图1 双转子混合动力系统结构
Fig.1 Structure of a dual-rotor hybrid powertrain
摘要 双转子永磁磁阻型(DRPMR)电机兼具高功率密度和优异的散热性能,在双转子混合动力驱动系统中展现出应用潜力。然而,在混合动力汽车复杂工况下,驱动系统内部电磁与机械耦合特性为其高性能控制带来了挑战。因此,该文提出一种双转子混合动力系统协调控制策略。首先,分析DRPMR电机的结构特点,并通过引入旋转隔离空间实现了系统机械解耦;然后,融合能量管理系统与DRPMR电机控制策略,设计了双转子混合动力系统协调控制策略。最后,通过特定工况仿真和多种工作模式实验验证,证明了所提控制策略的有效性。
关键词:双转子混合动力系统 双转子永磁磁阻型(DRPMR)电机 协调控制
近年来,随着全球的人均汽车保有量逐年递增,汽车的尾气排放、温室效应等环境问题受到社会的高度关注。混合动力汽车作为燃油汽车和电动汽车的过渡产品,因其对蓄电池的续航能力要求不高且在一定程度上可以提高燃油消耗率、减少尾气排放而日益受到学者的青睐[1]。混合动力汽车一般采用内燃机和蓄电池作为动力源,混合动力系统包括串联式、并联式以及混联式[2],其往往结构复杂,采用多组机械齿轮和电机实现转速解耦和转矩耦合,影响系统整体效率的同时增加了系统控制策略的复杂度。因此,结构更为简单的双转子混合动力系统逐渐成为混合动力系统领域的研究热点。
作为双转子混合动力系统的核心,双转子电机近些年来在技术上取得了显著进展[3-5]。目前,双转子电机设计面临的一些主要挑战为效率、可靠性和散热。永磁型双转子电机功率密度高,然而永磁体在高温下的退磁限制了其进一步发展。无刷双转子电机也是主要发展趋势之一,提高了系统可靠性并降低了内转子绕组的损耗,但也存在功率因数低和散热困难的问题[6]。为了解决散热困难的问题,有学者提出了磁阻型双转子电机,它具有优异的调速和散热性能,但其效率较低[7]。在此基础上,有学者将磁阻电机和永磁电机组合,提出了双转子永磁磁阻型(Dual Rotor Permanent Magnet Reluctance, DRPMR)电机,具有功率密度高、散热性能好等优点[8]。然而,DRPMRM混合动力系统复杂的电磁和机械耦合关系对其多工况下的高性能协调运行提出了挑战。
能量管理策略(Energy Management Strategy, EMS)是实现双转子混合电驱动系统协调运行,提高系统效率和燃油经济性的关键[9-10]。在综合考虑车辆当前运行状态、蓄电池组荷电状态(State of Charge, SOC)、发动机工作特性等因素的基础上,EMS通过协调双转子混合电驱动系统中的多个动力源,实现车辆需求功率在不同动力源之间的优化分配。文献[11]利用能量宏观表达法对感应型双转子混合电驱动系统进行建模,并讨论了不同运行工况下能量流动方式和EMS。在此基础上,文献[12]对比了感应型双转子混合电驱动系统和Toyota混合动力系统,提出了双转子混合电驱动系统设计和建模的基本思想,并讨论了其EMS。然而,二者都依赖静态工况假设,未解决动态环境下的实时控制问题。文献[13]提出了一种基于顺向动态规划的EMS,用于优化感应型双转子混合电驱动系统的功率分配。然而,其计算量大,无法实时应用,且易受到系统模型参数变化的影响,无法做到全局最优。文献[14]提出一种基于模糊逻辑控制的实时EMS,应用于磁场调制型双转子混合电驱动系统,其油耗与Toyota混合动力系统接近。然而,模糊控制规则的建立依赖专家经验,且由于未来行驶状况未知,无法得到能量分配的最优解。文献[15]分析了无刷双转子电机混合动力系统的工作模式和能量流动,并采用一种基于优化的EMS对系统功率进行分配。然而,通过对上述文献的分析发现,当前双转子混合动力系统的EMS在优化能力和实时性能方面存在局限,且优化过程主要聚焦于能量管理层,难以实现整体系统性能最优。
为进一步提高双转子混合动力系统的动态性能,当前研究在无传感器控制[16]、容错控制[17]、预测控制[18]等方向开展广泛探索。文献[19]通过磁场转矩预测模型和负载转矩观测器补偿了内外转子负载变化的影响,提高了系统动态性能。为了实现无刷双转子电机的解耦控制,文献[20]提出了一种双频电流驱动策略,通过修改电流变换矩阵和控制器结构来产生双频电流。文献[21]提出了一种基于双滑模观测器的无传感器控制,提高了系统容错能力和动态性能。然而,一方面,由于DRPMR电机内外电机结构不同,传统的控制策略无法实现DRPMR电机内外电机的解耦,且混合动力汽车工况切换引发的瞬间扰动对系统动态性能提出了更大的挑战。另一方面,EMS与电机控制策略的结合存在时间尺度失配的问题,EMS基于全局优化的s级决策与电机控制所需的ms级动态响应难以通过常规架构融合;且EMS以系统效率最优为导向的功率分配指令,与电机控制策略维持转矩稳定性的需求产生矛盾。
为了解决上述问题,本文提出一种双转子混合动力系统协调控制控制策略,结合DRPMR电机的结构特点和能量管理系统,确定DRPMR电机在不同运行工况下的功率协调控制策略。首先,从电磁耦合和机械耦合的角度分析DRPMR电机对混合动力系统运行的影响,通过引入旋转隔离空间实现了双转子混合系统的机械解耦;然后,在能量管理系统和DRPMR电机结构特点的基础上,确定了双转子电机功率转换控制策略;最后,搭建了双转子混合动力系统的仿真模型和基于dSPACE的硬件在环系统实验平台,分别通过特定工况仿真和多种工作模式的实验,验证了系统控制策略的有效性。
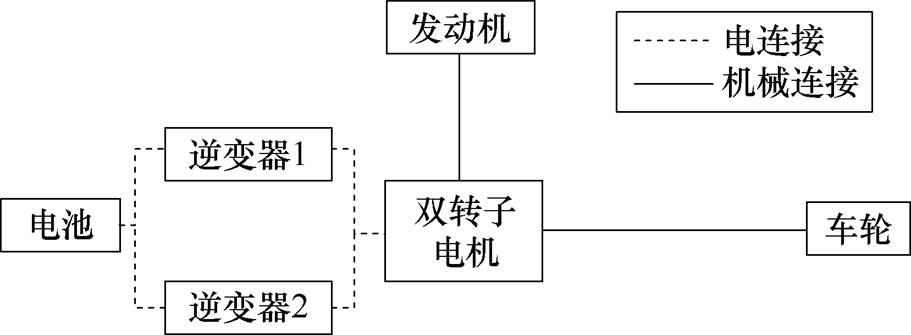
双转子电机是双转子混合动力系统的核心部件,取代了传统行星齿轮结构,具有功率密度高和可靠性强等优势,双转子混合动力系统的整体结构如图1所示。
图1 双转子混合动力系统结构
Fig.1 Structure of a dual-rotor hybrid powertrain
本文的研究对象为基于DRPMR电机的双转子混合动力系统。其中,DRPMR电机由定子、外转子和内转子构成,内转子和外转子分别在电机的两端伸出一个机械端口,分别与内燃机和减速器相连。定子的三相集中绕组通过H桥逆变器与直流电源相连。内转子三相分布绕组则经集电环引出,通过三相全桥逆变器与直流电源相连。外转子的磁轭部分为外气隙磁场回路与内气隙磁场回路的共用部分,外转子在磁轭部分内嵌有四块切向充磁的永磁体。DRPMR基本结构框图及功率流动如图2所示。图中,w1为内转子转速,w2为外转子转速,Tin为内燃机实际输出转矩,Tload为负载转矩,TE1为内电机电磁转矩,TE2为外电机电磁转矩。
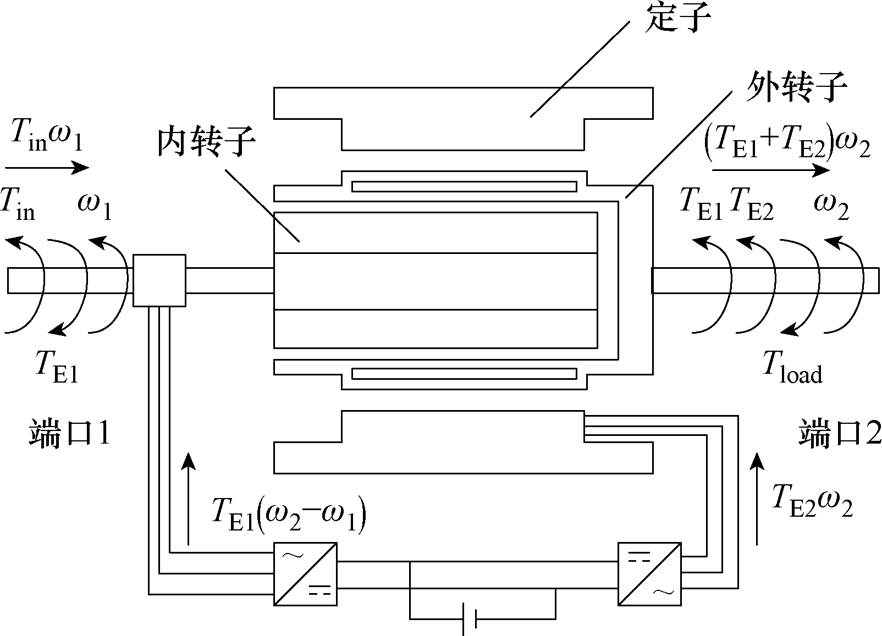
图2 DRPMR结构及原理示意图
Fig.2 Schematic diagram of DRPMR machine structure and principle
根据图2的功率流动方向可知,发动机输出功率为Tinw1,蓄电池组的输出功率为(TE1+TE2)w2-TE1w1。当(TE1+TE2)w2>TE1w1时,蓄电池组向外输出电能,否则将处于充电状态;系统稳定运行时,内电机电磁转矩TE1与内燃机转矩Tin相等。内燃机通过TE1将功率传递至车轮,实现了内燃机运行情况与负载的解耦,有利于内燃机高效运行。
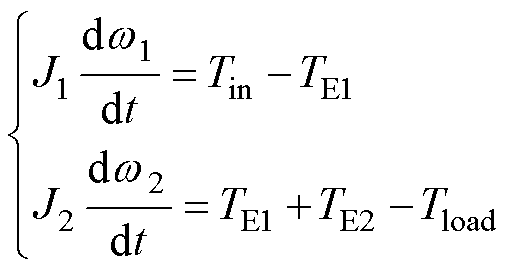
当系统状态发生变化时,外转子转速w2由TE1、TE2以及Tload三者共同作用产生。内转子转速w1由Tin与TE1共同作用产生。根据其瞬态受力情况,可以得到内外转子的运动方程组,有
 (1)
(1)
式中,J1为内转子输入轴转动惯量;J2为外转子输出轴转动惯量。
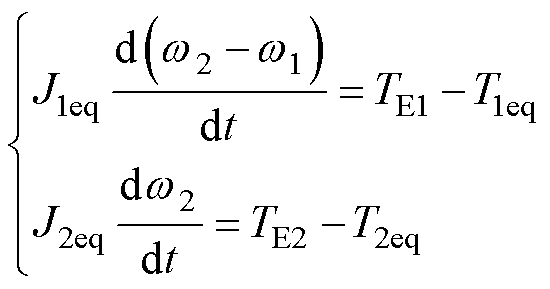
式(1)表明,内外转子的运动状态相互影响,存在机械耦合,同时由于内外电机磁场统一,磁链存在相互耦合,TE1、TE2之间存在相互影响。因此,引入一个旋转的隔离空间,其转速与外转子转速相同,以实现内外电机运动方程的解耦。在旋转隔离空间内,式(1)需要考虑非惯性转矩,通过整理,可以得到
 (2)
(2)
其中
式中,J1eq为内电机的等效转动惯量;J2eq为外电机的等效转动惯量;T1eq为内电机的等效负载转矩;T2eq为外电机的等效负载转矩。通过上述分析,将DRPMRM的控制转化为永磁型内电机、永磁磁阻型外电机之间的协调控制。
此外,内外电机间由于没有电磁隔离,定子与内转子绕组间存在磁链耦合。但考虑到内、外绕组互感的值与自感相比较小,电磁耦合较弱[22],本文为了简化控制,忽略内、外绕组互感;同时,由于定子的各相绕组为集中绕组,定子绕组之间的互感远小于绕组自感,进而可以忽略定子绕组之间的互感。
通过第1节的分析可知,在忽略绕组互感和引入旋转的隔离空间后,可以实现DRPMR电机的解耦。本节介绍了一种双转子混合动力系统功率协调控制策略,基于能量管理系统和DRPMR电机的结构特点,实现了双转子混合动力系统的高效协调控制,其控制框图如图3所示。
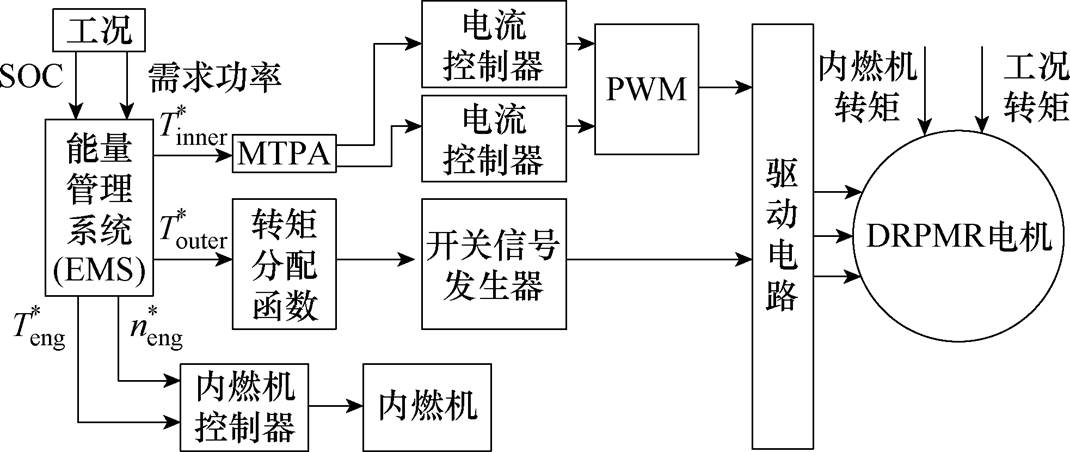
图3 双转子混合动力系统协调控制框图
Fig.3 Diagram of coordination control strategy for dual-rotor hybrid powertrain
当汽车运行时,能量管理系统(EMS)会根据当前工况下的需求功率和电池SOC决定内燃机和电池组的功率的分配。当电池电量处于合理范围内且驱动功率需求较低时,内燃机不工作,驱动功率主要由DRPMR电机中的外电机提供;当电池电量超过下限值或需求功率较高时,内燃机提供主要的驱动功率,双转子电机动态调节实现输出转矩与需求转矩的平衡。
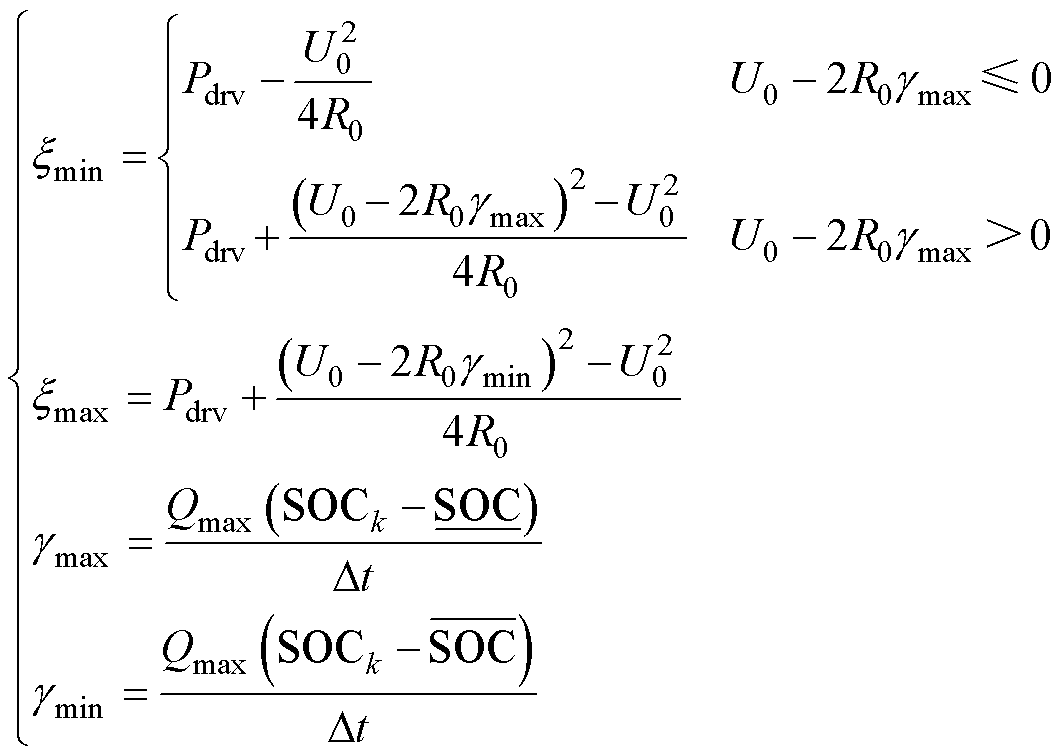
基于非线性模型预测控制(Nonlinear Model Predictive Control, NMPC)的能量管理系统控制框图如图4所示。通过求解优化目标,可以得到预测范围内的最优功率分配。为了减少控制的复杂度,图4中的系统约束可以通过公式推导化简至变量Peng的不等式约束,可以表示为
 (3)
(3)
其中
 (4)
(4)
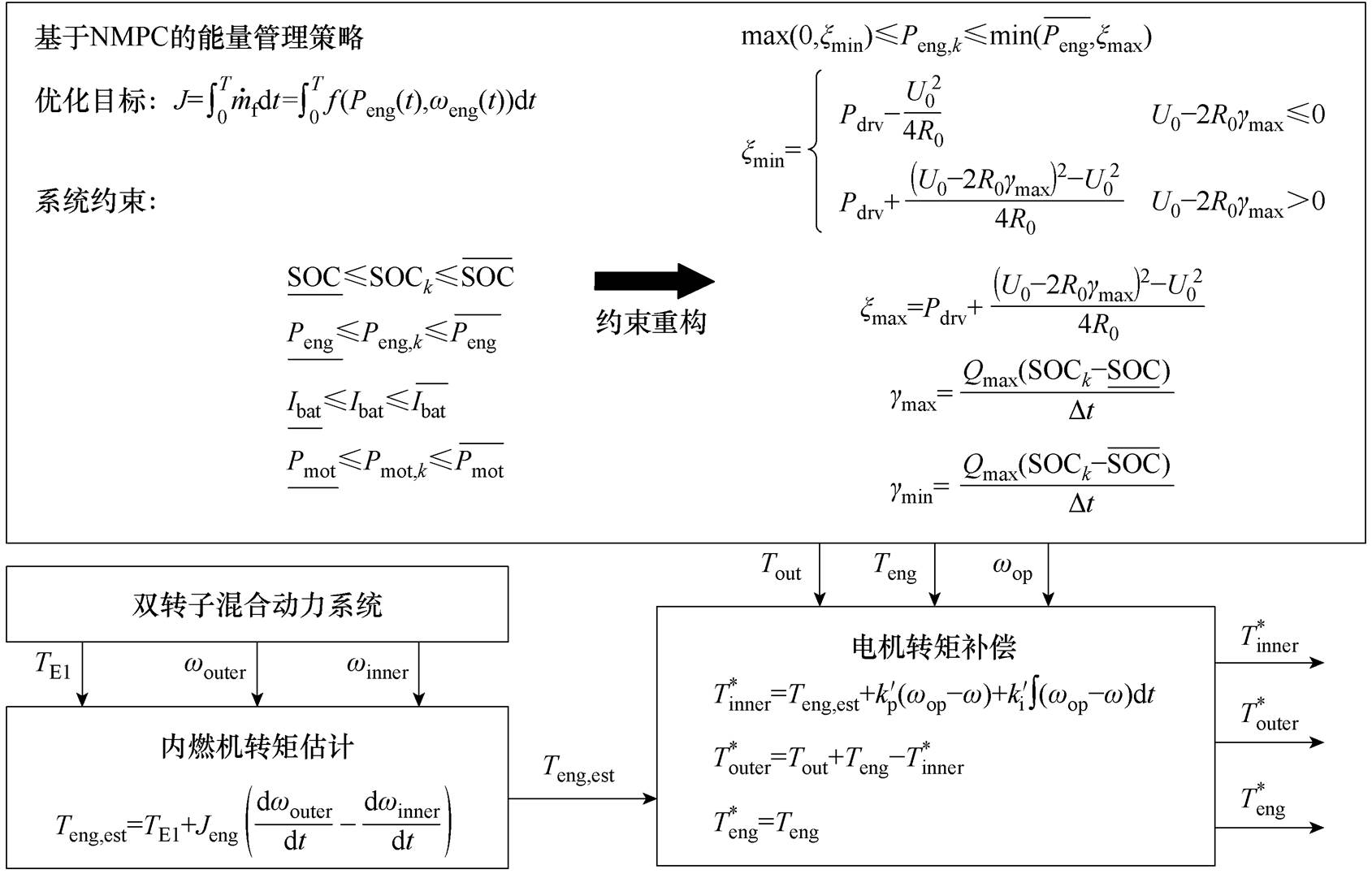
图4 双转子混合动力系统能量管理系统控制框图
Fig.4 Diagram of energy management system for dual-rotor hybrid powertrain
式中,xmin和xmax为中间变量;Peng,k和SOCk分别为第k个控制周期下的内燃机功率和蓄电池SOC;Pdrv为需求功率;U0为蓄电池开路电压;R0为蓄电池内阻;Qmax为蓄电池最大容量; 和
和 分别为括号内变量的上限值和下限值;Dt为控制周期间隔。
分别为括号内变量的上限值和下限值;Dt为控制周期间隔。
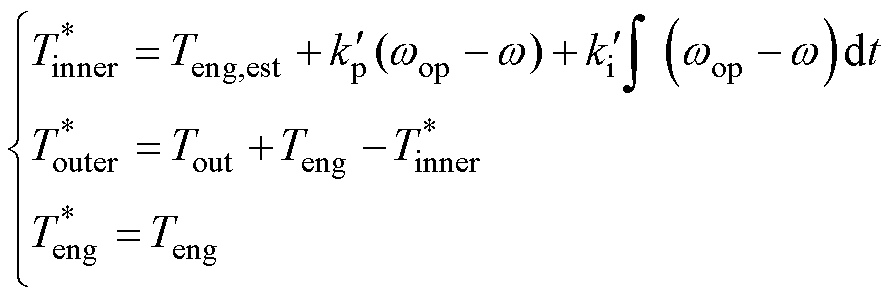
内燃机采用恒定工作点模式控制,实现了内燃机起动后快速固定在最优工作点,降低了工作过程中的燃油消耗量。然而,内燃机转速调节需要额外的功率且内燃机的转矩输出存在纹波和滞后,这会导致动力系统输出轴转矩出现波动和动力缺失。此外,能量管理策略的优化目标以燃油经济性为主,电机控制层则以维持电机输出转矩稳定为目标,这会使得能量管理策略输出的参考转矩无法满足汽车动态性能要求。因此,利用外电机的快速响应特性对输出轴转矩进行补偿,电机转矩补偿为
 (5)
(5)
式中, 和
和 分别为基于NMPC的能量管理系统输出的给定外电机转矩和内燃机转矩;
分别为基于NMPC的能量管理系统输出的给定外电机转矩和内燃机转矩; 和
和 分别为内燃机最佳转速和当前转速;Teng,est为内燃机估计转矩;
分别为内燃机最佳转速和当前转速;Teng,est为内燃机估计转矩; 和
和 为PI控制器系数;
为PI控制器系数; 、
、 和
和 分别为能量管理系统最终输出的内电机参考转矩、外电机参考转矩和内燃机参考转矩。
分别为能量管理系统最终输出的内电机参考转矩、外电机参考转矩和内燃机参考转矩。
由图3可知,DRPMR电机控制器根据能量管理系统的转矩分配结果,确定内、外电机参考转矩。然而,由于能量管理层与电机控制层的时间尺度存在差异,需要对能量管理层和电机控制层的输出进行协调。能量管理层作为规划层,其输出首先作为被控对象的输入。在电机的控制所需的时间周期下,电机控制层对能量管理层输出的参考转矩进行插值,然后输出至被控对象,实现双转子混合动力系统的实时动态控制。
DRPMR电机的控制层包括内电机最大转矩电流比控制和外电机直接瞬时转矩控制。内电机根据其数学模型确定最小损耗下的给定电流;外电机则根据转矩分配函数,分别确定外电机三相输出给定转矩。内电机控制器根据能量管理系统的给定内电机转矩对dq轴电流重新分配,实现了内电机最小损耗控制,提高了电机运行效率。其分配公式为
 (6)
(6)
式中, 和
和 分别为d、q轴电流参考值;
分别为d、q轴电流参考值; 为永磁体磁链;Ld和Lq分别为d、q轴电感;np为极对数;
为永磁体磁链;Ld和Lq分别为d、q轴电感;np为极对数; 为能量管理系统输出的内电机参考转矩。
为能量管理系统输出的内电机参考转矩。
外电机则根据外转子当前位置和转矩分配函数确定换相期间的A相、B相和C相参考转矩。转矩分配函数选择立方型分配函数,其表达式为
 (7)
(7)
其中
 (8)
(8)
 (9)
(9)
式中, 为外电机参考转矩;qon、qoff、qov、q分别为开通角、关断角、相重叠角和外转子位置。
为外电机参考转矩;qon、qoff、qov、q分别为开通角、关断角、相重叠角和外转子位置。
以A、B相换相过程为例,换相过程中其参考转矩分别为
 (10)
(10)
 (11)
(11)
换相过程结束后,A相参考转矩为零,B相参考转矩为 。然后,通过外电机转矩观测器实时对比参考转矩与实际转矩,并输出相应的滞环控制信号。滞环控制信号输入开关信号发生器,通过判断各相的通断时间,产生相应的PWM控制信号。然而,外电机的外转子中内嵌有永磁体,这一特殊结构导致气隙磁链中存在反向磁链。因此,不同于传统的双凸极电机控制,在外电机转矩控制时需要同时考虑开关管的通断时间以及各相电流的方向,以保证定子电流所产生磁场的方向与永磁体产生磁场的方向相同,达到增强外电机效率的目的。
。然后,通过外电机转矩观测器实时对比参考转矩与实际转矩,并输出相应的滞环控制信号。滞环控制信号输入开关信号发生器,通过判断各相的通断时间,产生相应的PWM控制信号。然而,外电机的外转子中内嵌有永磁体,这一特殊结构导致气隙磁链中存在反向磁链。因此,不同于传统的双凸极电机控制,在外电机转矩控制时需要同时考虑开关管的通断时间以及各相电流的方向,以保证定子电流所产生磁场的方向与永磁体产生磁场的方向相同,达到增强外电机效率的目的。
因此,本文设计了一种针对永磁磁阻型外电机的开关信号发生器,用来判断外电机电流的通断,它由新周期信号发生器和开通正负判定两部分组成。前者通过外转子的实际运行位置与电流通断周期45°取余,其结果与开通、关断角进行对比,进而确定电流通断。后者则通过电机实际位置与电流正负周期90°取商来确定电流的方向。
本节构建了基于真实实验平台参数的仿真模型,通过市郊驾驶循环(Extra Urban Driving Cycle, EUDC)和联邦测试程序75(Federal Test Procedure 75, FTP75)标准工况验证了双转子混合动力系统协调控制的有效性,并分析了DRPMR电机在不同运行工况下的功率流动方式。
EUDC测试工况车速变化较为平稳,用于模拟较为畅通的郊区路况。在整个循环工况中,发动机在工作期间除了起动、熄火的暂态过程均工作于最佳效率点。由于EUDC标准测试工况时间较长,本节将标准测试工况等比例缩减为适合电机时间尺度的测试工况。
图5展示了在所设计的测试工况下,DRPMR电机的运行状态和给定的转矩及功率。驱动轴转速,即外转子给定转速如图5a所示。发动机采用恒定工作点控制,其给定转速如图5d所示。EUDC工况下内、外电机的工作状态分别如图6、图7所示。分析可知,内、外电机均按照给定工况运行。

图5 EUDC工况下的系统给定工作状态
Fig.5 Specified system conditons under EUDC
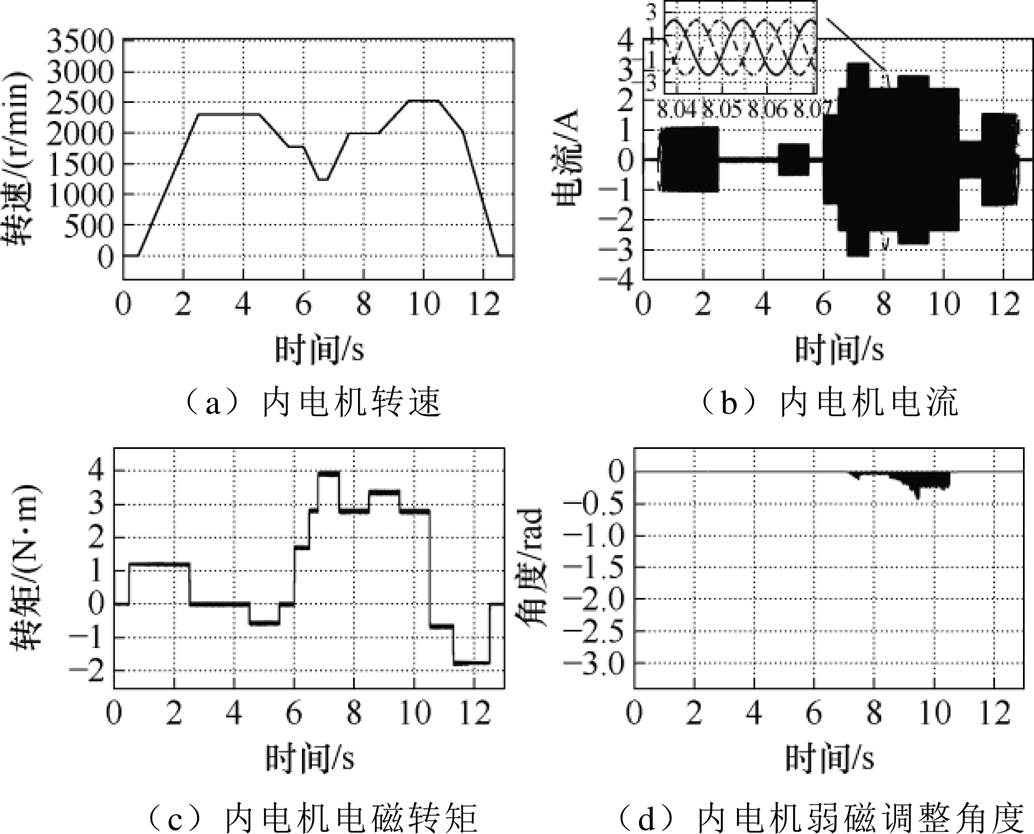
图6 EUDC工况下内电机的工作状态
Fig.6 Operating conditions of inner machine under EUDC
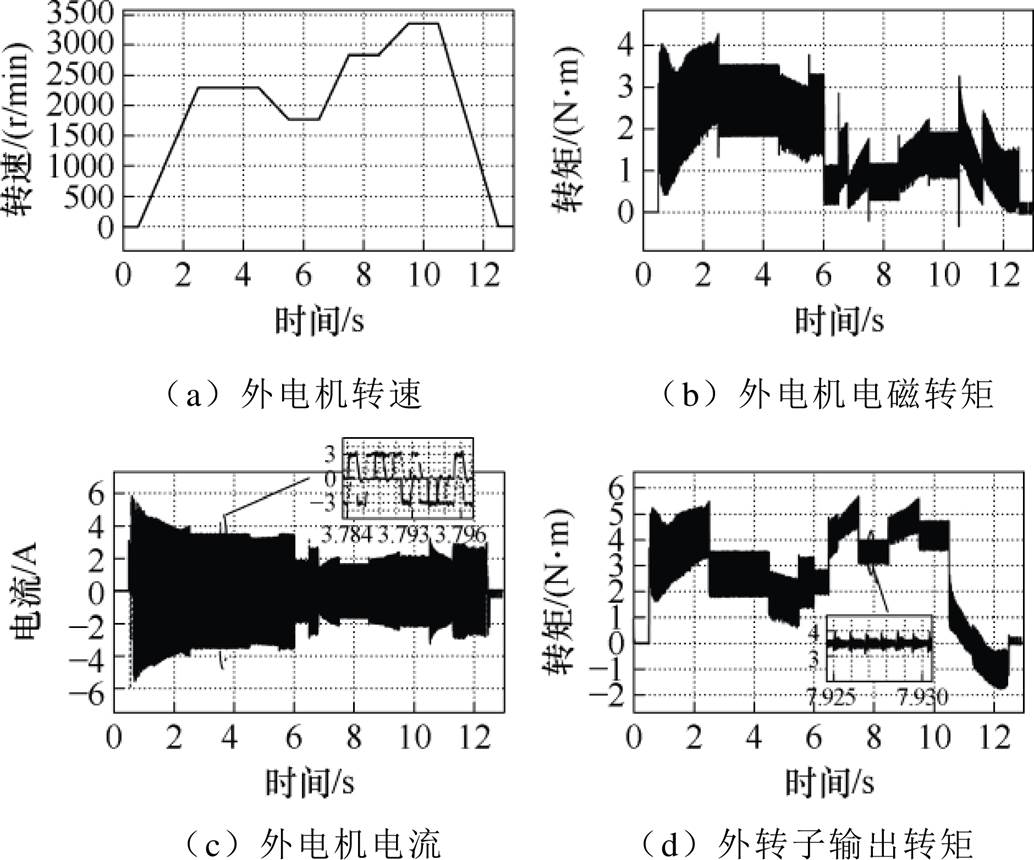
图7 EUDC工况下外电机的工作状态
Fig.7 Operating conditions of outer machine under EUDC
内、外电机共同贡献外转子的输出转矩,如图7所示,外转子输出转矩与需求转矩保持一致。EUDC工况下排放与功率流动如图8所示。由功率分析可知,双转子混合动力系统在所提出的功率协调控制下可以实现各部件的灵活运行并保持功率守恒。图9展示了在EUDC工况电池组和发动机的工作状态下,由图9可见,电池SOC保持在合理的运行范围内,电池输出电压稳定在电机额定电压,发动机运行于高效区。
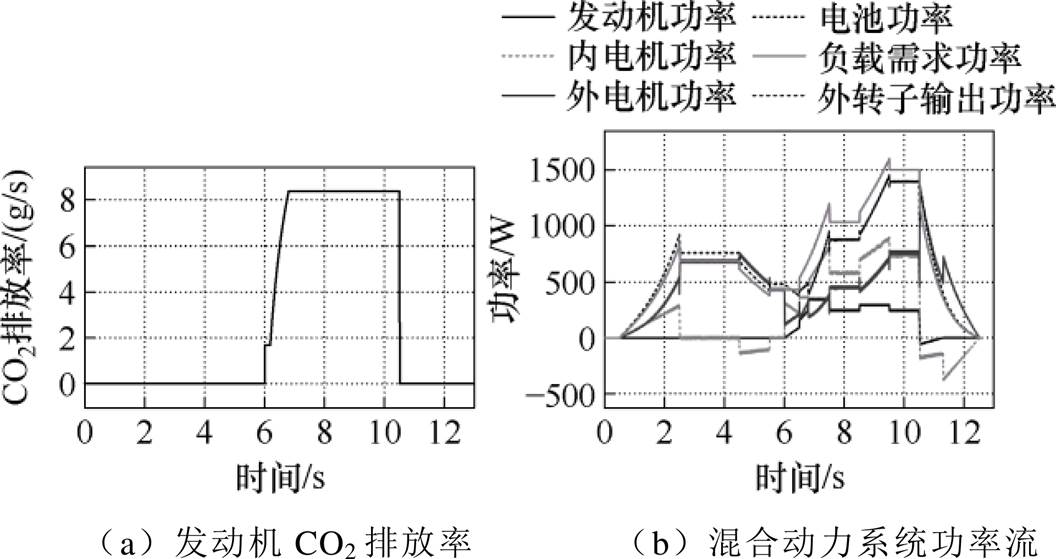
图8 EUDC工况下排放与功率流动
Fig.8 Emissions and power flow under EUDC
此外,当驱动轴需求转速下降时,外电机工作于回馈制动模式,如图7d所示,向蓄电池充电,内电机则根据内、外转子的转速差调整工作状态。如图9a所示,当外电机工作于回馈制动模式,系统SOC下降速率变慢。
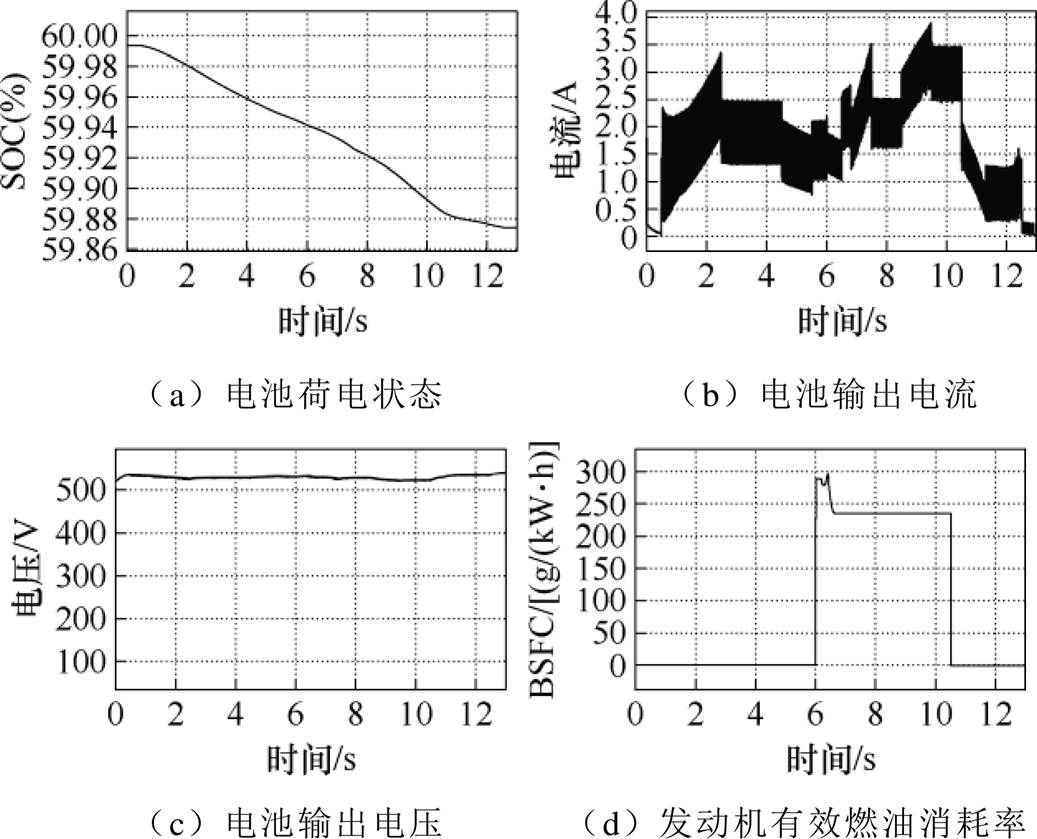
图9 EUDC工况下电池组与发动机的工作状态
Fig.9 Work conditions of battery and engine under EUDC
为了验证所提功率协调控制策略的燃油经济性,本文选取了动态规划和基于规则的控制策略进行对比,测试工况为标准EUDC工况,其结果见表1。其中,动态规划可以获得离线最优解,通常作为判断在线控制策略燃油经济性的重要指标。
表1 EUDC工况下的燃油消耗量对比
Tab.1 Fuel consumption comparison under EUDC driving cycle
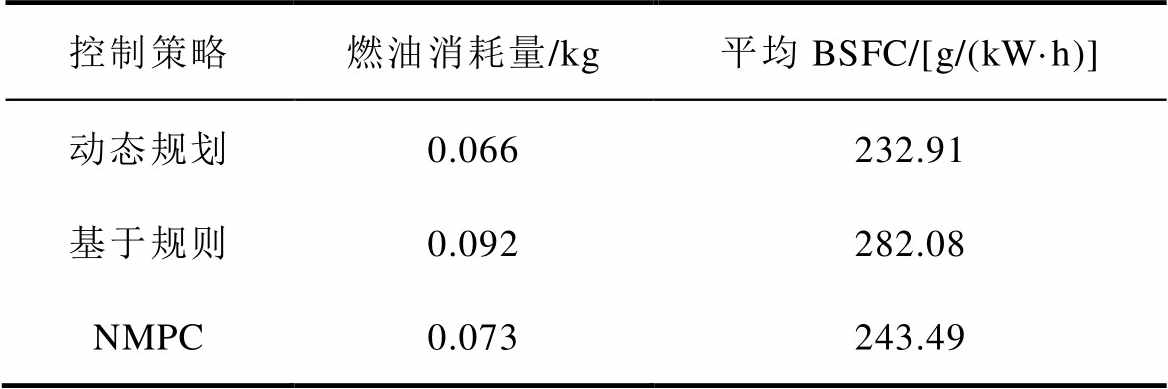
控制策略燃油消耗量/kg平均BSFC/[g/(kW·h)] 动态规划0.066232.91 基于规则0.092282.08 NMPC0.073243.49
表1中,基于动态规划的方法燃油消耗量最低,NMPC次之,基于规则的最高。相较于基于规则的控制策略,本文所提策略油耗降低20.65%。由于对内燃机工作点的优化,所提策略的平均有效燃油消耗率(Brake Specific Fuel Consumption, BSFC)为243.49g/(kW·h),相较于基于规则的控制策略下降13.68%。
FTP75工况常用于模拟车辆起、停较为频繁的城市运行工况,对双转子混合动力系统的暂态性能要求较高。与3.1节的处理类似,FTP75也被设计为适合电机时间尺度仿真的运行工况。图10展示了工况的给定转速、需求转矩和功率,以及发动机需求转速。
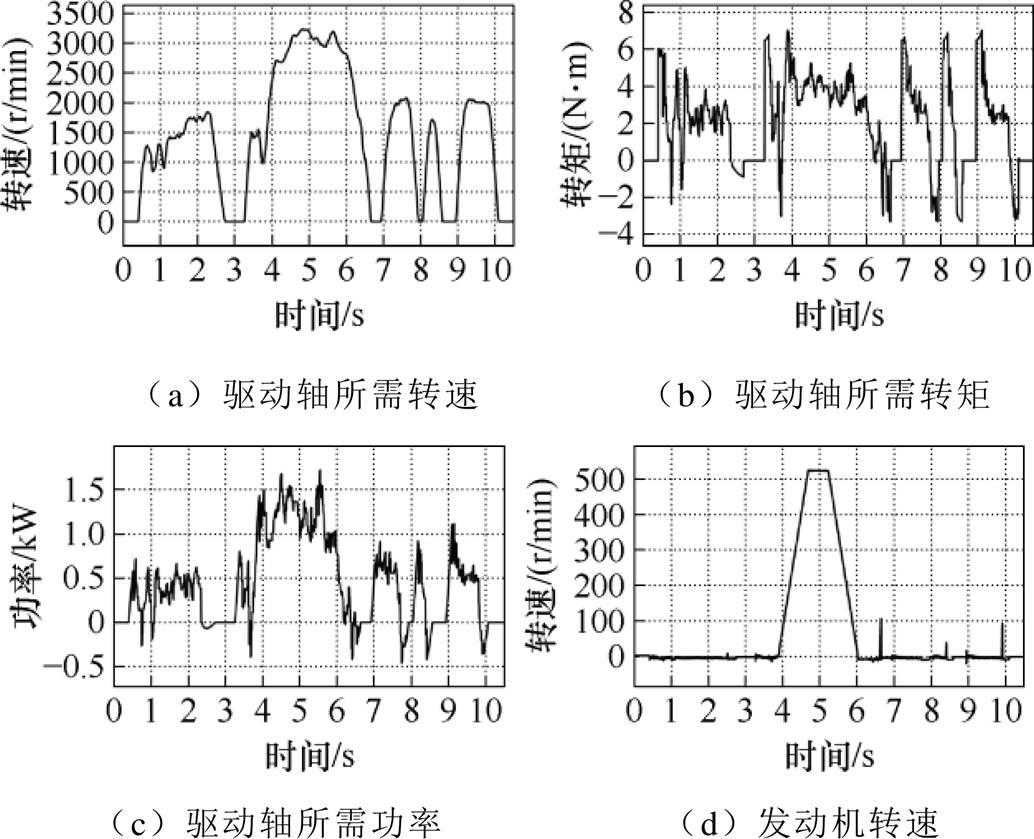
图10 FTP75工况下的系统给定工作状态
Fig.10 Specified system conditons under FTP75
图11、图12展示了指定工况下,内、外电机的工作状态。图13展示了电池组和发动机的工作状态,电池电压稳定于540 V左右;相较于EUDC工况,FTP75多为低速工况,发动机需求转速较低,平均燃油消耗率上升。
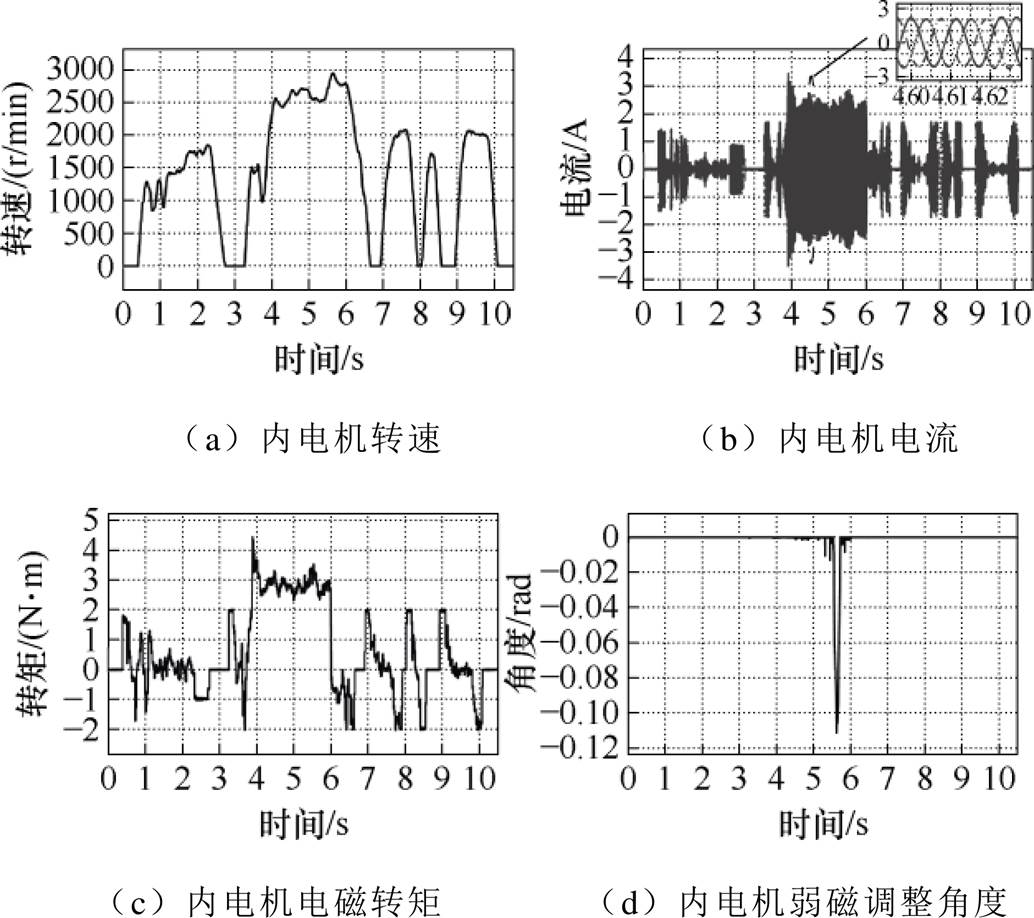
图11 FTP75工况下内电机的工作状态
Fig.11 Working conditions of inner machine under FTP75

图12 FTP75工况下外电机的工作状态
Fig.12 Workng conditions of outer machine under FTP75

图13 电池组和发动机的工作状态
Fig.13 Work conditions of battery and engine
在减速工况下,如图12c所示,外电机在需求转速下降时工作于回馈制动模式,向蓄电池充电。如图13a和图13b所示,当外电机工作于回馈制动模式时,系统SOC下降速率变慢,且维持在合理范围内,蓄电池电流为负。
FTP75工况下的燃油消耗量对比见表2。基于动态规划的方法燃油消耗量最低,NMPC次之,基于规则的最高。相较于基于规则的控制策略,本文所提策略油耗降低12.39%。FTP75工况下,所提策略的平均BSFC为303.49 g/(kW·h),相较于EUDC工况上升,这是由于FTP75工况下需求转速和转矩频繁变化的结果,相较于基于规则的控制策略下降3.06%。
表2 FTP75工况下的燃油消耗量对比
Tab.2 Fuel consumption comparison under FTP75 driving cycle
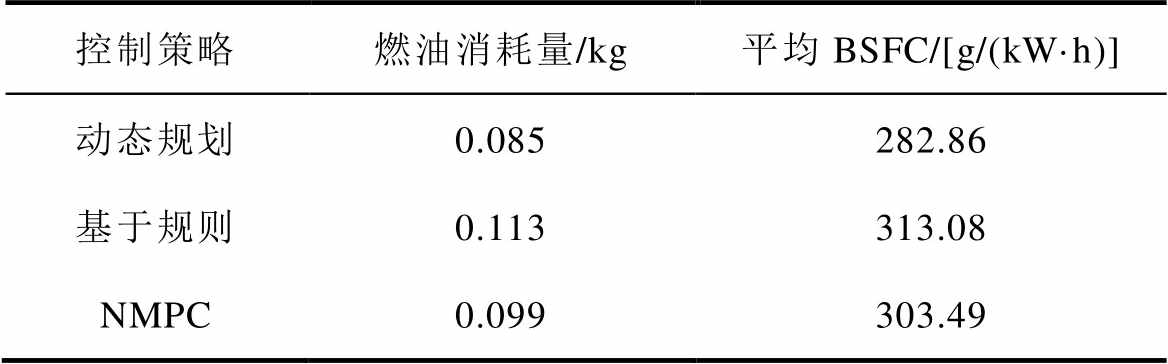
控制策略燃油消耗量/kg平均BSFC/[g/(kW·h)] 动态规划0.085282.86 基于规则0.113313.08 NMPC0.099303.49
图14展示了FTP75工况下的排放与功率流动。相较于EUDC,FTP75工况存在更多的暂态过程与功率波动。如图14b所示,所提功率协调控制策略依旧保持了良好的功率协调能力和动态响应能力,并实现了双转子混合动力系统的能量守恒。
综上所述,在不同测试工况下,针对双转子混合动力系统所提功率协调控制策略均展示出良好的控制性能,实现了系统的功率守恒和各部件的灵活运行,提高了双转子混合动力系统的效率。
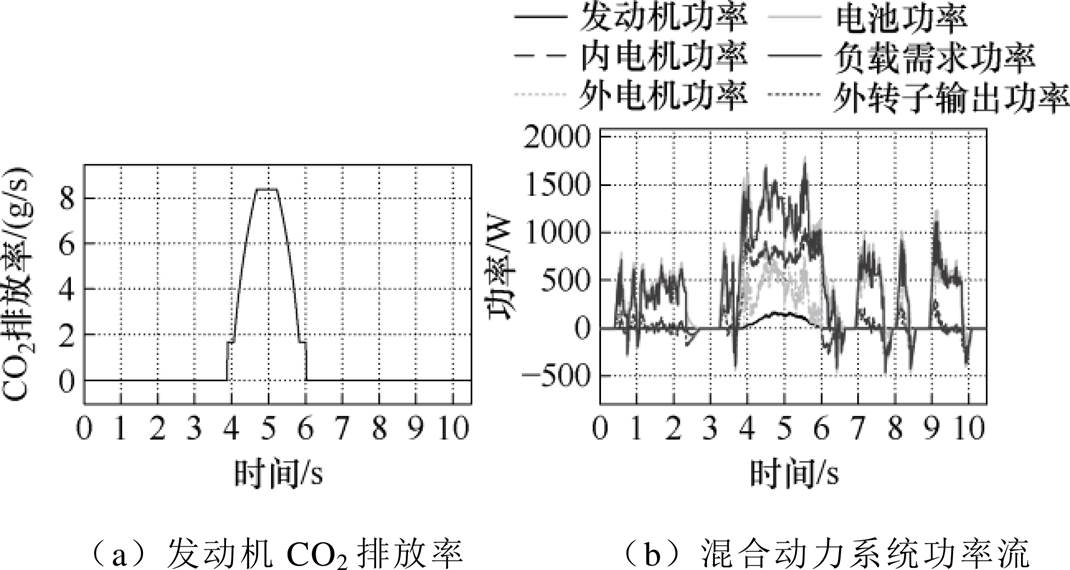
图14 FTP75工况下排放与功率流动
Fig.14 Emissions and power flow under FTP75
本节搭建了基于DRPMR电机的实验测试平台,主要包括传动部分和控制部分。传动部分主要由DRPMR电机和两台异步电机构成,异步电机分别模拟发动机和车轮负载;其控制部分由工控机、dSPACE(DS1103)、H桥逆变器、矢量控制变频器构成,如图15所示。实验验证主要包括纯电动工作模式、发动机单独工作模式和混合驱动模式。
在纯电动工作模式下,只有外电机工作,发动机和内电机均不工作,常出现在起动及低速运行。本小节将分别从起动和调速两个过程来验证纯电动工作模式。

图15 双转子混合动力系统实验平台
Fig.15 Experimental platform of dual-rotor powertrain
设定双转子混合动力系统驱动桥的起动转速为1 000 r/min,得到如图16所示的起动响应波形。外电机转速快速上升且稳定于给定值,外电机三相电流保持稳定,且导通顺序和导通方向与永磁体励磁方向相同。
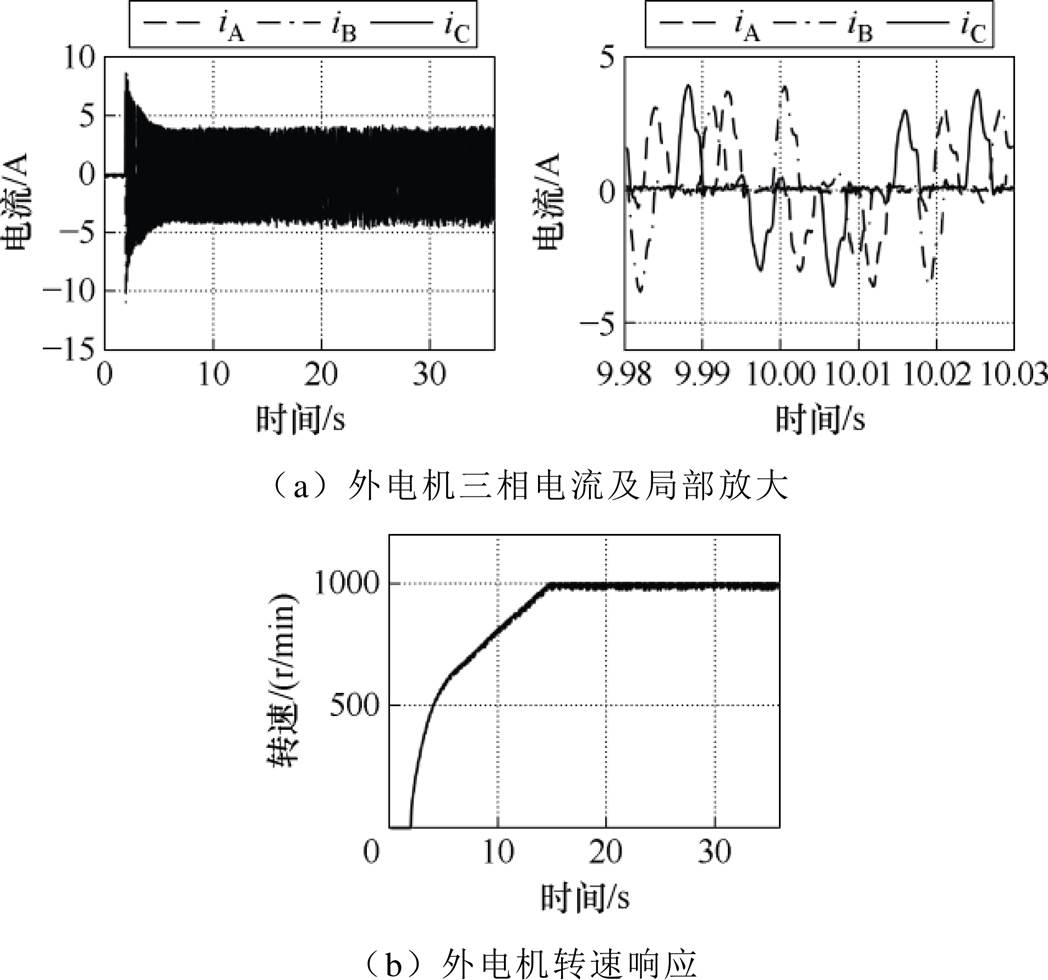
图16 起动模式下的系统状态
Fig.16 System status in start-up mode
设定双转子混合动力系统驱动桥的调速过程为从300 r/min—1 000 r/min—300 r/min,每间隔100 r/min调速一次,得到如图17所示的调速响应波形。由图可知,双转子混合动力系统在调速过程中,转速响应快,外电机三相电流基本保持稳定,且导通顺序和导通方向满足所设定的通电顺次。
在发动机工作模式下,只有发动机提供动力,DRPMR电机工作于发电状态。由于实验条件的限制,本实验中利用变频起动的三相异步电机模拟发动机。实验结果如图18~图20所示。
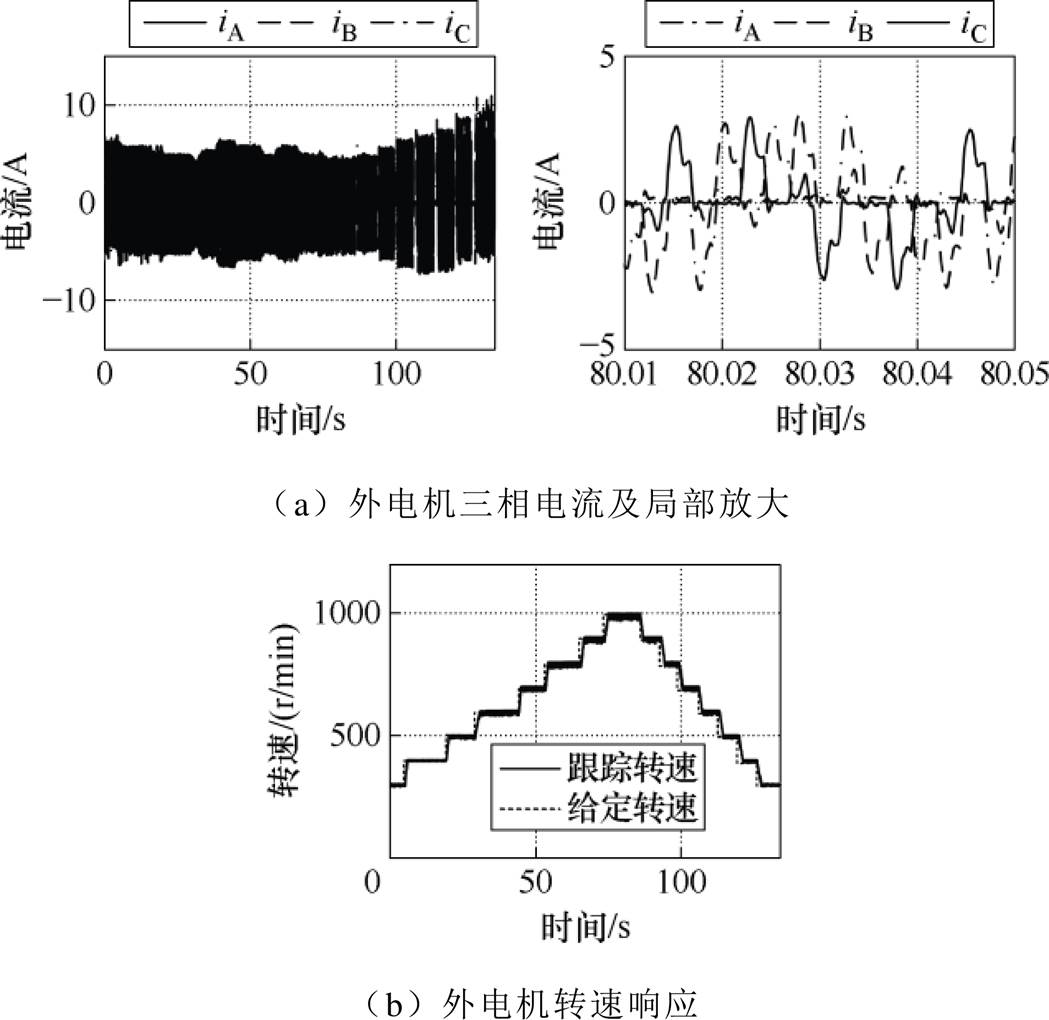
图17 调速模式下的系统状态
Fig.17 System status in speed regulation mode
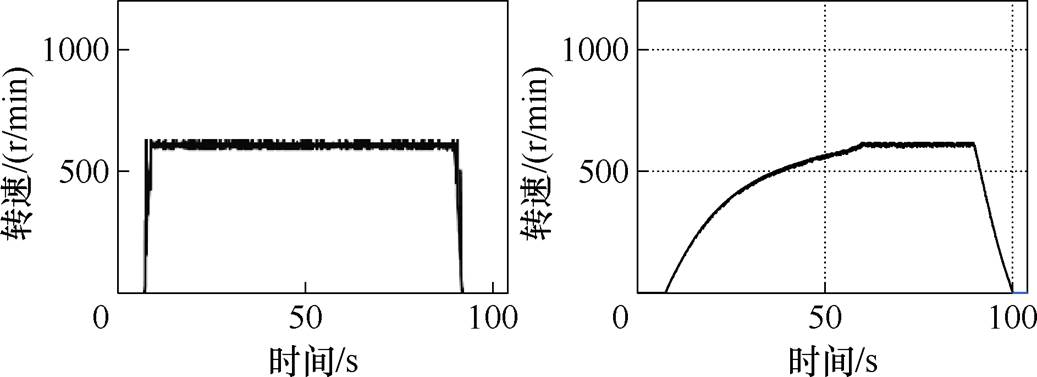
图18 内外转子转速响应
Fig.18 Speed response of inner rotor and outer rotor
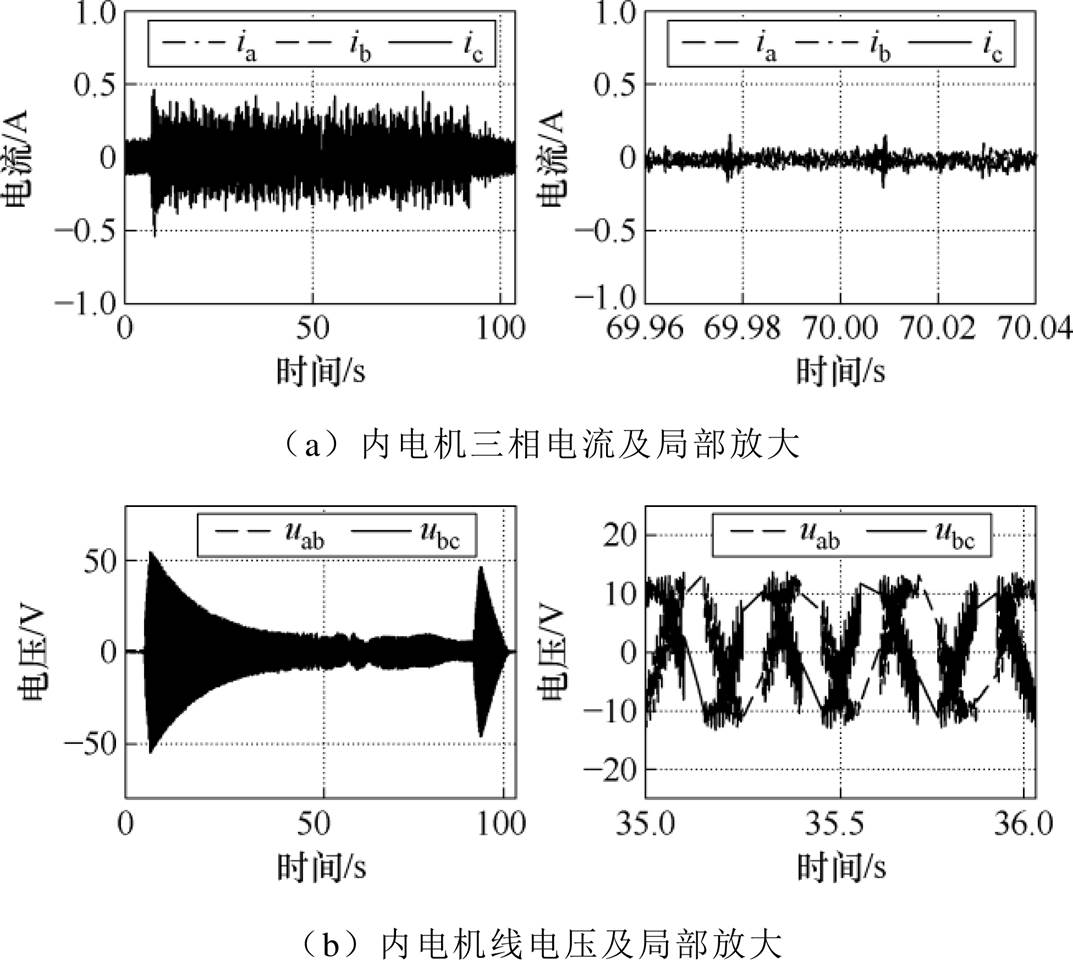
图19 内电机电压电流、线电压电流波形
Fig.19 Waveforms of inner machine current and voltage
如图18所示,在发动机工作模式下,内转子与原动机相连,内转子转速于10 s快速上升并稳定运行于600 r/min;外转子转速在内转子旋转磁场的作用下也于10 s时开始上升,并随着内外转子转速差的减少加速度逐渐变小,最终在65 s左右与内转子转速差为零。
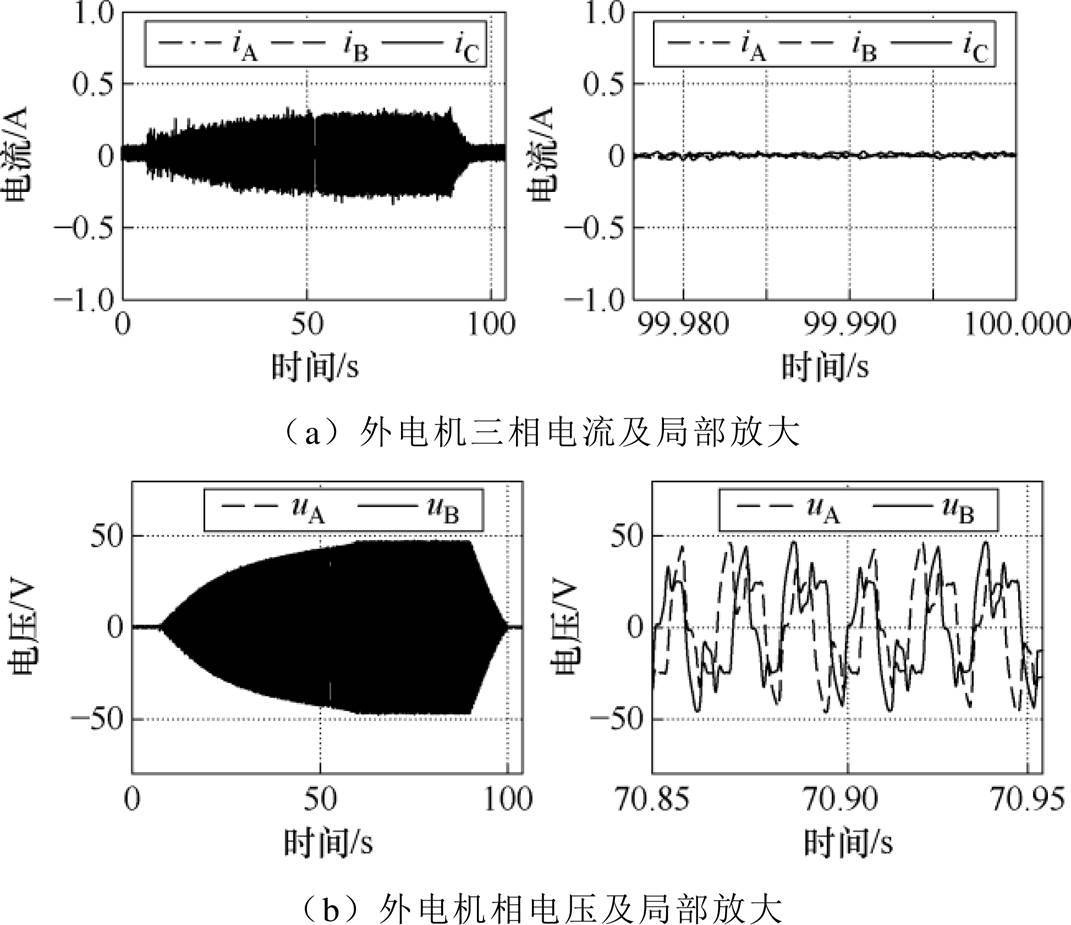
图20 外电机电流、线电压波形
Fig.20 Waveforms of outer machine current and voltage
图19a、图19b分别展示了内电机的电流、线电压波形,此时内电机绕组中很小的电流是由于内燃机拖动内转子转动,闭合绕组切割磁力线所产生的感应电流,此时内电机工作在发电状态下,线电压为发电电压,各线电压之间互差120°电角度,且随着转速差的减小下降。
图20a、图20b分别展示了外电机电流、相电压波形,外转子旋转时,磁场切割定子绕组,外电机工作在发电状态,随着外转子转速的上升,外电机线电压及相电流上升并最终稳定。
在混合动力工作模式下,内燃机和DRPMR电机同时工作,双转子电机根据给定运行情况和内燃机工作状态调整运行模式。
在实验过程中,首先起动变频器控制模拟发动机的三相异步电机逐渐加速并稳定运行于600 r/min,待外转子的转速与内转子转速同步后,起动外电机。实验结果如图21~图23所示。
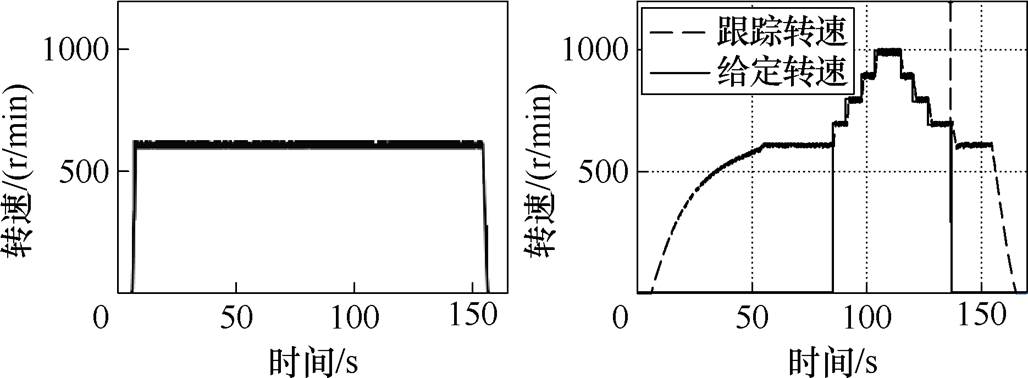
图21 内外转子转速响应
Fig.21 Speed response of inner rotor and outer rotor
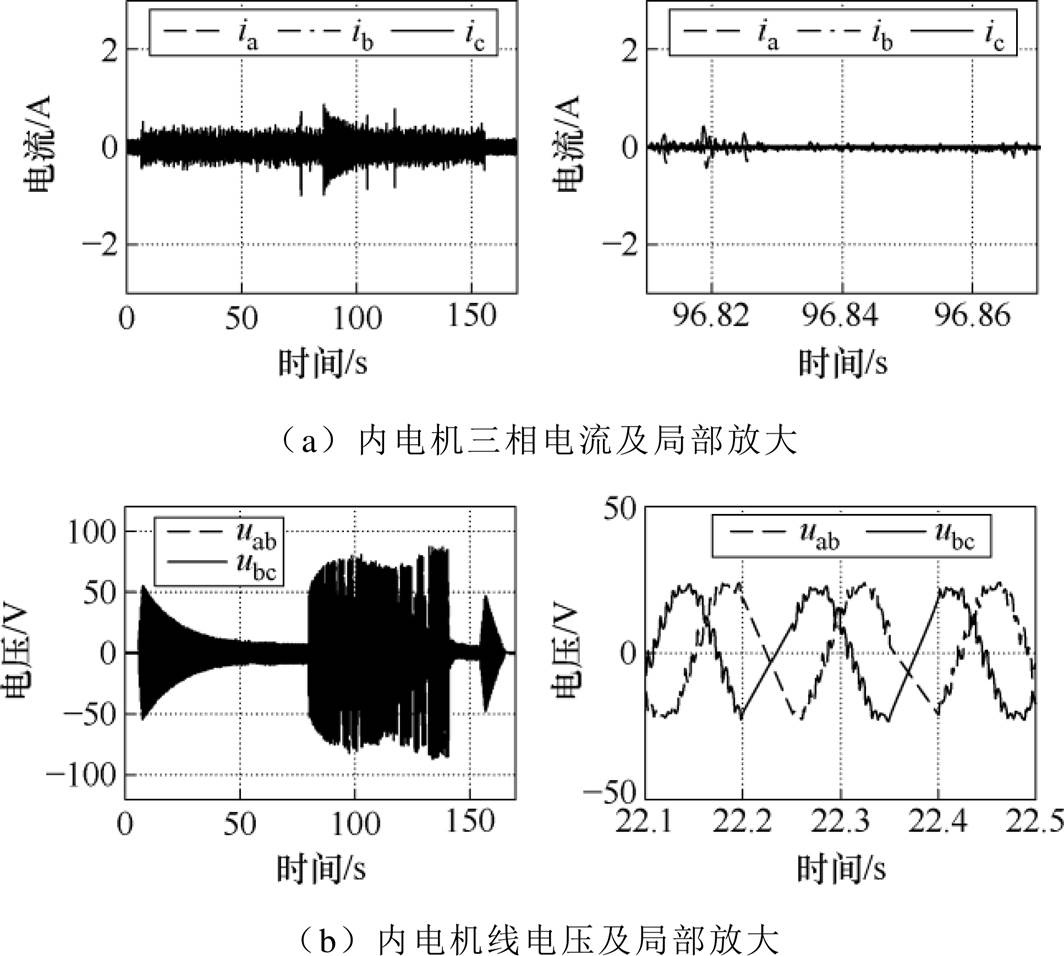
图22 内电机相电流和相电压波形
Fig.22 Waveforms of inner machine current and voltage

图23 外电机相电流和相电压波形
Fig.23 Waveforms of outer machine current and voltage
由图21可知,在发动起起动以后,外转子转速与发动机单独工作模式相同,先逐步稳定于内转子转速;然后,起动外电机调速,实现外转子与内燃机转速的解耦,使内燃机独立于汽车工况工作在最佳效率区。
图22展示了内电机首先工作在发电状态,绕组中很小的电流是感应电流。当外转子转速上升至与内转子相同时,内电机线电压稳定;当外电机起动后,外转子转速逐渐上升并大于内转子转速,内电机线电压继续增大,并随着转速的稳定而稳定;图23为内燃机起动后,外电机首先不工作,电流为零,电压为感应发电电压;当外转子转速稳定后,外电机起动并工作于电动状态,电流和相电压上升。
为了验证所提出功率协调控制策略的功率分配结果和燃油经济性,构建了能量实验平台,如图24所示。其中,stm32H743作为上层控制芯片搭载了能量管理算法,并将转矩分配结果通过CAN通信传递至dSPACE模型中,进而实现双转子混合动力系统的控制。选取FTP72作为测试工况,初始SOC设置为0.7,并与基于动态规划和基于规则的控制策略进行对比。
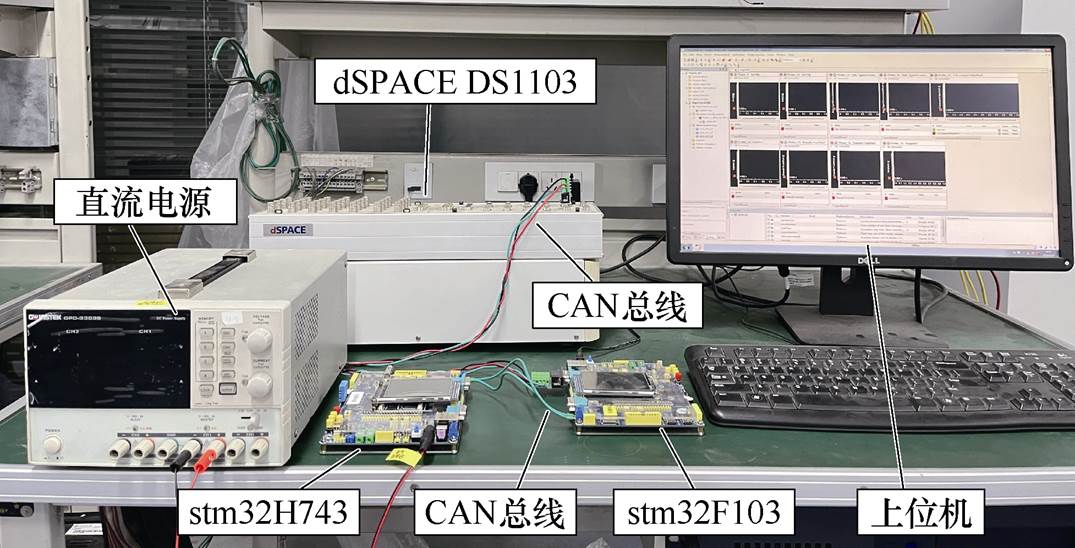
图24 能量管理策略实验平台
Fig.24 Experimental platform of energy management
图25为FTP72测试工况下,双转子混合动力系统SOC曲线。如图所示,所提出的能量管理策略可以将蓄电池SOC保持在合理范围内。与基于规则的能量管理策略相比,所提能量管理策略将SOC保持得更高,有利于蓄电池的健康。此外,由于预测范围有限,相较于基于动态规划控制策略,所提策略的SOC下降得更快。
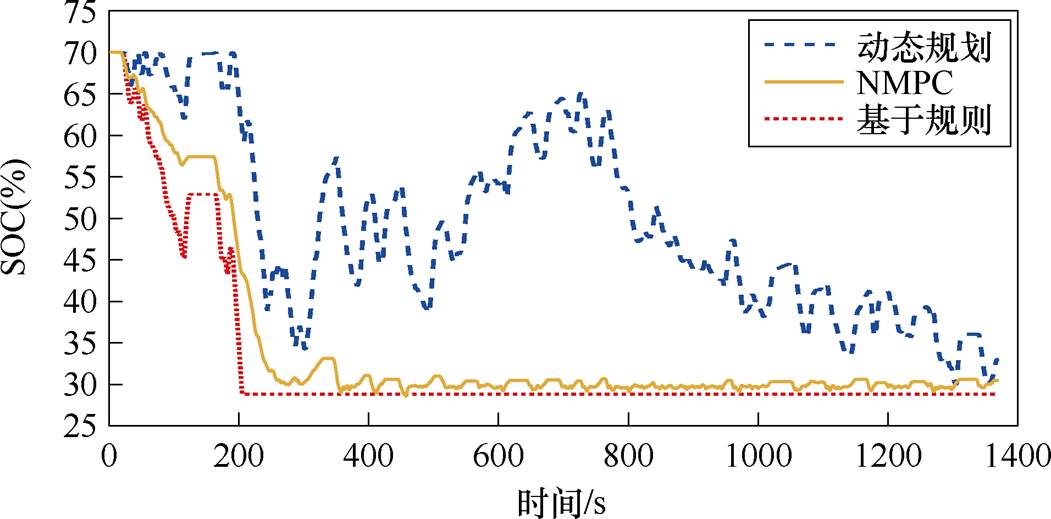
图25 FTP72工况下的系统SOC曲线
Fig.25 SOC curves under FTP72 condition
不同控制策略下的内燃机的工作点如图26所示。相较于基于规则的能量管理策略,所提出的功率协调控制策略和基于动态规划的策略的内燃机工作点均位于内燃机最佳工作曲线附近,在同等功率输出的情况下具有最低的油耗。同时,与基于动态规划的策略相比,所提出的控制策略由于预测范围有限,其位于最高效率区的工作点少于离线最优解。
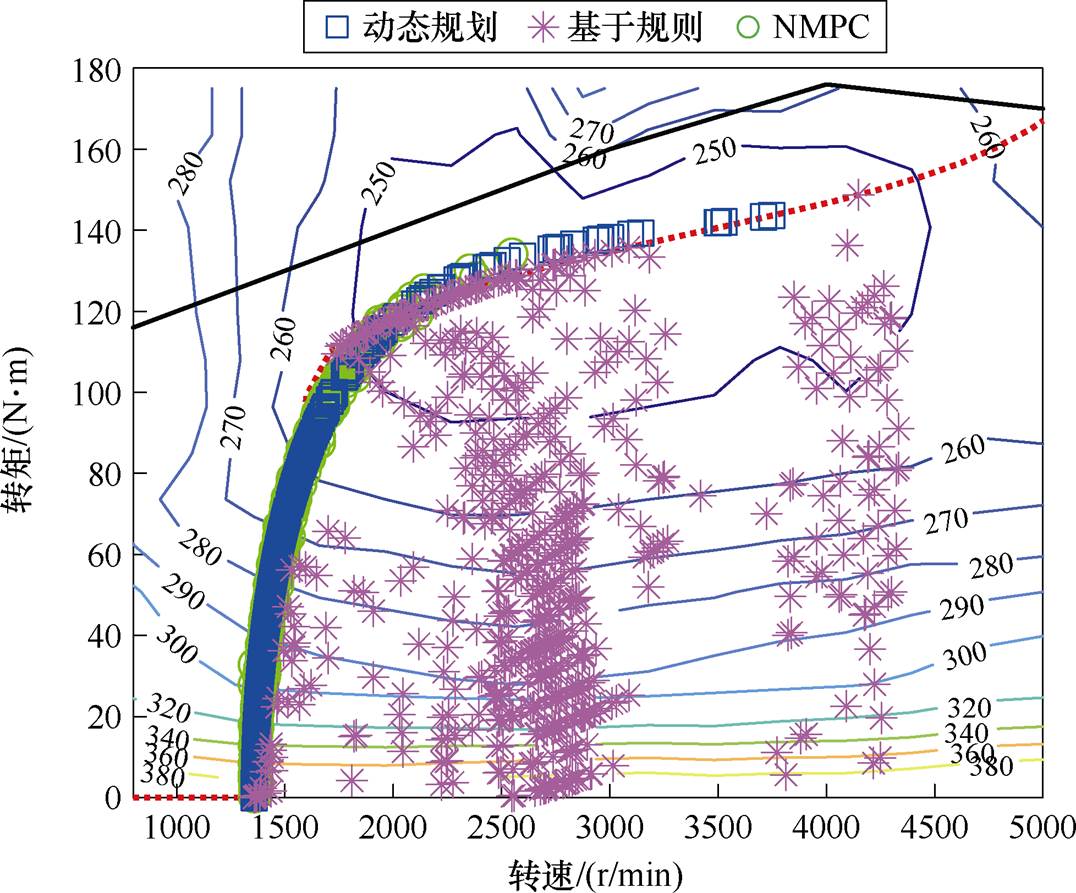
图26 FTP72工况下的内燃机工作点
Fig.26 Engine working point under FTP72 condition
本文提出了一种双转子混合动力系统功率协调控制策略,实现了双转子混合动力系统的协调和高效运行。基于DRPMR电机的结构特点,引入旋转隔离空间实现了DRPMR电机的机械解耦,将DRPMR电机的控制转变为内、外电机的协调控制。在此基础上,设计了以燃油经济性为优化目标的功率协调控制策略,采用电机转矩补偿策略实现了能量管理层和电机控制层的协调,对双转子混合动力系统整体性能进行协同优化。仿真和实验结果表明,所提协调控制策略实现了双转子混合动力系统的高效稳定运行。基于本研究的结论,未来的研究工作将聚焦于能量管理策略的优化以及多时间尺度下的能量管理策略。
参考文献
[1] Paul S, Chang J. Fast model-based design of high performance permanent magnet machine for next generation electric propulsion for urban aerial vehicle application[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(2): 143-151.
[2] 胡俊杰, 潘羿, 徐成明, 等. 基于动态交通推演的电动汽车充电快速引导策略[J]. 电工技术学报, 2025, 40(9): 2880-2896.
Hu Junjie, Pan Yi, Xu Chengming, et al. Fast guidance strategy for electric vehicle charging based on dynamic traffic inference[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2880-2896.
[3] 刘国鹏, 白金刚, 郎杰文, 等. 切割和过盈配合对双绕组双聚磁式磁场调制无刷复合结构电机性能影响的研究[J]. 电机与控制学报, 2025, 29(2): 1-13.
Liu Guopeng, Bai Jingang, Lang Jiewen, et al. Research on influence of cutting and interference fit on performance of dual-winding dual-concentrated- flux-type magnetic-field modulated brushless compound- structure machine[J]. Electric Machines and Control, 2025, 29(2): 1-13.
[4] 王于涛, 隋义, 刘国鹏, 等. 横向错位磁场调制型无刷双转子电机的工作机理与性能分析[J]. 电工技术学报, 2022, 37(22): 5677-5686.
Wang Yutao, Sui Yi, Liu Guopeng, et al. Operating principle and performance analysis of transverse- dislocated magnetic-field modulated brushless double- rotor machine[J]. Transactions of China Electro- technical Society, 2022, 37(22): 5677-5686.
[5] Sun Wei, Li Qiang, Sun Le, et al. Study on magnetic shielding for performance improvement of axial-field dual-rotor segmented switched reluctance machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 50-61.
[6] Jiang Mingyuan, Niu Shuangxia. Overview of dual mechanical port machines in transportation electri- fication[J]. IEEE Transactions on Transportation Electrification, 2024, 10(3): 4959-4977.
[7] Cheng He, Liao Shuo, Yan Wenju. Development and performance analysis of segmented-double-stator switched reluctance machine[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1298-1309.
[8] Du Jinhua, Xue Yuntian, Liu Quanwei, et al. Improved analytical model for inductance calculations of a dual-rotor permanent magnet reluctance machine based on magnetic networks[J]. IEEE Transactions on Industry Applications, 2018, 54(6): 5822-5832.
[9] 刘欣, 冯皓, 王晓远. 超环面双转子混合动力系统性能分析及优化[J]. 电机与控制学报, 2023, 27(5): 56-64.
Liu Xin, Feng Hao, Wang Xiaoyuan. Performance analysis and optimization of toroidal double-rotor hybrid power system[J]. Electric Machines and Control, 2023, 27(5): 56-64.
[10] 庞珽, 陈骁, 黄声华, 等. 电无级变速器的内燃机最佳效率控制[J]. 电工技术学报, 2011, 26(6): 26-32.
Pang Ting, Chen Xiao, Huang Shenghua, et al. ICE optimal efficiency control of electrical variable trans- mission[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 26-32.
[11] Cheng Yuan, Cui Shumei, Song Liwei, et al. The study of the operation modes and control strategies of an advanced electromechanical converter for auto- mobiles[J]. IEEE Transactions on Magnetics, 2006, 43(1): 430-433.
[12] Cheng Yuan, Trigui R, Espanet C, et al. Speci- fications and design of a PM electric variable transmission for Toyota prius II[J]. IEEE Transa- ctions on Vehicular Technology, 2011, 60(9): 4106- 4114.
[13] 徐奇伟, 宋立伟, 崔淑梅, 等. 基于电气变速器的混合动力车中动力分配策略[J]. 电工技术学报, 2013, 28(2): 44-54.
Xu Qiwei, Song Liwei, Cui Shumei, et al. Force distribution strategy of hybrid electric vehicle based on electric variable transmission[J]. Transactions of China Electrotechnical Society, 2013, 28(2): 44-54.
[14] Liu Jiaqi, Tong Chengde, Jin Zengfeng, et al. Research on system control and energy management strategy of flux-modulated compound-structure permanent magnet synchronous machine[J]. CES Transactions on Electrical Machines and Systems, 2017, 1(2): 100-108.
[15] Han Xun, Kong Wubin, Qu Ronghai, et al. Flexible energy conversion control strategy for brushless dual-mechanical-port dual-electrical-port machine in hybrid vehicles[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3910-3920.
[16] 刘栋良, 赵金洋, 董旭辉, 等. 扩展卡尔曼观测器下的永磁同步电机负载扰动抑制研究[J]. 电工技术学报, 2025, 40(8): 2488-2503.
Liu Dongliang, Zhao Jinyang, Dong Xuhui, et al. Research on load disturbance suppression technology of permanent magnet synchronous motor under extended Kalman filter[J]. Transactions of China Electrotechnical Society, 2025, 40(8): 2488-2503.
[17] 艾星全, 肖岚, 伍群芳. 基于谐波注入的双三相PMSM全转矩范围最小铜耗缺相容错控制策略[J]. 电工技术学报, 2025, 40(10): 3157-3169.
Ai Xingquan, Xiao Lan, Wu Qunfang. Fault-tolerant control strategy of open-phase fault with minimum loss in full torque operation range for DTP-PMSM based on harmonic current injection[J]. Transactions of China Electrotechnical Society, 2025, 40(10): 3157-3169.
[18] 韩硕, 张勇军, 肖雄, 等. 面向异步电机模型预测直接转矩控制的自适应谐波消除方法[J]. 电工技术学报, 2025, 40(4): 1078-1089.
Han Shuo, Zhang Yongjun, Xiao Xiong, et al. Adaptive harmonic elimination for model predictive direct torque control of asynchronous motor[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1078-1089.
[19] Liu Xu, Kong Wubin, Qu Ronghai, et al. Dynamic performance improvement control of brushless dual- electrical-port dual-mechanical-port machine with integrated winding[C]//2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 2020: 2169-2175.
[20] Han Xun, Fang Haiyang, Li Dawei, et al. Modeling and drive control of a brushless dual-mechanical-port machine with integrated winding[J]. IEEE Transa- ctions on Industrial Electronics, 2021, 68(3): 2059- 2071.
[21] Wang Yunchong, Niu Shuangxia. Optimal design and control of double-rotor flux-bidirectional modulation machine[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-6.
[22] Du Jinhua, Xue Yuntian, Yang Xintuan. Modeling and inner-outer decoupling of dual-rotor machines for continuous variable transmission systems[J]. IEEE Transactions on Industrial Electronics, 2017, 64(11): 8472-8483.
Abstract A dual-rotor hybrid powertrain can be used to replace a conventional planetary gear structure and offers desired performance in improving powertrain operation efficiency, reliability, and compactness.Due to its advantages of high-power density and good heat dissipation, the dual-rotor permanent magnet reluctance (DRPMR) machine has great potential in a dual-rotor hybrid powertrain. However, the complex coupling relationship of the dual-rotor hybrid powertrain poses a challenge for its high-performance control under multiple operating conditions of hybrid electric vehicles. The electromagnetic coupling between the inner and outer machines may increase electromagnetic loss and weaken the output torque. Furthermore, the lower torsional stiffness of the DRPMR machine may result in a shift in the engine's working point.
This paper proposes a coordination control strategy for the dual-rotor hybrid powertrain. Firstly, the structural characteristics of the DRPMR machine are analyzed, and mechanical decoupling of the dual-rotor machine is realized through the rotational isolation space. Secondly, based on the energy management system and the model of the DRPMR machine, the power coordination control strategy of the dual-rotor hybrid powertrain is designed. Based on nonlinear model predictive control, the dynamic characteristics of the powertrain are taken into account. To reduce the control complexity, the inequality constraints of the optimization problem are merged into a single constraint related to the engine's power. Finally, the effectiveness of the coordinated control strategy of the dual-rotor hybrid powertrain is demonstrated through system simulation under two specific operating conditions and experimental verification under three different operating modes.
The following conclusions can be drawn from the simulation and experimental analysis. A power coordination control strategy is proposed for dual-rotor hybrid powertrains. The structural characteristics of the DRPMR machine and its influence on the control of the dual-rotor hybrid powertrain are analyzed. The power-coordinated control strategy enables the optimal power point operation of the engine and dynamic compensation of the output torque by the dual-rotor machine. Simulation and experimental results show that the dual-rotor hybrid powertrain operates stably, proving the feasibility and effectiveness of the coordinated control strategy.
keywords:Dual-rotor hybrid powertrain, dual rotor permanent magnet reluctance (DRPMR) machine, coordination control
DOI: 10.19595/j.cnki.1000-6753.tces.241831
中图分类号:TM301.2
国家自然科学基金面上项目(52277065)和西安市科技计划项目(24GXFW0042)资助。
收稿日期 2024-10-18
改稿日期 2025-04-11
杨 哲 男,1999年生,硕士,研究方向为混合动力汽车能量管理与电机驱动控制。E-mail: 3122304024@stu.xjtu.edu.cn
杜锦华 女,1984年生,教授,博士生导师,研究方向为电机设计及控制。E-mail: jinhuadu@mail.xjtu.edu.cn(通信作者)
(编辑 崔文静)