 、
、 分别为转子参考转速和实际转速;
分别为转子参考转速和实际转速; 、
、 分别为k时刻定子电压和电流;
分别为k时刻定子电压和电流; 、
、 分别为k时刻定子和转子磁链估计值;
分别为k时刻定子和转子磁链估计值; 、
、 分别为k+2时刻电机转矩和定子磁链预测值;
分别为k+2时刻电机转矩和定子磁链预测值; 为电机电磁转矩参考值;
为电机电磁转矩参考值; 为定子磁链参考值;
为定子磁链参考值; 为输出最优电压矢量。MPDTC方法是根据定子电压与电流以及转子转速计算得到当前时刻定转子磁链估计,然后对下一时刻定子磁链和转矩进行预测,选择使目标函数最小的电压矢量,对逆变器进行控制,实现MPDTC策略。
为输出最优电压矢量。MPDTC方法是根据定子电压与电流以及转子转速计算得到当前时刻定转子磁链估计,然后对下一时刻定子磁链和转矩进行预测,选择使目标函数最小的电压矢量,对逆变器进行控制,实现MPDTC策略。摘要 异步电机变频驱动系统在运行过程中会产生大量谐波,引发电机转矩脉动、损耗加重等问题,给电机性能及效率带来直接影响,因此有针对性地控制或消除驱动系统的谐波具有重要的研究意义。该文创新性地提出一种带有自适应谐波消除策略的模型预测直接转矩控制(AHE- MPDTC)方法,首次将自适应谐波消除策略引入到模型预测直接转矩控制中,通过调整自适应滤波器的权重,从目标函数得到的主输入信号中消除不期望出现的频率分量,从而获得较为理想的变换器输入参考电压。测试结果表明,所提出的方法在保证系统响应速度的基础上,可以有效消除由于变换器引起的5~25次谐波,从而提升异步电机调速系统的稳定性。
关键词:异步电机 变频驱动 模型预测控制 自适应谐波消除
三相感应电机具有结构简单、运行可靠、成本低廉等优点,广泛应用于航空航天、钢铁、电力等工业领域[1]。但由于电机结构设计、气隙磁场畸变以及逆变器死区效应等非线性因素,导致输出电流含有大量谐波,同时还会引起转矩脉动,影响其正常运行,严重时还会导致生产工艺或机电系统故障[2]。
国内外学者针对如何有效消除电流谐波进行了大量研究工作,大致可以分为两方面:一方面是针对电机本体结构设计产生的空间谐波[3],主要包括采用磁性槽楔定子和闭口槽转子,定、转子槽数接近,两套定子绕组等措施直接优化电机磁阻与内部磁动势,以消除定子输出电流谐波,但这些方法使电机结构复杂化,对机械设计也提出了较高的要求,从而增加电机加工成本;另一方面是针对由逆变器管压降和死区时间等非线性因素引起的时间谐波,采用主动控制策略以消除电机电流谐波。文献[4-7]针对逆变器死区时间提出了一些有效的补偿策略,通过分析死区补偿时间与相位死区补偿电压之间的关系,推导死区补偿时间解析方程,得到死区补偿电压幅值,用于补偿逆变器死区时间引起的干扰电压,以消除死区给逆变器输出电压带来的谐波。死区时间补偿方法在一定程度上可以消除谐波带来的危害,但比较难监测到开关管开启/关闭时间以及导通电压。随后,一些学者开始对逆变器调制方式进行改进,用来消除谐波对系统运行的影响。文献[8]提出了一种十八边形空间矢量结构的逆变器拓扑,消除了相电压中的5、7、11和13次谐波,具有较好的效果,但该拓扑需要多个直流源来提供有功功率,使得驱动系统的四象限操作变得困难且成本较高。在感应电机弱磁控制方式下,文献[9]采用一种扩展跟踪电压方法来抑制电流谐波,但需要对过调制谐波进行建模,分析过程必须使用坐标变换和电机复阻抗,不仅会增加计算量,还可能使计算过程变得复杂难以理解。
此外,通过增加滤波器可以有效消除谐波,文献[10-11]通过有源滤波消除电机驱动器前端非线性元件产生的谐波电流,并针对电压源型逆变器进行输出阻抗建模分析以及建立系统的谐波等效电路。文献[12]在此基础上提出了虚拟谐波阻抗的方法,通过采用谐波含量负反馈控制实现了虚拟谐波阻抗大小的自适应变化。此外,电压环采用改进的比例-积分-谐振(Proportional-Integral-Resonance, PIR)控制器,可以准确跟踪交流信号。文献[13]采用LCR的无源滤波器,将LCR插在PWM逆变器输出端子和电机端口之间,可以消除电机端口处的PWM谐波。文献[14]提出了一种基于谐振数字滤波器的转矩脉动抑制方法,该方法利用谐振控制器生成谐波电压补偿信号,以消除电流环PI控制器输出电压中的谐波成分,并对输出电压进行数字滤波以降低定子中的谐波电流含量,从而达到抑制转矩脉动的目的。文献[15]提出一种基于拉格朗日插值法的几何约束优化重复控制器,通过优化插值系数,保证重复控制器的谐振频率与电机电流实际谐波频率相匹配,以抑制电机输出谐波电流。
通过各种滤波器实现谐波消除的方法会使得系统设计过程复杂,于是一些文献提出前馈控制方法,其易于实现且不需要提取电流谐波的过程。针对中压电机驱动模块化多电平变换器存在的严重低频波动,文献[16]将测量出的谐波电流通过反馈和前馈的方式抑制低频工作时的输出电流谐波,实现了输出控制性能的提升和效率的提高。还有学者提出了一种基于线性神经元的非正弦反电动势永磁同步电机电流谐波抑制方法,其充分考虑了死区效应,通过前馈自调谐补偿电压有效地抑制了电流谐波。该方法不受反电动势谐波分量和死区效应的影响,也无需提取电流谐波,更易于实现[17]。文献[18]通过利用迭代学习和前馈的复合补偿方法,在角度域消除转子位置的周期扰动和常值扰动,以达到减小电流谐波的目标。
虽然前馈控制方法能够在一定程度上实现对逆变器死区产生谐波的抑制,但存在系统参数整定困难、计算量大等问题,且降低了在工程应用中的可靠性。近年来,国内外学者开始研究在变换器控制策略上进行改进,以提升系统谐波消除效果,文献[19-20]针对5、7次低阶电流谐波,采用电流闭环算法获得谐波电流并计算得到适当的补偿电流后,注入原矢量控制算法中,以减少谐波对系统带来的影响。文献[21]利用准比例复数积分调节器实现谐波电流消除控制的新技术,可以直接针对特定的谐波电流实施控制,实现谐波抑制的目标。文献[22]对地铁牵引永磁同步电机电流谐波构造了一种新的电流谐波失真最小化PWM(Current Harmonic distortionMinimization PWM, CHMPWM)算法,该方法在任意调制指标和负载角下都具有较好的谐波消除性能。于是,越来越多改进的变换器控制策略也被应用于消除电机产生的谐波电流。
为了消除异步电机输出电流5~25次谐波,本文提出一种带有自适应谐波消除的模型预测直接转矩控制策略,通过对异步电机磁链和转矩控制环分别进行自适应谐波控制,得到需要消除的磁链谐波电压分量以及转矩谐波电压分量,注入到模型预测直接转矩控制(Model Predictive Direct Torque Control, MPDTC)目标函数生成的最优MT轴电压中,抵消电压中的谐波,生成逆变器参考电压矢量。通过以上控制方式,能够提高异步电机系统稳定性且有效地抑制了电机定子电流中的谐波。最后通过实验验证了所提出控制方法的正确性。
模型预测控制(Module Predictive Control, MPC)是一种基于离散数学模型的优化控制算法,本文提出的异步电机MPDTC方案如图1所示,图中、分别为转子参考转速和实际转速;、分别为k时刻定子电压和电流;、分别为k时刻定子和转子磁链估计值;、分别为k+2时刻电机转矩和定子磁链预测值;为电机电磁转矩参考值;为定子磁链参考值;为输出最优电压矢量。MPDTC方法是根据定子电压与电流以及转子转速计算得到当前时刻定转子磁链估计,然后对下一时刻定子磁链和转矩进行预测,选择使目标函数最小的电压矢量,对逆变器进行控制,实现MPDTC策略。
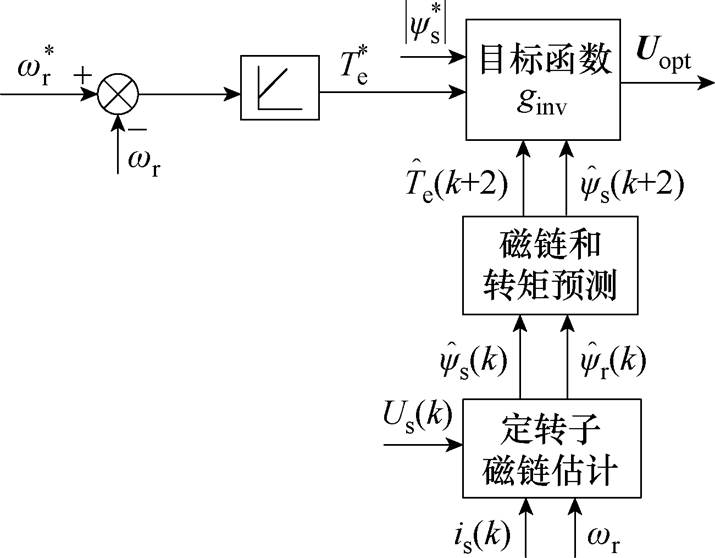
图1 异步电机模型预测直接转矩控制结构
Fig.1 Structure diagram of MPDTC for asynchronous motor
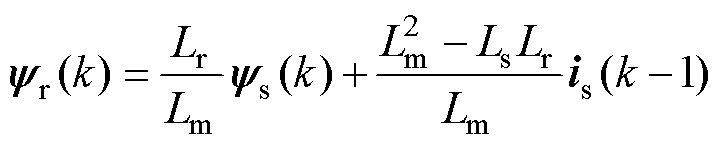
根据图1所示,由定子电压表达式与一阶前向欧拉公式离散化可得k时刻定子磁链和转子磁链预测矢量为
 (1)
(1)
 (2)
(2)
式中, 、
、 分别为k时刻预测得到的定子磁链和转子磁链矢量;
分别为k时刻预测得到的定子磁链和转子磁链矢量; 为k-1时刻的定子电压矢量;
为k-1时刻的定子电压矢量; 为k-1时刻的定子电流矢量;
为k-1时刻的定子电流矢量; 为采样周期;
为采样周期; 为定子电阻;
为定子电阻; 、
、 、
、 分别为定转子互感、定子电感、转子电感。
分别为定转子互感、定子电感、转子电感。
可得k+1时刻定子磁链预测矢量表达式为
 (3)
(3)
通过异步电机定子动态方程可以得到定子电流预测矢量为
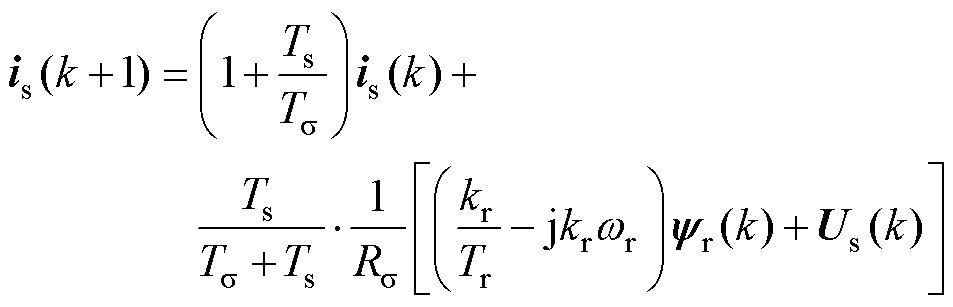 (4)
(4)
其中
式中, 为k时刻的定子电压矢量;
为k时刻的定子电压矢量; 为k时刻的定子电流矢量;
为k时刻的定子电流矢量; 为等效电阻;
为等效电阻; 为定子离散时间常数;
为定子离散时间常数; 为电机漏感;
为电机漏感; 为漏感系数;Tr为转子离散时间常数;kr为转子耦合因数。
为漏感系数;Tr为转子离散时间常数;kr为转子耦合因数。
根据电机模型可得k+1时刻电磁转矩Te的预测表达式为
 (5)
(5)
式中,p为电机极对数。
感应电机MPDTC策略是将逆变器电压矢量代入至定子磁链、定子电流和转矩预测模型,得到下一时刻的定子磁链和转矩,将预测得到的磁链和转矩代入表征系统控制性能的目标函数,并将令目标函数最小的电压矢量作为输出,得到逆变侧最优电压矢量,该矢量的选取应使得电磁转矩和定子磁链值都尽可能地接近给定参考值,可定义目标函数为
 (6)
(6)
式中, 和
和 分别为电磁转矩和定子磁链参考值;
分别为电磁转矩和定子磁链参考值; 为权重系数。
为权重系数。
考虑到数字控制系统存在的一拍延迟问题,通常将式(6)调整为
 (7)
(7)
式中, 为k+2时刻估计得到的电磁转矩值;
为k+2时刻估计得到的电磁转矩值; 为k+2时刻估计得到的定子磁链值。
为k+2时刻估计得到的定子磁链值。
由于逆变器死区时间的设置,使其输出电压含有大量高次谐波,直接导致了输入到电机绕组的电流含有同样的谐波成分,致使电机电流中存在一定的5、7、11、13次等谐波。以基波方向为正方向,在三相坐标系下,7、13次谐波方向为正,5、11次谐波方向为反。
在静止的三相ABC坐标系下,电流方程表示为
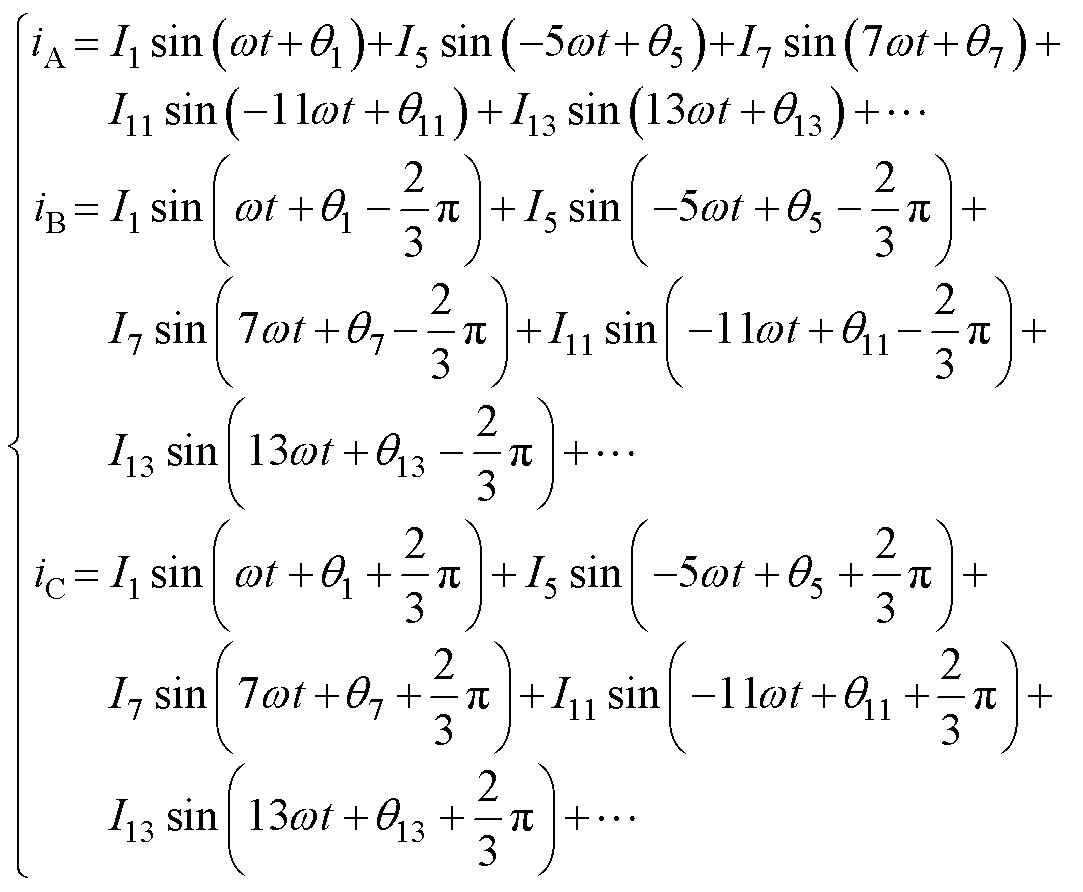 (8)
(8)
式中,I1为基波幅值; 为基波角频率;
为基波角频率; 为基波的初始相位;I5、I7、I11、I13分别为5、7、11、13次谐波电流的幅值;
为基波的初始相位;I5、I7、I11、I13分别为5、7、11、13次谐波电流的幅值; 、
、 、
、 、
、 分别为5、7、11、13次谐波的初始相位。
分别为5、7、11、13次谐波的初始相位。
将上述在ABC轴系中三相电流变换到同步旋转MT轴系下,可以得到定子绕组MT中的电流为
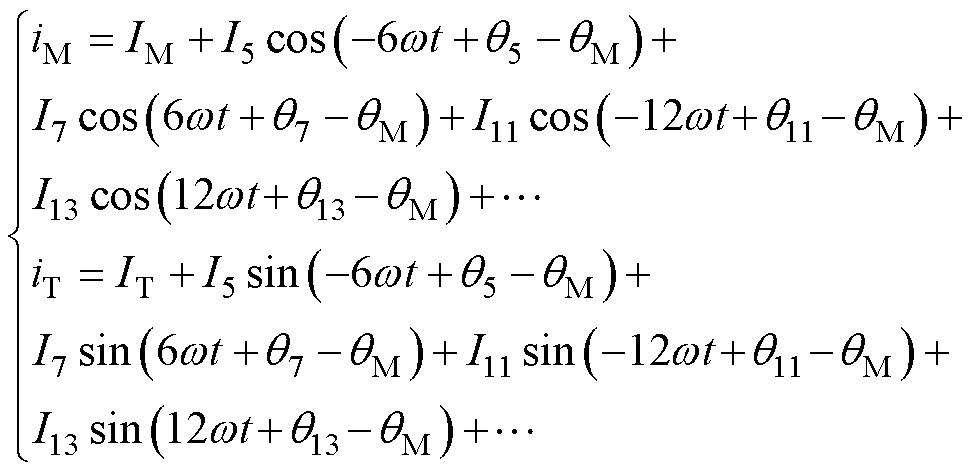 (9)
(9)
式中, 、
、 分别为基波电流的M、T轴分量;
分别为基波电流的M、T轴分量; 为M轴与d轴的电角度。
为M轴与d轴的电角度。
自适应谐波消除(Adaptive Harmonic Elimin- ation, AHE)器是通过比较输入信号与期望信号之间的差异来调整谐波消除器的参数,以适应在目标数据未知的情况下,通过递归算法完成消除器的构建。
自适应谐波消除方案的目标是通过自适应算法估计具有不确定性的干扰yn,以滤除主输入dn中的谐波干扰分量。本文采用最小均方(Least Mean Square, LMS)自适应算法用于估计谐波干扰分量,同时在线更新余弦和正弦信号的权重系数,可以得到基于LMS的自适应消谐算法如图2所示。
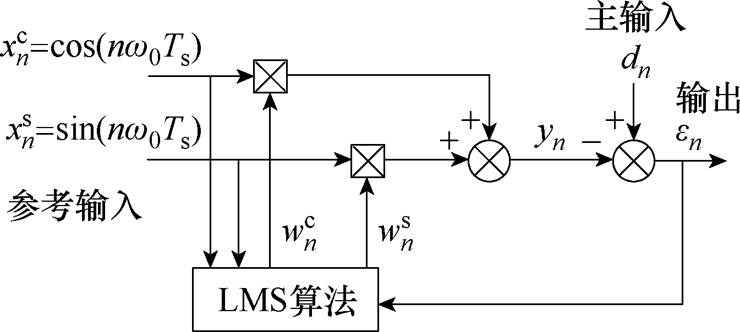
图2 基于LMS 的自适应消谐算法结构
Fig.2 Structure diagram of AHE based on LMS
图2中, 和
和 分别为具有两个正交分量余弦和正弦的参考信号;
分别为具有两个正交分量余弦和正弦的参考信号; 和
和 分别为参考信号余弦和正弦分量的权重系数;
分别为参考信号余弦和正弦分量的权重系数; 为主输入;
为主输入; 为应从主输入信号中消除的信号;
为应从主输入信号中消除的信号; 为输出信号;
为输出信号; 为离散时间系数;
为离散时间系数; 为主输入信号中需要消除的谐波频率,
为主输入信号中需要消除的谐波频率, 。
。
根据图2所示,估计误差可以表示为
 (10)
(10)
参考向量和权重向量定义为
 (11)
(11)
 (12)
(12)
将 用作
用作 的估计,那么在每个迭代过程中,梯度估计可以表示为
的估计,那么在每个迭代过程中,梯度估计可以表示为
 (13)
(13)
式中, 、
、 分别为余弦和正弦分量的权重系数。
分别为余弦和正弦分量的权重系数。
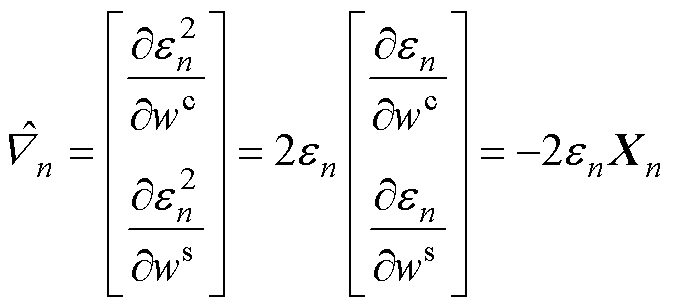
根据式(13)中估计的梯度,可使用最速下降算法进行权重自适应计算,LMS算法的目标是不断更新和调整权重系数和,有
 (14)
(14)
式中, 为自适应增益常数,用于调节适应的速度和稳定性。自适应增益常数的取值范围[17]为
为自适应增益常数,用于调节适应的速度和稳定性。自适应增益常数的取值范围[17]为
 (15)
(15)
通常,是一个小的正数,在本文中,的值在0.01~0.8的范围内。
根据式(14),可以得到LMS算法框图如图3所示。图3中,LMS算法的输出为余弦和正弦信号的权重系数和。
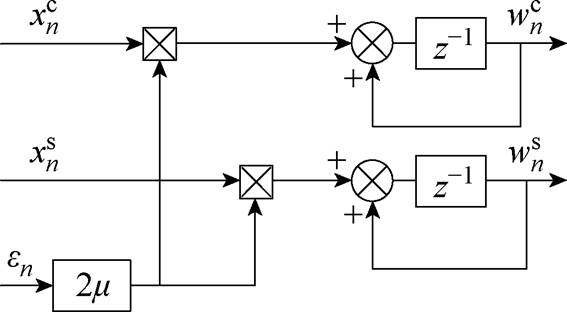
图3 LMS算法框图
Fig.3 Structure diagram of LMS
自适应算法的固有特性致使AHE的适应过程较为缓慢,但这不会干扰系统的动态,也不会改变系统相关控制的传递函数,同时AHE 要消除的谐波成分远高于常规控制的带宽。常规控制系统与AHE之间不存在相互作用,可以单独分析AHE与控制系统[23]。于是得到与控制系统相结合的AHE算法如图4所示,图中, 为同步电角速度;
为同步电角速度; 为磁链调节器输出电压;
为磁链调节器输出电压; 为转矩调节器输出电压;
为转矩调节器输出电压; 为定子M轴电流;
为定子M轴电流; 为定子M轴电压;
为定子M轴电压; 为定子T轴电压;
为定子T轴电压; 为需要消除的磁链谐波电压分量;
为需要消除的磁链谐波电压分量; 为需要消除的转矩谐波电压分量;
为需要消除的转矩谐波电压分量; 为磁链谐波电压分量;
为磁链谐波电压分量; 为转矩谐波电压分量。
为转矩谐波电压分量。
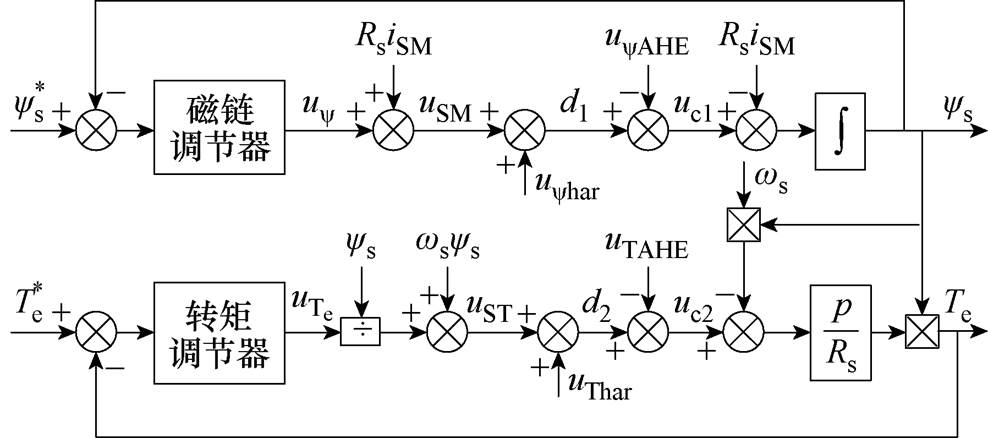
图4 AHE与系统控制对象的集成框图
Fig.4 Block diagram of AHE integration with the system control object
根据图4所示,磁链控制环中的控制输出d1由控制输入uc1与需要消除的磁链谐波分量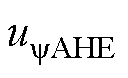 组成,转矩控制环中的控制输出d2由控制输入uc2与需要消除的转矩谐波分量组成。
组成,转矩控制环中的控制输出d2由控制输入uc2与需要消除的转矩谐波分量组成。
由于可以单独分析AHE与控制系统,因此对图4进行简化得到图5。
图5 AHE与系统控制对象的结构框图
Fig.5 Block diagram of the structure of AHE and control system object
根据异步电机磁链和转矩控制环可以得到
 (16)
(16)
 (17)
(17)
式中,K为比例系数。
AHE方法不会改变系统和相关控制的传递函数,可以将权重系数和视为常数,并得到AHE 输出信号中的系统传递函数为
 (18)
(18)
 充当控制器中正弦和余弦输入的线性运算算子,可将其视为参考输入的正弦和余弦函数的线性组合。图6展示了结合系统逆传递函数得出的AHE框图。
充当控制器中正弦和余弦输入的线性运算算子,可将其视为参考输入的正弦和余弦函数的线性组合。图6展示了结合系统逆传递函数得出的AHE框图。
消除多次谐波可以通过添加5次和7次等AHE模块来完成,其他阶次模块具有相同的误差输入,参考信号的频率等于要消除的谐波分量,同时将控制系统输出添加到谐波消除模块的输出中。
多次自适应谐波消除(Multiple Frequency AHE, MF-AHE)控制方法如图7所示,将图中第一个模块经过基波滤除后的输出,引入需要消除谐波阶次的模块中,得到需要消除的所有谐波电压值,并将其加入系统传递函数中,实现多次谐波的消除。
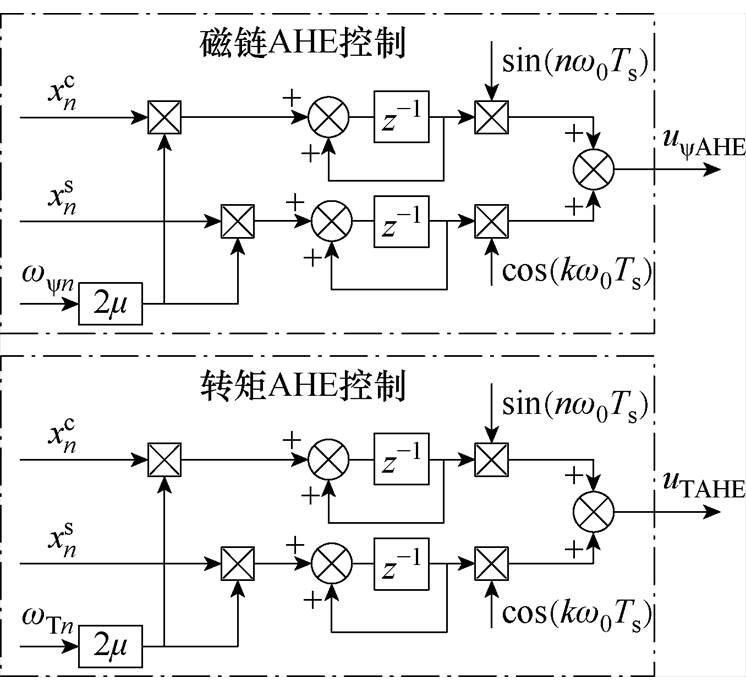
图6 包含系统逆传递函数的AHE算法框图
Fig.6 Block diagram of the AHE algorithm containing the inverse transfer function of the system
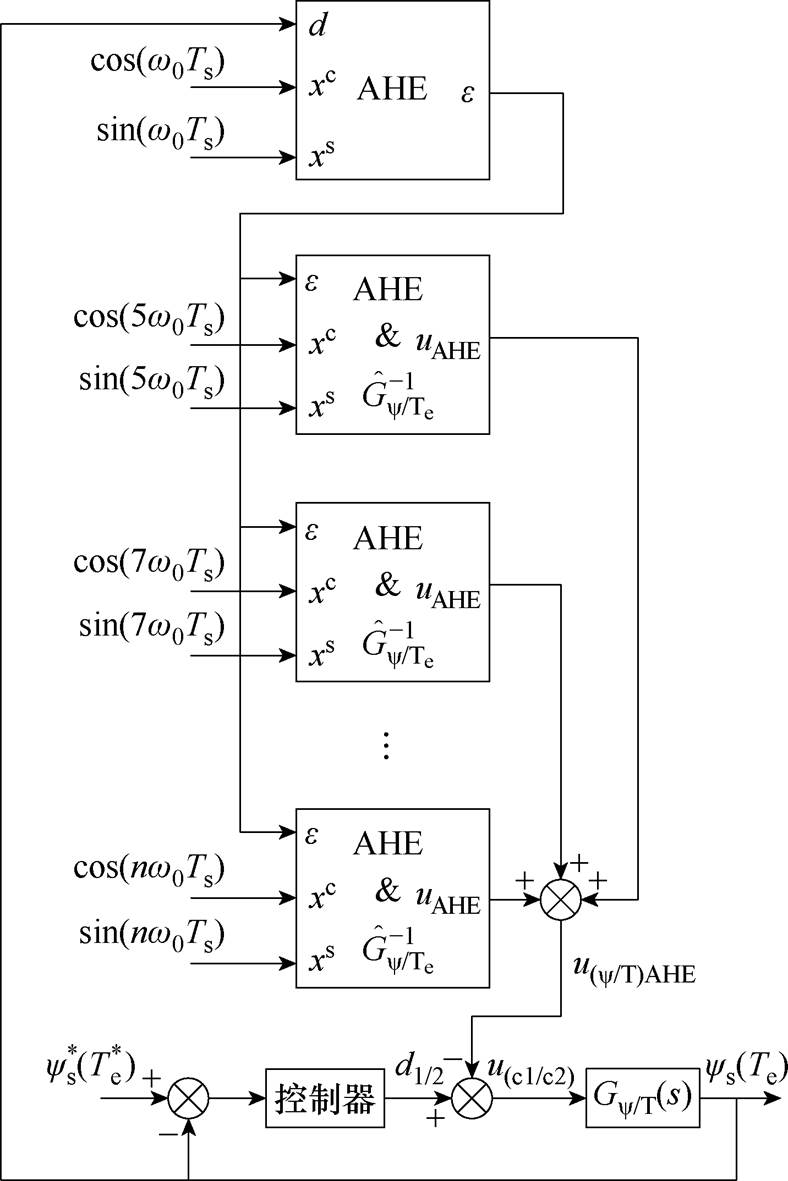
图7 多次AHE方法原理
Fig.7 Block diagram of the MF-AHE
为了改善AHE方法动态响应慢的问题,将AHE算法嵌入MPC中。交流电机输出电流经坐标变换后得到iM和iT,将需要消除频率的正弦和余弦分量引入MF-AHE中,得到5~25次谐波电压,与模型预测直接转矩控制中目标函数生成的最优MT轴电压共同产生空间矢量PWM(Space Vector PWM, SVPWM)参考电压矢量,参与系统控制,得到控制框图如图8所示。
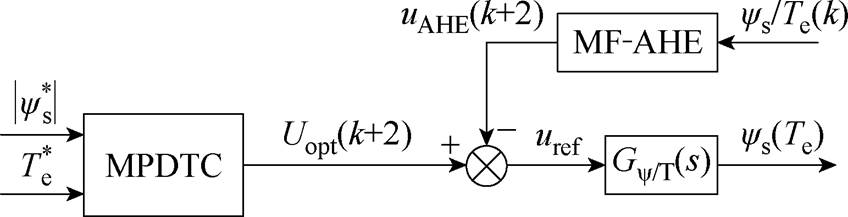
图8 多次AHE-MPC框图
Fig.8 Control block diagram of AHE-MPC
将式(14)改写为
 (19)
(19)
其中

根据式(16)~式(18)得到AHE-MPDTC策略中需要消除的谐波电压分量为
 (20)
(20)
 (21)
(21)
其中
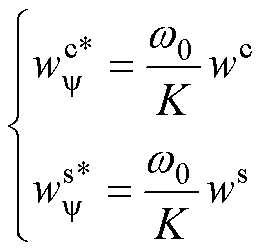
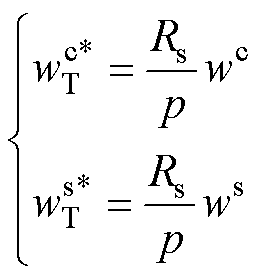
图9展示了AHE-MPDTC方法的总体控制框图。模型预测直接转矩控制部分由一个转速外环调节器和一个非线性模型预测内环控制器构成一个完整的异步电机控制回路,转矩的参考值由速度外环PI调节器得到,磁链参考值设定为定值,通过定子电压和电流来计算电机在两相静止坐标系下的定子、转子磁链,作为模型预测控制器的输入量,计算出七种电压矢量作用下转矩和定子磁链的预测值,然后将预测值和参考值代入目标函数进行评估,从而获取预测控制最优的电压输出,与AHE产生需要消除的MT轴谐波电压共同生成SVPWM信号,对变频调速系统进行控制。
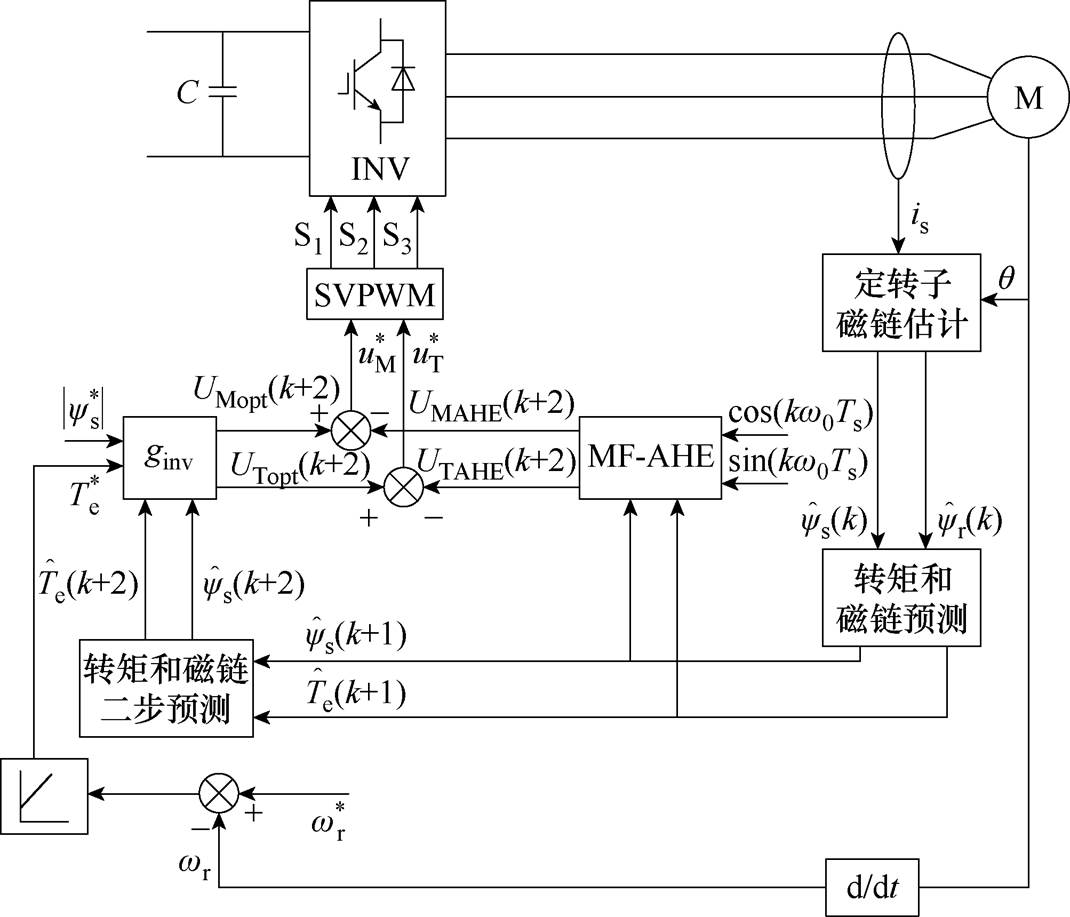
图9 AHE-MPDTC方法的总体控制框图
Fig.9 Total control block diagram of the AHE-MPDTC
为了验证AHE-MPDTC方法的有效性,建立异步电机MPDTC模型,实验参数见表1。将本文所提出的AHE-MPDTC策略分别与异步电机驱动系统的死区时间补偿策略[4]、基于谐波提取器的电流谐波抑制方法[19]、基于谐振数字滤波器的电机电磁转矩脉动抑制方法[14]进行对比研究。测试过程中,电机以5 N·m负载转矩起动,初始速度为750 r/min。在0.5 s,系统做转矩阶跃响应,突加负载转矩至20 N·m。在1 s时,系统做速度阶跃响应,参考值从750 r/min突变至1 000 r/min。
表1 变频系统参数
Tab.1 Inverter system parameters
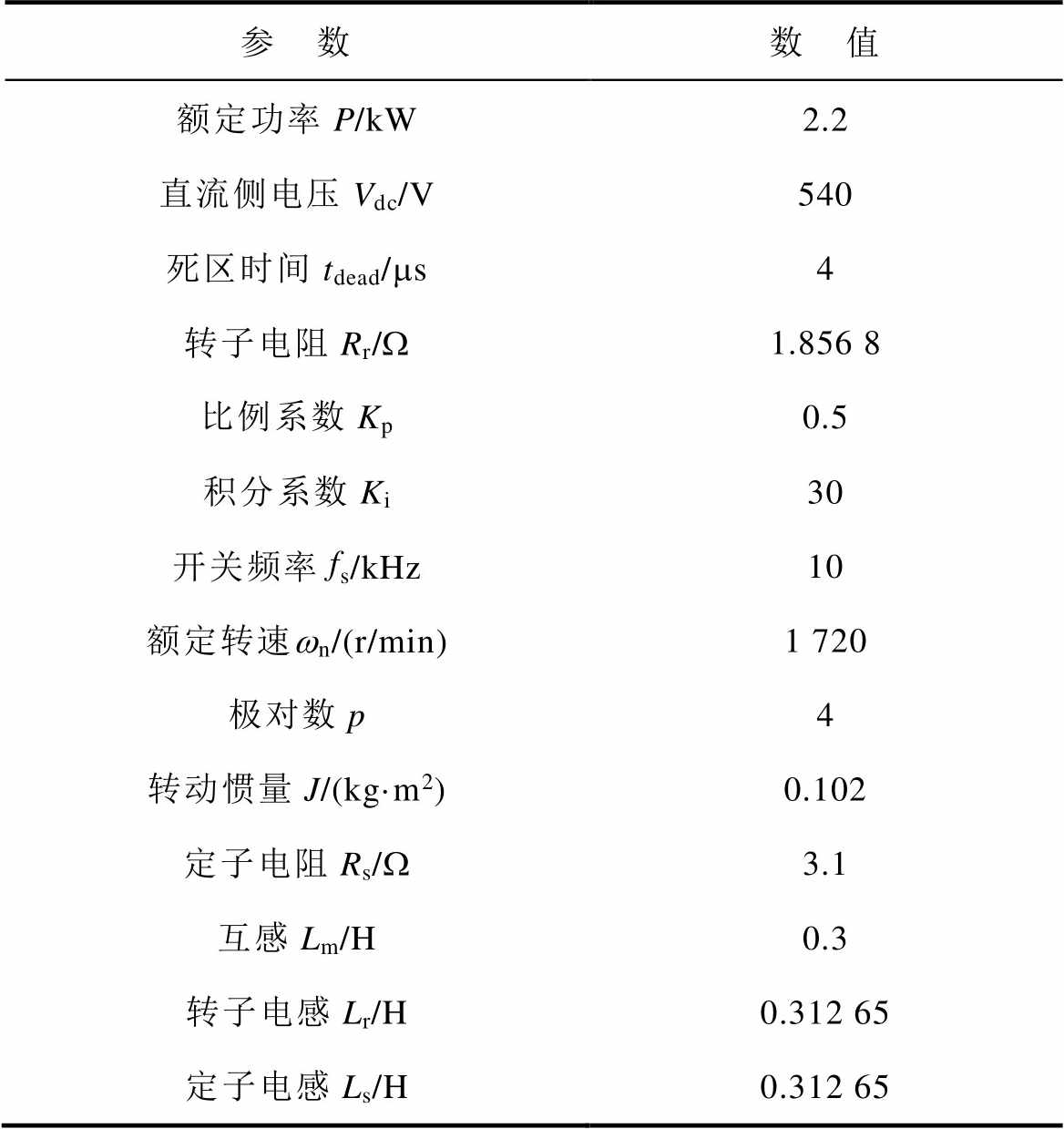
参 数数 值 额定功率P/kW2.2 直流侧电压Vdc/V540 死区时间tdead/ms4 转子电阻Rr/W1.856 8 比例系数Kp0.5 积分系数Ki30 开关频率fs/kHz10 额定转速wn/(r/min)1 720 极对数p4 转动惯量J/(kg·m2)0.102 定子电阻Rs/W3.1 互感Lm/H0.3 转子电感Lr/H0.312 65 定子电感Ls/H0.312 65
图10所示为在不同算法下输出电流的波形及其THD,并展示了在750 r/min转速下电机定子电流的快速傅里叶变换(Fast Fourier Transformation, FFT)分析频谱。从图中可以看出,本文提出的算法相较于死区时间补偿算法THD值下降了大约62.48%;相较于谐波提取算法THD值下降了约41.29%;较谐振数字滤波器方法THD值下降了约68.09%。
表2为不同算法下5~25次谐波值。根据表中的数据可以得出,死区效应补偿方法对于7~25次谐波的抑制效果优于谐振数字滤波器的抑制效果。谐波提取器策略相较本文所提出的方法在5次和7次谐波的抑制稍显不足,却在消除13~25次谐波的效果优于谐振数字滤波器方法。谐振数字滤波器对5次谐波的抑制效果较好于死区效应补偿方法,但总THD较高。本文提出的AHE-MPDTC方法能够显著减少电机定子电流中的5~25次谐波,相较于其他消除电机输出电流谐波方法,具有更好的效果。
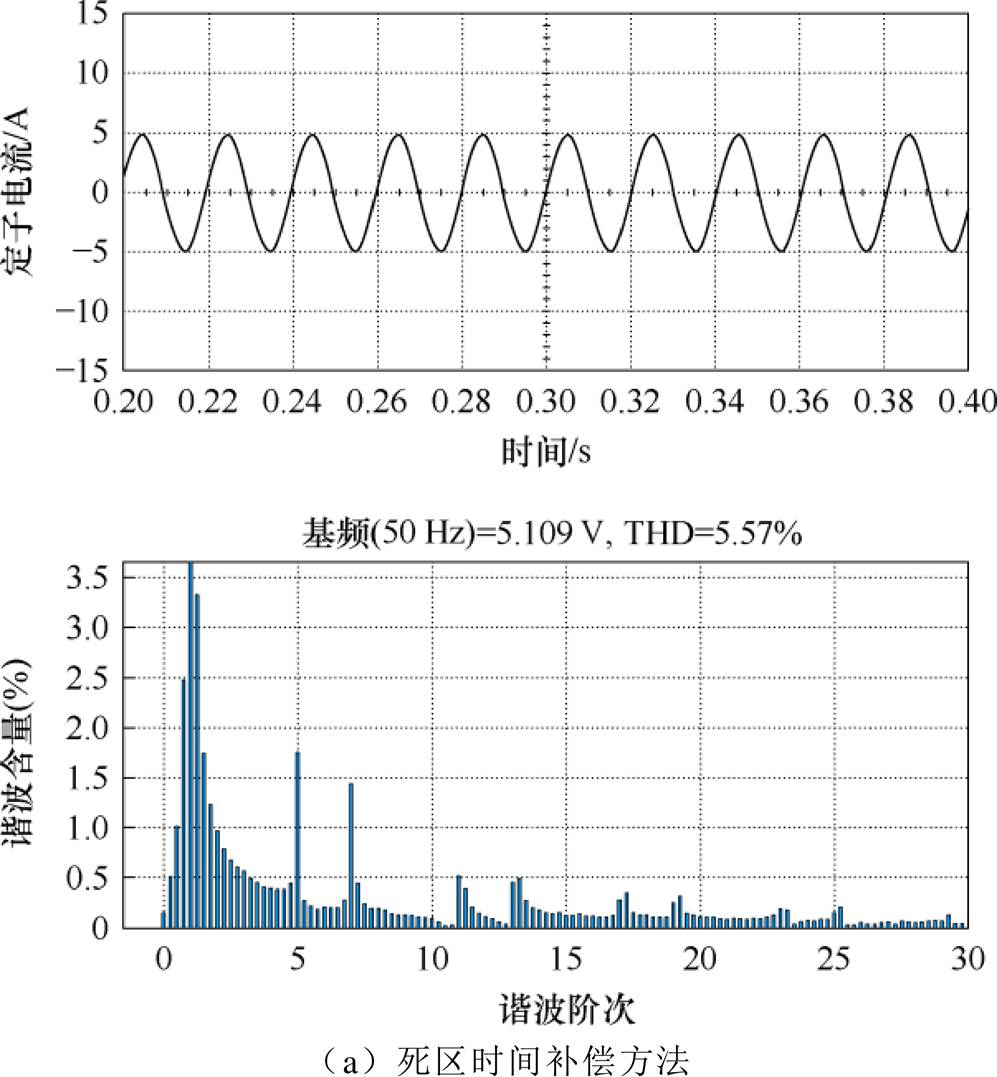

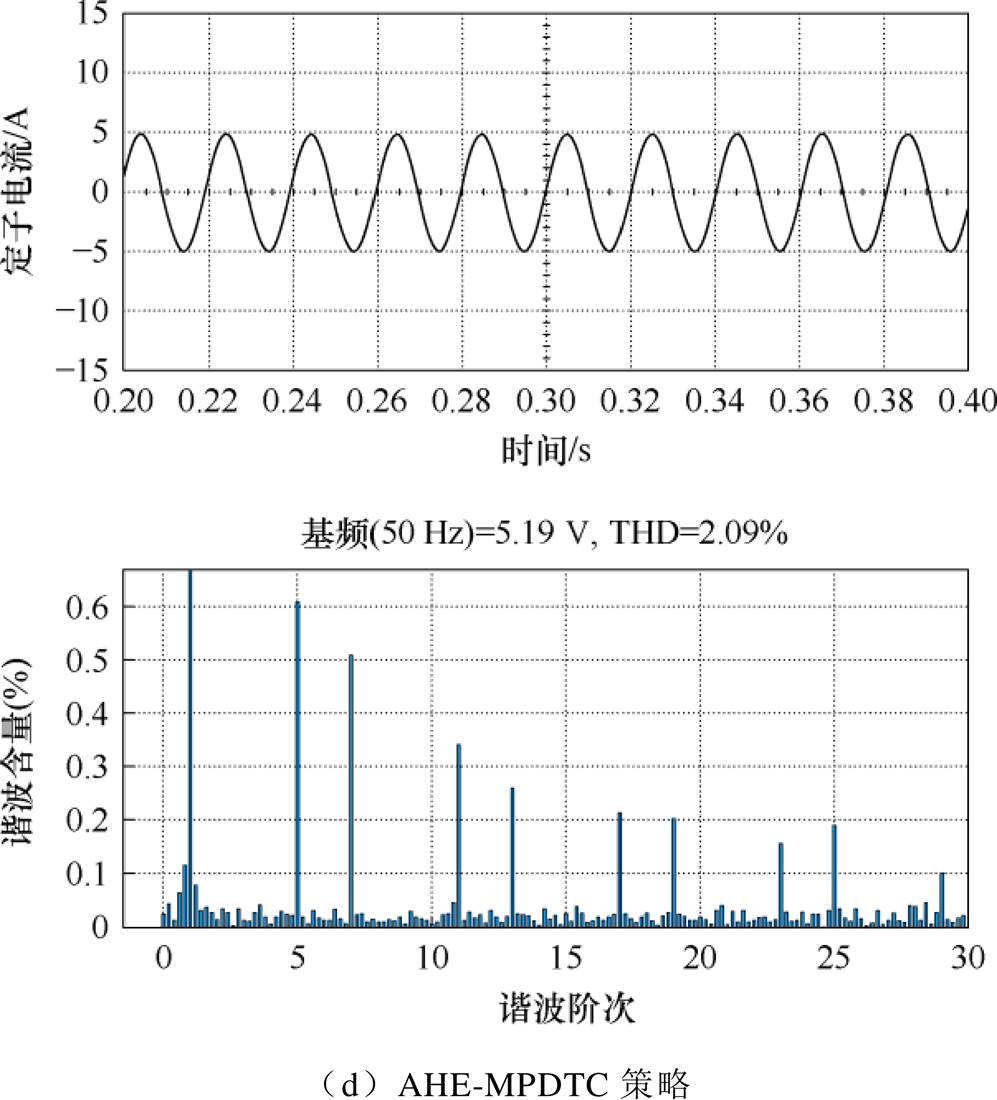
图10 电机输出电流波形及其THD
Fig.10 Motor output current waveforms and THD
为进一步测试AHE-MPDTC策略对异步电机输出转矩与磁链的影响,针对 MPDTC策略下,未采用AHE方法、死区时间补偿算法[4]、基于谐波提取器的电流谐波抑制方法[19]、基于谐振数字滤波器的电机电磁转矩脉动抑制策略[14]进行对比研究,实验结果如图11和图12所示。
图11中可以看出,电机运行在750 r/min,负载转矩由5 N·m加载到20 N·m工况下,无论是否加入AHE方法都没有改变异步电机驱动系统电磁转矩响应速度,当电机转速为1 000 r/min时,AHE- MPDTC较MPDTC电磁转矩脉动从2.7 N·m减少到0.4 N·m,转矩脉动下降约85.2%。
表2 不同算法5~25次谐波值比较
Tab.2 Comparison of 5th to 25th harmonic values on different algorithms (%)
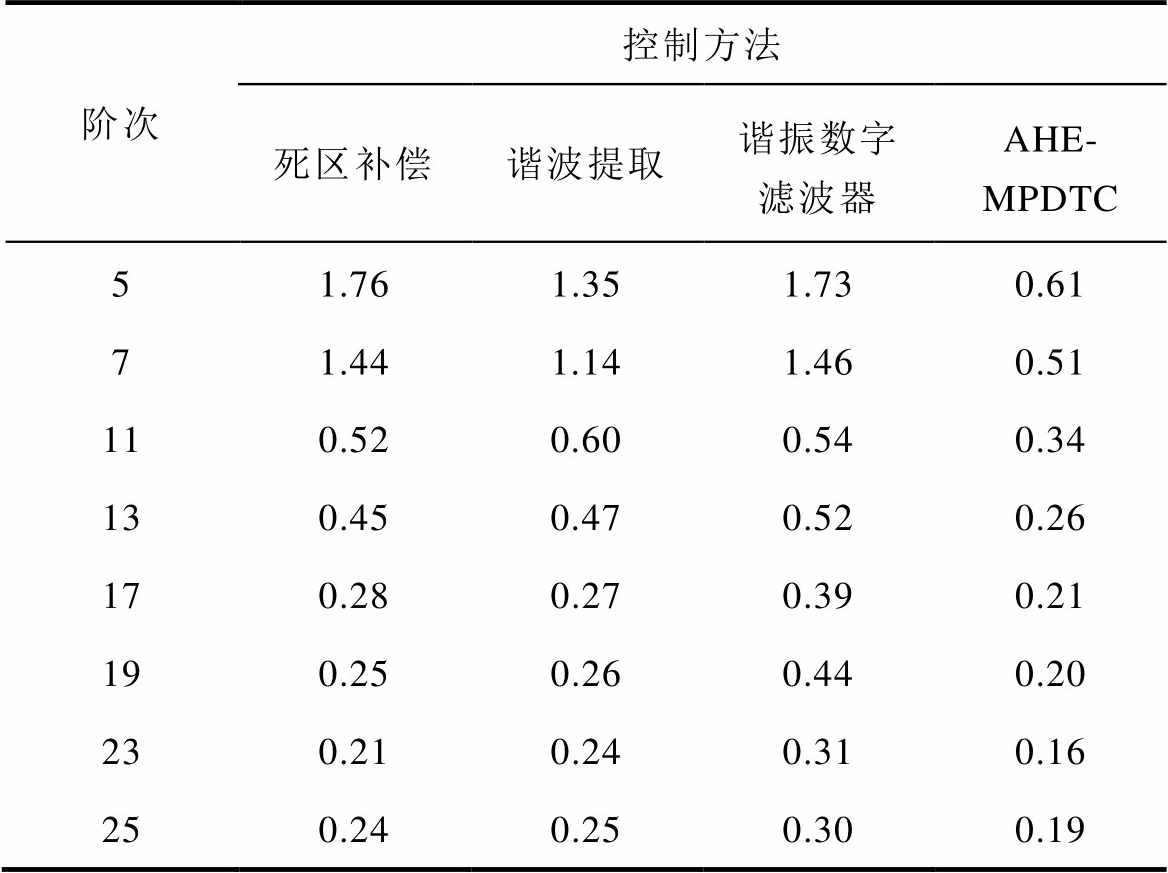
阶次控制方法 死区补偿谐波提取谐振数字滤波器AHE- MPDTC 51.761.351.730.61 71.441.141.460.51 110.520.600.540.34 130.450.470.520.26 170.280.270.390.21 190.250.260.440.20 230.210.240.310.16 250.240.250.300.19
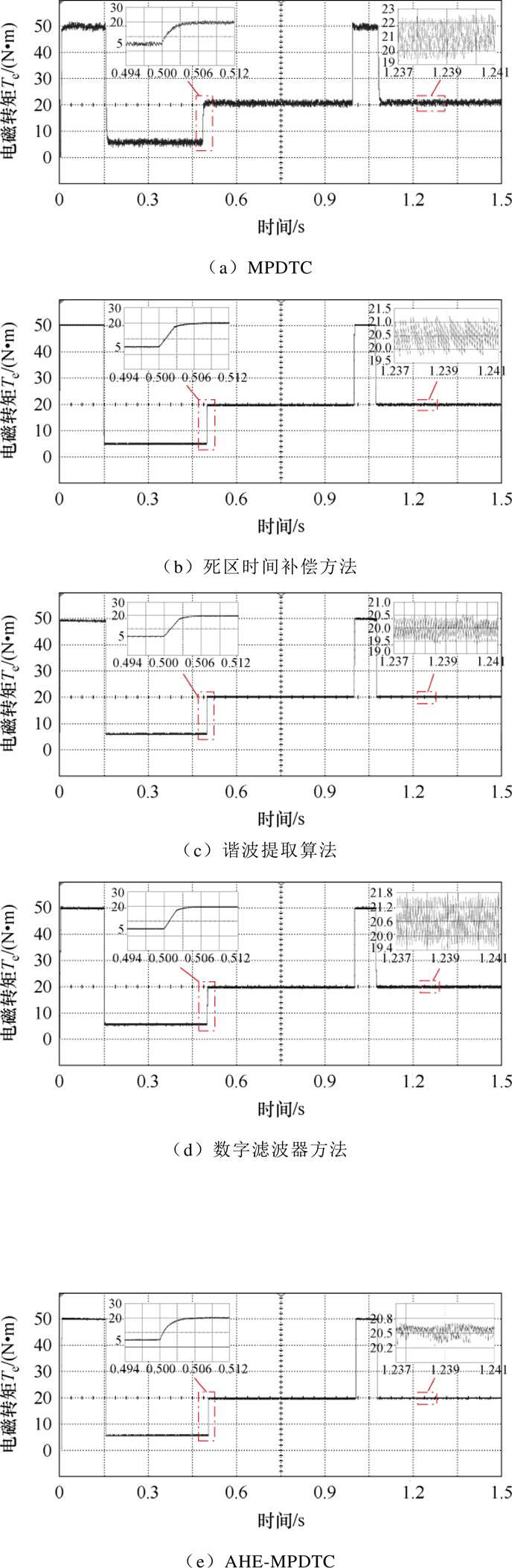
图11 电机输出转矩波形
Fig.11 Motor output torque waveforms
从图12中可以看出,电机运行在750 r/min,负载转矩在5 N·m工况下,无论是否加入AHE方法都没有改变异步电机驱动系统定子磁链响应速度,当电机转速为1 000 r/min,负载转矩为20 N·m时,AHE-MPDTC较MPDTC方法定子磁链脉动从0.1 V·s减小到0.04 V·s,定子磁链脉动降低约60%。
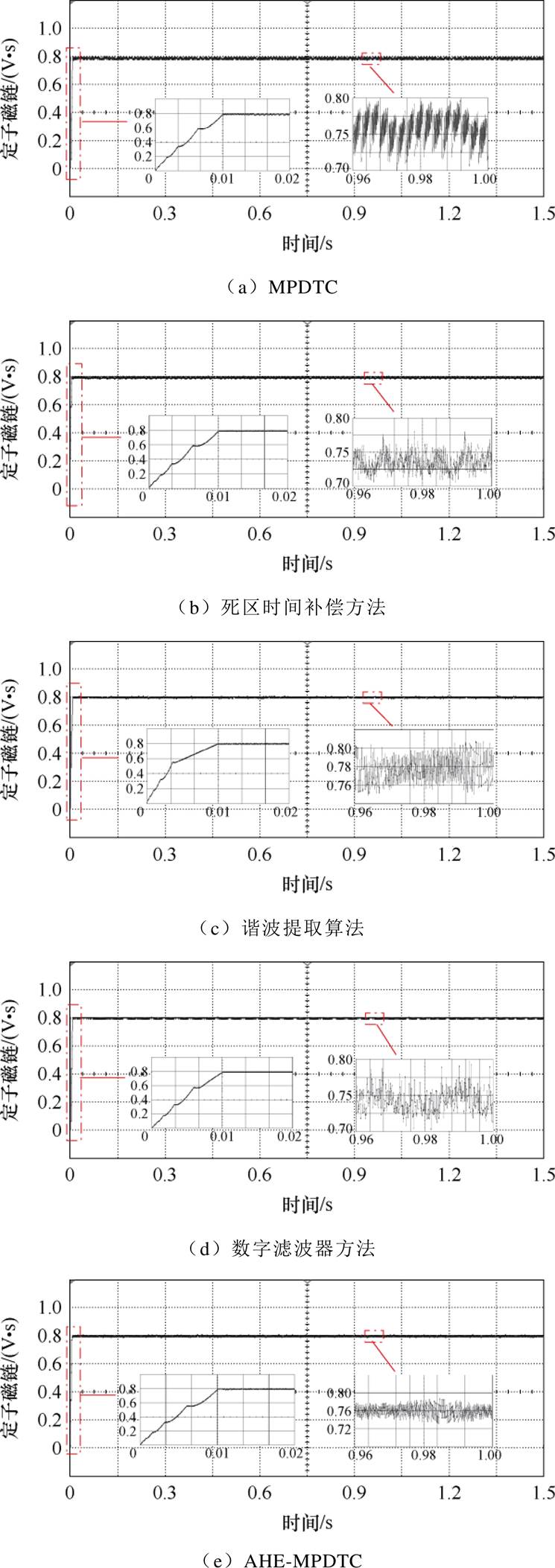
图12 异步电机定子磁链波形
Fig.12 Asynchronous motor stator chain waveforms
不同算法下异步电机输出转矩和定子磁链脉动对比分析数据见表3,从表中可以看出,本文提出的AHE-MPDTC策略较死区补偿方法在转矩和定子磁链脉动分别降低了1.4 N·m和0.03 V·s;较谐波提取算法在转矩和定子磁链脉动分别降低了0.6 N·m和0.015 V·s;较谐振数字滤波在转矩和定子磁链脉动分别降低了1.8 N·m和0.04 V·s。由图11、图12可以看出,经过AHE方法后的电机电磁转矩和定子磁链具有较小的振荡,同时,AHE方法的加入没有改变系统的响应速度,表明AHE-MPDTC策略在保证动态性能的基础上,使系统的波动得到改善。
表3 不同算法的性能比较
Tab.3 Performance comparison of different algorithms
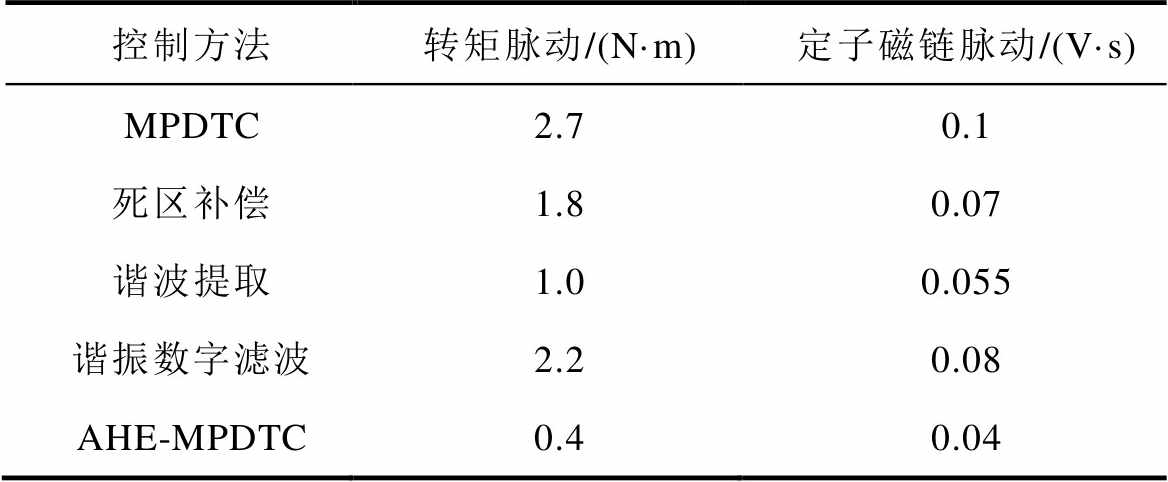
控制方法转矩脉动/(N·m)定子磁链脉动/(V·s) MPDTC2.70.1 死区补偿1.80.07 谐波提取1.00.055 谐振数字滤波2.20.08 AHE-MPDTC0.40.04
本文以异步电机变频驱动系统为研究对象,针对异步电机输出定子电流含有高次谐波的问题,提出一种基于模型预测直接转矩控制的自适应谐波消除方法。通过AHE产生需要消除的MT轴谐波电压与MPDTC目标函数产生的最优电压共同生成SVPWM信号,对变频调速系统进行控制。试验结果表明,所提策略不仅能够改善异步电机输出电流质量,还在一定程度上起到降低异步电机输出转矩和磁链脉动的作用,使异步电机变频调速系统具有较高的稳定性。同时与三种谐波电流消除方法进行对比分析,可以看出AHE-MPDTC可以更好地消除5~25次谐波。
参考文献
[1] 杨凯, 李孺涵, 罗成, 等. 考虑参数误差的无速度传感器异步电机低速发电工况稳定性提升策略[J]. 电工技术学报, 2023, 38(21): 5738-5748, 5820.
Yang Kai, Li Ruhan, Luo Cheng, et al. Enhanced stability for speed-sensorless induction motor drives in low-speed regenerating region considering para- meter uncertainties[J]. Transactions of China Elec- trotechnical Society, 2023, 38(21): 5738-5748, 5820.
[2] 冯婉, 张文娟, 苗轶如, 等. 基于dq坐标系下6次谐波抑制的车用感应电机低频共振削弱方法[J]. 电工技术学报, 2023, 38(24): 6632-6645.
Feng Wan, Zhang Wenjuan, Miao Yiru, et al. Low frequency resonance reduction method of induction motor used by electric vehicle based on sixth harmonic suppression in dq coordinate[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(24): 6632-6645.
[3] Kovács G. Harmonics in the squirrel cage induction motor analytic calculation part III: influence on the torque-speed characteristic[J]. CES Transactions on Electrical Machines and Systems, 2024, 8(1): 86-102.
[4] 焦宁, 刘天琪, 王顺亮, 等. 三相两电平逆变器死区效应谐波分析及其补偿方法研究[J]. 电网技术, 2020, 44(6): 2169-2176.
Jiao Ning, Liu Tianqi, Wang Shunliang, et al. Harmonic analysis and compensation method for dead-time effects in three-phase two-level inverters[J]. Power System Technology, 2020, 44(6): 2169-2176.
[5] 张志刚, 李腾, 杜劭琨, 等. 基于死区补偿的PMSM转矩脉动抑制研究[J]. 控制工程, 2021, 28(6): 1108-1114.
Zhang Zhigang, Li Teng, Du Shaokun, et al. Research on torque ripple suppression of PMSM based on dead-time compensation[J]. Control Engineering of China, 2021, 28(6): 1108-1114.
[6] 宁继超, 贲洪奇, 王雪松, 等. 带有死区时间补偿及电容电压平衡功能的二极管钳位型三电平逆变器数字调制方法[J]. 电工技术学报, 2024, 39(20): 6444-6461.
Ning Jichao, Ben Hongqi, Wang Xuesong, et al. A digital modulation method for dead-time com- pensation and capacitor voltage balance in diode clamped three-level inverters[J]. Transactions of China Electrotechnical Society, 2024, 39(20): 6444- 6461.
[7] 周国祥, 王邦继, 王梦轩, 等. 高频伺服系统逆变器死区非线性补偿策略[J/OL]. 电工技术学报, https://doi.org/10.19595/j.cnki.1000-6753.tces.240687.
Zhou Guoxiang, Wang Bangji, Wang Mengxuan, et al. Dead-time nonlinearity compensation strategy for inverter in high frequency servo systems[J/OL]. Transactions of China Electrotechnical Society, https://doi.org/10.19595/j.cnki.1000-6753.tces.240687.
[8] Boby M, Arun Rahul S, Gopakumar K, et al. A low-order harmonic elimination scheme for induction motor drives using a multilevel octadecagonal space vector structure with a single DC source[J]. IEEE Transactions on Power Electronics, 2018, 33(3): 2430-2437.
[9] Zhang Jing, Wang Bo, Yu Yong, et al. Over- modulation harmonic modeling and suppression for induction motor field-weakening control with extended voltage tracking method[J]. IEEE Transa- ctions on Industrial Electronics, 2023, 70(6): 5637- 5650.
[10] Çelik D, Ahmed H, Meral M E. Kalman filter-based super-twisting sliding mode control of shunt active power filter for electric vehicle charging station applications[J]. IEEE Transactions on Power Delivery, 2023, 38(2): 1097-1107.
[11] Hasan K, Othman M M, Meraj S T, et al. Shunt active power filter based on savitzky-golay filter: pragmatic modelling and performance validation[J]. IEEE Transactions on Power Electronics, 2023, 38(7): 8838-8850.
[12] 陈少龙, 张兴, 郭梓暄, 等. 基于自适应虚拟阻抗的并网电流谐波抑制[J]. 电力电子技术, 2022, 56(2): 76-79.
Chen Shaolong, Zhang Xing, Guo Zixuan, et al. Harmonic suppression of grid-connected current based on adaptive virtual impedance[J]. Power Elec- tronics, 2022, 56(2): 76-79.
[13] Jayaraman K, Kumar M. Design of passive common- mode attenuation methods for inverter-fed induction motor drive with reduced common-mode voltage PWM technique[J]. IEEE Transactions on Power Electronics, 2020, 35(3): 2861-2870.
[14] 张海洋, 许海平, 方程, 等. 基于谐振数字滤波器的直驱式永磁同步电机转矩脉动抑制方法[J]. 中国电机工程学报, 2018, 38(4): 1222-1231, 1299.
Zhang Haiyang, Xu Haiping, Fang Cheng, et al. Torque ripple suppression method of direct-drive permanent magnet synchronous motor based on resonant digital filter[J]. Proceedings of the CSEE, 2018, 38(4): 1222-1231, 1299.
[15] 朱元, 朱醴亭, 肖明康, 等. 基于几何约束优化的重复控制器及PMSM电流谐波抑制应用[J]. 电工技术学报, 2024, 39(4): 1059-1073.
Zhu Yuan, Zhu Liting, Xiao Mingkang, et al. Repetitive controller based on geometric constraint optimization and its application to current harmonic suppression of PMSM[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 1059-1073.
[16] Zhao Fangzhou, Xiao Guochun, Zhu Tianhua, et al. Harmonic analysis and suppression method of output current distortion for medium-voltage motor drives with modular multilevel converter[J]. IEEE Transa- ctions on Power Electronics, 2020, 35(1): 744-759.
[17] Wang Lu, Zhu Z Q, Bin Hong, et al. Current harmonics suppression strategy for PMSM with nonsinusoidal back-EMF based on adaptive linear neuron method[J]. IEEE Transactions on Industrial Electronics, 2020, 67(11): 9164-9173.
[18] Ali Qasem Mohammed S, Hakami S S, Lee K B. Improved iterative learning control for three-level NPC inverter-fed PMSM drives with DC-link balancing[J]. IEEE Transactions on Industrial Infor- matics, 2024, 20(8): 10554-10564.
[19] 金石, 朱熙, 金无痕, 等. 基于谐波提取器的永磁同步电机谐波抑制方法[J]. 电气工程学报, 2021, 16(1): 9-15.
Jin Shi, Zhu Xi, Jin Wuhen, et al. Harmonic suppression method of permanent magnet syn- chronous motor based on harmonic extractor[J]. Journal of Electrical Engineering, 2021, 16(1): 9-15.
[20] 宋健, 宋文祥, 张钦清. 直流母线小电容永磁同步电机驱动系统网侧电流谐波抑制策略[J]. 电工技术学报, 2024, 39(18): 5668-5679.
Song Jian, Song Wenxiang, Zhang Qinqing. Harmonic suppression strategy of grid side current for DC-link small capacitor permanent magnet synchronous motor drive system[J]. Transactions of China Electro- technical Society, 2024, 39(18): 5668-5679.
[21] 王晓寰, 庆宏阳, 刘聪哲, 等. 微电网孤岛运行模式下谐波电流抑制研究[J]. 太阳能学报, 2020, 41(3): 167-176.
Wang Xiaohuan, Qing Hongyang, Liu Congzhe, et al. Research on harmonic current suppression in islanded mode of microgrid[J]. Acta Energiae Solaris Sinica, 2020, 41(3): 167-176.
[22] Zhang Zhaoyang, Ge Xinglai, Tian Zisi, et al. A PWM for minimum current harmonic distortion in metro traction PMSM with saliency ratio and load angle constrains[J]. IEEE Transactions on Power Elec- tronics, 2018, 33(5): 4498-4511.
[23] Astrom K J, Wittenmark B. Adaptive control[M]. 2nd ed. Mineol: Courier Dover Publications, 2008.
Abstract With the rapid development of the economy and society, three-phase induction motors are widely used in aerospace, steel, electric power, and various industrial sectors due to their simple design, reliable performance, and cost-effectiveness. However, the operation of the asynchronous motor frequency drive system can generate harmonics, causing issues such as torque pulsation in generators, increased losses, and other challenges. These factors directly impact the efficiency and performance of the motor, sometimes resulting in failures in production processes or electromechanical systems. This paper proposes a model predictive direct torque control (AHE-MPDTC) method with an adaptive harmonic elimination strategy to ensure the system response speed based on the effective elimination of the 5th to 25th harmonics.
Firstly, a least mean square (LMS) adaptive algorithm is used to estimate the harmonic interference components while updating the weighting coefficients of cosine and sinusoidal signals online. Secondly, the adaptive algorithm is applied to the model predictive direct torque control (MPDTC) method to obtain the magnetic chain harmonic components and torque harmonic components to be filtered. Thirdly, multiple harmonics are eliminated by adding a single module, and the control system output is added to the output of the harmonic elimination module. All the harmonic voltage values that need to be eliminated are obtained and added to the system transfer function. Finally, the multiple AHE algorithm is embedded into the MPC, and the output current of the AC motor is transformed to obtain the MT axis. The sinusoidal and co-sinusoidal components of the frequencies that need to be eliminated are introduced into the MF_AHE and the 5th to 25th harmonic voltages are obtained. In addition, the optimal MT axis voltages in the model-predicted direct torque control generate the space vector pulse width modulation (SVPWM) reference voltage vector.
The experimental results verify the AHE-MPDTC method and the following conclusions can be drawn. (1) The dead time compensation strategy of the asynchronous motor drive system, the current harmonic suppression method of the harmonic extractor, and the electromagnetic torque pulsation suppression method of the motor with resonance digital filter are studied. The output stator current of the motor has a much lower THD under the AHE-MPDTC method. (2) Comparison between the AHE-MPDTC and MPDTC methods demonstrates that adding the AHE method does not affect the response speed of the motor's electromagnetic torque and stator magnetic chain. Additionally, the AHE-MPDTC strategy achieves a remarkable reduction of approximately 85.2% in motor torque pulsation and 60.0% in stator magnetic chain pulsation compared to the MPDTC strategy. (3) The AHE method does not compromise the system's response speed, and the AHE-MPDTC strategy improves system stability while maintaining excellent dynamic performance.
keywords:Asynchronous motor, variable frequency drives, model predictive control (MPC), adaptive harmonic elimination (AHE)
DOI: 10.19595/j.cnki.1000-6753.tces.240165
中图分类号:TM343
国家自然科学基金资助项目(U21A20483)。
收稿日期 2024-01-24
改稿日期 2024-06-03
韩 硕 女,1993年生,博士研究生,研究方向为交流调速控制理论与电力电子应用。E-mail: B20190514@xs.ustb.edu.cn
张勇军 男,1973年生,研究员,博士生导师,研究方向为先进控制理论研究、电力电子技术与智能控制。E-mail: zhangyj@ustb.edu.cn(通信作者)
(编辑 崔文静)