图1 三相电压源逆变器
Fig.1 Three-phase voltage source inverter
摘要 电机相电流的精确采样对实现永磁同步电机的高性能控制至关重要。为获取准确的三相电流,通常需要三个或两个相电流传感器实现电流的精确测量。然而,采用多个电流传感器增加了控制系统的体积和成本,因此实现单电流传感器采样对于降低系统成本及小型化有重要的意义。该文以直流母线电流采样控制器的相电流重构方法为研究对象,针对其在空间矢量脉宽调制(SVPWM)控制下,在低调制比区间及扇区边缘区域存在电流重构盲区的问题,提出了使用动态零矢量脉宽调制(AZSPWM)代替SVPWM的控制方法,并采用插入矢量的方法弥补AZSPWM在低调制比区间存在重构盲区的问题。仿真及实验表明,该方法在低调制比区间及高调制比区间都能够精确地重构电机相电流,并可在无测量盲区的前提下实现高电压利用率。
关键词:电机控制 直流母线电流传感 相电流重构 动态零矢量脉宽调制 高电压利用率
在高性能交流电机控制中,通常采用双闭环矢量控制策略驱动电机,其具有抗干扰能力强、响应速度快、运行稳定等优点。完成矢量控制需要实时获取定子绕组三相电流信息[1-7]。在实际控制系统中通常采用安装至少两个电流传感器来实现相电流的检测,多个传感器增加了控制器体积,同时也增加了系统成本。因此,有学者提出了基于直流母线电流传感器的电流重构技术[8]。一方面可以控制整个系统的体积及成本;另一方面可在相电流传感器发生故障时作为容错运行方案,从而满足高可靠性应用场景的需求。
通过在直流母线上安装一个电流传感器,根据不同开关状态可测得不同相电流,在一个脉宽调制(Pulse Width Modulation, PWM)周期内,假定相电流保持不变,在使用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)控制时,每个PWM控制周期都存在零电压矢量及两个非零电压矢量。在两个非零电压矢量作用时测得两相电流,再由三相电流之和为零计算出第三相电流值。
但由于完成电流采样需要非零电压矢量作用一定时间,而在扇区边缘处存在某一非零电压矢量作用时间过短,无法在此期间完成电流采样,在低调制比区间,两个非零电压矢量持续时间都过短,无法完成相电流重构。因此,传统SVPWM方法在扇区边缘及低调制比区间存在电流重构盲区。针对此问题,有学者使用了远端状态脉宽调制(Remote State Pulse Width Modulation, RSPWM)的方法进行控制[9],这种方法能够在低调制比区间实现电流的准确重构,但RSPWM工作区域较小,使得电压利用率很低。文献[10]提出了一种直流母线采样电压空间矢量脉冲宽度调制方法,通过插入测量矢量和对应的补偿矢量扩大电流重构区间。文献[11]提出了一种互补非零矢量脉宽调制的方法,通过在中调制比区间添加互补非零矢量使得采样矢量持续时间延长,拓展了电流重构区间。文献[12-14]提出了脉冲移位法,通过平移PWM波形进行修整,延长对应电压矢量作用时间,但是这种方法仍难以实现很高的电压利用率,且在一些控制芯片上难以应用。文献[15]对脉冲移位法进行了过调制控制,提高了电压利用率。文献[16]提出了一种基于两步预测控制的三态脉宽调制方法,减小了电流重构盲区。文献[17]针对T型三电平逆变器,提出了合成空间矢量脉宽调制策略,扩大了电流可测区域。文献[9-17]都是采用尽可能长的有效矢量作用时间,扩大可测区域。有学者采用脉冲插入法[18-20],即在SVPWM周期后插入三个非零电压矢量用于电流的测量,但这种方法在每个周期增加了一次开关次数,增大了开关损耗,且由于插入矢量和为零,延长了PWM周期时间,导致电压利用率较低。有学者提出了当采样时间不足导致无法进行相电流重构时,假设相电流为正弦曲线,利用观测器和正弦曲线的拟合重构出相电流[21-22],但当假设相电流为正弦波的前提不成立时,此类方法就失效了。还有学者提出了使用电流状态观测器的方法来估计三相电流的方 法[23-25],理论上状态观测器能做到全区域的测量,但实际中状态观测器的控制结构复杂,却对系统参数模型敏感,难以实现。
本文在分析了仅在直流母线安装一个电流传感器的相电流重构原理及在重构测量盲区产生的原因的基础上提出了使用动态零矢量脉宽调制(Active Zero State Pulse Width Modulation, AZSPWM)代替SVPWM的控制方式,使用插入矢量的方法解决了AZSPWM在低电压调制比区间的测量盲区问题。本方法可以实现电压的高电压利用率,并且能减小开关损耗。
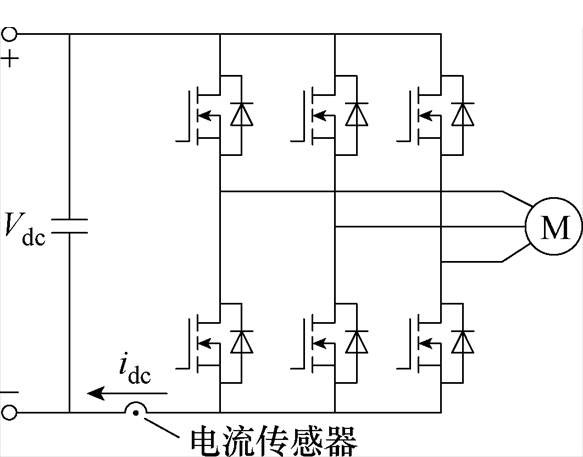
典型的三相电压源型逆变器如图1所示,直流母线电压为Vdc的三相逆变器中,每相的开关状态有两个选择,因此,三相逆变器共有八种不同的开关状态。基于直流母线电流传感器的电流测量方法是根据不同开关状态下,直流母线电流与相电流有相应的对应关系,在每个不同的功率器件开关状态得到不同相电流信息。采用开关函数Sx=1(x= A, B, C)代表对应相上桥臂导通;开关函数Sx=0代表对应相下桥臂导通,逆变器不同相的开关状态共有八种组合,对应如图2所示逆变器输出电压矢量中的八个基本电压矢量。直流母线电流与相电流在不同基本电压矢量Vi(SA, SB, SC)的对应关系见 表1。
图1 三相电压源逆变器
Fig.1 Three-phase voltage source inverter
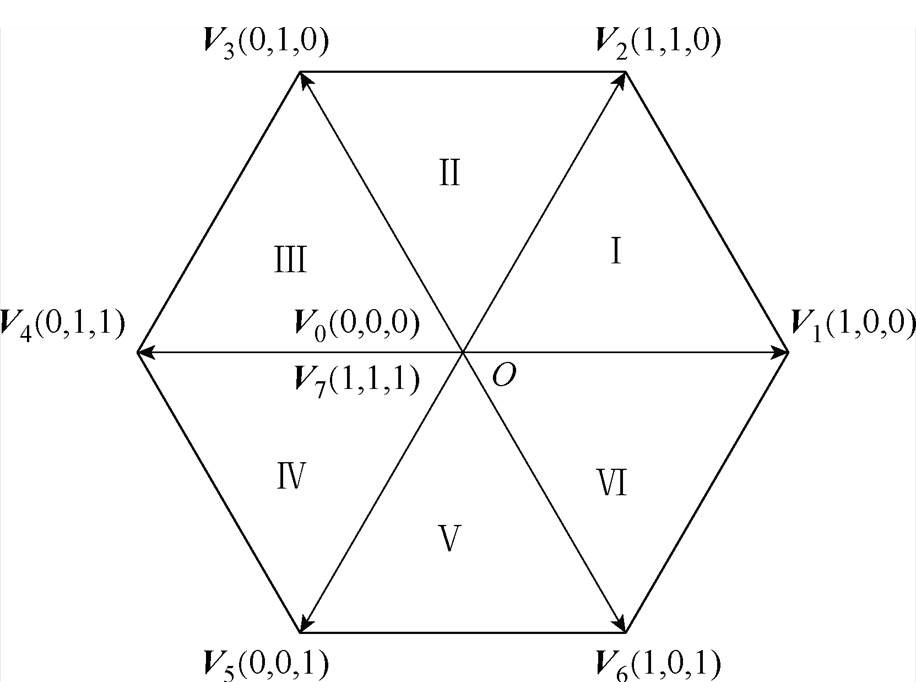
图2 逆变器输出电压矢量
Fig.2 Inverter output voltage vector
表1 不同电压矢量下直流母线电流
Tab.1 DC-bus current corresponding to different voltage vectors
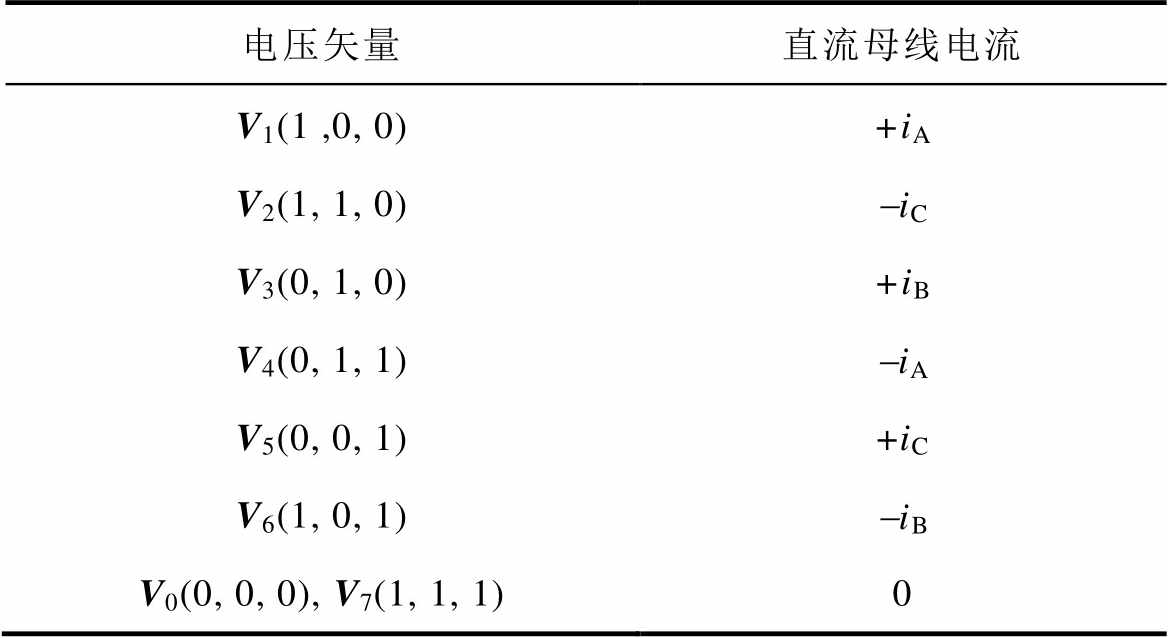
电压矢量直流母线电流 V1(1 ,0, 0)+iA V2(1, 1, 0)-iC V3(0, 1, 0)+iB V4(0, 1, 1)-iA V5(0, 0, 1)+iC V6(1, 0, 1)-iB V0(0, 0, 0), V7(1, 1, 1)0
SVPWM下理想电流波形如图3所示,在传统SVPWM控制方法中,每个周期内电压矢量由零电压矢量及两个相邻非零电压矢量组合而成,在两个非零电压矢量作用时间内,通过采集母线电流可得两相电流信息,再通过三相电流之和进而可获得三相电流信息。
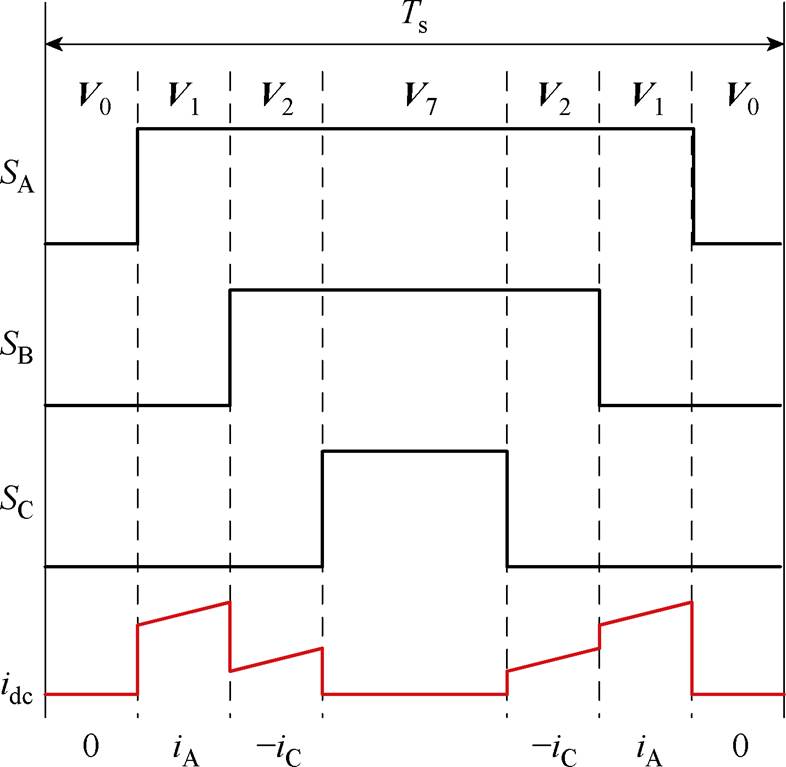
图3 SVPWM下理想电流波形
Fig.3 Ideal current waveform under SVPWM
理想电流与实际电流对比如图4所示,实线为理想情况下电流,虚线为实际电流。存在为防止上下管直通的死区时间Td,开关管导通时间Ton,由于开关管寄生参数、电机电感等影响,电流需要一定时间才能达到稳态的延时时间Tset及AD采样所需时间TAD。因此为成功测量得到对应电流,要求电压矢量作用的最小时间Tmin需满足
 (1)
(1)
式中,Ts为逆变器开关周期;D为电压矢量所需最短持续时间与开关周期的比值。
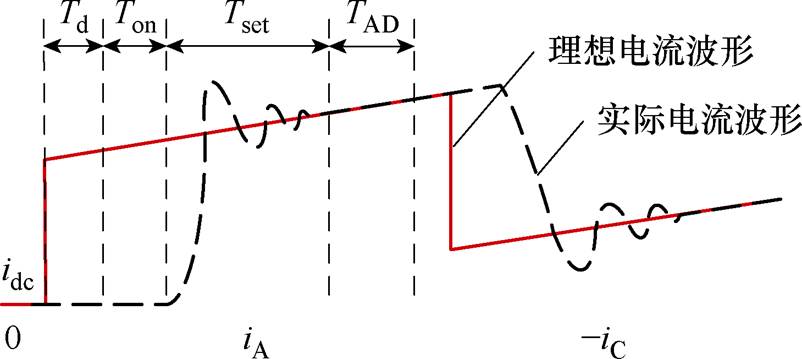
图4 理想电流与实际电流对比
Fig.4 Comparison of ideal current and actual current
在SVPWM中,每个扇区的边缘区域存在非零电压矢量持续时间过短,电流采样无法准确完成,导致无法成功测量的问题,在低调制比区域,两个非零电压矢量作用时间都较短,无法得到任何一相电流信息。可以得到如图5所示的使用七段式SVPWM控制下的电压空间矢量的电流重构盲区。深色测量盲区Ⅰ为无法得到任何一相电流的低调制比盲区,浅色测量盲区Ⅱ为仅可得到一相电流的扇区边界测量盲区,白色为可测两相电流的可测区域。
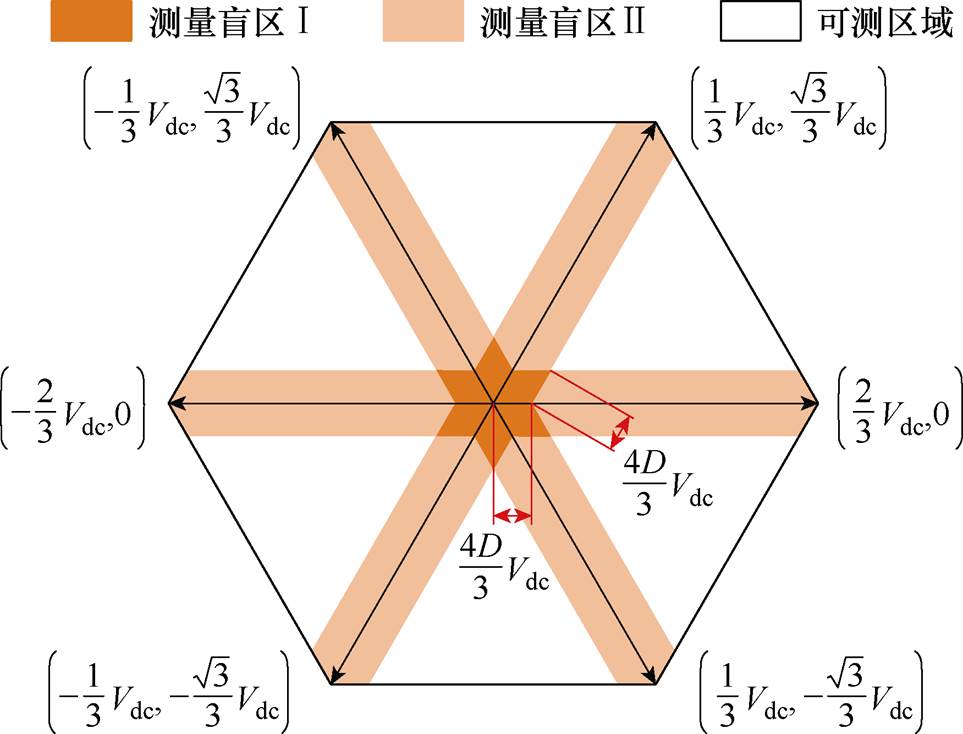
图5 SVPWM控制下电压空间电流盲区划分
Fig.5 Blind zone of current reconstruction in voltage space under SVPWM control
AZSPWM通过非零电压矢量来代替零电压矢量,通过对应扇区中两个基本非零电压矢量和其中一个非零基本电压矢量相反的基本电压矢量组合来代替零矢量的作用。AZSPWM工作原理如图6所示。
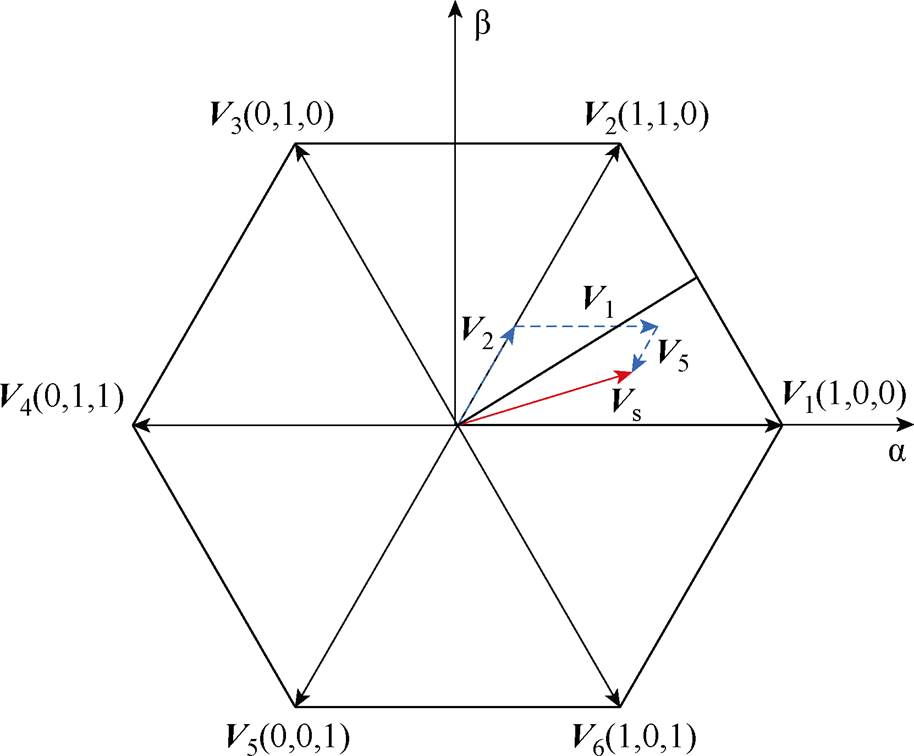
图6 AZSPWM工作原理
Fig.6 Working principle of AZSPWM
以图6为例,采用V1、V2、V5三个基本电压矢量,在ab 坐标系下其给定电压Vs=[Va Vb]T与三个有效电压矢量之间的关系满足
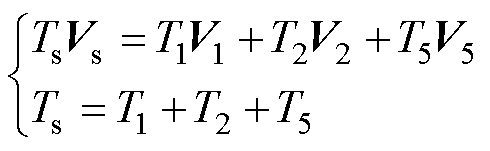 (2)
(2)
求解可得V1、V2、V5三个矢量的作用时间T1、T2、T5为
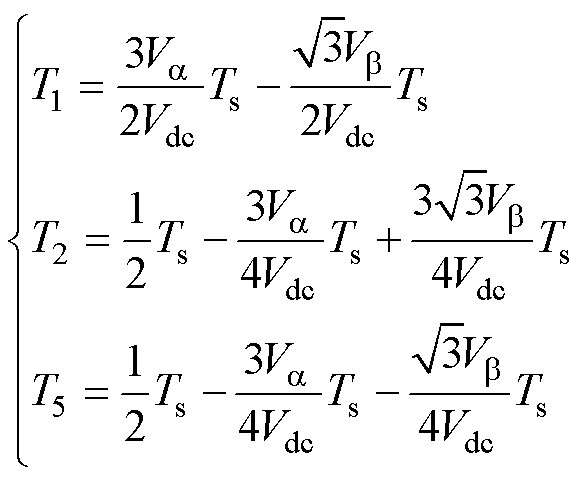 (3)
(3)
式中,Va、Vb 分别为期望电压在a 轴和b 轴的分量。
V2、V5作用期间都可测得C相电流,因此,为重构出三相电流,要求T1>Tmin测得A相电流,T2、T5至少一项大于Tmin。据此可得仅使用V1、V2、V5三个基本电压矢量的AZSPWM工作模式下有效工作区域如图7所示,测量盲区Ⅱ为仅可测量得到一相的测量盲区,白色区域为可测区域,阴影的不可达区域为仅用V1、V2、V5三个基本电压矢量不可实现的电压区间。
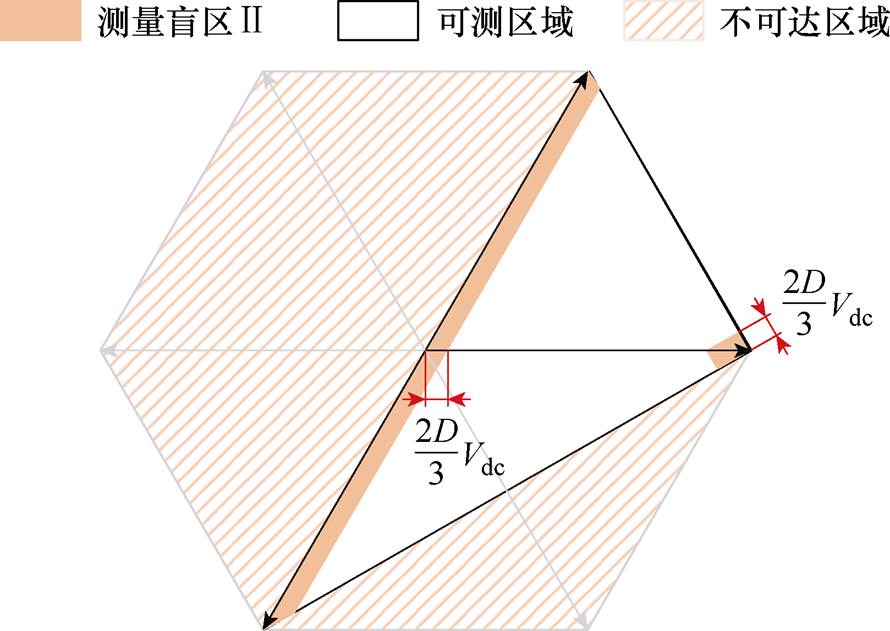
图7 AZSPWM工作区域
Fig.7 Working area of AZSPWM
由图7可以看出,在可实现的三角形区域左侧存在电流重构盲区,无法成功采集到A相电流信息,因此直接使用AZSPWM会在低调制比区间内无法完成相电流重构。对于此,可加入持续时间为
T4=Tmin的电压矢量V4合成所需电压矢量,应满足
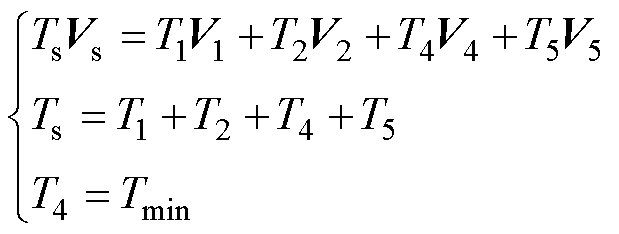 (4)
(4)
求解得到四个矢量作用时间为
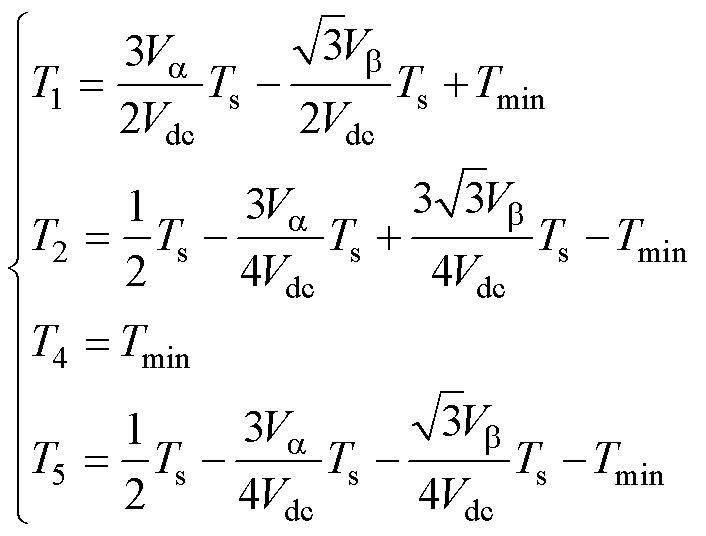 (5)
(5)
此时,AZSPWM的有效工作区域如图8所示。插入矢量后的AZSPWM可实现区域仍为一直角三角形,且仅在直角处存在测量盲区。但是由于插入持续时间为Tmin的电压矢量,使得可实现电压峰值较低,电压利用率较低。因此,在高调制比区间采用三个基本电压矢量的AZSPWM控制方法,在低调制比区间采用插入一个基本电压矢量的AZSPWM控制方法,工作区域如图9所示,将整个电压矢量区间分为12个子区间。整个电压矢量空间内不存在不可达区域,在没有测量盲区的情况下,可实现最
大 的基波电压幅值,可将电压利用率提高至
的基波电压幅值,可将电压利用率提高至 ,当
,当 时,可达到100%电压利用率。
时,可达到100%电压利用率。
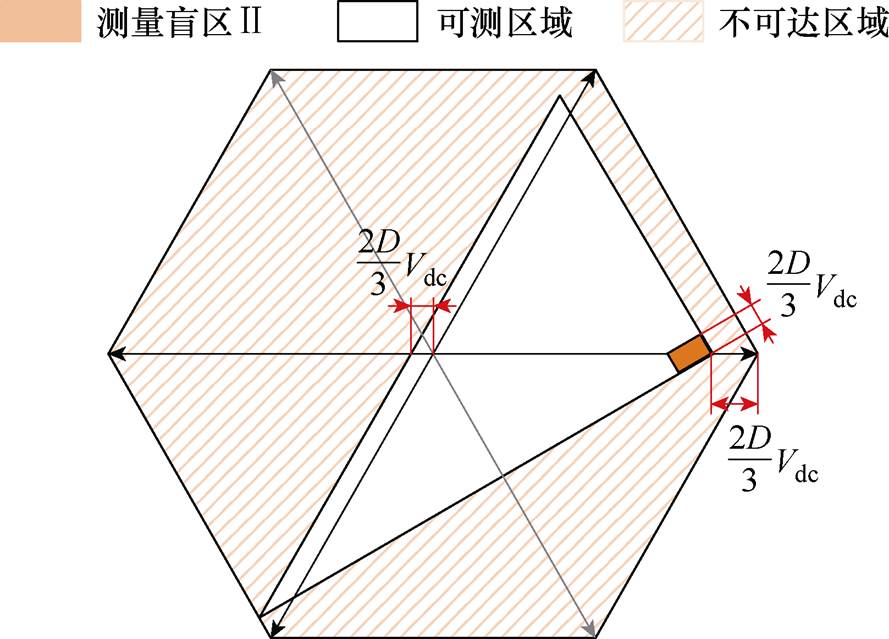
图8 插入矢量的AZSPWM工作区域
Fig.8 Working area of vector pulse interpolation AZSPWM
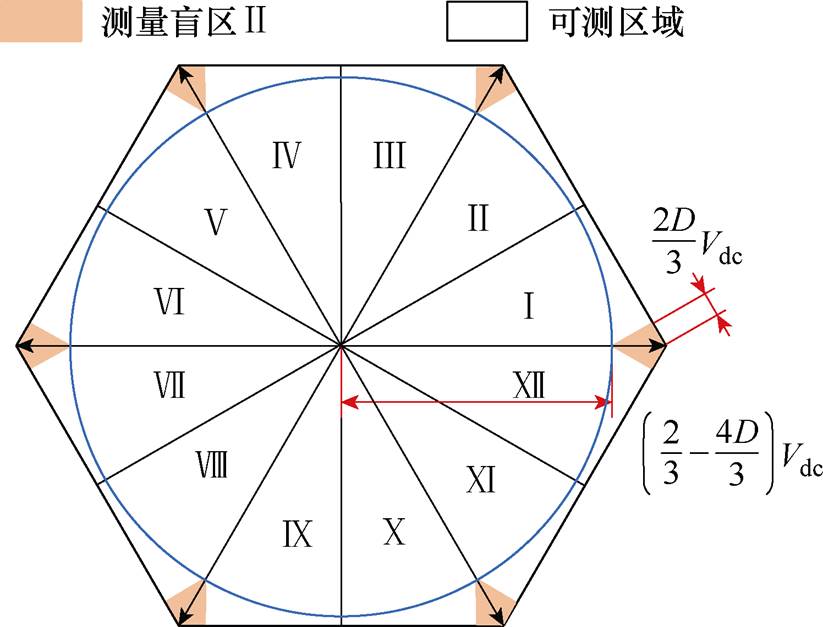
图9 AZSPWM工作区域及区间划分
Fig.9 Working area and sector division in AZSPWM
使用AZSPWM不同区域和对应基本电压矢量及开关顺序见表2,电压矢量为低调制比区插入持续时间为Tmin的基本矢量。此方法可保证每个开关周期内各相开关最多开关一次,且在2n与2n+1的扇区切换时,前一个开关周期最后一个开关状态和后一个开关周期第一个开关状态为同一开关状态,开关状态连续可减小一相的开关次数,减小开关损耗,但同一开关状态持续时间较长会引起电流波形畸变。
表2 不同区间的基本矢量及开关顺序
Tab.2 Basic vector used in different region and their order
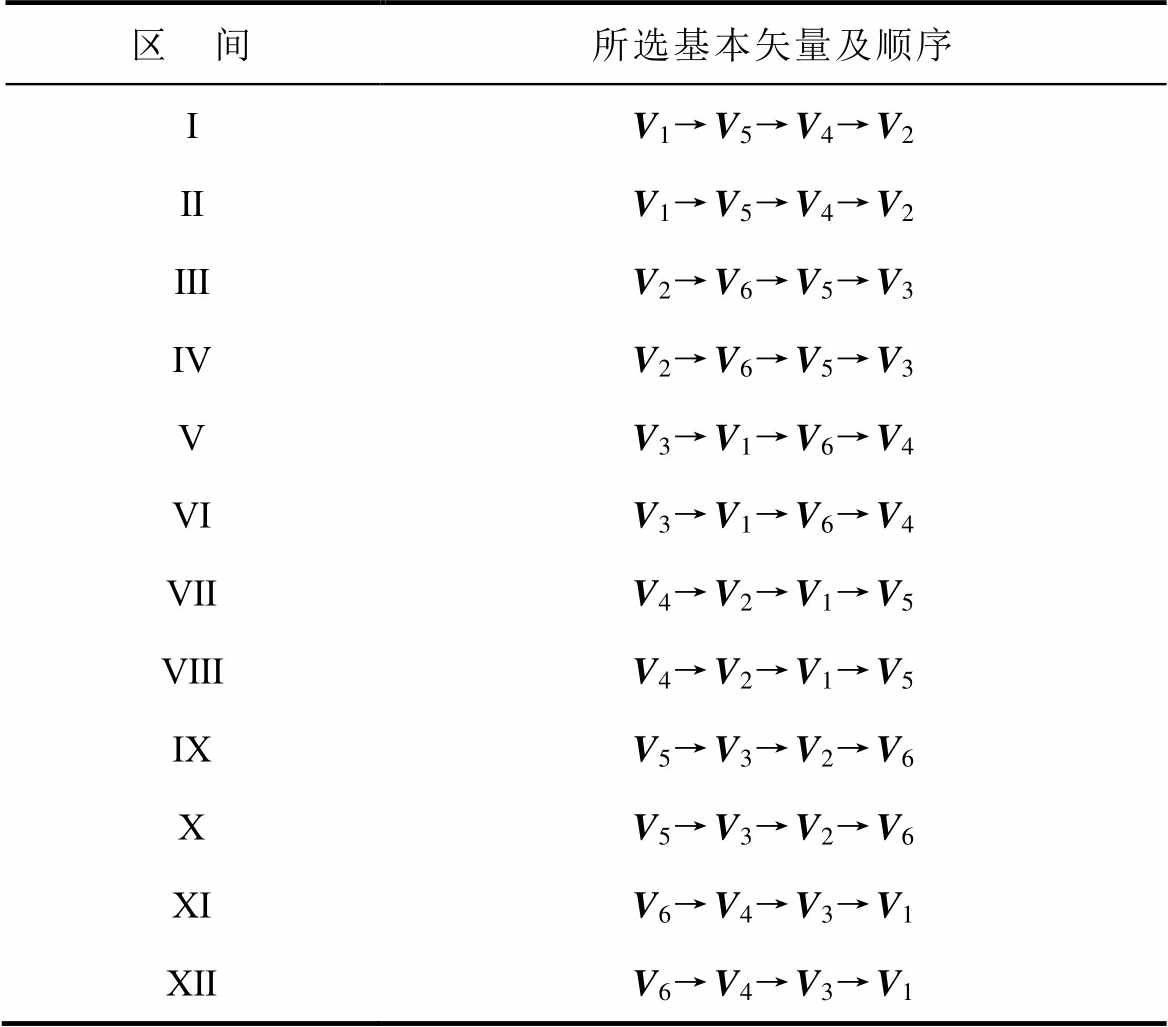
区 间所选基本矢量及顺序 ⅠV1→V5→V4→V2 ⅡV1→V5→V4→V2 ⅢV2→V6→V5→V3 ⅣV2→V6→V5→V3 ⅤV3→V1→V6→V4 ⅥV3→V1→V6→V4 ⅦV4→V2→V1→V5 ⅧV4→V2→V1→V5 ⅨV5→V3→V2→V6 ⅩV5→V3→V2→V6 ⅪV6→V4→V3→V1 ⅫV6→V4→V3→V1
本文利用Matlab/Simulink对上述PWM控制方法进行了仿真分析,验证了本文所提PWM方式在直流母线单电流传感器下的有效性。仿真采用的电机参数见表3。系统控制框图如图10所示。
表3 仿真模型参数
Tab.3 Parameters of simulation model
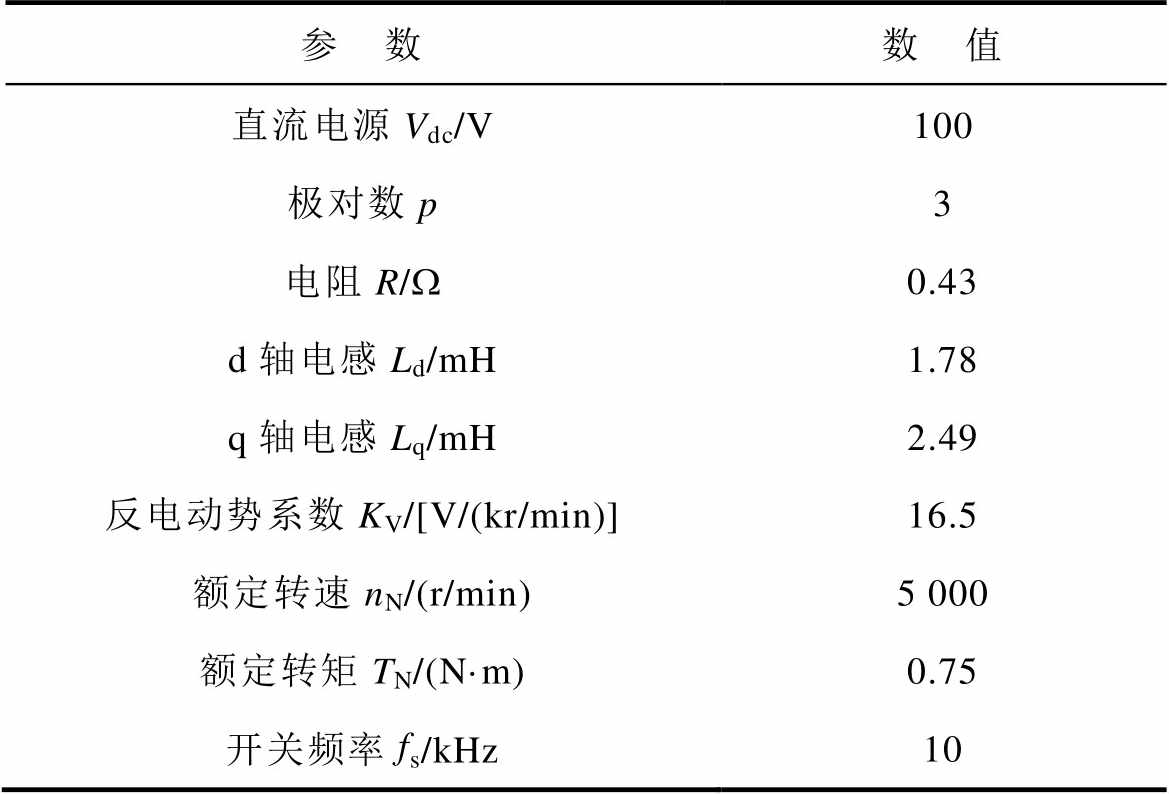
参 数数 值 直流电源Vdc/V100 极对数p3 电阻R/W0.43 d轴电感Ld/mH1.78 q轴电感Lq/mH2.49 反电动势系数KV/[V/(kr/min)]16.5 额定转速nN/(r/min)5 000 额定转矩TN/(N·m)0.75 开关频率fs/kHz10
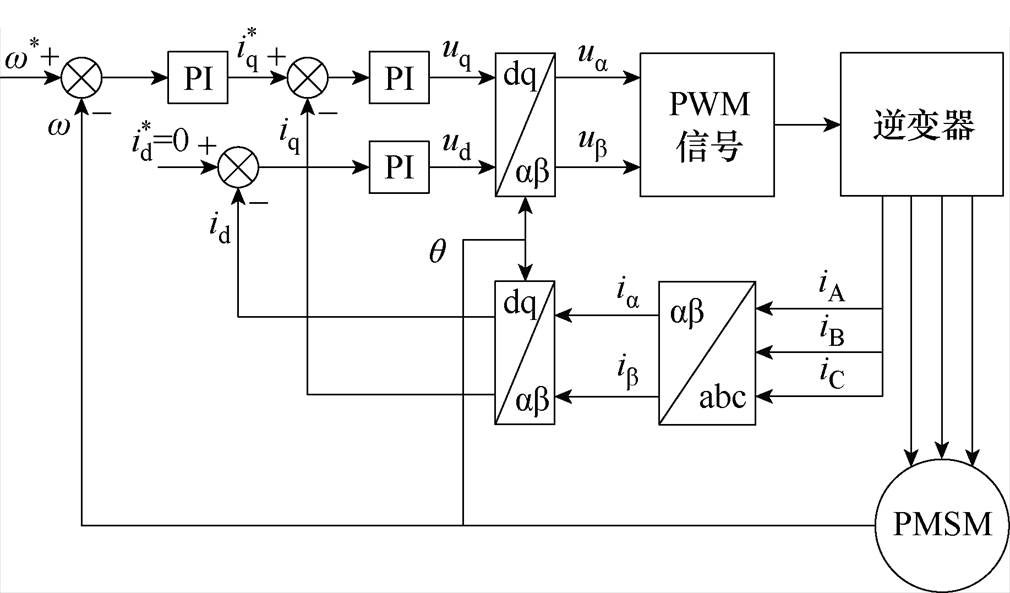
图10 永磁同步电机控制框图
Fig.10 Control block diagram for PMSM
对以下四个工况进行仿真分析:
(1)工况Ⅰ:300 r/min转速,0.27 N·m转矩,基波电流峰值为2 A,低于10%电压利用率的低电压调制比区间。
(2)工况Ⅱ:5 000 r/min转速,0.75 N·m转矩,基波电流峰值为5.5 A,90%电压利用率的高电压调制比区间。
(3)工况Ⅲ:2 000 r/min转速,0.4 N·m转矩,突加至0.75 N·m转矩负载,由插入矢量的AZSPWM控制转换为AZSPWM控制(实验和仿真重新做一下)。
(4)工况Ⅳ:恒定0.4 N·m转矩负载下,2 000 r/min提速至3 000 r/min,由插入矢量的AZSPWM控制转换为AZSPWM控制。
仿真结果如图11~图14所示。
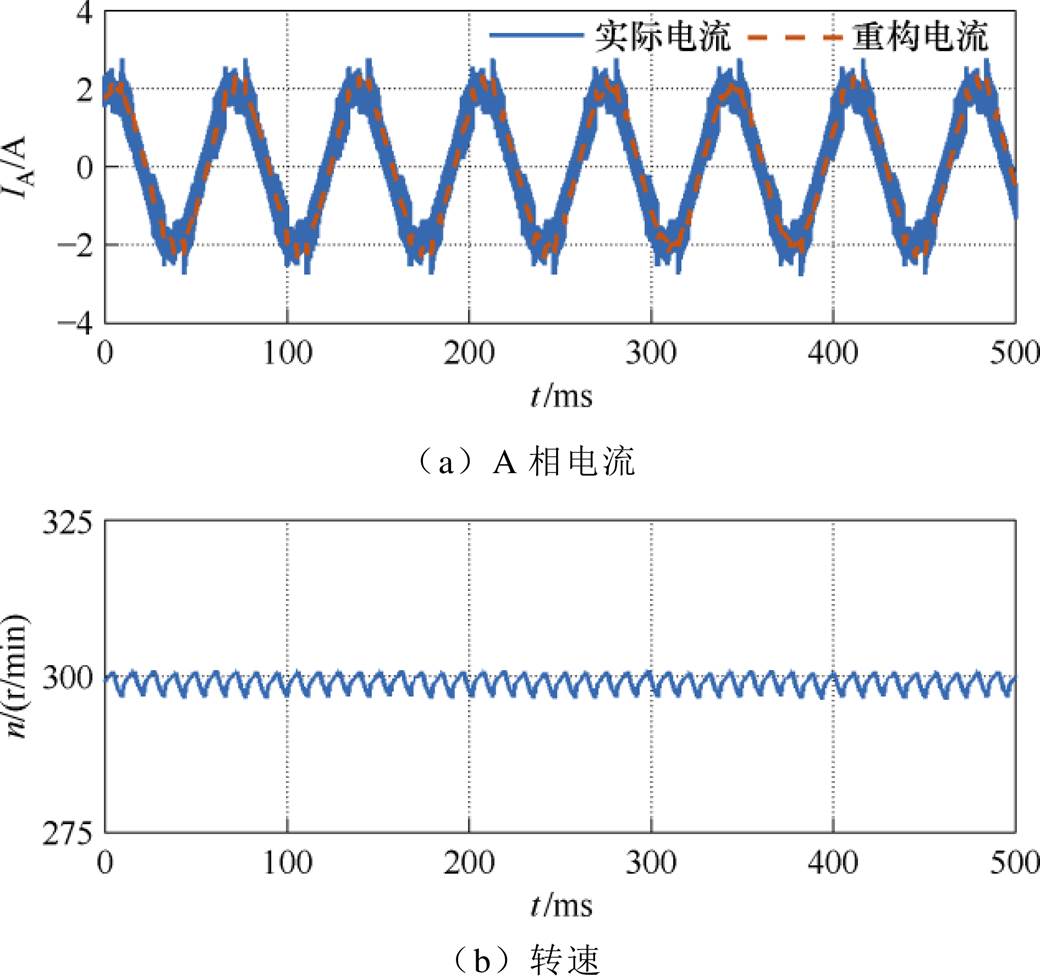
图11 工况Ⅰ仿真波形
Fig.11 Simulation waveforms of Case Ⅰ
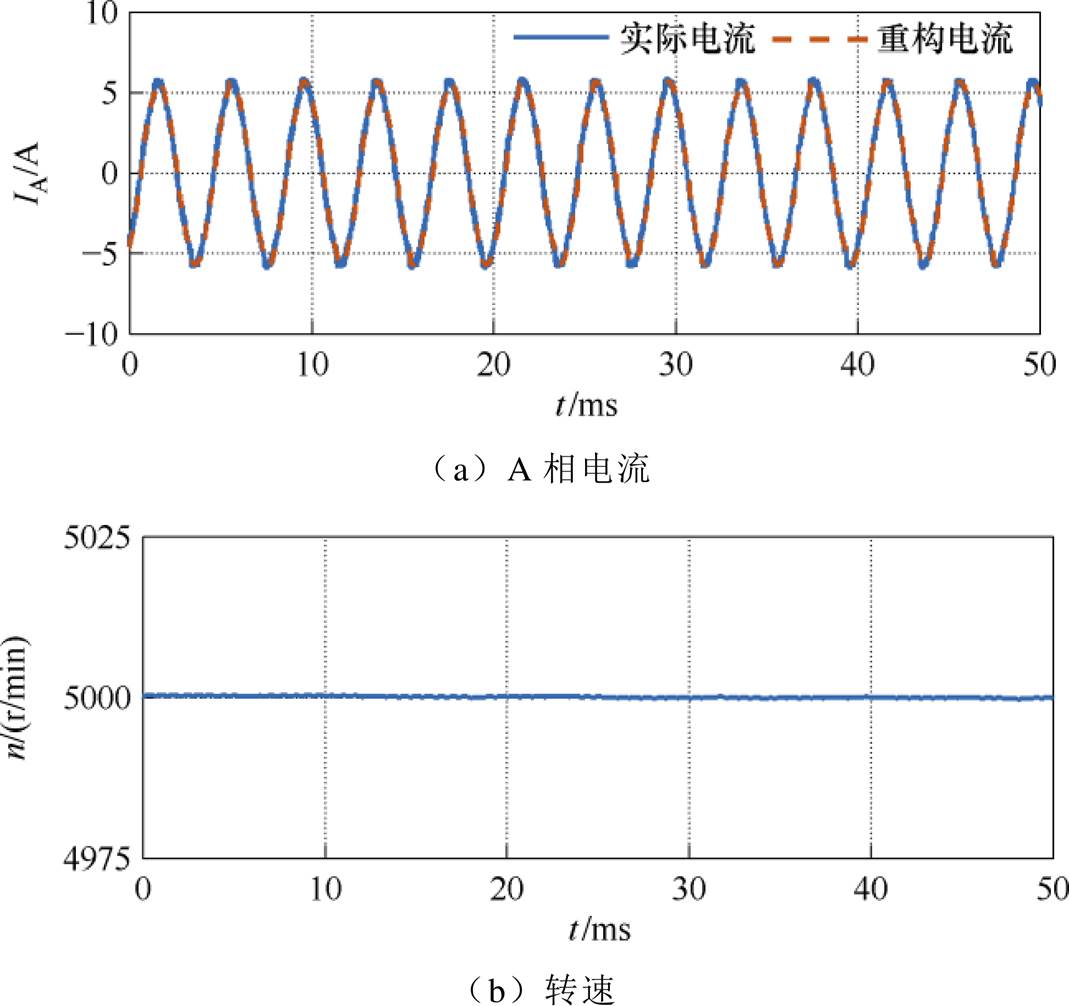
图12 工况Ⅱ仿真波形
Fig.12 Simulation waveforms of Case Ⅱ
图11和图12分别为电机在低电压利用率和高电压利用率稳态工作下的仿真结果。可以看出,通过本文所提方法在低电压利用率和高电压利用率区间都可以平稳工作,并且重构电流可以很好地跟随实际电流值,误差小于一个开关周期内的电流变化值。电流波形出现畸变是为了减小开关损耗在一些扇区切换区间开关连续引起的。
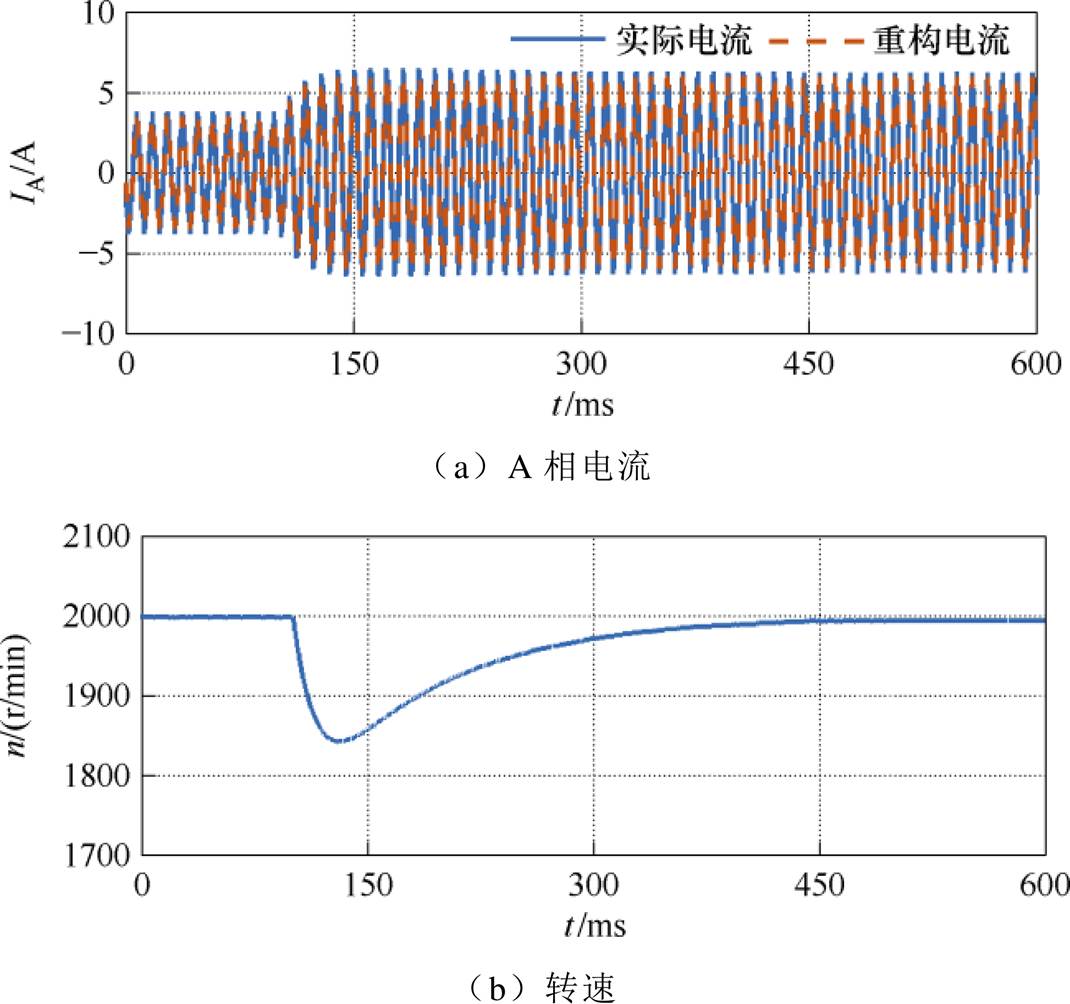
图13 工况Ⅲ仿真波形
Fig.13 Simulation waveforms of Case Ⅲ
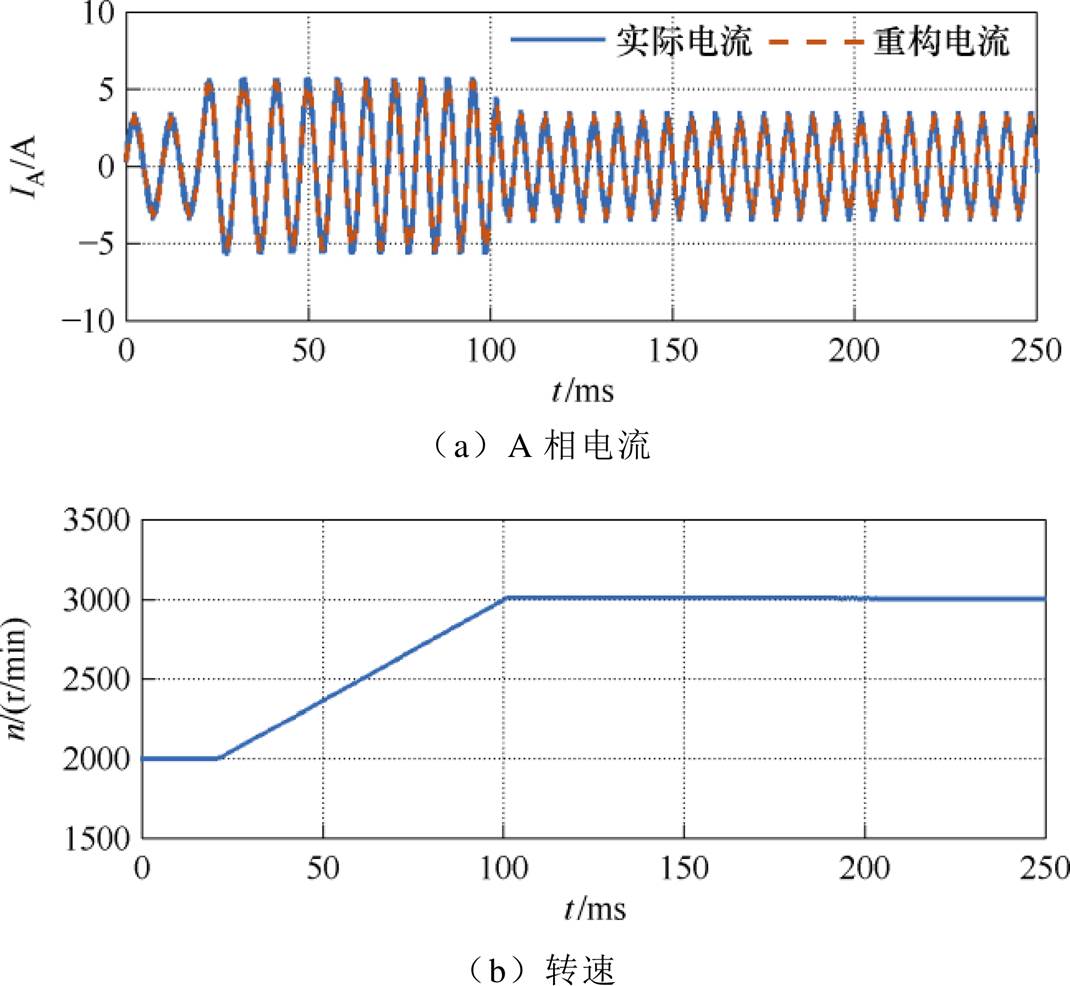
图14 工况Ⅳ仿真波形
Fig.14 Simulation waveforms of Case Ⅳ
图13为电机运行过程中突加转矩的仿真结果,电机经过一个转速跌落后重新回到期望转速,调速期间重构电流可以很好地跟随实际电流值。图14为电机在2 000 r/min下,采用插入矢量的AZSPWM的低调制比区间,加速至3 000 r/min,采用AZSPWM的高调制比区间的仿真结果。电机可以实现平稳调速,调速过程中重构电流可以很好地跟随实际电流值。利用本文所提方法可以实现电机稳态的平稳运行和很好的动态响应性能。
为验证本文所提方法的有效性,搭建了如图15所示的实验平台。使用STM32H743实现电机控制、PWM信号输出及ADC采样等功能,开关频率为10 kHz,实验平台中电流探头仅用作比较重构电流精度,而不作为电机控制反馈信号,电机参数见表3。本实验平台中死区时间Td=1 ms,导通延时Ton约为0.6 ms,振荡时间Tset约为3.5 ms,AD采样时间TAD约为2 ms,为保证电流稳定后采样,在开通信号发出8 ms后发出AD采样指令,因此Tmin约为10 ms,D=0.1,理论上可在无电流重构盲区下实现
 的电压利用率。
的电压利用率。
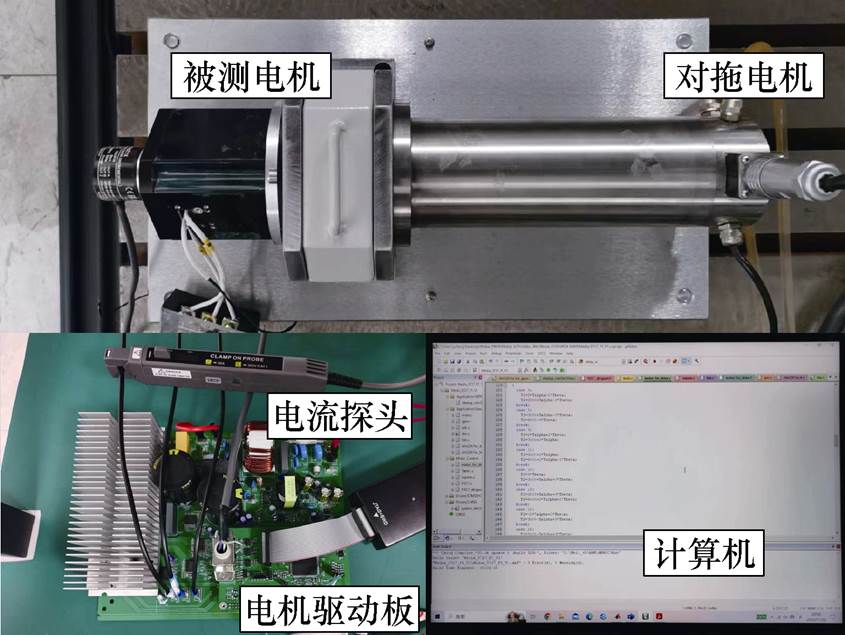
图15 实验平台
Fig.15 Platform of experiment
使用本实验平台在工况Ⅰ~Ⅳ的实验结果如图16~图19所示。
图16和图17分别为电机在低调制比区间采用插入矢量的AZSPWM控制方法和在高调制比区间采用AZSPWM控制方法的实验结果。可以看出,通过本文所提方法在低电压利用率和高电压利用率区间都可以平稳工作,同时重构电流可以很好地跟随实际电流。在实际控制系统中,由于在一个PWM周期内不同时刻分别对两相电流进行采样,而将重构出的三相电流作为下一个PWM周期的电流反馈值,因此重构电流相较于实际电流存在一个PWM周期的延迟。
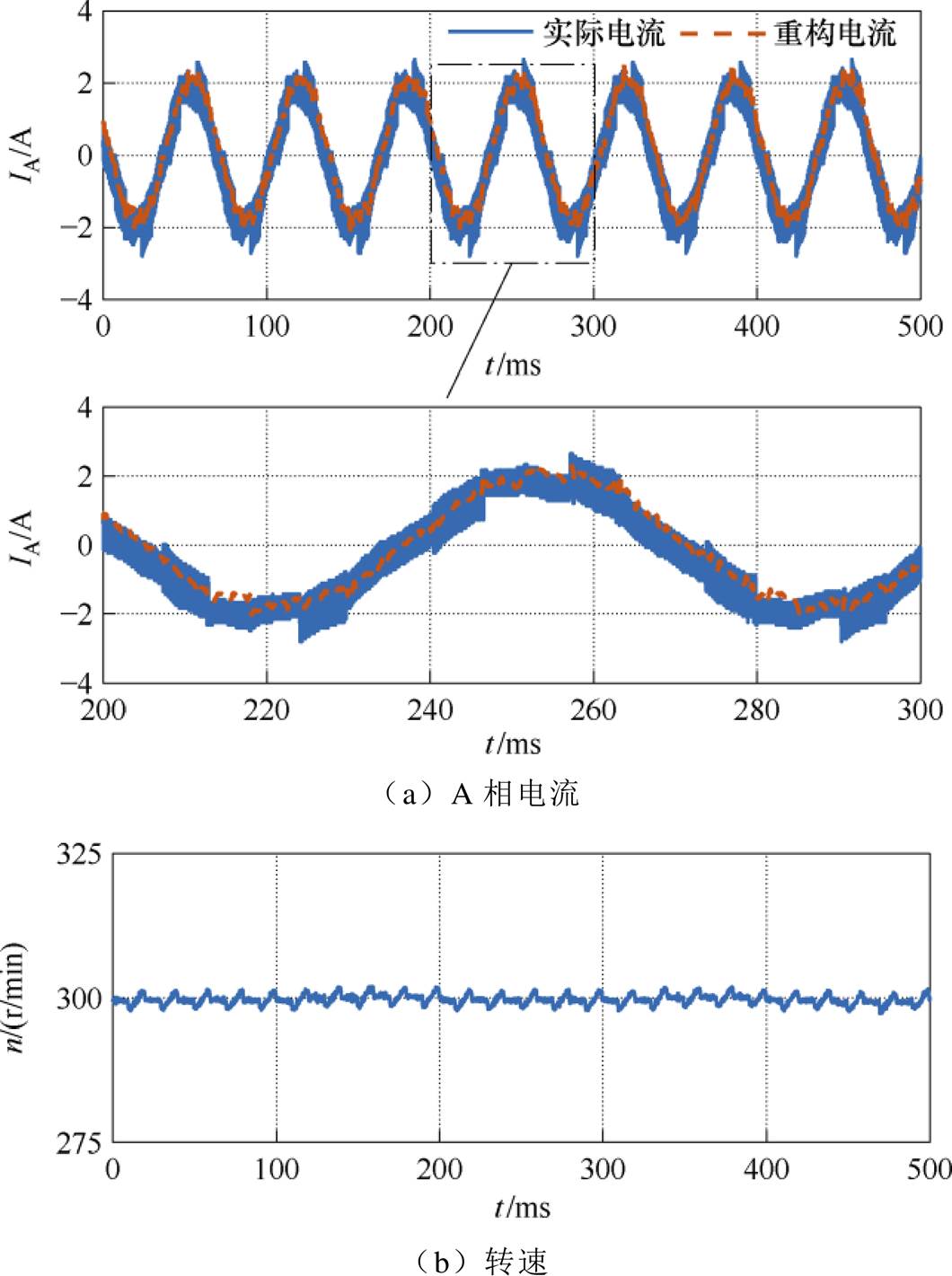
图16 工况Ⅰ实验波形
Fig.16 Experiment waveforms of Case Ⅰ
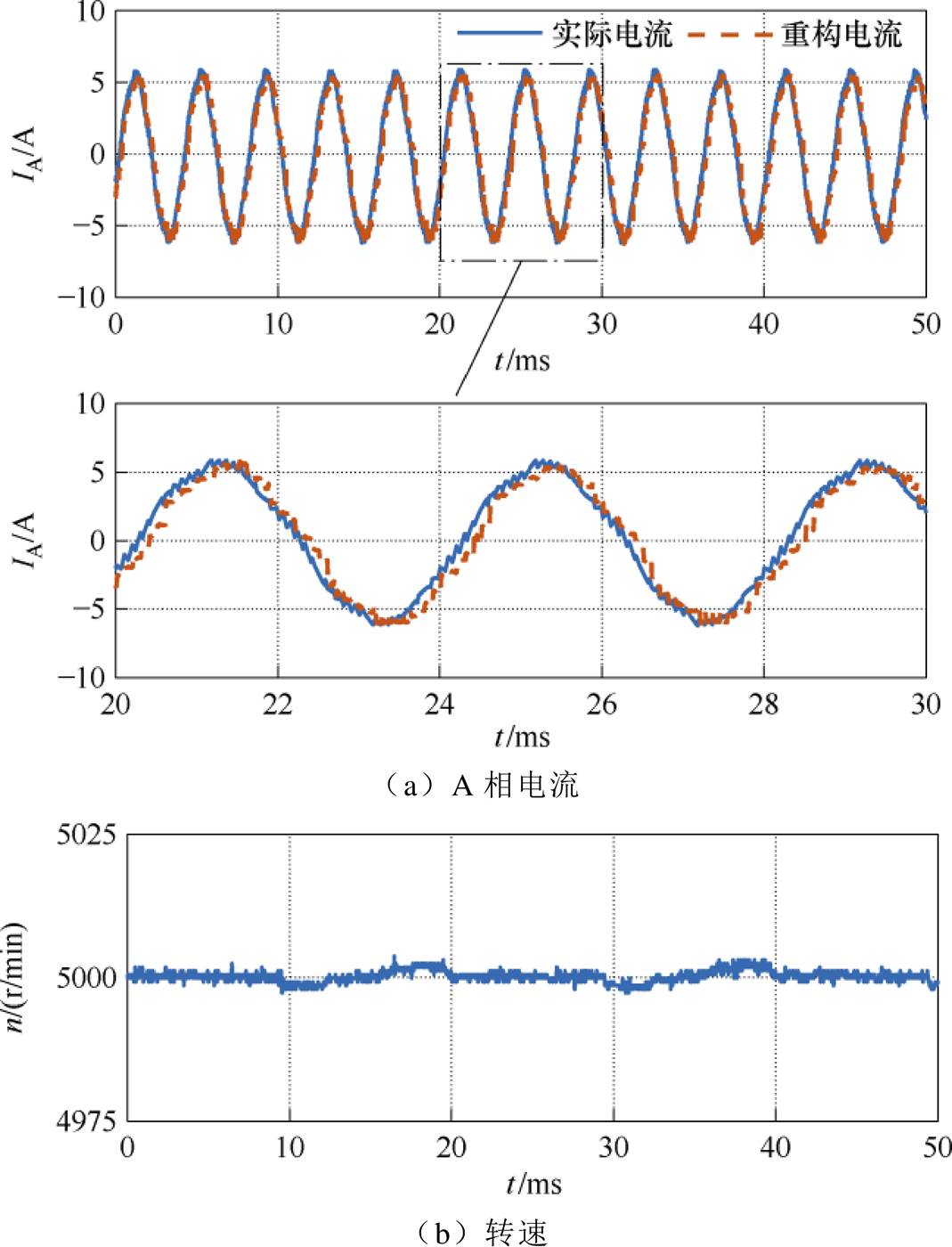
图17 工况Ⅱ实验波形
Fig.17 Experiment waveforms of Case Ⅱ
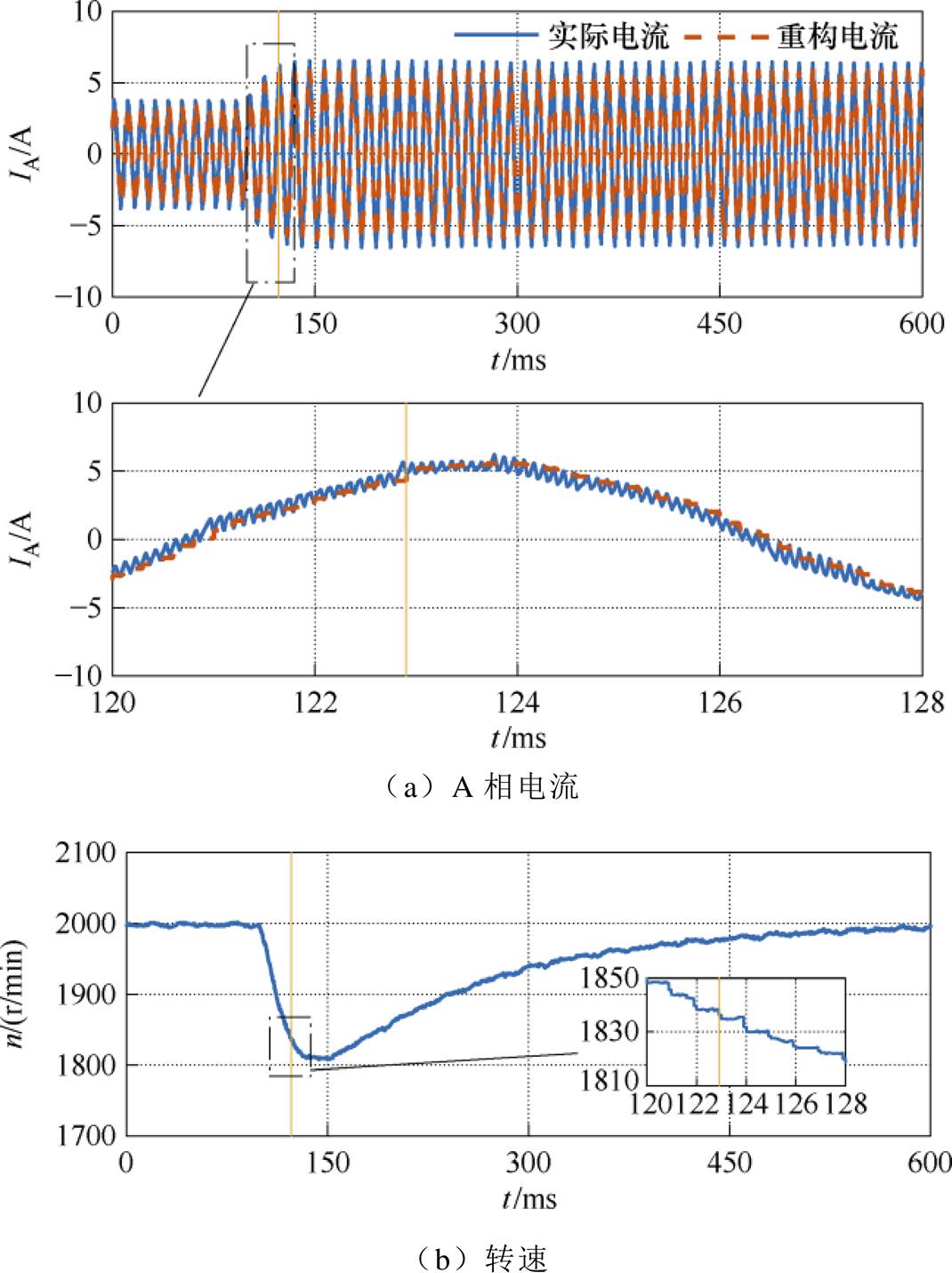
图18 工况Ⅲ实验波形
Fig.18 Experiment waveforms of Case Ⅲ
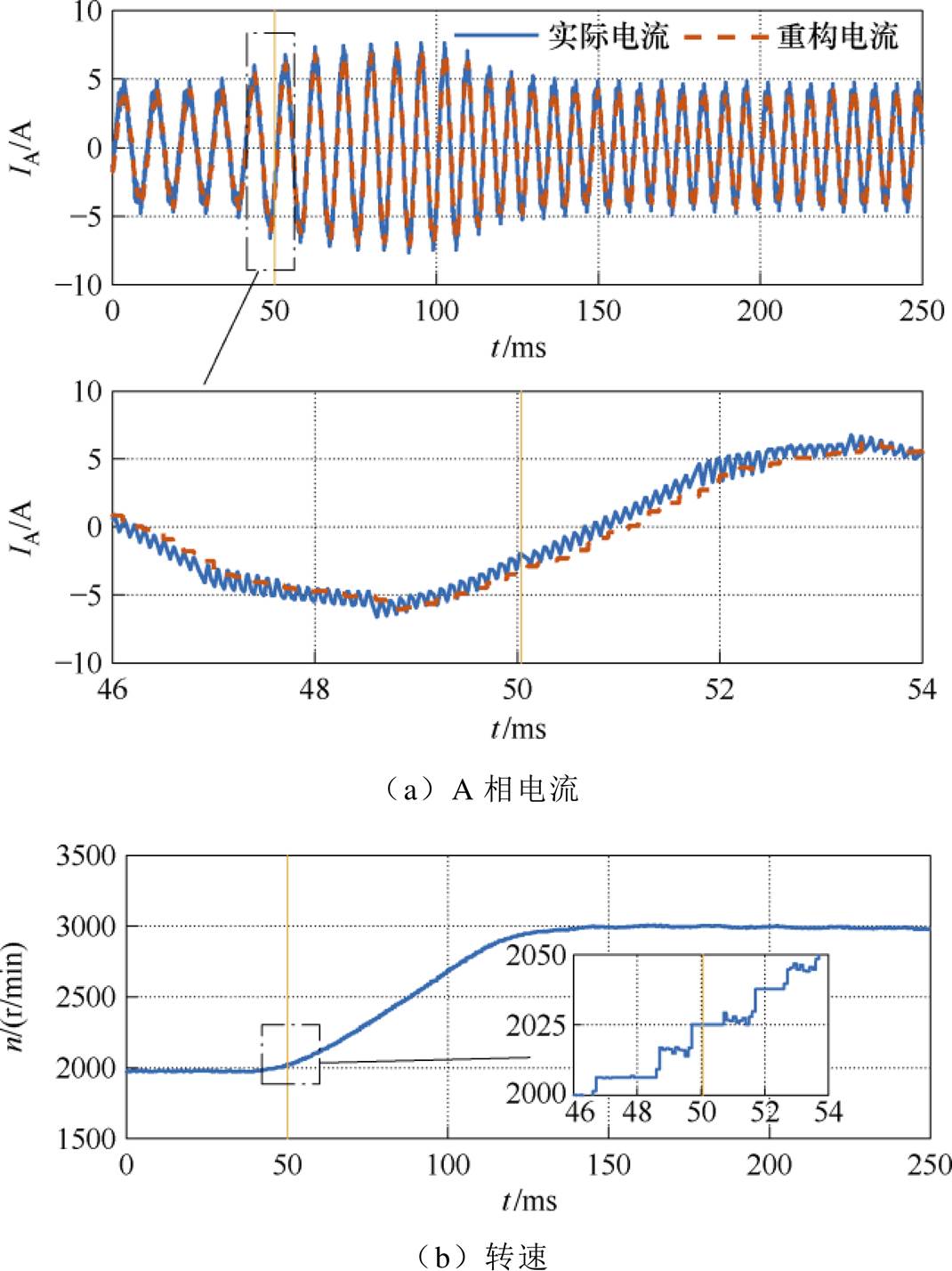
图19 工况Ⅳ实验波形
Fig.19 Experiment waveforms of Case Ⅳ
图18为电机平稳运行时,突加负载转矩的实验结果。实验中,电机经过一个转速跌落后重新回到期望转速值,在122.9 ms时,即图中黄色竖线时刻,从插入矢量的AZSPWM切换至AZSPWM控制,电流及转速波形平滑无明显跳变。
本文采用电流误差的标准差来衡量重构精度,计算公式为
 (6)
(6)
式中,Tf为电流基波周期;iact为实际电流;ire为重构电流。加载之前重构电流与实际电流误差的标准差为0.436 A,加载后电流误差的标准差为0.529 A。
图19为电机在恒定负载下的调速实验结果,在50.1 ms时,即图中黄色竖线时刻,从插入矢量的AZSPWM切换至AZSPWM控制,电流及转速波形同样平滑无明显跳变,不同PWM控制方法间可以平滑切换。加速前在2 000 r/min转速下,标准差为0.436 A,加速至3 000 r/min后标准差为0.519 A。
随着转矩的增大和转速的提升,重构电流误差的标准差会增大,主要是由重构电流滞后实际电流一个PWM周期引起的。这是因为在式(6)中,一个开关周期内,ire为恒定值,iact为变化值,而实际中重构电流滞后实际电流一个PWM周期,因此当转速或转矩提高后,一个PWM周期内的电流变化量增大,使得重构电流误差的标准差提高。若考虑到滞后的影响,在2 000 r/min下,加载前后的标准差分别为0.345 A和0.341 A,在恒定负载下,提速前后标准差分别为0.346 A和0.374 A,可以看出,同样转速下,不同负载几乎不影响重构电流精度,转速变化对电流精度略有影响,这是因为转速提高使得电压利用率提高显著,用以合成零矢量的相反电压矢量作用时间减小,使得有效电压矢量作用时间增长,实际电流在一个PWM周期内变化量增大,重构电流误差标准差增大。
使用本文所提方法可以保证系统较好的动态性能,在两种不同的PWM控制方式间可以平滑切换,且在动态过程中重构电流可以很好地跟随实际电流值。可以看出,实验结果与仿真结果一致,验证了本文所提方法可以保证系统良好的稳态性能及动态响应。
图20和图21分别为工况Ⅰ和工况Ⅱ的稳态下实验的实际电流波形谐波分析。通过傅里叶分析可以看出,由于AZSPWM使用非零电压矢量合成达到零矢量效果,因此会引进较大的开关次附近谐波。同时,为减小开关损耗,在2n和2n+1扇区切换时,前一开关周期最后一个开关状态与后一开关周期第一个开关状态相同。同一开关状态连续持续时间较长,因此在此处,电流波形存在一定的畸变。在电机低速运行时,由于反电动势较低,这一现象尤其明显。可以通过改变开关顺序减小电流畸变,但会增大开关损耗。
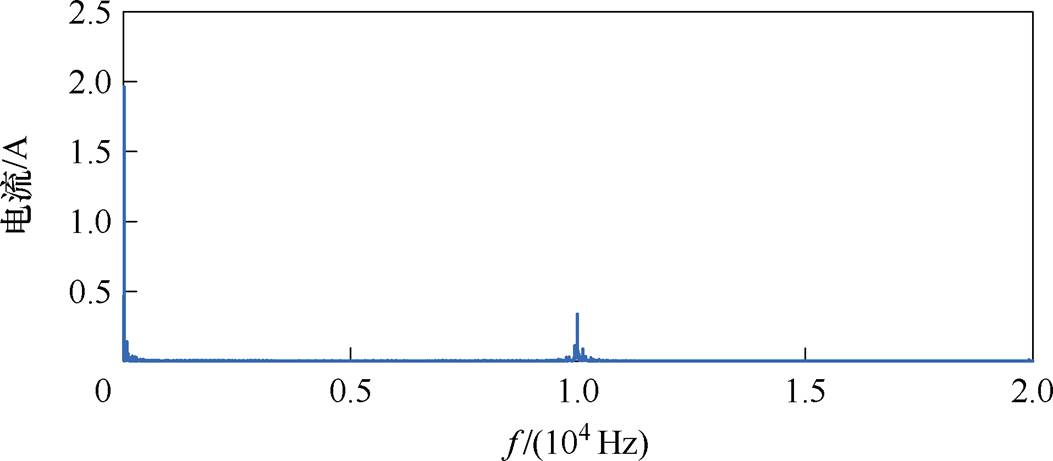
图20 工况Ⅰ下A相实际电流波形谐波分析
Fig.20 Harmonic analysis of A-phase current waveform of Case Ⅰ
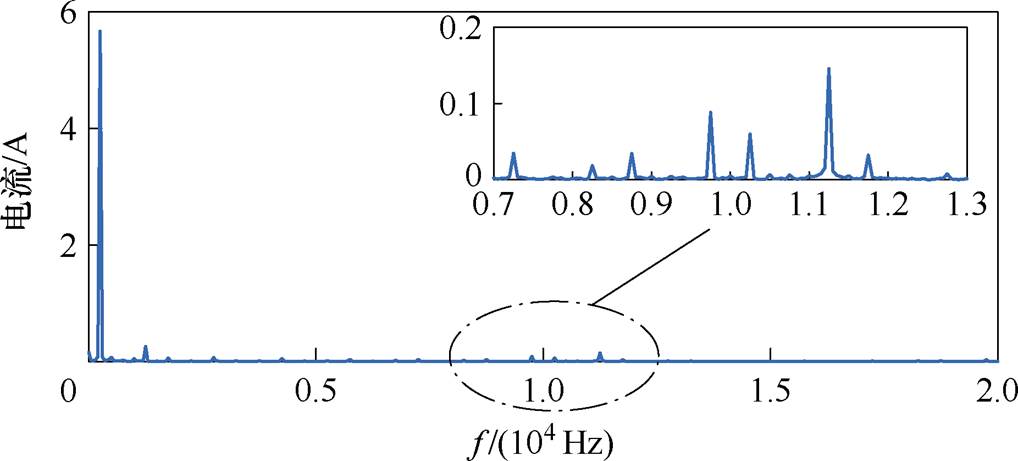
图21 工况Ⅱ下A相实际电流波形谐波分析
Fig.21 Harmonic analysis of A-phase current waveform of Case Ⅱ
本文对仅在直流母线安装一个电流传感器的三相电压型逆变器的相电流重构问题进行了研究分析,针对采用传统SVPWM控制方法存在电流重构盲区的问题,提出了采用AZSPWM的控制方法代替SVPWM控制方法,并使用插入矢量的方法解决AZSPWM在低调制比区间的测量盲区问题,并且通过优化开关顺序来减少开关损耗。通过仿真和实验,得出以下结论:
1)采用本方法,可以在低调制比区间和高调制比区间稳定运行,在本文实验平台中可以在无电流重构盲区下实现92.4%的电压利用率。
2)重构电流与实际电流误差小于电流在一个PWM周期内波动值,在实际应用中,重构电流滞后实际电流一个PWM周期。
3)实际电流谐波主要分布在开关次频率附近,不同负载对重构电流精度几乎无影响,转速变化对重构电流精度略有影响。
参考文献
[1] 申永鹏, 刘迪, 梁伟华, 等. 三相桥式逆变电路电流检测方法综述[J]. 电工技术学报, 2023, 38(2): 465-484.
Shen Yongpeng, Liu Di, Liang Weihua, et al. Review of current detection methods for three-phase bridge inverter circuits[J]. Transactions of China Elec- trotechnical Society, 2023, 38(2): 465-484.
[2] 张开继, 张国强, 李宇欣, 等. 基于滑动平均滤波的永磁电机无位置传感器控制策略[J]. 电气工程学报, 2021, 16(4): 93-100.
Zhang Kaiji, Zhang Guoqiang, Li Yuxin, et al. Sensorless control strategy of permanent magnet motor based on moving average filtering[J]. Journal of Electrical Engineering, 2021, 16(4): 93-100.
[3] 王杰, 周立, 苏美霞, 等. 基于模糊控制的自适应超螺旋滑模观测器无传感器控制[J]. 电气工程学报, 2023, 18(1): 32-42.
Wang Jie, Zhou Li, Su Meixia, et al. Sensorless control of adaptive super-twisting sliding mode observer based on fuzzy control[J]. Journal of Elec- trical Engineering, 2023, 18(1): 32-42.
[4] 丁大尉, 王高林, 张国强, 等. 三相供电交流电机驱动系统无电解电容控制技术综述[J]. 电气工程学报, 2021, 16(4): 2-11.
Ding Dawei, Wang Gaolin, Zhang Guoqiang, et al. Review of control technology for electrolytic capacitorless AC motor drives with three-phase power supply[J]. Journal of Electrical Engineering, 2021, 16(4): 2-11.
[5] 王建渊, 王海啸, 尹忠刚, 等. 基于一阶线性自抗扰控制器的同步磁阻电机无速度传感器控制[J]. 电工技术学报, 2024, 39(14): 4405-4421.
Wang Jianyuan, Wang Haixiao, Yin Zhonggang, et al. Sensorless control of synchronous reluctance motor based on first order linear active disturbance rejection controller[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4405-4421.
[6] 蔡正友, 魏佳丹, 胡文枝, 等. 基于改进同步解调方式的三级式同步电机无位置传感器起动控制[J]. 电工技术学报, 2024, 39(14): 4353-4365.
Cai Zhengyou, Wei Jiadan, Hu Wenzhi, et al. Sensor- less starting control of three-stage synchronous machines based on improved synchronous demo- dulation scheme[J]. Transactions of China Elec- trotechnical Society, 2024, 39(14): 4353-4365.
[7] 王琛琛, 苟立峰, 周明磊, 等. 基于改进的离散域二阶滑模观测器的内置式永磁同步电机无位置传感器控制[J]. 电工技术学报, 2023, 38(2): 387- 397.
Wang Chenchen, Gou Lifeng, Zhou Minglei, et al. Sensorless control of IPMSM based on improved discrete second-order sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 387-397.
[8] Green T C, Williams B W. Derivation of motor line- current waveforms from the DC-link current of an inverter[J]. IEE Proceedings B Electric Power Applications, 1989, 136(4): 196.
[9] 卢伟. 基于单电流传感器的PMSM宽运行范围相电流重构算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
Lu Wei. Research on phase current reconstruction algorithm of PMSM with wide operating range based on single current sensor[D]. Harbin: Harbin Institute of Technology, 2018.
[10] 申永鹏, 郑竹风, 杨小亮, 等. 直流母线电流采样电压空间矢量脉冲宽度调制[J]. 电工技术学报, 2021, 36(8): 1617-1627.
Shen Yongpeng, Zheng Zhufeng, Yang Xiaoliang, et al. A compatible SVPWM method for DC bus current sampling[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1617-1627.
[11] 申永鹏, 武克轩, 吴成中, 等. 互补非零矢量单传感器相电流重构策略[J]. 电工技术学报, 2023, 38(8): 2126-2135.
Shen Yongpeng, Wu Kexuan, Wu Chengzhong, et al. Complementary non-zero vector current reconstru- ction strategy with single sensor[J]. Transactions of China Electrotechnical Society, 2023, 38(8): 2126- 2135.
[12] Lee W C, Hyun D S, Lee T K. A novel control method for three-phase PWM rectifiers using a single current sensor[J]. IEEE Transactions on Power Electronics, 2000, 15(5): 861-870.
[13] Gu Yikun, Ni Fenglei, Yang Dapeng, et al. Switching- state phase shift method for three-phase-current reconstruction with a single DC-link current sensor[J]. IEEE Transactions on Industrial Electronics, 2011, 58(11): 5186-5194.
[14] 顾义坤, 倪风雷, 杨大鹏, 等. 基于母线电流传感器的相电流重构方法[J]. 电机与控制学报, 2009, 13(6): 811-816.
Gu Yikun, Ni Fenglei, Yang Dapeng, et al. Novel method for phase current reconstruction using a single DC-Link current sensor[J]. Electric Machines and Control, 2009, 13(6): 811-816.
[15] Jung B, Lee T, Nam K. Overmodulation strategy for inverters with a single DC-link current sensor[C]// 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 2020: 2649- 2655.
[16] 郑晔明, 张建忠. 基于单母线电流传感器的三相永磁同步电机驱动方法[J]. 电工技术学报, 2023, 38(19): 5164-5175.
Zheng Yeming, Zhang Jianzhong. A single DC-link current sensor drive technology of three-phase permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(19): 5164-5175.
[17] 申永鹏, 王帅兵, 梁伟华, 等. T型三电平逆变器合成脉冲宽度调制相电流重构策略[J]. 电工技术学报, 2022, 37(20): 5302-5312.
Shen Yongpeng, Wang Shuaibing, Liang Weihua, et al. T-type three-level inverter composite pulse width modulation phase current reconstruction strategy[J]. Transactions of China Electrotechnical Society, 2022, 37(20): 5302-5312.
[18] Kim H, Jahns T M. Phase current reconstruction for AC motor drives using a DC-link single current sensor and measurement voltage vectors[C]//2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 2006: 1346-1352.
[19] Kim H, Jahns T M. Current control for AC motor drives using a single DC-link current sensor and measurement voltage vectors[J]. IEEE Transactions on Industry Applications, 2006, 42(6): 1539-1547.
[20] Ha J I. Voltage injection method for three-phase current reconstruction in PWM inverters using a single sensor[J]. IEEE Transactions on Power Elec- tronics, 2009, 24(3): 767-775.
[21] Saritha B, Janakiraman P A. Sinusoidal three-phase current reconstruction and control using a DC-link current sensor and a curve-fitting observer[J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2657-2664.
[22] Lee W C, Lee T K, Hyun D S. Comparison of single-sensor current control in the DC link for three-phase voltage-source PWM converters[J]. IEEE Transactions on Industrial Electronics, 2001, 48(3): 491-505.
[23] Sozer Y, Torrey D A, Mese Erkan. Adaptive predictive current control technique for permanent magnet synchronous motors[J]. IET Power Elec- tronics, 2013, 6(1): 9-19.
[24] Wolbank T M, Macheiner P E. Current-controller with single DC link current measurement for inverter- fed AC machines based on an improved observer- structure[J]. IEEE Transactions on Power Electronics, 2004, 19(6): 1562-1567.
[25] 肖飞, 许观达, 连传强, 等. 永磁同步电机单电流传感器系统的三相电流重构策略[J]. 电工技术学报, 2022, 37(7): 1609-1617.
Xiao Fei, Xu Guanda, Lian Chuanqiang, et al. Three-phase current reconstruction strategy of per- manent magnet synchronous machine drives using a single current sensor[J]. Transactions of China Elec- trotechnical Society, 2022, 37(7): 1609-1617.
Abstract In high-performance control of AC motors, a dual closed-loop vector control strategy is commonly employed to drive the machine, offering strong anti-interference capability, fast response speed, and stable operation. It is necessary to acquire real-time information about the three-phase currents of the motor stator windings by installing at least two current sensors to detect phase currents. Multiple sensors increase the system cost and equipment volume, which is not conducive to the development of control equipment miniaturization. Based on the DC-link current sensor sampling principle, this paper proposes active zero state pulse width modulation (AZSPWM) as a replacement for controlling the motor after analyzing the issues of phase current reconstruction blind zones caused by space vector pulse width modulation (SVPWM).
Firstly, based on the switching states of the three-phase voltage source inverter, six active voltage vectors and two zero voltage vectors are defined, establishing the relationship between DC-bus current and phase currents under different switching states. By analyzing the actual switching process and the variation of DC-bus current, the minimum duration of the switch state Tmin=DTs is determined for current sampling. The voltage vector hexagon under SVPWM control is divided into low modulation region, sector boundary region, and measurable region.
A method using AZSPWM is proposed to reduce the phase current reconstruction blind zone. The operational interval of AZSPWM and its phase current reconstruction blind zones are analyzed, and a vector insertion method is employed to address blind zone issues at low modulation regions. This approach allows for a  voltage utilization rate, and 100% voltage utilization rate can be achieved when
voltage utilization rate, and 100% voltage utilization rate can be achieved when  . The entire voltage vector region is divided into 12 sub-zones, with different voltage combinations selected for different sub-zones. By arranging the switching sequence reasonably, no additional switching is required under AZSPWM control.
. The entire voltage vector region is divided into 12 sub-zones, with different voltage combinations selected for different sub-zones. By arranging the switching sequence reasonably, no additional switching is required under AZSPWM control.
In the experiments, with a PWM carrier frequency of 10 kHz, Tmin of 10 ms, and D=0.1, the voltage utilization ratio is  . Steady-state operation experiments are conducted in low and high modulation ratio intervals, as well as transient experiments on the transition between vector-inserted and non-vector-inserted AZSPWM control methods. The reconstructed currents closely followed the actual currents, with a reconstruction error smaller than the fluctuation of the actual current within one PWM cycle. As torque increases and speed rises, the current variation within a single PWM cycle increases, leading to a larger standard deviation in the reconstructed current error. Smooth switching between different PWM control methods is achieved.
. Steady-state operation experiments are conducted in low and high modulation ratio intervals, as well as transient experiments on the transition between vector-inserted and non-vector-inserted AZSPWM control methods. The reconstructed currents closely followed the actual currents, with a reconstruction error smaller than the fluctuation of the actual current within one PWM cycle. As torque increases and speed rises, the current variation within a single PWM cycle increases, leading to a larger standard deviation in the reconstructed current error. Smooth switching between different PWM control methods is achieved.
The experiments concluded that (1) the proposed method achieves stable operation in low and high modulation ratio intervals. A 92.4% voltage utilization rate can be achieved without phase current reconstruction blind zones. (2) The error between reconstructed and actual currents is less than the fluctuation of the current within one PWM cycle, with the feedback current lagging behind the actual current by one PWM cycle. (3) The actual current harmonics are mainly distributed near the switching sub-frequency. Different loads almost have no impact on the accuracy of the reconstructed current, although speed changes slightly affect the accuracy.
keywords:Motor control, DC bus current sensoring, phase current reconstruction, active zero state pulse width modulation, high voltage utilization
DOI: 10.19595/j.cnki.1000-6753.tces.241003
中图分类号:TM301.2
国家重点研发计划资助项目(2022YFB3403100)。
收稿日期 2024-06-13
改稿日期 2024-08-01
房钰超 男,1995年生,博士研究生,研究方向为永磁同步电机控制。E-mail: ycfang95@zju.edu.cn
王云冲 男,1987年生,副教授,博士生导师,研究方向为电机设计及其控制。E-mail: wangycee@zju.edu.cn(通信作者)
(编辑 崔文静)