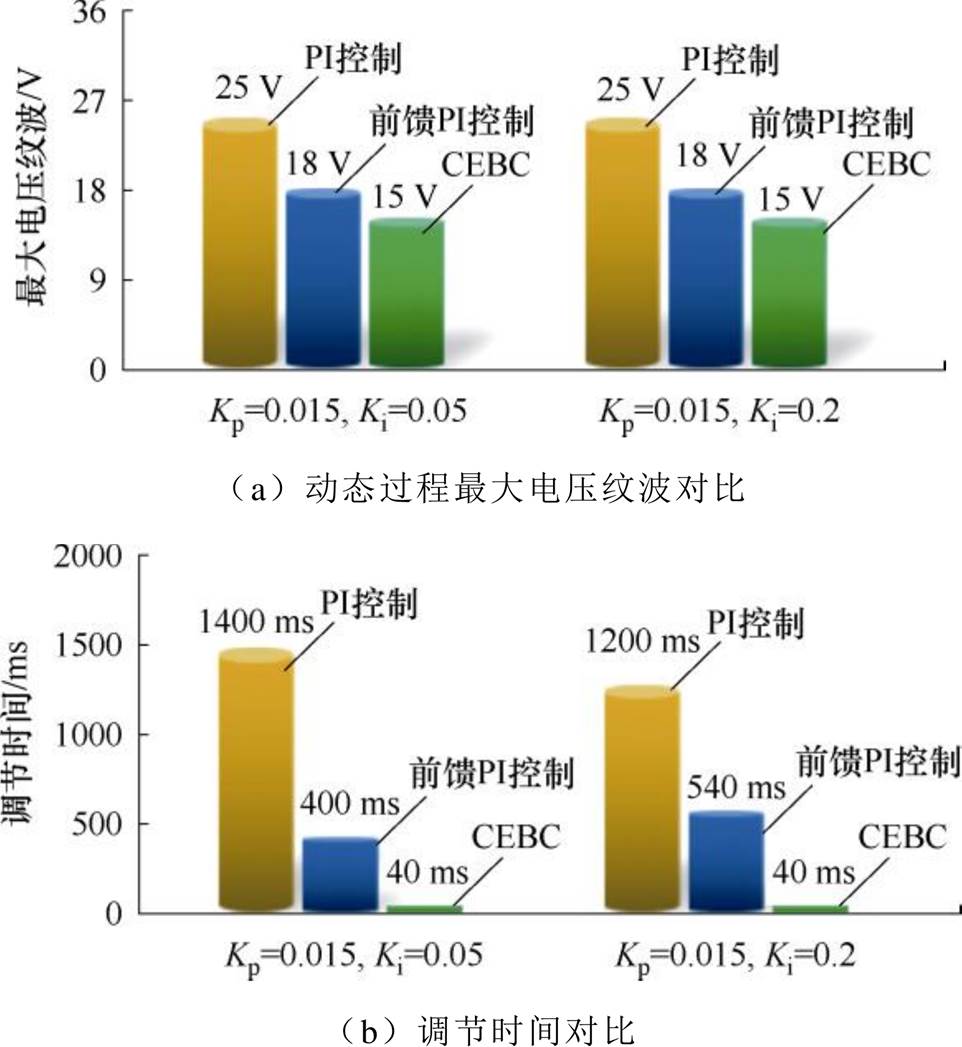
图18 不同控制方式下动态过程性能指标柱状图
Fig.18 Bar charts of dynamic process performance indicators under different control methods
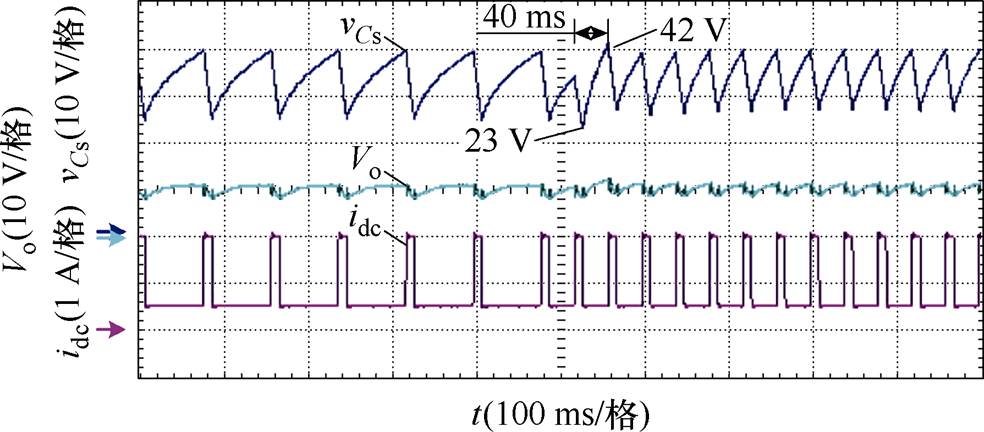
图19 Cs=254 mF时的电容能量平衡控制波形
Fig.19 Waveforms of CEBC when Cs=254 mF
本文在三端口脉冲功率解耦-整流变换器中应用了电容能量平衡控制方案,并在相关实验平台上进行了验证,现得到结论如下:
1)脉冲负载频率突增时,传统双环PI控制由于调节器及系统自身的限制,动态响应能力难以继续提高。采用前馈电流的方式可以优化控制效果,但本质上仍具有PI调节的限制,无法做到最佳。
2)传统电容电荷平衡控制仅考虑了切载时刻的电荷平衡,忽视了因脉冲负载引起的稳态电压波动,因此不能直接应用于三端口整流器。
3)基于电容电荷平衡的控制思想,在动态过程中应用电容能量平衡控制。当检测到脉冲频率突变后,系统经过一个脉冲周期的调节,在下一次脉冲启动前就能使解耦电容实现充放电平衡。相较传统PI控制,CEBC方法调节时间缩短明显,动态过程中最大电压纹波减小约40%,整个控制过程中无明显电压超调,动态调节能力显著提高。并且实验结果表明,CEBC方法调节性能受电容参数影响并不明显,在不同的电容参数下均具备较好的动态调节能力。
参考文献
[1] 张卓然, 许彦武, 姚一鸣, 等. 多电飞机电力系统及其关键技术[J]. 南京航空航天大学学报, 2022, 54(5): 969-984.
Zhang Zhuoran, Xu Yanwu, Yao Yiming, et al. Electric power system and key technologies of more electric aircraft[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2022, 54(5): 969-984.
[2] 马伟明, 鲁军勇. 电磁发射技术的研究现状与挑战[J]. 电工技术学报, 2023, 38(15): 3943-3959.
Ma Weiming, Lu Junyong. Research progress and challenges of electromagnetic launch technology[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 3943-3959.
[3] 李锴, 李建科, 季少卫, 等. 一种现代雷达非线性脉冲特性的模拟装置[J]. 现代雷达, 2016, 38(3): 91-94.
Li Kai, Li Jianke, Ji Shaowei, et al. A simulation device based on modern radar with continuous pulse characteristic[J]. Modern Radar, 2016, 38(3): 91-94.
[4] 刘正春, 王勇, 尹志勇, 等. 有限容量系统脉冲性负荷建模与仿真[J]. 华北电力大学学报(自然科学版), 2014, 41(1): 33-37.
Liu Zhengchun, Wang Yong, Yin Zhiyong, et al. Modeling and simulation of pulsed power load inlimited capacity system[J]. Journal of North China Electric Power University (Natural Science Edition), 2014, 41(1): 33-37.
[5] 刘正春, 朱长青, 赵锦成, 等. 独立电力系统非线性负荷暂态特性仿真[J]. 高电压技术, 2017, 43(1): 329-336.
Liu Zhengchun, Zhu Changqing, Zhao Jincheng, et al. Simulations on transient characteristics of non-linear load in isolated power system[J]. High Voltage Engineering, 2017, 43(1): 329-336.
[6] 孙勇, 林松, 卢胜利, 等. 长脉宽模式下雷达供电系统功率波动机理研究[J]. 电源学报, 2021, 19(3): 134-141.
Sun Yong, Lin Song, Lu Shengli, et al. Study on power fluctuation mechanism of radar power system in long pulse width mode[J]. Journal of Power Supply, 2021, 19(3): 134-141.
[7] 王金全, 胡亚超, 李建科, 等. 脉冲功率负载对柴油发电机组-整流器系统直流侧电压影响的试验研究[J]. 移动电源与车辆, 2015(1): 33-37.
Wang Jinquan, Hu Yachao, Li Jianke, et al. Experiment research on the influence of a pulsed power load to the DC voltage of a diesel generator set-rectifier system[J]. Movable Power Station & Vehicle, 2015(1): 33-37.
[8] Cao Wenping, Mecrow B C, Atkinson G J, et al. Overview of electric motor technologies used for more electric aircraft (MEA)[J]. IEEE Transactions on Industrial Electronics, 2012, 59(9): 3523-3531.
[9] 徐子梁, 任小永, 吴玲燕, 等. 航空Vienna整流器缺相控制方法[J]. 电工技术学报, 2023, 38(20): 5560-5571.
Xu Ziliang, Ren Xiaoyong, Wu Lingyan, et al. A lack phase control strategy for aircraft Vienna rectifier[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5560-5571.
[10] 武鸿, 王跃, 刘熠, 等. 基于广义电容电压不平衡度的MMC子模块开路故障诊断策略[J]. 电工技术学报, 2023, 38(14): 3909-3922.
Wu Hong, Wang Yue, Liu Yi, et al. Open circuit fault diagnosis strategy of MMC sub-module based on generalized capacitor voltage unbalance[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(14): 3909-3922.
[11] 朱建鑫. 三相交直流供电系统低频脉冲功率抑制关键技术研究[D]. 南京: 南京航空航天大学, 2020.
Zhu Jianxin. Research on low frequency pulsed power suppression in three-phase AC-DC power supply systems[D]. Nan Jing: Nanjing University of Aeronautics and Astronautics, 2020.
[12] 吴红飞, 朱建鑫, 陈君雨, 等. 面向高峰均功率比低频脉冲负载三相交流供电系统的电能综合补偿器[J]. 中国电机工程学报, 2020, 40(13): 4310-4319.
Wu Hongfei, Zhu Jianxin, Chen Junyu, et al. A comprehensive compensator for three-phase AC power system with high peak-to-average ratio low frequency pulsed load[J]. Proceedings of the CSEE, 2020, 40(13): 4310-4319.
[13] 李林, 吴红飞, 朱建鑫, 等. 集成低频脉冲功率解耦端口的机载电源系统[J]. 航空学报, 2021, 42(6): 115-124.
Li Lin, Wu Hongfei, Zhu Jianxin, et al. Airborne power supply system integrating low-frequency pulse power decoupling port[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(6): 115-124.
[14] 张佐乾, 吴红飞, 杨帆, 等. 高峰均比脉冲功率独立电源系统关键技术研究综述[J]. 电气工程学报, 2023, 18(1): 43-55.
Zhang Zuoqian, Wu Hongfei, Yang Fan, et al. Overview of key technologies for independent power supply systems with high peak-to-average ratio pulse power loads[J]. Journal of Electrical Engineering, 2023, 18(1): 43-55.
[15] 杨帆, 李林, 朱建鑫, 等. 面向高峰均比低频脉冲功率负载的脉冲电流补偿器及其控制方法[J]. 电工技术学报, 2022, 37(16): 4193-4201.
Yang Fan, Li Lin, Zhu Jianxin, et al. A pulsed current compensator and control strategy for high peak- to-average-ratio low frequency pulsed load[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4193-4201.
[16] Ohnishi T. Three phase PWM converter/inverter by means of instantaneous active and reactive power control[C]//Proceedings IECON '91: 1991 Inter- national Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, 1991: 819-824.
[17] 王久和, 李华德. 一种新的电压型PWM整流器直接功率控制策略[J]. 中国电机工程学报, 2005, 25(16): 47-52.
Wang Jiuhe, Li Huade. A new direct power control strategy of three phase boost type PWM rectifiers[J]. Proceedings of the CSEE, 2005, 25(16): 47-52.
[18] 杨达亮, 卢子广, 杭乃善, 等. 三相电压型PWM整流器准定频直接功率控制[J]. 中国电机工程学报, 2011, 31(27): 66-73.
Yang Daliang, Lu Ziguang, Hang Naishan, et al. Novel quasi direct power control for three-phase voltage-source PWM rectifiers with a fixed switching frequency[J]. Proceedings of the CSEE, 2011, 31(27): 66-73.
[19] Tang Yi, Loh P C, Wang Peng, et al. One-cycle controlled three-phase PWM rectifiers with improved regulation under unbalanced and distorted input voltage conditions[C]//2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, China, 2009: 579-584.
[20] 韦徵, 陈新, 陈杰, 等. 三相PFC整流器改进单周期控制策略[J]. 电工技术学报, 2014, 29(6): 196- 203.
Wei Zheng, Chen Xin, Chen Jie, et al. Research of improved one-cycle control strategy of three-phase PFC rectifier[J]. Transactions of China Electro- technical Society, 2014, 29(6): 196-203.
[21] 郜羚, 王宇, 王子禹. 基于单周期控制的三输入绕组开放式永磁发电机系统动态性能[J]. 电工技术学报, 2016, 31(增刊1): 76-84.
Gao Ling, Wang Yu, Wang Ziyu. Dynamic per- formance of three-input winding open permanent magnet generator system based on one-cycle control[J]. Transactions of China Electrotechnical Society, 2016, 31(S1): 76-84.
[22] Feng Guang, Meyer E, Liu Yanfei. A new digital control algorithm to achieve optimal dynamic per- formance in DC-to-DC converters[J]. IEEE Transa- ctions on Power Electronics, 2007, 22(4): 1489-1498.
[23] 刘晓东, 蒋昌虎, 邱亚杰, 等. Buck变换器动态过程电容充放电平衡控制策略[J]. 电机与控制学报, 2010, 14(6): 77-82.
Liu Xiaodong, Jiang Changhu, Qiu Yajie, et al. A control algorithm based on capacitor charge balance during transient for Buck converter[J]. Electric Machines and Control, 2010, 14(6): 77-82.
[24] 刘晓东, 邱亚杰, 方炜, 等. Boost变换器电容电荷平衡动态最优控制[J]. 电力自动化设备, 2011, 31(5): 63-67.
Liu Xiaodong, Qiu Yajie, Fang Wei, et al. Optimal dynamic control based on capacitor charge balance for Boost converter[J]. Electric Power Automation Equipment, 2011, 31(5): 63-67.
[25] 邱楹, 陈希有, 仲崇权, 等. 全负载DC-DC变换器电荷平衡数字控制[J]. 中国电机工程学报, 2013, 33(18): 40-47, 17.
Qiu Ying, Chen Xiyou, Zhong Chongquan, et al. Charge balance digital control for DC-DC converters with full load range[J]. Proceedings of the CSEE, 2013, 33(18): 40-47, 17.
[26] Wang Yu, Xu Xin, Fu Hongwei, et al. Charge balance control for DC/DC converter systems: from single- input systems to multiple-input systems[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(1): 206-222.
[27] 王宇, 肖文妍, 郝雯娟, 等. 永磁磁通切换电机的转矩冲量平衡控制技术[J]. 中国电机工程学报, 2017, 37(22): 6577-6584, 6769.
Wang Yu, Xiao Wenyan, Hao Wenjuan, et al. Research on torque impulse balance control strategy of flux-switching permanent magnet machine[J]. Proceedings of the CSEE, 2017, 37(22): 6577-6584, 6769.
[28] 肖文妍, 王宇, 耿亮, 等. 单相开路情况下6/19永磁磁通切换容错电机转矩冲量平衡控制策略[J]. 电工技术学报, 2018, 33(7): 1488-1496.
Xiao Wenyan, Wang Yu, Geng Liang, et al. Torque impulse balance control strategy of 6/19 FTFSPM machine under open-circuit condition[J]. Transactions of China Electrotechnical Society, 2018, 33(7): 1488- 1496.
[29] 顾惠, 王宇. 开路及短路组合故障下容错型永磁磁通切换电机转矩冲量平衡控制策略的研究[J]. 电工技术学报, 2020, 35(9): 1931-1944.
Gu Hui, Wang Yu. Research on torque impulse balance control strategy of fault tolerant flux switching permanent magnetic motor under combined open and short circuit faults[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1931-1944.
[30] 王菁, 颜建虎, 季国东, 等. 一种基于双位置观测器的永磁同步电机低速无位置传感器控制方法[J]. 电工技术学报, 2023, 38(2): 375-386.
Wang Jing, Yan Jianhu, Ji Guodong, et al. A sensorless control method for permanent magnet synchronous machine based on dual position observers at low speed[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 375-386.
Abstract Different from conventional loads, pulse loads have the characteristics of low average power, high peak power, and variable pulse frequency, which bring challenges to the stable operation of power supply systems. The three-port rectifier with dual DC output ports utilizes periodic charging and discharging of the decoupling capacitor to achieve power decoupling. However, the traditional PI control used in the rectifier struggles to respond promptly to changes in pulse frequency, and the dynamic adjustment ability of the system is limited. As a typical nonlinear control method, the capacitive charge balance control can enhance dynamic regulation performance and has been successfully implemented in various fields. However, the related calculation methods are not suitable for low-frequency pulse loads.
This study improves the traditional concept of capacitor charge balance control based on the power characteristics of pulse loads, considering peak voltage control of decoupling capacitor voltage. It re-derives the calculation formula to achieve capacitor charge balance and obtains the switching moment of the dynamic process rectifier's switching tube. In the steady-state operation, the system adopts PI control to achieve control accuracy. When the pulse frequency changes, the system switches to the capacitor energy balance control method. According to the calculated switching moment, the active current of the AC source is controlled to meet the energy balance after one rise and one fall. After the dynamic process is completed, the system switches back to PI control. The study also analyzes the influence of different decoupling capacitor parameters on the dynamic control process of the proposed method. Since the switching moment involves the capacitor product and voltage ripple, the calculated results are generally small. Simulation results demonstrate that changing capacitor parameters has a limited impact on the control performance of the proposed solution.
An experimental platform was built to conduct sudden increases in pulse load frequency. The proposed control method was compared with traditional PI and current feedforward PI controls. When a sudden increase in pulse frequency was detected, the capacitor energy balance control required only one pulse cycle of adjustment time to reach a steady state, which was significantly shorter than the other two methods and effectively suppressed voltage ripple. Although reducing the decoupling capacitor value increases the voltage drop at the moment of switching load, the system maintains good dynamic control performance.
The following conclusions are drawn. (1) Traditional dual-loop PI control is limited in dynamic response capability when sudden increases in pulse load frequency due to the limitations of the regulator and low- frequency pulse load. Although using feedforward current can optimize control effects, it cannot achieve the best performance. (2) Traditional capacitor charge balance control, which does not consider the existence of pulse loads, cannot be directly applied to three-port rectifiers. (3) The application of capacitor energy balance control can effectively enhance the system's dynamic regulation performance, and capacitor parameters have neglectable effects on the proposed method, exhibiting good adjustment capability under different capacitor parameters.
keywords:Pulse load, power decoupling, frequency mutation, energy balance control, dynamic response
DOI: 10.19595/j.cnki.1000-6753.tces.240178
中图分类号:TM461
国家自然科学基金(51977107, U2141227)和航空科学基金(2020HKZ0001)资助项目。
收稿日期 2024-01-26
改稿日期 2024-03-30
栾信宇 男,2000年生,硕士研究生,研究方向为三端口变换器及其控制。E-mail: 812370625@qq.com
王 宇 男,1982年生,副教授,硕士生导师,研究方向为交流电机本体及其控制。E-mail: wanghaohao@nuaa.edu.cn(通信作者)
(编辑 陈 诚)