摘要 传统的定子变磁通同步电机需要设置额外的励磁绕组,并附加H桥电路以提供直流励磁,这会导致系统结构复杂、转矩密度较低。为此,一种新型的零序电流励磁型电机(ZSCEM)被提出,其将电枢和励磁绕组进行集成,并使用零序电流调节电机的气隙磁场,从而实现调速范围的提升。相比于励磁/电枢电流分别控制的定子变磁通同步电机,其电枢和励磁绕组合二为一,定子槽面积得到充分利用,相电阻接近减半,可有效提升效率和转矩密度。该文分别从驱动拓扑、励磁/电枢电流集成控制技术、驱动拓扑及其控制性能三个方面分析并总结了现有ZSCEM控制领域的研究现状。在现有研究工作基础上,提出了一种使用零序电流作为调磁脉冲以改变电机磁化状态的零序电流调磁型记忆电机(ZSCM-MM)。最后对ZSCEM的驱动拓扑及其控制技术的关键共性问题以及未来发展趋势进行了展望。
关键词:驱动拓扑 混合励磁 电机控制 记忆电机 可变磁通 零序电流调磁
稀土永磁同步电机以其高效率、高功率密度和动态响应快的优点得以快速发展,在航空航天、电动汽车、高端机床等领域获得了广泛应用[1-4]。然而传统永磁同步电机的气隙磁场难以调节,导致其在电动运行时恒功率区较窄、调速范围有限,且在发电运行时存在故障灭磁困难的缺点。同时,稀土永磁价格高昂使得电机成本较高。因此,不用或少用稀土永磁体且兼具气隙磁场调节能力以提升弱磁性能的电机成为了众多行业领域的迫切需求。
为满足上述需求,同时实现无刷化磁场调节,一些学者提出定子变磁通同步电机,该类电机拥有转子结构简单、散热效果好、造价低廉等优点。然而,由于励磁绕组和电枢绕组同时放置于定子槽中,并且需要额外电源或变换器,使得电机整体结构复杂,转矩密度较低。为解决上述问题,一些学者继而提出了零序电流励磁型电机(Zero Sequence Current Excited Machine, ZSCEM)[5-16],通过打开电机的绕组中性点将励磁和电枢绕组功能集成,此时定子中仅有一套绕组,绕组横截面积的增大使得其电阻减小、铜耗降低,电机整体效率得以提高。该类电机通过调节电流中的直流分量,可以灵活地改变气隙磁场,因而具有良好的磁场调节能力。
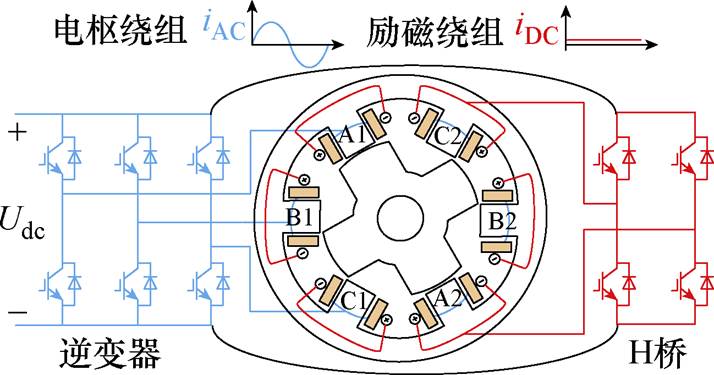
ZSCEM的概念始于英国皇家工程院院士Z. Q. Zhu教授等提出的将励磁和电枢绕组进行集成控制的可变磁通磁阻电机(Variable Flux Reluctance Machine, VFRM)[5-6]。传统VFRM的电枢绕组由直流电源经逆变器进行供电,而励磁绕组经H桥进行供电,其拓扑结构如图1a所示。而集成式VFRM采用单电源向两逆变器同时进行供电,从而向集成绕组通入带直流偏置的正弦电流。该绕组结构提高了定子槽的利用率,降低了相电阻和铜耗,进一步拓宽了电机的运行范围,同时提升了转矩密度,其拓扑结构如图1b所示,图中,Udc为直流电源;iAC、iDC分别为交流和直流分量;iabc为电机三相电流。
随后,国内外众多学者提出了多种结构形式的ZSCEM,其中包括日本学者A. Kohara等提出的电励磁型的电流叠加型变磁通磁阻电机[7-8]、中国矿业大学蒯松岩教授等提出的直流偏置型开关磁阻电 机[9]、华中科技大学的曲荣海教授等提出的混合励磁型游标电机[10-11]等。另外,混合励磁型还包括江苏大学的杜怿教授等提出的分段式定子混合励磁型电机[12]、香港城市大学的刘春华教授等提出的直流偏置型双定子混合励磁式磁通切换电机[13]、香港理工大学牛双霞教授等提出的槽口永磁型游标磁阻电机[14-15]、浙江大学的卢琴芬教授提出的直流偏置型混合励磁式直线电机[16]等,它们均使用零序电流作为励磁,是比较典型的具有ZSCEM概念的电机。
(a)传统VFRM
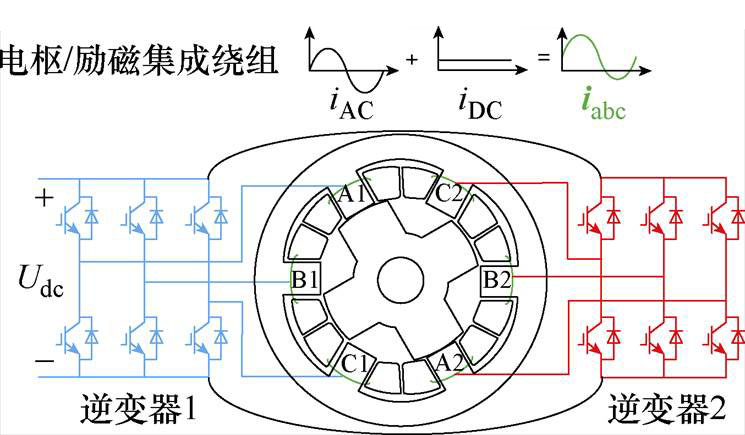
(b)集成式VFRM
图1 传统与集成式VFRM的拓扑结构及控制电路
Fig.1 Topology and control circuit of traditional and integrated VFRM
然而,ZSCEM集成绕组概念也为其驱动拓扑和控制技术带来了新的挑战。由于传统绕组星形联结不存在零序通路,因此需要使用特定驱动拓扑来完成对电机的控制。如何向集成绕组中注入直流偏置的正弦电流,如何应对中性点打开带来的高次谐波问题,这些都需要进一步的深入研究。
本文从三个方面全面总结了当前ZSCEM的研究现状,并对其未来的发展方向做出了展望。首先,对国内外研究的ZSCEM驱动拓扑进行汇总和评价;其次,对广泛应用的驱动拓扑的电压调制策略和控制方法进行总结;再次,将不同种类的驱动拓扑性能进行对比分析,此外,还介绍了本课题组提出的一种新型ZSCEM;最后,对ZSCEM的驱动拓扑和控制技术未来可能的发展方向进行了展望。
电机绕组中性点的存在导致ZSCEM系统中不存在零序通路,为使电机正常运行,须将三相绕组的中性点打开。此时传统的单一逆变器驱动拓扑不再适用,因此存在零序通路的共直流母线型开绕组驱动拓扑[17-26]得到了广泛的研究。共直流母线型开绕组驱动拓扑如图2所示。该驱动拓扑中直流电源同时对两个逆变器供电,电机绕组左右两侧各连接一个逆变器。然而,其只能满足调磁/电枢绕组是同极性,不适用于部分需要调磁/电枢绕组反极性的ZSCEM。共直流母线型双三相电机系统[27-30]将集成绕组分成两个子绕组,其中一个子绕组满足同极性,另一个则满足反极性,很好地解决了上述问题,共直流母线型双三相驱动拓扑如图3所示。
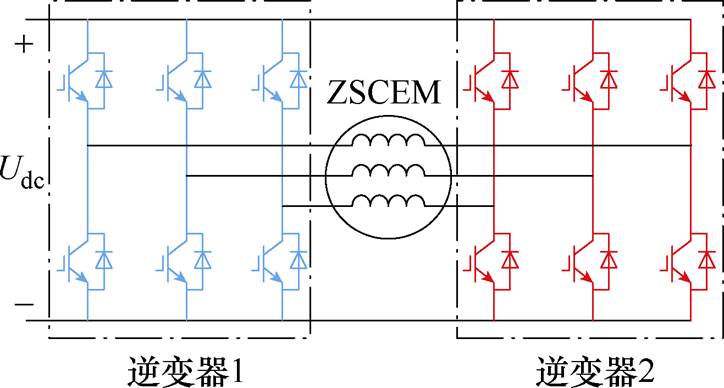
图2 共直流母线型开绕组驱动拓扑
Fig.2 Open-winding drive topology with common DC bus
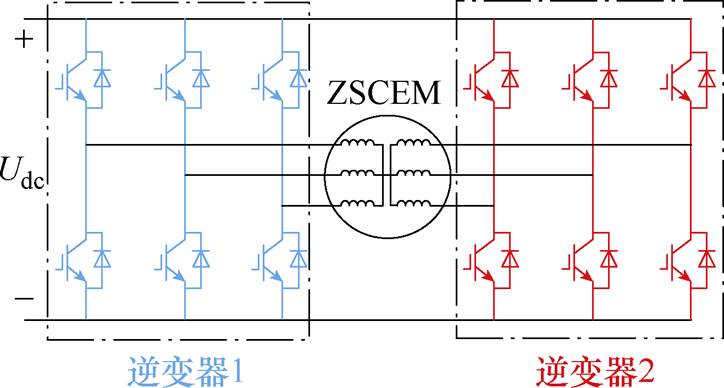
图3 共直流母线型双三相驱动拓扑
Fig.3 Dual three-phase drive topology with common DC bus
为了提升电压灵活配置的能力,同时提供零序通路,共中线型开绕组驱动拓扑[31-34]同样得到了广泛研究。共中线型开绕组驱动拓扑如图4所示。在该驱动拓扑中,直流电源仅对主逆变器供电,而辅逆变器则与一个电容器相连,同时主、辅逆变器两侧直流母线的中性点相连。该拓扑的基本控制方法是让辅逆变器只处理无功功率,主逆变器来提供电机所需要的全部有功功率。
由于上述三种结构使用的器件较多,存在成本较高和占用空间较大等问题,为此,一类少开关器件驱动拓扑被提出,该类驱动拓扑存在成本低、控制系统损耗小、效率高等优势。其中,九开关管驱动拓扑是具有代表性的少开关器件之一[35],九开关管驱动拓扑如图5所示。
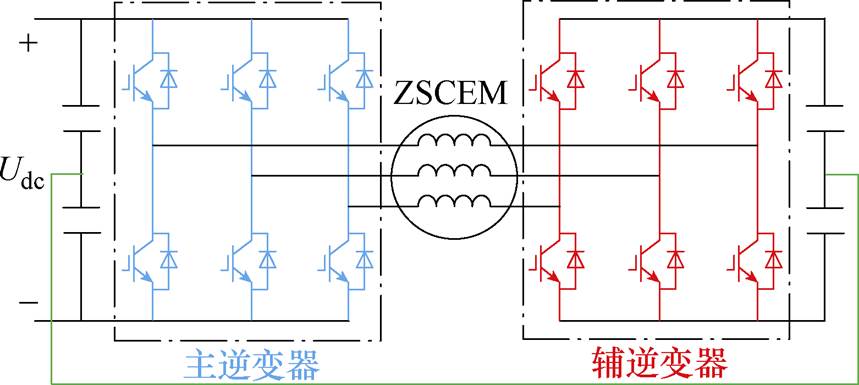
图4 共中线型开绕组驱动拓扑
Fig.4 Open-winding drive topology with common mode connected DC bus
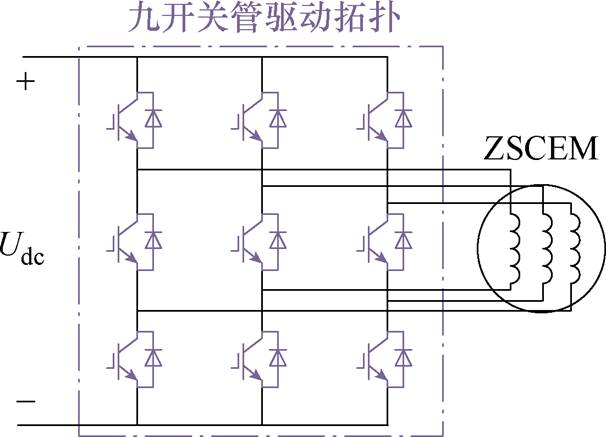
图5 九开关管驱动拓扑
Fig.5 Nine-switch drive topology
该课题还提出了一种四桥臂型串联绕组驱动拓扑[36-41],如图6所示。该驱动拓扑在提供零序通路的同时,能够保证电压利用率仍然保持较高水准。在节约了硬件成本的同时也减少了运行过程中的损耗,具有较强的应用价值[36]。
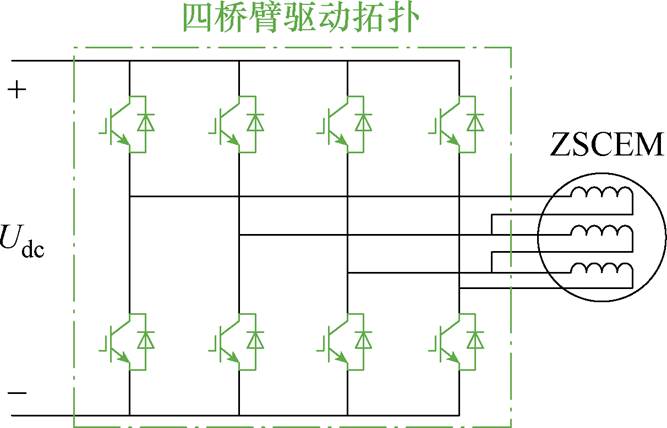
图6 四桥臂型串联绕组驱动拓扑
Fig.6 Series-end winding drive topology with four-leg inverter
上述几种驱动拓扑均具备使零序电流在电机系统内双向流动的能力,但部分ZSCEM只需要单向零序电流作为励磁,为节约成本,须对上述驱动拓扑进行改进。当零序电流幅值小于正弦电流幅值时,电机电流仍是交变电流,这时可以根据电机电流的幅值大小选择器件,从而变为非对称驱动拓扑[42],非对称共直流母线型开绕组驱动拓扑如图7所示,图中,ilarge、ismall分别为较大、较小幅值的电流。非对称驱动拓扑可以减少系统的成本,提升功率密度,同时平衡功率器件的温度。
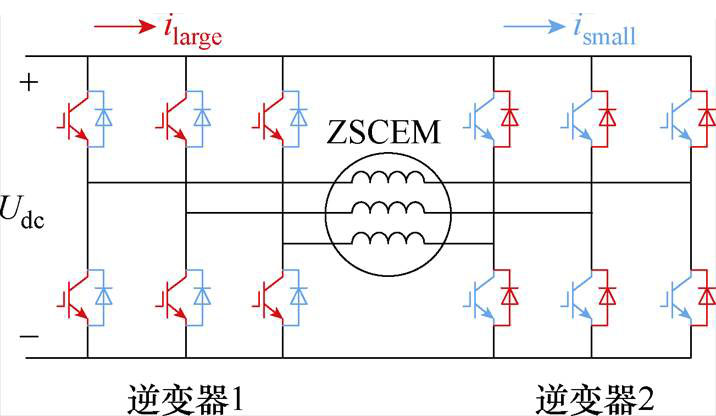
图7 非对称共直流母线型开绕组驱动拓扑
Fig.7 Open-winding drive topology with asymmetric common DC bus type
当零序电流幅值大于正弦电流时,电机电流变为单向电流,这时可以将驱动拓扑中的部分器件替换为二极管,从而变为半控驱动拓扑[43-45],半控共直流母线型开绕组驱动拓扑如图8所示。
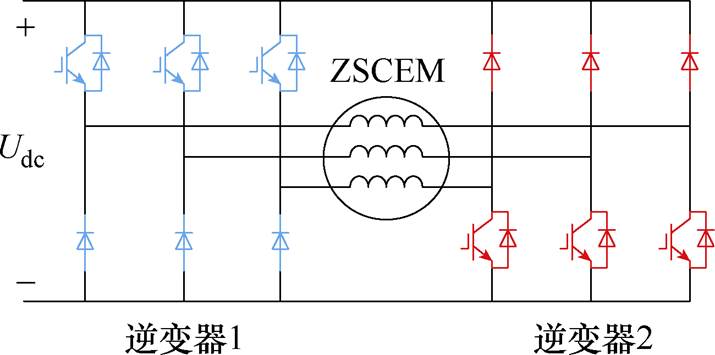
图8 半控共直流母线型开绕组驱动拓扑
Fig.8 Open-winding drive topology with semi-controlled common DC bus type
与全控驱动拓扑相比,这类半控驱动拓扑既减少了电机驱动系统成本,还避免了直流母线的击穿故障。同时,为了减少器件的数量以及系统损耗,三相四桥臂驱动拓扑被提出[46],该拓扑将一非对称桥臂连接到电机中性点处,从而形成了零序通路,但该拓扑也存在电压利用率较低的问题。三相四桥臂驱动拓扑如图9所示。
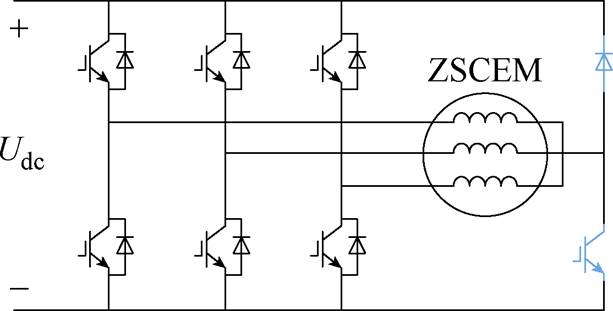
图9 三相四桥臂驱动拓扑
Fig.9 Three-phase four-leg drive topology
2.1.1 开绕组驱动拓扑
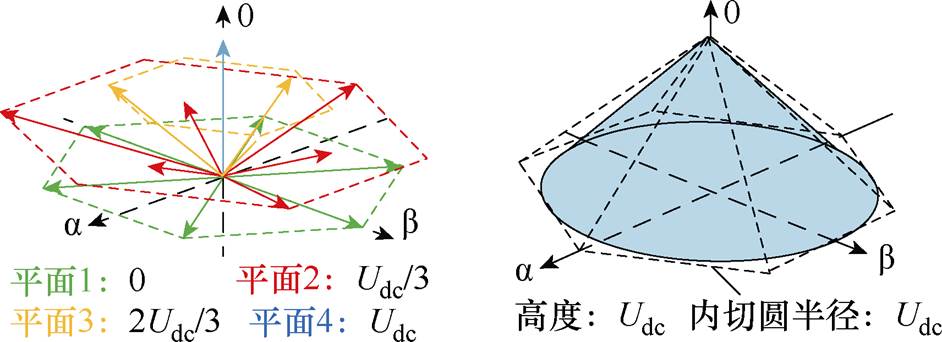
由图2和图3可知,电机绕组两侧各连接一个逆变器,当两个逆变器作为一个整体进行控制时,六相桥臂的开关方式共有64种。64种开关方式对应64个不同的电压矢量,它们在ab0坐标系下的位置如图10a所示,且不同平面对应的零序分量值不同。同时,由于驱动拓扑的调制范围与电压利用率紧密相关,对于ZSCEM调制系统,电压利用率决定了电机的转速范围与带载能力。因此,本文同样给出不同驱动拓扑的最大线性调制区,开绕组驱动拓扑最大线性调制区域如图10b所示。
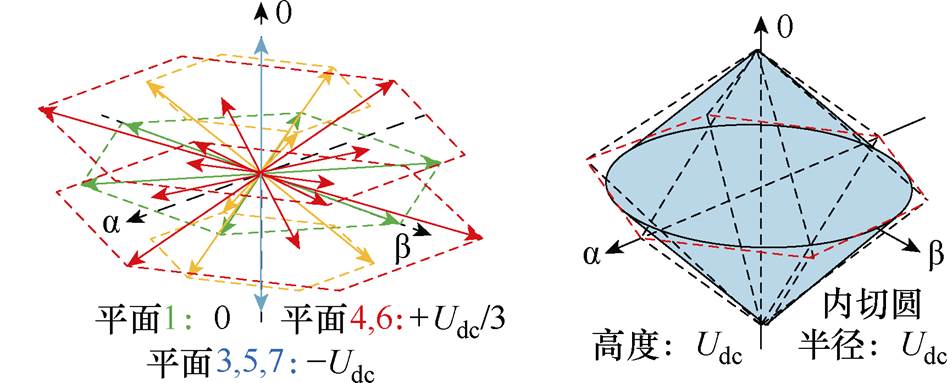
(a)电压矢量分布 (b)线性调制区域
图10 开绕组系统电压矢量分布及线性调制区域
Fig.10 Voltage vector distribution and linear modulation region of open winding machine system
2.1.2 开绕组驱动拓扑电压调制策略研究
1)基于电压矢量120°解耦的零矢量重新分配法
零序电压主要由共模电压和3次谐波反电动势构成,但由于后者不可控,导致无法精准地控制零序电压及零序电流,造成它们的波动。因此,文献[47]提出了一种电压矢量120°解耦的策略,以消除3次谐波反电动势带来的波动,即将目标电压矢量按照120°解耦,并分配给两个逆变器分别合成。文献[5]在此基础上提出了零矢量重新分配法以调制零序电压。采用120°解耦策略时,逆变器1、2在一个周期内产生的有效矢量对应的共模电压平均值为0,所需要的电压完全由零矢量产生。因此,可以通过重新分配两逆变器零矢量的作用时间来进行电压调制,其作用原理如图11所示。但该方法并没有充分利用开绕组系统的电压矢量,参考电压矢量仅用两个平面上的基本矢量进行合成。因此,共模电压的变化将会显著增加,也增加了零序电流的脉动值。
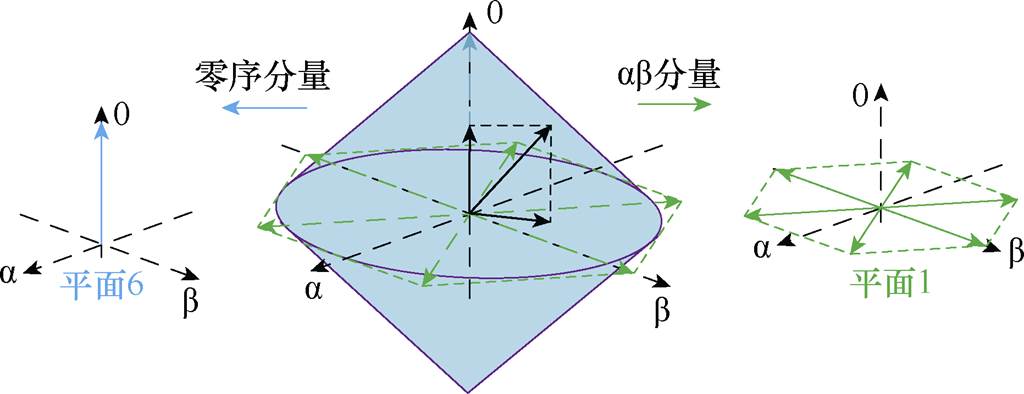
图11 开绕组系统120°解耦电压调制策略
Fig.11 120° decoupling voltage modulation strategy principle for open winding machine system
2)载波相移正弦波脉宽调制(Carrier Based-Sinusoidal Pulse Width Modulation, CBSPWM)
由于SPWM的电压利用率与基于120°解耦的零矢量重新分配的电压调制策略相同,且其技术简单易行,故它同样可以用来调制零序电压。但是传统的SPWM无法解决由谐波电压引起的较大波动的问题,因此可采用载波相移SPWM[48]进行改进,以达到减少零序电流波动的目的。其具体的实现原理为:将三相电压Ua、Ub、Uc进行独立调制,每一相电压调制波分别与相移180°的两个三角形载波相交,其交点分别决定逆变器1、2中对应相开关管的开关时刻,如图12所示,图中,Udq0为dq0轴电压。当采用载波相移的SPWM时,产生的脉冲相电压是单向的,而传统的SPWM是双向的。因此,该技术可以通过减少电压脉动的幅值从而减少电流脉动的幅值,但输出脉动的频率相应地增加了。
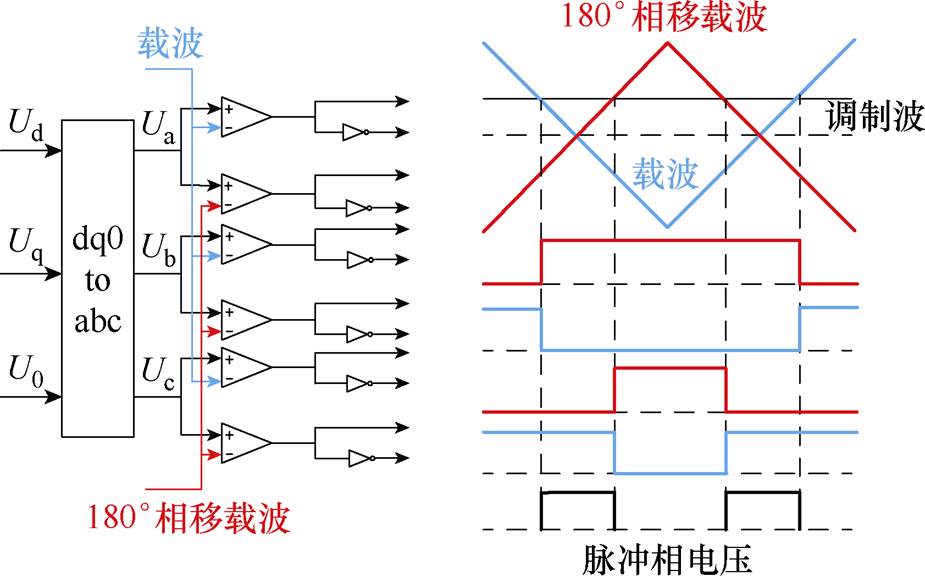
图12 载波相移SPWM调制原理
Fig.12 Modulation principle of carrier phase shift SPWM
文献[42]发现,与120°电压解耦方式相比,在不降低电压利用率的情况下,载波相移SPWM技术在非对称系统中具有更低的脉动幅值,同时其在数字系统中简单易行,且可以清晰地分析一个周期内的电流,因此便于在非对称系统中选择合适的功率器件。文献[19]对两个逆变器合成的电压进行重新分配,一个逆变器合成的电压为该逆变器合成的最大值,另一个逆变器则由相电压和逆变器合成电压最大值共同决定。在计算得到各个桥臂占空比后利用载波相移调制方式以减少电流脉动,则可以在保证电压利用率等指标不变的情况下显著减少逆变器开关损耗。
2.2.1 九开关管驱动拓扑
与开绕组驱动拓扑相比,九开关管驱动拓扑显著减少了使用开关管的数量。该拓扑最初用于两套三相系统中,通过集成开绕组两套逆变器中的上或下桥臂以减少开关管数量。文献[35]首次将该拓扑引入ZSCEM控制系统,但由于零序电流只能自上至下,使得该驱动拓扑应用于ZSCEM时仅能提供单向零序电流。由于每相桥臂的开关方式有三种,因此该拓扑共有27种开关方式,不同开关方式对应的电压矢量空间位置如图13a所示。进一步地,最大线性调制区域如图13b所示,由图可知,虽然该拓扑仅有单相零序分量的调制能力,但其在ab 平面和0轴上的电压分量却可以维持相同水平。
(a)电压矢量分布 (b)线性调制区域
图13 九开关管驱动拓扑电压矢量分布及线性调制区域
Fig.13 Voltage vector distribution and linear modulation region of nine-switch drive topology
2.2.2 九开关管驱动拓扑调制策略研究
由于该驱动拓扑在ab 平面和0轴上均有电压矢量存在,因此该拓扑的电压调制策略与开绕组驱动拓扑类似,均是分别选择在ab 平面和0轴上的电压矢量合成参考电压矢量,九开关管驱动拓扑电压分配策略如图14所示。但九开关驱动拓扑的中间开关管不再是中心对称的开关方式,这使得ab 分量与0轴分量分别调制方法面临开关损耗增加等问题。
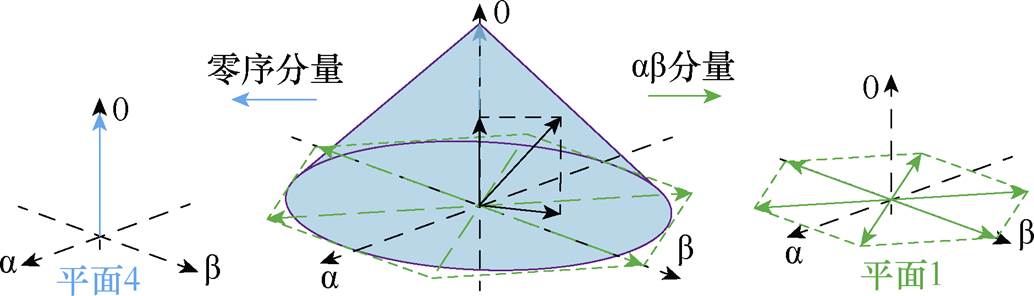
图14 九开关管驱动拓扑电压分配策略
Fig.14 Space vector modulation of nine-switch drive topology
2.3.1 四桥臂串联绕组驱动拓扑
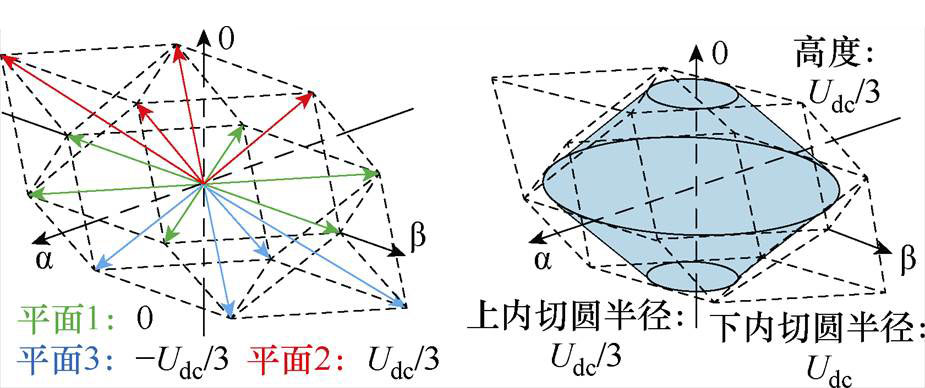
四桥臂型驱动拓扑电机系统的三相绕组呈串联连接,绕组的端点和连接点均与桥臂连接。由于每相桥臂的开关状态有两种,故该拓扑的开关状态共有16种,不同开关状态对应的电压矢量位置如图15a所示,其最大线性调制区域如图15b所示。
2.3.2 四桥臂串联绕组驱动拓扑调制策略研究
1)虚拟电压矢量空间矢量调制(Space Vector Modulation, SVM)策略
由于四桥臂型串联绕组驱动拓扑的电压矢量分布比较复杂,会导致参考电压矢量定位过程困难。为简化该过程,虚拟电压矢量SVM将三个带零序分量的电压矢量进行合成,形成一个在0轴上的虚拟电压矢量,因此参考电压矢量就可以解耦在ab 平面和0轴上,四桥臂驱动拓扑虚拟电压矢量SVM策略如图16所示。但在虚拟电压矢量合成时,三个基本电压矢量在ab 平面上的分量将被抵消,因此电压利用率不可避免地下降。
(a)电压矢量分布 (b)线性调制区域
图15 九开关管驱动拓扑电压矢量分布及线性调制区域
Fig.15 Voltage vector distribution and linear modulation region of nine-switch drive topology
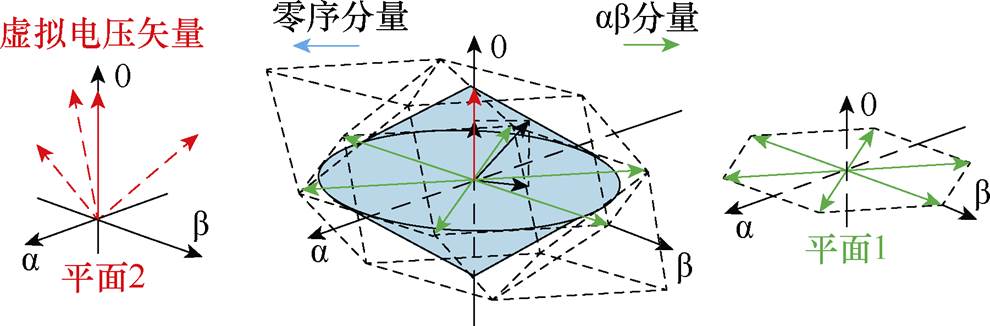
图16 四桥臂驱动拓扑虚拟电压矢量SVM策略
Fig.16 Virtual voltage vector-based SVM strategy for four-leg drive topology
2)三维SVM策略
针对虚拟电压矢量SVM策略电压利用率较低的问题,文献[37]提出了一种三维SVM策略。该策略使用六个平面将三维空间分成24个四面体,并通过六个平面在三维空间中的数学表达式,识别参考电压矢量的空间位置,其原理如图17所示。由于参考电压矢量仅由三个相邻的基本电压矢量合成,因此该策略可以充分发挥四桥臂驱动拓扑的输出能力。
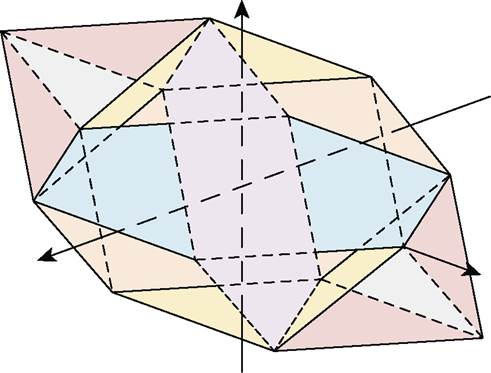
图17 四桥臂驱动拓扑三维SVM调制策略
Fig.17 Three-dimensional SVM strategy for four-leg drive topology
3)载波相移SPWM
四桥臂型SVM技术只适用于三相电机,文献[38]研究了适用于多相电机的基于载波的PWM技术,使得该驱动拓扑结构可以广泛用于多相ZSCEM电机,但该策略计算复杂,并引入了电压注入来实现电压利用率的提升。针对上述问题,文献[39]引入了虚拟轴来代替复杂的计算,在实现通用技术的同时大大减少了计算时间。同时,文献[40]对多相串联绕组驱动拓扑进行分析推导,并发现对于奇偶性不同的桥臂数,绕组的连接次序数目也不相同。同时,串联绕组只需要n+1相桥臂,相比于开绕组需要的2n相,显著减少了桥臂数量,具有较高的实际应用价值。
2.4.1 三相四桥臂驱动拓扑
三相四桥臂驱动拓扑将中性点引出从而建立零序通路,具有良好的零序电流控制能力。但文献[46]将第四桥臂的开关数量减少一半,使该拓扑仅有单向零序通路。此外,由于该拓扑中中性点电位不确定,所以无法应用SVM技术,其最大线性调制区域如图18所示。
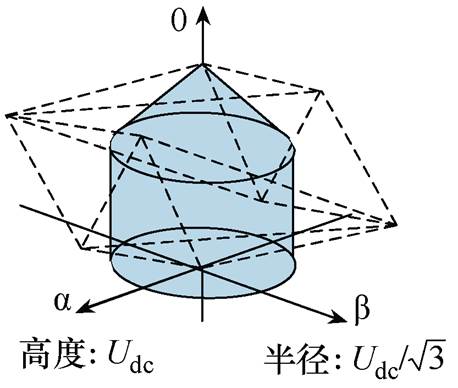
图18 三相四桥臂驱动拓扑线性调制区域
Fig.18 Linear modulation region of three-phase four-leg drive topology
2.4.2 三相四桥臂驱动拓扑调制策略研究
文献[46]针对三相四桥臂驱动拓扑提出了一种CBSPWM策略,该策略与图13的原理一致,均是通过载波与调制波的比对,直接对ab0轴电压进行合成。
VC的基本原理是通过坐标变换实现磁链与转矩的解耦,并通过分别控制dq轴电流来实现对磁链与转矩的控制,但在ZSCEM系统中,还需要增加对零序电流的控制。将abc坐标系中带直流偏置的正弦电流转化至dq0坐标系后,其正弦电流分量转化至dq轴,直流偏置分量转化至0轴。故通过坐标变化后,可以实现对于磁链、转矩和零序电流的解耦控制,具体体现为对d、q轴和0轴电流的控制,ZSCEM矢量控制系统控制框图如图19所示。图中,id、iq、i0分别为d、q、0轴电流,nr和q 分别为电机的转速和位置角。
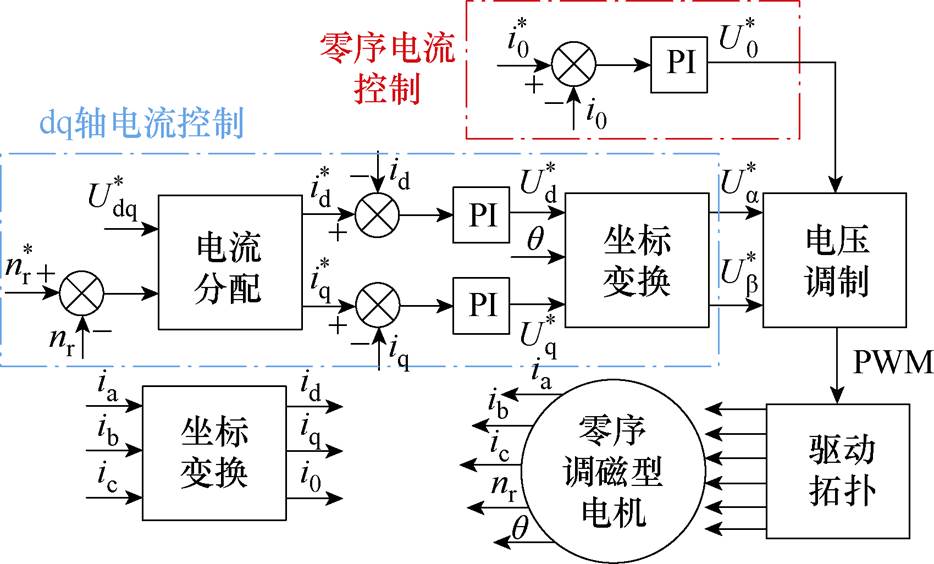
图19 ZSCEM矢量控制系统
Fig.19 Vector control system of ZSCEM
由于dq轴与0轴的控制是独立进行的,增加0轴的控制对dq轴的控制影响较小。但为追求ZSCEM的电磁性能最优,众多学者对如何分配i0和iq的有效值展开了研究。文献[20]认为,当i0与iq的有效值比值为1时,输出转矩最大,但该文献并没有对电机饱和效应进行分析。文献[21]对两种ZSCEM研究发现,在考虑饱和效应的情况下,电机输出转矩最大值对应的i0与iq的有效值之比将受到不同饱和程度的影响,并且二者有效值比值为1.1~1.3时电机可以输出最大转矩。
文献[28]将该思想运用至最大转矩电流比控制中,提出了修正的最大转矩电流比曲线,其不仅考虑了电感的非线性的特征与饱和效应的影响,同时还在控制策略中兼顾了对高次谐波的抑制,但是其电压降落环节忽略了零序电压降落,可能导致其精准性有所下降。文献[22]考虑了零序电压降落的问题,并在电压矢量分配至两个逆变器后进行电压补偿,但其在控制策略中忽略了d、q轴电压降落,并且采用查表法进行电感值的选取,可能会降低控制策略的准确性。文献[29]同样考虑了零序电感的变化,并通过在控制过程中加入虚拟信号注入模块以减少零序电感变化带来的影响。文献[23]考虑了逆变器的非线性可能会对参数识别准确性带来一定影响,因此其建立了非线性电压误差模型以补偿电机的输入电压,参数识别的精准性得以提升。
文献[30]计算了ZSCEM的功率因数,并提出了最大功率因数的控制策略,其可以在降低逆变器容量的同时提升效率。但该策略也会导致电机的转矩输出和效率将有所下降。文献[24]研究了不同线圈距离下的统一矢量转矩控制策略,采用转速/角度外环和电流内环对ZSCEM进行控制,并且考虑了自感和互感值的变化。文献[5]对零序电流采用滞环控制,虽可以加快其响应速度,但其脉动值将不可避免地增加。
在ZSCEM控制系统中,由于增加了零序电流的控制,故DTC变为对磁链、转矩和零序电流的直接控制。根据不同电压矢量对磁链、转矩和零序电流方向和大小的影响,建立以磁链、转矩和零序电流为判断标准的电压矢量选择表[41]。DTC的控制框图如图20所示,图中,ys、Te分别为电机的磁链和转矩,其直接选择电压矢量输出,避免了旋转坐标变换,简化了控制结构。同时,对定子磁链直接进行控制,受参数变化影响较少。直接对转矩进行控制,会带来转矩动态响应较快的优势,但不可避免地存在转矩脉动,影响电机低速性能和调速范围。
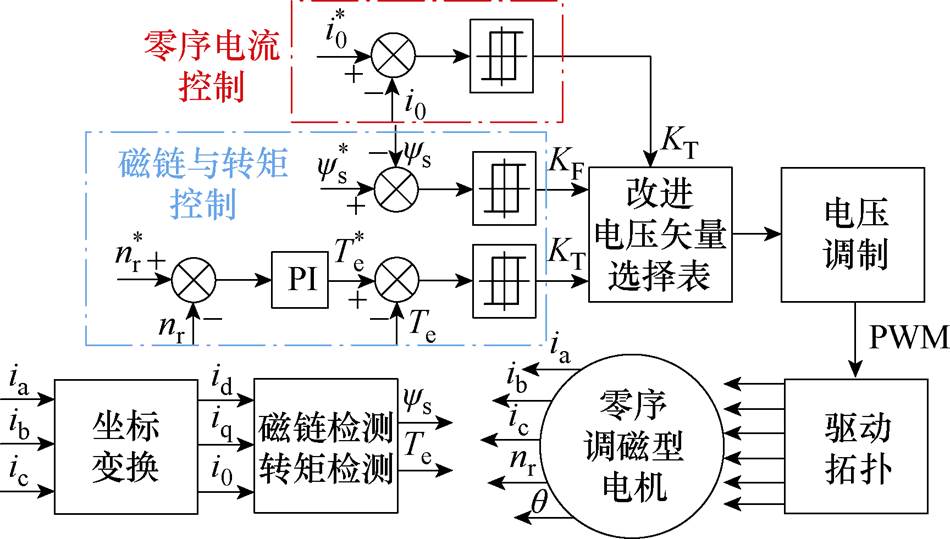
图20 ZSCEM直接转矩控制系统
Fig.20 Direct torque control system of ZSCEM
针对上述问题,文献[25]提出一种新型的DTC策略,其定子磁链和零序电流可以根据参考转矩进行调节。该策略与VC相比计算时间减少,且效率和电流稳定性高于传统的DTC策略。但其采用电压120°解耦的电压分配方式,会使电压利用率有所下降。文献[26]考虑到了电感的非线性和饱和效应,在控制系统中加入了反馈线性化控制器,从而可以获得更好的磁链和转矩的性能,同时在动态运行和低速运行时都有良好的表现。但是其电感值由查表确定,因此在实际运行中的准确性可能会受到影响。且该方法同样采用电压120°解耦的电压分配方式,导致电压利用率降低。
对于ZSCEM系统,零序通路的引入使得电机驱动系统的开关器件冗余性得到了显著增加。相比传统永磁同步电机,ZSCEM的多开关器件特性使得其在容错控制技术方面具有优势。目前主要对ZSCEM断路故障展开了研究,其容错控制技术主要可以分为直接驱动[49-50]以及重构拓扑结构后驱动两种[51-52]。
文献[49]针对开绕组驱动拓扑断相故障,提出了一种抬高直流偏置电流的控制方法。通过将交流电流变为直流电流,使电流不再流过故障桥臂。但该方法改变了q轴和0轴的电流分配,会降低ZSCEM输出转矩的能力。文献[50]针对串联绕组四桥臂驱动拓扑断相故障,提出了一种自适应容错控制方法,可以抑制故障后零序电流和转矩脉动。但该方法中仅有两相绕组工作,因此流过绕组的电流幅值会显著增大,这同样会给电机及其驱动系统带来挑战。因此,故障后直接驱动ZSCEM的容错控制具有易于实施、成本较低的优势,但电机本体和驱动系统的输出能力均会有所下降,且无法良好地利用剩余健康器件。
文献[51]对开绕组驱动拓扑进行了断相故障后重构,使得剩余正常的五相桥臂和全部绕组均可参与驱动,六桥臂断相重构驱动拓扑如图21所示。文献[52]基于该工作提出了一种电压调制策略,使ZSCEM可以在五桥臂驱动拓扑下运行,但该策略的电压矢量选择不充分,导致其无法完全发挥出五桥臂驱动拓扑的输出能力。同时,尽管重构驱动拓扑需要额外的开关器件,增加了驱动系统的成本,但其具有最大化利用电机及驱动系统的输出能力的优势。重构拓扑后驱动的容错控制技术更适用于冗余性较强的驱动系统,例如六桥臂开绕组系统。
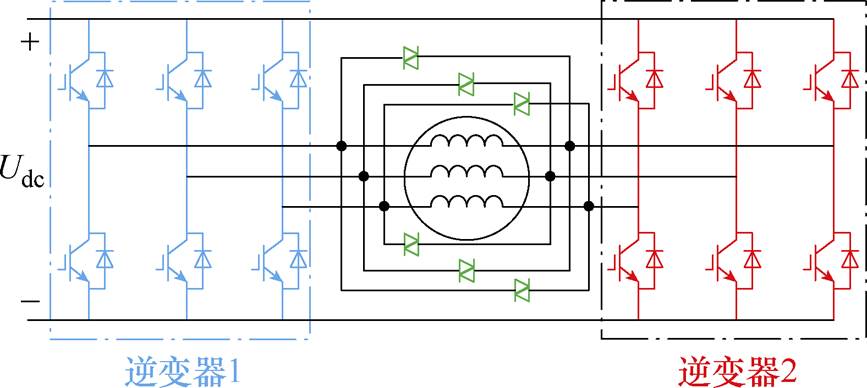
图21 六桥臂断相重构驱动拓扑
Fig.21 The six-bridge arm phase fault reconstruction drive topology
本节总结了三相ZSCEM驱动拓扑的研究现状,并从其基本结构、功率设备、调制能力和控制能力四方面进行了对比,见表1。
由于不同驱动拓扑使用的电流传感器等数量均一致,因此开关管数量会直接决定驱动系统成本以及功率密度。由于开绕组驱动拓扑使用开关管数量最多,因此其成本最高,功率密度最低。相反地,三相四桥臂驱动拓扑成本最低,功率密度最高。
由于九开关管驱动拓扑运行时单相桥臂中必须有两个开关管导通,而其他驱动拓扑均为一个,因此所有开关管的电压压力均为直流母线电压。但由于各驱动拓扑的零序电流通路不同,开关管的电流压力也有所区别。从零序电流通路中可以看出,零序电流仅流过部分器件,对于零序通路上的开关管,其需要承受交流/直流电流,相反,器件仅需要承受交流电流。特别地,中性点的存在使三相四桥臂驱动拓扑中额外的桥臂不承受交流电流,但流过的电流幅值是3倍的零序电流幅值。因此,六桥臂驱动拓扑各开关管的电流应力相同,相较于其他拓扑更有优势。此外,平衡的电流压力还会带来平衡的热压力,不平衡的电流幅值会导致各开关管运行时发热情况有所不同。
表1 不同驱动拓扑性能对比
Tab.1 Performance comparison of different drive topologies

对比项目六桥臂驱动拓扑九开关管驱动拓扑四桥臂驱动拓扑三相四桥臂驱动拓扑 驱动拓扑结构 零序通路 (部分) 驱动拓扑成本高较高较低低 系统功率密度低较低较高高 功率设备数量12987 电压压力UdcUdcUdcUdc 电流压力全部(12): 直流/交流相关上/下(6): 直流/交流相关中间(3): 交流相关左/右(4): 直流/交流相关中间(4): 交流相关左(6): 直流/交流相关右(1): 直流相关 热压力平衡不平衡不平衡不平衡 调制能力调制区域 ab 平面内切圆半径UdcUdc上内切圆半径: Udc/3下内切圆半径: Udc 0轴高度UdcUdcUdc/3Udc 零序极性双极性单极性双极性单极性 控制能力零序电流控制能力零序电流可控 容错控制能力高较高较低低
此外,各驱动拓扑的最大线性调制区域各不相同,而该区域决定了ZSCEM的调速范围和带载能力。开绕组、九开关管驱动拓扑的调制区域是圆锥型,二者在ab 平面电压矢量组成的内切圆半径为Udc,在0轴上的高度为Udc,但前者的零序调制能力为双极性,而后者仅为单极性。四桥臂驱动拓扑的调制区域是圆台型,其上内切圆半径为Udc/3,下内切圆半径为Udc,在0轴上的高度为Udc/3,同时其零序调制能力为双极性。而三相四桥臂驱动拓扑的调制区域是圆锥和圆柱的组合,其内切圆半径仅为 ,在0轴上的高度为Udc,且零序调制能力为单极性。
,在0轴上的高度为Udc,且零序调制能力为单极性。
从控制能力角度出发,所有拓扑均可对零序电流进行有效控制。另外,开关管数量越多,驱动拓扑的冗余性越强,容错控制能力越强。
另外,对各驱动拓扑的不同控制策略的优劣势也进行了归纳总结,见表2。
表2 不同驱动拓扑调制策略对比
Tab.2 Modulation strategy comparison of different drive topologies

对比项目120°解耦SVMCBSPWMCBSVM虚拟电压矢量SVM三维SVMCBPWM 拓扑结构开绕组驱动拓扑开绕组驱动拓扑九开关管驱动拓扑四桥臂驱动拓扑四桥臂驱动拓扑四桥臂驱动拓扑 优势算法简单直观零序电流波动较小算法简单直观算法简单 (虚拟矢量在0轴)高电压利用率通用调制技术 (多相) 弱势计算负担较大输出波动频率较大开关损耗较大低电压利用率算法复杂 (三维定位)算法较复杂
可变磁通记忆电机[53-56]利用铝镍钴永磁体高剩磁、低矫顽力的特性,通过施加充去磁电流脉冲来改变永磁体的磁化水平以实现高效的在线调磁,被认为是一种真正意义上的可变磁通电机。
基于对现阶段ZSCEM设计及其控制技术的分析,本课题组将零序电流调磁[57]的概念引入记忆电机,提出一种零序电流调磁型记忆电机(Zero SequenceCurrent Magnetized Memory Machine, ZSCM-MM),其结构如图22所示。该电机采用定子偏置混合永磁结构,定子上在轭部和槽口同时嵌入切向聚磁式铝镍钴(AlNiCo)磁极和钕铁硼(NdFeB)磁极,AlNiCo磁极负责气隙磁场调控,NdFeB磁极作为主励磁源提升转矩密度,这种设计可实现电枢与永磁磁场的“有效隔离”,提升了电机稳态性能,且电机双凸极结构可进一步提高结构可靠性。
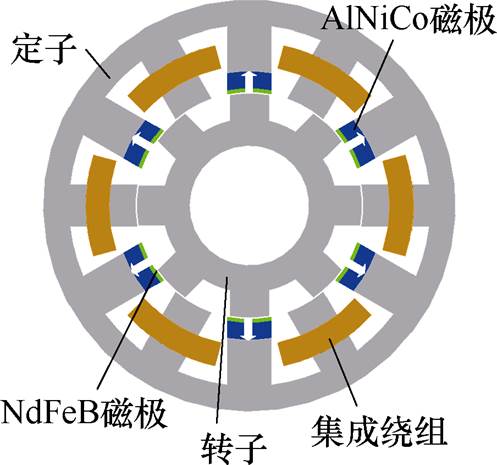
图22 零序电流调磁型记忆电机
Fig.22 The structure of the proposed ZSCM-MM
ZSCM-MM的运行原理为:常规驱动运行时,集成绕组中流过正弦电流,电机磁化状态不变。电机充磁运行时,集成绕组中流过带正向直流偏置的正弦电流,此时零序电流产生的磁场方向与铝镍钴永磁的充磁方向一致。NdFeB磁极的磁场强度将随直流偏置幅值而产生响应变化,在充磁结束后集成绕组仍流过正弦电流,此时新的磁化状态将被“记忆”。电机去磁运行时同理,此时集成绕组中流过带反向直流偏置的正弦电流,充去磁运行时的磁通路径如图23所示。充去磁结束后电机磁通密度云图与磁力线分布如图24所示,可以看出,零序电流对NdFeB磁极的磁场强度调节导致不同磁化状态下电机的气隙磁场强度不同。
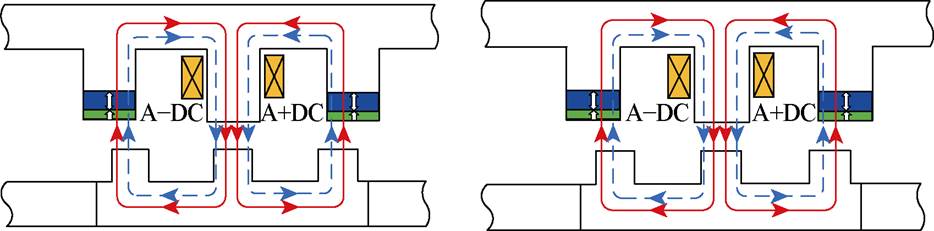
(a)充磁运行 (b)去磁运行
图23 充去磁运行时磁通路径
Fig.23 Flux path during magnetization and demagnetization operation
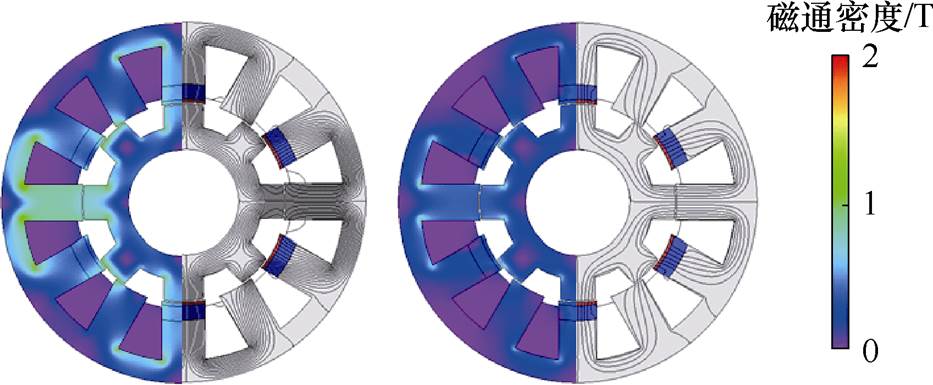
图24 不同磁化状态下的磁通密度云图与磁力线分布
Fig.24 Distribution of magnetic dense clouds and magnetic field lines under different magnetization states
由于ZSCM-MM可变磁通的性质,导致其数学模型需要重新建立。其磁链方程为
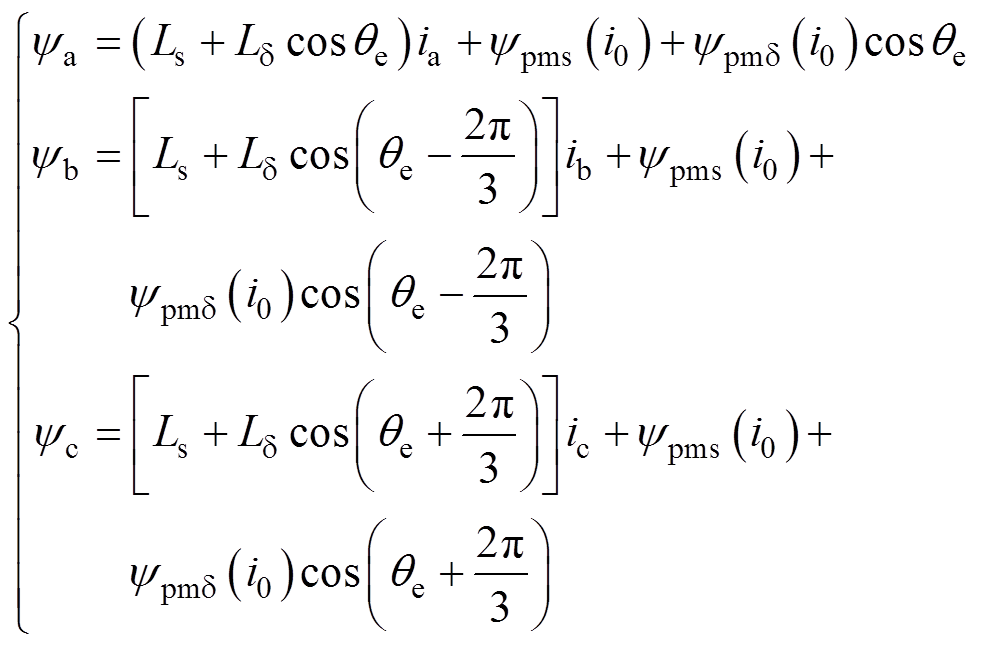 (1)
(1)
式中,yabc为电枢绕组的磁链;ypms为永磁磁链的直流分量;ypmd为永磁磁链的交流分量;iabc为电枢绕组的相电流;i0为零序电流;Ls和Lδ分别为电枢绕组自感的静态和变化分量;qe为ZSCM-MM的电角度。ZSCM-MM的电压方程为
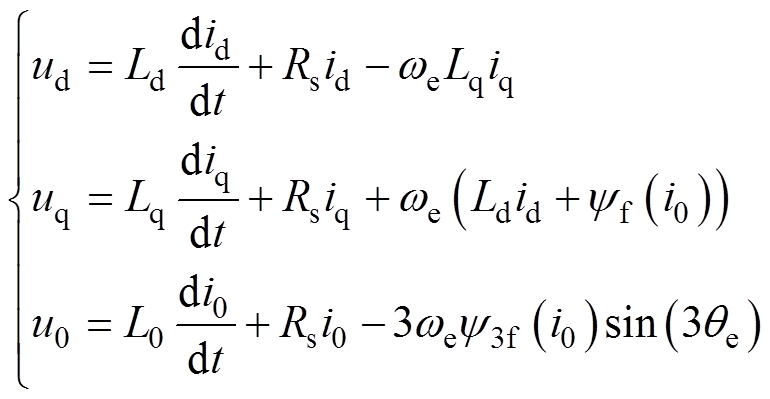 (2)
(2)
式中,Ldq0为dq0轴的电感;udq0为dq0轴的电压;idq为dq轴的电流;Rs为电机的电阻;we为电机的角速度;yf为转子磁链基波;y3f为转子3次谐波磁链。ZSCM-MM的输出转矩Te为
 (3)
(3)
ZSCM-MM的提出解决了传统交流调磁型[58-61]和直流调磁型记忆电机[62-63]的诸多关键问题。相比于交流调磁型,其仅在驱动拓扑上增加少量器件,既提升了电压利用率,又避免了调磁和驱动阶段相互影响的问题。相比于直流调磁型,其电枢和调磁绕组是集成的,仅需要一个直流电源,电压和绕组利用率提升的同时减少了成本。
由ZSCM-MM的运行原理可知,驱动拓扑需要提供双极性零序电流控制能力,以保证ZSCM-MM可以实现有效充去磁,因此不能使用九开关管或三相四桥臂作为驱动拓扑。同时,考虑到ZSCM-MM使用幅值较大的零序电流作为调磁电流,而四桥臂型串联绕组驱动拓扑为每相提供的零序电压仅为开绕组的1/3,因此共直流母线型开绕组更适合用作驱动拓扑。
ZSCM-MM的矢量控制方法与ZSCEM基本一致,均采用一个速度外环、两个电流内环(dq轴电流)及一个单独的电流环(0轴电流),用以控制电机的转速、转矩和磁化状态。区别在于前者要根据运行需求施加调磁脉冲,在控制系统中表现为增加一个磁化状态选择器。它的工作原理为:调磁运行时,选择不同幅值的零序电流参考值,其实际值将会使用PI调节器进行调节,从而改变电机的磁化状态;驱动运行时,零序电流的参考值设为0,以保证其不会影响电机的磁化状态。ZSCM-MM的控制框图如图25所示。
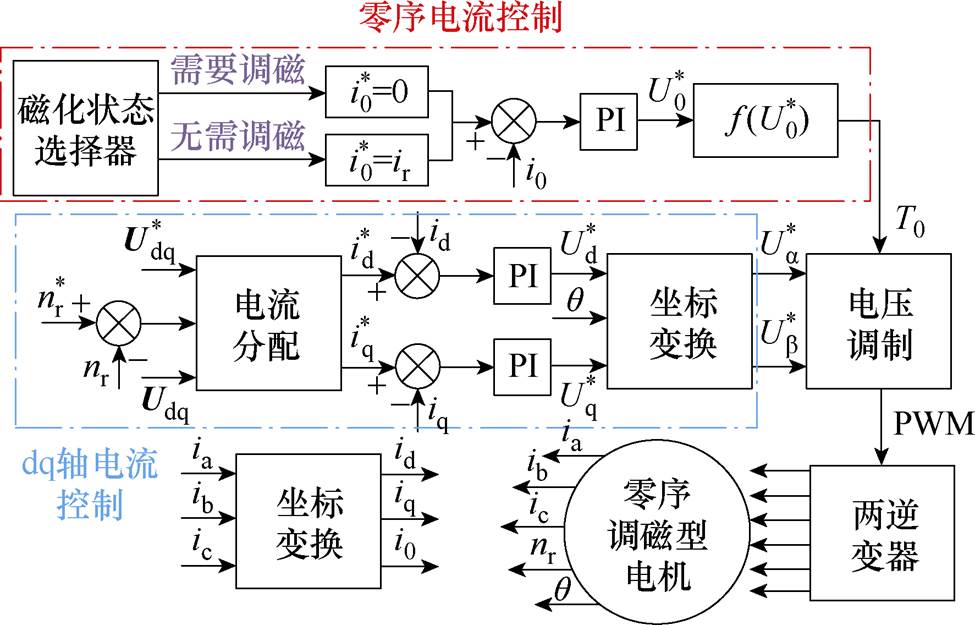
图25 零序电流调磁型记忆电机矢量控制框图系统
Fig.25 Vector control system of the proposed ZSCM-MM
与传统ZSCEM在驱动过程中全程使用零序电流相比,ZSCM-MM仅在调磁时使用,因此逆变器的损耗大大降低。但由于低矫顽力的磁滞模型受到空间磁场强弱、充去磁参数、温度等多方面影响,目前尚未有准确性极高的磁滞模型,因此其在实际应用中的控制精度可能会受到一定影响。
6.1.1 ZSCEM的新型驱动拓扑
虽然现有的ZSCEM驱动拓扑较为丰富,但仍无法兼顾电压利用率、谐波抑制能力、逆变器成本及效率等方面。往往需要特定的零序电压调制方法、零序电流控制方法,或在电机系统中加入具有特定功能的环节以提升电机系统整体性能。虽然可以根据不同的应用场景选择不同的驱动拓扑结构,但仍可以把兼顾电压利用率、谐波抑制能力、逆变器成本和效率等关键性能的新型驱动拓扑作为未来的研究方向。
6.1.2 共中线型开绕组驱动拓扑的控制技术研究
共直流母线型驱动拓扑由单电源向两个逆变器供电,因此母线电压配比是固定的,无法进行多电平的灵活配置。而在共中线型中,直流电源仅与主逆变器相连,辅逆变器与电容器相连,因此可以灵活配置电容电压以实现多电平的效果。两逆变器间的中线不仅提供了零序通路,还抑制了母线间的高频电压脉动,有利于抑制电磁干扰和轴电流[64]。然而,目前共中线型驱动拓扑的控制技术并没有得到广泛关注。如何进行电容电压、中性点电压和零序电流的控制使得电机系统可以具有更高的电压利用率、更小的电流纹波,将会是另一个研究方向。
6.1.3 多相ZSCEM系统的驱动拓扑研究
多相ZSCEM系统的驱动拓扑为开绕组或串联绕组驱动拓扑的延伸。但前者使用开关器件过多,存在成本较高的问题;后者存在各相零序电压较低,导致ZSCEM带载能力较差等问题。因此,研究更适合多相ZSCEM系统的驱动拓扑仍是重要的研究方向。
ZSCEM驱动拓扑,例如共直流母线开绕组、四桥臂串联绕组和三相四桥臂型驱动拓扑,其三维电压矢量分布在不同的零序层面,如图10a、图13a和图18a所示。然而目前的SVM调制策略原理是将参考电压矢量解耦至ab 平面和0轴,从而实现简单直观的电压调制。但该方法仅选择了少部分的电压矢量进行参考电压矢量的合成,因此该种策略无法在单个控制周期内减少共模电压的变化或减少驱动拓扑的开关频率。因此,如何组合不同电压矢量,以提升驱动拓扑效率,减少零序电流纹波同样是未来的研究方向。
6.3.1 ZSCEM系统的高精确度建模方法
零序电压既包括逆变器侧的共模电压,也包括电机侧的高次谐波电压和死区效应产生的电压等。但在建立数学模型的过程中,往往简化了零序电压的构成,其将导致实验中零序电压的脉动。由于零序阻抗较小,因此即使较小的零序电压脉动也会引起较大的零序电流脉动。探寻高精度的数学模型对ZSCEM系统的控制精确性具有重要作用。
6.3.2 ZSCEM系统的谐波抑制技术
高次谐波会导致逆变器损耗增加、效率降低、转矩波动加大等问题,严重损害了电机系统的性能。目前,主要的谐波抑制方法在两个环节中应用,即零序电压调制环节和控制系统环节。第2节提到的120°解耦电压矢量分配策略[5]属于在电压调制环节中抑制3次谐波,但其存在电压利用率较低的问题。在控制系统环节进行谐波抑制主要指对电流调节器进行改进和谐波电流注入[65]。目前常用的改进电流调节器包括矢量比例积分控制器[17]、多谐振控制器[36]和比例积分谐振控制器[46]等,但它们存在带宽有限、稳态误差无法消除等问题。文献[65]通过谐波注入的方法有效抑制了转矩脉动,但电机的效率也受到了一定影响。因此,通过研究适用ZSCEM系统的谐波抑制调制技术仍然是未来研究的重要 方向。
6.3.3 ZSCEM系统的容错控制技术
目前,ZSCEM系统的容错控制技术是建立在非重构驱动拓扑结构上的研究,但这会降低驱动拓扑与电机的输出能力。因此,如何在故障情况下最大化发挥驱动拓扑或电机的输出能力,或减少电机性能损害是未来的研究方向。
6.3.4 ZSCM-MM系统的平滑转矩控制策略
在ZSCM-MM系统中,调磁时零序电流将由零迅速变化至给定值,考虑到其幅值直接影响电机的输出转矩,因此调磁时电机的输出转矩会出现波动,可能导致电机在实际应用中受限。目前,交流调磁型记忆电机的平滑转矩控制策略得到了一定的研 究[66-69],但主要是对调磁电流的轨迹进行设计。考虑到在d轴与0轴进行调磁的特点不同,未来可以在已有策略的基础上,分别对其各相绕组进行充去磁,即将分步充去磁[70]的思想引入该类电机,以获得更适用于它的平滑转矩控制策略。
ZSCEM使用电枢/励磁集成绕组,并通入直流偏置的正弦电流,具有相电阻小、转矩密度高和调速范围宽的优点,未来在电动汽车、高速机床及飞轮储能等领域存在广阔的应用前景。本文从ZSCEM的驱动拓扑、控制方法和现有驱动拓扑控制性能对比三方面出发,分析并总结了现有ZSCEM的研究现状,并对其未来发展趋势进行了展望。主要结论如下:
1)本文对现有的驱动拓扑进行了分析,并对其控制性能进行了多方面的对比,发现不同类型的结构在成本、电压利用率、零序电压调制能力等不同方面分别存在优劣势。同时,相较于共直流母线型拓扑,共中线型具备灵活配置电容电压以实现多电平的效果的能力,且其并未产生增加系统成本或降低电压利用率等负面影响,因此未来应对该结构在ZSCEM系统中的应用展开进一步的研究。
2)本文分别从电机系统、零序电压调制策略、控制技术三方面对使用六/四桥臂型驱动拓扑的ZSCEM进行了分析,并介绍了相关的研究工作。然而,从当前的部分研究中[20-21, 28, 71-73]可以看出,其控制技术将会受到电机本体拓扑的影响,即不同拓扑的同种电机在使用相同的控制策略时,如输出转矩、转矩波动[74]等性能指标也是不同的。因此,研究不同电机本体拓扑下的各个性能指标的差异,并据此设计与之匹配的控制策略将是未来一个重要的研究思路。
3)零序电压的高次谐波分量将会导致零序电流的脉动,其又会导致系统出现损耗增加、转矩脉动大等问题,因此必须对其进行抑制。开绕组永磁同步电机的零序电流抑制技术[74-78]一直是研究的重点,未来可以考虑将其中部分技术与ZSCEM进行结合,以探索更适用于该系统的零序电流脉动抑制技术。
4)本文基于现有研究的分析,提出一种ZSCM-MM,它可根据实际需要,施加零序电流改变磁化状态以实现扩速。为了使该电机更好地应用在实际场合中,应减少调磁时转速、转矩的波动,因此探索具有优良性能的平滑转矩控制策略是未来重要的研究方向。
参考文献
[1] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2001.
[2] 王秀和. 永磁电机[M]. 2版. 北京: 中国电力出版社, 2011.
[3] 黄海林, 李大伟, 曲荣海, 等. 磁齿轮复合永磁电机拓扑及应用综述[J]. 电工技术学报, 2022, 37(6): 1381-1397.
Huang Hailin, Li Dawei, Qu Ronghai, et al. A review of magnetic geared machines: topologies and applications[J]. Transactions of China Electro- technical Society, 2022, 37(6): 1381-1397.
[4] 孙玉华, 赵文祥, 吉敬华, 等. 高转矩性能多相组永磁电机及其关键技术综述[J]. 电工技术学报, 2023, 38(6): 1403-1420.
Sun Yuhua, Zhao Wenxiang, Ji Jinghua, et al. Overview of multi-star multi-phase permanent magnet machines with high torque performance and its key technologies[J]. Transactions of China Electro- technical Society, 2023, 38(6): 1403-1420.
[5] Zhu Z Q, Lee B, Liu Xu. Integrated field and armature current control strategy for variable flux reluctance machine using open winding[C]//2015 Tenth Inter- national Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 2015: 1-7.
[6] Zhu Z Q, Lee B. Integrated field and armature current control for dual three-phase variable flux reluctance machine drives[J]. IEEE Transactions on Energy Conversion, 2017, 32(2): 447-457.
[7] Niguchi N, Hirata K, Kohara A. Characteristics of a wide power band variable flux reluctance motor[C]// 2016 ⅩⅩⅡ International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 2016: 180-185.
[8] Kohara A, Hirata K, Niguchi N. Vibration comparison of current superimposition variable flux machine and switched reluctance machine[C]//2018 ⅩⅢ Inter- national Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 2018: 2337-2342.
[9] Kuai Songyan, Yang Houqing, Li Xuanxi, et al. DC-biased sinusoidal excited switched reluctance motor[J]. IET Electric Power Applications, 2020, 14(7): 1204-1209.
[10] Jia Shaofeng, Qu Ronghai, Li Jian, et al. A stator-PM consequent-pole vernier machine with hybrid excitation and DC-biased sinusoidal current[J]. IEEE Transactions on Magnetics, 2017, 53(6): 1-4.
[11] Jia Shaofeng, Qu Ronghai, Kong Wubin, et al. Hybrid excitation stator PM vernier machines with novel DC-biased sinusoidal armature current[J]. IEEE Transactions on Industry Applications, 2018, 54(2): 1339-1348.
[12] Du Yi, Mao Yi, Xiao Feng, et al. Partitioned stator hybrid excited machine with DC-biased sinusoidal current[J]. IEEE Transactions on Industrial Electro- nics, 2022, 69(1): 236-248.
[13] Yu Jincheng, Liu Chunhua. DC-biased operation of a double-stator hybrid flux switching permanent- magnet machine[J]. IEEE Transactions on Magnetics, 2020, 56(2): 7505106.
[14] Zhao Xing, Niu Shuangxia, Fu Weinong. A new modular relieving-DC-saturation vernier reluctance machine excited by zero-sequence current for electric vehicle[J]. IEEE Transactions on Magnetics, 2019, 55(7): 8104605.
[15] Zhao Xing, Niu Shuangxia, Fu Weinong. A novel vernier reluctance machine excited by slot PMs and zero-sequence current for electric vehicle[J]. IEEE Transactions on Magnetics, 2019, 55(6): 8102405.
[16] Shen Yiming, Lu Qinfen. A novel linear hybrid- excited slot permanent magnet machine with DC- biased sinusoidal current[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-5.
[17] Yu Zhiyue, Gan Chun, Chen Yu, et al. DC-biased sinusoidal current excited switched reluctance motor drives based on flux modulation principle[J]. IEEE Transactions on Power Electronics, 2020, 35(10): 10614-10628.
[18] Chen Zhi, Kong Wubin, Li Zimin, et al. Novel- Harmonic-Current-Controller for DC-biased vernier reluctance machines based on virtual winding[J]. IEEE Transactions on Industrial Electronics, 2023, 70(9): 8788-8799.
[19] Yu Zhiyue, Gan Chun, Ni Kai, et al. A simplified PWM strategy for open-winding flux modulated doubly-salient reluctance motor drives with switching action minimization[J]. IEEE Transactions on Indu- strial Electronics, 2023, 70(3): 2241-2253.
[20] Nakao N, Akatsu K. Vector control specialized for switched reluctance motor drives[C]//2014 Inter- national Conference on Electrical Machines (ICEM), Berlin, Germany, 2014: 943-949.
[21] Jia Shaofeng, Qu Ronghai, Kong Wubin, et al. Flux modulation principles of DC-biased sinusoidal current vernier reluctance machines[J]. IEEE Transactions on Industry Applications, 2018, 54(4): 3187-3196.
[22] Guo Jiaqiang, Liu Xu, Li Shanhu. Flux-weakening control for variable flux reluctance machine excited by zero-sequence current considering zero-sequence resistive voltage drop[J]. IEEE Transactions on Energy Conversion, 2021, 36(1): 272-280.
[23] Guo Jiaqiang, Liu Xu, Lu Kaiyuan, et al. Parameter identification of variable flux reluctance machines excited by zero-sequence current accounting for inverter nonlinearity[J]. Energies, 2022, 15(24): 9287.
[24] Li An, Jiang Dong, Sun Jianbo, et al. Unified vector torque control for reluctance motor with different coil pitch[J]. IEEE Transactions on Industrial Electronics, 2023, 70(6): 5527-5536.
[25] Yu Zixiang, Kong Wubin, Qu Ronghai. Direct torque control strategy for DC-biased vernier reluctance machines capable of zero-sequence current regu- lation[J]. IEEE Transactions on Industrial Electronics, 2021, 68(3): 2024-2033.
[26] Li Zimin, Kong Wubin, Qu Ronghai, et al. Feedback linearization direct torque control with zero-sequence current regulation for DC-biased VRM drives[J]. IEEE Transactions on Industrial Electronics, 2023, 70(11): 10881-10890.
[27] Yu Zhiyue, Gao Huida, Chang Liang, et al. MTPA control strategy for six-phase DC-biased hybrid excitation vernier reluctance machines[C]//2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 2019: 3807-3812.
[28] Yu Zixiang, Li Dawei, Kong Wubin, et al. New optimal current control strategy for six-phase DC- biased vernier reluctance machines considering distorted EMF[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10633-10645.
[29] Liu Guohai, Chen Zhiyuan, Xu Liang, et al. MTPA control for DC-biased hybrid excitation machine using MTPA control law and virtual signal injection[J]. IEEE Transactions on Transportation Electrification, 2024, 10(1): 1571-1582.
[30] Yu Zixiang, Kong Wubin, Li Dawei, et al. Power factor analysis and maximum power factor control strategy for six-phase DC-biased vernier reluctance machines[J]. IEEE Transactions on Industry Appli- cations, 2019, 55(5): 4643-4652.
[31] 柯伟煌, 孙丹, 马志豪, 等. 考虑功率分配的混合供电型开绕组永磁同步电机过调制算法[J]. 电工技术学报, 2023, 38(12): 3176-3187.
Ke Weihuang, Sun Dan, Ma Zhihao, et al. An over- modulation scheme considering power distribution for hybrid-inverter driven open-winding permanent magnet synchronous motor system[J]. Transactions of China Electrotechnical Society, 2023, 38(12): 3176- 3187.
[32] 王顺, 杨淑英, 李一, 等. 共中线开绕组拓扑三维空间矢量脉宽调制策略研究[J]. 中国电机工程学报, 2023, 43(3): 1163-1176.
Wang Shun, Yang Shuying, Li Yi, et al. Study on three-dimensional space-vector pulse-width modu- lation strategy used for open-end winding topology with common mode connected DC buses[J]. Pro- ceedings of the CSEE, 2023, 43(3): 1163-1176.
[33] 李一, 王付胜, 杨淑英, 等. 基于浮动桥共中线开绕组拓扑的永磁同步电机矢量控制策略研究[J]. 中国电机工程学报, 2022, 42(13): 4942-4954.
Li Yi, Wang Fusheng, Yang Shuying, et al. Research on vector control strategy of open-end permanent magnet synchronous motor drive based on common mode connected DC buses with a floating bridge[J]. Proceedings of the CSEE, 2022, 42(13): 4942-4954.
[34] 杨淑英, 胡晓海, 符焕, 等. 基于共中线拓扑的开绕组异步电机控制策略研究[J]. 中国电机工程学报, 2020, 40(11): 3681-3690.
Yang Shuying, Hu Xiaohai, Fu Huan, et al. Research on control strategy of dual inverter open-end winding induction motor drive with common mode connected DC buses[J]. Proceedings of the CSEE, 2020, 40(11): 3681-3690.
[35] Yu Zhiyue, Gan Chun, Ni Kai, et al. Optimized nine-switch converter-fed flux-modulated doubly- salient reluctance motor drive with integrated ZSC regulation ability considering efficiency improve- ment[J]. IEEE Transactions on Transportation Elec- trification, 2024, 10.1109.
[36] Li An, Jiang Dong, Kong Wubin, et al. Four-leg converter for reluctance machine with DC-biased sinusoidal winding current[J]. IEEE Transactions on Power Electronics, 2019, 34(5): 4569-4580.
[37] Dong Zhiping, Liu Chunhua. Three-dimension space vector modulation for three-phase series-end winding voltage-source inverters[J]. IEEE Transactions on Industrial Electronics, 2024, 71(1): 82-92.
[38] Li An, Jiang Dong, Liu Zicheng, et al. Generalized PWM method for series-end winding motor drive[J]. IEEE Transactions on Power Electronics, 2021, 36(4): 4452-4462.
[39] Liu Senyi, Song Zaixin, Dong Zhiping, et al. Generic carrier-based PWM solution for series-end winding PMSM traction system with adaptative over- modulation scheme[J]. IEEE Transactions on Trans- portation Electrification, 2023, 9(1): 712-726.
[40] Li An, Jiang Dong, Liu Zicheng, et al. Unified analysis of winding connection sequence in series-end winding topology[J]. IEEE Transactions on Industry Applications, 2021, 57(1): 516-527.
[41] Yang Hui, Yi Yuming, Liu Xing. Direct torque control for zero-sequence current magnetized memory machine system with series-end winding[C]//IECON 2023-49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, Singapore, 2023: 1-6.
[42] Li An, Gao Zihan, Jiang Dong, et al. Drive system with asymmetrical power electronics devices for novel reluctance machines with DC-biased sinusoidal current[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2019, 7(4): 2303-2313.
[43] Kong Wubin, Jiang Dong, Qu Ronghai, et al. Drive for DC-biased sinusoidal current vernier reluctance motors with reduced power electronics devices[C]// 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 2017: 1-6.
[44] Gan Chun, Meng Fanyu, Yu Zhiyue, et al. Online calibration of sensorless position estimation for switched reluctance motors with parametric uncer- tainties[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12307-12320.
[45] Yang Jichang, Jiang Dong, Sun Hongbo, et al. Series-winding topology converter for active mag- netic bearing drive[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11772-11782.
[46] Li An, Jiang Dong, Gao Zihan, et al. Three-phase four-leg drive for DC-biased sinusoidal current vernier reluctance machine[J]. IEEE Transactions on Industry Applications, 2019, 55(3): 2758-2769.
[47] Baiju M R, Mohapatra K K, Kanchan R S, et al. A dual two-level inverter scheme with common mode voltage elimination for an induction motor drive[J]. IEEE Transactions on Power Electronics, 2004, 19(3): 794-805.
[48] Liang Yiqiao, Nwankpa C O. A new type of STATCOM based on cascading voltage-source inverters with phase-shifted unipolar SPWM[J]. IEEE Transactions on Industry Applications, 1999, 35(5): 1118-1123.
[49] Yu Zixiang, Kong Wubin, Jiang Dong, et al. Fault- tolerant control strategy of the open-winding inverter for DC-biased vernier reluctance machines[J]. IEEE Transactions on Power Electronics, 2019, 34(2): 1658-1671.
[50] Sun Xiangwen, Liu Zicheng, Li An, et al. Self- adaptive fault-tolerant control of three-phase series- end winding motor drive[J]. IEEE Transactions on Power Electronics, 2022, 37(9): 10939-10950.
[51] Zuo Yuefei, Zhu Xiaoyong, Si Xiang, et al. Fault- tolerant control for multiple open-leg faults in open- end winding permanent magnet synchronous motor system based on winding reconnection[J]. IEEE Transactions on Power Electronics, 2021, 36(5): 6068-6078.
[52] Dong Zhiping, Zhao Hang, Huang Rundong, et al. A virtual voltage vector-based space vector modulation scheme for three-phase open-winding motor drive with five-leg converter[C]//2022 IEEE Energy Con- version Congress and Exposition (ECCE), Detroit, MI, USA, 2022: 1-6.
[53] Ostovic V. Memory motors[J]. IEEE Industry Appli- cations Magazine, 2003, 9(1): 52-61.
[54] 阳辉. 新型磁通切换型可变磁通记忆电机研究[D]. 南京: 东南大学, 2017.
Yang Hui. Research on a new flux switching variable flux memory motor[D]. Nanjing: Southeast University, 2017.
[55] 林鹤云, 阳辉, 黄允凯, 等. 记忆电机的研究综述及最新进展[J]. 中国电机工程学报, 2013, 33(33): 57-67.
Lin Heyun, Yang Hui, Huang Yunkai, et al. Overview and recent developments of memory machines[J]. Proceedings of the CSEE, 2013, 33(33): 57-67.
[56] 林明耀, 杨公德, 李念. 混合永磁记忆电机系统及其关键技术综述[J]. 中国电机工程学报, 2018, 38(4): 1187-1202.
Lin Mingyao, Yang Gongde, Li Nian. Overview of hybrid permanent magnet memory machine systems and their key technologies[J]. Proceedings of the CSEE, 2018, 38(4): 1187-1202.
[57] Qin Ling, Yang Hui, Fang Shuhua, et al. Design and investigation of a hybrid stator pole memory machine with DC bias magnetization capability[J]. IEEE Transactions on Applied Superconductivity, 2021, 31(8): 5205005.
[58] 阳辉, 刘兴, 吕舒康, 等. 变磁通记忆电机非线性模型与调磁电流脉冲轨迹优化研究[J]. 电工技术学报, 2023, 38(19): 5128-5140.
Yang Hui, Liu Xing, Lü Shukang, et al. Research on nonlinear mathematical model and improvement of re-/de-magnetization current pulse trajectories for variable flux memory machine[J]. Transactions of China Electrotechnical Society, 2023, 38(19): 5128- 5140.
[59] Yang Hui, Zheng Hao, Lin Heyun, et al. Investigation of hybrid-magnet-circuit variable flux memory machines with different hybrid magnet configu- rations[J]. IEEE Transactions on Industry Appli- cations, 2021, 57(1): 340-351.
[60] Yang Hui, Lin Heyun, Zhu Z Q, et al. A variable-flux hybrid-PM switched-flux memory machine for EV/ HEV applications[J]. IEEE Transactions on Industry Applications, 2016, 52(3): 2203-2214.
[61] Liu Wei, Yang Hui, Lin Heyun, et al. A novel asymmetric-PM hybrid-magnetic-circuit variable flux memory machine for traction applications[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4911-4921.
[62] Yu Chuang, Chau K T. Design, analysis, and control of DC-excited memory motors[J]. IEEE Transactions on Energy Conversion, 2011, 26(2): 479-489.
[63] Yu Chuang, Chau K T. Dual-mode operation of DC-excited memory motors under flux regulation[J]. IEEE Transactions on Industry Applications, 2011, 47(5): 2031-2041.
[64] Lee Y, Ha J I. Power enhancement of dual inverter for open-end permanent magnet synchronous motor[C]// 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 2013: 1545-1551.
[65] Kuai Songyan, Zhang He, Xia Xinxiang, et al. Unipolar sinusoidal excited switched reluctance motor control based on voltage space vector[J]. IET Electric Power Applications, 2019, 13(5): 670-675.
[66] Yuuki K, Sakai K, Mochikawa H. Variable-flux motor drive system: U.S. Patent, 8179068[P]. 2012-05-15.
[67] Yu C Y, Fukushige T, Limsuwan N, et al. Variable- flux machine torque estimation and pulsating torque mitigation during magnetization state manipulation[J]. IEEE Transactions on Industry Applications, 2014, 50(5): 3414-3422.
[68] Zhong Yuxiang, Lin Heyun, Wang Jiyao, et al. Speed fluctuation mitigation control for variable flux memory machine during magnetization state manipu- lations[J]. IEEE Transactions on Industrial Elec- tronics, 2023, 70(1): 222-232.
[69] Zhong Yuxiang, Lin Heyun, Wang Jiyao, et al. Q-axis current reverse control of variable flux memory machines with high salient ratio during magnetization process for speed fluctuation reduction[J]. IEEE Transactions on Industrial Electronics, 2024, 71(1): 226-236.
[70] Yang Hui, Lü Shukang, Lin Heyun, et al. Stepwise magnetization control strategy for DC-magnetized memory machine[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4273-4285.
[71] Huang L R, Feng J H, Guo S Y, et al. Analysis of torque production in variable flux reluctance machines[J]. IEEE Transactions on Energy Con- version, 2017, 32(4): 1297-1308.
[72] Huang Liren, Zhu Z Q, Feng Jianghua, et al. Analysis of stator/rotor pole combinations in variable flux reluctance machines using magnetic gearing effect[J]. IEEE Transactions on Industry Applications, 2019, 55(2): 1495-1504.
[73] Feng Jianghua, Huang Liren, Zhu Z Q, et al. Torque density enhancement of 6/4 variable flux reluctance machine with second-harmonic current injection[J]. IEEE Transactions on Energy Conversion, 2019, 34(2): 1135-1145.
[74] Zhang Xiaoguang, Wang Keqin. Current prediction based zero sequence current suppression strategy for the semicontrolled open-winding PMSM generation system with a common DC bus[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6066-6076.
[75] Hu Wei, Nian Heng, Zheng Taiying. Torque ripple suppression method with reduced switching frequency for open-winding PMSM drives with common DC bus[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 674-684.
[76] Yuan Xin, Zhang Shuo, Zhang Chengning, et al. Improved finite-state model predictive current control with zero-sequence current suppression for OEW- SPMSM drives[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 4996-5006.
[77] An Quntao, Liu Jin, Peng Zhuang, et al. Dual-space vector control of open-end winding permanent magnet synchronous motor drive fed by dual inverter[J]. IEEE Transactions on Power Electronics, 2016, 31(12): 8329-8342.
[78] 孙丹, 赵琛, 柯伟煌, 等. 基于重构电压矢量的共直流母线型开绕组永磁同步电机改进直接转矩控制[J]. 电工技术学报, 2022, 37(7): 1644-1653.
Sun Dan, Zhao Chen, Ke Weihuang, et al. Recon- structed voltage vector based improved direct torque control strategy for open-winding permanent magnet synchronous motor with common DC bus[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(7): 1644-1653.
Abstract A type of zero-sequence current excited machine (ZSCEM) has been proposed recently, in which the functions of excitation/armature winding are integrated. Correspondingly, the DC-biased sinusoidal current is injected into the integrated winding. The DC-biased component is used as an excitation source, and the sinusoidal component is used to drive the machine. The phase resistance and copper consumption are reduced while the overall efficiency is improved since the cross-sectional area of the winding is increased. At the same time, the excellent capability of magnetic field regulation is obtained by regulating the DC-biased component in the phase current. This paper overviews several key issues of the ZSCEM and prospects for its development directions.
Firstly, the drive topologies of ZSCEM are summarized, which mainly consist of open-winding/dual three-phase drive topology with common DC bus, open-winding drive topology with common mode connected DC bus, nine-switch drive topology, series-end winding drive topology, and three-phase four-leg drive topology. Besides, since the DC-biased sinusoidal current is injected into ZSCEM, the amplitude of positive and negative currents is different. Therefore, a series of asymmetry drive topologies are proposed and presented to save costs and balance the heat pressure.
Secondly, the modulation strategies for the above drive topologies are mainly summarized, including different space vector modulation (SVM) strategy and sinusoidal pulse width modulation (SPWM) schemes. Moreover, the basic voltage vector distribution and linear modulation region are carried out for each drive topology of ZSCEM. Therefore, it can be easily seen the zero-sequence modulation region from three-dimension space.
Thirdly, the control methods, such as vector control, direct torque control, and fault-tolerant control, are presented. The introduction of zero-sequence current can add one degree of freedom to control technologies. Therefore, the zero-sequence current control loop should be added to the vector control strategy, and a new look-up table with a zero-sequence component should be revised in direct torque control. Furthermore, since the drive topology of ZSCEM provides a zero-sequence loop, the number of power switches is increased, which brings excellent fault tolerance to the ZSCEM drive topology. The existing fault-tolerant control methods (directly driving in post-fault operation and driving after drive topology reconstitution) are also carried out.
Then, the above drive topologies and their basic performances are compared regarding basic constructure, modulation ability, and control ability. Moreover, several modulation strategies are carried out. Different drive topologies have different advantages and disadvantages, which can be selected according to actual situation requirements.
Furthermore, the concept of integrated winding is extended to the memory machine. Therefore, this paper proposes a new type of ZSCEM called zero-sequence current magnetized memory machine (ZSCM-MM). The principle of its operation is introduced in detail, and the regulation method for the magnetization state of ZSCE-MM is revealed. During the normal drive operation, the zero-sequence current should be suppressed to zero, while in the magnetization operation, the zero-sequence current should be controlled to the reference value. Finally, further research and application directions are summarized, providing references for in-depth research of the ZSCEM.
keywords:Drive topology, hybrid-excited, machine control, memory machine, variable flux, zero-sequence current magnetization
DOI: 10.19595/j.cnki.1000-6753.tces.231679
中图分类号:TM301
国家自然科学基金资助项目(52037002, 52077033)。
收稿日期 2023-10-12
改稿日期 2024-04-26
阳 辉 男,1988年生,副教授,博士生导师,研究方向为电动汽车永磁电机系统、机器人伺服系统等。E-mail: huiyang@seu.edu.cn(通信作者)
伊禹名 男,2000年生,硕士研究生,研究方向为零序励磁型电机调制技术等。E-mail: 220222774@seu.edu.cn
(编辑 崔文静)