 、
、 、
、 为各相电感电流,
为各相电感电流, 、
、 、
、 为各相估计电感电流。
为各相估计电感电流。摘要 多相交错并联Buck变换器存在两相或多相功率器件同时发生开路故障(简称“复合开路故障”)的可能,现有基于电感电流观测器的故障诊断方法能识别故障相数,但不易从输出端准确分离出多故障相信息,此外负载不确定性会导致故障误诊和漏诊。为此,该文提出基于未知故障输入观测器的多相Buck变换器功率器件复合开路故障诊断方法。该方法引入未知故障相信息至系统观测器,实现对多故障相特征信息准确分离,同时设计负载自适应参数辨识,准确重构各相电感电流,在变负载工况下实现复合开路故障检测和识别。最后设计了100 W三相交错并联Buck变换器样机,实验结果表明,所提复合开路故障诊断方法能准确地分离各故障相的特征信息,在变负载工况下实现了两个开关周期以内的故障诊断响应速度。
关键词:功率器件 开路故障诊断 未知故障输入观测器 故障相解耦
多相交错并联Buck变换器[1-3]被广泛应用于微电网[4]、电动汽车[5]、数据中心[6]和新能源发电[7]等场景。然而,高强度持续运行使变换器易出现故障,其中功率器件的故障率较高,易导致系统性能劣化或停机,进而产生经济损失和事故影响[8-9]。因此,快速可靠的功率器件故障诊断方法对确保系统安全运行极为重要。
功率器件故障分为短路故障和开路故障两类[10]。短路故障属于瞬态短时行为,通常直接采用硬件保护的外在措施(如快速熔断器)而不做检测处理;开路故障缺乏明显的瞬态特征(如过电压或过电流),通常需要对其进行内在检测,可通过基于信号处理或故障重构的故障诊断方法[11-17]进行有效检测和识别。文献[12]根据电流纹波幅值变化,提出一种在三相交错并联Buck变换器中检测和定位功率器件开路故障的算法,能在开关周期内检测和识别功率器件故障。文献[13]利用半导体开关的非理想特性检测和定位功率器件及二极管故障。文献[14]则通过研究故障状态下的电流信息,提出了一种无需依赖模型和控制参数的故障诊断方法,只需相电流信息,即可实现功率器件故障的诊断。相较于以上方法,文献[18]通过重构系统模型解耦各相变换器,并根据负载电流观测值和输出电压最小化偏差。因此,现有观测器法能准确地获取系统状态信息和负载信息[18-20],是实现多相并联变换器复合开路故障诊断的重要技术手段。
目前,文献[12, 21]研究了基于观测器的故障诊断方法,通过仅采样输出电压实现对多相交错并联Buck变换器开路故障的诊断。但该方法仅讨论了各相电路参数完全相同的情况,然而在实际应用中当各相电路参数存在差异,以及发生功率器件复合开路故障时,输出电压无法准确反映电感电流的变化[22]。此外,故障诊断面临负载不确定变化的负面影响,会出现误诊和漏诊,实际工况中常存在负载参数与其观测器中所设置负载参数观测量失配的情况[23]。为解决这一问题,文献[24]通过设计龙伯格故障观测器增益矩阵来克服负载参数不确定性等因素对状态估计的影响。因此,功率器件发生复合开路故障时,精确辨识实际负载参数是实现故障识别和定位的关键。
为进一步提高诊断的鲁棒性,并增强对复杂工况的适应能力,研究者提出了基于未知故障输入观测器的方法[25-26],其通过构建系统状态方程,并利用残差信号解耦故障影响,实现对系统状态的准确估计。该方法已在电机驱动和直流微电网等领域得到应用,如感应电机的匝间短路故障检测[25]和微电网中的串联电弧故障诊断[26],均展现出良好的故障识别能力。因此,未知故障输入观测器能够准确地提取系统状态信息,从而在保持诊断精度的同时降低系统复杂度,为系统可靠运行提供有力支撑。
综上所述,在多相交错并联Buck变换器中,当某多相功率器件同时发生开路故障时,现有基于输出电压采样的观测器诊断方法面临故障相信息解耦的问题,同时功率突变也会影响诊断结果。针对上述问题,本文以三相交错并联Buck变换器为研究对象,在输出电压采样的基础上增加负载电流传感器,同时引入未知故障输入观测器,用于实现各相电感电流的解耦分离。首先,考虑功率器件故障和负载不确定性,建立了变换器的故障模型;在此基础上,通过设计观测器增益矩阵,根据不同的故障场景准确分离各相电感电流信息;同时,设计负载自适应参数辨识,重构各相电感电流;进一步地,根据重构的各相电感电流观测量进行故障检测和识别;最后,在实验样机上完成验证工作。
三相交错并联Buck变换器的复合开路故障诊断系统框图如图1所示,由三相变换器主电路、控制器、未知故障输入观测器设计环节、故障诊断环节四部分组成。其中,控制采用电压外环与电流内环的双闭环反馈架构,OCF1表示第一相功率器件发生故障,UFIO1表示根据OCF1设计的未知故障输入观测器,OCF12表示第一相和第二相功率器件发生故障,UFIO12表示根据OCF12设计的未知故障输入观测器,其他故障场景和观测器命名以此类推。本文共引入6个观测器,包括3个单开路故障观测器和3个复合开路故障观测器。
图1中,Vin为输入电压,iin为输入电流,vo为输出电压,iload为负载电流,S1、S2、S3为功率器件,d1、d2、d3为占空比,VD1、VD2、VD3为二极管,L1、L2、L3为功率电感,rL1、rL2、rL3为功率电感寄生电阻,Co为输出电容,R为负载,、、为各相电感电流,、、为各相估计电感电流。

图1 三相交错并联Buck变换器的复合开路故障诊断系统框图
Fig.1 The block diagram of a compound open circuit fault diagnostic system for a three-phase interleaved parallel Buck converter
本文使用1个电压传感器和1个电流传感器分别采集了输出电压和负载电流,但负载电流中包含多路电感电流,直接从输出端区分并定位故障相较为复杂,所以同时引入未知故障输入观测器,实现各相电感电流信息的准确分离。
1.1.1 三相交错并联Buck变换器故障模型
本文根据输出电压电流信息,分离出各相电感电流信息,因此变换器模型中观测量为各相电感电流,则系统状态变量x为
 (1)
(1)
同时考虑功率器件故障和负载参数不确定的情况,变换器的状态空间方程和测量方程分别为
 (2)
(2)
 (3)
(3)
式中,xi为状态变量;yi为测量输出;A为系统矩阵;B为输入矩阵;C为输出矩阵;控制输入u为变换器输入电压vin;Ef为功率器件故障分布矩阵;gf为功率器件故障输入矩阵;下标“i、f”为故障场景编号,i, f=1, 2, 3, 12, 13, 23,分别对应3个单开路故障场景和3个复合开路故障场景; 为负载不确定项,q为待辨识负载参数,
为负载不确定项,q为待辨识负载参数, 为回归矩阵,具体形式为
为回归矩阵,具体形式为
 (4)
(4)
1.1.2 未知故障输入观测器结构
根据变换器模型式(2),将负载视作待辨识参数,并通过设计参数自适应律来保证负载参数辨识过程和状态估计过程的收敛性,则负载不确定的未知故障输入观测器具体结构为
 (5)
(5)
 (6)
(6)
式中, 为估计状态变量;
为估计状态变量; 为所提观测器的估计测量输出;zi为未知输入观测器的辅助变量(各相电感电流的开环估计);Fi和Ki均为负载自适应的未知输入观测器增益矩阵;Ti为坐标变换矩阵;Hi为未知故障输入观测器反馈矩阵,定义了测量输出信号的反馈路径;
为所提观测器的估计测量输出;zi为未知输入观测器的辅助变量(各相电感电流的开环估计);Fi和Ki均为负载自适应的未知输入观测器增益矩阵;Ti为坐标变换矩阵;Hi为未知故障输入观测器反馈矩阵,定义了测量输出信号的反馈路径; 为负载参数辨识值;
为负载参数辨识值; 为自适应增益阵。观测器组的结构如图2所示。图中,a为常数,a=10,用于控制负载估计的收敛速率。
为自适应增益阵。观测器组的结构如图2所示。图中,a为常数,a=10,用于控制负载估计的收敛速率。
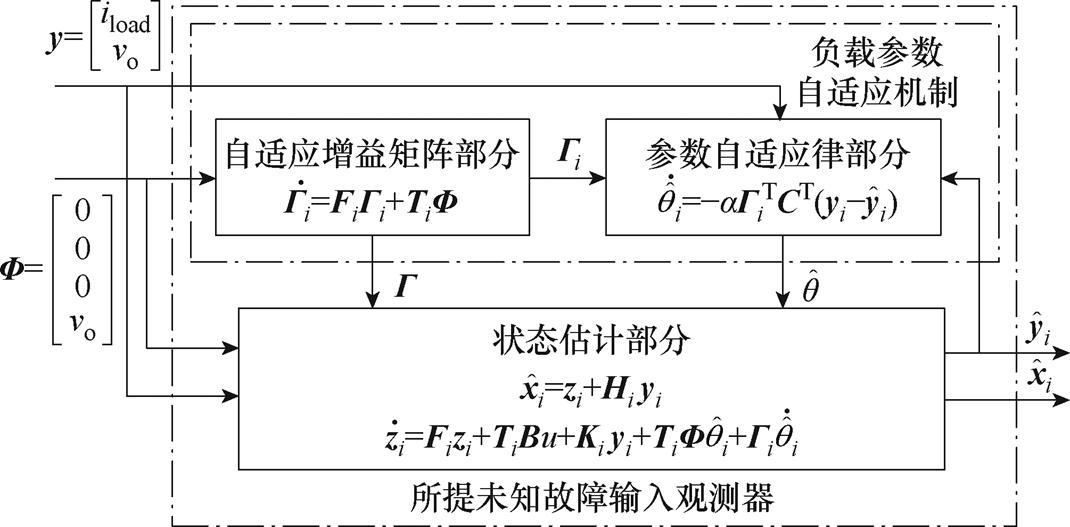
图2 第i个故障场景的未知故障输入观测器结构
Fig.2 The structure of the unknown fault input observer for the ith fault scenario
为保证未知故障输入观测器的存在性,坐标变换矩阵T、增益矩阵F和K需满足设计要求,如图3的设计流程所示,则误差动态方程将在未知故障输入观测器增益矩阵F和自适应增益矩阵 的共同作用下收敛至零,具体证明可参见文献[27]。
的共同作用下收敛至零,具体证明可参见文献[27]。
由于观测器中存在多个矩阵变量,所以需要流程表达多矩阵设计步骤,如图3所示。图3中,K1为观测器增益矩阵,可被任意设计;Rk为测量噪声协方差,其来源为传感器的不准确性,使协方差最小化可减少电压电流采样误差的影响。
复合开路故障诊断环节分为以下两个步骤: ①利用未知故障输入观测器生成负载自适应的残差集作为故障诊断的依据,进行故障检测和识别环节;②基于过零点检测的故障隔离定位故障组合,输出故障诊断结果,如图4所示。
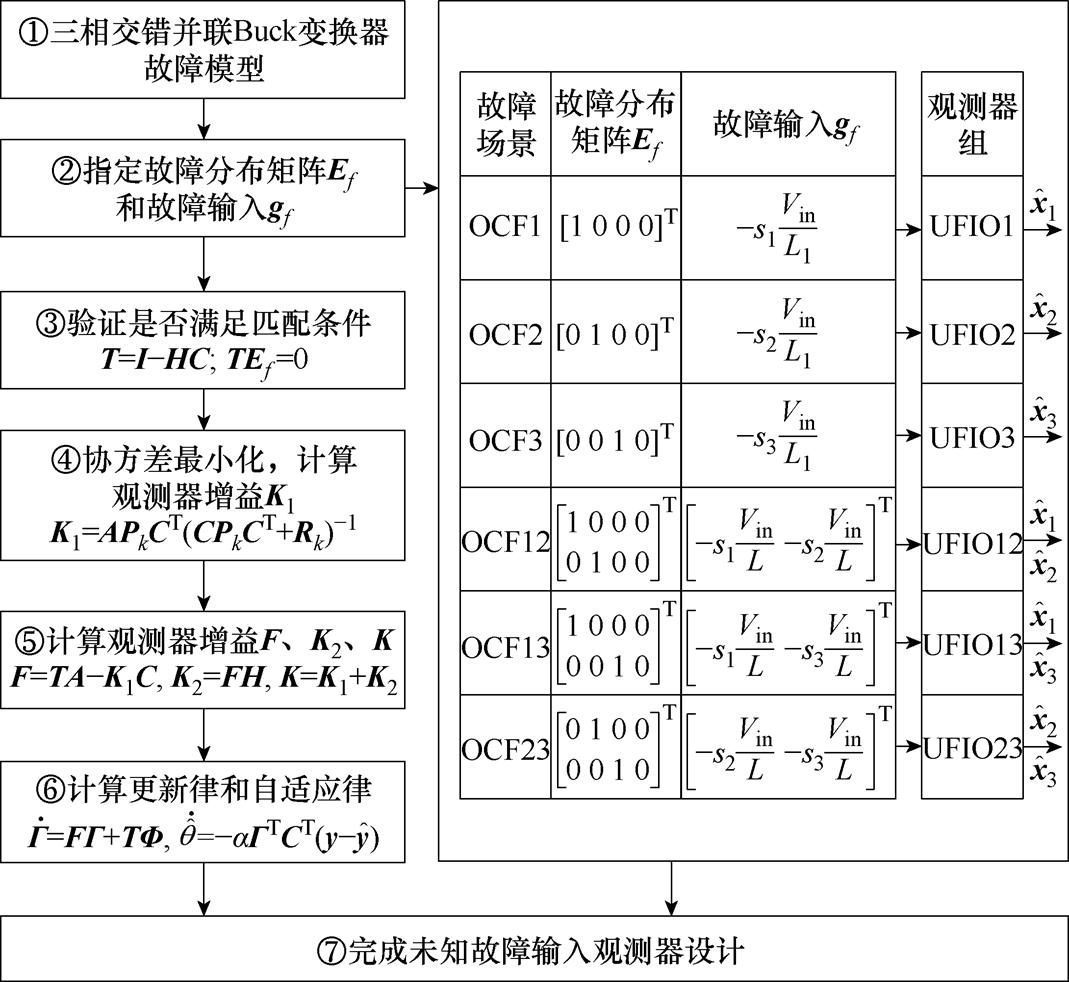
图3 所提未知故障输入观测器矩阵设计流程
Fig.3 The flowchart for the design of the proposed unknown fault input observer matrix
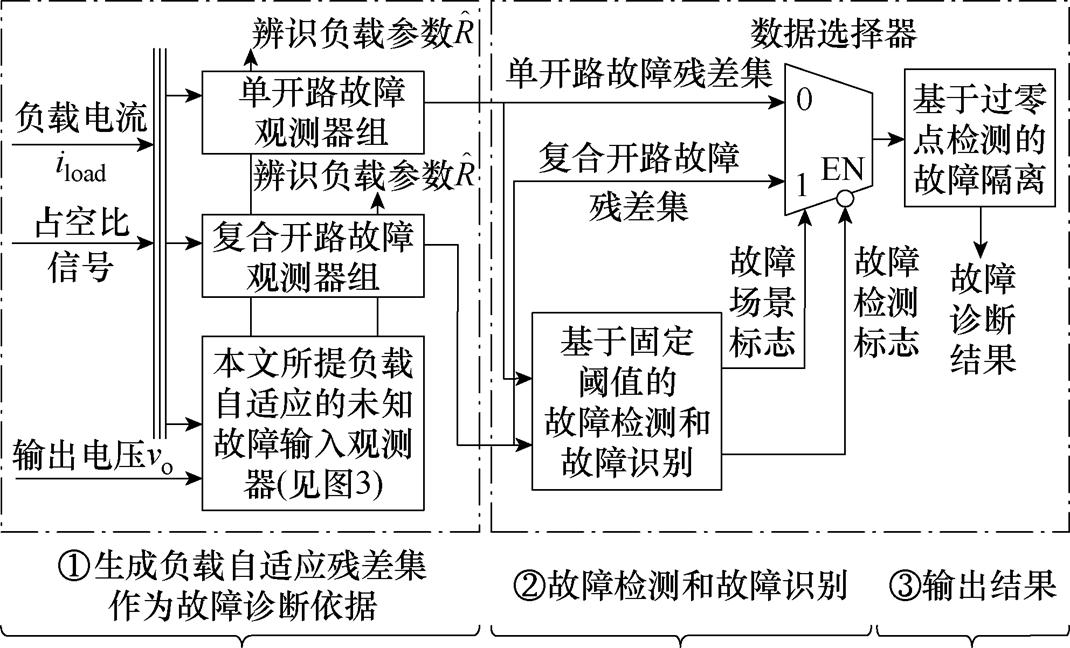
图4 复合开路故障诊断环节框图
Fig.4 The block diagram of compound open circuit fault diagnostic link
1.2.1 基于固定阈值的故障检测和识别
当系统无功率器件故障时,电感电流与平均采样值之差在一个开关周期内存在过零点,幅值为DiL;当功率器件发生故障时,电感电流将单调递减,上一周期的平均采样值持续高于当前电流,则残差在一周期内不存在过零点,幅值为2DiL。电感电流的残差幅值特征示意图如图5所示。
以OCF23故障场景为例,负载电流将同时受到两个功率器件故障的影响,故障瞬态期间将以斜率-2Vo/L单调递减。此时单开路故障观测器组中,负载电流的变化全部作用于故障估计,故障估计残差幅值由DiL增至4DiL;而复合开路故障观测器组中,负载电流的变化将均分到各个故障估计中,估计残差幅值由DiL增至2DiL。因此,单开路故障观测器组和复合开路故障观测器组在多功率器件故障场景下残差幅值变化不同,本文通过设计不同的固定阈值实现故障检测和识别。
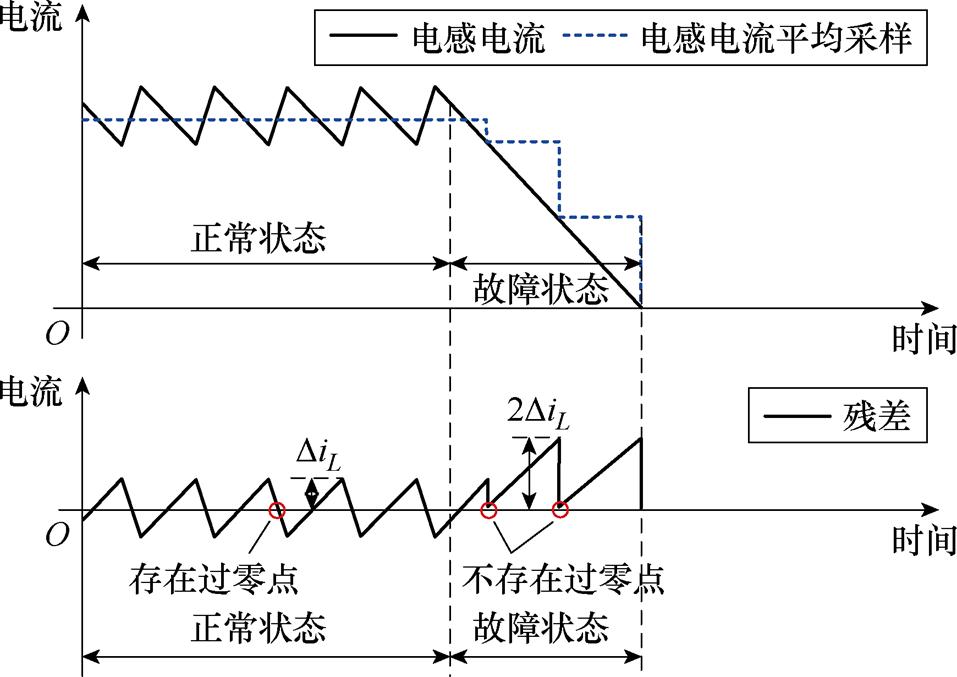
图5 电感电流的残差幅值特征示意图
Fig.5 Diagram of the residual amplitude of the inductor current
单相Buck变换器的电感纹波表达式为
 (7)
(7)
式中,Vin为输入电压;fsw为开关频率;L为电感。
通过设计另一固定阈值用于区分单一功率器件故障和多个功率器件故障。阈值选取主要考虑电感电流残差幅值特征和不确定因素偏差两个方面,其选取表达式为
 (8)
(8)
式中,n为功率器件故障的数量,n=1时对应单个功率器件开路故障诊断阈值,n>1时对应多个功率器件开路故障诊断阈值;Dn为考虑不确定因素影响下的阈值增量。本文所考虑的不确定性因素主要为电压电流传感器测量偏差和输入电压波动影响,阈值增量的设置用以保证这些不确定因素影响下的故障诊断鲁棒性。本文综合考虑10%最大测量偏差和5%输入电压波动影响,选择Dn=20%。
1.2.2 基于过零点检测的故障隔离
以故障OCF23时未知故障输入观测器UFIO23为例,可通过观测器的故障估计残差在单个周期内是否过零点判断故障组合。首先确定故障分布矩阵E23和对应的坐标变换矩阵T23以及观测矩阵H23,此时故障估计辅助变量z2和z3的动态方程分别为
 (9)
(9)
 (10)
(10)
提出一个负号,可以得到
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
由式(11)~式(14)可知,所提观测器UFIO23故障估计 和
和 由负载电流
由负载电流 和辅助变量z1、z2和z3组成。其中,辅助状态变量z1、z2和z3为各相电感电流的开环估计。
和辅助变量z1、z2和z3组成。其中,辅助状态变量z1、z2和z3为各相电感电流的开环估计。
UFIO23的辅助变量和状态估计的表达式为
 (15)
(15)
 (16)
(16)
当变换器发生OCF23故障时,UFIO23的故障估计和将同时受到故障影响,负载电流中包含的故障信息将以原始幅值的一半反馈到故障估计和中,抵消故障估计本身的作用,而状态估计 不受OCF23故障的影响。因此,在功率器件发生故障时,只有与该故障对应的故障估计残差在单个开关周期内不会出现过零点,从而实现故障隔离。
不受OCF23故障的影响。因此,在功率器件发生故障时,只有与该故障对应的故障估计残差在单个开关周期内不会出现过零点,从而实现故障隔离。
根据变换器故障模型和未知故障输入观测器结构,所提观测器的状态估计误差动态方程为
 (17)
(17)
根据图3中的公式,合并同类项后为

 (18)
(18)
由式(18)可知,动态方程中存在参数估计误差的导数项,则将此导数项放至动态方程左侧,与状态估计误差整合成一个新的联合估计误差为
 (19)
(19)
则负载估计误差和联合估计误差动态方程为
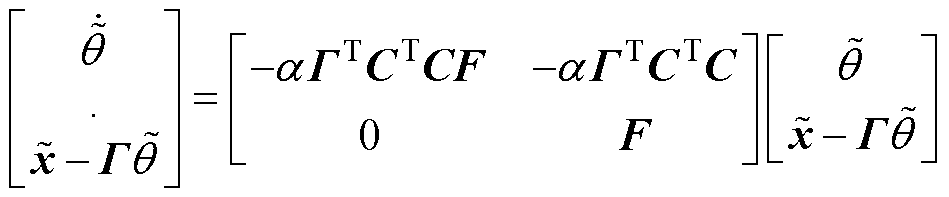 (20)
(20)
由式(20)可知,设置未知故障输入观测器增益矩阵F和自适应增益矩阵Γ,使得状态转移矩阵对角元素为负,即可保证联合估计误差的收敛性,则矩阵F和Γ特征值均为负数,这一目标通过图3中的矩阵设计实现。
三相交错并联Buck变换器采用电压电流双环控制,其中电压外环的比例系数为0.01,积分系数为36,电流内环的比例系数为0.1,积分系数为10。仿真及实验参数见表1。
表1 仿真及实验参数
Tab.1 The simulation and experimental parameters
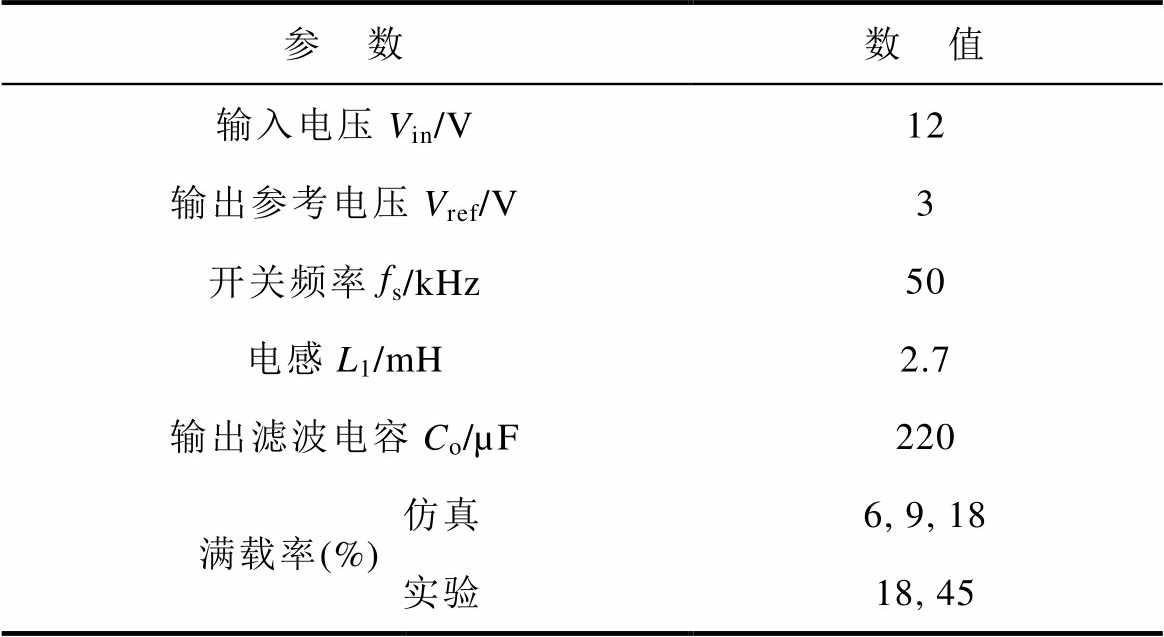
参 数数 值 输入电压Vin/V12 输出参考电压Vref/V3 开关频率fs/kHz50 电感L1/mH2.7 输出滤波电容Co/µF220 满载率(%) 仿真6, 9, 18 实验18, 45
为验证所提未知故障输入观测器的状态估计和参数辨识性能,在仿真时间t=0.015 s时,令功率突减时满载率由9%(R=1 W)降为6%(R=1.5 W),功率突增时满载率由6%(R=1.5 W)升为18%(R= 0.5 W)。
2.1.1 稳态和暂态下电感电流和输出电压估计
所提未知故障输入观测器的电感电流和输出电压状态估计结果(功率突减、功率突增)分别如图6和图7所示。由图6、图7可以看出,在功率突变前后,所提观测器的状态估计与实际测量值之间保持了高度的一致性,功率突减时所提观测器电感电流状态估计平均误差为1.46%,输出电压状态估计误差为0.1%,功率突增时所提观测器的电感电流状态估计平均误差为1.53%,输出电压状态估计误差为0.3%。仿真结果表明,所提观测器能够准确有效地追踪系统状态的真实变化,且能够在功率突变瞬态以及稳态期间实现稳定状态估计。
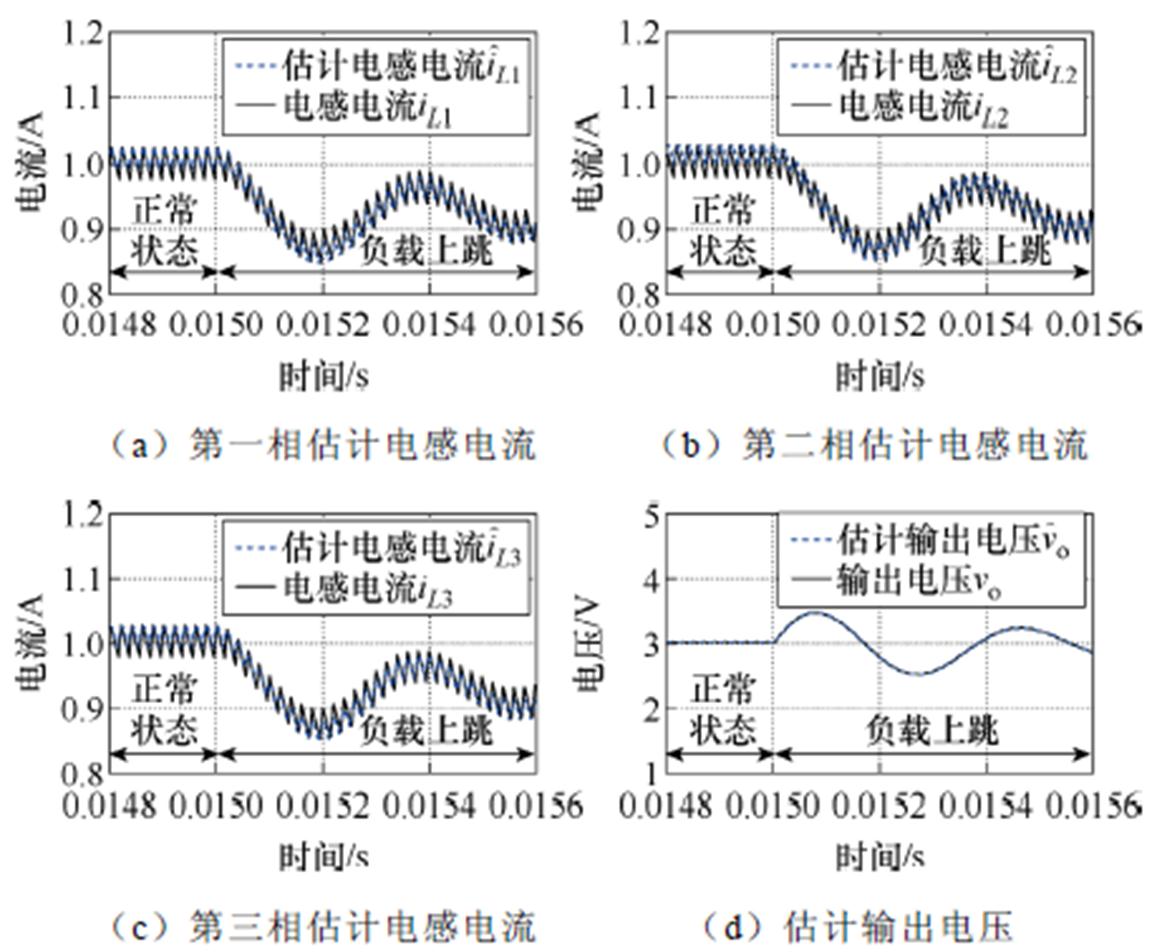
图6 所提未知故障输入观测器的电感电流和输出电压状态估计结果(功率突减)
Fig.6 Inductor current state estimation results of proposed unknown input observer (sudden power reduction)
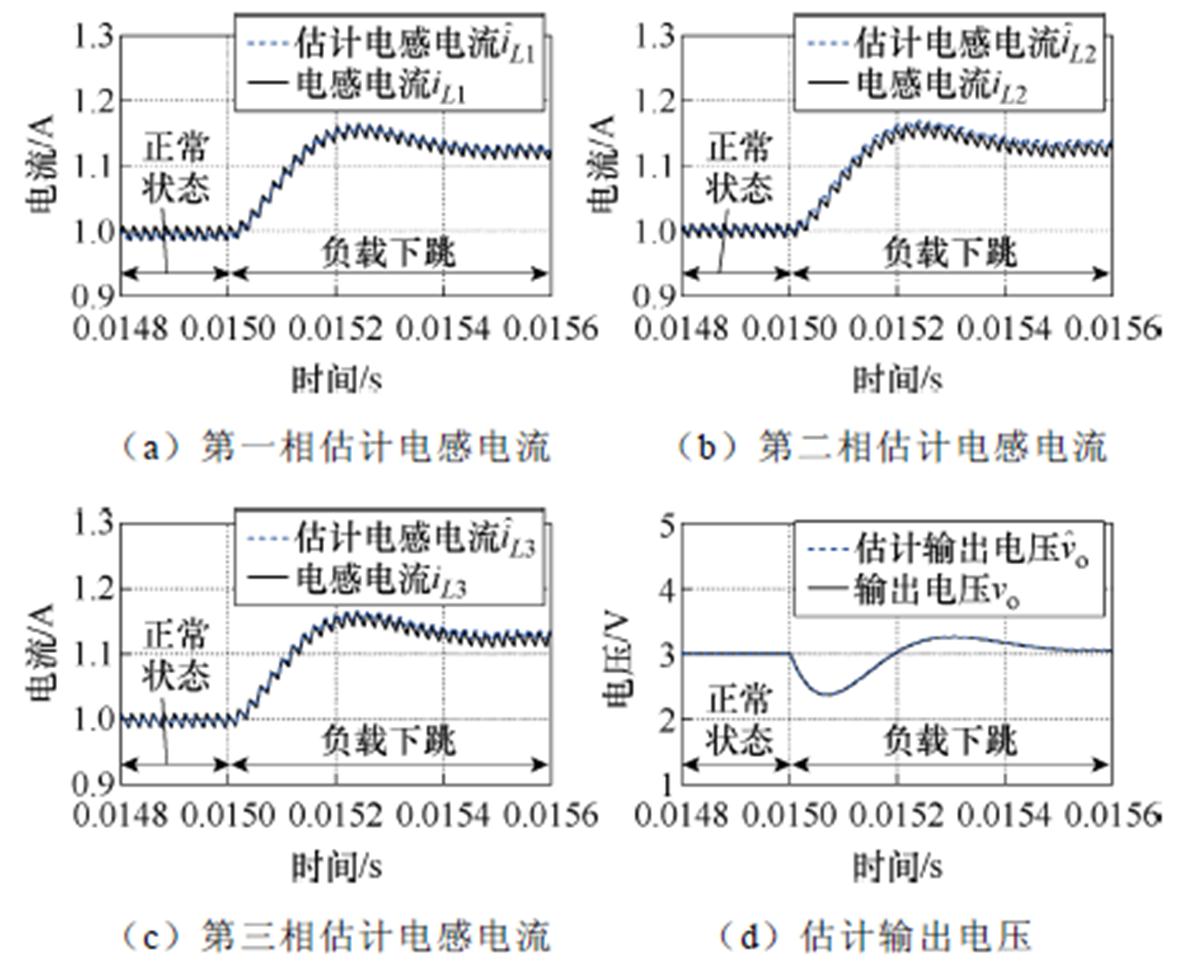
图7 所提未知故障输入观测器的电感电流和输出电压状态估计结果(功率突增)
Fig.7 Inductor current and output voltage state estimation results of proposed unknown fault input observer (sudden power surge)
2.1.2 自适应负载参数辨识结果
所提未知故障输入观测器的自适应负载参数辨识结果如图8所示,黑色实线和点画线分别表示在t=0.015 s时刻设置的负载上跳、下跳工况;蓝色点线和红色虚线分别表示负载上跳、下跳时所提未知故障输入观测器的自适应负载参数辨识结果。设置满载率为6%(R=1.5 W),突增至18%(R=0.5 W);设置满载率为9%(R=1 W),突减至6%(R=1.5 W),可见功率突变后,所提观测器均能在20 ms内完成对新负载参数辨识。
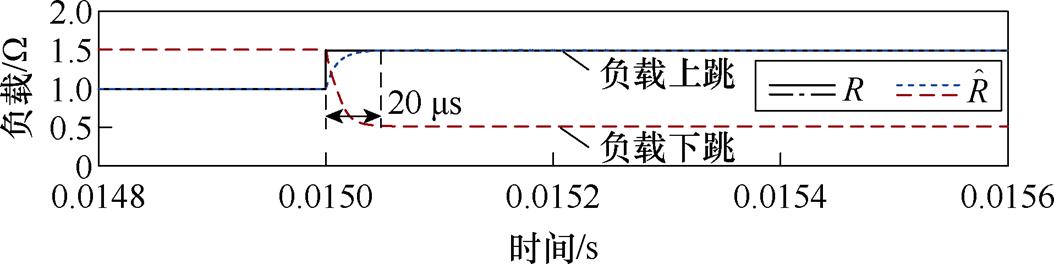
图8 所提未知故障输入观测器的自适应负载参数辨识结果
Fig.8 Adaptive load parameter identification results of the proposed unknown fault input observer
2.2.1 恒定负载下的诊断性能
恒定负载场景下,设置满载率恒为9%(R=1 W),在仿真时间t=0.02 s时,令变换器发生OCF23故障。此时单开路故障观测器UFIO1和复合开路故障观测器UFIO23的故障估计平均采样值和故障估计残差如图9所示。
由图9可知,单开路故障观测器的故障估计残差超过故障识别阈值,且复合开路故障观测器的故障估计残差超过故障检测阈值,UFIO23的两相故障估计残差均过零点,说明发生了OCF23故障。因此,恒定负载下所提故障诊断方法能检测到系统发生功率器件故障,并确定故障数目和位置。
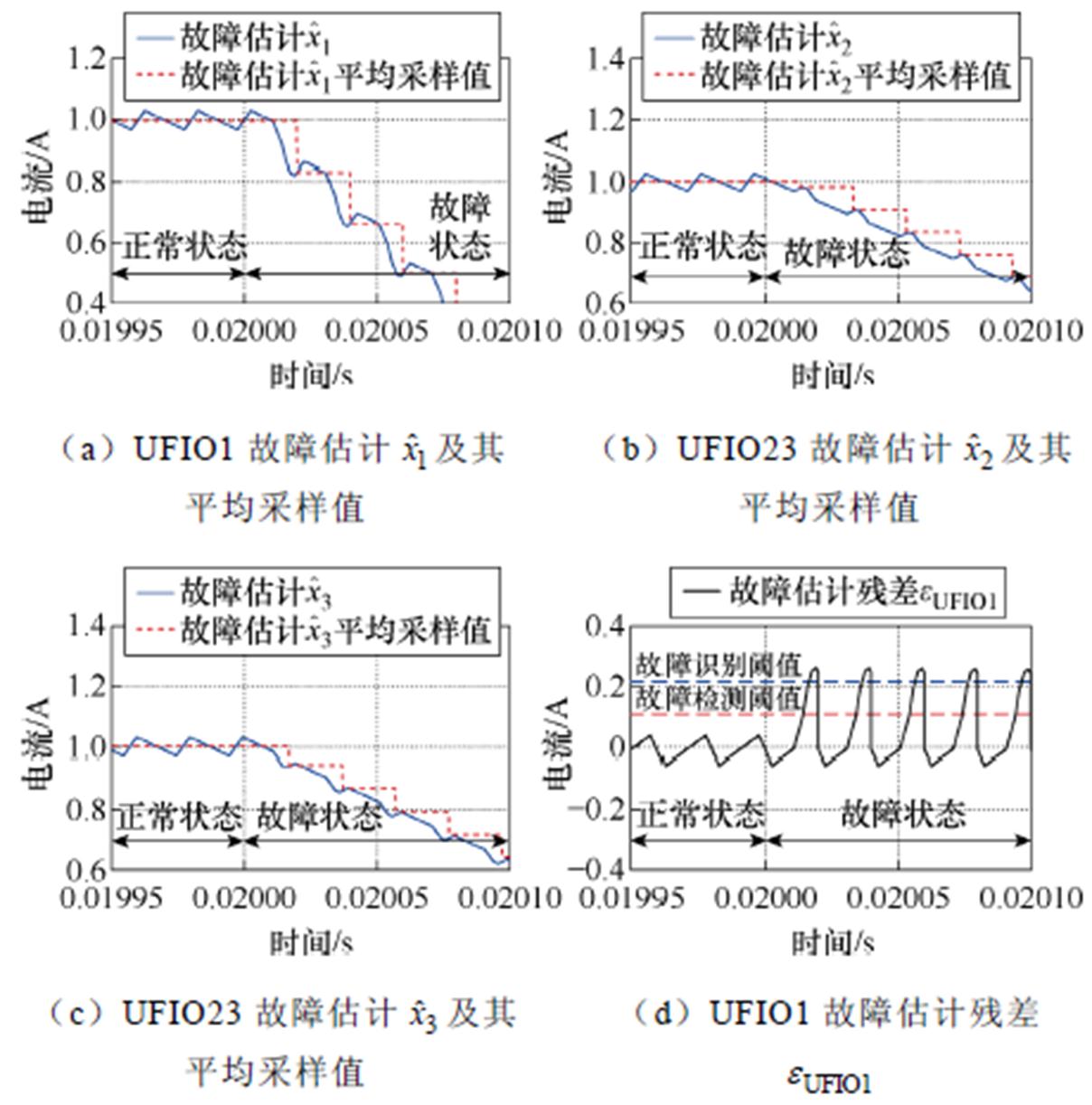
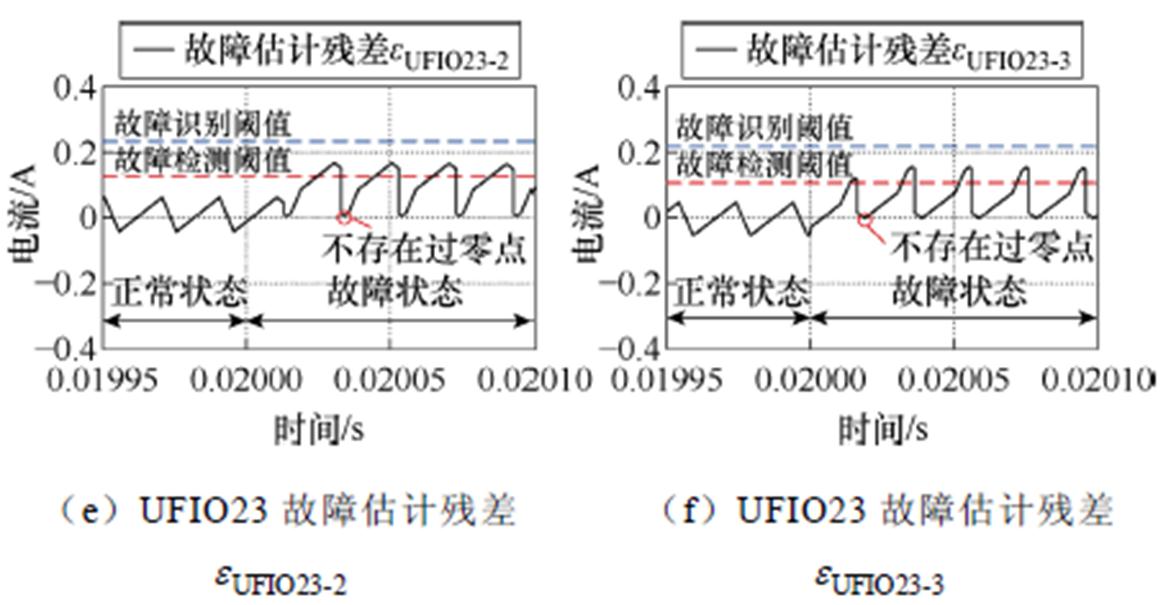
图9 UFIO1和UFIO23的故障估计平均采样值及故障估计残差
Fig.9 Fault estimation average sampling and fault estimation residuals of adaptive observers UFIO1 and UFIO23
2.2.2 无负载自适应下的诊断性能仿真
无负载自适应时,功率突变场景下,验证负载参数失配对故障诊断性能的影响。以变换器正常运行时,功率突减/突增场景下的未知故障输入观测器UFIO1和UFIO12故障估计为例,此时的观测器未考虑自适应负载参数辨识,如图10和图11所示。
由图10和图11可知,当功率突减/突增时,不考虑负载自适应的单开路故障观测器和复合开路故障观测器故障估计残差均受到负载瞬态变化的影响,最终超过故障检测阈值和故障诊断阈值,且在负载瞬态后期,故障估计残差不存在/存在过零点,最终导致故障误诊/漏诊。
因此,需要通过自适应负载参数辨识,并将其用于更新未知故障输入观测器中的负载参数,以消除负载不确定性对故障诊断方法的影响。
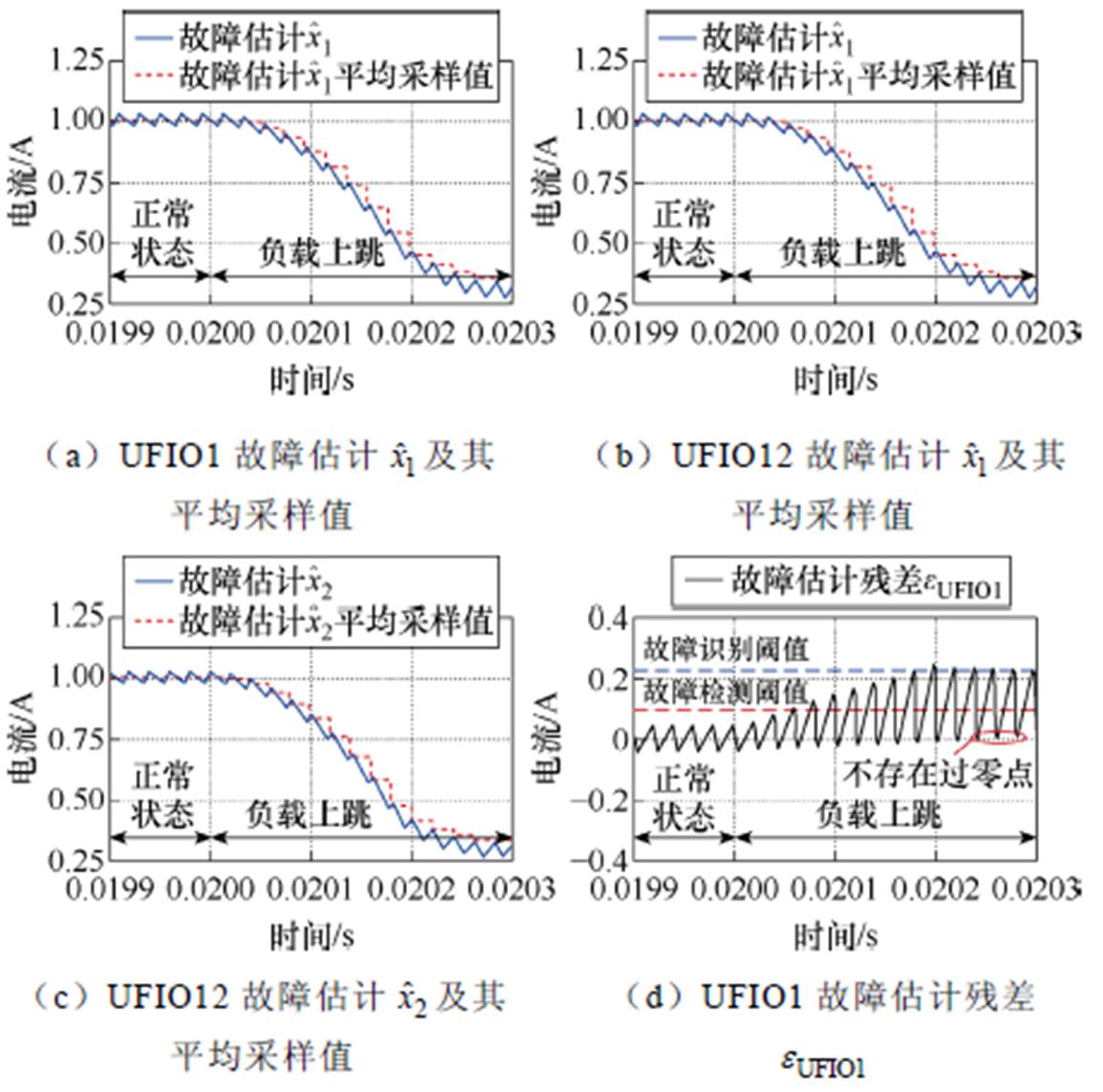
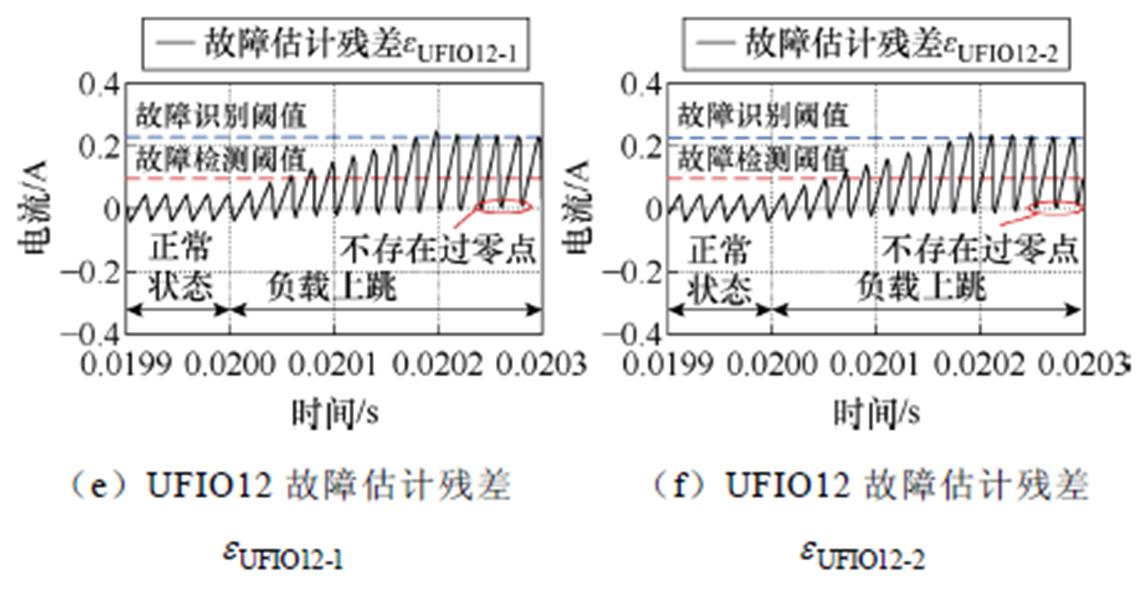
图10 无负载自适应下UFIO1和UFIO12的故障估计平均采样值及故障估计残差(功率突减)
Fig.10 Average sampled fault estimated values and fault estimated residuals for UFIO1 and UFIO12 without load adaptation (sudden power reduction)
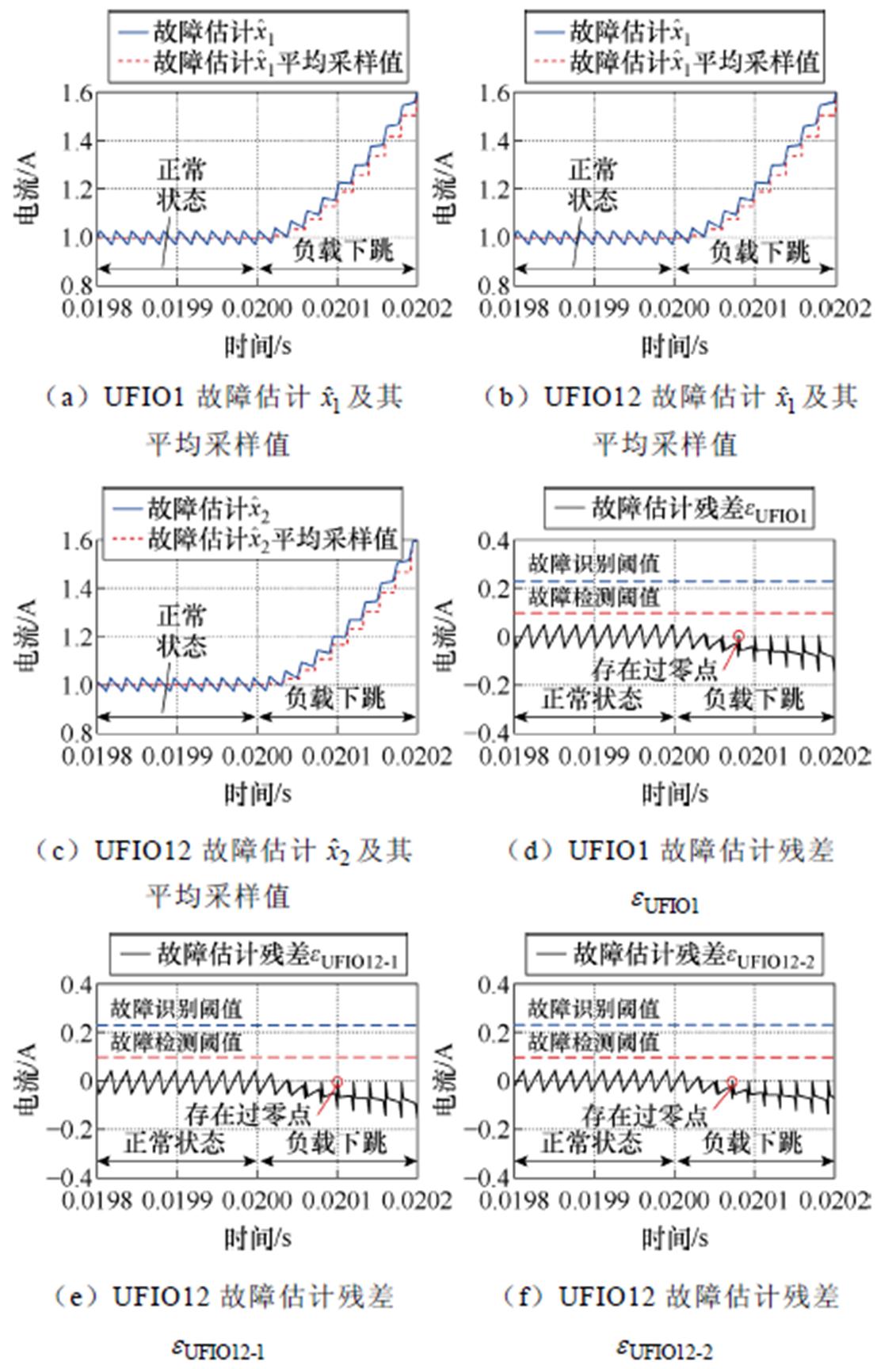
图11 无负载自适应下UFIO1和UFIO12的故障估计平均采样值及故障估计残差(功率突增)
Fig.11 Average sampled fault estimated values and fault estimated residuals for UFIO1 and UFIO12 without load adaptation (sudden power surge)
2.2.3 负载自适应下的诊断性能仿真
考虑负载自适应时,功率突变场景下,验证所提功率器件复合开路故障诊断方法的诊断性能,以变换器正常运行时,功率突变下未知故障输入观测器UFIO1和UFIO23故障估计为例。
在仿真时间t=0.02 s时,功率突减时令满载率由9%(R=1 W)降为6%(R=1.5 W),功率突增时令满载率由9%(R=1 W)升为18%(R=0.5 W)。功率突减/突增时,单开路故障观测器UFIO1和复合开路故障观测器UFIO23的故障估计平均采样值和故障估计残差如图12和图13所示。
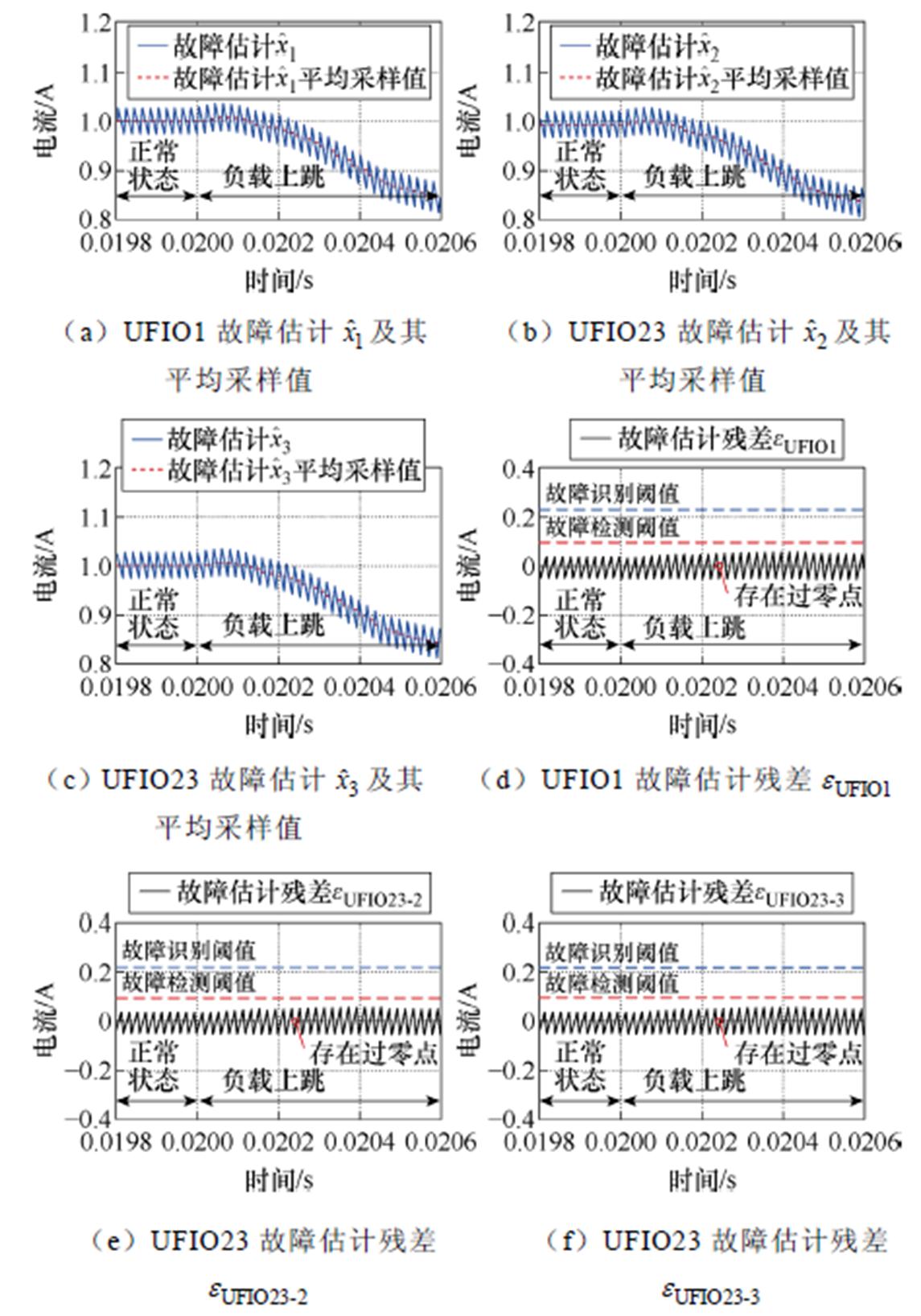
图12 负载自适应下UFIO1和UFIO23的故障估计平均采样值及故障估计残差(功率突减)
Fig.12 Average sampled fault estimated values and fault estimated residuals for UFIO1 and UFIO23 under load adaptation (sudden power reduction)
通过对负载参数进行辨识并将其用于更新观测器负载参数中,消除负载参数与其观测量之间的不匹配,所提观测器故障估计残差幅值不受功率突变(负载跳变)影响。此外,故障估计残差过零点特征不受功率突变影响。因此,所提功率器件复合开路故障诊断方法能克服功率突变时误诊、漏诊的 问题。
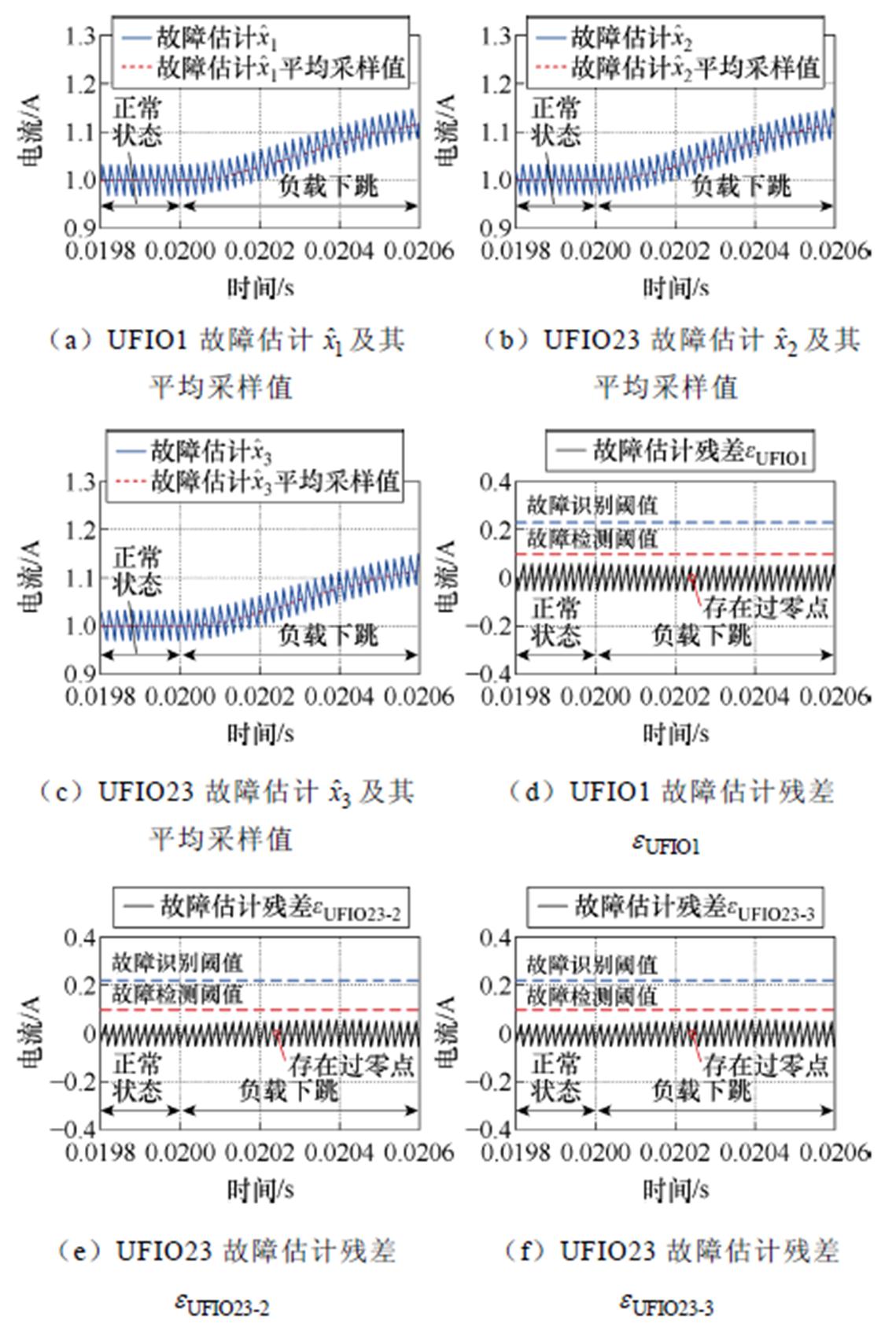
图13 负载自适应下UFIO1和UFIO23的故障估计平均采样值及故障估计残差(功率突增)
Fig.13 Average sampled fault estimated values and fault estimated residuals for UFIO1 and UFIO23 under load adaptation (sudden power surge)
本文所设计的数字控制三相交错并联Buck变换器实验功能框图及其平台如图14和图15所示。在200 MHz主频的FPGA控制器下,整体诊断时间控制在34~40 ms之间,如图14所示,FPGA中的观测器模块承担了高计算量的自适应律与矩阵更新(14~16 ms),而残差生成与处理(7~8 ms)、残差判断与故障定位(4~5 ms)、输出故障诊断结果(3~4 ms)等环节耗时较低。
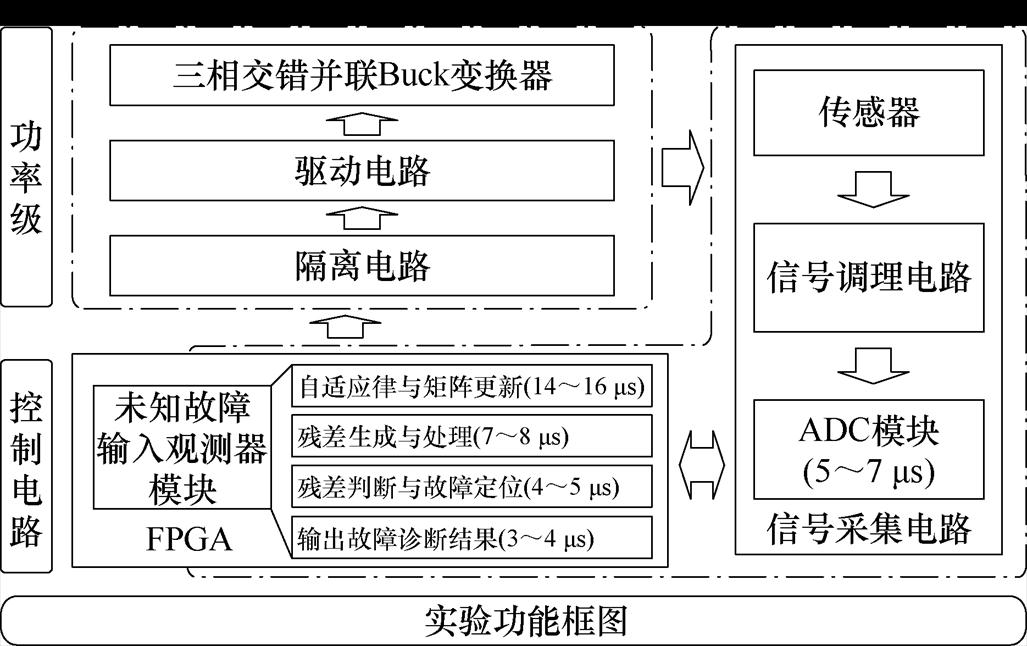
图14 三相交错并联Buck变换器实验功能框图
Fig.14 The functional block diagram of three-phase interleaved Buck converter
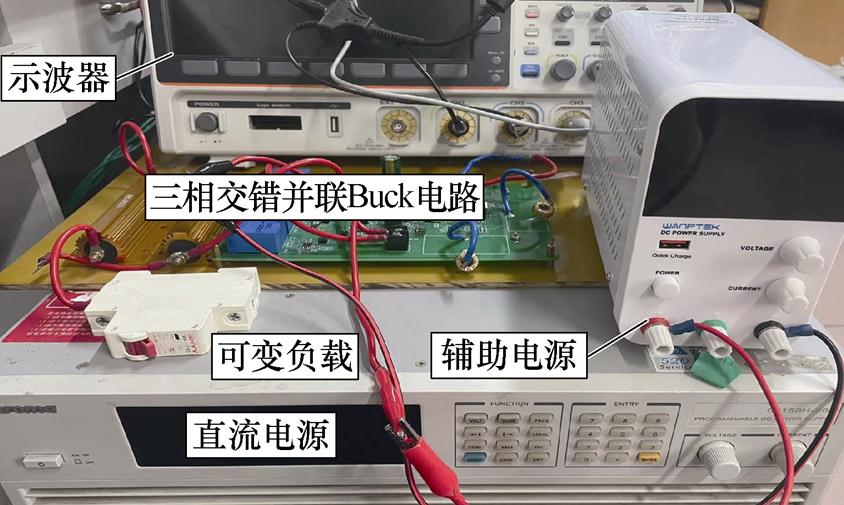
图15 数字控制三相交错并联Buck变换器实验平台
Fig.15 The digitally controlled three-phase interleaved Buck converter experimental platform
实验将从不考虑负载自适应和考虑负载自适应的故障诊断方法进行验证。其中,不考虑负载自适应的故障诊断以复合开路故障OCF23为例,保持负载恒定,以评估负载自适应收敛过程对故障诊断快速性的影响;考虑负载自适应的故障诊断分别针对无开路故障、单开路故障、复合开路故障进行验证,以评估所提方法在变负载工况下的诊断性能。
2.3.1 无负载自适应下功率器件复合开路故障的诊断性能
无负载自适应下功率器件复合开路故障时电感电流波形及诊断结果如图16所示。恒定负载下,在变换器运行时,注入第二相和第三相功率器件故障OCF23。此时三相交错并联Buck变换器的各相电感电流波形如图16a所示,其中示波器通道四用于指示故障发生的时刻。在OCF23发生后,电感电流I2和I3立即开始下降直至为0,而电感电流I1同时受到负载瞬态和故障瞬态的影响,继续增大。
由图16b和图16c可知,功率器件复合开路故障标志OCF23在故障发生后两个开关周期内置位,而其余故障标志在功率突变后和故障发生后均未置位,说明所提故障诊断方法此时诊断系统中存在OCF23故障,诊断结果与实际情况相符。
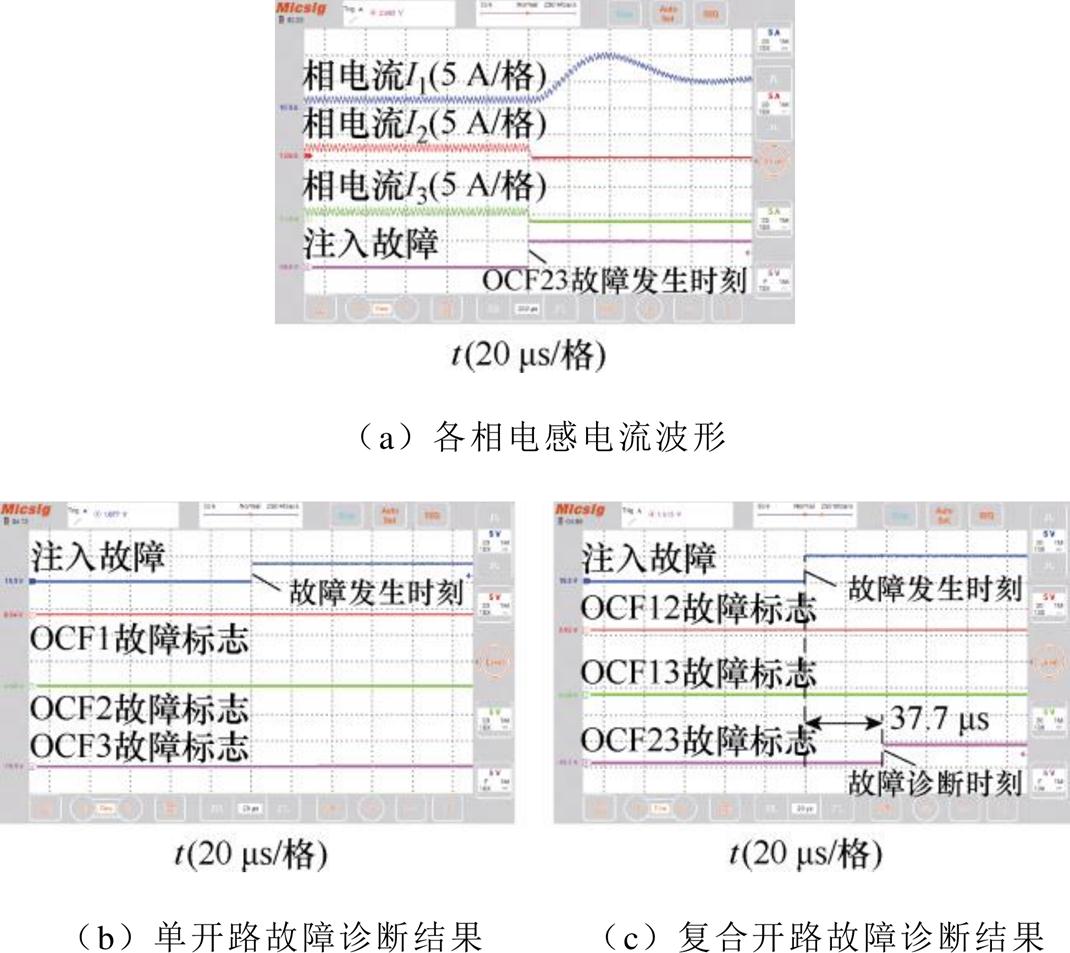
图16 无负载自适应下功率器件复合开路故障(OCF23)时电感电流波形及诊断结果
Fig.16 Inductor current waveforms and diagnostic results during power devices open circuit faults (OCF23) without load adaptation
2.3.2 无功率器件故障时的诊断性能
功率突变下无功率器件开路故障时电感电流波形及所提功率器件复合开路故障诊断方法诊断结果如图17所示。三相交错并联Buck变换器功率突增时令满载率由18%(R=0.5 W)升为45%(R=0.2 W),各相电感电流波形如图17a所示。
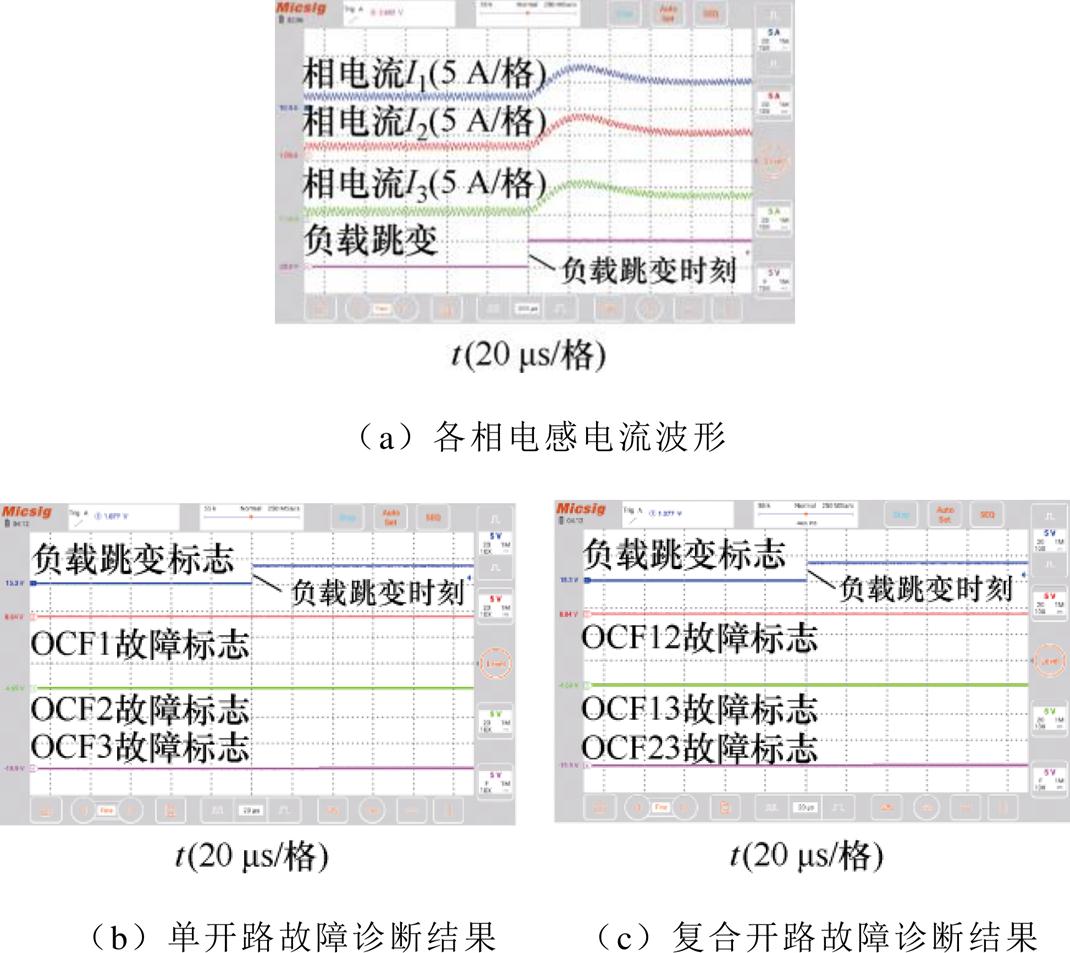
图17 功率突变下无功率器件开路故障时电感电流波形及所提功率器件复合开路故障诊断方法诊断结果
Fig.17 Inductor current waveforms during open circuit faults of powerless devices under sudden power change and diagnostic results of the proposed compound open circuit fault diagnostic method for power devices
此时,所提功率器件复合开路故障诊断方法的诊断结果如图17b和图17c所示,功率器件单开路故障标志和功率器件复合开路故障标志在功率突变后均没有置位,说明所提故障诊断方法此时并未诊断出任何功率器件故障的发生,诊断结果与实际情况相符合。
2.3.3 功率器件单开路故障时的诊断性能
功率突变下功率器件单开路故障(OCF2)时电感电流波形及所提功率器件复合开路故障诊断方法的诊断结果如图18所示。三相交错并联Buck变换器功率突增时令满载率由18%(R=0.5 W)升为45%(R=0.2 W),并在功率突变后注入第二相功率器件故障OCF2,此时各相电感电流波形如图18a所示。在OCF2发生后,第二相电感电流I2立即开始下降直至为0,而电感电流I1和I3同时受到负载瞬态和故障瞬态的影响。
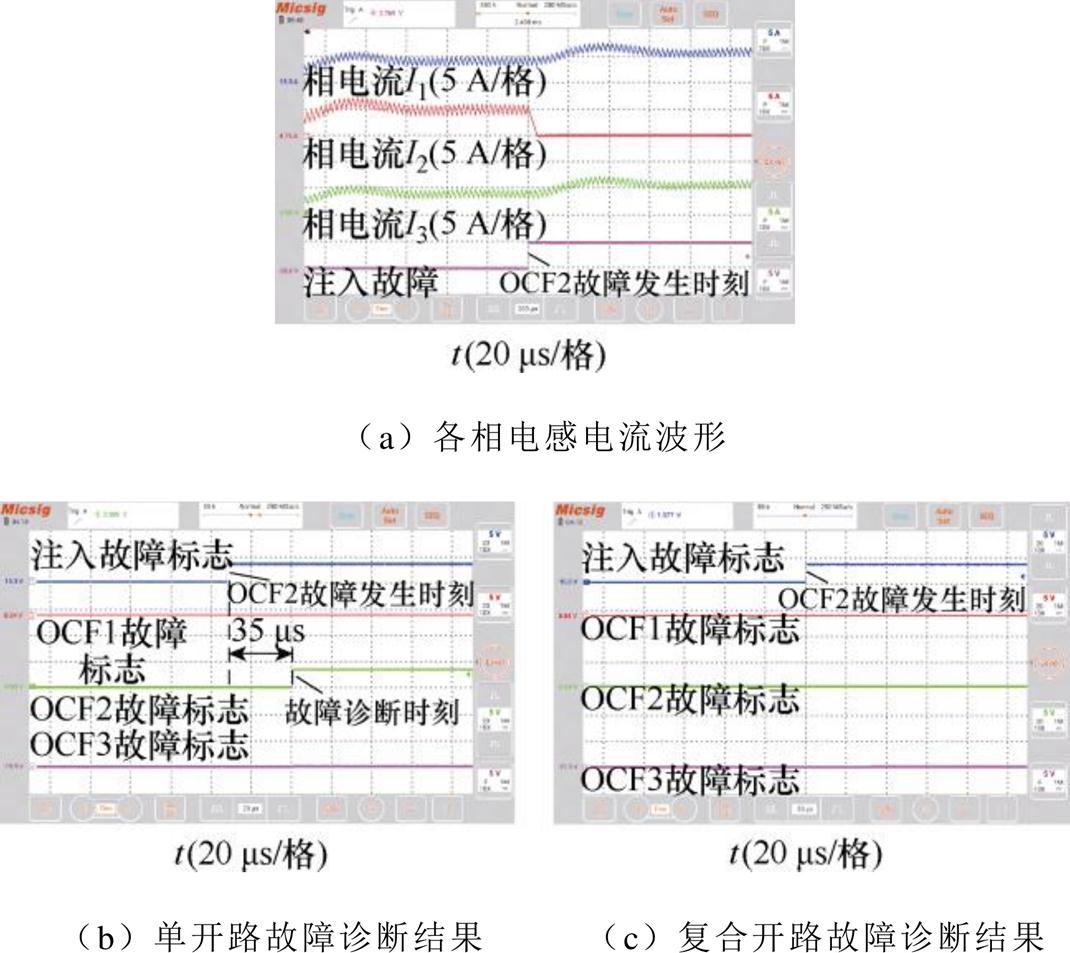
图18 功率突变下功率器件单开路故障(OCF2)时电感电流波形及所提功率器件复合开路故障诊断方法的诊断结果
Fig.18 Inductor current waveform during single open circuit fault (OCF2) of a power device under sudden power change and diagnostic results of the proposed compound open circuit fault diagnosis method for power devices
由图18b和图18c可知,单功率器件故障标志OCF2在故障发生后两个开关周期内置位,而其余故障标志在功率突变后、OCF2发生后均没有置位,说明所提故障诊断方法此时诊断系统中存在OCF2故障,诊断结果与实际情况相符合。
2.3.4 功率器件复合开路故障时的诊断性能
功率突变下功率器件复合开路故障(OCF23)时电感电流波形及所提功率器件复合开路故障诊断方法的诊断结果如图19所示。三相交错并联Buck变换器功率突增时令满载率由18%(R=0.5 W)升为45%(R=0.2 W),并在功率突变后注入第二相和第三相功率器件故障OCF23,此时各相电感电流波形如图19a所示。在OCF23发生后,电感电流I2和I3立即开始下降直至为0,而电感电流I1同时受到负载瞬态和故障瞬态的影响,继续增大。
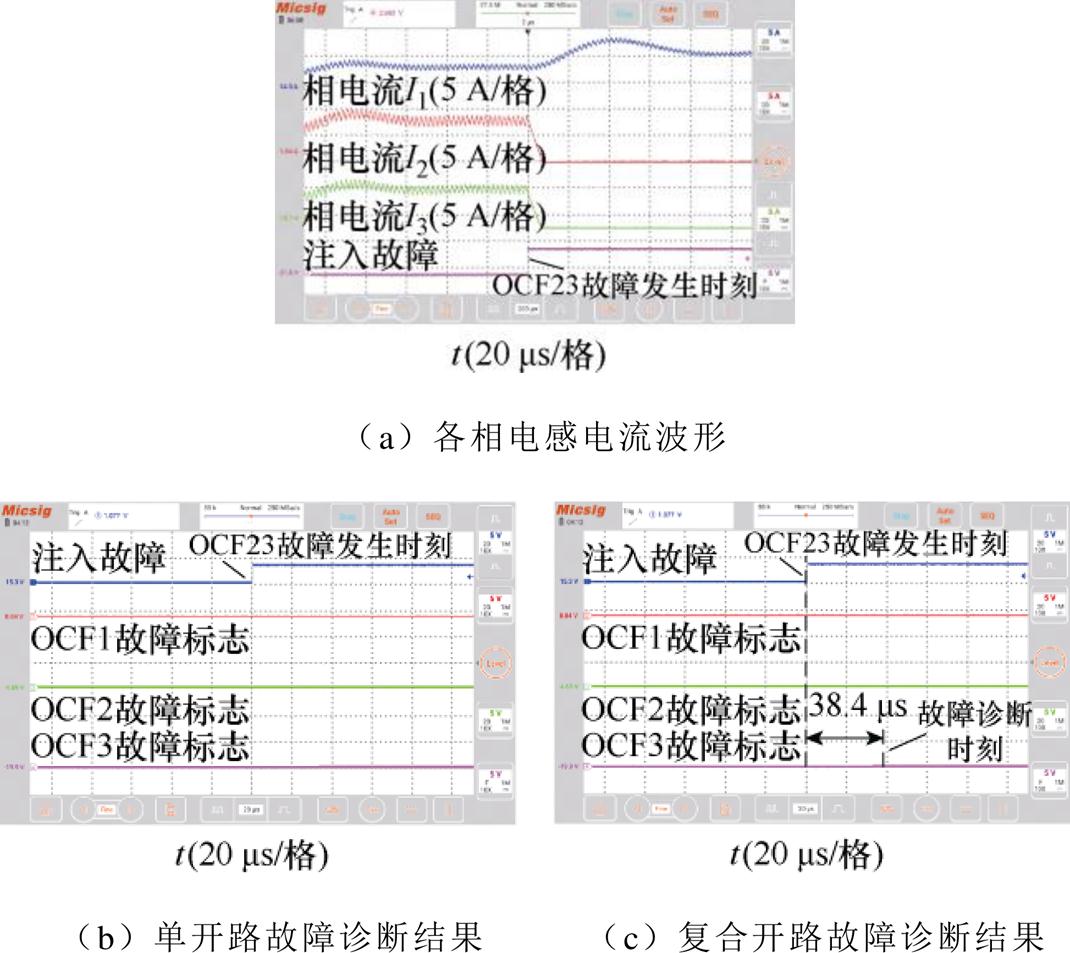
图19 功率突变下功率器件复合开路故障(OCF23)时电感电流波形及所提功率器件复合开路故障诊断方法的诊断结果
Fig.19 Inductor current waveforms during power device compound open circuit fault (OCF23) under sudden power change and diagnostic results of the proposed compound open circuit fault diagnostic method for power device
由图19b和图19c可知,功率器件复合开路故障标志OCF23在故障发生后两个开关周期内置位,而其余故障标志在功率突变后和故障发生后均未置位,说明所提故障诊断方法此时诊断系统中存在OCF23故障,诊断结果与实际情况相符合。
以上实验结果表明,不考虑负载自适应的复合开路故障诊断时间约为37.7 ms,考虑负载自适应时的复合开路故障诊断时间约为38.4 ms,两者存在约0.7 ms的时间差,总体对故障诊断的快速性影响不大。虽然引入参数自适应略微增加了诊断时间,但它有效地解决了功率突变引起的故障漏诊和误诊问题,提升了诊断的准确性。此外,从信号采样至自适应残差集的生成需要1个开关周期,从残差集至故障诊断结果的输出再需要1个开关周期,所提故障诊断方法在功率器件单开路故障和功率器件复合开路故障时,均能在功率突变后两个开关周期内提供正确的故障诊断结果。
然而,关闭故障所在相后,健全相将承担全部负荷,可能导致过载运行,影响系统稳定性。因此,在故障隔离后,需要采取备用相切换或降额运行与功率管理策略,通过自动接入运行的备用相分担负载,避免健全相长时间过载。若备用相无法快速接入,则应动态调整变换器的输出功率,通过降额运行确保健全相电流工作在安全范围内,并结合功率管理算法调整负载分配,以降低故障对变换器整体性能的影响。后续研究将进一步完善故障隔离后的处置方案,以提升系统的抗故障能力和运行稳定性。
针对多相Buck变换器中存在的复合开路故障问题,即两相或多相功率器件同时发生开路故障,本文提出了基于未知故障输入观测器的多相Buck变换器复合开路故障诊断方法,进行了相应的仿真和实验验证,具体的结论如下:
1)利用未知故障输入观测器重构了各相电感电流,在负载不确定变化和输入电压波动情况下,实现了电感电流状态的动态追踪。
2)仿真实验结果表明,所提故障诊断方法能在两个开关周期内实现变负载工况下复合开路故障的准确定位。
3)所提故障诊断方法具有应用上的通用性,可类推至其他电力电子拓扑对象。
参考文献
[1] 王涛, 赵丛森, 谭长成, 等. 多相交错并联DC-DC变换器在相电感偏差时的电流重构策略[J]. 电工技术学报, 2025, 40(14): 4567-4583.
Wang Tao, Zhao Congsen, Tan Changcheng, et al. Multi phase interleaved DC-DC converter under phase inductance deviation current reconstruction strategy[J]. Transactions of China Electrotechnical Society, 2025, 40(14): 4567-4583.
[2] 张理, 韩民晓, 范溢文. 多相堆叠交错并联制氢变换器控制策略与特性分析[J]. 电工技术学报, 2023, 38(2): 485-495.
Zhang Li, Han Minxiao, Fan Yiwen. Control strategy and characteristic analysis of multi-phase stacked interleaved Buck converter for hydrogen production[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 485-495.
[3] 刘泽, 周国华, 何英杰, 等. 两相交错并联Buck变换器集成磁器件多维度建模与多目标优化[J/OL]. 电工技术学报, 2025: 1-13[2025-05-10]. DOI: 10. 19595/j.cnki.1000- 6753.tces.242241.
Liu Ze, Zhou Guohua, He Yingjie, et al. Multidi- mensional modeling and multi-objective optimization of integrated magnetic device for two-phase inter- leaved Buck converter[J/OL]. Transactions of China Electrotechnical Society, 2025: 1-13[2025-05-10]. DOI: 10.19595/j. cnki.1000- 6753.tces.242241.
[4] 罗朋, 潘锦超, 洪濬哲, 等. 用于直流微电网的高升压变换器设计及效率优化[J]. 电工技术学报, 2023, 38(20): 5530-5546.
Luo Peng, Pan Jinchao, Hong Junzhe, et al. Design and efficiency optimization of a high step-up con- verter for DC microgird[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5530-5546.
[5] 王晓姬, 王道涵, 王柄东, 等. 电动汽车驱动/充电一体化系统及其控制策略综述[J]. 电工技术学报, 2023, 38(22): 5940-5958.
Wang Xiaoji, Wang Daohan, Wang Shuangdong, et al. A review of drive-charging integrated systems and control strategies for electric vehicles[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(22): 5940-5958.
[6] Kirshenboim O, Peretz M M. High-efficiency nonisolated converter with very high step-down conversion ratio[J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3683-3690.
[7] 郭小强, 魏玉鹏, 万燕鸣, 等. 新能源制氢电力电子变换器综述[J]. 电力系统自动化, 2021, 45(20): 185-199.
Guo Xiaoqiang, Wei Yupeng, Wan Yanming, et al. Review on power electronic converters for producing hydrogen from renewable energy sources[J]. Auto- mation of Electric Power Systems, 2021, 45(20): 185-199.
[8] 魏新港. Buck变换器关键器件非侵入式健康状态监测与故障预警[D]. 北京: 北京交通大学, 2022.
Wei Xingang. Noninvasive health state monitoring and fault early warning for key devices of Buck converter[D]. Beijing: Beijing Jiaotong University, 2022.
[9] 许水清, 黄文展, 何怡刚, 等. 基于自适应滑模观测器的中点钳位型三电平并网逆变器开路故障诊断[J]. 电工技术学报, 2023, 38(4): 1010-1022.
Xu Shuiqing, Huang Wenzhan, He Yigang, et al. Open-circuit fault diagnosis method of neutral point clamped three-level grid-connected inverter based on adaptive sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 1010- 1022.
[10] de Lacerda A L, da Silva E R C. Study of failures in a three-phase active neutral point clamped rectifier: Short-circuit and open-circuit faults[C]//2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 2015: 4773-4780.
[11] Li Chuanfeng, Yu Yang, Tang Tingyan, et al. A robust open-circuit fault diagnosis method for three- phase interleaved Boost converter[J]. IEEE Transa- ctions on Power Electronics, 2022, 37(9): 11187- 11198.
[12] Gupta A K, Kumar M. Characterization and switch localization of three-phase interleaved Buck converter under open-circuit faults[C]//2022 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 2022: 1-6.
[13] Gupta A K, Kumar M. Characterization and locali- zation of open circuit faults for n-phase interleaved Buck converter[J]. IEEE Transactions on Industry Applications, 2024, 60(2): 3273-3283.
[14] Wei Hongqian, Zhang Youtong, Yu Lei, et al. A new diagnostic algorithm for multiple IGBTs open circuit faults by the phase currents for power inverter in electric vehicles[J]. Energies, 2018, 11(6): 1508.
[15] 董丽燕, 李雪刚, 傅博, 等. 基于模型预测控制的电动汽车直流充电桩功率器件开路故障诊断方法[J]. 电工技术, 2023(15): 41-46.
Dong Liyan, Li Xuegang, Fu Bo, et al. An open- circuit fault diagnosis method for EV DC charging pile power device based on model predictive control[J]. Electric Engineering, 2023(15): 41-46.
[16] 白志红, 蒋守赞, 郭咏春. 基于双重滑模观测器的MMC开关管开路故障诊断与定位策略[J]. 电力系统自动化, 2024, 48(14): 147-156.
Bai Zhihong, Jiang Shouzan, Guo Yongchun. Open- circuit fault diagnosis and location strategy of switches in modular multilevel converter based on dual sliding mode observers[J]. Automation of Elec- tric Power Systems, 2024, 48(14): 147-156.
[17] 周健耀, 王天真, 韩金刚, 等. 一种特定系数小波重构数据增强逆变器故障诊断方法[J/OL]. 电源学报, 2023: 1-12[2025-05-10]. https://kns.cnki.net/ kcms2/detail/12.1420. TM.2023074.1713.002.html.
Zhou Jianyao, Wang Tianzhen, Han Jingang, et al. Fault diagnosis method for inverter based on data augmentation with specific coefficients wavelet reconstruction[J/OL]. Journal of Power Supply, 2023: 1-12[2025-05-10]. https://kns.cnki.net/kcms2/detail/ 12.1420.TM.2023074.1713.002.html.
[18] 张鹏, 刘洋, 王伟康, 等. 基于模型预测控制的多相交错Buck变换器动态响应优化方法[J/OL]. 电源学报, 2023: 1-13[2025-05-10]. https://link.cnki.net/ urlid/12.1420.tm.20230822.0908.002.
Zhang Peng, Liu Yang, Wang Weikang, et al. Dynamic response optimization method for multi- phase interleaved Buck converter based on model predictive control[J/OL]. Journal of Power Supply, 2023: 1-13[2025-05-10]. https://link.cnki.net/urlid/ 12.1420.tm.20230822.0908.002.
[19] 黄红杰, 皇金锋, 周杰. 基于有限时间观测器的两级式储能变流器改进滑模自抗扰控制[J]. 电工技术学报, 2025, 40(1): 178-189.
Huang Hongjie, Huang Jinfeng, Zhou Jie. Two-stage power conversion system based on finite time observer[J]. Transactions of China Electrotechnical Society, 2025, 40(1): 178-189.
[20] 于新红, 操建生, 许立斌, 等. 基于自适应线性扩张状态观测器的双有源桥变换器无模型预测电压控制[J]. 高电压技术, 2024, 50(9): 4184-4194.
Yu Xinhong, Guan Jiansheng, Xu Libin, et al. Model- free predictive voltage control of dual active bridge converter based on adaptive linear extended state observer[J]. High Voltage Engineering, 2024, 50(9): 4184-4194.
[21] Li Po, Li Xiang, Zeng Tao. A fast and simple fault diagnosis method for interleaved DC-DC converters based on output voltage analysis[J]. Electronics, 2021, 10(12): 1451.
[22] 巫庆辉, 申世伟, 成凯, 等. 三相交错并联Buck变换器的高阶滑模自抗扰控制[J/OL]. 电力系统及其自动化学报, 2024: 1-8[2025-05-10]. DOI: 10.19635/ j.cnki.csuepsa.001530.
Wu Qinghui, Shen Shiwei, Cheng Kai, et al. High order sliding mode active disturbance rejection control for three-phase staggered parallel Buck con- verter[J/OL]. Proceedings of the CSU-EPSA, 2024: 1-8[2025-05-10]. DOI: 10.19635/j.cnki.csuepsa.001530.
[23] 黄澄扬. 基于太阳能电池组件失配的户用型光伏发电系统的研究[D]. 扬州: 扬州大学, 2014.
Huang Chengyang. The research for mismatched PV modules in a household PV generation system[D]. Yangzhou: Yangzhou University, 2014.
[24] Wassinger N, Penovi E, Retegui R G, et al. Open- circuit fault identification method for interleaved converters based on time-domain analysis of the state observer residual[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3740-3749.
[25] Guezmil A, Berriri H, Pusca R, et al. Unknown input observer-based fault diagnosis in induction machine: theory and experiment[J]. Electric Power Components and Systems, 2018, 46(11/12): 1351-1363.
[26] 李宁, 李颖晖, 朱喜华, 等. 混杂系统理论及其在三相逆变电路开路故障诊断中的应用[J]. 电工技术学报, 2014, 29(6): 114-119.
Li Ning, Li Yinghui, Zhu Xihua, et al. Fault diagnosis for power electronic circuits based on mixed logic dynamic model and incident identification vector[J]. Transactions of China Electrotechnical Society, 2014, 29(6): 114-119.
[27] 张建成, 朱芳来. 匹配条件不满足时线性系统未知输入观测器设计[J]. 控制理论与应用, 2017, 34(4): 441-448.
Zhang Jiancheng, Zhu Fanglai. Linear system unknown input observer design when the observer matching condition is not satisfied[J]. Control Theory & Applications, 2017, 34(4): 441-448.
Abstract Multi-phase interleaved parallel Buck converters are susceptible to compound open-circuit faults (simultaneous failures in two or more phases) under high-intensity operating conditions. However, existing fault diagnosis methods utilizing inductive current observers can determine the number of faulty phases but encounter difficulties in accurately isolating multi-phase fault information from coupled outputs, especially under load uncertainty, which often leads to misdiagnosis and missed faults. This paper proposes a compound open-circuit fault diagnosis method for multi-phase Buck converters based on an unknown fault input observer (UFIO).
A three-phase interleaved parallel Buck converter serves as the research object, where output voltage and load current are sampled, and the UFIO is employed to achieve decoupling and reconstruction of each phase's inductor current. First, the converter's fault model is established, incorporating both power device faults and load uncertainty. Next, precise separation of each phase's inductor current information is accomplished through scenario-specific observer gain matrix design. Finally, adaptive load parameter estimation enables the recon- struction of per-phase inductor currents, facilitating subsequent fault detection and identification.
The simulation results demonstrate that the proposed observer accurately and efficiently tracks variations in the system state during both power transients and steady-state operation. Experimental validation is performed under three distinct scenarios, including no fault, single open-circuit fault (OCF2), and compound open-circuit fault (OCF23), with load jump conditions employed to assess diagnostic performance across different fault conditions. The experimental results indicate that the diagnostic results are free from false alarms under normal conditions. The single open-circuit fault flag is accurately set within two switching cycles (approximately 35 ms) after the occurrence of OCF2. Additionally, the composite open-circuit fault flag is accurately set within two switching cycles (approximately 38.4 ms) after the occurrence of OCF23, with no misdiagnosis in any other fault flags. Further comparison reveals that the OCF23 diagnosis time is approximately 37.7 ms without considering load adaptation, and there is a time difference of 0.7 ms compared with 38.4 ms considering load adaptation, which has a marginal impact on the overall rapidity of fault diagnosis. Although the introduction of load parameter adaptation slightly increases diagnosis time, it effectively addresses the issues of fault leakage and misdiagnosis caused by power transients, thereby improving diagnosis accuracy.
The simulation and experimental results show that: (1) The proposed fault diagnosis method utilizes the UFIO to reconstruct per-phase inductor currents, achieving the dynamic tracking of the inductor current state under uncertain load changes and input voltage fluctuations. (2) The proposed fault diagnosis method localizes the single open-circuit faults and composite open-circuit faults under the variable-load condition in less than two switching cycles. (3) The proposed fault diagnosis method is based on the design of system model construction and observer decoupling, which can be extended to other power electronic topology objects.
Keywords:Power devices, open circuit fault diagnosis, unknown fault input observer (UFIO), fault phase decoupling
中图分类号:TM46
DOI: 10.19595/j.cnki.1000-6753.tces.242229
国家自然科学基金资助项目(52077021)。
收稿日期 2025-05-15
改稿日期 2025-08-02
卢伟国 男,1977年生,博士,教授,研究方向为电能变换系统及控制技术、非线性电路理论及应用等。
E-mail: luweiguo@cqu.edu.cn(通信作者)
何 晴 女,2000年生,硕士研究生,研究方向为电能变换及其控制技术。
E-mail: 202311131174t@stu.cqu.edu.cn
(编辑 陈 诚)