图1 AFMHSRM拓扑结构示意
Fig.1 Schematic diagram of AFMHSRM topology
摘要 为了提高开关磁阻电机的输出转矩以及绕组故障冗余能力,提出了一种新型轴向磁通模块化混合励磁开关磁阻电机。该电机的左右双定子和中间转子均采用模块化结构,左右双定子各由6个U型定子模块环形排列构成,各个定子模块上分别缠绕独立的集中式绕组,且在相邻定子模块极端处嵌入永磁体构成了混合励磁磁路,能够在提升电机转矩输出能力的同时保证绕组故障冗余能力。首先,介绍了所提电机的拓扑结构和工作原理,通过磁等效电路法分析了电机转矩和磁链的耦合关系。然后,利用有限元方法分析比较了电机在无故障和故障状态下的电磁性能,建立了电机故障条件下绕组的数学模型,仿真预测了不同故障下电机特性和容错性能。最后,加工制造了一台样机并搭建了实验平台,给出了绕组正常励磁和故障下的实验结果,验证了所提电机结构的有效性和故障性能分析的准确性。
关键词:轴向磁通开关磁阻电机 模块化定子 混合励磁 绕组故障 电磁性能
开关磁阻电机(Switched Reluctance Motor, SRM)具有结构简单、恶劣环境适应性强等优点[1-3]。与永磁同步电机[4]及其他电机相比,开关磁阻电机具有高容错性能和较低的制造成本[5-7]。然而,SRM的输出转矩相对较低。近年来,众多学者设计了新的电机拓扑结构来提升SRM的性能。与径向和横向SRM相比,轴向磁通开关磁阻电机(Axial Flux Switched Reluctance Motor, AFSRM)特殊的轴向磁通路径可以提高转矩输出能力[8]。然而,与感应电机和永磁体电机等其他类型电机相比,AFSRM的性能仍然有差距。
国内外众多学者针对提高AFSRM的输出转矩进行了诸多研究。定转子模块化被认为是提高转矩的途径之一[9-11]。文献[9-10]中的AFSRM都采用了相似的C型模块化定子以提高电机效率。文献[11]中设计了模块化定子与文献[9-10]中安装方向不同的AFSRM。仿真和实验结果表明,电机的铜损和铁损耗明显降低,转矩输出能力较强。文献[12]将体积相同、转子形状不同的AFSRM进行比较,结果表明带有分段转子AFSRM的平均转矩和效率更高。
对于径向和横向SRM,在定转子中嵌入永磁体提高转矩的方法已经被广泛研究[13-15]。然而,在轴向SRM上采用混合励磁方法的研究较少,文献[16]通过在轴向SRM的定子轭部嵌入永磁体,证明了混合励磁对轴向SRM转矩性能的提升作用。由于混合励磁磁路复杂度较高,模块化通常与混合励磁方法同时应用,以在提高电机的转矩性能的同时减少磁路耦合。文献[17]提出了一种C型模块化定子结构的径向混合励磁SRM。结果表明,与传统径向SRM相比,所提电机有着高转矩输出能力、高容错性能及低转矩脉动。文献[18]提出了一种双定子模块化混合励磁径向SRM以提高电机性能,但是径向模块化双定子结构增加了安装难度。磁等效电路(Equivalent Magnetic Circuit, MEC)通常被用来对复杂混合磁路进行分析,文献[19-21]通过MEC分析了混合励磁SRM的转矩具有永磁分量,验证了永磁体对SRM转矩增强有促进作用。
采用模块化结构具有另一个重要的优势就是高容错性能和高可靠性。电机每个定子模块都缠绕独立的集中式绕组,因此在部分绕组发生故障时,其他绕组依旧能正常励磁,提高了电机的转矩性能和故障冗余能力[22-24]。另外,文献[25-26]中采用增加相数的方法也可以提高电机的容错能力,但是模块化定子SRM使用的功率变换器具有更少的桥臂和更灵活的绕组连接方式。文献[27]介绍了一种三相24/20径向磁通混合励磁模块化SRM,该电机采用混合励磁且每相有八个绕组,具有很大的转矩输出能力和故障冗余能力,但是并没有对故障状态下的电机性能进行分析。一般来说,SRM绕组不同故障时磁路耦合状态不同导致了转矩和磁链难以解耦是电机绕组故障时难以建模和仿真的主要原因。在文献[28]中,推导出了双三相SRM某相两绕组开路故障下的耦合关系,利用有限元得到绕组间互感关系后,建立了绕组故障下的仿真模型,并预测了不同故障状态下的电磁特性。综上所述,对于AFSRM,定转子模块化能够降低绕组之间的耦合关系,以实现绕组故障状态下的转矩和磁链解耦。同时,采用永磁体进行混合励磁能够提高故障时的电机性能。
为了提高AFSRM的输出转矩和容错冗余能力,同时降低转矩脉动,本文在文献[17-18]所提径向结构的启发下,结合模块化和混合励磁的优点,提出了一种新型轴向磁通双定子模块化混合励磁SRM(Axial Flux Modular-double-stator Hybrid- excitation SRM, AFMHSRM)。通过MEC分析了绕组故障时的转矩增强特性以及转矩磁链解耦特性,并采用有限元方法将其与传统轴向磁通模块化双定子开关磁阻电机(Conventional Axial Flux Modular- double-stator SRM, CAFMSRM)进行比较分析,验证了MEC分析结果并建立了不同状态下的电机绕组仿真模型。最后制作了一台AFMHSRM样机以验证电机性能分析和仿真的准确性。
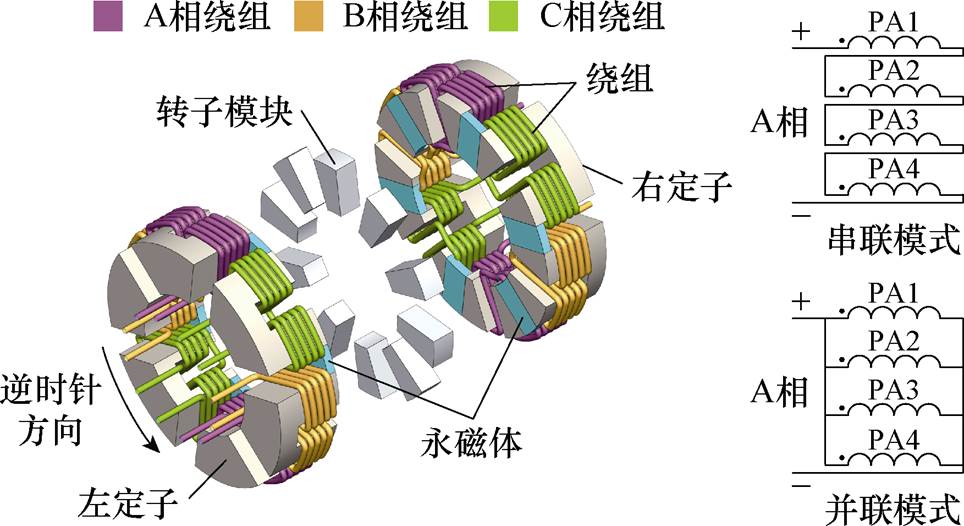
图1给出了所提的12/10/12极AFMHSRM的3D拓扑结构及绕组连接方式。可以看出,转子两侧的左定子和右定子各由六个U型定子模块环形排列组成,每个U型定子模块包括两个定子极和一个定子槽。转子由10个扇形模块环形排列组成,定转子之间留有均匀且轴向长度相等的气隙。为了保证定子极上绕组在不同半径处槽满率不变,相邻U型定子模块之间的槽和U型定子模块的槽采用平行槽结构,且槽宽相等。U型定子模块的两个定子极上缠绕串联连接的集中式绕组。永磁体嵌入在相邻U型定子模块之间的槽中且紧贴定子极端部平面。模块化定子和转子有助于减少电机的铁心质量,对转矩密度的提升也有一定的作用。图1中,A、B和C相各有四个独立绕组,且有串联和并联两种连接方式,A、B和C相的四个绕组分别为PAk、PBk和PCk,其中k=1, 2, 3, 4。
图1 AFMHSRM拓扑结构示意
Fig.1 Schematic diagram of AFMHSRM topology
AFMHSRM的二维线性展开如图2所示,PAk、PBk和PCk所在的U型定子模块分别为MAk、MBk和MCk。“×”表示电流的方向垂直于纸面向里,以A相为例,四个绕组PAk独立绕制在四个定子模块MAk上并且各引出两个接线端,同一相绕组连接方式的多样化提高了电机的可靠性和故障冗余能力。为了形成增强转矩的混合磁路,电机同侧定子中的永磁体充磁方向沿着圆周方向保持一致,左定子永磁体充磁方向为逆时针,而右定子永磁体的充磁方向与左定子相反。
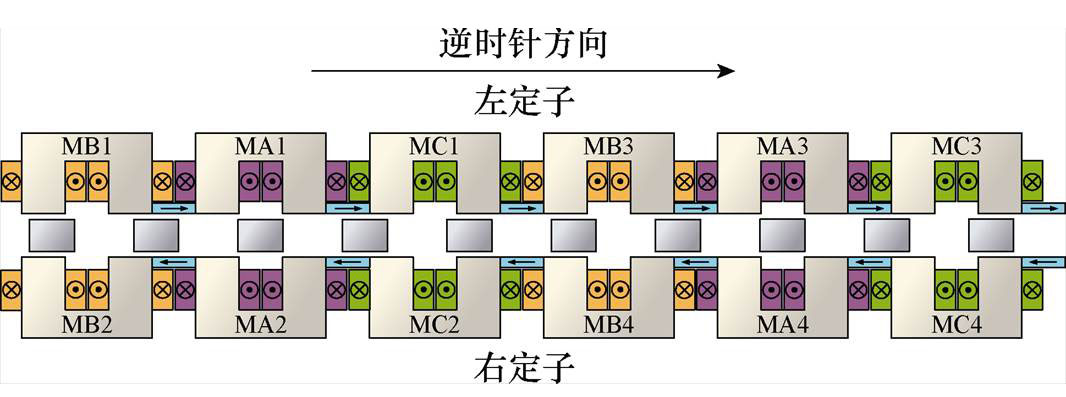
图2 AFMHSRM二维线性展开
Fig.2 Two-dimensional linear expansion diagram of AFMHSRM
图3展示了仅A相绕组励磁时,AFMHSRM转子位于对齐位置时的磁路。如图3a所示,当A相绕组励磁电流为0(I=0)时,由于气隙磁阻较大,铁心磁阻很小,永磁体产生的绝大部分磁通从同侧多个U型定子模块中穿过,形成闭合回路。图3b中,当A相绕组励磁电流大于0(I>0)时,由于铁心磁阻增大的影响分为两路:一部分通过U型定子模块反向抵消一部分励磁磁通;另外一部分则穿过气隙和转子,与另一侧永磁体形成闭合回路。气隙处永磁体磁通与励磁磁通的叠加增大了气隙处的磁通密度,从而提高了转矩。值得一说的是,当励磁电流较小时,永磁体磁通会反向通过定子铁心并抵消所有的励磁磁通,在绕组中形成负磁链。随着励磁电流的增大,定子铁心的饱和效应使得铁心磁阻增大,从而迫使更多的永磁体磁通穿过气隙和转子,由永磁体磁通产生的转矩占比越来越大。
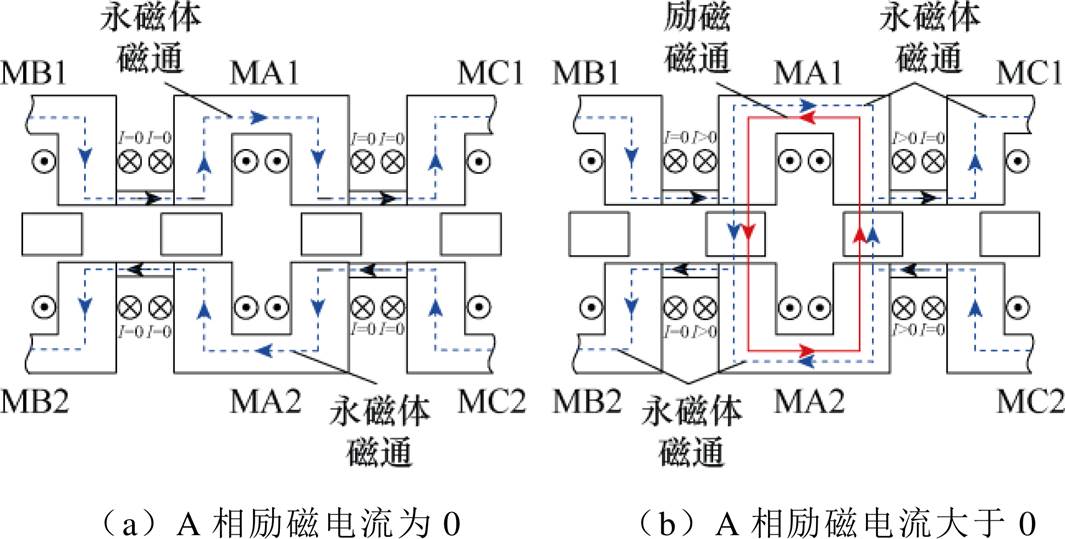
图3 AFMHSRM单相励磁磁路
Fig.3 AFMHSRM single-phase excitation flux path schematic diagram
新型AFMHSRM结构的特点总结如下:①定转子都使用模块化结构,整体上减小了电机的铁心质量,有利于增大转矩和功率密度;②定子极端部安装永磁体增大了气隙磁通密度,提高了电机的输出转矩;③模块化结构形成的短磁路有利于减少磁耦合,进而有利于转矩和磁链解耦;④同一相绕组连接方式多样,提高了绕组发生故障后的容错能力和可靠性,绕组故障冗余能力增大。
为了探究绕组不同状态下的永磁体对电机性能的影响以及电机转矩和磁链耦合关系,采用MEC方法对AFMHSRM进行分析。以A相励磁为例,若忽略漏磁的影响,AFMHSRM只有四个定子模块MA1-MA2和MA3-MA4以及其所对应的四个转子模块作用而产生转矩。
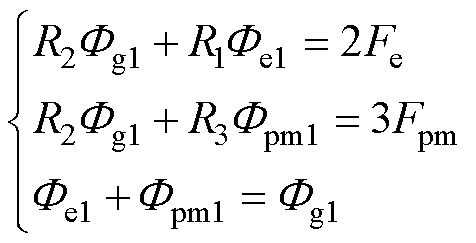
图4为A相正常励磁时AFMHSRM转子处于对齐位置时的MEC。图4a中,Rsy和Rsp分别为定子轭和定子极的磁阻;Rg和Rrp分别为气隙和转子模块磁阻;Rpm为永磁体模块的磁阻;其中R2=Rrp+ 2Rg。Fe和Fpm分别为单个定子极所缠绕的绕组和单个永磁体产生的磁动势。简化后的等效磁路如图4b所示,图中R1=Rsy+2Rsp,R3=2R1N+3Rpm,其中R1N为非励磁相定子模块的磁阻;Fek为穿过MAk的磁通;Fpm1和Fpm2分别为穿过励磁相定子模块两侧永磁体磁通;Fg1、Fg2分别为穿过两组定子模块MA1- MA2、MA3-MA4对应气隙和转子的磁通。在正常励磁情况下,由于磁路的对称性,磁通有如下的恒等关系:Fg1=Fg2、Fpm1=Fpm2和Fe1=Fe2=Fe3=Fe4。
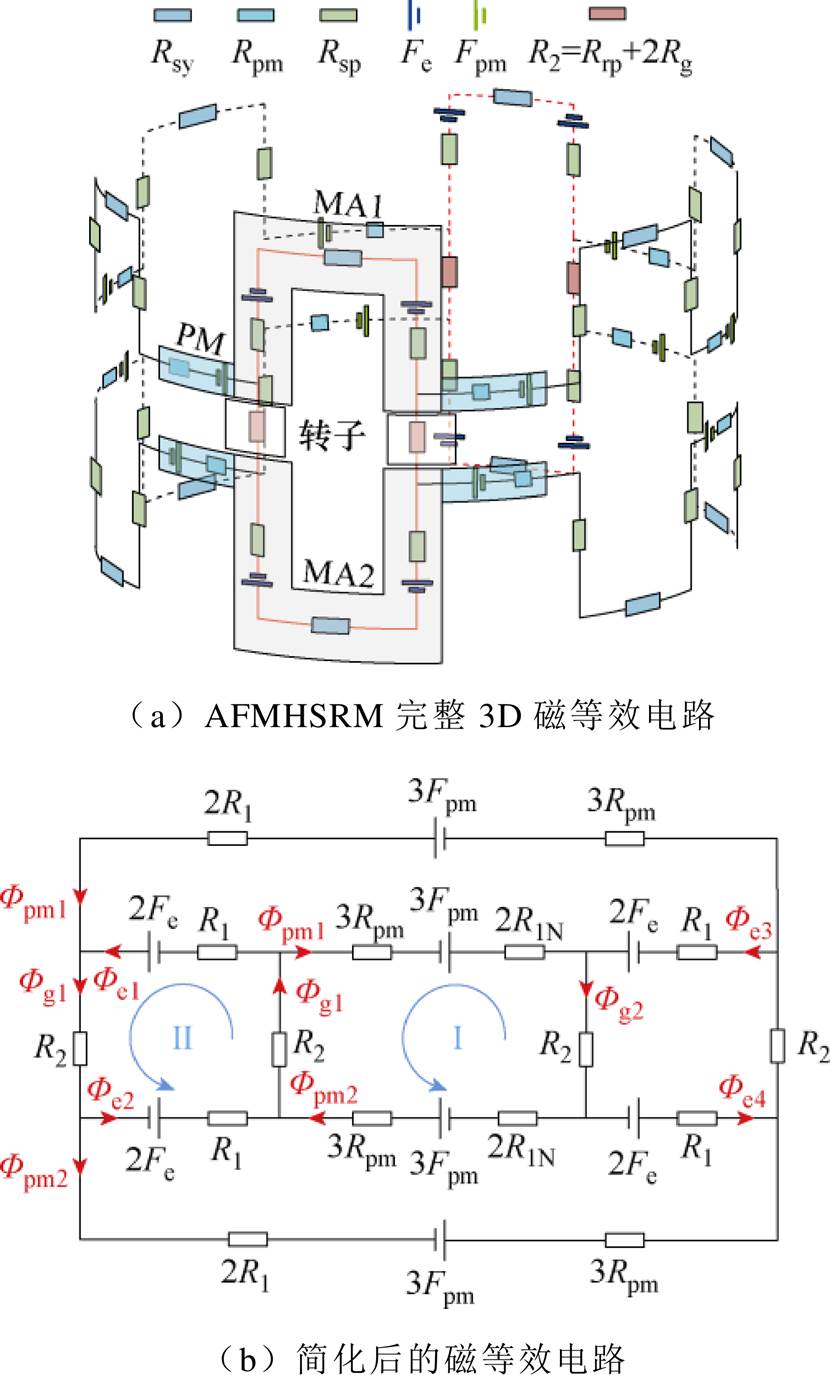
图4 A相励磁时AFMHSRM磁等效电路
Fig.4 MEC of AFMHSRM for A-phase excitation
忽略定转子铁心的饱和,根据图4b,回路方 程[17]可写为
 (1)
(1)
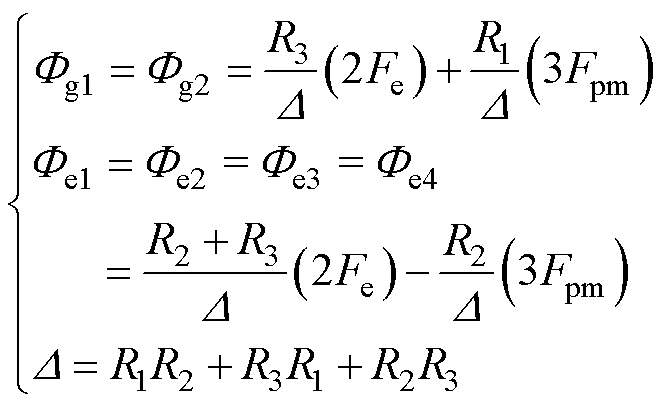
求解式(1)得到各个磁通为
 (2)
(2)
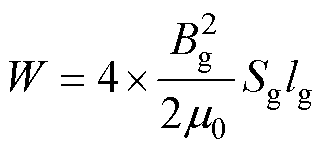
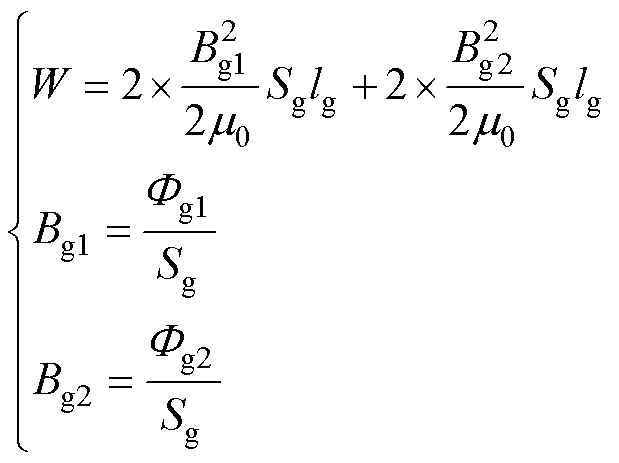
式(2)表明,穿过气隙的磁通Fg1和Fg2由永磁体磁通R1(3Fpm)/D 和励磁磁通R3(2Fe)/D 相互叠加而成。而Fe1中的-R2(3Fpm)/D 项表明永磁体磁通产生的磁通会抵消一部分定子模块铁心中产生的励磁磁通。电机的电磁转矩与励磁绕组激发的场能W有很大关系,其关系[18]满足
 (3)
(3)
式中,Sg、lg分别为气隙面积和气隙长度; 为气隙的磁导率;Bg为气隙磁通密度,Bg与穿过转子和气隙磁通Fg的关系为:Bg=Fg/Sg。在不同的转子位置
为气隙的磁导率;Bg为气隙磁通密度,Bg与穿过转子和气隙磁通Fg的关系为:Bg=Fg/Sg。在不同的转子位置 时,电磁转矩T为场能对转子位置角的导数,有
时,电磁转矩T为场能对转子位置角的导数,有
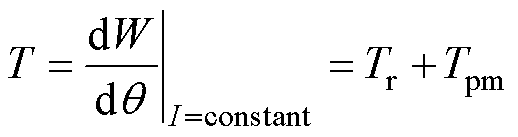 (4)
(4)
式中,I为绕组中励磁电流;Tr为励磁磁通产生的励磁转矩,即磁阻转矩;Tpm为由永磁体磁通作用而产生的永磁转矩。
2.1节对AFMHSRM在A相正常励磁时的转矩特性进行了分析。而在电机励磁相绕组发生故障(断路或完全短路)情况下,磁等效电路不是对称的,此时对于AFMHSRM,式(3)可以改写为
 (5)
(5)
下面对AFMHSRM绕组故障进行定义:若绕组串联连接时,绕组故障表示绕组完全短路;若绕组并联连接时,绕组故障表示绕组开路。若某相的四个绕组中有不超过三个绕组发生故障,该相励磁仍然能够产生转矩,具有故障冗余能力。以A相励磁为例,A相的四个绕组所有可能故障状态见表1。对于AFMHSRM,绕组PA1和PA4故障会导致转子盘径向对称两边受到很大的且方向相反的轴向力,转子盘面极易发生不可恢复形变,这种故障情况应尽量避免,不做考虑。
表1 AFMHSRM的A相绕组可能故障状态
Tab.1 Possible fault states of the A-phase winding of AFMHSRM

状态编号条 件 S(0)绕组无故障 S(1)绕组PA4故障 S(2-1)绕组PA3、PA4故障 S(2-2)绕组PA2、PA4故障 S(3)绕组PA2、PA3和PA4故障
由于故障绕组所对应的磁动势为0,因此类比式(1)~式(3)可以得出不考虑饱和情况下的气隙磁通和铁心磁通见表2。表2中,变量上标为绕组各个状态的编号。
对于开关磁阻电机来说,电机通常工作在饱和或半饱和状态。绕组故障状态下的定子模块铁心磁阻与通过所在铁心的磁通量有关。由于永磁体磁阻很大,则相邻定子模块之间磁耦合程度较低,因此图4b中的磁路可以画成图5中两个独立磁路的形式,其中Fek为PAk产生的磁动势。定子模块MA1-MA2或MA3-MA4中磁通不平衡使得铁心磁阻差别很大,因此励磁相定子模块MAk铁心磁阻为R1k,其中R1k随着 增大而增大;R21和R22分别为两组定子模块MA1-MA2和MA3-MA4所对应气隙和转子磁阻之和。由于磁路相互独立,PA1-PA2和PA3-PA4对应绕组处于相同状态时,产生的气隙磁通和铁心磁通是相同的。以PA1-PA2为例,PA1-PA2有三种可能状态:PA1和PA2正常运行、仅PA2故障以及PA1和PA2全部故障,状态编号分别为S(4)、S(5)和S(6)。同样PA3-PA4也有相同的三种状态。状态S(4)、S(5)和S(6)下的MA1-MA2气隙和铁心磁通
增大而增大;R21和R22分别为两组定子模块MA1-MA2和MA3-MA4所对应气隙和转子磁阻之和。由于磁路相互独立,PA1-PA2和PA3-PA4对应绕组处于相同状态时,产生的气隙磁通和铁心磁通是相同的。以PA1-PA2为例,PA1-PA2有三种可能状态:PA1和PA2正常运行、仅PA2故障以及PA1和PA2全部故障,状态编号分别为S(4)、S(5)和S(6)。同样PA3-PA4也有相同的三种状态。状态S(4)、S(5)和S(6)下的MA1-MA2气隙和铁心磁通 、
、 和
和 为
为
表2 考虑饱和与不考虑饱和时不同状态下AFMHSRM的气隙和铁心磁通
Tab.2 Air gap and core flux of AFMHSRM for different states considering saturation and without saturation
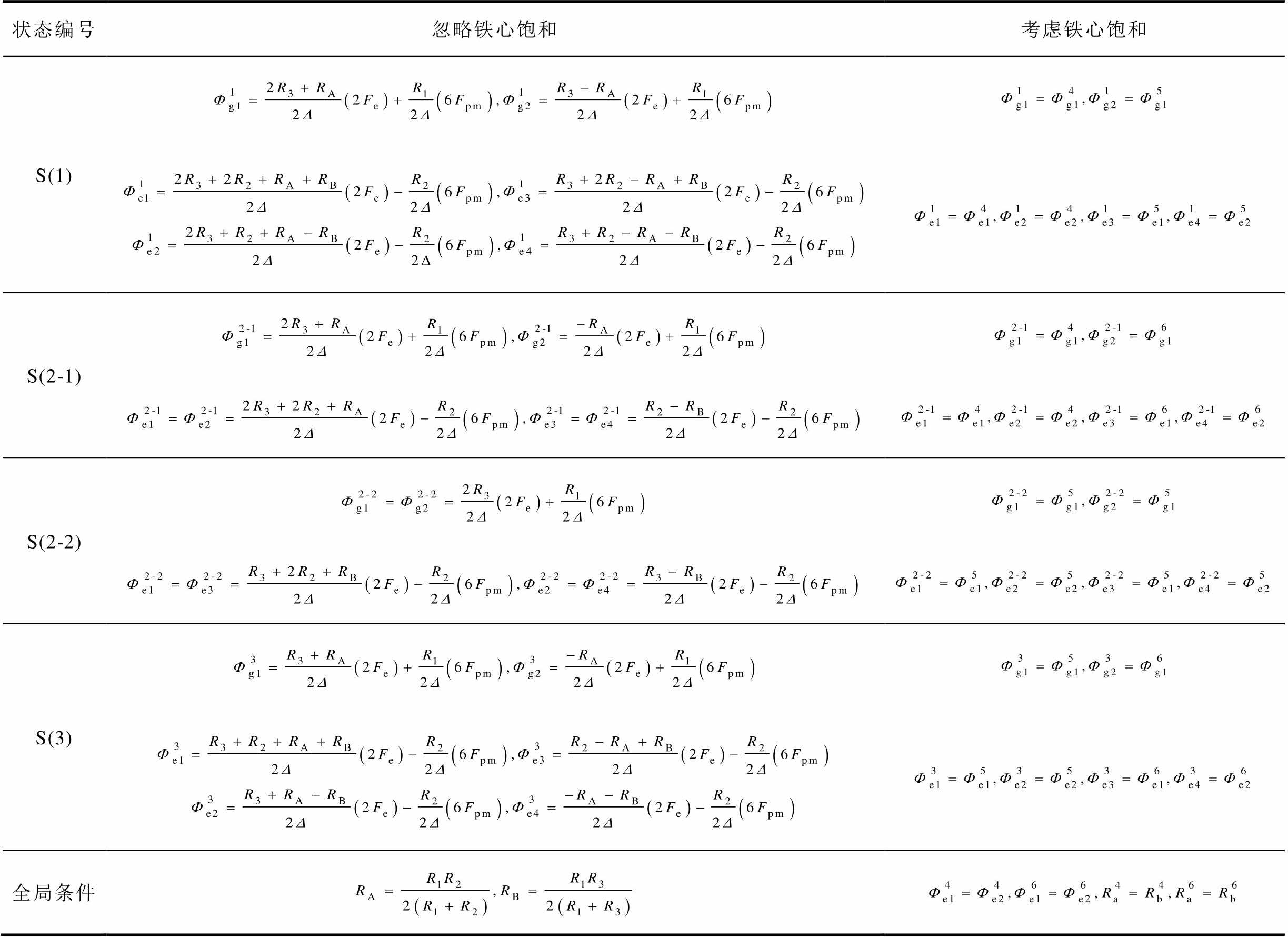
状态编号忽略铁心饱和考虑铁心饱和 S(1) S(2-1) S(2-2) S(3) 全局条件
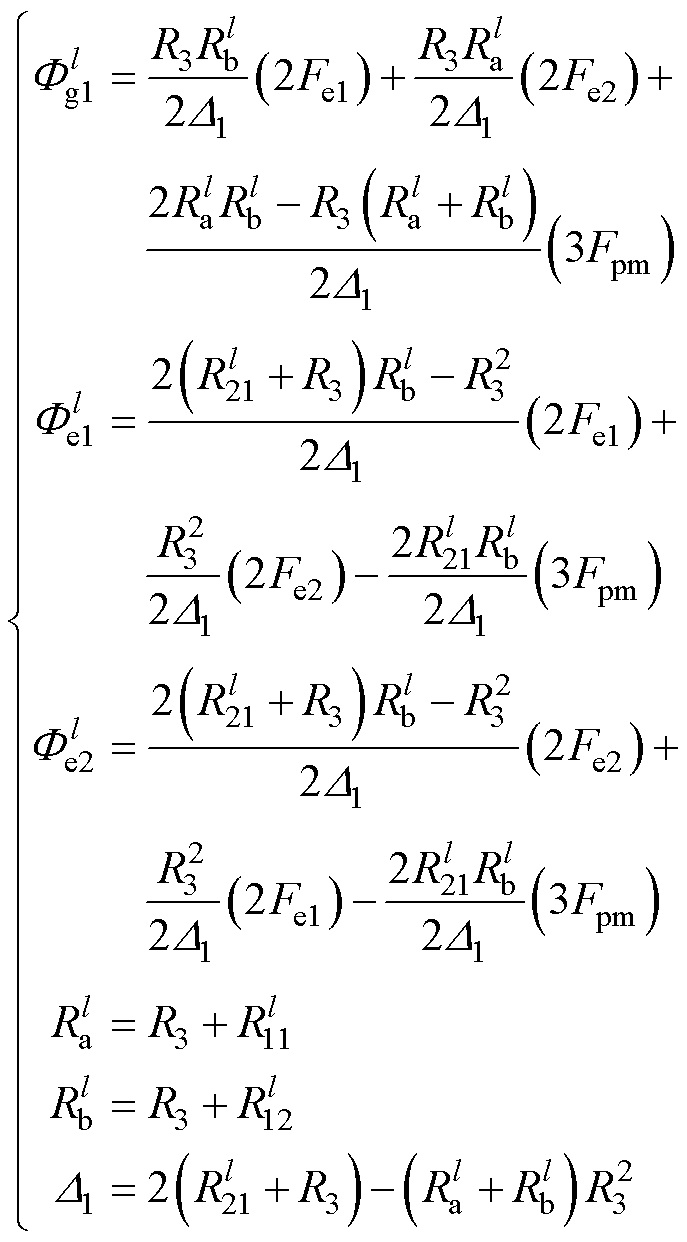 (6)
(6)
式中,上标“l”表示变量在三个状态S(4)、S(5)和S(6)下的值,l可以为4、5和6。此外,故障绕组对应的磁动势Fek=0。根据图5可以看出,在绕组处于相同状态下,PA3-PA4的 、
、 和
和 分别与PA1-PA2的
分别与PA1-PA2的 、
、 和
和 相等。则考虑定子铁心饱和时,表1中四种状态下的气隙和铁心磁通见表2。
相等。则考虑定子铁心饱和时,表1中四种状态下的气隙和铁心磁通见表2。
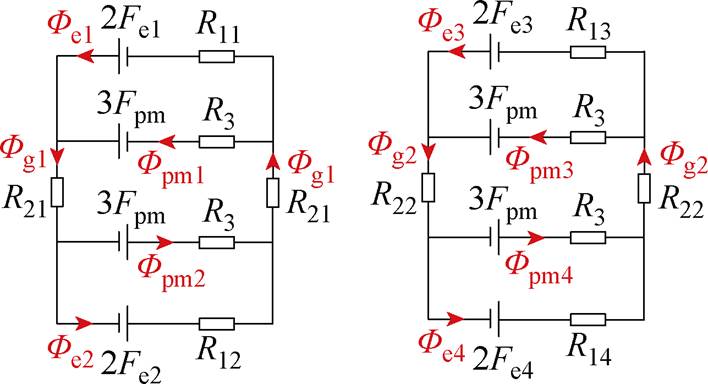
图5 考虑饱和的A相励磁AFMHSRM磁等效电路
Fig.5 MEC of AFMHSRM at A-phase excitation considering saturation
通过对表2的分析可以看出,无论考虑还是不考虑励磁相定子铁心饱和,不同状态下穿过气隙和定子铁心磁通关系为
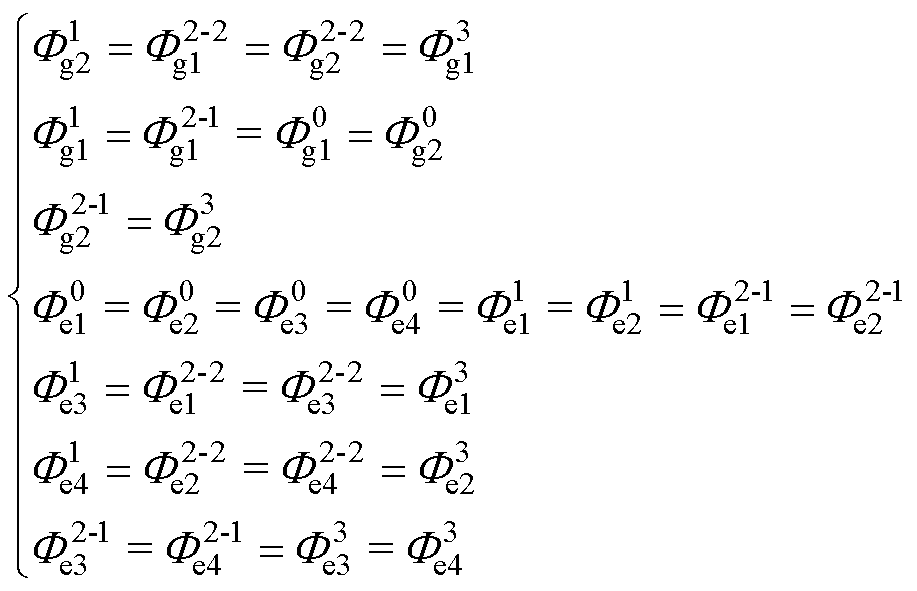 (7)
(7)
根据式(7)所示的磁通相等关系,得到相同励磁电流下不同状态气隙磁通密度之间关系为
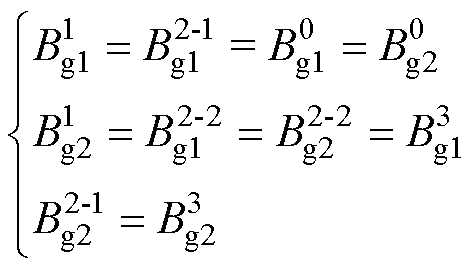 (8)
(8)
由于铁心磁通与磁链大小成正比,且故障绕组磁链为0,根据式(3)~式(7)可以得到一相绕组不同故障下的总场能、总转矩以及总磁链的关系为
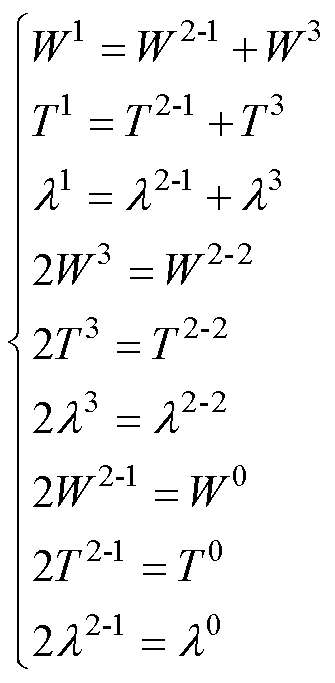 (9)
(9)
式中, 为A相未故障绕组的总磁链,其上标为不同状态编号。由式(9)可以看出,状态S(3)和S(2-1)的转矩和磁链与其他状态下的转矩和磁链呈线性关系,因此在不同励磁电流以及转子位置时可以对所有不同状态下电机的转矩和磁链进行解耦。值得注意的是,在电机不饱和的情况下,由于
为A相未故障绕组的总磁链,其上标为不同状态编号。由式(9)可以看出,状态S(3)和S(2-1)的转矩和磁链与其他状态下的转矩和磁链呈线性关系,因此在不同励磁电流以及转子位置时可以对所有不同状态下电机的转矩和磁链进行解耦。值得注意的是,在电机不饱和的情况下,由于 =
= ,可以得到
,可以得到 。在励磁相铁心不饱和的情况下,仅用状态S(3)的转矩和磁链就能够近似表示所有状态下电机的转矩和磁链。
。在励磁相铁心不饱和的情况下,仅用状态S(3)的转矩和磁链就能够近似表示所有状态下电机的转矩和磁链。
另外,从表2中可以看出,考虑饱和情况下的气隙磁通同样具有永磁分量,且铁心饱和程度越高,永磁转矩越大,这使得AFMHSRM比CAFMSRM转矩更大。同时,永磁体磁通减弱了励磁相定子铁心励磁磁通大小,抑制了铁心的饱和。
为了验证MEC分析的AFMHSRM在转矩方面的优势和解耦特性,在Ansys/Maxwell软件中建立了AFMHSRM与CAFMSRM的3D模型,并进行有限元仿真和比较。为了公平起见,CAFMSRM的结构除了无永磁体外,与AFMHSRM完全相同。在AFMHSRM设计过程中,额定电压为96 V,额定功率和额定转速分别为1 200 W和600 r/min,槽满率和电流密度不超过50%和24 A/mm2,电机的内外径、轴长以及气隙的长度首先被确定,图6为AFMHSRM的几何尺寸示意图,两个电机的具体几何尺寸及参数见表3。
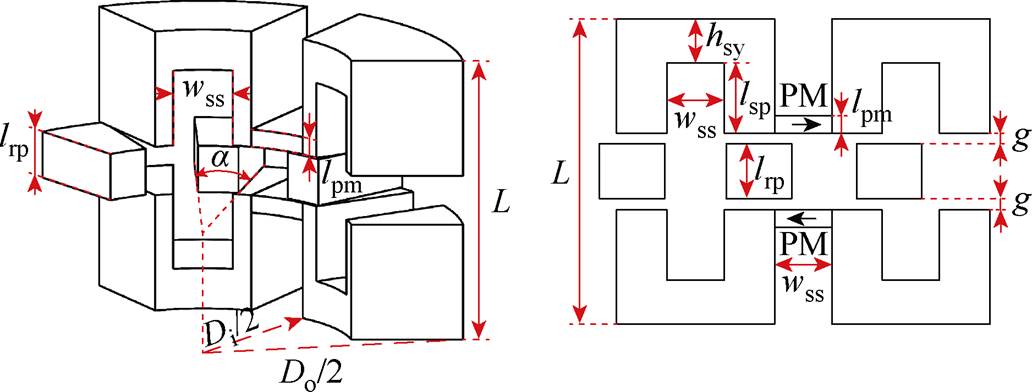
图6 AFMHSRM几何尺寸示意图
Fig.6 Schematic geometry of AFMHSRM
表3 两台电机尺寸及参数
Tab.3 Dimensional parameters of the two prototypes
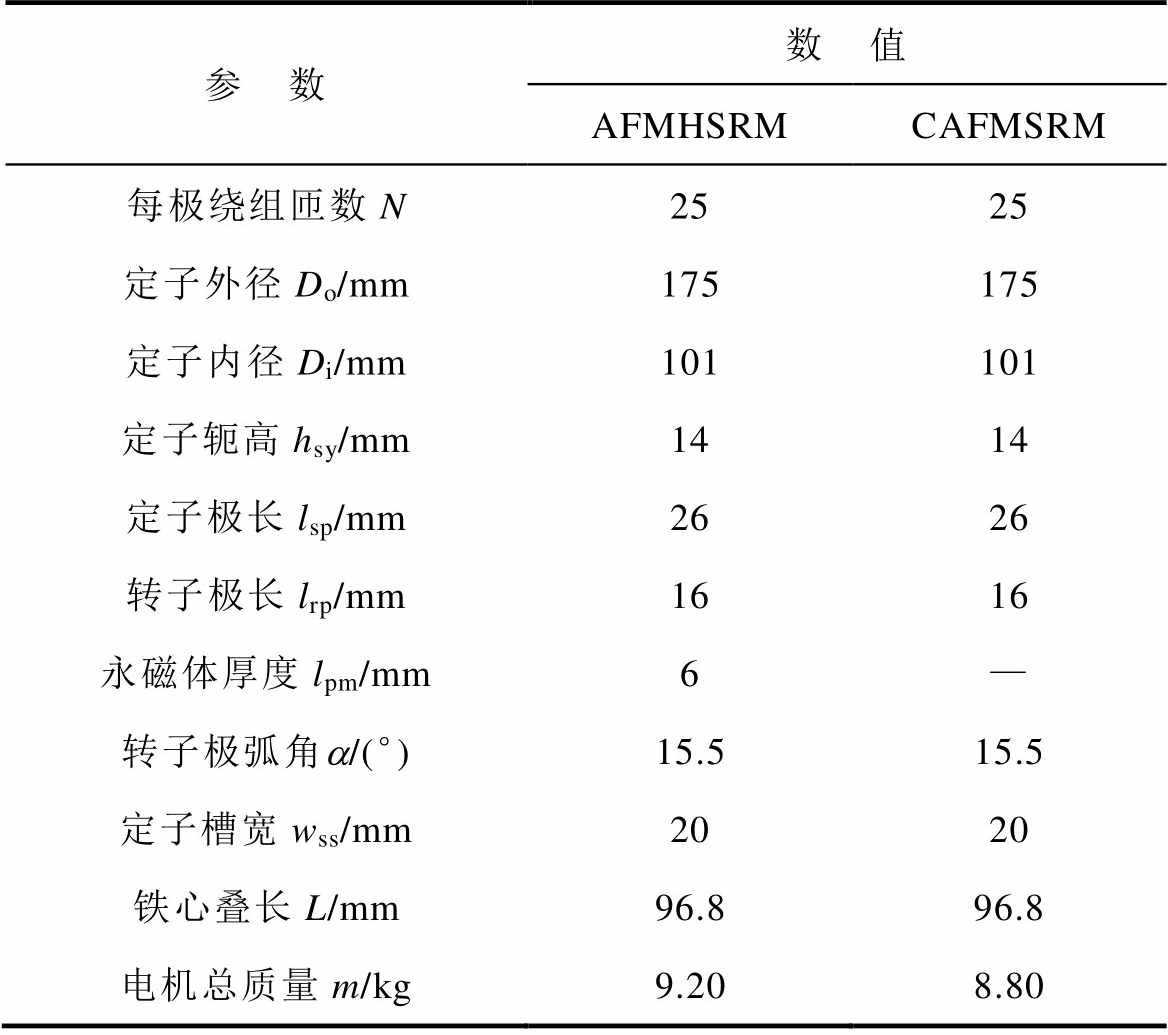
参 数数 值 AFMHSRMCAFMSRM 每极绕组匝数N2525 定子外径Do/mm175175 定子内径Di/mm101101 定子轭高hsy/mm1414 定子极长lsp/mm2626 转子极长lrp/mm1616 永磁体厚度lpm/mm6— 转子极弧角a/(°)15.515.5 定子槽宽wss/mm2020 铁心叠长L/mm96.896.8 电机总质量m/kg9.208.80
永磁体的体积和磁通密度对AFMHSRM的结构和电磁特性都有很大影响。在实际工程应用上,永磁体的宽度与定子槽宽相等,而永磁体厚度明显影响着绕制绕组的空间以及进入定子铁心的磁通量,从而影响永磁转矩。由于永磁体是紧贴定子极底部嵌入,所以定子槽底部长为lpm的空间无法绕制绕组,因此定子槽能够绕制绕组的槽面积Sc可以表示为
 (10)
(10)
式中,lspc为定子极长减去永磁体厚度绕组绕制空间长度。
图7为wss不变条件下,lsp随lpm变化而变化以及仅lpm变化两种不同情况下静态平均转矩与电流的关系。图7a中,为保证槽满率不变,lsp随着永磁体厚度的增大而增大,此时平均转矩会增大到最大值,之后随着永磁体厚度继续增大而降低。对于不同的励磁电流,电机永磁体厚度为6 mm时平均转矩较大。图7b中永磁体厚度越大,静态平均转矩越大,由于受到槽满率和永磁体成本的限制,永磁体厚度无法无限增大。
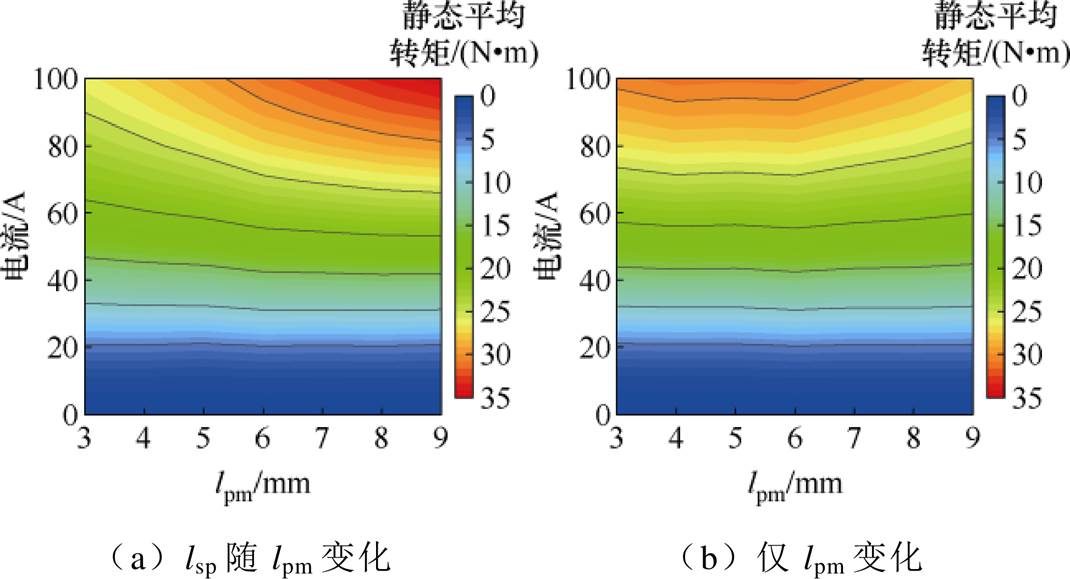
图7 不同电流下平均转矩与永磁体厚度lpm关系曲线
Fig.7 Curves of average torque versus lpm for different currents
图8a展示了AFMHSRM的总转矩、磁阻转矩以及永磁转矩与励磁电流的关系,图8b给出了不同励磁电流下永磁转矩所占总转矩的比例。可以看出,电磁转矩大部分由磁阻转矩提供,永磁转矩提供了辅助作用。励磁电流的增大使得铁心饱和程度增大,永磁转矩分量变大,永磁转矩占比逐渐增大。当电流为30 A时,永磁转矩分量占了总转矩的约15%。与CAFMSRM相比,加入永磁体的AFMHSRM有着更高的转矩和输出功率。
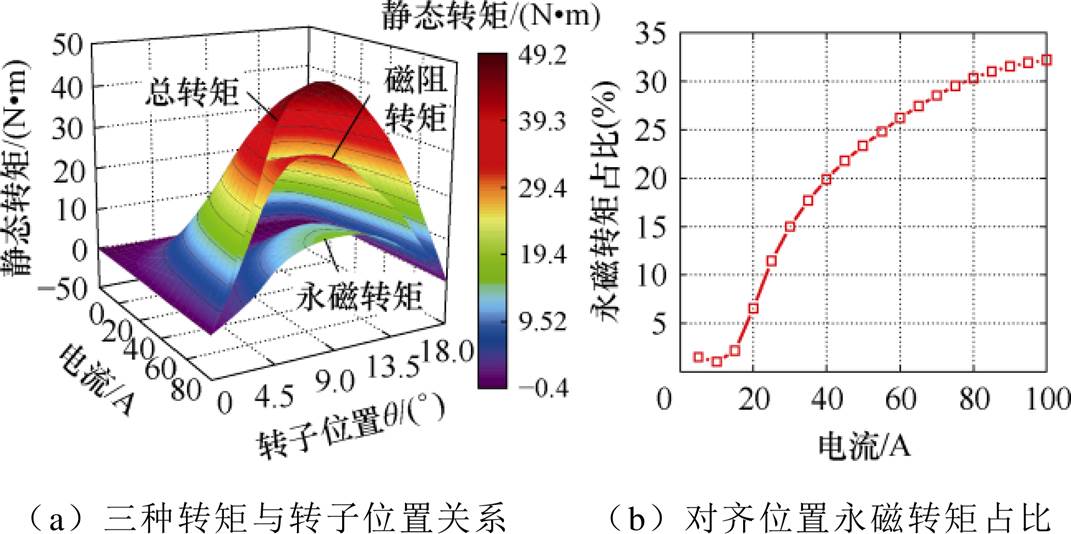
图8 不同电流下AFMHSRM总转矩、磁阻转矩和永磁转矩
Fig.8 AFMHSRM total torque, reluctance torque and permanent magnet torque at different currents
为了验证采用MEC对AFMHSRM解耦特性的分析结果,利用有限元软件对AFMHSRM和CAFMSRM绕组处于不同状态下的静态特性进行分析。图9为不同状态下的两个电机在转子处于对齐位置以及A相绕组以30 A电流激励时的磁通密度分布。可以看出,由于永磁体磁通与励磁磁通的叠加效应,AFMHSRM转子处磁通密度比CAFMSRM更大。AFMHSRM的永磁体磁通抵消了定子轭中一部分励磁磁通,这使得AFMHSRM的定子模块铁心中磁通密度更小,更不易饱和。由于永磁体的作用,AFMHSRM非励磁相和故障绕组所处的定子模块中没有励磁磁通,但仍然会存在永磁体磁通形成约0.5 T的磁通密度,而CAFMSRM除励磁相定子模块铁心之外其他定子模块中磁通密度几乎为0,与磁路分析一致。
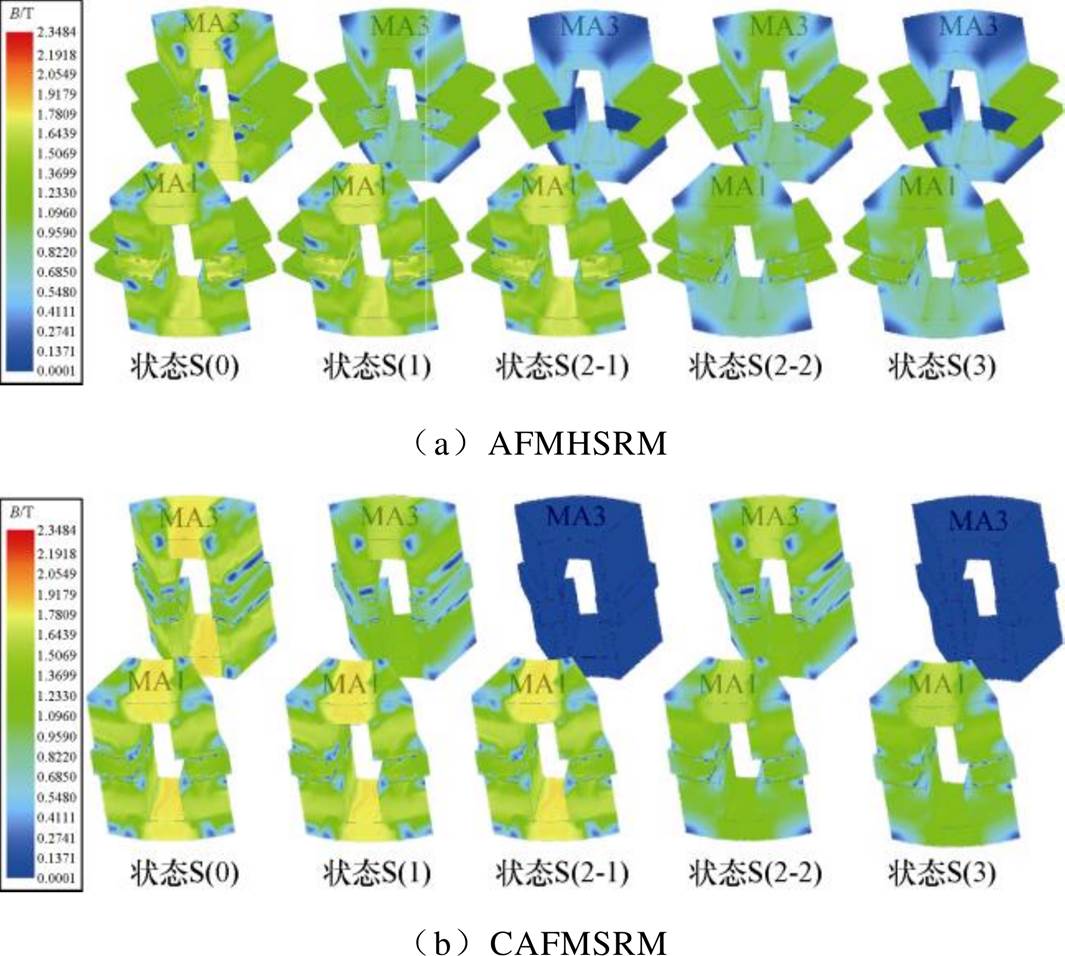
图9 两个电机在30 A励磁电流下的磁通密度云图
Fig.9 Flux density cloud maps of the two motors at 30 A
图10中给出了AFMHSRM和CAFMSRM不同状态下的静态转矩和磁链-转子位置与励磁电流的关系曲线。图10a~图10f中,在较小的励磁电流下,不同状态下AFMHSRM和CAFMSRM的静态转矩很接近。结合表2可知,励磁电流较小时定子模块铁心尚未趋于饱和,穿过气隙的永磁体磁通很小,静态转矩几乎全部由励磁转矩产生,永磁体磁通未产生明显的转矩增强作用。随着励磁电流的增大,定子模块铁心逐渐饱和,永磁体转矩分量越大,AFMHSRM的静态转矩明显比CAFMSRM要大。另外,从图10c~图10f中可以看出,由于MA1-MA2在状态S(2-1)比在S(3)下更容易饱和,因此穿过气隙永磁磁通分量更大,导致了AFMHSRM 在S(2-1)状态下产生明显大于CAFMSRM的静态转矩时所需的励磁电流要更小。图10b中,在绕组处于正常状态下,定子模块铁心饱和程度较低时,永磁体磁通大部分反向通过定子极,AFMHSRM的磁链要明显小于CAFMSRM的磁链,随着电流越来越大,铁心的饱和使得反向抵消励磁磁通的永磁体磁通越来越小,此时AFMHSRM与CAFMSRM产生的磁链越来越接近。
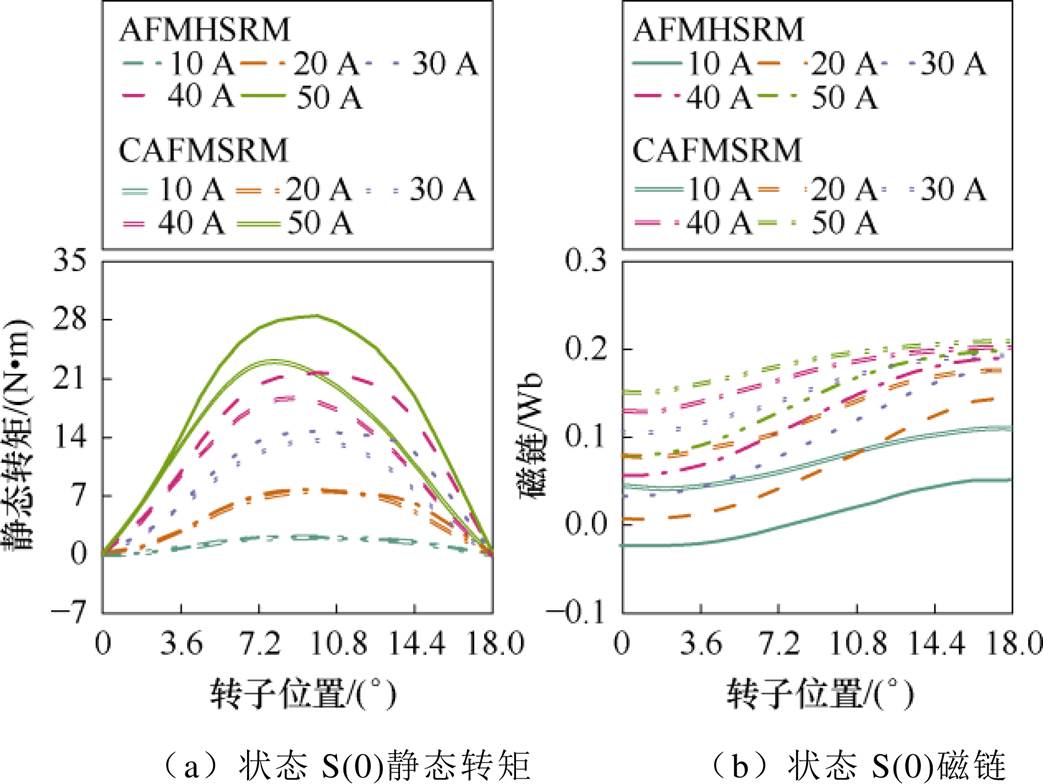
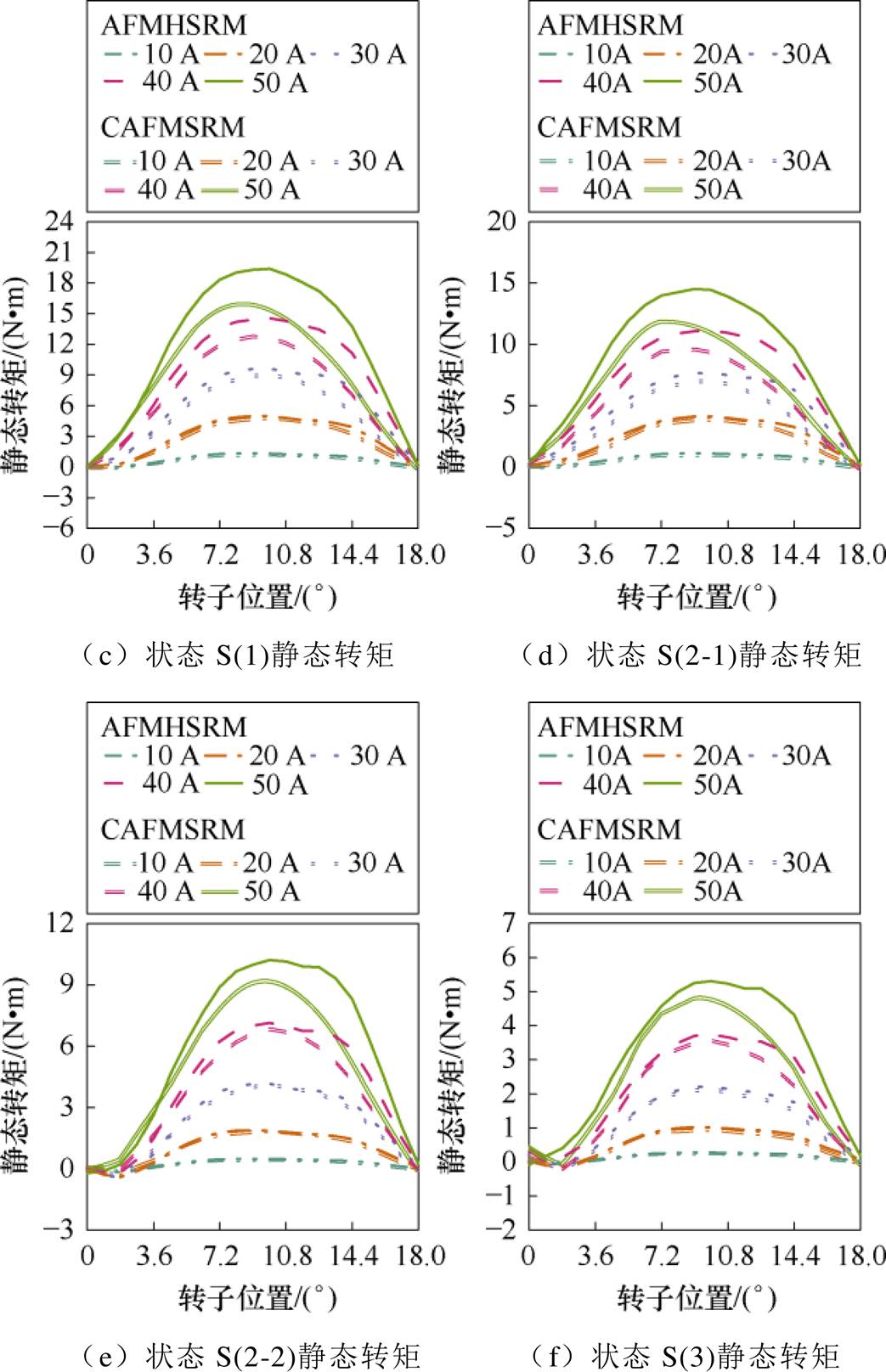
图10 不同状态下AFMHSRM与CAFMSRM在不同电流下的转矩和磁链与转子位置的关系曲线
Fig.10 Curves of torque and flux linkage versus rotor position for AFMHSRM and CAFMSRM at different states with different currents
综上所述,与CAFMSRM相比,无论在故障还是正常状态运行时,AFMHSRM转矩输出能力要高于CAFMSRM,同时具有抑制铁心饱和的能力。
图11中给出了不同状态下的AFMHSRM在不同励磁电流下的转矩和磁链与转子位置的关系曲线。可以看出,虽然励磁电流不同,但AFMHSRM的 、
、 和
和 分别与
分别与 、
、 和
和 相接近,同时,
相接近,同时, 、
、 和
和 与
与 、
、 和
和 几乎相等。这表明,不同状态下AFMHSRM转矩和磁链实现解耦只需要获得状态S(3)和S(2-1)下的转矩和磁链信息,这成倍地减少了有限元的仿真时间,同时也验证了MEC的分析结果。所提的AFMHSRM具有较好的转矩和磁链解耦特性。在不同绕组故障下,永磁体对转矩的提升作用依旧明显,在良好的容错能力下依然具有高转矩输出特性。
几乎相等。这表明,不同状态下AFMHSRM转矩和磁链实现解耦只需要获得状态S(3)和S(2-1)下的转矩和磁链信息,这成倍地减少了有限元的仿真时间,同时也验证了MEC的分析结果。所提的AFMHSRM具有较好的转矩和磁链解耦特性。在不同绕组故障下,永磁体对转矩的提升作用依旧明显,在良好的容错能力下依然具有高转矩输出特性。
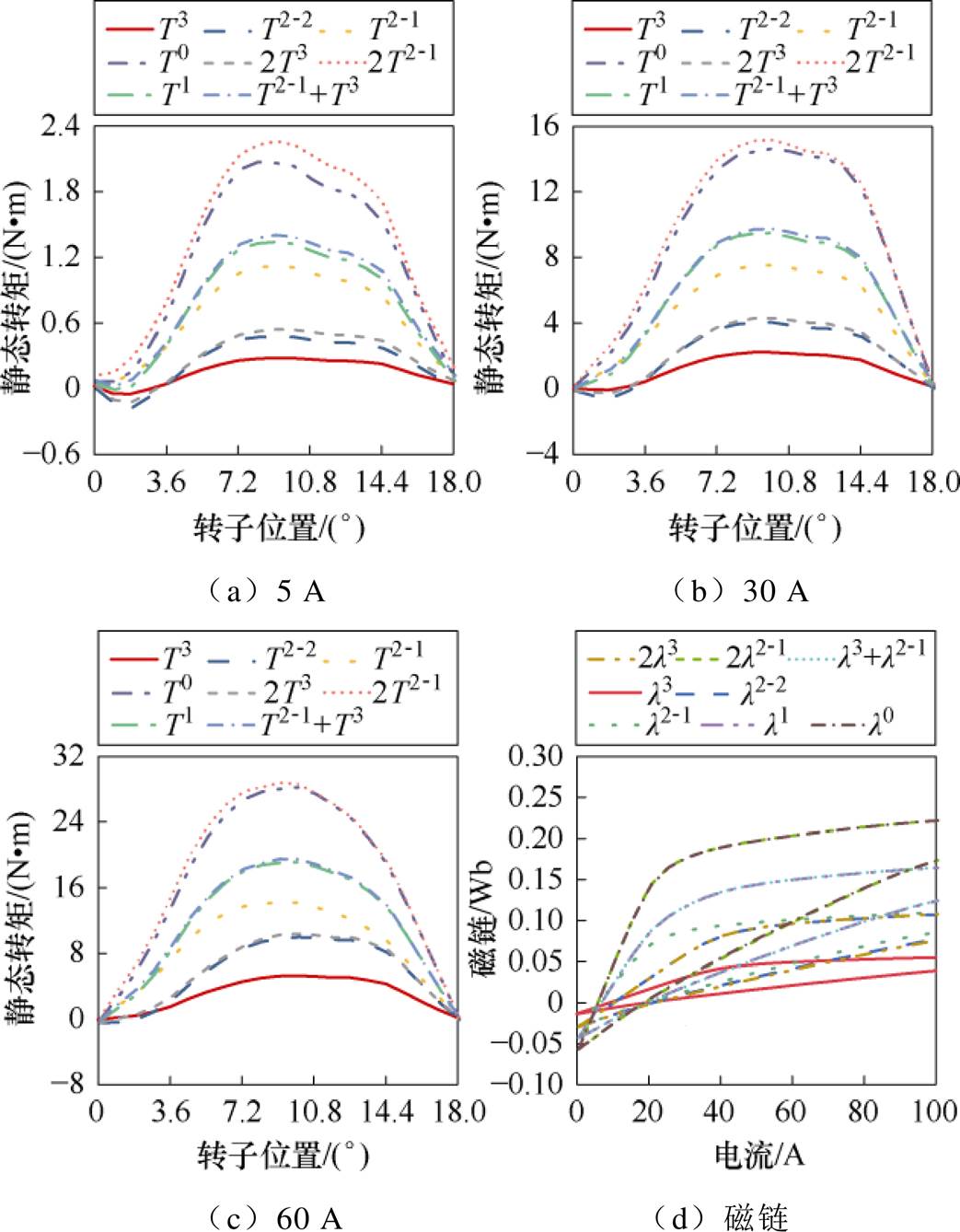
图11 不同状态的AFMHSRM在不同励磁电流下的转矩和磁链与转子位置的关系曲线
Fig.11 Torque and flux linkage versus rotor position curves for different states of AFMHSRM at different excitation currents
对于AFMHSRM而言,A相四个绕组PAk的等效电路可以表示成如图12所示。则A相四个绕组在并联模式下的电压方程[29]为
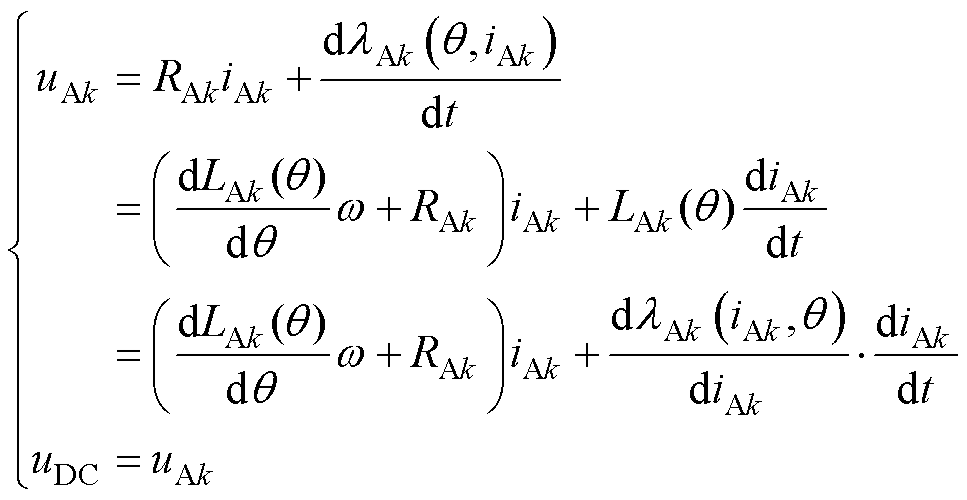 (11)
(11)
式中,uAk、RAk、iAk、 、
、 分别为A相绕组PAk的两端电压、电阻、电流、相电感以及磁链;
分别为A相绕组PAk的两端电压、电阻、电流、相电感以及磁链; 为转子位置角;
为转子位置角; 为电机转速;uDC为直流母线电压。当绕组串联时,相电流iA与经过绕组PAk的电流iAk相等,电压方程可以写成
为电机转速;uDC为直流母线电压。当绕组串联时,相电流iA与经过绕组PAk的电流iAk相等,电压方程可以写成
 (12)
(12)
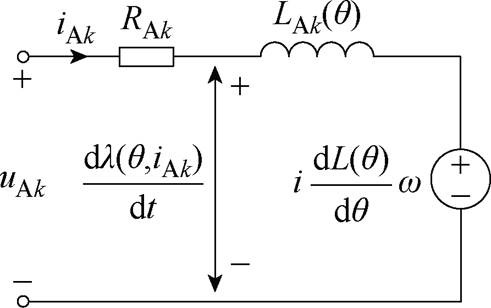
图12 PAk等效电路
Fig.12 Equivalent circuit of PAk
A相绕组串联和并联时总磁链lA-series和lA-parallel以及总转矩TA-series、TA-parallel为绕组PAk产生转矩和磁链的总和,有
 (13)
(13)
式中, ,m和n代表变量上、下标。例如,
,m和n代表变量上、下标。例如, 的下标n=Ak,则表示由
的下标n=Ak,则表示由 =
= 和
和 =组成的矩阵
=组成的矩阵 。
。
根据第2节分析可知,由于MA1-MA2和MA3- MA4之间耦合程度较低,则PA1-PA2和PA3-PA4励磁产生的转矩和磁链是近似解耦的。以PA1-PA2为例,若励磁电流为i,对于状态S(2-1),PA3和PA4发生故障,根据表2可知,穿过MA3-MA4对应的气隙的磁通很小,因此PA3和PA4产生的磁链和转矩为0,则PA1和PA2产生的转矩磁链曲线近似等于状态S(2-1)的转矩磁链曲线 和
和 。此时PA1和PA2各自的转矩磁链曲线关系为:TA1(q, i)=TA2(q, i)=
。此时PA1和PA2各自的转矩磁链曲线关系为:TA1(q, i)=TA2(q, i)= 、
、 =
= =
=  。
。
同理,在状态S(3)情况下的PA1产生的转矩和磁链曲线可以表示成:TA1(q, i)= ,=
,= 。当故障情况相同时,PA3和PA4产生的转矩和磁链与PA1和PA2相同。值得注意的是,上述求解绕组PAk的转矩和磁链的过程与绕组的串并联模式无关,相同的励磁电流i是通过不同状态下总转矩和总磁链求解各个分绕组转矩和磁链的必要条件。因此,绕组PAk励磁的转矩和磁链可以写为
。当故障情况相同时,PA3和PA4产生的转矩和磁链与PA1和PA2相同。值得注意的是,上述求解绕组PAk的转矩和磁链的过程与绕组的串并联模式无关,相同的励磁电流i是通过不同状态下总转矩和总磁链求解各个分绕组转矩和磁链的必要条件。因此,绕组PAk励磁的转矩和磁链可以写为
 (14)
(14)
根据式(11)~式(14)以及查表法得到绕组PAk故障时统一数学模型如图13所示。
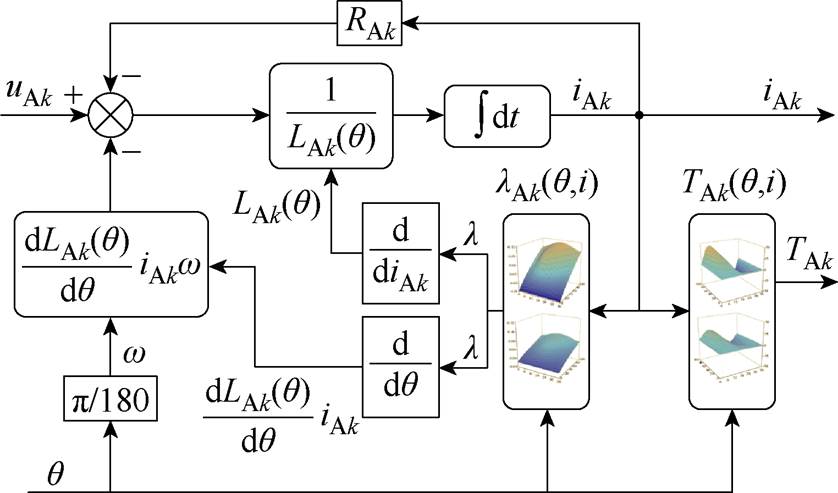
图13 绕组PAk仿真框图
Fig.13 Simulation block diagram of winding PAk
为了分析AFMHSRM和CAFMSRM绕组不同状态下的稳态特性,根据图13搭建了AFMHSRM串联速度闭环电流斩波控制(Current Chopper Control, CCC)和并联速度开环单脉冲控制(Single Pulse Control, SPC)仿真模型。
在AFMHSRM和CAFMSRM绕组串联的情况下,采用CCC闭环控制模式,直流母线电压为96 V,转速为600 r/min,开通角和关断角分别设置为0°和12°。在保证电流密度不超过24 A/mm2的条件下得到AFMHSRM的转矩和电流如图14a所示。不同状态下AFMHSRM和CAFMSRM的平均转矩和转矩脉动如图14b所示。可以看出,相同电流密度下,AFMHSRM绕组故障个数越多,转矩越小。不同状态下,AFMHSRM的转矩总是大于CAFMSRM,同时转矩脉动更低。对于状态S(3),AFMHSRM转矩最大比CAFMSRM要高45.99%;状态S(2-1)时,AFMHSRM转矩脉动最低比CAFMSRM要低12.69%。
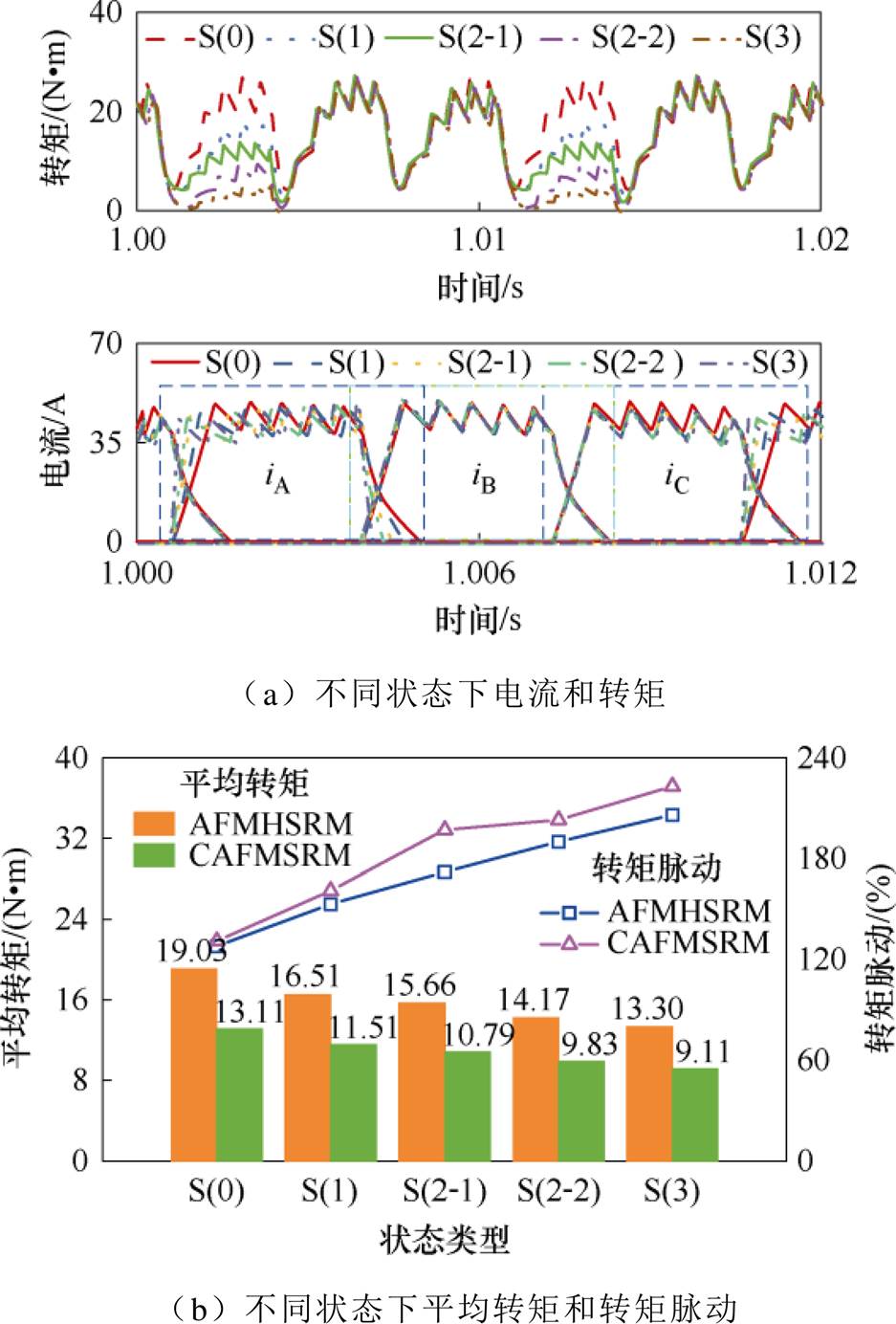
图14 串联CCC模式下AFMHSRM和CAFMSRM动态性能仿真结果
Fig.14 Simulation results of dynamic performance of AFMHSRM and CAFMSRM in series CCC mode
电机在并联连接情况下,采用SPC开环控制模式,开通角和关断角分别设置为0°和12°,直流母线电压为24 V,不同状态下调整负载使得转速稳定在1 000 r/min,得到两种电机的转矩和电流波形如图15所示。相同转速和相同导通关断角下,不同状态下的A相电流iAk满足
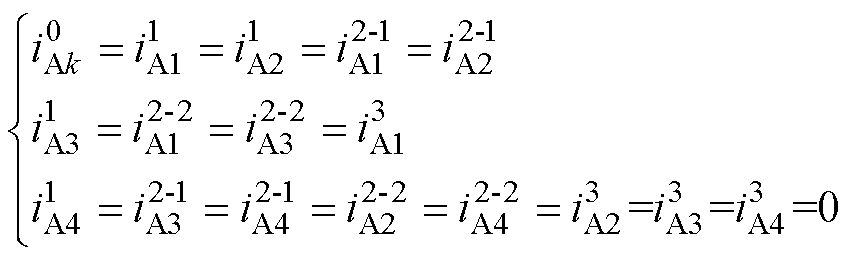 (15)
(15)
图15a为AFMHSRM和CAFMSRM在正常运行下的电流和转矩波形,可以看出,三相绕组并联正常运行下,AFMHSRM具有比CAFMSRM更大的转矩。图15b中展示了S(1)的电流 和
和 的波形和四种不同故障状态下的AFMHSRM的转矩波形。可以看出,AFMHSRM在轴向相对的绕组其中一个出现开路故障时,另一个绕组的电流会增大。虽然状态S(2-1)和S(2-2)转矩磁链曲线不相同,但由于并联情况下
的波形和四种不同故障状态下的AFMHSRM的转矩波形。可以看出,AFMHSRM在轴向相对的绕组其中一个出现开路故障时,另一个绕组的电流会增大。虽然状态S(2-1)和S(2-2)转矩磁链曲线不相同,但由于并联情况下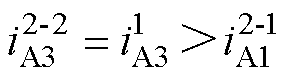 ,故障相转矩反而很相近。图15c中给出了两个电机并联运行不同状态下的平均转矩和转矩脉动。可以看出,与CAFMSRM相比,AFMHSRM在故障下仍然保持转矩和转矩脉动方面的优势。
,故障相转矩反而很相近。图15c中给出了两个电机并联运行不同状态下的平均转矩和转矩脉动。可以看出,与CAFMSRM相比,AFMHSRM在故障下仍然保持转矩和转矩脉动方面的优势。
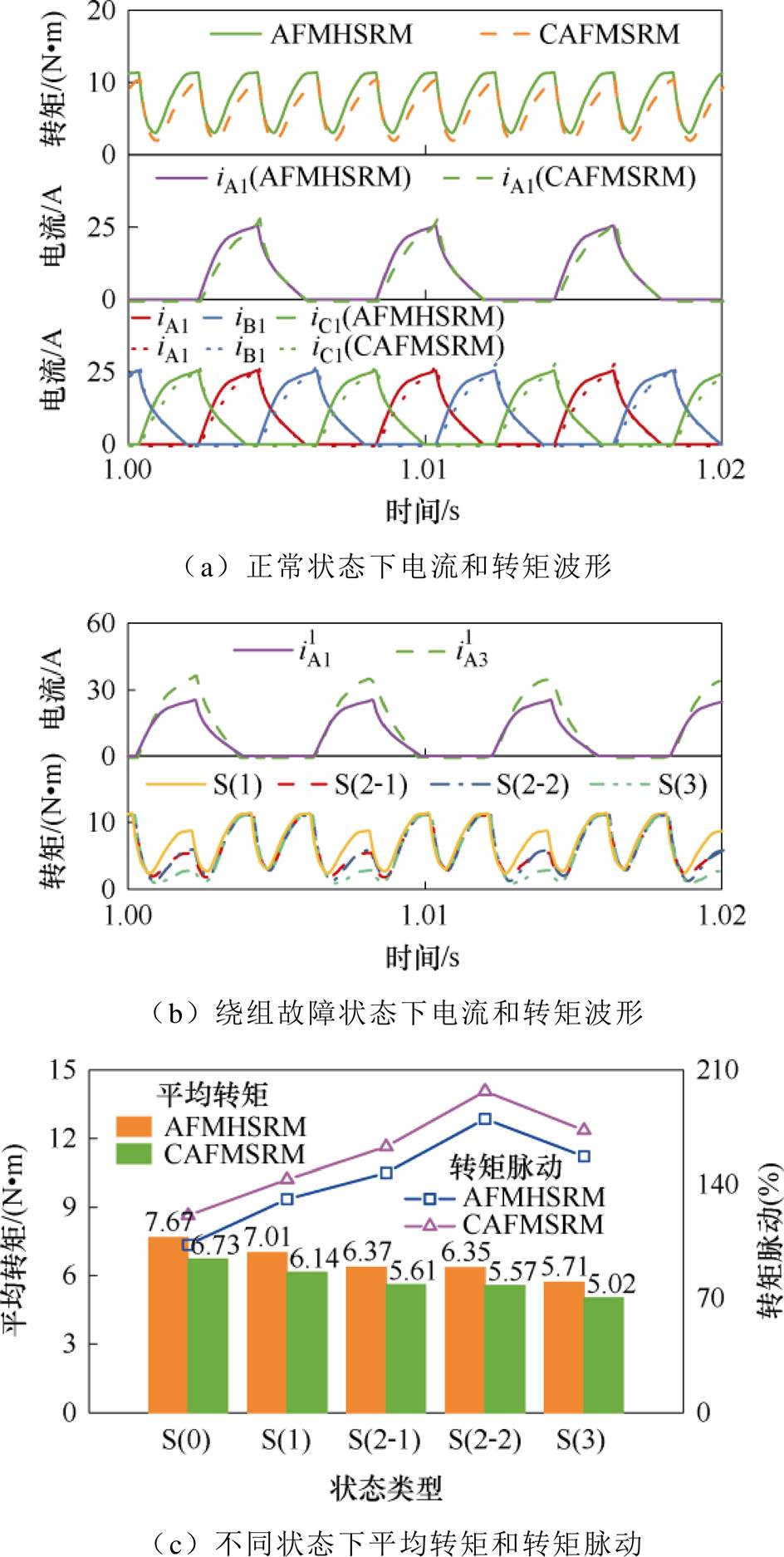
图15 并联SPC模式下AFMHSRM和CAFMSRM动态性能仿真结果
Fig.15 Simulation results of dynamic performance of AFMHSRM and CAFMSRM in parallel SPC mode
为了验证所提电机的有效性以及对绕组故障性能分析和仿真的结果,制作了一台AFMHSRM样机,并进行了实验验证。图16为所提电机的实验平台。AFMHSRM台架主要包括样机、转矩传感器和磁粉制动器。主控制器采用RTU-204控制器输出控制型号和采集数据,功率变换器采用不对称半桥结构,电机绕组串并联通过手动进行连接,另外,还包括转速、电流传感器以及直流电源等模块。
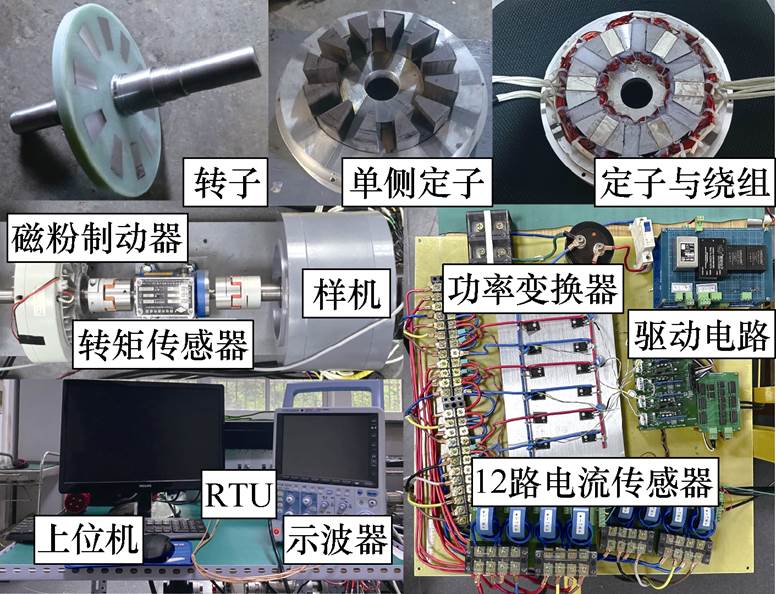
图16 AFMHSRM样机台架和实验平台
Fig.16 AFMHSRM prototypes and experimental platforms
首先,通过实验测量不同状态下的电机A相磁链。为了方便测量不同状态下无故障绕组的励磁电流,未故障绕组采用串联连接。将转子固定在对齐和不对齐位置,通过对串联的A相绕组施加20 V直流电压,当电流达到40 A时关断开关管,得到不同状态下A相绕组在转子位于对齐位置和不对齐位置时的磁链,磁链的有限元仿真和实验结果如图17所示。
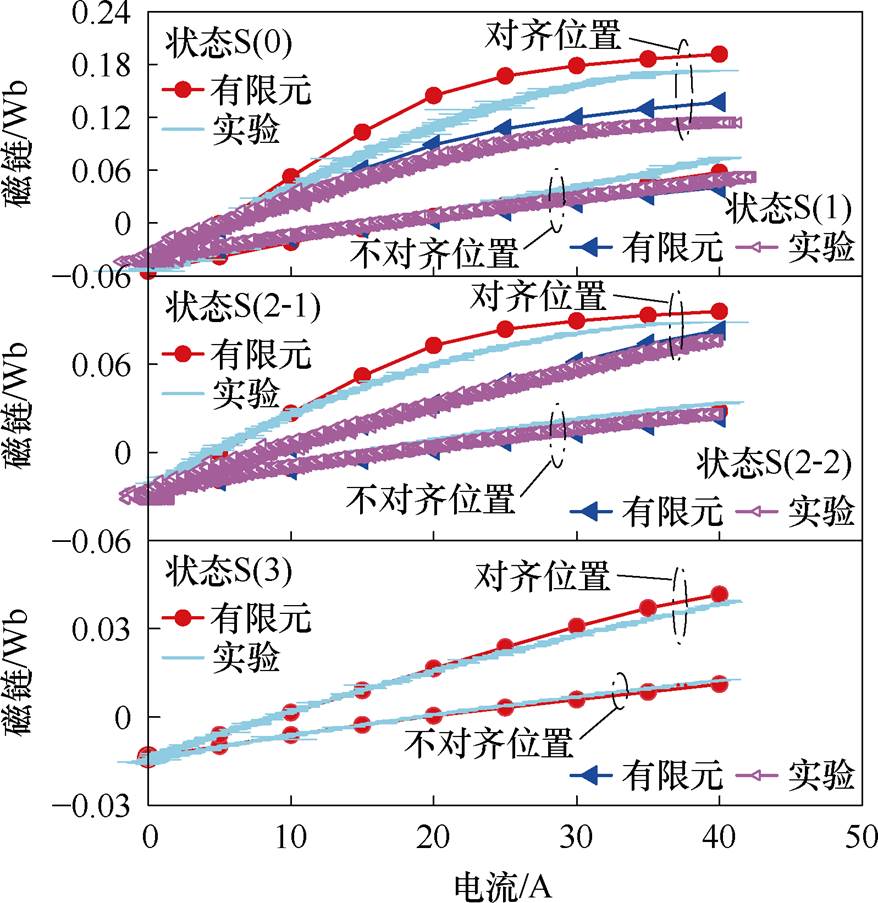
图17 不同状态下绕组磁链有限元仿真和实验结果
Fig.17 Finite element analysis simulation and experimental results of flux linkage for windings in different states
图18和图19分别为串联CCC和并联SPC模式下,AFMHSRM在不同状态下的电流和转矩波形。其中,实验参数设置与仿真设置相同。串联CCC模式下三相电流表示为iA、iB、iC。并联SPC模式下A相各分绕组电流表示为iAk;每相第一个分绕组电流分别表示为iA1、iB1、iC1;在忽略绕组绕制误差的情况下,各相分绕组电流满足图19括号中关系,且B相和C相的各分绕组电流相等;AFMHSRM的总转矩表示为Te。图18和图19中电流和转矩波形与图14和图15中的仿真波形较为一致,验证了所提绕组数学模型和仿真结果的准确性。
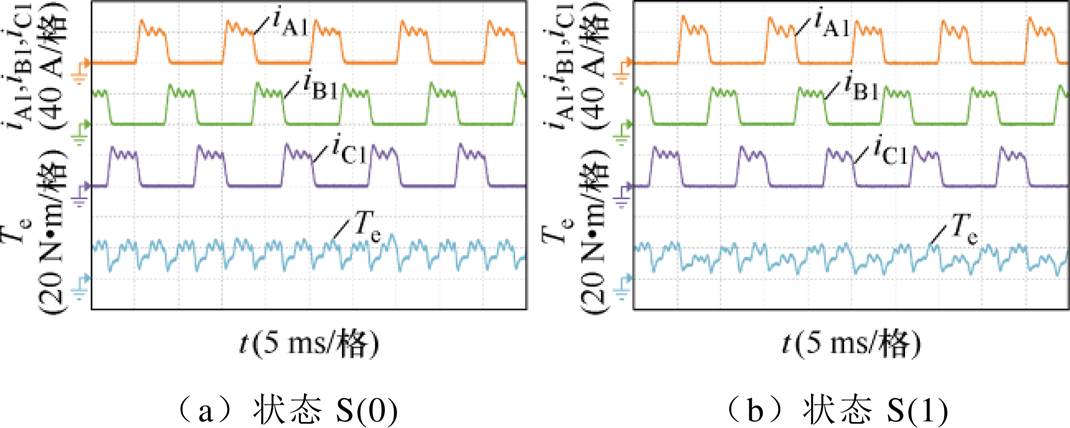
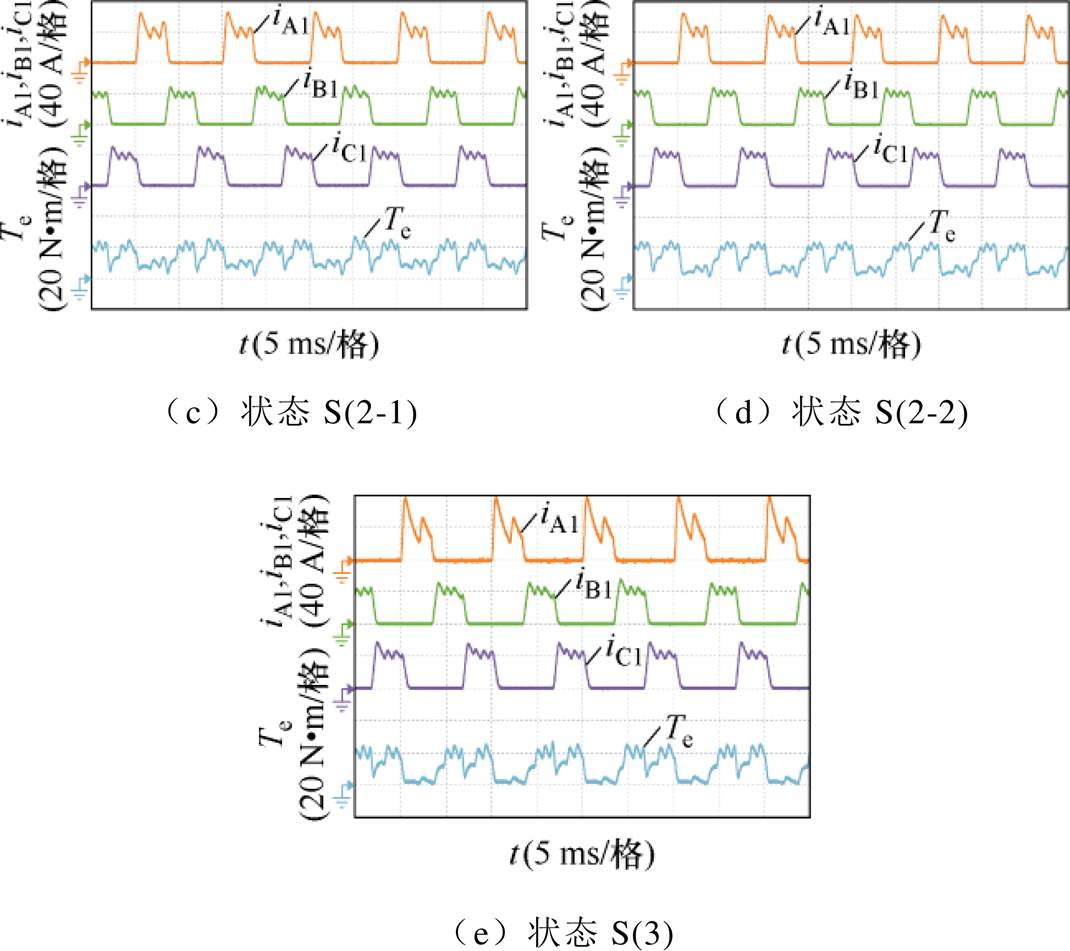
图18 串联CCC模式下AFMHSRM在不同状态的三相电流和电机转矩实验波形
Fig.18 Experimental waveforms of three-phase current and motor torque of AFMHSRM at different states in series CCC mode
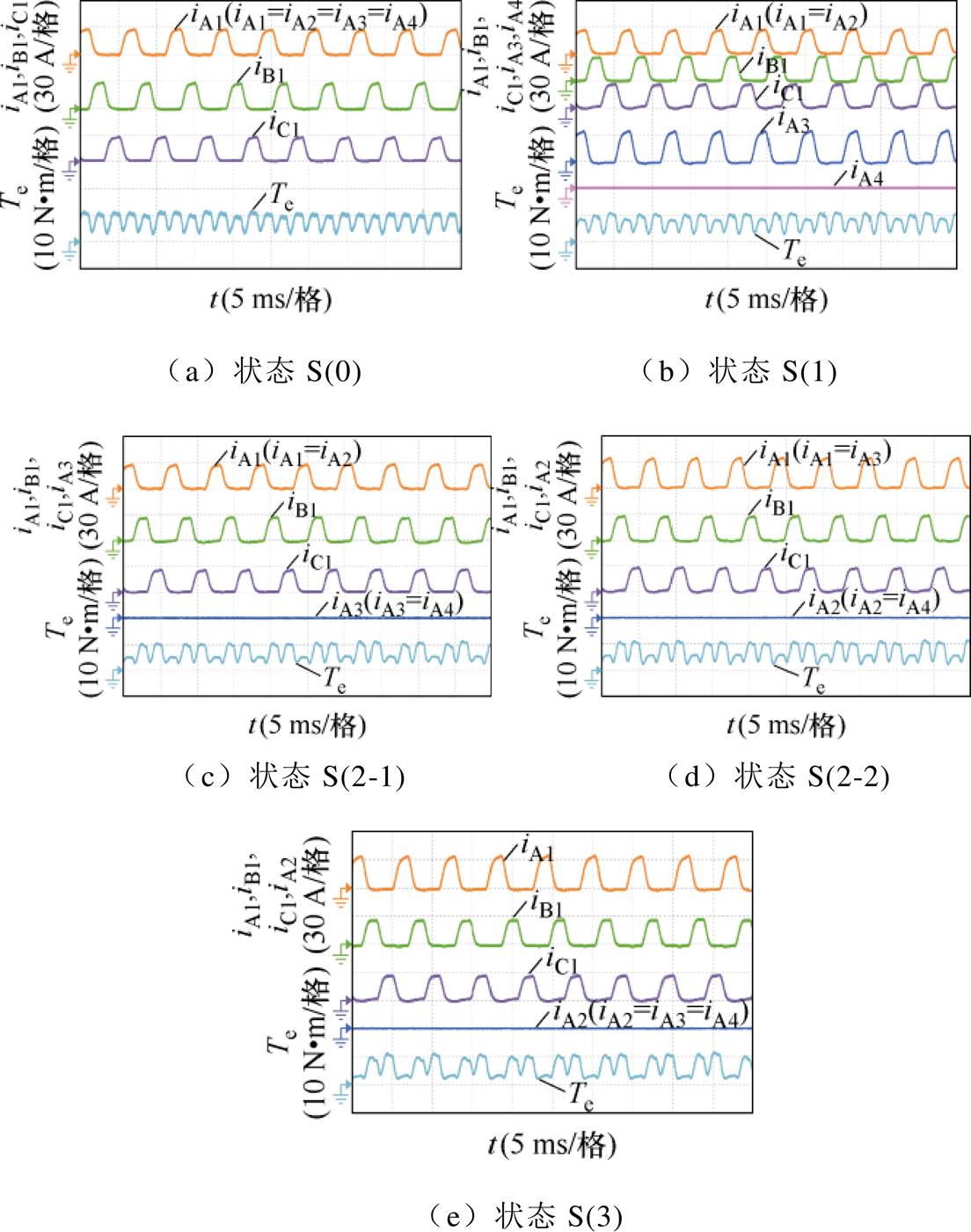
图19 并联SPC模式下AFMHSRM不同状态各相分绕组电流和电机转矩实验波形
Fig.19 Experimental waveforms of sub-winding current and motor torque of each phase in different states of AFMHSRM in parallel SPC mode
本文主要提出了一种新型轴向磁通模块化混合励磁开关磁阻电机,分析了绕组故障时的电磁耦合特性并建立了绕组数学模型,得到的结论如下:
1)所提AFMHSRM的模块化结构减弱了磁耦合并提高了故障冗余能力。通过磁等效电路和有限元方法来分析所提电机转矩和磁链解耦特性,轴向相对的绕组间存在耦合,故障绕组越少,耦合程度越高。
2)绕组不同故障时励磁相定子铁心饱和程度不同,铁心的饱和与永磁体的共同作用是AFMHSRM气隙磁通密度增大和产生更大转矩的重要原因。与CAFMSRM相比,永磁体的引入使得AFMHSRM转矩输出能力最高提升了45.99%,转矩脉动最低降低了12.69%。
3)建立了电机绕组在不同故障下的数学模型并进行了串并联仿真。在单相四个绕组中三个绕组故障的情况下,AFMHSRM仍能产生正常运行时的69.89%的转矩,实验验证了仿真模型的准确性。
参考文献
[1] 方成辉, 陈昊, Galina D, 等. 开关磁阻电机无电流传感器控制方法[J]. 电工技术学报, 2023, 38(2): 365-374.
Fang Chenghui, Chen Hao, Galina D, et al. Current sensorless control method of switched reluctance motors[J]. Transactions of China Electro- technical Society, 2023, 38(2): 365-374.
[2] 于丰源, 陈昊, 闫文举, 等. 宽窄定子极轴向磁通开关磁阻电机的设计与分析[J]. 电工技术学报, 2023, 38(5): 1261-1274.
Yu Fengyuan, Chen Hao, Yan Wenju, et al. Design and characteristic analysis of a wide-narrow stator poles axial flux switched reluctance machine[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1261-1274.
[3] 孙玉坤, 袁野, 黄永红, 等. 磁悬浮开关磁阻电机及其关键技术发展综述[J]. 电工技术学报, 2015, 30(22): 1-8.
Sun Yukun, Yuan Ye, Huang Yonghong, et al. Development of the bearingless switched reluctance motor and its key technologies[J]. Transactions of China Electrotechnical Society, 2015, 30(22): 1-8.
[4] 陈前, 赵美玲, 廖继红, 等. 轻量化高效率永磁电机及其控制技术综述[J]. 电气工程学报, 2023, 18(4): 3-19.
Chen Qian, Zhao Meiling, Liao Jihong, et al. Review on lightweight and high efficiency permanent magnet motor and its control techniques[J]. Journal of Electrical Engineering, 2023, 18(4): 3-19.
[5] 孙德博, 胡艳芳, 牛峰, 等. 开关磁阻电机调速系统故障诊断和容错控制方法研究现状及展望[J]. 电工技术学报, 2022, 37(9): 2211-2229.
Sun Debo, Hu Yanfang, Niu Feng, et al. Status and prospect of fault diagnosis and tolerant control methods for switched reluctance motor drive system[J]. Transactions of China Electrotechnical Society, 2022, 37(9): 2211-2229.
[6] 孙宇亮, 彭兵. 基于阶梯齿的开关磁阻电机尖峰电流削弱方法[J]. 电气技术, 2022, 23(7): 50-55, 63.
Sun Yuliang, Peng Bing. A method for reducing peak current by stepped tooth in switched reluctance motor[J]. Electrical Engineering, 2022, 23(7): 50-55, 63.
[7] 胡艳芳, 康智勇, 孙德博, 等. 基于区间分段转矩分配函数的开关磁阻电机转矩脉动抑制[J]. 电机与控制学报, 2023, 27(10): 54-62.
Hu Yanfang, Kang Zhiyong, Sun Debo, et al. Torque ripple suppression of switched reluctance motor based on interval segmentation torque sharing function[J]. Electric Machines and Control, 2023, 27(10): 54-62.
[8] Madhavan R, Fernandes B G. Axial flux segmented SRM with a higher number of rotor segments for electric vehicles[J]. IEEE Transactions on Energy Conversion, 2013, 28(1): 203-213.
[9] De Castro Teixeira V S, Dos Santos Barros T A, Moreira A B, et al. Methodology for the elec- tromagnetic design of the axial-flux C-core switched reluctance generator[J]. IEEE Access, 2018, 6: 65463-65473.
[10] Labak A, Kar N C. Designing and prototyping a novel five-phase pancake-shaped axial-flux SRM for electric vehicle application through dynamic FEA incorporating flux-tube modeling[J]. IEEE Transa- ctions on Industry Applications, 2013, 49(3): 1276- 1288.
[11] Pan Zhe, Song Shoujun, Ma Ruiqing. A novel axial flux switched reluctance machine with segmented stator and rotor[C]//2017 20th International Con- ference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 2017: 1-6.
[12] Madhavan R, Fernandes B G. Comparative analysis of axial flux SRM topologies for electric vehicle application[C]//2012 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 2012: 1-6.
[13] Nakamura K, Ichinokura O. Super-multipolar per- manent magnet reluctance generator designed for small-scale wind-turbine generation[J]. IEEE Transa- ctions on Magnetics, 2012, 48(11): 3311-3314.
[14] Hasegawa Y, Nakamura K, Ichinokura O. A novel switched reluctance motor with the auxiliary windings and permanent magnets[J]. IEEE Transactions on Magnetics, 2012, 48(11): 3855-3858.
[15] Oh J H, Kwon B I. Design, optimization, and prototyping of a transverse flux-type-switched reluctance generator with an integrated rotor[J]. IEEE Transactions on Energy Conversion, 2016, 31(4): 1521-1529.
[16] Nugraha Y U, Anton Asfani D, Riawan D C, et al. Performance improvement of axial switched reluctance motor using low-cost magnet[C]//2019 6th Inter- national Conference on Electric Vehicular Techno- logy (ICEVT), Bali, Indonesia, 2019: 300-303.
[17] 丁文, 李可, 付海刚. 一种12/10极模块化定子混合励磁开关磁阻电机分析[J]. 电工技术学报, 2022, 37(8): 1948-1958.
Ding Wen, Li Ke, Fu Haigang. Analysis of a 12/10-pole modular-stator hybrid-excited switched reluctance machine[J]. Transactions of China Elec- trotechnical Society, 2022, 37(8): 1948-1958.
[18] Kondelaji M A J, Mirsalim M. Double-stator PM- assisted modular variable reluctance motor for EV applications[C]//2018 9th Annual Power Electronics, Drives Systems and Technologies Conference (PEDSTC), Tehran, Iran, 2018: 236-240.
[19] Jalali Kondelaji M A, Farahani E F, Mirsalim M. Teethed-pole switched reluctance motors assisted with permanent magnets: analysis and evaluation[J]. IEEE Transactions on Energy Conversion, 2021, 36(3): 2131-2140.
[20] 黄朝志, 宋秀西, 郭桂秀, 等. 一种新型混合励磁分段转子开关磁阻电机[J]. 科学技术与工程, 2020, 20(5): 1900-1907.
Huang Chaozhi, Song Xiuxi, Guo Guixiu, et al. A novel type of hybrid excitation switched reluctance motor with segmental rotors[J]. Science Technology and Engineering, 2020, 20(5): 1900-1907.
[21] Ghaffarpour A, Mirsalim M. Split-tooth double-rotor permanent magnet switched reluctance motor[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2): 2400-2411.
[22] Wang Huijun, Li Fangxu. Design consideration and characteristic investigation of modular permanent magnet bearingless switched reluctance motor[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4326-4337.
[23] 闫文举, 陈昊, 马小平, 等. 不同转子极数下磁场解耦型双定子开关磁阻电机的研究[J]. 电工技术学报, 2021, 36(14): 2945-2956.
Yan Wenju, Chen Hao, Ma Xiaoping, et al. Development and investigation on magnetic field decoupling double stator switched reluctance machine with different rotor pole numbers[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2945- 2956.
[24] Sun Wei, Li Qiang, Sun Le, et al. Development and investigation of novel axial-field dual-rotor segmented switched reluctance machine[J]. IEEE Transactions on Transportation Electrification, 2021, 7(2): 754-765.
[25] 韩守义. 六相开关磁阻电机绕组拓扑及其容错技术研究[D]. 南京: 南京航空航天大学, 2020.
Han Shouyi. Research on winding topology and fault tolerance technology of six-phase switched reluctance motor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020.
[26] Kianinezhad R, Nahid-Mobarakeh B, Baghli L, et al. Modeling and control of six-phase symmetrical induction machine under fault condition due to open phases[J]. IEEE Transactions on Industrial Elec- tronics, 2008, 55(5): 1966-1977.
[27] Ullah S, McDonald S P, Martin R, et al. A permanent magnet assist, segmented rotor, switched reluctance drive for fault tolerant aerospace applications[J]. IEEE Transactions on Industry Applications, 2019, 55(1): 298-305.
[28] Ding Wen, Hu Yanfang, Wu Luming. Investigation and experimental test of fault-tolerant operation of a mutually coupled dual three-phase SRM drive under faulty conditions[J]. IEEE Transactions on Power Electronics, 2015, 30(12): 6857-6872.
[29] Gan Chun, Li Xue, Yu Zhiyue, et al. Modular seven-leg switched reluctance motor drive with flexible winding configuration and fault-tolerant capability[J]. IEEE Transactions on Transportation Electrification, 2023, 9(2): 2711-2722.
Abstract Axial flux switched reluctance motors (AFSRM) are widely used due to the advantages of high torque density. The dual-stator axial motor with stator modularity and PMs can significantly improve the fault tolerance and torque output capability of AFSRM. An axial flux modular-double-stator hybrid-excitation SRM (AFMHSRM) with high torque performance and fault-tolerant redundancy capability is designed. This motor’s coupling characteristics and performance under different winding faults are analyzed.
Firstly, the topology of AFMHSRM and its working principle are analyzed. The redundancy capability of the motor in case of failure is improved by modularizing the stator, while the PM is used for hybrid excitation to improve the motor output torque capability. Subsequently, the magnetic flux path coupling characteristics of the proposed motor are qualitatively analyzed by the equivalent magnetic circuit (MEC), and the torque enhancement produced by hybrid excitation is theoretically discussed. In addition, the magnetic flux path in case of winding fault is decoupled, and the relationship between torque and flux is given. The static torque characteristics of the proposed motor and the conventional axial flux modular-double-stator SRM (CAFMSRM) are compared by the finite element software Ansys/Maxwell when the windings are excited with a current of 30 A under different fault conditions. The hybrid excitation with PM of the AFMHSRM has higher output torque than CAFMSRM. A unified simulation model of the AFMHSRM winding with different fault states is established, and the dynamic performance of the AFMHSRM and CAFMSRM is simulated. In the series current chopper control (CCC) control mode, the torque of AFMHSRM is up to 45.99% higher than that of CAFMSRM, and the torque ripple of AFMHSRM is 12.69% lower than that of CAFMSRM. In parallel single pulse control (SPC) mode, the AFMHSRM has greater torque and lower torque ripple than the CAFMSRM. Finally, the accuracy of the static and dynamic performance analysis is verified by a prototype.
The following conclusions can be drawn. (1) The modular structure of the proposed AFMHSRM attenuates the magnetic coupling and improves the fault redundancy capability. (2) The introduction of PMs results in the highest increase of torque output capability by 45.99% and the lowest reduction of torque ripple by 12.69% of the AFMHSRM, compared to the CAFMSRM. (3) In a single-phase failure of three out of four windings, the AFMHSRM can still produce 69.89% of the torque during normal operation.
keywords:Axial flux switched reluctance motor, modular stator, hybrid excitation, winding faults, electromagnetic performance
DOI: 10.19595/j.cnki.1000-6753.tces.240102
中图分类号:TM352
深圳市协同创新专项计划国际合作研究项目(GJHZ20220913144400001)、江苏省现代农机装备与技术示范推广项目(NJ2023-27)和深圳市基础研究专项(自然科学基金)重点项目(JCYJ20220818100000001)资助。
收稿日期 2024-01-16
改稿日期 2024-02-05
王国平 男,1996年生,博士研究生,研究方向为开关磁阻电机及其应用。E-mail: poyin_ping@cumt.edu.cn
陈 昊 男,1969年生,教授,博士生导师,研究方向为新型电机系统及其控制。E-mail: hchen@cumt.edu.cn(通信作者)
(编辑 崔文静)