摘要 永磁同步电机(PMSM)的低速无位置传感器控制主要依赖于电机的凸极性,表贴式永磁同步电机(SPMSM)的电感凸极率低,位置信号的信噪比(SNR)较低,使传统高频注入法获得高精度初始位置面临挑战。深度机器学习能够挖掘比较微弱的信号特征,即使在SNR较低的情况下,也能够获取准确的位置信息,但是传统单流结构机器学习的估算性能比较依赖于训练集的数据概率分布,存在数据泛化能力差的问题。针对这一问题,该文提出一种数据分布自适应的领域对抗神经网络(DANN),在传统卷积神经网络(CNN)的基础上,增加领域判别器和梯度反转层(GRL)将单流结构变为双流结构,使两个网络能够通过抗迁移学习,以学习到领域的不变特征,实现数据分布的自适应,从而解决因数据概率分布不一致带来的位置估算性能下降的问题。实验结果证明,该方法能够有效实现对低凸极率电机的初始位置估算,对新数据能够实现比单流CNN结构更好的位置估算效果,有效解决单流结构CNN位置估算模型数据泛化能力差的问题。
关键词:图像识别 迁移学习 网络对抗 数据自适应 数据泛化
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于其体积小、效率高、功率密度高等优点,被广泛应用于电动汽车、机器人系统、航空航天等工业领域[1-4]。PMSM的高性能控制需要准确的位置信息[5-7]。一般情况下,位置信息通过安装的位置传感器直接测量获得,然而,安装位置传感器将导致电机空间尺寸的增加,再者,连接传感器需要额外的布线,这也将导致系统的可靠性降低[4, 8-9],甚至在某些特殊应用场合也因空间、环境因素的制约没法使用位置传感器。因此,PMSM无位置传感器的控制成为学术界、工业界研究的一个热点。
精确的初始位置是无传感器位置控制的前提[7]。常用的初始位置检测控制方案是通过d轴对齐方式,将转子拉到预设零位。然而,在某些特殊场合,例如金属拉削、电动汽车和电梯等领域,起动前不允许转子有任何的转动。为此,国内外学者对无传感器位置控制做了大量的研究,文献[10-15]利用PMSM的反电动势来估计转子位置,由于反电动势的幅值与转速成正比,所以基于反电动势的位置估算方法只适应用于中高速范围。文献[2, 16-21]中通过高频注入(High Frequency Injection, HFI)的方法进行位置估计,根据高频信号注入坐标系的不同可以分为高频旋转注入和高频脉振注入,这两种方法都是基于电机凸极性从高频响应中获取转子位置信息。其中,高频脉振注入是将高频激励信号注入到估计d轴,自激励出显著的饱和凸极性[1],因此该方法可以用在凸极率较低的电机中;高频旋转注入不能通过自激励获得额外的凸极性,对电机的凸极率要求较高,用于凸极性显著的电机中。表贴式永磁同步电机(Surface Permanent Magnet Syn- chronous Motor, SPMSM)由于凸极率低,可通过脉振注入的方式来进行位置估计,但是高频脉振注入需要准确的初始位置信息才能获得准确的位置信息,不能用来进行初始位置估计[22]。高频旋转注入因为高频电压直接注入在静止坐标轴下,无需初始位置信息就可以用来进行无位置控制,但是,SPMSM凸极率低,使激励后的响应的SNR较低,使获取位置信息比较困难,再者,HFI的位置估算模型还受到转子绕组、磁场交叉饱和效应、死区、逆变器非线性等非理想因素的影响[23-25],给高精度的位置估计带来诸多挑战。针对该问题,文献[21, 26]利用图像跟踪的方法进行位置估计,文献[21]根据测试数据图像与模板样本数据的相关性的最大值来进行位置判定,该方法使用一个相关值作为特征数据进行位置估计,特征数据单一,容易受到干扰,并且模板样本数据也不包含极性信息,极性还需要进行额外的判断。文献[26]根据在高频激励下获得的电流矢量图像与转子位置的映射关系,通过支持矢量机(Support Vector Machine, SVM)对高频电流图像进行识别来进行位置估计,虽然该方法取得了较好的实验结果,但是其估算精度依赖训练集的数据概率分布,对与训练集的数据概率分布不一致的数据进行预测时存在估算性能下降问题。
在实际测试过程中,电机瞬时负载变化给全工况的样本数据采集以及进行准确的位置标签标注带来困难,也给基于稳态工况下测试的数据集训练出的模型对未知新数据做出准确的位置估计带来挑战,为了解决该问题,本文提出了一种基于领域对抗神经网络(Domain-Adversarial Neural Networks, DANN)来进行位置识别的方法,该方法通过隐式空间表达策略,在卷积神经网络(Convolutional Neural Network, CNN)进行图像分类的基础上引入梯度反转层(Gradient Reversal Layer, GRL)和域判别器,将单流结构变为双流结构,通过抗迁移学习到领域间的不变特征,从而实现待测新数据向训练集数据概率分布的迁移学习。该方法不仅能够有效实现对低凸极率电机的初始位置估算,而且还可以有效解决单流结构神经网络模型数据泛化能力差的问题,进而显著减小在未知新数据下的位置估算偏差。
虽然机器学习能够挖掘比较微弱的信号特征,实现准确的位置估算,但是传统单流结构的CNN模型比较依赖训练集的数据概率分布,训练集的数据概率分布与待预测数据的数据概率分布不一致时,存在位置估算性能下降的问题。DANN网络通过隐式对抗迁移学习,达到数据概率分布自适应,从而实现目标域数据向源域数据的迁移学习,使自适应后的数据概率分布趋于一致,提高基于DANN位置估算模型的数据泛化能力。
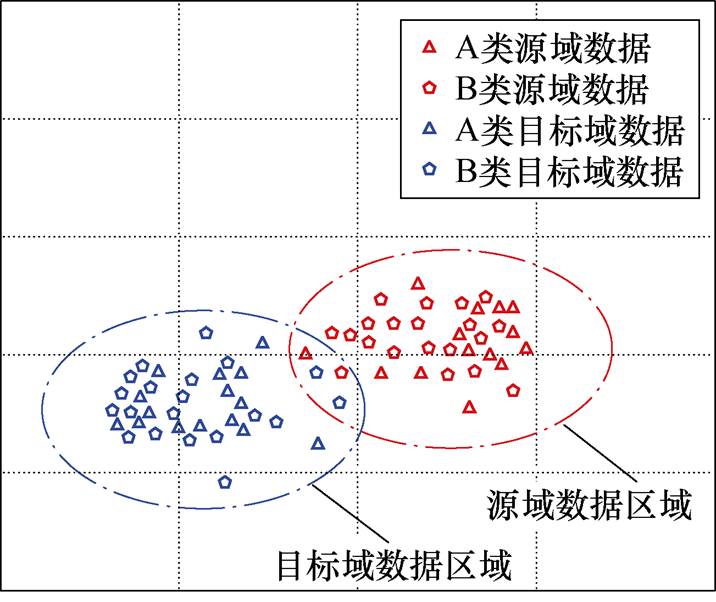
图1所示为DANN进行网络迁移的示意图,形象地展示DANN方法的实现原理。图1a中展示了源域和目标域数据的数据分布,两者存在明显的分布差异,图1b展示了源域和目标域经过对抗迁移学习前、后的数据概率分布,经过对抗迁移学习后,实现原概率分布不同的两部分数据,概率分布趋于一致,从而解决了待测数据与训练集数据概率分布不一致的问题。
(a)数据分布
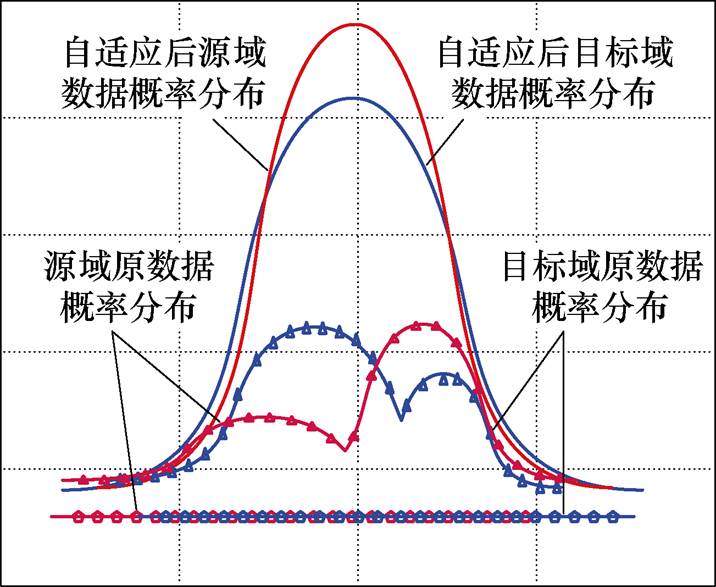
(b)数据概率分布
图1 DANN迁移说明
Fig.1 The description of migration process of DANN
为了获得初始位置信息,在ab 轴坐标系下给电机三相绕组中注入平衡的三相高频激励电压,从高频响应电流中获取位置信息。
PMSM定子电压方程可表示为
 (1)
(1)
式中,ud、uq、id、iq分别为d、q轴的定子电压和电流;Ld和Lq分别为d、q轴自感;Ldq和Lqd分别为d、q轴互感,一般情况下,Ldq=Lqd;Rs为定子电阻; 为永磁体磁链;
为永磁体磁链; 为电角速度;p为求导运算。
为电角速度;p为求导运算。
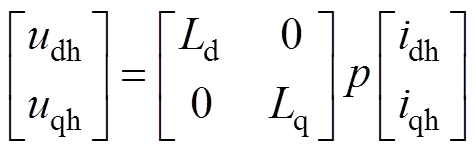
一般高频估算模型,忽略电阻、交叉饱和效应、互感与反电动势的影响,定子高频电压方程可以简化为
 (2)
(2)
式中,udh、uqh、idh、iqh分别为d、q轴的高频电压激励和高频电流响应。
ab 轴坐标下注入的高频旋转电压矢量为
 (3)
(3)
式中,Vc和 分别为高频注入的电压幅值和频率。
分别为高频注入的电压幅值和频率。
高频激励下的高频电流响应经过在ab 轴坐标下用正负序方式表示,得到方程[24]为
 (4)
(4)
 (5)
(5)
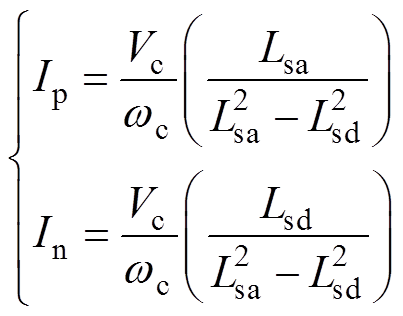
其中
 (6)
(6)
式中, 、
、 分为在ab轴、dq轴系下高频电流响应的向量;Ip、In分别为正、负序电流的幅值大小;Lsa为平均电感;Lsd为半差电感。
分为在ab轴、dq轴系下高频电流响应的向量;Ip、In分别为正、负序电流的幅值大小;Lsa为平均电感;Lsd为半差电感。
根据文献[27-28],考虑磁饱和和多凸极性的影响,高频电流响应方程可以表示为
 (7)
(7)
式中,Ic_p1为正序1次谐波电流幅值;Ic_n1为负序1次谐波电流幅值;Ic_p2为正序2次谐波电流幅值;Ic_n2为负序2次谐波电流幅值;Ic_nh为负序h次谐波电流幅值;f2p、f2n、fh分别为2次正、负序和h次谐波电流的相位。如式(7)所示,在ab 轴坐标系下的高频电流含有转子位置信息:高频电流的负序分量含有2倍电角度位置信息2qe;2次谐波的负序分量和1次谐波正序分量分别包括1倍和3倍电角度位置信息qe和3qe,2次谐波的负序分量和1次谐波的正序分量包含有奇数倍电角度,它们可以被用来进行极性判断。
矢量数据可以被看作是一种图形化的描述[29]。图形化数据不仅可以描述数据中的幅值和相位大小信息,而且还可以表征数据之间的相对关系,这更利于挖掘数据中蕴含的特征信息。
为了能够提取式(7)高频电流矢量中含有的位置和极性特征,将高频响应电流经过带通滤波器(Band-Pass Filter, BPF)获得和同步轴系滤波(Synchronous Frame Filter, SSF)获得高频电流的1次负序部分与2次正序部分重构成新的电流矢量,高频电流矢量的重构过程如图2所示。

图2 重构矢量的过程
Fig.2 The process of reconstructing vectors
重构的电流矢量记为ipn,其构成如图3a所示,重构的高频电流矢量,按照矢量实部沿水平轴,虚部沿纵轴的方式展开,重构矢量的二维图像轨迹示意图如图3b所示。
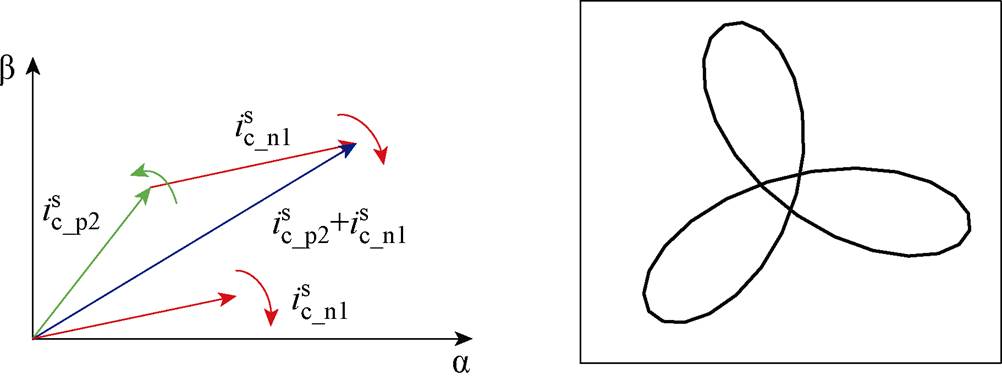
(a)复合矢量构成 (b)重构矢量的轨迹
图3 重构电流矢量示意图
Fig.3 Reconstructed current vector diagram
DANN的基本思想:通过引入对抗学习机制,在不变领域特征下使源域与目标域的数据分布在特定映射空间,分布趋于一致,实现目标域和源域的混淆,其损失函数可以表达成域分类的损失函数值最大;通过对抗学习后,在特定映射空间目标域数据与源域数据具有相同或相似的数据概率分布,通过基于源域数据的训练得到的分类模型对目标域数据进行分类预测。为了实现源域数据的准确分类,需要以源域数据的实际标签与模型预测的分类标签的交叉损失熵最小为目标进行参数优化。因为该模型有两个损失函数,需以交替更新的方式进行寻优,从而使源域数据准确分类,又能实现数据间的自适应,达到解决单流结构估算模型泛化能力差的问题。
DANN具有对抗生成网络的特点,以源域数据的准确分类和域分类的混淆判断为目标,通过不断地对抗训练获取域不变特征,DANN主要由特征提取器、分类器、域判别器三部分组成,其结构示意图如图4所示。

图4 DANN结构示意图
Fig.4 The structure diagram of DANN
(1)特征提取器Gf (·; qf)。用来接收源域和目标域数据,负责对接收数据进行特征提取,常用CNN进行特征提取,如图4中绿色部分所示。
(2)分类器Gy(·; qy)。用于将接收提取到的数据特征进行分类,特征映射到样本标签空间,建立数据特征与位置标签的关联,如图4中浅蓝色部分所示。
(3)领域判别器Gd(·; qd)。用于判定输入特征来自源域还是目标域,主要有一个二分类的全连接层和softmax层组成,如图4中粉红色部分所示。
(4)损失函数。DANN损失函数由两部分构成,一部分是表征源域数据分类的类标签分类损失,另一部分是表征域分类器的分类损失。域分类器与类标签分类器的输入都来自于特征提取器,其中域分类器的目标是通过混淆域间的分类,实现源域和目标域数据之间的自适应,因此需要使域分类器损失函数值最大化;类标签分类器的目标是最小化分类损失,实现图像的精准分类。模型为了能够实现特征提取器参数的共享又实现类标签分类器和域分类器中参数的相互独立,DANN结构中引入GRL层在迭代学习中进行参数的交替更新对抗,其正向传播函数 和反向传播函数
和反向传播函数 分别为
分别为
 (8)
(8)
式中, 为源域和目标域之间特征映射的混淆程度,的大小影响域自适应的效果。
为源域和目标域之间特征映射的混淆程度,的大小影响域自适应的效果。
GRL位于特征提取器与域分类器之间,在反向传播过程路径域分类器的域分类损失的梯度参数取反,正向传播路径参数取正,从而达到网络对抗学习的目的,因此,损失函数可以表示为
 (9)
(9)
式中, 为图像输入;
为图像输入; 为图像经过特征提取器的特征向量;
为图像经过特征提取器的特征向量; 为经过类分离器获得的分类标签;
为经过类分离器获得的分类标签; 为图像实际分类标签;dk为域标签;
为图像实际分类标签;dk为域标签; 为特征提取网络;
为特征提取网络; 为类分类器网络,
为类分类器网络, 为域分类器网络;
为域分类器网络; 为类标签分类器损失;
为类标签分类器损失; 为域分类器损失。
为域分类器损失。
为了实现需求精度的位置估算,首先需要根据位置估算精度设置分类数量,并以此来确定模型的训练集和测试集。
特征提取器一般由卷积神经网络负责深层特征信息的提取,其主要由输入层、卷积层、归一化层、激活层和全连接层构成。
输入层是重构矢量的高频电流图像经过预处理后得到的一张28×28灰度图像矩阵。
卷积层的作用是提取图像中的特征信息,通过卷积核对输入层数据按照一定规则进行卷积运算,并把这个运算结果作为高维特征的一个元素,实现将原始数据的局部低维特征向高维的特征映射,本文特征提取层的卷积层包含20个大小为5×5卷积核,与28×28输入图像进行卷积运算,生成20个大小为24×24的特征映射。
批归一化层主要是为了减小一个批次内数据之间的分布差异,将输入数据进行归一化,可以降低网络初始化的敏感性,也方便提取最显著的特征;文中采用标准正态分布归一化。
激活层主要是提供网络的非线性建模能力,负责将输入端数据映射到输出端,该层主要由激活函数组成,卷积网络中通常采用修正线性单元(Rectified Linear Unit, ReLU)层作为激活函数。ReLU层对输入的每个元素执行阈值操作,当输入值大于等于0时,输出值保持不变,当输入值小于0时输出值为0,其逻辑表达式为
 (10)
(10)
全连接层在整个卷积神经网络中起到一定的特征分类作用,可以将学到的“分布式特征”映射到样本标签空间。
分类层主要由一个全连接层和一个softmax层组成。全连层对提取到的特征进行汇总,并将多维特征转化为二维特征输出,全连接层的输出大小依赖于分类的数量,根据位置估算模型设计需要,全连接层的输出为181。Softmax函数用来表征不同类别之间的相对概率,其表示为
 (11)
(11)
式中,为图像实际分类标签为第k类的分类标签; 为类别函数
为类别函数 的指数值;∑为所有类别的求和符号。
的指数值;∑为所有类别的求和符号。
本文在每个位置从空载到满载按照10%的负载间隔(实际测试中以q轴电流为参考),每个负载下测试5组试验数据,合计每个位置处获得55组试验数据。考虑到逆变器非线性和和电流传感器采样偏差等非理想因素的存在,每组试验采样10个高频注入周期的数据作为试验数据。
一个电角度周期内的分类数量与位置精度直接相关,分类数量越多,可以获得越高的位置估算精度。但较多的分类精度可能需要设计更大的位置估算模型,在权衡位置估算精度和估算模型大小后,本文选择2°估算精度,即把一个电角度周期平均分成180份;实际中由于干扰信号的存在,增加一个干扰信号的分类,此干扰信号的标签值对应位置估计值为前一时刻的位置估算值 。因此,总共需要采集9 955组数据用来做DANN的源数据样本;具体分类标签与角度值的对应关系见表1。
。因此,总共需要采集9 955组数据用来做DANN的源数据样本;具体分类标签与角度值的对应关系见表1。
目标域的数据的收集需要尽可能多包含变载工况的数据,在电机低转速模式,随机改变电机负载的大小,同样以每10个高频注入周期的电流数据为一组数据,为了保证源域数据和目标域数据样本均衡,目标域合计采集9 000组数据作为目标域的数据样本。
表1 位置与模型预测标签之间对应关系
Tab.1 The corresponding between position and labels
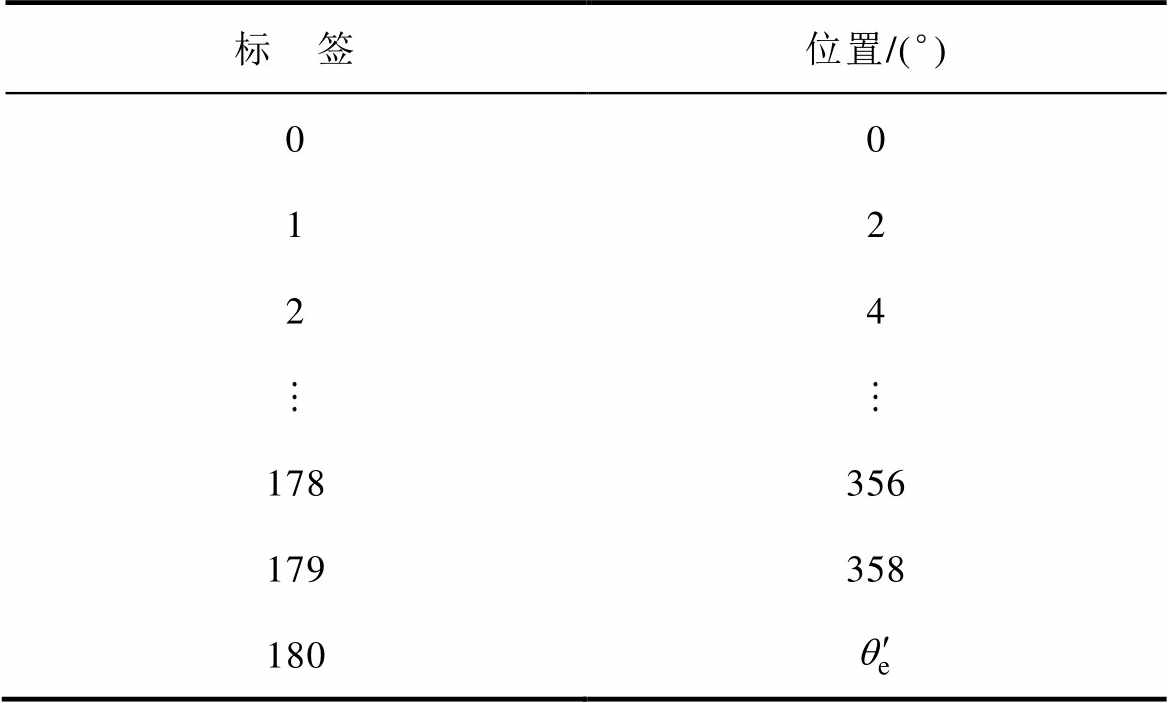
标 签位置/(°) 00 12 24 178356 179358 180
深度神经网络模型中的参数采用随机梯度下降法进行训练,为了保证模型中的权重值和偏置值训练更加充分,将同样的一批数据多次输入该模型中进行训练,并根据分类损失的变化趋势、位置分类识别精度,经过训练验证,该模型设置训练周期Epoch=500进行训练可以达到位置估算精度90%以上的识别效果。
由于加入了对抗训练,容易存在梯度消失和不收敛的问题,为了加快收敛速度,提高模型的鲁棒性,并避免振荡现象的发生,模型的超参数 和学习率
和学习率 随迭代次数动态变化,其中,
随迭代次数动态变化,其中, 为常数10;梯度反转层的超参数
为常数10;梯度反转层的超参数 表达式[30]为
表达式[30]为
 (12)
(12)
学习率随着迭代进程变换为
 (13)
(13)
式中,s为迭代进程相对值,即当前迭代次数与总迭代次数的比率。根据实际测试训练情况,参数设置为:a =10,b =0.75;m0为初始学习率,m0=0.006。最终经过35 000次迭代,图像分类识别率超过90%,能够实现位置的准确分类估计,域分类识别率维持在50%左右,达到混淆源域和目标域的效果,模型的训练结果如图5所示。
在ab 轴坐标下高频旋转电压激励下的高频电流响应,按照图3所示获得重构高频电流矢量,并按照矢量实部沿水平轴、虚部沿纵轴的方式获得电流图像,电流图像预处理后,输入基于训练得到的DANN模型,进行图像的识别分类,并根据网络预测出的标签值,基于表1进行查表(Look Up Table, LUT),获得最终的位置估算值,具体识别过程如图6所示。
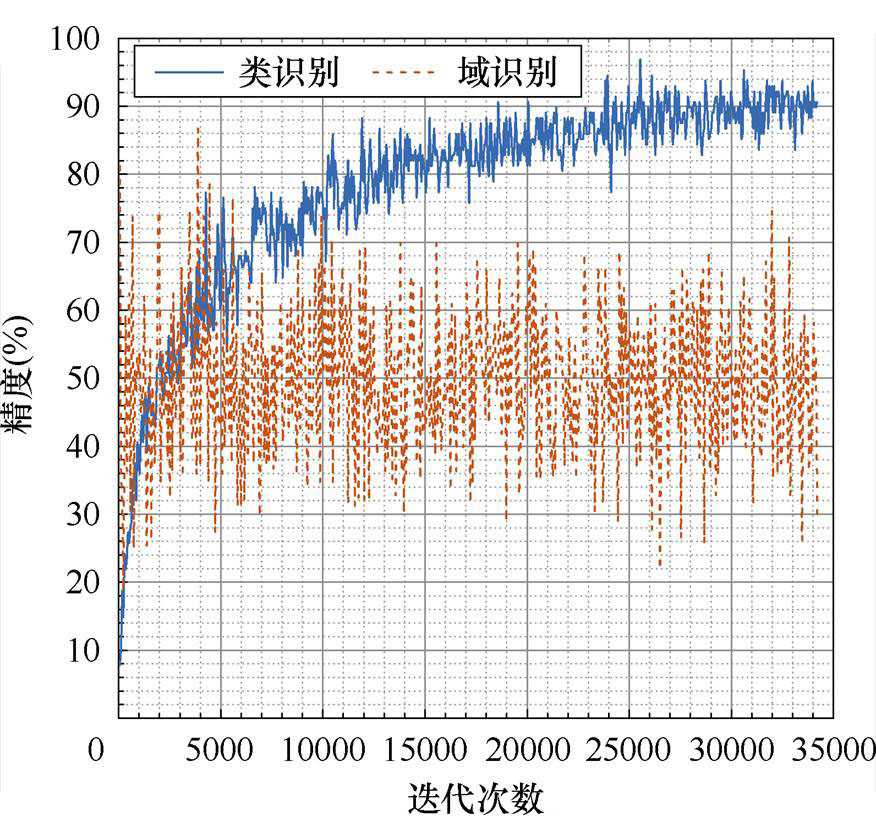
图5 DANN的训练结果
Fig.5 Training results of DANN

图6 基于DANN位置估算过程
Fig.6 The process of position estimation using DANN
为了验证基于DANN进行位置估算的性能,在电机测试平台进行位置估算测试。该实验平台如图7所示,该Speedgoat实时控制器配置有Intel 2.0 GHz四核CPU和FPGA模块,时钟频率为150 MHz,4通道16位A-D转换器,实验时电流采样频率和PWM开关频率均设置为20 kHz;电压源逆变器主要由三相半桥驱动器IR2110strpbf构成;测试所用的表贴式永磁同步电机的参数和高频注入参数见表2。
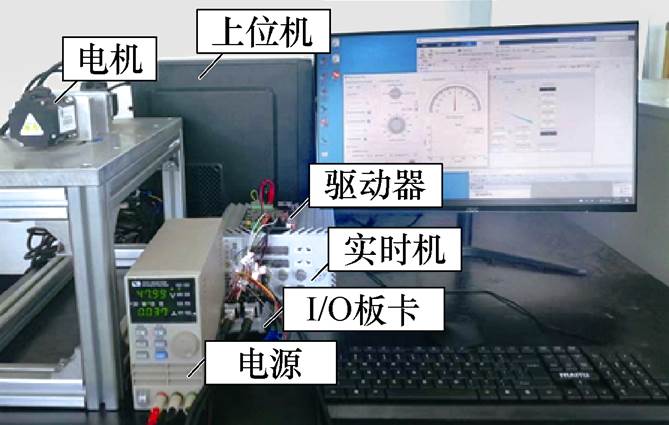
图7 测试实验平台
Fig.7 The experimental platform setup
表2 SPMSM和注入信号参数
Tab.2 Specifications of SPMSM and the injection signal
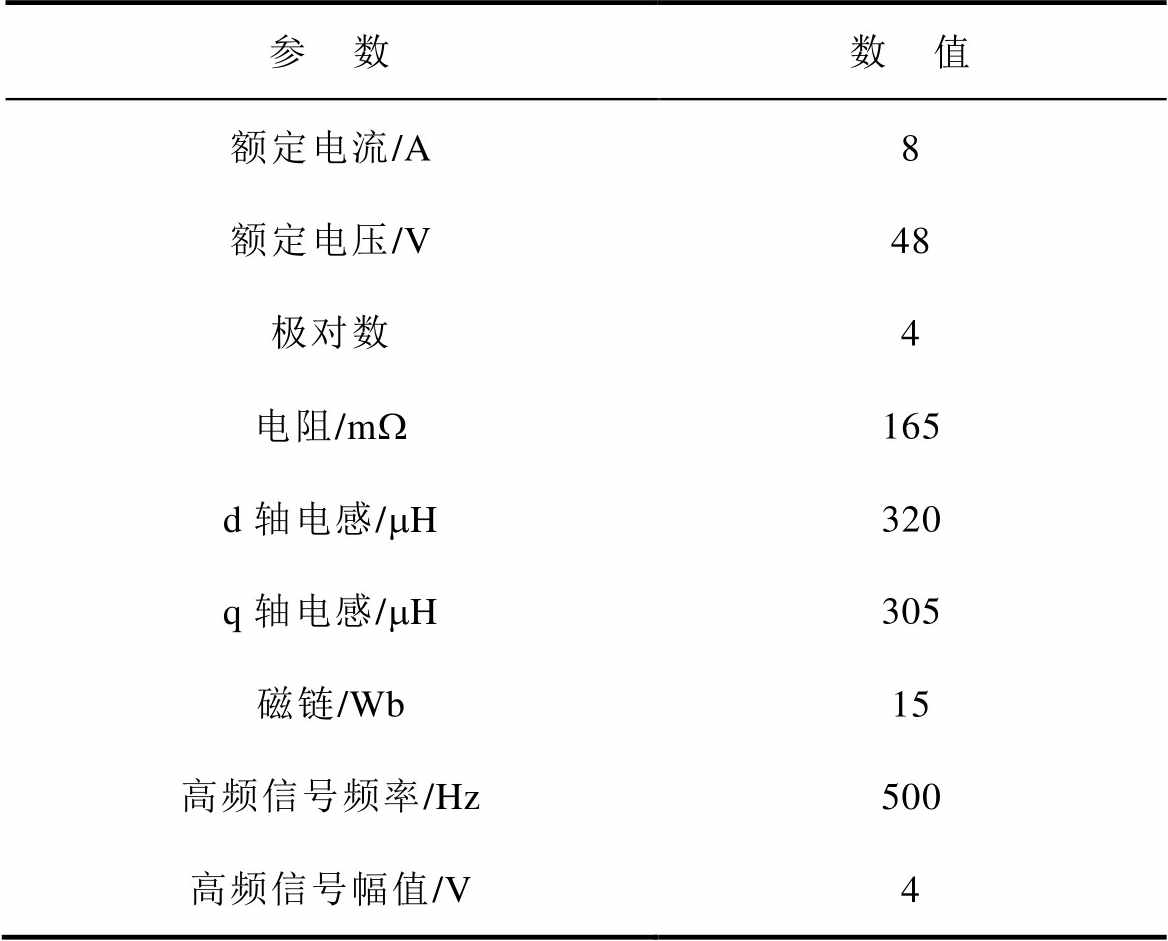
参 数数 值 额定电流/A8 额定电压/V48 极对数4 电阻/mW165 d轴电感/mH320 q轴电感/mH305 磁链/Wb15 高频信号频率/Hz500 高频信号幅值/V4
凸极率可以用来表征电机的凸极性大小,在高频注入下,电机的凸极率 为
为
 (14)
(14)
根据式(14)求解被测电机不同位置处的凸极率,如图8中褐色星号所示,图中,红色圆表示凸极率为1,绿色圆表示平均凸极率,大小为1.06。从图中可以看出,部分位置凸极率接近于1,几乎没有凸极性,低凸极率使含有位置信息的信噪比低,甚至会使传统观测器没法收敛,使基于凸极性进行位置速算的观测器方法面临挑战。
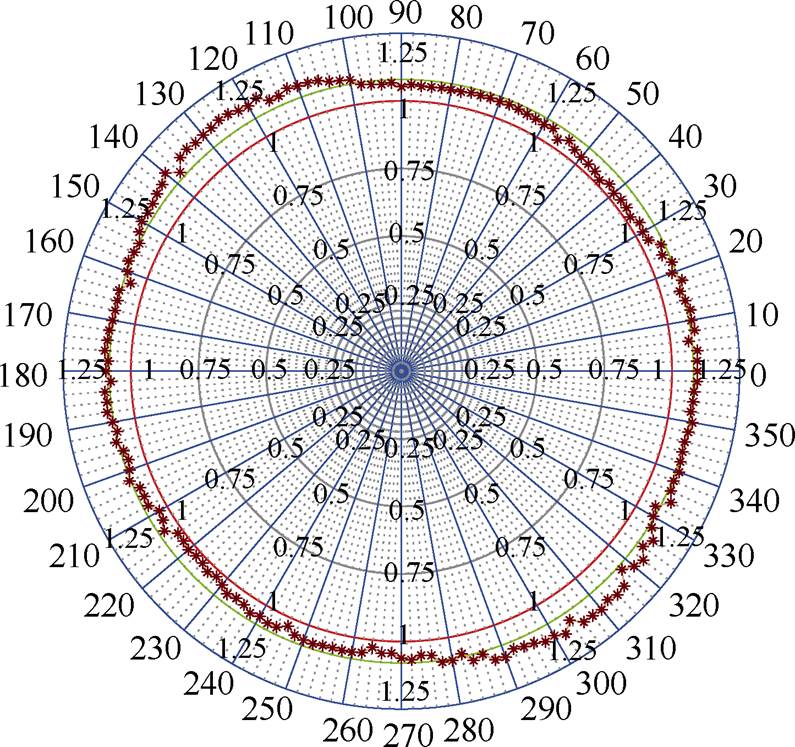
图8 电机凸极率大小
Fig.8 The values of the saliency
为了评估估计位置的性能,定义实际位置 与估计位置
与估计位置 之间的差为
之间的差为
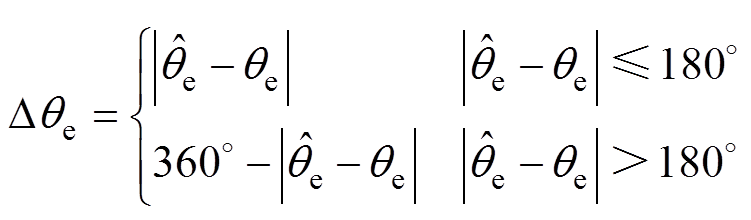 (15)
(15)
传统锁相环位置观测器(Phase-Locked Loop, PLL)如图9所示。高频负序电流含有位置信息,位置误差 可以通过同步旋转滤波器和外差法提取。2次饱和项可以用来进行极性判断,因此可以从负序分量的2次谐波提取极性信息
可以通过同步旋转滤波器和外差法提取。2次饱和项可以用来进行极性判断,因此可以从负序分量的2次谐波提取极性信息 。PLL算法常用来进行同步相位的检测,鉴相器(Phase Detector, PD)主要用来提取转子位置误差;环路滤波器(Loop Filter, LF)由PI调节器用于消除高频信号和噪声信号,输出一个低频的频差信号;压控振荡器(Voltage-Controlled Oscillator, VCO)用于保持输入和输出相位同步。当相位误差为零时,表示输出信号与输入信号同步,获取位置信息。此外,对于极性检测,需要根据估计出的位置信息进行极性信息补偿,即需要用0或
。PLL算法常用来进行同步相位的检测,鉴相器(Phase Detector, PD)主要用来提取转子位置误差;环路滤波器(Loop Filter, LF)由PI调节器用于消除高频信号和噪声信号,输出一个低频的频差信号;压控振荡器(Voltage-Controlled Oscillator, VCO)用于保持输入和输出相位同步。当相位误差为零时,表示输出信号与输入信号同步,获取位置信息。此外,对于极性检测,需要根据估计出的位置信息进行极性信息补偿,即需要用0或 弧度进行补偿修正。当信号为负,则表明估计位置与N极对齐,估计位置不进行额外的补偿或者补偿角度为0°校正;当信号为正,则表示估计位置与S极对齐,需要进行180°补偿。
弧度进行补偿修正。当信号为负,则表明估计位置与N极对齐,估计位置不进行额外的补偿或者补偿角度为0°校正;当信号为正,则表示估计位置与S极对齐,需要进行180°补偿。
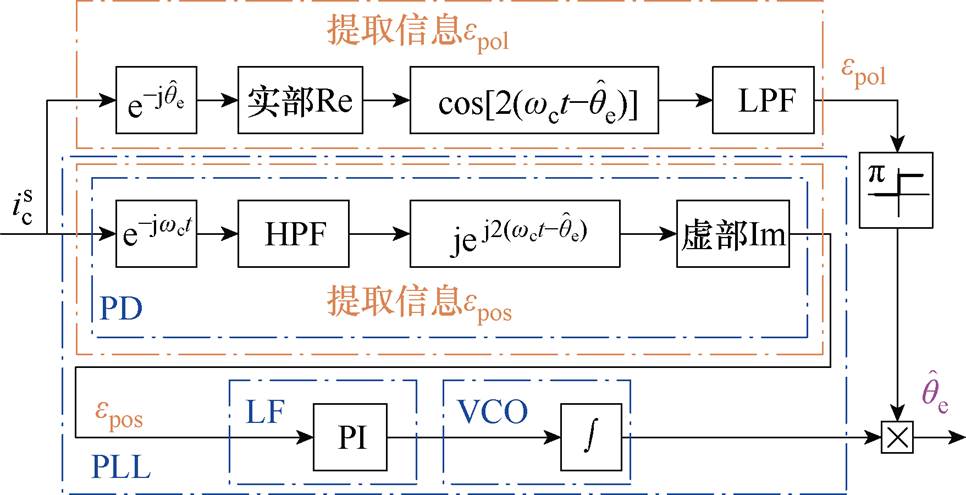
图9 PLL位置观测器
Fig.9 PLL observer for position estimation
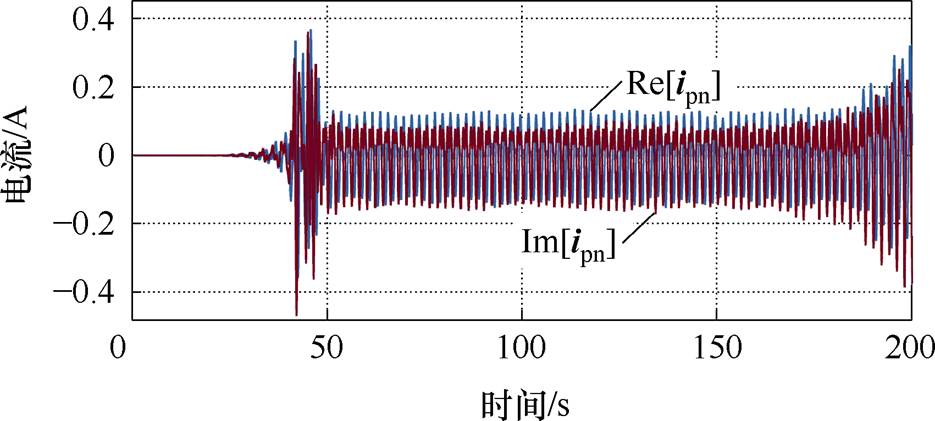
图10所示为当初始位置角=290°时基于PLL观测器的位置估算结果。如图10a中所示,提取的位置误差几乎收敛于0,然而在=290°处估计出的位置值为20°左右,位置估算偏差为90°(360°周期计算的话,位置偏差为270°左右);如图10a所示,在207~248 ms之间出现了明显的干扰信号,导致极性信息的提取出现错误。传统观测器没法从强干扰信号中分离出有效的位置信息,特别是在低SNR情况下,因此,在低SNR情况下,传统位置观测器进行位置估算时往往会出现较大的估算偏差。
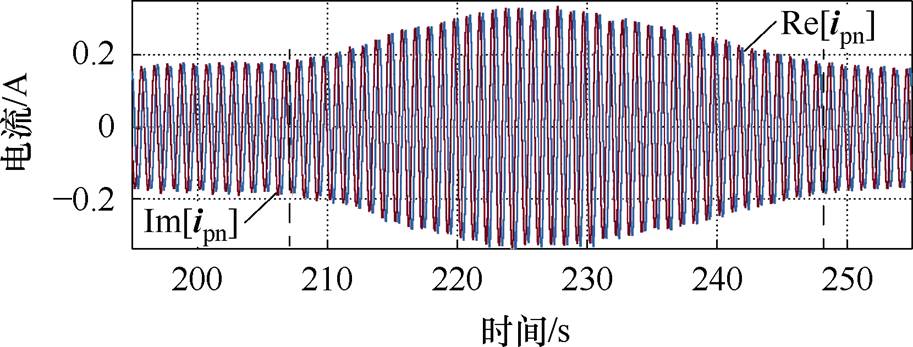
(a)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
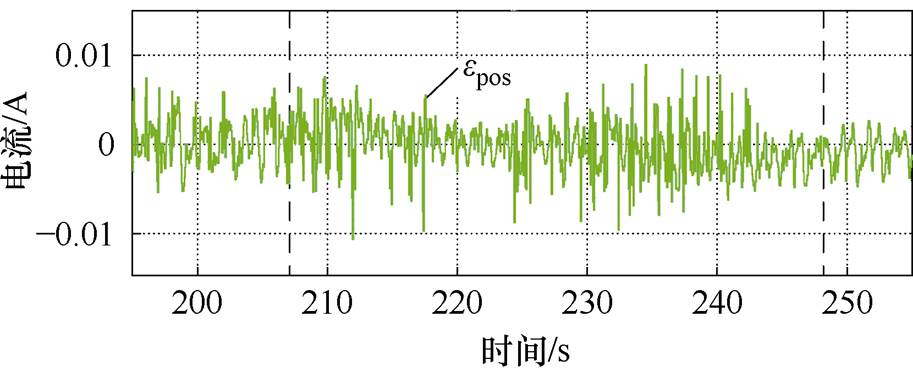
(b)同步旋转滤波器和外差法提取的误差
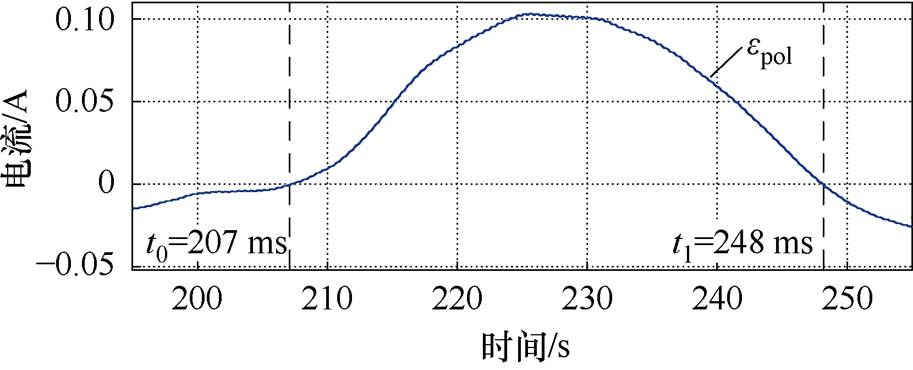
(c)获取的极性信息
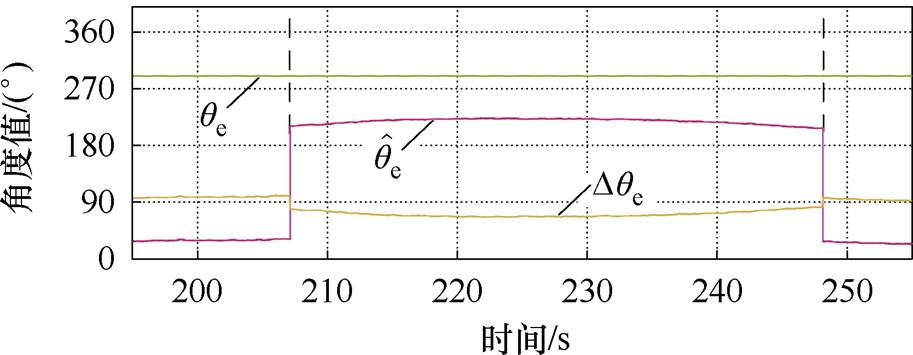
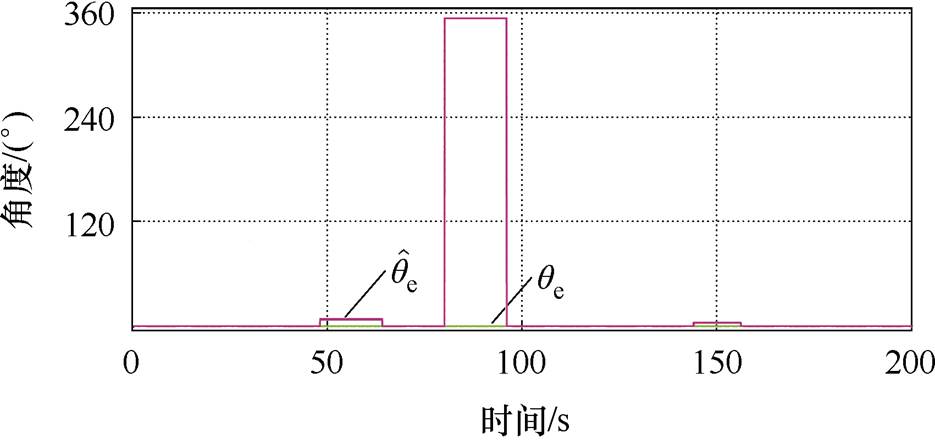
(d)实际位置 、估计位置
、估计位置 以及位置估计误差
以及位置估计误差
图10  =290°锁相环观测器的位置估算结果
=290°锁相环观测器的位置估算结果
Fig.10 Position estimation result of PLL observer at=290°
PLL观测器的位置估算误差如图11所示,棕色星号(*)表示在范围为0~358°,每间隔2°,180个位置的位置估算偏差。结果显示只有少数估算偏差落在蓝圆(30°)内,位置估算偏差小于30°,很多位置估算偏差已落在红色圆(90°)之外,这也说明基于传统PLL观测器对低凸极率电机进行位置估计存在较大偏差。偏差较大的原因除了低凸极率导致的低信噪比外,位置估算值还容易受到转子绕组、磁场交叉饱和效应、死区、逆变器非线性等影响。
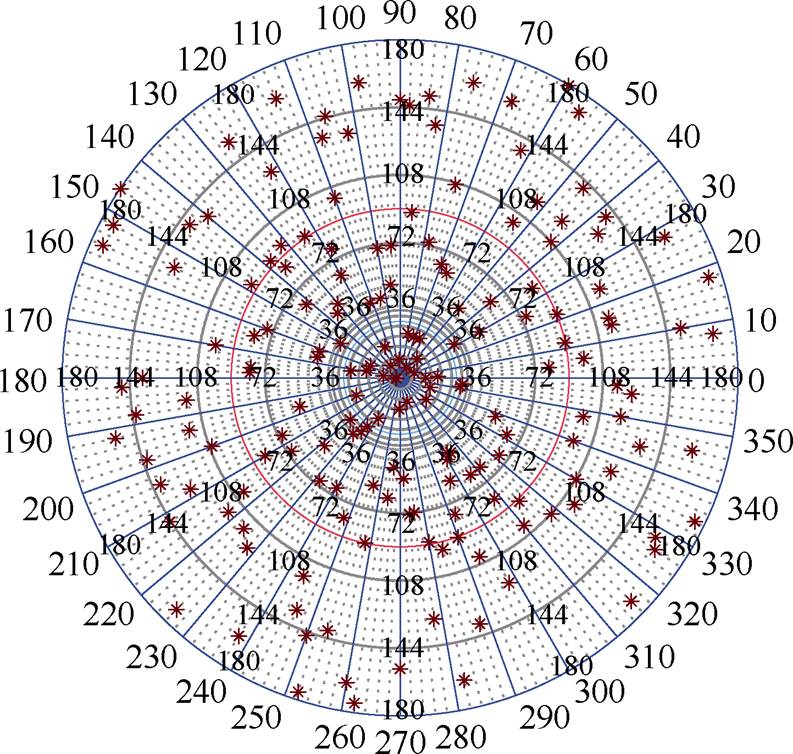
图11 PLL观测器的位置估算误差
Fig.11 Position estimation error of PLL observer
5.5.1 初始位置估计
在静止状态下分别进行电机在无负载和带载情况下的位置估算测试,实验结果分别如图12、图13所示。
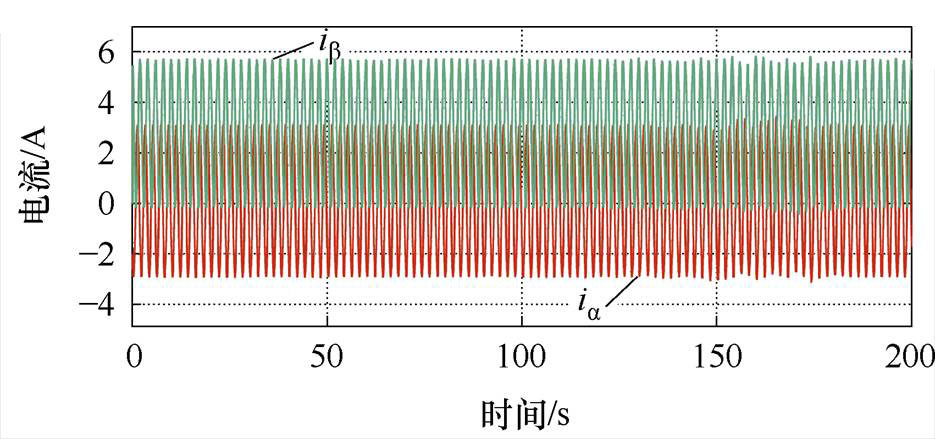
(a)在ab 轴坐标下的高频电流ia、ib
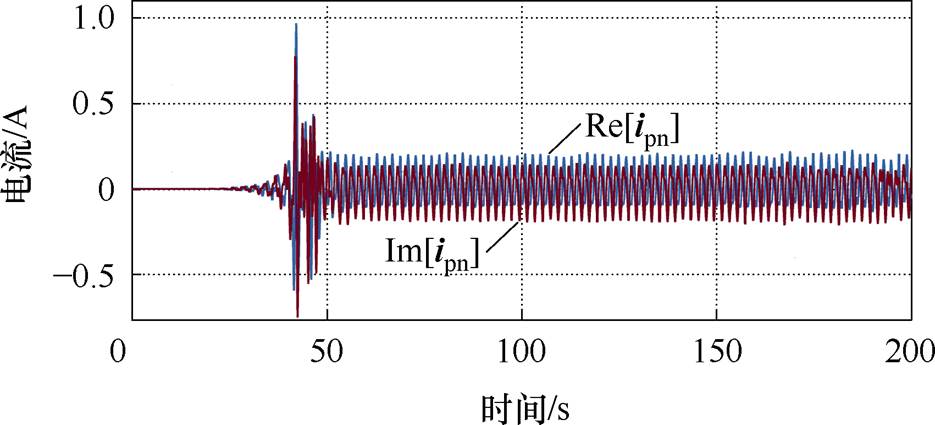
(b)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
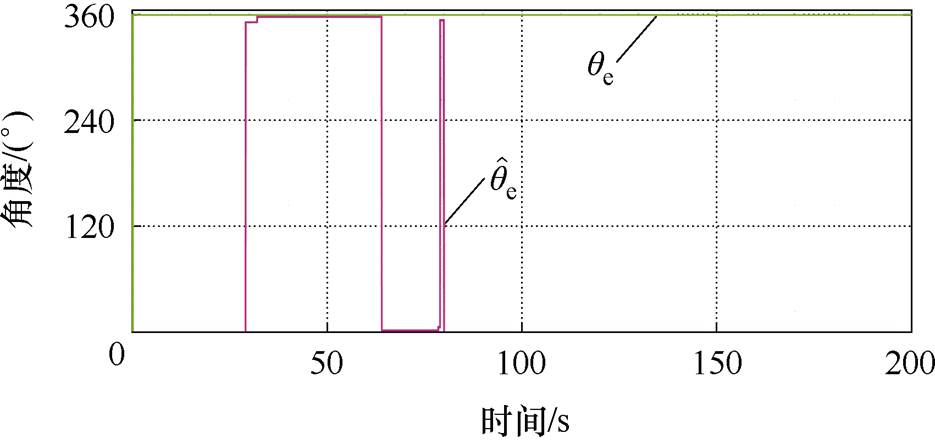
(c)估计值与实际位置的大小
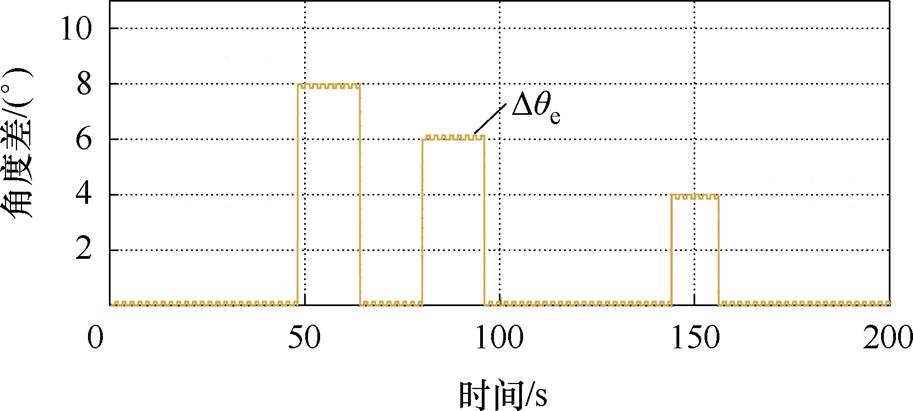
(d)位置偏差值
图12 0° DANN空载工况位置估算结果
Fig.12 Experimental results of position estimation at =0° without load using DANN
(a)在ab 轴坐标下的高频电流ia、ib
(b)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
(c)估计值与实际位置的大小
(d)位置偏差值
图13 0° DANN带载工况的位置估算结果
Fig.13 Experimental resultsof position estimation at =0° withload using DANN
从图12b可以看出,重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值在50~180 ms这段正常数据区间的幅值0.2 A左右;位置估计偏差值最大为8°,在50~200 ms区间的位置偏差平均值为1.76°。
从图13b可以看出,重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值在50~200 ms这段正常数据区间的幅值0.3 A左右,比图12所示无负载下的幅值大,这也说明在带载情况下,该电机各向异性更为明显,更有利于位置的识别;在整个过程中,最大位置估计偏差值为8°,在50~200 ms区间的位置偏差平均值为0.57°。
5.5.2 位置估算鲁棒性分析
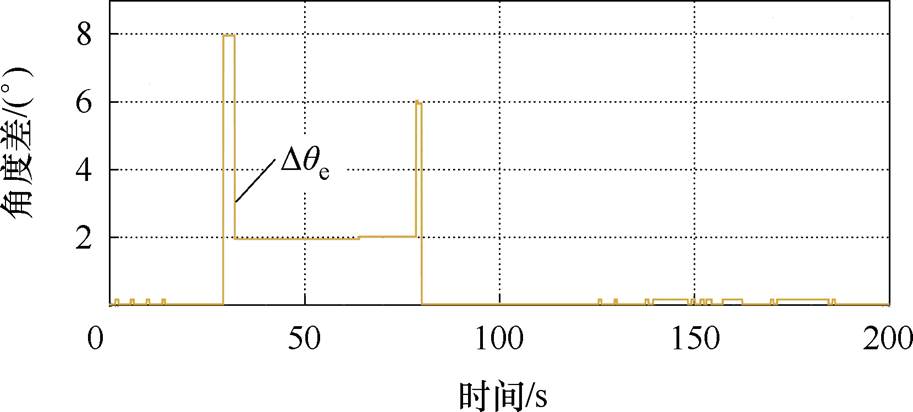
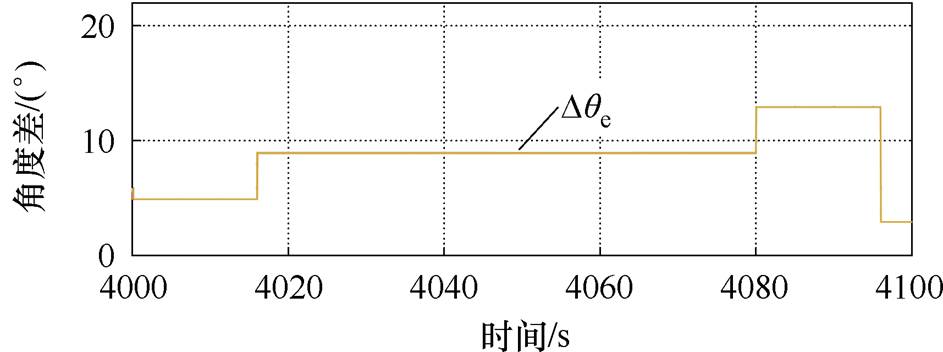
干扰信号识别估计如图14所示,在4 020~4 060 ms的时间范围内,提取的高频电流存在着明显的干扰信号,干扰信号的幅值甚至超过了正常的高频信号,传统滤波器的方法对类似干扰信号的处理则面临极大的挑战;然而,基于图像识别的方法通过增加干扰信息的分类,使干扰信号很容易被识别出来,使在4 048~4 080 ms被准确识别干扰信号的分类标值180,根据设计的位置估算方法,此时位置估计值保持前一时刻的位置估计值输出,避免了干扰信号给位置估算带来较大的负面影响。
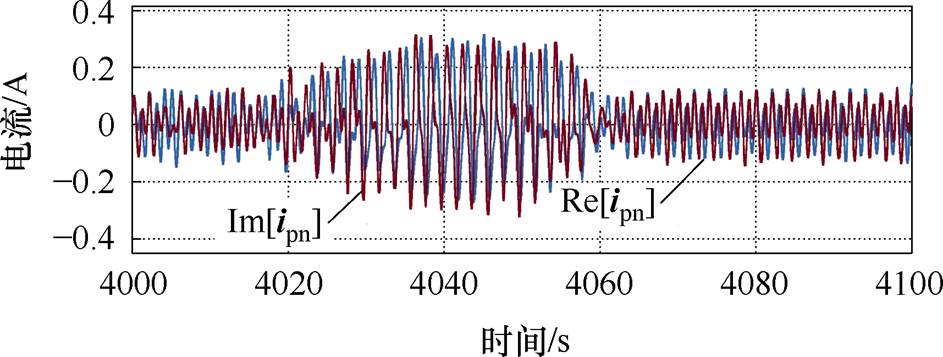
(a)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
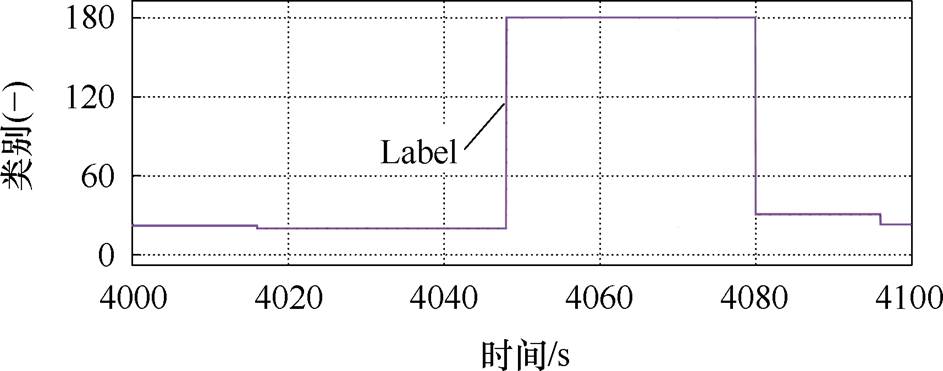
(b)模型估计分类标签Label
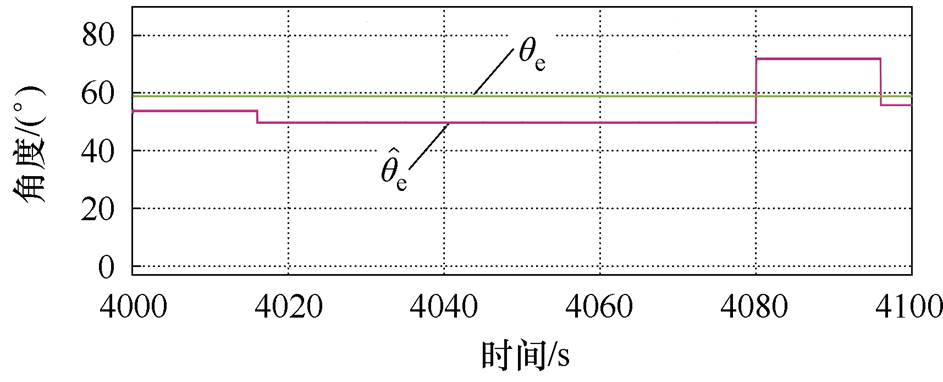
(c)估计值与实际位置的大小
(d)位置偏差值
图14 干扰信号识别估计
Fig.14 Interference signal recognition and estimation
5.5.3 低速空载实验
在低速空载工况下对基于DANN高频电流图像识别进行位置估计及验证,实验结果如图15所示,从实验结果可以看出,本文所提方法获得的位置估计值能够跟随实际位置的变化,大部分估计的位置偏差小于10°,与图11所示PLL观测器在很多位置处估算偏差都超过90°相比,本文所提方法还是有可观的应用潜力,但是正如图15中所示,也存在一些位置估算偏差超过20°的情况(最大位置偏差36°),这主要是因为虽然基于二维图像识别的位置估算方法能够发掘数据中蕴含的微弱位置信息,但是该方法仍然是基于电机的各向异性进行位置估算,电机各向异性差异性越小,对高精度的位置估计带来的挑战越大。理论上,进一步提高位置的估算精度可通过设计更复杂的数据特征提取器对数据进行增强处理,例如通过增大输入层的尺寸、增加卷积核个数、增加更多的干扰信号的分类等手段来获取更多的特征信息,但实际情况受到算力的限制,位置估算偏差只能做到尽可能小,要完全消除估算偏差还是存在挑战。
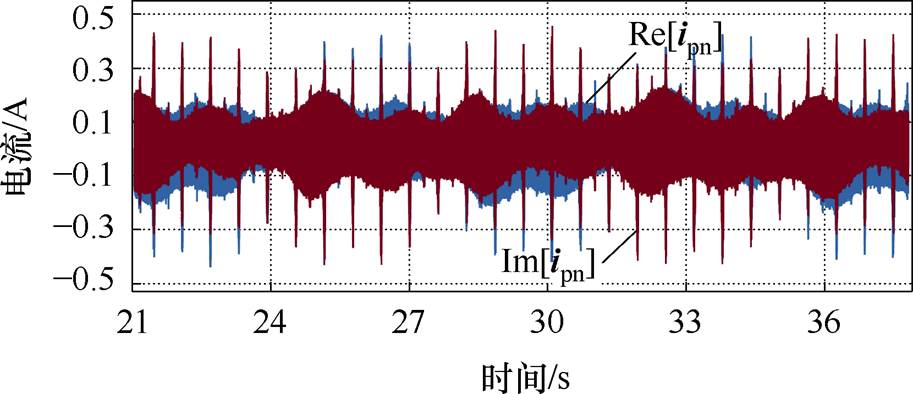
(a)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
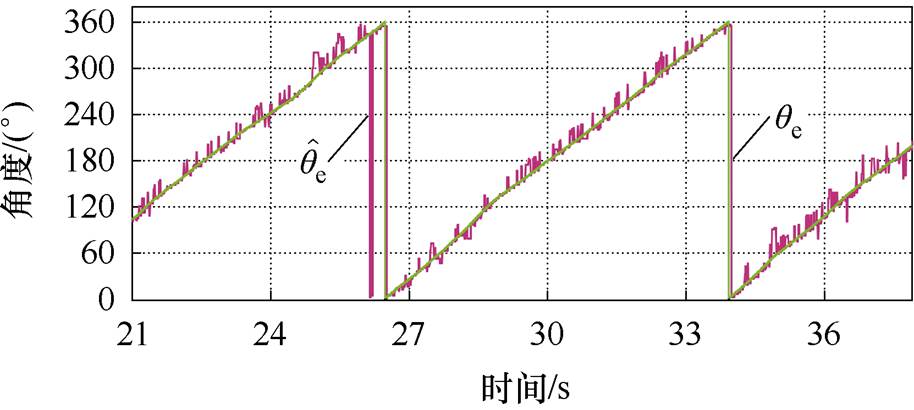
(b)估计值与实际位置的大小
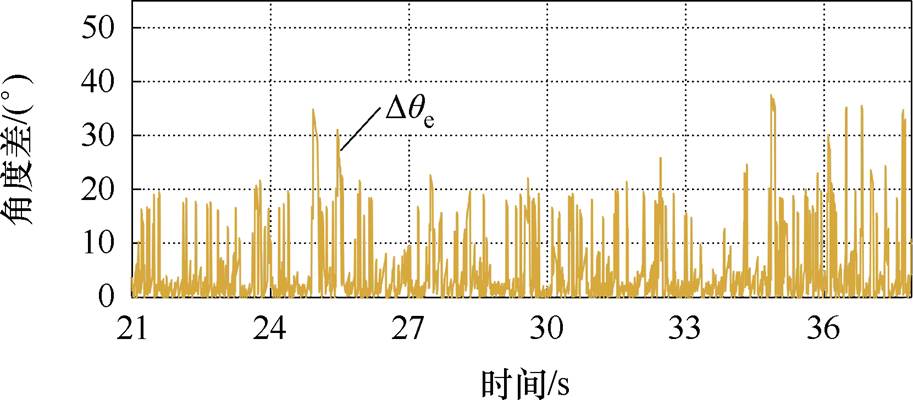
(c)位置偏差值
图15 DANN低速空载下的位置估算结果
Fig.15 Experimental result of position estimation performance at low speed using DANN
5.5.4 低速带载实验
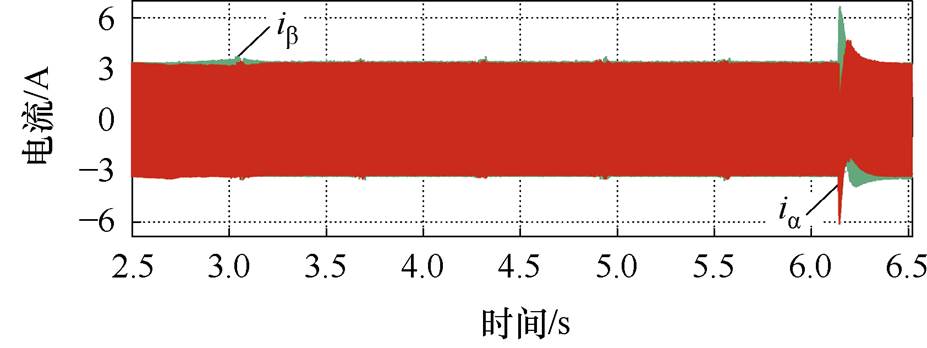
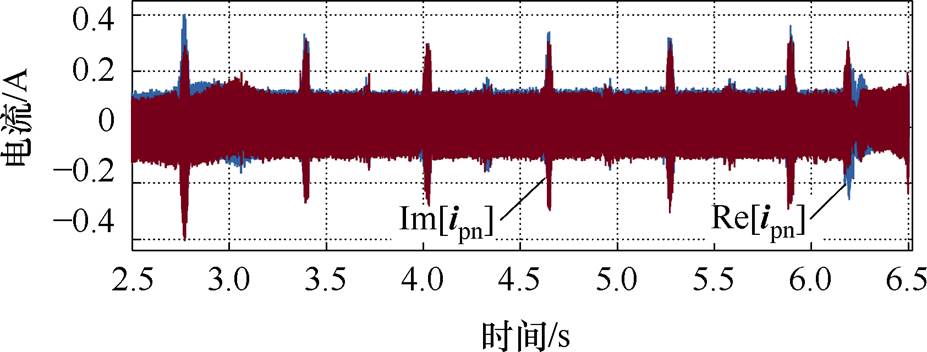
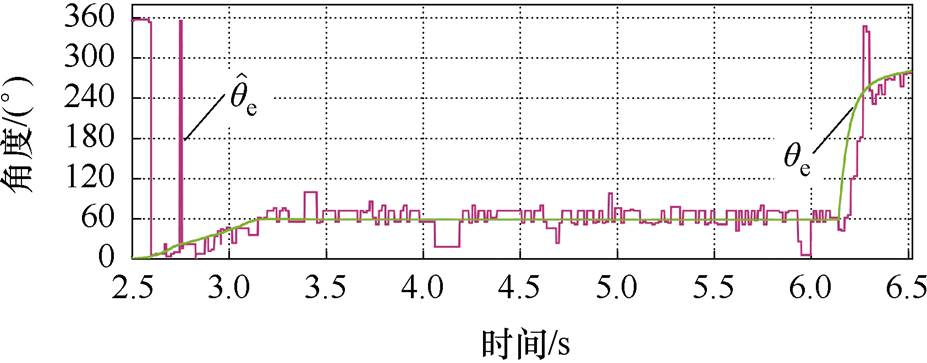
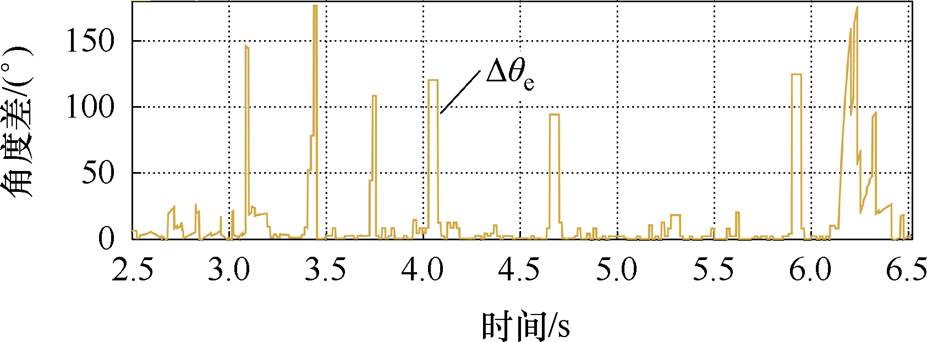
为了评估DANN对不同于训练集数据概率分布数据的估算性能,在电机低速运行时给测试电机一个阻力转矩,使电机堵转(如图16中3.1~6.1 s所示),然后突然撤去阻力转矩的测试条件下进行测试,实验结果如图16所示,并与单流结构的CNN进行位置估算的实验结果进行对比。
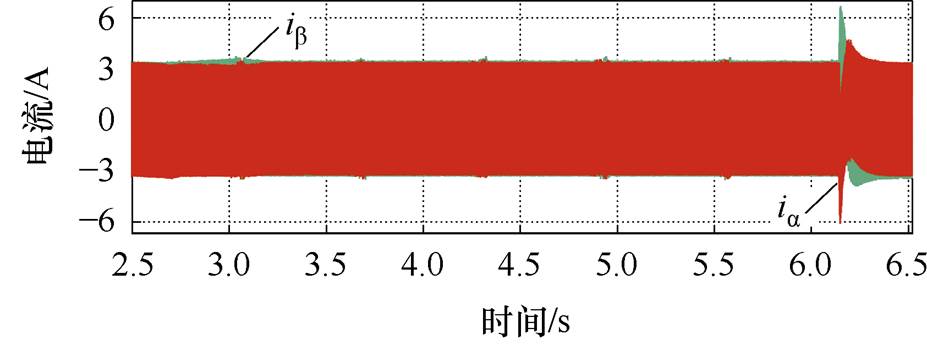
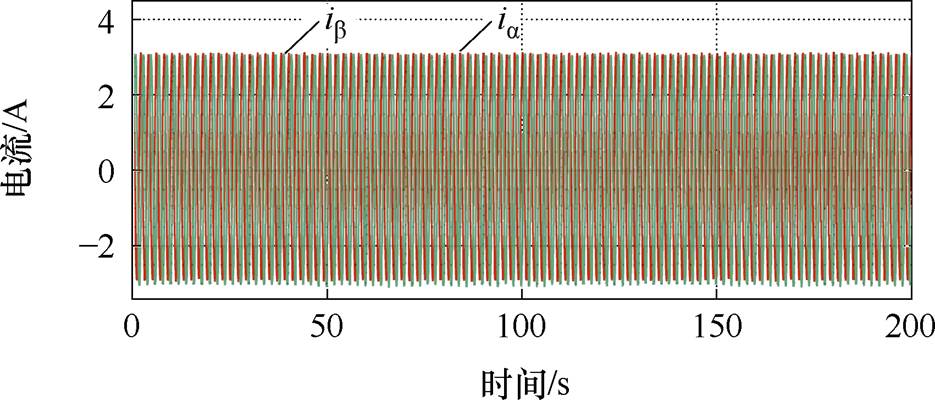
(a)在ab 轴坐标下的高频电流ia、ib
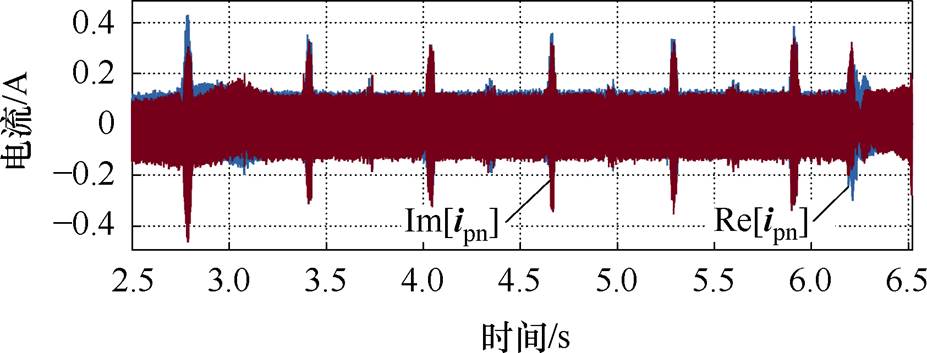
(b)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
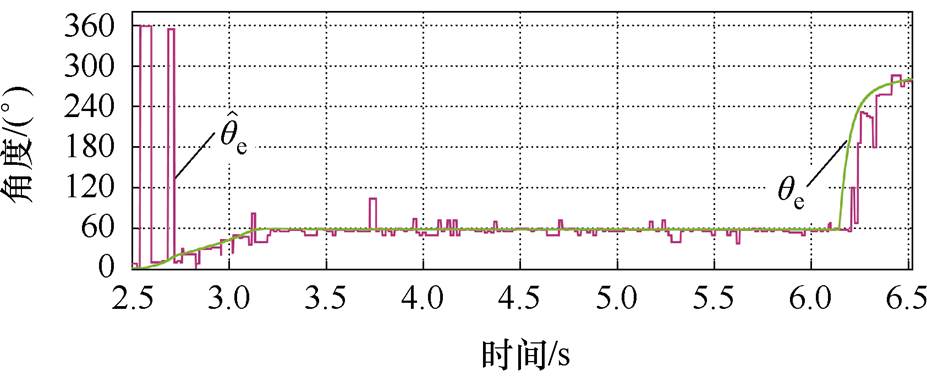
(c)估计值与实际位置的大小
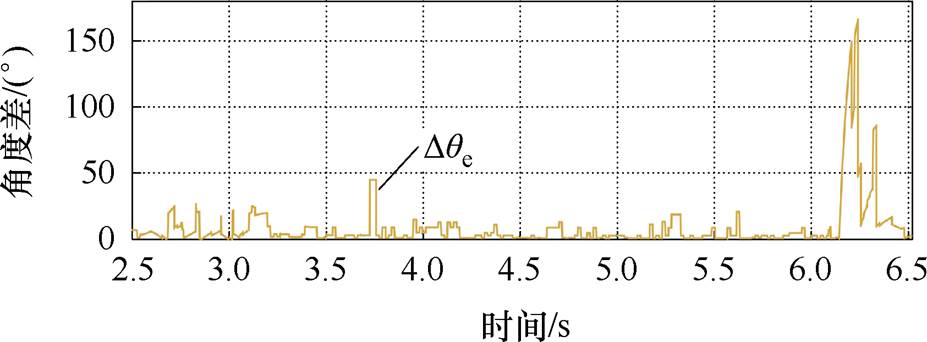
(d)位置偏差值
图16 DANN在低速堵转下的位置估算结果
Fig.16 Experimental result of position estimation performance at low speed with locked using DANN
从实验结果中可以看出,基于DANN对高频电流图形进行识别的位置估计值,仅在突然撤去阻力转矩阶段,位置估算偏差值也超过150°(最大偏差值为165.7°)。这主要是因为撤转矩过程过于短暂,基于图像识别的位置估计会因为没法短时间内获得一个完整的10个高频注入周期的图像进行准确运算的结果;在堵转阶段位置偏差值都小于50°,整个实验过程的位置偏差平均值为8.6°。
为了显示CNN的估算结果,基于CNN在低速堵转情况下实验结果如图17所示,从实验结果中可以看出,基于CNN对高频电流图形进行识别的位置估计值,在堵转阶段以及突然撤去阻力转矩阶段,位置估算偏差较大,在堵转阶段位置偏差有很多位置处偏差值超过100°,与5.5.3节低速空载下测试的最大误差值不超过40°相比,位置估算性能明显地下降,这主要是因为负载条件的变化导致高频电流图像的数据概率分布与训练集的数据概率分布存在差异。在突然撤转矩过程中位置偏差值最大超过150°(最大偏差值177.2°)。在堵转阶段位置偏差值都小于50°,整个实验过程的位置偏差平均值为13.2°。
(a)在ab 轴坐标下的高频电流ia、ib
(b)重构复合高频矢量的实部Re[ipn]和虚部Im[ipn]值
(c)估计值 与实际位置的大小
与实际位置的大小
(d)位置偏差值
图17 CNN在低速堵转下的位置估算结果
Fig.17 Experimental result of position estimation performance at low speed with locked using CNN
通过基于DANN与CNN在不同训练集数据概率分布的新数据下的位置估算对比,结果见表3。基于CNN的位置估算最大误差值超过177.2°,整个估算过程的位置偏差均值为13.2°;基于DANN位置估算的最大位置偏差165.7°,平均位置估算偏差8.6°。从最大偏差值、平均偏差值以及整个过程的位置偏差值的结果对比看,基于DANN相比CNN网络的位置估算性能有很大改善。
表3 CNN和DANN对新数据位置估计对比
Tab.3 Comparison of result of position estimation for new data using CNN and DANN
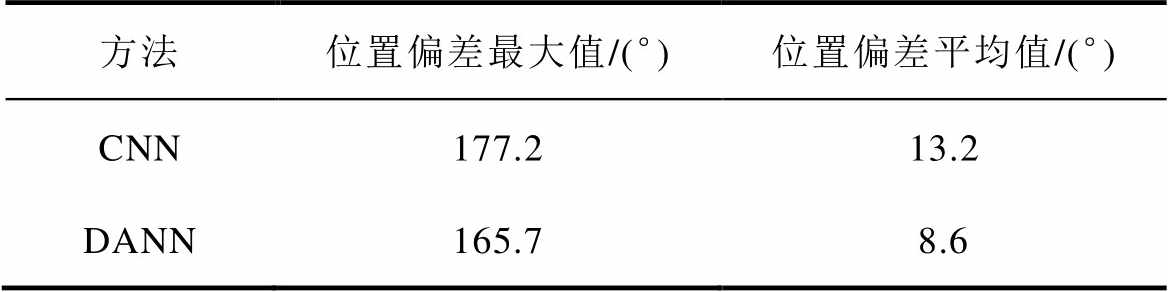
方法位置偏差最大值/(°)位置偏差平均值/(°) CNN177.213.2 DANN165.78.6
通过在静态和低速空载和带载下测试,实验结果显示,DANN进行基于图像识别的位置估算结果都能实现传统观测器进行位置估计所不能达到的效果;在堵转工况下实验结果显示,在对新的未知数据与训练集有较大数据概率分布差异数据进行预测时,DANN位置估算效果明显优于用CNN进行位置估计效果,这也说明双流结构的DANN模型比单流结构的CNN模型有着更好的数据泛化能力。
对于基于训练数据学习得到深度学习模型对新数据进行位置估算存在性能下降的问题,本文提出了基于领域自适应对抗网络的初始位置估算方法,该方法首先通过特征提取器和分类器建立高频电流二维图像与位置的映射关系,实现通过图像识别的方式来进行位置估计;然后通过数据分布自适应的对抗学习,获得领域的不变特征,从而实现对未知待测新数据的准确识别,提升位置估算模型的数据泛化能力。通过实验对比分析,可以得出以下结论:
1)通过学习图像和位置之间的相关性,基于图像识别的位置估算方法,能够最大限度地提取高频电流图像数据中蕴含的位置信息,通过对激励电流图像识别的方法进行位置估计,为传统位置观测器对低凸极率电机的初始位置估算所面临的挑战提供了解决方案。
2)通过引入梯度反转层,实现领域与目标域的对抗,达到数据分布自适应的迁移学习,获得领域的不变特征的效果,从而即使在待测数据对与训练集有较大数据概率分布差异时,仍能获得较好的位置估算结果;具备自主对抗学习双流结构的DANN模型,相比单流结构的CNN网络模型具备更好的领域泛化能力和更强的鲁棒性,该方法能够显著改善在训练样本少、标注成本高的场景下深度学习预测效果差的问题,同时为机器学习在工业上的应用探索提供了理论和实践依据。
本文所提方法虽然在对与训练集有较大数据概率分布差异的新数据进行预测时,能够获得较好的估算结果,但由于受到控制器算力的限制,在某些突变工况以及较多干扰情况下,位置估算也存在较大偏差,需要进一步的优化;双流结构DANN训练过程比较复杂,需要经过大量的调参尝试,如何调整训练参数及降低DANN训练难度,有待下一步的探索研究。
参考文献
[1] Mai Zhiqin, Xiao Fei, Fu Kangzhuang, et al. HF pulsating carrier voltage injection method based on improved position error signal extraction strategy for PMSM position sensorless control[J]. IEEE Transa- ctions on Power Electronics, 2021, 36(8): 9348-9360.
[2] Zhang Xing, Li Haoyuan, Yang Shuying, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal injection[J]. IEEE Transactions on Industrial Elec- tronics, 2018, 65(6): 4702-4713.
[3] 杨洛鸿, 刘侃, 胡伟, 等. 基于交轴磁链辨识的永磁同步电机位置传感器零位校正方法[J]. 电气工程学报, 2022, 17(4): 163-173.
Yang Luohong, Liu Kan, Hu Wei, et al. A q-axis flux linkage identification based zero-correction for position sensor of permanent magnet synchronous motor[J]. Journal of Electrical Engineering, 2022, 17(4): 163-173.
[4] Wu Lijian, Lü Zekai, Chen Zekai, et al. An enhanced sensorless control scheme for PMSM drives con- sidering self-inductance asymmetry[J]. CES Transa- ctions on Electrical Machines and Systems, 2022, 6(4): 384-392.
[5] Sun Qingguo, Zhu Xiaolei, Niu Feng. Sensorless control of permanent magnet synchronous motor based on new sliding mode observer with single resistor current reconstruction[J]. CES Transactions on Electrical Machines and Systems, 2022, 6(4): 378-383.
[6] 梅三冠, 卢闻州, 樊启高, 等. 基于滑模观测器误差补偿的永磁同步电机无位置传感器控制策略[J]. 电工技术学报, 2023, 38(2): 398-408.
Mei Sanguan, Lu Wenzhou, Fan Qigao, et al. Sensorless control strategy of permanent magnet synchronous motor based on error compensation estimated by sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 398- 408.
[7] Xu Wei, Wang Lei, Liu Yi, et al. Improved rotor flux observer for sensorless control of PMSM with adaptive harmonic elimination and phase com- pensation[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(2): 151-159.
[8] Yin Zhonggang, Gao Fengtao, Zhang Yanqing, et al. A review of nonlinear Kalman filter appling to sensorless control for AC motor drives[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(4): 351-362.
[9] Tu Xuan, Hou Xinguo, Zhao Jinghong, et al. Speed identification of speed sensorless linear induction motor based on MRAS[J]. CES Transactions on Electrical Machines and Systems, 2023, 7(3): 294- 300.
[10] Chen Zhiqian, Tomita M, Doki S, et al. An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2003, 50(2): 288-295.
[11] De Angelo C, Bossio G, Solsona J, et al. Mechanical sensorless speed control of permanent-magnet AC motors driving an unknown load[J]. IEEE Transa- ctions on Industrial Electronics, 2006, 53(2): 406- 414.
[12] Solsona J, Valla M I, Muravchik C. On speed and rotor position estimation in permanent-magnet AC drives[J]. IEEE Transactions on Industrial Electronics, 2000, 47(5): 1176-1180.
[13] Zhang Yanping, Yin Zhonggang, Bai Cong, et al. A rotor position and speed estimation method using an improved linear extended state observer for IPMSM sensorless drives[J]. IEEE Transactions on Power Electronics, 2021, 36(12): 14062-14073.
[14] Li Haitao, Zheng Shiqiang, Ren Hongliang. Self- correction of commutation point for high-speed sensorless BLDC motor with low inductance and nonideal back EMF[J]. IEEE Transactions on Power Electronics, 2017, 32(1): 642-651.
[15] Song Xinda, Fang Jiancheng, Han Bangcheng, et al. Adaptive compensation method for high-speed surface PMSM sensorless drives of EMF-based position estimation error[J]. IEEE Transactions on Power Electronics, 2016, 31(2): 1438-1449.
[16] De Kock H W, Kamper M J, Kennel R M. Anisotropy comparison of reluctance and PM synchronous machines for position sensorless control using HF carrier injection[J]. IEEE Transactions on Power Electronics, 2009, 24(8): 1905-1913.
[17] Wei Jiadan, Wang Junjie, Zhang Zhuoran, et al. Frequency-insensitive rotor position estimation method for three-stage synchronous machine based on indirect high-frequency signal injection[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2): 1785-1793.
[18] Han Bangcheng, Shi Yangyang, Song Xinda, et al. Initial rotor position detection method of SPMSM based on new high frequency voltage injection method[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3553-3562.
[19] Zhang Guoqiang, Wang Gaolin, Yuan Bihe, et al. Active disturbance rejection control strategy for signal injection-based sensorless IPMSM drives[J]. IEEE Transactions on Transportation Electrification, 2018, 4(1): 330-339.
[20] Szalai T, Berger G, Petzoldt J. Stabilizing sensorless control down to zero speed by using the high- frequency current amplitude[J]. IEEE Transactions on Power Electronics, 2014, 29(7): 3646-3656.
[21] Slininger T S, Xu Yinghan, Lorenz R D. Enhancing estimation accuracy by applying cross-correlation image tracking to self-sensing including evaluation on a low saliency ratio machine[C]//2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 2016: 1-7.
[22] Wang Gaolin, Valla M, Solsona J. Position sensorless permanent magnet synchronous machine drives-a review[J]. IEEE Transactions on Industrial Elec- tronics, 2020, 67(7): 5830-5842.
[23] 麦志勤, 肖飞, 刘计龙, 等. 基于改进型自调整轴系幅值收敛电流解调算法的旋转高频电压注入法[J]. 电工技术学报, 2021, 36(10): 2049-2060.
Mai Zhiqin, Xiao Fei, Liu Jilong, et al. Rotating high-frequency voltage injection method based on improved self-adjusting frame amplitude convergence current demodulation algorithm[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2049- 2060.
[24] Raca D, Garcia P, Reigosa D D, et al. Carrier-signal selection for sensorless control of PM synchronous machines at zero and very low speeds[J]. IEEE Transactions on Industry Applications, 2010, 46(1): 167-178.
[25] 吴春, 陈科, 南余荣, 等. 考虑交叉饱和效应的变角度方波电压注入永磁同步电机无位置传感器控制[J]. 电工技术学报, 2020, 35(22): 4678-4687.
Wu Chun, Chen Ke, Nan Yurong, et al. Variable angle square-wave voltage injection for sensorless control of PMSM considering cross-saturation effect[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4678-4687.
[26] Wang Henghong, Wang Jiyao, Xu Wei. A high precision initial position estimation method for low saliency ratio machine based on image tracking[J]. IEEE Transactions on Power Electronics, 2023, 38(11): 13612-13624.
[27] Kim H, Huh K K, Lorenz R D, et al. A novel method for initial rotor position estimation for IPM synchronous machine drives[J]. IEEE Transactions on Industry Applications, 2004, 40(5): 1369-1378.
[28] Degner M W, Lorenz R D. Using multiple saliencies for the estimation of flux, position, and velocity in AC machines[J]. IEEE Transactions on Industry Applications, 1998, 34(5): 1097-1104.
[29] Martin K. Complex signal processing is not- complex[C]//ESSCIRC 2004-29th European Solid- State Circuits Conference, Estoril, Portugal, 2003: 3-14.
[30] Ganin Y, Lempitsky V. Unsupervised domain adaptation by backpropagation[C]//Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 2015: 1180-1189.
Abstract The low-speed sensorless control of the permanent magnet synchronous motor (PMSM) primarily depends on the motor's saliency characteristics. However, the surface-mounted permanent magnet synchronous motor (SPMSM) exhibits a low inductive saliency ratio, leading to a poor signal-to-noise ratio (SNR) in position signals. It challenges traditional high-frequency injection position estimation models in achieving high-precision estimation. Deep machine learning can extract features from subtle signals and accurately determine position even in low SNR environments. However, traditional supervised machine learning methods require abundant labeled training data. In practical applications, instantaneous load variations make it challenging to collect comprehensive samples and accurately label position tags, thus impacting the generalization ability of position estimation models trained on steady-state datasets. This paper proposes a data domain-adversarial neural network (DANN). This method enhances the traditional convolutional neural network (CNN) by introducing a domain classifier and a gradient reversal layer (GRL), transitioning from a single-stream to a dual-stream structure. The two networks learn invariant domain features, adapt data distribution, and mitigate the degraded position estimation by anti-transfer learning.
Balanced three-phase high-frequency excitation voltages are applied to the three-phase windings of the motor in the stationary reference frame. The negative-sequence first-order component and the positive-sequence second-harmonic component of the high-frequency response current are combined to form a new current vector, facilitating the extraction of position and polarity information. These reconstructed current vectors are graphically depicted and employed as inputs for the CNN. Implicit position feature information is extracted from two-dimensional images, and a correspondence between the images and the rotor positions is established through training. Consequently, the CNN model accurately recognizes two-dimensional images for position estimation. This CNN network is used as the feature extractor in the DANN network, incorporating a domain discriminator to distinguish input features from the source and target domains. Furthermore, a gradient reversal layer (GRL) is introduced between the feature extractor and the domain classifier. In backpropagation, the gradient parameters of the loss function in the domain classifier are reversed, which facilitates adversarial learning and aligns the probability distribution of new test data with the training set.
Experimental results indicate that traditional observers have significant errors in position estimation, with numerous deviations exceeding 90°. The CNN-based position estimation model maintains an average positional deviation of 13.2°, whereas the DANN-based model further decreases this deviation to 8.6°. When predicting new, unfamiliar data, the DANN model exhibits notably superior position estimation performance compared to the CNN model. The dual-stream DANN model can precisely estimate the initial position of motors with low saliency ratios, and position estimation results on new data are improved. Consequently, the poor data generalization ability inherent in the single-stream CNN position estimation model is mitigated.
The following conclusions are drawn. By leveraging the correlation between images and positions, image recognition-based position estimation methods enable accurate position determination through high-frequency current image recognition, solving the issue of the initial position estimation with low saliency ratios. Introducing the gradient reversal layer for domain adversarial learning facilitates data distribution-adaptive transfer learning. The position can be accurately estimated even with notable disparities in data probability distributions between test data and the training set. The dual-stream DANN model demonstrates superior domain generalization capability and enhanced robustness compared to the single-stream CNN network model. This approach improves the predictive performance of deep learning in scenarios of limited training samples and high labeling costs. A robust theoretical and practical framework for industrial machine-learning applications has been established.
keywords:Image recognition, transfer learning, network adversarial, data-adaptive, data generalization
DOI: 10.19595/j.cnki.1000-6753.tces.232019
中图分类号:TM614
国家自然科学基金资助项目(52275009, 52207038)。
收稿日期 2023-12-04
改稿日期 2024-03-05
王恒泓 男,博士研究生,主要研究方向为永磁同步电机无传感器控制、人工智能算法等。E-mail: wanghh@seu.edu.cn
徐 炜 男,教授,博士生导师,主要研究方向为新能源汽车电驱系统的建模、设计及控制等。E-mail: weixu@seu.edu.cn(通信作者)
(编辑 崔文静)