 (1)
(1)
摘要 针对有限集模型预测控制算法在电机参数失配时导致系统可靠性下降的问题,提出一种基于超局部模型的永磁同步电机无模型预测电流控制策略。然而,在以电流误差计算的方法对超局部模型参数进行辨识的过程中,存在电流更新停滞的问题,导致系统性能下降。因此,该文针对此问题提出了一种基于功率因数角计算的无模型预测电流控制策略,详细分析了电流更新停滞问题出现的机理,并提出了一种消除电流更新停滞的方法。仿真与实验结果显示,所提方法能够在电机参数未知的前提下,抑制电流更新停滞来实现电机的平稳运行。
关键词:永磁同步电机 预测控制 超局部模型
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)凭借其功率密度高、效率高、易于控制等优势被广泛应用于工业生产、船舶推进以及电动汽车等领域[1-4]。因此,PMSM控制算法成为了国内外的研究热点。其中,模型预测控制算法由于其控制方式易实现、控制性能好的特点被应用于电机调速驱动和电力电子领域[5-8]。
在PMSM预测控制中,有限集模型预测电流控制(Finite Control Set Model Predictive Current Control, FCS-MPCC)算法在电机离散数学模型的基础上,采样当前时刻的电流值,通过价值函数在有限控制集内选择出最优控制策略实现对电机的控 制[9-12]。然而,FCS-MPCC算法十分依赖于对被控对象建模的准确性,在实际运行中电机铁磁材料的饱和效应、温升导致绕组电阻和转子磁链等参数的变化都会降低建模精度,且在部分电机驱动控制的场合中,电机参数不便于测量而未知,以上因素都使得该算法因为参数失配而导致控制性能下降[13-14]。
为了能够解决驱动控制系统中由于参数变化而引起控制性能下降的问题,部分研究者通过对FCS- MPCC算法的预测误差进行分析,讨论不同参数误差对于预测电流产生的影响,为提升FCS-MPCC算法的预测精度提供了详细的指导[15]。另外,无模型预测电流控制(Model-Free Predictive Current Control, MFPCC)算法也逐渐开始被一些研究者提出。MFPCC算法主要有三种控制策略:预测校正策略、完全无模型预测控制策略和基于超局部模型的无模型预测控制策略[16]。
预测校正策略是通过估计校正因子来补偿预测误差。当前时刻的采样电流值加电流误差值来获得预测电流,文献[17]中电流误差值来源于历史多个相邻周期的电流采样值的差值。但为了避免电流误差值较长时间没有更新的情况,其在进行电流预测计算时,算法中为电流误差值设计了一个系数来补偿下一个采样周期的预测,降低更新停滞的影响。
在完全无模型预测控制策略中,将逆变器更新开关状态时的电流变化值记录在查询表中,通过采样电流值与电流误差值来预测未来时刻的电流。在文献[18]中通过在一个周期内进行两次电流采样来提高电流误差值的更新频率。该方法在每个采样周期内进行两次电流采样,然而在逆变器开关状态切换前后的小段时间内进行电流采样会导致采样误差较大,使得电机绕组中出现不理想的电流尖峰。另外,由于同一周期内只能更新查询表中一种开关状态对应的电流误差值,而其他所对应的电流误差值可能在长时间内没有进行更新,这就会出现电流更新停滞的现象,从而导致对电流的控制性能下降。文献[19]中在每个周期内仅进行单次电流采样,以避免在功率器件执行开关动作的时刻进行电流采样。针对电流更新停滞,该方法设定在固定的若干周期内,如果某个开关状态的电流误差值没有更新,会将该误差值所对应的开关状态直接作用于逆变器上跳出电流停滞并及时更新电流误差值。然而,该方法中强制施加一个开关状态给逆变器会导致电流的巨大变化。上述文献中在一个离散周期内只能更新一个开关状态所对应的电流误差值。文献[20]中,通过对当前时刻的电压矢量状态进行分析,根据电压矢量的特点将所有开关状态划分为六种序列类型,每个序列下对其他开关状态所对应的电流误差值进行重构,实现在一个周期内对查询表中全部开关状态所对应的电流误差值进行更新,直接避免更新停滞的情况。但其在互为相反的电压矢量和零矢量的序列中,无法准确重新构建其他电流误差值,会降低电流的预测精度。
对于基于超局部模型的无模型预测控制策略,其主要思想是通过建立超局部模型来替代电机精确的数学模型,通过辨识集总参数来代替电机参数,因此该方法的核心在于对超局部模型的集总参数进行辨识。通常对于集总参数的辨识方法有观测器以及代数参数辨识方法。在文献[21]中,首先对永磁同步电机dq轴电流方程建立超局部模型,随后通过设计扩展卡尔曼滤波观测器来对集总参数进行辨识。该控制方法的结构简洁有效,然而在设计扩展卡尔曼滤波观测器时涉及到了多个矩阵的计算,会增加系统的计算负担。文献[22]中同样也使用了扩展卡尔曼滤波观测器来对超局部模型参数进行辨识。设计了一种强跟踪扩展卡尔曼滤波观测器来提高对实际系统状态的精确跟踪。文献[23]则是使用扩展状态观测器进行参数辨识,需要对观测器进行稳定性分析。辨识超局部模型集总参数的第二种方法则是通过代数计算来获得,相较于观测器则更容易实现。文献[24]中将超局部模型转换为时域方程,得到集总参数的表达式,然后经过拉氏反变化得到一个关于集总参数的积分表达式,通过求取该积分表达式的近似值来计算集总参数。但该方法中没有讨论如何确定超局部模型输入项的系数的取值。在文献[25]中则是通过将连续若干周期采样的电流值依次相减得到误差值,然后将电流误差值以超局部模型来表示进行代数计算,最后得到超局部模型的集总参数用于电流预测。该方法简单易实现,但是用于整流并网,其频率固定在50 Hz,若将该方法用于PMSM变频控制系统中会出现电流更新停滞现象,尤其是在低频区域,导致电机绕组中电流出现突变。需要说明的是,文献[25]的方法出现类似于完全无模型预测控制策略中的电流更新停滞导致的电流突变的现象,但是在文献[25]中并没有查询表来记录每个状态所对应的电流误差值,这里的电流更新停滞产生的机理与文献[17-20]中的不同。
为了解决上述以电流误差计算辨识超局部模型参数中电流更新停滞的问题,本文提出了永磁同步电机基于功率因数角计算的无模型预测电流控制(Power-Factor MFPCC, PF-MFPCC)策略。首先,分析以超局部模型为核心的基于电流误差的无模型预测电流控制(Current-difference Detection MFPCC, CD-MFPCC)算法中电流更新停滞现象产生的机理。其次,提出一种基于功率因数角计算消除电流更新停滞现象的方法,能够在电机运行在低频时控制电流避免出现过大的尖峰。最后,通过仿真和实验验证了所提方法的有效性。
传统FCS-MPCC为了获得当前时刻电机的最优电压矢量,需要准确建立PMSM的数学模型并对其离散化,根据离散之后的数学模型来预测下一时刻的电流值。
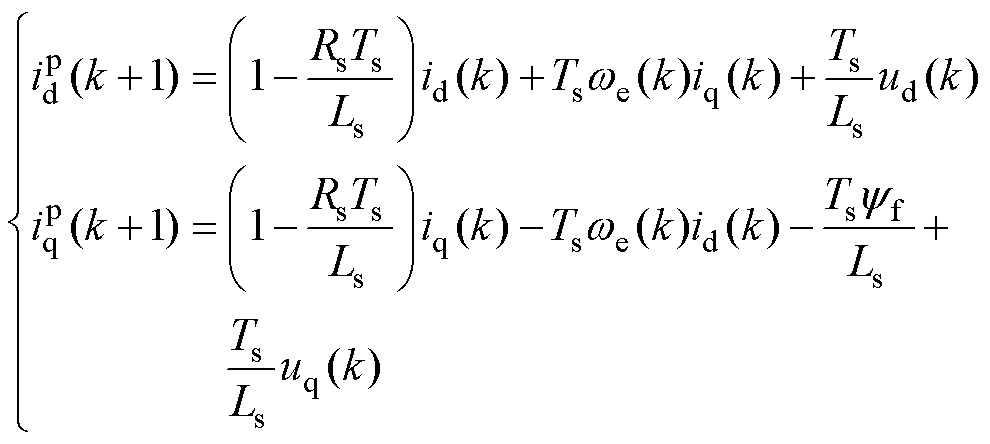
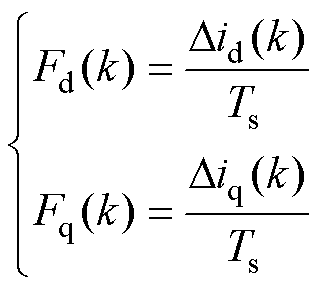
假设三相PMSM转子磁场在空间呈正弦式分布,忽略磁饱和效应、损耗等因素,FCS-MPCC模型[26]为
(1)
式中,Ts为预测步长;上标“p”表示模型预测值;ud、uq、id、iq分别为定子绕组在d、q轴的电压和电流;Rs为定子绕组电阻; 为电机转子电角速度;
为电机转子电角速度; 为转子磁链;Ls为定子电感标称值;对于表贴式永磁同步电机则有Ld=Lq=Ls,其中,Ld和Lq分别为定子d、q轴电感。
为转子磁链;Ls为定子电感标称值;对于表贴式永磁同步电机则有Ld=Lq=Ls,其中,Ld和Lq分别为定子d、q轴电感。
通过电机模型得到dq轴电流在k+1时刻的预测值之后,以代价函数在七种电压矢量开关组合中选择出最优电压矢量开关,代价函数的形式为
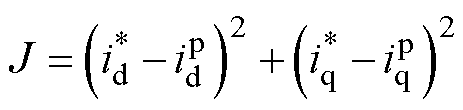 (2)
(2)
式中, 、
、 分别为d、q轴电流的参考值。
分别为d、q轴电流的参考值。
MFPCC算法能够在不依赖电机数学模型的基础上实现对电机的控制。本文中采用基于超局部模型的MFPCC算法来代替传统FCS-MPC实现调速控制。
超局部模型的主要思路是对于被控对象进行局部建模,设计集总参数来代替原来的电机参数,通过模型的输入输出来实时更新集总参数。PMSM的超局部模型[27]可以表示为
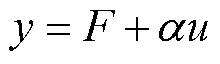 (3)
(3)
式中, 为模型输入增益,是一个非物理参数;F为超局部模型集总参数,包含了系统的结构参数、未建模部分以及扰动;u为模型输入;y为模型输出。
为模型输入增益,是一个非物理参数;F为超局部模型集总参数,包含了系统的结构参数、未建模部分以及扰动;u为模型输入;y为模型输出。
PMSM的超局部模型在dq轴上的离散形式可以表示为
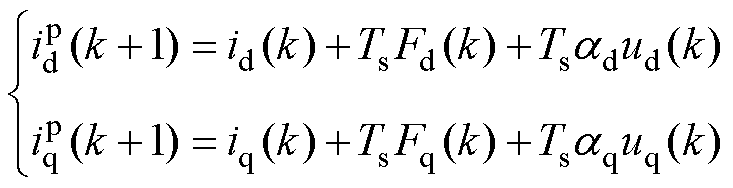 (4)
(4)
式中,Fd、Fq和ad、aq分别为dq轴上的集总参数与输入增益。
在建立电机的超局部模型之后,需要对超局部模型参数进行辨识,在得到准确的集总参数之后就能够进行电流预测。本文通过记录多个周期内dq轴电流并进行代数计算,得到超局部模型参数F和。
依次采样第k-2、k-1和k周期内的dq轴电流,则第k-1和k周期的dq电流变化值分别为
 (5)
(5)
 (6)
(6)
式中,Did(k-1)、Diq(k-1)和Did(k)、Diq(k)分别存储在查询表中并对其进行在线更新。
通过式(4),电流的变化值也可以表示为
 (7)
(7)
 (8)
(8)
假设采样频率足够高,参数F在连续的几个周期内近似相等[21]。将式(8)减去式(7),则可以得到输入增益为
 (9)
(9)
将式(9)代入式(8)可得
 (10)
(10)
将式(9)和式(10)代入式(4)则能够预测出k+1时刻的电流。
在文献[16]中,提到电流停滞的问题,如图1所示。电流停滞发生时,逆变器的开关状态序号Sx保持不变,例如,图1中Sx=S6,此时等效于在电机绕组中施加直流电压,从而导致相电流会持续增大或减小,而Did与Diq的更新基本保持不变,使得dq轴电流持续上升或下降。在2.2节提出的方法中,需要记录k-2和k-1时刻的dq轴电流,将电流误差存放在查询表中并进行实时更新。
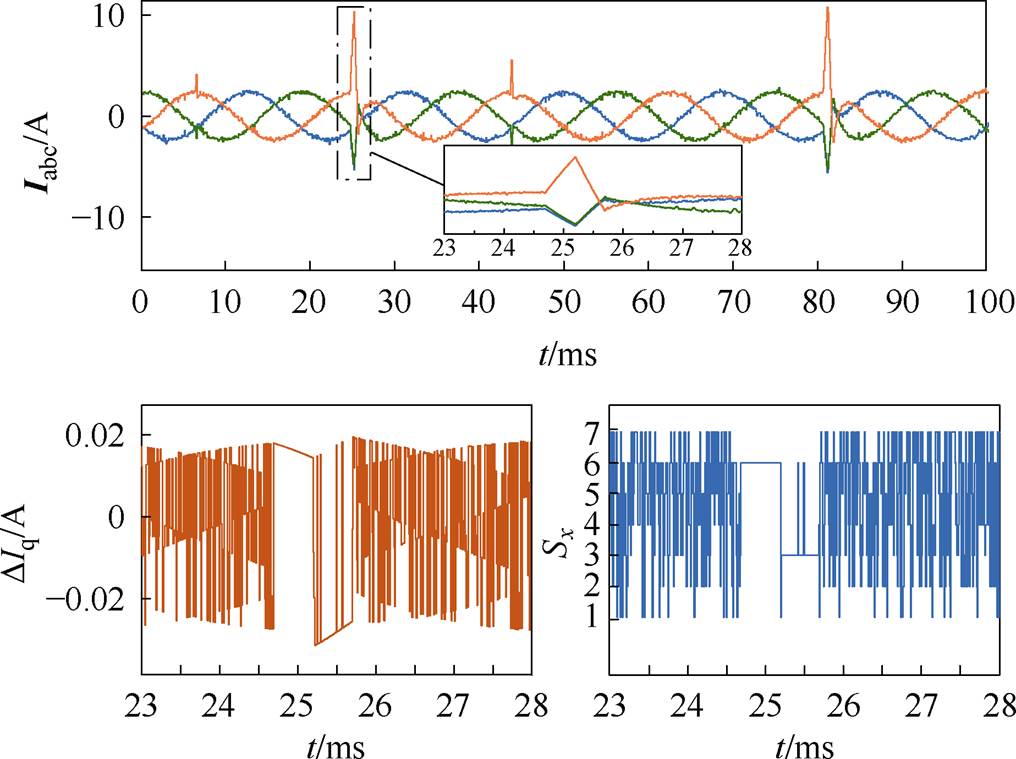
图1 电流停滞现象
Fig.1 The phenomenon of current stagnation
然而,若查询表中的电流误差发生更新停滞,会导致在一段时间内相同的电压矢量一直作用。图2为实际离散系统中电流采样和电压矢量作用示意图。在电流更新停滞发生时,逆变器开关状态Sx在若干周期内会保持不变。
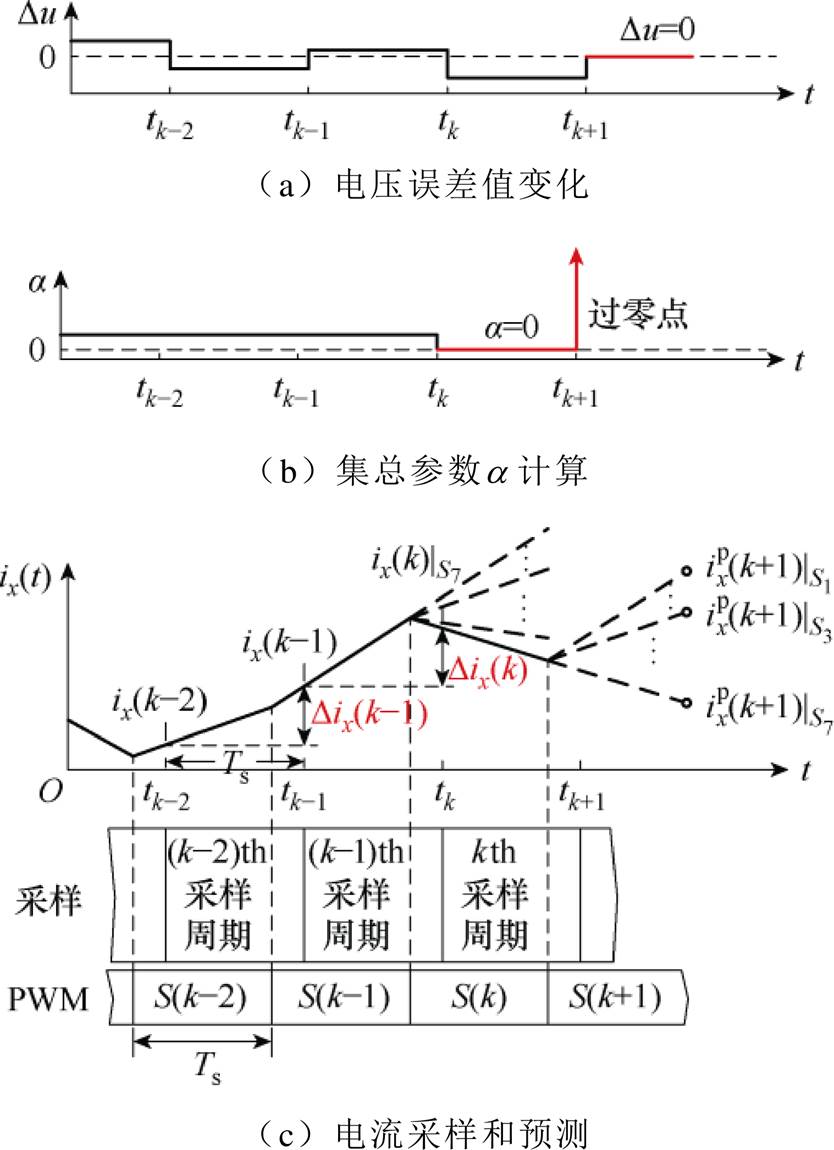
图2 电流停滞分析
Fig.2 The analysis of current stagnation
图2a中,Du表示式(9)等号右边分母中电压误差值;图2c中,ix(k-2)、ix(k-1)和ix(k)以及S(k-2)、S(k-1)和S(k)分别为第k-2、k-1和k周期内的电流采样值和开关状态。
发生电流更新停滞的一种情况在于连续的若干采样周期内,在电流的变化幅度较小时,即使在不同的开关状态作用下电流的变化不同,但采样所记录下的电流误差值Dix(k-1)和Dix(k)基本相等。电机绕组中的电流在不同的开关状态下有着不同的响应,图2c中第k-2、k-1和k周期内的开关状态均不相同,但是在第k-1和k周期内计算出的电流误差值Did(k-1)、Diq(k-1)和Did(k)、Diq(k)相同,该情况下式(9)计算得到的a 的值为零。
电流误差在相邻的两个周期里相同,发生电流更新停滞,如图1中Diq在25 ms时的波形,式(10)将变为
 (11)
(11)
则式(4)中预测的电流 和
和 的值会按照前几个周期相同的电流误差值增长或减小。
的值会按照前几个周期相同的电流误差值增长或减小。
由于电流变化幅度较小,在接下来的若干周期内经过价值函数选出的最优开关状态也会相同。在之后虽然电流变化幅度较小,但随着同一开关状态作用的时间积累,电流也会有很大幅度的改变,也就是电流尖峰的前半部分。此时,采样电流值与刚发生电流更新停滞的时刻相差较大,那么价值函数会立即选出一个最优开关状态迫使电流回归正常,即电流尖峰的后半部分。
连续三个周期内如果作用于逆变器的开关状态保持相同,会使得两个相邻周期电压差值为零,如图2a中t(k+1)时刻的Du的波形。此时式(9)出现过零点现象,则参数a 的值会急剧增加,如图2b所示,该状况下绕组中的电流则会出现如图1所示的明显尖峰。在电机工作在低频轻载时,电流变化幅度较小,且谐波较多,也会加剧电流突变的情况。若连续多个周期内发生图2c的情况,则电流更新停滞会使得电流预测的精度下降,从而使得控制系统的稳定性下降。
由于电机绕组可以等效为RL模型,当逆变器的开关状态发生更新停滞时,会持续给电机绕组施加大小、方向不变的电压,此时相电流会近似于直流电流。电路回路中的阻抗基本只有电阻,电感对于电流的阻碍作用减弱,所以相电流会持续增大或减小,这样会导致电机转矩产生巨大的脉动。因此,需要针对电流更新停滞现象进行抑制,本文提出了一种基于功率因数角的电流更新停滞抑制方法,该方法控制结构如图3所示。
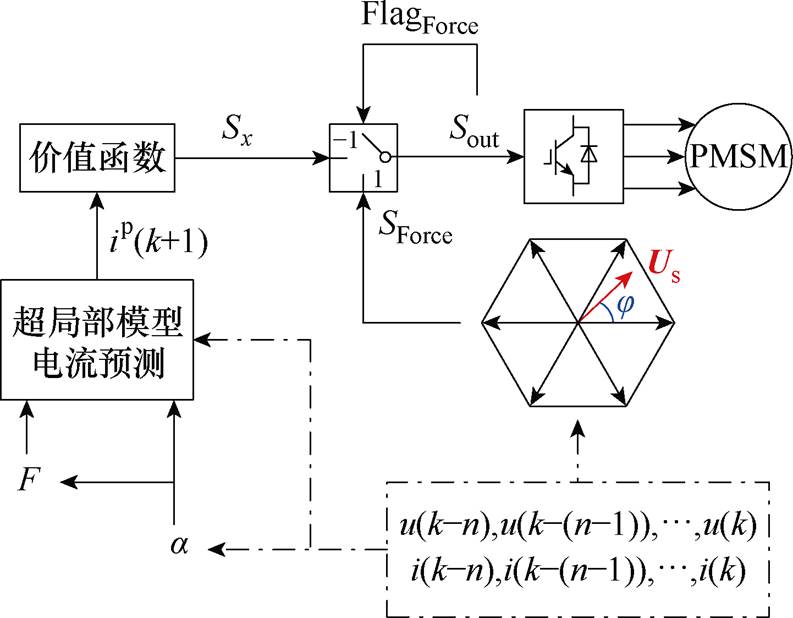
图3 PF-MFPCC算法结构
Fig.3 Block diagram of the system with the PF-MFPCC
2.4.1 电流更新停滞检测
在预测控制的过程中,通过式(2)的价值函数计算出最优电压矢量开关状态Sx,而在电流更新停滞出现时,其特点在于连续多个周期的逆变器开关状态不变。在控制系统中连续记录r个周期的开关状态序号,如果变量Flag的取值等于r,则代表着逆变器开关状态处于停滞状态。当控制系统判断出电流更新停滞的情况出现时,逆变器的开关状态Sout需要被强制更新为SForce,以避免电机转矩出现更大程度的脉动。
2.4.2 功率因数角计算
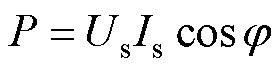
根据当前电机运行工况,计算当前时刻参考电压矢量所在扇区,以该扇区的开关状态作为被强制更新的最优开关状态SForce并作用于逆变器。功率因数角如图4所示。
图4 功率因数角
Fig.4 Power factor angle
图4中,j 为功率因数角;d 与q 分别为电流矢量与电压矢量和d轴的夹角。根据电路理论可知,有功功率P、无功功率Q以及与视在功率Z的关系分别为
 (12)
(12)
 (13)
(13)
 (14)
(14)
式中,Us和Is分别为电压矢量与电流矢量。
根据电机理论与式(12)~式(14),可得
 (15)
(15)
式中,ID和IQ分别为Is在d轴和q轴的分量;UD和UQ分别为Us在d轴和q轴的分量。
在发生电流更新停滞时,为了计算出实时的参考电压矢量,式(15)中的ID和IQ取值分别为d、q轴反馈电流。另外,逆变器的开关状态也会发生停滞,在检测到电流更新停滞时记录下了停滞开关状态,则可以计算出当前时刻d、q轴上的电压分量ud(k)和uq(k),令UD和UQ分别等于ud(k)和uq(k)。
2.4.3 参考电压矢量所在扇区确定
参考电压矢量位置计算如图5所示。在图5中,分别定义电流更新停滞开始时刻为k时刻,强制开关状态更新为k+m时刻。假设dq(k)轴为k时刻的转子位置,dq(k+m)轴为k+m时刻的转子位置。由于算法中id=0,则参考电流矢量Is全部投影在q轴上。
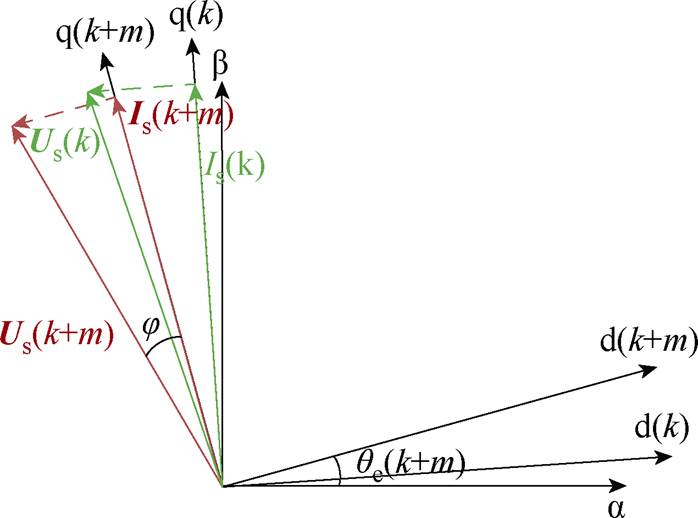
图5 参考电压矢量位置计算
Fig.5 The calculation of position reference voltage vector
在电机正常平稳运行时,参考电流矢量Is(k)跟随dq轴转动相同的角度到达Is(k+m),当时间间隔足够短时,电机的功率因数角基本不变,所以参考电压矢量也转动相同的角度,由Us(k)转动至Us(k+m)。然而,发生电流更新停滞现象时,电压矢量将一直保持在Us(k)没有变化,但是在停滞多个周期之后,理想中的电压矢量应该停留在Us(k+m)的位置,所以可以通过计算功率因数角j 来获得参考电压矢量的位置qsum,有
 (16)
(16)
式中,qe为电角速度。由于dq轴正交,所以需要加p/2。
在得到参考电压矢量位置角qsum之后,根据基本数学运算,可以计算出六个非零基本电压矢量中与Us(k+m)距离最近的矢量,将该矢量用于强制更新逆变器的开关状态。上述采用功率因数角抑制电流更新停滞的PF-MFPCC方法流程如图6所示。
在Matlab/Simulink中,按照文献[10]中提到的传统FCS-MPCC算法搭建了仿真模型,并在该模型上分别按照文献[21]和图6搭建了CD-MFPCC和PF-MFPCC的仿真模型,将三种算法的仿真进行比较讨论。仿真中永磁同步电机的主要参数见表1。仿真中设定速度参考值为750 r/min,q轴电流参考值由转速PI输出给定。
在CD-MFPCC算法的基础上,针对电流更新停滞状况提出了PF-MFPCC算法。图7a为在CD-MFPCC算法下的相电流波形,可以看到,在电机的稳态运行过程中,电流会出现如图1所示的电流尖峰。在所提出的PF-MFPCC算法中,需要先对是否产生电流更新停滞进行判断:如图6中使用变量Flag进行记录,在图7b中定义r=5,即Flag的值等于5时判断系统发生了电流更新停滞,此时会将逆变器开关状态强制更新为SForce,强制更新的时刻如图7c所示。
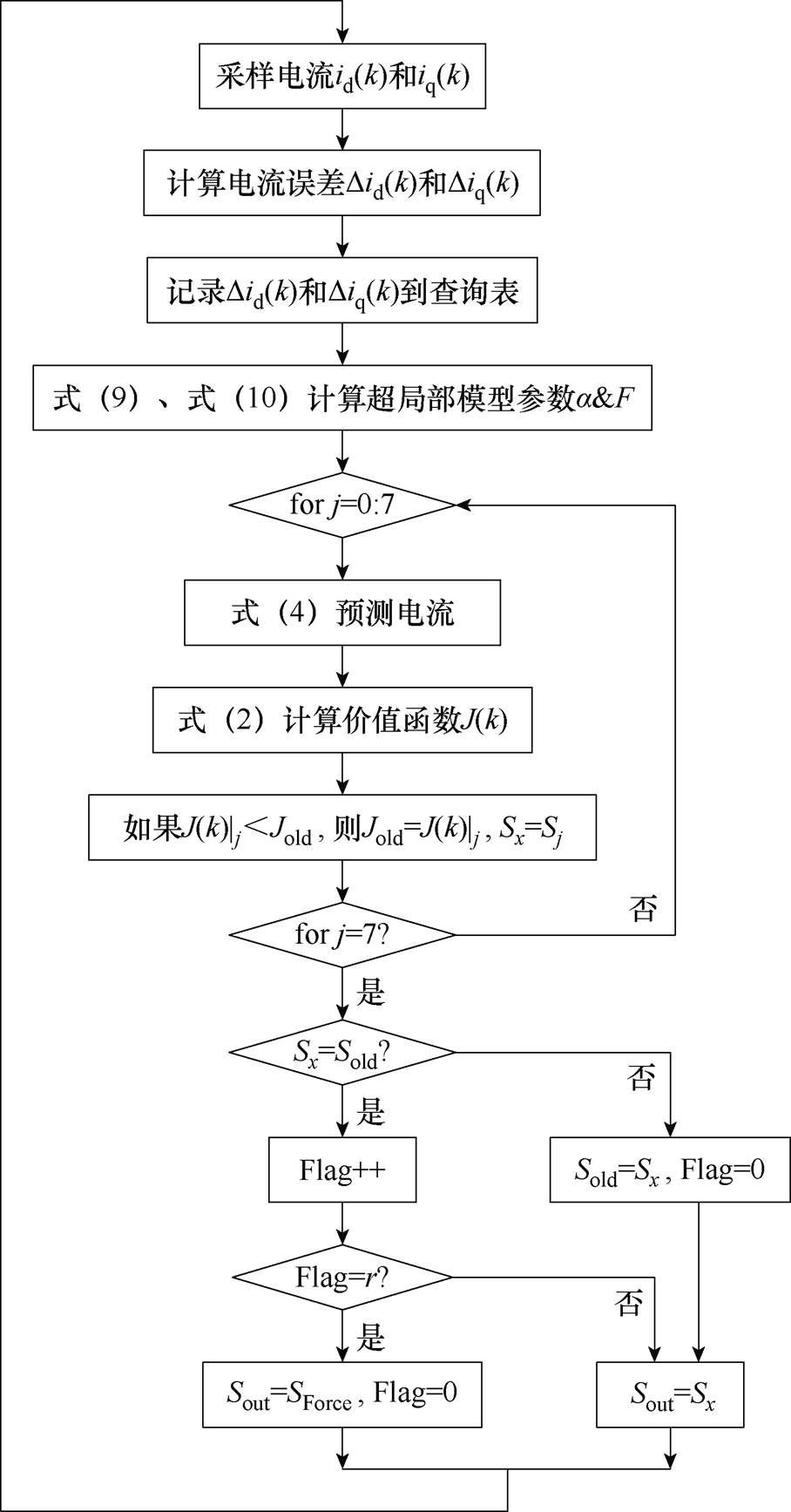
图6 PF-MFPCC系统仿真模型
Fig.6 Flowchart of the PF-MFPCC
表1 电机主要参数
Tab.1 Main parameters of PMSM

参 数数 值 额定转速Nr/(r/min)3 000 转子极对数np4 等效定子电阻Rs/W2.88 等效定子电感Ls/H0.002 4 永磁体磁链yf/Wb0.070 7
PF-MFPCC算法在选择电压矢量时是从六个非零矢量中选择与参考电压矢量Us(k+m)最相近的,此处为近似处理。当r的值过小时,作用于逆变器的开关状态大部分来自于PF-MFPCC算法,会导致近似处理带来的误差不断积累,致使电流谐波较大。r的取值也不可过大,因为r过大会使得电流已经出现了明显的尖峰时才对逆变器强制更新开关状态,其不具有抑制效果,图1关于Sx的波形中,Sx=S6的周期大约为20个,所以r的取值不可以大于20并且要比20小的多,因此r=5的取值是在一个范围、根据实际控制性能选择的值。
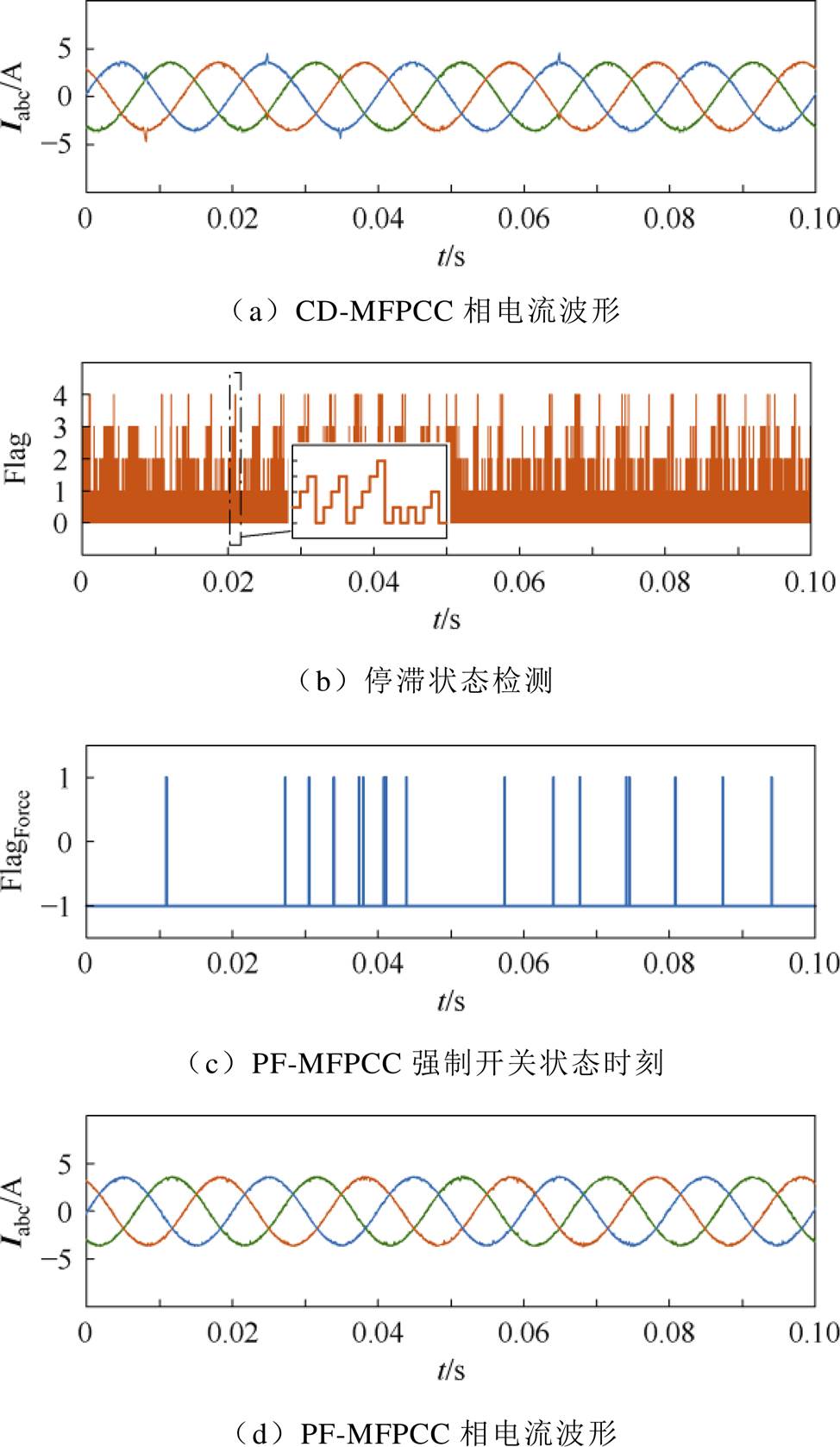
图7 CD-MFPCC电流更新停滞与PF-MFPCC电流更新停滞抑制对比波形
Fig.7 CD-MFPCC current stagnation and PF-MFPCC current stagnation suppression
图7中FlagForce的值为1时代表系统判断出当前时刻处于电流更新停滞状态并进行开关状态强制更新作用于逆变器,FlagForce的值为-1则不进行强制更新。需要说明的是,在图7b中,波形Flag的值最大为4,本文设计的算法中,若下一时刻的开关状态仍为Sold时,将进行强制更新,且同时变量Flag的值清零,所以Flag的值不会等于5。经过电流更新停滞的抑制作用之后,电机在稳态运行过程中能够避免因停滞更新而带来的转速脉动。
图8将本文提出的PF-MFPCC算法与传统FCS- MPCC算法和CD-MFPCC算法的相电流的总谐波畸变率(Total Harmonic Distortion, THD)进行比较。需要说明的是,在该仿真部分,仅改变FCS-MPCC算法中模型电感参数的值来实现参数出现误差的情况。由图8a可以看到,电感参数误差会使得相电流含有较大的电流谐波甚至发生畸变。而对于CD- MFPCC和PF-MFPCC两种算法,由于其中不含有电机模型,所以系统控制性能不受参数误差的影响。另外,CD-MFPCC算法中由于电流更新停滞现象的出现,会使得相电流出现如图1所示的电流尖峰。
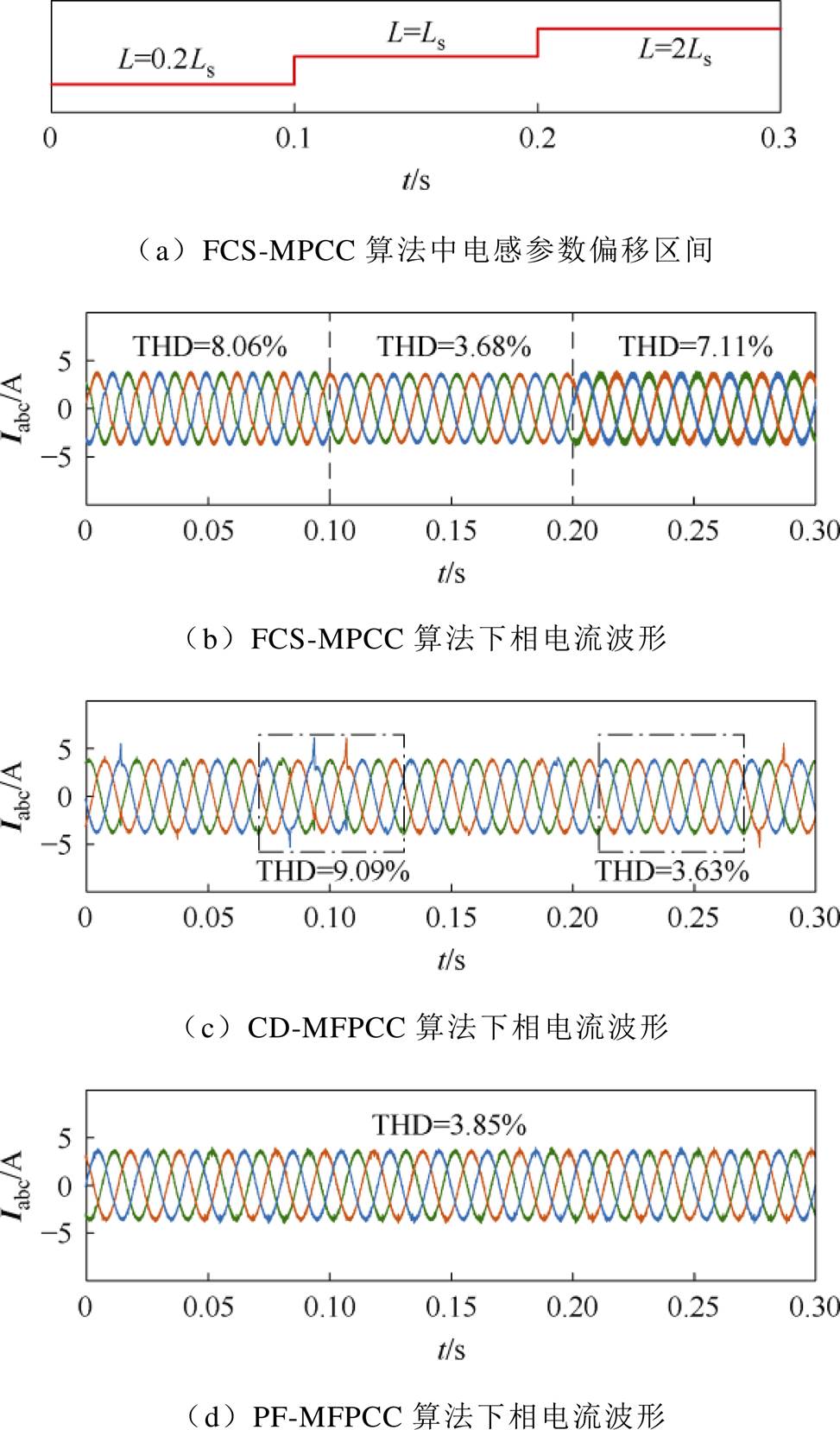
图8 不同电感设置下三种控制算法的仿真比较
Fig.8 Simulation comparison of three control schemes under difference settings of inductance
通过图8中三种算法的仿真比较可以看到,所提方法能够避免因电机参数产生误差导致的电机驱动系统控制性能下降,同时有效抑制电流更新停滞带来的负面影响,提高控制系统对于电流的控制性能。
为进一步验证本文提出的基于功率因数角计算的改进型无模型预测电流控制策略,搭建了电机对拖实验平台,如图9所示。该实验平台中,被控电机与负载电机同轴连接,负载电机提供负载转矩。负载电机和功率电阻器之间通过不控整流器件连接,通过调节功率电阻可以改变负载转矩。被控电机参数与表1相同。
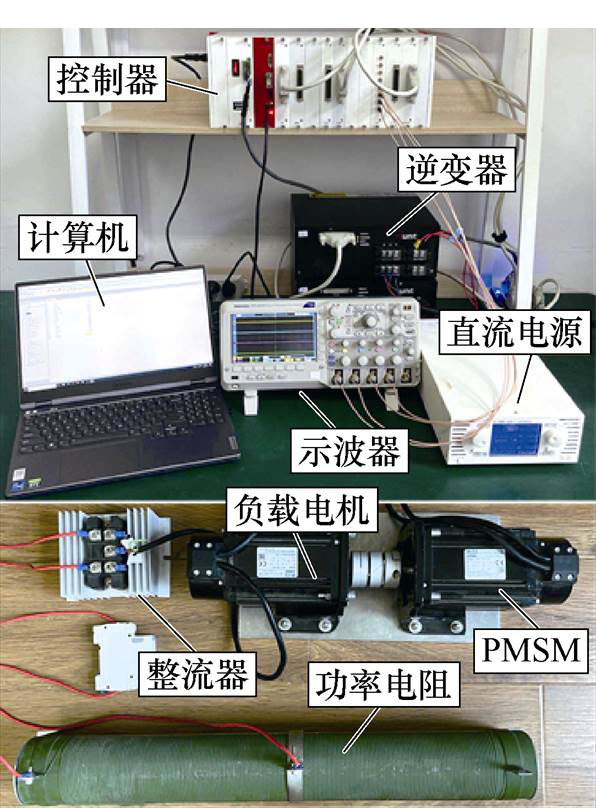
图9 实验平台
Fig.9 Experimental platform
图10为电机运行在90 r/min时,分别进行传统FCS-MPCC算法、CD-MFPCC算法和本文提出的PF-MFPCC下的实验波形。图中,传统FCS-MPCC方法采用电机的准确参数作为参考。图10b中能够看到相电流波形中由于控制系统中发生了电流更新停滞而导致电流尖峰出现,此时相电流的THD= 36.68%,电流尖峰会使得电机电磁转矩突变,进而引起电机转速发生脉动。
对此本文提出的PF-MFPCC能够抑制电流更新停滞带来的转速脉动,有效改善CD-MFPCC方法在电机低频运行时出现的电流控制性能,如图10c所示,此时相电流的THD=14.66%。而图10a中在准确参数下的传统FCS-MPCC算法下,电机的相电流的THD=13.46%。经过比较,可以看到,PF-MFPCC在低频时仍能够对电机进行准确控制,在无电机参数时与传统FCS-MPCC控制效果近似。
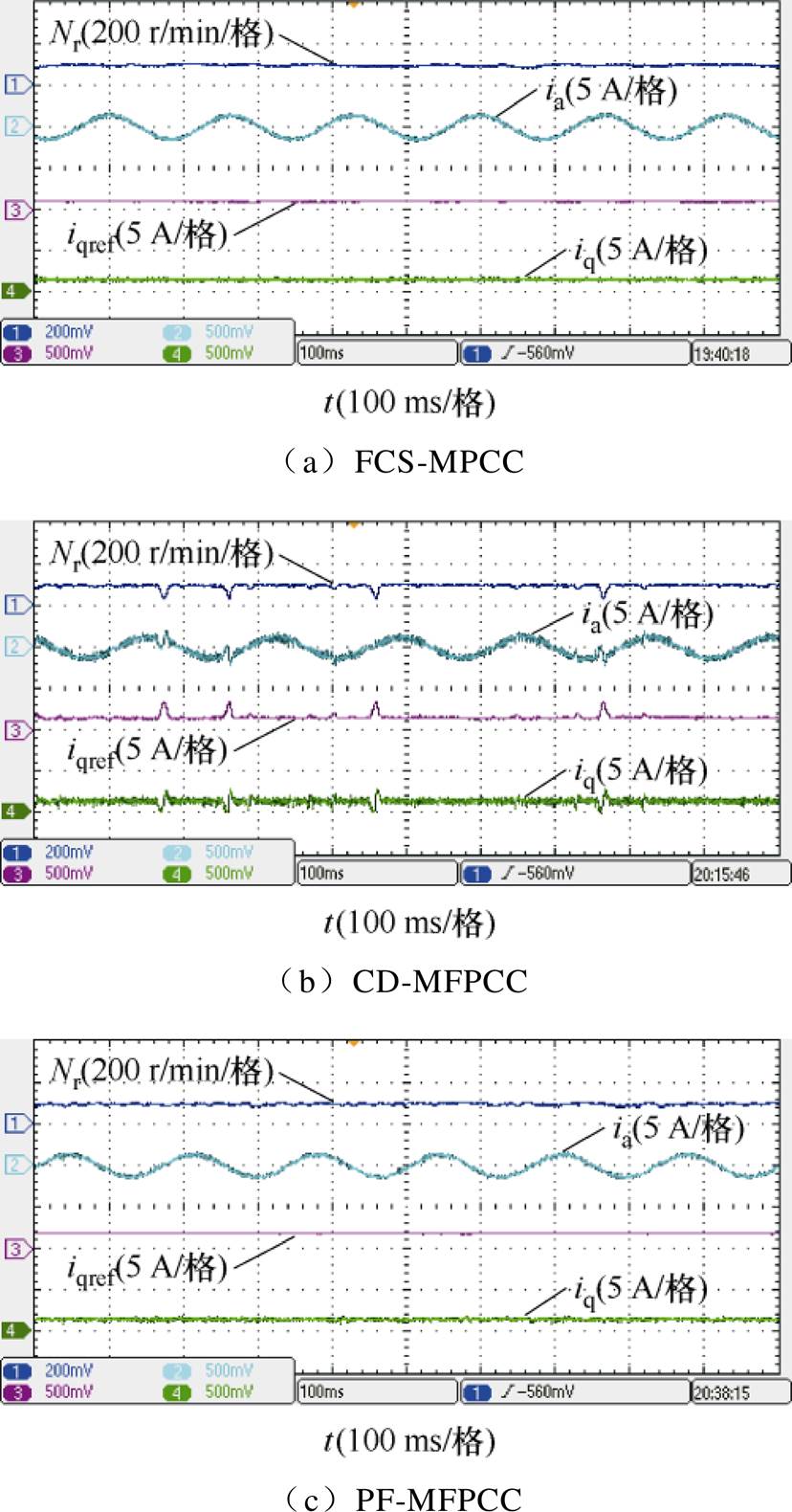
图10 三种算法在低频时的控制性能
Fig.10 The control performance of three algorithms at low frequency
图11为电机运行在1 000 r/min时,三种预测控制算法下的实验波形。图中,传统FCS-MPCC方法采用电机的准确参数。电机在传统FCS-MPCC、CD-MFPCC和PF-MFPCC三种控制算法下的相电流波形的THD依次为12.13%、10.08%和10.02%。可以看到,电机运行在高频时,CD-MFPCC算法在无参数条件下的控制性能较传统FCS-MPCC相近,这证明基于电流采样的无模型预测控制算法是有效的。在高频转速时,CD-MFPCC算法基本不会出现电流更新停滞现象,此时PF-MFPCC算法中将很少检测到电流停滞更新并对停滞的开关状态进行强制更新,所以可以认为此时PF-MFPCC算法与CD- MFPCC算法近似一致,所以这两种算法下的相电流的THD数值基本相同。
三种算法在电感为1.5Ls时的控制性能如图12所示。图12中,电机运行在750 r/min,与仿真部分不同,仅通过在电机的三个相线中分别串入电感,使得电感值增加为原来的1.5倍,以模拟电机电感参数发生漂移的情况。实验中,在电机出线端的三相线中接入电抗器实现电机参数漂移,而传统FCS- MPCC算法中的参数仍为原来的电机参数,在该条件三种算法控制下的相电流波形的THD依次为17.83%、13.85%和11.14%。
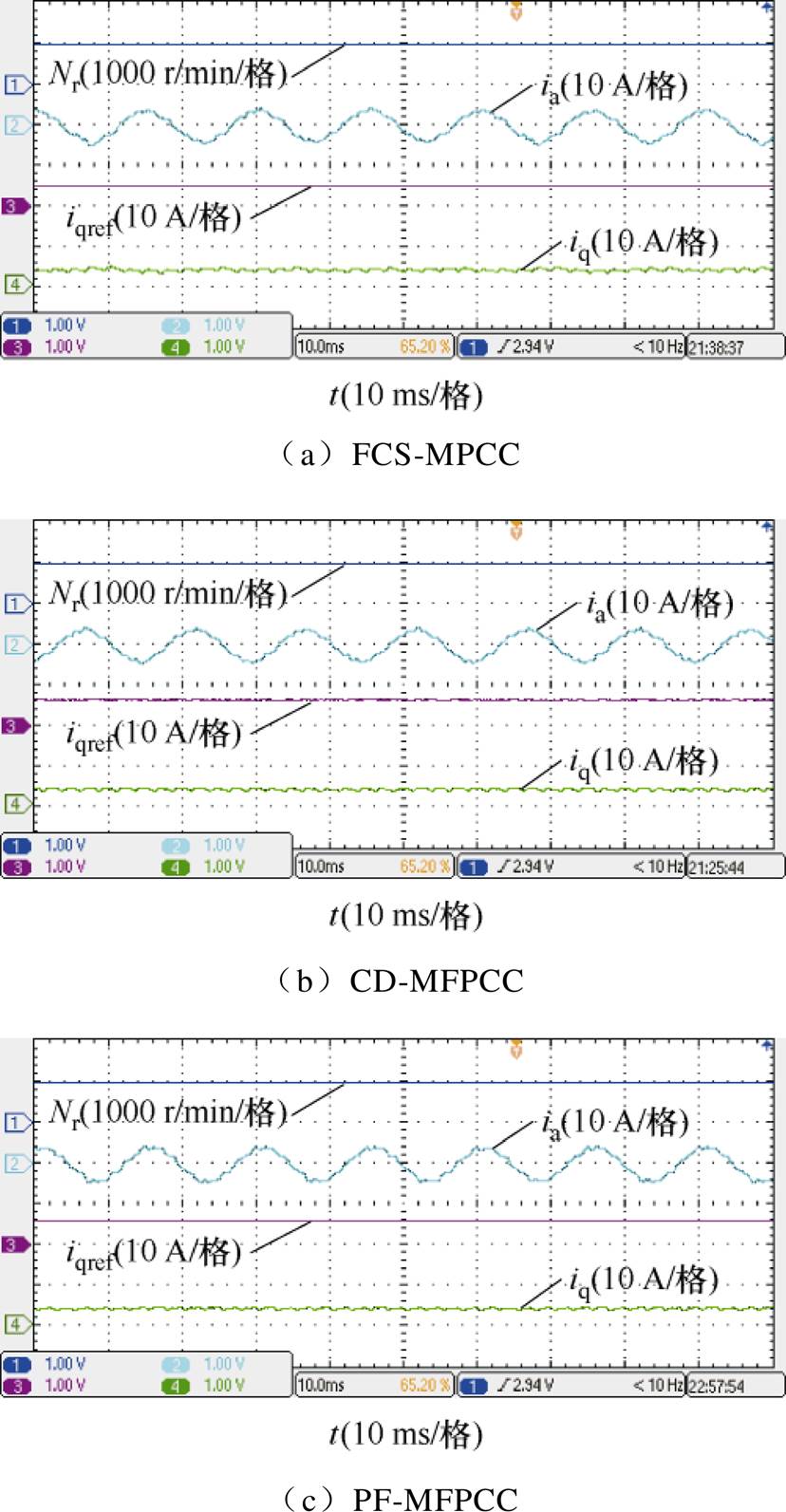
图11 三种算法在高频时的控制性能
Fig.11 The control performance of three algorithms at high frequency
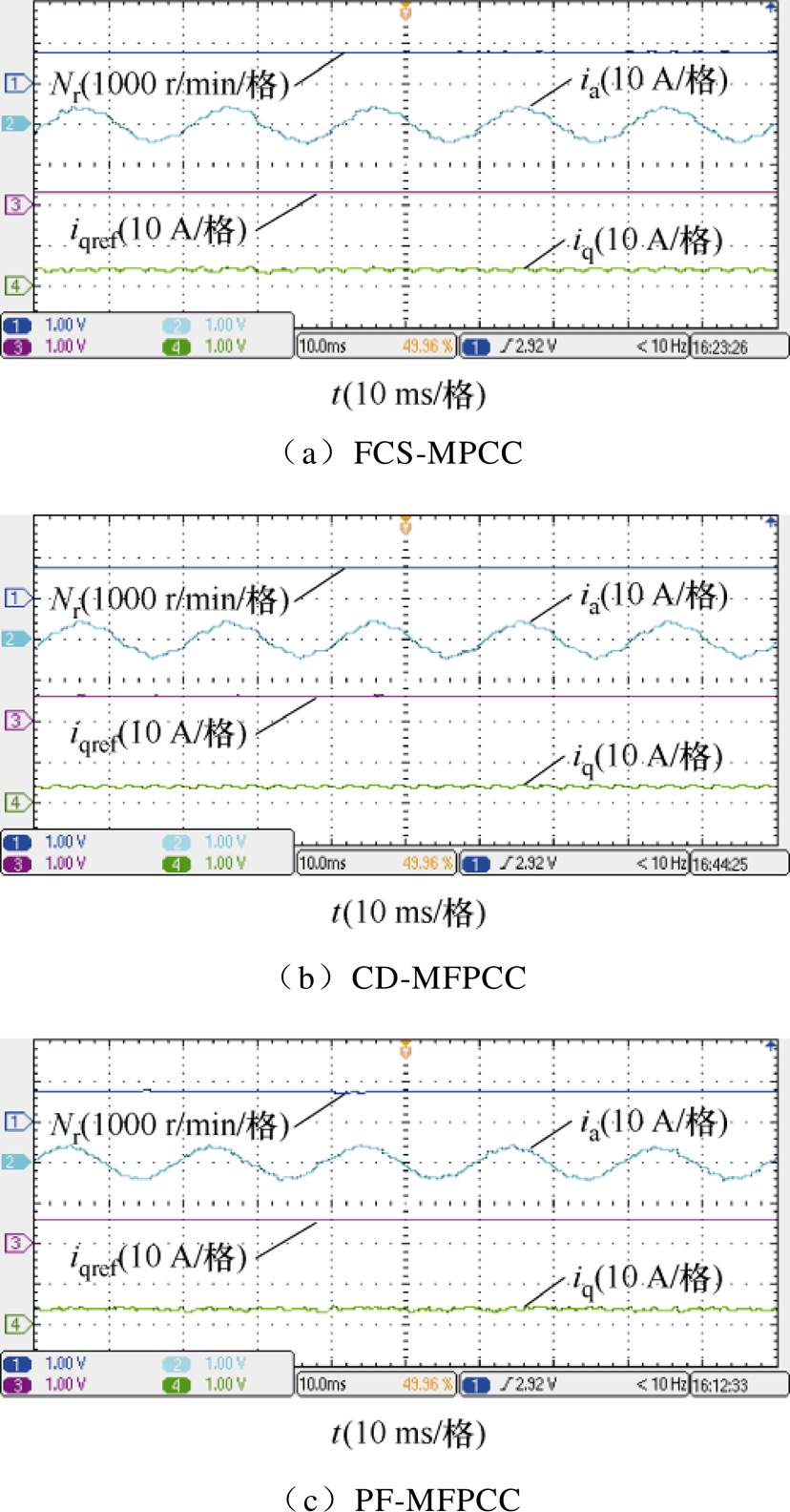
图12 三种算法在电感为1.5Ls时的控制性能
Fig.12 The control performance of the three algorithms when the inductance is 1.5Ls
三种算法在电感为0.5Ls时的控制性能如图13所示。图13的实验同样运行在750 r/min,然而由于电机本身结构无法改变,所以在该实验中,不改变电机硬件设备的基础上,仅将传统FCS-MPCC算法中的电机电感参数修改为原来的2倍,即代表实际电机电感参数发生偏移,L=0.5Ls。
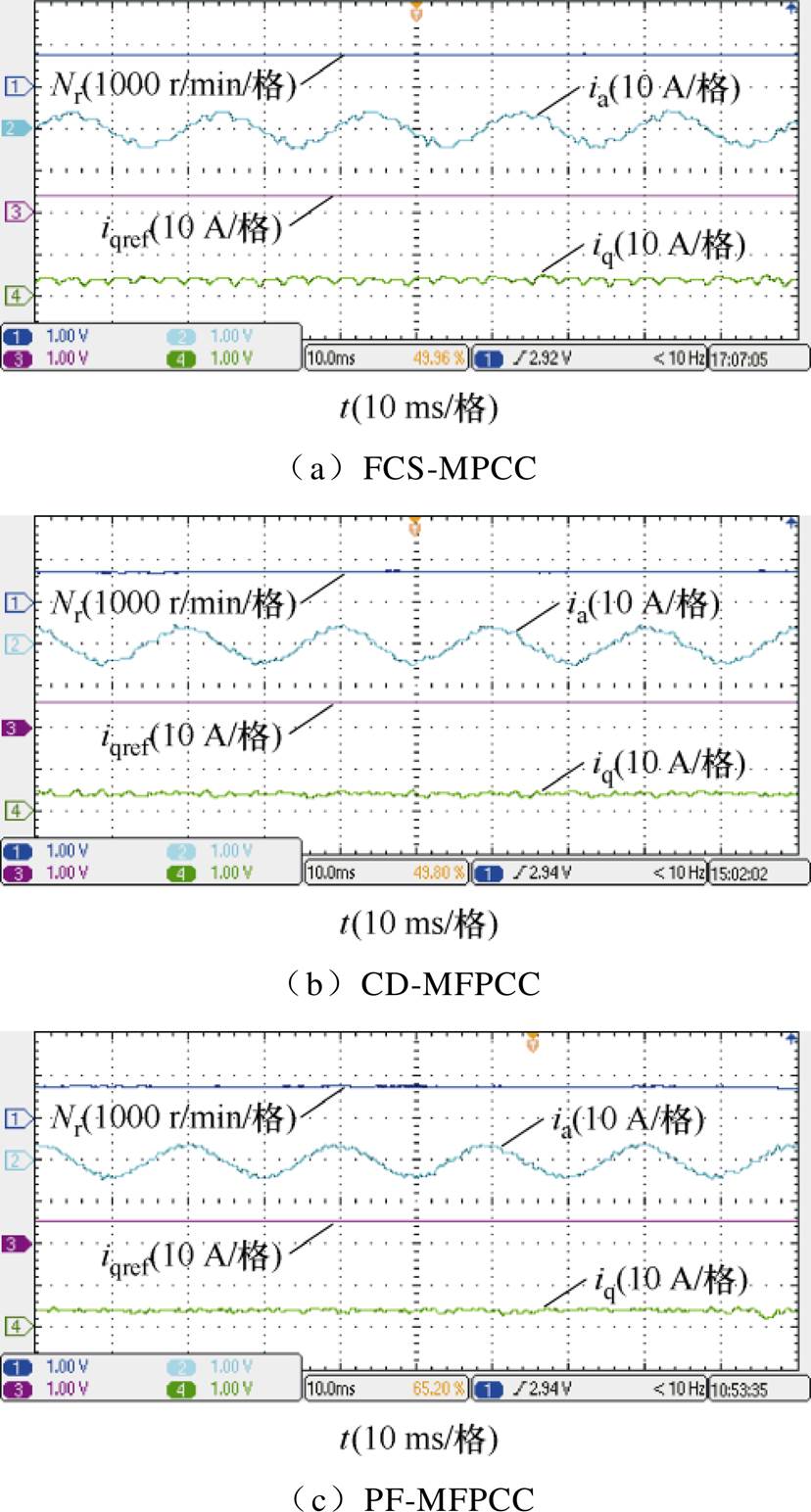
图13 三种算法在电感为0.5Ls时的控制性能
Fig.13 The control performance of the three algorithms when the inductance is 0.5Ls
图13a中可以看到,由于电感参数的准确性存在误差,导致电流中出现较多谐波,此时相电流的THD=22.23%。作为对照,无模型算法CD-MFPCC和PF-MFPCC的相电流波形分别为15.95%和13.87%。该结果则能够说明无模型预测控制在无法准确获得电机参数或电机实际参数发生偏移时仍能够对电流进行准确的预测控制,从而避免控制系统由于参数偏移导致电机控制性能下降。
图14为三种控制算法进行负载突变下的控制性能测试。需要说明的是,这里传统FCS-MPCC算法中采用准确的电机参数。对三组实验施加相同的负载扰动,从图14中可以看到,尽管两个无模型预测控制算法没有电机参数,但仍然能够抵抗扰动,其转速波形与相电流波形与传统FCS-MPCC算法相比能够证明无模型预测控制算法的有效性。图14b中,负载发生突变时出现了电流尖峰,而在图14c中本文所提出的PF-MFPCC算法能够及时抑制电流更新停滞现象,减小因电流突变引起的转速 脉动。
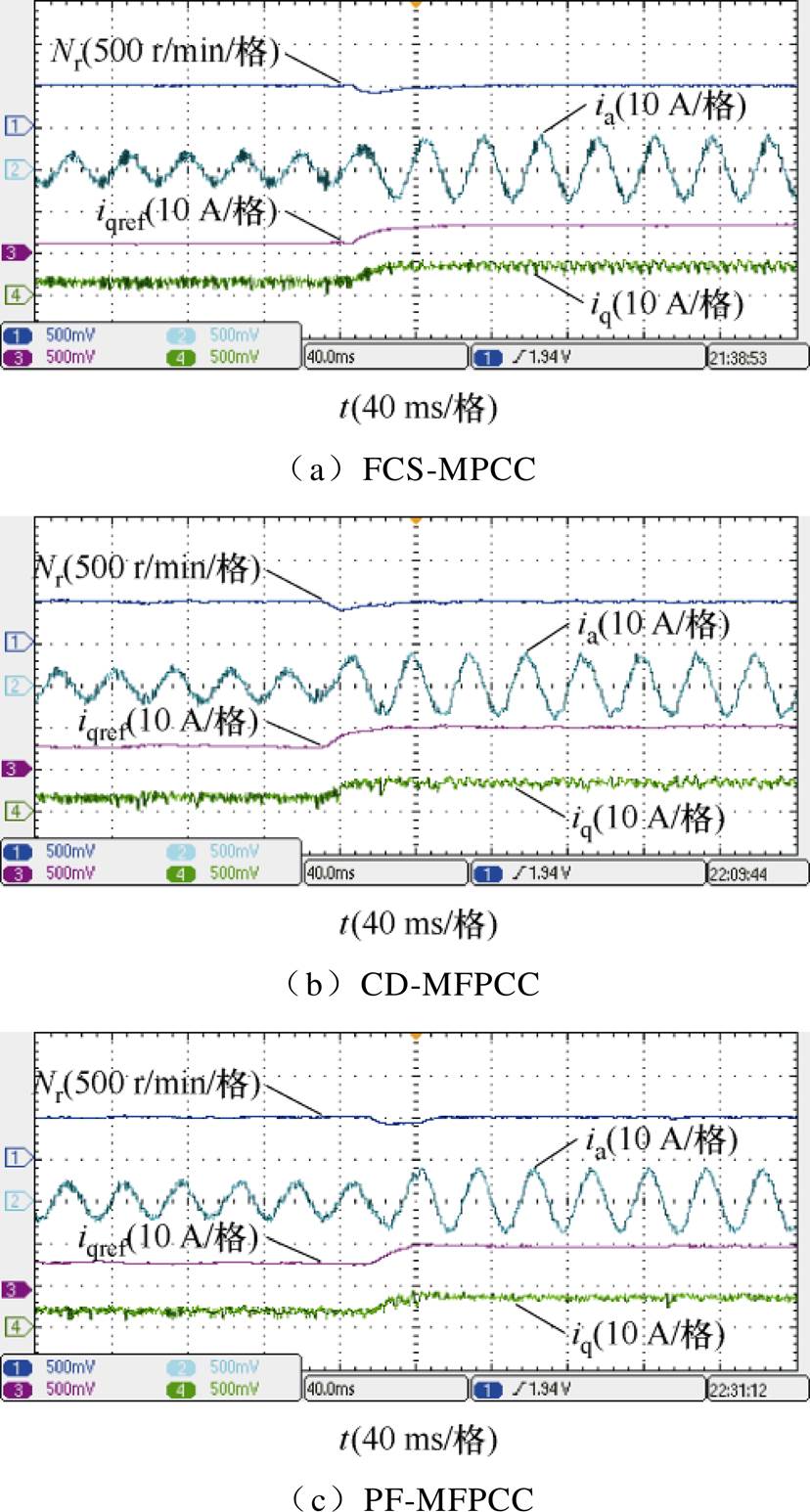
图14 三种算法在负载发生突变时的控制性能
Fig.14 The control performance of three algorithms with variable loads
本文在基于超局部模型参数的无模型预测控制算法的基础上,提出了一种改进的无模型预测控制算法,在采用电流误差计算辨识超局部模型参数的过程中,克服其出现的电流更新停滞现象。通过分析该现象出现的原因,提出了一种基于功率因数角的电流更新停滞抑制方法。通过仿真和实验,能够验证所提方法在电机参数发生偏差时依旧可以对电流进行准确控制,并抑制因电流更新停滞带来的控制性能下降,从而使得电机稳定运行,保证了控制系统的鲁棒性。
参考文献
[1] 鲍旭聪, 王晓琳, 彭旭衡, 等. 高速电机驱动关键技术研究综述[J]. 中国电机工程学报, 2022, 42(18): 6856-6871.
Bao Xucong, Wang Xiaolin, Peng Xuheng, et al. Review of key technologies of high-speed motor drive[J]. Proceedings of the CSEE, 2022, 42(18): 6856-6871.
[2] Huang Wentao, Zhu Xiaofeng, Zhang Hengliang, et al. Generalized fault-tolerant model predictive control of five-phase PMSM drives under single/two open- switch faults[J]. IEEE Transactions on Industrial Electronics, 2023, 70(8): 7569-7579.
[3] Huang Wentao, Du Jiachen, Hua Wei, et al. A hybrid model-based diagnosis approach for open-switch faults in PMSM drives[J]. IEEE Transactions on Power Electronics, 2022, 37(4): 3728-3732.
[4] 蒋钱, 卢琴芬, 李焱鑫. 双三相永磁直线同步电机的推力波动及抑制[J]. 电工技术学报, 2021, 36(5): 883-892.
Jiang Qian, Lu Qinfen, Li Yanxin. Thrust ripple and depression method of dual three-phase permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 883-892.
[5] 黄文涛, 花为, 於锋. 考虑定位力矩补偿的磁通切换永磁电机模型预测转矩控制方法[J]. 电工技术学报, 2017, 32(15): 27-33.
Huang Wentao, Hua Wei, Yu Feng. A model predictive torque control scheme for flux-switching permanent magnet machines with cogging torque compensation[J]. Transactions of China Electro- technical Society, 2017, 32(15): 27-33.
[6] 柯栋梁, 汪凤翔, 李家祥. 基于自适应高增益观测器的永磁同步电机预测电流控制方法[J]. 中国电机工程学报, 2021, 41(2): 728-738.
Ke Dongliang, Wang Fengxiang, Li Jiaxiang. Predictive current control of permanent magnet synchronous motor based on an adaptive high-gain observer[J]. Proceedings of the CSEE, 2021, 41(2): 728-738.
[7] 杜嘉晨, 樊启高, 黄文涛. 基于混合逻辑动态模型的PMSM系统开路故障诊断方法[J]. 电机与控制学报, 2023, 27(8): 100-108.
Du Jiachen, Fan Qigao, Huang Wentao. Open-circuit fault diagnosis for PMSM system based on mixed logical dynamic model[J]. Electric Machines and Control, 2023, 27(8): 100-108.
[8] 章回炫, 范涛, 边元均, 等. 永磁同步电机高性能电流预测控制[J]. 电工技术学报, 2022, 37(17): 4335-4345.
Zhang Huixuan, Fan Tao, Bian Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335-4345.
[9] 张虎, 张永昌, 刘家利, 等. 基于单次电流采样的永磁同步电机无模型预测电流控制[J]. 电工技术学报, 2017, 32(2): 180-187.
Zhang Hu, Zhang Yongchang, Liu Jiali, et al. Model-free predictive current control of permanent magnet synchronous motor based on single current sampling[J]. Transactions of China Electrotechnical Society, 2017, 32(2): 180-187.
[10] Huang Wentao, Hua Wei, Yin Fangbo, et al. Model predictive thrust force control of a linear flux- switching permanent magnet machine with voltage vectors selection and synthesis[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4956-4967.
[11] 陈卓易, 屈稳太. 基于PID型代价函数的永磁同步电机模型预测电流控制[J]. 电工技术学报, 2021, 36(14): 2971-2978.
Chen Zhuoyi, Qu Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971- 2978.
[12] 郭磊磊, 王朋帅, 李琰琰, 等. 不同代价函数下永磁同步电机模型预测控制参数失配可视化分析[J]. 电工技术学报, 2023, 38(4): 903-914.
Guo Leilei, Wang Pengshuai, Li Yanyan, et al. Visual analysis of parameters mismatch in model predictive control for permanent magnet synchronous motor under different cost functions[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 903-914.
[13] 史涔溦, 解正宵, 陈卓易, 等. 永磁同步电机无参数超局部模型预测控制[J]. 电机与控制学报, 2021, 25(8): 1-8.
Shi Cenwei, Xie Zhengxiao, Chen Zhuoyi, et al. Model-free predictive control based on ultra-local model for permanent magnet synchronous machines[J].Electric Machines and Control, 2021, 25(8): 1-8.
[14] 张永昌, 杨海涛, 魏香龙. 基于快速矢量选择的永磁同步电机模型预测控制[J]. 电工技术学报, 2016, 31(6): 66-73.
Zhang Yongchang, Yang Haitao, Wei Xianglong. Model predictive control of permanent magnet synchronous motors based on fast vector selection[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 66-73.
[15] 李键, 牛峰, 黄晓艳, 等. 永磁同步电机有限控集模型预测电流控制预测误差分析[J]. 电机与控制学报, 2019, 23(4): 1-7.
Li Jian, Niu Feng, Huang Xiaoyan, et al. Prediction error analysis of finite-control-set model predictive current control for PMSMs[J]. Electric Machines and Control, 2019, 23(4): 1-7.
[16] Khalilzadeh M, Vaez-Zadeh S, Rodriguez J, et al. Model-free predictive control of motor drives and power converters: a review[J]. IEEE Access, 2021, 9: 105733-105747.
[17] Zhang Yongchang, Liu Jie. An improved model-free predictive current control of PWM rectifiers[C]//2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 2017: 1-5.
[18] Lin Chengkai, Liu Tianhua, Yu J T, et al. Model-free predictive current control for interior permanent- magnet synchronous motor drives based on current difference detection technique[J]. IEEE Transactions on Industrial Electronics, 2014, 61(2): 667-681.
[19] Lin Chengkai, Yu J T, Lai Y S, et al. Improved model-free predictive current control for synchronous reluctance motor drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3942-3953.
[20] Carlet P G, Tinazzi F, Bolognani S, et al. An effective model-free predictive current control for synchronous reluctance motor drives[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 3781-3790.
[21] Zerdali E, Wheeler P. Model-free simplified predictive current control of PMSM drive with ultra-local model-based EKF[C]//2021 3rd Global Power, Energy and Communication Conference (GPECOM), Antalya, Turkey, 2021: 62-66.
[22] 汪凤翔, 柯哲涵, 柯栋梁, 等. 基于强跟踪扩展卡尔曼观测器的三电平逆变器永磁同步电机无模型预测电流控制[J]. 中国电机工程学报, 2023, 43(22): 8910-8922.
Wang Fengxiang, Ke Zhehan, Ke Dongliang, et al. Model-free predictive current control of three-level Inverter-fed PMSM based on strong tracking extended Kalman observer[J]. Proceedings of the CSEE, 2023, 43(22): 8910-8922.
[23] 许令亮, 陈桂明, 李乔扬. 基于ESO的超局部无模型PMSM转速预测控制[J]. 北京航空航天大学学报, 2022, 48(11): 2204-2214.
Xu Lingliang, Chen Guiming, Li Qiaoyang. Ultra- local model-free speed predictive control based on ESO for PMSM[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2204- 2214.
[24] 苏光靖, 李红梅, 李争, 等. 永磁同步直线电机无模型电流控制[J]. 电工技术学报, 2021, 36(15): 3182-3190.
Su Guangjing, Li Hongmei, Li Zheng, et al. Research on model-free current control of permanent magnet synchronous linear motor[J]. Transactions of China Electrotechnical Society, 2021, 36(15): 3182-3190.
[25] Han Lei, Zhang Yongchang, Wang Xing, et al. Current harmonics minimization of model-free predictive current control for PWM rectifiers based on hybrid SVM[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2024, 12(1): 486-495.
[26] 陈卓易, 邱建琪, 金孟加. 永磁同步电机有限集无参数模型预测控制[J]. 电机与控制学报, 2019, 23(1): 19-26.
Chen Zhuoyi, Qiu Jianqi, Jin Mengjia. Finite control set nonparametric model predictive control for permanent magnet synchronous machines[J]. Electric Machines and Control, 2019, 23(1): 19-26.
[27] Michel F, Cédric J. Model-free control[J]. International Journal of Control, 2013, 86(12): 2228-2252.
Abstract Permanent magnet synchronous motor (PMSM) has been widely used in industrial production, marine propulsion, and electric vehicle drive systems. To realize the high-performance control of PMSM, the finite control set model predictive current control (FCS-MPCC) algorithm has been applied to the speed control of PMSM by its single control mode and excellent dynamic performance. However, the prediction accuracy of this method largely depends on the accuracy of the mathematical model of the motor. In the actual control system, factors such as the magnetic saturation effect and temperature rise will cause parameter changes in motors, leading to the decline of model predictive control accuracy.
The ultralocal model has been proposed as a model-free predictive control algorithm instead of the motor mathematical model to solve the parameter sensitivity problem in the FCS-MPCC algorithm. In this case, the current prediction can be realized by identifying the lumped parameters in the ultralocal model. The current sampling values of three consecutive sampling periods are subtracted successively to obtain the current error values for representing the lumped parameters in the ultralocal model.
However, a stagnation problem exists in the current update. The specific phenomenon of this problem is that the phase current waveform appears to have an obvious peak, and the switching state of the inverter is no longer updated in several periods. This paper analyzes the mechanism of this phenomenon and then proposes a suppression strategy based on power factor angle calculation. The phenomenon of the current updating stagnation mainly occurs in the period with small phase current variation amplitude. During the initial several sampling cycles in this period, the current error value is unchanged even if the switching state of the inverter is different, which causes the lumped parameter expression to cross zero. The ultralocal model cannot accurately predict the current. The switching state of the inverter remains unchanged without updating under the inaccuracy prediction.
Therefore, this paper adopts two steps to suppress such a phenomenon. The current updating stagnation state is first judged, and then the calculated switching state is updated on the inverter to make the system exit the stagnation state. When the system enters the current updating stagnation state, its main feature is that the switching state of the inverter remains unchanged for several periods. Once the continuous period value of the switching state of the inverter reaches the set value, the inverter state is directly forced to update. Then, to get the appropriate switching state, it is necessary to determine the sector of the reference voltage vector. Thus, a method based on power factor angle calculation is proposed. In this method, the sampled current and voltage of the current dq axis are calculated to obtain the value of the power factor angle, and the position of the reference voltage vector is calculated.
Finally, the effectiveness of the proposed method is verified by experiments on a PMSM pair-tow platform. Under low speed and light load conditions, the THD value of the current after the suppression is reduced from 36.68% to 14.66%. Compared with the traditional FCS-MPCC algorithm, the THD value of phase current is reduced by 8.36%, which proves that the proposed method can reduce the sensitivity of motor parameters.
keywords:Permanent magnet synchronous motor, predictive control, ultralocal model
DOI: 10.19595/j.cnki.1000-6753.tces.240201
中图分类号:TM341
国家自然科学基金资助项目(62373168)。
收稿日期 2024-01-30
改稿日期 2024-02-23
罗力岩 男,1999年生,硕士研究生,研究方向为永磁同步电机预测控制和无位置传感器控制。E-mail: luo_liyany@163.com
樊启高 男,1986年生,博士,教授,博士生导师,研究方向为高速电机控制技术、智能传感及机电一体化技术。E-mail: qgfan@jiangnan.edu.cn(通信作者)
(编辑 崔文静)