表1 各类抽蓄机组主要性能指标
Tab.1 Main performance of all kinds of pumped storage units
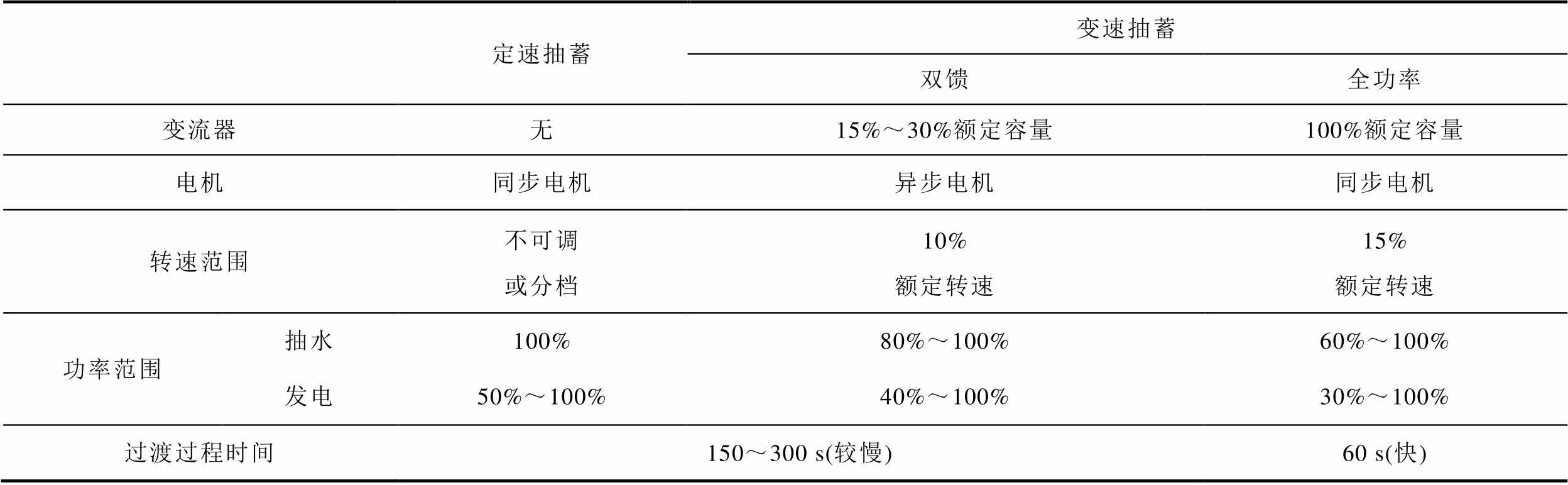
定速抽蓄变速抽蓄 双馈全功率 变流器无15%~30%额定容量100%额定容量 电机同步电机异步电机同步电机 转速范围不可调或分档10%额定转速15%额定转速 功率范围抽水100%80%~100%60%~100% 发电50%~100%40%~100%30%~100% 过渡过程时间150~300 s(较慢)60 s(快)
摘要 全功率变速抽蓄机组(Full-power VSPS)以其优异的综合性能及逐渐降低的成本成为未来电网中应对新能源随机性与波动性的重要设备,但理论研究及工程实践中均存在对机组出力调节过程中功率特性及振荡机理认识不清的问题。对此,该文基于子模块建模的方法,搭建考虑复杂引水系统的全功率变速抽蓄机组水-机-电联合仿真模型,并提出基于过渡过程中单位转速-单位转矩轨线的机组功率特性分析方法。在此基础上,绘制了采用两种基本控制策略的机组在抽水及发电工况下的典型轨迹,根据其变化趋势得到了机组关键物理量的演变规律及转速反调等潜在运行风险,并进一步给出了这些风险的主要影响因素及对应的抑制策略。最后,结合仿真验证了所提方法及结论的正确性。该文可为全功率变速抽蓄机组功率特性的分析与优化提供模型与分析方法的参考。
关键词:全功率变速抽蓄机组 水-机-电联合仿真 转速优先控制 功率优先控制 功率特性
抽水蓄能作为目前技术最成熟、经济性最好的储能技术,成为了提升新能源消纳率及保障新型电力系统安全稳定灵活运行的重要手段[1-2]。我国已建成抽蓄机组装机规模超4 000万kW,但其中95%以上采用定速机组,其出力无法实现连续调节,尚不足以应对近年来电网出现的大规模新能源功率快速波动的问题。现有各类抽蓄机组的主要性能指标见表1,相比之下,全功率变速抽蓄机组转速调节范围最宽,机组结构及控制策略较为简单[3],尤其可直接在常规小水电或定速抽蓄基础上改装得到,随着大容量变流器成本的不断降低[4],其综合优势及发展潜力正逐步体现。
目前学界主要针对双馈机组开展研究,关于全功率机组的研究则处于起步阶段,尚未形成完整的研究体系,不存在成熟的工程案例,且相关文献也较为缺乏。从电力系统调度的视角,全功率变速抽蓄机组往往被视为受库容、出力及爬坡速率等条件约束的功率源[5-6]。但对机组自身而言,其对电网调度指令的响应能力及出力调节过程中具体的功率特性尚不明晰,且现有试验机组在运行过程中存在机理不明的转速及功率低频及超低频振荡现象[7],这些均制约着全功率变速抽蓄机组的进一步推广应用。因此,有必要研究机组自身出力调节过程中的功率特性及潜在运行风险,但目前相关研究主要存在以下两点困难:
表1 各类抽蓄机组主要性能指标
Tab.1 Main performance of all kinds of pumped storage units
定速抽蓄变速抽蓄 双馈全功率 变流器无15%~30%额定容量100%额定容量 电机同步电机异步电机同步电机 转速范围不可调或分档10%额定转速15%额定转速 功率范围抽水100%80%~100%60%~100% 发电50%~100%40%~100%30%~100% 过渡过程时间150~300 s(较慢)60 s(快)
首先,由于开展全功率变速抽蓄机组实物试验受到成本及场地等多方面因素的制约,建立机组整体精细化仿真模型成为机组功率特性研究的基础与关键所在。由于抽蓄机组结构及内部物理过程的复杂性,科研人员普遍采用子模块建模的方法开展机组建模研究,且已经在定速机组及双馈变速机组中取得了一些进展。但现有研究往往侧重于对机组部分特定环节的建模与分析,对其余环节做较为简化的处理,进而难以全面反映机组整体的功率特性。如文献[8]建立了高精度的水力环节非线性模型,但未涉及机电环节的具体控制策略。文献[9]建立了抽蓄机组小信号模型,并据此提出了提升机组频率支撑能力的多机组协调控制策略,但模型中也未考虑变流器的运行特性。文献[10]提出了提升双馈抽蓄机组频率响应特性的控制策略,但其在过渡过程中只将水泵水轮机视为恒转矩源,且并未进一步探讨该策略在抽水及发电工况下的性能差异。文献[11-12]建立了抽水工况下双馈变速抽蓄机组机电暂态模型,但未考虑复杂结构引水系统的建模方法。文献[13-14]分别建立了面向电网频率的双馈抽蓄机组小信号模型及降阶模型,但其均采用轴流式水轮机运行特性代替水泵水轮机,因此所得模型的精确度有待考证。文献[15]提出了全功率变速抽蓄机组功率优先控制模式下的小信号模型,并提取了过渡过程中机组的主要振荡模态及其影响因素,但其采用的水力环节模型过于简单且并未涉及对机组振荡本质原因的探讨。
其次,由于全功率变速抽蓄机组过渡过程涉及变流器及调速器两个不同的控制环节,二者可以分别控制转速及功率两个不同的物理量,由于变流器响应时间远小于调速器,因此可根据变流器控制的物理量将机组的控制策略分为转速优先及功率优先两类[15]。两种控制策略下机组的运行特性存在显著的差异,而即使采用同种控制策略时,机组在抽水及发电工况下的运行特性也存在一定的区别。目前学界对各控制策略下机组运行特性缺乏清晰整体的认识,且对各控制策略间的对比分析尚不够充分。如文献[11]主要研究了采用功率优先控制的双馈抽蓄机组在抽水工况下的运行特性;文献[13]则重点研究了采用转速优先控制的双馈抽蓄机组对电网频率小信号稳定性的影响;文献[16]提出了全功率变速抽蓄机组虚拟同步机控制策略,但采用机侧变流器稳定直流电压在大中型抽蓄机组中难以实现;文献[17-18]给出了变速抽蓄机组抽水及发电工况下的几类基本控制策略,但其采用的机组整体模型较为简单,因此对各控制策略下机组功率特性的分析尚不够准确。
针对上述问题,本文建立了基于水-机-电联合仿真的全功率变速抽蓄机组整体模型,提出了基于机组特性曲线分析其运行特性的研究方法,据此得出了转速优先及功率优先控制策略下机组关键物理量的变化规律,并通过仿真算例对分析结果进行了验证。进一步地,本文分析了不同工况及不同控制策略下全功率变速抽蓄机组的功率特性及其主要影响因素,比较了机组功率特性间的差异及差异的主要成因,总结了机组潜在运行风险并提出了相应的改进方案。
全功率变速抽蓄机组基本拓扑如图1所示,由于其内部发生着复杂的水-机-电耦合物理过程,直接对其进行整体建模较为困难。本文采用子模块建模的思想,将机组各部分按其内部进行的物理过程分为引水系统、水泵水轮机、水轮机调速器、发电电动机及全功率变流器等若干子模块,分别对其进行建模后整合得到机组整体仿真模型。
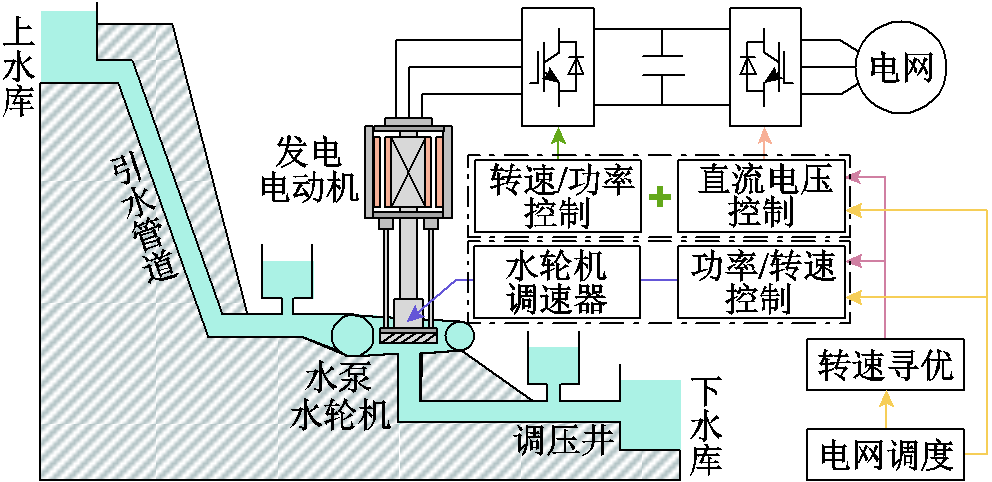
图1 全功率变速抽蓄机组基本拓扑
Fig.1 Basic topology of full-power VSPS
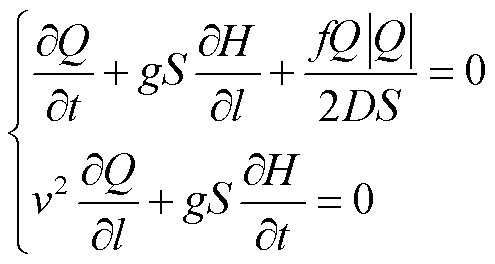
引水系统包含上水库、下水库、引水管道及调压井等各类设备。引水管道是其中最为基本的环节,其基本方程为
 (1)
(1)
式中,Q为流量;H为水头;v为水击波速;g为重力加速度;f为管道水力摩阻系数;S为管路截面积;D为管路直径;t为时间;l为沿管路方向的长度。
由于式(1)与均匀传输线方程结构的相似性,可以将流量类比为电流,水头类比为电压,进而可将长dx的引水管等效为长dx的均匀传输线,通过比较方程的各项系数,得到单位长度引水管道的等效电路RLC参数为
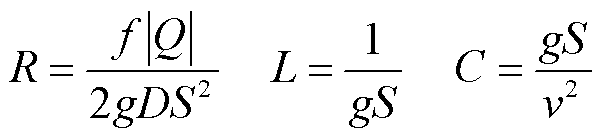 (2)
(2)
调压井通过内部的自由水面消纳水锤效应,其等效电路参数为
 (3)
(3)
式中,下标S代表调压井参数;下标r代表阻尼孔参数;下标c代表自由水面参数;z代表垂直方向。
上下水库在等效电路法中体现为直流电压源,而水泵水轮机则体现为受控电压源,因此,常见的带双调压井引水系统的等效电路整体模型如图2a所示,调压井的等效电阻、电感与引水管道等效电容相对较小,因此可以忽略。当调节水泵水轮机流量的出力时,设水泵水轮机处水头及流量分别为Hpt及Qpt,可以得到等效电路的戴维南模型如图2b所示。
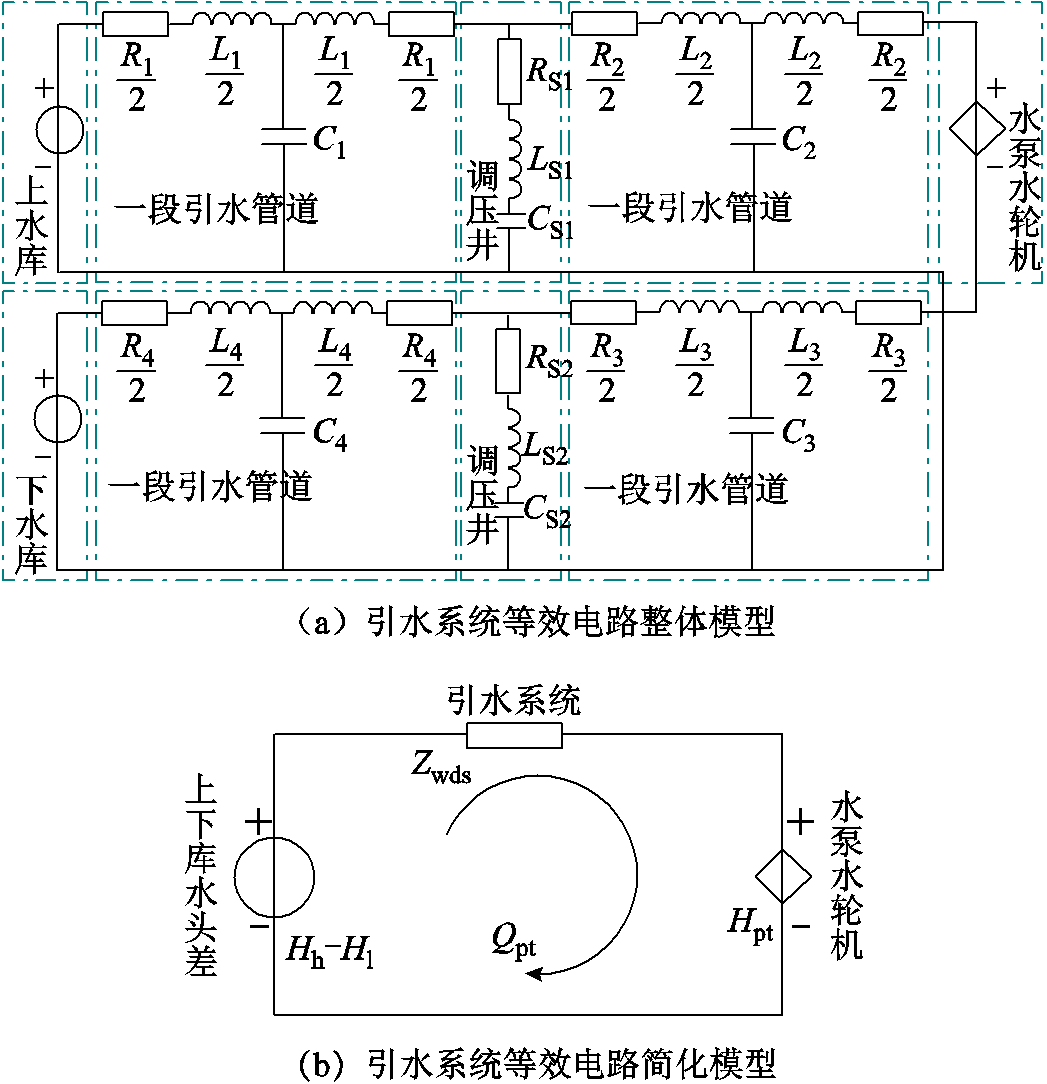
图2 双调压井引水系统等效电路
Fig.2 Equivalent circuit of water diversion system with two surge tanks
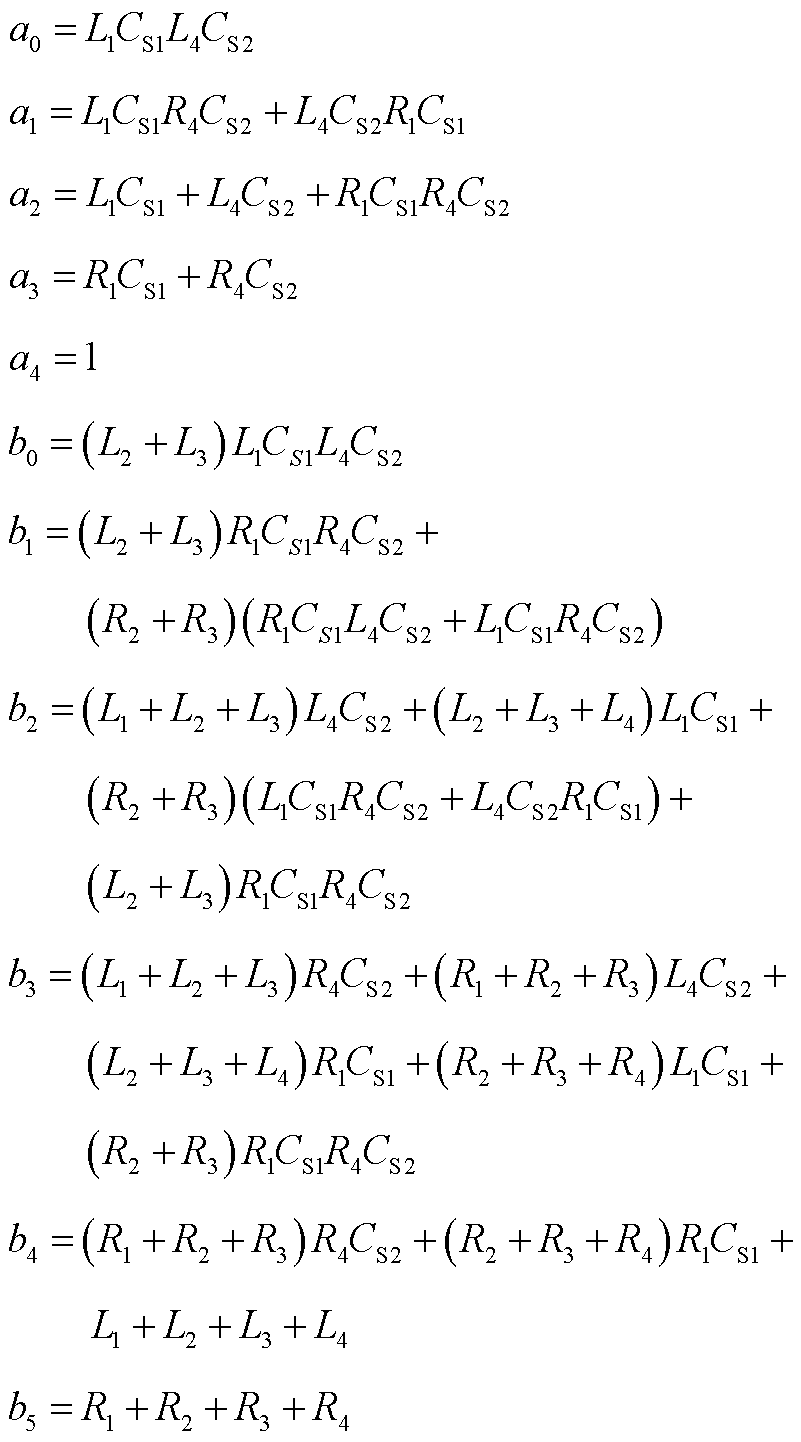
据此可以得到Hpt及Qpt的关系如式(4)所示,其中各项系数详见本文附录及文献[19]。
 (4)
(4)
水泵水轮机是抽蓄机组能量转换的核心设备,然而由于其内部复杂的流体力学过程,尚不能用解析方法精确描述其运行特性。目前研究机组过渡过程时一般采用特性曲线模型[20-21]。水泵水轮机特性曲线中涉及的参数均为单位参数,其与实际值的折算关系为
 (5)
(5)
式中,下标u代表单位参数;下标pt代表水泵水轮机实际参数;n为转速;T为转矩;Dpt为水泵水轮机标称直径。
水泵水轮机在水泵制动工况、水轮机制动工况及反水泵工况下均存在特性曲线的交叉及多值现象,即特性曲线的“驼峰区”及“S区”,机组在这些区域内存在较为严重的水力振荡[22]。但当机组正常运行时,其工作点位于特性曲线的高效区内,距离不稳定区较远,因此本文只考虑高效区内的机组运行特性。某水泵水轮机高效区内特性曲线如图3所示。
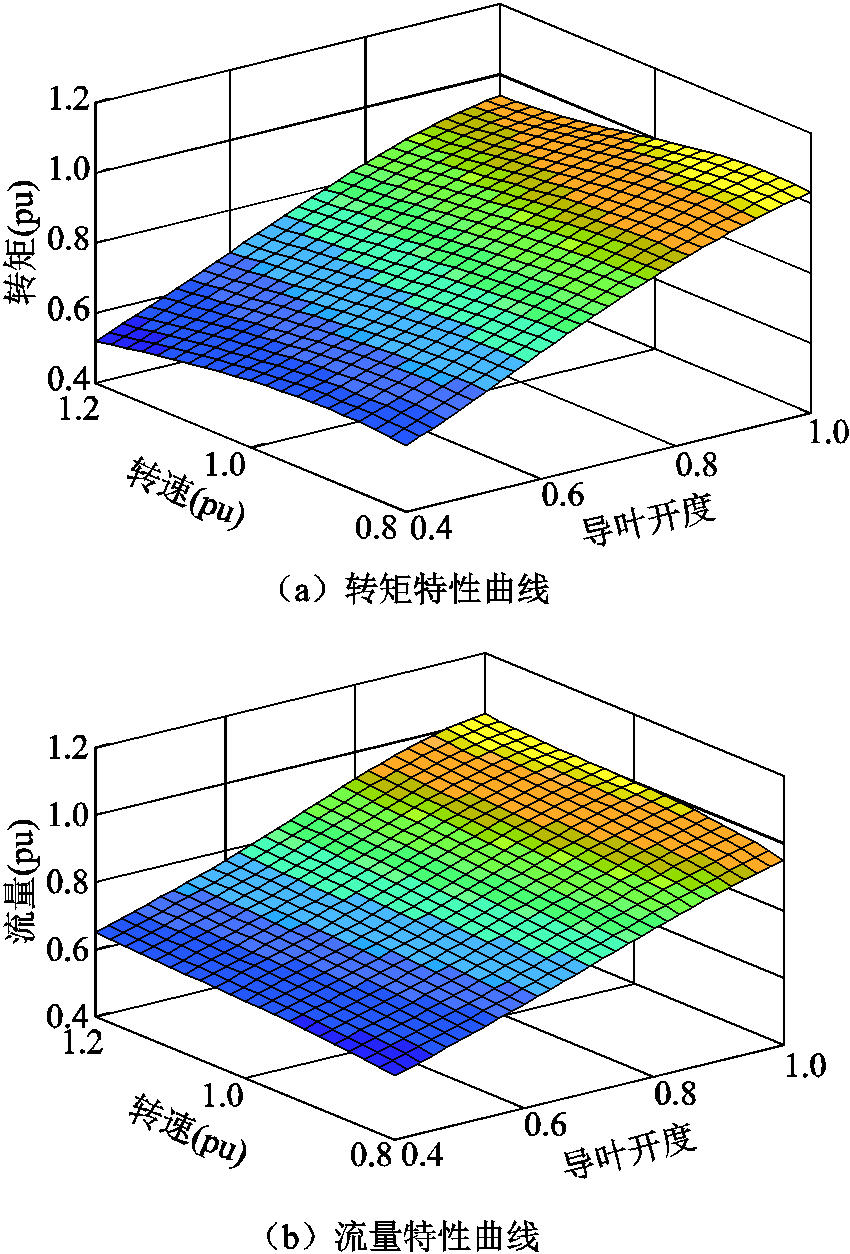
图3 水泵水轮机高效区特性曲线
Fig.3 Characteristic curve in high efficiency zone of the pump turbine
变速抽蓄机组的核心优势为可以根据功率指令调整自身转速及导叶开度,使机组始终运行于最优效率点。机组最优转速可以近似为关于水头及功率指令的多项式,而导叶开度的调节通过调速器实现,其基本控制框图如图4所示[23]。图中Xref及X视控制策略可以表示转速或者功率,bp为接力器永态差值系数,Ty为接力器响应时间常数,G为接力器输出的导叶开度实际值。
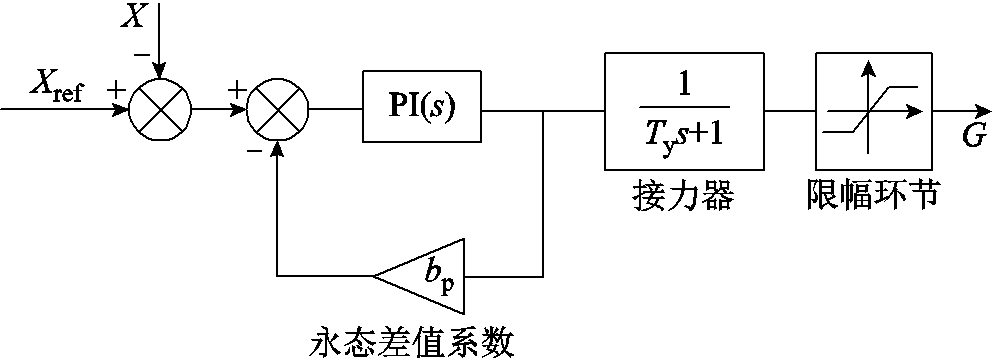
图4 调速器控制框图
Fig.4 Control block diagram of the governor
全功率变流器的基本控制框图如图5所示,其中网侧变流器用于稳定直流电压,机侧变流器用于控制电机的转速或功率。
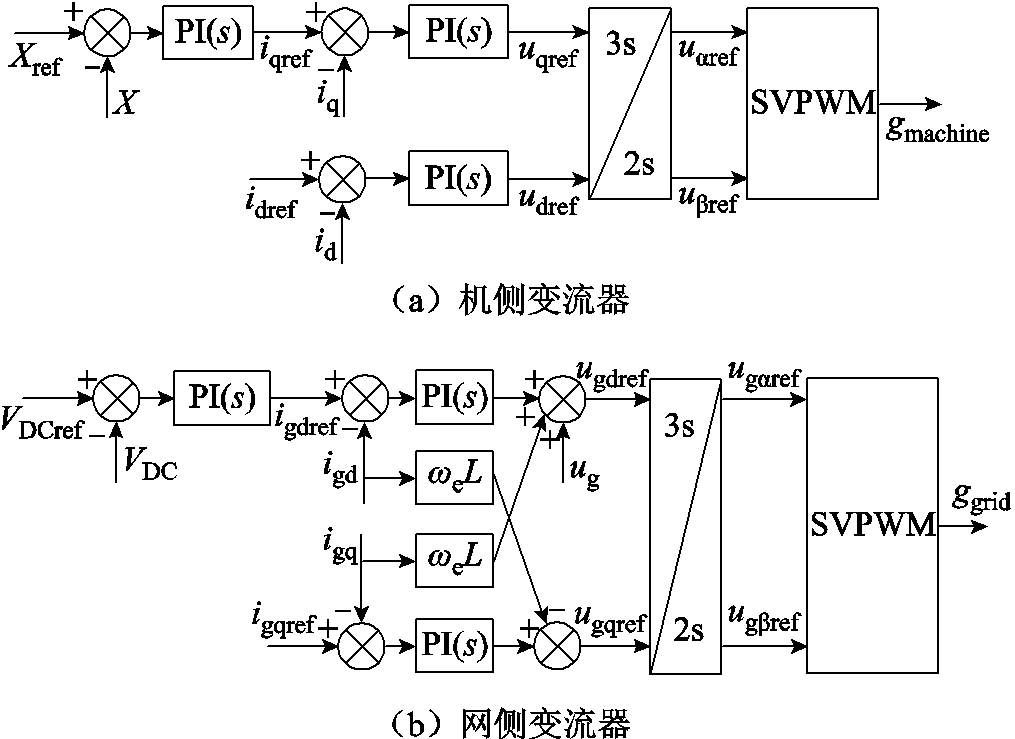
图5 全功率变流器基本控制框图
Fig.5 Basic control diagram of full-power convertor
全功率变速抽蓄机组的发电电动机采用电励磁或永磁同步电机。以发电工况下电机旋转方向为正方向,其转子运动方程为
 (6)
(6)
式中,J为机组整体转动惯量;Tem为电磁转矩;D为阻尼系数; 、
、 分别为电机角速度、转速变化量。
分别为电机角速度、转速变化量。
为使电机功率因数最大,一般采用d轴电流id=0控制,该控制策略下Tem的计算公式为
 (7)
(7)
式中,p为电机极对数; 为励磁磁链,本文暂不考虑电励磁同步电机励磁系统的调节,因此视为常数。
为励磁磁链,本文暂不考虑电励磁同步电机励磁系统的调节,因此视为常数。
全功率变速抽蓄机组与双馈机组的核心区别在于,前者与电网间的能量传递全部经由变流器实现,而后者则少部分经由变流器,其余大部分由定子绕组直接连接电网。机组过渡过程所需时间基本在60 s左右,因此结合仿真计算量、机组拓扑的简易性及能量流动途径的单一性,将全功率变流器简化为单电流环,并视其为时间常数为Tc的惯性环节,此时发电电动机及全功率变流器的整体模型如图6所示。
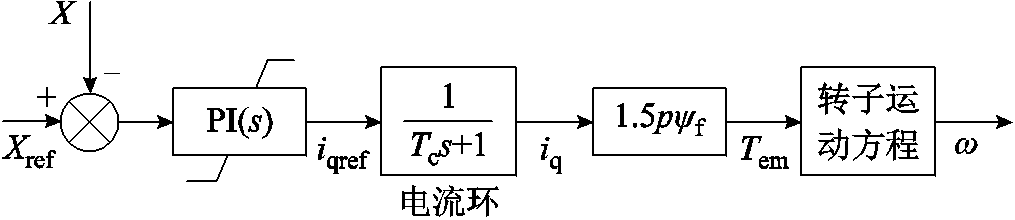
图6 全功率变流器简化模型
Fig.6 Simplified model of full-power converter
将以上各子模块相连,得到机组基本模型如图7所示。其中,蓝色点画线方框及箭头代表该结构或物理过程受水力环节影响,灰色实线方框及箭头代表该结构或物理过程受机械环节影响,绿色虚线方框及箭头代表该结构或物理过程受电气环节影响,黑色箭头涉及的物理过程及X与Y所代表的物理量视机组控制策略而定。

图7 机组基本模型
Fig.7 Basic model of Full-power VSPS
描述机组运行特性的最核心的两个物理量为其转速与电磁功率。由图7可知,机组出力调节过程中二者的调节通过调速器及变流器这两个主要的控制环节分别实现。前者通过伺服电动机调节导叶的开度,而后者通过开关管的动作改变电流的大小,因此前者响应时间远大于后者,即过渡过程中受变流器控制的物理量总能较快达到新的指令值,而受调速器控制的物理量的变化过程则较为缓慢。本文将变流器控制转速、调速器控制功率的控制模式称为转速优先控制策略;将调速器控制转速、变流器控制功率的控制模式称为功率优先控制策略。由于转速与功率响应时间的不同,两种控制策略下机组的功率特性存在较为明显的差异。在接下来的分析中,本文均以功率指令的绝对值下降为例,而在功率指令上升时,分析的方法及结论都是类似的。
转速优先控制的整体控制框图如图8所示。机组接收电网调度指令后,经转速寻优算法得到转速指令并送至机侧变流器,同时将功率指令送至水轮机调速器和变流器迅速完成转速的调节,而调速器较为缓慢地实现功率的调节。
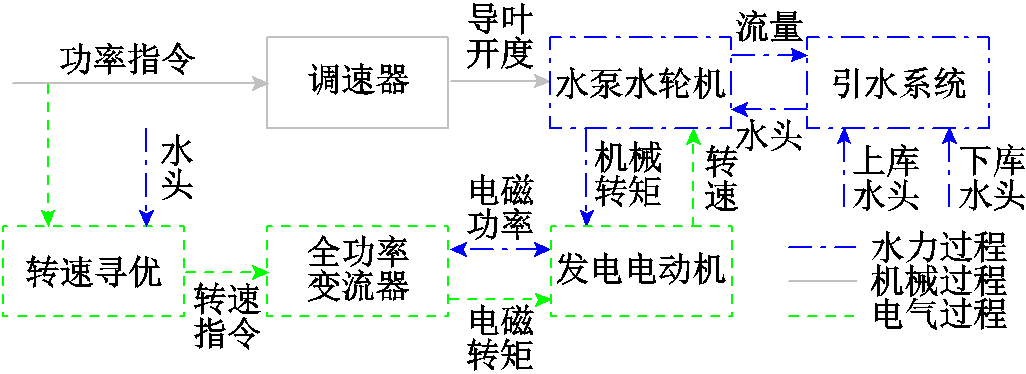
图8 转速优先控制框图
Fig.8 Speed priority control diagram
本文采用类似水轮机特性曲线的方法定性分析过渡过程中机组的运行特性,转速优先控制过渡过程如图9所示。出力调节前机组稳定运行于A点,接收调度指令后,变流器快速将转速降至新的目标转速,即机组工作点沿等开度线快速运动到B点,此后导叶开度缓慢减小而转速保持不变,机组工作点最终缓慢下降至C点,完成出力的调节。
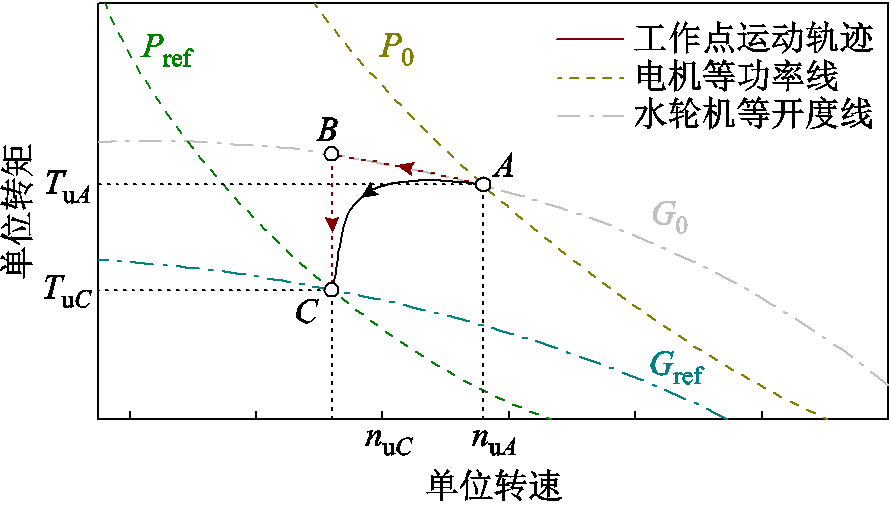
图9 转速优先控制过渡过程
Fig.9 Transition process under speed priority control
由于转子动能及水轮机机械转矩均与转速相关,因此在转速变化较快的AB段,其功率特性也较为复杂。由动能定理,得到忽略摩擦损耗时机组向电网输送电磁功率的表达式为
 (8)
(8)
式中,Ppt为水泵水轮机输入电机的机械功率;Ek为机组转子动能。发电工况下Pg取正,抽水工况下Pg取负。
对图3中的特性曲线作线性化处理可以得到水泵水轮机机械功率的绝对值如式(9)所示,其中kt在抽水工况下取正,在发电工况下取负。AB段导叶开度变化较小,但机组转速下降明显,水头由于水锤效应反向增加,即式(9)的后一项kgg+bg基本不变,而受二次方项的影响,前一项 通常在发电工况下增加,在抽水工况下减小。因此发电工况下,|Ppt|将在AB段反向上升,后随着导叶开度的降低而下降;而在抽水工况下,|Ppt|将在AB段快速下降,随后缓慢下降。
通常在发电工况下增加,在抽水工况下减小。因此发电工况下,|Ppt|将在AB段反向上升,后随着导叶开度的降低而下降;而在抽水工况下,|Ppt|将在AB段快速下降,随后缓慢下降。
 (9)
(9)
式中, 、
、 、
、 、
、 均为拟合参数。
均为拟合参数。
此外,若AB段转速变化过快,水泵水轮机机械功率的降低不足以支撑转子动能的快速变化,剩余的转子动能将以电能的形式输送至电网。结合以上分析可知,采用转速优先控制策略的机组将在抽水工况下过渡过程中出现短时功率快速正向变化甚至超调,在发电工况下过渡过程中出现短时功率反调,且后者功率变化幅度将会更大,这是由转子动能的迅速变化及机组自身水力学特性共同决定的。
在Matlab/Simulink中搭建仿真模型,将单台全功率变速抽蓄机组并入无穷大电网,机组额定功率为5 MW,额定转速为600 r/min,上下水库水头差100 m,引水管道总长800 m,电机极对数为2,调速器采样间隔0.01 s,接力器响应时间常数取1.5 s,变流器响应时间常数取10-4 s。在此后的分析中,仿真模型中均采用功率指令绝对值下降的情况,即发电及抽水工况下,在t=150 s时,功率指令的绝对值均由5 MW突变至4.5 MW,均用下标g代表发电工况下机组的工作点,下标p代表抽水工况下机组的工作点。得到机组采用转速优先控制策略时,其过渡过程中工作点的运动轨迹如图10所示,可以发现其与图9中的轨迹走向基本一致,均经历了转速快速调节及功率缓慢调节的过程。
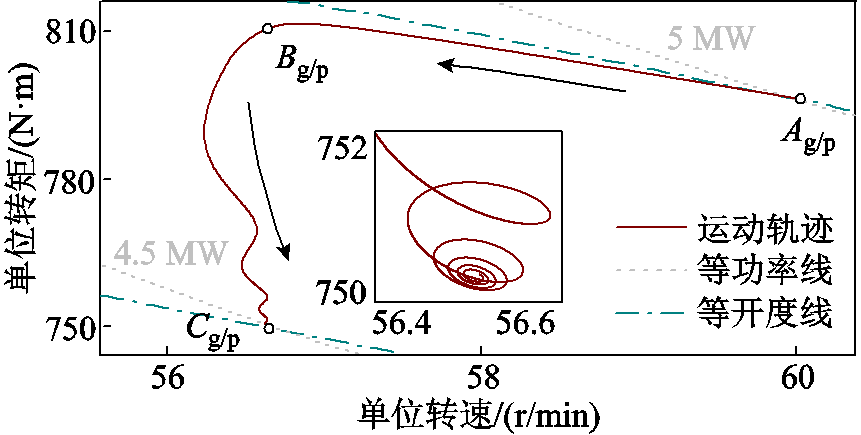
图10 转速优先控制下工作点运动轨迹
Fig.10 Trajectory of the working point under speed priority control
进一步可以得到,采用转速优先控制策略时机组发电及抽水工况下的转速、电磁功率及导叶开度如图11所示。由图11可知,采用转速优先控制策略时,机组在发电及抽水工况下的运行特性是相似的:机组转速在5 s内迅速达到目标转速附近,而导叶开度未发生显著变化,即AgBg或ApBp段与图9中的AB段相对应。此后机组转速基本不变,其功率受导叶开度控制经过60 s左右达到目标功率附近,且伴随小幅低频振荡现象,这在图10中体现为轨迹在Cg/p点附近的多次旋绕,即BgCg或BpCp段(Bg/pCg/p)与图10中的Bg/pCg/p段相对应。发电及抽水工况功率特性的差异主要体现在AgBg段机组电磁功率的短时反调及ApBp段机组电磁功率的短时快速正向变化,这与前文的分析是一致的。
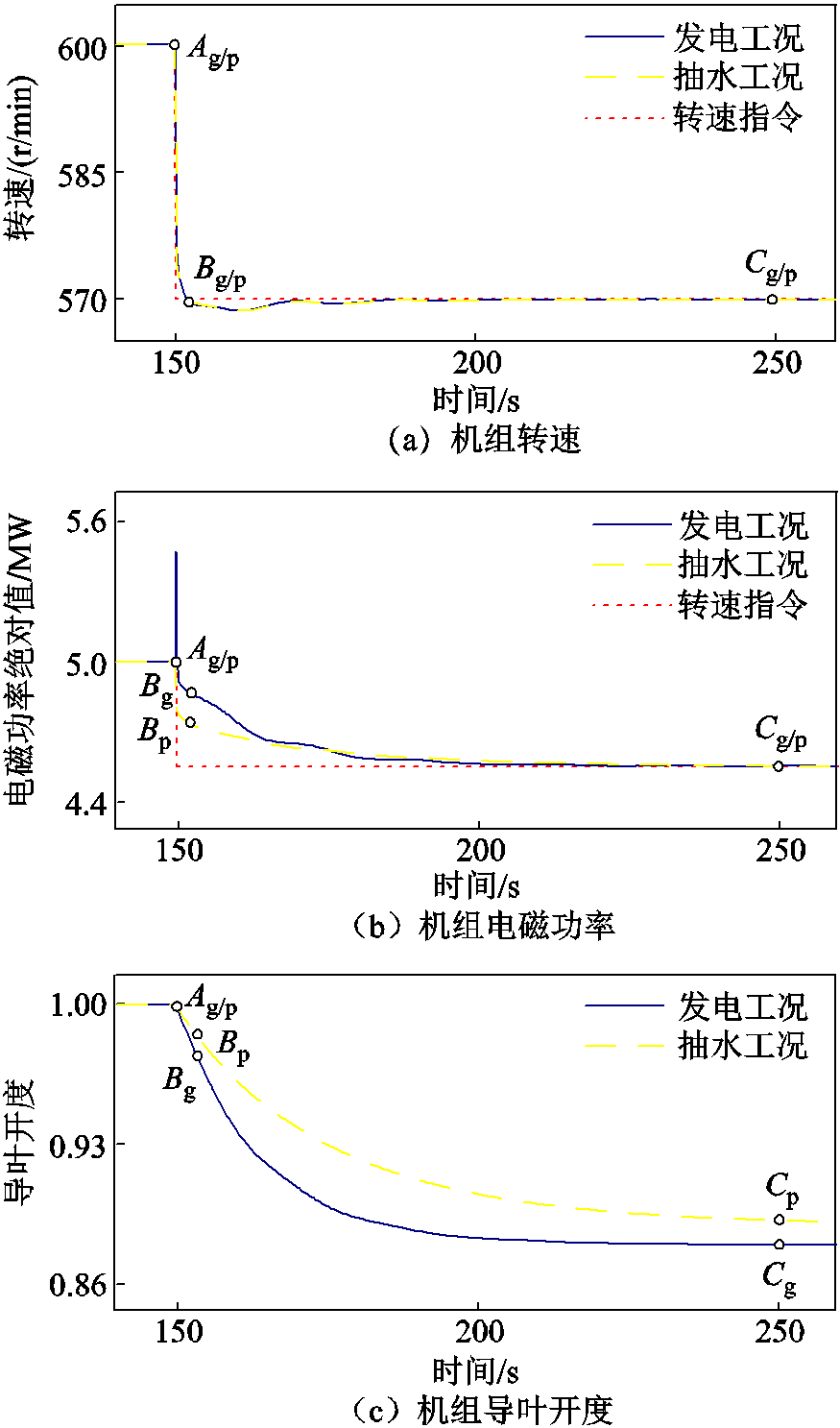
图11 转速优先控制仿真结果
Fig.11 Simulation results under speed priority control
根据图11可知,电磁功率在Ag/pBg/p段的快速变化是采用转速优先控制策略时机组的主要运行风险,这是由于Ag/pBg/p段转速变化过快导致的,在图10中体现为Ag/pBg/p相较Ag/p点对应等开度线的偏离程度,偏离程度越小,则电磁功率变化就越快。
在发电工况下,电磁功率的反调必须尽可能地加以抑制。可采用的常规方法为降低电流环PI参数或限制iq的变化率,这均能在一定程度上抑制功率反调,但无法从根本上解决这一问题。对此可将转速优先控制策略进行适当改进,即将水泵水轮机的机械功率而非电网调度指令输入转速寻优环节,这样就可在不影响功率调节时间的同时基本消除功率的反调现象,且可使机组在过渡过程中始终保持最优转速,进而提升机组的整体效率。采用以上三种方案时,机组工作点运动轨迹及相应指标如图12所示,结果验证了改进转速优先控制策略的优越性。
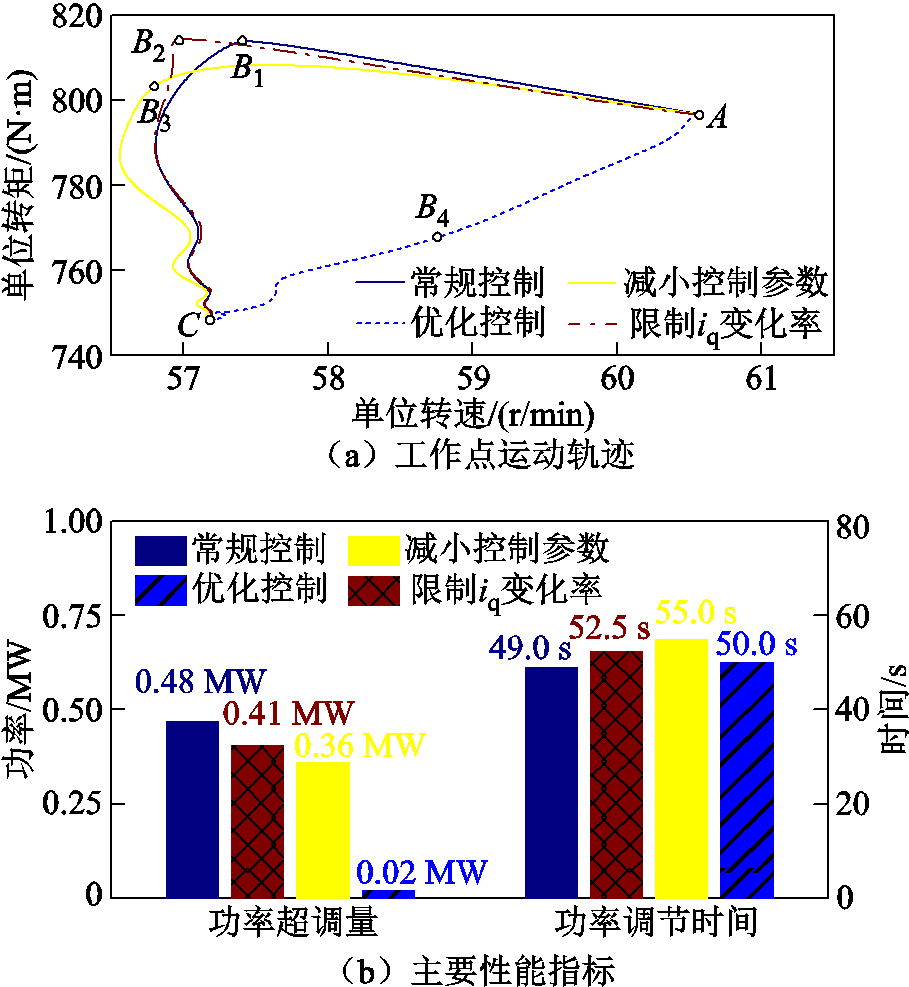
图12 轨迹优化方法及其效果
Fig.12 Trajectory optimization methods and their effect
而在抽水工况下,在不发生功率超调的前提下适当增加Ag/pBg/p段电磁功率的变化量有助于改善机组的功率特性,这只需适当调节变流器比例系数即可,如图13所示。
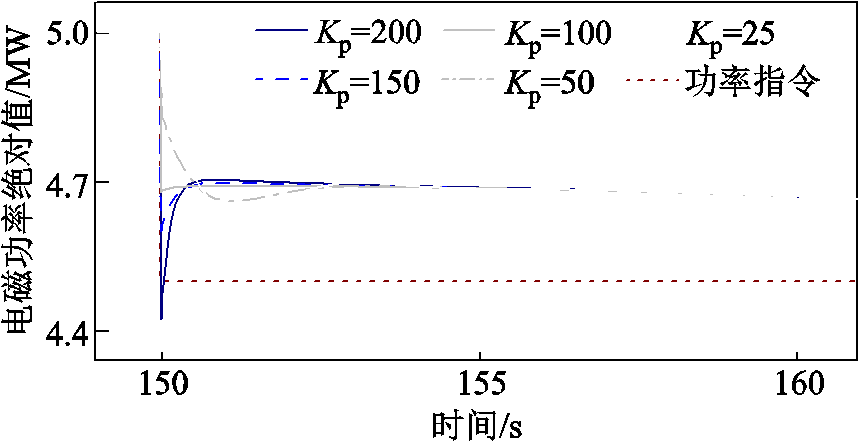
图13 抽水工况下电磁功率与比例系数的关系
Fig.13 The relationship between electromagnetic power and proportional coefficient in pumping condition
功率优先控制的整体控制框图如图14所示。机组接收电网调度指令后,经转速寻优算法得到转速指令并送至调速器,同时将功率指令送至机侧变流器,变流器迅速完成功率的调节,而调速器较为缓慢地实现转速的调节。
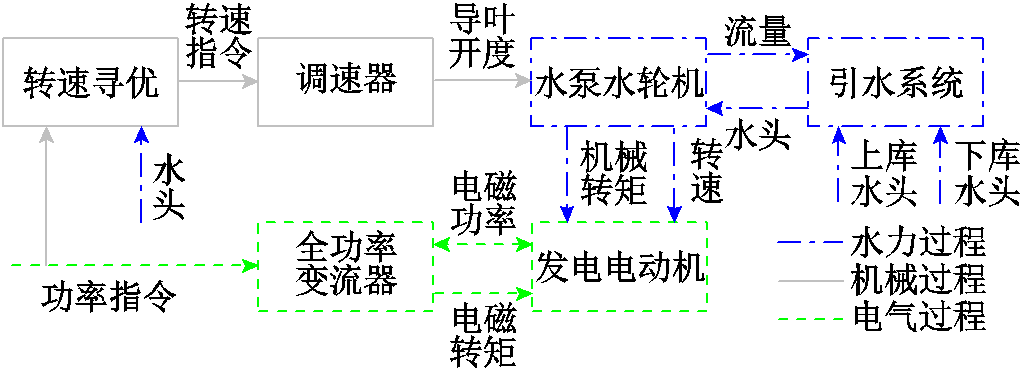
图14 功率优先控制框图
Fig.14 Power priority control diagram
由于机组转速受调速器控制,其变化较为缓慢,因此机组的运行特性较为复杂。此外,电机的恒功率控制在发电工况下存在潜在的转速正反馈,而在抽水工况下则体现为转速的负反馈,因此机组在发电及抽水工况下的运行特性将存在较大的差异。
发电工况下,功率优先控制过渡过程中机组工作点的轨迹如图15所示,出力调节前机组稳定运行于A点,接收调度指令后,变流器快速将功率降至新的指令值,即机组工作点快速运动到B点,此时转速及机械转矩变化较小,电磁转矩上升,因此机组开始沿BC段加速,且在加速过程中,受变流器恒功率控制的影响,机组电磁转矩进一步减小,若导叶不能及时动作以快速降低机械转矩,这一加速过程将形成正反馈进而直接导致机组沿曲线CE加速直至失稳。若导叶及时动作使机组在C点停止加速,此后机组工作点将沿曲线CD移动,并最终稳定在D点,完成出力的调节。综上所述,发电工况下功率优先控制策略虽然能够实现功率的快速调节,但出现了转速反调及开度超调两个固有现象,这将导致机组存在一定的失稳风险。
设置与第2小节相同的仿真条件,并适当增大机组整体转动惯量,可以得到采用功率优先控制策略时,机组发电工况下过渡过程中工作点的运动轨迹如图16所示。由图16可知,运动轨迹的整体走向与图15中的分析基本一致,均经历了功率快速调节及转速缓慢调节的过程。
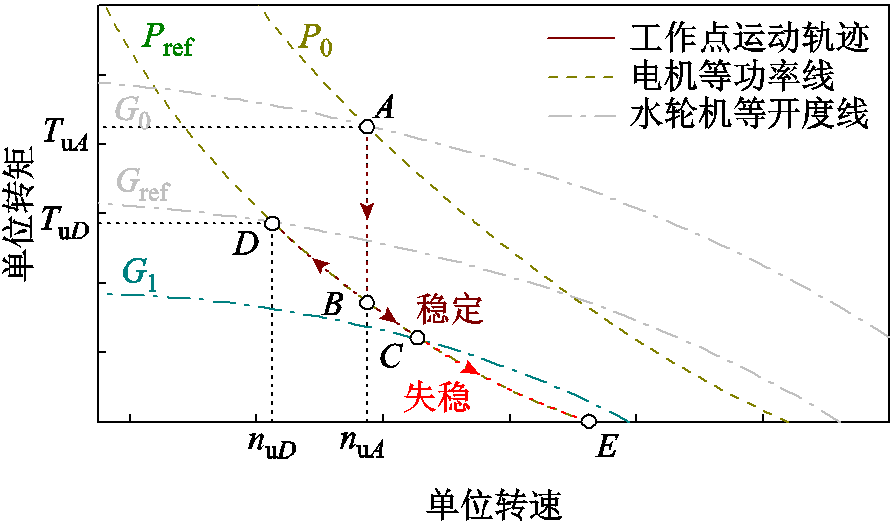
图15 发电工况下功率优先控制过渡过程
Fig.15 Transition process underpower priority controlin generating condition
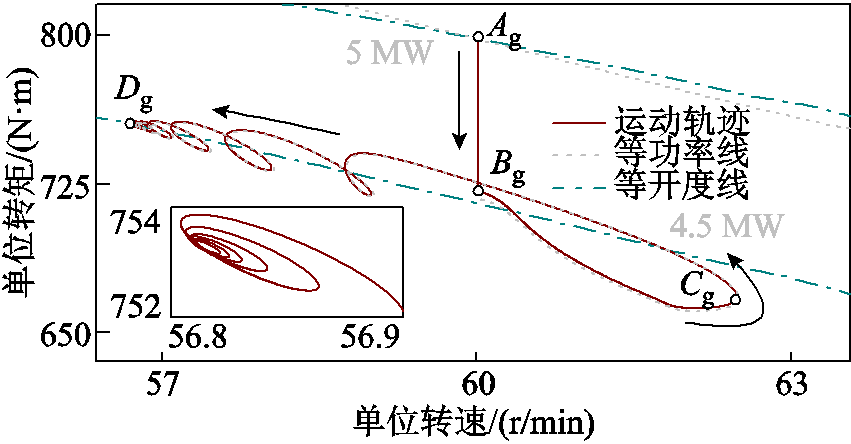
图16 发电工况下功率优先控制工作点运动轨迹
Fig.16 Trajectory of the working point under power priority control in generating condition
进一步可以得到,采用功率优先控制策略时,机组发电工况下的转速、电磁功率及导叶开度的波形如图17所示。由图17可知,机组电磁功率在5 s内迅速达到目标功率附近。此后转速发生反调,导叶开度继续下降以遏制转速的增加,二者几乎同时达到极值点,即BgCg段与图16中的BgCg段相对应。转速到达峰值后,其受导叶开度的控制缓慢到达目标转速且伴随小幅低频振荡,并且由于机械转矩的波动,导叶开度也存在小幅振荡现象,而机组电磁功率保持不变,即CgDg段与图16中的CgDg段相对应,这与前文的分析是一致的。
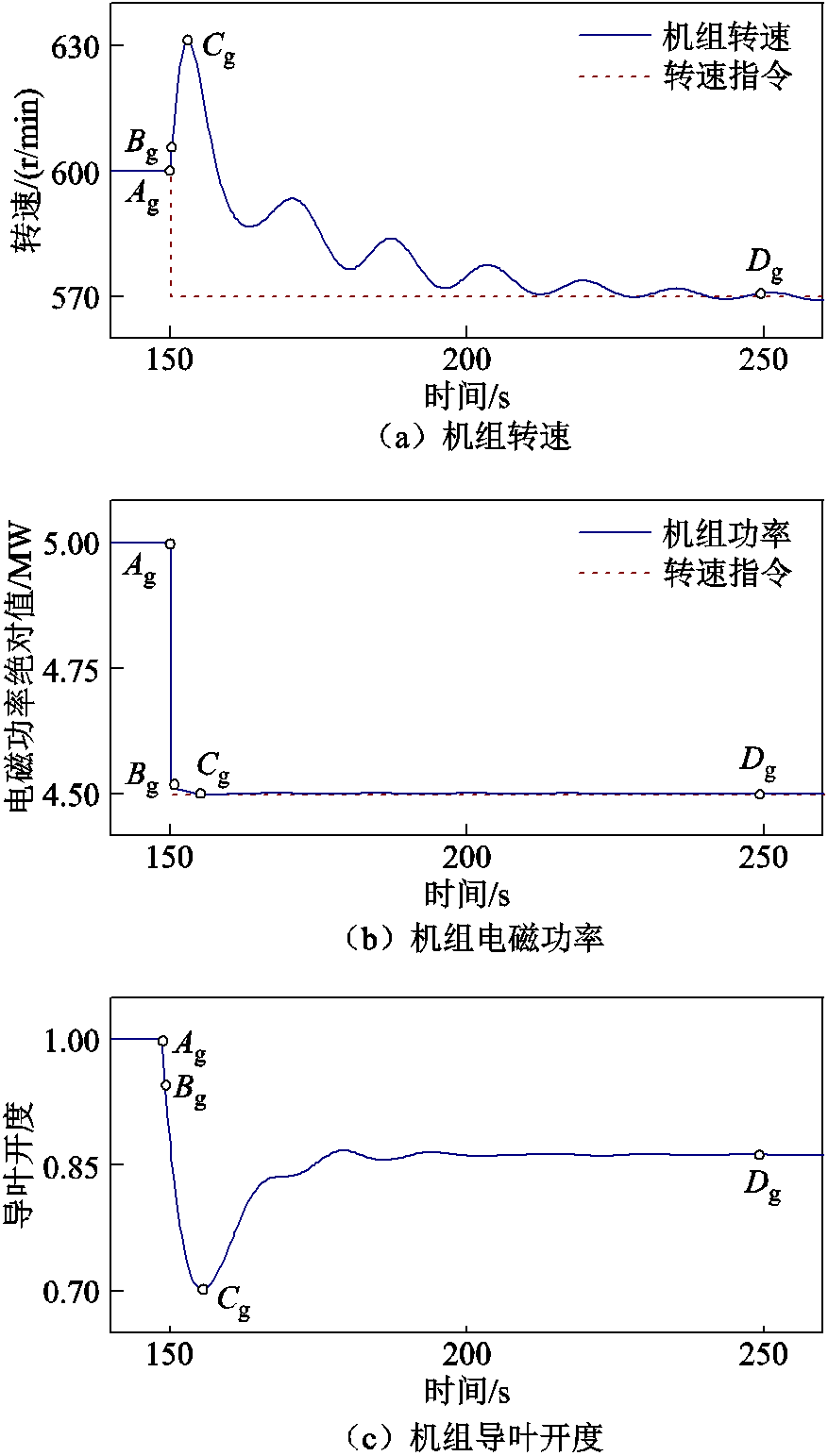
图17 发电工况下功率优先控制仿真结果
Fig.17 Simulation results in generating condition under power priority control
采用功率优先控制策略时,变流器主要作用为在AB段将工作点拖动到新的等功率线上,因此机组在后续BCD段的运行特性主要受到调速器PI参数的影响。调速器控制参数对机组运行特性的影响如图18所示。调速器比例系数主要影响转速的反调量,较小的比例系数可能导致机组失稳,此外随着比例系数的增加,转速达到稳态的时间及其低频振荡幅值也略有增加。而调速器积分系数主要影响转速达到稳态的时间,较小的积分系数可能导致机组过渡过程时间过长,此外随着积分系数的增加,转速低频振荡幅值略有增加,转速反调量则略有降低。在本算例中,较优的控制参数组合是Kp=0.04,Ki=0.001。
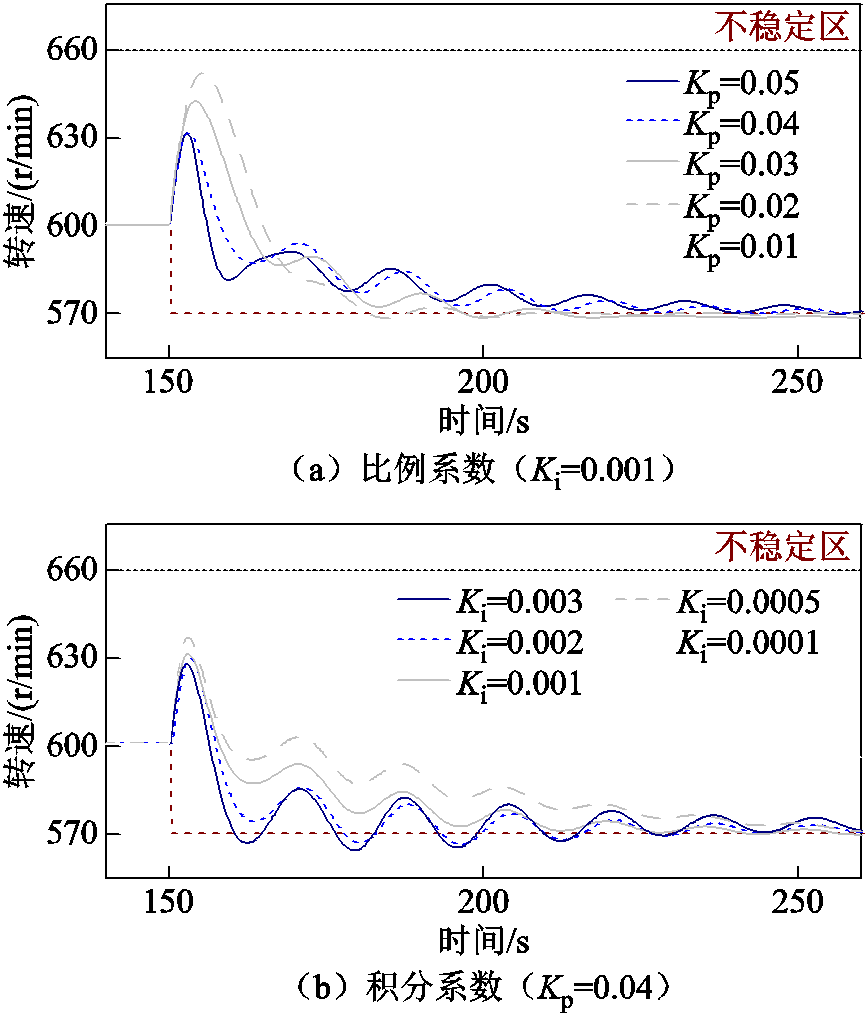
图18 调速器控制参数对机组运行特性的影响
Fig.18 Effect of governor control parameters on operating characteristics of the unit
在抽水工况下,过渡过程中机组工作点的轨迹如图19所示。出力调节前机组稳定运行于A点,机组接收调度指令后,变流器快速将电磁功率降至新的指令值,即机组工作点快速运动到B点,此时机械转矩几乎不变而电磁转矩上升,因此机组开始沿BC段减速,而在减速过程中,受变流器恒功率控制的影响,机组电磁转矩将逐渐增大,其自身构成负反馈过程,最终在调速器的控制下转速稳定于C点,完成出力的调节。因此采用功率优先控制的机组在抽水工况下基本不存在失稳隐患,且无转速反调及开度超调现象。
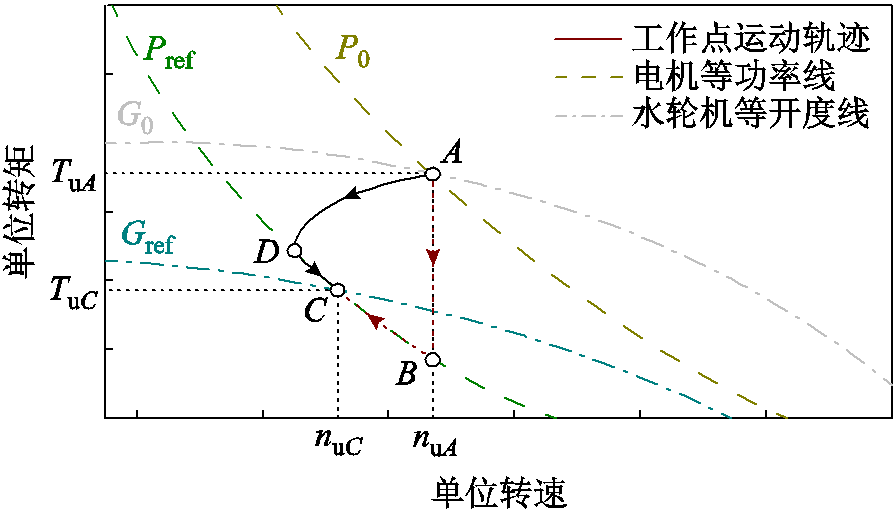
图19 抽水工况下功率优先控制过渡过程
Fig.19 Transition process under power priority controlinpumping condition
然而,在变流器快速调节功率的过程中,由于电磁转矩的迅速变化,机组转速也可能发生较大幅度的变化,甚至可能低于新的最优转速,即如图19中实线AC所示,机组先沿AD段快速减速,随后沿着等功率线DC缓慢移动到C点,完成出力的调节。
设置与第2小节相同的仿真条件,可以得到采用功率优先控制策略时,机组抽水工况下过渡过程中工作点的运动轨迹如图20所示。由图20可知,其与图19中的轨迹走向基本一致,均经历了功率及转速同向快速变化及转速的缓慢回拉过程。

图20 抽水工况下功率优先控制工作点运动轨迹
Fig.20 Trajectory of the working point under power priority control in pumping condition
进一步可以得到,采用功率优先控制策略时,机组在抽水工况下的转速、电磁功率及导叶开度的波形如图21所示。由图可知,机组电磁功率在5 s内迅速达到目标功率附近,其转速也随之迅速变化甚至发生了超调现象,即ApDp段与图19中的AD段相对应。此后机组电磁功率保持不变,转速受导叶开度的控制缓慢回到目标转速,且伴随小幅低频振荡,即DpCp段与图19中的DC段相对应,这与前文的分析是一致的。
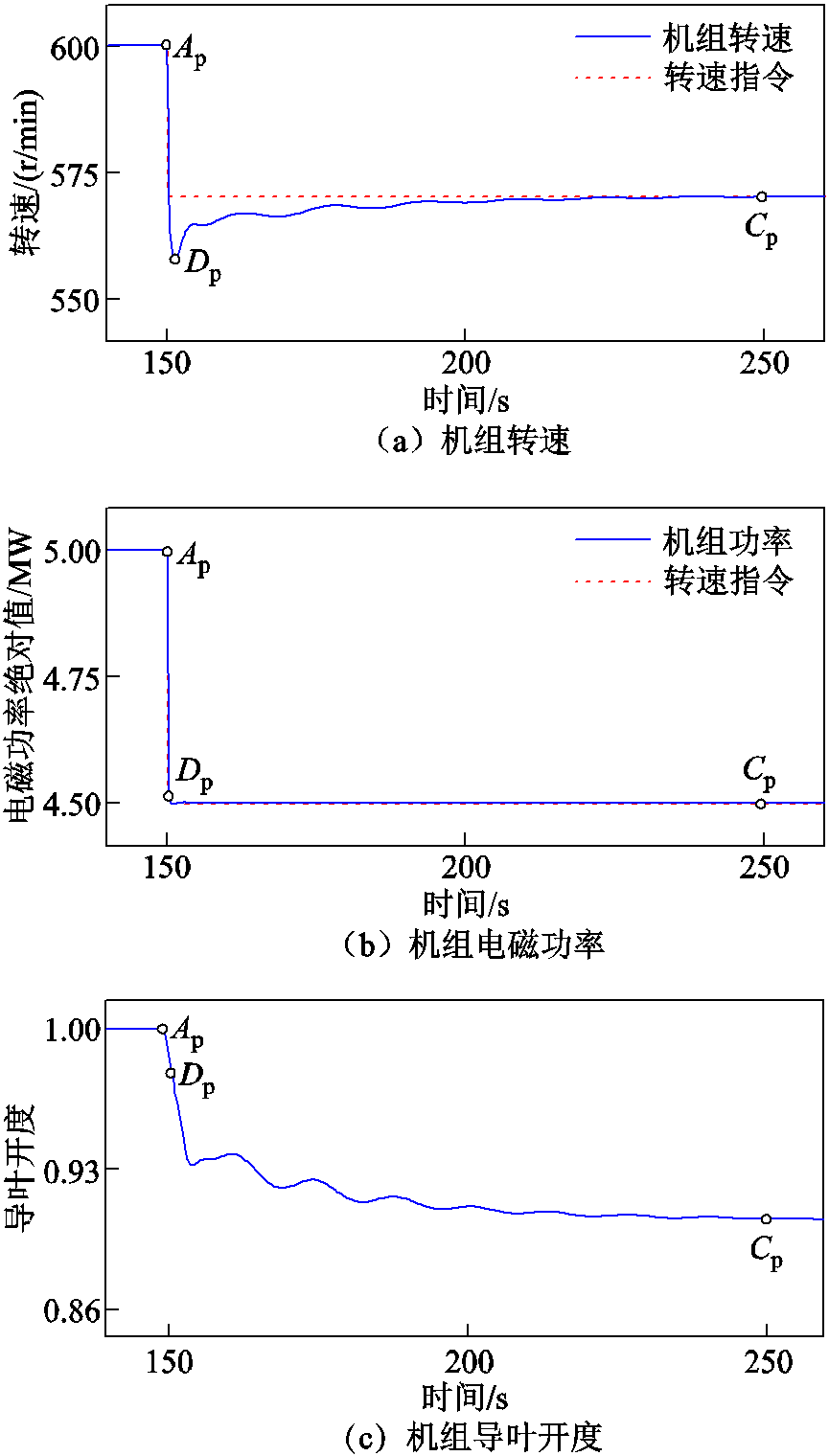
图21 抽水工况下功率优先控制仿真结果
Fig.21 Simulation results in pumping condition under power priority control
由于AB段导叶开度变化较小,因此近似认为此时水泵水轮机机械转矩只受转速影响,机组的转子运动方程可以近似表述为
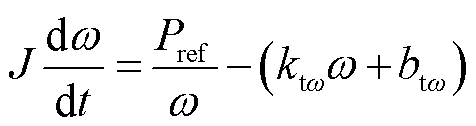 (10)
(10)
式中, 为参考功率;ktω与btω为待定系数。当转速到达极值时,等式左侧为0,可以解得D点对应转速如式(11)所示,抽水工况下ktω为正值保证了解的存在。
为参考功率;ktω与btω为待定系数。当转速到达极值时,等式左侧为0,可以解得D点对应转速如式(11)所示,抽水工况下ktω为正值保证了解的存在。
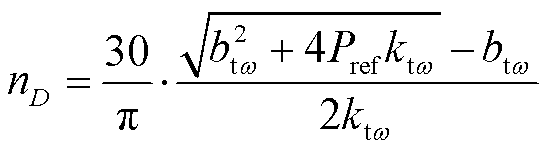 (11)
(11)
改变功率指令,得到D点转速计算值、测量值及最优转速的关系如图22所示,结果证明了式(11)的准确性。因此D点转速主要与水泵水轮机参数及功率指令有关,控制参数对其影响较小,而转速是否发生超调则取决于最优转速与 的大小关系,同样与控制参数基本无关。
的大小关系,同样与控制参数基本无关。
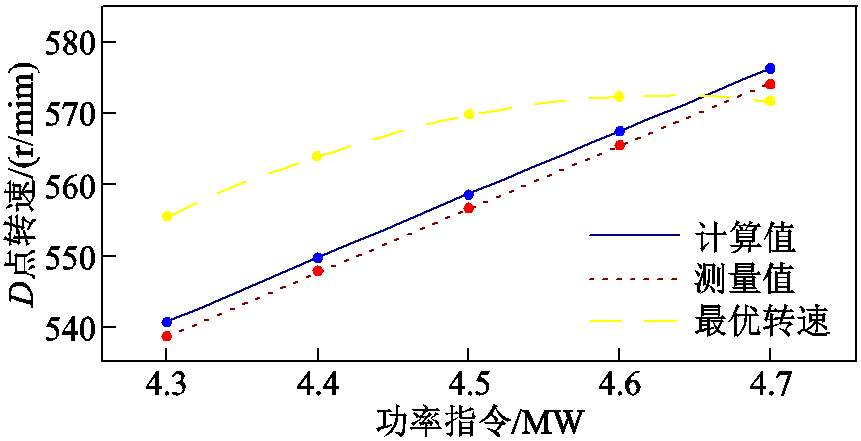
图22 D点转速的计算值与测量值
Fig.22 Calculated value and measured value of
从第2节、第3节的仿真结果可以得知,不同控制策略下的机组出现了不同模态的振荡现象,而造成这种不一致的根本原因是不同控制策略下水锤效应的传递路径的不同,如图23所示。在转速优先控制下,机组转速较为稳定,而水锤效应将导致较长时间的机械转矩振荡,这主要体现为图10中C点附近工作点轨迹的多次小幅旋绕,全功率变流器将其转化为电磁功率的振荡并输入电网;而在功率优先控制下,机组的电磁功率较为稳定,机械转矩的波动将引发转速的波动,这主要体现为图16中BgCg段运动轨迹的大幅旋绕及图20中运动轨迹在Cp点附近的多次小幅旋绕。即转速优先控制下,水锤效应经由全功率变流器传递至电网,而功率优先控制下,水锤效应基本被全功率变流器隔离,使其只能作用于轴系,而轴系两端转矩的不平衡将引发转速的波动。
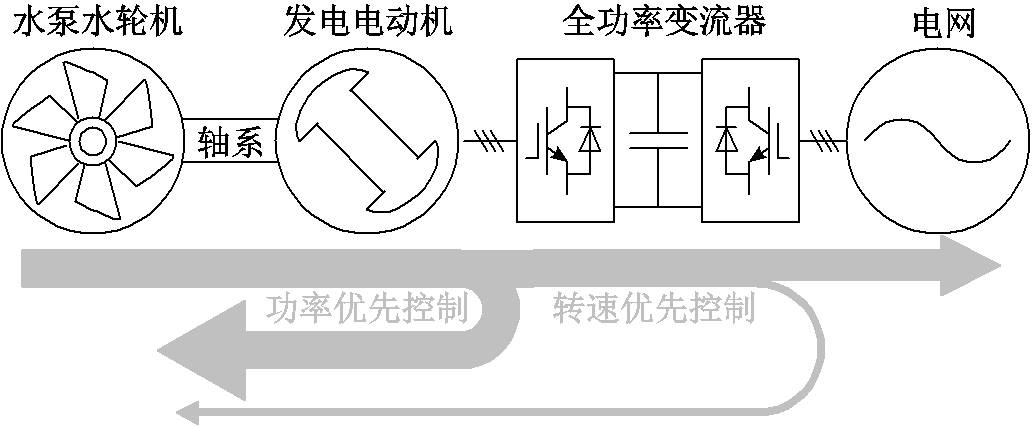
图23 不同控制策略下水锤效应的传递路径
Fig.23 Transmission path of water hammer effect under different control strategies
此外,过渡过程中轴系两端的不平衡转矩可能导致轴系的疲劳乃至受损,这是功率优先控制面临的主要风险。而结合以上分析可知,发电工况下采用功率优先控制时,机组过渡过程中将经历多次加减速过程,因此这一过程是轴系损伤的主要来源。在与第2节相同的仿真条件下,对比发电工况下采用两种控制策略的机组轴系两端的不平衡转矩情况,结果如图24所示。由图24可知,转速优先控制下轴系两端不平衡转矩呈现单个尖峰的形式,而功率优先控制下,轴系两端不平衡转矩将多次反向,二者不平衡转矩峰值较为接近,但前者不平衡转矩的作用时间远小于后者,因此对于大中型全功率变速抽蓄机组,功率优先控制带来的轴系损伤风险应予以重点考虑。
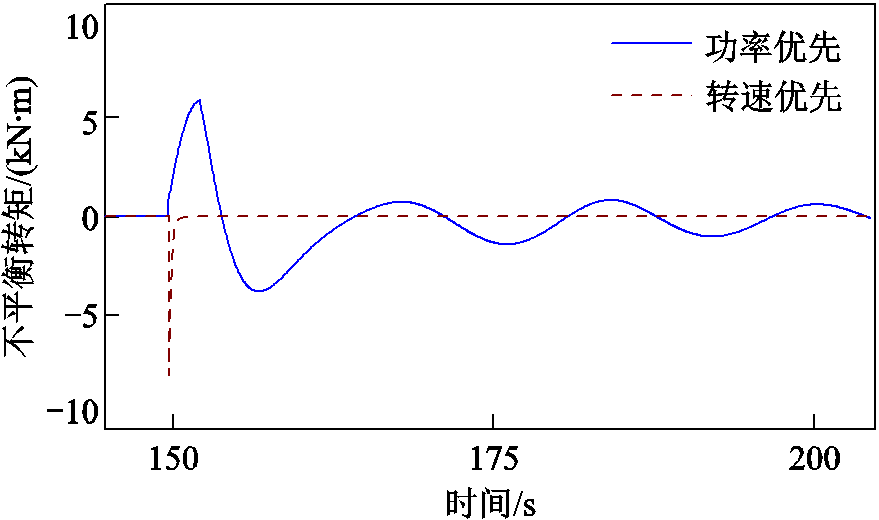
图24 发电工况下轴系两端不平衡转矩
Fig.24 Unbalanced torqueat both ends of shafting under generating condition
综上所述,可以总结得到各控制策略及各工况下全功率变速抽蓄机组功率特性及潜在运行风险见表2。其中,两种控制策略下机组功率调节时间不同的根本原因是调速器及变流器响应时间的差异;两种控制策略下机组振荡模态不同的根本原因是水锤效应传递路径的差异;而采用功率优先控制策略时发电及抽水工况下功率特性不同的根本原因是机组转速反馈类型的差异。
表2 全功率变速抽蓄机组功率特性总结
Tab.2 Summary of power characteristics of full-power VSPS
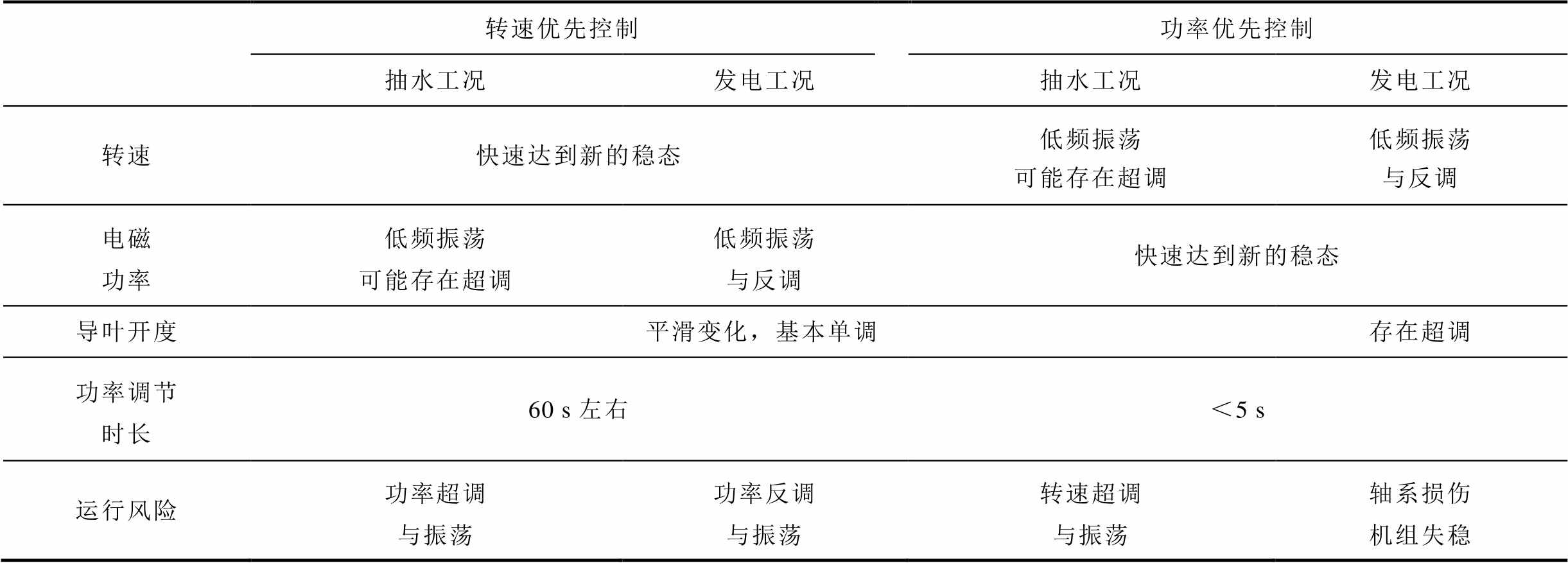
转速优先控制功率优先控制 抽水工况发电工况抽水工况发电工况 转速快速达到新的稳态低频振荡可能存在超调低频振荡与反调 电磁功率低频振荡可能存在超调低频振荡与反调快速达到新的稳态 导叶开度平滑变化,基本单调存在超调 功率调节时长60 s左右<5 s 运行风险功率超调与振荡功率反调与振荡转速超调与振荡轴系损伤机组失稳
针对全功率变速抽蓄机组整体模型缺乏,功率响应特性认识不足等问题,本文建立了全功率变速抽蓄机组水-机-电联合仿真模型,提出了基于特性曲线分析机组功率特性的研究方法,并据此分析了采用转速优先控制及功率优先控制时机组的运行特性及其主要影响因素。基于理论分析及仿真验证,可以得出以下结论:
1)采用转速优先控制时,抽水及发电工况下机组转速与电磁功率的变化规律基本一致,即转速快速达到稳态,功率缓慢完成调节且存在小幅低频振荡。由于过渡过程初期转子动能的迅速变化及机组自身水力学特性,采用该控制策略的机组在发电工况下将出现电磁功率的反调,在抽水工况下将出现电磁功率短时快速的正向变化甚至超调。前者需要重点加以抑制,较优的方法为将水泵水轮机机械功率代替电网调度指令输入转速寻优环节;后者加以适当利用,只需适当调节变流器PI参数。
2)采用功率优先控制时,机组在抽水及发电工况下的运行特性存在较大差异,其根本原因在于电机的恒功率控制在发电工况存在转速的潜在正反馈,而在抽水工况下存在转速的负反馈。在发电工况下,机组电磁功率快速达到稳态,但其转速将发生反调及小幅低频振荡现象,且导叶开度将发生超调,二者是该工况下的固有现象,这使得机组存在潜在的失稳风险。转速的反调及振荡主要受调速器PI参数影响,比例系数主要影响转速反调幅值,积分系数主要影响转速达到稳态的时间,选取适当的控制参数可以减少转速的振荡(本算例中Kp=0.04,Ki=0.001),但由于水锤效应的存在,振荡不能完全消除。
3)采用功率优先控制时,在抽水工况下,机组电磁功率快速达到稳态,其运动轨迹拐点对应的转速主要取决于电网调度指令及水泵水轮机自身参数,而与各控制参数基本无关。该工况下可能存在转速的超调现象。
4)不同控制模式下水锤效应传递路径的不同导致机组振荡模态的不同。转速优先控制下,水锤效应经由变流器传递至电网,因此机组转速较为平稳,而电磁功率存在振荡现象;功率优先控制下,变流器阻碍了水锤效应向电网的传递,水锤效应将反作用于轴系,导致转速的振荡并在发电工况下加剧轴系的损伤。
附 录
式(4)中各项的表达式为[19]
参考文献
[1] 谢小荣, 马宁嘉, 刘威, 等. 新型电力系统中储能应用功能的综述与展望[J]. 中国电机工程学报, 2023, 43(1): 158-168.
Xie Xiaorong, Ma Ningjia, Liu Wei, et al. Functions of energy storage in renewable energy dominated power systems: review and prospect[J]. Proceedings of the CSEE, 2023, 43(1): 158-168.
[2] 吴珊, 边晓燕, 张菁娴, 等. 面向新型电力系统灵活性提升的国内外辅助服务市场研究综述[J]. 电工技术学报, 2023, 38(6): 1662-1677.
Wu Shan, Bian Xiaoyan, Zhang Jingxian, et al. A review of domestic and foreign ancillary services market for improving flexibility of new power system[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1662-1677.
[3] 陈超, 汪卫平, 刘海滨, 等. 全功率变速抽水蓄能机组用于提升电网频率稳定性控制策略研究[J]. 水电与抽水蓄能, 2020, 6(5): 68-72.
Chen Chao, Wang Weiping, Liu Haibin, et al. Study on the control strategy of FSC-VSPS for improving the frequency stability of power grid[J]. Hydropower and Pumped Storage, 2020, 6(5): 68-72.
[4] 范博然, 王奎, 李永东, 等. 基于模块化多电平矩阵变流器的可调速抽水蓄能系统[J]. 电工技术学报, 2018, 33(增刊2): 511-518.
Fan Boran, Wang Kui, Li Yongdong, et al. Adjustable speed pumped storage system based on modular multilevel matrix converter[J]. Transactions of China Electrotechnical Society, 2018, 33(S2): 511-518.
[5] 龚旋, 刘宇, 刘健, 等. 考虑交流电网安全约束的柔直-抽蓄-火电联合调度计划模型[J]. 电网技术, 2023, 47(7): 2755-2763.
Gong Xuan, Liu Yu, Liu Jian, et al. Joint dispatching model of flexible DC grid-pumped storage hydropower plants-thermal power plants considering security constraints of AC power grid[J]. Power System Technology, 2023, 47(7): 2755-2763.
[6] 曹敏健, 胡泽春, 孟颖, 等. 含抽蓄电站与新能源发电的柔性直流系统日前优化调度方法[J]. 电力系统自动化, 2021, 45(15): 36-44.
Cao Minjian, Hu Zechun, Meng Ying, et al. Day-ahead optimal dispatch method for flexible DC system with pumped storage hydropower plant and new energy power generation[J]. Automation of Electric Power Systems, 2021, 45(15): 36-44.
[7] 丁理杰, 史华勃, 陈刚, 等. 全功率变速抽水蓄能机组控制策略与调节特性[J].电力自动化设备, 2024, 44(3): 166-171, 179.
Ding Lijie, Shi Huabo, Chen Gang, et al. Control strategy and regulation characteristics of variable speed pumped storage unit with full-size converter[J]. Electric Power Automation Equipment, 2024, 44(3): 166-171, 179.
[8] Zhao Zhigao, Yang Jiandong, Yang Weijia, et al. A coordinated optimization framework for flexible operation of pumped storage hydropower system: nonlinear modeling, strategy optimization and decision making[J]. Energy Conversion and Management, 2019, 194: 75-93.
[9] Yang Weijia, Norrlund P, Chung C Y, et al. Eigen-analysis of hydraulic-mechanical-electrical coupling mechanism for small signal stability of hydropower plant[J]. Renewable Energy, 2018, 115: 1014-1025.
[10] 庄凯勋, 孙建军, 丁理杰, 等. 提升双馈变速抽水蓄能机组频率响应特性的控制策略[J]. 电工技术学报, 2023, 38(23): 6292-6304.
Chuang Kaihsun, Sun Jianjun, Ding Lijie, et al. A control strategy with improved frequency response characteristics of variable speed DFIM pumped storage[J]. Transactions of China Electrotechnical Society, 2023, 38(23): 6292-6304.
[11] 陈亚红, 邓长虹, 刘玉杰, 等. 抽水工况双馈可变速抽蓄机组机电暂态建模及有功-频率耦合特性[J]. 中国电机工程学报, 2022, 42(3): 942-957.
Chen Yahong, Deng Changhong, Liu Yujie, et al. Electromechanical transient modelling and active power-frequency coupling characteristics of doubly-fed variable speed pumped storage under pumping mode[J]. Proceedings of the CSEE, 2022, 42(3): 942-957.
[12] Chen Yahong, Xu Wei, Liu Yi, et al. Modeling and transient response analysis of doubly-fed variable speed pumped storage unit in pumping mode[J]. IEEE Transactions on Industrial Electronics, 2023, 70(10): 9935-9947.
[13] Chen Yahong, Xu Wei, Liu Yi, et al. Small-signal system frequency stability analysis of the power grid integrated with type-II doubly-fed variable speed pumped storage[J]. IEEE Transactions on Energy Conversion, 2023, 38(1): 611-623.
[14] Chen Yahong, Xu Wei, Liu Yi, et al. Reduced-order system frequency response modeling for the power grid integrated with the type-II doubly-fed variable speed pumped storage units[J]. IEEE Transactions on Power Electronics, 2022, 37(9): 10994-11006.
[15] 史华勃, 王渝红, 滕予非, 等. 全功率变速抽水蓄能机组快速功率模式小信号建模[J]. 电力系统自动化, 2022, 46(4): 162-169.
Shi Huabo, Wang Yuhong, Teng Yufei, et al. Small signal modeling of variable-speed pumped storage unit with full-size converter in fast-power mode[J]. Automation of Electric Power Systems, 2022, 46(4): 162-169.
[16] 杨正文. 全功率变速恒频抽蓄机组VSG控制策略研究[D]. 北京: 北京交通大学, 2021.
Yang Zhengwen. Virtual synchronous generator control of variable speed pumped-storage unit with full-size converter[D]. Beijing: Beijing Jiaotong University, 2021.
[17] 马小亮. 变频器新应用——变速抽水蓄能水电机组[J]. 电气传动, 2022, 52(2): 3-10.
Ma Xiaoliang. New applications of frequency converters——variable speed pumped-storage hydraulicpower facilities[J]. Electric Drive, 2022, 52(2): 3-10.
[18] 闫伟, 石祥建, 施一峰, 等. 交流励磁可变速抽蓄机组控制策略研究[J]. 大电机技术, 2020(6): 84-90.
Yan Wei, Shi Xiangjian, Shi Yifeng, et al. Research on unit control strategy of AC excitation variable speed pump storage unit[J]. Large Electric Machine and Hydraulic Turbine, 2020(6): 84-90.
[19] Zhao Zhigao, Yang Jiandong, Chung C Y, et al. Performance enhancement of pumped storage units for system frequency support based on a novel small signal model[J]. Energy, 2021, 234: 121207.
[20] 李吉庆. 变速抽水蓄能机组水泵工况逆流现象及抑制策略[D]. 西安: 西安理工大学, 2023.
Li Jiqing. Countercurrent phenomenon of pump condition in variable speed pumped storage unit and its suppression strategy[D]. Xi’an: Xi’an University of Technology, 2023.
[21] 冯陈, 周大庆, 郑源, 等. 基于精细化建模的抽水蓄能机组低水头背靠背启动多目标优化[J]. 中国电机工程学报, 2023, 43(8): 3059-3071.
Feng Chen, Zhou Daqing, Zheng Yuan, et al. Multi-objective optimization of back-to-back starting process for pumped storage units at low head area based on refined model[J].Proceedings of the CSEE,2023, 43(8): 3059-3071.
[22] 杨欣. 水泵水轮机全特性空间曲面描述与水力过渡过程调节控制研究[D]. 武汉: 华中科技大学, 2012.
Yang Xin. Deal on characteristic curves of pump-turbine & study on the regulating control of hydraulic transients[D]. Wuhan: Huazhong University of Science and Technology, 2012.
[23] 陈亚红, 邓长虹, 武荷月, 等. 发电工况可变速抽蓄机组模式切换过程多阶段柔性协调控制[J]. 中国电机工程学报, 2021, 41(15): 5258-5274.
Chen Yahong, Deng Changhong, Wu Heyue, et al. Multi-stage soft coordinated control of variable speed pumped storage unit in the process of mode conversion under the generation condition[J]. Proceedings of the CSEE, 2021, 41(15): 5258-5274.
Research on Power Characteristics of Full-Power Variable Speed Pumped Storage Units Based on Hydraulic-Mechanical-Electrical Modeling
Abstract As the most mature and most economical energy storage technology at present, pumped storage has become an important means to ensure the safe and stable operation of new power systems. Among them, full-power variable speed pumped storage units (Full-power VSPS) are the most potential due to their excellent comprehensive performance and gradually reducing costs. However, the current research on Full-power VSPS is still in its infancy. The complex physical process of hydraulic-mechanical-electrical coupling within the unit and the unit's ability to respond to grid dispatching instructions under different control strategies is not yet fully understood.
In response to the above problems, this paper carries out relevant research on the modeling and power characteristics analysis of Full-power VSPS. First, this paper uses the sub-module modeling method to establish the transfer function model of the water diversion system with double surge tanks, the characteristic curve model of the pump turbine, and the simplified model of the generator motor and full-power converter, and finally obtains the unit hydraulic-mechanical-electrical joint simulation model.
Subsequently, this paper summarizes the two most basic control strategies for Full-power VSPS, namely speed priority control and power priority control. On the basis of the unit characteristic curve, the movement trajectory of the unit's working point under pumping and generating conditions is given when the above two control strategies are used, and the changing rules of the unit'sspeed, electromagnetic power and guide vane opening are qualitatively analyzed.
When the speed priority control strategy is adopted, the speed of the unit quickly reaches the new steady state, while the electromagnetic power changes rapidly at first and then slowly. In the period of rapid change, the power undershoot will occur under generating condition, which must be suppressed. A feasible suppression method is to input the mechanical power of the pump turbine instead of the power grid dispatching instruction into the speed optimizer. However, the power overshoot may occur under pumping condition, which can be prevented by setting a reasonable proportion coefficient of the MSC.
When the power priority control strategy is adopted, the electromagnetic power of the unit quickly reaches the new steady state. However, due to the different forms of speed feedback, there are great differences between the operation characteristics of the unit under pumping and generating condition. Under the generating condition, due to the potential positive feedback of the speed, the unit will have two inherent phenomena: the speed undershoot and the guide vane overshoot. Thespeed undershoot brings the risk of instability to the unit, and the restraining method is to set reasonable governor PI parameters.
While under pumping condition, due to the negative feedback of the speed, the risk of instability of the unit is low, but the speed will change rapidly at the initial stage of the transition process, and the speed overshoot may occur. In this paper, an approximate formula for calculating the speed at the trajectory inflection point is given, and it is pointed out that whether the rotational speed overshoot occurs or not depends mainly on the design parameters of the unit and has little relationship with the control parameters.
Finally, this paper points out that the main reason for the difference of unit oscillation modes under the two control strategies is the different transfer path of water hammer effect. Combined with the above analysis, the power characteristics and the potential operational risk of the units utilizing the two basic control strategies under pumping and generating conditions are summarized.
Keywords:Full-power variable speed pumped storage unit, hydraulic-mechanical-electric joint simulation, speed priority control, power priority control, power characteristic
中图分类号:TM312
DOI: 10.19595/j.cnki.1000-6753.tces.240075
国家电网公司总部科技项目资助(SGSCDK00XTJS2200250)。
收稿日期 2024-01-10
改稿日期 2024-04-17
栾一航 男,2001年生,博士研究生,研究方向为抽水蓄能机组建模及分析,磁场调制电机设计、分析与优化。
E-mail:yh_luan@whu.edu.cn
张远志 男,1995年生,博士(后),研究方向为磁场调制电机设计、分析与优化等。
E-mail:yz_zhang@whu.edu.cn(通信作者)
(编辑 郭丽军)