 串联暂态电抗
串联暂态电抗 ,并通过外部线路(电阻RL、电抗XL)连接于无穷大母线,其中,
,并通过外部线路(电阻RL、电抗XL)连接于无穷大母线,其中, 为定子电压,
为定子电压, 为定子电流,
为定子电流, 为线路电流。并网同步发电机具有“天然”自同步特性,这主要由反映暂态电动势相位(即功角
为线路电流。并网同步发电机具有“天然”自同步特性,这主要由反映暂态电动势相位(即功角 )与电磁功率Pe之间关系的转子运动方程所表征,有
)与电磁功率Pe之间关系的转子运动方程所表征,有摘要 在直接并网电压源型逆变器上广泛研究的自同步控制方法难以直接应用于双馈风机,其主要原因是受控的转子侧逆变器电压与并网的定子暂态电动势是通过转子励磁绕组动态耦合的。因此,该文提出一种基于暂态电动势控制的双馈风机鲁棒自同步控制策略。通过转子侧逆变器电压控制暂态电动势,所提自同步控制策略可有效计及风机机械和励磁动态,避免其对闭环控制系统稳定性的不良影响。此外,针对所提自同步控制中的PI参数,该文进一步提出了鲁棒PI参数设计方法,以应对由于风机参数不确定性带来的闭环系统稳定性问题。仿真结果验证了双馈风机在该文所提自同步控制策略下可以有效地向电网提供支撑。同时,仿真结果表明,具有鲁棒PI参数的自同步控制对风机参数的不确定性具有更强的免疫能力,从而提升了双馈风机自同步闭环控制系统在不确定性参数环境下的稳定性。
关键词:跟网型 构网型 自同步 双馈风机 鲁棒控制 暂态电动势
并网新能源发电设备或储能装置的变流器控制策略一般可分为跟网型(Grid-Following, GFL)和构网型(Grid-Forming, GFM)两大类[1]。当前,实际中并网变流器均采用跟网型控制策略[2],与电网保持同步需要依靠锁相环(Phase-Locked Loop, PLL)[3]。然而,在弱电气联系的电网中,并网点较低的短路比会导致跟网型变流器PLL的负阻尼效应显著,并网系统趋向于不稳定[4-7]。因此,无需PLL且具有自同步能力的构网型变流器控制正成为学术界关注的焦点[8]。已有研究工作均从理论上证明了其对弱交流电网的同步支撑能力,在未来“沙戈荒”和“深远海”等重要新能源开发环境中具有较大的应用前景[9-10]。
目前,学术界已提出多种针对直接并网的电压源型变流器(Voltage Source Converter, VSC)的构网型控制策略,其中虚拟同步控制研究探讨较 多[11]。虚拟同步机(Virtual Synchronous Generator, VSG)控制策略是指通过VSC控制系统模仿传统同步发电机的转子运动方程和励磁系统动态方程,使并网VSC获得同步发电机(有功-频率和无功-电压)外特性的一种控制策略[12]。文献[13-16]构建了虚拟同步机线性化模型,并且兼顾了响应特性与系统阻尼的需求,提出了VSG参数优化措施。文献[17-18]提出了双馈风电机组的虚拟同步非线性联轴控制方法,可有效拓展风机抑振带宽,提升其抑制功率振荡和频率变化等并网主动支撑性能。此外,作为经VSC直接并网的典型代表,基于虚拟同步控制的直驱风机应用研究也较多。文献[19]基于虚拟同步机技术设计了一种直驱风机高、低电压连续故障穿越策略,可持续性强且能承受连续故障电压冲击,提高了机组在恶劣工况下的并网生存能力。文献[20]采用特征模态分析方法对比了电流源型/电压源型直驱风机的并网稳定性,研究发现加入基于虚拟同步控制的电压源型直驱风机可以提高原有电流源型直驱风场在弱电网下的稳定性。
双馈异步风力发电机(Doubly-Fed Induction Generator, DFIG)由于其高度灵活可控性而在风力发电领域占有重要地位[21]。事实上,双馈风机的网侧变流器(Grid-Side Converter, GSC)是直接并网的,因此理论上可以将上述VSG技术单独应用于GSC[22-23]。然而,考虑到很难通过GSC对双馈风机总的有功功率输出进行直接控制,因此也无法建立双馈风机总的有功功率输出与GSC电动势之间如同步发电机的“有功功率-相位”关系。鉴于此,文献[24]在基于PLL的矢量解耦控制基础上对双馈风机转子侧变流器(Rotor-Side Converter, RSC)控制进行改造,使其具备响应电网频率变化的能力,这也意味着其无法摆脱PLL所固有的问题。此外,文献[25]基于阻尼转矩法和特征值分析法阐明了虚拟同步双馈风机对同步机低频振荡的影响机制;文献[26]将虚拟同步机技术应用到转子侧逆变器中,替换传统的矢量解耦控制;文献[27]提出了基于功率耦合的双馈风机同步控制策略;文献[28]提出了一种含多附加能量支路重塑的虚拟同步双馈风机次同步振荡控制策略;文献[29]设计了风储联合系统来进行黑启动研究,其中双馈风机采用了一种改进型虚拟同步控制策略;文献[30]提出了一种基于状态重构的构网型风机与储能系统联合频率支撑控制策略。实际上,文献[25-30]均在双馈风机RSC上实施自同步控制(VSG控制),通过风机输出有功功率不平衡量和虚拟转子运动方程来产生RSC电压的相位,而通过无功功率不平衡量和虚拟励磁系统动态方程来产生RSC电压的幅值。值得说明的是,RSC并非直接并网的,双馈风机的并网电动势(即暂态电动势)与RSC电压之间并无代数耦合关系,二者实际上是通过转子绕组励磁动态耦合的。这说明上述研究忽略了风机动态(包括转子机械动态和励磁绕组动态)对自同步控制的影响,理论上无法保证闭环系统的稳定性。
针对上述问题,本文提出了一种基于暂态电动势控制的双馈风机鲁棒自同步控制策略,其属于构网型控制策略,可以使双馈风机在保证闭环控制系统稳定性的前提下向电网提供同步支撑。首先,通过与传统同步发电机类比,提出了考虑双馈风机励磁系统动态的自同步控制策略框图,对RSC输出电压进行控制。其次,考虑到所提自同步控制策略需要使用风机暂态电抗参数间接获取暂态电抗的量测值,本文进一步提出自同步控制鲁棒PI参数设计方法,可以有效地解决该风机参数存在不确定性情况下闭环控制系统的稳定性问题。最后,在Matlab- Simulink平台上进行了仿真,结果证明了所提双馈风机自同步控制对电网的同步支撑效果。同时,通过对比鲁棒PI参数和普通PI参数的控制效果,验证了本文所提自同步控制鲁棒PI参数整定方法的有效性。
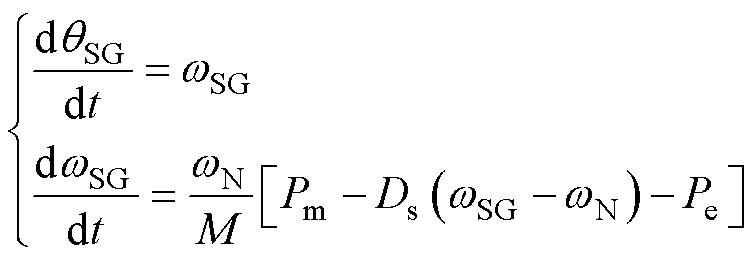
为便于理解本文所提的双馈风机自同步控制策略,本节将以传统同步发电机进行对比说明。如图1等效电路所示,同步发电机用经典模型表示,即暂态电动势串联暂态电抗,并通过外部线路(电阻RL、电抗XL)连接于无穷大母线,其中,为定子电压,为定子电流,为线路电流。并网同步发电机具有“天然”自同步特性,这主要由反映暂态电动势相位(即功角)与电磁功率Pe之间关系的转子运动方程所表征,有
 (1)
(1)
式中,Pm为同步发电机参考机械功率输入(pu);Ds为调速器下垂控制系数((pu)/(rad/s)),且忽略原动机和调速器的机械动态; 为同步发电机电角速度(rad/s);M为惯性时间常数(s);
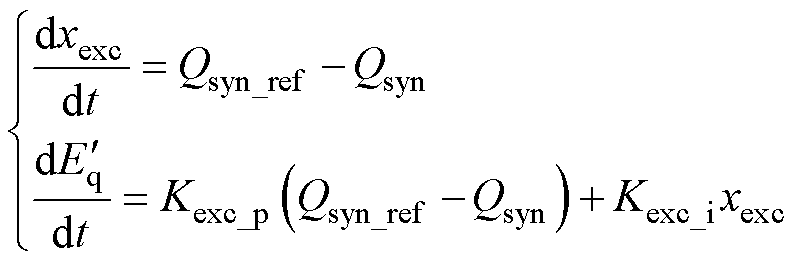
为同步发电机电角速度(rad/s);M为惯性时间常数(s); 为额定同步转速(rad/s)。如无特别说明,本文中变量或者参数均为标幺值。此外,为简化说明,本文假设同步发电机采用定输出无功功率策略。因此,同步发电机励磁系统可用简化微分方程描述为
为额定同步转速(rad/s)。如无特别说明,本文中变量或者参数均为标幺值。此外,为简化说明,本文假设同步发电机采用定输出无功功率策略。因此,同步发电机励磁系统可用简化微分方程描述为
 (2)
(2)
式中,Qsyn_ref和Qsyn分别为同步发电机定子输出无功功率指令值和实际值;Kexc_p和Kexc_i分别为近似描述励磁系统动态的PI环节的比例和积分系数;xexc为PI积分器的状态变量。

图1 同步发电机单机无穷大系统接线
Fig.1 Diagram of single machine connected to infinite bus
双馈风机示意图和定子绕组等效电路如图2所示。图中, 和
和 分别为双馈风机的暂态电动势和暂态电抗,由于定子绕组电阻很小故可以忽略,
分别为双馈风机的暂态电动势和暂态电抗,由于定子绕组电阻很小故可以忽略, 为RSC输出控制电压相量,ed、eq和urd、urq分别为和在某一dq坐标系下的d轴和q轴分量;
为RSC输出控制电压相量,ed、eq和urd、urq分别为和在某一dq坐标系下的d轴和q轴分量; 和
和 分别为双馈风机网侧的电压与电流;
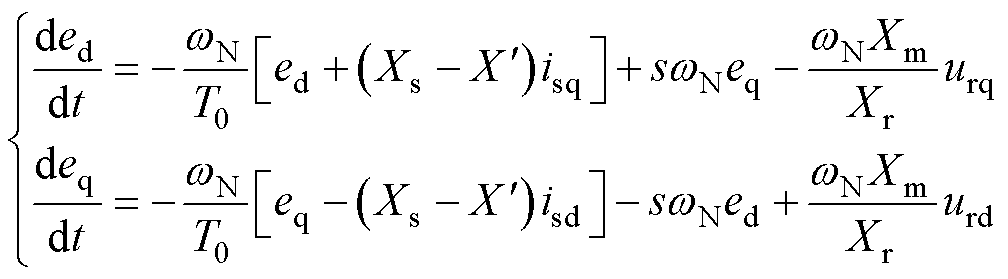
分别为双馈风机网侧的电压与电流; 为双馈风机转子侧电流。此外,RSC输出电压可以通过如下双馈风机转子绕组动态来影响的d轴和q轴分量(或者暂态电动势的幅值和相位),有
为双馈风机转子侧电流。此外,RSC输出电压可以通过如下双馈风机转子绕组动态来影响的d轴和q轴分量(或者暂态电动势的幅值和相位),有
 (3)
(3)
式中,Xs、Xr和Xm分别为双馈风机的定子绕组漏抗、转子绕组漏抗和励磁电抗;isd和isq分别为定子电流的d轴和q轴分量;s为转差率;T0为转子绕组开环时间常数。
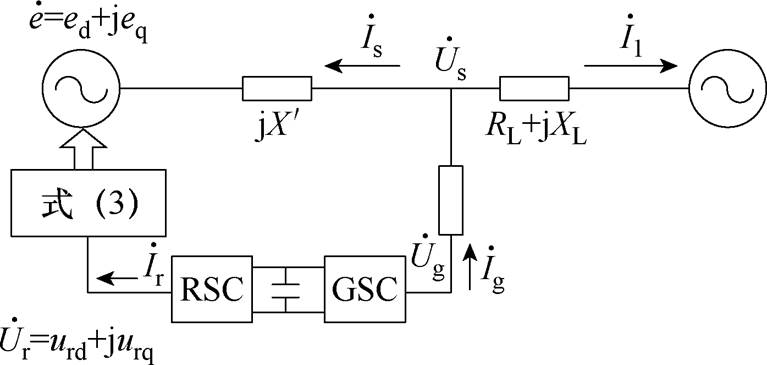
图2 双馈风机单机无穷大系统接线
Fig.2 Diagram of single DFIG connected to infinite bus
对比图1和图2的等效电路不难发现,双馈风机(定子侧)和同步发电机均通过暂态电动势并网,二者并无本质差别。因此,如果希望双馈风机表现出同步发电机的自同步特性,那就要求双馈风机的“暂态电动势相位-有功功率特性”和“暂态电动势幅值-无功功率特性”能分别模拟式(1)和式(2)。因为式(3)表明可以通过urd和urq分别控制eq和ed,因此本文所提双馈风机自同步控制传递函数框图如图3所示。图中,Ps、Q和Pr分别为双馈风机定子输出有功功率、无功功率和GSC输出有功功率,Pref为风机参考有功功率输出,Qref为定子参考无功功率输出,edref和eqref分别为暂态电动势d轴和q轴分量的参考值,H和D分别为双馈风机的虚拟惯性时间常数(s)和下垂控制系数((pu)/rad/s)。
图3a表明,通过urd可以将暂态电动势定位到d轴方向,因此代表dq坐标系空间位置的 (rad)可以用来表征的相位。不难发现,图3b类比式(1)产生q,即由虚拟的转子运动方程来生成暂态电动势的相位,其中
(rad)可以用来表征的相位。不难发现,图3b类比式(1)产生q,即由虚拟的转子运动方程来生成暂态电动势的相位,其中 为虚拟同步发电机转速,Ps+Pr为虚拟电磁功率,Pref为虚拟参考机械功率输入,DDw 为虚拟原动机下垂调节功率。图3c则类比式(2),通过urq调节幅值大小来控制双馈风机的定子无功功率输出。因此,类比同步发电机,图3可实现双馈风机的自同步控制。
为虚拟同步发电机转速,Ps+Pr为虚拟电磁功率,Pref为虚拟参考机械功率输入,DDw 为虚拟原动机下垂调节功率。图3c则类比式(2),通过urq调节幅值大小来控制双馈风机的定子无功功率输出。因此,类比同步发电机,图3可实现双馈风机的自同步控制。
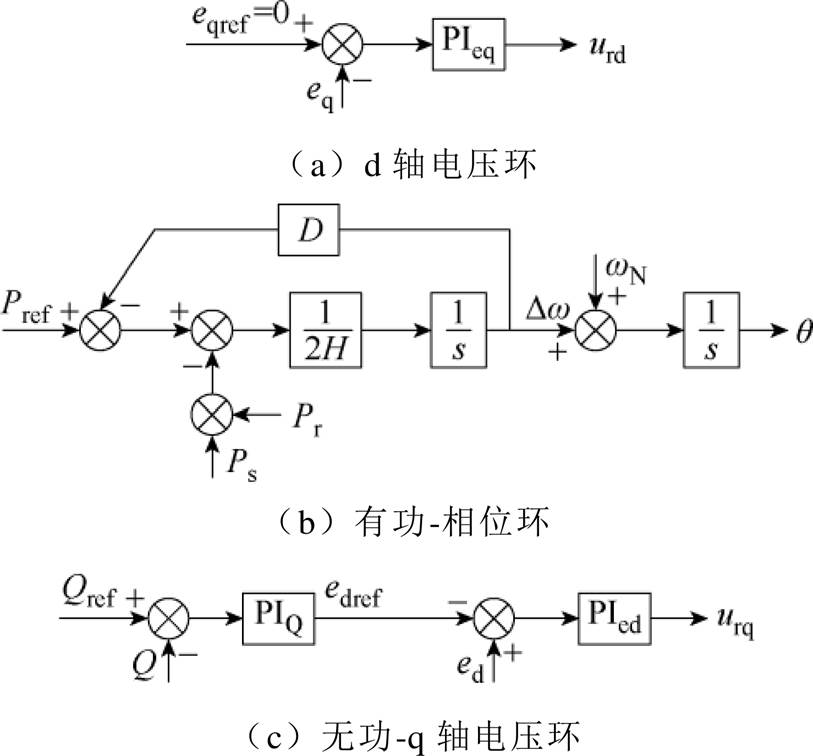
图3 基于双馈风机暂态电动势控制自同步控制策略框图
Fig.3 Diagram of the self-synchronization control strategy based on transient electromotive force control of DFIG
图3的自同步控制策略要求实时获取ed和eq。考虑到电机暂态电动势直接测量的困难性,一般均通过电机端电压和电流的测量值间接计算得到ed和eq,即
 (4)
(4)
式中,usd和usq分别为双馈风机定子端电压的d轴和q轴分量。事实上,由于出厂测量精度问题以及实际运行时参数漂移问题,双馈风机暂态电抗通常存在不确定的误差。将式(4)计算得到的ed和eq作为反馈信号可能对闭环系统的稳定性造成不良影响。因此,本文将进一步对图3所示自同步控制的PI参数进行合理整定,从而增强闭环系统对风机参数误差的鲁棒性,降低系统由于参数不确定性而导致的失稳风险。
如第1节所述,本文所提自同步控制框图(见图3)将使用式(4)间接获取暂态电动势ed和eq的反馈值。因此,风机参数的不确定性可能导致反馈信号存在显著误差,进而对自同步控制闭环系统的稳定性造成不良影响。针对此问题,本文将应用一种鲁棒参数设计方法来整定自同步控制中的PI参数,从而增强自同步控制策略对参数误差的免疫性,提升闭环系统的鲁棒稳定性。
作为鲁棒PI参数设计的基础,本文将首先建立双馈风机-无穷大系统(见图2)的开环系统模型。在建模过程中,忽略电机定子绕组的电磁暂态过程,即用相量模型描述风机机电动态过程。此外,因定子绕组电阻较小,忽略其影响。双馈风机GSC采用定直流电压和定网侧无功控制(设置为零)。值得说明的是,图3中的PIQ主要用于模拟同步发电机的无功-电压动态响应特性。因此,本文研究的PI参数整定仅针对PIed和PIeq。如图3所示,以urd和urq为输入、ed-edref和eq-eqref为输出的开环双馈风机动态可用如下非线性微分代数方程组描述。
 (5)
(5)
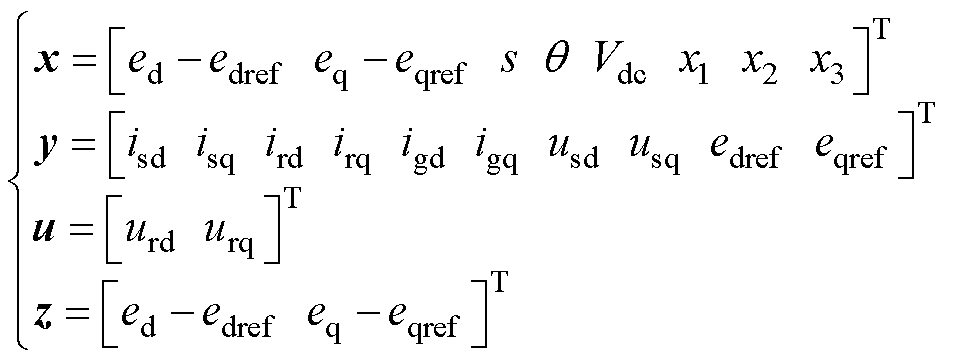
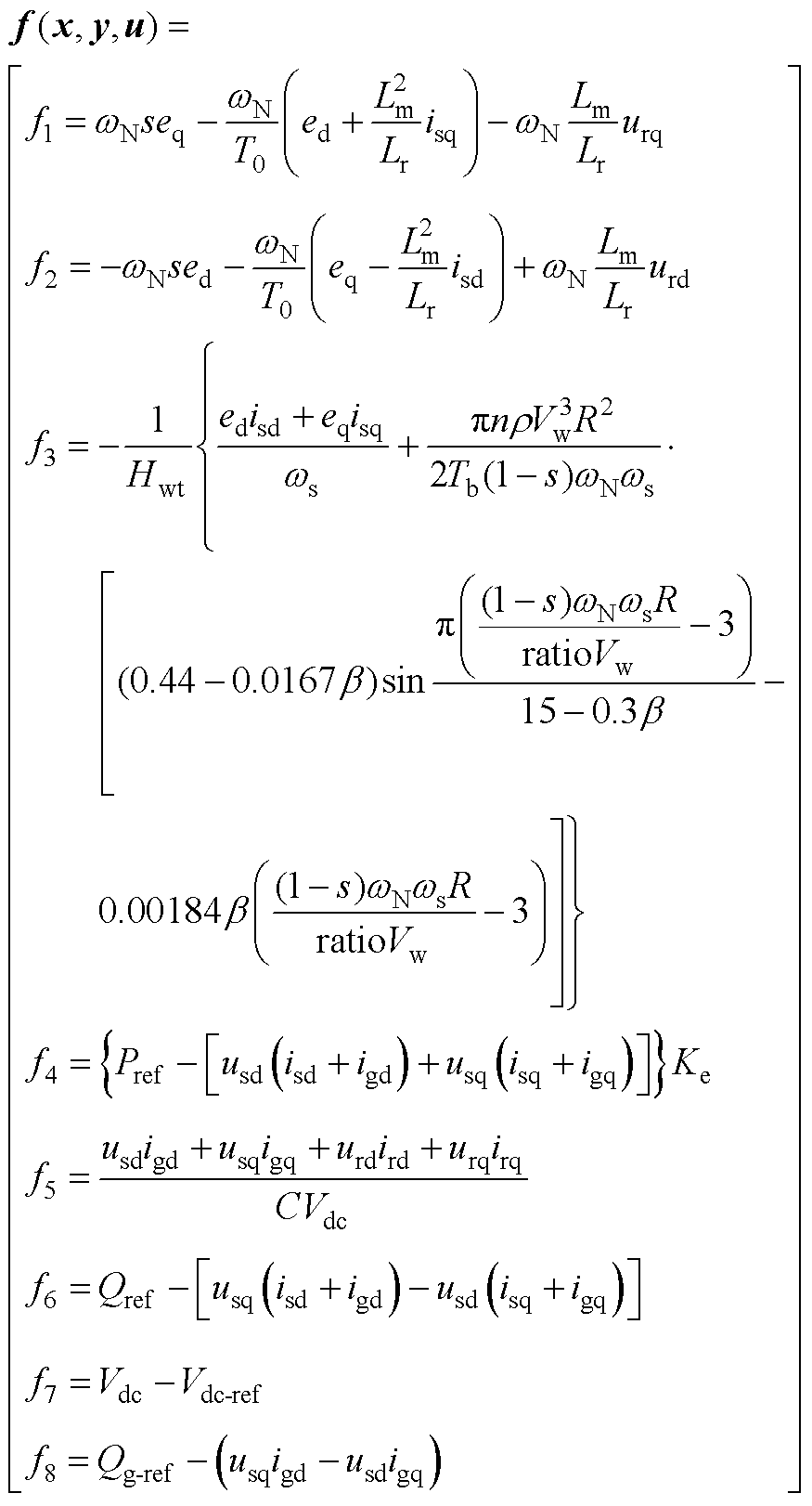
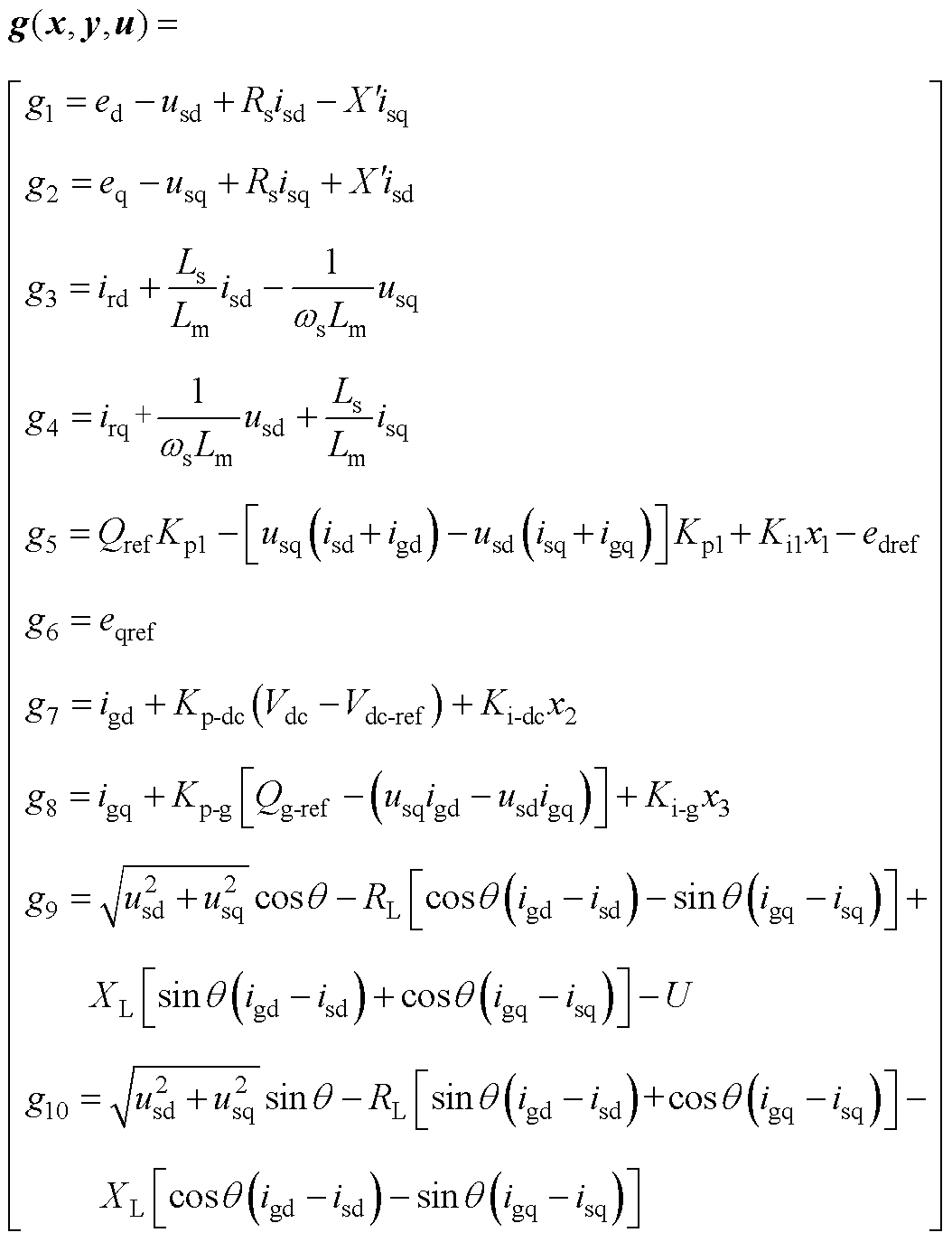
式中,x和y分别为状态变量和代数变量组成的向量;z和u分别为输出变量和输入变量组成的向量。这些向量的具体形式为
 (6)
(6)
式中, 为双馈风机直流电容电压;
为双馈风机直流电容电压; 为设定的无功环中间变量,
为设定的无功环中间变量, 与
与 为设定的网侧控制中间变量;ird和irq分别为转子电流的d轴和q轴分量;igd和igq分别为网侧电流的d轴和q轴分量。此外,微分方程f、代数方程g以及输出方程z的具体形式在附录中给出。
为设定的网侧控制中间变量;ird和irq分别为转子电流的d轴和q轴分量;igd和igq分别为网侧电流的d轴和q轴分量。此外,微分方程f、代数方程g以及输出方程z的具体形式在附录中给出。
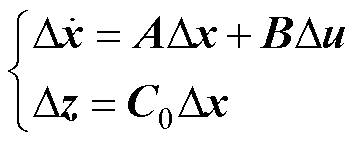
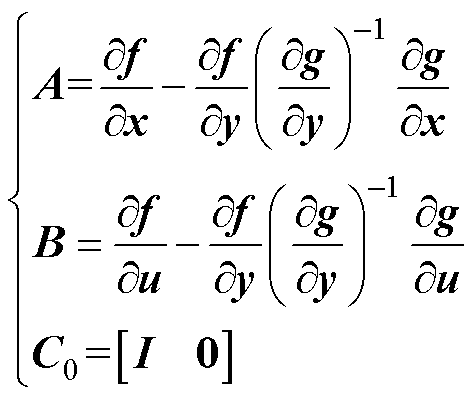
显然,直接针对非线性输入-输出系统式(5)设计鲁棒控制器PIed和PIeq非常困难,而线性鲁棒控制理论则较成熟。因此,本文将对开环系统式(5)在平衡点处线性化,有
 (7)
(7)
其中
 (8)
(8)
式中, 表示相应量对于平衡点的偏移量;A为状态矩阵;B为输入矩阵;C0为反馈矩阵。
表示相应量对于平衡点的偏移量;A为状态矩阵;B为输入矩阵;C0为反馈矩阵。
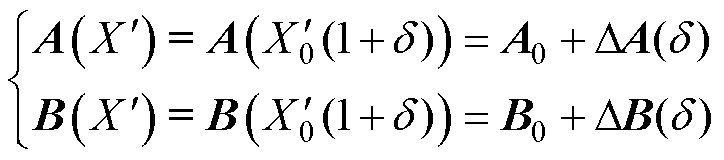
状态矩阵A和输入矩阵B均为包含不确定性参数的参数化矩阵,可以进一步将其表征为
 (9)
(9)
式中,A0和B0分别为参数取标称值 时A和B的值;
时A和B的值; 为参数偏离标称值的程度。因此,接下来将针对开环线性系统式(7)设计控制器PIed和PIeq,使得闭环系统在存在不确定性(DA和DB)的情况下仍能保持稳定,针对开环系统的控制器设计示意图如图4所示。图中,d为闭环系统的外部扰动输入,可以用来模拟测量噪声,Kp1、Ki1、Kp2和Ki2为待设计的PI控制器参数。
为参数偏离标称值的程度。因此,接下来将针对开环线性系统式(7)设计控制器PIed和PIeq,使得闭环系统在存在不确定性(DA和DB)的情况下仍能保持稳定,针对开环系统的控制器设计示意图如图4所示。图中,d为闭环系统的外部扰动输入,可以用来模拟测量噪声,Kp1、Ki1、Kp2和Ki2为待设计的PI控制器参数。
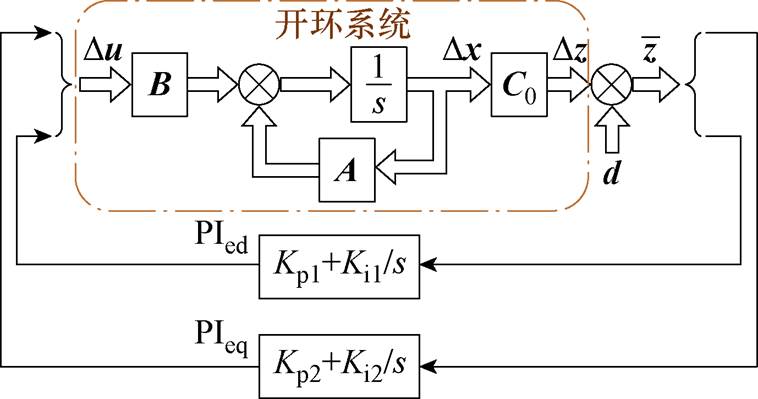
图4 针对开环系统的控制器设计示意图
Fig.4 Schematic diagram of controller design for the open-loop system
根据图4,控制输入Du可以表示为
 (10)
(10)
其中
式中,ξ为控制器PIed和PIeq的状态变量组成的向量。进一步引入增广状态向量 ,并结合式(7)和式(9)可得到增广开环系统为
,并结合式(7)和式(9)可得到增广开环系统为
 (11)
(11)
其中
因此,图4的闭环系统可以看成是式(11)对应的“开环系统”施加反馈控制 而构成,其中,
而构成,其中, ,并且该闭环系统可以描述为
,并且该闭环系统可以描述为
 (12)
(12)
对含不确定性参数的矩阵DA和DB进行分解,有
 (13)
(13)
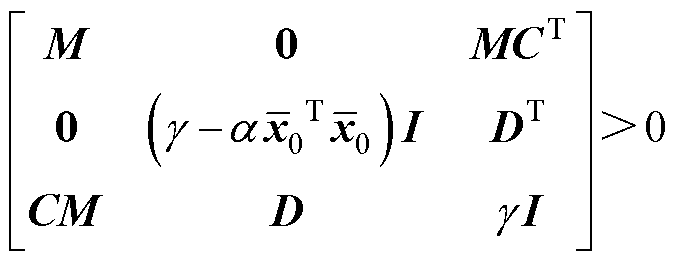
式中,D1, D2、E1, E2都为适当维数的常数矩阵;F1和F2为参数化矩阵,通常称之为变扰动矩阵。在得到常数矩阵D1, D2、E1, E2后,状态反馈闭环系统式(12)的增益矩阵K可以通过如下稳定性定理计算获得。
定理[31]:对于给定参数 ,
, ,
, 和
和 ,若存在适当维数的矩阵
,若存在适当维数的矩阵 ,
, ,满足矩阵不等式条件
,满足矩阵不等式条件
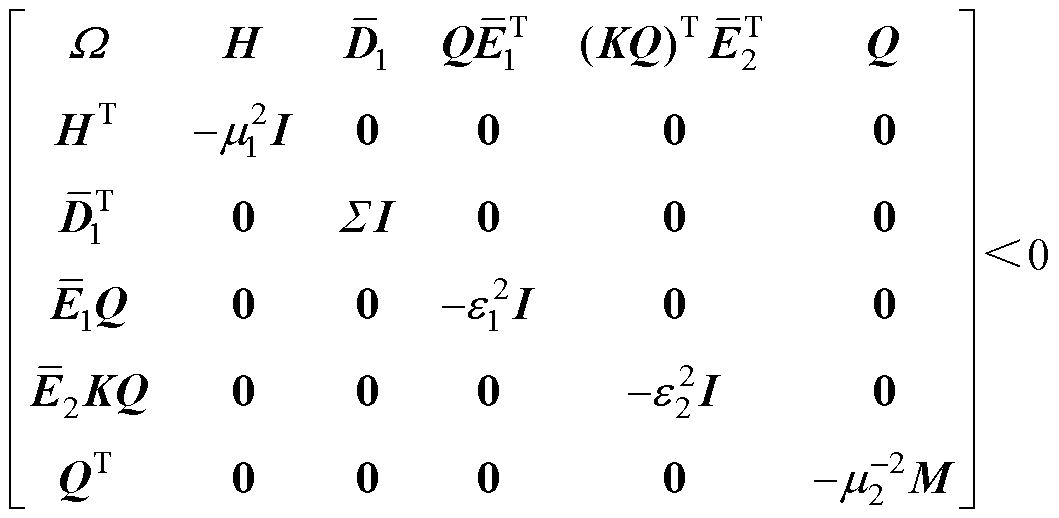 (14)
(14)
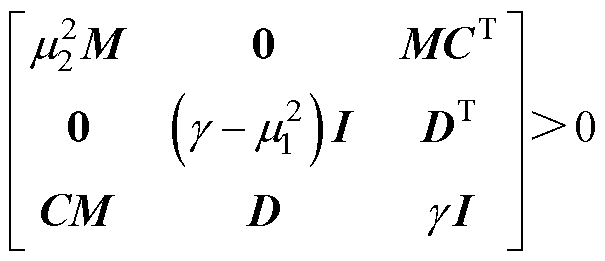 (15)
(15)
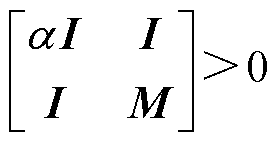 (16)
(16)
 (17)
(17)
其中

式中,sym( · )为对括号内的矩阵加上其自身的转置; 为增广状态变量初始值,故
为增广状态变量初始值,故 为初始状态偏移的“强度”。那么,增益矩阵
为初始状态偏移的“强度”。那么,增益矩阵 将使闭环系统式(12)渐近稳定,同时满足性能指标
将使闭环系统式(12)渐近稳定,同时满足性能指标 ,矩阵Q、M、可以通过求解线性矩阵不等式(14)~式(17)获得。
,矩阵Q、M、可以通过求解线性矩阵不等式(14)~式(17)获得。
值得说明的是:基于上述稳定性定理对闭环系统式(12)的状态反馈矩阵K进行设计只与常数矩阵D1, D2、E1, E2相关,而与包含不确定性参数的矩阵F1和F2无关。换而言之,如果d 在某个范围内变化时,存在D1, D2、E1, E2使得式(13)恒成立,那么基于上述方法设计得到的状态反馈矩阵K(即对应的PI参数)能使闭环系统具有鲁棒稳定性,即d 在该范围内变化时闭环系统仍能保证稳定性。然而,针对一般的系统,当不确定性参数大范围变化时,获取恒满足式(13)的常数矩阵D1, D2、E1, E2并非易事。
理论上讲,如果想要得到最优的D1, D2、E1, E2,需要以这四个矩阵的元素为搜索变量,构建一个以表征的不确定性参数可变范围为目标函数、以该参数范围内式(13)均成立为约束条件的优化问题,通过求解该优化问题获取最优的设计矩阵。然而,考虑到矩阵 和
和 中元素是关于的非线性函数,并且在优化过程中确保式(13)对某个范围内所有均成立是非常困难的,因此上述通过优化方法求取最佳设计矩阵D1, D2、E1, E2的思路尚处于理论可行阶段,难以实际应用,因此实现该鲁棒控制设计方法一般采用经验试错法。实际上,使用经验试错法得到的是次优的设计矩阵D1, D2、E1, E2,基于此设计矩阵而得到的PI控制器参数难以保证具有最佳的鲁棒特性。但是,相较于传统PI控制器设计无法显式计及系统参数的不确定性,根据经验试错法设计得到的PI控制参数可以直接明确保证在某个系统参数范围内的鲁棒性,只不过无法确保此参数可变范围是最大的。
中元素是关于的非线性函数,并且在优化过程中确保式(13)对某个范围内所有均成立是非常困难的,因此上述通过优化方法求取最佳设计矩阵D1, D2、E1, E2的思路尚处于理论可行阶段,难以实际应用,因此实现该鲁棒控制设计方法一般采用经验试错法。实际上,使用经验试错法得到的是次优的设计矩阵D1, D2、E1, E2,基于此设计矩阵而得到的PI控制器参数难以保证具有最佳的鲁棒特性。但是,相较于传统PI控制器设计无法显式计及系统参数的不确定性,根据经验试错法设计得到的PI控制参数可以直接明确保证在某个系统参数范围内的鲁棒性,只不过无法确保此参数可变范围是最大的。
接下来本文将通过算例验证上述方法对于双馈风机自同步控制鲁棒参数设计的适用性。
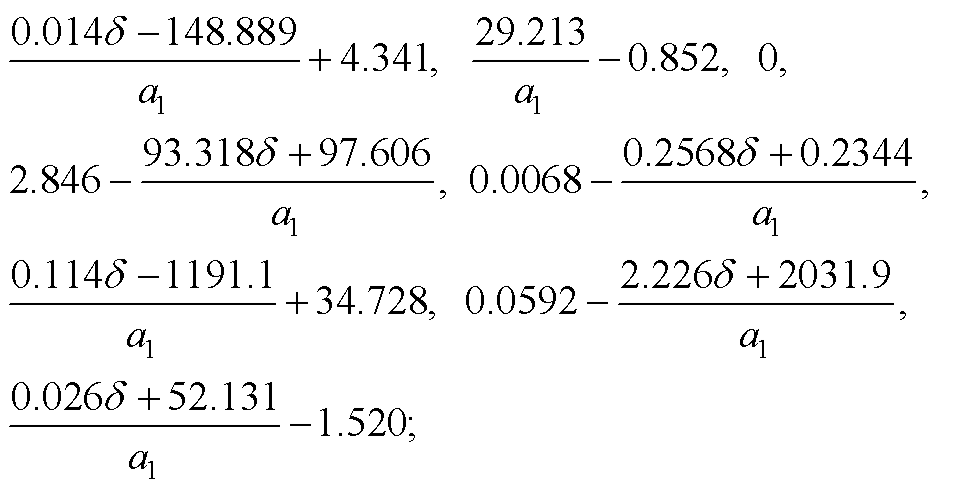
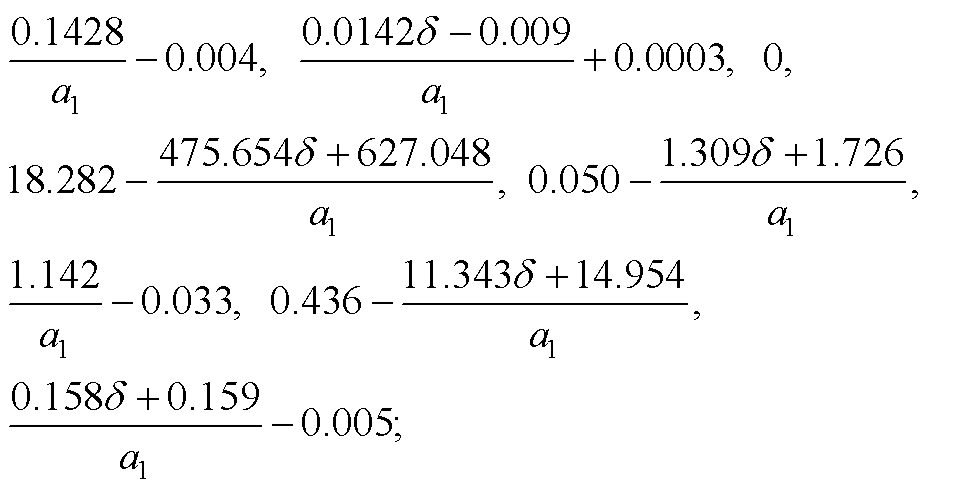
根据图2所示双馈风机单机无穷大系统,表1给出了相应的仿真参数,通过表1和式(9)可以计算得到 和
和 的具体表达式见附录。如2.1节所述,获取式(13)中的D1, D2、E1, E2并非易事,而若需满足式(13),即矩阵
的具体表达式见附录。如2.1节所述,获取式(13)中的D1, D2、E1, E2并非易事,而若需满足式(13),即矩阵 与
与 的最大特征值小于或等于1。本节采用经验试错法将D1, D2、E1, E2取为同样的
的最大特征值小于或等于1。本节采用经验试错法将D1, D2、E1, E2取为同样的 倍单位矩阵
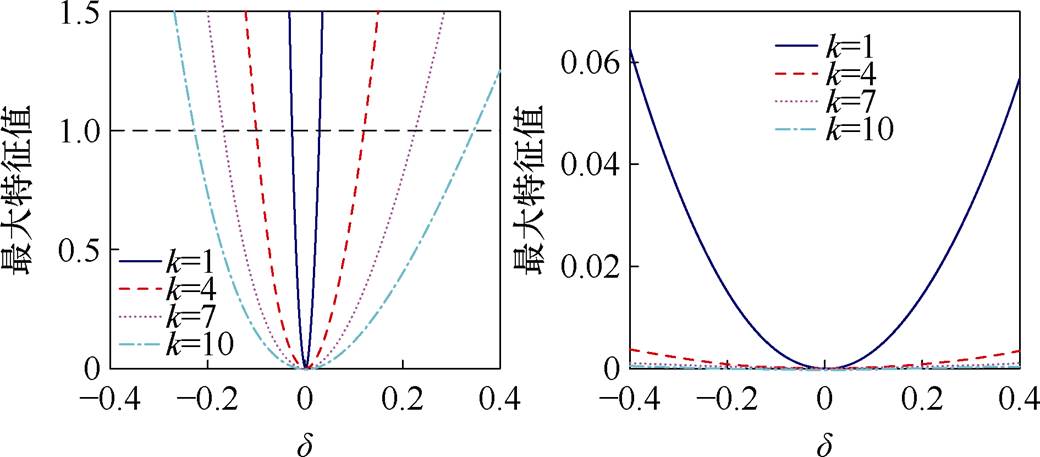
倍单位矩阵 ,分别画出此时与最大特征值和的关系曲线如图5所示。由图5可知,随着值增大,矩阵和最大特征值达到1时所对应的绝对值也越大,并且矩阵最大特征值随的变化速率明显高于矩阵。
,分别画出此时与最大特征值和的关系曲线如图5所示。由图5可知,随着值增大,矩阵和最大特征值达到1时所对应的绝对值也越大,并且矩阵最大特征值随的变化速率明显高于矩阵。
表1 双馈风机单机无穷大系统仿真参数
Tab.1 Simulation parameters of single DFIG connected to infinite bus
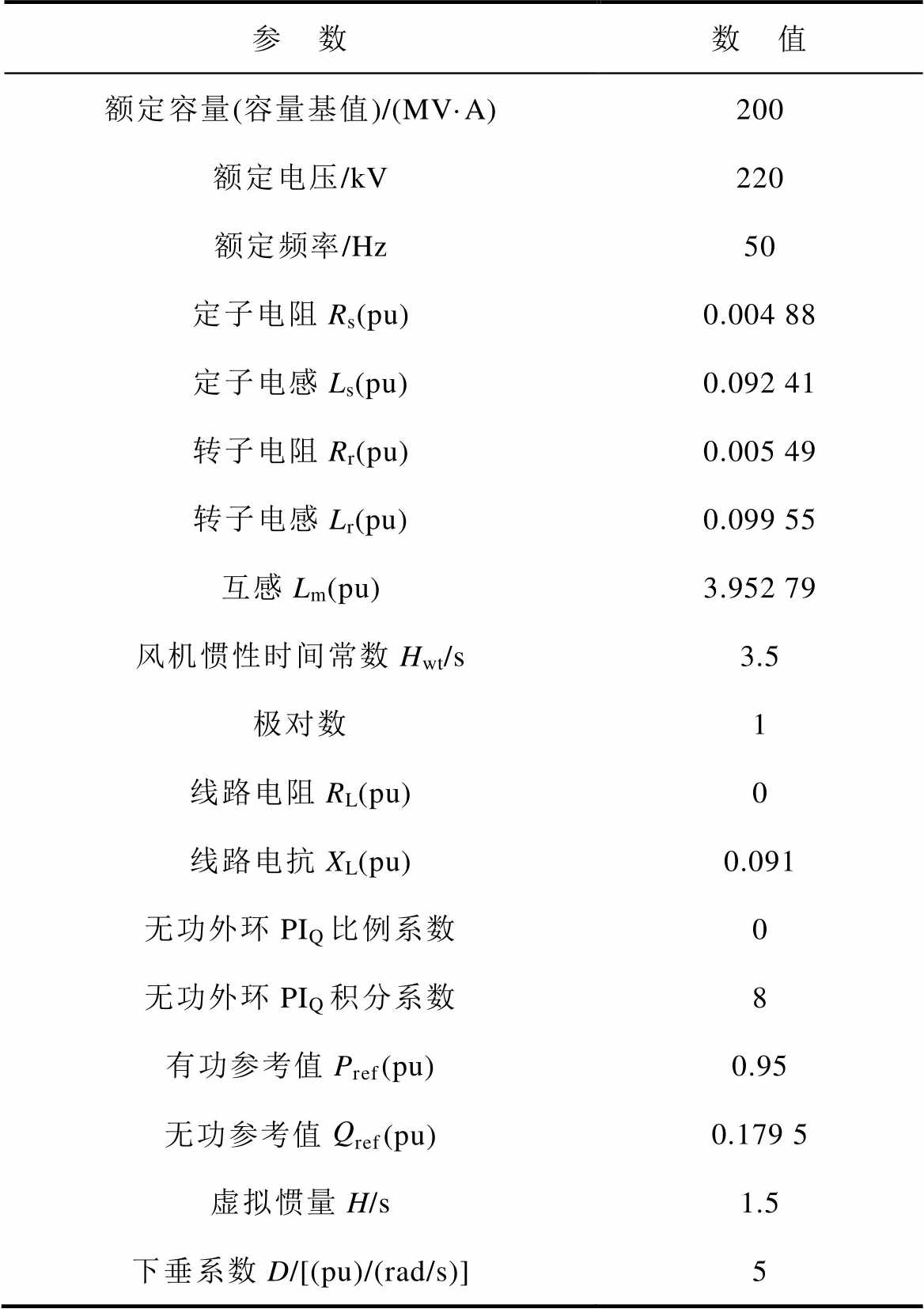
参 数数 值 额定容量(容量基值)/(MV·A)200 额定电压/kV220 额定频率/Hz50 定子电阻Rs(pu)0.004 88 定子电感Ls(pu)0.092 41 转子电阻Rr(pu)0.005 49 转子电感Lr(pu)0.099 55 互感Lm(pu)3.952 79 风机惯性时间常数Hwt/s3.5 极对数1 线路电阻RL(pu)0 线路电抗XL(pu)0.091 无功外环PIQ比例系数0 无功外环PIQ积分系数8 有功参考值Pref(pu)0.95 无功参考值Qref(pu)0.179 5 虚拟惯量H/s1.5 下垂系数D/[(pu)/(rad/s)]5
(a) (b)
(b)
图5  与
与 在不同
在不同 下最大特征值与
下最大特征值与 的关系
的关系
Fig.5 The relationship between the maximum eigenvalue and of and at different values
此外,由图5a可知,当k=10时,虽然满足式(13)的最大可以达到34.5%,但此时无法找到对应的常数、 (
( ),和使得线性矩阵不等式(14)~式(17)有解。事实上,当k最大取为7.3时,矩阵最大特征值率先达到1对应的值上下限分别为23.2%与-17.4%。此时,可以较容易取得一组设计参数使得线性矩阵不等式(14)~式(17)有解,有:
),和使得线性矩阵不等式(14)~式(17)有解。事实上,当k最大取为7.3时,矩阵最大特征值率先达到1对应的值上下限分别为23.2%与-17.4%。此时,可以较容易取得一组设计参数使得线性矩阵不等式(14)~式(17)有解,有:
 。
。
同时,求解线性矩阵不等式(14)~式(17)得到的单机无穷大系统中自同步鲁棒PI参数为:
 。
。
为了与鲁棒PI参数进行对比分析,本文仿真还将使用一组普通PI参数为:
 。
。
值得说明的是,在保证设计参数、()、 和
和 均保持不变的前提下,将上述普通PI参数代入增益矩阵K,无法找到与之适配的正定矩阵Q和M使得式(14)~式(17)成立,说明不确定性参数在上述可变范围内变化时,普通PI控制器无法保证闭环系统的小扰动稳定性。
均保持不变的前提下,将上述普通PI参数代入增益矩阵K,无法找到与之适配的正定矩阵Q和M使得式(14)~式(17)成立,说明不确定性参数在上述可变范围内变化时,普通PI控制器无法保证闭环系统的小扰动稳定性。
为验证本文所提双馈风机自同步控制策略的有效性,本节将基于图6所示单机无穷大电源带负荷系统开展仿真测试,双馈风机以及线路阻抗等参数见表1,图6中负荷1连接于无穷大系统出口,大小为191.44 MW(0.957 2(pu))。双馈风机的最大出力可达1.010 4(pu),而稳态运行时出力为0.949 8(pu),转速高于最优转速,即减载5.02%;此时无穷大电源向负荷提供的功率为0.007 4(pu)。
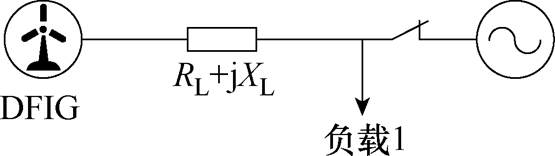
图6 自同步控制双馈风机的自同步效果仿真验证系统示意图
Fig.6 Schematic diagram of simulation verification for self-synchronization effect of self-synchronization control DFIG
试验中双馈风机使用了本文所提自同步控制策略,且采用鲁棒性PI参数(见3.1节)。在第2 s时突然断开无穷大电源开关,图7为自同步控制双馈风机的动态过程。
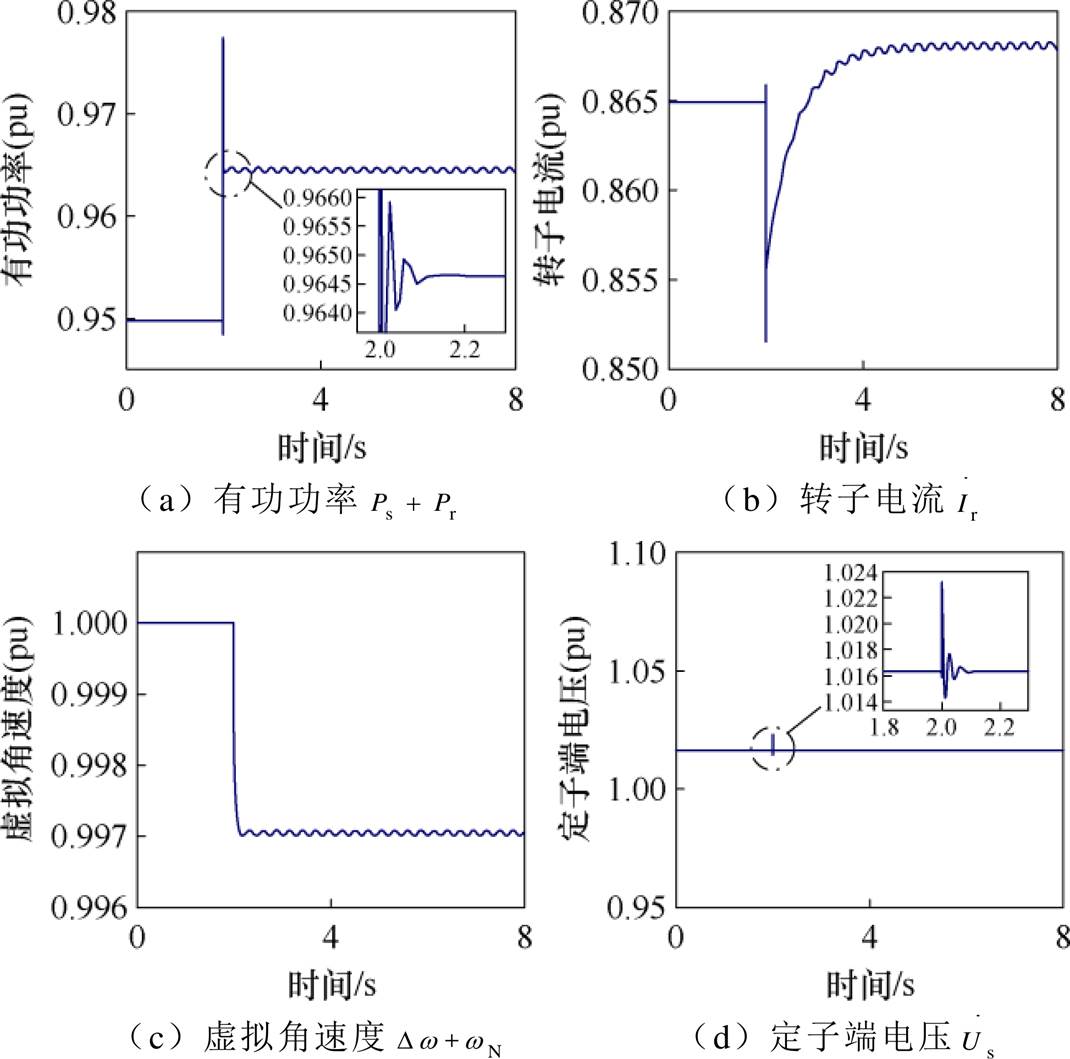
图7 双馈风机单机系统频率降低试验各变量变化情况
Fig.7 Changes of variables in the frequency reduction test of a single machine system with DFIG
可以看出,损失了无穷大电源后的双馈风机带负荷系统仍然能够稳定运行。很显然,换作传统的跟网型双馈风机这是无法做到的。因此,这也直接验证了本文所提双馈风机自同步控制策略的有效性。此外,开关断开后风机按下垂特性承担了由无穷大电源所提供的负荷功率,通过降低风机转速来增大有功功率输出,并且转子电流也相应增大。自同步控制双馈风机的虚拟角速度最终稳定在0.997(pu)(49.85 Hz)。通过观察图7a可知,损失无穷大电源后双馈风机的稳态输出有功功率增量约为0.014 7(pu),因此可以估算出自同步控制的下垂控制系数为0.0147/0.003=4.9。同时,图7a中切断电源后50 ms内的平均输出有功功率变化量约为0.014 0(pu),而图7c中切断电源后50 ms内的平均频率变化率约为0.004 5(pu)/s,因此可估算出自同步控制的惯性时间系数约为0.0140/0.0045/2≈1.56。估算结果与仿真所设置的自同步控制参数D和H基本相符,也说明了自同步控制双馈风机成功地模拟了同步发电机的下垂控制特性和惯量,因此可以对电网提供频率支撑。由于切断电源事件并未导致系统出现大幅无功功率不平衡,因此自同步控制双馈风机的定子端电压在经历非常轻微的波动后迅速恢复至扰动前水平,如图7d所示。
本节首先对采用不同PI参数的自同步控制双馈风机单机无穷大系统进行小扰动试验,即代入3.1节两组PI参数,在不同 值下求得闭环系统状态矩阵的特征根,并将最大的特征根的实部列于表2。
值下求得闭环系统状态矩阵的特征根,并将最大的特征根的实部列于表2。
表2 单机无穷大系统中闭环系统状态矩阵实部最大特征根的实部
Tab.2 The real part of the maximum eigenvalue of the real part of the closed-loop system state matrix in a single machine infinite bus system
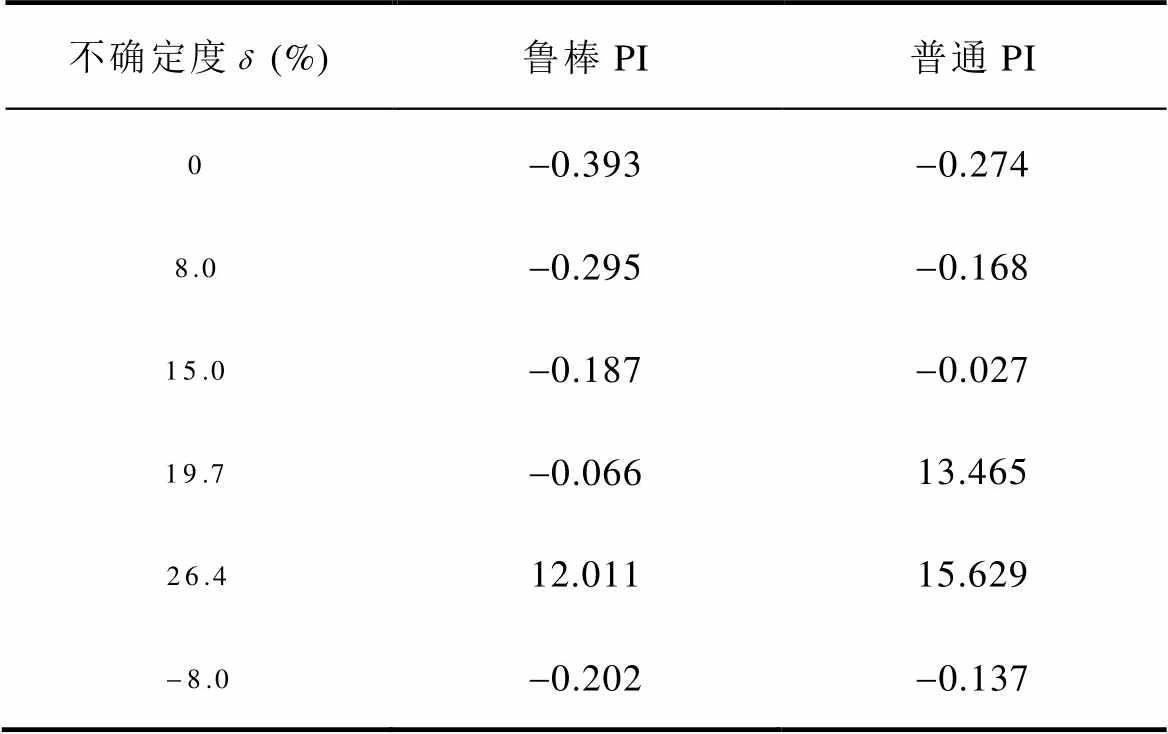
不确定度(%)鲁棒PI普通PI -0.393-0.274 -0.295-0.168 -0.187-0.027 -0.06613.465 12.01115.629 -0.202-0.137
可以看出,随着风机暂态电抗不确定度的增大,闭环系统实部最大的特征根开始朝复平面右半平面移动,系统小扰动稳定性逐步恶化。然而,采用普通PI参数的闭环系统稳定性恶化速度更快,当d 约为20%的时候,系统已经小扰动不稳定,而此时采用鲁棒PI参数的闭环系统仍然稳定。因此,上述试验结果支撑了本文所提鲁棒PI参数设计在单机无穷大系统中的有效性。
本节将对采用不同PI参数的自同步控制双馈风机单机无穷大系统进行大扰动试验。试验基于图8所示单机无穷大电源系统和表1所示参数(其中负荷1仍为191.44 MW),在无穷大电源端口处施加三相短路,短路发生时刻为第2 s,仿真持续时间为12 s。取=8%并进行两组对照短路试验:第一组的短路持续时间为0.1 s,第二组则为0.114 s。
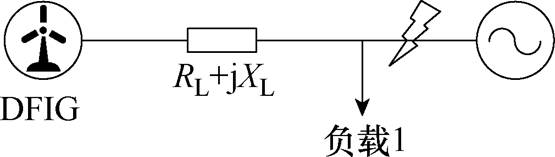
图8 单机无穷大系统中双馈风机自同步控制策略鲁棒性验证系统示意图
Fig.8 Schematic diagram of robustness verification for self-synchronization control strategy of DFIG in a single-machine infinite-bus system
图9和图10分别给出了三相短路持续时间为0.1 s和0.114 s时自同步控制双馈风机部分变量随时间的变化情况。可以看出,当短路持续时间为0.1 s时,采用两组PI参数的闭环系统均能保持稳定,并且二者的曲线动态大致相似。但是,当短路持续时间增大至0.114 s,采用鲁棒PI参数的闭环系统仍能保持暂态稳定而采用普通PI参数的闭环系统却已失稳。
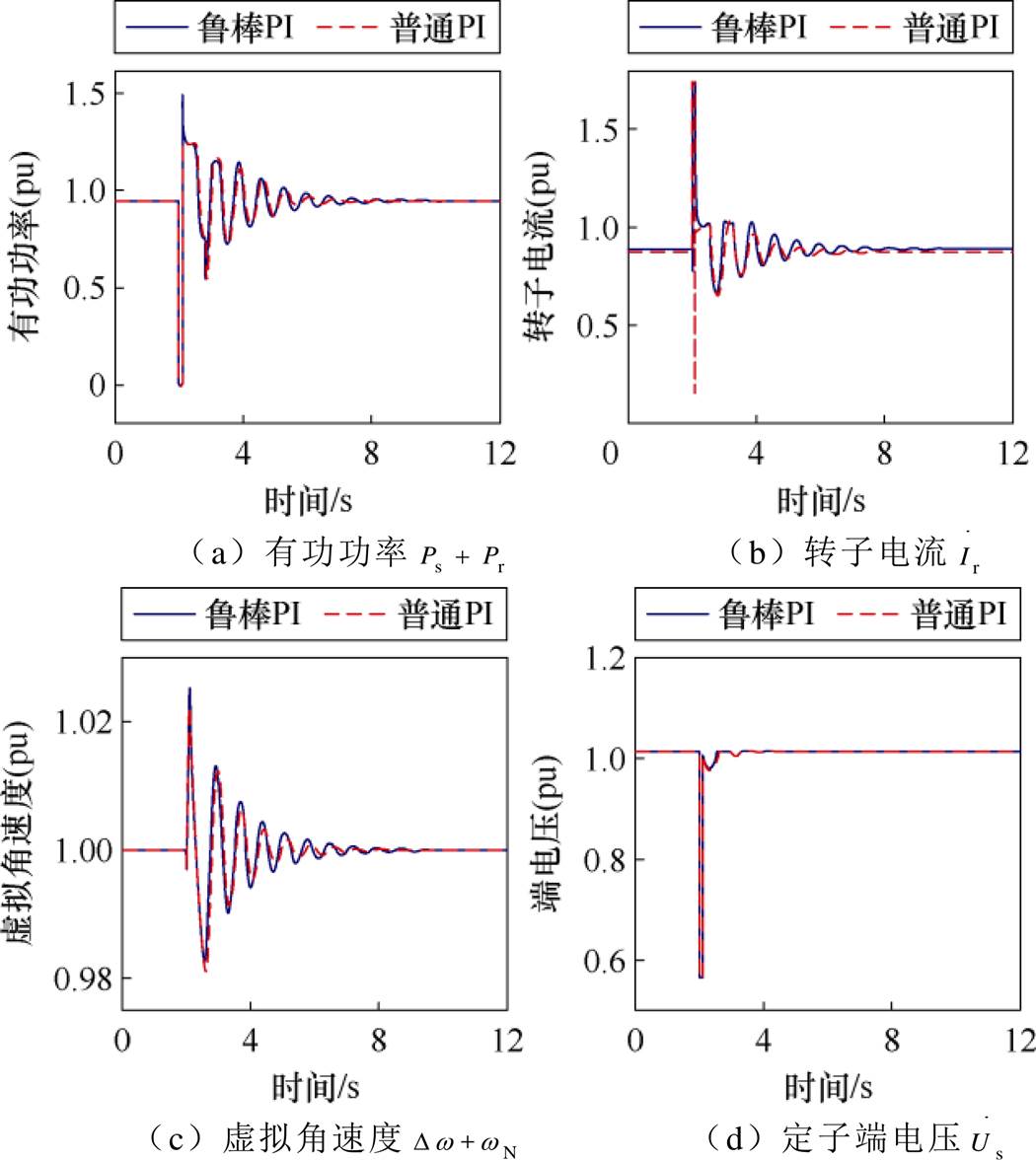
图9 单机无穷大系统中三相短路持续时间为0.1 s时自同步控制双馈风机各变量变化情况
Fig.9 Evolution of variables of DFIG under self- synchronization control when subjected to a three-phase short-circuit fault lasting for 0.1 s in a single-machine infinite-bus system
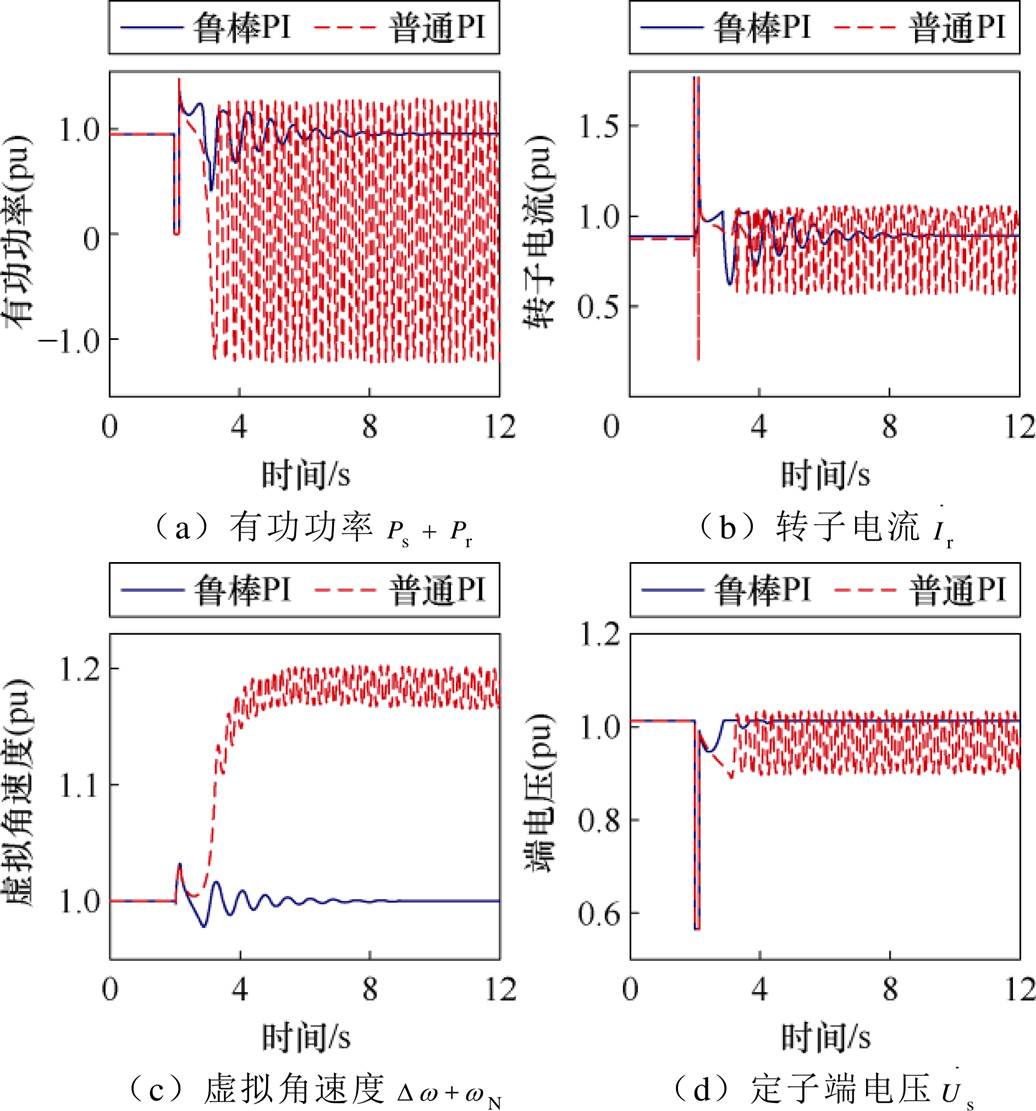
图10 单机无穷大系统中三相短路持续时间为 0.114 s时自同步控制双馈风机各变量变化情况
Fig.10 Evolution of variables of DFIG under self-synchronization control when subjected to a three-phase short-circuit fault lasting for 0.114 s in a single-machine infinite-bus system
实际上,图9展示了在短路持续时间较短的情况下,普通PI参数可能实现较好的控制效果(见图9a有功功率),在系统受扰后的动态控制性能上鲁棒PI参数略微不如普通PI参数。但这往往是以牺牲一部分稳定裕度为代价的。当系统面临较为严重的故障,如图10所示,普通PI参数会由于稳定裕度不足而先于鲁棒PI参数达到不稳定边界。因此,图9和图10对比可以说明,鲁棒PI参数在大扰动稳定裕度上要优于普通PI参数。
此外,对不同暂态电抗不确定度下两组PI参数的单机无穷大系统三相短路试验效果进行对比,所测得最大短路持续时间见表3。
表3 单机无穷大系统中最大短路持续时间
Tab.3 Maximum short-circuit duration in a single-machine infinite-bus system
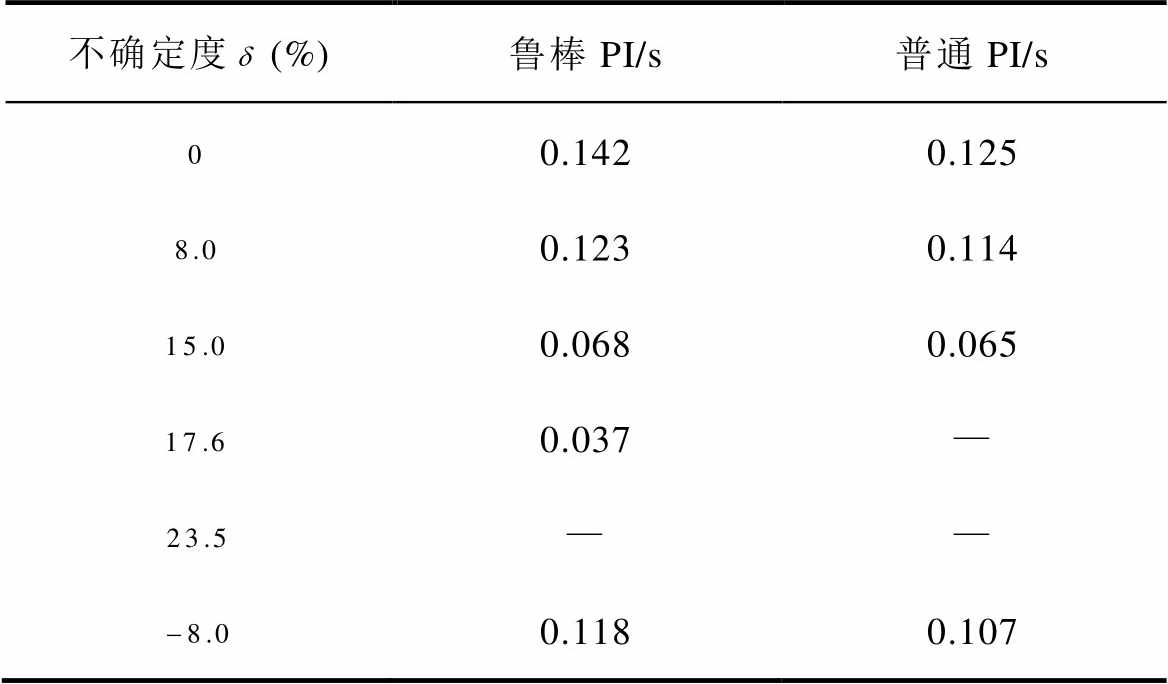
不确定度(%)鲁棒PI/s普通PI/s 0.1420.125 0.1230.114 0.0680.065 0.037— —— 0.1180.107
由表3可知,当变化时,采用鲁棒PI参数的闭环系统的最大短路持续时间均大于采用普通PI参数的系统。并且,当 时,采用普通PI参数的闭环系统在不加短路故障之前就已失稳(小扰动不稳定);当
时,采用普通PI参数的闭环系统在不加短路故障之前就已失稳(小扰动不稳定);当 时,采用两组PI参数的闭环系统均无法保持小扰动稳定。因此,由本节仿真分析结果证明,本文所提鲁棒PI参数设计在单机无穷大系统的有效性。
时,采用两组PI参数的闭环系统均无法保持小扰动稳定。因此,由本节仿真分析结果证明,本文所提鲁棒PI参数设计在单机无穷大系统的有效性。
本节将进一步在多机系统中对所提双馈风机鲁棒自同步控制策略进行仿真验证。仿真基于图11所示经典三机九节点系统,双馈风机连接于线路L3,三台同步机参数完全相同,双馈风机三机九节点系统仿真参数(部分)见表4。此外,除了容量有所微调以外,双馈风机所用参数仍与3.3节算例相同,详见表1。稳态时双馈风机减载5.02%,仍处于超同步速运行状态。
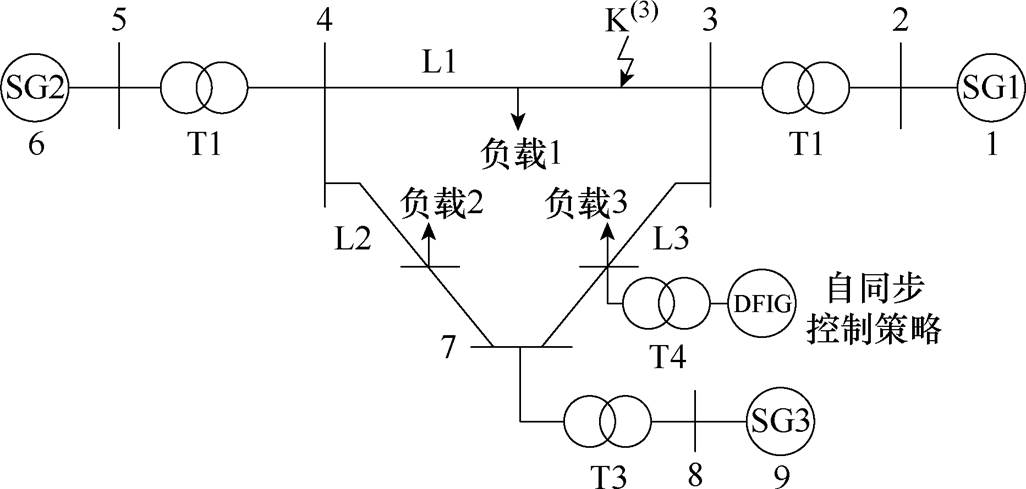
图11 接入鲁棒自同步控制双馈风机的三机九节点系统示意图
Fig.11 Schematic diagram of a three machine nine node system with robust self-synchronization control for DFIG
表4 双馈风机三机九节点系统仿真参数(部分)
Tab.4 Simulation parameters of a three-machine nine-bus system for DFIG (partial)
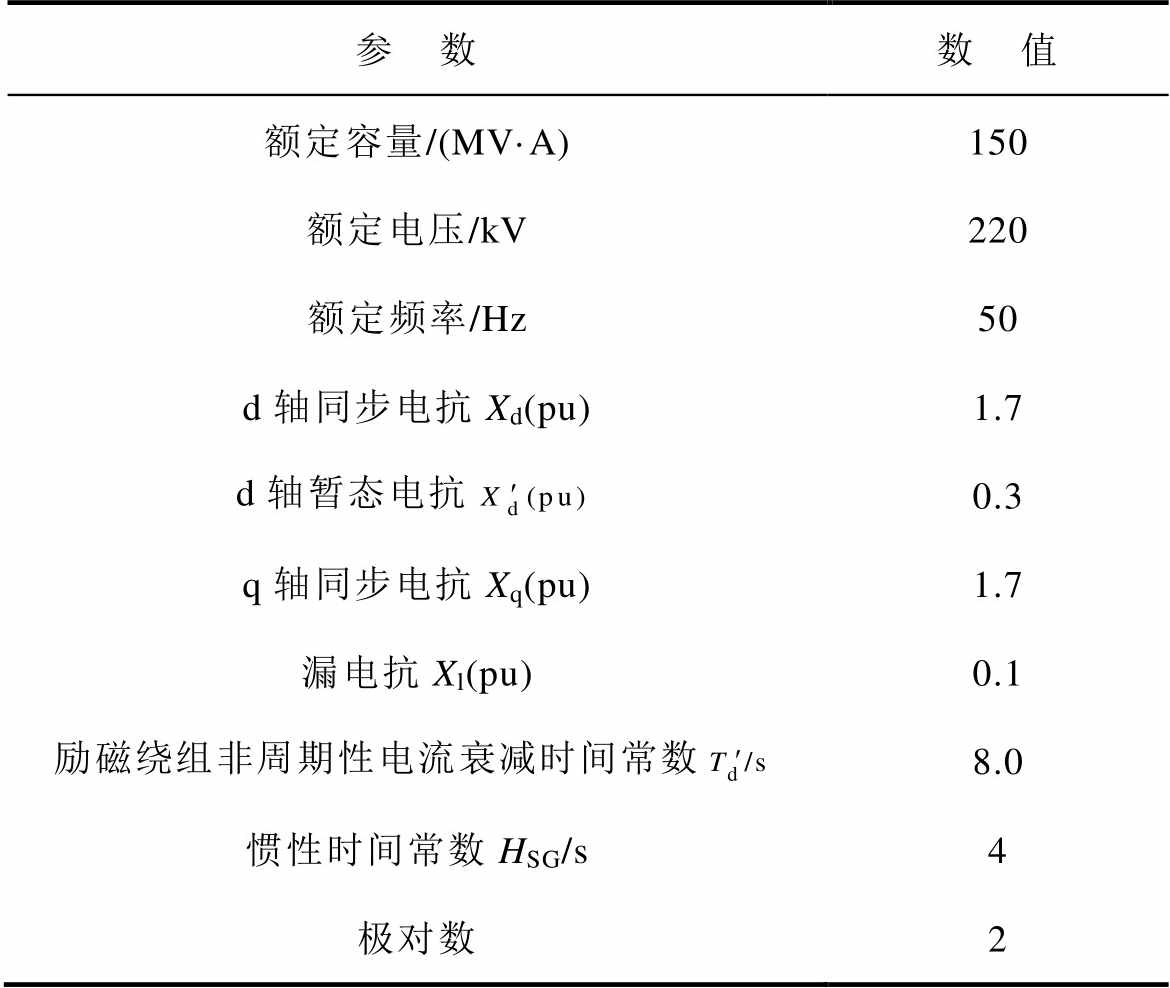
参 数数 值 额定容量/(MV·A)150 额定电压/kV220 额定频率/Hz50 d轴同步电抗Xd(pu)1.7 d轴暂态电抗0.3 q轴同步电抗Xq(pu)1.7 漏电抗Xl(pu)0.1 励磁绕组非周期性电流衰减时间常数8.0 惯性时间常数HSG/s4 极对数2
注:同步机参数(SG1、SG2、SG3参数相同)。
值得注意的是,接入双馈风机的三机九节点系统的数学模型较为复杂,难以像2.1节单机无穷大系统一样显式写出状态矩阵、输入矩阵的具体表达形式。此外,由于原始模型的阶数较高,直接针对其进行鲁棒PI参数设计将会比较复杂(事实上,对于更大规模的系统,这个问题会愈加突出)。因此,在进行控制器设计前,有必要对开环系统进行降阶处理。首先,在平衡点处将开环系统线性化,然后使用Matlab软件中的schurmr函数对开环线性模型降阶至10阶。对于任意给定的暂态电抗不确定度,均可求得降阶后的矩阵DA和DB,在此基础上就可以仿照3.3节算例确定降阶后的常数矩阵D1, D2、E1, E2,从而用于后续鲁棒PI参数设计。
本节仍采用经验试错法将式(13)中的常数矩阵D1, D2、E1, E2取为同样的 倍单位矩阵。与3.1节分析过程类似,可以求出
倍单位矩阵。与3.1节分析过程类似,可以求出 与
与 在不同k下最大特征值与的关系。实际上,对于三机九节点系统而言,当最大取为5.5时,矩阵最大特征值率先达到1时对应的值上、下限分别为16.8%与-11.2%,而矩阵相应的值上、下限可高达638.23%与-593.45%。此时,鲁棒PI控制器参数设计的相关参数取值为:
在不同k下最大特征值与的关系。实际上,对于三机九节点系统而言,当最大取为5.5时,矩阵最大特征值率先达到1时对应的值上、下限分别为16.8%与-11.2%,而矩阵相应的值上、下限可高达638.23%与-593.45%。此时,鲁棒PI控制器参数设计的相关参数取值为:
 。
。
同时,求解线性矩阵不等式(14)~式(17),得到三机九节点系统中双馈风机的鲁棒PI控制器参数为:
作为对比,本节仿真使用的普通PI控制器参数取值为: 。
。
经验证可知,上述普通PI参数不满足矩阵不等式(14)~式(17)。
接下来本节将对包含自同步控制双馈风机的三机九节点系统进行小扰动试验:代入上述两组PI参数,在不同值下求得闭环系统状态矩阵的特征根,并将特征根的实部最大值列于表5。与3.3节单机无穷大系统的小扰动试验结论类似,随着暂态电抗参数逐渐远离标称值,闭环系统的稳定性逐渐变差。但是,相较于普通PI控制器,鲁棒PI控制器能够耐受更大的参数漂移而保证闭环系统的稳定性,这也说明本文所提鲁棒PI参数设计方法在多机系统中同样有效。
表5 三机九节点系统中闭环系统状态矩阵实部最大特征根的实部
Tab.5 The real part of the maximum eigenvalue of the real part of the closed-loop system state matrix in a three-machine nine-bus system

不确定度(%)鲁棒PI普通PI -1.536-1.016 -0.693-0.388 -0.412-0.197 -0.20519.208 18.13024.026 -0.450-0.207
本节将对上述接入鲁棒自同步控制双馈风机的三机九节点系统进行大扰动试验。在靠近母线3的线路L1处施加三相短路,短路发生时刻为第3 s,仿真持续时间为12 s。取=8%并进行两组对照短路试验:第一组的短路持续时间为0.350 s,第二组则为0.398 s。
图12和图13分别给出了两组试验中自同步控制双馈风机及同步机SG1部分变量随时间的变化情况。可以看出,当短路持续时间为0.350 s时,采用两组PI参数的闭环系统均能保持稳定,并且二者的曲线动态较为相似。但当短路持续时间增大至0.398 s,采用鲁棒PI参数的闭环系统仍能保持暂态稳定;而采用普通PI参数的闭环系统直流母线电容电压 却急剧上升至1012数量级,这表明该系统已失稳。
却急剧上升至1012数量级,这表明该系统已失稳。
此外,表6给出了不同双馈风机暂态电抗不确定度下,使用两组PI参数的三机九节点系统能承受的最大三相短路持续时间。与3.3节单机无穷大系统的表3分析结论类似,表6数据显示,当变化时,采用鲁棒PI参数的闭环系统的最大短路持续时间均大于采用普通PI参数的系统。并且,当 时,采用普通PI参数的闭环系统在不加短路故障之前就已失稳(小扰动不稳定);当
时,采用普通PI参数的闭环系统在不加短路故障之前就已失稳(小扰动不稳定);当 时,采用两组PI参数的闭环系统均无法保持小扰动稳定。因此,综合上述大扰动试验可知,虽然本文所提的鲁棒PI参数设计隶属于线性控制设计范畴,但是闭环系统在平衡点周围动态性能的优化同样扩大了闭环系统的稳定域,提升了系统抵御大扰动的能力。值得说明的是,这种大扰动稳定性的改善并非必然,例如饱和、死区等与平衡点无直接关联的非线性特征可能会对系统的大扰动稳定性有决定性的影响。
时,采用两组PI参数的闭环系统均无法保持小扰动稳定。因此,综合上述大扰动试验可知,虽然本文所提的鲁棒PI参数设计隶属于线性控制设计范畴,但是闭环系统在平衡点周围动态性能的优化同样扩大了闭环系统的稳定域,提升了系统抵御大扰动的能力。值得说明的是,这种大扰动稳定性的改善并非必然,例如饱和、死区等与平衡点无直接关联的非线性特征可能会对系统的大扰动稳定性有决定性的影响。
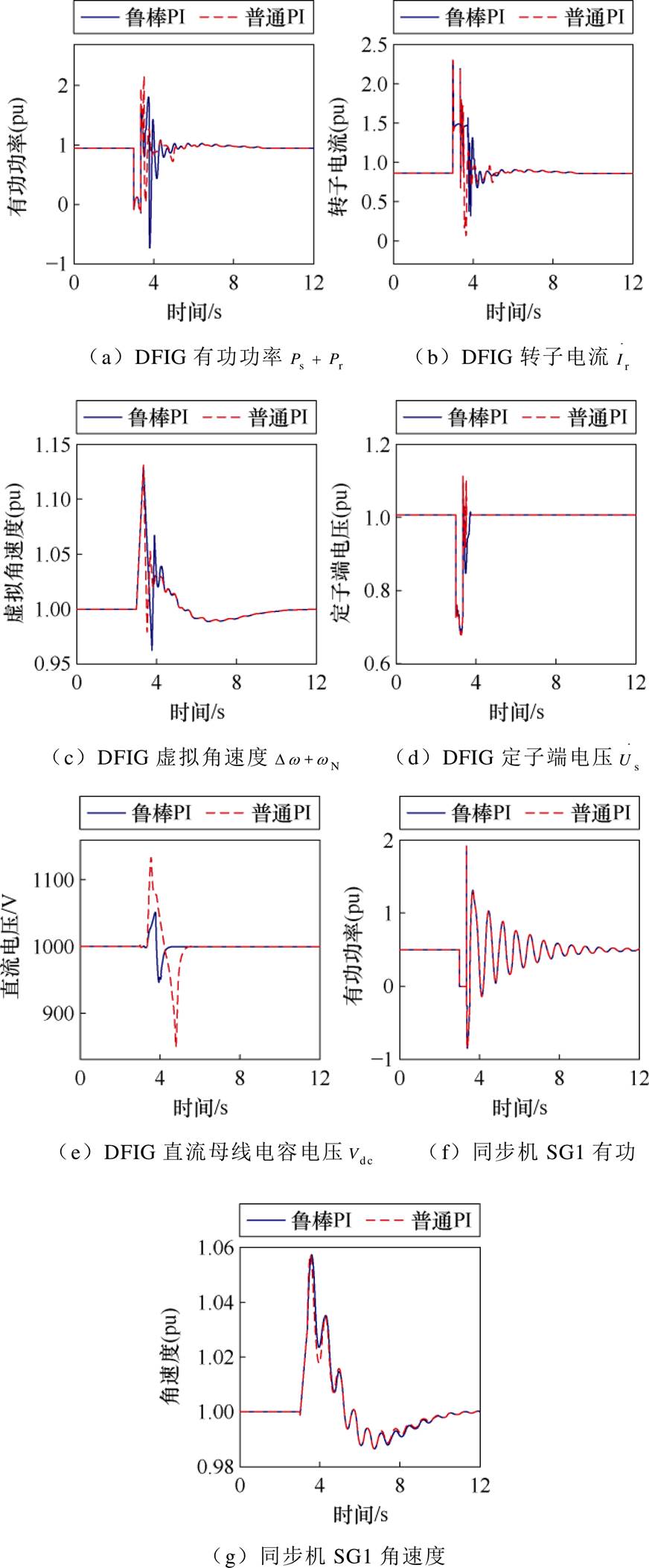
图12 三机九节点系统三相短路持续时间为0.350 s时自同步控制双馈风机及同步机各变量变化情况
Fig.12 Evolution of variables of DFIG and synchronous machine under self-synchronization control when subjected to a three-phase short-circuit fault lasting for 0.350 s in a three-machine nine-bus system
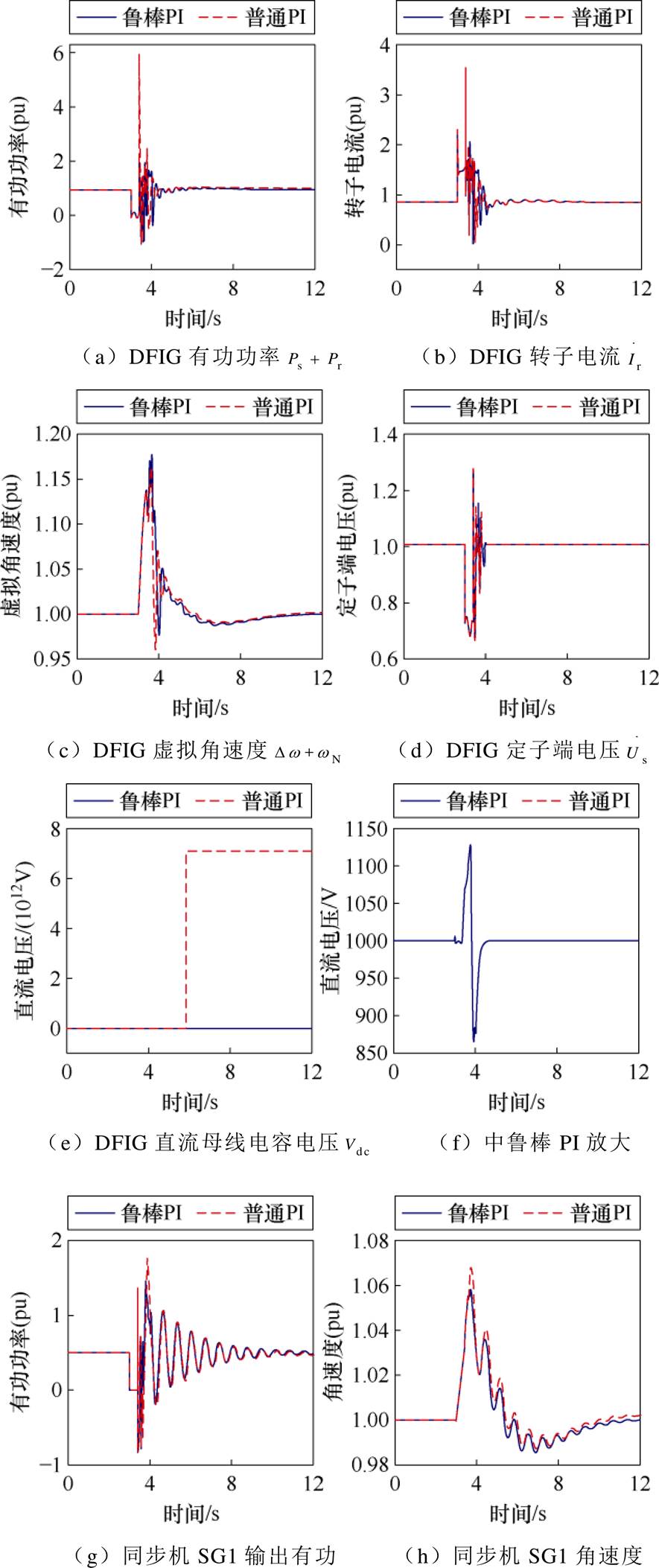
图13 三机九节点系统三相短路持续时间为0.398 s时自同步控制双馈风机及同步机各变量变化情况
Fig.13 Evolution of variables of DFIG and synchronous machine under self-synchronization control when subjected to a three-phase short-circuit fault lasting for 0.398 s in a three-machine nine-bus system
表6 三机九节点系统最大短路持续时间
Tab.6 Maximum short-circuit duration in a three-machine nine-bus system
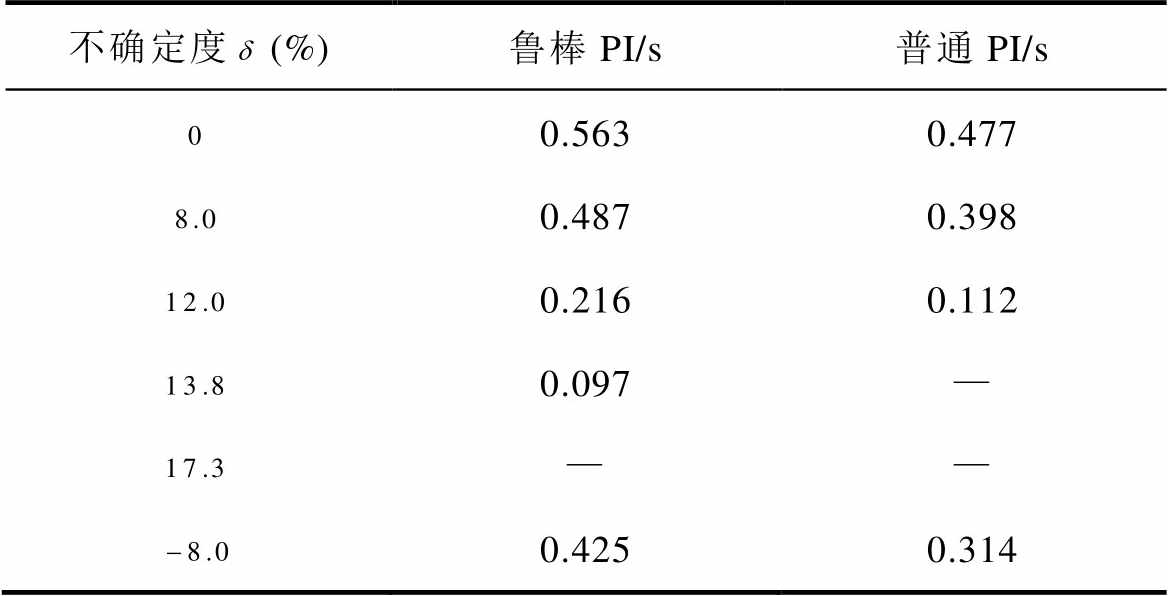
不确定度(%)鲁棒PI/s普通PI/s 0.5630.477 0.4870.398 0.2160.112 0.097— —— 0.4250.314
由本节仿真分析可知,本文所提双馈风机鲁棒自同步控制策略同样适用于多机电力系统。实际上,本文的鲁棒PI控制器参数设计方法可以适用于更复杂的多机系统,关键在于模型降阶以及常数矩阵的选取。
本文提出了一种基于暂态电动势控制的双馈风机鲁棒自同步控制策略。具体研究结论如下:
1)在双馈风机RSC上实施暂态电动势内环跟踪控制,可以使风机定子侧具有可控电压源特征。因此,如同控制VSC一样,可以通过有功外环来控制暂态电动势的相位而无功外环来控制暂态电动势的幅值,从而实现双馈风机的自同步控制。
2)双馈风机的参数不确定性确实会对自同步控制闭环系统的稳定性造成影响,本文所提鲁棒参数设计方法可以增强闭环系统对参数不确定性的免疫能力,提升系统的稳定性。
值得说明的是,本文所应用的鲁棒参数设计方法同样适用于多不确定性参数情况,设计过程并无本质不同。
附 录
双馈风机单机无穷大系统微分方程为
式中, 和
和 即正文中式(3);
即正文中式(3); 为角速度额定值,取
为角速度额定值,取 ;
; 为风机的机械部分;
为风机的机械部分; 为风机台数;
为风机台数; 为空气密度;
为空气密度; 为风速;
为风速; 为扇叶半径;
为扇叶半径; 为机械转矩额定值;
为机械转矩额定值; 为桨距角;
为桨距角; 为齿轮箱比率;
为齿轮箱比率; 为双馈风机定子角速度(rad/s);
为双馈风机定子角速度(rad/s); 所描述的为正文第2节中提出的自同步控制策略图3b;
所描述的为正文第2节中提出的自同步控制策略图3b; 为简化的下垂控制环节;
为简化的下垂控制环节; 为网侧直流电容功率平衡方程;
为网侧直流电容功率平衡方程; 为直流电容;
为直流电容; 为自同步控制策略中的无功外环;
为自同步控制策略中的无功外环; 与
与 为网侧控制环;
为网侧控制环; 为直流电容电压参考值;
为直流电容电压参考值; 为网侧无功参考值。
为网侧无功参考值。
双馈风机单机无穷大系统代数方程为
式中, 和
和 为定子阻抗上的欧姆定律;
为定子阻抗上的欧姆定律; 和
和 为转子电流的计算方程;
为转子电流的计算方程; 为自同步控制策略中的无功外环代数方程;
为自同步控制策略中的无功外环代数方程; 为自同步控制策略中
为自同步控制策略中 取为0;
取为0; 和
和 为网侧控制代数方程;
为网侧控制代数方程; 和
和 为并网线路阻抗上的欧姆定律;
为并网线路阻抗上的欧姆定律; 与
与 分别为并网线路的电阻与电抗;
分别为并网线路的电阻与电抗; 为无穷大电源的电压。
为无穷大电源的电压。
双馈风机单机无穷大系统输出方程为

其中
令 。
。
 为一个
为一个 的带有不确定度
的带有不确定度 的数值矩阵,其形式为
的数值矩阵,其形式为
第1行:
第2行:
第3行:
第4行:
第5行:
第6行:
第7行:

第8行:
 为一个
为一个 的带有不确定度的数值矩阵,其形式为
的带有不确定度的数值矩阵,其形式为
参考文献
[1] 郭小龙, 杨桂兴, 张彦军, 等. 构网型储能变流器并网系统SISO环路增益建模与重塑控制[J]. 电气技术, 2023, 24(2): 24-31, 51.
Guo Xiaolong, Yang Guixing, Zhang Yanjun, et al. Modeling and reshaping control of single input and single output loop gain of the grid-forming energy storage converter grid-connected system[J]. Electrical Engineering, 2023, 24(2): 24-31, 51.
[2] 李红, 梁军杨, 王振民, 等. 跟网型变换器的小扰动同步稳定机理分析与致稳控制[J]. 电工技术学报, 2024, 39(12): 3802-3815.
Li Hong, Liang Junyang, Wang Zhenmin, et al. Small signal synchronization stability analysis and improved control strategy for grid following converter[J]. Transactions of China Electrotechnical Society, 2024, 39(12): 3802-3815.
[3] 郝艺, 周瑀涵, 刘晨曦, 等. 含跟网型储能的新能源多馈入系统小扰动电压支撑强度分析[J]. 电工技术学报, 2024, 39(11): 3569-3580.
Hao Yi, Zhou Yuhan, Liu Chenxi, et al. Small- disturbance voltage support strength analysis for renewable multi-infeed system with grid-following energy storage[J]. Transactions of China Electro- technical Society, 2024, 39(11): 3569-3580.
[4] Harnefors L, Bongiorno M, Lundberg S. Input- admittance calculation and shaping for controlled voltage-source converters[J]. IEEE Transactions on Industrial Electronics, 2007, 54(6): 3323-3334.
[5] Dong Dong, Wen Bo, Boroyevich D, et al. Analysis of phase-locked loop low-frequency stability in three- phase grid-connected power converters considering impedance interactions[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 310-321.
[6] Cao Wenchao, Ma Yiwei, Yang Liu, et al. D-Q impedance based stability analysis and parameter design of three-phase inverter-based AC power systems[J]. IEEE Transactions on Industrial Elec- tronics, 2017, 64(7): 6017-6028.
[7] 董文凯, 杜文娟, 王海风. 弱连接条件下锁相环动态主导的并网直驱风电场小干扰稳定性研究[J]. 电工技术学报, 2021, 36(3): 609-622.
Dong Wenkai, Du Wenjuan, Wang Haifeng. Small- signal stability of a grid-connected PMSG wind farm dominated by dynamics of PLLs under weak grid connection[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 609-622.
[8] 谢震, 杨曙昕, 代鹏程, 等. 构网型全功率风电机组网侧变流器耦合分析及抑制策略[J]. 电工技术学报, 2023, 38(14): 3745-3758, 3768.
Xie Zhen, Yang Shuxin, Dai Pengcheng, et al. Grid- side coupling analysis and suppression strategy of grid-forming full-power wind turbines[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(14): 3745-3758, 3768.
[9] Matevosyan J, Badrzadeh B, Prevost T, et al. Grid- forming inverters: are they the key for high renewable penetration?[J]. IEEE Power and Energy Magazine, 2019, 17(6): 89-98.
[10] Matevosyan J, MacDowell J, Miller N, et al. A future with inverter-based resources: finding strength from traditional weakness[J]. IEEE Power and Energy Magazine, 2021, 19(6): 18-28.
[11] 刘欣, 郭志博, 贾焦心, 等. 基于序阻抗的虚拟同步发电机并网稳定性分析及虚拟阻抗设计[J]. 电工技术学报, 2023, 38(15): 4130-4146.
Liu Xin, Guo Zhibo, Jia Jiaoxin, et al. Stability analysis and virtual impedance design of virtual synchronous machine based on sequence impe- dance[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4130-4146.
[12] 潘子迅, 杨晓峰, 赵锐, 等. 不平衡电网下虚拟同步机的多模式协调策略[J]. 电工技术学报, 2023, 38(16): 4274-4285.
Pan Zixun, Yang Xiaofeng, Zhao Rui, et al. Multi- mode coordination control of virtual synchronous generator under unbalanced power grid[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(16): 4274-4285.
[13] 李东东, 朱钱唯, 程云志, 等. 基于自适应惯量阻尼综合控制算法的虚拟同步发电机控制策略[J]. 电力自动化设备, 2017, 37(11): 72-77.
Li Dongdong, Zhu Qianwei, Cheng Yunzhi, et al. Control strategy of virtual synchronous generator based on self-adaptive rotor inertia and damping combination control algorithm[J]. Electric Power Automation Equipment, 2017, 37(11): 72-77.
[14] 张辉, 王帆, 李晓强, 等. 虚拟同步发电机并联运行的阻抗匹配策略[J]. 电力系统自动化, 2018, 42(9): 69-74.
Zhang Hui, Wang Fan, Li Xiaoqiang, et al. Impedance matching strategy for parallel virtual synchronous generators[J]. Automation of Electric Power Systems, 2018, 42(9): 69-74.
[15] 涂春鸣, 谢伟杰, 肖凡, 等. 多虚拟同步发电机并联系统控制参数对稳定性的影响分析[J]. 电力系统自动化, 2020, 44(15): 77-86.
Tu Chunming, Xie Weijie, Xiao Fan, et al. Influence analysis of control parameters of parallel system with multiple virtual synchronous generators on stability[J]. Automation of Electric Power Systems, 2020, 44(15): 77-86.
[16] 胡文强, 吴在军, 孙充勃, 等. 基于VSG的储能系统并网逆变器建模与参数整定方法[J]. 电力自动化设备, 2018, 38(8): 13-23.
Hu Wenqiang, Wu Zaijun, Sun Chongbo, et al. Modeling and parameter setting method for grid- connected inverter of energy storage system based on VSG[J]. Electric Power Automation Equipment, 2018, 38(8): 13-23.
[17] 刘华志, 张祥宇, 李永刚, 等. 虚拟同步双馈风电机组的非线性联轴功率振荡抑制方法[J]. 中国电机工程学报, 2023, 43(4): 1449-1462.
Liu Huazhi, Zhang Xiangyu, Li Yonggang, et al. Nonlinear coupling power oscillation suppression method for virtual synchronous doubly-fed wind turbine[J]. Proceedings of the CSEE, 2023, 43(4): 1449-1462.
[18] 刘华志, 张祥宇, 李永刚, 等. 双馈风电场的虚拟多联轴耦合与功率振荡抑制技术[J]. 中国电机工程学报, 2023, 43(8): 3000-3013.
Liu Huazhi, Zhang Xiangyu, Li Yonggang, et al. Virtual multi shaft coupling and power oscillation suppression technology for doubly-fed wind farm[J]. Proceedings of the CSEE, 2023, 43(8): 3000-3013.
[19] 王德胜, 颜湘武, 贾焦心, 等. 永磁直驱风机基于虚拟同步技术的高、低电压连续故障穿越策略[J]. 中国电机工程学报, 2022, 42(6): 2164-2174.
Wang Desheng, Yan Xiangwu, Jia Jiaoxin, et al. High/low voltage continuous fault ride through strategy of PMSGs based on virtual synchronization technology[J]. Proceedings of the CSEE, 2022, 42(6): 2164-2174.
[20] 王东泽, 孙海顺, 黄碧月, 等. 基于虚拟同步控制的电压源型直驱风电机组并网稳定性分析[J]. 高电压技术, 2022, 48(8): 3282-3294.
Wang Dongze, Sun Haishun, Huang Biyue, et al. Analysis of grid-connected stability of voltage- source-type PMSG-based wind turbine based on virtual synchronous control[J]. High Voltage Engin- eering, 2022, 48(8): 3282-3294.
[21] 孙东阳, 孟繁易, 王南, 等. 基于反步自适应准谐振控制的双馈风机次同步振荡抑制策略[J]. 电工技术学报, 2023, 38(9): 2375-2390, 2434.
Sun Dongyang, Meng Fanyi, Wang Nan, et al. DFIG sub-synchronous oscillation suppression strategy based on backstepping adaptive quasi-resonant control[J]. Transactions of China Electrotechnical Society, 2023, 38(9): 2375-2390, 2434.
[22] Verma P, Seethalekshmi K, Dwivedi B. A self- regulating virtual synchronous generator control of doubly fed induction generator-wind farms[J]. IEEE Canadian Journal of Electrical and Computer Engin- eering, 2023, 46(1): 35-43.
[23] Sun Peng, Xu Hao, Yao Jun, et al. Dynamic interaction analysis and damping control strategy of hybrid system with grid-forming and grid-following control modes[J]. IEEE Transactions on Energy Conversion, 2023, 38(3): 1639-1649.
[24] 高澈, 田新首, 李琰, 等. 基于运行状态评估的双馈风机自适应虚拟同步发电机控制[J]. 电网技术, 2018, 42(2): 517-523.
Gao Che, Tian Xinshou, Li Yan, et al. Adaptive virtual synchronous generator control of DFIG based on operation state evaluation[J]. Power System Technology, 2018, 42(2): 517-523.
[25] 迟永宁, 雷雨, 季笑庆, 等. 虚拟同步双馈风机对同步机作用路径及低频振荡影响分析[J]. 现代电力, 2021, 38(3): 237-247.
Chi Yongning, Lei Yu, Ji Xiaoqing, et al. Analysis of impact of DFIG-based wind turbines with virtual synchronous control on the action path and low frequency oscillation of synchronous generator[J]. Modern Electric Power, 2021, 38(3): 237-247.
[26] 康积涛, 陈博, 杨丰波. 双馈风机转子侧逆变器虚拟同步化控制策略研究[J]. 电工技术, 2020(4): 21-24, 27.
Kang Jitao, Chen Bo, Yang Fengbo. Research on virtual synchronization control strategy of rotor-side inverter of DFIG[J]. Electric Engineering, 2020(4): 21-24, 27.
[27] 张祥宇, 沈文奇, 黄弘扬, 等. 基于功率耦合的双馈风机并网系统同步控制技术[J]. 电力自动化设备, 2022, 42(12): 43-49.
Zhang Xiangyu, Shen Wenqi, Huang Hongyang, et al. Synchronization control technology of grid-connected DFIG system based on power coupling[J]. Electric Power Automation Equipment, 2022, 42(12): 43-49.
[28] 沈雅琦, 马静, 李鹏冲, 等. 含附加能量支路的虚拟同步双馈风机次同步振荡抑制策略[J]. 电力系统自动化, 2022, 46(23): 83-93.
Shen Yaqi, Ma Jing, Li Pengchong, et al. Sub- synchronous oscillation suppression strategy for virtual synchronous DFIG-based wind turbines with additional energy branch[J]. Automation of Electric Power Systems, 2022, 46(23): 83-93.
[29] 张英敏, 吴谨轶, 江琴, 等. 基于风储联合系统的受端电网黑启动技术及协调恢复策略[J]. 工程科学与技术, 2023, 55(2): 70-83.
Zhang Yingmin, Wu Jinyi, Jiang Qin, et al. Receiving-end power grid black start technology and coordinated restoration strategy based on wind- storage combined system[J]. Advanced Engineering Sciences, 2023, 55(2): 70-83.
[30] 魏林君, 叶华, 迟永宁. 基于状态重构的构网型风机与储能系统联合频率支撑控制策略[J]. 高电压技术, 2023, 49(12): 5095-5104.
Wei Linjun, Ye Hua, Chi Yongning. Frequency response coordinated control strategy between grid- forming wind turbine and energy storage based on state reconstruction[J]. High Voltage Engineering, 2023, 49(12): 5095-5104.
[31] 安垚. 时滞随机分布系统的跟踪控制及鲁棒性研究[D]. 扬州: 扬州大学, 2013.
An Yao. Research on tracking control and robustness of stochastic distributed systems with time delay[D]. Yangzhou: Yangzhou University, 2013.
Robust Self-Synchronization Control Strategy for Doubly-Fed Induction Generator Based on Transient Electromotive Force Control
Abstract The grid-side converter (GSC) of the doubly-fed induction generator (DFIG) is directly connected to the grid. Theoretically, virtual synchronous generator (VSG) control can be applied to GSC. However, it is difficult to control the total active output of DFIG through GSC directly, and establishing the “active power-phase angle” relationship between the total active output of DFIG and GSC potential is challenging. The current academic community's implementation of self-synchronization control (VSG control) on the rotor-side converter (RSC) of DFIG ignores the influence of fan dynamics on self-synchronization control. This paper proposes a robust self-synchronization control strategy for DFIG based on transient electromotive force control. It can provide synchronization support to the power grid while ensuring the stability of the closed-loop control system. Furthermore, a robust PI parameter design method for self-synchronization control is proposed.
Firstly, by analogy with traditional synchronous generators, a self-synchronization control strategy diagram considering the dynamic characteristics of the DFIG excitation system is proposed to control the RSC output voltage. The proposed self-synchronization control strategy needs to use the transient reactance parameters of DFIG to obtain measured values of transient reactance. Accordingly, An open-loop model of the system is established, and a robust PI parameter design method for self-synchronization control is proposed for the open-loop system, which can effectively solve the stability problem of the closed-loop control system in the presence of uncertainty in the DFIG parameters.
Simulation results show that after disconnecting the infinite power switch in a single machine infinite power supply system with load, the system can still operate stably even after losing the infinite power supply. The virtual angular velocity of the self-synchronization control DFIG ultimately stabilizes at 0.997(pu), and the steady-state output active power increment is about 0.014 7(pu) Therefore, the droop coefficient of the self-synchronization control can be estimated to be 0.014 7/0.003=4.9. The average output active power change within 50 ms after cutting off the power supply is about 0.014 0(pu), and the average frequency change rate is about 0.004 5(pu)/s. The inertia time coefficient of self-synchronization control is estimated at about 0.014 0/0.004 5/2=1.56. The estimated results are consistent with the self-synchronization control parameters D and H set in the simulation. Then, small and large disturbance tests are conducted on a single-machine infinite bus DFIG system with self-synchronization control using different PI parameters. Under the small disturbance test, as the uncertainty of DFIG transient reactance increases, the maximum characteristic root of the real part of the closed-loop system begins to move towards the right half plane of the complex plane, and the system’s stability gradually deteriorates. However, the stability degradation rate of closed-loop systems using ordinary PI parameters is faster. When the uncertainty is about 20%, the system is already unstable with small disturbances, while the closed-loop system using robust PI parameters is still stable. In the large disturbance test, when the short-circuit duration is 0.1 s, the closed-loop system using two sets of PI parameters can maintain stability. When the duration of the short circuit increases to 0.114 s, the closed-loop system using robust PI parameters can still maintain transient stability, while the closed-loop system using ordinary PI parameters has become unstable. In addition, the variations are similar in the disturbance tests of the three-machine and nine-node system.
The following conclusions can be drawn. (1) Implementing transient electromotive force inner loop tracking control on the RSC of DFIG can provide controllable voltage source characteristics to the stator side of DFIG. Therefore, just like controlling the voltage source converter, the phase angle of transient electromotive force can be controlled through the active power outer loop, while the amplitude of transient electromotive force can be controlled through the reactive power outer loop. Therefore, self-synchronization control of DFIG is achieved. (2) The proposed robust parameter design method can enhance the immune ability of the closed-loop system to parameter uncertainty and improve system stability.
keywords:Grid-following, grid-forming, self-synchronization, doubly-fed induction generator (DFIG), robust control, transient electromotive force
DOI: 10.19595/j.cnki.1000-6753.tces.240101
中图分类号:TM315
中国南方电网有限责任公司科技资助项目(0000002022030101XT00031)。
收稿日期 2024-01-16
改稿日期 2024-04-26
黄 达 男,2000年生,硕士研究生,研究方向为新型电力系统稳定与控制。E-mail: huangda@whu.edu.cn
柯德平 男,1983年生,博士,副教授,研究方向为电力系统稳定与控制、电力系统经济运行。E-mail: kedeping@whu.edu.cn(通信作者)
(编辑 崔文静)