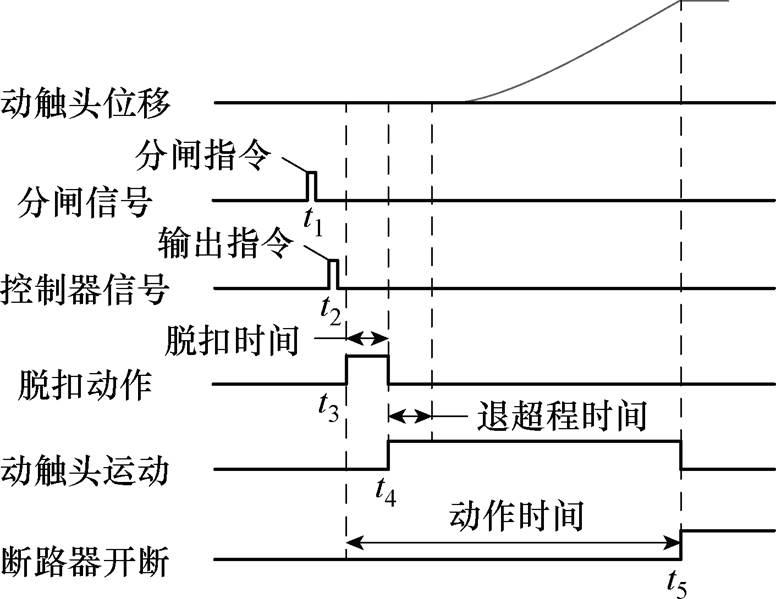
图1 快速断路器开断时序
Fig.1 Fast circuit breaker opening sequence
摘要 柔性低频交流输电是输送20 Hz的全新交流输电技术,可有效提升输送的容量、距离及效率,解决海上风电远距离输送、电网安全互联等难题。由于其频率较低,断路器切除短路故障时存在燃弧时间长、能量大等问题,需要结合选相分闸的技术方案。220 kV及以上电压等级的快速断路器常采用双重化继保装置,采用双脱扣方式,其动作时间与单脱扣存在一定的时间差,影响选相分闸的准确性。针对上述问题,该文设计了一种带去磁线圈的双冗余斥力机构,对斥力机构的磁场、机械特性及动作时间差开展了研究。基于磁场的耦合关系提出了采用去磁线圈减小动作时间差的方法,并设计了双冗余斥力机构;建立其数学模型,推导了去磁线圈与斥力线圈间的磁场耦合关系;分析了电容电压、电容容量及去磁线圈匝数等参数对动作时间差的多因素耦合影响规律,获得了最佳设计参数。仿真结果表明,去磁线圈的设计能够有效地减小快速断路器动作时间差。进行了样机制作,实验验证了其可行性,为提升快速断路器选相分闸准确性提供保障。
关键词:快速断路器 电磁斥力机构 斥力脱扣液压机构 去磁线圈
柔性低频输电是输送20 Hz的全新交流输电技术,能够减小电抗,提高输送功率与输电距离,解决海上风电远距离大容量输电的难题。柔性低频输电是对于工频交流输电与直流输电方式的有益补充,也可以应用于电网安全互联、多岛屿互联、电缆化城网供电等场景,是一种高效、新兴的交流输电技术[1-5]。
常规SF6断路器脱扣采用普通电磁阀,电磁铁带电后驱动一级、二级阀逐级转换,动作延迟大,脱扣时间约为11~14 ms[6],由于输电线路电流频率较低,在切除短路故障时存在开断电弧燃弧时间长、能量大等问题,容易引起断路器的开断能力下降、触头烧蚀严重等现象,需要减小动作时间,提升开断能力。快速SF6断路器采用电磁斥力机构串联控制阀阀芯,通过电磁斥力带动其快速动作,大幅减小动作时间至小于2 ms。将快速断路器结合选相分闸技术对短路故障电流过零点的准确预测,可以有效地降低断路器的燃弧时间,在短燃弧时间成功开断,减小电流频率对断路器短路故障开断时间的影响,因此选相开断技术对低频断路器的开断性能具有重要意义。
基于斥力机构的快速脱扣装置具有结构简单、响应时间短、运动速度快等优点[7-10],能够大幅缩减脱扣时间[11-14]。目前,电磁斥力机构的研究主要集中于效率提升、磁场优化、缓冲设计、机械强度分析等方面。文献[15-16]研究了金属盘结构、导磁材料结构及线圈参数对出力效率的影响,并对其结构进行了合理设计。文献[17-19]对斥力机构结构强度问题开展研究,优化金属盘结构以满足高速冲击需求。文献[20-22]对斥力机构的磁场分布、机械特性、电磁缓冲等进行分析,从运动特性方面完成对机构的优化。
我国220 kV及以上电压等级的电力系统均采用双重化继保装置[23-24],其中一组主保装置发生故障时,断路器整机仍能实现分闸动作,但相较于双脱扣,断路器分闸时间具有一定的时间差。在低频输电选相分闸场景下发生线圈断线、晶闸管故障、主保装置故障等问题,选相分闸装置无法及时监测,会造成动作时间预测不准确,影响断路器的开断性能及短路电流开断时间。
为解决上述单/双继保装置驱动脱扣下的分闸时间差问题,本文设计了一种应用于液压机构脱扣装置的双冗余斥力机构,阐述了去磁线圈的驱动原理。基于有限元方法建立其仿真模型,对比分析了常规斥力脱扣装置与去磁线圈斥力脱扣装置的运动特性,验证了去磁线圈斥力机构设计的可行性。最后研制双冗余快速斥力机构样机,通过实验验证仿真的正确性。
本文所研究的252 kV低频快速断路器由液压碟簧机构操动,通过电磁斥力机构代替电磁阀、提升液压机构输出功率及传动效率、灭弧室提升分闸速度的方式,能够大幅减小脱扣动作时间、触头分闸时间、短燃弧时间。快速断路器开断时序如图1所示,经过选相分闸装置计算过零点后,向控制器输出分闸指令,t2时刻输出动作信号,经过一定控制系统反应时间于t3时刻电磁脱扣装置开始运动,t4时刻完成脱扣,液压机构带动动触头开始分闸操作。
图1 快速断路器开断时序
Fig.1 Fast circuit breaker opening sequence
如图2所示为采用传统电磁阀脱扣的液压机构工作原理示意图,图2a所示断路器为合闸状态,蓝色为低压油,红色为高压油。在机构完成合闸操作后,通过压缩储能碟簧使储能缸内的液压油具有较高的油压,活塞杆的上下侧均为高压油。在收到分闸指令时如图2b所示,分闸电磁铁吸合使得主阀内的先导阀导通,基于差动原理控制阀向上运动,使得活塞杆下侧变为低压油,其上下两侧具有较高的油压差向下运动,完成分闸过程。
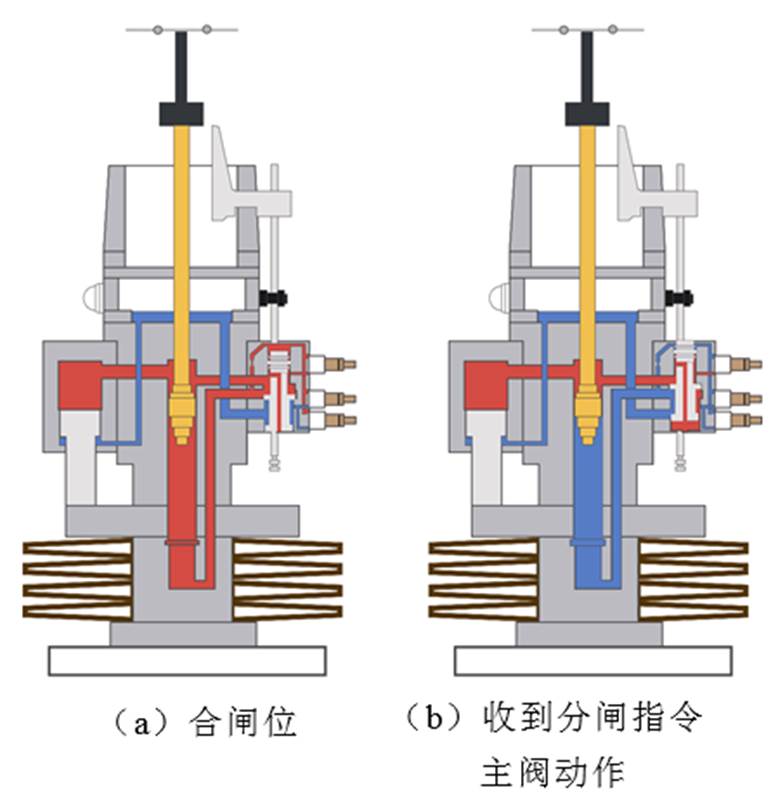
图2 液压机构分闸脱扣过程原理
Fig.2 Schematic diagram of hydraulic mechanism tripping process
传统分闸电磁铁吸合过程与控制阀运动过程共12 ms,时间较长。快速断路器要求液压机构能够在2 ms左右完成脱扣操作,因此本文设计将电磁斥力机构与控制阀直接连接组成电磁斥力脱扣系统如图3所示,由斥力机构带动控制阀运动,利用斥力机构的极快的运动反应特性,驱动控制阀快速切换油路,最大限度地降低液压机构脱扣时间,实现大幅降低断路器分闸时间的作用。
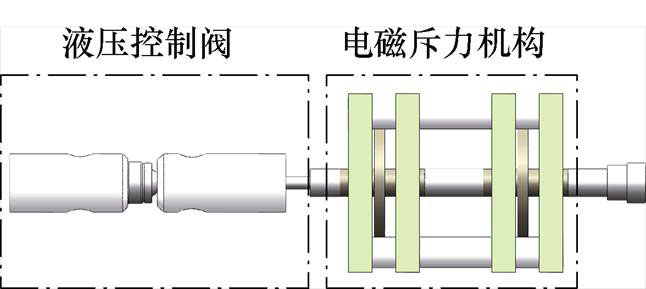
图3 电磁斥力脱扣系统
Fig.3 Electromagnetic repulsion tripping system
252 kV快速断路器由双重化继保装置的两套继保系统控制,分别驱动双斥力机构运动,以实现其中一套主保装置发生故障时,断路器整机仍能实现分闸动作。在断路器正常分闸工作情况下,为双斥力机构同时发出分闸指令;而在一套主保装置损坏情况下,为单斥力机构发出分闸指令。目前,所采用拓扑结构如图4a所示,图4b为此拓扑机构的位移及速度曲线,双斥力机构同时动作会产生双倍的动能,与单斥力机构的动作时间相比具有一定的时间差,为0.94 ms。
(a)双冗余斥力机构拓扑结构
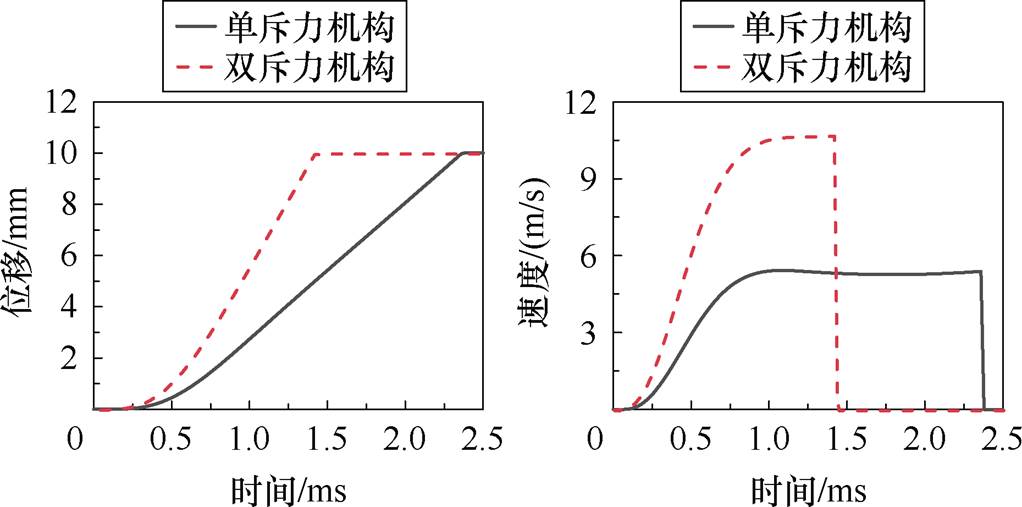
(b)该拓扑结构下位移与速度曲线
图4 现有双冗余斥力机构拓扑及动作特性
Fig.4 Topology and action characteristics of existing dual redundant repulsion mechanisms
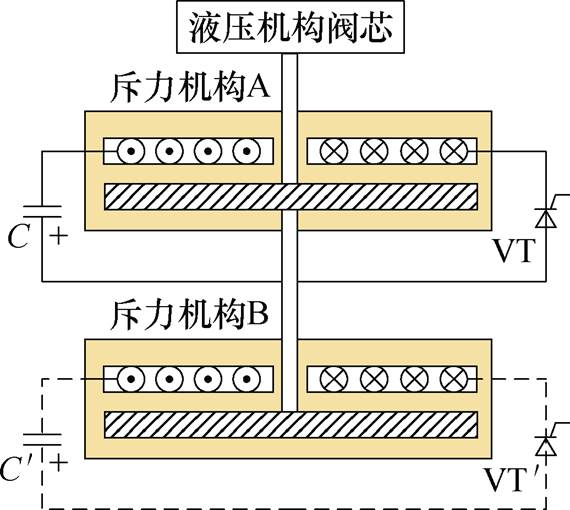
为了解决这一问题,本研究提出了一种去磁线圈拓扑结构如图5所示,运动端采用金属盘,在线圈盘内设计两层线圈,距金属盘近端为斥力线圈,距金属盘远端为去磁线圈,去磁线圈缠绕方向与斥力线圈相反。
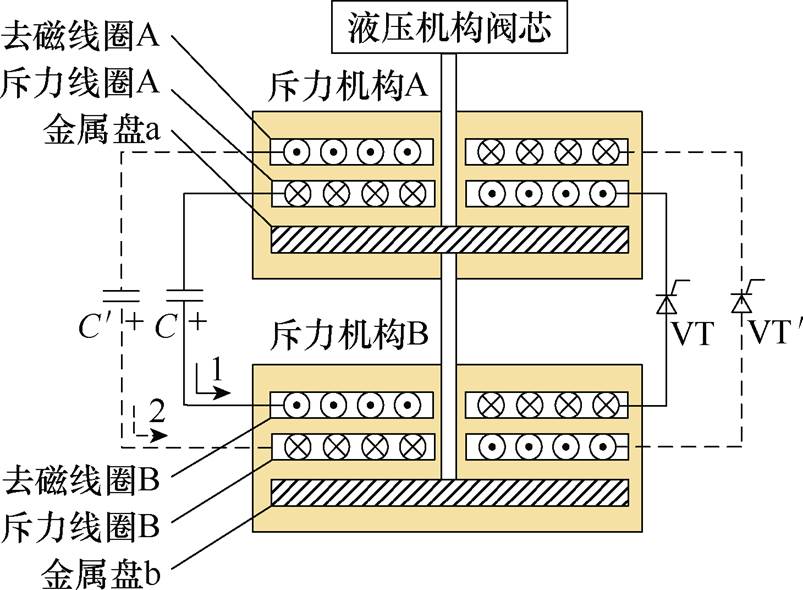
图5 基于去磁线圈的双冗余斥力机构拓扑结构
Fig.5 Topological structure of dual redundant repulsive force mechanism based on demagnetization coil
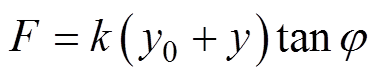
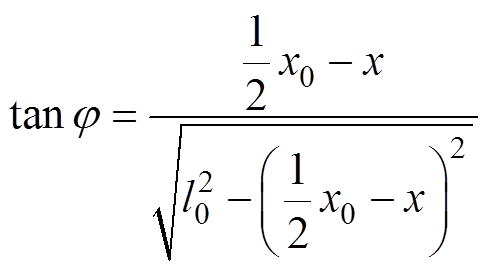
当继保装置正常工作,需要断路器分闸动作时,给晶闸管VT、 触发信号使其导通,回路1与回路2同时通电。此时,斥力线圈产生斥力磁场,使金属盘内生成感应涡流,进而产生斥力,去磁线圈产生与斥力磁场相反方向的去磁磁场,减小斥力磁场对金属盘的斥力大小,总出力可表示为
触发信号使其导通,回路1与回路2同时通电。此时,斥力线圈产生斥力磁场,使金属盘内生成感应涡流,进而产生斥力,去磁线圈产生与斥力磁场相反方向的去磁磁场,减小斥力磁场对金属盘的斥力大小,总出力可表示为
 (1)
(1)
式中, 为正常工作下两金属盘出力和;
为正常工作下两金属盘出力和; 为斥力线圈A对金属盘a的斥力;
为斥力线圈A对金属盘a的斥力; 为去磁线圈A对金属盘a的吸力;
为去磁线圈A对金属盘a的吸力; 为斥力线圈B对金属盘b的斥力;
为斥力线圈B对金属盘b的斥力; 为去磁线圈B对金属盘b的吸力;
为去磁线圈B对金属盘b的吸力; 为斥力线圈A对金属盘a作用的磁链;
为斥力线圈A对金属盘a作用的磁链; 为斥力线圈B对金属盘b作用的磁链;
为斥力线圈B对金属盘b作用的磁链; 为去磁线圈A对金属盘a作用的磁链;
为去磁线圈A对金属盘a作用的磁链; 为去磁线圈B对金属盘b作用的磁链。
为去磁线圈B对金属盘b作用的磁链。
当需要断路器分闸动作,同时回路2驱动晶闸管的继保装置故障,此时仅能触发VT一个晶闸管。仅有去磁线圈B与斥力线圈A通电,由于斥力线圈B中没有电流,此时去磁线圈B对金属盘b的力由吸力变为斥力,斥力线圈A与去磁线圈B同时给金属盘a与金属盘b施加斥力,总出力大小可表示为
 (2)
(2)
式中, 为回路2触发故障下两金属盘出力和。
为回路2触发故障下两金属盘出力和。
要使两种情况下动作时间相同,即要控制与的大小,使得在相同时间下完成脱扣操作。
 (3)
(3)
式中, 为斥力机构行程;
为斥力机构行程; 为机构动作时间;
为机构动作时间; 为运动部件质量。
为运动部件质量。
由此,去磁线圈的设计在双斥力机构同时驱动时能够减小线圈斥力磁场,单斥力机构动作时能够提供额外的脉冲磁场,通过合理的参数设计可实现减小动作时间差与减小机械冲击的作用。
根据1.3节提出的去磁线圈设计思想,设计了如图6所示的双冗余斥力机构。两组斥力机构由连接杆连接为一体,分闸线圈盘内分别缠绕去磁线圈与斥力线圈,合闸线圈盘缠绕合闸线圈。分闸过程采用如图5所示的接线方式,由上下两组去磁线圈与斥力线圈共同驱动,以减小双斥力机构同时驱动产生的巨大冲击。保持力由弹簧保持装置提供,底部加装限位装置,防止金属盘对线圈造成高速冲击。考虑去磁线圈与斥力线圈间相互作用力,线圈盘下方装配固定板,保证线圈布置安全可靠。
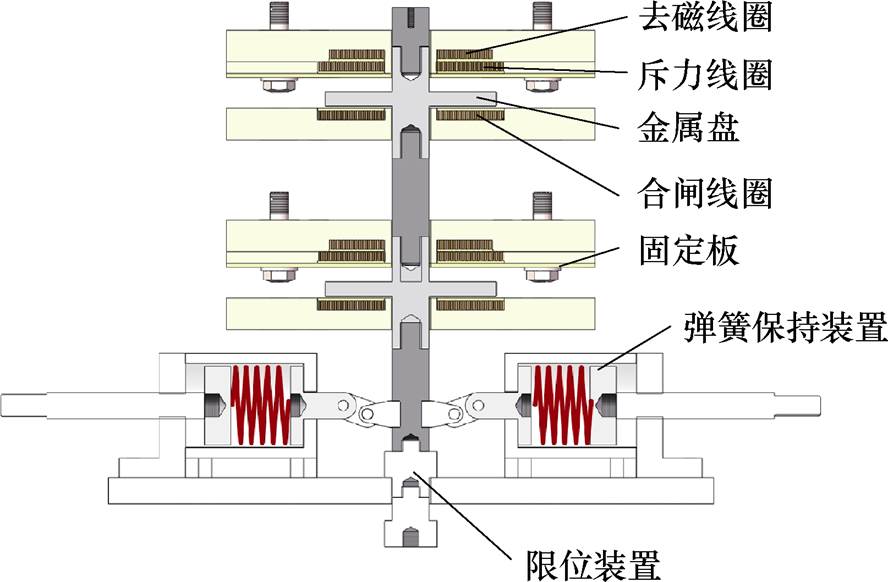
图6 双冗余斥力机构设计
Fig.6 Design diagram of dual redundant repulsion mechanism
如图7所示为基于去磁线圈的双冗余斥力机构等效电路,实线为回路1,虚线为回路2。当电容 与
与 同时驱动时,线圈
同时驱动时,线圈 与
与 提供分闸所需斥力,线圈
提供分闸所需斥力,线圈 与
与 产生与斥力线圈方向相反的磁场,起到去磁作用。由于两斥力机构出力大小完全相同,以下仅对斥力机构A进行分析,穿过斥力机构A中各线圈盘与金属盘的磁链大小为
产生与斥力线圈方向相反的磁场,起到去磁作用。由于两斥力机构出力大小完全相同,以下仅对斥力机构A进行分析,穿过斥力机构A中各线圈盘与金属盘的磁链大小为
 (4)
(4)
式中, 为斥力线圈的电流;
为斥力线圈的电流; 为去磁线圈的电流;
为去磁线圈的电流; 为金属盘感应涡流;
为金属盘感应涡流; 为斥力线圈电感;
为斥力线圈电感; 为去磁线圈电感;
为去磁线圈电感; 为金属盘电感;
为金属盘电感; 为斥力线圈与去磁线圈的互感系数,
为斥力线圈与去磁线圈的互感系数, 为去磁线圈与斥力线圈的互感系数,为
为去磁线圈与斥力线圈的互感系数,为 ;
; 为斥力线圈与金属盘的互感系数,
为斥力线圈与金属盘的互感系数, 为金属盘与斥力线圈的互感系数,
为金属盘与斥力线圈的互感系数, ;
; 为去磁线圈与金属盘的互感系数,
为去磁线圈与金属盘的互感系数, 为金属盘与去磁线圈的互感系数,
为金属盘与去磁线圈的互感系数, ;
; 为斥力线圈产生磁通与自身交链产生的自感磁链;
为斥力线圈产生磁通与自身交链产生的自感磁链; 为去磁线圈产生磁通与斥力线圈交链产生的互感磁链;
为去磁线圈产生磁通与斥力线圈交链产生的互感磁链; 为金属盘产生磁通与斥力线圈交链产生的互感磁链;
为金属盘产生磁通与斥力线圈交链产生的互感磁链; 为斥力线圈产生磁通与去磁线圈交链产生的互感磁链;
为斥力线圈产生磁通与去磁线圈交链产生的互感磁链; 为去磁线圈产生磁通与自身交链产生的自感磁链;
为去磁线圈产生磁通与自身交链产生的自感磁链; 为金属盘产生磁通与去磁线圈交链产生的互感磁链;
为金属盘产生磁通与去磁线圈交链产生的互感磁链; 为斥力线圈产生磁通与金属盘交链产生的互感磁链;
为斥力线圈产生磁通与金属盘交链产生的互感磁链; 为去磁线圈产生磁通与金属盘交链产生的互感磁链;
为去磁线圈产生磁通与金属盘交链产生的互感磁链; 为金属盘产生磁通与自身交链产生的自感磁链。
为金属盘产生磁通与自身交链产生的自感磁链。
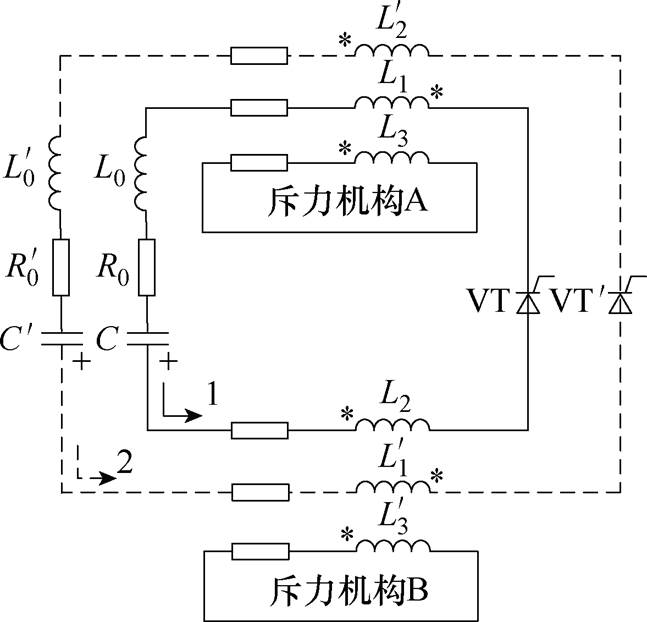
图7 基于去磁线圈的双冗余斥力机构等效电路
Fig.7 Equivalent circuit diagram of dual redundant repulsion mechanism based on demagnetization coil
分闸过程中电容器、斥力线圈、去磁线圈和金属盘组成的等效电路关系为

 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
式中, 为电容及接线电感;
为电容及接线电感; 为斥力线圈电阻;
为斥力线圈电阻; 为去磁线圈电阻;
为去磁线圈电阻; 为金属盘电阻;R0为电容及接线电阻;为电容容量;
为金属盘电阻;R0为电容及接线电阻;为电容容量; 为电容电压。
为电容电压。
此时,、,、耦合系统中电感储能分别为
 (10)
(10)
 (11)
(11)
式中, 为、耦合系统电感储存的能量;
为、耦合系统电感储存的能量; 为、耦合系统电感储存的能量。
为、耦合系统电感储存的能量。
则金属盘所受电动力与储能之间的关系为
 (12)
(12)
式中, 为金属盘所受电动力大小。
为金属盘所受电动力大小。
线圈对金属盘的斥力大小可表示为
 (13)
(13)
其中
 (14)
(14)
当电容 所在主保装置发生故障时,虚线回路2晶闸管无法导通,回路仅由C电容驱动,线圈与均提供分闸斥力,穿过斥力机构A中各线圈盘与金属盘的磁链大小为
所在主保装置发生故障时,虚线回路2晶闸管无法导通,回路仅由C电容驱动,线圈与均提供分闸斥力,穿过斥力机构A中各线圈盘与金属盘的磁链大小为
 (15)
(15)
穿过斥力机构B中各线圈盘与金属盘的磁链大小为
 (16)
(16)
分闸过程中电容器、斥力线圈和金属盘组成的等效电路关系为
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
线圈对金属盘的斥力大小可表示为
 (21)
(21)
本文斥力机构采用的弹簧保持装置,其传动系统可近似于如图8所示虚位移传动结构,根据虚位移原理,可建立Fp与Fq虚功方程为
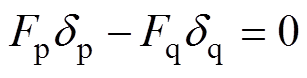 (22)
(22)
p、q两点虚位移关系有
 (23)
(23)
解得
 (24)
(24)
式中,Fp为斥力机构所受保持力;Fq为保持装置内弹簧压缩力; 为斥力机构运动虚位移;
为斥力机构运动虚位移; 为弹簧压缩的虚位移;
为弹簧压缩的虚位移; 为连接杆与x轴的夹角。
为连接杆与x轴的夹角。
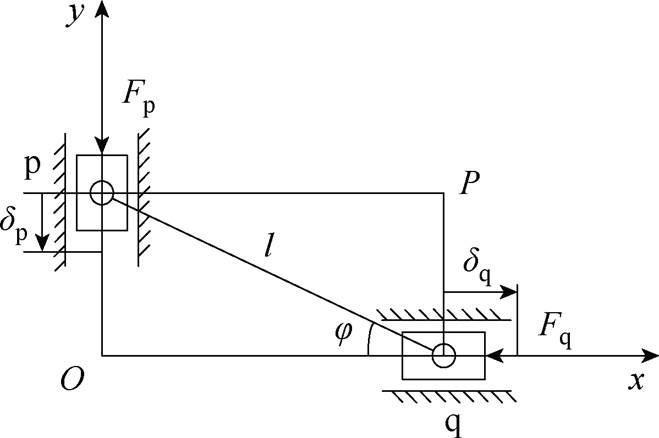
图8 虚位移传动结构
Fig.8 Virtual displacement transmission structure
操动机构向下运动位移为x时,弹簧相较于初始运动状态的压缩量y为
 (25)
(25)
式中, 为连接杆长度;为操动机构总行程。
为连接杆长度;为操动机构总行程。
此时,弹簧提供给机构的保持力大小为
 (26)
(26)
 (27)
(27)
式中, 为弹簧初始压缩量;
为弹簧初始压缩量; 为弹簧刚度系数。
为弹簧刚度系数。
双冗余斥力机构的分闸过程涉及磁场耦合、涡流损耗、回路放电、机械运动等多物理场耦合,本文采用有限元仿真软件Ansoft Maxwell建立仿真模型,通过计算电动势与磁动势进而推导出磁感应强度、电磁场能量、电磁力、电感等物理量,完成对运动过程的仿真求解。该模型设计线圈盘、金属盘、电容、保持力等参数见表1,机构运动过程弹簧保持装置提供保持力大小如图9所示,仿真模型如图10所示。
表1 双冗余斥力机构初始参数
Tab.1 Initial parameter table of dual redundant repulsion mechanism
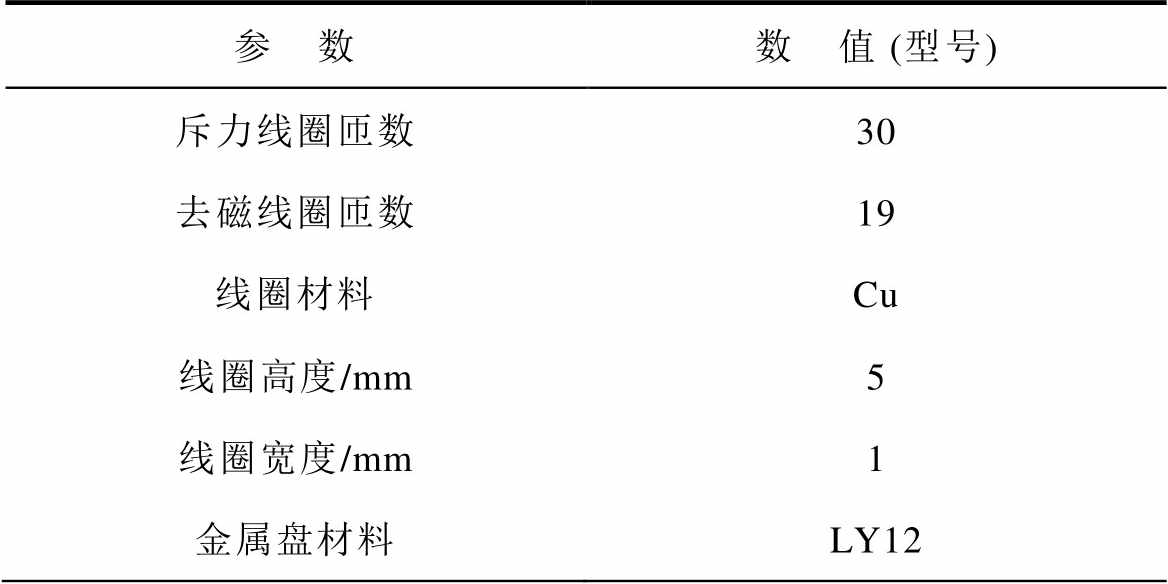
参 数数 值 (型号) 斥力线圈匝数30 去磁线圈匝数19 线圈材料Cu 线圈高度/mm5 线圈宽度/mm1 金属盘材料LY12
(续)
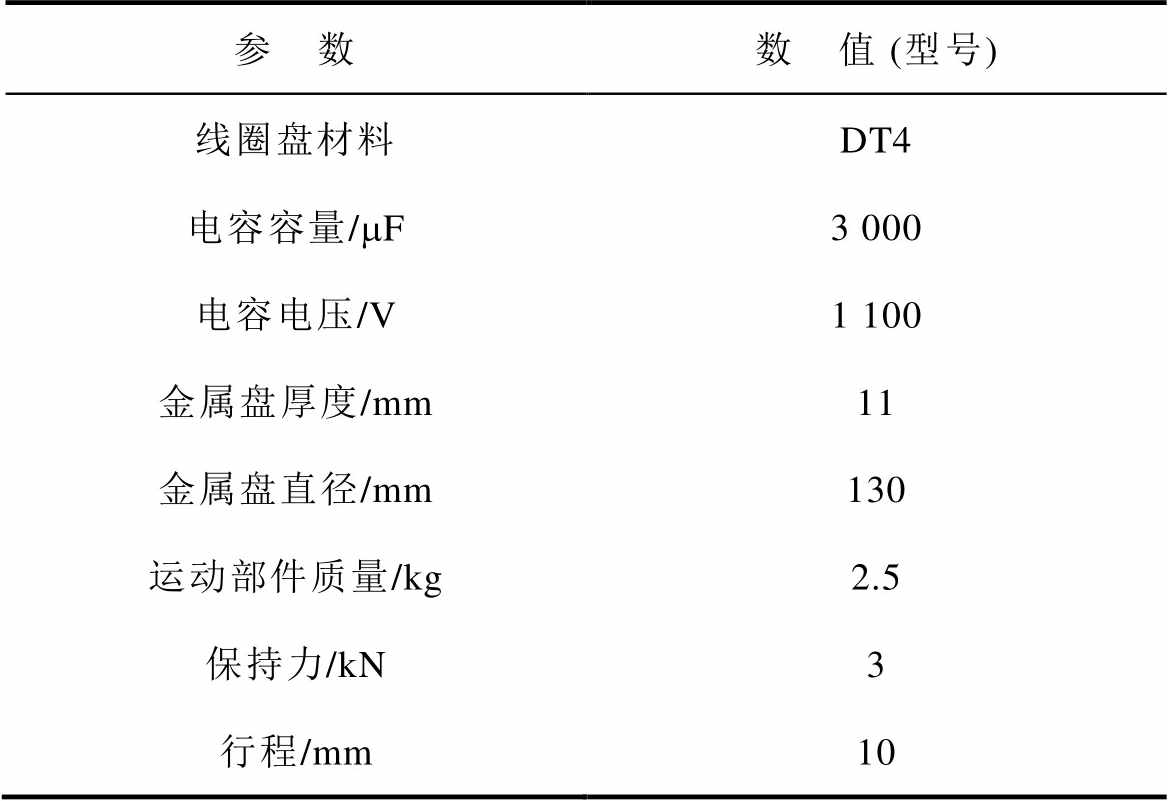
参 数数 值 (型号) 线圈盘材料DT4 电容容量/mF3 000 电容电压/V1 100 金属盘厚度/mm11 金属盘直径/mm130 运动部件质量/kg2.5 保持力/kN3 行程/mm10
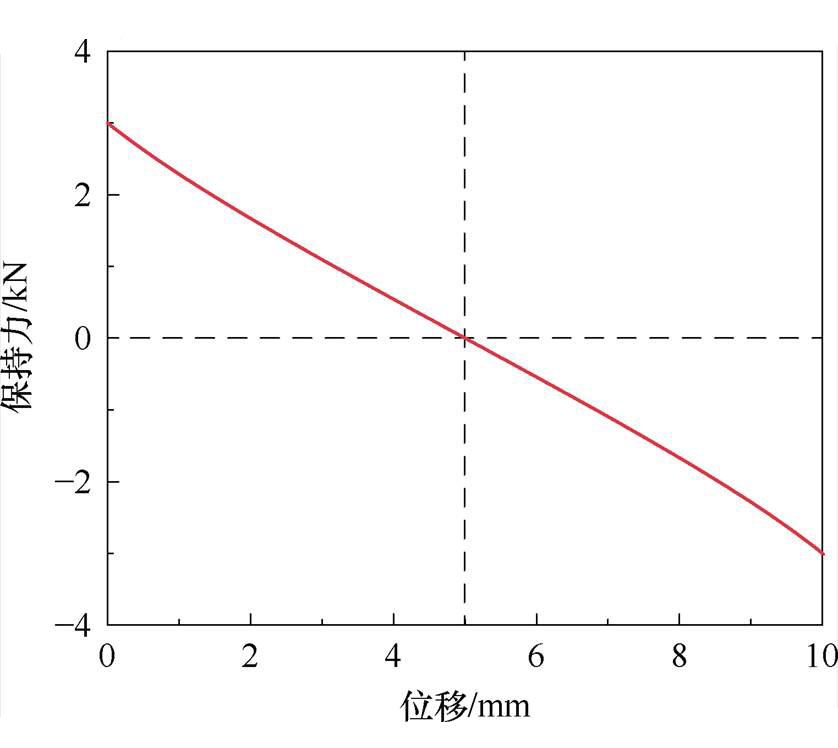
图9 机构运动过程弹簧提供保持力大小
Fig.9 The magnitude of the retaining force provided by the spring during the movement process of the mechanism
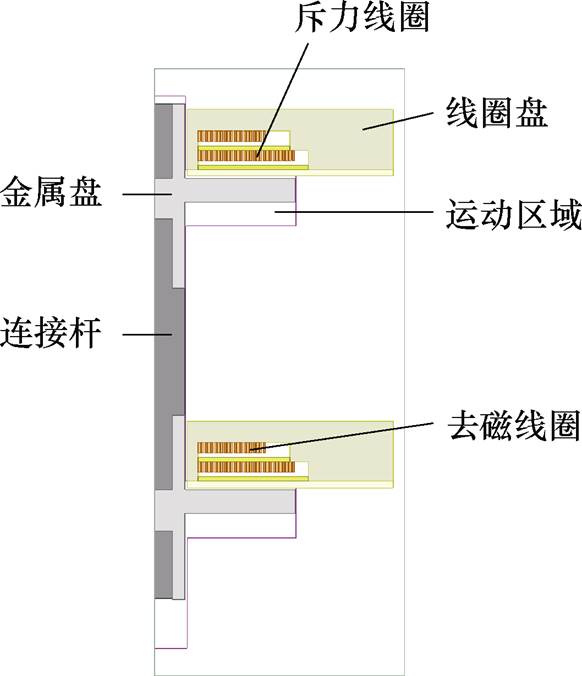
图10 Ansoft Maxwell二维轴对称仿真模型
Fig.10 Ansoft Maxwell 2D axisymmetric simulation model
基于2.2节斥力机构设计参数及仿真模型进行分析,得到仿真结果如图11所示,双斥力机构驱动下电容放电速度较快,峰值较大,单斥力机构驱动下电容放电持续时间较长,但峰值较小。由此导致双斥力机构金属盘产生的电磁斥力峰值较大,出力时间较短,单斥力机构金属盘电磁斥力峰值较小,出力时间较长。
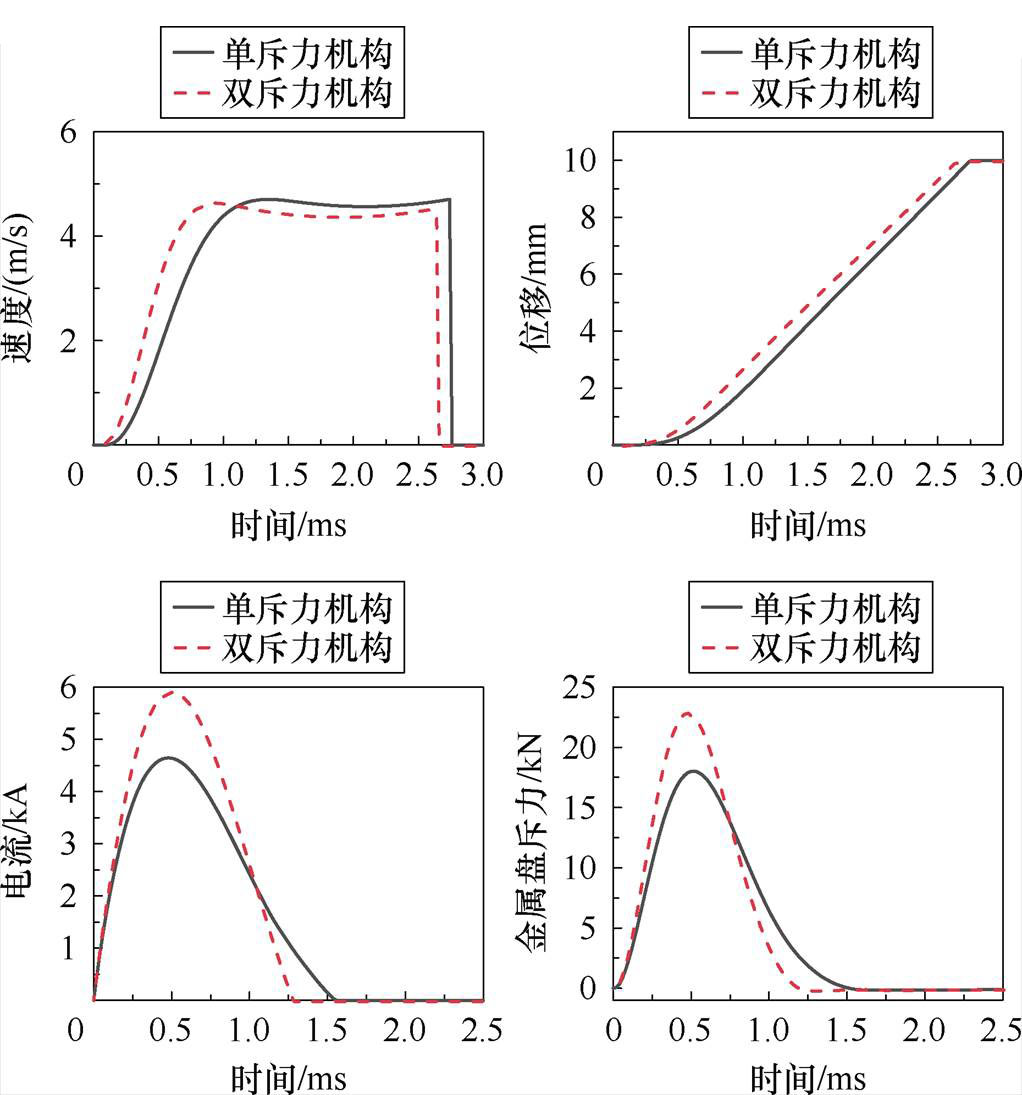
图11 初始设计下斥力机构动作特性
Fig.11 Action characteristics of repulsive mechanism under initial design
如图12所示为0.2 ms时刻单斥力机构与双斥力机构磁力线分布,单斥力机构驱动下上部分去磁线圈不产生磁场,线圈盘内部的磁场由下部分斥力线圈提供;双斥力机构驱动下去磁线圈与斥力线圈电流方向相反,其磁场方向也相反,有效削弱了斥力线圈内侧磁场。

(a)单斥力机构

(b)双斥力机构
图12 0.2 ms时刻磁力线分布
Fig.12 Magnetic field line distribution at 0.2 ms
此时单斥力机构与双斥力机构动作下末速度差异为0.18 m/s,运动结束时刻动能差异为2.079 J,相较于图4b动能差异105.73 J,机械冲击具有较大的缓解,其动作时间分别为2.75 ms与2.66 ms,时间差为0.09 ms,由此验证了该设计的可行性。
通过进一步合理设计电容参数与线圈参数,能够将动作时间控制在2 ms左右。
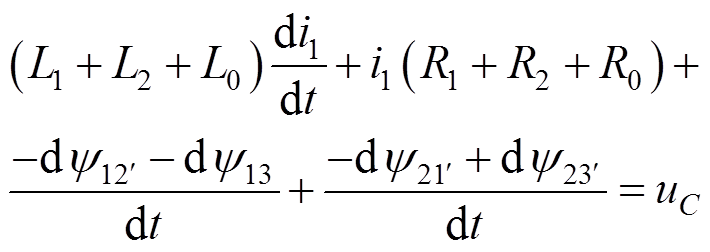
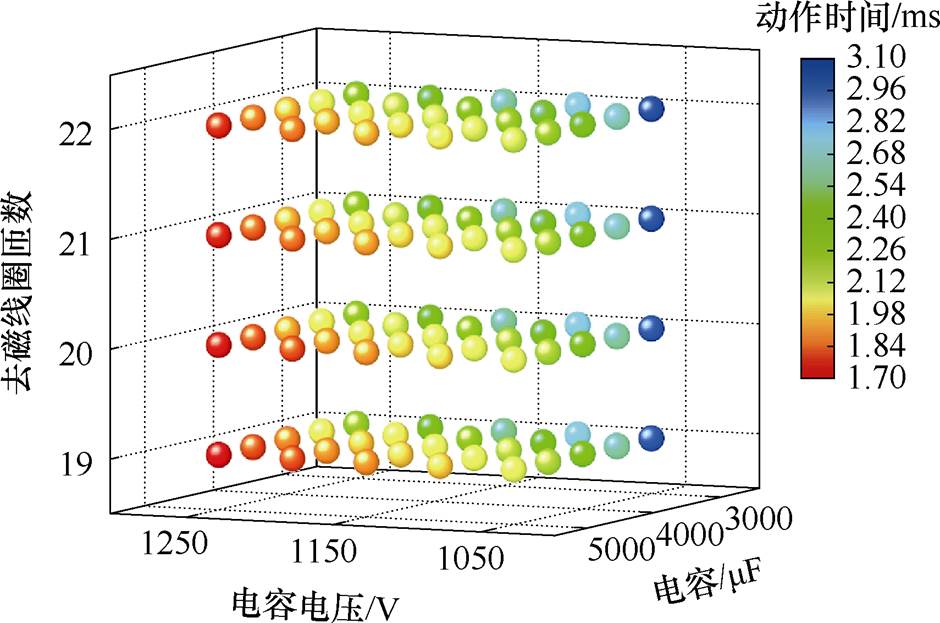
对于本文设计的双冗余斥力机构,影响其动作的参数主要有电容电压、电容容量以及去磁线圈匝数,为了探究以上多种参数对动作时间及其动作时间差的耦合影响,绘制斥力机构动作时间如图13所示。图中,由数据点的颜色代表动作时间或时间差大小,由红至蓝逐渐增大。
(a)单斥力机构动作时间
(b)双斥力机构动作时间
图13 斥力机构动作时间
Fig.13 Repulsive mechanism action time
图13a为单斥力机构动作时间图像,从图中可以看出,去磁线圈匝数一定时,在电容电压1 050~1 250 V,电容在3 000~5 000 mF的范围内,动作时间随着电容电压及电容的增大而减小,最短为1.72 ms,最长为3.03 ms。对比不同去磁线圈匝数对动态特性的影响,其他条件一定,去磁线圈匝数由19变化至22时,动作时间变化较小。表2为电容电压1 100 V,电容3 000 mF,不同去磁线圈匝数下单斥力机构的动态特性。可以看出,随着去磁线圈匝数增加,线圈电阻逐渐增大,驱动回路峰值电流逐渐减小,进而使得斥力线圈对金属盘1的斥力逐渐减小。对金属盘2而言,随着去磁线圈匝数增加,去磁线圈对金属盘2的斥力大小逐渐增大。对比两金属盘总出力大小,可见增加线圈匝数与增大回路电阻二者的耦合作用中,回路电阻的作用更为明显,这是由于去磁线圈与斥力盘2距离较远,斥力盘2感应产生的脉冲磁场较小。
表2 单斥力机构动态特性
Tab.2 Dynamic characteristics of single repulsive mechanism
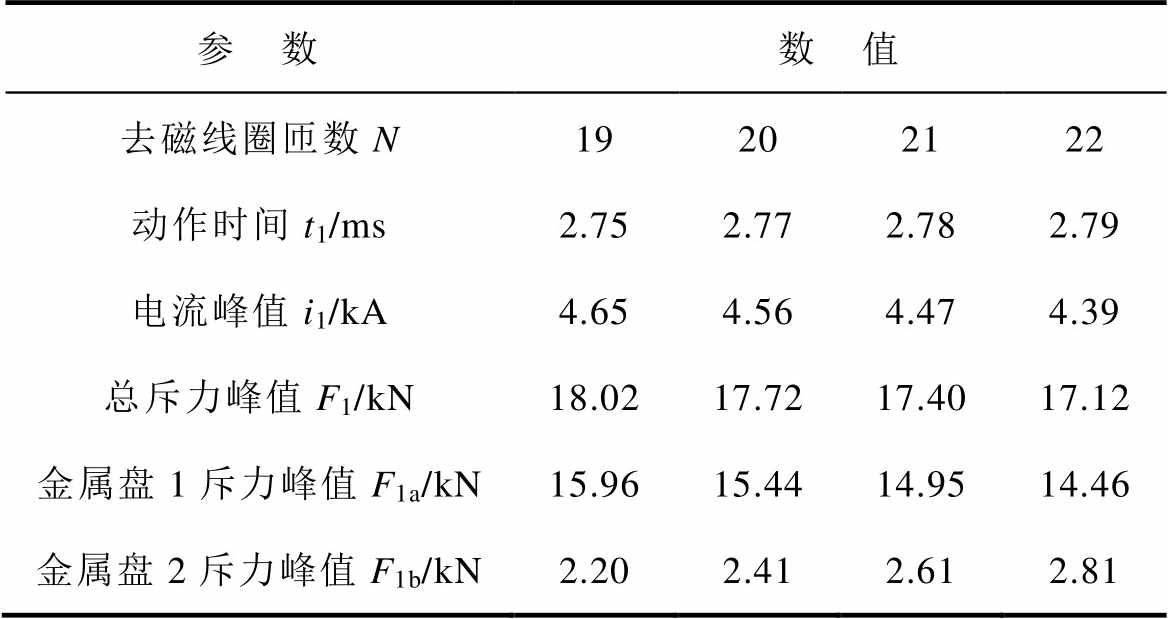
参 数数 值 去磁线圈匝数N19202122 动作时间t1/ms2.752.772.782.79 电流峰值i1/kA4.654.564.474.39 总斥力峰值F1/kN18.0217.7217.4017.12 金属盘1斥力峰值F1a/kN15.9615.4414.9514.46 金属盘2斥力峰值F1b/kN2.202.412.612.81
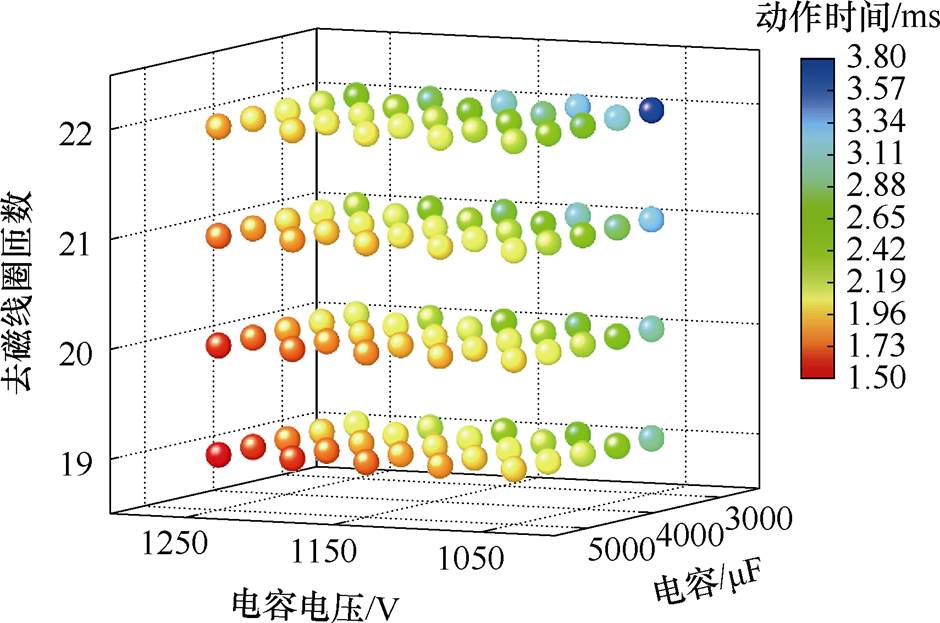
图13b为双斥力机构动作时间图像,可以看出,去磁线圈匝数一定时,在与图13a相同的电容参数范围内,动作时间最短为1.31 ms,最长为3.29 ms。随着去磁线圈匝数的增大,动作时间逐渐减小,去磁线圈对斥力线圈的去磁作用较为明显。坐标由(5 000, 1 250, 19)左下角变化至(3 000, 1 050, 22)右上角的过程中,动作时间逐渐增大,电容、电容电压、去磁线圈匝数三者对动作时间均有较大的影响。表3为电容电压1 100 V,电容3 000 mF,不同去磁线圈匝数下双斥力机构的动态特性。单斥力机构的电流峰值减小较为明显,而双斥力机构电流峰值变化量较小,这是由于去磁线圈与斥力线圈间存在互感,随着去磁线圈匝数增多,回路总电感逐渐减小,从而抵消了一部分因回路电阻增大减小电流的效果;由于去磁线圈匝数增加,斥力线圈产生的斥力磁场逐渐被去磁线圈产生的反向磁场抵消,因而金属盘感应产生的电磁斥力减小,电容放电结束时的运动速度减小,使得动作时间逐渐增大。
表3 双斥力机构动态特性
Tab.3 Dynamic characteristics of double repulsion mechanism
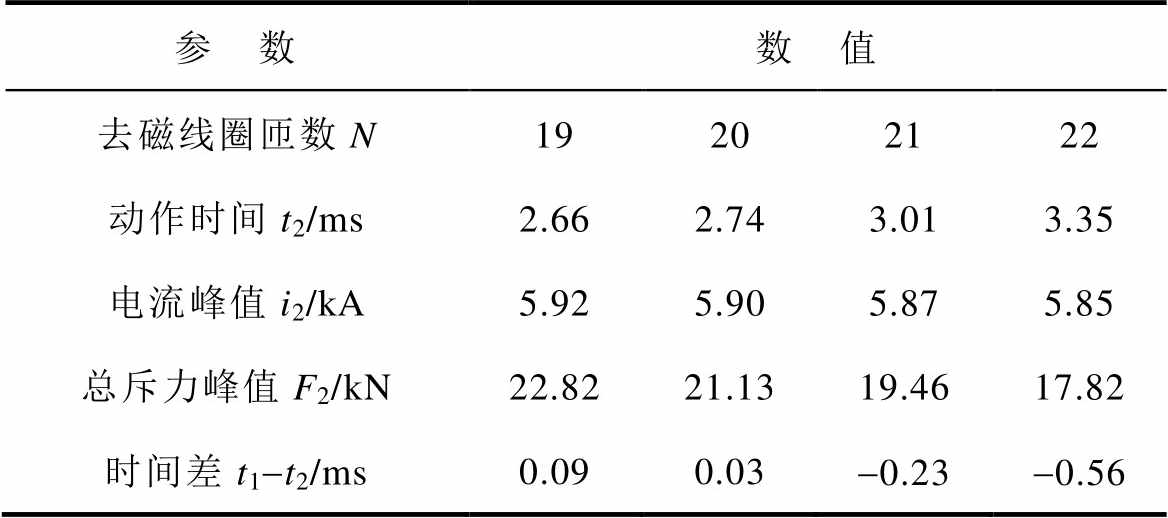
参 数数 值 去磁线圈匝数N19202122 动作时间t2/ms2.662.743.013.35 电流峰值i2/kA5.925.905.875.85 总斥力峰值F2/kN22.8221.1319.4617.82 时间差t1-t2/ms0.090.03-0.23-0.56
依据单斥力机构与双斥力机构动作时间分布,可计算得二者动作时间差t1-t2如图13所示。可以看出,在此参数分布下,随着电容容量增大、电容电压增大、去磁线圈匝数增大,动作时间差由负变正,由-0.76 ms变化至0.18 ms,其时间差反向最大与正向最大的数据分别位于(3 000, 1 050, 22)右上角,(5 000, 1 250, 19)左下角,改变电容、电容电压以及去磁线圈匝数能够有效对其时间差进行调整。
斥力机构动作时间差如图14所示,图15为图14对应的去磁线圈20、21、22匝数下电容容量-电容电压-动作时间差的三维曲面图。由图15a~图15c可以看出,随着去磁线圈匝数的增加,电容3 000~5 000 mF,电容电压1 050~1 250 V范围内,动作时间差的分布范围由0.02~0.13 ms改变至-0.76~-0.04 ms,极差由0.11 ms提升至0.72 ms,动作时间差关于电容参数的敏感程度逐渐增大。
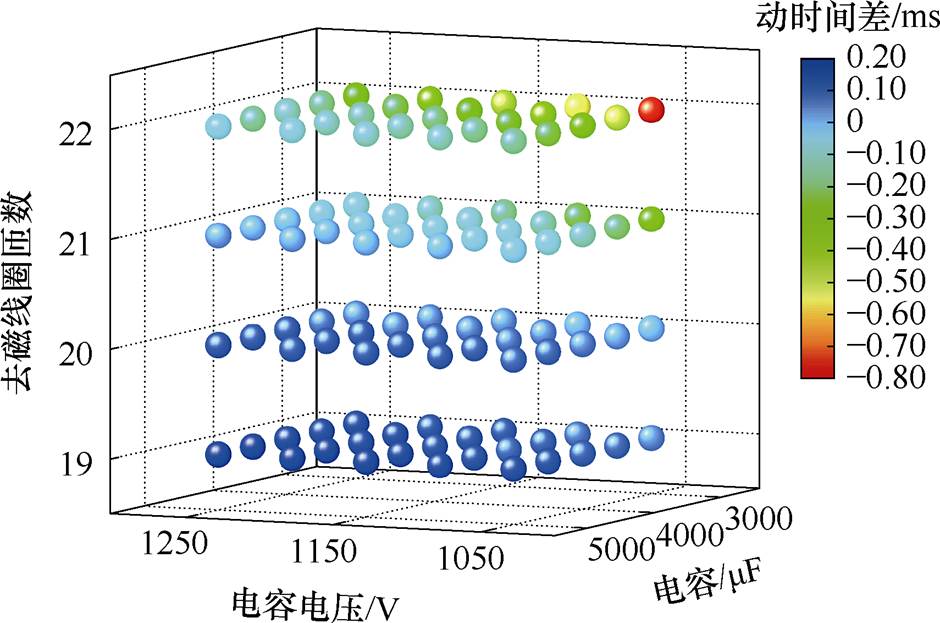
图14 斥力机构动作时间差
Fig.14 Action time difference of repulsion mechanism
图13已提及在电容参数一定时,增加去磁线圈匝数能够增大双斥力机构动作时间,单斥力机构时间基本不变,从而使动作时间差由负变正,时间差存在过零点。而调整电容参数对单斥力机构与双斥力机构均有影响,对二者的影响程度无法直观判断。由此,依据图15可以看出,去磁线圈匝数一定的条件下,随着电容及电容电压的增大,动作时间差大小呈正向增大趋势,由此可见,双斥力机构动作时间的减小程度要大于单斥力机构。同时,图14b中动作时间差分布为-0.32~0.05 ms,这说明去磁线圈匝数合适的情况下,调整电容参数得到的时间差也存在过零点,能够有效消除时间差。
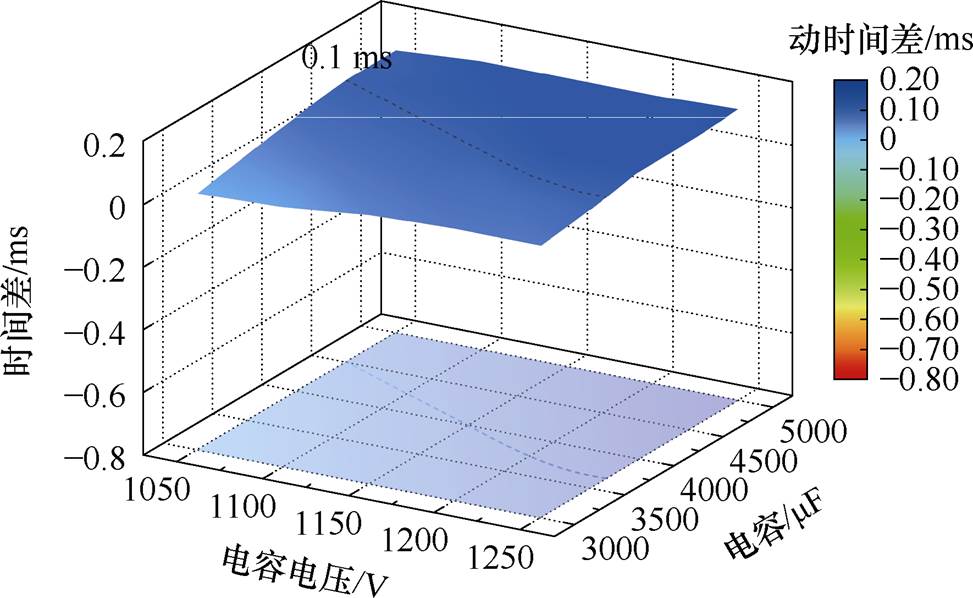
(a)去磁线圈20匝
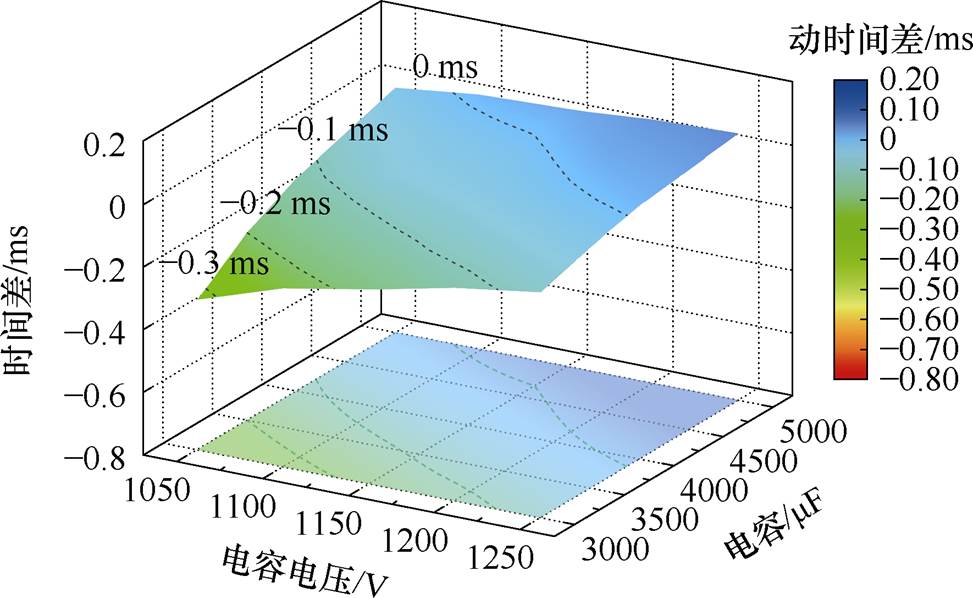
(b)去磁线圈21匝
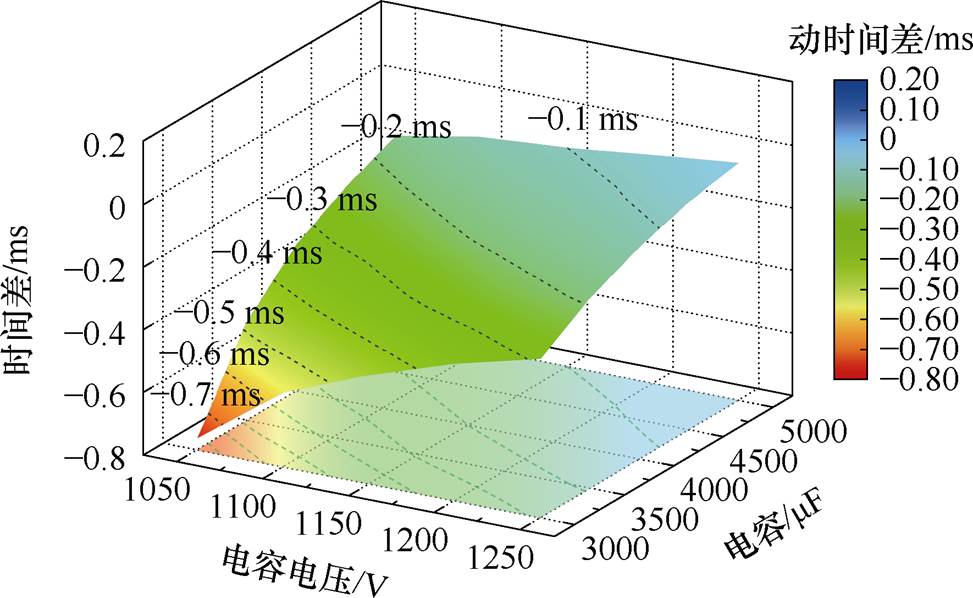
(c)去磁线圈22匝
图15 不同去磁线圈匝数下动作时间差
Fig.15 Action time difference under different demagnetization coil turns
分析电容参数改变对动作时间差变化规律的影响,从图15中可以看出,不同去磁线圈匝数下,随着电容及电容电压的增大,动作时间差的增幅逐渐减小,最终趋于零。由此可见,存在电容参数的饱和效应,当电容容量或电容电压提高至一定值时,动作时间差达到平稳,无法继续增加,且去磁线圈匝数越小,达到饱和的电容参数越小。
根据上述分析,可得去磁线圈匝数21匝,电容4 000 mF,电容电压1 200 V时,其位移与速度曲线如图16所示,单斥力机构与双斥力机构动作时间分别为2.01 ms与2.02 ms,时间差为0.01 ms,末速度分别为7.78 m/s与7.10 m/s,满足动作时间差小且快速动作的设计需求。

图16 位移与速度曲线
Fig.16 Displacement and velocity curves
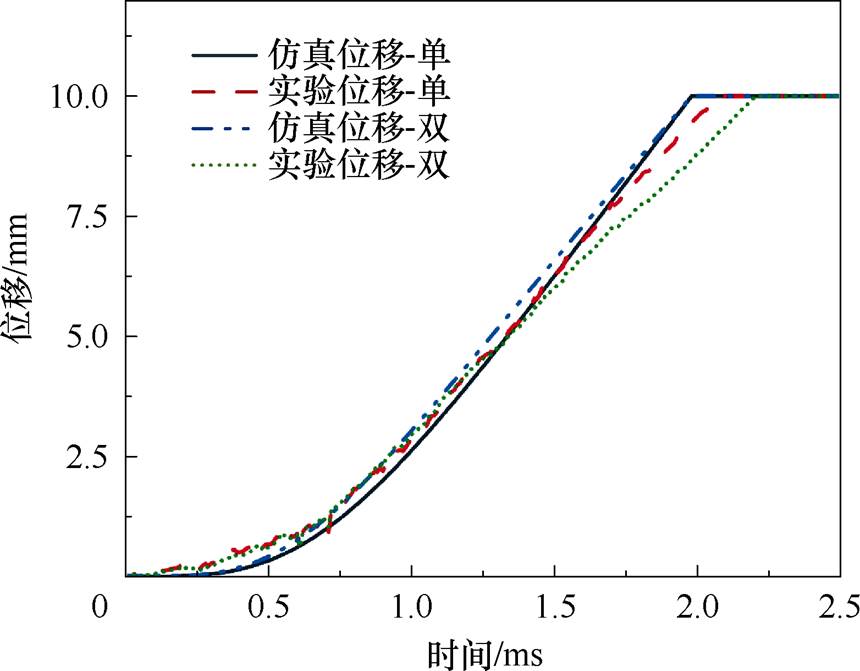
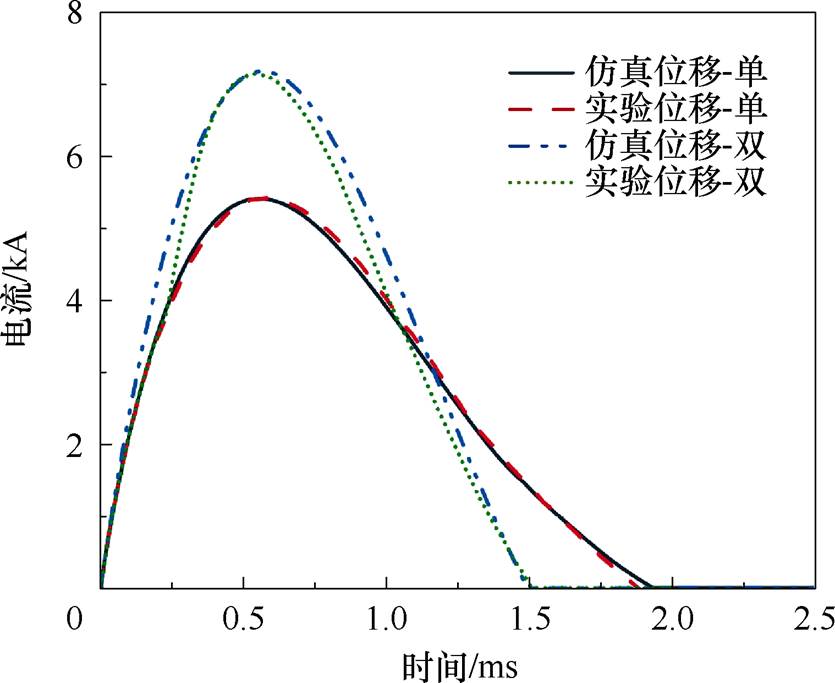
基于仿真分析结果,研制基于去磁线圈的双冗余斥力机构如图17a所示,图17b分别为去磁线圈与斥力线圈,由环氧树脂浇注。本文实验为验证去磁线圈设计对减小动作时间差的功能,对斥力机构进行测试,在其下方添加与控制阀质量相同的负载,在电容4 000 mF,电容电压1 200 V下,通过位移传感器测量斥力机构动作位移,罗氏线圈测量电容电流,结果如图18所示。实验与仿真对比,电流峰值与脉宽几乎一致,单斥力机构与双斥力机构动作时间分别为2.07 ms与2.22 ms,时间差为0.15 ms,与仿真分析0.01 ms有一定误差,可能由于仿真中DT4线圈盘的B-H曲线设置与实际存在偏差,影响线圈盘内部磁场,但误差较小。通过仿真与实验验证其设计能够有效减小动作时间差,证明了理论分析设计方案的有效性。

(a)样机实物 (b)去磁线圈与斥力线圈
图17 基于去磁线圈的双冗余斥力脱扣装置
Fig.17 Dual redundant repulsive force release device based on demagnetization coil
(a)位移曲线
(b)电流曲线
图18 仿真与实验对比
Fig.18 Comparison between simulation and experiment
1)本文设计了一种抑制脱扣时间差、保障快速断路器分闸稳定性的双冗余斥力操动机构,提出了去磁线圈磁场耦合的方法,能够有效减小单斥力机构与双斥力机构的动作时间差。
2)去磁线圈对单斥力机构动作时间影响较小,对双斥力机构动作时间影响较大,通过增大去磁线圈匝数、减小电容容量、减小电容电压的措施能够减小动作时间差,但调整电容参数存在饱和效应,随着去磁线圈匝数增加,动作时间差关于电容参数的敏感程度逐渐增大。
3)去磁线圈匝数21,电容4 000 mF,电容电压1 200 V时,在实验下,单斥力机构与双斥力机构动作时间分别为2.07 ms与2.22 ms,时间差为0.15 ms,有效减小了动作时间差,验证了仿真的准确性。
参考文献
[1] 赵国亮, 陈维江, 邓占锋, 等. 柔性低频交流输电关键技术及应用[J]. 电力系统自动化, 2022, 46(15): 1-10.
Zhao Guoliang, Chen Weijiang, Deng Zhanfeng, et al. Key technologies and application of flexible low- frequency AC transmission[J]. Automation of Electric Power Systems, 2022, 46(15): 1-10.
[2] 李根, 杜志叶, 肖湃, 等. 海上风电送出J型管段海底电缆载流量计算模型研究[J]. 电工技术学报, 2023, 38(13): 3619-3629.
Li Gen, Du Zhiye, Xiao Pai, et al. Study on calculation model of submarine cable ampacity in J-tube section of offshore wind power transmission[J]. Transactions of China Electrotechnical Society, 2023, 38(13): 3619-3629.
[3] 高晨, 赵勇, 汪德良, 等. 海上风电机组电气设备状态检修技术研究现状与展望[J]. 电工技术学报, 2022, 37(增刊1): 30-42.
Gao Chen, Zhao Yong, Wang Deliang, et al. Research status and prospect of condition based maintenance technology for offshore wind turbine electrical equipment[J]. Transactions of China Electrotechnical Society, 2022, 37(S1): 30-42.
[4] 刘士利, 罗英楠, 刘宗烨, 等. 基于电磁-热耦合原理的三芯铠装电缆在低频输电方式下的损耗特性研究[J]. 电工技术学报, 2021, 36(22): 4829-4836.
Liu Shili, Luo Yingnan, Liu Zongye, et al. Study on loss characteristics of three core armored cable under low-frequency transmission mode based on electro- magnetic, thermal coupling principle[J]. Transactions of China Electrotechnical Society, 2021, 36(22): 4829-4836.
[5] 刘云鹏, 赵家莹, 刘贺晨, 等. 低频电压下含纤维素颗粒变压器油绝缘特性及影响因素[J]. 电工技术学报, 2024, 39(4): 1198-1207.
Liu Yunpeng, Zhao Jiaying, Liu Hechen, et al. Insulation characteristics and influencing factors of transformer oil containing cellulose particles under low-frequency voltage[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 1198-1207.
[6] 孙雷强, 庄劲武, 王冲, 等. 基于联合仿真的断路器合闸电磁铁的动态特性研究[J]. 电气工程学报, 2023, 18(1): 104-110.
Sun Leiqiang, Zhuang Jinwu, Wang Chong, et al. Research on dynamic characteristics of circuit breaker’s closing electromagnet based on co- simulation[J]. Journal of Electrical Engineering, 2023, 18(1): 104-110.
[7] 何俊佳, 袁召, 经鑫, 等. 电磁斥力机构研究综述[J]. 高电压技术, 2017, 43(12): 3809-3818.
He Junjia, Yuan Zhao, Jing Xin, et al. Review of research on repulsion mechanism[J]. High Voltage Engineering, 2017, 43(12): 3809-3818.
[8] 田宇, 朱苛娄, 许家源, 等. 10 kV快速分相断路器样机研制[J]. 电网技术, 2015, 39(8): 2346-2350.
Tian Yu, Zhu Kelou, Xu Jiayuan, et al. Development of 10 kV high-speed vacuum breaker prototype[J]. Power System Technology, 2015, 39(8): 2346-2350.
[9] 娄杰, 李庆民, 孙庆森, 等. 快速电磁推力机构的动态特性仿真与优化设计[J]. 中国电机工程学报, 2005, 25(16): 23-29.
Lou Jie, Li Qingmin, Sun Qingsen, et al. Dynamic characteristics simulation and optimal design of the fast electromagnetic repulsion mechanism[J]. Pro- ceedings of the CSEE, 2005, 25(16): 23-29.
[10] Zhu Zhexiao, Yuan Zhao, Chen Lixue, et al. Vibration characteristics of Thomson coil actuator based on simulation and experiments[J]. IEEE Transactions on Energy Conversion, 2020, 35(3): 1228-1237.
[11] 田宇, 王利, 田阳, 等. 直流断路器用快速开关多场联合仿真优化方法[J]. 高电压技术, 2019, 45(1): 55-62.
Tian Yu, Wang Li, Tian Yang, et al. Multi-field co- simulation optimization method for high-speed switch in DC circuit breaker[J]. High Voltage Engineering, 2019, 45(1): 55-62.
[12] 王立军, 王宏达, 马金伟, 等. 40.5 kV/50 kA真空开关用双层线圈式快速斥力机构驱动技术的仿真研究[J]. 高压电器, 2023, 59(6): 25-32.
Wang Lijun, Wang Hongda, Ma Jinwei, et al. Simulation research on driving technology of double- layer coil fast repulsive mechanism for 40.5 kV/50 kA vacuum switch[J]. High Voltage Apparatus, 2023, 59(6): 25-32.
[13] 董恩源, 刘罡, 邹启涛, 等. 长行程断路器操动用新型磁力机构[J]. 高电压技术, 2010, 36(3): 816- 820.
Dong Enyuan, Liu Gang, Zou Qitao, et al. New type magnetic force actuator (MFA) for long stroke circuit breaker[J]. High Voltage Engineering, 2010, 36(3): 816-820.
[14] 刘晓明, 张煦松, 姜文涛, 等. 基于混沌吸引子的真空断路器永磁斥力机构机械故障识别方法[J]. 电工技术学报, 2022, 37(20): 5334-5346.
Liu Xiaoming, Zhang Xusong, Jiang Wentao, et al. A method of mechanical fault identification of per- manent magnet repulsion mechanism of vacuum circuit breaker based on chaos attractor[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(20): 5334-5346.
[15] 张修雅, 袁召, 陈立学, 等. 电磁斥力机构能量转换效率分析[J]. 电网技术, 2019, 43(5): 1849-1855.
Zhang Xiuya, Yuan Zhao, Chen Lixue, et al. Study of energy conversion efficiency of electromagnetic repulsion mechanism[J]. Power System Technology, 2019, 43(5): 1849-1855.
[16] 张力, 阮江军, 黄道春, 等. 双盘式线圈结构快速斥力机构设计与运动特性仿真研究[J]. 电工技术学报, 2018, 33(2): 255-264.
Zhang Li, Ruan Jiangjun, Huang Daochun, et al. Study on the design and movement characteristics simulation of a fast repulsion mechanism based on double-coil structure[J]. Transactions of China Elec- trotechnical Society, 2018, 33(2): 255-264.
[17] 黎嘉浩, 庄劲武, 武瑾, 等. 微型高速电磁斥力机构设计[J]. 高电压技术, 2021, 47(12): 4349-4356.
Li Jiahao, Zhuang Jinwu, Wu Jin, et al. Design of miniature high speed electromagnetic repulsion mechanism[J]. High Voltage Engineering, 2021, 47(12): 4349-4356.
[18] 朱哲晓, 袁召, 陈立学, 等. 电磁斥力机构结构应力分析与优化设计[J]. 高电压技术, 2020, 46(8): 2692-2699.
Zhu Zhexiao, Yuan Zhao, Chen Lixue, et al. Stru- ctural stress analysis and optimization design of electromagnetic repulsion mechanism[J]. High Voltage Engineering, 2020, 46(8): 2692-2699.
[19] 王汝凡, 王德全, 邱军, 等. 快速开关多场协同仿真下的应力与形变研究[J]. 电网技术, 2021, 45(7): 2913-2923.
Wang Rufan, Wang Dequan, Qiu Jun, et al. Research on stress and deformation under multi-field cooperative simulation of fast switch[J]. Power System Technology, 2021, 45(7): 2913-2923.
[20] 程显, 赵海洋, 葛国伟, 等. 基于螺线管和线圈盘的新型混合式斥力机构分析[J]. 电工技术学报, 2020, 35(14): 2997-3006.
Cheng Xian, Zhao Haiyang, Ge Guowei, et al. Analysis of the new hybrid repulsion mechanism based on series-connected solenoid and coil plate[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 2997-3006.
[21] 郭兴宇, 梁德世, 黄智慧, 等. 基于多场耦合的电磁斥力机构运动参数研究[J]. 高电压技术, 2022, 48(2): 626-635.
Guo Xingyu, Liang Deshi, Huang Zhihui, et al. Research on motion parameters of electromagnetic repulsion mechanism based on multi-field coupling[J]. High Voltage Engineering, 2022, 48(2): 626-635.
[22] 温伟杰, 李斌, 李博通, 等. 基于双向电磁斥力机构的高压快速开关缓冲特性研究[J]. 电工技术学报, 2019, 34(7): 1449-1458.
Wen Weijie, Li Bin, Li Botong, et al. Research on the buffering characteristics of high voltage fast mechani- cal switch based on bi-directional electromagnetic repulsion mechanism[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 1449-1458.
[23] 张烈, 王德林, 刘亚东, 等. 国家电网220 kV及以上交流保护十年运行分析[J]. 电网技术, 2017, 41(5): 1654-1659.
Zhang Lie, Wang Delin, Liu Yadong, et al. Analysis on protective relaying and its operation conditions in 220 kV and above AC system of SGCC in past ten years[J]. Power System Technology, 2017, 41(5): 1654-1659.
[24] 吴少斌, 陈小琪. 双重化继电保护隐性故障风险评估研究[J]. 通信电源技术, 2018, 35(10): 17-19.
Wu Shaobin, Chen Xiaoqi. Research on risk assessment of double faults for relay protection[J]. Telecom Power Technology, 2018, 35(10): 17-19.
Abstract Flexible low-frequency transmission is a new AC transmission technology that transmits 20 Hz. It can reduce reactance, increase transmission power and distance, and solve the long-distance, large-capacity transmission problem of offshore wind power. Flexible low-frequency transmission is a supplement to power frequency AC and DC transmission, which can also be applied to power grid security interconnection, multi-island interconnection, cable-based urban power supply, and other scenarios.
Conventional SF6 circuit breaker trips using ordinary solenoid valve with a tripping time of about 11~14 ms, existing action delay. Fast SF6 circuit breaker controls valve spool through the electromagnetic repulsion force to drive the fast action, greatly reducing the action time to less than 2 ms. It can alleviate the problems of long arcing time and considerable energy needed to break the arc, which improves the circuit breaker’s breaking capacity. Combined with the fast circuit breaker and the phase-selecting opening technology, accurately predicting the zero-crossing point of the short-circuit fault current effectively reduces the arcing time and successfully breaks in the short arcing time. In addition, the influence of the current frequency on the breaking time of the short-circuit fault is reduced. The fast circuit breaker of 220 kV and above voltage level often adopts a double relay protection device and double tripping mode. A time difference between its action time and single tripping affects the accuracy of phase selection and opening.
Based on the coupling relationship of the magnetic field, this paper proposes a method to reduce the action time difference using a demagnetization coil and designs a double redundant repulsion mechanism. The opening process involves multi-physical field coupling, such as magnetic field coupling, eddy current loss, loop discharge, and mechanical motion. The physical quantities (magnetic induction intensity, electromagnetic field energy, electromagnetic force, and inductance) are derived by calculating the electromotive and magnetomotive forces. The multi-factor coupling influence of capacitance voltage, capacitance, and demagnetization coil turns on the action time difference is analyzed, and the optimal design parameters are obtained. The results show that the design of the demagnetization coil can effectively reduce the action time difference of a fast circuit breaker.
According to the simulation analysis, a double redundant repulsion mechanism based on a demagnetization coil is developed. Under the capacitance voltage of 1 200 V and the capacitance capacity of 4 000 mF, the peak current and pulse width of the experiment and simulation are almost the same. The action time of the single repulsion mechanism and the double repulsion mechanism is 2.07 ms and 2.22 ms, respectively, and the time difference is 0.15 ms. The simulation and experiment verify that the theoretical analysis and design scheme.
keywords:Fast circuit breaker, electromagnetic repulsion mechanism, repulsive release hydraulic mechanism, demagnetizing coil
DOI: 10.19595/j.cnki.1000-6753.tces.240036
中图分类号:TM561
国家电网公司总部科技资助项目(5108-202218280A-2-339-XG)。
收稿日期 2024-01-06
改稿日期 2024-02-05
尹 升 男,1998年生,博士研究生,研究方向快速断路器快速脱扣技术。E-mail: yinsheng@mail.dlut.edu.cn
董恩源 男,1973年生,教授,博士生导师,研究方向为智能化高压电器等。E-mail: dey@dlut.edu.cn(通信作者)
(编辑 崔文静)