图1 直流微电网的结构
Fig.1 Structure of the DC microgrid
摘要 直流微电网稳态工作点切换、负荷变化较大时经常会出现暂态失稳现象,属于比较典型的“大信号失稳”工况,传统基于小信号的解决方法难以应对。为此,该文提出一种考虑类虚拟同步发电机(AVSG)控制参数和柔性负荷灵活调节的稳定控制方法。首先建立直流微电网的Takagi-Sugeno(TS)模糊模型。然后,借助线性矩阵不等式(LMI)工具构建Lyapunov函数以估计目标稳态点的吸引域。若目标稳态点的最大估计吸引域(LEDA)包含初始稳态点,则系统是渐近稳定的;否则存在失稳的风险。此时,利用灵活可调的虚拟阻尼、虚拟惯量和柔性负荷等资源,让目标稳态点的LEDA直接或者间接包含初始稳态点,从而消除振荡失稳的风险。研究结果表明:基于吸引域理论改进虚拟阻尼和虚拟惯量等控制参数以及工作点运行轨迹,是一种实用且有效保障系统稳定运行的方法。最后,通过硬件在环仿真(HIL)进行了验证。
关键词:直流微电网 大信号稳定 吸引域估计 类虚拟同步发电机 柔性负荷
直流微电网是新型电力系统的重要组成部分,对新能源的消纳起到关键作用[1-3]。为保障直流微电网的稳定运行,学术界开展了大量关于小信号建模及稳定性分析的研究工作[4-6]。然而,小信号分析的结论仅在局部范围内有效,并且该范围的大小并不确定,基于小信号的方法难以解决直流微电网大扰动失稳的问题[7-9]。系统由初始稳态点切换至目标稳态点,负荷变化较大时,经常出现振荡失稳的现象。在此情况下,研究直流微电网大扰动下的稳定运行方法具有重要意义。
因此,国内外学者提出了多种改善直流微电网大信号稳定性的方法[10-14]。其中,大扰动主要是指能导致系统失稳的大负荷扰动,由于故障下变流器常处于限流模式,或因触发设备保护而退出运行,故而难以通过改变控制结构或控制参数提升系统的稳定性。文献[11]在直流微电网中引入补偿电路,通过有源阻尼控制改善系统的大信号稳定性,并比较了不同接入点对系统稳定性的影响,但增加硬件设施的解决方案成本较高,难以大规模推广应用。文献[12-13]利用线性自抗扰控制技术改进换流器的性能,使其对各种扰动和不确定因素具有鲁棒性,从而提高级联系统的抗扰动能力,但控制器中参数较多并且优化难度较大。文献[14]在DC-DC换流器下垂控制中附加输出电压前馈通道,改善了系统的暂态特性,但前馈通道的输出直接作用于占空比,控制不当容易导致系统振荡失稳。
为了解决上述问题,文献[15-16]考虑系统的非线性特征,基于吸引域理论提出了实用有效的稳定性改善方法,但这些文献均针对传统直流微电网。近年来,为了应对低惯量、低阻尼和缺乏灵活调节资源等问题,研究人员提出了类虚拟同步发电机(Analogous Virtual Synchronous Generator, AVSG)等控制方法,并开发了柔性负荷等需求侧资源[17-19]。AVSG可为直流微电网提供惯量支撑和阻尼支撑,从而提高系统的稳定性。至于柔性负荷,虽然因负阻抗特性会给系统的稳定性带来不利影响,但可通过限制其调节步长降低系统失稳的可能性。基于吸引域理论,充分利用AVSG和柔性负荷等新型控制单元的调控能力,将有效改善系统的稳定性。
然而,相关研究很少并且在上述两方面均存在继续深入的空间。文献[20]基于混合势函数法(Mixed Potential Function, MPF)和拉萨尔不变性定理估算了含虚拟直流电机直流微电网的吸引域,但与基于TS模糊模型的方法相比,该方法具有较强的保守性[21]。更为重要的是,文中未基于吸引域进一步分析虚拟惯量和阻尼等控制参数对系统大信号稳定性的影响,因而无法为直流微电网大扰动下的稳定运行提供有效的指导。文献[22]则针对控制参数无法修改的情况,利用负荷功率能柔性调节的特性调整系统工作点的运行轨迹,避免了负荷一次性投入引起的振荡失稳问题。运行轨迹的调整是基于恒功率负荷对系统大信号稳定性影响的分析,能得到定量的结论,从而弥补定性分析的不足,但采取的二分法可能增加中间工作点的数量,从而增加负荷功率的调节时长。
针对上述问题,本文提出一种考虑AVSG控制参数和柔性负荷灵活调节的稳定控制方法。首先,给出直流微电网的拓扑结构,并将AVSG等新型控制方法引入系统;其次,基于TS模糊模型估算直流微电网的吸引域;然后,通过改进AVSG的控制参数扩大吸引域,或者通过边界法调整系统工作点运行轨迹,使目标稳态点的吸引域直接或者间接包含初始稳态点,从而保障系统的稳定运行;最后,通过硬件在环仿真(Hardware in the Loop, HIL)验证所提方法的有效性。
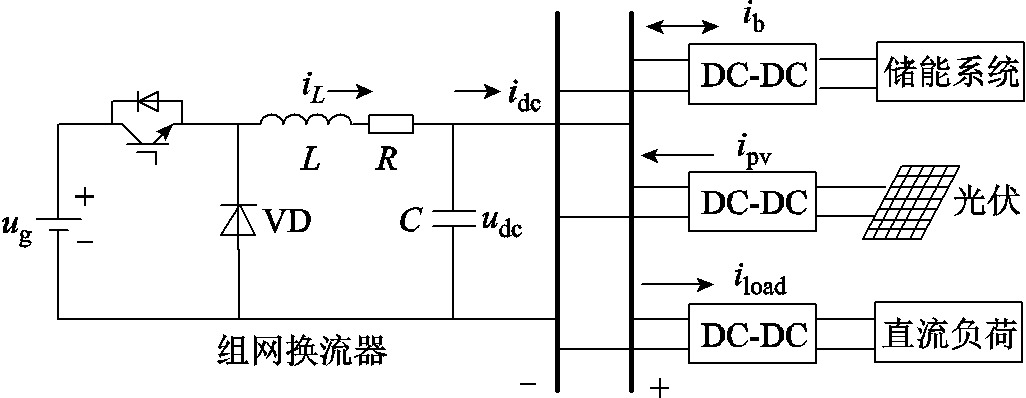
本文所研究的直流微电网结构如图1所示,该微电网主要由上级直流电网供电,而不用向上级电网反送电能,适用于直流负载比较集中的区域,如电动汽车充电站、居民住宅楼等场所。关于电路,组网换流器(Networking Converter, NC)选用Buck电路以减弱系统的非线性特征,从而简化分析过程。至于控制,NC采用AVSG控制[23],通过输出功率的增减为系统提供惯量和阻尼支撑,其电感电流、输出电压和输出电流分别为iL、udc和idc,AVSG控制原理于1.2节详述;储能系统采用下垂控制,与并网换流器协调控制母线电压,其输出电流为ib;光伏系统则采用最大功率追踪(Maximum Power Point Tracking, MPPT)策略,以充分利用太阳能,其输出电流为ipv;直流负荷考虑需求侧响应,实际包含随机负荷和柔性负荷两部分,在文中通过定电压控制和分批投切电阻的方式参与系统的运行,其总电流为iload。
图1 直流微电网的结构
Fig.1 Structure of the DC microgrid
系统的结构及控制如上所述,其主要参数见表1,在理论分析和实验验证部分均会使用。
表1 系统主要参数
Tab.1 System main parameters
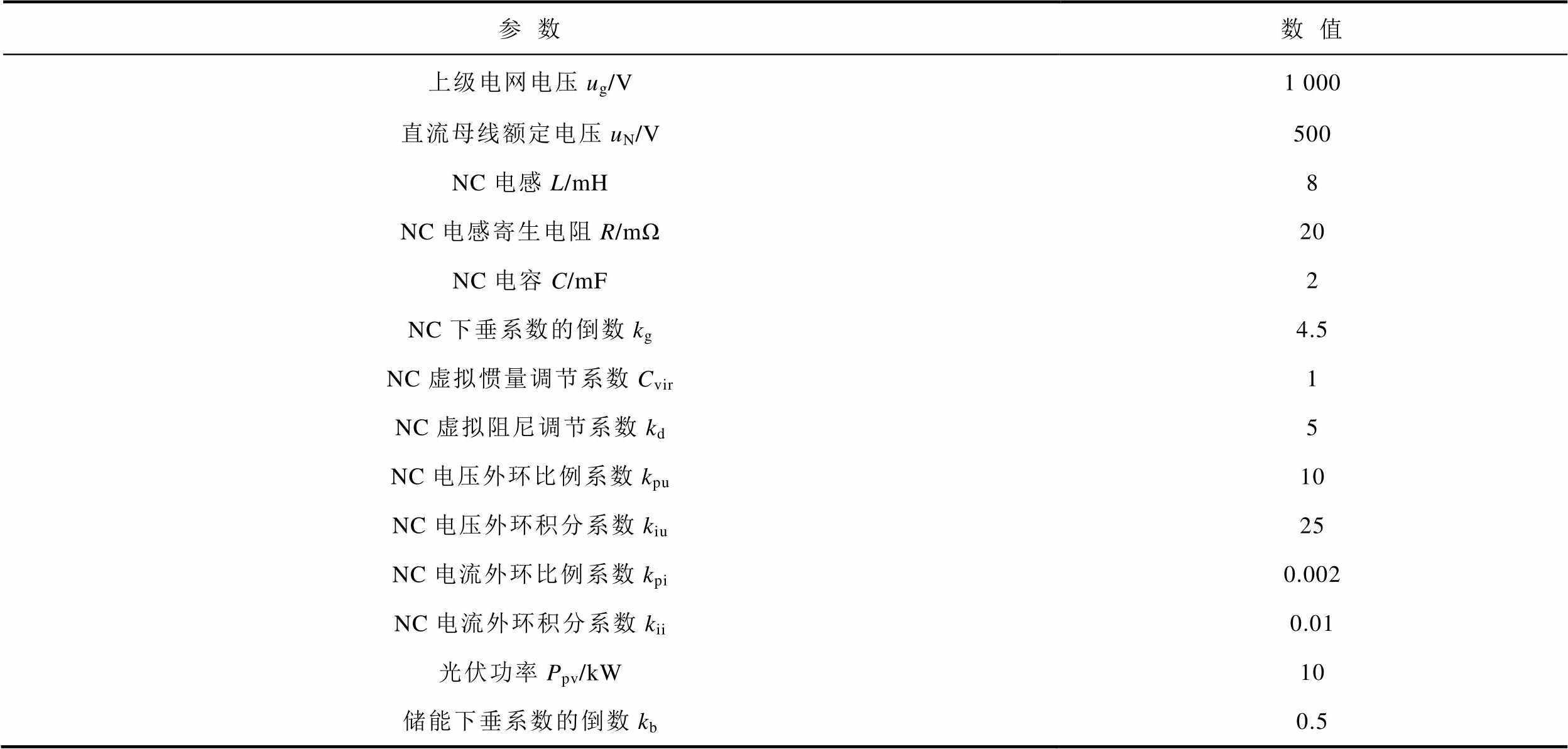
参数数值 上级电网电压ug/V1 000 直流母线额定电压uN/V500 NC电感L/mH8 NC电感寄生电阻R/mΩ20 NC电容C/mF2 NC下垂系数的倒数kg4.5 NC虚拟惯量调节系数Cvir1 NC虚拟阻尼调节系数kd5 NC电压外环比例系数kpu10 NC电压外环积分系数kiu25 NC电流外环比例系数kpi0.002 NC电流外环积分系数kii0.01 光伏功率Ppv/kW10 储能下垂系数的倒数kb0.5
直流母线电压是衡量直流微电网电能质量的唯一标准。为了抑制母线电压波动,借鉴交流系统虚拟同步发电机思想的控制方法成为研究热点。其中,文献[23]提出的AVSG控制方法因物理意义明确和对电机参数依赖度低受到广泛关注,该方法稳态特性与下垂控制相同,但暂态过程中能够提供惯量和阻尼支撑,其基本原理为
 (1)
(1)
式中,Cvir为虚拟惯量调节系数,该值越大,AVSG惯性响应越强;kd为虚拟阻尼调节系数,该值越大,AVSG提供的阻尼电流kd( -udc)越大,其中为AVSG输出电压,输出至电压电流双环控制环节。
-udc)越大,其中为AVSG输出电压,输出至电压电流双环控制环节。
在参数的选取上,Cvir和kd并非越大越好。Cvir增加时,功率的动态响应会变慢并伴随着超调量的增加,达到一定程度系统会逐渐开始振荡。而对于kd,其对系统的影响趋势与Cvir明显不同,kd较小时,功率动态响应速度快,但超调量也比较大,如需达到稳定状态则需较长的时间,而当kd继续增大时,系统的阻尼不断增加,响应速度因此变慢。
根据AVSG控制的原理,设计图2a所示的NC控制框图。假设负荷突变idc迅速增加,由于惯量模拟环节的积分作用,逐渐减小至稳态。在此过程中,由于变化缓慢,系统对双环控制跟踪电压能力的要求不高,其良好的电压维持能力才是AVSG控制得以有效实现的关键。然而,双环控制一般难以抑制直流电压大的波动和冲击。严重情况下,直流母线电压变化率与电压最低点和施加AVSG控制之前几乎一致,虚拟惯性响应的强度很弱,NC将无法起到有效的惯量支撑作用。
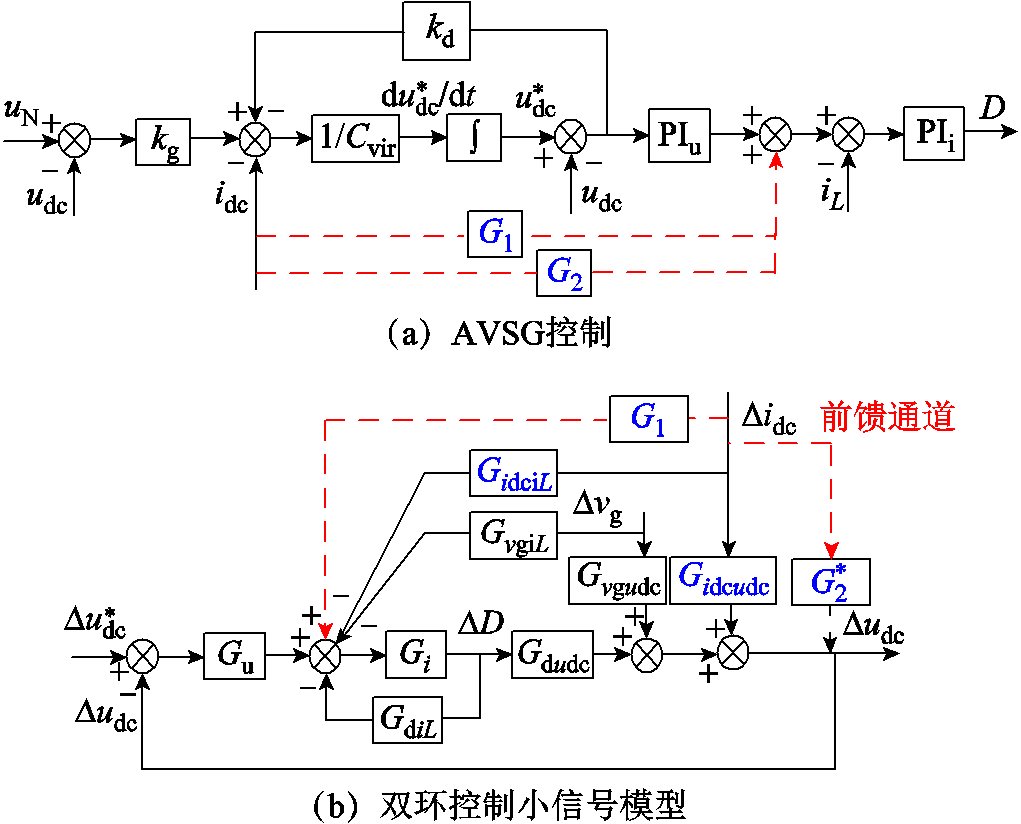
图2 NC控制框图
Fig.2 NC control block diagram
为解决上述问题,常用的方法是建立双环控制的小信号模型,并在其中附加输出电流前馈补偿通道,如图2b所示。图中,输出电流的变化量∆idc经过GidciL和Gidcudc对∆udc造成影响,令G1与GidciL相等、 与Gidcudc相反,理论上可以消除∆idc的影响,从而使输出电压维持不变。与此同时,为更好地实现控制,将的作用点前移,叠加至电压外环产生的参考电流上,此时通过控制结构等效变换可得到G2。因此,有
与Gidcudc相反,理论上可以消除∆idc的影响,从而使输出电压维持不变。与此同时,为更好地实现控制,将的作用点前移,叠加至电压外环产生的参考电流上,此时通过控制结构等效变换可得到G2。因此,有
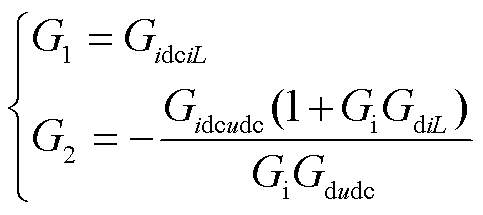 (2)
(2)
式中,GidciL为∆idc至∆iL的传递函数;Gidcudc为∆idc至∆udc的传递函数;Gi为电流内环传递函数;GdiL为占空比变化量∆D至∆iL的传递函数;Gdudc为∆D至∆udc的传递函数。
进一步地,将传递函数更为具体的表达式代入式(2)[24],得
 (3)
(3)
通过上述补偿可以使双环控制获得理想的动态性能,但式(3)在物理上往往无法准确实现,因为对于G2而言,其分子多项式的次数大于分母多项式的次数。在此情况下,为了使补偿通道相对简单并且易于物理实现,本文采用稳态补偿,有
 (4)
(4)
最后,含前馈补偿通道的AVSG控制单元作为一个整体,在直流微电网中起改善稳定性的作用。
吸引域是系统遭受扰动后,最终能渐近收敛到平衡点的所有初始状态的集合。若初始状态在吸引域内,系统是稳定的;否则不稳定。然而,真实的吸引域计算十分困难,一般采用MPF和TS模糊模型等方法进行估算。与MPF相比,基于TS模糊模型估算吸引域的方法因保守性较弱而受到广泛关注[21]。以下详述本文基于TS模糊模型估算吸引域的过程,包括直流微电网建模、TS模糊模型建立和吸引域绘制三个步骤。
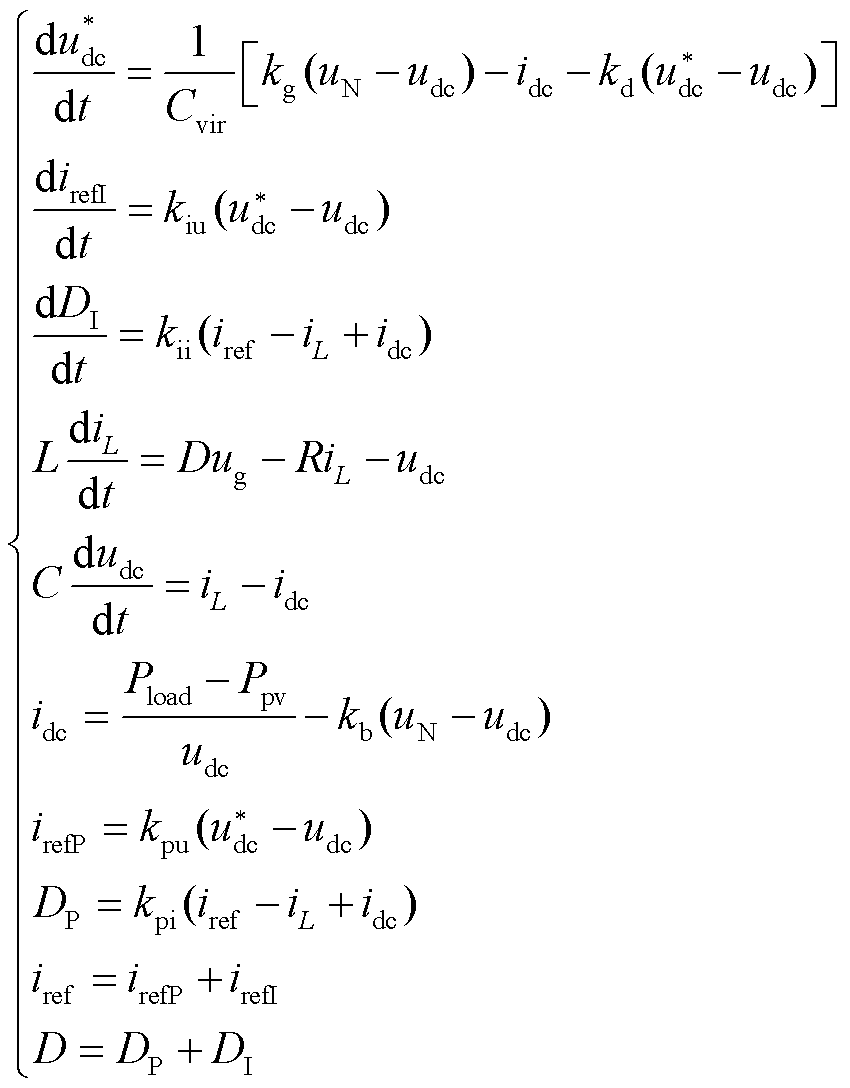
对于图1所示的直流微电网,本文重点关注NC的主电路及其控制系统,图2a中的PI控制环节及输出量在建模时均分为比例和积分两部分。另外,为了降低模型阶次并简化分析过程,对其他单元进行简化,将采用定功率控制的负荷和MPPT控制的光伏系统建模为恒功率单元,将储能系统建模为理想的下垂控制单元。此时,直流微电网的模型为
 (5)
(5)
式中,iref为NC的电流参考值;irefP和irefI分别为iref的比例和积分部分;D为NC的占空比;DP和DI分别为D的比例和积分部分;Pload、Ppv分别为负荷和光伏功率,认为两者在电压扰动过程中保持不变。
为不失一般性,以平衡状态( ,
, ,
, ,
, ,
, )作为新的原点对式(5)进行坐标变换,变换式为
)作为新的原点对式(5)进行坐标变换,变换式为 、
、 、
、 、
、 、
、 ,然后消去微分中的常数项和稳态下为0的部分,最后将其转换为式(6)所示的矩阵形式
,然后消去微分中的常数项和稳态下为0的部分,最后将其转换为式(6)所示的矩阵形式
 (6)
(6)
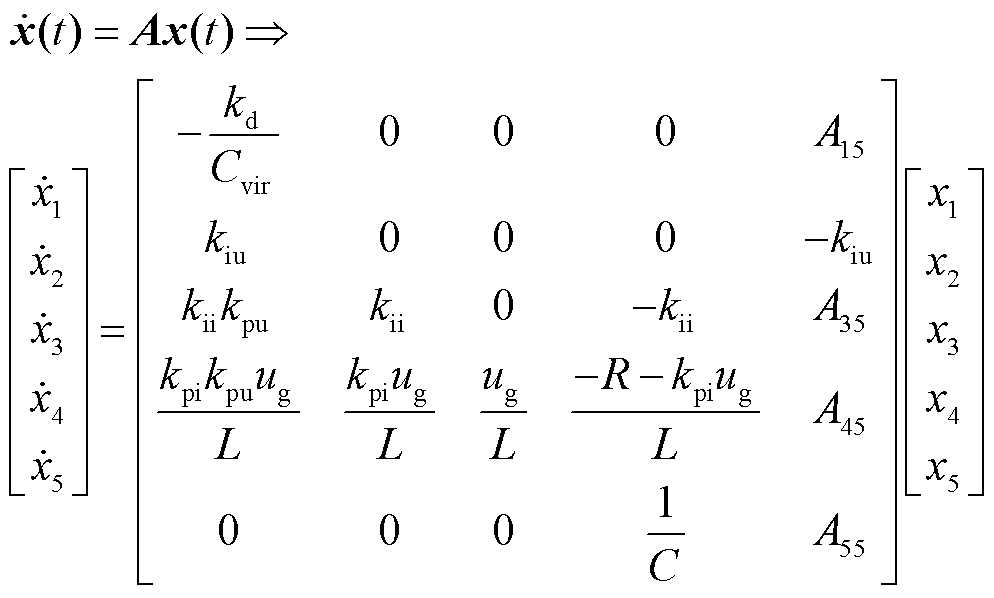
式中,A为系数矩阵,A15、A35、A45、A55为其中的元素,且有
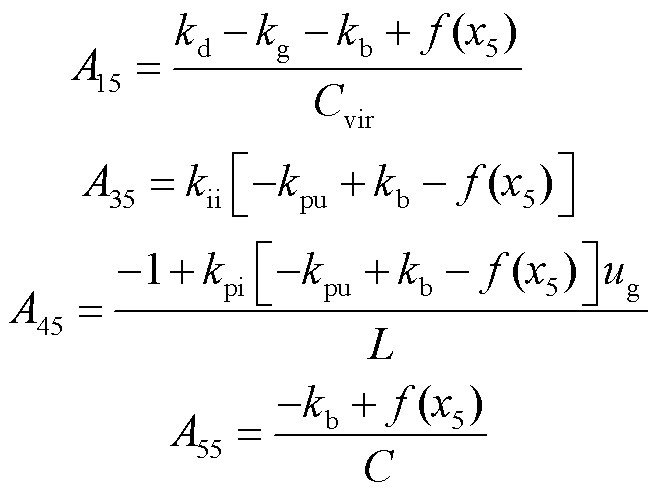
式中, ,为系统中的非线性项。
,为系统中的非线性项。
TS模糊模型由T. Takagi和M. Sugeno于1985年提出,其核心思想是用多个加权的局部线性模型逼近原非线性系统,当局部模型数量足够多时,系统的模糊模型与原非线性系统等效[25]。
式(6)中存在唯一的非线性项,采用以状态变量的最大值和最小值构建模糊空间的方法,将平衡点附近的区域Ω(边界记为∂Ω)划分成两个模糊子空间。在每个模糊子空间内对原系统进行线性化处理,可得到与之对应的局部模型S1和S2。
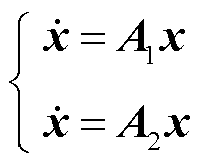 (7)
(7)
式中,A1、A2为系统矩阵,分别对应A中x5等于x5max和x5min的情况。
在此基础上,根据变量x5对x5max、x5min的隶属度计算局部模型的权重,即
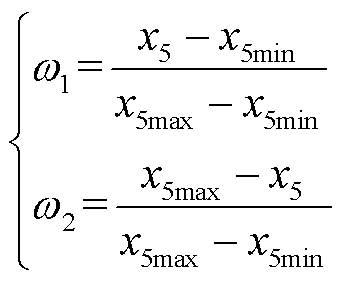 (8)
(8)
式中,ω1、ω2分别为S1和S2的权重函数。以x5=x5max为例,此时ω1、ω2分别等于1和0,系统可建模为S1,与期望的模型一致。
综上所述,由式(7)、式(8)可得到直流微电网的TS模糊模型为
 (9)
(9)
基于直流微电网的TS模糊模型,利用线性矩阵不等式(Linear Matrix Inequality, LMI)工具可以有效地构建具体的Lyapunov函数,从而通过数值计算方法估计并绘制平衡点的吸引域。
采用二次型Lyapunov函数 ,根据Lyapunov直接法,只要满足
,根据Lyapunov直接法,只要满足 ,则非线性系统是渐近稳定的。据此,将TS模糊模型代入,得到系统渐近稳定的条件为LMI(见式(10)),直流微电网的稳定性问题即转换为LMI是否可行的问题。
,则非线性系统是渐近稳定的。据此,将TS模糊模型代入,得到系统渐近稳定的条件为LMI(见式(10)),直流微电网的稳定性问题即转换为LMI是否可行的问题。
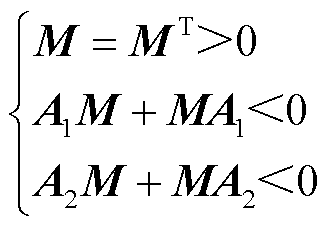 (10)
(10)
如果存在对称正定矩阵M使LMI成立,令Vmin=minV(∂Ω),则系统在Ωm={x∈RN|V(x)≤Vmin}内渐近稳定。当然,希望估算的吸引域尽可能地大,因此通过减小x5min、增大x5max的方式进一步增大Ω,同时更新Ωm,直至不存在M使LMI成立,此时的Ωm即为系统的最大估计吸引域(Largest Estimated Domain of Attraction, LEDA)[11, 21]。
已有研究表明,基于二次型函数估算的吸引域在二三阶系统中分别为椭圆形和椭球体,在本文五阶系统中则为无法直接呈现的凸多面体[15, 22]。实际上,系统的稳定性虽然由控制环节动态性能和被控物理动态性能共同决定,但最终体现在物理动态上,系统电压电流抗扰能力的提升,在某种程度上也意味着控制状态量的抗扰能力增强,因此选取x4-x5平面作图。图3给出了Lyapunov函数的三维曲面,其值小于或等于Vmin的部分向x4-x5平面投影得到的椭圆,即为后续分析需要呈现的LEDA。
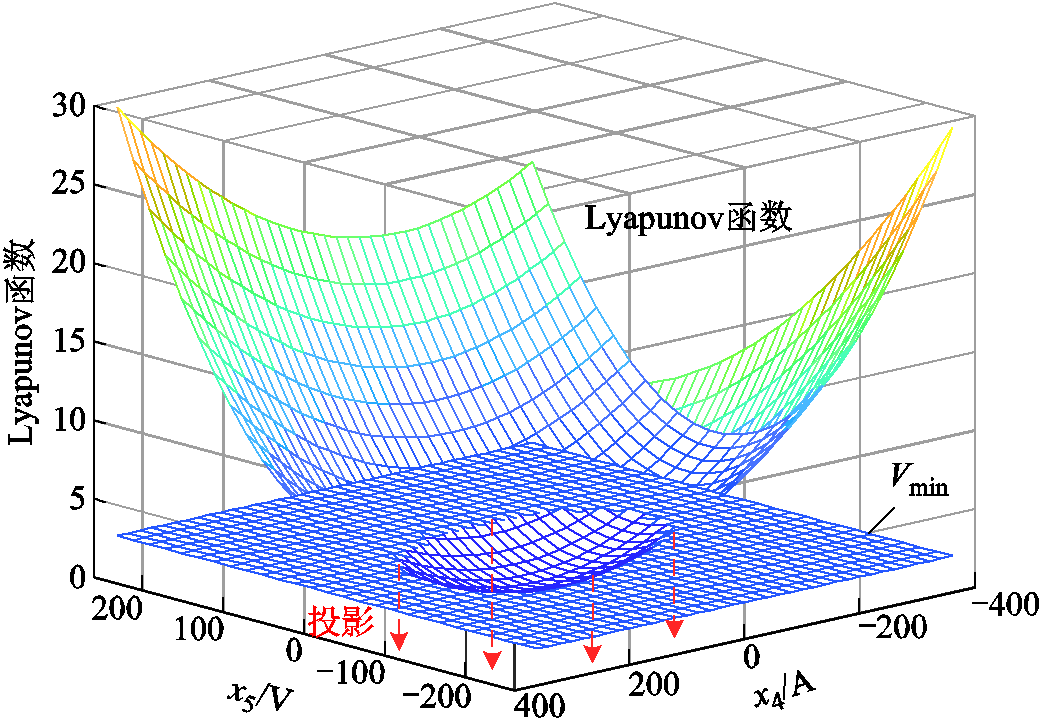
图3 Lyapunov函数(Pload=100 kW)
Fig.3 Lyapunov function(Pload=100 kW)
本文基于吸引域理论,提出一种考虑AVSG控制参数和柔性负荷灵活调节的直流微电网稳定控制方法,如图4所示。
图4a为控制体系框图,集中控制器通过光纤获取直流微电网状态信息,包括投切负荷的大小,若系统存在失稳风险,集中控制器下发控制参数或运行轨迹调整指令;否则不发挥作用,系统仍然基于本地信息实现控制目标。这种控制体系兼具集中控制和分散控制的优点。
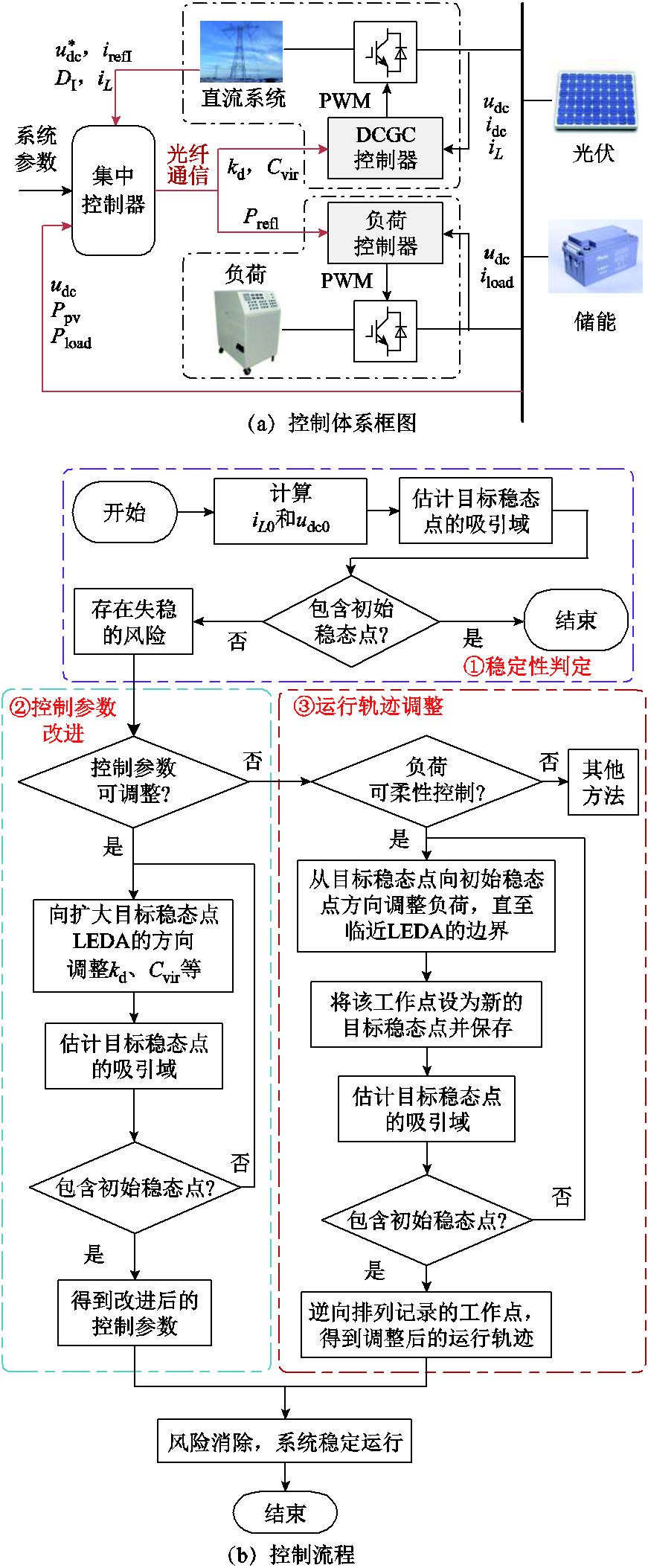
图4 考虑AVSG控制参数和柔性负荷灵活调节的直流微电网稳定控制方法
Fig.4 Stability control method of DC micro grid considering AVSG control parameters and flexible load flexible regulation
图4b为具体的控制流程。直流微电网中的负荷包含柔性负荷和随机负荷两部分。对于柔性负荷,其相当于系统内可灵活调节的辅助资源,投切的时刻及大小一般会告知集中控制器,甚至完全受集中控制器所控,目标稳态点已知,因此能够提前做出参数或轨迹的调整;对于随机负荷,可根据负荷的当前大小以及可能的最大变化量估计目标稳态点,然后得到使吸引域足够大的控制参数,这可能因参数选取的保守性而降低系统的动态性能,但能保障系统稳定运行。以下分稳定性判定、控制参数整定和运行轨迹调整三部分进行论述。
本文主要研究系统的大信号稳定性问题,涉及的平衡点均是小信号稳定的。在此前提下,计算目标稳态点Oobj的iL0和udc0并估算吸引域,若Oobj的LEDA包含初始稳态点Oini,系统是稳定的,否则存在失稳的风险。
由于平衡状态下系统的状态量不发生变化,故令式(5)中的微分项为0,得到NC的稳态电压电流为
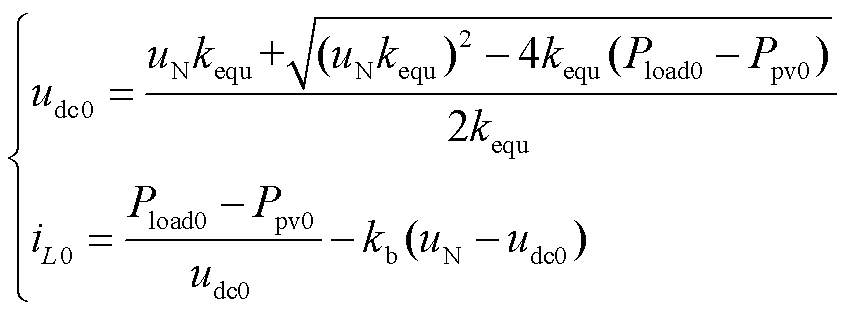 (11)
(11)
式中, 。
。
同时,按照第2节的方法估算Oobj的吸引域。LEDA是真实吸引域的子集,Oobj的LEDA不包含Oini,虽不能判定系统必然失稳,但可以确定系统存在失稳的风险。
直流微电网存在失稳风险,若系统的控制参数可调,则改进虚拟惯量和阻尼等参数扩大系统的吸引域,直至Oobj的LEDA包含Oini。此时,系统将以渐近的方式收敛于Oobj,失稳的风险得以有效规避。不同kd、Cvir下Oobj的估算吸引域如图5所示。以下以图5为例,分析kd、Cvir对系统吸引域的影响,并给出kd、Cvir的改进过程。
图5a为不同kd下目标稳态点Oobj1的LEDA,其中Oobj1、Oini1的负荷分别为180 kW和100 kW。可以看出,kd=5时,Oobj1的LEDA很小,不包含Oini1,系统的稳定性难以保证;随着kd的增大,系统抗扰动能力增强,LEDA逐渐变大;当kd增加至63.5时,LEDA包含Oini1(对于该结论,进一步比较了V(x)与Vmin的大小,以下相同),系统失稳的风险得以消除。
图5b为不同Cvir下目标稳态点Oobj2的LEDA,其中Oobj2、Oini2的负荷分别为180 kW和115 kW。可以看出,与图5a类似,随着Cvir的增大,LEDA逐渐增大,当Cvir增加至0.05时,Oobj2的LEDA包含Oini2,系统的稳定性得以保障;但与图5a不同的是,随着Cvir的继续增加,Oobj2的LEDA呈现出逐渐减小的趋势。其原因在于,随着Cvir的增加,AVSG的虚拟惯性响应增强,在负荷变化的过程中,能弥补一定的功率差额,系统的抗扰动能力增强[26],但Cvir继续增加,积分环节的迟滞作用凸显,将导致电压的超调量变大,甚至开始振荡[27]。这与文献[17, 23]小信号分析得到的结论一致,在一定范围内增加Cvir能改善系统的稳定性,但Cvir过大,会使至少一个特征根逐渐向右平面移动,系统的稳定性减弱。
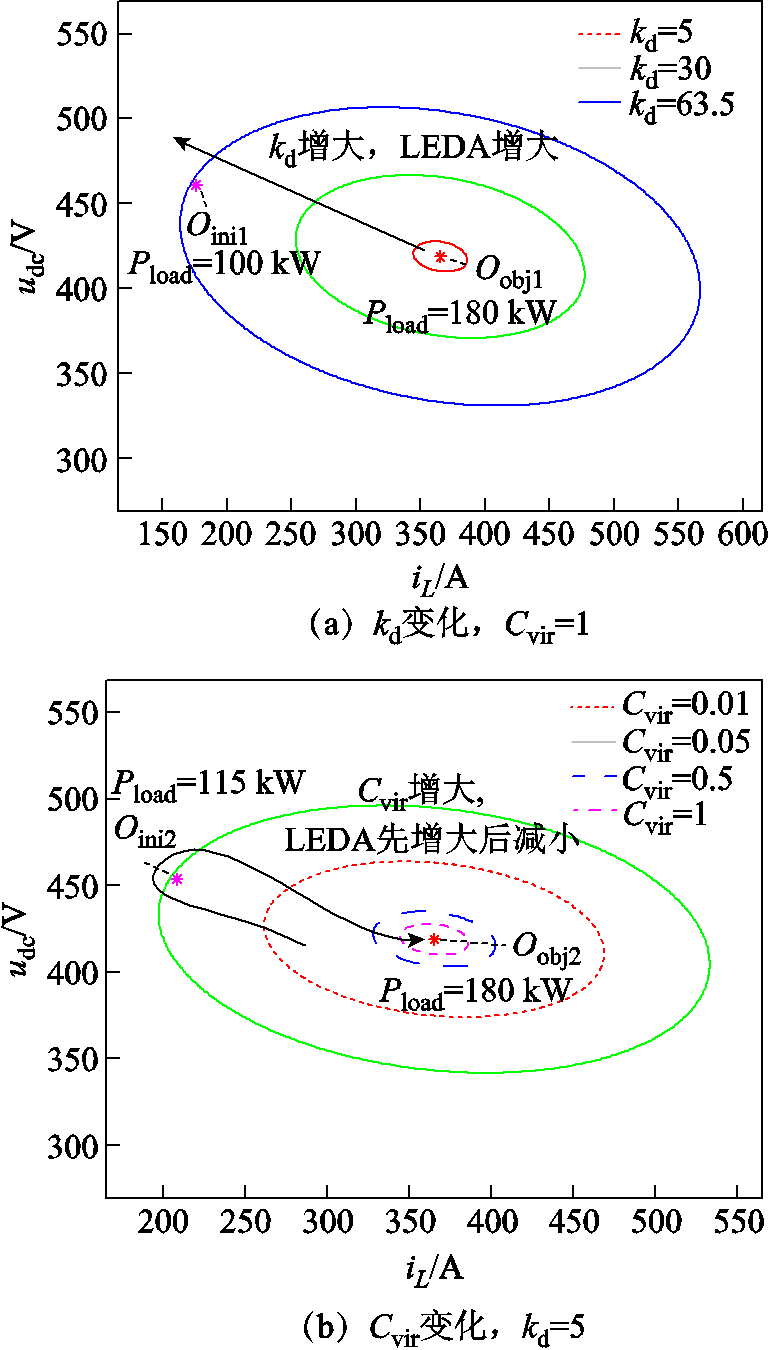
图5 不同kd、Cvir下Oobj的估算吸引域
Fig.5 LEDA of Oobj under different kd and Cvir
实际应用中,由于kd的调整相对简单并且主要用于稳定控制,因此建议优先调整该系数;至于虚拟惯量,可在Cvir所处的单调区间内进行调节,例如算例中的0.05~1,但由于Cvir当前值为1,取值偏大,因此可通过减小Cvir的方式增大系统的吸引域。
若系统的控制参数无法调整,则通过柔性负荷调整系统工作点的运行轨迹,在满足负荷最终需求的前提下,让后一个稳态点的LEDA依次包含前一个稳态点,从而保证系统的稳定运行。运行轨迹的调整过程如图6所示。
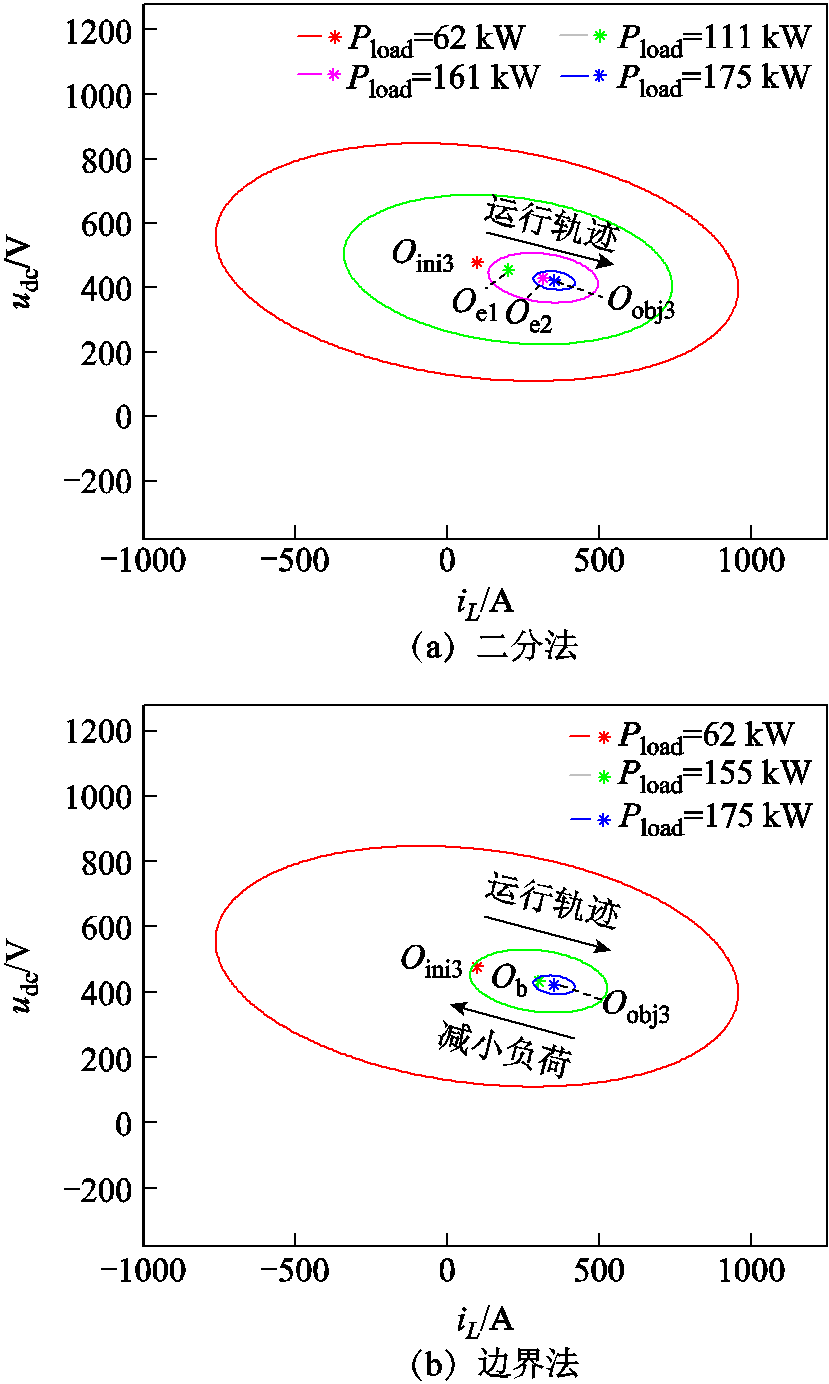
图6 运行轨迹的调整过程
Fig.6 Adjusting process of operation trajectory
图6a为二分法的调整过程,其中Oobj3、Oini3的负荷分别为175 kW和62 kW。在由Oini3向Oobj3切换的过程中,计算得到中间运行点Oe2、Oe1及其负荷功率分别为161 kW和111 kW。由于Oe2并未达到Oobj3的LEDA边界,以至于Oe2的LEDA不能直接包含Oini3,而是需要通过Oe1过渡,因此最终调整轨迹为Oini3→Oe1→Oe2→Oobj3。
与二分法相比,本文所提边界法能减少中间运行点的数量,如图6b所示。Oobj3负荷功率为175 kW,此时LEDA比较小,不包含Oini3,系统存在失稳的风险。在此情况下,减小负荷直至LEDA的边界,可得中间运行点Ob(负荷为155 kW)。令Ob为新的目标稳态点,其LEDA恰好包含Oini3,系统的稳定性得以保障。因此,调整后的运行轨迹为Oini3→Ob→Oobj3,比二分法少一个中间运行点。
恒功率负荷对系统稳定性影响的结论已被广泛接受和认可,即恒功率负荷具有负阻抗特性,负荷越大,进而系统阻尼越小,系统稳定性越低。但运行轨迹调整的意义在于,定量地计算柔性负荷投切的次数和大小,以确保系统的稳定性及负荷调整的快速性,而这是利用定性结论难以解决的。
需要说明的是,所提控制方法主要适用于吸引域估算具有一定保守性的场景。直流微电网精确建模时,由于Lyapunov固有的保守性,吸引域估算会偏于保守[28-29]。若忽略系统拓扑结构、工作模式、负荷差异性或对其进行简化,则吸引域估算可能激进,也可能保守。对于前者,应考虑估算误差的影响,在控制参数改进和运行轨迹调整中留有一定的裕度,从而保证系统稳定运行;对于后者,保守性的存在会使参数的调节幅度变大或中间运行点变多,但不会影响系统的稳定性。
为了验证所提方法的有效性,搭建如图7所示的HIL仿真系统[30]。该系统主要由RT-Lab实时仿真机、数字信号处理器(Digital Signal Processor, DSP)和上位机构成。控制算法部署在DSP,图1所示的直流微电网实时仿真模型通过上位机下载至RT-Lab。DSP与RT-Lab之间直接通过模拟端口进行数据交互,未考虑光纤通信μs级的延迟。电压、电流等则通过RT-Lab前面板的min-BNC接口进行测量。
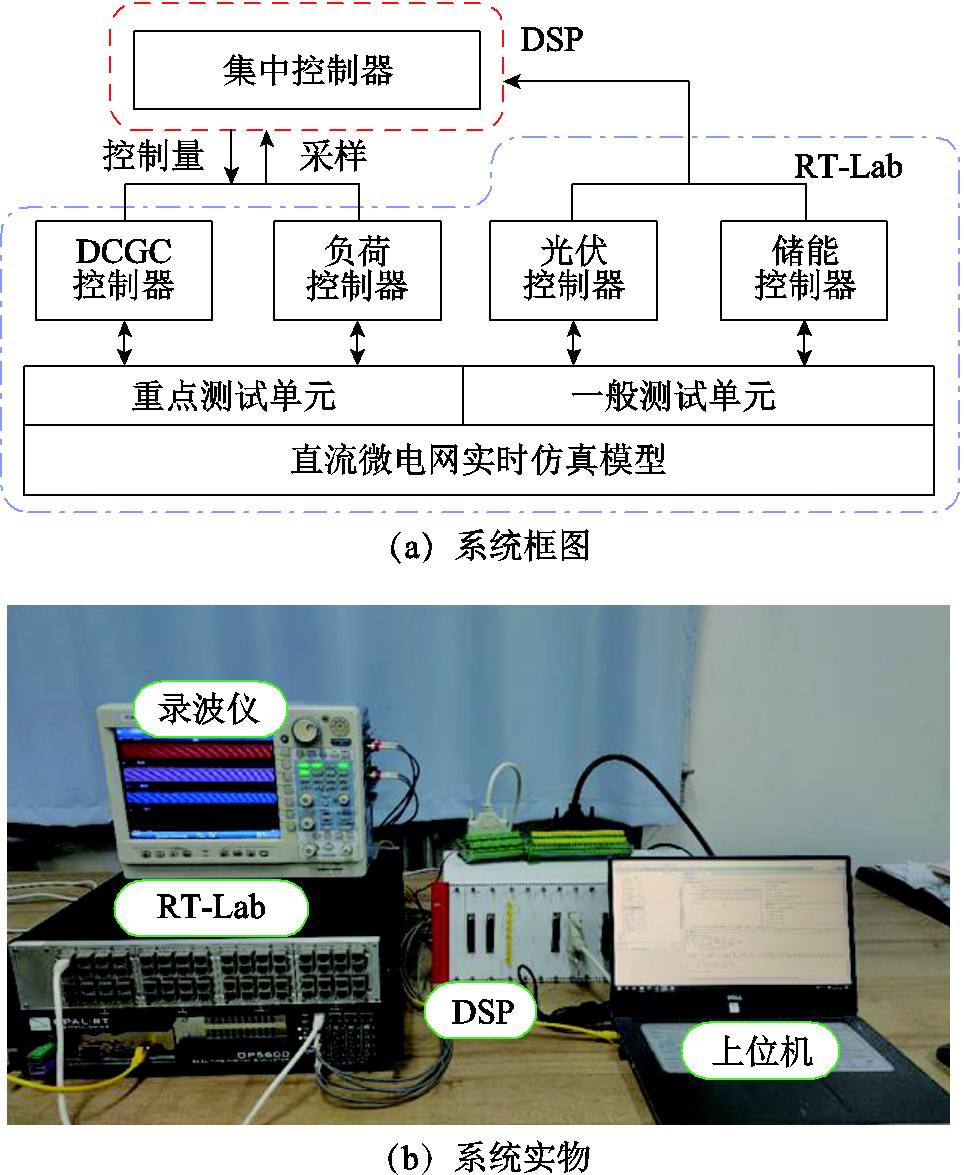
图7 硬件在环仿真系统
Fig.7 HIL simulation system
需要说明的是,为了更好地观察电压电流的变化趋势,实时仿真模型中NC未施加电流限幅环节,仅将占空比限制在0~0.95之间。另外,由于储能系统kb较小并且负荷较大,仿真过程中直流母线稳态电压偏低,但依然符合GB/T 35727—2017《中低压直流配电电压导则》的要求,即1 500 V以下等级允许电压偏差范围为标称电压的-20%~5%。
与3.2节的理论分析一致,Oobj1和Oobj2的负荷为180 kW,Oini1、Oini2的负荷分别为100 kW和 115 kW。基于LEDA改进虚拟惯量和阻尼等参数,能消除系统振荡失稳的风险,以下通过HIL实验对此进行验证。控制参数改进前后实验结果对比如图8所示。
图8a为kd改进前后的实验结果。5.0 s时负荷由100 kW阶跃至180 kW。kd=5时,Oobj1的LEDA很小,系统抗扰动能力不足,电压电流于负荷阶跃瞬间开始发散振荡,但由于占空比的限幅作用,振荡未持续发散,而是经过0.6 s后转变为有界的振荡状态;kd=63.5时,Oobj1的LEDA包含Oini1,系统抑制振荡的能力较强,经过0.2 s的振荡以及之后的过渡过程,于6.4 s进入了新的稳态。由此可知,根据分析结论对kd进行改进,可确保系统稳定运行。
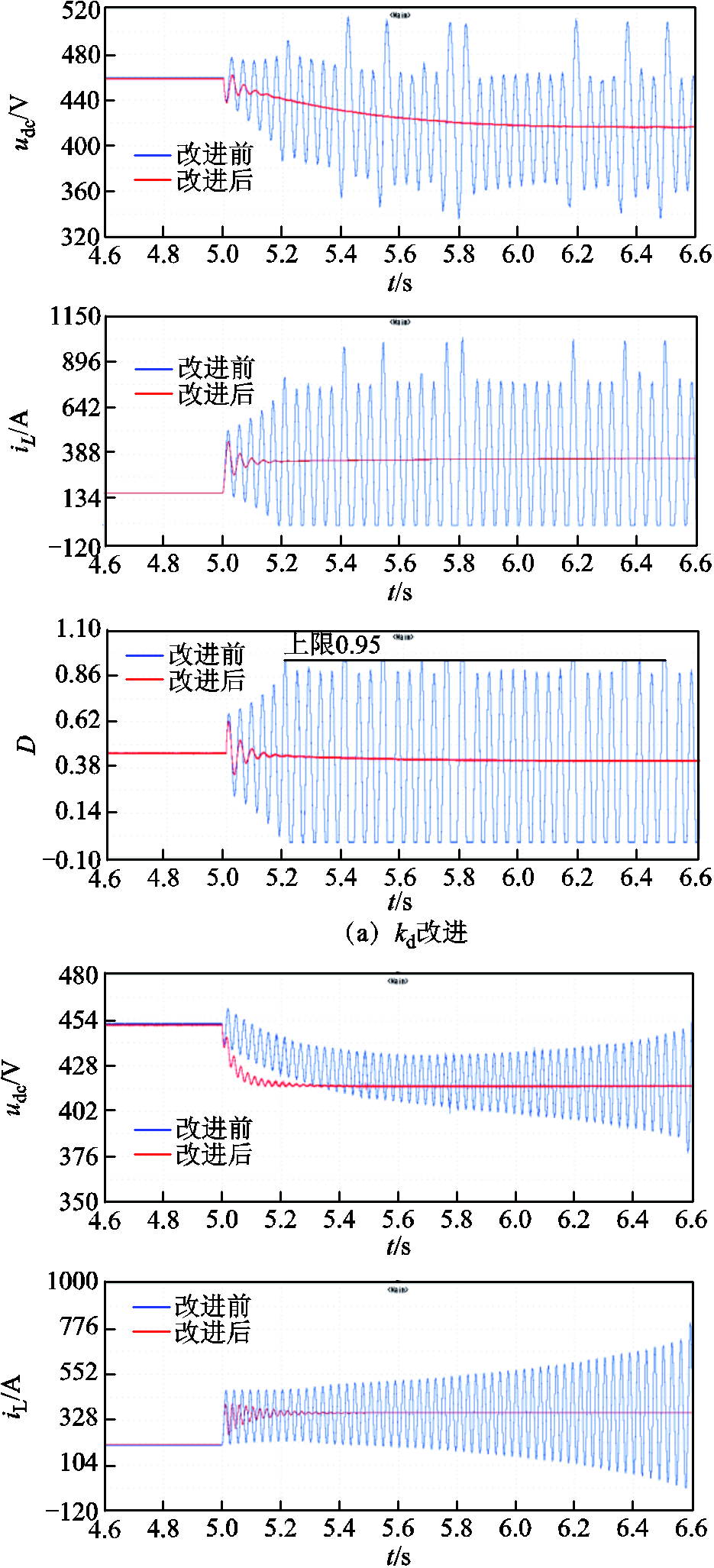
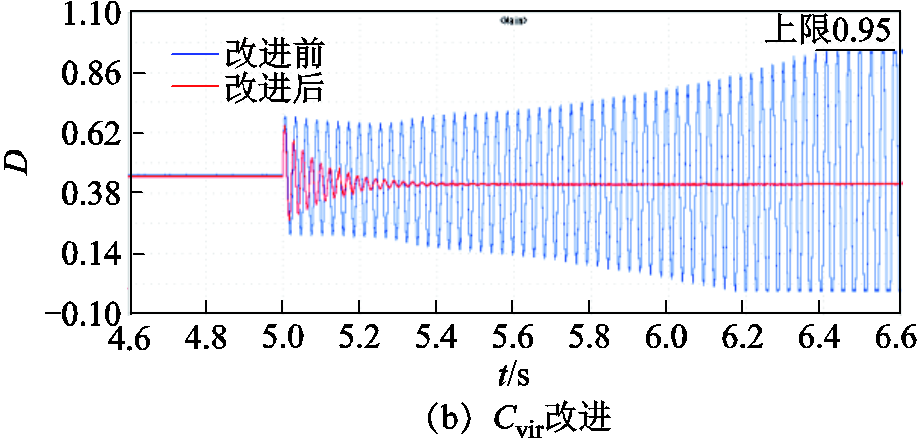
图8 控制参数改进前后实验结果对比
Fig.8 Comparison of experimental results before and after improvement of control parameters
图8b为Cvir改进前后的实验结果。5.0 s时负荷由115 kW阶跃至180 kW。Cvir=1时,Oobj2的LEDA很小,电压跌落后快速回升,超调量较大,使得系统发散振荡,经过1.6 s进入与图8a类似的有界振荡状态;Cvir=0.05时,Oobj2的LEDA包含Oini2,系统未振荡发散,而是逐渐收敛至稳定状态。由此可知,向增大LEDA的方向调节Cvir,直至包含初始稳态点,可消除系统振荡失稳的风险。
与3.3节的理论分析一致,Oobj3、Oini3的负荷分别为175 kW和62 kW。通过设置中间工作点调整系统的运行轨迹,可消除振荡失稳的风险,并且与二分法相比,边界法可减少中间运行点的数量。以下通过HIL实验验证边界法的有效性和优越性。运行轨迹调整结果对比如图9所示。
图9a为运行轨迹调整前的实验结果。负荷由62 kW阶跃至175 kW时,Oobj3的LEDA很小,系统的稳定性难以保证,发生了振荡。图9b为调整后的实验结果,包含边界法和二分法的运行曲线。可以看出,两种方法均能有效地消除系统振荡失稳的风险,但与二分法相比,边界法得到的中间运行点数量更少,在调节间隔均为3 s的情况下,能在 9.5 s时进入新的稳态。
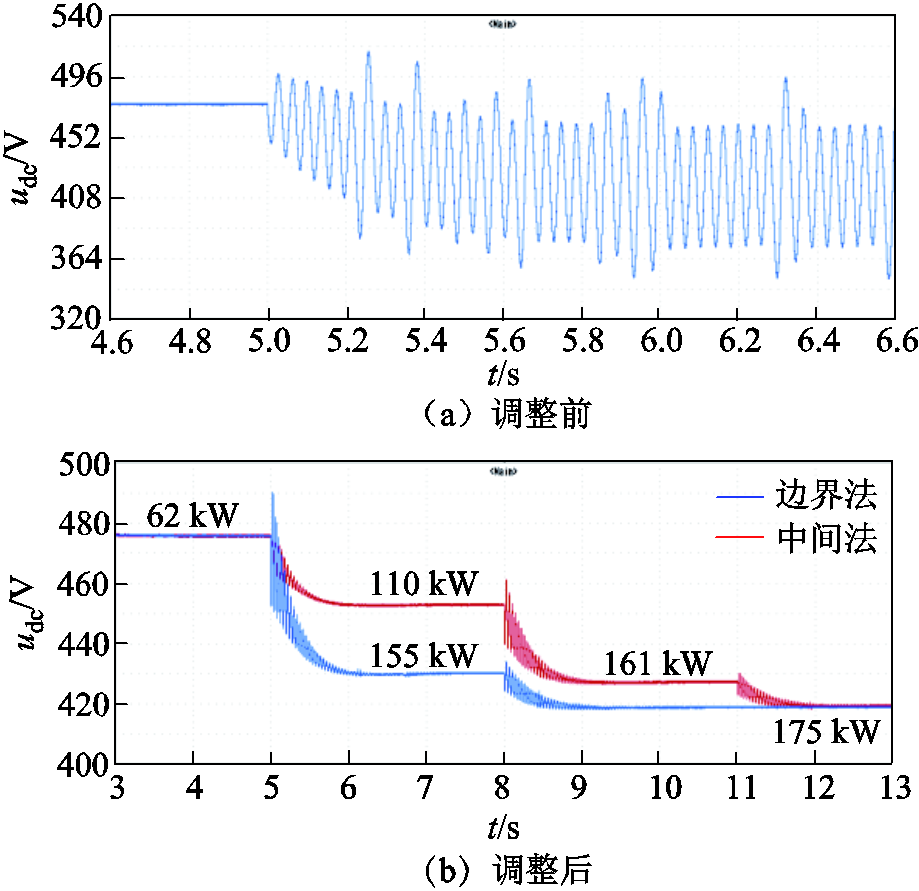
图9 运行轨迹调整结果对比
Fig.9 Comparison of adjustment results for operation trajectories
受吸引域估算方法和系统建模精度的影响,LEDA与真实吸引域存在一定的误差,有必要判断吸引域估算的保守性与激进性,从而在实际控制中予以考虑。
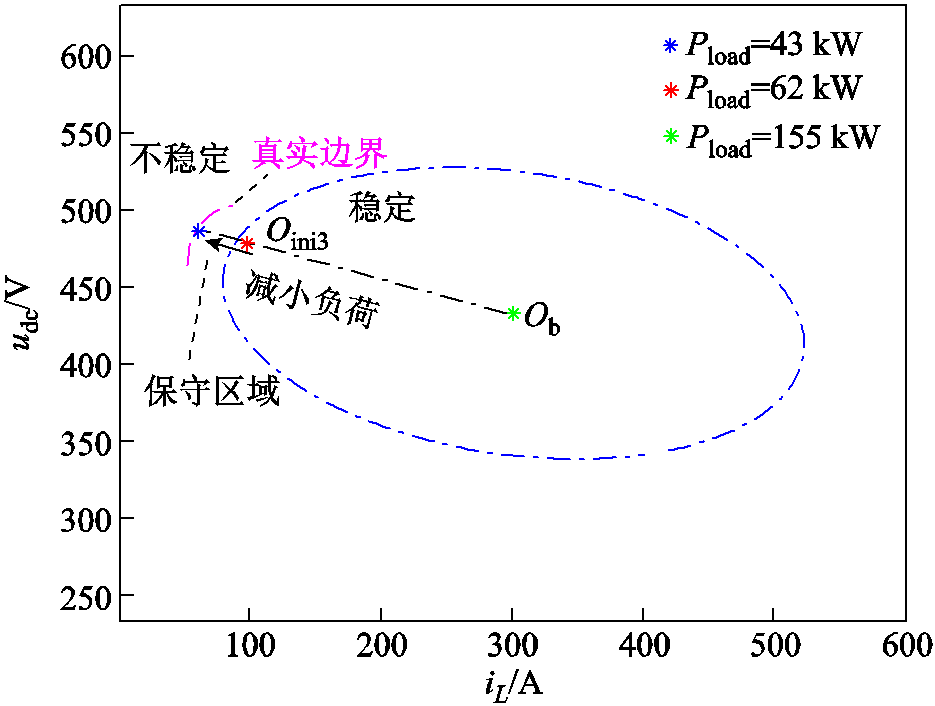
图10 LEDA误差测试过程
Fig.10 LEDA error testing process
以图6b中Ob为例,其LEDA误差测试过程如图10所示。初始稳态点Oini3的负荷为62 kW且处于LEDA的边界,因此从62 kW开始,不断减小初始稳态点的负荷功率并测试切换至Ob的稳定性。当初始稳态点的负荷功率小于43 kW时,系统失去稳定,说明该值为实际的稳定边界。该算例中吸引域估算具有一定保守性,所提方法适用于该场景。
针对直流微电网在稳态点之间切换出现的振荡失稳问题,本文提出一种基于吸引域估计考虑AVSG控制参数和柔性负荷灵活调节的稳定控制方法。通过理论分析和实验验证,得出如下结论:
1)所提方法简单实用,可以有效地保障直流微电网的稳定运行。通过改进虚拟阻尼和虚拟惯量等参数扩大吸引域,或者通过边界法调整系统工作点运行轨迹,使目标稳态点的LEDA直接或者间接包含初始稳态点,能保障系统稳定运行。
2)与二分法相比,边界法具有一定的优越性。在运行轨迹调整过程中,让后一个稳态点的LEDA恰好包含前一个稳态点,可减少中间工作点的数量,从而缩短整个切换过程。
3)基于TS模糊模型估算吸引域,并以图形的方式展示稳定性分析结果,可用于指导AVSG的参数整定。
本文基于吸引域理论改善了直流微电网的大信号稳定性,但LEDA存在一定的误差,如何有效建模并降低吸引域估算的误差有待继续探索;另外,故障也属于大扰动,如何确保直流微电网在故障工况下稳定运行也待继续研究。
参考文献
[1] 姜淞瀚, 彭克, 徐丙垠, 等. 直流配电系统示范工程现状与展望[J]. 电力自动化设备, 2021, 41(5): 219-231.
Jiang Songhan, Peng Ke, Xu Bingyin, et al. Current situation and prospect of demonstration projects of DC distribution system[J]. Electric Power Automation Equipment, 2021, 41(5): 219-231.
[2] 张泽华, 宋桂英, 张晓璐, 等. 考虑恒功率负载的直流微电网稳定性与鲁棒性控制策略[J]. 电工技术学报, 2023, 38(16): 4391-4405.
Zhang Zehua, Song Guiying, Zhang Xiaolu, et al. Stability and robustness control strategy of DC microgrid considering constant power load[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4391-4405.
[3] 张昊, 李昱, 尹亚飞, 等. 直流微电网集成式高品质协同控制策略[J]. 电工技术学报, 2023, 38(23): 6345-6358.
Zhang Hao, Li Yu, Yin Yafei, et al. An integrated high-quality cooperative control strategy of DC microgrids[J]. Transactions of China Electrotechnical Society, 2023, 38(23): 6345-6358.
[4] 陈庆, 袁栋, 袁宇波, 等. 多电压等级直流配电系统小信号稳定性评估方法[J]. 电力系统自动化, 2022, 46(21): 80-88.
Chen Qing, Yuan Dong, Yuan Yubo, et al. Small-signal stability assessment method for DC distribution system with multiple voltage levels[J]. Automation of Electric Power Systems, 2022, 46(21): 80-88.
[5] 王晴, 刘增, 韩鹏程, 等. 基于变流器输出阻抗的直流微电网下垂并联系统振荡机理与稳定边界分析[J]. 电工技术学报, 2023, 38(8): 2148-2161.
Wang Qing, Liu Zeng, Han Pengcheng, et al. Analysis of oscillation mechanism and stability boundary of droop-controlled parallel converters based on output impedances of individual converters in DC microgrids[J]. Transactions of China Electrotechnical Society, 2023, 38(8): 2148-2161.
[6] 彭克, 陈佳佳, 徐丙垠, 等. 柔性直流配电系统稳定性及其控制关键问题[J]. 电力系统自动化, 2019, 43(23): 90-98, 115.
Peng Ke, Chen Jiajia, Xu Bingyin, et al. Key issues of stability and control in flexible DC distribution system[J]. Automation of Electric Power Systems, 2019, 43(23): 90-98, 115.
[7] 王力, 谭振杰, 曾祥君, 等. 基于改进等效电路模型的直流微电网大信号稳定性分析[J]. 电工技术学报, 2024, 39(5): 1284-1299.
Wang Li, Tan Zhenjie,Zeng Xiangjun, et al. Large-signal stability analysis for DC microgrids based onthe improved equivalent circuit model[J]. Transactions of China Electrotechnical Society, 2024, 39(5): 1284-1299.
[8] Liu Zhangjie, Ge Xin, Su Mei, et al. Complete large-signal stability analysis of DC distribution network via brayton-moser’s mixed potential theory[J]. IEEE Transactions on Smart Grid, 2023, 14(2): 866-877.
[9] Chang Fangyuan, Cui Xiaofan, Wang Mengqi, et al. Region of attraction estimation for DC microgrids with constant power loads using potential theory[J]. IEEE Transactions on Smart Grid, 2021, 12(5): 3793-3808.
[10] 张泽华, 宋桂英, 张晓璐, 等. 考虑恒功率负载的直流微电网稳定性与鲁棒性控制策略[J]. 电工技术学报, 2023, 38(16): 4391-4405.
Zhang Zehua, Song Guiying, Zhang Xiaolu, et al. Stability and robustness control strategy of DC microgrid considering constant power load[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4391-4405.
[11] Kim H J, Kang S W, Seo G S, et al. Large-signal stability analysis of DC power system with shunt active damper[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6270-6280.
[12] 张晓兵. PWM整流器级联系统大信号稳定性分析及改善方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
Zhang Xiaobing. Research on large signal stability analysis and improvement method of PWM rectifier cascade system[D]. Harbin: Harbin Institute of Technology, 2018.
[13] Ahmad S, Ali A. Active disturbance rejection control of DC-DC boost converter: a review with modifications for improved performance[J]. IET Power Electronics, 2019, 12(8): 2095-2107.
[14] Gui Yonghao, Han Renke, M Guerrero J, et al. Large-signal stability improvement of DC-DC converters in DC microgrid[J]. IEEE Transactions on Energy Conversion, 2021, 36(3): 2534-2544.
[15] 聂金铜, 赵争鸣, 袁立强, 等. 级联恒功率负载情况下三相并网PWM整流器基于TS模糊模型的稳定性分析[J]. 电网技术, 2020, 44(5): 1931-1943.
Nie Jintong, Zhao Zhengming, Yuan Liqiang, et al. Stability of three-phase grid-connected PWM rectifier cascaded with constant power loads based on TS fuzzy models[J]. Power System Technology, 2020, 44(5): 1931-1943.
[16] 赵学深, 朱琳, 郭力, 等. 基于等值单机非线性模型的多换流器并联直流系统暂态稳定性分析及控制参数整定方法[J]. 中国电机工程学报, 2023, 43(4): 1389-1401.
Zhao Xueshen, Zhu Lin, Guo Li, et al. Transient stability analysis and control parameters tuning method of multi-converters DC power system based on equivalent single-converter nonlinear model[J]. Proceedings of the CSEE, 2023, 43(4): 1389-1401.
[17] Zhu Xiaorong, Meng Fanqi, Xie Zhiyun, et al. An inertia and damping control method of DC-DC converter in DC microgrids[J]. IEEE Transactions on Energy Conversion, 2020, 35(2): 799-807.
[18] 孙东阳, 李爽, 王俊武, 等. 基于虚拟直流电机控制的船舶高频高峰值脉冲负载冲击平抑控制策略研究[J]. 电工技术学报, 2024, 39(20): 6328-6344.
Sun Dongyang, Li Shuang, Wang Junwu, et al. Study on virtual DC generator-based ship high-frequency and high-peakpower pulsed loads impact damping control strategy[J]. Transactions of China Electrotechnical Society, 2024, 39(20): 6328-6344.
[19] 孔祥玉, 马玉莹, 艾芊, 等. 新型电力系统多元用户的用电特征建模与用电负荷预测综述[J]. 电力系统自动化, 2023, 47(13): 2-17.
Kong Xiangyu, Ma Yuying, Ai Qian, et al. Review on electricity consumption characteristic modeling and load forecasting for diverse users in new power system[J]. Automation of Electric Power Systems, 2023, 47(13): 2-17.
[20] 尹英龙. 基于虚拟直流电机的DC/DC变换器稳定控制技术研究[D]. 西安: 陕西科技大学, 2021.
Yin Yinglong. Research on stability control technology of DC/DC converter based on virtual DC machine[D]. Xi’an: Shaanxi University of Science & Technology, 2021.
[21] 李鹏飞, 李霞林, 王成山, 等. 中低压柔性直流配电系统稳定性分析模型与机理研究综述[J]. 电力自动化设备, 2021, 41(5): 3-21.
Li Pengfei, Li Xialin, Wang Chengshan, et al. Review of stability analysis model and mechanism research of medium- and low-voltage flexible DC distribution system[J]. Electric Power Automation Equipment, 2021, 41(5): 3-21.
[22] 郑华俊. 向无源网络供电的柔性直流输电系统大信号稳定性研究[D]. 重庆: 重庆大学, 2020.
Zheng Huajun. Study on large signal stability of VSC-HVDC system supplying passive networks[D]. Chongqing: Chongqing University, 2020.
[23] 朱晓荣, 孟凡奇, 谢志云. 基于虚拟同步发电机的直流微网DC-DC变换器控制策略[J]. 电力系统自动化, 2019, 43(21): 132-140.
Zhu Xiaorong, Meng Fanqi, Xie Zhiyun. Control strategy of DC-DC converter in DC microgrid based on virtual synchronous generator[J]. Automation of Electric Power Systems, 2019, 43(21): 132-140.
[24] 支娜. 直流微电网协调控制及其稳定性研究[D]. 西安: 西安理工大学, 2016.
Zhi Na. Research on coordinated control and stability analysis of DC microgrid[D]. Xi’an: Xi’an University of Technology, 2016.
[25] Zheng Huajun, Yuan Xufeng, Cai Jie, et al. Large-signal stability analysis of DC side of VSC-HVDC system based on estimation of domain of attraction[J]. IEEE Transactions on Power Systems, 2022, 37(5): 3630-3641.
[26] 李翼翔, 田震, 唐英杰, 等. 考虑构网型与跟网型逆变器交互的孤岛微电网小信号稳定性分析[J]. 电力自动化设备, 2022, 42(8): 11-18.
Li Yixiang, Tian Zhen, Tang Yingjie, et al. Small-signal stability analysis of island microgrid considering interaction between grid-forming converter and grid-following converter[J]. Electric Power Automation Equipment, 2022, 42(8): 11-18.
[27] 孟建辉, 王毅, 石新春, 等. 基于虚拟同步发电机的分布式逆变电源控制策略及参数分析[J]. 电工技术学报, 2014, 29(12): 1-10.
Meng Jianhui, Wang Yi, Shi Xinchun, et al. Control strategy and parameter analysis of distributed inverters based on VSG[J]. Transactions of China Electrotechnical Society, 2014, 29(12): 1-10.
[28] Jiang Jianbo, Liu Fei, Pan Shangzhi, et al. A conservatism-free large signal stability analysis method for DC microgrid based on mixed potential theory[J]. IEEE Transactions on Power Electronics, 2019, 34(11): 11342-11351.
[29] 夏杨红, 韦巍. 电力电子化电力系统暂态稳定分析新框架: 基于耦合因子的非线性解耦方法[J]. 中国电机工程学报, 2020, 40(16): 5102-5112.
Xia Yanghong, Wei Wei. New analysis framework for transient stability evaluation of power electronics dominated power system: coupling factors based nonlinear decoupling method[J]. Proceedings of the CSEE, 2020, 40(16): 5102-5112.
[30] 赵书强, 王慧, 田娜, 等. 基于模型预测控制的直流微电网虚拟惯性优化方法[J]. 电工技术学报, 2023, 38(12): 3264-3276.
Zhao Shuqiang, Wang Hui, Tian Na, et al. Model predictive control based DC microgrid virtual inertia optimal method[J]. Transactions of China Electrotechnical Society, 2023, 38(12): 3264-3276.
Abstract To ensure the stable operation of the system, the academic community has conducted a large amount of research on small signal modeling and stability analysis of DC microgrids. However, the conclusions of small signal analysis are only valid within a local range, and the size of this range is uncertain. Therefore, methods based on small signal analysis are difficult to solve the problem of large disturbance instability in DC microgrids. When the system switches from the initial steady-state point to the target steady-state point, oscillation instability often occurs when the load changes significantly. To this end, a stable control method considering the control parameters of analogous virtual synchronous generator (AVSG) and flexible load regulation is proposed.
Firstly, establish a Takagi Sugeno (TS) fuzzy model for the DC microgrid. Then, the Lyapunov function is constructed with the help of linear matrix inequality (LMI) tool to estimate the domain of attraction of the target steady-state point. If the largest estimated domain of attraction (LEDA) of the target steady-state point includes the initial steady-state point, then the system is asymptotically stable, otherwise there is a risk of instability. At this point, utilizing the flexible and adjustable virtual damping, virtual inertia, and flexible load resources within the DC microgrid, the LEDA of the target steady-state point can directly or indirectly include the initial steady-state point, thereby eliminating the risk of oscillation instability.
To verify the effectiveness of the proposed method, hardware in the loop (HIL) simulation experiments have been built.The test results of control parameters show that adjusting the size of kd and Cvir until LEDA includes the initial steady-state point can avoid the risk of system oscillation instability. In addition, the test results of the operating trajectory show that by adjusting the operating trajectory of the system's operating points through flexible loads, while meeting the final load demand, the domain of attraction of the latter steady-state point sequentially includes the previous steady-state point, which can ensure the stable operation of the system. Finally, the LEDA error test results show that the estimation of the attraction domain in this example has a certain degree of conservatism, and the proposed method is suitable for this scenario.
Conclusions can be drawn that: (1) Improving control parameters such as virtual damping and virtual inertia, as well as operating point trajectories based on domain of attraction theory, so that the LEDA of the target steady-state point directly or indirectly includes the initial steady-state point, is a practical and effective method to ensure stable system operation. (2) Compared with the dichotomy method, the method of adjusting the load power to the LEDA boundary can reduce the number of intermediate operating points and thus shorten the entire switching process. (3) Estimating the domain of attraction based on the TS fuzzy model and visually displaying the stability analysis results in a graphical manner can be used to guide the parameter tuning of AVSG.
Keywords:DC microgrid, large signal stability, domain of attraction estimation, analogous virtual synchronous generator, flexible load
中图分类号:TM71
DOI: 10.19595/j.cnki.1000-6753.tces.240206
国家自然科学基金资助项目(51807064)。
收稿日期 2024-01-30
改稿日期 2024-02-13
王 慧 男,1982年生,博士研究生,高级工程师,研究方向为高比例可再生能源主动支撑技术。
E-mail:wanghui@ncepu.edu.cn(通信作者)
赵书强 男,1964年生,教授,博士生导师,研究方向为电力系统分析与控制。
E-mail: zsqdl@163.com
(编辑 郭丽军)