海洋环境对水下无线电能传输系统的影响机理研究进展
王得安1 张剑韬1 朱春波1 别 致2 崔淑梅1
(1. 哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001 2. 哈工大郑州研究院 郑州 450000)
摘要 水下无线电能传输技术因其能够以非电气接触的形式在海域中实现能源供给,为解决水下无人设备的传统拔插式充电方式所存在的安全性差、寿命低、维护困难等问题提供了一种可行途径。然而,水下无线电能传输系统因复杂的海洋环境使其相比于以电动汽车为代表的陆基无线电能传输面临更多的挑战。该文首先围绕海水介质对无线电能传输系统的影响机理研究进行了详细的综述;其次,针对海洋环境和海水介质存在的附加涡流损耗、极间分布电容、深海压磁效应、海底洋流扰动等典型影响因素的研究进展进行了分析,对目前无线电能传输技术在水下无人装备应用存在的潜在问题和挑战进行说明;最后,对水下无线电能传输系统未来值得关注的研究方向进行展望。
关键词:水下无线电能传输 海洋环境 涡流损耗 无人潜航器 磁耦合机构
0 引言
随着科学技术的进步与发展,世界各国争相开始对海洋资源进行开发和探索[1-2]。水下无人装备作为海洋资源勘探和军事作战巡逻的重要设备,成为目前海洋工程领域的研究热点,具有广泛的经济、科学和军事价值[3-4]。
海洋国防科技关系着我国的领海安全,早在党的十八大上就已经从战略高度对我国海洋事业发展做出了全面部署[5],明确提出要“提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益,建设海洋强国”。经略海洋,必须要有捍权护利的强大军事力量,其中自主式无人潜航器(Unmanned Underwater Vehicle, UUV)作为最典型的水下无人装备,被称为现代海军的“力量倍增器”。UUV可以实现灵活的水下无人作业或无人协同作战,对于海洋攻防、反侦察巡逻等国防能力具有极大的提升作用[6-7]。
水下设备的典型电能补给方式、原理及各自优缺点的对比见表1[8-16],现阶段传统换电式和插拔式电能补给方式极大地限制了水下无人装备的充电安全性、可靠性、便捷性和隐蔽性[17-18]。为解决水下无人装备能源供给的瓶颈问题,无线电能传输(Wireless Power Transfer, WPT)技术正成为新型的水下电能传输方式[19]。它具有传统的电能补给方式无可比拟的技术优势,成为推进实现水下无人装备自动化作业和自主式能源补给的重要技术环节[20]。非物理连接下的电能传输,解决了海洋环境中常规电气连接点的密封难度大、对接操作复杂、电气打火和机械磨损等一系列问题,成为突破水下无人装备能量供给瓶颈、消除续航里程焦虑的重要途径[21]。
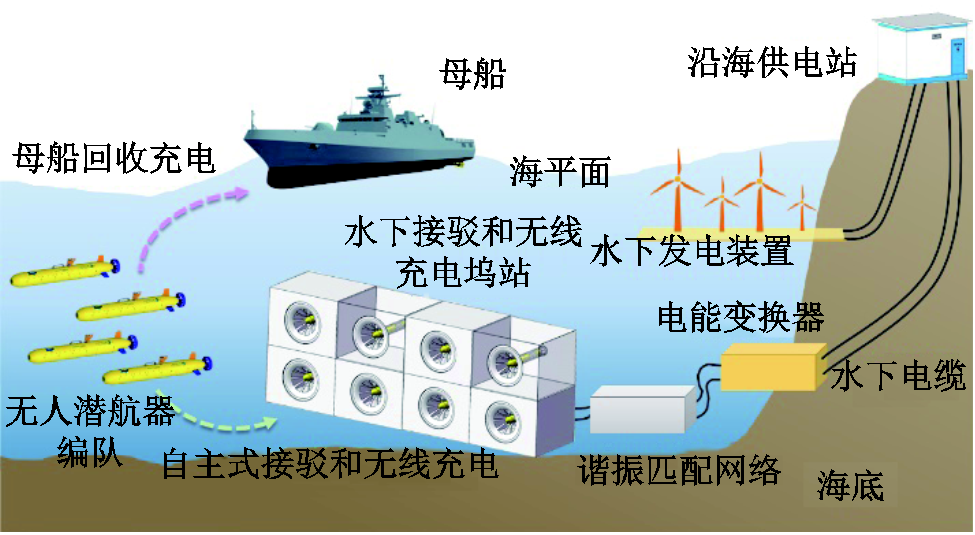
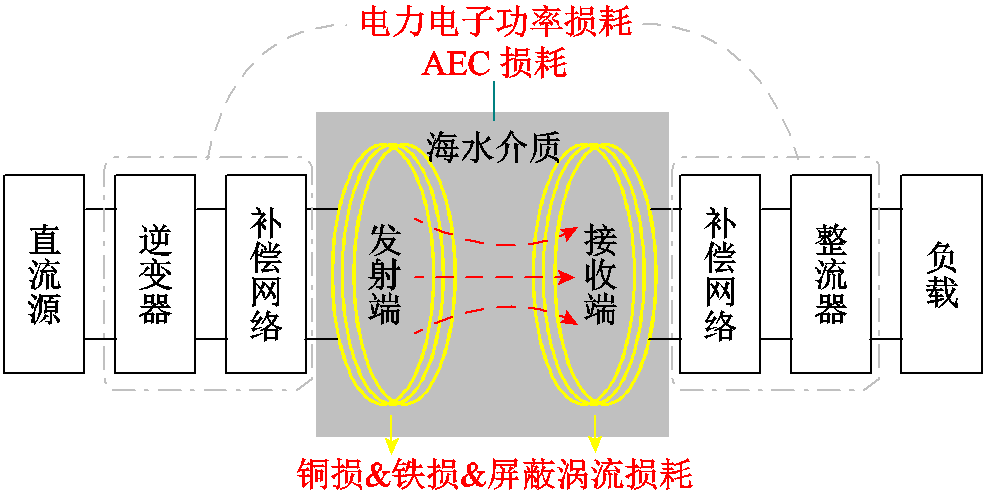
无线电能传输技术是构建我国未来陆-海-空-天能量网、信息网和观测网的重要技术组成部分[22-23]。以水下无人潜航器为代表的无线电能传输和能源供应网络示意图如图1所示。从国防角度来讲,面向自主式水下无人装备应用的水下无线电能传输(Underwater Wireless Power Transfer, UWPT)技术在拓宽基于岸基供电网络的布防范围、提升战时戒备布防速度,以及深远海争议性海域布防等方面具有重要的军事应用价值,对于提升无人作战和侦查能力具有重要意义[24]。
表1 水下无人装备电能补给方式、原理以及优缺点对比
Tab.1 Comparison of energy supply principles, advantages, and shortcomings of unmanned underwater equipment
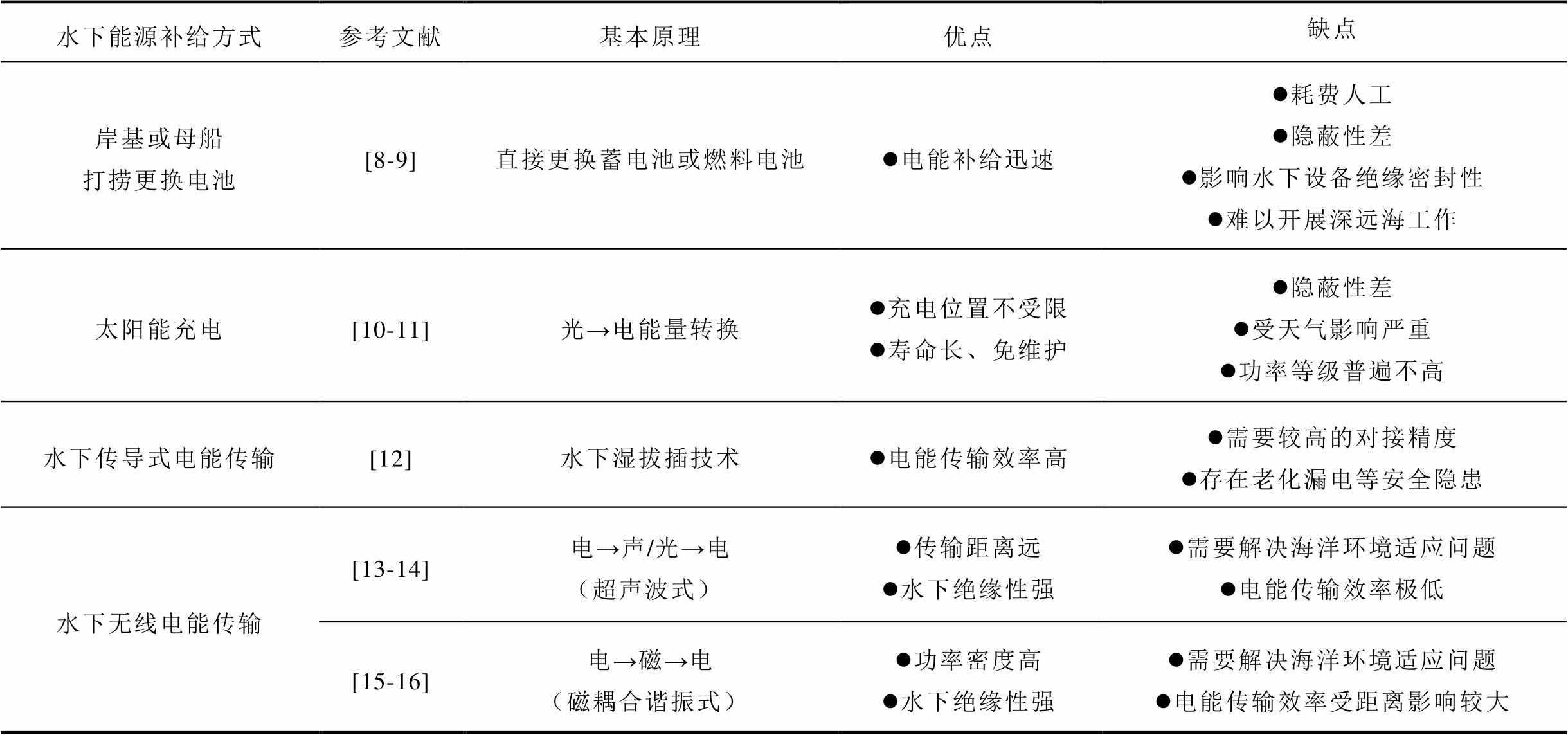
水下能源补给方式参考文献基本原理优点缺点 岸基或母船打捞更换电池[8-9]直接更换蓄电池或燃料电池l电能补给迅速l耗费人工l隐蔽性差l影响水下设备绝缘密封性l难以开展深远海工作 太阳能充电[10-11]光→电能量转换l充电位置不受限l寿命长、免维护l隐蔽性差l受天气影响严重l功率等级普遍不高 水下传导式电能传输[12]水下湿拔插技术l电能传输效率高l需要较高的对接精度l存在老化漏电等安全隐患 水下无线电能传输[13-14]电→声/光→电(超声波式)l传输距离远l水下绝缘性强l需要解决海洋环境适应问题l电能传输效率极低 [15-16]电→磁→电(磁耦合谐振式)l功率密度高l水下绝缘性强l需要解决海洋环境适应问题l电能传输效率受距离影响较大
然而,水下无线电能传输系统因复杂的海洋工作环境使其相比于以电动汽车为代表的陆基无线电能传输面临更多的挑战。随着国内外研究的不断深入,水下无线电能传输技术开始暴露出诸多研究问题和技术难点[25-26]。鉴于此,本文首先围绕海水介质对无线电能传输系统的影响机理研究展开了详细的综述;然后针对海洋环境和海水介质存在的附加涡流损耗、极间分布电容、深海压磁效应、海底洋流扰动等典型影响因素的研究进展进行了分析,对目前无线电能传输技术的水下无人装备应用存在的潜在问题和挑战进行说明;最后对水下无线电能传输系统未来值得关注的研究方向进行展望。
1 UWPT技术研究进展及其特殊性
典型的无线电能传输方式主要包括磁耦合谐振式、电场耦合式及激光式、微波式、超声波式等,它们的性能对比见表2。其中,电场耦合式对传输距离非常敏感,通常适用于近距离的无线电能传输领域[27];微波无线电能传输虽然传输距离较远,但是其功率容量较低且传输效率极低,不适宜大功率的无线电能传输[28];磁耦合谐振式无线电能传输技术因其能量传输效率高、传输距离较远等优势,已广泛应用于电子消费领域、交通领域、工业领域和一些特殊行业中,被广泛认为是最具有未来潜力的无线电能传输方式[29]。磁耦合谐振式无线电能传输技术的基本原理是将高频逆变电源产生的高频交流电流通入发射线圈,在发射线圈周围的空间内产生交变的高频磁场,高频磁场穿过接收线圈并形成高频感应电流,再经整流滤波等次级能量变换环节后向负载提供稳定的电能[30]。
表2 几种典型无线电能传输技术的特性对比
Tab.2 Comparison of the characteristics of several typical wireless power transfer technologies
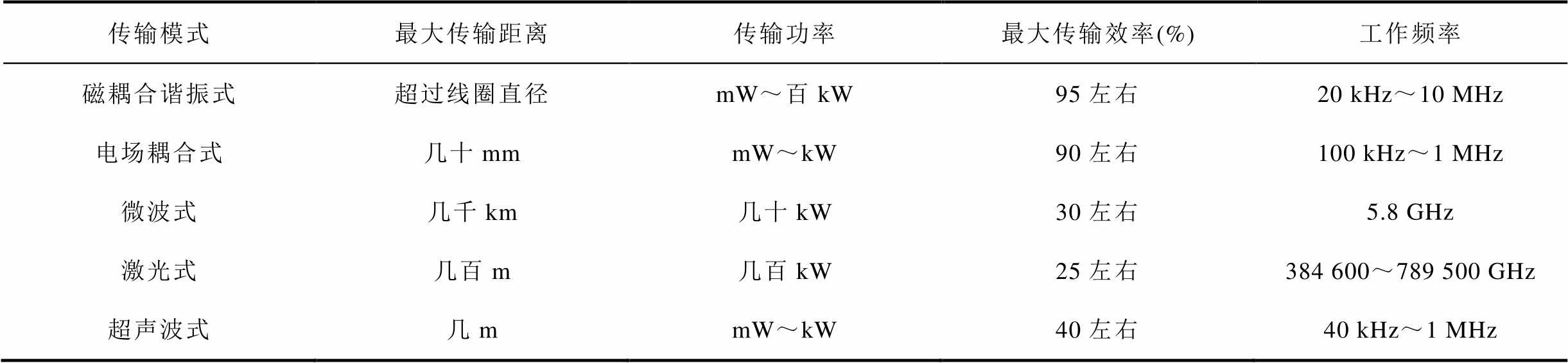
传输模式最大传输距离传输功率最大传输效率(%)工作频率 磁耦合谐振式超过线圈直径mW~百kW95左右20 kHz~10 MHz 电场耦合式几十mmmW~kW90左右100 kHz~1 MHz 微波式几千km几十kW30左右5.8 GHz 激光式几百m几百kW25左右384 600~789 500 GHz 超声波式几mmW~kW40左右40 kHz~1 MHz
在海洋环境中,海水介质的吸波特性会吸收大部分高频电磁波能量,因此对于GHz频段的微波传输而言接收端将无法有效获取发射端发送的电能;电场耦合式对极板距离的稳定性要求较高,目前还无法做到较大传输功率及较高的传输效率,且对失准敏感性较强;超声波模式传输功率很小,效率较低且对传输介质较为敏感;激光方式对定向精度要求高,传输效率低,且海底能见度、低精确定位困难[15]。相较之下,磁耦合谐振式无线电能传输技术在海洋环境下更具优势,尤其是在水下接驳技术[31]的辅助下,能够实现高效高功率密度以及较远距离的能量传输,具有广阔的军事和商业应用前景。
针对磁耦合谐振式水下无线电能传输技术,国内外研究机构展开了广泛研究,并取得诸多研究成果。近几十年来国内外研究机构在水下无线电能传输技术领域的主要研究进展和技术参数指标见表3[32-60]。其中,传输距离指的是原、副边线圈之间的间隙,严格意义上,该间隙包括海水溶液的厚度、磁耦合机构原、副边非金属外壳的厚度,甚至潜在存在的空气缝隙等。从表3中数据可以看出,相比于美国、日本等发达国家,我国在水下无线电能传输领域的研究虽起步较晚,但是在近年来取得了飞速发展,目前正朝着大功率、高效率、多场景应用、高功率密度以及高传输距离等研究方向开展深入的研究和探索,以水下无线电能传输系统作为节点的海洋能量网络的建设正在逐步完善[61]。
表3 近几十年来国内外研究机构在水下无线电能传输技术领域的主要研究进展和技术参数指标
Tab.3 The main research progress and technical parameter indicators of research institutions of underwater wireless power transfer technology in recent decades
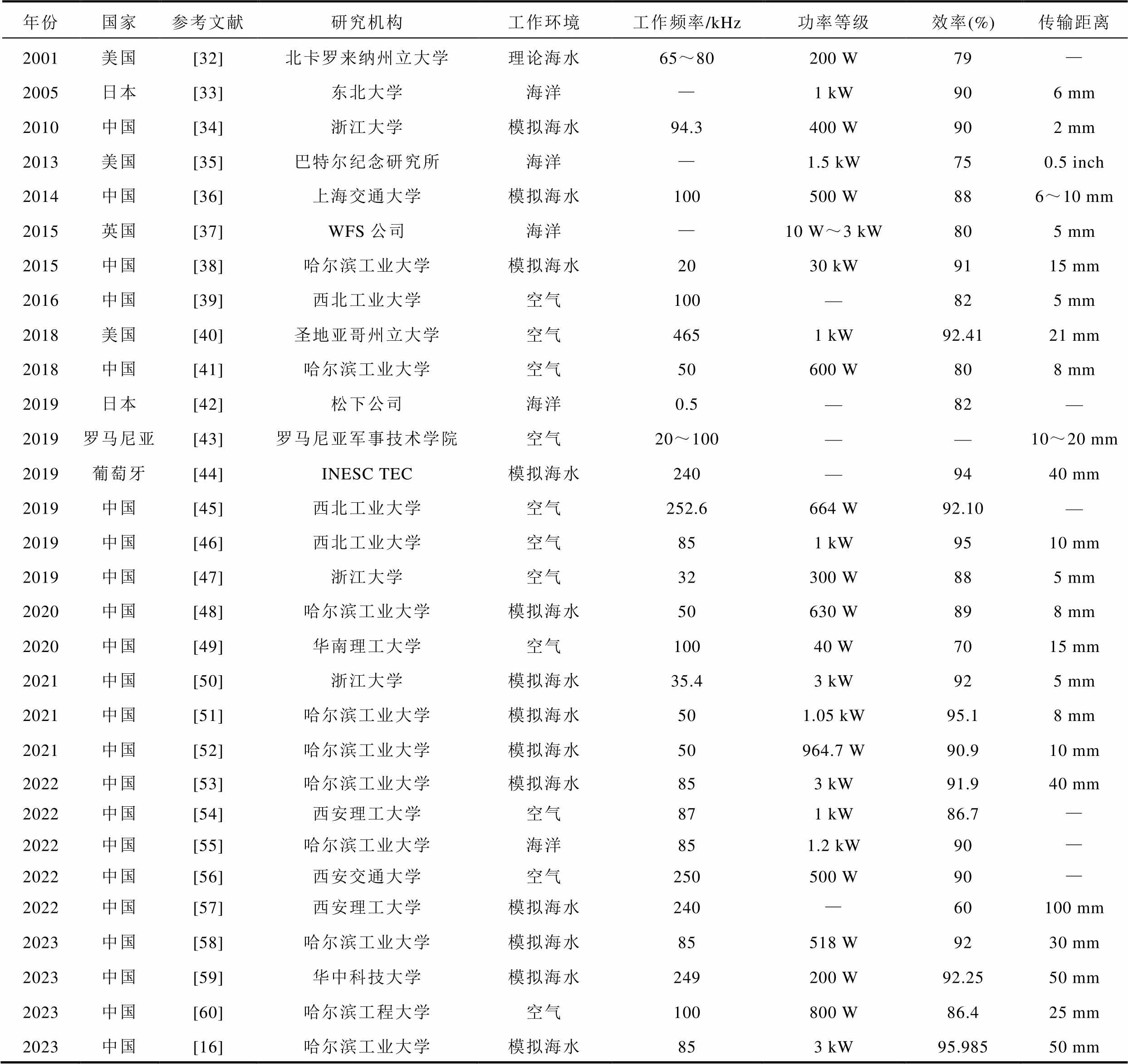
年份国家参考文献研究机构工作环境工作频率/kHz功率等级效率(%)传输距离 2001美国[32]北卡罗来纳州立大学理论海水65~80200 W79— 2005日本[33]东北大学海洋—1 kW906 mm 2010中国[34]浙江大学模拟海水94.3400 W902 mm 2013美国[35]巴特尔纪念研究所海洋—1.5 kW750.5 inch 2014中国[36]上海交通大学模拟海水100500 W886~10 mm 2015英国[37]WFS公司海洋—10 W~3 kW805 mm 2015中国[38]哈尔滨工业大学模拟海水2030 kW9115 mm 2016中国[39]西北工业大学空气100—825 mm 2018美国[40]圣地亚哥州立大学空气4651 kW92.4121 mm 2018中国[41]哈尔滨工业大学空气50600 W808 mm 2019日本[42]松下公司海洋0.5—82— 2019罗马尼亚[43]罗马尼亚军事技术学院空气20~100——10~20 mm 2019葡萄牙[44]INESC TEC模拟海水240—9440 mm 2019中国[45]西北工业大学空气252.6664 W92.10— 2019中国[46]西北工业大学空气851 kW9510 mm 2019中国[47]浙江大学空气32300 W885 mm 2020中国[48]哈尔滨工业大学模拟海水50630 W898 mm 2020中国[49]华南理工大学空气10040 W7015 mm 2021中国[50]浙江大学模拟海水35.43 kW925 mm 2021中国[51]哈尔滨工业大学模拟海水501.05 kW95.18 mm 2021中国[52]哈尔滨工业大学模拟海水50964.7 W90.910 mm 2022中国[53]哈尔滨工业大学模拟海水853 kW91.940 mm 2022中国[54]西安理工大学空气871 kW86.7— 2022中国[55]哈尔滨工业大学海洋851.2 kW90— 2022中国[56]西安交通大学空气250500 W90— 2022中国[57]西安理工大学模拟海水240—60100 mm 2023中国[58]哈尔滨工业大学模拟海水85518 W9230 mm 2023中国[59]华中科技大学模拟海水249200 W92.2550 mm 2023中国[60]哈尔滨工程大学空气100800 W86.425 mm 2023中国[16]哈尔滨工业大学模拟海水853 kW95.98550 mm
UWPT与传统WPT系统相比最大的特殊性体现在二者的工作环境和工况不同。一方面,海水介质与空气的电导率、相对介电常数等参数存在显著差异,这将影响系统的最佳工作频率、输出特性和工作状态。典型无线电能传输工作介质的电气参数对比见表4。另一方面,海洋环境的工况条件复杂度更高,这主要体现在深海水压和温度、无规律的洋流扰动、海洋浮游生物,以及水下无人装备的复杂壳体结构等。
表4 不同无线电能传输介质的基本参数对比
Tab.4 Comparison of basic parameters of different wireless power transfer medium

参数真空空气淡水海水 电导率/(S/m)000.014~6 相对介电常数1.01.0078.5081.00 相对盐度(%)——0.1~0.01≈3.5 相对磁导率—1.000.990.99
综上所述,从宏观上讲,针对上述的差异性问题应从两个大方向上对水下无线电能传输技术展开分析和研究。
1)海洋环境对UWPT系统影响机理
建立海水介质特性参量(电导率、相对介电常数等)、深海环境参量(温度、洋流、压强等)与水下无线电能传输系统电磁参量(自感、互感、频率、寄生内阻、极间电容、器件应力等)的关联映射关系,研究系统附加电涡流损耗及系统频率特性的影响规律、分布电容对系统谐振状态的影响规律、深海压强对系统电气参数的影响规律以及深海洋流扰动对系统输出参数稳定性的影响规律。
2)系统参数校正和能效优化方法
针对WPT系统与UWPT的参数差异,研究UWPT在海洋环境中的模型重构和参数修正方法,包括但不限于研究海水介质附加电涡流损耗和寄生阻抗的精确建模方法,海水介质涡流电阻和分布电容影响下的水下无线电能传输拓扑校正模型,以系统谐振频率优化为切入点研究系统损耗抑制方法,以及系统谐振漂移的预补偿设计和能效优化方法。
2 海洋环境对UWPT系统的影响机理
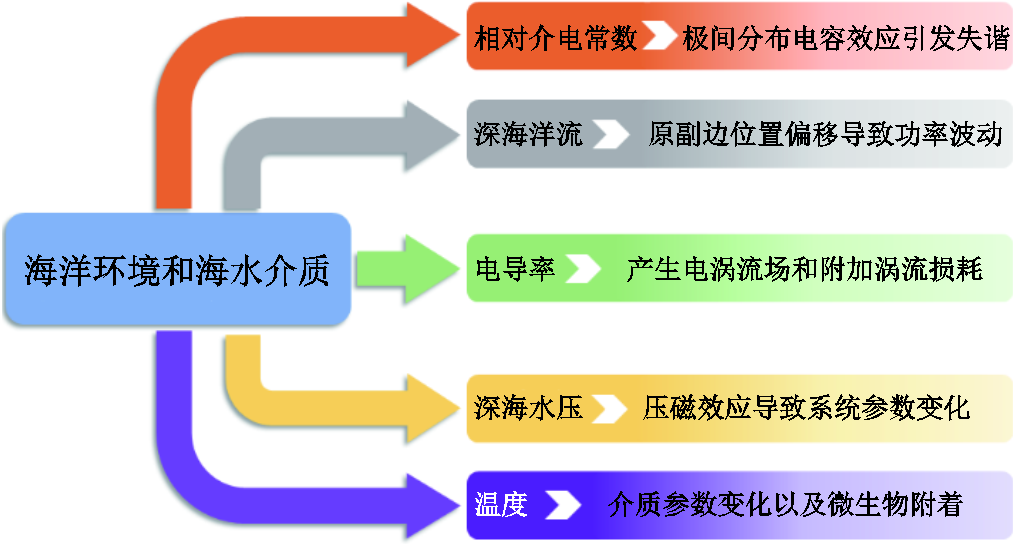
海洋环境和海水介质对WPT系统的影响主要体现在电导率、相对介电常数、深海洋流、水压及温度上,这将影响系统的工作状态、电能传输特性和可靠性。海水介质对水下无线电能传输系统的典型影响因素如图2所示,本节中将针对这些典型影响因素影响机理的研究进展和理论逐一展开综述和讨论。
2.1 海水介质附加涡流损耗
传输效率是衡量UWPT系统传输性能的重要指标之一。文献[62]指出,磁耦合机构的辐射阻抗是由海水介质中的涡流造成的。事实上,无论是较长的海底电缆还是耦合线圈,由于海水介质的导电性都会有额外的阻抗增加。辐射电阻的增加会导致额外的涡流损耗,辐射电抗的增加会导致系统谐振状态的偏差。由于海水介质的高盐度和高导电率,在较高的工作频率下,磁耦合谐振式UWPT系统的耦合线圈会在其周围的海水介质中感生附加电涡流场,造成额外的附加电涡流(Additional Eddy Current, AEC)损耗,并改变UWPT系统的性能。
文献[63-64]详细阐述了双面空心线圈AEC损耗的一般推导过程,文献[65]提出了一种在圆柱坐标系下计算无芯线圈电场强度的模型,以获得更精确的计算结果,如图3所示。其中Irx、Itx分别代表接收端和发射端的线圈电流,arx_n和atx_m分别代表接收端和发射端线圈第n和第m匝的线圈半径。
利用分离变量法,结合麦克斯韦方程组求解磁耦合机构柱面坐标系表征的亥姆霍兹方程,可以得到平面空心线圈的电场强度为
式中,i=1,2,3,代表图3中区域1,2,3;J(x)为第一种一阶贝塞尔方程;C1、C2为不定常数;λ为分离变量;ρ和z为分离变量法中的两个独立分量; ,ω为系统工作角频率,μ、σ分别为传输介质的磁导率和电导率。可以得出区域2中电场强度E2在原、副边线圈的合成分量的值为
,ω为系统工作角频率,μ、σ分别为传输介质的磁导率和电导率。可以得出区域2中电场强度E2在原、副边线圈的合成分量的值为
式中,eφ为圆周单位向量;d为原、副边介质间隙。
式(2)、式(3)是单匝线圈在E2中产生的合成电场分量的表达式,但是在实际水下无线电能传输系统中,发射端和接收端线圈应考虑线圈匝数影响,ai和aj分别为发射端和接收端第i匝或第j匝线圈的线圈半径,有
最终求得水下无线电能传输系统在海水环境中的附加电涡流损耗的解析表达式为
可以看出,UWPT系统的AEC损耗主要取决于磁耦合机构的安匝数、工作频率、线圈尺寸,此外还与传输距离和电导率等参数有关。其中,工作频率是WPT系统中能够实现灵活的设计参数之一,设计合理的UWPT系统工作频率范围是实现其高效、稳定、可靠运行的关键。UWPT系统工作频率设计和寻优将在第3.1节中展开详细论述。此外,额外的AEC损耗引入了海水寄生电阻,将会对系统拓扑参数和阻抗匹配带来一定的影响,这部分内容将会在3.2节中详细讨论。
UWPT系统AEC损耗分析方法的研究进展见表5[66-71],现有研究大致可分为三类。首先,有限元仿真方法可以定性地得到损耗分布和近似的AEC损耗结果,但难以反映各系统参数与AEC损耗之间的定量关系;其次,对含有磁心的磁耦合机构的分析通常基于磁心尺寸无穷大的假设,这在一定程度上影响了AEC损耗的准确性[72];最后,基于空心线圈的分析建模和数学计算可以准确表征电磁场的分析解,并建立系统参数与AEC损耗之间的映射关系。然而,这种方法忽略了磁心的影响,可能与实际UWPT系统的工作条件不符。随着近年来提出的带有限尺寸磁心的WPT磁耦合机构精确建模方法[73-74],UWPT系统的AEC损耗计算方法无疑将在未来得到进一步优化和改进。
表5 典型海水中涡流损耗分析方法的比较
Tab.5 Comparison of analytical methods for eddy current loss in seawater
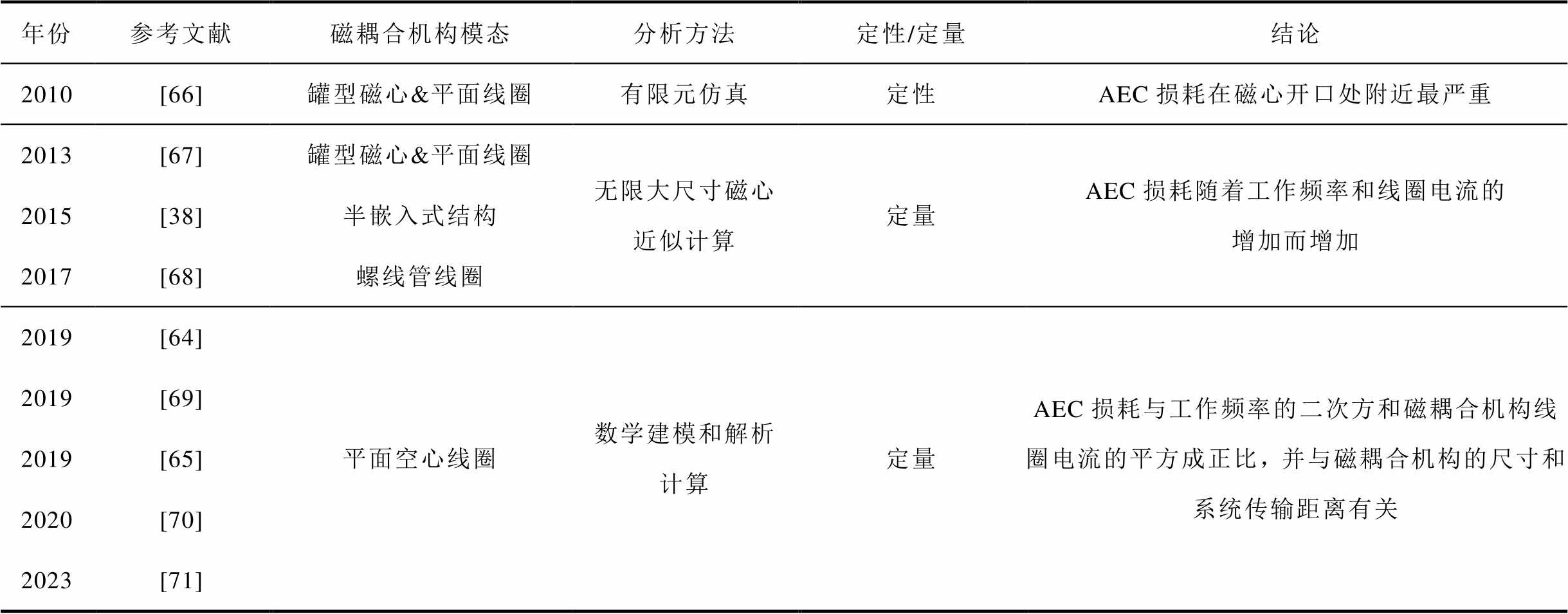
年份参考文献磁耦合机构模态分析方法定性/定量结论 2010[66]罐型磁心&平面线圈有限元仿真定性AEC损耗在磁心开口处附近最严重 2013[67]罐型磁心&平面线圈无限大尺寸磁心近似计算定量AEC损耗随着工作频率和线圈电流的增加而增加 2015[38]半嵌入式结构 2017[68]螺线管线圈 2019[64]平面空心线圈数学建模和解析计算定量AEC损耗与工作频率的二次方和磁耦合机构线圈电流的平方成正比,并与磁耦合机构的尺寸和系统传输距离有关 2019[69] 2019[65] 2020[70] 2023[71]
2.2 极间分布电容
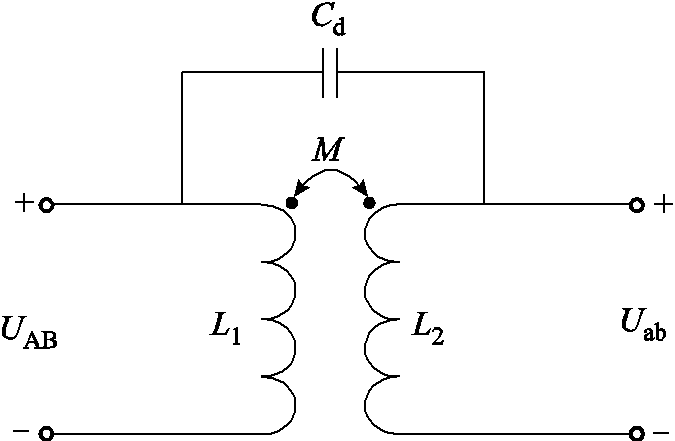
根据电容效应的理论,两个电势不等的导体之间会产生电场,因此会存在电荷积累和电场能量。对于UWPT系统,在工作过程中,由于发射端和接收端的电位差,线圈之间会产生极间分布电容效应。这种分布电容会在一定程度上影响UWPT拓扑结构。将磁耦合机构原、副边线圈之间的分布电容定义为Cd,如图4所示。分布电容Cd反映了磁耦合机构原、副边线圈之间电场能量,可以通过对各线圈之间电场储能的大小来确定。分布电容的大小与原、副边之间的传输介质的间隙距离、线圈形状、工作频率和相对介电常数有关[75]。
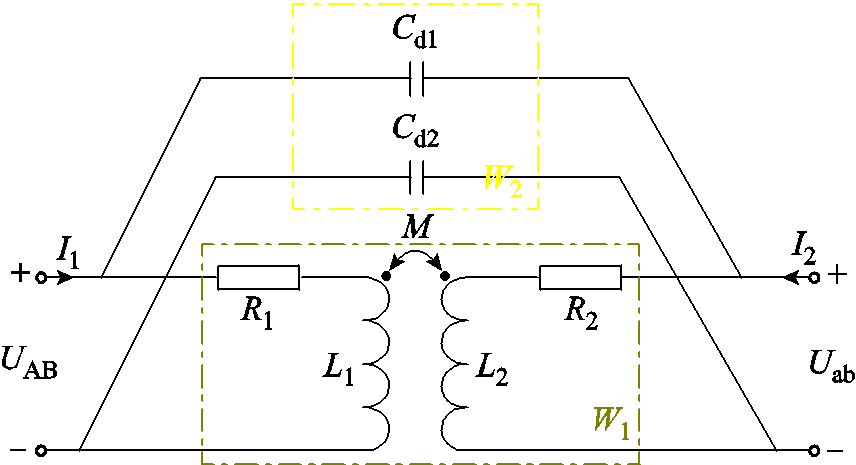
空气介质中的Cd在建模时一般可以忽略,但由于海水的相对介电常数显著高于空气介质,因此在拓扑设计和理论建模时需要考虑分布电容的影响。分布电容会经过磁耦合机构参与耦合,影响系统的谐振状态。由于电容的容抗会随着工作频率的升高而降低,低频时容抗较大相当于断路,对系统影响较小,但在高频工作时分布电容值变小,对磁耦合机构的影响将不可忽略。容抗的大小与导体的形状、导体之间的距离及电介质有关。含极间分布电容的S-S拓扑二端口网络如图5所示[76]。本文以图5为例进行分析,可以将分布电容拆分成两组方便实现对称建模和化简。
利用二端口网络分析可以得到系统拓扑的阻抗参数矩阵Z1为
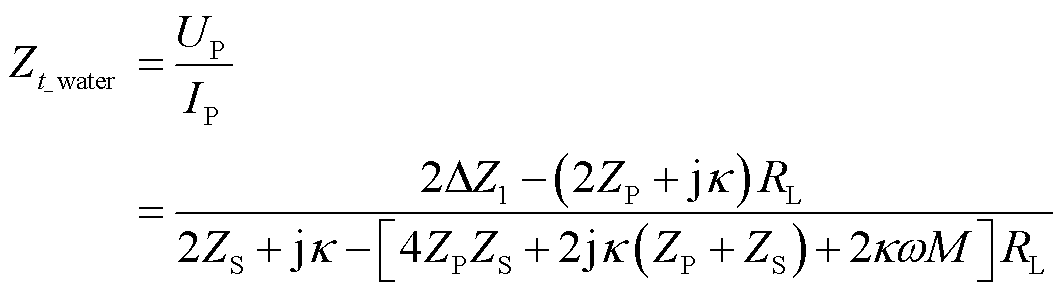
进而,通过二端口网络变换可以求解出海水介质条件下的系统总输入阻抗为
式中,ZP和ZS分别为忽略内阻条件下发射端和接收端的等效阻抗, ,
, ;
;
 ;
; ;LP和LS分别为发射端和接收端线圈电感;RL为等效负载内阻。
;LP和LS分别为发射端和接收端线圈电感;RL为等效负载内阻。
通常来讲,考虑海水极间电容影响的互感模型在低频段与空气中互感模型的频率特性曲线基本一致,工作特性相似,这是因为在低频段时磁耦合机构原、副边之间的分布电容较大,系统相当于断路;然而,随着系统工作频率的升高,分布电容逐渐减小,开始在系统中产生影响,与耦合器电感形成谐振回路,系统总阻抗角开始减小,极有可能导致系统谐振状态偏移,降低传输效率。
2.3 深海压磁效应
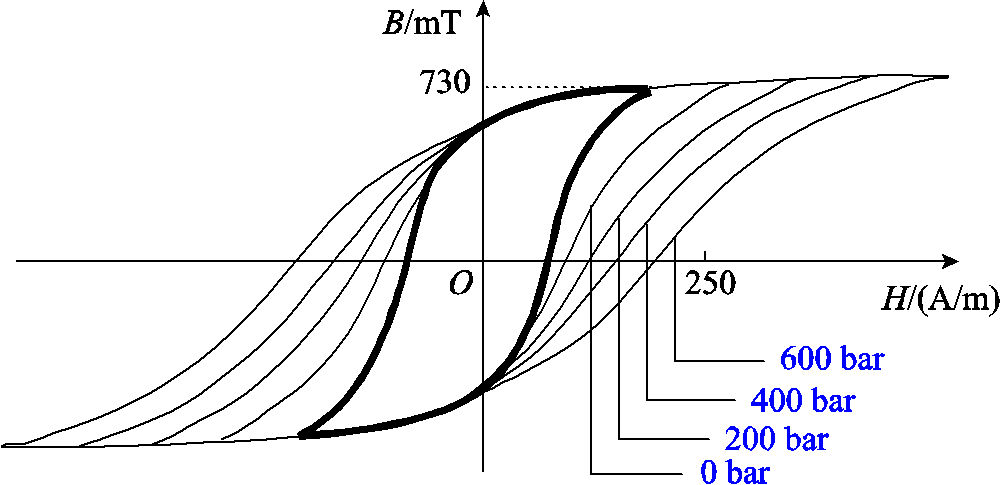
水下无线电能传输系统在深海环境中应用时,可能会因为深海高压而发生电气参数的改变,影响能量的传输效果。一般而言,这是由于高磁导率的软磁性材料因压磁效应导致材料磁导率随外部压力变化而产生变化。典型的功率铁氧体材料如Mn-Zn铁氧体、Ni-Zn等的磁导率在受到外部机械压力的条件下会产生参数变化。典型软磁材料压磁效应的磁滞回线变化情况如图6所示[77]。在压磁效应下,磁心的矫顽力会增加,磁导率会降低[78]。
磁导率μ主要取决于材料的磁化率 ,而磁化率与材料内部应力有关[79]。假设材料的初始应力为σ(0),受外压P后的内应力为σ(P),对应的磁化系数分别为
,而磁化率与材料内部应力有关[79]。假设材料的初始应力为σ(0),受外压P后的内应力为σ(P),对应的磁化系数分别为 和
和 。若Ms为材料的饱和磁化强度,α为材料的饱和磁化系数,l和δ分别为磁心磁畴壁的宽度和厚度,则有
。若Ms为材料的饱和磁化强度,α为材料的饱和磁化系数,l和δ分别为磁心磁畴壁的宽度和厚度,则有
式中, 。材料的初始磁导率和外压P下的磁导率分别为
。材料的初始磁导率和外压P下的磁导率分别为
式中,μ0为真空磁导率,μ0=4π×10-7 N/A2。
假设 ,
, ,则有
,则有
由于软磁体有 ,故式(11)可以简化为
,故式(11)可以简化为
可以看出,随着外部压力的增加,磁耦合机构软磁磁心材料的磁导率会呈现降低的趋势。然而,磁耦合机构中的自感系数主要依赖磁心的高磁导率,磁导率的下降必然会导致磁耦合机构中自感和互感的降低,造成线圈之间耦合程度的降低。特别地,当UWPT系统工作在深海海域时,如果不考虑压磁效应带来的系统参数变化,很容易引起拓扑谐振状态的偏移,导致系统不能工作在最佳功率点和最优效率区间。
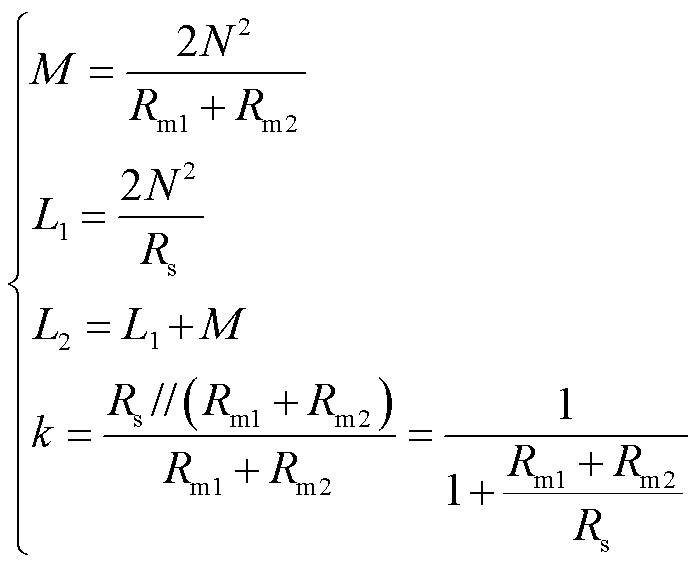
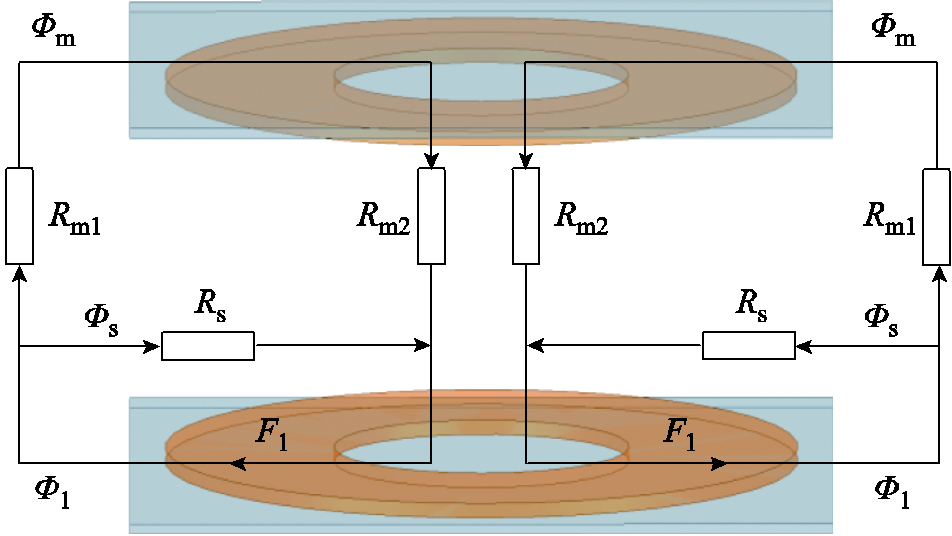
通过磁耦合机构的磁阻模型可以更直观地说明上述问题,典型UWPT系统平面式磁耦合机构的等效磁阻模型如图7所示[80]。由于磁导率的变化会直接影响磁心的磁阻参量,因此可以通过磁阻模型揭示深海环境的压磁效应下,磁心磁阻与UWPT系统耦合特性参数的影响关系。设Rs为自耦合磁阻,Rm1和Rm2为互耦合磁阻,Φ1为主磁通,Φs为自耦合磁通,Φm为互耦合磁通,F1为发射线圈产生的磁动势。平面式磁耦合机构线圈的磁通基本呈对称分布,因此其磁路模型也是左右对称结构,根据等效磁路模型可得磁耦合机构基本参数的表达式为
可以看出,随着海水压力的增大,磁心中的磁阻会增大,因而导致自感L1、L2以及互感值M下降,耦合系数k变化幅度不大。主磁路由磁心和间隙组成,主磁路的等效磁导率由间隙长度和磁心等效长度决定。因此,当传输间隙较小时,海水压磁效应的影响可能会更加明显和严重。一般来讲,当磁耦合谐振式UWPT系统的磁心相对磁导率高于 1 000时,磁导率的变化对系统电感值的影响并不明显;但当相对磁导率低于1 000时,尤其是对于UWPT系统定制高性能(高磁阻、低电导率)柔性纳米晶材料而言,将会带来系统电气参数的明显波动。
水下无线电能传输系统磁耦合机构通常外部安装有树脂、尼龙或玻璃纤维等复合材料组成的壳体,具备一定的承压能力和抗形变挤压特性。此外,随着非金属材料技术的不断提升,如SiAlON陶瓷等新型复合材料[54]正在被研究应用于无人潜航器等小型无人水下装备的壳体当中,具有很高的承压等级和绝缘特性。这也在很大程度上为解决磁耦合谐振式UWPT系统在铝合金、钛合金UUV船体中产生的涡流损耗问题提供了解决思路。值得注意的是,在km以上深海应用的无线电能传输系统中深海压力因素仍不容忽视,需要评估压磁效应给系统电感参数带来的影响范围,并进行适当的预补偿设计。
2.4 海底洋流扰动
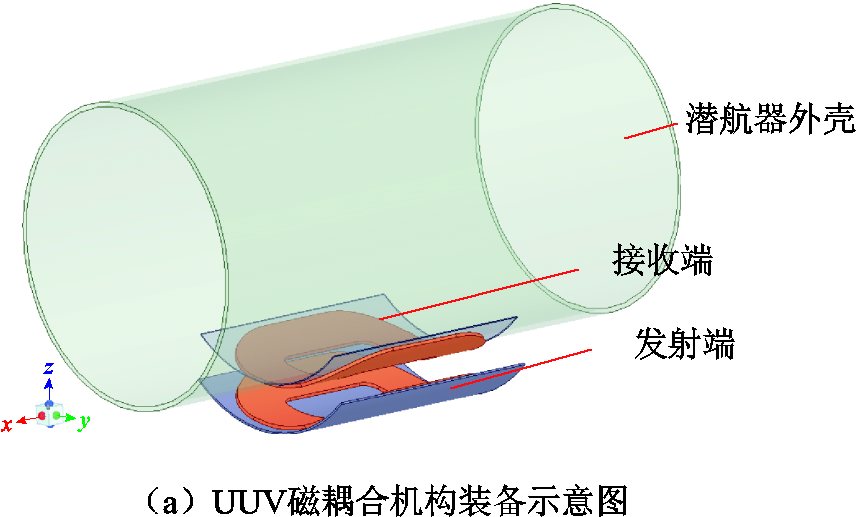
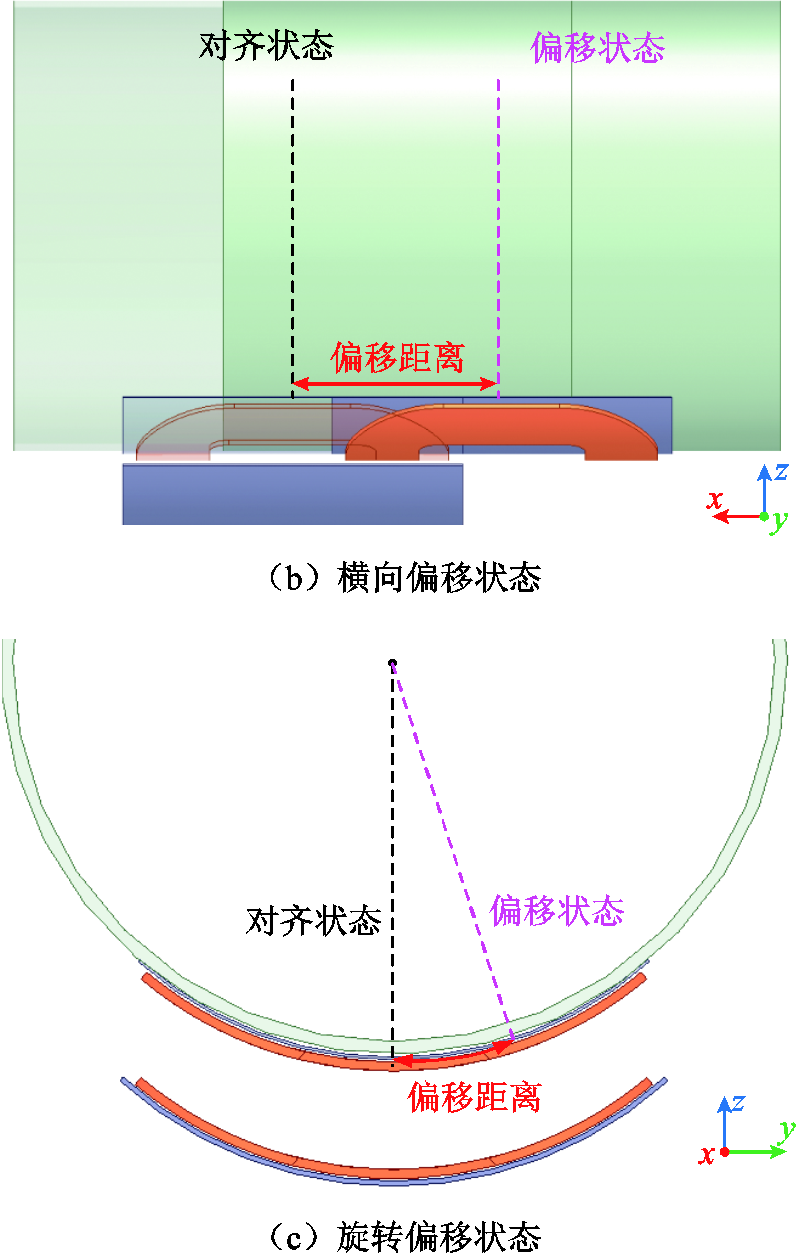
深海环境的另一个重要特征是海底洋流,洋流可能会导致UWPT系统磁耦合机构的原、副边线圈之间的错位,影响互感的稳定性。这将导致传输功率、效率的下降,甚至可能对电力电子设备造成过电压或过电流冲击。以自主式无人潜航器为例,如图8a所示,在海底洋流的影响下,可以认为有六个典型维度上的潜在偏移扰动,包括围绕x、y和z轴的旋转方向上的旋转偏移,以及沿着±x、±y和±z方向的轴向偏移。但随着水下无人装备的自主式接驳技术的发展,尤其是针对于UUV所设计的具备喇叭口引导机构的笼型接驳坞站的投入使用,深海洋流引起的大多数错位干扰都得到了较好的抑制。在借助接驳坞站辅助接驳和机械锁紧技术的基础上,通常认为只有沿±x轴的UUV行进方向的前后偏移和绕x轴的UUV横滚偏移需要在设计阶段被重点考虑[53,55],如图8b和图8c所示。
除了接驳技术外,从无线电能传输角度可以通过抗偏移补偿拓扑结构、抗偏移磁耦合机构和合理的抗偏移控制方法来抑制波动,提高系统功率传输的稳定性。值得一提的是,由于海底洋流扰动通常是不间断和不规则的,因此在工程化应用阶段仍有必要通过鲁棒控制算法来实现整个系统的可靠运行。
2.5 其他影响因素
除了上述典型的影响因素以外,海水盐度、温度及海洋活体生物和微生物都是影响UWPT系统运行的潜在影响因素。
海水的盐度和温度是影响其电导率参数的重要因素[81],相关研究表明,当海水温度变化1℃,电导率变化1.5%~2%。取25℃作为参考值,电导率随着温度的升高而增加;反之亦然。海水温度的垂直分布通常随着深度的增加而减小,并受到季节、纬度、洋流等因素的影响。因此,UWPT系统在不同的海水深度和区域工作时,其AEC损失是不同的。UWPT系统的热量主要以焦耳损耗的形式消耗,损耗分布如图9所示。系统中的总损耗包括线圈电阻引起的铜损耗、磁心中的磁滞损耗、海水中的涡流损耗、补偿电容器中的损耗以及逆变器和整流器中的开关损耗[82]。
海水作为一种良好的导热介质,比空气介质更有利于UWPT系统的散热。因此可以认为,在相同的电气参数条件下,UWPT系统存在进一步提高最大功率容量的潜力。
UWPT系统主要依靠导热绝缘材料封装磁耦合机构,并使用传热铜排桥接易发热的电力电子设备与UUV的外壳进行热传导散热[83]。通常,当UWPT系统运行时,磁耦合机构线圈的温度将上升到几十摄氏度,这种温度状态将加快磁耦合机构周围海洋微生物的生长[84]。微生物的附着会影响磁耦合机构的传输距离,并可能影响系统的传输效率。一种解决方案是使用特殊的散热涂层来防止微生物粘附,这需要定期维护[85]。此外,为了确保UWPT系统的长期可靠和自主运行,可能还需要安装与电动汽车无线充电系统类似的金属异物检测模块和活体生物检测模块[86]。
3 系统参数校正和能效优化方法
通过第2节中的分析可知,海水介质对UWPT系统的影响主要体现在系统参数的漂移、损耗增加和系统工作状态的稳态干扰等。针对这些问题,本节将从系统工作频率寻优、拓扑模型校正、动态跟踪调谐、抗偏移磁耦合机构、水下实时通信及系统控制策略六个方面展开讨论,结合现阶段UWPT技术研究热点和难点对系统参数校正和能效优化问题提供新的研究思路和方向。
3.1 系统工作频率寻优
提高磁耦合谐振式UWPT系统的工作频率有助于实现更紧凑、更轻巧的系统,提高系统的功率容量和效率,但会在海水中产生大量AEC损耗。这一矛盾意味着UWPT系统具有理论上的最佳工作频率,同时这是UWPT领域的研究热点。
海军空间与海战系统司令部太平洋中心的V. Bana等[87-88]早在2013年就率先在模拟海洋环境的盐水箱中研究了UWPT系统的最佳频率,为UWPT技术的研究和应用提供很高的参考价值。实验结果表明,当频率高于100 kHz时,海水开始对耦合器的电阻和耦合性能产生不利影响。然而,该系统的功率等级较低,不超过100 W。随后,A. Askari等[89]研究了功率水平为几kW的频率特性,发现系统效率在工作频率超过50 kHz时明显下降,远低于空气介质。哈尔滨工业大学程志远等[38]研究了超过10 kW的大功率UWPT系统的频率特性,数据显示当工作频率超过约36 kHz时AEC损耗将逐渐成为影响传输效率的主要因素。对海水介质中UWPT系统频率特性的典型研究见表6,并给出了一些关键参数[87-95]。研究得出不同结论的原因在于不同的功率水平、安匝数、线圈尺寸、导线类型、磁心类型和海水传输间隙,这与式(6)的推导分析结论相一致。因此,达到效率极值的最佳频率也不同。此外,上述许多研究中使用的模拟海水溶液是根据3.5%的平均海水盐度而非电导率参数来配置的,这也是一个差异影响因素。
表6 UWPT系统频率特性研究进展和关键技术参数
Tab.6 Research progress and key technical parameters of frequency characteristics of UWPT system
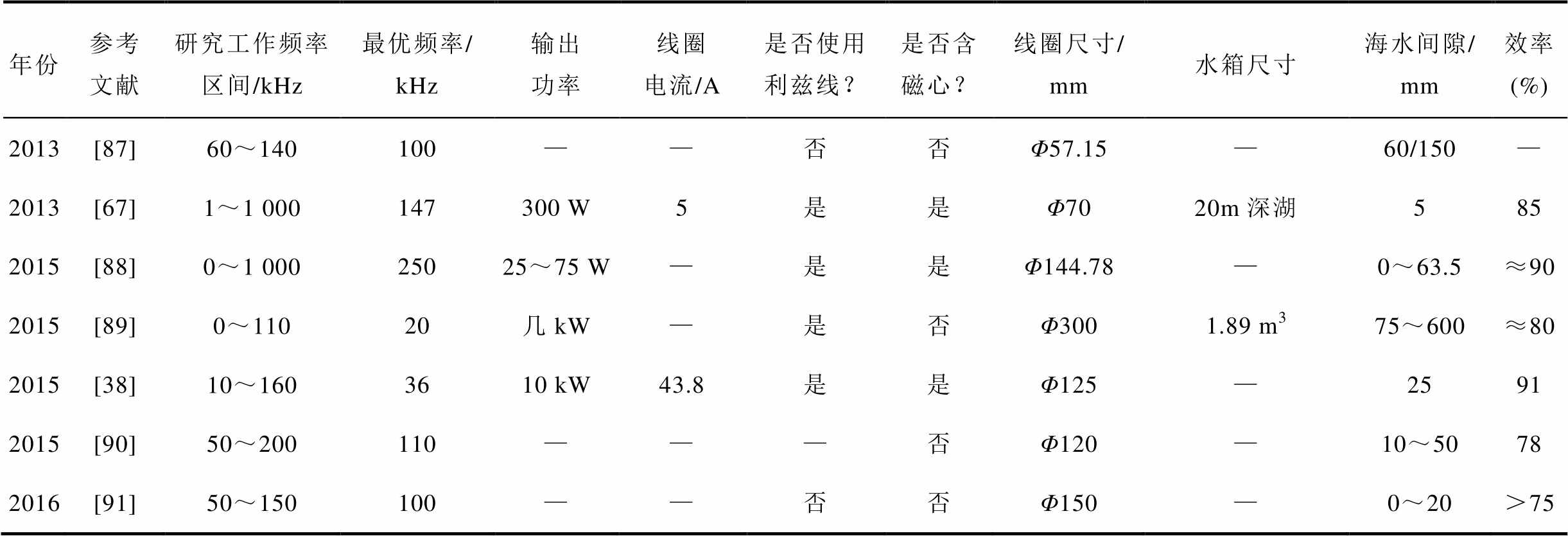
年份参考文献研究工作频率区间/kHz最优频率/kHz输出功率线圈电流/A是否使用利兹线?是否含磁心?线圈尺寸/mm水箱尺寸海水间隙/mm效率(%) 2013[87]60~140100——否否Φ57.15—60/150— 2013[67]1~1 000147300 W5是是Φ7020m深湖585 2015[88]0~1 00025025~75 W—是是Φ144.78—0~63.5≈90 2015[89]0~11020几kW—是否Φ3001.89 m375~600≈80 2015[38]10~1603610 kW43.8是是Φ125—2591 2015[90]50~200110———否Φ120—10~5078 2016[91]50~150100——否否Φ150—0~20>75
(续)
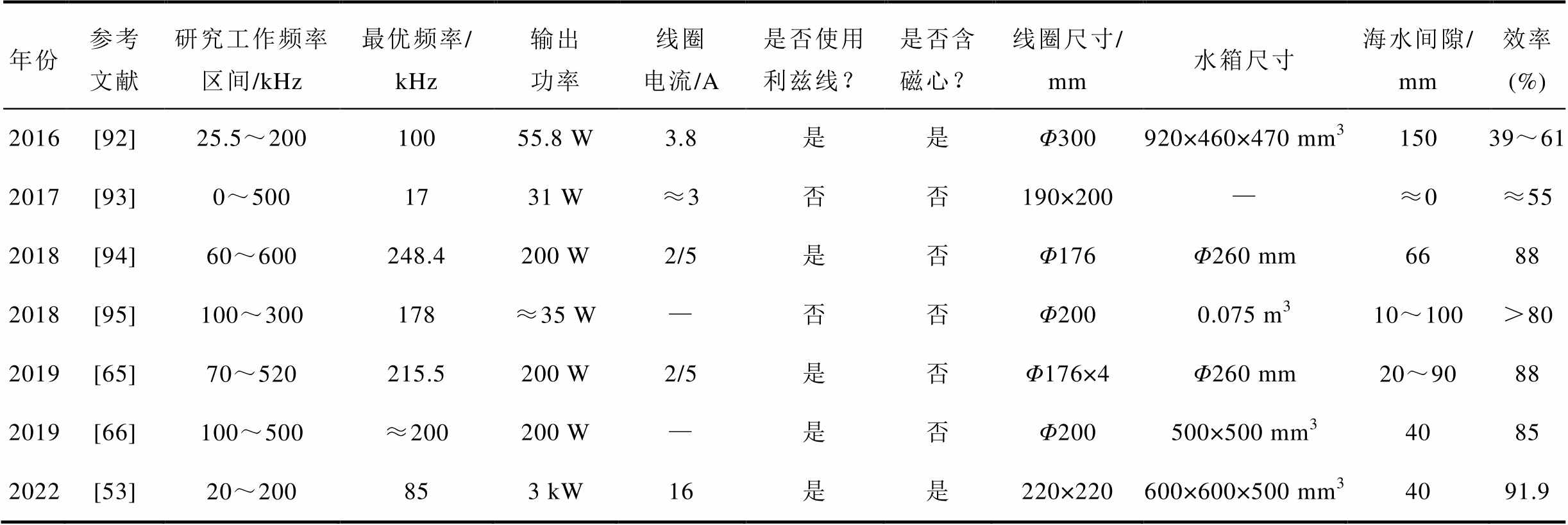
年份参考文献研究工作频率区间/kHz最优频率/kHz输出功率线圈电流/A是否使用利兹线?是否含磁心?线圈尺寸/mm水箱尺寸海水间隙/mm效率(%) 2016[92]25.5~20010055.8 W3.8是是Φ300920×460×470 mm315039~61 2017[93]0~5001731 W≈3否否190×200—≈0≈55 2018[94]60~600248.4200 W2/5是否Φ176 Φ260 mm 6688 2018[95]100~300178≈35 W—否否Φ2000.075 m310~100>80 2019[65]70~520215.5200 W2/5是否Φ176×4Φ260 mm 20~9088 2019[66]100~500≈200200 W—是否Φ200500×500 mm34085 2022[53]20~200853 kW16是是220×220600×600×500 mm34091.9
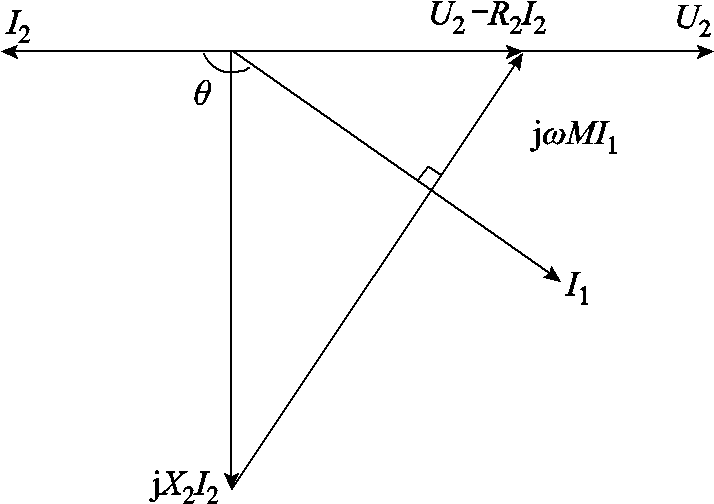
WPT系统的原、副边电流I1和I2之间存在一个相位差θ,该相位差大约与E2t和E2r的相位差相同。然而,当系统工作在在海水环境中时,发射端电流I1和接收端电流I2之间的相位差θ将不再为90°[70],如图10所示。I1和I2之间的相位差大约与归一化的工作角频率成正比,这意味着E2t和E2r之间的相位差随着工作频率在谐振频率附近升高而增大。基于余弦定理可以看出,合成电场强度E2减小,AEC损耗将减小。这与上述得出的涡流损耗与频率的二次方成正比的结论存在矛盾。可以认为磁耦合谐振式UWPT系统在谐振频点附近时,AEC损耗随着频率升高呈现先降低后升高的趋势。因此,UWPT 系统的最佳工作频率应略微大于拓扑谐振频率[64]。
总而言之,UWPT系统最佳频率的选择是一个需要考虑许多因素,如 AEC 损耗特性、开关器件的高频损耗、阻抗匹配特性以及磁耦合机构的功能条件要求的综合评估过程。此外,必要时还应考虑使用多目标优化算法进行辅助设计[96]。
3.2 系统拓扑模型校正
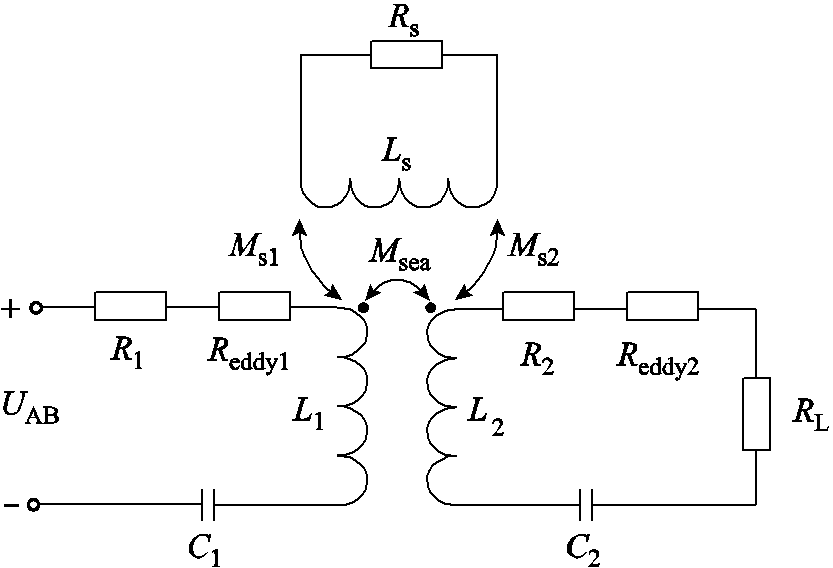
海水介质对UWPT系统带来的涡流损耗可以用涡流损耗电阻的形式进行表征,给系统阻抗匹配带来一定的影响[97]。考虑涡流损耗电阻和海水介质交叉耦合效应的UWPT修正拓扑模型如图11所示。磁耦合机构的感应磁场在海水中产生涡流,涡流产生的磁场又与线圈磁场交叉耦合[98]。将磁耦合机构原、副边线圈分离独立考虑,Reddy1和Reddy2分别代表原边线圈和副边线圈的涡流寄生电阻。Msea是海水介质中的互感,由于谐振状态的轻度漂移,它与空气中的互感略有不同[99]。
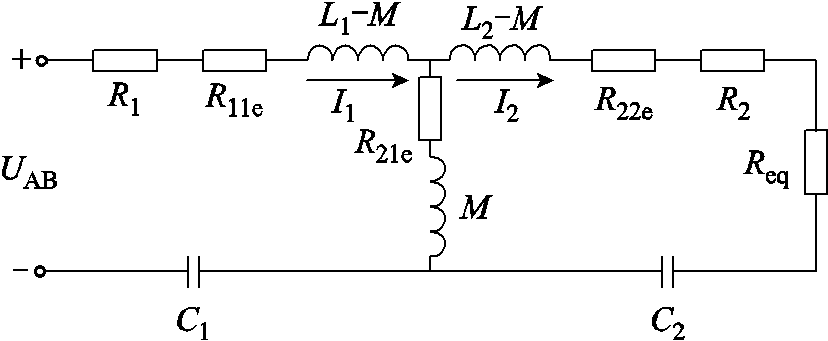
韩国科学技术院[65]利用T型网络等效,利用Z参数直观地将AEC损耗以电阻元件的形式反映在拓扑结构中,如图12所示。利用阻抗映射方法,可以求解海水介质条件下UWPT系统拓扑的输入阻抗、涡流损耗以及传输效率的一般表达式(14)~
式(16)。在考虑I1和I2之间相位差的前提下,可以在不需要电场的复数体积积分的条件下实现AEC损耗的精确计算。进而,结合图5中分布电容模型,可以对UWPT系统拓扑进行修正建模和计算。
式中,R11e、R22e、R12e为等效T型网络中的三个等效桥臂电阻。
另一方面,通过混合补偿网络的设计能够实现UWPT系统抗偏移特性、恒压或恒流输出特性、负载稳定性以及容错能力的提升[100]。值得注意的是,混合拓扑增加的无源元件会造成额外的损失和提高设计复杂性[101],尤其是补偿电感通常体积质量较大,会严重降低接收侧的功率密度[102]。
3.3 抗偏移磁耦合机构
对于WPT系统而言,磁耦合机构的抗偏移设计可以采用复合线圈[103]、解耦线圈[104]或多线圈阵列结构[105]的形式,以实现空间磁场的均匀化和发射端覆盖面积的扩大。此外,多线圈耦合机构中的一些线圈可以又用作补偿电感,以实现具有抗偏移和高集成度的智能设计[106]。然而,多线圈结构不利于轻量化设计,并且复杂性高,过多的补偿装置将引入额外的无功功率。因此,参数设计需要综合考虑无功补偿、软开关条件、系统容量、互耦合范围等因素。
如2.4节中所述,在接驳坞站的功能辅助下,面向潜航器应用的UWPT系统只需要重点考虑轴向和旋转两个方向上的偏移。因此,相比于电动汽车无线充电系统,UWPT系统磁耦合机构在模态上具有更高的设计灵活性和自由度。UWPT磁耦合机构可以利用线圈和磁心结构的多模态实现磁集成设计和抗偏移设计。
作为UWPT系统最重要的组成部分,磁耦合机构的模型形式决定了其适用场景,其优化参数设计将直接影响系统的整体效率。为了适应水下无人设备的运行条件,UWPT系统的磁耦合机构相比于电动汽车WPT系统应具备更高的设计要求。典型的水下抗偏移磁耦合机构见表7[107-110],包括曲面型、嵌入型、类电机型等设计模态。可以看出,利用磁耦合机构模态设计是实现UWPT系统抗偏移冗余和抗扰动被动容错的重要途径之一[111]。但在设计阶段仍需要严格考虑磁耦合机构模态的共形化和轻量化设计,确保UWPT系统不会影响水下设备的流体力学特征。
表7 典型的水下无线电能传输系统磁耦合机构模态比较
Tab.7 Comparation of typical UWPT system magnetic coupler model
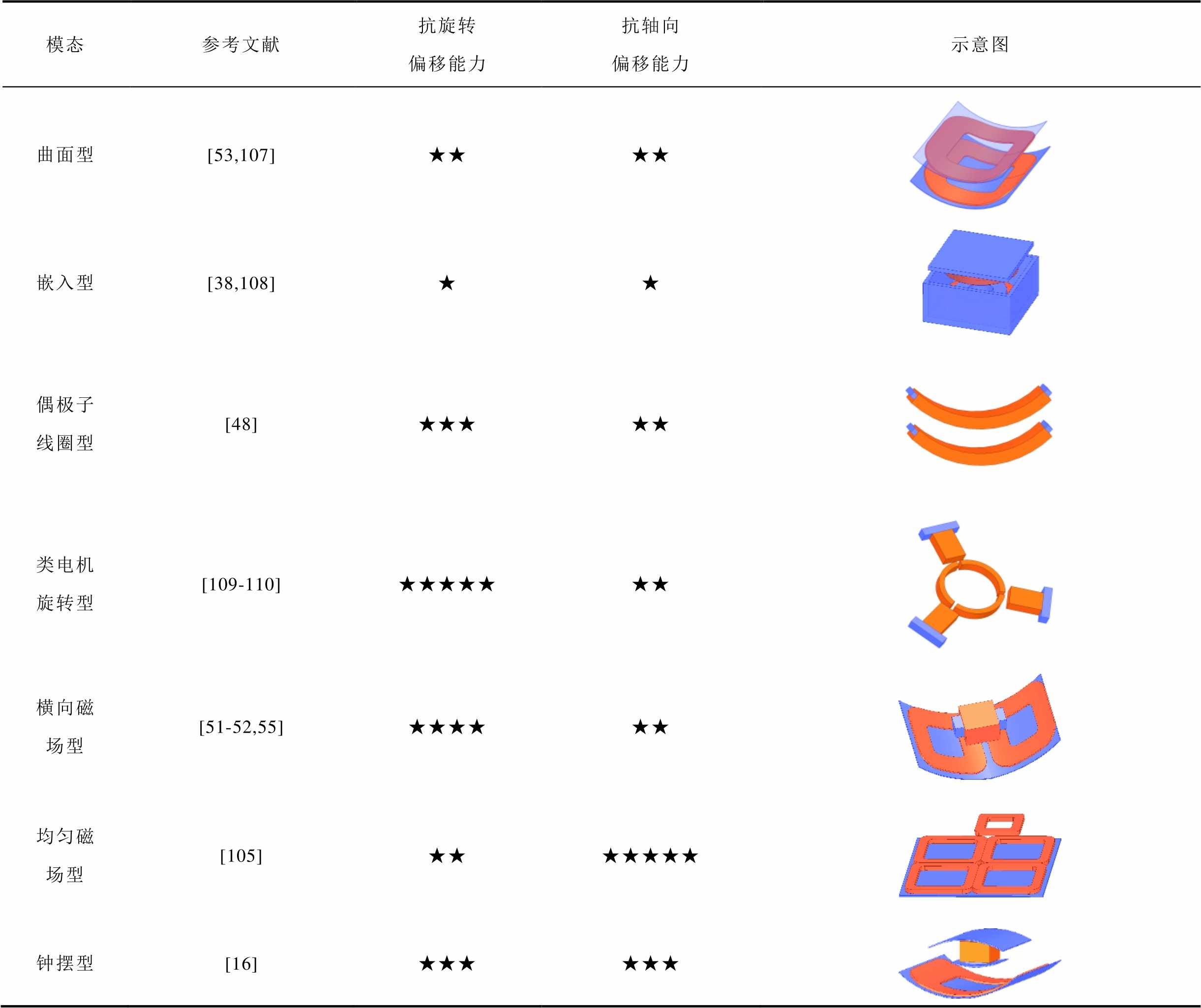
模态参考文献抗旋转偏移能力抗轴向偏移能力示意图 曲面型[53,107]★★★★ 嵌入型[38,108]★★ 偶极子线圈型[48]★★★★★ 类电机旋转型[109-110]★★★★★★★ 横向磁场型[51-52,55]★★★★★★ 均匀磁场型[105]★★★★★★★ 钟摆型[16]★★★★★★
3.4 系统动态跟踪调谐
根据第2节中有关海水介质参数对系统谐振状态的影响分析可知,UWPT系统在实际工作状态下可能会存在持续且不规则的谐振漂移,这对于系统的高效可靠运行极为不利。为了解决失谐问题,一方面,应根据3.2节中修正后的补偿拓扑网络进行参数预补偿设计,即在设计和样机研制阶段率先将海水介质影响考虑在内;另一方面,则需要利用主动控制策略对系统谐振状态进行跟踪和调节。
要保证UWPT系统工作频率和谐振频率一致,通常可以从两个角度考虑:一是不改变系统器件的电气参数,通过动态调节系统工作频率实现频率跟踪;二是通过改变可调无源器件的电气参数,从而实现系统拓扑的动态补偿来匹配谐振频率和逆变器工作频率。
其中,频率跟踪控制具有实现简便、调整速度快的优点[112]。典型的频率跟踪控制是指通过检测发射端或接收端的电流,调整逆变器的工作频率,使得WPT系统的工作频率与谐振频率一致。此外,锁相环、阻抗匹配、PI控制、Buck变换器等技术也被广泛地应用于系统频率跟踪性能的提升[113-114]。
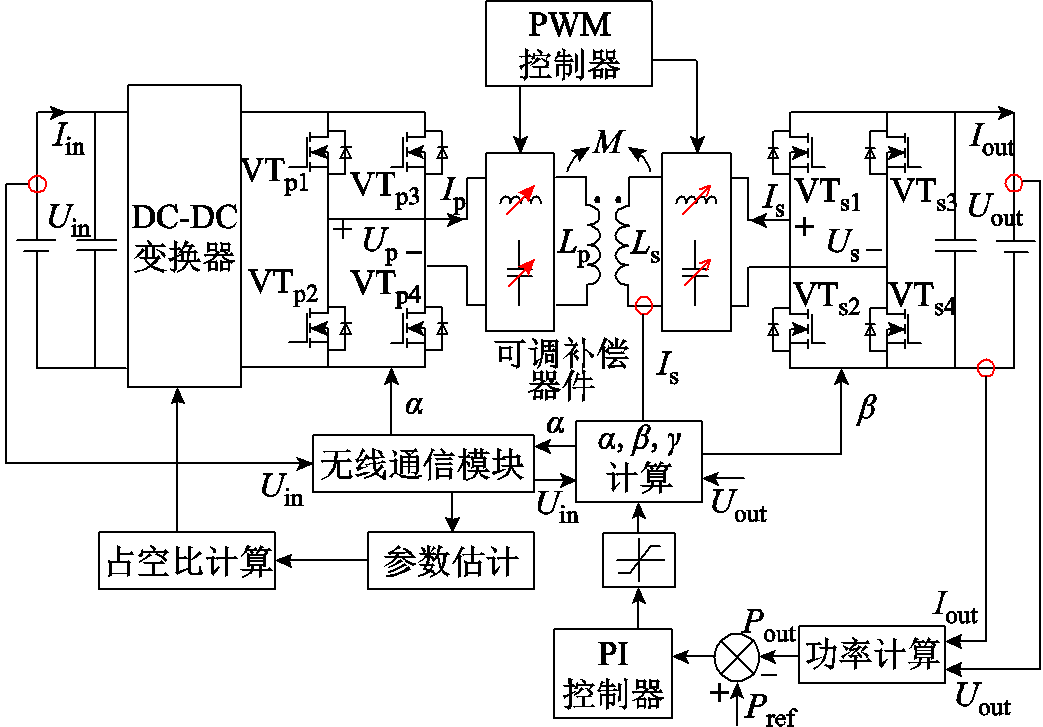
基于可调无源器件的动态跟踪调谐则是利用可调电容器[115]或可调电感器[116]实现谐振状态校正的控制方法,也是目前UWPT系统参数校正控制方法的研究热点[117]。基于可调电容和可调电感的系统谐振校正典型闭环控制原理如图13所示[118]。但由于非线性调节特性,它可能会增加成本和系统体积,同时显著提高系统的复杂性[119]。
3.5 系统控制策略
典型的WPT系统控制策略可以从四个方面进行调制,包括逆变器控制、补偿网络控制、整流器控制和直流变换器控制,这些控制理论与UWPT系统是相一致的。逆变器控制策略通过调节脉冲宽度[120]、脉冲密度[121]和脉冲频率[122]变量来实现传输增益的控制[123],整流器控制策略与逆变器控制方法类似[124]。直流变换器控制策略可以根据采集到的负载信息调整占空比,实现对传输增益的调节,具有控制精度高、调节范围宽的优点[125]。直流变换器控制可以在原边、副边、或双边同时进行[126]。
相较而言,UWPT系统需要更多地关注系统效率和可靠性控制,即最大效率跟踪和抗扰动控制[127]。最大系统效率跟踪控制可以通过对系统输入和输出参数进行采样并估计谐振状态[95],调整Buck/Boost转换器、逆变器或整流器的内部和外部相移角,以及通过谐振参数动态补偿来实现。考虑到水下无人装备的轻量化设计要求,建议采用原边控制策略并将控制器应安装在发射端的接驳坞站中。抗扰动控制则需要再考虑海底洋流无规律扰动、潜航器锂电池充电时负载特性变化以及系统谐振参数波动等扰动因素,建立扰动观测模型并提出UWPT系统鲁棒控制策略以降低相关因素对系统输出的敏感性[128]。具体的控制方案需要根据UWPT系统实际运行情况和锂电池负载的充电参数要求进行设计[129]。
3.6 水下实时通信
目前制约UWPT系统控制技术发展的一个重要因素是水下通信问题。为了确保系统控制策略的可靠性和快速鲁棒性,通常需要通过原、副边通信交换系统的电气参数,而通信的速度和准确性对于双边协同控制的可靠性至关重要。然而,海水介质的吸收效应严重削弱了传统蓝牙、Wi-Fi和Zigbee模块的通信距离、速率和准确性,增加了系统闭环控制的复杂性,水声通信传输速率慢且硬件成本较高[130],激光信息传输存在不易对准和受传输路径能见度和遮挡的影响[131]。
为解决上述问题,UWPT控制技术和与之匹配的实时通信技术主要朝着两个方向发展。第一种是基于系统谐振参数或互感参数自估计的无通信或弱通信控制。它的优点是在没有通信模块干预或通信速率很慢的情况下大致获得系统双边的工作状态。系统控制器可以安装在一侧来实现单边自主监测和控制[132]或双边同时自调谐控制[133],被认为能够实现甚至比基于无线通信的控制策略更短的控制响应时间[134]。
另一个研究热点则是利用磁通信方式实现共享链路或分离链路的信息传输,具有传输速率高、适用性强、集成度高、成本低等优势[59,135]。这种能量与信息同步传输的方式可以在不需要额外通信模块的情况下实现高效的实时通信,能够在海水介质实现超过1 Mbit/s的实时通信速率[136],并且不容易受到海水介质吸收的干扰,被认为是水下近场通信最具潜力的解决方案[137-138]。
4 亟待研究的问题与展望
4.1 亟待研究的问题
目前针对海洋环境对UWPT系统的影响机理研究仍存在诸多不足,主要包括:
1)缺乏UWPT系统在海水介质中拓扑参数预补偿的一般设计方法和体系。
2)磁耦合机构磁材料受压磁效应导致的参数变化仍难以实现离线或在线监测,对不同磁材料难以实现准确的形变参数预估。
3)大多数研究聚焦于最大效率跟踪和系统参数补偿控制,而忽略了实际海底洋流环境下的扰动和容错控制问题。
4)目前UWPT系统近场通信问题仍未形成一套高效且可靠的解决方案。
5)有关于电磁辐射对海洋环境和海洋生物的影响问题,尚未得出强有力的科学结论,无法有效开展深海UWPT工程生态环境影响评价。
6)磁热使得浮游生物附着导致传输距离变化等问题仍未有有效的后期维护方法。
此外,从UWPT技术本身的发展角度来讲,亟待研究和解决的问题主要有:
1)目前水下无人装备口径、负载参数多样,缺乏统一的不同功率等级下的充电电压电流等级、容许波动程度约束,即缺乏相关行业标准。
2)伴随水下无人装备的集群体系的构建,需要重点关注UWPT技术的互操作性,包括电气互操作(通信、拓扑和线圈)和机械互操作(接驳和锁紧),以提升无人系统执行和完成任务的协作能力。
3)现有研究大多针对某项技术展开,缺乏对UWPT系统和其所适配的UUV的系统级设计,包括磁耦合机构、电气拓扑、磁热均衡、电磁兼容、高压绝缘,以及集成化、轻量化、可靠性等设计。
4.2 未来展望
以UUV为代表的水下无人装备作为探测、研究和保卫海洋最关键的装备,在水下军事目标监测、海底地形观测和灾害预警、海洋资源开发等领域具有广阔的应用空间,是未来陆-海-天-空一体化网络中至关重要的移动节点[139]。在此背景下,UWPT技术因其具有无火花、隐蔽性、灵活性和适合无人操作等特点而受到广泛关注,其技术实现为解决水下装备能源供给问题和巡航航程限制提供了一种新的手段。就像智能手机无线充电技术的首次推出一样,用于水下装备的UWPT充电站将逐渐在未来的海洋军事和商业领域中得到应用和普及。
UWPT技术的发展需要进一步地关注磁耦合器的多模态、集群操作、远距离和大功率设计等研究重点,克服深海环境造成的通信可靠性和介质干扰问题。另外,高性能软磁材料和复合非金属潜航器外壳材料是推进UWPT技术工程化应用的关键[140-141]。在从原理样机到工程产品的迭代过程中,还应考虑集成新型GaN宽带半导体电力电子器件以减小系统封装尺寸,实现系统级优化设计。随着未来水下无人装备的不断应用,UWPT的互操作性和相关行业标准也需要进一步关注。
5 结论
水下无线电能传输技术因其安全、便捷、隐蔽、适用于无人作业等特点在近年来得到了飞速发展,被认为是解决当前无人水下装备能量补给和航程焦虑问题的有效途径之一。本文针对海洋环境对水下无线电能传输系统影响机理研究进展展开了全面综述,讨论了海水介质附加电涡流损耗、极间分布电容、深海压磁效应、海底洋流扰动等因素对水下无线电能传输系统的影响规律。针对上述影响问题,本文从系统工作频率寻优、拓扑模型校正、抗偏移磁耦合机构设计、系统动态跟踪调谐、系统控制策略以及水下环境实时通信六个方面阐述了系统参数校正和能效优化方法,为解决海洋环境下的无线电能传输现存问题提供了有效的解决思路。在文章最后,总结了现阶段水下无线电能传输技术亟待解决的问题并探讨了技术的未来发展趋势和研究重点,为水下无线电能传输技术从原理样机到工程产品的发展提供了新的研究思路,为行业技术标准的制定提供了方向参考。
随着无人潜航器从传统燃料电池向锂电池的转变,水下无线电能传输作为一种新型的自主能源充电方式,将进一步提高无人水下设备的机动性和续航能力。水下无线电能传输技术的发展将成为进一步探索海洋的推进器,并将成为未来海洋能源网络布局中的重要环节,推进未来海洋能源网、观测网、信息网络建设和陆-海-空-天互联互通。
参考文献
[1] 吴旭升, 孙盼, 杨深钦, 等. 水下无线电能传输技术及应用研究综述[J]. 电工技术学报, 2019, 34(8): 1559-1568.
Wu Xusheng, Sun Pan, Yang Shenqin, et al. Review on underwater wireless power transfer technology and its application[J]. Transactions of China Electro-technical Society, 2019, 34(8): 1559-1568.
[2] 李加林, 沈满洪, 马仁锋, 等. 海洋生态文明建设背景下的海洋资源经济与海洋战略[J]. 自然资源学报, 2022, 37(4): 829-849.
Li Jialin, Shen Manhong, Ma Renfeng, et al. Marine resource economy and strategy under the background of marine ecological civilization construction[J]. Journal of Natural Resources, 2022, 37(4): 829-849.
[3] Jung H, Subban C V, McTigue J D, et al. Extracting energy from ocean thermal and salinity gradients to power unmanned underwater vehicles: state of the art, current limitations, and future outlook[J]. Renewable and Sustainable Energy Reviews, 2022, 160: 112283.
[4] Atyabi A, MahmoudZadeh S, Nefti-Meziani S. Current advancements on autonomous mission planning and management systems: an AUV and UAV perspective[J]. Annual Reviews in Control, 2018, 46: 196-215.
[5] 贾宇. 关于海洋强国战略的思考[J]. 太平洋学报, 2018, 26(1): 1-8.
Jia Yu. On China’s maritime power strategy[J]. Pacific Journal, 2018, 26(1): 1-8.
[6] Bagchi A C. Emerging works on wireless inductive power transfer: AUV charging from constant current distribution and analysis of controls in EV dynamic charging[D]. Logan: Utah State University, 2020.
[7] Wynn R B, Huvenne V A I, Le Bas T P, et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience[J]. Marine Geology, 2014, 352: 451-468.
[8] Yanyan Z. The concept and technology development of autonomous underwater vehicle technology—taking “Bluefin-21” as an example[J]. China Terminology, 2014, 16(S1): 131.
[9] Bluefin 1.5 kWh subsea battery[EB/OL]. [2023-12-10]. https://gdmissionsystems.com/products/underwater-vehicles/bluefin-robotics/1-5-kwh-subsea-battery.
[10] Chen Jingxin, Li Yang, Zhang Xuen, et al. Simulation and design of solar power system for ocean buoy[J]. Journal of Physics: Conference Series, 2018, 1061: 012018.
[11] Arima M, Okashima T, Yamada T. Development of a solar-powered underwater glider[C]//2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 2011: 1-5.
[12] Stokey R, Allen B, Austin T, et al. Enabling technologies for REMUS docking: an integral component of an autonomous ocean-sampling network [J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 487-497.
[13] Guida R, Demirors E, Dave N, et al. Underwater ultrasonic wireless power transfer: a battery-less platform for the Internet of underwater things[J]. IEEE Transactions on Mobile Computing, 2022, 21(5): 1861-1873.
[14] Jin Ke, Zhou Weiyang. Wireless laser power transmission: a review of recent progress[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3842-3859.
[15] Wang De’an, Zhang Jiantao, Cui Shumei, et al. The state-of-the-arts of underwater wireless power transfer: a comprehensive review and new perspectives[J]. Renewable and Sustainable Energy Reviews, 2024, 189: 113910.
[16] Wang De’an, Chen Fuze, Zhang Jiantao, et al. A novel pendulum-type magnetic coupler with high misalignment tolerance for AUV underwater wireless power transfer systems[J]. IEEE Transactions on Power Electronics, 2023, 38(12): 14861-14871.
[17] Orekan T, Zhang Peng. Underwater Wireless Power Transfer: Smart Ocean Energy Converters[M]. Berlin: ChamSpringer International Publishing, 2019.
[18] Zhang Ben, Xu Wanli, Lu Changbo, et al. Review of low-loss wireless power transfer methods for autonomous underwater vehicles[J]. IET Power Electronics, 2022, 15(9): 775-788.
[19] Niu Songyan, Xu Haiqi, Sun Zhirui, et al. The state-of-the-arts of wireless electric vehicle charging via magnetic resonance: principles, standards and core technologies[J]. Renewable and Sustainable Energy Reviews, 2019, 114: 109302.
[20] 范兴明, 莫小勇, 张鑫. 无线电能传输技术的研究现状与应用[J]. 中国电机工程学报, 2015, 35(10): 2584-2600.
Fan Xingming, Mo Xiaoyong, Zhang Xin. Research status and application of wireless power transmission technology[J]. Proceedings of the CSEE, 2015, 35(10): 2584-2600.
[21] 闫争超, 胡谦宇, 赵晨旭, 等. 水下航行器感应式无线电能传输技术研究综述[J]. 中国电机工程学报, 2023, 43(24): 9668-9682.
Yan Zhengchao, Hu Qianyu, Zhao Chenxu, et al. Review on inductive wireless power transfer technology for underwater vehicles[J]. Proceedings of the CSEE, 2023, 43(24): 9668-9682.
[22] 杨庆新, 张献, 章鹏程. 电动车智慧无线电能传输云网[J]. 电工技术学报, 2023, 38(1): 1-12.
Yang Qingxin, Zhang Xian, Zhang Pengcheng. Intelligent wireless power transmission cloud network for electric vehicles[J]. Transactions of China Electrotechnical Society, 2023, 38(1): 1-12.
[23] 薛明, 杨庆新, 章鹏程, 等. 无线电能传输技术应用研究现状与关键问题[J]. 电工技术学报, 2021, 36(8): 1547-1568.
Xue Ming, Yang Qingxin, Zhang Pengcheng, et al. Application status and key issues of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1547-1568.
[24] 丰利军, 朱春波, 张剑韬, 等. 水下无人航行器水下无线充电关键技术研究[J]. 舰船科学技术, 2020, 42(23): 159-162.
Feng Lijun, Zhu Chunbo, Zhang Jiantao, et al. Research on key technology based on wireless charging technology for unmanned underwate vehicle[J]. Ship Science and Technology, 2020, 42(23): 159-162.
[25] 顾文超, 丘东元, 张波, 等. 水下无线输电技术研究综述[J]. 电源学报, 2023, 21(3): 125-138.
Gu Wenchao, Qiu Dongyuan, Zhang Bo, et al. Review of underwater wireless power transfer technologies[J]. Journal of Power Supply, 2023, 21(3): 125-138.
[26] Teeneti C R, Truscott T T, Beal D N, et al. Review of wireless charging systems for autonomous underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 2021, 46(1): 68-87.
[27] Wang Zhulin, Zhang Yiming, He Xinghong, et al. Research and application of capacitive power transfer system: a review[J]. Electronics, 2022, 11(7): 1158.
[28] 文海兵, 宋保维, 张克涵, 等. 水下磁耦合谐振无线电能传输技术及应用研究综述[J]. 水下无人系统学报, 2019, 27(4): 361-368.
Wen Haibing, Song Baowei, Zhang Kehan, et al. Underwater magnetically-coupled resonant wireless power transfer technology and its applications: a review[J]. Journal of Unmanned Undersea Systems, 2019, 27(4): 361-368.
[29] Dionigi M, Constanzo A, Mastri F, et al. Recent Advances on Magnetic Resonant Wireless Power Transfer, Chapter 6[M]//Wireless Power Transfer. 2nd ed. Denmark: River Publishers, 2016: 217-270.
[30] Rim C T, Mi C. Wireless Power Transfer for Electric Vehicles and Mobile Devices[M]. Newyork: John Wiley & Sons, 2017.
[31] Lin Mingwei, Yang Canjun. AUV docking method in a confined reservoir with good visibility[J]. Journal of Intelligent & Robotic Systems, 2020, 100(1): 349-361.
[32] Feezor M D, Yates Sorrell F, Blankinship P R. An interface system for autonomous undersea vehicles[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 522-525.
[33] Kojiya T, Sato F, Matsuki H, et al. Construction of non-contacting power feeding system to underwater vehicle utilizing electro magnetic induction[C]// Europe Oceans, Brest, France, 2005: 709-712.
[34] Li Zesong, Li Dejun, Lin Lin, et al. Design considerations for electromagnetic couplers in contactless power transmission systems for deep-sea applications[J]. Journal of Zhejiang University SCIENCE C, 2010, 11(10): 824-834.
[35] Baer C M, Alten M, Bixler G, et al. Non-contact wet mateable connector[C]//OCEANS 2013, San Diego, USA, 2013: 1-4.
[36] Wang Siling, Song Baowei, Duan Guilin, et al. Automatic wireless power supply system to autonomous underwater vehicles by means of electromagnetic coupler[J]. Journal of Shanghai Jiao Tong University (Science), 2014, 19(1): 110-114.
[37] Seatooth connect—wireless connector[EB/OL]. [2023-12-10]. http://www.wfs-tech.com/wp-content/uploads/ 2015/06/SeatoothConnect-15-1.0.pdf
[38] Cheng Zhiyuan, Lei Yang, Song Kai, et al. Design and loss analysis of loosely coupled transformer for an underwater high-power inductive power transfer system[J]. IEEE Transactions on Magnetics, 2015, 51(7): 8401110.
[39] Yan Zhengchao, Zhang Kehan, Wen Haibing, et al. Research on characteristics of contactless power transmission device for autonomous underwater vehicle[C]//OCEANS 2016 - Shanghai, Shanghai, China, 2016: 1-5.
[40] Kan Tianze, Mai Ruikun, Mercier P P, et al. Design and analysis of a three-phase wireless charging system for lightweight autonomous underwater vehicles[J]. IEEE Transactions on Power Electronics, 2018, 33(8): 6622-6632.
[41] Cai Chunwei, Qin Mu, Wu Shuai, et al. A strong misalignmentt tolerance magnetic coupler for autonomous underwater vehicle wireless power transfer system[C]//2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 2018: 1-5.
[42] Hasaba R, Okamoto K, Yagi T, et al. High efficient wireless power transfer system for AUV with multiple coils and ferrite under sea[C]//2019 IEEE Wireless Power Transfer Conference (WPTC), London, UK, 2019: 343-346.
[43] Rosu G, Marinescu A, Samoilescu G, et al. The efficiency of an underwater inductive charging system for AUVs based on truncated coils[C]//2019 6th International Symposium on Electrical and Electronics Engineering (ISEEE), Galati, Romania, 2019: 1-6.
[44] Duarte C, Gonçalves F, Silva M, et al. Experimental evaluation of coupling coils for underwater wireless power transfer[C]//2019 IEEE Wireless Power Transfer Conference (WPTC), London, UK, 2019: 557-560.
[45] Yan Zhengchao, Song Baowei, Zhang Yiming, et al. A rotation-free wireless power transfer system with stable output power and efficiency for autonomous underwater vehicles[J]. IEEE Transactions on Power Electronics, 2019, 34(5): 4005-4008.
[46] Yan Zhengchao, Zhang Yiming, Zhang Kehan, et al. Underwater wireless power transfer system with a curly coil structure for AUVs[J]. IET Power Electronics, 2019, 12(10): 2559-2565.
[47] Guo Kan, Zhou Jing, Sun Hui, et al. Design considerations for a position-adaptive contactless underwater power deliver system[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-6.
[48] Cai Chunwei, Zhang Yanyu, Wu Shuai, et al. A circumferential coupled dipole-coil magnetic coupler for autonomous underwater vehicles wireless charging applications[J]. IEEE Access, 2020, 8: 65432-65442.
[49] 刘润鹏, 杨金明. 一种改进线圈结构的AUV无线充电系统[J]. 水下无人系统学报, 2020, 28(3): 323-329.
Liu Runpeng, Yang Jinming. AUV wireless charging system with improved coil structure[J]. Journal of Unmanned Undersea Systems, 2020, 28(3): 323-329.
[50] Zhou Jing, Yao Pengzhi, Chen Yanqing, et al. Design considerations for a self-latching coupling structure of inductive power transfer for autonomous underwater vehicle[J]. IEEE Transactions on Industry Applications, 2021, 57(1): 580-587.
[51] Cai Chunwei, Wu Shuai, Zhang Zhipeng, et al. Development of a fit-to-surface and lightweight magnetic coupler for autonomous underwater vehicle wireless charging systems[J]. IEEE Transactions on Power Electronics, 2021, 36(9): 9927-9940.
[52] Wu Shuai, Cai Chunwei, Chai Wenping, et al. Uniform power IPT system with quadruple-coil transmitter and crossed dipole receiver for autonomous underwater vehicles[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 1289-1297.
[53] Wang De’an, Cui Shumei, Zhang Jiantao, et al. A novel arc-shaped lightweight magnetic coupler for AUV wireless power transfer[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 1315-1329.
[54] Wen Haibing, Li Jiayuan, Yang Lei, et al. Feasibility study on wireless power transfer for AUV with novel pressure-resistant ceramic materials[C]//2022 International Power Electronics Conference (IPEC-Himeji 2022- ECCE Asia), Himeji, Japan, 2022: 182-185.
[55] Wu Shuai, Cai Chunwei, Wang Aobo, et al. Design and implementation of a uniform power and stable efficiency wireless charging system for autonomous underwater vehicles[J]. IEEE Transactions on Industrial Electronics, 2023, 70(6): 5674-5684.
[56] Yan Zhengchao, Zhang Kehan, Qiao Lin, et al. A multiload wireless power transfer system with concentrated magnetic field for AUV cluster system[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 1307-1314.
[57] Yang Lei, Huang Jingjing, Feng Baoxiang, et al. Undersea wireless power and data transfer system with shared channel powered by marine renewable energy system[J]. IEEE Journal on Emerging and Selected Topics in Circuits and Systems, 2022, 12(1): 242-250.
[58] Wang Yijie, Li Tao, Zeng Ming, et al. An underwater simultaneous wireless power and data transfer system for AUV with high-rate full-duplex communication[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 619-633.
[59] Zeng Yingqin, Lu Conghui, Liu Renzhe, et al. Wireless power and data transfer system using multidirectional magnetic coupler for swarm AUVs[J]. IEEE Transactions on Power Electronics, 2023, 38(2): 1440-1444.
[60] Zhang Ben, Chen Jinmao, Wang Xudong, et al. High-power-density wireless power transfer system for autonomous underwater vehicle based on a variable ring-shaped magnetic coupler[J]. IEEE Transactions on Transportation Electrification, 2024, 10(2): 3061-3074.
[61] Zhou Jing, Guo Kan, Chen Zhonghua, et al. Design considerations for contact-less underwater power delivery: a systematic review and critical analysis[J]. Wireless Power Transfer, 2020, 7(1): 76-85.
[62] Jenkins A, Bana V, Anderson G. Impedance of a coil in seawater[C]//2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 2014: 625-626.
[63] 张克涵, 阎龙斌, 闫争超, 等. 基于磁共振的水下非接触式电能传输系统建模与损耗分析[J]. 物理学报, 2016, 65(4): 334-342.
Zhang Kehan, Yan Longbin, Yan Zhengchao, et al. Modeling and analysis of eddy-current loss of underwater contact-less power transmission system based on magnetic coupled resonance[J]. Acta Physica Sinica, 2016, 65(4): 334-342.
[64] Yan Zhengchao, Zhang Yiming, Kan Tianze, et al. Frequency optimization of a loosely coupled underwater wireless power transfer system considering eddy current loss[J]. IEEE Transactions on Industrial Electronics, 2019, 66(5): 3468-3476.
[65] Kim J, Kim K, Kim H, et al. An efficient modeling for underwater wireless power transfer using Z-parameters[J]. IEEE Transactions on Electromagnetic Compatibility, 2019, 61(6): 2006-2014.
[66] 李泽松. 基于电磁感应原理的水下非接触式电能传输技术研究[D]. 杭州: 浙江大学, 2010.
Li Zesong. Research on underwater contactless power transmission technology based on electromagnetic induction principle[D]. Hangzhou: Zhejiang University, 2010.
[67] Zhou Jie, Li Dejun, Chen Ying. Frequency selection of an inductive contactless power transmission system for ocean observing[J]. Ocean Engineering, 2013, 60: 175-185.
[68] Lin Mingwei, Li Dejun, Yang Canjun. Design of an ICPT system for battery charging applied to underwater docking systems[J]. Ocean Engineering, 2017, 145: 373-381.
[69] Zhang Kehan, Zhang Xinyi, Zhu Zhengbiao, et al. A new coil structure to reduce eddy current loss of WPT systems for underwater vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 245-253.
[70] Zhang Kehan, Ma Yunshan, Yan Zhengchao, et al. Eddy current loss and detuning effect of seawater on wireless power transfer[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(1): 909-917.
[71] Zhang Kehan, Dai Fan, Li Xinyang, et al. Analysis of power transfer characteristics of IPT system with near field magnetic coupling[J]. IEEE Transactions on Electromagnetic Compatibility, 2023, 65(3): 890-899.
[72] Zhang Xueyi, Quan Changhui, Li Zhongqi. Mutual inductance calculation of circular coils for an arbitrary position with electromagnetic shielding in wireless power transfer systems[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1196-1204.
[73] Yi Jiliang, Yang Peng, Li Zhongqi, et al. Mutual inductance calculation of circular coils for an arbitrary position with a finite magnetic core in wireless power transfer systems[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 1950-1959.
[74] 李中启, 林志远, 杨鹏, 等. 无线电能传输系统带双层有界磁屏蔽任意位置圆形线圈的耦合系数计算[J]. 电工技术学报, 2022, 37(24): 6306-6318.
Li Zhongqi, Lin Zhiyuan, Yang Peng, et al. Calculation of the coupling coefficient of an arbitrarily positioned circular coil for wireless power transfer system with a double-layered finite magnetic shield[J]. Transactions of China Electrotechnical Society, 2022, 37(24): 6306-6318.
[75] Vittal D P, Arunachalam U, Narayanaswamy V, et al. Analysis of subsea inductive power transfer performances using planar coils[J]. Marine Technology Society Journal, 2016, 50(1): 17-26.
[76] 于乐. 面向水下应用的无线能量传输系统关键技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.
Yu Le. Research on key technologies of wireless energy transmission system for underwater applications [D]. Harbin: Harbin Engineering University, 2016.
[77] Loaec J, Globus A, Le Floc’h M, et al. Effect of hydrostatic pressure on the magnetization mechanisms in Ni-Zn ferrite[J]. IEEE Transactions on Magnetics, 1975, 11(5): 1320-1322.
[78] Loaec J, Le Floc’h M, Johannin P. Effect of the hydrostatic pressure on the susceptibility frequency spectrum of polycrystalline Mn-Zn and Ni-Zn ferrites[J]. IEEE Transactions on Magnetics, 1978, 14(5): 915-917.
[79] Zhang N, Wang Z L, Fang X. Piezoimpedane and pressure sensors with NiZn ferrite device[J]. Sensors and Actuators A: Physical, 2008, 147(2): 504-507.
[80] Zeng Hao, Liu Zhizhen, Hou Yanjin, et al. Optimization of magnetic core structure for wireless charging coupler[J]. IEEE Transactions on Magnetics, 2017, 53(6): 8000804.
[81] Kojiya T, Sato F, Matsuki H, et al. Automatic power supply system to underwater vehicles utilizing non-contacting technology[C]//Oceans '04 MTS/IEEE Techno-Ocean '04, Kobe, Japan, 2004: 2341-2345.
[82] Zhou Jing, Guo Kan, Chen Zhonghua, et al. Design considerations for contact-less underwater power delivery: a systematic review and critical analysis[J]. Wireless Power Transfer, 2020, 7(1): 76-85.
[83] Anderson G, Bana V, Kerber M, et al. Marine fouling and thermal dissipation of undersea wireless power transfer[R/OL]. 2014. https://api.semanticscholar.org/ CorpusID:107205341.
[84] Oiler J, Anderson G, Bana V, et al. Thermal and biofouling effects on underwater wireless power transfer[C]//2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 2015: 1-4.
[85] Mohsan S A H, Islam A, Ali M, et al. A review on research challenges, limitations and practical solutions for underwater wireless power transfer[J]. International Journal of Advanced Computer Science and Applications, 2020, 11(8): 554-562.
[86] 苏玉刚, 侯信宇, 戴欣. 磁耦合无线电能传输系统异物检测技术综述[J]. 中国电机工程学报, 2021, 41(2): 715-728.
Su Yugang, Hou Xinyu, Dai Xin. Review of foreign object detection technology in magnetic coupling wireless power transfer system[J]. Proceedings of the CSEE, 2021, 41(2): 715-728.
[87] Bana V, Anderson G, Xu L, et al. Characterization of coupled coil in seawater for wireless power transfer[C]//SPAWAR Technical Report, San Diego, CA, 2013: 2026.
[88] Bana V, Kerber M, Anderson G, et al. Underwater wireless power transfer for maritime applications[C]// 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 2015: 1-4.
[89] Askari A, Stark R, Curran J, et al. Underwater wireless power transfer[C]//2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 2015: 1-4.
[90] Ogihara M, Ebihara T, Mizutani K, et al. Wireless power and data transfer system for station-based autonomous underwater vehicles[C]//OCEANS 2015 - MTS/IEEE Washington, Washington, DC, USA, 2015: 1-5.
[91] Pessoa L M, Pereira M R, Santos H M, et al. Simulation and experimental evaluation of a resonant magnetic wireless power transfer system for seawater operation[C]//OCEANS 2016, Shanghai, China, 2016: 1-5.
[92] Wang De’an, Gao Yifan, Zhang Jiantao, et al. Research on energy and efficiency drop issue of underwater wireless power transfer systems[C]//2024 IEEE 7th International Electrical and Energy Conference (CIEEC), Harbin, China, 2024: 1654-1659.
[93] Ressurreição T, Gonçalves F, Duarte C, et al. System design for wireless powering of AUVs[C]//OCEANS 2017 - Aberdeen, Aberdeen, UK, 2017: 1-6.
[94] Yan Zhengchao, Song Baowei, Zhang Kehan, et al. Eddy current loss analysis of underwater wireless power transfer systems with misalignments[J]. AIP Advances, 2018, 8(10): 101421.
[95] Orekan T, Zhang Peng, Shih C. Analysis, design, and maximum power-efficiency tracking for undersea wireless power transfer[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2018, 6(2): 843-854.
[96] 焦超群, 杨旭, 杨俊峰, 等. 基于多目标优化理论的耦合无关恒压输出型LCC/S补偿感应电能传输系统[J]. 电工技术学报, 2023, 38(24): 6565-6580.
Jiao Chaoqun, Yang Xu, Yang Junfeng, et al. Coupling-independent constant-voltage output LCC/S compensation inductive power transfer system based on multi-objective optimization theory[J]. Transactions of China Electrotechnical Society, 2023, 38(24): 6565-6580.
[97] 刘宇鑫, 高飞, 刘鑫, 等. 深海无人航行器双向无线充电系统的涡流损耗分析与效率优化[J]. 电工技术学报, 2024, 39(18): 5599-5609.
Liu Yuxin, Gao Fei, Liu Xin, et al. Analysis of eddy current loss and efficiency optimization for bidirectional underwater wireless power transfer of AUVs[J]. Transactions of China Electrotechnical Society, 2024, 39(18): 5599-5609.
[98] Sun Pan, Wu Xusheng, Cai Jin, et al. Eddy current loss analysis and frequency optimization design of double-sided LCC-IPT system in seawater environment[J]. Science China Technological Sciences, 2022, 65(2): 407-418.
[99] Liu Zhimeng, Li Fang, Tao Chengxuan, et al. Design of wireless power transfer system for autonomous underwater vehicles considering seawater eddy current loss[J]. Microsystem Technologies, 2021, 27(10): 3783-3792.
[100] Feng Jing, Wei Guo, Zhang Jiantao, et al. An LCCC-LCC compensated dual-coupled WPT system with MI enhancement and high misalignment tolerance[J]. IEEE Transactions on Power Electronics, 2023, 38(12): 15162-15167.
[101] Mai Jianwei, Wang Yijie, Yao Yousu, et al. Analysis and design of high-misalignment-tolerant compensation topologies with constant-current or constant-voltage output for IPT systems[J]. IEEE Transactions on Power Electronics, 2021, 36(3): 2685-2695.
[102] 王懿杰, 孙熙来, 麦建伟, 等. 电磁感应式无线电能传输系统变参数条件下补偿网络研究综述[J]. 中国电机工程学报, 2022, 42(20): 7288-7306.
Wang Yijie, Sun Xilai, Mai Jianwei, et al. Review of research on compensation topologies for inductively coupled power transfer systems under variable parameters conditions[J]. Proceedings of the CSEE, 2022, 42(20): 7288-7306.
[103] Wu Min, Yang Xu, Chen Wenjie, et al. A compact coupler with integrated multiple decoupled coils for wireless power transfer system and its anti-misalignment control[J]. IEEE Transactions on Power Electronics, 2022, 37(10): 12814-12827.
[104] Pang Hongliang, Chau K T, Han Wei, et al. Decoupled-double D coils based dual-resonating-frequency compensation topology for wireless power transfer[J]. IEEE Transactions on Magnetics, 2022, 58(2): 8000407.
[105] Wang Tianlei, Zhao Qichao, Yang Canjun. Visual navigation and docking for a planar type AUV docking and charging system[J]. Ocean Engineering, 2021, 224: 108744.
[106] Lu Fei, Zhang Hua, Hofmann H, et al. A dual-coupled LCC-compensated IPT system with a compact magnetic coupler[J]. IEEE Transactions on Power Electronics, 2018, 33(7): 6391-6402.
[107] Zhang Ben, Jiang Chaoqiang, Yang Fengshuo, et al. An antirotation wireless power transfer system with a flexible magnetic coupler for autonomous underwater vehicles[J]. IEEE Transactions on Power Electronics, 2025, 40(1): 2593-2603.
[108] Wang De’an, Gao Zhan, Chen Fuze, et al. Wide anti-misalignment tolerance WPT system with uniform magnetic field coupler for autonomous underwater vehicles[J/OL]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2024. doi: 10.1109/JESTPE.2024.3454089.
[109] Li Tao, Sun Zhan, Wang Yijie, et al. Simultaneous wireless power and data transfer system with full-duplex MIMO communication channels for underwater applications[J]. IEEE Transactions on Industrial Informatics, 2024, 20(4): 6382-6393.
[110] Wang N X, Wang Hanwei, Mei Jie, et al. Robust 3-D wireless power transfer system based on rotating fields for multi-user charging[J]. IEEE Transactions on Energy Conversion, 2021, 36(2): 693-702.
[111] 张献, 韩大稳, 沙琳, 等. 一种共享磁通多耦合模式的无线电能传输系统抗偏移方法[J]. 电工技术学报, 2022, 37(21): 5359-5368.
Zhang Xian, Han Dawen, Sha Lin, et al. An anti-offset method under flux-sharing multi-coupling mode for wireless power transmission system[J]. Transactions of China Electrotechnical Society, 2022, 37(21): 5359-5368.
[112] 金卓航, 武晋德, 韩晓霞, 等. 无线电能传输系统中零相角频率跟踪策略研究[J]. 中国电机工程学报, 2025, 45(2): 725-736.
Jin Zhuohang, Wu Jinde, Han Xiaoxia, et al. Study of zero-phase angle frequency tracking strategy in wireless power transfer system[J]. Proceedings of the CSEE, 2025, 45(2): 725-736.
[113] 黄程, 陆益民. 磁谐振无线电能传输系统的频率跟踪失谐控制[J]. 电工技术学报, 2019, 34(15): 3102-3111.
Huang Cheng, Lu Yimin. Frequency tracking detuning control of magnetic resonant wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2019, 34(15): 3102-3111.
[114] 刘帼巾, 李义鑫, 崔玉龙, 等. 基于FPGA的磁耦合谐振式无线电能传输频率跟踪控制[J]. 电工技术学报, 2018, 33(14): 3185-3193.
Liu Guojin, Li Yixin, Cui Yulong, et al. Frequency tracking control of wireless power transfer via magnetic resonance coupling based on FPGA[J]. Transactions of China Electrotechnical Society, 2018, 33(14): 3185-3193.
[115] Li Hong, Jiang Zhiyuan. On automatic resonant frequency tracking in LLC series resonant converter based on zero-current duration time of secondary diode[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 4956-4962.
[116] Li Weihan, Wei Guo, Cui Chao, et al. A double-side self-tuning LCC/S system using a variable switched capacitor based on parameter recognition[J]. IEEE Transactions on Industrial Electronics, 2021, 68(4): 3069-3078.
[117] Song Kai, Lan Yu, Wei Ruizhi, et al. A control strategy for wireless EV charging system to improve weak coupling output based on variable inductor and capacitor[J]. IEEE Transactions on Power Electronics, 2022, 37(10): 12853-12864.
[118] Li Jia, Zhu Chong, Xie Jixie, et al. Design and implementation of high-misalignment tolerance WPT system for underwater vehicles based on a variable inductor[J]. IEEE Transactions on Power Electronics, 2023, 38(10): 11726-11737.
[119] Kavimandan U D, Mahajan S M, Van Neste C W. Analysis and demonstration of a dynamic ZVS angle control using a tuning capacitor in a wireless power transfer system[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(2): 1876-1890.
[120] Chen Shuxin, Li Hongchang, Tang Yi. Extending the operating region of inductive power transfer systems through dual-side cooperative control[J]. IEEE Transactions on Industrial Electronics, 2020, 67(11): 9302-9312.
[121] Li Yanling, Du Hao, He Zhengyou, et al. Robust control for the IPT system with parametric uncertainty using LMI pole constraints[J]. IEEE Transactions on Power Electronics, 2020, 35(1): 1022-1035.
[122] Gati E, Kampitsis G, Manias S. Variable frequency controller for inductive power transfer in dynamic conditions[J]. IEEE Transactions on Power Electronics, 2017, 32(2): 1684-1696.
[123] Zhang Zhen, Shen Shen, Liang Zhenyan, et al. Dynamic-balancing robust current control for wireless drone-in-flight charging[J]. IEEE Transactions on Power Electronics, 2022, 37(3): 3626-3635.
[124] Liu Yeran, Madawala U K, Mai Ruikun, et al. An optimal multivariable control strategy for inductive power transfer systems to improve efficiency[J]. IEEE Transactions on Power Electronics, 2020, 35(9): 8998-9010.
[125] Xia Chenyang, Wang Wei, Ren Siyuan, et al. Robust control for inductively coupled power transfer systems with coil misalignment[J]. IEEE Transactions on Power Electronics, 2018, 33(9): 8110-8122.
[126] Li Zhenjie, Liu Hao, Tian Yuhong, et al. Constant current/voltage charging for primary-side controlled wireless charging system without using dual-side communication[J]. IEEE Transactions on Power Electronics, 2021, 36(12): 13562-13577.
[127] 赵进国, 赵晋斌, 张俊伟, 等. 无线电能传输系统中有源阻抗匹配网络断续电流模式最大效率跟踪研究[J]. 电工技术学报, 2022, 37(1): 24-35.
Zhao Jinguo, Zhao Jinbin, Zhang Junwei, et al. Maximum efficiency tracking study of active impedance matching network discontinous current mode in wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2022, 37(1): 24-35.
[128] Zhang Zhen, Yu Wenfeng. Communication/model-free constant current control for wireless power transfer under disturbances of coupling effect[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4587-4595.
[129] 罗成鑫, 丘东元, 张波, 等. 多负载无线电能传输系统[J]. 电工技术学报, 2020, 35(12): 2499-2516.
Luo Chengxin, Qiu Dongyuan, Zhang Bo, et al. Wireless power transfer system for multiple loads[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2499-2516.
[130] Maki T, Sato Y, Matsuda T, et al. Docking method for hovering-type AUVs based on acoustic and optical landmarks[J]. Journal of Robotics and Mechatronics, 2018, 30(1): 55-64.
[131] Eren F, Pe’eri S, Thein M W, et al. Position, orientation and velocity detection of unmanned underwater vehicles (UUVs) using an optical detector array[J]. Sensors, 2017, 17(8): 1741.
[132] 程志远, 张智超, 眭清洋, 等. 基于无迹卡尔曼滤波水下WPT系统副边关键参数在线辨识[J]. 中国电机工程学报, 2024, 44(11): 4470-4480.
Cheng Zhiyuan, Zhang Zhichao, Sui Qingyang, et al. Online identification of key parameters of secondary edges in underwater WPT system based on unscented Kalman filtering algorithm[J]. Proceedings of the CSEE, 2024, 44(11): 4470-4480.
[133] Chen Kaiwen, Ouyang Yuzhao, Yang Xiaodong, et al. A high-interoperability optimal frequency control method for the AGV dynamic wireless charging systems without communication[J]. IEEE Transactions on Power Electronics, 2024, 39(3): 3797-3808.
[134] Wang Lei, Sun Pan, Liang Yan, et al. Research on the control strategy of communication-free IPT system based on multiparameter joint real-time identification [J]. IEEE Transactions on Power Electronics, 2024, 39(1): 1912-1926.
[135] Li Tao, Sun Zhichao, Wang Yijie, et al. Undersea simultaneous wireless power and data transfer system with extended communication distance and high rate[J]. IEEE Transactions on Power Electronics, 2024, 39(3): 2917-2921.
[136] Li Tao, Sun Zhichao, Wang Yijie, et al. An underwater simultaneous wireless power and data transfer system with 1-mbps full-duplex communication link[J]. IEEE Transactions on Industrial Informatics, 2024, 20(2): 2620-2631.
[137] 李建国, 张波, 荣超. 近场磁耦合无线电能与信息同步传输技术的发展(上篇): 数字调制[J]. 电工技术学报, 2022, 37(14): 3487-3501.
Li Jianguo, Zhang Bo, Rong Chao. An overview of simultaneous wireless power and information transfer via near-field magnetic links(partⅠ): digital modulation [J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3487-3501.
[138] Yao Yousu, Sun Pengfei, Liu Xiaosheng, et al. Simultaneous wireless power and data transfer: a comprehensive review[J]. IEEE Transactions on Power Electronics, 2022, 37(3): 3650-3667.
[139] McMahon J, Plaku E. Autonomous data collection with timed communication constraints for unmanned underwater vehicles[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1832-1839.
[140] Wang De’an, Zhang Jiantao, Cui Shumei, et al. Modern advances in magnetic materials of wireless power transfer systems: a review and new perspectives [J]. Nanomaterials, 2022, 12(20): 3662.
[141] 窦润田, 张献, 李永建, 等. 磁耦合谐振无线电能传输系统电磁屏蔽应用发展与研究综述[J]. 中国电机工程学报, 2023, 43(15): 6020-6040.
Dou Runtian, Zhang Xian, Li Yongjian, et al. Review of application development and research of electromagnetic shielding in magnetic coupling resonant wireless power transmission system[J]. Proceedings of the CSEE, 2023, 43(15): 6020-6040.
Review of Progress in the Study of Marine Environment Effects on Underwater Wireless Power Transfer Systems
Wang De’an1 Zhang Jiantao1 Zhu Chunbo1 Bie Zhi2 Cui Shumei1
(1. School of Electrical Engineering and Automation Harbin Institute of Technology Harbin 150001 China 2. Zhengzhou Research Institute of Harbin Institute of Technology Zhengzhou 450000 China)
Abstract Countries have been exploring marine resources for the past few decades with the progress and development of ocean science and technology. As the vital carrier for underwater resource exploration and military patrol, unmanned underwater equipment has become a research hotspot in the field of marine engineering, which has a wide range of economic, scientific, and military values.
Typical unmanned underwater equipment mainly includes autonomous underwater vehicles, remotely operated vehicles, autonomous underwater gliders, and submerged buoys. With the progress of technology and the improvement of demand, the problems exposed by traditional energy supply methods have gradually become the biggest weakness restricting its self-sustainability, seriously limiting the autonomy and mobility of UUE. Wireless power transfer technology is gradually becoming a novel type of underwater power supply mode for solving the energy supply issues of underwater equipment. It has incomparable technical advantages over traditional power supply methods and effectively improves charging safety, reliability, convenience, and concealment. The application of underwater wireless power transfer technology can automate the power supply of unmanned underwater equipment, which may almost completely get rid of the need for manual operation.
Since Marin Soljačić from the Massachusetts Institute of Technology first proposed their medium-range wireless power transfer system as a leading role in academia, the wireless power transfer technology has been rapidly developed due to its unique advantages. In recent years, wireless power transfer technology has been widely researched and applied in low-power scenarios such as cell phones, wearable devices, implantable medical, smart home products, and high-power areas such as electric vehicles, unmanned aerial vehicles, and aerospace equipment. These studies were conducted in air medium, while wireless power transfer technology has increasingly been expanded to seawater medium due to advancement and great demand. However, due to the complexity of the marine environment, underwater wireless transmission systems face more challenges than land-based wireless transmission systems represented by electric vehicles. Underwater wireless power transfer technology encounters issues with electromagnetic wave attenuation, irregular seawater current interference, and underwater precision docking as a result of the particular complexity of the marine environment. So far, the underwater wireless energy transfer still has not been fundamentally addressed. With the continuous deepening of research at home and abroad, underwater wireless energy transmission technology has begun to expose some urgent research problems and technical difficulties.
The main contributions of this paper are as follows: (1) A comprehensive overview of the influence of seawater medium on wireless power transmission systems is given, and the influence mechanism and technical research progress of typical influencing factors such as additional eddy current loss, distributed capacitance, deep-sea piezomagnetic effect, and submarine current perturbation in the marine environment and seawater medium are analyzed. (2) Energy efficiency degradation and related problems caused by seawater medium parameters and marine environment are analyzed and discussed in detail. In view of the hot issues such as system detuning in seawater environment, optimal frequency interval seeking, anti-detuning magnetic coupler, valuable research ideas such as system topology pre-compensation design, system frequency dynamic tracking and regulation, and control methods under underwater no-communication or weak-communication conditions are put forward. (3) The potential problems and challenges of wireless power transmission technology applied to underwater unmanned equipment are elaborated, and the future direction of technological development of underwater wireless power transmission systems that deserves attention is envisioned.
Keywords:Underwater wireless power transfer, marine environment, eddy current loss, unmanned underwater vehicle, magnetic coupler
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.240098
国家自然科学基金(52107002)、国家重点研发计划(514010202-302)和国防基础加强计划(JJKJW20200021)资助项目。
收稿日期 2024-01-15
改稿日期 2024-02-22
作者简介
王得安 男,1994年生,博士研究生,研究方向为水下无线电能传输技术。
E-mail:wangdean@hit.edu.cn
崔淑梅 女,1964年生,教授,博士生导师,研究方向为电动汽车电机系统及无线供电技术。
E-mail:cuism@hit.edu.cn(通信作者)
(编辑 赫 蕾)
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (15)
(15)
 (16)
(16)