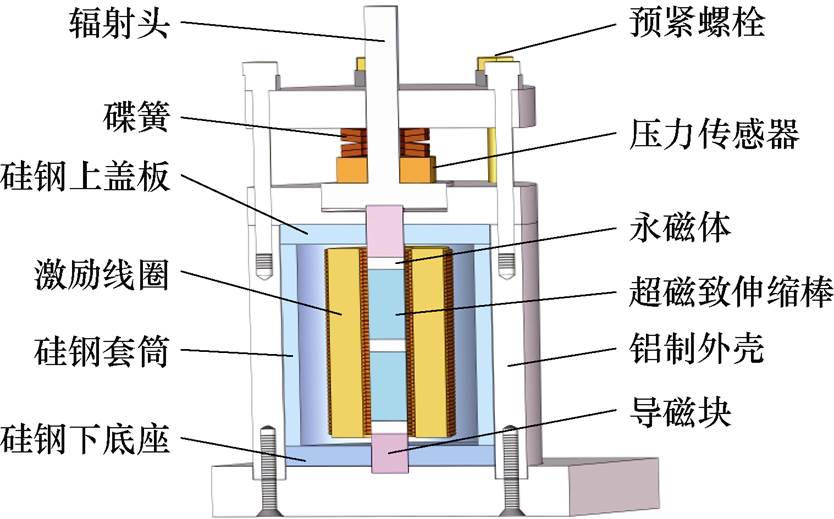
图1 超磁致伸缩换能器结构
Fig.1 Structural diagram of giant magnetostrictive transducer
摘要 超磁致伸缩换能器工作性能受到电-磁-机多场耦合的影响,常利用多场模型分析其非线性输出特性,而能否准确获取其多场耦合参数决定了模型的准确性,是换能器设计和优化的关键。鉴于换能器多场模型具有参数多、耦合强、参数辨识难等特点。该文提出基于改进人工鱼群和布谷鸟混合的超磁致伸缩换能器多场模型参数辨识方法。首先,考虑切割棒材涡流效应的影响,建立超磁致伸缩换能器电-磁-机多场耦合的综合电路模型,来实现超磁致伸缩换能器输出行为的模拟;其次,针对模型参数维度多、耦合强的问题,提出了改进的人工鱼群和布谷鸟混合算法(AFSA-eCS),该方法引入精英个体反向学习策略、动态步长和动态发现概率以强化局部精细化搜索能力;最后,基于实验平台验证了综合电路模型和AFSA-eCS的有效性。结果表明:AFSA-eCS相较于单一算法与遗传退火混合算法(GA-SA)收敛快、参数辨识精度高,基于所提算法和模型能够快速有效分析换能器不同工况下的输出特性。
关键词:超磁致伸缩换能器 参数辨识 综合电路模型 混合算法
超磁致伸缩换能器以超磁致伸缩材料(Giant Magnetostrictive Material, GMM)为核心激励单元,实现电-磁-机能量高效变换,其具有响应速度快、输出功率大、磁机耦合系数高等特点,在声呐系统、水下远距离探测、精密控制和无伤探损等领域有广泛应用[1-3]。
在交流磁场激励下,GMM棒产生的磁致伸缩效应会驱动换能器产生周期性振动,该过程涉及电-磁-机多场能量非线性耦合,尤其是GMM棒的高电导率导致涡流显著,影响能量转换效率,因而工程应用中多采用棒材切割来减少涡流[4-6]。现有研究更多从磁路结构的角度考虑涡流效应,学者Liu Huifang等建立了考虑趋肤效应的GMM涡流损耗模型[7],相比在动态磁滞模型中计算涡流的方式[8]更加精确,但该基于磁路结构的涡流效应分析模型并未考虑换能器整体磁-机换能过程。因此,构建考虑切割棒材涡流效应的多场耦合模型是换能器设计和优化的前提,其中GMM磁化是磁-机场耦合过程的重要环节,而Jiles-Atherton(JA)模型因其参数较少且物理意义明确,并且能够考虑到GMM中磁场和应力的双向耦合影响[9],是常用来描述材料磁化过程的模型。因此,本文从计算GMM棒切割等效涡流因子的角度出发,基于JA模型和结构动力学方程构建超磁致伸缩换能器多场耦合模型,以期有效描述换能器复杂的输出特性。
然而,换能器多场模型中参数较多,且具有较强的耦合性[10],准确获取磁-机耦合参数难度大。现有思路主要包括采用人工智能算法对模型参数进行分步辨识和整体辨识。其中前者通常是先辨识磁滞模型参数再辨识机械参数,但由于两步辨识过程独立,容易导致换能器参数辨识效果较差[11];后者则将换能器中的待辨识参数同步辨识[12-13],尽管弥补了分步辨识方法独立辨识的不足,但却受限于所使用算法的寻优能力。因此,尽管人工智能算法的应用提升了辨识性能,但常用的单一辨识算法,如粒子群优化(Particle Swarm Optimization, PSO)算法、退火算法(Simulated Annealing, SA)、珊瑚礁算法[14-16]等存在计算效率低和易陷入局部最优的问题,尤其在不同工况下换能器磁-机耦合参数关系复杂[17-18]。
与此同时,近年来混合算法因其较高的寻优精度和较少的收敛次数在硅钢片磁特性模拟等领域有较广泛应用。赵志刚等将鱼群算法(Fish Swarm Algorithm, FSA)和粒子群算法引入基于JA模型的变压器铁心磁滞模型进行参数辨识[19],并验证混合算法较单一算法具有收敛快、精度高的优点;刘任等将退火算法和L-M算法混合辨识JA模型参数[20],实现对硅钢片磁滞回线的模拟,验证了随机性算法和确定性算法结合的有效性;Deng Jia提出将一种将遗传算法(Genetic Algorithm, GA)和退火算法(SA)结合的混合算法[21],并应用于磁致伸缩致动器非线性位移模型的JA模型参数辨识,在一定程度上提高了辨识精度和效率,但所辨识参数仅局限于磁滞模型参数。然而混合算法在超磁致伸缩换能器参数辨识中应用较少,且换能器参数耦合性强,其磁机参数与结构参数灵敏度差异大,考虑棒材切割后的涡流效应会导致参数辨识中的多极值点现象更加严峻,精确辨识参数较为困难。故亟须研究鲁棒性更强的混合算法并将其引入换能器的参数辨识,以提升模型输出特性分析的效率。
基于现有研究成果,首先本文从计算等效涡流因子出发考虑GMM径向非均匀切割方式的涡流效应,进而构建考虑磁滞非线性影响的超磁致伸缩换能器电-磁-机场耦合综合电路模型,以有效描述其输出行为,而其中JA模型参数耦合性强,涡流因子复参数影响磁场大小和相位,GMM参数在不同工况下多变,机械参数与换能器输出位移直接相关,是亟待辨识的关键参数;其次,本文提出一种人工鱼群算法(Artificial Fish Swarm Algorithm, AFSA)和布谷鸟搜索(Cuckoo Search, CS)算法混合的参数辨识方法,并引入精英个体反向学习策略、动态步长和动态发现概率来改进混合算法,平衡算法全局和局部搜索能力来针对换能器模型多维度、强耦合参数提取困难的问题;最后搭建超磁致伸缩换能器实验平台,验证论文所提模型和算法的有效性,进而快速有效分析换能器各工况下的输出特性。
超磁致伸缩换能器结构如图1所示,按照换能器的功能可以将其结构分为驱动模块、磁路模块和机械输出模块。其中驱动模块包括激励线圈、永磁体以及外加交直流电源,激励线圈是电磁转换的媒介,交流电源为换能器提供所需交变磁场,永磁体和直流电源为GMM棒提供偏置磁场防止棒材应变出现“倍频”现象;磁路模块包括GMM棒、永磁体、极头、硅钢套筒、硅钢下底座和硅钢上盖板及其与导磁块间的微小空气隙,组成较为闭合的磁回路,减小磁路中的漏磁场;机械输出模块包括辐射头、碟簧和GMM棒,描述换能器的实际输出位移。换能器工作前用预紧螺栓和碟簧相配合的方式为GMM棒施加较为稳定的预应力,改善棒材的应变特性,换能器工作时,交直流电源和永磁体为磁回路提供磁场,使GMM棒产生轴向应变及输出力推动辐射头产生周期性往复运动。
图1 超磁致伸缩换能器结构
Fig.1 Structural diagram of giant magnetostrictive transducer
超磁致伸缩换能器常采用切割方式减小GMM涡流,并配合预应力和偏磁提升磁机能量转换效率,具有复杂的非线性输入-输出特性,构建其多场耦合模型是研究超磁致伸缩换能器输出特性的关键。换能器模型包括:涡流因子复参数、磁-机耦合参数和结构动力学参数,如何高效辨识参数是目前亟待研究的内容。本文换能器建模及参数辨识研究框架如图2所示,在建立考虑涡流因子的换能器多场耦合模型的基础上,通过人工智能混合算法辨识多工况影响下的模型参数。
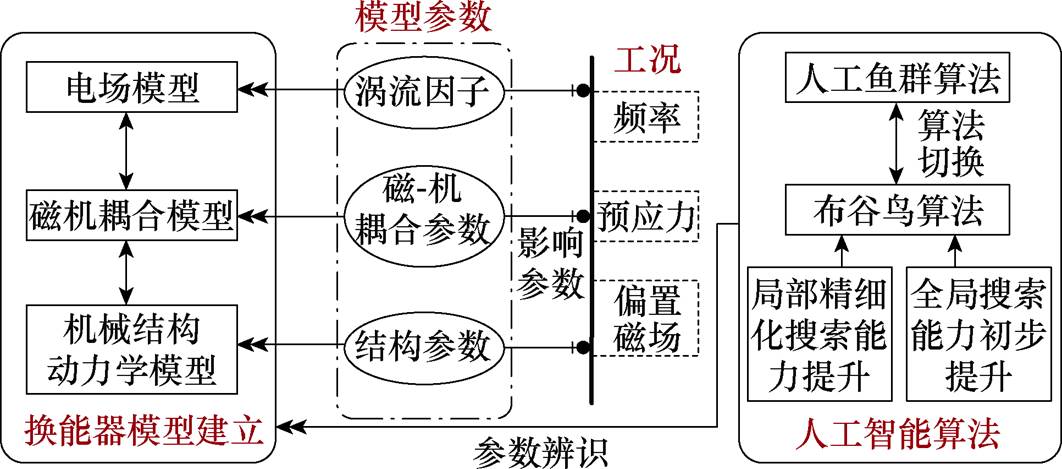
图2 换能器建模及参数辨识研究框架
Fig.2 Research framework on modeling and parameter identification of transducers
本节对超磁致伸缩换能器综合电路模型进行构建,具体包括电磁等效部分、GMM磁-机耦合部分和机械振动部分。在电磁等效部分计算棒材切割后的等效涡流因子,并构建磁回路等效电路模型;在GMM磁-机耦合部分采用JA模型描述磁化过程,进而通过应力修正的二次畴转模型计算棒材应变;在换能器机械振动部分,采用单自由度振动模型来描述换能器的输出位移。
本节对GMM棒材切割后的等效涡流因子进行详细计算,构建考虑棒材切割涡流效应的换能器磁回路等效电路模型。换能器的电磁等效电路如图3所示。图中,U为输入电压,i为输入电流,Urod为GMM棒两端等效电压;Rcoil和Lcoil分别为线圈电阻和静态电感,Lleak为回路漏磁电感,Lpath为硅钢套筒、上盖板和下底座的等效电感,Rrod和Lrod分别为考虑涡流时棒材等效电阻和电感;MMF为线圈通入电流后产生的磁动势, 为磁通量,gpath为硅钢套筒、极头、上盖板和下底座总磁阻,gleak为回路漏磁阻,gpm为永磁体磁阻,grodXw为考虑涡流效应的棒材磁阻,其中grod为不考虑涡流的棒材磁阻,Xw为等效涡流因子。
为磁通量,gpath为硅钢套筒、极头、上盖板和下底座总磁阻,gleak为回路漏磁阻,gpm为永磁体磁阻,grodXw为考虑涡流效应的棒材磁阻,其中grod为不考虑涡流的棒材磁阻,Xw为等效涡流因子。
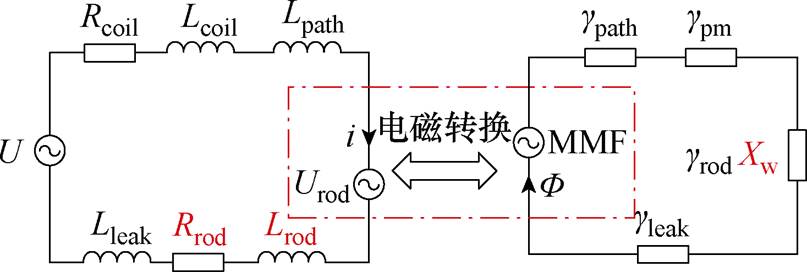
图3 换能器电磁等效电路
Fig.3 Electromagnetic equivalent circuit of transducer
等效涡流因子由棒材的切割方式决定,本文对GMM棒采用径向非均匀切割法,棒材涡流分为25条支路分布,包括外圆周16处、内圆周8处和中心圆周1处。切割后棒材等效涡流因子可表示为
 (1)
(1)
式中,XRwi和XIwi为第i条支路等效涡流因子的实部和虚部,与GMM棒材的激励频率相关。因此,切割后的GMM棒材等效磁路如图4所示。
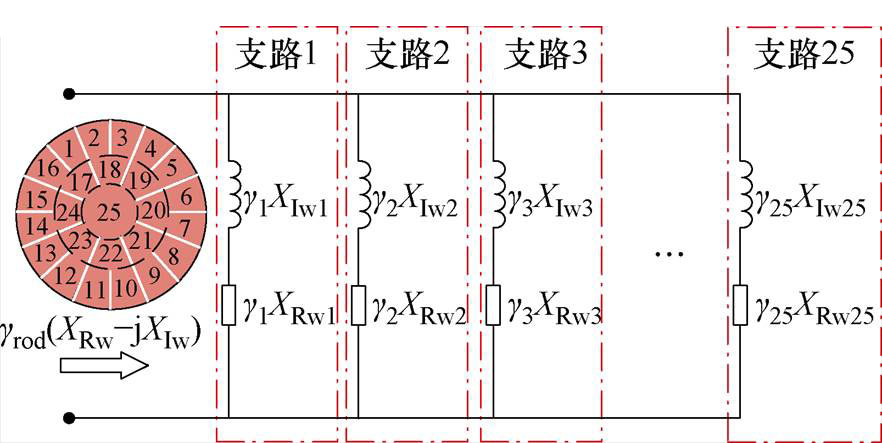
图4 径向棒材切割等效磁路
Fig.4 Equivalent magnetic circuit diagram of radial cutting bar
由于径向非均匀切割方式具有一定对称性,将沿着棒材外圆周分布的16条支路参数视为相同,沿着内圆周分布的8条支路参数视为相同。图4中,gi为不考虑涡流情况下第i条支路的整体磁阻,XRwi- jXIwi为第i条支路上的涡流等效因子,则有
g1=g2=…=g16
g17=g18=…=g24
XRw1-jXIw1=XRw2-jXIw2=…=XRw16-jXIw16
XRw17-jXIw17=XRw18-jXIw18=…=XRw24-jXIw24
因此,考虑涡流的棒材整体磁阻grod(XRw-jXIw)为

 (2)
(2)
式中,XRw和XIw分别为棒材切割后等效涡流因子的实部和虚部,则磁回路等效电路模型考虑涡流的GMM棒阻抗计算式为
 (3)
(3)
式中,Lrod0为不考虑涡流的棒材静态电感。则由图3可知换能器磁回路电路模型表达式为
 (4)
(4)
式(4)中棒材等效电压Urod的表达式[22]为
 (5)
(5)
式中,N为线圈匝数; 为GMM棒磁导率;H为激励磁场强度;S为GMM棒的横截面积;
为GMM棒磁导率;H为激励磁场强度;S为GMM棒的横截面积; 为棒材等效磁通;x为换能器的输出位移;kx-H为机-磁转换系数。
为棒材等效磁通;x为换能器的输出位移;kx-H为机-磁转换系数。
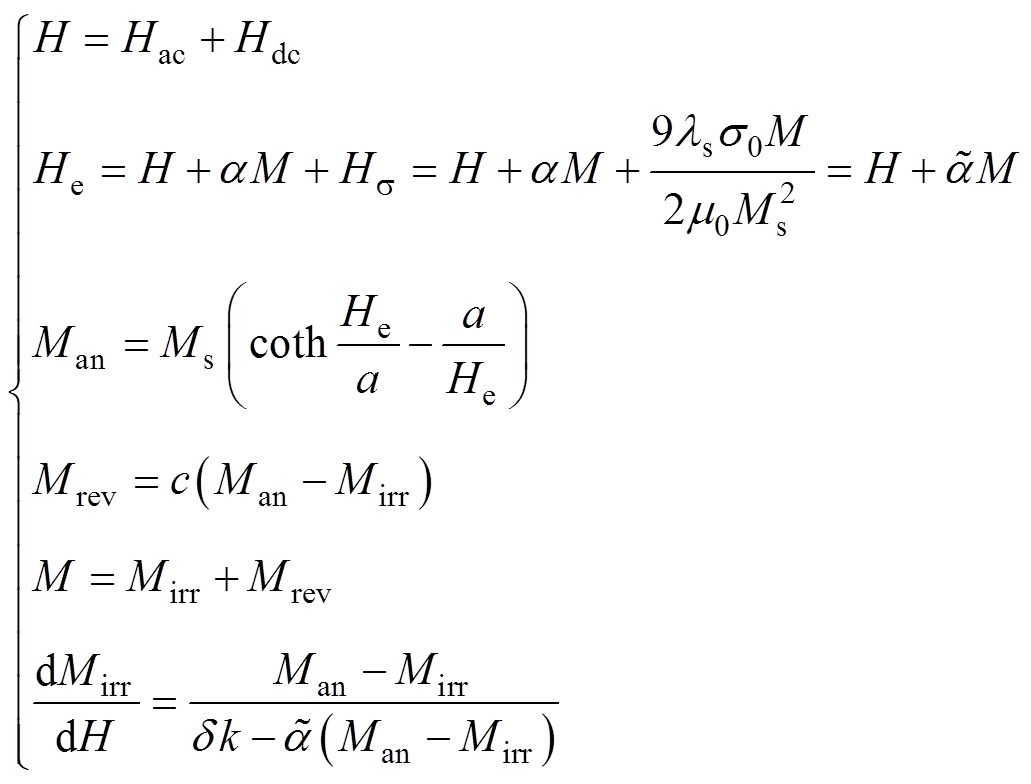
本文采用考虑预应力和偏磁的JA模型来描述棒材的磁化过程,JA模型具体表达式为
 (6)
(6)
式中,Hac和Hdc分别为外加交、直流激励磁场; 为真空磁导率;He为有效磁场强度;
为真空磁导率;He为有效磁场强度; 为由预应力
为由预应力 引起的有效磁场;
引起的有效磁场; 为GMM棒饱和磁致伸缩系数;a、c、Ms、a、k分别为磁畴内部平均场耦合系数、可逆系数、饱和磁化强度、形状系数和钉扎系数;
为GMM棒饱和磁致伸缩系数;a、c、Ms、a、k分别为磁畴内部平均场耦合系数、可逆系数、饱和磁化强度、形状系数和钉扎系数; 为考虑预应力的平均场耦合系数;M、Mrev和Mirr分别为棒材的磁化强度、可逆磁化强度和不可逆磁化强度;
为考虑预应力的平均场耦合系数;M、Mrev和Mirr分别为棒材的磁化强度、可逆磁化强度和不可逆磁化强度; 为方向系数,保证钉扎总是阻碍磁化过程,当dH/dt>0时,=1,当dH/dt<0时,=-1。
为方向系数,保证钉扎总是阻碍磁化过程,当dH/dt>0时,=1,当dH/dt<0时,=-1。
通过JA模型计算的磁化强度,结合考虑预应力的二次畴转模型来描述GMM棒材的磁致伸缩应变 ,计算式为
,计算式为
 (7)
(7)
式中, 为饱和磁化强度下的饱和应力。
为饱和磁化强度下的饱和应力。
为描述GMM棒材应变引起的换能器实际位移输出特性,本节建立换能器机械振动模型,将换能器机械结构等效成单自由度振动系统来计算换能器输出位移,棒材的输出力F可表示为
 (8)
(8)
式中,E为GMM棒材的杨氏模量。用Mm、Cm和Km分别表示换能器整体机械部分的等效质量、阻尼和刚度,则换能器机械端口等效电路方程为
 (9)
(9)
式中,u为换能器振速,由振速为输出位移x的导数关系可推出x满足
 (10)
(10)
换能器综合等效电路模型如图5所示,该模型完整地考虑了电-磁-机耦合关系,对其中关键参数Ms、a、k、a、c、E、、Mm、Cm、Km、XRw、XIw进行精确辨识可以进一步优化换能器模型。
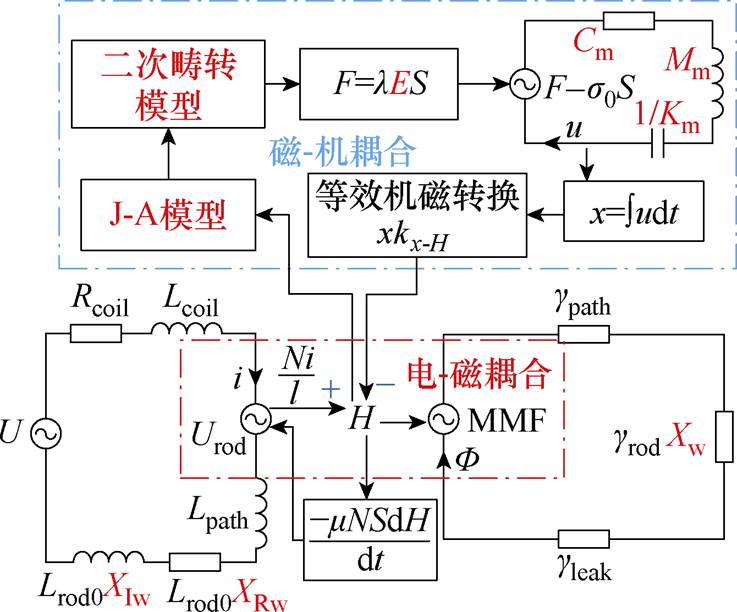
图5 换能器综合电路模型
Fig.5 Comprehensive circuit model of transducer
为精确获得第2节所述换能器多场模型的关键参数。本节引入一种改进的人工鱼群和布谷鸟参数辨识混合算法,该混合算法收敛速度快、精度高且稳定性强,适合辨识多维度、强耦合的换能器综合电路模型参数,是一种有效可行的人工智能优化算法。
布谷鸟搜索(CS)算法包括莱维飞行更新策略和随机局部游走策略,前者利于全局搜索,后者利于局部寻优,二者通过迭代更新鸟巢位置逼近最优解,在本文辨识工作中,第i个鸟巢位置用Xi=[Ms a k a c E Mm Cm Km XRw XIw]向量来表示。
莱维飞行是一种大小步长相间的鸟巢位置更新策略,其根据式(11)来改变鸟巢位置。
 (11)
(11)
 (12)
(12)
式中,Xglevy为Xi执行完莱维飞行后的位置; 为步长缩放因子;steplevy为服从莱维分布的步长;
为步长缩放因子;steplevy为服从莱维分布的步长; 的取值通常在1.5~2之间;u1和v1为服从正态分布的随机数,u1~N(0,
的取值通常在1.5~2之间;u1和v1为服从正态分布的随机数,u1~N(0,  ),v1~N(0, 1),
),v1~N(0, 1), ;Γ为伽马函数。
;Γ为伽马函数。
局部随机游走从式(11)所更新种群中随机选择两个鸟巢位置Xt和Xk进行矢量相减,再以发现概率Pa对种群进行更新,具体更新策略公式为
 (13)
(13)
式中,Xplevy为Xglevy执行完局部随机游走后的位置;step1为随机游走的步长;Hea为Heaviside函数;当rand>Pa时,Hea=1,即对鸟巢进行了局部随机游走,当rand<Pa,Hea=0,即对当前鸟巢位置进行了保留,rand为0~1内的随机数。
CS以莱维分布为核心,莱维飞行更新策略中的大步长利于算法跳出局部最优解,但是迭代后期大步长的随机出现也可能使算法错过全局最优解,而随机局部游走是后期局部精细化搜索的保证,但局部游走的出现与发现概率相关。因此,本文对经典布谷鸟搜索算法的步长缩放因子和发现概率Pa进行改进,使二者随迭代次数的增加非线性递减,削弱算法迭代后期大步长的出现对寻优结果的影响,并使局部游走执行的概率增大,具体改进公式为
 (14)
(14)
 (15)
(15)
式中, 为初始步长缩放因子;tn为当前迭代次数;tmax为布谷鸟搜索算法最大迭代次数。
为初始步长缩放因子;tn为当前迭代次数;tmax为布谷鸟搜索算法最大迭代次数。
为了初步扩大CS的搜索区域,将精英个体反向学习策略引入CS,精英个体指代种群中适应度更优的个体,比其他个体包含的信息通常更加有效,因此可构造精英个体的反向个体以增加种群的多样性。精英个体为当前种群适应度值最好的前ne个个体,ne通常满足ne/N1=0.1,N1为种群个体数目。计算反向种群的适应度值,并将其与当前种群的适应度值一起排序,选择适应度较优的前N1个个体构成下一次迭代的种群,反向种群构建方法为
 (16)
(16)
式中, 为构建的反向个体i的第j维量;xijmax 和xijmin分别为策略中的动态上、下边界,xijmax=max(Xij),xijmin=min(Xij);Xplevy.best.j为式(13)更新后种群中精英个体的第j维量。
为构建的反向个体i的第j维量;xijmax 和xijmin分别为策略中的动态上、下边界,xijmax=max(Xij),xijmin=min(Xij);Xplevy.best.j为式(13)更新后种群中精英个体的第j维量。
采用这两种改进策略对布谷鸟算法精细化搜索能力有较大的提升,有利于eCS得到更高精度的解。
前述eCS算法减少大步长出现的做法为精细化搜索提供了便利,但却以牺牲全局搜索能力为代价,可能导致搜索到精度较高的区域,也会由于换能器综合电路模型参数多维度、强耦合的特点成为局部最优解。显然此现象与算法全局搜索能力的缺失相关,故引入人工鱼群算法(AFSA),并与eCS结合成混合算法AFSA-eCS。AFSA-eCS利用AFSA较强的全局搜索能力缩小解空间,再利用eCS的局部精细化搜索能力寻找最优解,可以很好地追踪全局最优解。
AFSA包含聚群、追尾、觅食和随机行为,四种行为具体执行如下:
聚群行为:人工鱼Xi视野内所有人工鱼中心位置Xc的食物浓度高而且不拥挤,则向中心位置移动,若食物浓度不如当前位置或中心位置较拥挤,则执行觅食行为。聚群行为更新公式为
 (17)
(17)
式中,Xswarm为执行完聚群行为后的人工鱼的位置;step为人工鱼的移动步长; 为二者之间的二范数,为Xc与Xi的直线距离。
为二者之间的二范数,为Xc与Xi的直线距离。
追尾行为:人工鱼Xi在视野内寻找发现最多食物的鱼的位置Xpb,且位置不拥挤,则会追尾而来,若Xpb食物量不如当前位置或过多鱼群聚集,则执行觅食行为。追尾更新公式与聚群类似不再赘述。
觅食行为:人工鱼Xi在视野范围内多次随机寻找位置,若找到比当前食物浓度高的位置,则向其移动一步,若找不到更好的位置则执行随机行为。
随机行为:人工鱼Xi在自身视野范围内随机移动一步。
为了尽可能防止混合算法陷入局部最优,本节还提供两算法之间的切换细则,见式(18)和式(19)。
 (18)
(18)
 (19)
(19)
式(18)和式(19)体现算法两次迭代间适应度值的降幅,其中 和
和 分别为第t次迭代AFSA和eCS算法获取的适应度值,
分别为第t次迭代AFSA和eCS算法获取的适应度值, 和
和 都是较小的正数。当连续n1次迭代满足式(18)时,则由AFSA切换到eCS算法;当连续n2次迭代满足式(19)时,则由eCS切换到AFSA算法。
都是较小的正数。当连续n1次迭代满足式(18)时,则由AFSA切换到eCS算法;当连续n2次迭代满足式(19)时,则由eCS切换到AFSA算法。
AFSA算法快速缩小最优解所在区域后,鱼群的拥挤度变大,聚群、追尾行为执行概率小,觅食、随机行为执行概率大,而觅食、随机行为具有较大寻优随机性,盲目地随机移动即使能向最优解靠近,也将是一个效率低的过程。针对换能器综合电路模型多耦合参数辨识困难的问题,需要结合eCS提升AFSA算法局部精细化搜索能力,执行一次完整AFSA-eCS算法切换的简要示意图如图6所示。
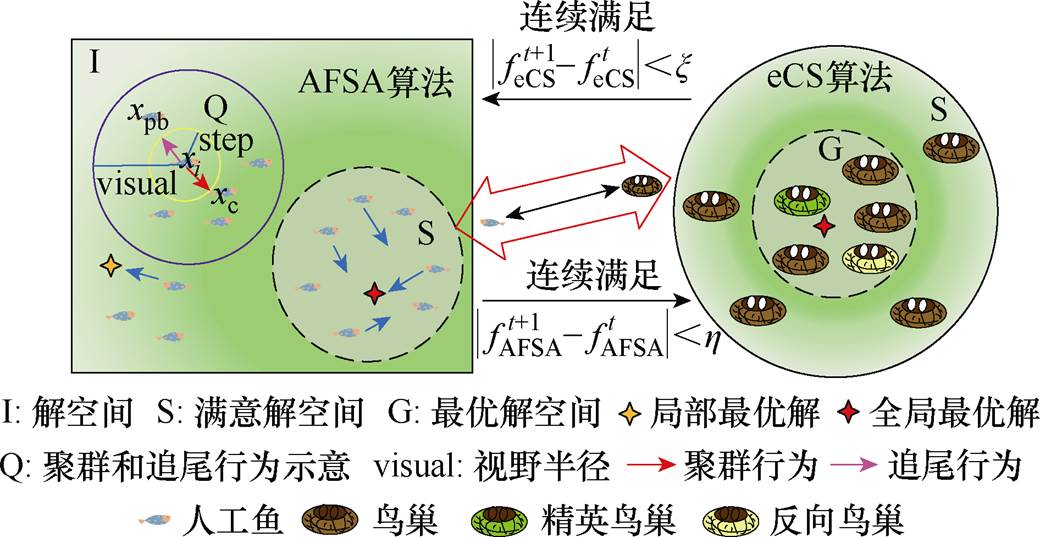
图6 AFSA-eCS算法单元寻优示意图
Fig.6 Schematic diagram of AFSA-eCS algorithm optimization
本文采用换能器实测电流-位移曲线与模型计算电流-位移曲线的方均根误差作为适应度函数为
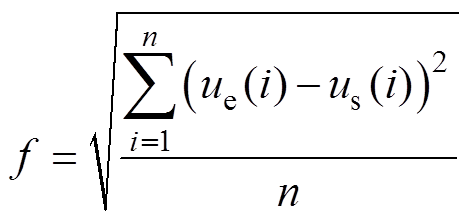 (20)
(20)
式中,f为适应度函数值;n为采样点个数;ue为换能器实测位移;us为综合电路模型计算位移。
采用AFSA-eCS辨识参数时,应遵从如下流程:
(1)初始化种群,调用综合电路模型及式(20)计算初始适应度值,记录初始最优个体。
(2)对种群进行归一化处理,保持所有参数在同一数量级,利于算法更新步长。
(3)进入AFSA算法迭代,同时进行聚群行为和追尾行为两条支线更新,对比两支线所得解,进而更新全局最优解。
(4)判断AFSA算法的最优适应度值是否连续n1次满足式(18),若满足,则切换至步骤(5)eCS算法;若不满足,则AFSA迭代次数加1,返回步骤(3)。
(5)进入eCS迭代,依次执行莱维飞行、随机局部游走和精英个体反向学习更新策略,得到该次迭代的最终种群并找出最优个体,即更新全局最优解。
(6)判断是否达到算法设定精度或最大迭代次数,满足条件则输出寻找到的最优解,算法结束;不满足,则进入步骤(7)。
(7)判断eCS算法的最优适应度值是否连续n2次迭代满足式(19);满足条件则返回AFSA算法再次寻找最优解区域,不满足则eCS算法迭代次数加1,返回步骤(5)。本文算法执行流程如图7所示。
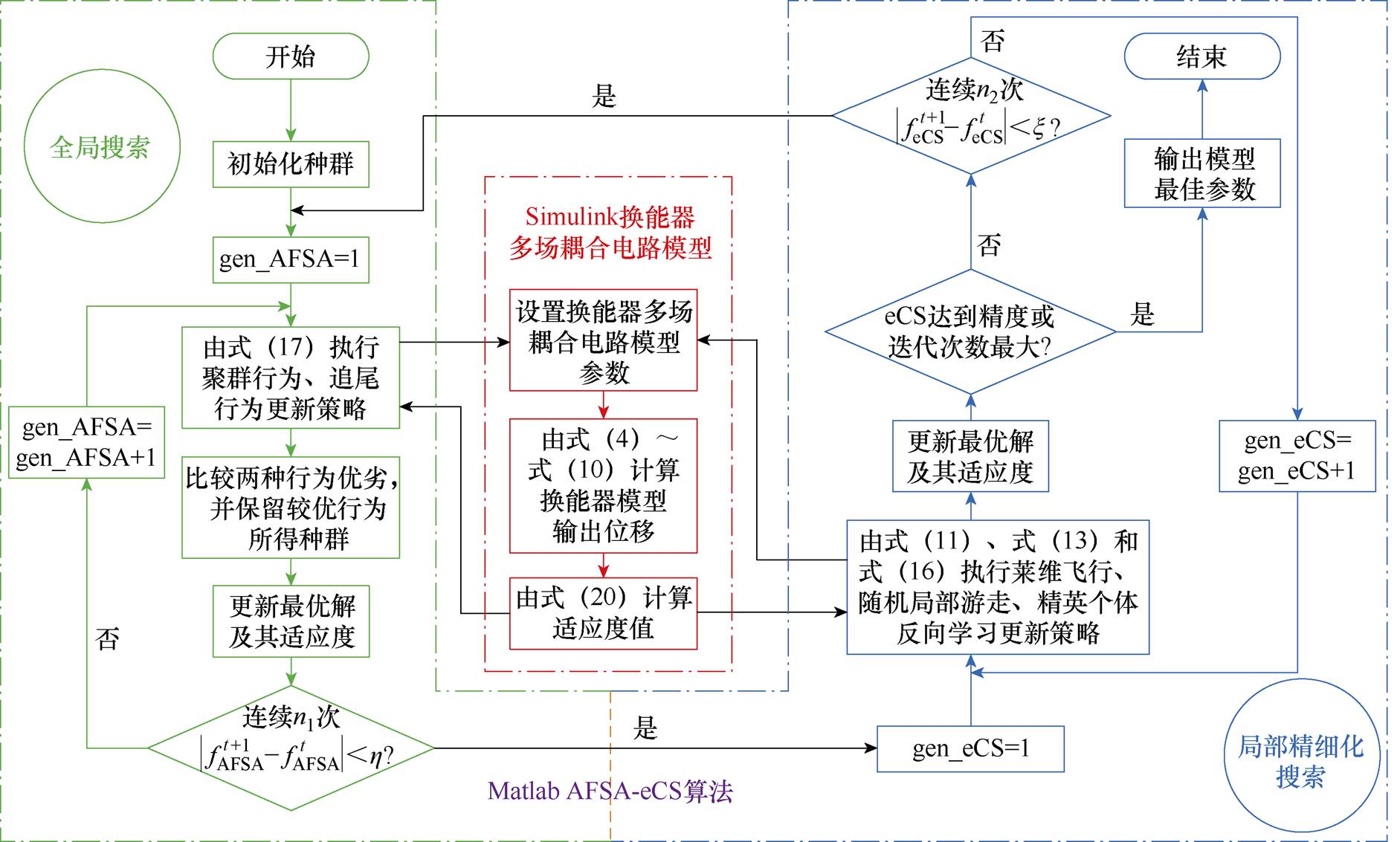
图7 AFSA-eCS算法执行流程
Fig.7 AFSA-eCS algorithm execution flow chart
超磁致伸缩换能器实验平台如图8所示,在测试前调节预紧螺栓对GMM棒材施加预应力,测试时信号发生器产生的正弦激励经功率放大器放大至所需电流激励,激励电流通过线圈产生磁场驱动棒材发生应变,测试过程中采用电流探头监测输入电流的大小,激光位移传感器测量辐射头输出位移。
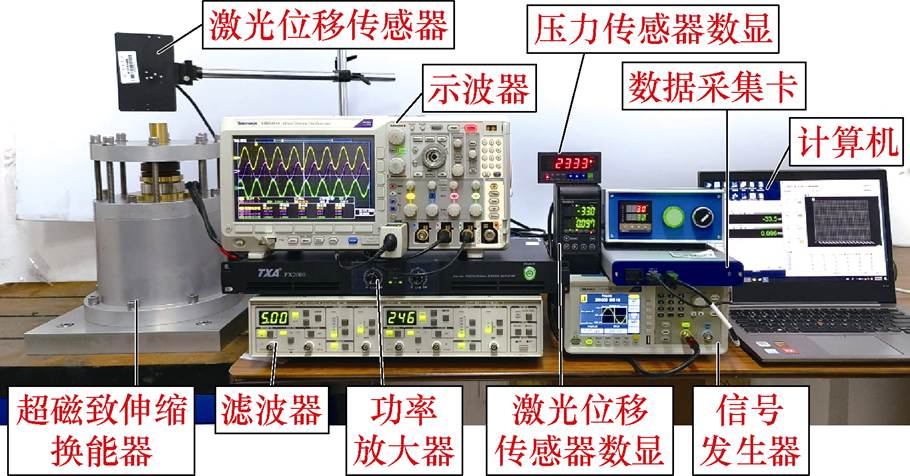
图8 超磁致伸缩换能器实验平台
Fig.8 Giant magnetostrictive transducer experimental platform
在预应力为24 MPa、偏置磁场为30 kA/m的条件下,实测换能器在300 Hz、幅值5 A的正弦交流激励工况下的电流-位移曲线,并采用PSO、eCS、GA-SA和AFSA-eCS算法对模型进行参数辨识,迭代次数设置为100次,且将AFSA-eCS算法切换条件中n1设置为5次,n2设置为7次。不同算法所辨识参数由表1给出,算法收敛代数、收敛时间和曲线拟合误差统计见表2,其中收敛代数判定准则为“算法达到某精度后,在后续的迭代中精度没有明显的提升”,由表1参数得到的曲线拟合效果如图9所示,适应度函数值随迭代次数变化如图10所示。
表1 各算法的换能器模型参数辨识结果
Tab.1 Identification results of transducer model parameters for each algorithm
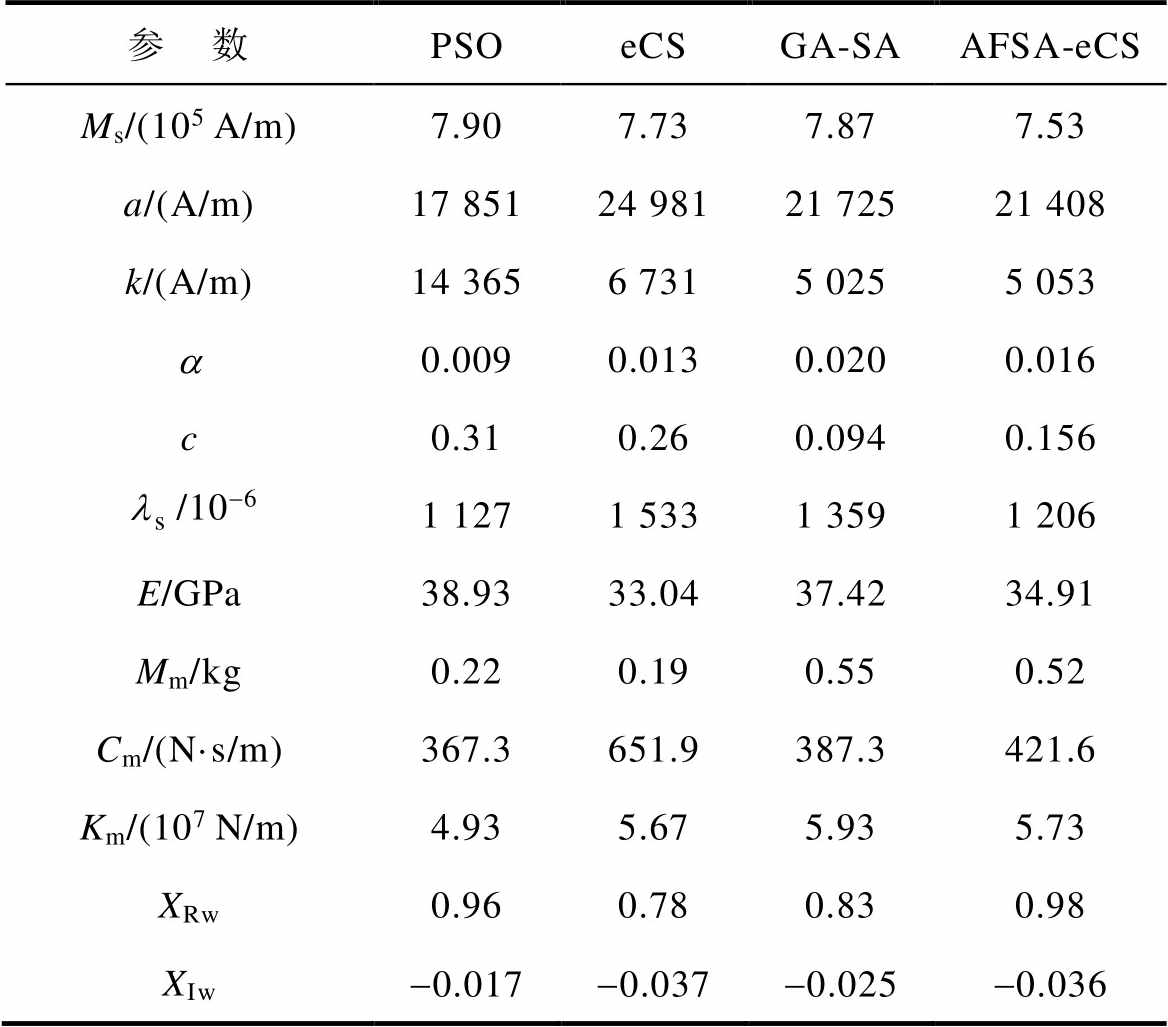
参 数PSOeCSGA-SAAFSA-eCS Ms/(105 A/m)7.907.737.877.53 a/(A/m)17 85124 98121 72521 408 k/(A/m)14 3656 7315 0255 053 a0.0090.0130.0200.016 c0.310.260.0940.156 /10-61 1271 5331 3591 206 E/GPa38.9333.0437.4234.91 Mm/kg0.220.190.550.52 Cm/(N·s/m)367.3651.9387.3421.6 Km/(107 N/m)4.935.675.935.73 XRw0.960.780.830.98 XIw-0.017-0.037-0.025-0.036
表2 各算法性能对比
Tab.2 Performance comparison of various algorithms
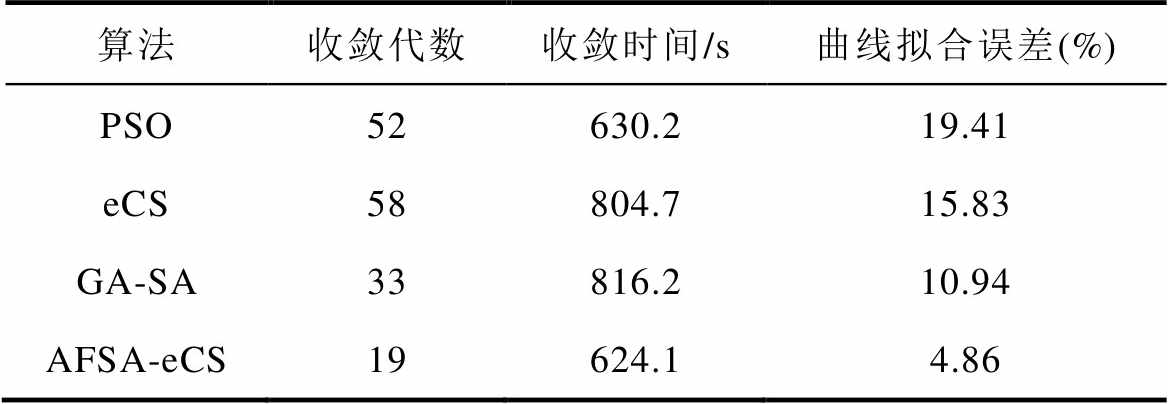
算法收敛代数收敛时间/s曲线拟合误差(%) PSO52630.219.41 eCS58804.715.83 GA-SA33816.210.94 AFSA-eCS19624.14.86
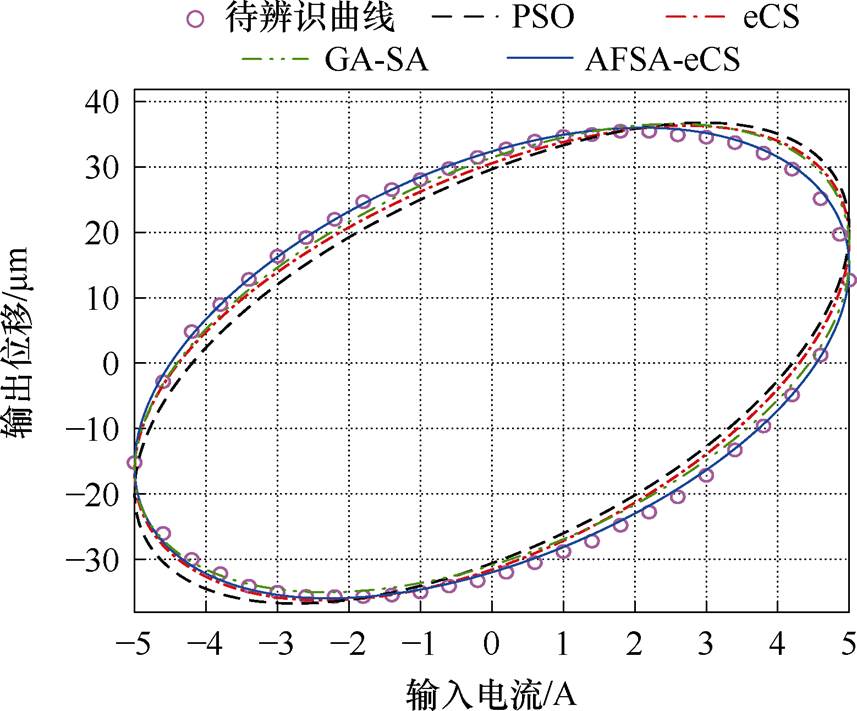
图9 各算法拟合曲线效果
Fig.9 Effect of fitting curves with various algorithms

图10 不同算法适应度值随迭代次数变化
Fig.10 Graph of fitness values of different algorithms varying with the number of iterations
由图9可以看出,PSO对实测曲线的拟合效果较差,实测曲线与仿真曲线拟合误差达到19.41%;eCS算法对实测曲线的拟合效果比PSO更好,误差为15.83%;而混合算法GA-SA相较于上述单一算法的寻优精度有较大提升,误差为10.94%;而本文所提出的AFSA-eCS算法拟合效果最好,对参数的辨识精度最高,实测曲线与仿真的相对误差仅为4.86%,相较于单一算法和GA-SA混合算法在精度上更具优势。
由图10和表2可以发现AFSA-eCS仅迭代19次就收敛,收敛时间仅有624.1 s,而其他三种算法的收敛代数和时间均高于本文算法,表明本文算法在确保参数辨识精度的同时,能够兼顾辨识效率。为验证算法的稳定性,采用上述四种算法分别对模型进行4次参数辨识并对参数归一化,且用箱线图统计不同算法4次辨识参数的波动性,如图11所示。
图11 各算法参数辨识结果箱线统计图
Fig.11 Boxplot statistics of parameter identification results with various algorithms
由图11可以看出,PSO、eCS算法所辨识的a、k、 、Mm、Km、XRw、XIw等参数的箱体高度较高,波动性较大,说明单一算法的辨识参数可重复性较差;而GA-SA和AFSA-eCS算法各参数的箱体高度、最大值与最小值的差值均比其他两种单一算法更小,且箱体位置较为一致,体现出混合算法较强的全局搜索能力。对比两个混合算法的箱线图,总体上AFSA-eCS箱体比GA-SA更小,仅有Cm和Km箱体高度比GA-SA稍高,体现本文所提混合算法具有较强的寻优重复性,辨识结果的稳定性高。
、Mm、Km、XRw、XIw等参数的箱体高度较高,波动性较大,说明单一算法的辨识参数可重复性较差;而GA-SA和AFSA-eCS算法各参数的箱体高度、最大值与最小值的差值均比其他两种单一算法更小,且箱体位置较为一致,体现出混合算法较强的全局搜索能力。对比两个混合算法的箱线图,总体上AFSA-eCS箱体比GA-SA更小,仅有Cm和Km箱体高度比GA-SA稍高,体现本文所提混合算法具有较强的寻优重复性,辨识结果的稳定性高。
综上所述,AFSA-eCS算法具有收敛速度快、收敛精度高且可重复性强的特点,能够适用于换能器综合电路模型参数辨识。
4.3.1 考虑涡流因子模型效果验证
本节基于不同频率下换能器的电流-位移曲线,对比了有无等效涡流因子模型对各频率换能器输出曲线的模拟效果,如图12所示。
(a)100 Hz (b)200 Hz
(c)400 Hz (d)500 Hz
图12 有无涡流因子模型拟合各频率实验输出曲线
Fig.12 Fitting experimental curves of various frequencies using models with and without eddy current factor
通过图12可以看出,本文考虑涡流因子的换能器模型对各频率曲线的拟合效果良好,最大误差仅为500 Hz时的9.09%,而无涡流因子模型对不同频率实测输出位移曲线的模拟有不同程度的偏差,随着频率的上升,无涡流因子模型的拟合误差由14.2%上升到36.7%,这是由于更大的工作频率会导致更显著的涡流效应。无涡流因子模型忽略了电磁转换过程中的涡流损耗,模型所计算的超磁致伸缩棒材激励磁场比真实值更大。因此,考虑棒材切割等效涡流因子可以有效反映换能器的涡流效应,验证了本文模型的准确性,为本文算法所辨识参数的有效性提供了支撑。
4.3.2 不同偏置工况下模型输出特性分析
本节进一步基于不同预应力和偏置磁场条件下的实测位移曲线,分析本文模型和算法在不同工况下的适用性。所使用GMM棒在20~32 MPa预应力下,线性区较宽,且此段预应力下,采用25~45 kA/m偏置磁场可以调整棒材工作点处于线性区,所以常施加此范围的预应力和偏置磁场能使棒材输出较大的应变。
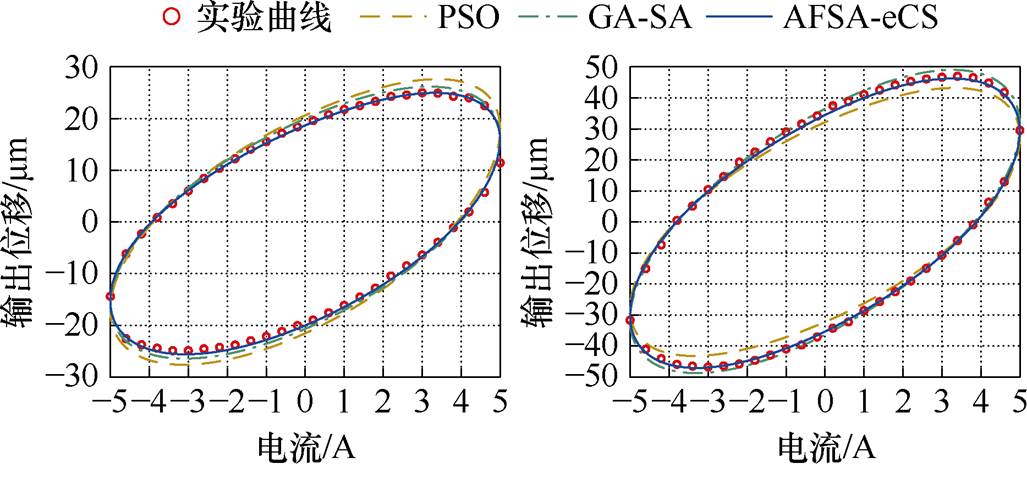
故在外加正弦电流幅值为5 A、频率200 Hz、偏置磁场为30 kA/m条件下,分析了不同预应力下各算法对换能器电流-位移输出特性的辨识效果,实验曲线拟合效果如图13所示,辨识误差见表3。
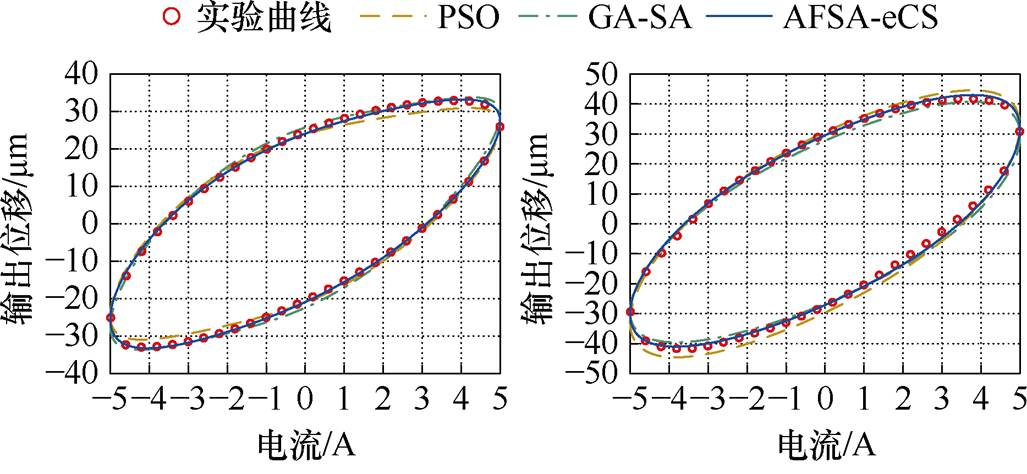
(a)预应力20 Mpa (b)预应力24 MPa
(c)预应力28 Mpa (d)预应力32 MPa
图13 不同预应力下各算法的辨识效果
Fig.13 Identification effect of various algorithms under different prestress
表3 三种算法在各预应力下的辨识误差
Tab.3 Identification errors of three algorithms under different prestress

算法误差(%) 20 MPa24 MPa28 MPa32 MPa PSO18.314.820.413.7 GA-SA13.014.211.98.66 本文算法5.356.718.304.96
从图13和表3可以看出,AFSA-eCS算法对各预应力下实验曲线的模拟效果均比较好,当预应力为28 MPa时,AFSA-eCS算法所拟合曲线与实验曲线有最大平均误差8.30%,小于PSO的20.4%和GA- SA的11.9%。从模型的角度分析,在固定外加激励电流和偏磁的条件下,随着预应力在20~32 MPa的上升,换能器输出位移有效值先增大后减小,4个测试点中的极大值点为24 MPa,对应输出位移有效值29.3 μm,说明在其他条件不变的前提下,20~32 MPa预应力中存在最佳预应力,使得换能器有最优输出特性;此外,模型能够通过本文算法的参数辨识来跟踪换能器不同预应力下的实际输出特性,可为换能器预应力的合理施加起到一定指导作用。
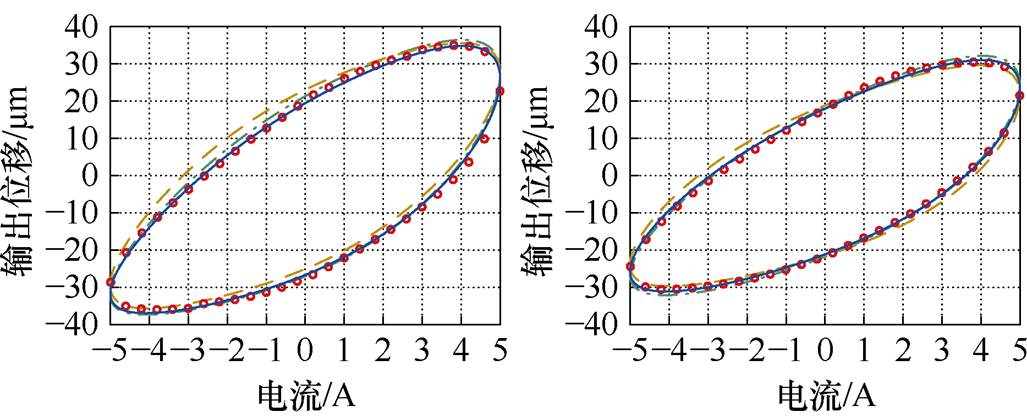
在上述预应力极大值点24 MPa的条件下,分析了不同偏置磁场下各算法对换能器电流-位移输出特性的辨识效果,实验曲线拟合效果如图14所示。
(a)偏置磁场25 kA/m (b)偏置磁场35 kA/m
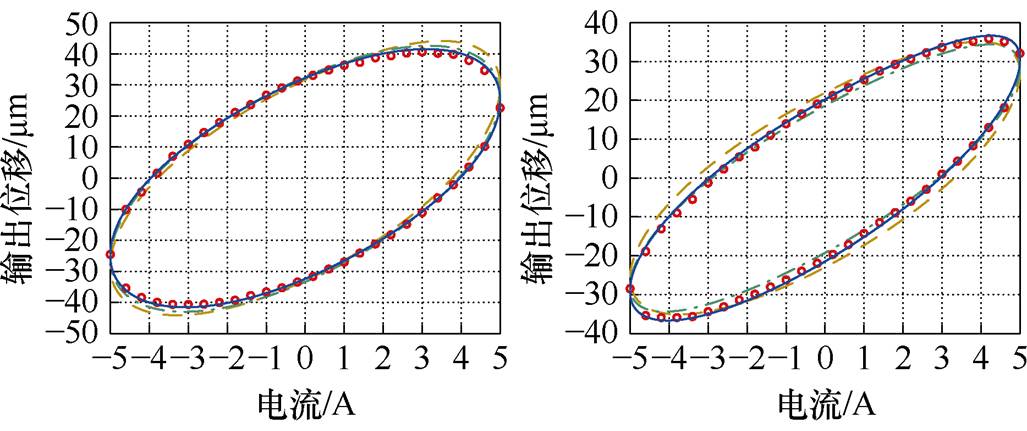
(c)偏置磁场40 kA/m (d)偏置磁场45 kA/m
图14 不同偏置磁场下各算法的辨识效果
Fig.14 Identification effect of various algorithms under different bias magnetic fields
通过图14的实验结果来看,AFSA-eCS算法对各偏置磁场下实验曲线的模拟效果均较好,当偏磁为25 kA/m时,本文算法所辨识曲线与实验曲线有最大平均误差8.74%,而PSO和GA-SA算法的辨识误差分别达到19.7%和11.5%。从模型的角度来分析,在固定外加激励电流和预应力下,由于GMM棒材的应变饱和特性,随着偏置磁场从25~45 kA/m的上升,换能器的输出位移同样先增加后减小,存在极大值点35 kA/m,对应的输出位移有效值为32.4 μm;此外,模型能够通过本文算法的参数辨识跟踪换能器不同偏磁下的实际输出特性,可为换能器偏置磁场的合理施加提供一定指导。
综上所述,本文提出的换能器综合电路模型可以模拟不同预应力和偏置磁场工况下的输出位移行为,并通过本文算法跟踪换能器的最佳工作点,为换能器的预应力和偏置磁场的优化设计提供参考。
围绕超磁致伸缩换能器多场耦合模型及其参数辨识难的问题,本文在构建考虑涡流因子的超磁致伸缩换能器综合电路模型的基础上,提出改进的人工鱼群和布谷鸟混合算法对综合电路模型的关键参数进行辨识,并且通过实验测试验证算法的各项性能,也验证了考虑涡流因子的重要性和所搭建模型在不同工况下的适用性。本文的主要结论如下:
1)本文提出的AFSA-eCS算法在辨识换能器多场耦合综合电路模型参数上表现出收敛速度快、寻优精度高和辨识稳定性强的特点,实测曲线拟合误差仅为4.86%,收敛时间为624.1 s,相较于单一算法和GA-SA混合算法更具有优越性。
2)本文模型在磁回路等效电路模型中计算等效涡流因子,在模拟换能器100~500 Hz频段的输出位移特性中取得良好的效果,而无涡流因子模型的模拟误差随着频率的上升而增加,说明在模型中考虑涡流因子的有效性。
3)通过AFSA-eCS辨识本文模型参数可以很好地模拟两种偏置工况下换能器实际输出特性,追踪换能器的最佳工作点,为超磁致伸缩换能器预应力和偏置磁场的优化设计提供支撑。
参考文献
[1] 黄文美, 刘泽群, 郭万里, 等. 磁致伸缩振动能量收集器的全耦合非线性等效电路模型[J]. 电工技术学报, 2023, 38(15): 4076-4086.
Huang Wenmei, Liu Zequn, Guo Wanli, et al. Fully coupled nonlinear equivalent circuit model for mag- netostrictive vibration energy harvester[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(15): 4076-4086.
[2] Huang Wenmei, Li Yafang, Weng Ling, et al. Multifield coupling model with dynamic losses for giant magnetostrictive transducer[J]. IEEE Transa- ctions on Applied Superconductivity, 2016, 26(4): 4900805.
[3] Xu Qingsong. Robust impedance control of a compliant microgripper for high-speed position/force regulation[J]. IEEE Transactions on Industrial Elec- tronics, 2015, 62(2): 1201-1209.
[4] Nouicer A, Nouicer E, Feliachi M. A neural network for incorporating the thermal effect on the magnetic hysteresis of the 3F3 material using the Jiles-Atherton model[J]. Journal of Magnetism and Magnetic Materials, 2015, 373: 240-243.
[5] 宁倩, 李桥, 高兵, 等. 电-磁-机-声多场边界下的超磁致伸缩Ⅳ型弯张换能器设计方法[J]. 电工技术学报, 2023, 38(12): 3112-3121.
Ning Qian, Li Qiao, Gao Bing, et al. Design of giant magnetostrictive class Ⅳ flextensional transducer under electrical-magnetic-mechanical-acoustic multi- field boundaries[J]. Transactions of China Electro- technical Society, 2023, 38(12): 3112-3121.
[6] Zhao Nengtong, Gao Bing, Yang Wenhu, et al. Design of underwater magnetostrictive longitudinal- type transducers with circuit model considering eddy currents and multi-rod structure[J]. Applied Acoustics, 2023, 202: 109112.
[7] Yang Guozhe, Zhang Yu, Liu Huifang, et al. Study on eddy current loss characteristics of precision giant magnetostrictive actuator considering magnetic field distribution[J]. International Journal of Nanomanufa- cturing, 2019, 15(4): 343.
[8] Niu Muqing, Yang Bintang, Yang Yikun, et al. Dynamic modelling of magnetostrictive actuator with fully coupled magneto-mechanical effects and various eddy-current losses[J]. Sensors and Actuators A: Physical, 2017, 258: 163-173.
[9] Liu Yongguang, Gao Xiaohui, Li Yunlong. Giant magnetostrictive actuator nonlinear dynamic Jiles- Atherton model[J]. Sensors and Actuators A: Physical, 2016, 250: 7-14.
[10] Zheng Jiaju, Cao Shuying, Wang Hongli, et al. Hybrid genetic algorithms for parameter identification of a hysteresis model of magnetostrictive actuators[J]. Neurocomputing, 2007, 70(4/5/6): 749-761.
[11] Calkins F T, Smith R C, Flatau A B. Energy-based hysteresis model for magnetostrictive transducers[J]. IEEE Transactions on Magnetics, 2000, 36(2): 429- 439.
[12] 曹淑瑛, 王博文, 郑加驹, 等. 应用混合遗传算法的超磁致伸缩致动器磁滞模型的参数辨识[J]. 中国电机工程学报, 2004, 24(10): 127-132.
Cao Shuying, Wang Bowen, Zheng Jiaju, et al. Parameter identification of hysteretic model for ginat magnetostrictive actuator using hybrid genetic algo- rithm[J]. Proceedings of the CSEE, 2004, 24(10): 127-132.
[13] Li Huiqi, Li Qingfeng, Zhang Junjie. Calculation of Jiles-Atherton hysteresis model’s parameters using mix of chaos optimization algorithm and simulated annealing algorithm[C]//2009 International Con- ference on Microwave Technology and Computational Electromagnetics (ICMTCE 2009), Beijing, 2009: 471-474.
[14] 杨理华, 李践飞, 吴海平, 等. 超磁致伸缩作动器非线性模型辨识研究[J]. 振动与冲击, 2015, 34(18): 142-146, 194.
Yang Lihua, Li Jianfei, Wu Haiping, et al. Parameter identification of nonlinear model of giant mag- netostrictive actuator[J]. Journal of Vibration and Shock, 2015, 34(18): 142-146, 194.
[15] Tian Jing, Zhang Jifeng, Li Boxiao. Parameter identi- fication of Bouc-Wen dynamic model for mag- netorheological shimmy damper based on improved simulated annealing algorithm[J]. The Journal of Engineering, 2020, 2020(14): 970-975.
[16] Yang Yikun, Yang Bintang, Niu Muqing. Parameter identification of Jiles-Atherton model for mag- netostrictive actuator using hybrid niching coral reefs optimization algorithm[J]. Sensors and Actuators A: Physical, 2017, 261: 184-195.
[17] 黄文美, 郭萍萍, 郭万里, 等. 直流偏置对磁致伸缩材料高频动态损耗及磁特性的影响分析[J]. 电工技术学报, 2022, 37(22): 5765-5775.
Huang Wenmei, Guo Pingping, Guo Wanli, et al. Impact analysis of DC bias on high-frequency dynamic loss and magnetic characteristics for magnetostrictive materials[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5765-5775.
[18] Li Husheng, Gao Bing, Yang Mingzhi, et al. Development of a comprehensive dynamic model for giant magnetostrictive transducers considering bias magnetic field[J]. IEEE Sensors Journal, 2024, 24(7): 10257-10269.
[19] 赵志刚, 马习纹, 姬俊安. 基于AFSA与PSO混合算法的J-A动态磁滞模型参数辨识及验证[J]. 仪器仪表学报, 2020, 41(1): 26-34.
Zhao Zhigang, Ma Xiwen, Ji Jun’an. Parameter identification and verification of J-A dynamic hysteresis model based on hybrid algorithms of AFSA and PSO[J]. Chinese Journal of Scientific Instrument, 2020, 41(1): 26-34.
[20] 刘任, 李琳, 王亚琦, 等. 基于随机性与确定性混合优化算法的Jiles-Atherton磁滞模型参数提取[J]. 电工技术学报, 2019, 34(11): 2260-2268.
Liu Ren, Li Lin, Wang Yaqi, et al. Parameter extraction for Jiles-Atherton hysteresis model based on the hybrid technique of stochastic and deter- ministic optimization algorithm[J]. Transactions of China Electrotechnical Society, 2019, 34(11): 2260- 2268.
[21] Deng Jia. Study on the giant magnetostrictive materials with actuator displacement model parameter identification[J]. Advanced Materials Research, 2013, 830: 37-40.
[22] Dozor D M, Engel B B, Kiley J E. Modeling, optimization, and control of magnetostrictive high force-to-mass ratio reaction mass actuators[C]//SPIE Proceedings", "Smart Structures and Materials 1997: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, 1997.
Abstract The multi-field coupling of electricity, magnetism, and mechanics affects the working performance of giant magnetostrictive transducers. A multi-field coupling model is often used to analyze the nonlinear output characteristics, and its parameters determine the model’s accuracy. The model has many key parameters with strong coupling, and the relationship between parameters in different working conditions is complex. Nowadays, artificial intelligence algorithms, such as particle swarm optimization and other single algorithms, are often combined to obtain parameters, which can easily lead to problems such as low identification accuracy, falling into local optima, and low stability. This paper constructs a comprehensive circuit model of the transducer considering the eddy current effect of bar cutting. An improved hybrid algorithm of artificial fish swarm and cuckoo search algorithm is used to identify the model.
Firstly, the equivalent eddy current factor is calculated. An equivalent circuit for a magnetostrictive transducer’s magnetic circuit, considering the non-uniform cutting of GMM rods, is constructed. Secondly, the classic JA hysteresis model is used to describe the magnetization process of the GMM rod, and the strain of the GMM rod is calculated using a stress-corrected secondary domain transition model to achieve the magneto-mechanical coupling process of the transducer. Then, a single-degree-of-freedom vibration model is used to describe the actual output displacement of the transducer radiation head. Finally, the artificial fish swarm algorithm with strong global searching ability and the cuckoo search algorithm with strong fine-grained searching ability are integrated. Thus, hybrid algorithms are introduced into parameter identification of transducer models to achieve fast, accurate, and stable extraction of model parameters.
In addition, a prototype of a giant magnetostrictive transducer is produced, and an output displacement testing platform is built. The proposed algorithm has significant advantages in curve fitting accuracy, identification speed, and stability, with a curve fitting error of only 4.86%. Then, the measured displacement curves at different frequencies show that considering the eddy current factor in non-uniform cut bars is essential for effectively analyzing the output characteristics of transducers. The output displacement curves of the transducer are analyzed under different prestress and bias magnetic fields. The proposed method provides an excellent prediction of the experimental results, indicating that the method can effectively track the actual output characteristics of transducers under different working conditions.
The following conclusions can be drawn. (1) In identifying transducer parameters, the proposed algorithm has higher identification accuracy, faster speed, and more robuststability than single algorithms and GA-SA hybrid algorithms. (2) Compared with the models with and without the eddy current factor, the importance of calculating the eddy current factor is demonstrated. (3) The output characteristics of transducers under different prestressed and biased magnetic field conditions can be effectively simulated using the proposed algorithm, and the optimal working point of transducers can be tracked, supporting the optimization design of transducers.
keywords:Giant magnetostrictive transducer, parameter identification, comprehensive circuit model, hybrid algorithm
DOI: 10.19595/j.cnki.1000-6753.tces.240043
中图分类号:TN712+.2
国家自然科学基金(52377010)、中国博士后科学基金(2023M741113)和中国博士后科学基金(2023M741114)资助项目。
收稿日期 2024-01-06
改稿日期 2024-03-13
高 兵 男,1987年生,副教授,博士生导师,研究方向为电能变换技术,电声装备多物理场建模与研制。E-mail: gbdnbh@hnu.edu.cn
吴泽伟 男,1999年生,硕士研究生,研究方向为电声换能技术。E-mail: 947999276@qq.com(通信作者)
(编辑 郭丽军)