图1 光伏并网储能系统整体结构
Fig.1 Overall structure of photovoltaic energy storage system
摘要 由于光照强度等不可控因素的影响,光伏模块输出功率具有较大的随机性,容易降低光储并网系统的暂态性能。为此,该文在光储一体化变流器中提出了一种改进滑模自抗扰控制(SM-ADRC)策略以降低暂态时的直流母线电压波动并加快功率响应速度。首先,针对传统扩张状态观测器(ESO)对状态变量和扰动观测精度不足的问题,引入新的误差作为ESO的调节依据以提升跟踪能力;其次,将反步设计和互补滑模控制相结合运用到状态误差反馈律中,以提升控制系统的鲁棒性,并通过改进指数趋近律减小滑模固有的抖振现象;再次,从理论上证明了基于改进指数趋近律的反步互补滑模(BCSMC)和改进ESO的稳定性以及改进ESO的误差范围;最后,通过仿真和StarSim实验平台对比在不同工况下的直流母线波动情况和功率响应速度,验证了所提改进SM-ADRC策略相比于传统SM-ADRC策略和PI控制策略的优越性和可行性。
关键词:光储一体化变流器 自抗扰控制 反步设计 互补滑模控制 改进指数趋近律
进入21世纪以后,人们对能源的需求越来越大,然而石油和煤等传统不可再生能源短缺的问题却日益凸显。因此,急需寻求新型可再生能源替代传统能源[1-2]。随着“双碳”目标的提出,我国不断加深了对太阳能等清洁能源的研究[3],但由于季节、天气和温度等不可控因素影响,光伏阵列的输出功率具有较大的波动性,直接并入电网或给负载供电会降低电能质量,造成负荷发热和直流母线波动,从而缩短了设备使用寿命。近年来不少学者提出建立储能电站以提高电网的稳定性。
在光储并网系统中,光伏和储能电池通过直流母线耦合的光储一体化变流器是储能系统的重要组成成分。由于其具有多输入输出、非线性、强耦合的特点[4],传统的PI控制参数难以整定,不能达到理想的控制效果。针对光储一体化变流器需要高精度、快响应的要求,学者们提出了许多控制方法,如滑模控制[5]、自抗扰控制(Active Disturbance Rejection Control, ADRC)[6]、无源控制[7]及模型预测控制[8]等。其中,ADRC以扩张状态观测器(Extended State Observers, ESO)为核心,具有不依赖精确数学模型、抗干扰能力强等优势,引起学者们的广泛研究。
随着ADRC在电力电子领域的迅速发展,一部分学者提出了将ADRC与滑模控制相结合的策略,如文献[9]针对风电并网波动严重会造成电网调频效果不佳的问题,将变增益滑模和线性自抗扰相结合提高了火力发电系统的调频能力;文献[10]将积分滑模和ADRC相结合,提高了压电纳米定位阶段的跟踪性能;文献[11]提出了一种基于自适应滑模的ADRC,有效解决了航天器的姿态跟踪问题。上述文献将ADRC中反馈补偿替换为滑模控制,能有效提高系统抗扰动能力,消除系统的扰动。但是滑模控制会引起抖振,如何削弱抖振是滑模控制中最为关键的问题。另外一部分学者从观测器出发提高ADRC的性能,例如,文献[12]将总扰动微分引入ESO设计中有效提高了光伏微网系统对低频扰动的抑制能力,但在提升扰动观测能力的同时也降低了对高频噪声的抑制能力;文献[13]利用级联的LESO提升了LADRC对斜坡扰动的估计和补偿能力,提高了Buck变换器的输出电压稳定性,但级联会使系统复杂度增加一倍,不利于工程实际;文献[14]将非线性ESO加入ADRC中提高无人驾驶控制性能,但非线性ESO参数较多调节困难。
近年来,反步设计法逐渐运用于Boost变换器[15]、双电机[16]、二自由度云台[17]等系统中,其核心思想是将非线性系统通过中间虚拟变量转化为多个低阶子系统简化控制设计过程,且系统的非匹配扰动在每步虚拟控制器设计中都可视为匹配扰动处理[18-19]。将滑模控制和反步法相结合能减小滑模面的设计难度,并消除非匹配扰动对系统输出的影响,提升系统鲁棒性[20]。
根据上述研究成果,本文提出了一种基于反步互补滑模控制(Backstepping Complementary Sliding Mode Control, BCSMC)的改进滑模自抗扰控制(Sliding Mode Active Disturbance Rejection Control, SM-ADRC)策略,并将其应用于光储一体化变流器设计中。该控制器在ESO中引入新的误差项以提高对状态变量和扰动的观测精度;在状态误差反馈律中结合反步设计理论和滑模控制理论组成BCSMC方法代替传统互补滑模控制以提高系统全局鲁棒性,并设计改进指数趋近律以减小滑模固有的抖振现象。
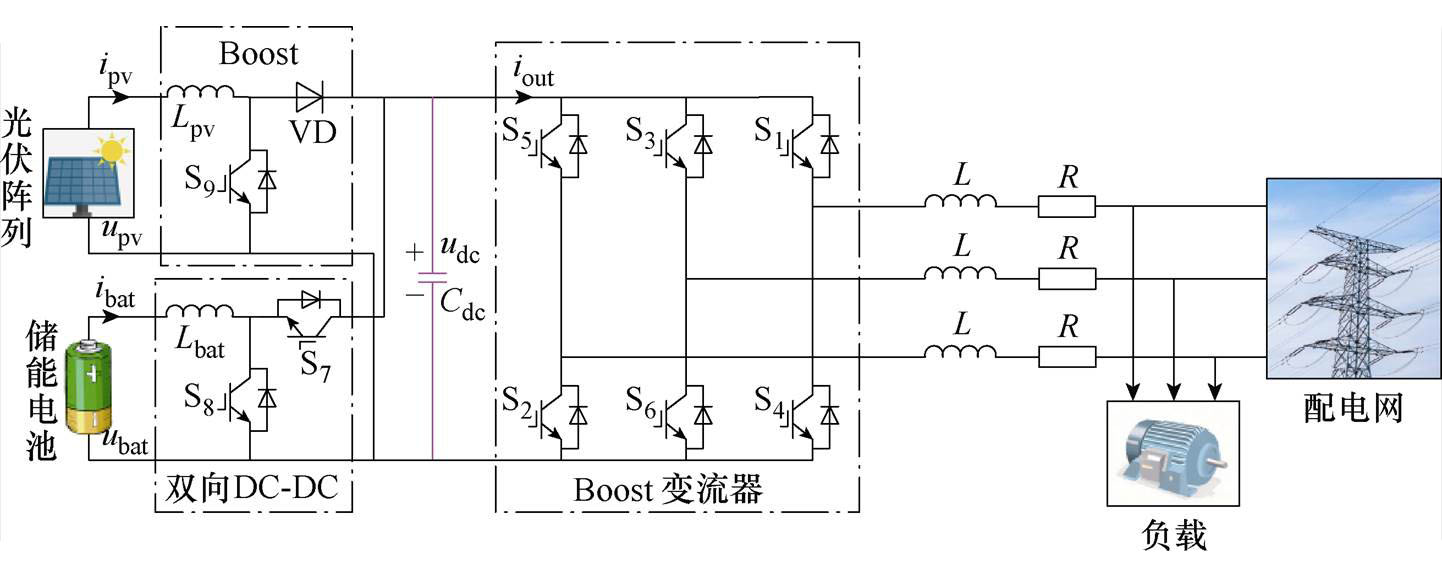
光伏并网储能系统的整体结构如图1所示,由光伏阵列单元、储能电池单元、Boost变换器单元、双向DC-DC变换器单元、变流器单元、交流负载单元和配电网单元构成。光伏阵列经过Boost变换器控制后连接到直流母线实现最大功率追踪;储能电池通过双向DC-DC变换器与直流母线相连实现能量的双向流动;直流与交流部分通过变流器相连。光储一体化变流器由Boost变换器、双向DC-DC变换器和变流器组成,其中S1~S6为变流器的开关管,S7、S8为双向DC-DC变换器的一对互补导通开关管,S9为Boost变换器的开关管;VD为二极管;R为电路等效电阻,L为交流侧滤波电感;Cdc为直流侧稳压电容,udc为直流母线电压;Lbat为双向DC-DC变换器的电感,Lpv为Boost变换器的电感;ubat为电池输出电压,upv为光伏阵列输出电压;ibat为电池输出电流,ipv为光伏阵列输出电流;iout为直流母线输入到变流器中的电流。
图1 光伏并网储能系统整体结构
Fig.1 Overall structure of photovoltaic energy storage system
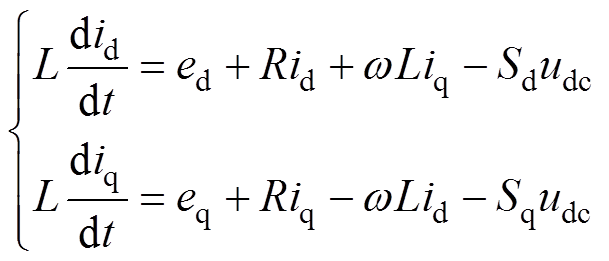
由于Boost变换器受最大功率点跟踪(Maximum Power Point Tracking, MPPT)算法控制,因此本文的目标为对光储一体化变流器其余两部分进行改进,即双向DC-DC变换器和变流器。由图1可知,变流器部分在两相旋转dq轴坐标系下的数学模型为
 (1)
(1)
式中,w 为电网电压的角频率;id、iq分别为变流器交流侧在d轴、q轴上电流;Sd、Sq分别为变流器交流侧在d轴、q轴上开关函数;ed、eq分别为电网电压在d轴和q轴上的分量。
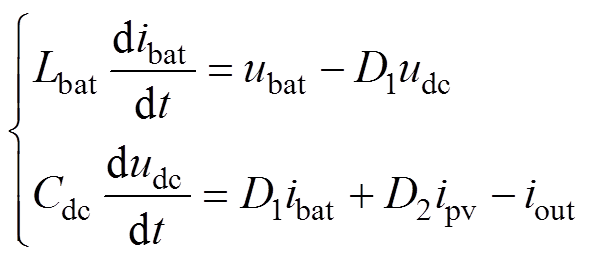
根据基尔霍夫定律可得双向DC-DC变换器的状态空间平均方程为
 (2)
(2)
式中,D1为开关管S7的导通占空比;D2为开关管S9的关断占空比。
由式(1)和式(2)可知,光储一体化变流器是一个多变量、强耦合的系统,传统的控制方法不能满足响应速度快、精度高、超调小的需求,功率的频繁波动会影响并网质量,并造成直流母线电压波动[21]。因此,本文提出了一种改进SM-ADRC策略以提升光储一体化变流器的性能。
定义一个控制对象为
 (3)
(3)
式中,y为系统的输出;u为系统的输入控制;b为控制量的增益;f为系统的内外总扰动。
SM-ADRC的改进思路如图2所示。图2中,传统SM-ADRC采用ESO估计系统的状态变量和总扰动,采用互补滑模作为状态误差反馈律。为了提升状态变量和扰动估计的速度和准确度,本文对ESO进行了改进,为了提高系统的鲁棒性并减小滑模所固有的抖振现象,本文采用改进指数趋近律的BCSMC作为状态误差反馈律,最终得出了改进的SM-ADRC。
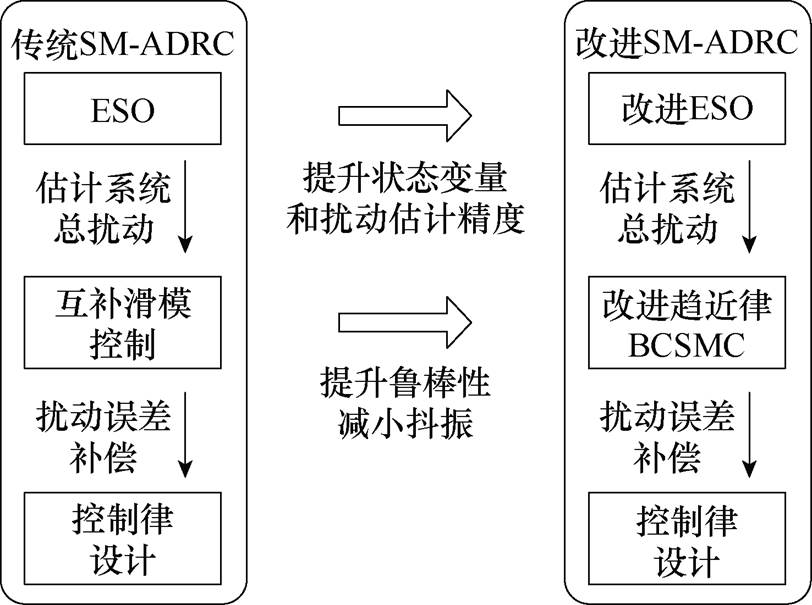
图2 SM-ADRC改进思路
Fig.2 SM-ADRC improvement idea
2.1.1 改进ESO设计
式(3)中,b的值可能是未知的,设b0为控制量增益b的估计值、yref为输出目标值、e为系统状态误差,式(3)可变为
 (4)
(4)
定义状态变量 、
、 、
、 ,则式(4)所示系统的状态方程为
,则式(4)所示系统的状态方程为
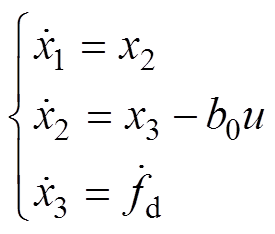 (5)
(5)
在ADRC设计中,ESO能否对状态变量及总扰动做到精确估计是影响系统性能的重要因素。定义z1、z2和z3分别为x1、x2和x3的观测值,传统的ESO通过减小x1与z1之间的误差来跟踪x2和x3,即当z1趋近于x1之后,再使z2和z3趋近于x2和x3,这就会使得状态变量x2和x3的观测存在滞后,对系统总扰动观测存在残留。为解决该问题,本文引入x2与z2之间的误差,对式(5)所示状态方程设计改进ESO为
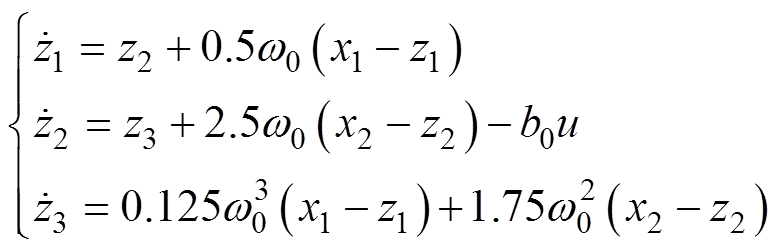 (6)
(6)
式中,w0为观测器带宽。
建立式(6)所示观测器需要知道x1和x2,然而工程上x2的具体数值往往是不知道的,为解决这一问题,根据式(6)将x2变换为
 (7)
(7)
由式(6)和式(7)可得改进ESO的结构如图3所示。
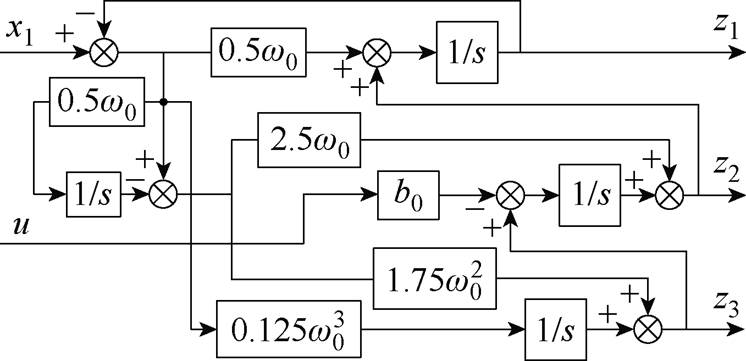
图3 改进ESO结构框图
Fig.3 Improved ESO block diagram
2.1.2 改进ESO仿真分析
对式(6)应用Laplace变换,可推导出改进ESO的状态变量和扰动估计误差传递函数为
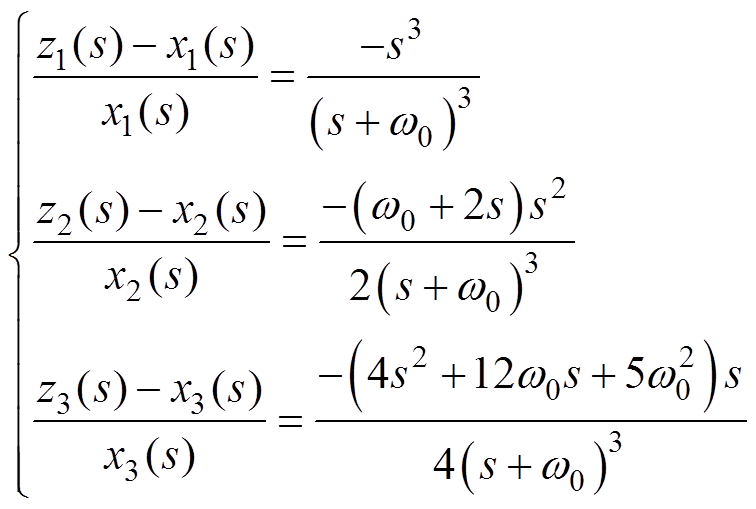 (8)
(8)
由式(8)可知,与传统ESO相比[22],改进后的ESO对状态变量x1的观测误差与传统ESO相同,而对状态变量x2和x3的观测误差有所减少。为了验证本文改进ESO的有效性,图4绘制了在不同观测器带宽下,传统ESO和改进ESO的阶跃扰动和斜坡扰动时域响应曲线对比。由图4a和图4b可知,无论是在单位阶跃扰动还是单位斜坡扰动作用下,改进后的ESO对x2的观测速度更快,减小了观测滞后误差。由图4c可知,传统ESO和改进ESO在估计单位阶跃扰动时,均可对总扰动x3实现无差估计,但改进ESO的估计速度明显更快,由图4d可知,传统ESO和改进ESO在估计单位斜坡扰动时,均存在一定的扰动误差,但在相同带宽下改进ESO明显具有更小的稳态误差,也即改进ESO有效提高了扰动估计精度。
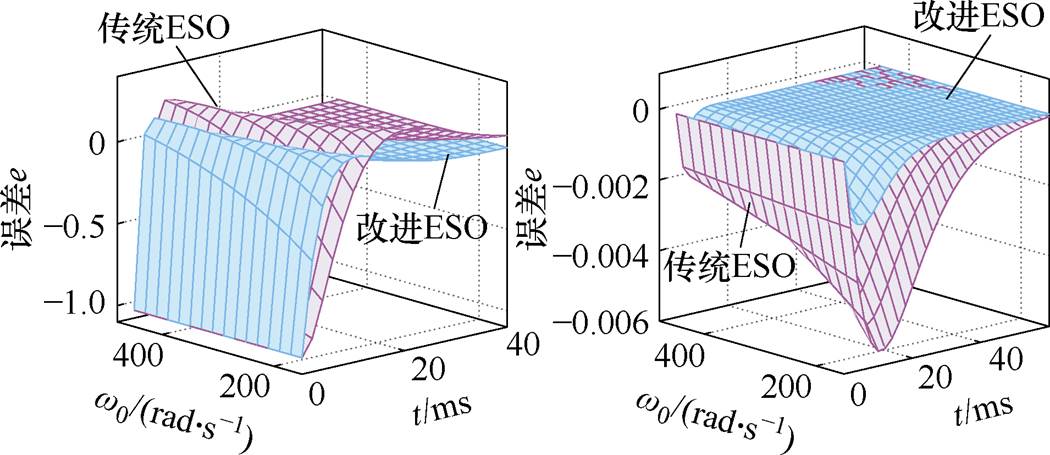
(a)x2单位阶跃响应 (b)x2单位斜坡响应
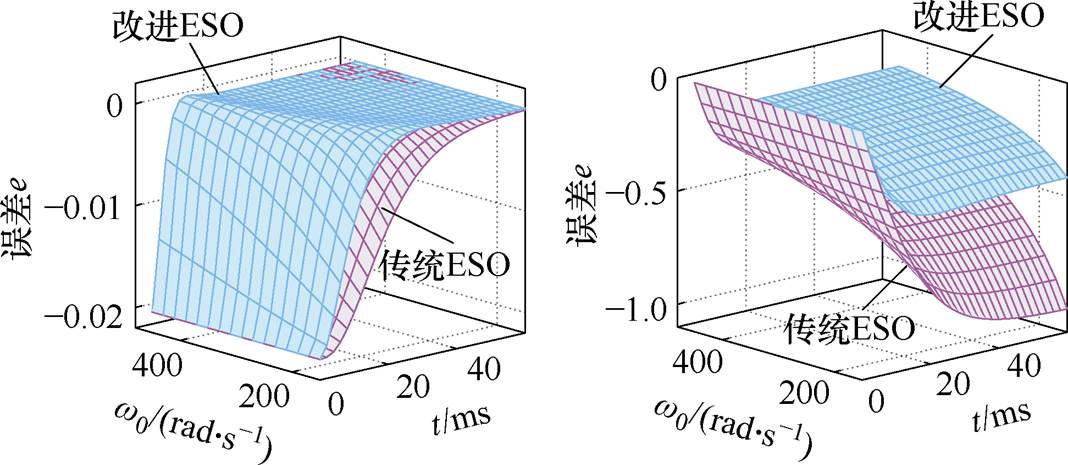
(c)x3单位阶跃响应 (d)x3单位斜坡响应
图4 不同观测器带宽下扰动观测误差时域曲线
Fig.4 Time domain curve of perturbed observation error with different observer bandwidth
通过上述分析,改进ESO对x2和x3的估计速度更快、估计精度更高,有效地改善了ADRC的性能。
2.2.1 BCSMC设计
状态误差反馈律的作用是使系统在受到扰动后仍可以快速收敛。为了提升系统的鲁棒性,本文将互补滑模控制和反步控制相结合构成新型状态误差反馈律,具体改进如下。
根据反步法的递归设计思想,定义一个虚拟控制变量p为
 (9)
(9)
式中,a为常数。
选取Lyapunov函数V1为
 (10)
(10)
将式(4)和式(9)代入式(10)并求导可得
 (11)
(11)
令 ,
, 为常数,则有
为常数,则有 ,式(11)可变为
,式(11)可变为
 (12)
(12)
由式(10)和式(12)可知,当p收敛至0时,系统稳定,因此状态误差反馈律的设计可简化为对虚拟控制量p的控制,定义广义滑模面dg为
 (13)
(13)
式中,h为常数,设计与dg正交的互补滑模面dc为
 (14)
(14)
则滑模面d 可表示为
 (15)
(15)
基于等效控制方法,设计等效控制律ueq为
 (16)
(16)
设计切换控制律usw为
 (17)
(17)
式中, ,e、q为常数。
,e、q为常数。
联立式(16)和式(17)可得输入控制u为
 (18)
(18)
式中, 。
。
因此,可设计BCSMC结构框图为图5所示。
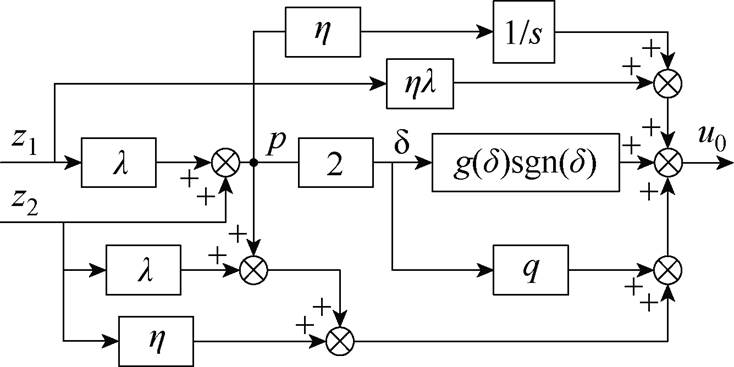
图5 BCSMC结构框图
Fig.5 BCSMC block diagram
在式(17)所示切换控制律中,为缩短滑模面趋近时间,本文选用指数趋近律保证较快的收敛速度,传统的指数趋近律表示为
 (19)
(19)
式中,sgn(×)为符号函数;e 为常数。
传统指数趋近律e 选取过大会使得到达切换面的速度过快导致系统产生较大的抖振,e 选取过小又会使收敛速度过慢增加调节过程时间。针对这一问题,本文设计改进指数趋近律为
 (20)
(20)
式中,g(d)、q的含义同式(17)。
对比式(19)和式(20)可知,用函数g(d) 代替参数e,当滑模函数远离滑模面时,g(d) 远大于e,有效提升了趋近速度;而当滑模函数接近滑模面时,改进指数趋近律的符号函数增益仅为2/e,达到减小抖振的目的。
2.2.2 BCSMC仿真分析
为验证本文所提滑模控制的有效性,参照式(3),以典型二阶系统为例进行仿真分析。系统设计如下
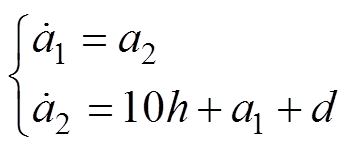 (21)
(21)
式中,a1和a2为状态变量;h为输入变量;d为系统扰动。
分别采用基于传统指数趋近律的互补滑模控制、基于传统指数趋近律的BCSMC和基于改进指数趋近律的BCSMC时,式(21)所示系统的控制律设计表达式以及参数选择见附录。设a1的参考值为aref,取指令信号aref=sint,被控对象初始状态a1=2,d=10sin(pt)。在三种控制策略下的控制性能对比如图6和图7所示。
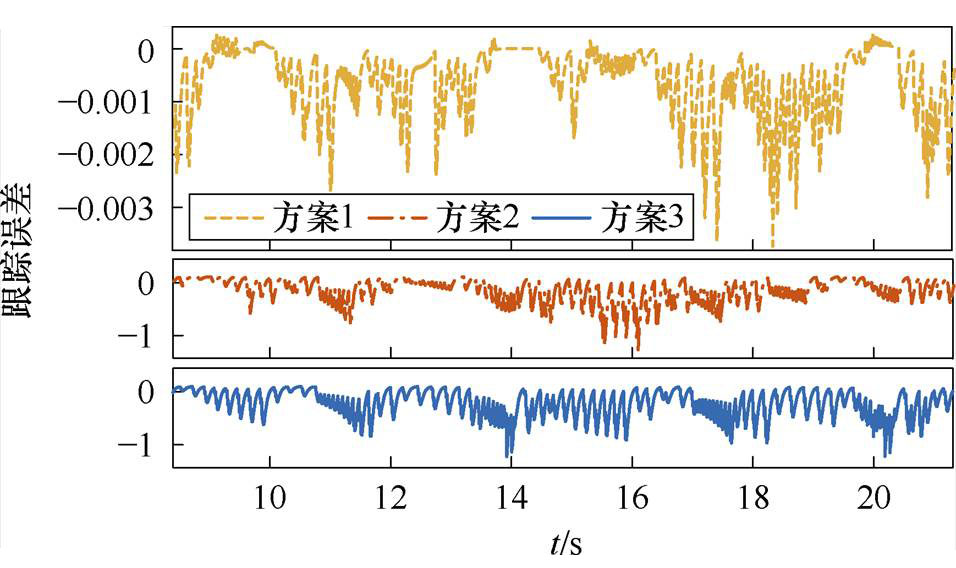
图6和图7中,方案1为互补滑模控制、方案2为BCSMC、方案3为改进指数趋近律的BCSMC。由图6可知,与互补滑模控制相比,BCSMC有效提高了系统的收敛精度,证明了BCSMC的强鲁棒性。但图7中BCSMC的抖振现象依然较为严重,为此,本文通过改进指数趋近律有效减小了滑模抖振现象,且通过图6可知改进指数趋近律后仍有较高的收敛精度。
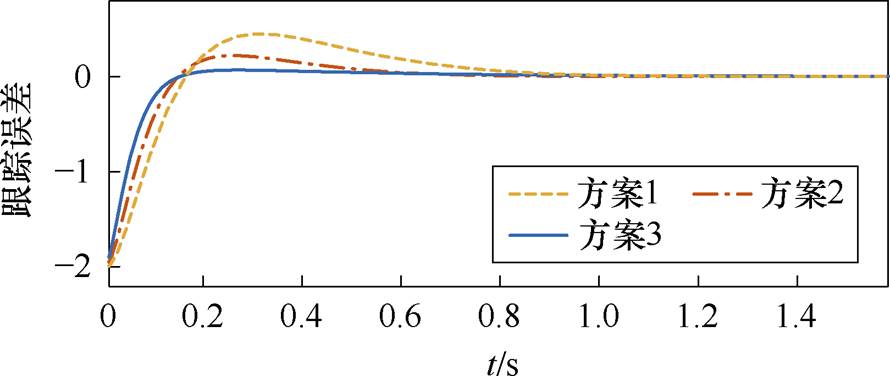
(a)启动阶段
(b)稳态阶段
图6 控制精度对比
Fig.6 Comparison of control accuracy
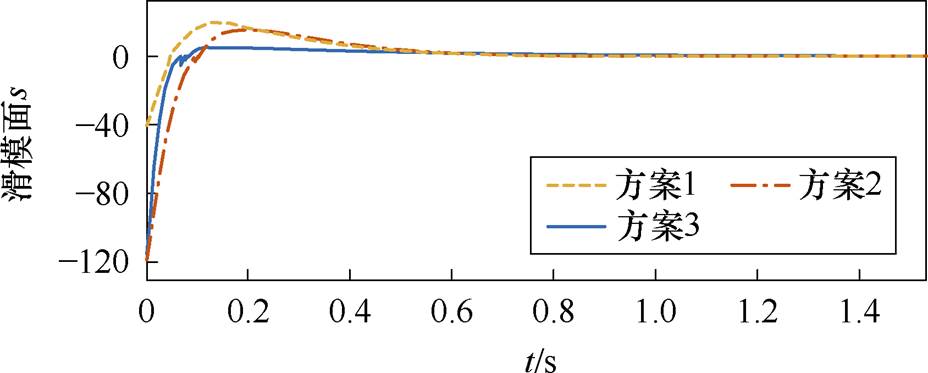
(a)启动阶段
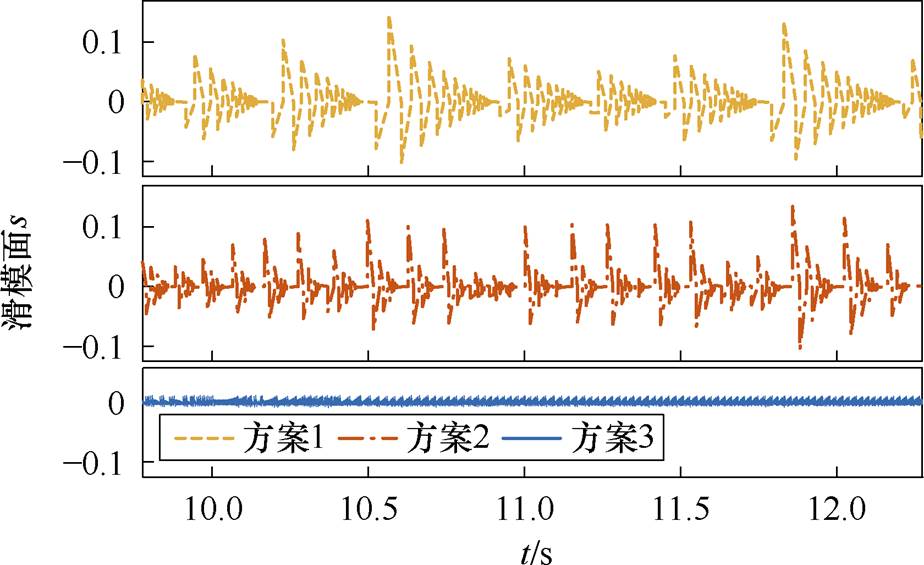
(b)稳态阶段
图7 滑模抖振对比
Fig.7 Comparison of position tracking errors
基于以上分析可得本文所设计的改进SM- ADRC整体结构如图8所示,图中改进ESO的具体形式与图3相同,BCSMC的具体形式与图5相同。由图8可知,若一个控制对象能表述为式(3)所示形式,则可以设计出本文所提改进SM-ADRC策略。
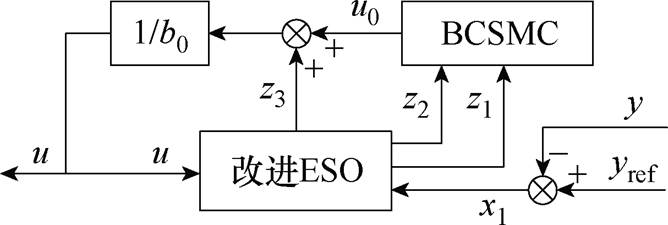
图8 改进SM-ADRC整体结构框图
Fig.8 Improved SM-ADRC overall structure block diagram
求解式(6)所示状态方程的特征多项式为
 (22)
(22)
由于w0>0,因此系统的极点均在左半平面,所设计的观测器稳定。当系统进入稳态后,设存在常数h使得 ,联立式(5)和式(6)可得改进ESO的观测误差范围为
,联立式(5)和式(6)可得改进ESO的观测误差范围为
 (23)
(23)
由式(23)可知,随着观测器带宽w0的增大,ESO的各阶状态观测误差会减小,但过高的w0会引入更多的高频噪声,因此在实际应用中w0需要综合考虑跟踪精度和噪声抑制两方面。
选取能量函数 ,将能量函数V对时间求导可得
,将能量函数V对时间求导可得
 (24)
(24)
式中, ,式(24)可化简为
,式(24)可化简为
 (25)
(25)
当且仅当d=0时,有 。
。
因此,本文所设计的趋近律满足存在及可达性条件,即滑模变量d 可以收敛至平衡点,也即虚拟控制变量p可以收敛到零,系统稳定。
变流器部分用以控制光储一体化变流器输出的功率大小,采用功率外环和电流内环控制。设光储一体化变流器发出的有功功率和无功功率参考值分别为Pref、Qref,功率外环可设计为
 (26)
(26)
式中,idref和iqref分别为id和iq的参考值。
电流内环采用本文第2节所提控制方法,对式(1)中的id、iq求二阶导可得
 (27)
(27)
式中,fd、fq表示为

vd、vq表示为
式(27)与式(3)具有相同的结构,令id和iq为输出量y,vd和vq为控制输入量u,idref和iqref为输出量参考值yref,则电流内环d轴和q轴可分别设计为图8所示SM-ADRC策略。
在光储一体化变流器中,双向DC-DC变换器主要用以维持直流母线电压的恒定以及储能电池能量的存储和释放,为了提高控制精度,采用电压电流双闭环进行控制。对式(2)进行小信号扰动处理并忽略二阶及以上高次扰动项可得
 (28)
(28)
对式(28)进行拉氏变换并消除 可得
可得
 (29)
(29)
由式(29)可得电池输出电流-电压的传递函数为
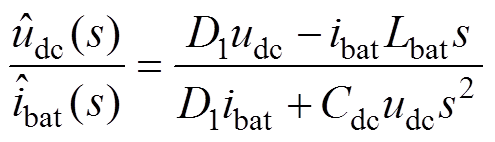 (30)
(30)
将式(30)改写为
 (31)
(31)
其中
式(31)与式(3)具有相同的结构,若令udc为输出量y,ibat为控制输入量u,uref分别为输出量参考值yref,则双向DC-DC变换器的电压外环控制也可设计为图8所示SM-ADRC策略。
电流内环采用PI控制,即
 (32)
(32)
式中,im为双向DC-DC变换器储能电池电流的实际测量值;kp为比例系数;ki为积分系数。
综上可得,改进后的光储一体化变流器的整体控制结构如图9所示。图中,SM-ADRC的具体形式与图8相同。
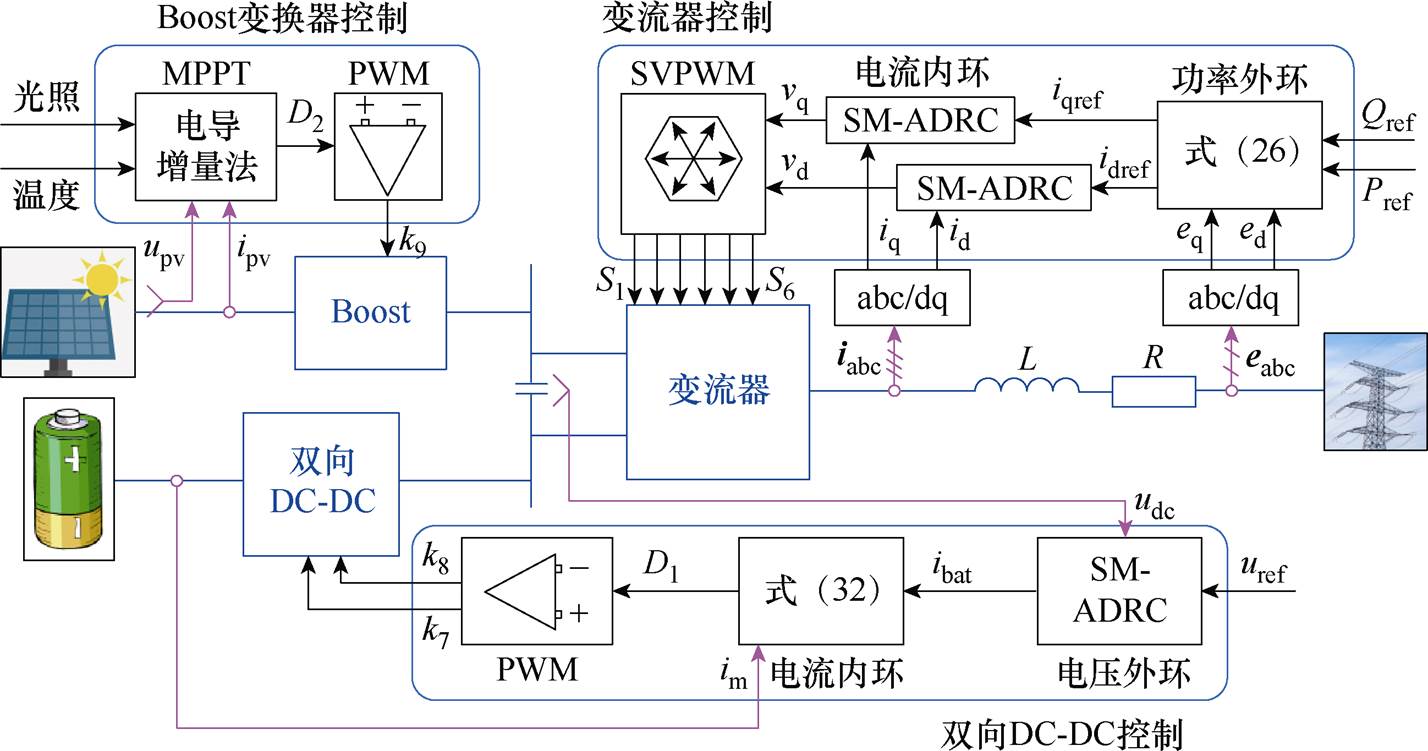
图9 光储一体化变流器整体控制结构
Fig.9 Integrated control block of PV-storage integrated converter
本节在Matlab/Simulink平台上搭建了图1所示的光储并网系统模型,验证理论分析的正确性和有效性,并在电路参数不变的情况下对比本文控制、PI控制以及传统SM-ADRC的动态性能。系统的电路拓扑参数见表1,控制电路参数见表2。
5.1.1 直流母线电压动态响应
为了对比当光照强度发生变化时直流母线电压的动态性能,保持光储一体化变流器输出功率为30 kW,模拟光照强度变化时光伏输出功率Ppv如图10所示。
表1 电路拓扑参数
Tab.1 Circuit topology parameter
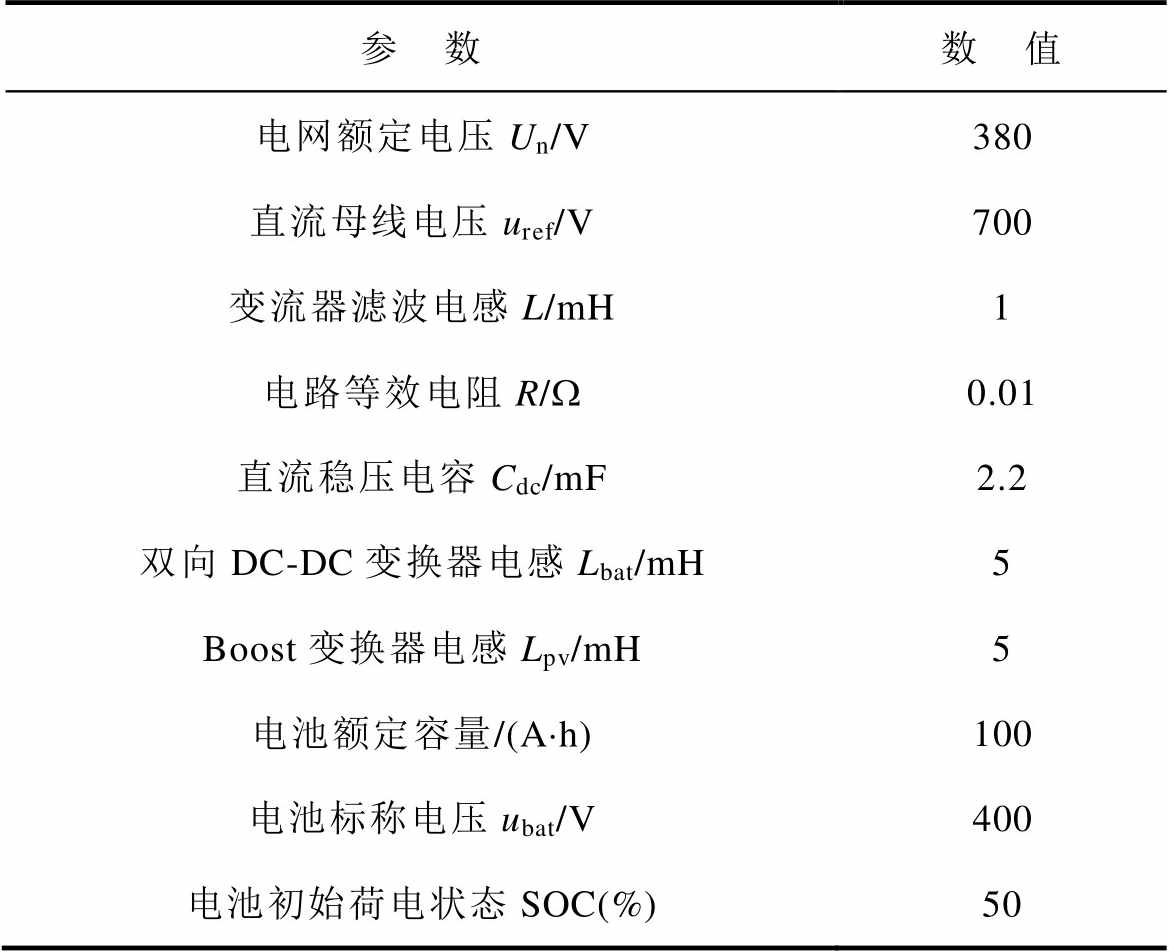
参 数数 值 电网额定电压Un/V380 直流母线电压uref/V700 变流器滤波电感L/mH1 电路等效电阻R/W0.01 直流稳压电容Cdc/mF2.2 双向DC-DC变换器电感Lbat/mH5 Boost变换器电感Lpv/mH5 电池额定容量/(A×h)100 电池标称电压ubat/V400 电池初始荷电状态SOC(%)50
表2 控制电路参数
Tab.2 Control circuit parameter
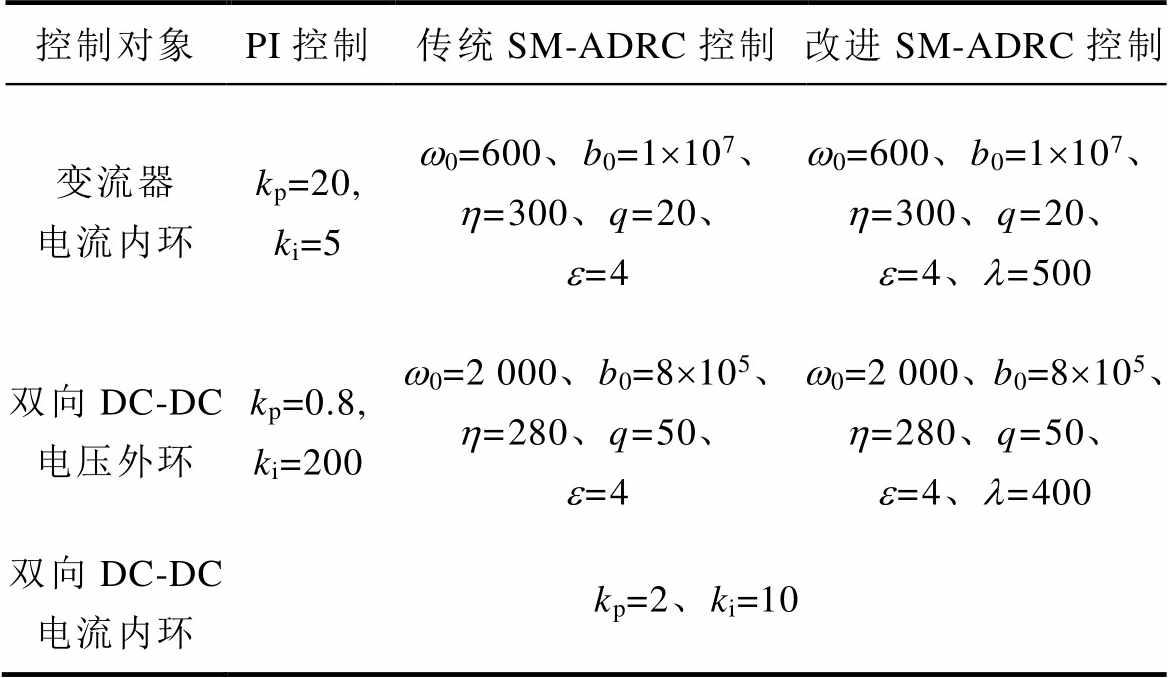
控制对象PI控制传统SM-ADRC控制改进SM-ADRC控制 变流器电流内环kp=20, ki=5w0=600、b0=1´107、h=300、q=20、e=4w0=600、b0=1´107、h=300、q=20、e=4、l=500 双向DC-DC电压外环kp=0.8, ki=200w0=2 000、b0=8´105、h=280、q=50、e=4w0=2 000、b0=8´105、h=280、q=50、e=4、l=400 双向DC-DC电流内环kp=2、ki=10
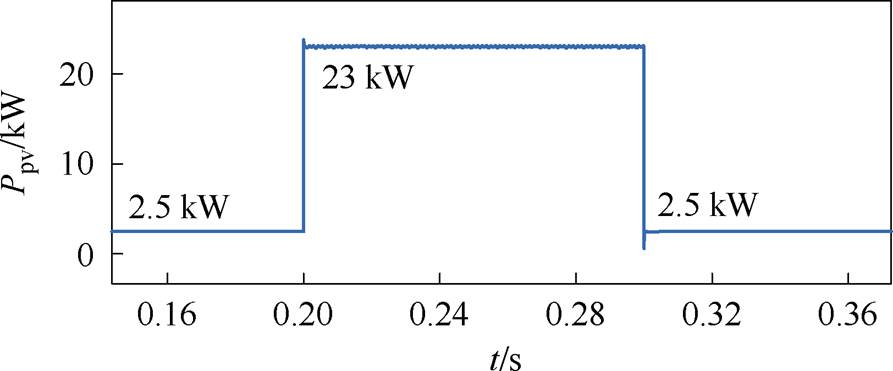
图10 光伏电源输出功率
Fig.10 Photovoltaic power supply output power
图10中,光伏输出功率在0.2 s时由2.5 kW突变为23 kW,模拟光照强度增强的过程,在0.3s时由23 kW突变为2.5 kW,模拟光照强度减弱的过程,与图10相对应的直流母线电压波动情况如图11所示。可以看出,无论是光照强度增强还是减弱,在本文所提控制策略下的母线电压超调量最小、调节时间最短,传统SM-ADRC策略其次,PI控制效果最差。
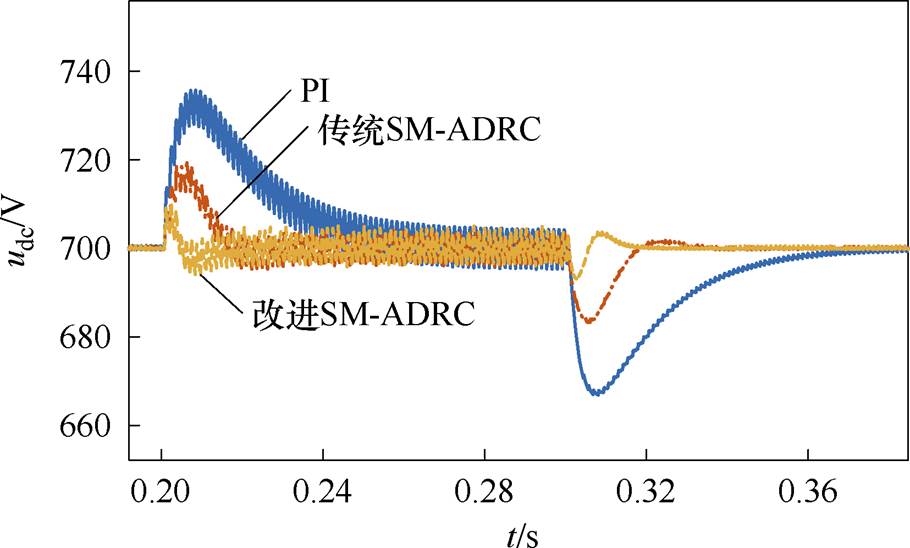
图11 光伏功率扰动时母线电压暂态过程
Fig.11 Bus voltage transient process during photovoltaic power disturbance
为了对比当负载突然加重或减轻时直流母线电压的动态性能,保持光伏输出功率为10 kW,模拟负载功率指令Pload变化如图12所示。
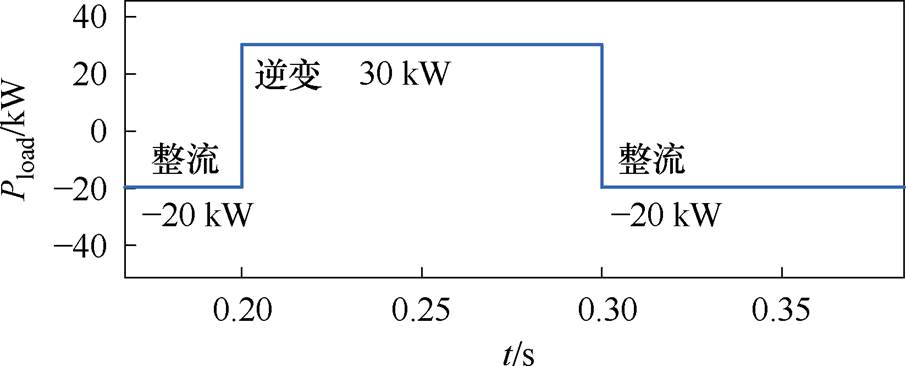
图12 负载功率消耗需求
Fig.12 Load power consumption requirements
图12中,在0.2 s时给光储一体化变流器30 kW的功率指令,光储一体化变流器由整流状态突变为逆变状态,在0.3 s时给光储一体化变流器-20 kW的功率指令,光储一体化变流器由逆变状态突变为整流状态,模拟负载的随机投切情况。在此工况下的直流母线电压波动情况如图13所示,对比图13中不同控制策略下的暂态直流母线电压超调量和调节时间不难发现,虽然传统SM-ADRC策略提升了控制效果,但提升能力有限,本文所提改进SM-ADRC控制策略进一步提升了直流母线电压暂态性能。
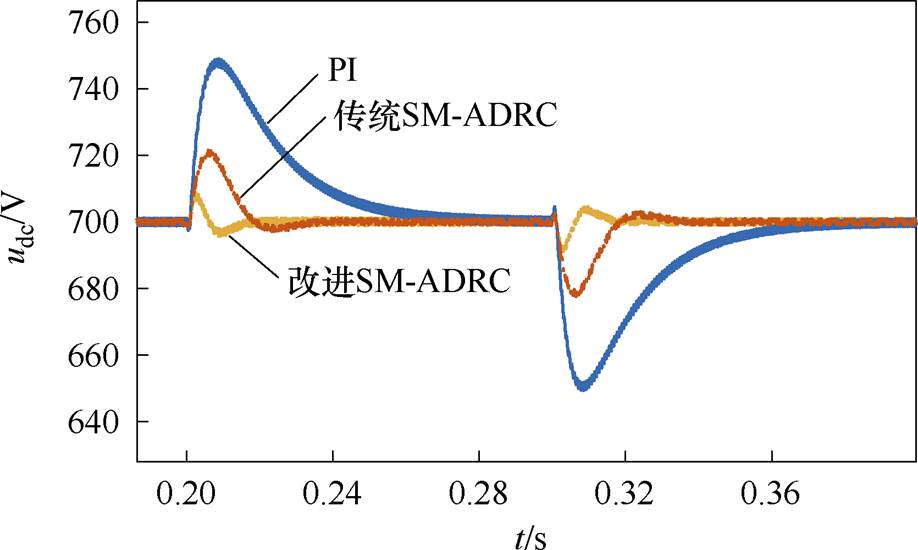
图13 负载投切时母线电压暂态过程
Fig.13 Bus voltage transient during load switching
在实际工况中可能会出现网侧电压跌落故障,针对这一问题,设计了光储并网系统的网侧发生电压跌落故障时网侧三相电压波形如图14所示。
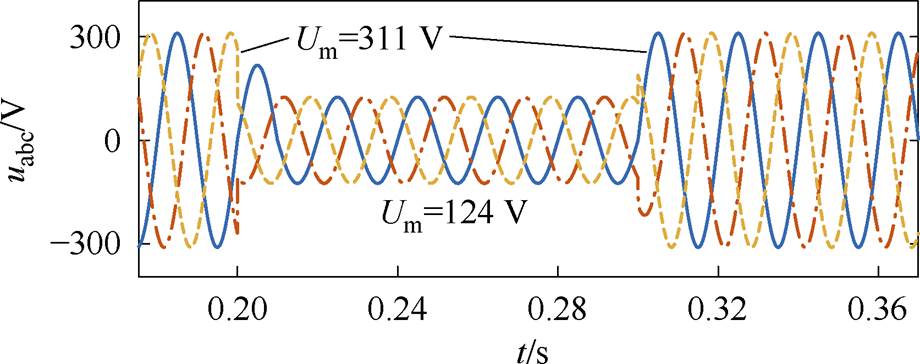
图14 电网侧电压发生跌落故障的电压波形
Fig.14 Voltage waveforms of power grid side voltage drop fault
图14中,电网侧电压在0.2 s时跌落60%,即相电压峰值从311 V突降为124 V,模拟实际运行过程中的网侧故障,在0.3 s时相电压峰值再恢复为311 V,模拟故障消除的过程。电压跌落扰动时,各种控制策略下的直流母线电压波动情况如图15所示,由图15可知,发生电网电压跌落故障时与前两种工况类似,本文所提改进SM-ADRC策略响应速度最快,即直流母线电压的波动量最小,调节时间最短,控制效果最好。
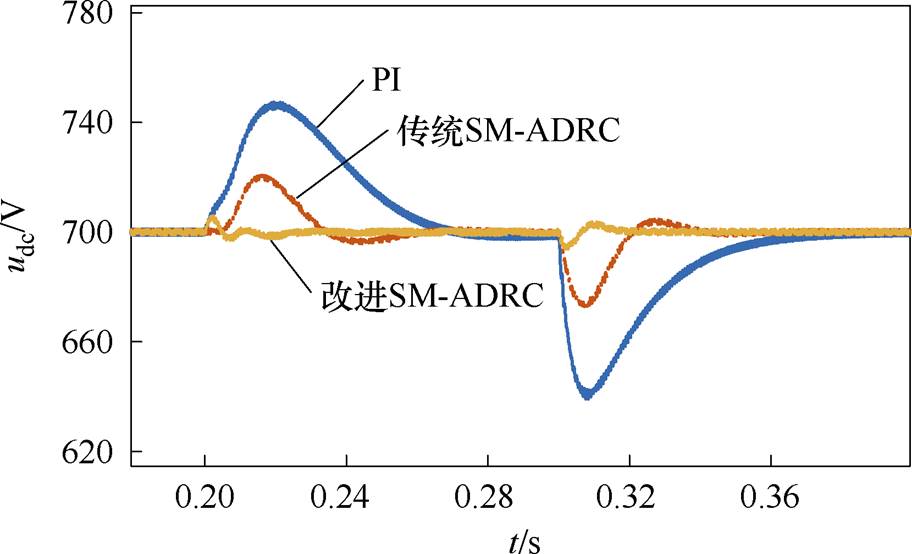
图15 网侧电压跌落故障时母线电压暂态过程
Fig.15 The transient process of bus voltage in case of grid side voltage drop fault
上述三种工况表明,本文所设计的改进SM- ADRC策略能很好地提高直流母线电压的动态性能,验证了本文控制的优越性。
5.1.2 输出功率动态响应
为了验证本文所提控制策略在改善功率响应速度方面的有效性,以图12所示功率指令为例,图16给出了三种控制策略下的输出功率响应速度对比。根据仿真结果,在三种控制策略下的功率超调量差别不大,但响应速度差别较大,其中改进SM- ADRC策略的响应速度最快,传统SM-ADRC策略其次,PI控制策略响应速度最慢。因此可得,改进SM-ADRC策略在保证较小功率超调量的基础上有效提高了功率响应速度,光储一体化变流器控制性能得以提升。
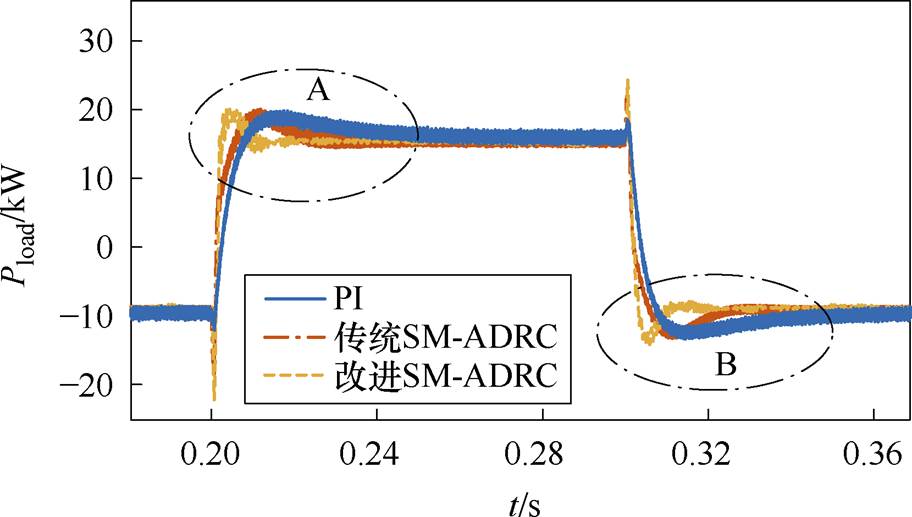
(a)输出功率响应
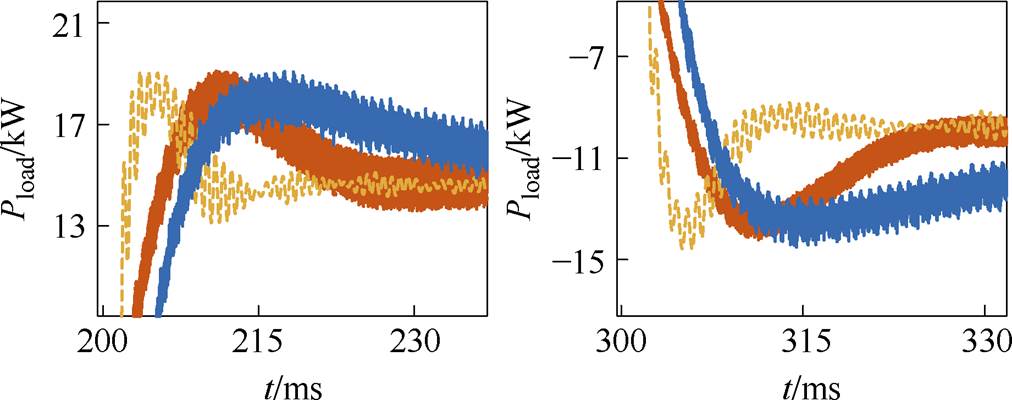
(b)范围A放大图 (c)范围B放大图
图16 功率指令变化时输出功率响应波形
Fig.16 Output power response waveforms when power instruction changes
为进一步验证理论分析和仿真结果的正确性,将图1所示系统运行在硬件在环(Hardware in the Loop, HIL)测试系统中,并采用DSP进行控制,实验平台原理示意图如图17所示,相关的实验参数与表1、表2相同。
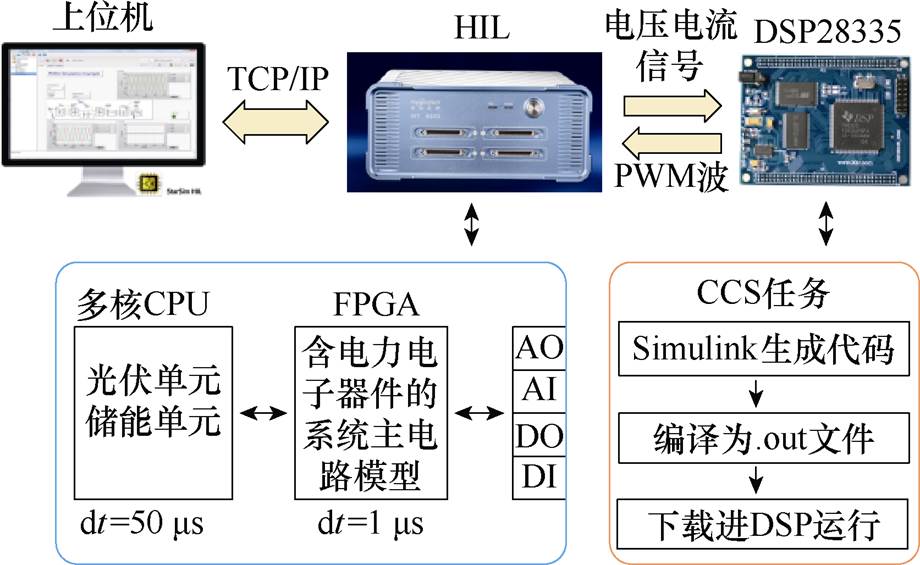
图17 实验平台原理示意图
Fig.17 Schematic diagram of experimental platform
5.2.1 直流母线电压暂态实验波形
当光伏电源输出功率以图10所示形式变化时,直流母线电压波动如图18和图19所示。光照强度变化时,光伏模块输出电压维持在600 V左右,图18中,光伏输出电流由4.21 A突变为38.3 A,即光伏输出功率由2.5 kW突增为23 kW,传统的SM- ADRC策略的直流母线电压超调量较大、暂态时间较长,而改进后的SM-ADRC策略直流母线电压超调量和暂态时间均有所减小;由图19可知,当光伏输出电流由38.3 A突变为4.21 A,即光伏输出功率由23 kW突降为2.5 kW时,相比于传统SM-ADRC策略,改进后的SM-ADRC策略直流母线电压超调量和暂态时间更小。
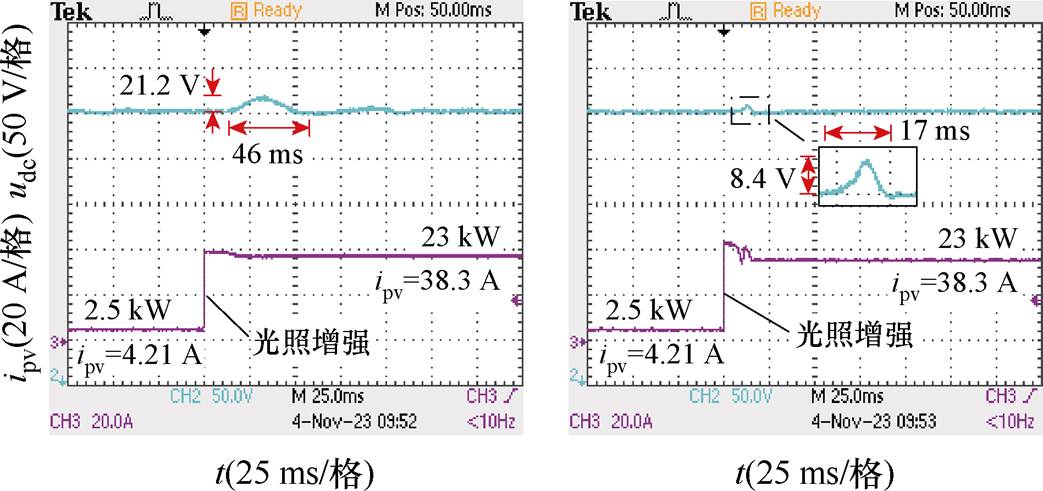
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图18 光伏功率突增时母线电压实验波形
Fig.18 Bus voltage experimental waveforms during photovoltaic power surge
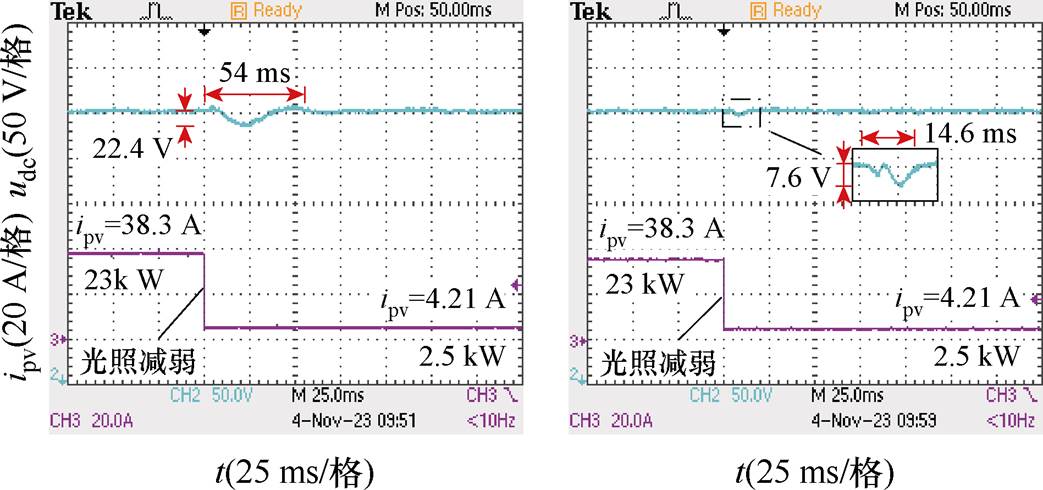
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图19 光伏功率突降时母线电压实验波形
Fig.19 Bus voltage experimental waveforms during PV power drop
当光伏输出功率指令以图12所示形式变化时,直流母线电压波动如图20和图21所示。由于光储一体化变流器与电网相连,因此相电压有效值固定为220 V,由图20可知,当光储一体化变流器a相输出电流最大值由逆变状态下42 A突变为整流状态下64 A,即输出功率由-20 kW突增为30 kW时,改进后的SM-ADRC策略直流母线电压暂态性能更好;同样地,由图21可知,当光储一体化变流器a相输出电流最大值由整流状态下64 A突变为逆变状态下42 A,即输出功率由30 kW突降为-20 kW时,改进后的SM-ADRC策略直流母线电压具有更好的暂态性能。
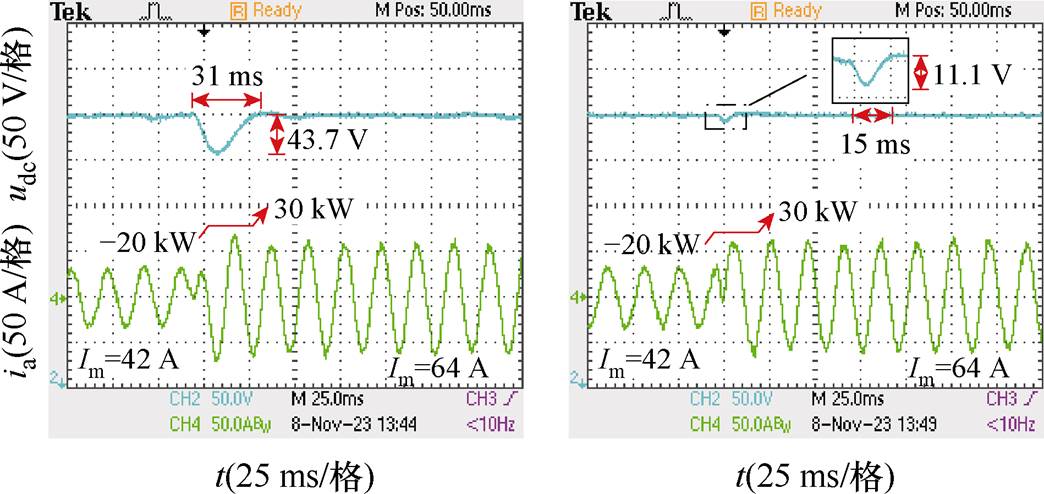
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图20 功率指令突增时母线电压实验波形
Fig.20 Bus voltage test waveforms during power command surge
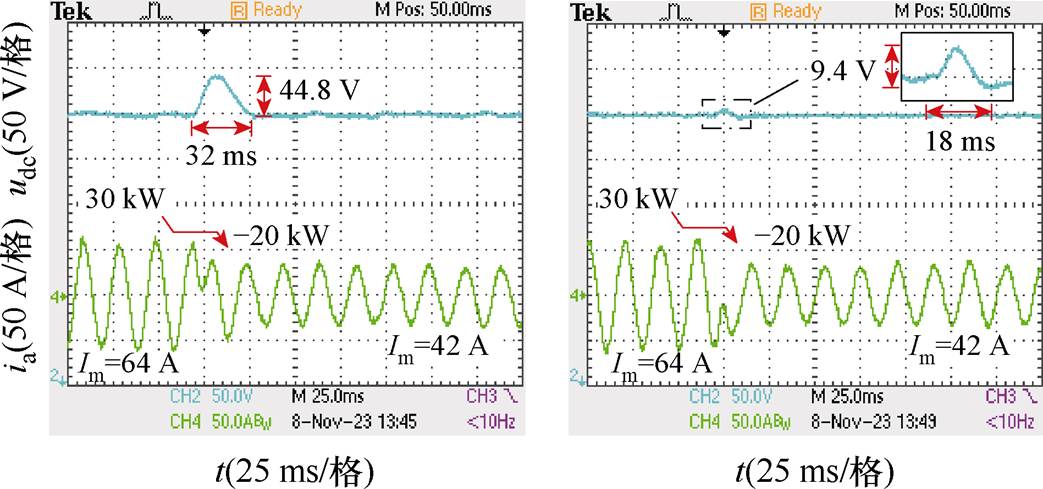
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图21 功率指令突降时母线电压实验波形
Fig.21 Bus voltage test waveforms during power command drop
当配电网电压发生如图14所示故障时,直流母线电压波动如图22和图23所示。由图22可知,当电网相电压跌落60%时,相比于传统SM-ADRC策略,改进后的SM-ADRC策略直流母线电压波动更小,暂态时间更快;由图23可知,当电网相电压峰值恢复至311 V时,改进后的SM-ADRC策略减小了直流母线电压的超调量和暂态时间。
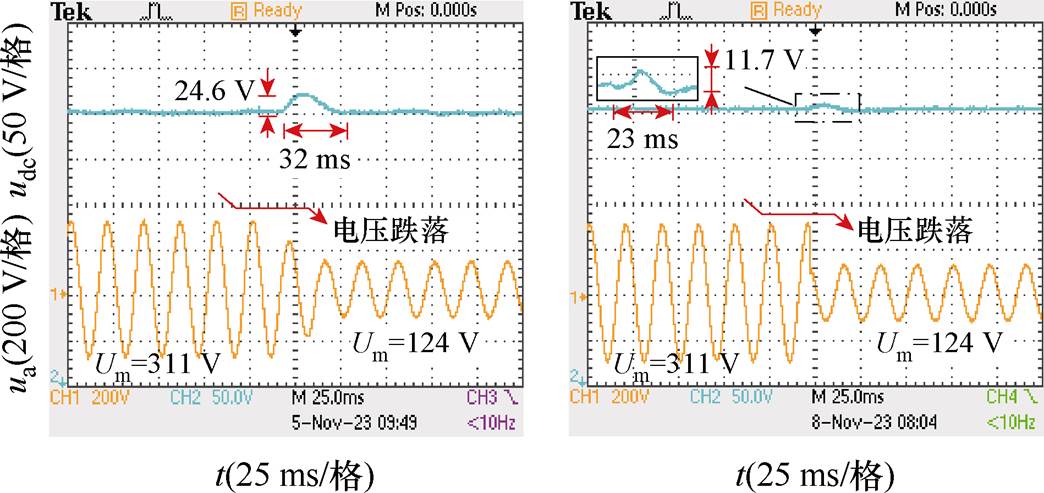
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图22 电网跌落故障时母线电压实验波形
Fig.22 Experimental waveforms of bus voltage in case of grid drop fault
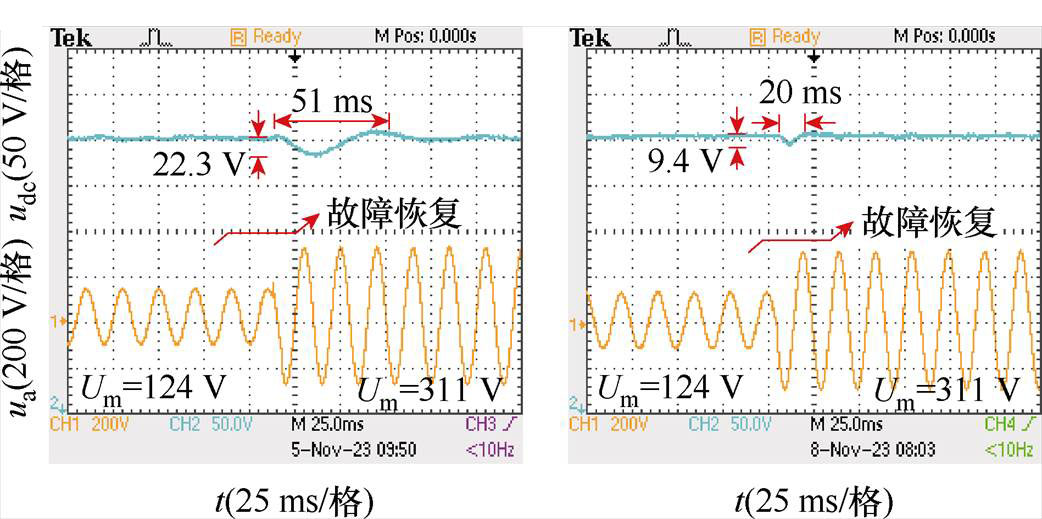
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图23 电网跌落故障恢复时母线电压实验波形
Fig.23 Experimental waveforms of bus voltage during grid drop fault recovery
通过上述三种工况实验可得,本文所提控制策略提升了光储一体化变流器的直流母线电压暂态性能。
5.2.2 输出功率暂态实验波形
光储一体化变流器与电网相连接,故输出功率变化时电压ed保持恒定,由式(26)可知,功率响应速度与电流id响应速度一致。为此,以图12所示功率指令变化为例,当光储一体化变流器输出功率由-20 kW突变为30 kW时,由图24可知,传统的SM-ADRC策略需要33 ms才能到达给定功率值,而改进后的SM-ADRC策略仅在7 ms后就到达给定值;当光储一体化变流器输出功率由30 kW突变为-20 kW时,由图25可知,传统的SM-ADRC策略需要31 ms才能到达给定功率值,而改进后的SM- ADRC策略仅需9 ms。
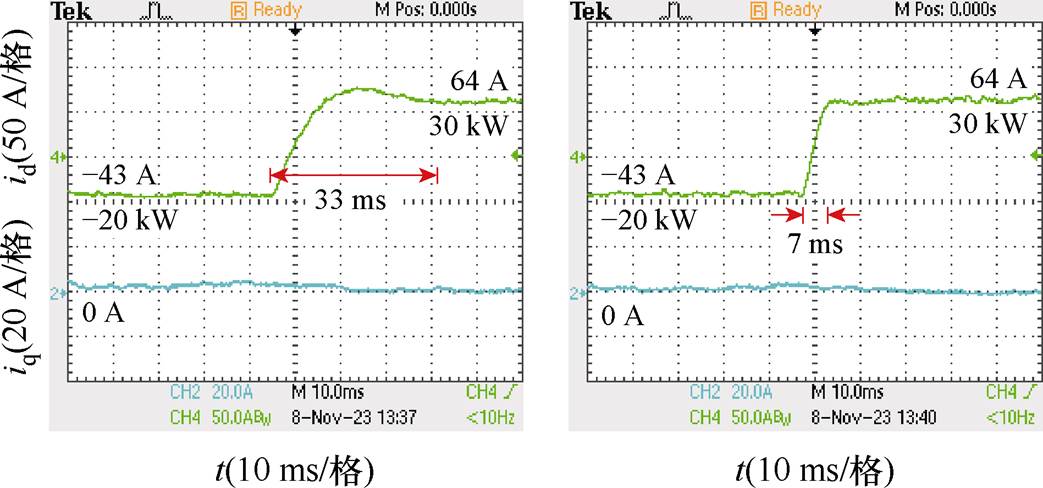
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图24 功率指令突增时变流器输出功率实验波形
Fig.24 Power command surge time PV-storage integrated converter output power experiment waveforms
由图24和图25可知,本文所提控制策略提高了光储一体化变流器的功率响应速度。
为了提高光伏并网系统的性能,本文在光储一体化变流器中提出了一种改进SM-ADRC策略,包括改进ESO提升观测精度、改进状态误差反馈律为反步互补滑模提升控制鲁棒性、改进指数趋近律减小滑模抖振。通过理论分析、仿真和实验验证,得出结论如下:
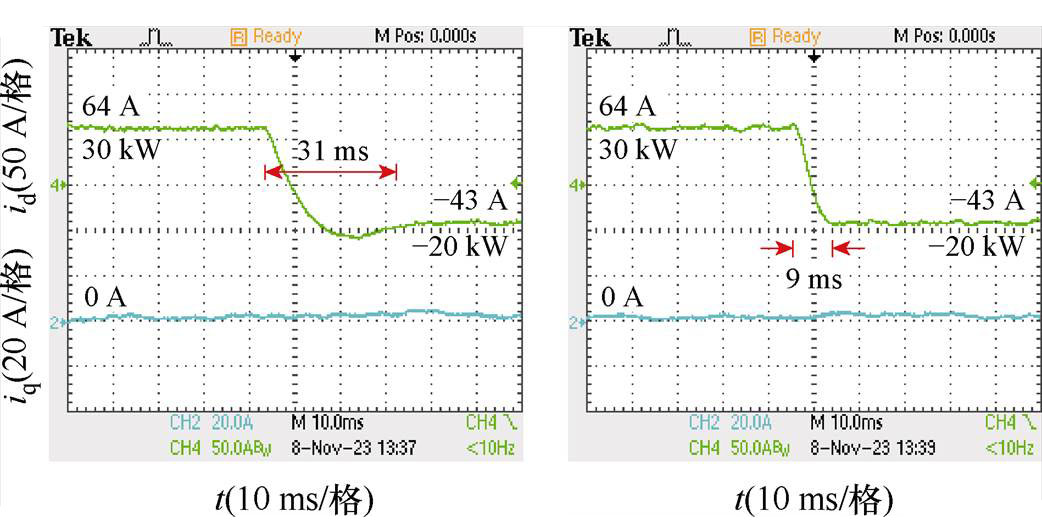
(a)传统SM-ADRC策略 (b)改进SM-ADRC策略
图25 功率指令突降时变流器输出功率实验波形
Fig.25 Power command drop time PV-storage integrated converter output power experiment waveforms
1)在多种工况下本文提出的改进SM-ADRC策略相较于PI控制、传统SM-ADRC策略具有更好的抑制直流母线电压波动能力,能有效延长光伏阵列和储能电池的使用寿命,提高光伏并网系统的经济性。
2)改进SM-ADRC策略的功率响应速度更快,提高了光伏并网系统的暂态性能,可以减小功率滞留问题,增加电力系统的可靠性。
附 录
定义e=aref-a1,当采用互补滑模控制时,文中式(21)所示系统的控制律可表示为
 (A1)
(A1)
当采用BCSMC时,控制律可表示为
 (A2)
(A2)
当采用改进指数趋近律的BCSMC时,控制律可表示为
 (A3)
(A3)
在进行文中图6和图7仿真验证时,式(A1)~式(A3)的参数选择见附表1。
附表1 滑模控制参数
App.Tab.1 Sliding mode control parameters
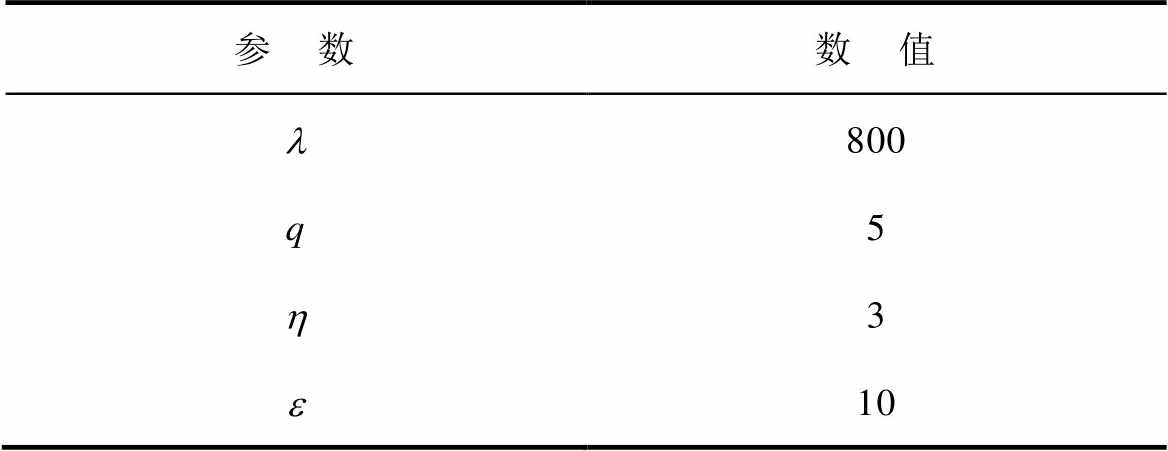
参 数数 值 l800 q5 h3 e10
参考文献
[1] Teng Yuting, Deng Wei, Pei Wei, et al. Review on grid-forming converter control methods in high- proportion renewable energy power systems[J]. Global Energy Interconnection, 2022, 5(3): 328- 342.
[2] 潘尧, 孙孝峰, 蔡瑶, 等. 一种拓展模块化多电平变换器的光伏系统稳定运行范围的谐波补偿调制策略[J]. 电工技术学报, 2024, 39(4): 1132-1146.
Pan Yao, Sun Xiaofeng, Cai Yao, et al. A harmonic compensation modulation strategy for extending steady operation range of modular multilevel converter-based photovoltaic system[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 1132- 1146.
[3] 孔令国, 王嘉祺, 韩子娇, 等. 基于权重调节模型预测控制的风-光-储-氢耦合系统在线功率调控[J]. 电工技术学报, 2023, 38(15): 4192-4207.
Kong Lingguo, Wang Jiaqi, Han Zijiao, et al. On-line power regulation of wind-photovoltaic-storage- hydrogen coupling system based on weight adjustment model predictive control[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4192-4207.
[4] Gao Ning, Lin Xin, Lu Song, et al. Active disturbance rejection control based on extended state observer for three-phase battery energy storage power conversion system with LCL filter[J]. Journal of Electrical Engineering & Technology, 2022, 17(2): 1169-1182.
[5] Zholtayev D, Rubagotti M, Do T D. Adaptive super- twisting sliding mode control for maximum power point tracking of PMSG-based wind energy conversion systems[J]. Renewable Energy, 2022, 183: 877-889.
[6] Ma Ruizi, Guo Xu, Zhang Yijie, et al. PMSG offshore wind power system control using SMC and ADRC with fast SVPWM in complicated environment[J]. Electrical Engineering, 2023, 105(5): 2751-2767.
[7] Li Jianguo, Lü Xiuping, Zhao Biao, et al. Research on passivity based control strategy of power conversion system used in the energy storage system[J]. IET Power Electronics, 2019, 12(3): 392-399.
[8] 尹政, 胡存刚, 芮涛, 等. LC滤波型电压源逆变器无模型预测电压控制策略[J]. 电工技术学报, 2023, 38(14): 3723-3732.
Yin Zheng, Hu Cungang, Rui Tao, et al. Model-free predictive voltage control strategy for LC-filtered voltage source inverter[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3723-3732.
[9] 易衡, 张雄, 黄宇. 基于VGSM-LADRC的储能-火电协同调频控制策略[J]. 电力系统自动化, 2023, 47(21): 147-155.
Yi Heng, Zhang Xiong, Huang Yu. Coordinated frequency regulation control strategy for energy storage and thermal power based on variable gain slide model and linear active disturbance rejection controller[J]. Automation of Electric Power Systems, 2023, 47(21): 147-155.
[10] Wang Guangwei, Wang Bo, Zhao Jin, et al. Robust tracking for nanopositioning stages using sliding mode control with active disturbance rejection: design and implementation[J]. Journal of Vibration and Control, 2023, 29(15/16): 3809-3822.
[11] Cheng Chunhua, Li Lin, Han Qiang. Adaptive sliding mode ADRC for attitude tracking with actuator saturation and uncertainties[J]. International Journal of Robotics and Automation, 2021, 36(5): 337-344.
[12] 王雨祺, 赵兴勇, 赖建中, 等. 基于自抗扰控制的光伏微网储能控制策略[J/OL]. 电气工程学报, 2023: 1-9. http://kns.cnki.net/kcms/detail/10.1289.TM. 20230729.1659.002.html.
Wang Yuqi, Zhao Xingyong, Lai Jianzhong, et al. Energy storage control strategy for photovoltaic microgrid based on active disturbance rejection control[J/OL]. Journal of Electrical Engineering, 2023: 1-9. http://kns.cnki. net/kcms/detail/10.1289. TM.20230729.1659.002.html.
[13] 朱良红, 张国强, 李宇欣, 等. 基于级联扩张观测器的永磁电机无传感器自抗扰控制策略[J]. 电工技术学报, 2022, 37(18): 4614-4624.
Zhu Lianghong, Zhang Guoqiang, Li Yuxin, et al. Active disturbance rejection control for position sensorless permanent magnet synchronous motor drives based on cascade extended state observer[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4614-4624.
[14] Wang Haoyu, Zuo Zhiqiang, Wang Yijing, et al. Composite nonlinear extended state observer and its application to unmanned ground vehicles[J]. Control Engineering Practice, 2021, 109: 104731.
[15] 张泽华, 宋桂英, 张晓璐, 等. 考虑恒功率负载的直流微电网稳定性与鲁棒性控制策略[J]. 电工技术学报, 2023, 38(16): 4391-4405.
Zhang Zehua, Song Guiying, Zhang Xiaolu, et al. Stability and robustness control strategy of DC microgrid considering constant power load[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4391-4405.
[16] 何建华, 宋润生, 蔡明洁, 等. 基于命令滤波反步法的双电机离散同步控制[J]. 电机与控制应用, 2023, 50(9): 35-41, 48.
He Jianhua, Song Runsheng, Cai Mingjie, et al. synchronous discrete control of dual-motor system based on command filtered backstepping method[J]. Electric Machines & Control Application, 2023, 50(9): 35-41, 48.
[17] 黄金杰, 梁恒愉, 宫煜晴, 等. 二自由度云台非线性反步控制器设计[J]. 电机与控制学报, 2023, 27(4): 148-154.
Huang Jinjie, Liang Hengyu, Gong Yuqing, et al. Nonlinear backstepping controller design for two- degree-of-freedom pan-tilt[J]. Electric Machines and Control, 2023, 27(4): 148-154.
[18] Zhu Erlin, Du Youwu, Song Wei, et al. Altitude control of powered parafoil using fractional sliding- mode backstepping control combined with extended state observer[J]. Applied Sciences, 2022, 12(23): 12069.
[19] Zhang Shuzhong, Li Su, Dai Fuquan. Integral sliding mode backstepping control of an asymmetric electro- hydrostatic actuator based on extended state observer[C/OL]//The 1st International Electronic Conference on Actuator Technology: Materials, Devices and Applications, 2020: 64(1), 13; https:// doi.org/10.3390/IeCAT2020-08495.
[20] 时维国, 宁宁, 宋存利. 基于反步滑模的移动机器人编队控制算法[J]. 中国惯性技术学报, 2023, 31(3): 282-291.
Shi Weiguo, Ning Ning, Song Cunli. Formation control algorithm of mobile robots based on backstepping sliding mode[J]. Journal of Chinese Inertial Technology, 2023, 31(3): 282-291.
[21] Talha M, Raihan S R S, Rahim N A, et al. Multi- functional PV inverter with low voltage ride-through and constant power output[J]. IEEE Access, 2022, 10: 29567-29588.
[22] 廖禄伟, 杨忠, 王灿, 等. 悬挂伸缩刀具的树障清理空中机器人飞行控制方法[J]. 控制理论与应用, 2023, 40(2): 343-352.
Liao Luwei, Yang Zhong, Wang Can, et al. Flight control method of aerial robot for tree obstacle clearing with hanging telescopic cutter[J]. Control Theory & Applications, 2023, 40(2): 343-352.
Abstract In order to reduce the use of fossil fuels and carbon dioxide emissions, renewable energy sources such as photovoltaic (PV) power generation systems have developed rapidly. However, the output power of photovoltaic arrays has great volatility. Direct integration into the grid may cause fluctuations in grid voltage and frequency, which have a negative impact on the stable operation of the grid. The establishment of a PV-storage integrated converter to connect the photovoltaic module and the power grid is an effective way. However, the PV-storage integrated converter is a multi-input system with nonlinear and strong coupling characteristics. The traditional control cannot achieve the ideal control effect, which decreases the energy utilization rate. Therefore, an improved sliding mode active disturbance rejection control (SM-ADRC) strategy is proposed to reduce the transient DC bus voltage fluctuation and accelerate the power response speed by improving the extended state observer (ESO) and the state error feedback law.
The specific design method of SM-ADRC strategy for second-order systems is as follows. Firstly, aiming at the problem of insufficient accuracy of ESO for state variables and disturbance observation, a new error is introduced as the adjustment basis of ESO to improve tracking ability. The improved ESO has a faster estimation speed and higher estimation accuracy of x2 and x3 than the traditional ESO simulation under unit step and unit slope, which effectively improves the performance of active disturbance rejection control. Secondly, aiming at the problem of insufficient robustness of the traditional state error feedback law, the state error feedback law is changed to the back stepping complementary sliding mode control (BCSMC) based on the improved exponential reaching law. It is found that the introduction of the back stepping method effectively improves the convergence accuracy of the system, and the introduction of the improved exponential reaching law effectively reduces the sliding mode chattering phenomenon. Finally, the error range of the improved ESO is obtained, and the stability of BCSMC and improved ESO based on the improved exponential reaching law is proved according to the eigen value criterion and the Lyapunov method.
Through the state space averaging method, the mathematical models of the converter part and the bidirectional DC-DC converter part in the PV-storage integrated converter are established. The current inner loop control of the converter part and the voltage outer loop control of the bidirectional DC-DC converter part are changed to the improved SM-ADRC. The DC bus fluctuation and power response speed under three working conditions of photovoltaic power mutation, power command mutation and grid drop fault are compared by simulation and experiment. The superiority of the improved SM-ADRC strategy compared with the traditional SM-ADRC strategy and PI control strategy is verified.
keywords:PV-storage integrated converter, active disturbance rejection control, backstepping design, complementary sliding mode control, improved exponential reaching law
DOI: 10.19595/j.cnki.1000-6753.tces.231805
中图分类号:TM46
陕西省自然科学研究项目(2023-JC-YB-442)和陕西理工大学研究生创新基金项目(SLGYCX2404)资助。
收稿日期 2023-10-30
改稿日期 2024-03-22
周 杰 男,2000年生,硕士研究生,研究方向为新能源发电及电力电子变换器控制技术。E-mail: 2114773968@qq.com
皇金锋 男,1978年生,教授,研究生导师,研究方向为新能源发电及电力电子变换器控制技术。E-mail: jfhuang2000@163.com(通信作者)
(编辑 郭丽军)