图1 动态无线供电示范线示意图
Fig.1 Schematic diagram of the dynamic wireless power transfer demonstration line
摘要 动态无线供电技术为电动汽车的能量供给方式提供了颠覆性的解决方案,为了提升系统的效率及安全性,采用多段导轨阵列排布、根据车辆位置灵活选通成为必要手段。该文首先概述电动汽车动态无线供电技术的发展现状及车辆定位方式;进一步综述了位置检测技术的应用和创新;详细讨论了有辅助检测装置的位置检测技术以及无辅助检测装置的纵向位置检测技术的发展历程、当前的技术实现以及存在的关键问题;最后指出位置检测技术在检测精度、响应速度、成本和环境适应性方面有待进一步提升,并对未来的研究方向进行了展望,以期为动态无线供电系统中位置检测技术的研究提供借鉴和参考。
关键词:电动汽车 动态无线供电 分段发射导轨 位置检测
电动汽车的发展能够有效缓解环境污染和能源短缺问题,推动建设绿色低碳循环的生态经济体系,得到了各国政府的关注和支持,许多国家设定了到2030年或更早实现全面电动化的目标[1-4]。根据国际能源署(International Energy Agency, IEA)数据,2023年全球电动汽车销量达到近1 400万辆,同比增长35%,2024年销售量已达到1 700万辆。我国2024年电动汽车销售量预计达到1 000万辆左右,约占汽车总销量的45%。在此背景下,无线电能传输(Wireless Power Transfer, WPT)技术作为一项新兴技术,可以实现能量的非接触传输,具有更高的灵活性、安全性及环境适应性,对电动汽车的技术升级和市场推广具有重要研究价值[5-7]。目前,国际电工委员会(International Electrotechnical Com- mission, IEC)、国际标准化组织(International Organization for Standardization, ISO)、美国汽车工程师协会(Society of Automotive Engineers, SAE)、中国国家标准化管理委员会已分别出台了IEC 61980、ISO 19363、SAEJ2954、GB/T 38775等无线充电标准,以促进该项技术的进一步推广应用[8-11]。
动态无线电能传输(Dynamic Wireless Power Transfer, DWPT)技术基于电磁感应原理,可以为行进中的车辆实时非接触供能,有助于减少车载电池用量,降低整车质量和成本,提高系统的安全性和环境适应性;充电设备埋于地下,不占用地上面积,有利于基础设施的网格化、分布化[12-15];充电不再单独占用时间,可充分利用公路、红绿灯、停车场等场所自动补电,减少充电时间,提升充电的便捷性;基于其可以边跑边充的技术优势、广泛分布的供电设备以及灵活补电的工作场所,可大大提升续驶里程[16-18]。因此,动态无线供电技术为电动汽车面临的电池和充电问题,提供了颠覆性的解决方案,具有重要的研究意义和实用价值[19-21],尤其是在智能化、无人化的发展潮流下,动态无线供电技术将成为电动汽车的刚需[22-24]。目前,中国电源学会已经出台了团体标准T/CPSS 1001—2021及T/CPSS 1010—2020,对动态无线充电系统技术要求进行了规定,国际上关于动态无线充电的标准也正在起草当中。
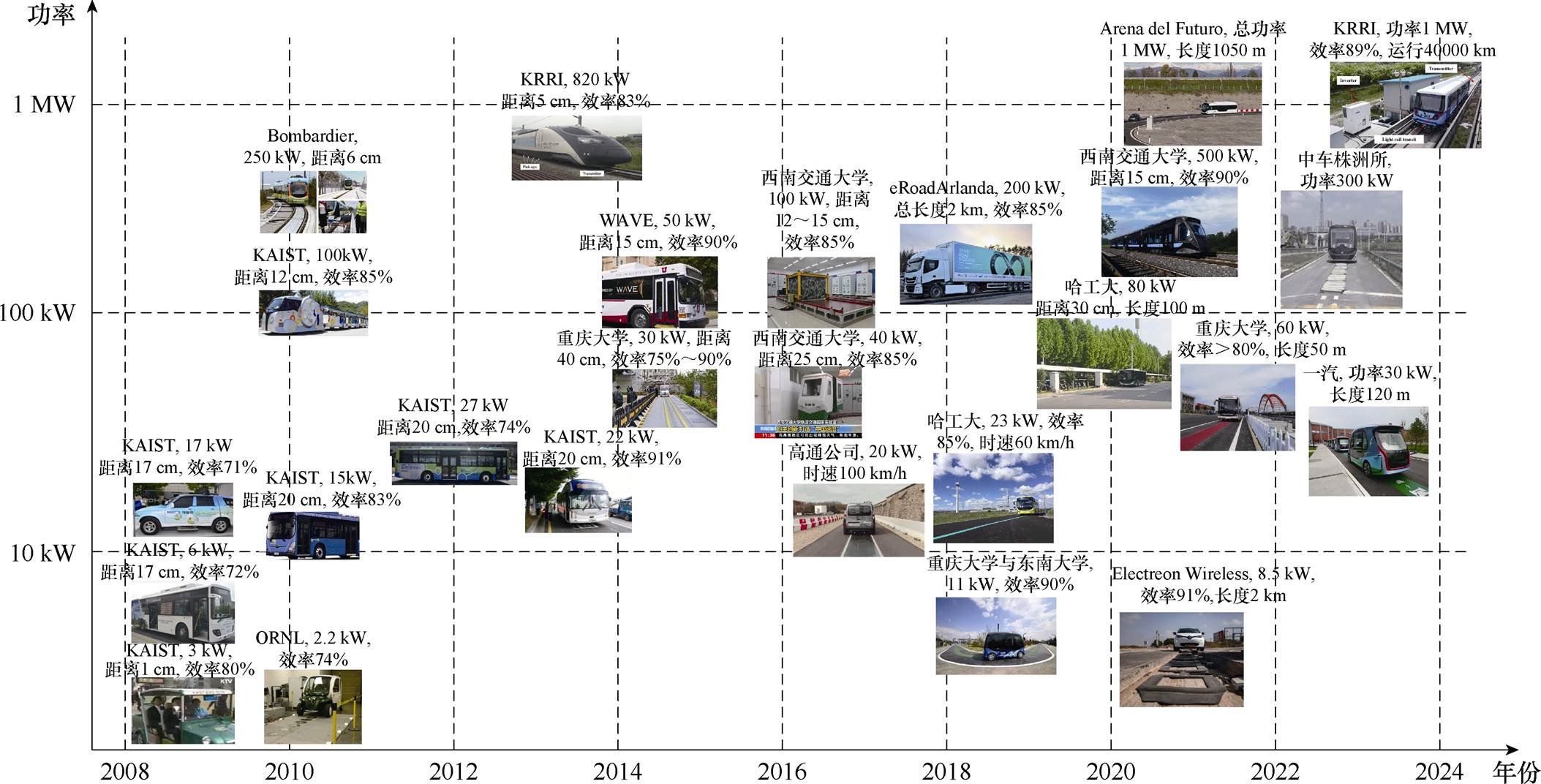
近年来动态无线供电技术已得到了国内外众多研究机构和公司的广泛关注和重点研究,目前世界各地已开发了多条试验线,验证了该项技术的可行性,动态无线供电示范线示意图如图1所示。新西兰奥克兰大学(University of Auckland, UoA)在动态无线供电技术方面做了大量的基础研究,提出了长直型[25]、蜿蜒型[26]、DD型发射导轨,以及E型[27]、S型[28]、平面型[29]、DD型[30]、DDQ型[31]、BP型[32]和圆盘型[33]等多种接收线圈结构。基于该项技术,高通公司于2017年建设完成一条100 m的电动汽车动态无线供电示范线,输出功率为20 kW[34],充电时车速可达100 km/h。韩国高等科学技术研究院(Korea Advanced Institute of Science and Technology, KAIST)研发的在线电动汽车(Online Electrical Vehicles, OLEV)自2009年至今已推出六代系统,并在韩国多地投入商业化运行[35]。WAVE公司2014年在美国盐城湖建设了一条功率等级50 kW、传输距离15 cm、效率90%的电动汽车动态无线供电示范线[36]。以色列Electreon公司在2018年及2021年建设了传输功率分别为200 kW和8.5 kW、总长度均为2 km的动态无线供电示范线,其中2018年在瑞典建设的eRoadArlanda项目花费约582万美元[37]。2021年,Stellantis集团与其项目合作伙伴在意大利基亚里建设完成一条1 050 m、道路总传输功率1 MW的电动汽车动态无线供电示范线[38]。
图1 动态无线供电示范线示意图
Fig.1 Schematic diagram of the dynamic wireless power transfer demonstration line
国内也有相关理论和应用研究,2016年重庆大学与南方电网合作建设完成国内第一条动态无线供电系统示范线路,线路总长100 m,最大输出功率达30 kW,效率为75%~90%。重庆大学和东南大学2018年在江苏同里建设了一条动态无线供电道路,系统输出功率为11 kW,效率可达90%[39]。2021年重庆大学与广西电网电力科学研究院合作,研制了一条长53 m、宽3 m、额定输出功率60 kW的动态无线供电试验线,充电效率80%以上,电磁辐射小于6 mT[40]。哈尔滨工业大学提出了N型发射导轨和多相接收线圈的磁耦合机构,具有发射导轨窄、侧移能力强、传输功率大、行进波动小的优点[41]。2016年该团队同中国电力科学院合作,在张北县建成了国内首条百米级电动汽车动态无线供电试验线,充电功率为20 kW。2019年与宇通客车公司合作,建成了一条100 m电动公交车动态无线供电试验线路,输出功率可达80 kW,系统效率80%以上[8]。一汽研发总院2023年在长春建设了一条长为120 m、单模块输出功率为30 kW的无线充电道路,车辆行驶过后补充的电量可以增加1.3 km[42],系统采用先进的位置检测方法和开关发射线圈技术,实现实时位置的检测以及高效的能量传输。根据上述研究现状,电动汽车动态无线供电系统的功率等级通常为10~100 kW,系统效率为80%~90%,更高功率等级的应用多集中在轨道交通领域。庞巴迪(Bombardier)公司针对轨道交通应用推出了基于长导轨式的PRIMOVE动态无线供电系统,在6.5 cm的传输距离下,可以实现250 kW的功率输出[43]。韩国铁道科学研究院(Korea Railroad Research Institute, KRRI)于2015年设计并建造了一种长导轨式高速列车动态无线供电系统,在5 cm的传输距离下输出818 kW的功率,测试时列车时速为10 km/h,系统效率为82.7%[44];2024年上述系统进行了完善,实现了最大功率为1 MW、最高效率为89%的功率输出,并持续运行了40 000 km[45]。西南交通大学先后研制了多套轨道交通动态无线供电系统,其中国内首套城轨车辆动态无线供电系统在15 cm的传输距离下可以输出500 kW的功率,系统传输效率大于90%[46]。中车株洲电力机车研究所2023年研制了一套智轨电车无线充电系统,采用单发射对四拾取结构,实现了300 kW的功率传输,在5 km/h运行状态下平均效率可达86%,车辆位置检测采用的是超宽带(Ultra Wide Band, UWB)定位技术[47]。
综上所述,动态无线供电技术具有很高的可行性和应用潜力,如何提升系统效率、降低成本、保证电磁兼容性和安全性有待进一步研究。
随着动态无线供电线路的延长,发射端采用多段导轨阵列排布、根据车辆位置灵活选通成为提升效率和电磁兼容性的必要手段,动态无线供电系统组成示意图如图2所示。T/CPSS 1001—2021要求当电动汽车经过指定充电区域时,仅电动汽车下方的导轨段打开,进入传能状态,而其他未处于电动汽车下方的导轨段关闭,以减小能量损耗与电磁干扰(Electromagnetic Interference, EMI)。电动汽车所在导轨段对应的导轨控制器用于检测车载端位置,并通过通信总线将该信息传输至系统总控制器,实现导轨的切换,导轨切换时间应小于2 ms。且其辅助系统中必须包含位置检测系统,即通过声、光传感器或借助电路参数检测电动汽车在电能发射线圈导轨上的实时位置。因此,动态无线供电系统对位置检测技术有以下几方面性能要求:
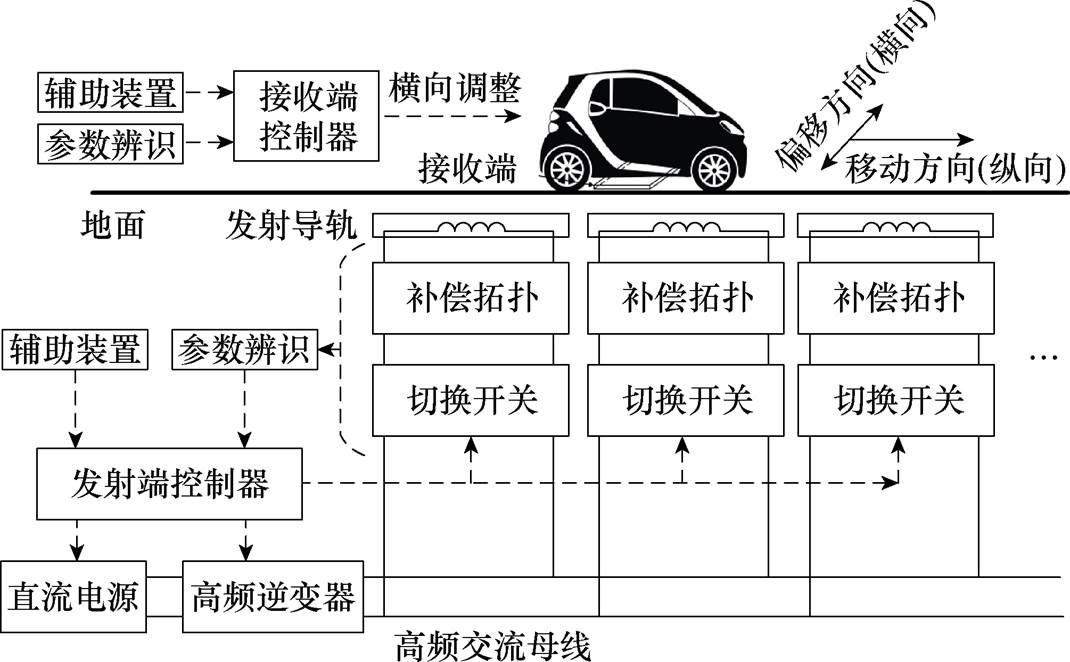
图2 动态无线供电系统组成示意图
Fig.2 Schematic diagram of the composition of the dynamic wireless power transfer system
(1)实时监测车辆行进方向位置并将信息反馈给控制系统,以选通与接收端耦合的发射导轨。
(2)车辆在行驶过程中可能因路况和驾驶技术的影响而发生横向偏移,这会导致输出功率和传输效率的降低。精确的位置检测可以及时调整供电方案,提醒司机或自动驾驶系统修正行驶方向,从而确保车辆始终处于最佳充电位置。
(3)为了保证供电的稳定性,提升速度适应性,位置检测系统需要具有足够快的响应速度。
(4)位置检测系统应具备良好的环境适应性,以确保在各种天气和路面条件下的稳定运行,同时需考虑长期使用中的误差累积。
(5)经济性和可部署性同样重要,简化算法、降低硬件要求和优化系统架构将有助于降低成本和复杂度。
根据上述应用需求,本文对动态无线供电系统中位置检测技术的研究进展进行综述,分别从车辆定位技术、动态无线供电系统位置检测的分类和特点以及关键问题的研究现状展开分析,最后对亟待解决的关键问题和未来的发展方向进行了讨论。
在现代汽车技术领域,不论是一般驾驶者还是自动驾驶系统,都需要可靠的定位技术来保证车辆的精准定位和安全行驶。目前,主流的汽车定位技术主要包括全球导航卫星系统(Global Navigation Satellite System, GNSS)定位、惯性导航系统(Inertial Navigation System, INS)定位、地图匹配定位、无线通信定位、磁定位以及视觉定位等。这些技术各有其优势和限制,涵盖了从全球性定位到更为局部的环境感知。选择适当的定位技术取决于特定的应用场景、定位精度需求以及成本考量。因此本节针对不同汽车定位技术的研究和发展现状进行了对比和总结。
全球导航卫星系统是一种基于卫星的无线电导航系统,如图3所示,用于提供高精度位置、速度等信息。现有卫星定位系统主要有美国的全球定位系统(Global Positioning System, GPS)、俄罗斯的全球导航卫星系统、中国的北斗卫星导航系统及欧盟的伽利略全球导航卫星系统等。GNSS能够提供实时、全天候、全时段的定位服务并且可以直接给出汽车在世界坐标系中的绝对位置信息[48]。GNSS定位设计为多卫星系统,即使部分卫星失效,系统仍可继续提供服务,保证了较高的服务连续性;可以依靠多国卫星系统的合作,如GPS和北斗,提供冗余保障,增强系统的全球覆盖和抗干扰能力,具有较高的可靠性。目前GNSS技术已广泛集成到手机、汽车和航空航天技术中,用户界面友好,易于获取和使用。但是,其定位精度只能达到m级,并且信号在高层建筑、隧道、立交桥、浓荫大道等区域会发生漂移,导致其定位精度变差甚至出现定位丢失等问题;在极端气候条件下,如太阳风暴,GNSS信号可能受到严重干扰,影响其性能和安全性[49];同时,GNSS设备能够追踪到个人的具体位置和行为模式,可能会对个人隐私以及安全造成威胁;对于使用GNSS进行精密导航的设备,如车辆自动驾驶及飞行设备,若信号受到干扰或欺骗极易造成严重事故[49]。
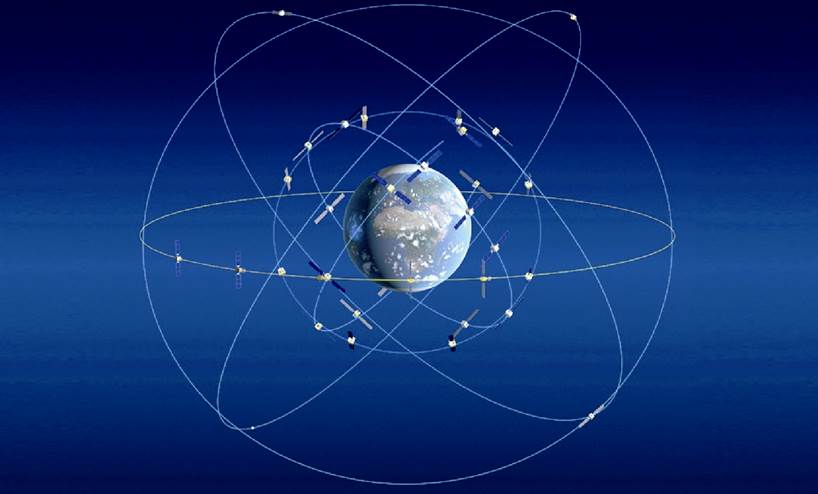
图3 GPS
Fig.3 Global positioning system
与全球导航卫星系统相比,激光雷达(Light Detection and Ranging, LiDAR)测距定位技术具有更高的精度以及更强的环境适应性,该技术基于激光脉冲的时间飞行原理,利用激光测量物体与发射源之间的距离,如图4所示[50]。具体来说,LiDAR设备的激光发射器会发射一系列定向激光脉冲,当这些脉冲击中目标物体后,会被反射回来并由设备内的接收器捕捉。接收器随后记录下激光脉冲从发射到返回的时间,并利用该时间乘以光速,从而准确计算出与目标物体的距离[51]。相比于传统的测距技术,LiDAR可以在各种光照条件下工作,不受日夜变化的影响,能达到cm级的精度,非常适合进行高精度地图创建和环境建模,且强大的穿透力使其能够在恶劣天气条件下也可工作,保证定位结果的可靠性。然而LiDAR系统通常价格昂贵且在定位过程中产生的数据量庞大,需要复杂的算法和强大的计算资源来处理和解析,在实际应用过程中可能产生较大的延迟。此外,由于激光脉冲可能会穿过或被完全反射,因此LiDAR在穿过透明或高反射表面时可能会失效,若将其应用在智能驾驶领域,可能会影响对这类障碍物的识别。若能通过优化数据处理算法,减少LiDAR系统对硬件资源的依赖,将能提高此定位技术的实时性,也可将LiDAR与其他传感器技术相融合以提供更全面和可靠的环境感知能力。
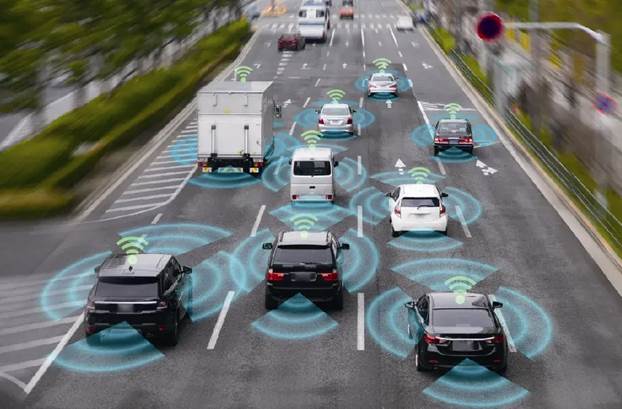
图4 激光雷达定位系统
Fig.4 LiDAR positioning system
在一些激光雷达可能失效的环境中(如高反射表面),INS依赖内部传感器,不需要外部信号,仍能维持定位能力。INS主要由惯性测量单元(Inertial Measurement Unit, IMU)、信号预处理单元和机械力学编排模块组成,通常包含三轴加速度计和三轴陀螺仪[52],惯性导航系统组成如图5所示。INS依靠内置传感器实现自主定位,利用加速度计和陀螺仪的输出进行两次积分,从而获得三维位置信息和旋转信息。INS广泛应用于航空航天(如飞行器导航)、海洋航行(如潜艇定位)、自动驾驶(如无人驾驶汽车)、消费电子(如智能手机导航)和地震监测(如地震活动追踪)等领域。具体数据显示,当前市场上高精度INS系统的定位精度可达0.1%~0.5%。INS通过内置传感器实时计算位置和方向,无需等待信号传播,因此响应速度快,适合动态环境和高速运动的应用场景,在短期内INS可以提供非常精确的位置信息。然而,由于INS的定位误差会随时间积累,在长时间定位中误差可能会达到数公里,这限制了INS定位技术在长期应用中的有效性。而高精度的加速度计和陀螺仪价格高达数千美元,使得其无法广泛用于消费级产品[53],且其定位精度会受到温度振动以及其他环境因素的影响。在一些应用中,如无人机即车辆导航,常常将INS与GPS结合使用,以实现互补优势即GPS提供长期导航,而INS用于在GPS信号丢失的短暂时段定位。
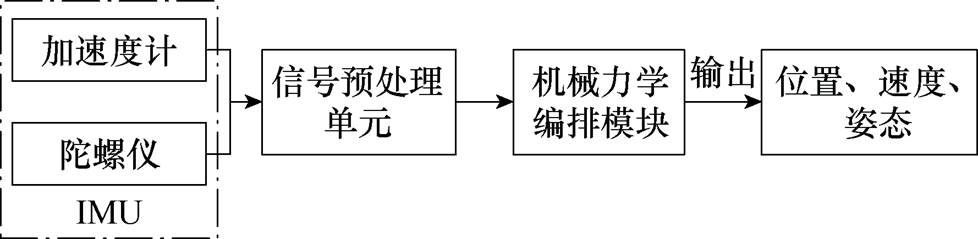
图5 惯性导航系统组成
Fig.5 Composition of the inertial navigation system
与依靠机械传感器的INS不同,磁定位通过感知磁场的微小变化来确定位置,由于磁定位不受物理振动或温度变化的影响,它在一些特定环境中比INS更为稳定。最基本的磁定位方法是基于地磁进行定位,但其在获取初始位置时存在一定的困难[54]。为了提高定位精度,目前主流的磁定位技术采用在道路中埋设磁信号源的方法,常见的信号源包括磁带、信号电缆和磁钉,以及三者的组合使用,如图6所示。这些信号源能够创建稳定的磁场,使得磁定位系统的精度通常可达10~20 cm。埋设磁信号源的磁定位方法虽然精确,但部署和维护成本高,需要对现有路面结构等基础设施进行较大的修改,虽然磁定位不受天气和光照影响,但它极易受到来自道路上的车辆、附近的建筑物或其他任何含有金属的物体的干扰[55]。磁定位可以用于辅助自动驾驶汽车和其他车辆的精确导航,特别是在GPS信号受限的环境中,如隧道或城市高楼之间的街道。

图6 基于磁钉导航的自动驾驶技术
Fig.6 Autonomous driving technology based on magnetic nail navigation
与磁定位相比,无线通信定位在室内或地磁较弱的环境中定位性能通常更优,它可以利用多个基站之间的信号差异来提高精度。其中,UWB定位技术尤为突出[56]。UWB技术通过发射非常短的非正弦波形脉冲(通常在ns~ms级别),利用这些脉冲的到达时间或到达时间差来确定位置,其定位原理如图7所示。UWB的定位精度可达10 cm以内,在复杂环境中,如有多个反射面的场所,UWB技术因其脉冲宽度短,能够有效区分直达信号和反射信号,从而可以减少多路径效应的影响但仍不能完全避免。由于UWB信号宽频带特性使得其具有较好的穿透能力,能够在一定程度上穿透墙壁和其他障碍物,在实际运行中UWB在发送短脉冲时消耗的能量较少,适合长时间运行的应用[57]。在车路协同系统中,UWB可以用于精确测量车辆之间的距离和位置,从而提高道路安全,特别是在复杂或拥挤的交通环境中。此外,UWB也可以在停车场中用于自动泊车系统,提供精确的车位定位。然而,UWB也面临一些挑战,如其硬件问题导致的晶振偏差和动态定位中的动态误差。此外,UWB基站的部署需要大量的人力、物力和财力,使其在室外大规模环境中的应用受到限制[58]。
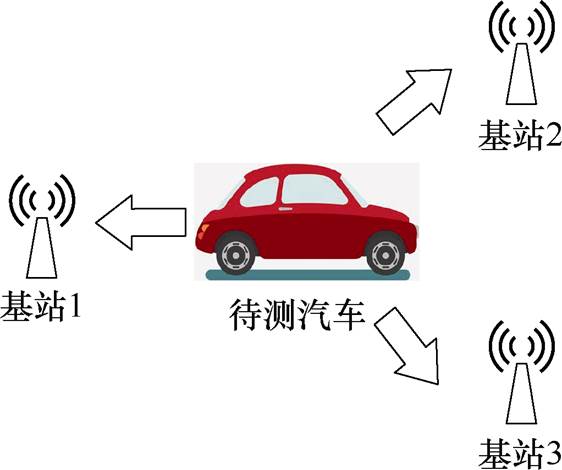
图7 UWB定位原理
Fig.7 Schematic of UWB positioning
相对于基于信号的无线通信定位,地图匹配定位技术通过与预构建的高精度地图对比来确定位置,在视觉或激光雷达数据丰富的城市环境中精度更高。尤其是在复杂的道路网络中,地图匹配定位流程如图8所示。这种技术主要包括视觉地图匹配和激光雷达地图匹配两种方法。视觉地图匹配通过相机捕获周围环境的图像,并与地图中的图像特征进行匹配以估计车辆的实时位置。这种方法成本相对较低,但对光照条件敏感,且在环境或视角变化大时可能出现匹配错误。视觉匹配的定位精度通常在10~30 cm范围内[59]。激光雷达地图匹配利用点云信息与预先构建的地图进行匹配,这种方法不依赖光照,因此在多种天气和光照条件下均能稳定工作。激光雷达能提供更高的定位精度,约为5~10 cm,非常适合需要精确导航的应用。然而,这种技术的设备和维护成本较高,数据处理也较为复杂。地图匹配技术有效地避免了误差累积,使定位精度可达cm级,广泛应用于自动驾驶和智能交通系统。尽管如此,这种技术的制作和维护相当复杂且成本高昂。高精度地图的创建和定期更新需要大量的投资,激光雷达测绘每km的成本可达数万元,并且需要频繁更新以反映环境的变化,增加了长期运营的经济负担[60]。
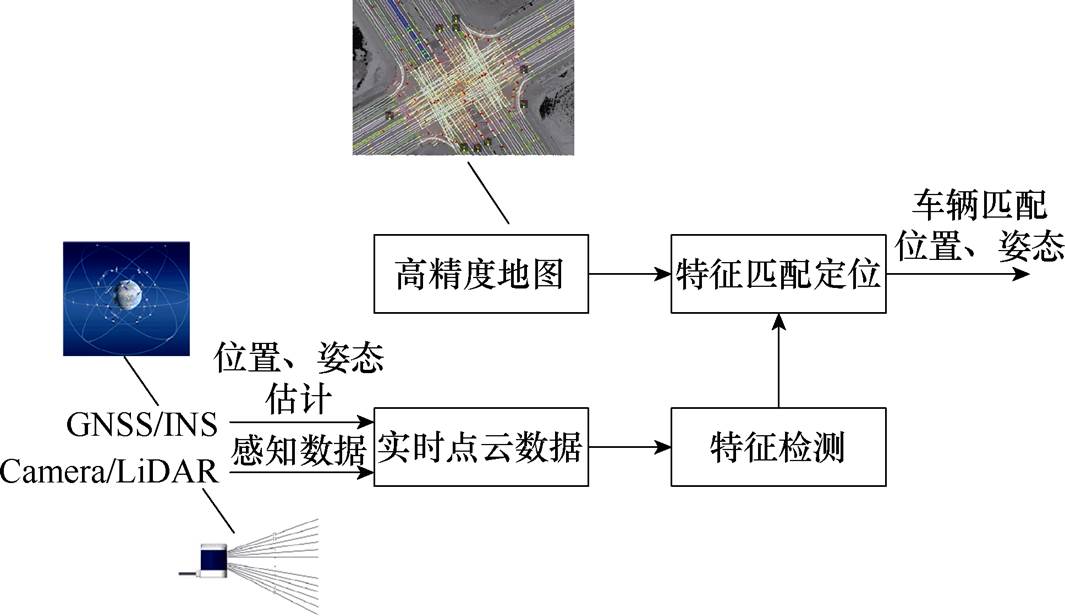
图8 地图匹配定位流程
Fig.8 Process of map matching positioning
与地图匹配技术相比,视觉定位对环境的视觉特征依赖更大,而不是仅仅依靠地理位置数据。该系统通过摄像头捕获周围环境的图像,并利用计算机视觉技术分析这些图像来确定设备的位置和方向。这一过程包括识别图像中的特征点,如角点、边缘或其他显著特征,并将这些特征点与已知的地标或地图数据进行匹配。通过这种匹配,系统不仅能够计算出设备在空间中的精确位置,还能确定设备的姿态,即在空间中的方向。视觉定位系统如图9所示[61]。相比于激光雷达等高成本传感器,摄像头更为经济,易于大规模部署。视觉定位系统广泛应用于自动驾驶汽车、机器人导航和增强现实等领域,特别适用于GPS信号受限的室内环境。然而其精确性高度依赖环境光照条件,在光线不足或反射强烈的环境中可能会受到影响。视觉定位系统通常会与其他传感器技术结合使用,提高定位的准确性和鲁棒性[62]。

图9 视觉定位系统
Fig.9 Visual positioning system
相比于视觉定位技术,扫码技术则提供了一种更直接且控制性强的定位方法,适用于指导用户到达特定位置。这项技术通过在特定位置放置标记的二维码或条形码实现,在定位过程中,二维码通常被打印并贴在各种物体或建筑物上,如图10所示。当用户使用智能手机或专用扫描设备扫描这些二维码时,内置或第三方应用程序解析出编码的数据,并将其转换为具体的地理位置信息。扫码定位系统的核心是二维码的信息密度和安全性,二维码可以嵌入大量数据,包括网址、地理位置标识符和其他元数据。这使得二维码不仅可以存储位置信息,还可以包含有关该位置的具体详情,如访问时间、安全访问权限等。然而,这也带来了安全挑战,因为二维码容易被复制或篡改。若未采取适当的安全措施(如加密、动态生成二维码等),可能导致信息泄露或误导用户到错误的位置。目前扫码定位技术可以与其他系统集成,如GPS定位以及增强现实(Augmented Reality, AR)技术,以提高用户体验和定位准确性。例如,扫描二维码后,系统可以激活手机的AR功能,显示覆盖在用户实际环境中的虚拟路径指示。此外,结合使用GPS可以在室外环境中验证二维码的物理位置,可以增加系统的鲁棒性[63]。

图10 二维码定位系统
Fig.10 QR code positioning system
与扫码定位相比,蜂窝定位不受物理位置标记的限制,能够在更广泛的地区提供连续的定位服务。该技术通过分析移动设备与周围蜂窝基站之间的信号特性(如信号强度、到达时间差或角度)来确定设备的位置[64]。它无需额外硬件,依赖现有通信网络,能够在GPS信号弱或不可用的环境中提供位置服务。蜂窝网络定位系统如图11所示。蜂窝定位方式包括基站定位、信号强度三角定位、到达时间差(Time Difference of Arrival, TDOA)定位、到达角度(Angle of Arrival, AoA)定位等,每种蜂窝定位技术具有不同的优点与局限性,适用于不同的应用场景。基站定位因其成本低和操作简便而广受欢迎,尽管其精度受限于单一基站信号的范围,通常在几百米至几千米,适用于对精度要求不高的场景。信号强度三角定位则可以通过测量设备与多个基站之间的信号强度差异来提高位置精度,但其性能在建筑密集或地形复杂的地区可能会受到影响。TDOA技术依靠精确测量信号到达不同基站的时间差来实现更高精度的定位,虽然这需要基站间有良好的时间同步,增加了技术复杂性和成本,但特别适合需要严格定位精度的工业和安全应用。AoA技术通过测量信号的到达角度来进行定位,尽管高级感知方向的硬件成本较高,但能够在基站密集的城市环境中提供极高的精度和丰富的方向信息,非常适合复杂的城市导航和密集的人流管理。在基站密集的地区,如城市中心,蜂窝定位的精度可以显著提高,然而在基站稀疏的地区,如农村或偏远地区,定位精度和可靠性大幅下降。这项技术广泛应用于导航、紧急服务、物流管理和地理围栏等场景,具有覆盖范围广、能耗低的优势[65]。
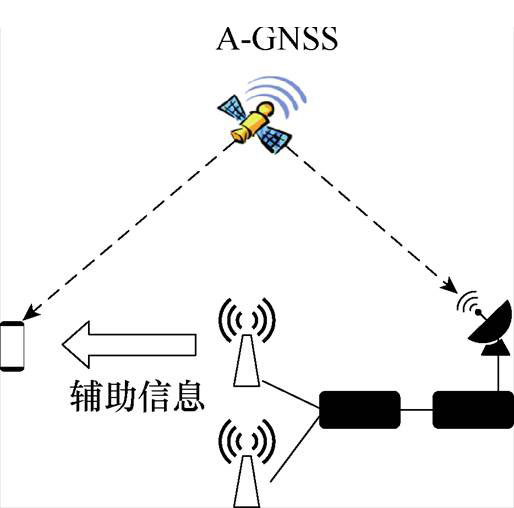
图11 蜂窝网络定位系统
Fig.11 Cellular network positioning system
上述多种汽车定位技术的对比见表1。在精度方面,激光雷达地图匹配定位以其高精度(5~10 cm)和稳定性强在技术中突出;而视觉定位虽具备高精度但易受环境光线及计算能力的影响;惯性导航系统(INS)在长期使用中误差累积显著;全球导航卫星系统在复杂环境如高楼或隧道中精度显著下降;蜂窝网络定位的精度则高度依赖于基站的分布密度;而扫码定位虽在小范围内具有高精度,但需要用户主动操作。在实时性方面,激光雷达和视觉定位因反应迅速,特别适用于如动态避障和自动驾驶等需即时响应的场景;UWB和磁定位也显示出快速响应能力,但应用场景受限。在成本方面,INS和激光雷达较高,适用于不受成本限制的技术领域;相反,GNSS和扫码定位成本低廉,更适合成本敏感型应用。在环境适应性方面,磁定位在无金属干扰的环境下性能稳定;视觉定位在环境变化大时,尤其是恶劣天气下,性能可能受影响;而激光雷达在高反射表面则可能失效;GNSS在密集城市或室内环境中的表现也较差。因此,选择合适的定位技术需要考虑具体的应用场景,以确保在不同环境中获得最佳的定位效果。
表1 车辆定位方式类型及其特点
Tab.1 Types of vehicle positioning methods and their characteristics
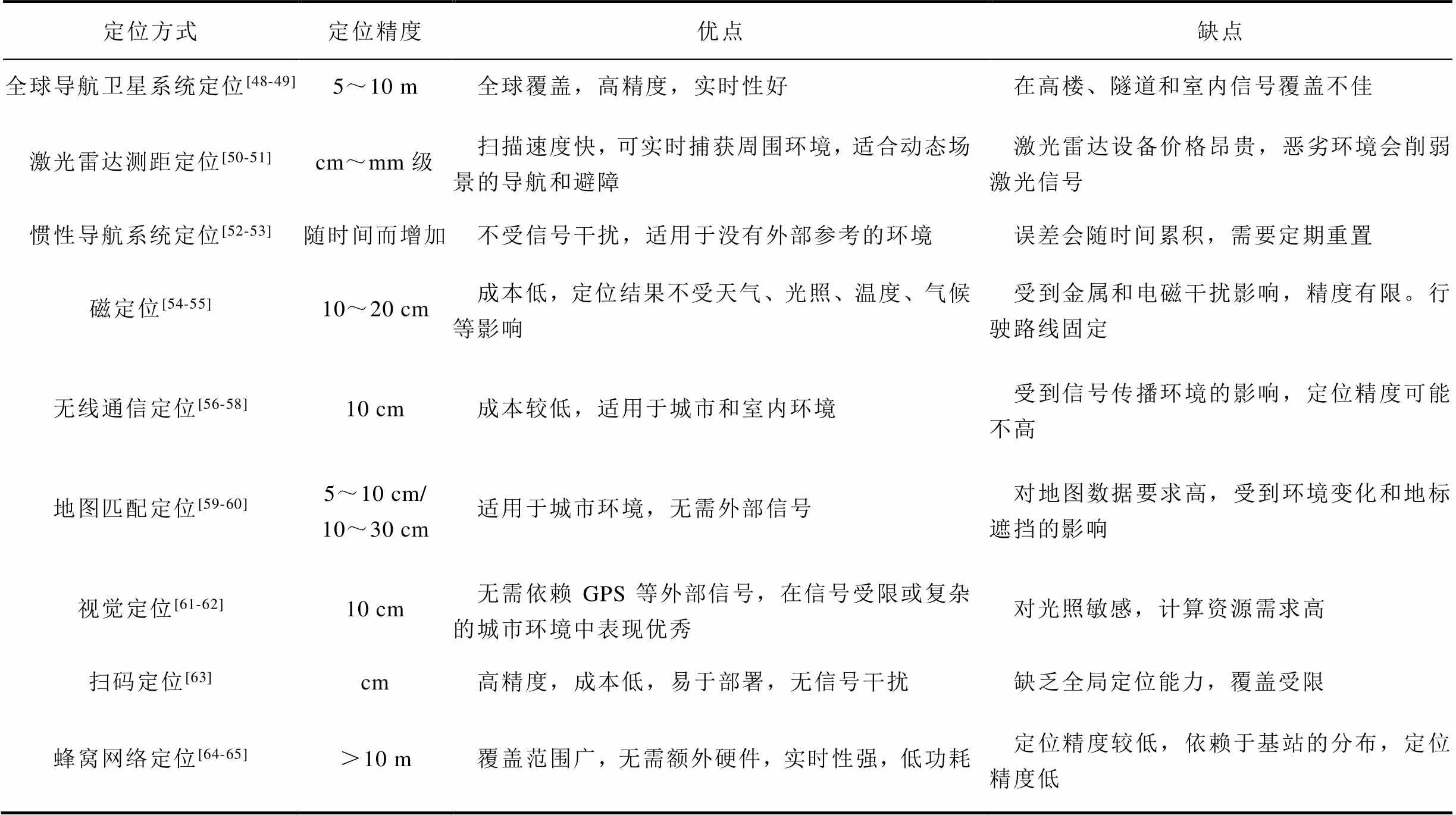
定位方式定位精度优点缺点 全球导航卫星系统定位[48-49]5~10 m全球覆盖,高精度,实时性好在高楼、隧道和室内信号覆盖不佳 激光雷达测距定位[50-51]cm~mm级扫描速度快,可实时捕获周围环境,适合动态场景的导航和避障激光雷达设备价格昂贵,恶劣环境会削弱激光信号 惯性导航系统定位[52-53]随时间而增加不受信号干扰,适用于没有外部参考的环境误差会随时间累积,需要定期重置 磁定位[54-55]10~20 cm成本低,定位结果不受天气、光照、温度、气候等影响受到金属和电磁干扰影响,精度有限。行驶路线固定 无线通信定位[56-58]10 cm成本较低,适用于城市和室内环境受到信号传播环境的影响,定位精度可能不高 地图匹配定位[59-60]5~10 cm/ 10~30 cm适用于城市环境,无需外部信号对地图数据要求高,受到环境变化和地标遮挡的影响 视觉定位[61-62]10 cm无需依赖GPS等外部信号,在信号受限或复杂的城市环境中表现优秀对光照敏感,计算资源需求高 扫码定位[63]cm高精度,成本低,易于部署,无信号干扰缺乏全局定位能力,覆盖受限 蜂窝网络定位[64-65]>10 m覆盖范围广,无需额外硬件,实时性强,低功耗定位精度较低,依赖于基站的分布,定位精度低
目前,车辆定位技术虽然在许多方面取得了进展,但在定位精度、实时性和稳定性等方面仍存在一些挑战,这使得直接将车辆定位方式应用于动态无线供电系统位置检测变得困难。动态无线供电系统需要更高精度和更快速的位置检测,以确保接收端能够准确地获取能量,并且能够随着设备的移动进行实时调整。因此需要针对动态无线供电系统的特定需求进行定位技术的研究和优化,以解决其在实际应用中的挑战。
动态无线供电系统位置检测技术按其是否配备辅助检测装置一般可分为两类。第一类是基于有辅助检测装置技术,检测装置通常包括各种传感器、线圈、摄像头等设备,这些辅助装置可以提供更丰富的环境信息,从而增强位置检测系统的定位能力。基于辅助检测装置的技术往往具有较高的精度和可靠性,适用于各种复杂环境下的应用场景。但是其往往会占用一定的空间并且提高系统成本。第二类是基于无辅助检测装置技术,在没有辅助检测装置的情况下,位置检测系统需要依靠电路中电压、电流、相位等参数并与算法相结合来实现目标的定位。这种技术更加依赖信号处理和数据融合算法,以从有限的数据中提取目标的位置信息。无辅助检测装置技术在成本、功耗等方面具有优势,但对复杂环境的适应性较有辅助装置技术略低。
动态无线供电系统的位置检测技术根据其检测目的通常也可分为两类。第一类是在接收端运动过程中实现发射导轨连续切换的纵向位置检测。这种检测技术的目的在于能够及时准确地掌握接收端在导轨上的位置,以便及时进行导轨切换,确保系统运行的平稳性和安全性。第二类是着重于避免接收端偏离导轨的横向位置检测。通过监测接收端相对于导轨的水平位置偏移,并及时校正偏移量,可以确保系统始终处于最佳工作位置,避免因偏移引起性能的降低或可能的故障。然而在当前的研究中,由于无辅助装置检测技术往往难以获取充足的数据,导致无法准确检测到接收端的横向偏移,因此主要采用有辅助装置检测技术来实现横向偏移检测。
综上所述,将上述两种分类方式交叉组合后,动态无线供电系统的位置检测技术可以分为三类,分别是有辅助检测装置的纵向位置检测技术、有辅助检测装置的横向位置检测技术和无辅助检测装置的纵向位置检测技术。
目前动态无线供电系统有辅助装置的位置检测技术采用的检测装置有辅助检测线圈、磁传感器、高清摄像头、射频收发器等。采用辅助检测线圈的方式主要是利用接收端进入发射导轨范围内时,检测线圈的电压、电流等信号变化来判断车辆的位置。这种方法能够提供较高的准确性,它直接依赖动态无线供电系统的功率变化。磁传感器方式是在轨道上埋设磁性物质,当车辆经过带有磁性物质的位置时,磁传感器会感应到磁场的变化,从而确定车辆的位置。这种方法相对来说比较稳定,但需要在发射端进行额外的标记安装。射频收发器使用射频信号来进行位置检测,通常车辆上携带有射频标签或装置,当车辆经过感应区域时,射频收发器可以读取到标签发送的信号,从而确定车辆的位置。高清摄像头位置检测技术则是在车辆周围安装高精度的传感器和摄像头,利用人工智能(Artificial Intelligence, AI)系统实时监测车辆的位置和姿态,一旦检测到偏移,系统可以立即采取措施进行调整,如调节传输功率、调整传输方向或通过智能控制算法来纠正偏移,从而确保动态无线供电系统的稳定性和效率。
2013年,奥克兰大学提出了一种动态无线供电位置检测系统,其采用三线圈结构,利用线圈之间的互感变化实现对电动汽车的供电控制。三线圈位置检测方法示意图如图12所示[66]。当车辆偏移超过200 mm时,视为未进入有效供电范围;随着车辆行驶,当信号检测线圈与信号发射线圈之间的互感值越过零点时,电压由同相变为反相,控制器将车辆即将驶入的发射端连接到主电路,实现供电;而当车辆到达对称点时,控制器断开正在供电的发射端,完成一个供电周期控制,位置检测响应时间可达2.3 ms[66]。
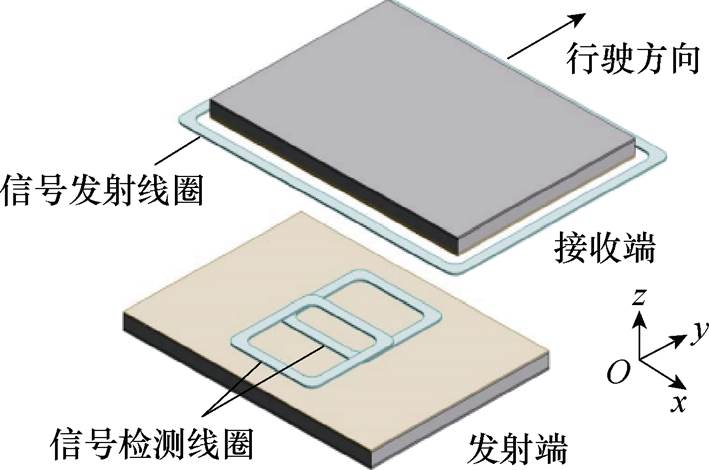
图12 三线圈位置检测方法示意图
Fig.12 Schematic diagram of the three-coil position detection method
2017年,重庆大学在奥克兰方案的基础上做了改进,提出了两线圈位置检测方案[67],在相邻的发射导轨之间放置一个信号检测线圈,并在车辆接收线圈中间安装一个高频信号发射线圈,如图13所示。同时对高频信号发射线圈以及信号检测线圈规格进行优化,采用S-S补偿网络进一步降低车辆端辅助检测装置所占用的空间。通过这种改进,系统仅通过两个辅助线圈就完成了位置检测以及发射导轨的切换,使得系统更加简化和高效。
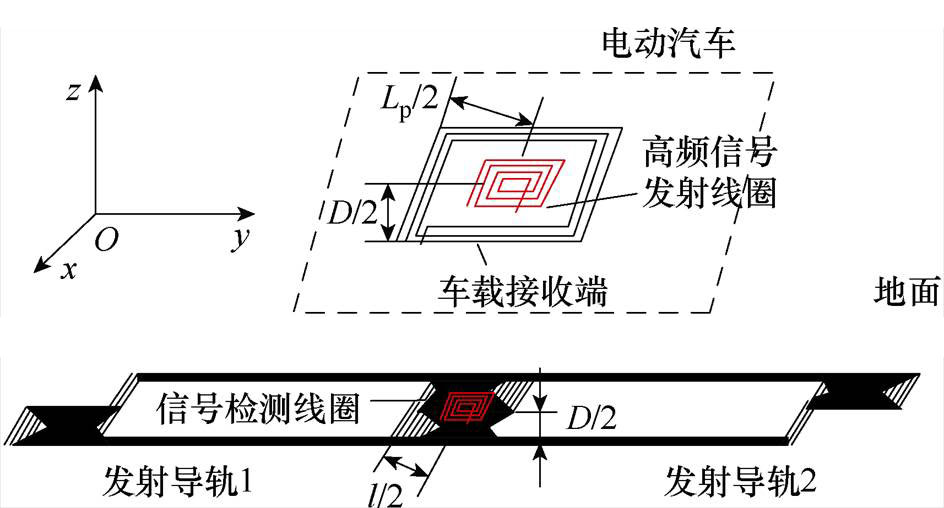
图13 两线圈位置检测方法示意图
Fig.13 Schematic diagram of the double-coil position detection method
2019年,橡树岭国家实验室的D. Patil等针对奥克兰大学、重庆大学等采用传统线圈检测方案无法对高速行驶的电动汽车进行位置检测以及无法对变道进入导轨的车辆及时识别的问题,提出了一种正交十字线圈方案[68],如图14所示。当车辆通过变道进入时,横向检测线圈与发射端之间的耦合系数增大,而纵向检测线圈与发射端的耦合系数较低。当车辆延纵向进入该段发射端时,纵向检测线圈与发射端的耦合系数更高,而横向检测线圈的耦合系数较低。该方案通过比较横向和纵向检测线圈与发射端耦合的大小来控制逆变电源开关,以实现导轨切换的功能,仿真实现了对车速110 km/h车辆的位置检测。这一改进使得系统能够更准确地捕捉车辆位置和方向的变化。
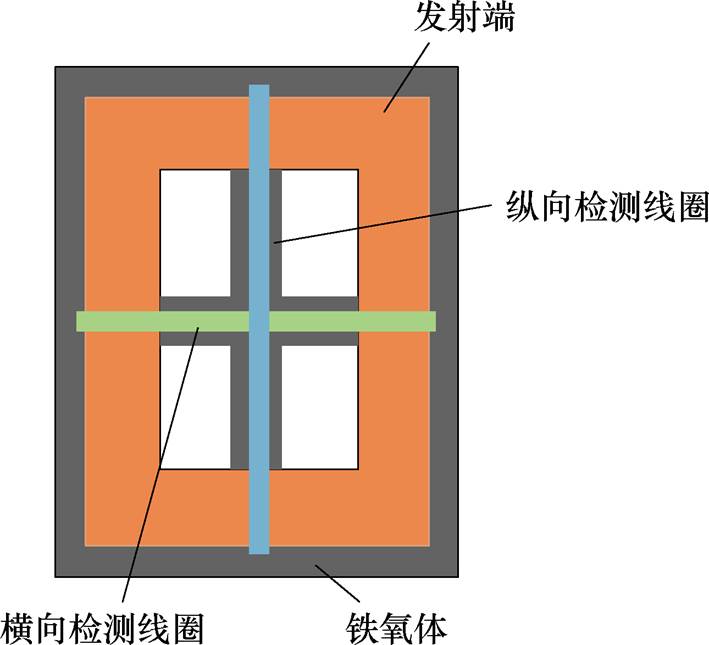
图14 十字线圈位置检测方法示意图
Fig.14 Schematic diagram of the cross-coil position detection method
韩国科学技术院(KAIST)自2015年起对自主线圈对准系统(Autonomous Coil Alignment System, ACAS)进行了一系列创新改进。最初,ACAS利用模糊转向控制技术,通过测量安装在功率接收线圈前左和前右的两个检测线圈之间的电压差,识别接收端与发射导轨之间的横向偏差,通过模糊控制实现自主转向进行校正,并在仿真中分别以80、100、120及140 km/h进行测试,测试结果显示该位置检测系统能够保证其处于横向位置对齐附近,总体结构如图15所示[69]。
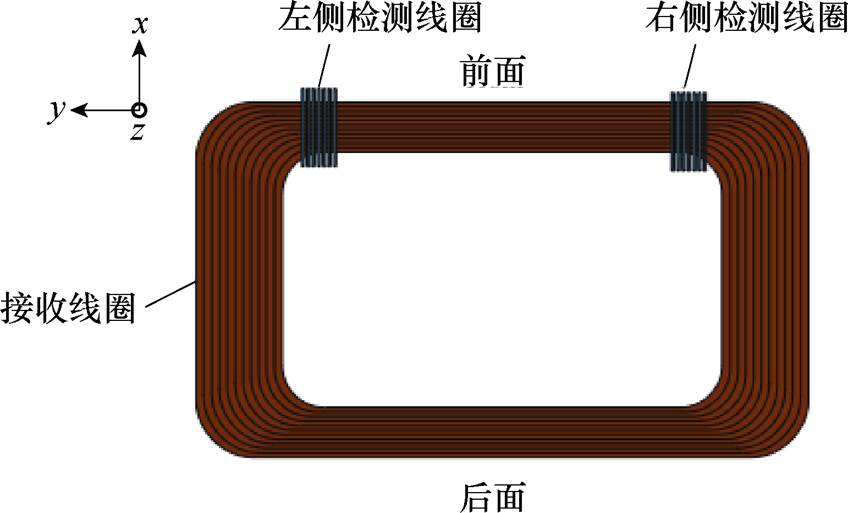
图15 双自主线圈对准系统
Fig.15 Dual autonomous coil alignment system
随后在2017年,KAIST进一步改进了ACAS系统,提出了一种新的传感器线圈设计——单线圈自主对准系统,如图16所示。该系统利用额外的一个检测线圈检测电压相位的变化来检测接收端相对于发射导轨的位置,并通过自动转向功能对车辆的横向位置进行自我调整,减少了检测线圈的数量[70]。
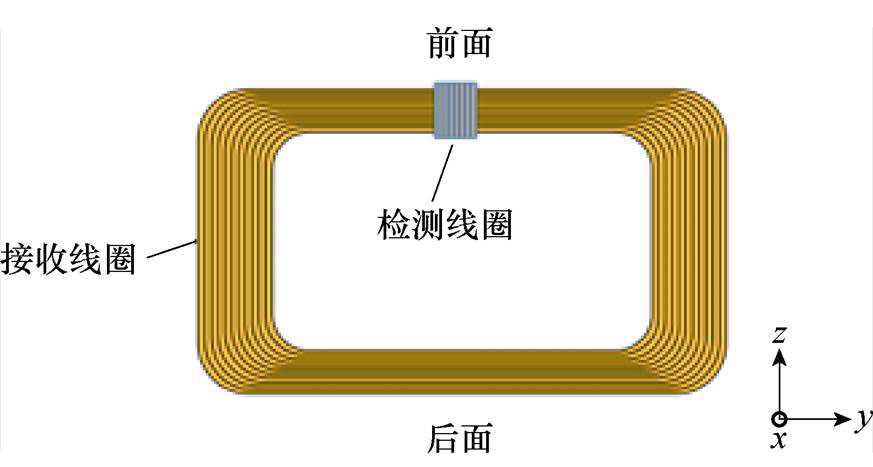
图16 单线圈自主对准系统
Fig.16 Single autonomous coil alignment system
2017年,KAIST提出了使用位置检测线圈计数器(Pickup Coil Counter, PCC)解决动态无线供电系统的列车位置检测问题[71],如图17所示。PCC利用轨道上的检测线圈和列车上接收线圈之间的磁场相互作用来实现列车的检测。列车通过时,接收线圈产生的磁场变化被检测线圈感知,并通过检测电路处理感应电压信号以确定列车的存在。
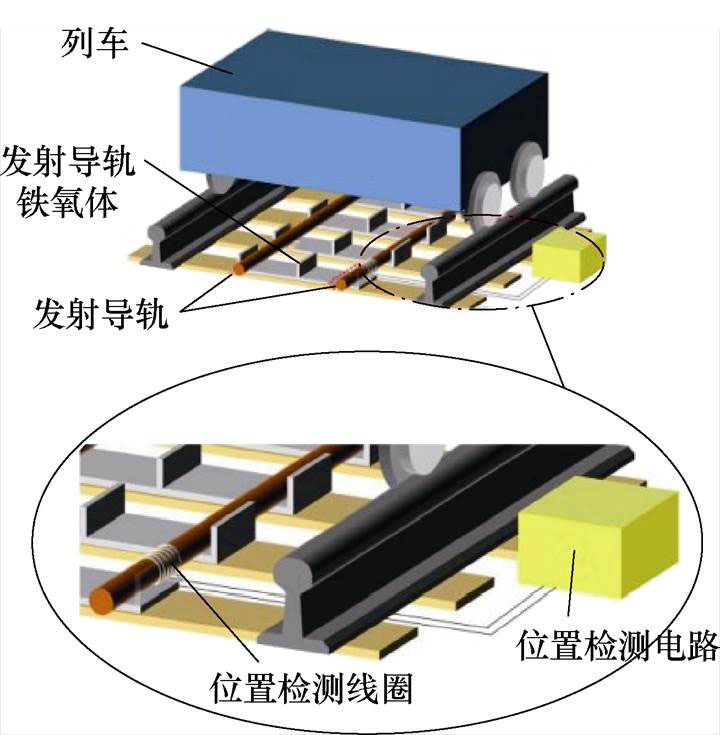
图17 位置检测线圈计数器检测方法示意图
Fig.17 Schematic diagram of the detection method of the pickup coil counter
KAIST于2018年提出了铁氧体计数方法来解决位置检测系统中的误检测和无检测问题。该技术通过对发射导轨中的磁心进行计数,实现了对车辆位置的精准定位,同时,引入了磁心位置识别(Ferrite Position Identification, FPID)单元并对所采集的信号进行编码(左侧为1,右侧为0),来纠正磁心计数器中可能存在的误差[72]。磁心位置识别检测方法示意图如图18所示。
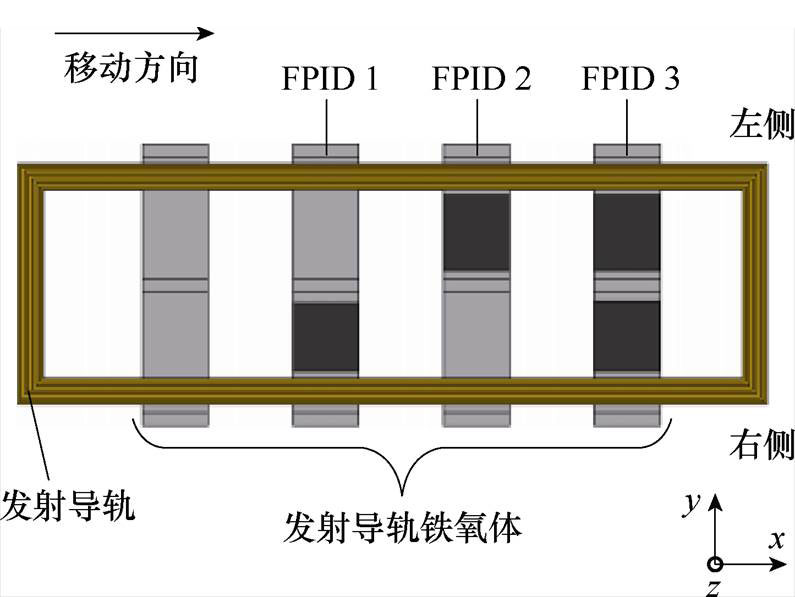
图18 磁心位置识别检测方法示意图
Fig.18 Schematic diagram of the FPID
2019年,KAIST改进了车辆位置检测方法,实现了纵向和横向偏移的同时检测,信号磁心位置检测示意图如图19所示[73]。该方法通过对发射导轨磁心的计数,并监测感应电压降低的次数及其幅度变化,从而精确地确定车辆的位置,并将位置编码为二进制信息进行传输。此外,系统通过比较两个传感器线圈所产生的感应电压差异,进一步判断车辆的偏移量和偏移方向。这一方法在提高偏移检测精度的同时,增强了系统的鲁棒性和实时性,其响应时间可以达到41.9 ms,理论上可用于车速小于400 km/h的位置检测[73]。
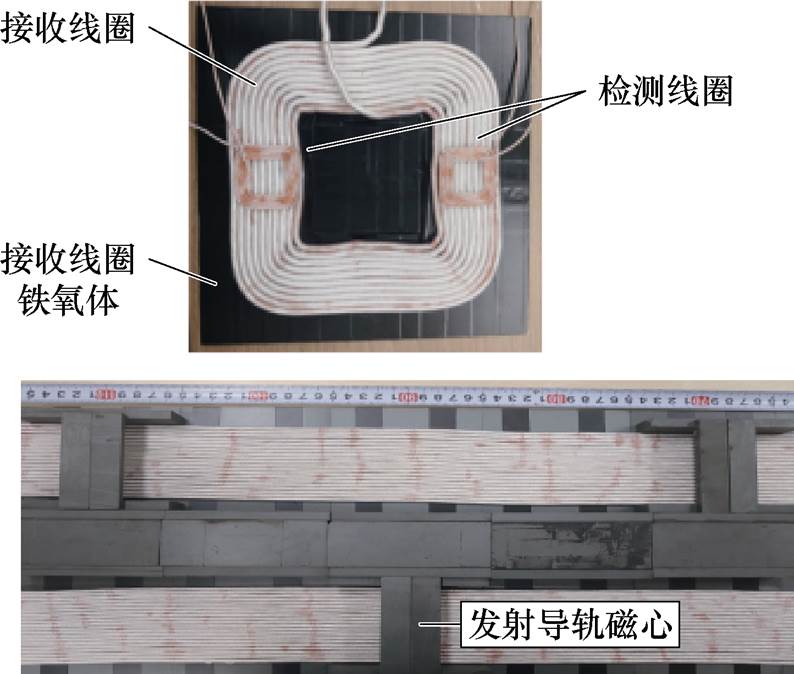
图19 信号磁心位置检测示意图
Fig.19 Schematic diagram of signal core position detection
2018年,美国犹他州立大学提出了一种基于三线圈配置的车辆偏移与速度检测系统,如图20所示。系统通过微控制器实时处理电压信号,并利用不同线圈间的电压差异计算偏移误差,将检测结果显示在图20中的偏移显示屏中,同时结合检测线圈1电压到达峰值的时间与检测线圈2及线圈3电压到达峰值的时间延迟计算车辆的速度。实验证明,该系统在检测车辆偏移位置和速度方面表现优异,能够在地面间隙变化±2.5 cm的范围内将偏移检测误差控制在1 cm以内,其响应时间可以达到5.8 ms[74]。
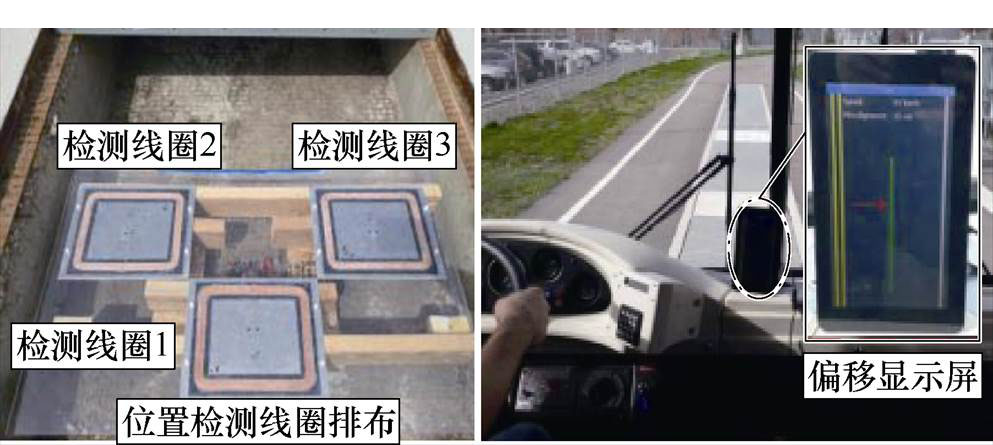
图20 三线圈车辆偏移与速度检测系统
Fig.20 Tri-coil vehicle misalignment and speed detection system
2021年,华南理工大学提出了一种基于四检测线圈结构的动态无线供电位置检测方法,用于检测接收线圈相对于发射导轨的纵向和横向偏移,如图21所示[75]。该方法首先通过理论分析确定了检测线圈的最佳安装数量和位置布局;然后通过对四个检测线圈上的感应电压进行拟合,求得其电压幅值表达式;最后采用牛顿迭代法对感应电压数据进行处理,计算出接收线圈的精确位置坐标[75]。
在磁传感器位置检测技术方面,2017年北京交通大学设计了一种基于磁定位技术的电动汽车动态无线供电系统位置检测方案[76],磁定位位置检测方法示意图如图22所示。该方案在电动汽车上安装永磁体,在两个相邻发射导轨间隙安装两个磁阻传感器,当车辆靠近时,磁阻传感器会检测到由永磁体产生的磁场变化,这些变化的磁场信号被转换成电信号,并通过信号处理电路传回控制器。控制器根据接收到的信号以及两个传感器接收到的信号顺序来确定汽车的精确位置和行驶方向。此系统中永磁体充当信号源,使得磁定位系统能够有效地监测和确定电动汽车的行驶信息,但其易受到周围磁场的影响。
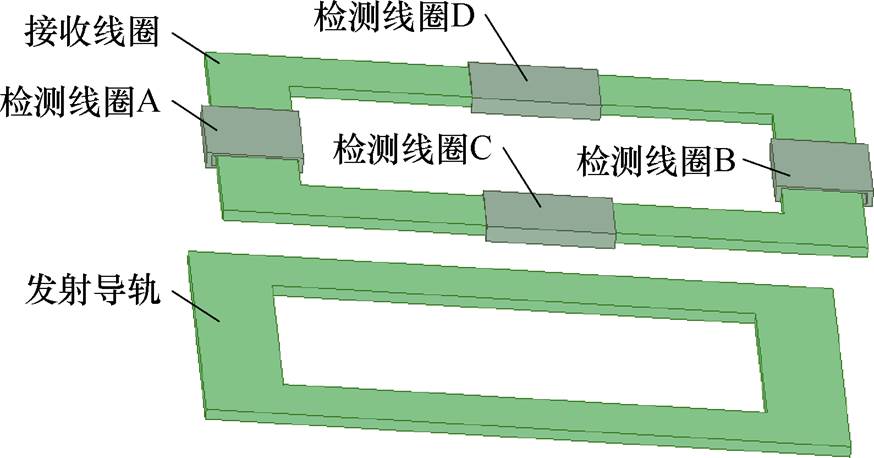
图21 四位置检测线圈结构
Fig.21 Structure of four-position detection coil
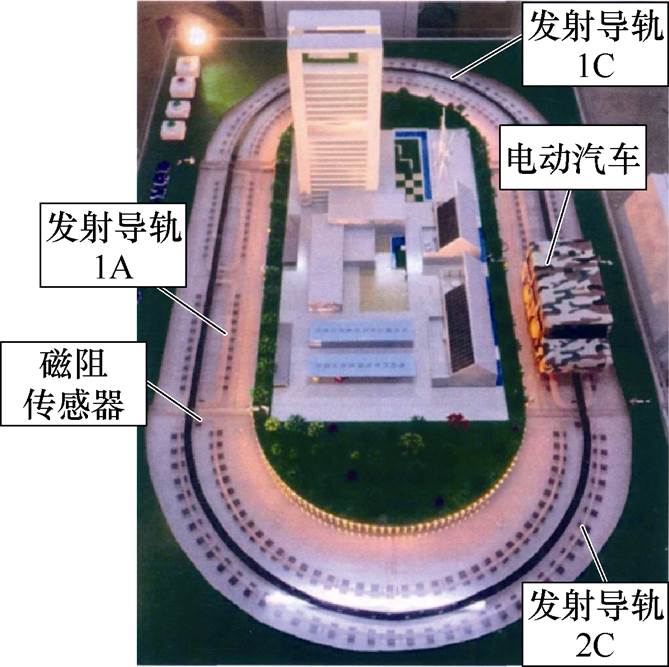
图22 磁定位位置检测方法示意图[76]
Fig.22 Schematic diagram of magnetic positioning detection method[76]
2021年,杜克大学利用车辆上配备的接收端和四个磁传感器,结合六个人工神经网络来实现对车辆的精确定位,磁传感器精确位置检测示意图如图23所示。其中,Bx传感器被配置于其他传感器前方30 cm,用于测量沿发射导轨纵向的磁场。该传感器在探测到磁场峰值时触发车辆横向偏移的检测程序,从而实现了对电动汽车的横向和垂直位置的准确估计。测试结果表明横向位置的检测误差低于1.9%,垂直位置的检测误差低于3.8%,横向偏移检测响应时间低至5 ms[77]。
在射频收发器位置检测技术方面,哈尔滨工业大学在2020年提出了一种基于2.4 GHz射频信号接收强度指示(Received Signal Strength Indication, RSSI)和卡尔曼滤波算法的位置检测方案。该方案设计了车载射频发射模块和地面射频接收模块的软硬件,并在地面射频接收模块上搭载了双射频模块,以提升检测精度和可靠性。同时,为满足对动态无线供电系统地面端的温度监测需求,在地面射频接收模块上搭载了温度检测模块[78]。射频位置检测方法如图24所示。经过实验验证,成功将地面射频接收模块测量的RSSI值转换为车辆位置信息,并使用Kalman滤波器迭代16次后实现快速收敛,位置检测精度达到0.5 m以内
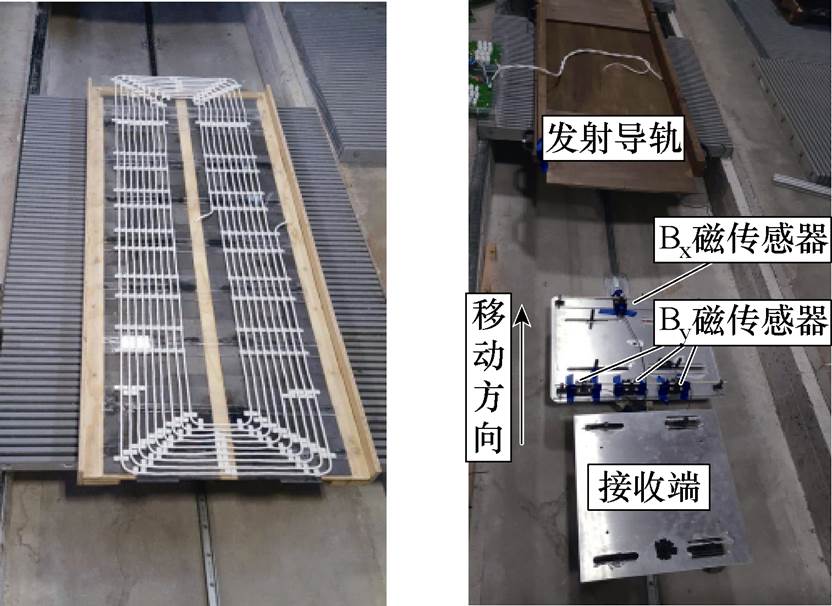
图23 磁传感器精确位置检测示意图
Fig.23 Schematic diagram of precise position detection by magnetic sensor
。
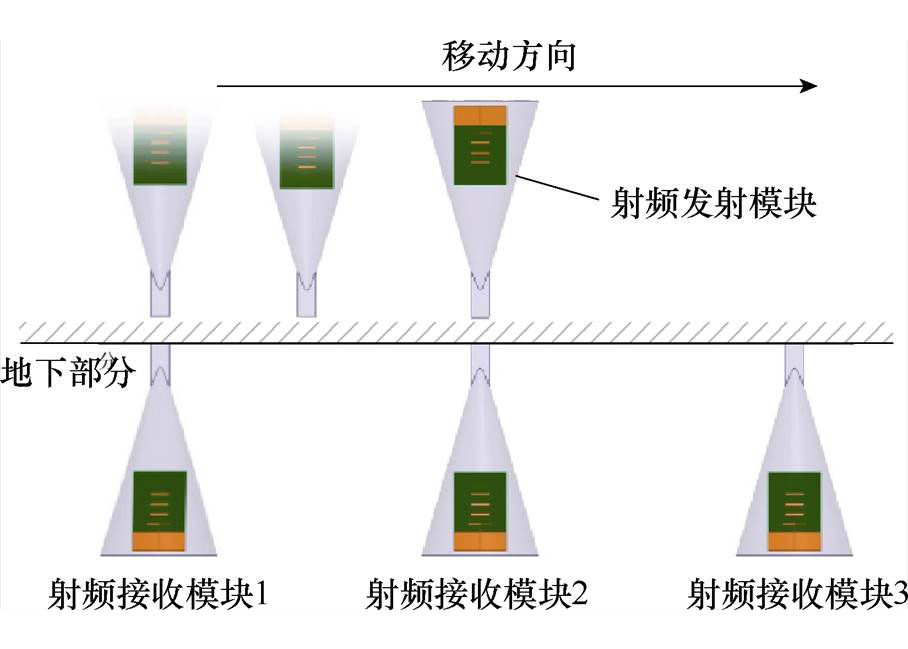
图24 射频位置检测方法
Fig.24 RF position detection method
在基于高清摄像头的位置检测技术方面,深圳大学2020年采用高清摄像头和先进图像处理算法实时捕获道路情景并分析,通过检测图像中的线条和边界,并对其进行聚类处理,准确识别车辆相对于充电网格的位置和方向,高清摄像头位置检测示意图如图25所示。这种基于视觉感知的定位方法能够提供高精度的实时位置反馈,以帮助驾驶员调整车辆位置,保持在网格中心附近,确保车辆在充电车道上的稳定对齐[79]。
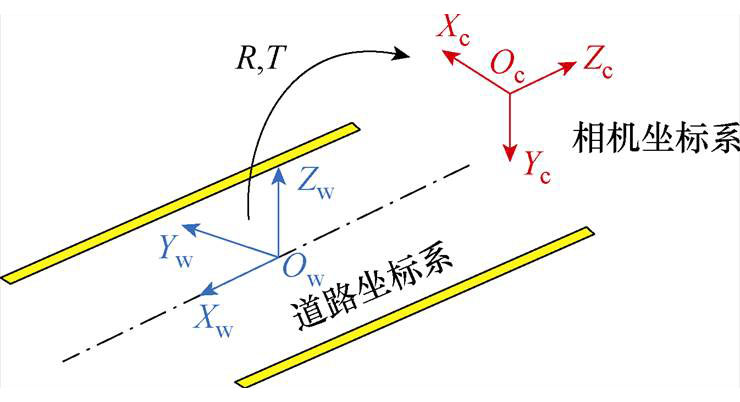
图25 高清摄像头位置检测示意图
Fig.25 Schematic diagram of high-definition camera position detection
为解决动态无线供电系统中的位置检测问题,2021年,武汉理工大学采用一种新的视觉惯性同 时定位与地图构建(Visual Inertial Simultaneous Localization and Mapping, VI-SLAM)方法,其示意图如图26所示[80]。该方法首先将单目视觉和IMU的测量结果进行了集成,采用了图优化的紧密耦合法进行处理。为了模拟真实场景,组装了NVIDIA TX2和MYNT VI-sensor套件,并将MTi300-IMU视为地面真实系统。经过实验验证,这一方法达到了cm级别的精度,其中位置(X、Y、Z方向)的方均根误差分别为0.086、0.092、0.102 m,方向误差分别为2.423°、1.682°、2.501°。
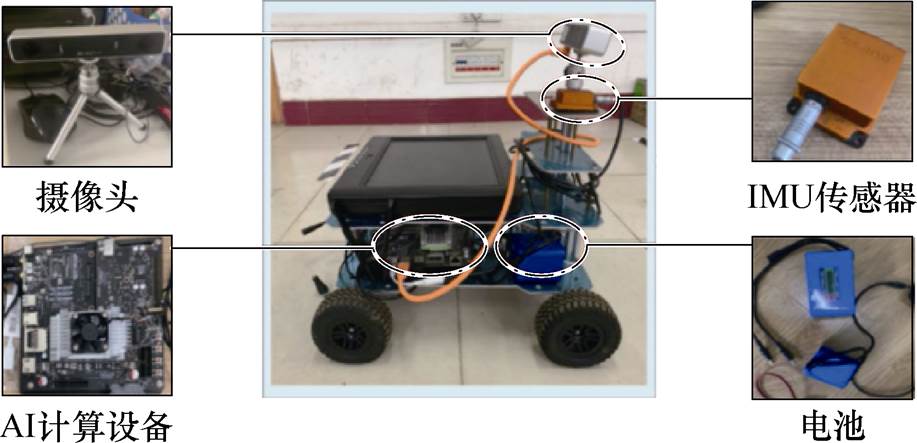
图26 VI-SLAM位置检测示意图
Fig.26 Schematic diagram of VI-SLAM position detection
有辅助检测装置的位置检测技术总结及对比结果见表2。在动态无线供电系统中,辅助线圈检测技术通过变化的互感来精确定位,可以实时响应位置变化,特别适合于对精度要求较高的应用场景。射频收发器技术具有良好的实时性和快速响应,但在多路径或电磁干扰较强的复杂环境中,定位精度一般在0.5 m范围内,这使得射频技术在对精度要求较高的应用场景中受到限制。磁传感器技术因其成本较低且不受光照影响,在对成本敏感的应用中具有一定优势,然而它的定位精度通常不如线圈检测技术,且容易受到周围磁场的影响,这在一定程度上限制了其在高精度要求场景下的应用。高清摄像头技术利用图像分析来实现精确定位,特别在标记清晰、光照充足的环境中效果最佳。尽管如此,这种技术在光照不足或天气条件恶劣时的性能可能会大幅下降,且硬件成本相对较高。
表2 有辅助检测装置的位置检测技术总结及对比
Tab.2 Summary and comparison of position detection technologies with auxiliary detection devices
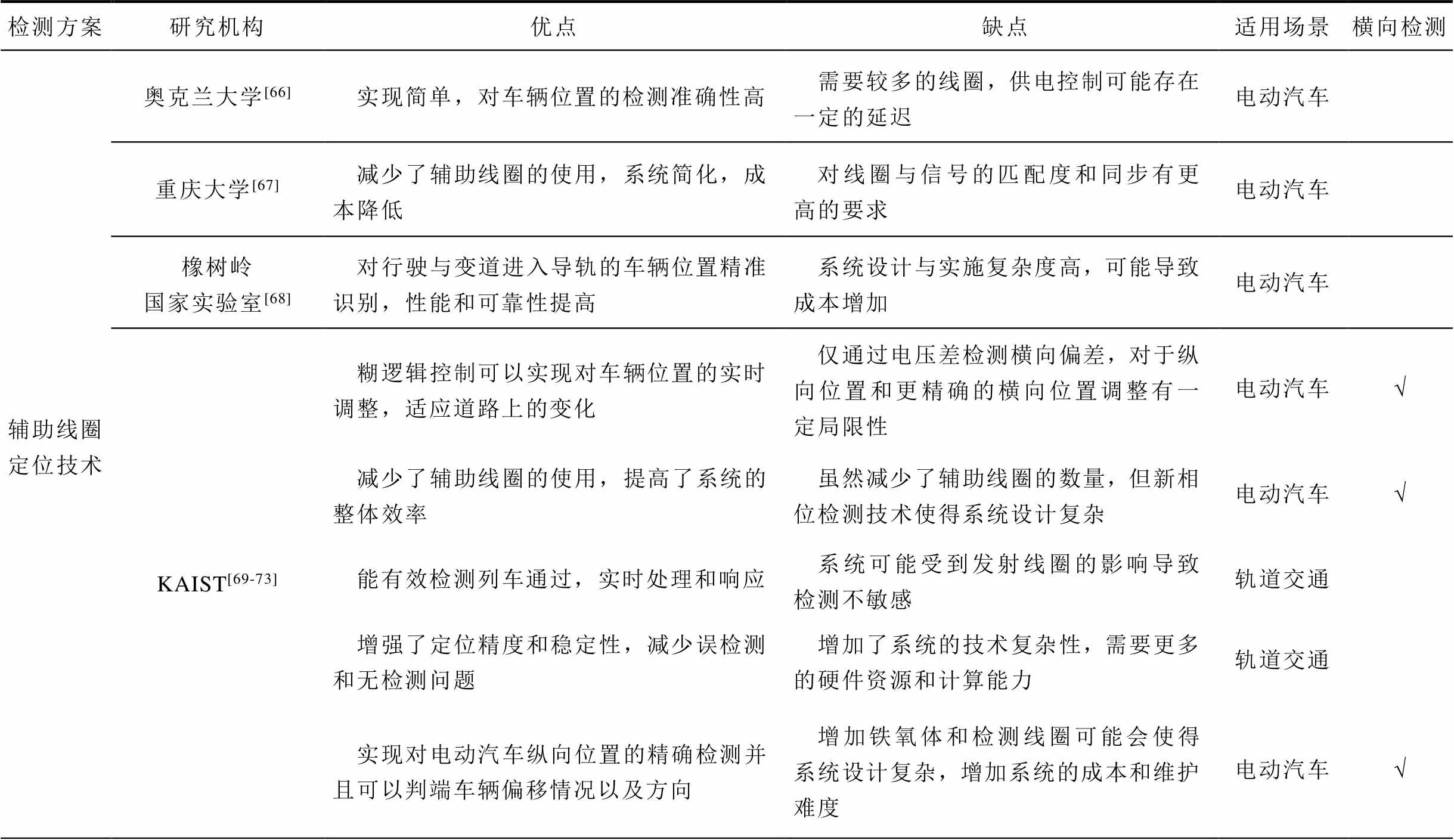
检测方案研究机构优点缺点适用场景横向检测 辅助线圈定位技术奥克兰大学[66]实现简单,对车辆位置的检测准确性高需要较多的线圈,供电控制可能存在一定的延迟电动汽车 重庆大学[67]减少了辅助线圈的使用,系统简化,成本降低对线圈与信号的匹配度和同步有更高的要求电动汽车 橡树岭国家实验室[68]对行驶与变道进入导轨的车辆位置精准识别,性能和可靠性提高系统设计与实施复杂度高,可能导致成本增加电动汽车 KAIST[69-73]糊逻辑控制可以实现对车辆位置的实时调整,适应道路上的变化仅通过电压差检测横向偏差,对于纵向位置和更精确的横向位置调整有一定局限性电动汽车√ 减少了辅助线圈的使用,提高了系统的整体效率虽然减少了辅助线圈的数量,但新相位检测技术使得系统设计复杂电动汽车√ 能有效检测列车通过,实时处理和响应系统可能受到发射线圈的影响导致检测不敏感轨道交通 增强了定位精度和稳定性,减少误检测和无检测问题增加了系统的技术复杂性,需要更多的硬件资源和计算能力轨道交通 实现对电动汽车纵向位置的精确检测并且可以判端车辆偏移情况以及方向增加铁氧体和检测线圈可能会使得系统设计复杂,增加系统的成本和维护难度电动汽车√
(续)
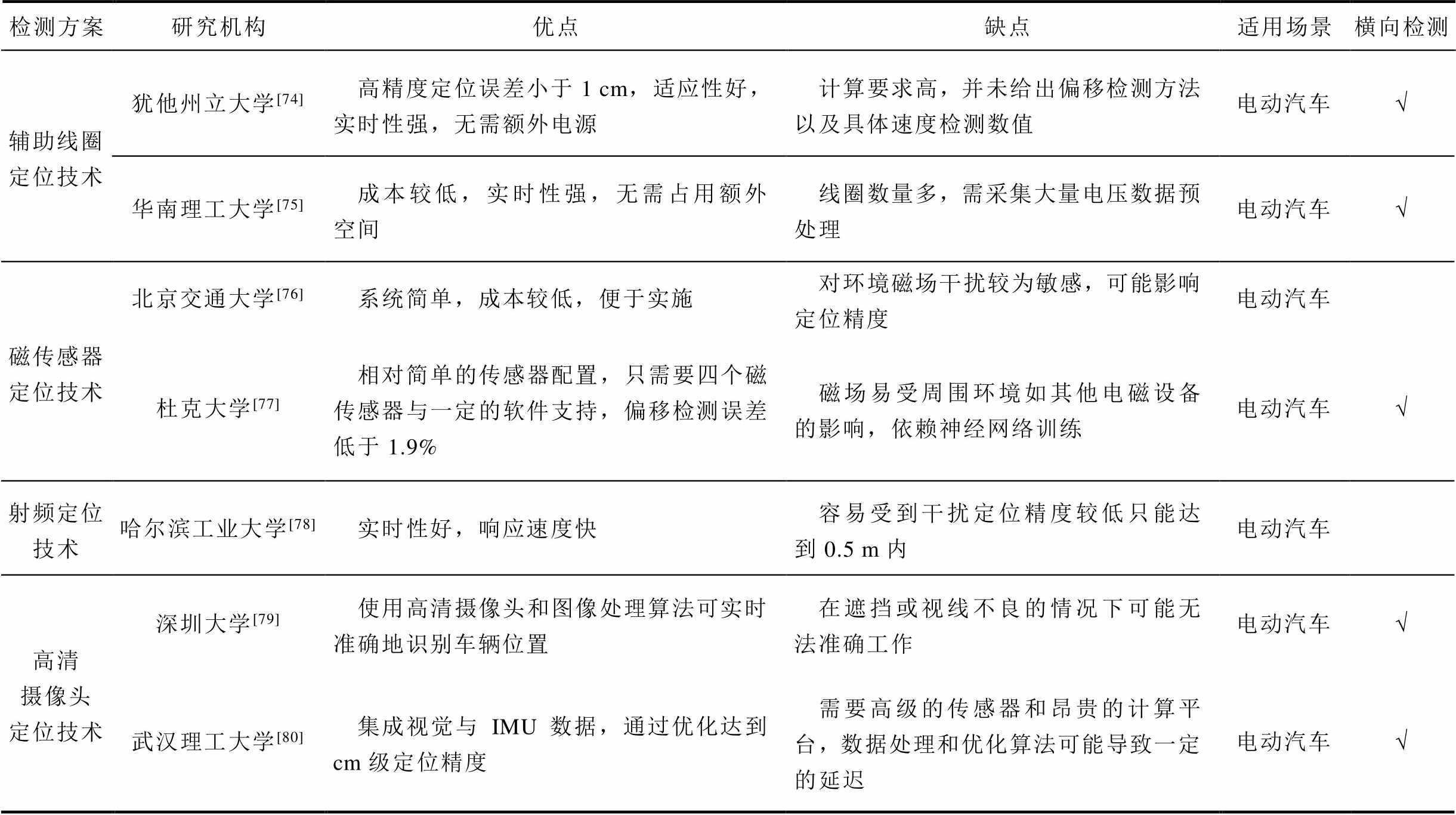
检测方案研究机构优点缺点适用场景横向检测 辅助线圈定位技术犹他州立大学[74]高精度定位误差小于1 cm,适应性好,实时性强,无需额外电源计算要求高,并未给出偏移检测方法以及具体速度检测数值电动汽车√ 华南理工大学[75]成本较低,实时性强,无需占用额外 空间线圈数量多,需采集大量电压数据预处理电动汽车√ 磁传感器定位技术北京交通大学[76]系统简单,成本较低,便于实施对环境磁场干扰较为敏感,可能影响定位精度电动汽车 杜克大学[77]相对简单的传感器配置,只需要四个磁传感器与一定的软件支持,偏移检测误差低于1.9%磁场易受周围环境如其他电磁设备的影响,依赖神经网络训练电动汽车√ 射频定位技术哈尔滨工业大学[78]实时性好,响应速度快容易受到干扰定位精度较低只能达到0.5 m内电动汽车 高清摄像头定位技术深圳大学[79]使用高清摄像头和图像处理算法可实时准确地识别车辆位置在遮挡或视线不良的情况下可能无法准确工作电动汽车√ 武汉理工大学[80]集成视觉与IMU数据,通过优化达到cm级定位精度需要高级的传感器和昂贵的计算平台,数据处理和优化算法可能导致一定的延迟电动汽车√
为了简化位置检测系统,一些专家学者尝试通过检测和分析动态无线供电系统本身的参数及其变化规律判断车辆位置,包括电压、电流和相位等。相较于需要辅助检测装置的位置检测技术,这种方法无需额外的定位设备,简化了系统结构,降低了成本和维护难度,尽管在复杂环境中性能可能稍逊于有辅助装置的技术,但在稳定环境中仍可应用。此外,通过实时检测电压、电流等参数,系统能够及时发现异常情况,如过载、短路或电压波动,避免潜在的安全隐患。
在基于发射端参数辨识的无辅助检测装置位置检测技术方面,2013年北卡罗来纳州立大学的研究团队提出了一种新型动态无线供电系统拓扑结构,该拓扑结构利用接收端反射阻抗的变化来优化发射端与接收端之间的耦合效率,并动态调整发射端工作状态。当接收端与发射端耦合达到最优状态时,接收端的反射阻抗增加,从而提高该发射端的电流输出。接收端离开后,发射端因反射阻抗的降低而停止工作。这一基于接收端反射阻抗变化的自适应调节机制,无需复杂的屏蔽电路、开关、通信和电子设备,实现了高效且简洁的切换功能,提升了系统的整体性能[81]。基于反射阻抗的位置检测方法示意图如图27所示。
图27 基于反射阻抗的位置检测方法示意图
Fig.27 Schematic diagram of position detection method based on reflection impedance
2015年美国犹他州立大学通过分析发射线圈的输出情况以及接收线圈的反射阻抗,来间接检测接收线圈的相对位置,如图28所示。系统通过调相控制技术动态调整发射线圈的电压相位,使之与接收线圈的移动位置相适应。即使在接收线圈和发射线圈未完全对齐的情况下,也能保持相对较高的能量传输效率,并以0.4 m/s的速度进行了实验验证[82]。
图28 基于调相控制的动态无线供电系统
Fig.28 Dynamic wireless power transfer system based on phase-modulation control
2022年博洛尼亚大学提出了一种基于阵列输入阻抗测量的接收端位置检测方法。该方法通过监测阵列输入阻抗的幅值和相位变化,推断接收端的相对位置,基于阵列输入阻抗的位置检测示意图如图29所示。当接收端与阵列发射端发生电磁耦合时,输入阻抗会呈现周期性波动,这些波动与接收端位置具有明确的对应关系。通过对幅值变化的微分分析,可以识别阻抗符号变化,进而判断接收端与发射端之间的耦合状态。结合阵列几何模型及输入阻抗特性,通过位置估算公式,可以推算接收端的位置。该方法充分利用了阵列输入阻抗的周期性和单调性特征,具有较高的空间分辨率和准确度[83]。
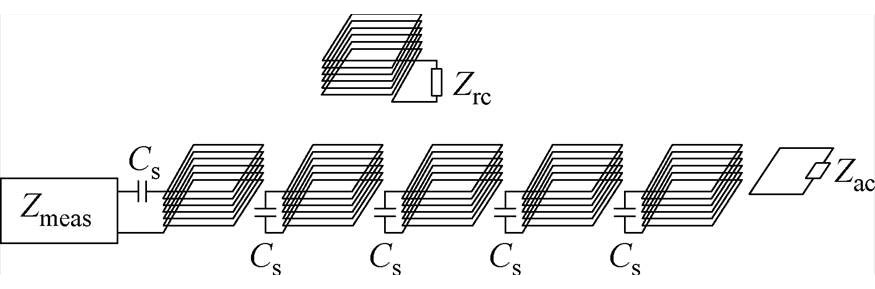
图29 基于阵列输入阻抗的位置检测示意图
Fig.29 Schematic of position detection based on array input impedance
2016年,奥克兰大学提出了一种基于车辆自由谐振电流变化的位置检测方法,利用车辆运动时在未开通的邻近发射端产生的自由谐振电流的变化,当车辆从一个发射端移动至另一个发射端之间时,由于接收端与发射端之间耦合的增加,未开通的邻近发射端中的自由谐振电流会显著增加至原来的3倍,以此明确判断车辆位置。该方法具备简单、可靠和成本低的特点,在6 km/h的行驶速度下进行了实验验证[84]。基于自由谐振电流的位置检测示意图如图30所示。
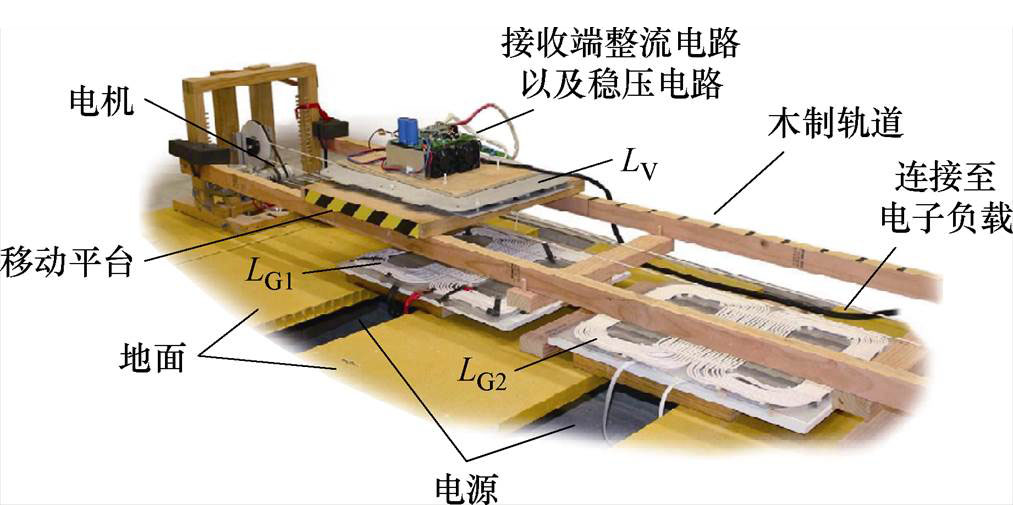
图30 基于自由谐振电流的位置检测示意图
Fig.30 Schematic diagram of position detection based on free resonant current
在2021年,东京大学的团队提出了一种基于车辆侧电压脉冲的无传感器车辆检测方法,如图31所示。当车辆接近功率传输区域时,基于GPS信息,车辆侧线圈开始发射特定频率和幅度的电压脉冲。这些脉冲在发射线圈中引起感应电流,系统通过监测这种电流变化来检测车辆的位置,当检测到发射线圈电流超过对应阈值时开通本段发射线圈。文中在5 km/h的速度下进行了验证[85]。
图31 基于电压脉冲的位置检测示意图
Fig.31 Schematic diagram of position detection based on voltage pulse
2016年,武汉大学采用了实时相位感知技术解决接收端位置检测问题。该技术通过分析发射端输入阻抗的相位,结合输入端阻抗的相位与发射端和接收端相对位置的关系,实现了对车辆位置的实时感知,无需额外传感器和通信设备[86]。湖北大学在2023年进一步采用了相位变化进行位置检测,如图32所示。其成功地在电路的发射端检测到离开通电线圈区域时的相位变化,并引入检测信号进行车辆逼近检测,从而提高了检测精度,同时分析了系统鲁棒性和磁饱和度,并建立缩小的实验室平台验证了该方法的有效性[87]。
图32 基于轨道相位感知的定位方式
Fig.32 Position detection based on phase sensing
2024年,弗罗里达国际州立大学通过收集电动汽车的实时车速、离地间隙及发射电流等数据,基于多种机器学习算法(如随机森林、决策树、K近邻、神经网络等)开展了电动汽车位置检测的研究[88]。经过数据预处理,采用多种算法进行训练和评估,并通过交叉验证与误差分析确定了最优模型。实验结果表明,随机森林算法在精度和误差控制方面表现最佳,该方法通过对模型参数的优化及实时数据的分析,能够实现高精度的位置检测。
2021年美国犹他州立大学提出了一种基于接收端功率的车辆位置检测方法,该方法示意图如图33所示。其利用现有的嵌入式发射线圈以及功率模块建立了一个精确的检测系统。提出了一种基于Sigmoid函数的控制算法来准确控制发射端的导通和停止时间,并在线圈之间的最大耦合时提供所需的能量,实现在两种状态之间的稳定且与速度无关的平滑过渡,同时对齐和未对齐的情况具有快速的动态响应,并以1 m/s的速度进行了实验验证[89]。
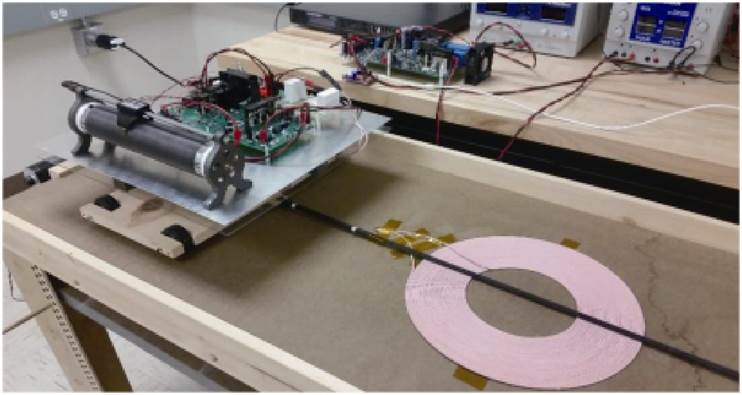
图33 基于接收端功率的位置检测示意图
Fig.33 Schematic diagram of position detection based on receiver power
2024年武汉大学提出了一种基于双侧磁集成的接收端位置检测方法,该方法利用LCC-LCC补偿拓扑集成电感线圈来实现经济高效的接收端检测,而无需额外的传感器或激励电路。基于磁集成的位置检测示意图如图34所示[90]。在发射端和接收端分别设计了电磁线圈和双极集成线圈,在不影响WPT性能的情况下通过对补偿线圈的复用实现接收端位置检测。通过对集成线圈的关键参数进行优化,以实现精确的接收端定位。实验结果表明,通过合理选择采样间隔可以减轻测量抖动,从而避免了较大的定位误差,其响应时间可以达到7.6 ms[90]。
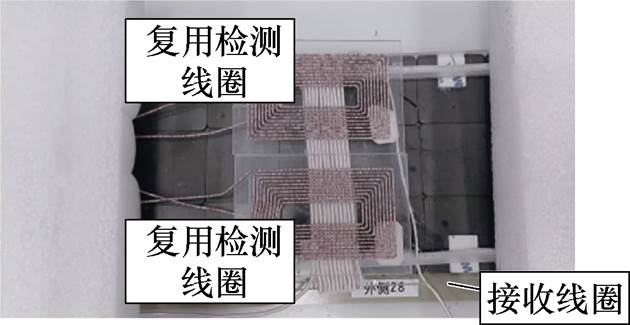
图34 基于磁集成的位置检测示意图
Fig.34 Schematic diagram of position detection based on magnetic integrated
无辅助检测装置位置检测技术总结及对比结果见表3。目前所采用的无辅助检测装置的纵向位置检测技术由于其不需要额外的设备,其成本往往较低,系统整体复杂度降低,从而减少了潜在的系统故障点和维护成本。而且由于基于发射端参数辨识的纵向位置检测技术不需要远程通信,响应速度往往较快。然而这种方法要求检测算法必须具有极高的精确度和鲁棒性,以便能够在缺乏外部辅助设备的情况下准确地进行位置检测。
表3 无辅助检测装置位置检测技术总结及对比
Tab.3 Summary and comparison of position detection technology without auxiliary detection device
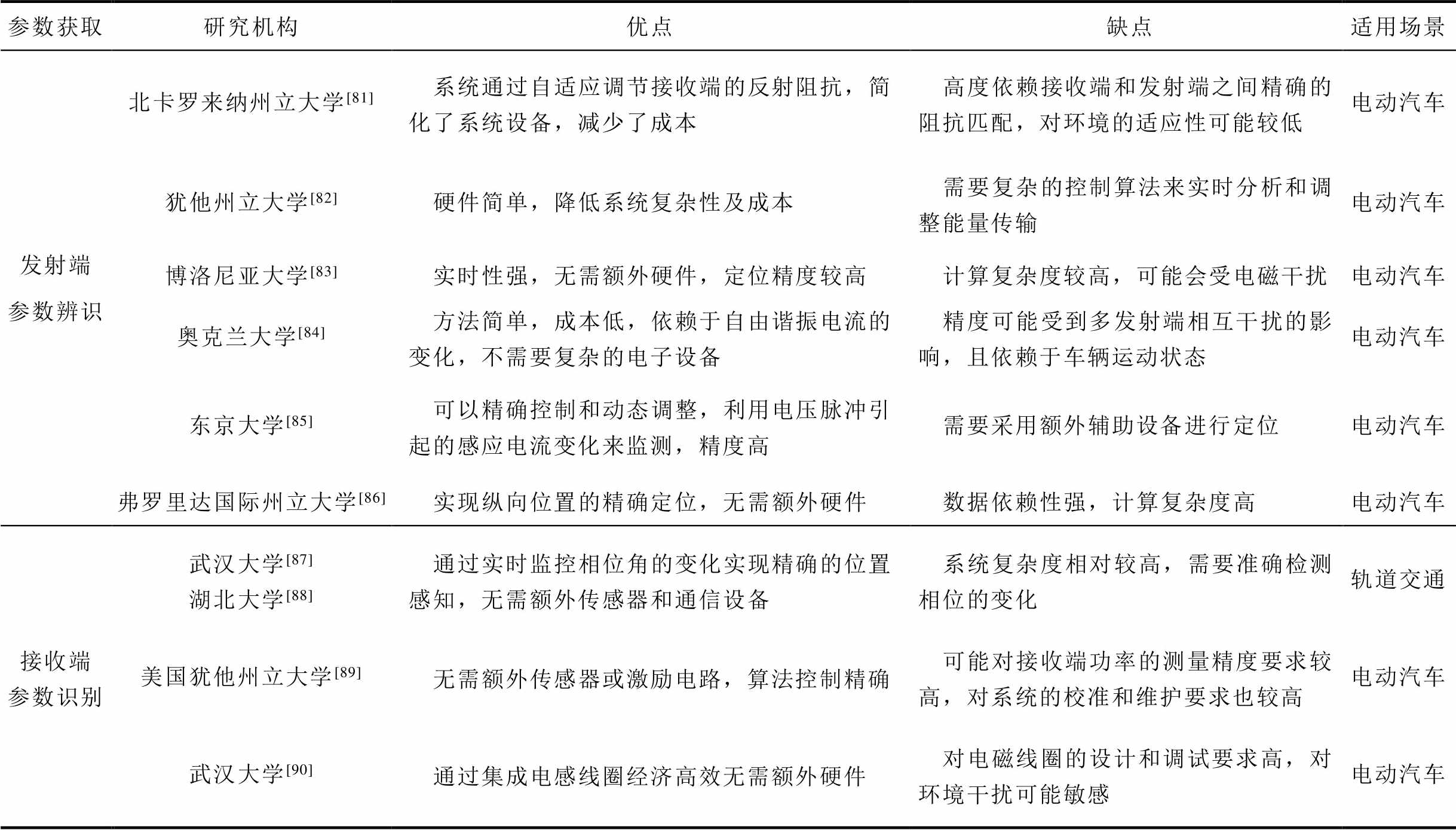
参数获取研究机构优点缺点适用场景 发射端参数辨识北卡罗来纳州立大学[81]系统通过自适应调节接收端的反射阻抗,简化了系统设备,减少了成本高度依赖接收端和发射端之间精确的阻抗匹配,对环境的适应性可能较低电动汽车 犹他州立大学[82]硬件简单,降低系统复杂性及成本需要复杂的控制算法来实时分析和调整能量传输电动汽车 博洛尼亚大学[83]实时性强,无需额外硬件,定位精度较高计算复杂度较高,可能会受电磁干扰电动汽车 奥克兰大学[84]方法简单,成本低,依赖于自由谐振电流的变化,不需要复杂的电子设备精度可能受到多发射端相互干扰的影响,且依赖于车辆运动状态电动汽车 东京大学[85]可以精确控制和动态调整,利用电压脉冲引起的感应电流变化来监测,精度高需要采用额外辅助设备进行定位电动汽车 弗罗里达国际州立大学[86]实现纵向位置的精确定位,无需额外硬件数据依赖性强,计算复杂度高电动汽车 接收端参数识别武汉大学[87]湖北大学[88]通过实时监控相位角的变化实现精确的位置感知,无需额外传感器和通信设备系统复杂度相对较高,需要准确检测相位的变化轨道交通 美国犹他州立大学[89]无需额外传感器或激励电路,算法控制精确可能对接收端功率的测量精度要求较高,对系统的校准和维护要求也较高电动汽车 武汉大学[90]通过集成电感线圈经济高效无需额外硬件对电磁线圈的设计和调试要求高,对环境干扰可能敏感电动汽车
动态无线供电技术为电动汽车的能量供给方式提供了颠覆性的解决方案,为了提升系统的效率及安全性,采用多段导轨阵列排布、根据车辆位置灵活选通成为必要手段。本文综述了当前动态无线供电系统中位置检测技术的研究进展,重点分析了不同检测方式的分类、特点以及关键问题,整体来看其检测精度、响应速度、成本和环境适应性仍有待提升,建议从以下几方面考虑。
1)研究无辅助检测装置的横向位置检测技术
纵向位置检测主要用于实现发射导轨的分段切换,确保供电的稳定性和效率。目前纵向检测技术的发展相对成熟,包括有辅助检测装置和无辅助检测装置两类。横向位置检测旨在纠正车辆在行驶过程中的横向偏移,防止传输效率下降或供电中断。由于横向偏移持续存在且对供电性能影响较大,其检测需要更高的精度和实时性,目前多采用有辅助检测装置实现。
为了进一步提升系统的集成度并降低成本,研究如何利用动态无线供电系统的电磁特性,尤其是通过监测发射端和接收端的电气参数(如电压、电流、相位等)来实现无辅助装置的横向位置快速检测,成为一个重要的研究方向。具体而言,可以通过研究电磁场的强度、分布等与车辆横向位置的关系,建立相应的数学模型,同时利用先进的信号处理技术对检测到的电磁信号进行分析,以提高横向位置检测的准确性和实时性。此外,针对不同结构的发射端,应设置具体的性能指标(如检测精度、响应时间等)和评估标准,通过实验数据来评价横向位置检测技术的实际表现。
考虑到智能交通和自动驾驶技术的迅猛发展,未来还应探索如何将无辅助装置的横向位置检测技术扩展到其他应用领域。这包括在复杂的交通环境中进行实时横向位置校准,以及与其他车载传感系统的集成与联动。通过更精确地捕捉电磁场中的微小变化,并通过算法优化实时处理这些数据,不仅可以提高检测精度和反应速度,还能推动本技术的实用化,并为智能化、自动化的交通系统提供重要支持。
2)动态无线供电位置检测技术与车辆定位系统充分融合
动态无线供电位置检测技术中,有辅助检测装置的方法定位精度高、实时性好,适用于对位置检测要求严苛的应用场景。但同时增加了系统的复杂度和成本,安装和维护难度较大,某些传感器(如摄像头、磁传感器)可能受环境因素(如光照、温度、磁场干扰)影响。基于电磁耦合的无辅助检测装置的方法降低了系统成本和复杂度,易于维护,但对算法的精确度要求较高,易受系统噪声和环境干扰的影响。
考虑到现有电动汽车通常都配备了车辆定位系统,为了克服单一技术的局限性,可以采用多种定位方式相融合的手段将惯性导航、卫星定位、磁定位、视觉定位等多种技术相结合,取长补短,提升系统的定位精度和实时性:①将视觉定位与UWB技术融合:视觉定位通过分析摄像头捕捉的图像数据来确定位置和方向,而UWB技术通过测量无线信号的时间延迟来提供精确的距离测量。在复杂环境下将这两种技术相融合可以增强定位的精度、鲁棒性、实时性和部署的灵活性。②将GPS与惯性测量单元(IMU)融合:GPS提供精确的全球定位信息,而IMU通过加速度计和陀螺仪提供车辆的即时加速度和方向变化信息。这种融合能够在GPS信号丢失时(如隧道内或城市高楼环绕区域)依靠IMU维持定位和导航的连续性。同时在多传感器融合的过程中,可以使用如扩展卡尔曼滤波或粒子滤波等算法,这些算法能够处理来自不同传感器的信息,并生成一个综合的位置估计。
此外,应重点研究在不同的天气、路况和城市环境下,如何提升位置检测系统的抗干扰能力,开发对环境变化不敏感的检测方法,确保系统在各种条件下都能稳定运行。同时可以考虑设计一个模块化的传感器融合框架,允许新传感器的集成和现有传感器的升级,为促进该技术的发展应建立一套全面的测试和验证流程,评估融合技术在各种环境和操作条件下的性能。包括实车测试、模拟器测试和实验室测试,测试标准应包括定位精度、成本、系统响应时间、环境适应能力等。
3)基于大数据和智能算法的位置检测技术
传统的位置检测算法主要依赖数学模型和电磁理论,如基于互感变化、相位分析、信号电压电流监测等方法,其理论成熟,但是计算相对复杂,模型建立难度大,无法实现精确的位置检测。人工智能,特别是深度学习和机器视觉技术的应用,为位置检测带来了新的可能性。
通过使用深度学习算法,如卷积神经网络(Convolutional Neural Networks, CNN)或循环神经网络(Recurrent Neural Network, RNN)等,可以处理和分析大量的传感器数据及电路参数,自动识别和学习数据中的模式和特征。这样不仅可以提高横向和纵向位置检测的精度,也可以处理复杂环境下的数据,如不同光照和天气条件下的视觉信息。可以预见,随着计算能力的提升和算法的优化,AI技术将可以优化多传感器数据融合过程,通过整合来自视觉、雷达等传感器的信息,提供更加准确的位置估计。未来利用大数据可以训练AI模型以自适应地调整和优化算法参数,实现更高精度的位置检测。例如,使用深度学习或强化学习方法,系统可以在实际操作中不断学习并改进其定位策略。虽然AI和机器学习提供了高精度的位置检测能力,但依赖大量的数据和高性能计算资源。应该进一步研究探讨如何优化模型以减少对计算资源的需求,并提高算法的效率。同时应开发轻量级的机器学习模型和边缘计算解决方案,以支持快速响应和实时数据处理的需求。
本文对电动汽车动态无线供电系统位置检测技术进行了全面综述,对其检测原理、技术分类、实现方案及特点进行了详细分析,讨论了面临的关键问题和发展趋势。得到主要结论如下:
1)现阶段车辆的定位方式包括全球卫星导航系统定位(GNSS)、惯性导航系统定位(INS)、地图匹配定位、无线通信定位、磁定位以及视觉定位等多种,其普遍存在定位精度以及实时性等方面的问题,难以直接应用到动态无线供电系统位置检测中,需要多种方法融合使用。
2)动态无线供电系统位置检测技术可以分为有辅助检测装置的纵向/横向位置检测技术、无辅助检测装置的纵向位置检测技术。其中无辅助检测装置技术在成本、功耗等方面具有优势,但在复杂环境下的适应性较有辅助装置技术略低。而有辅助检测装置技术往往具有较高的精度和可靠性,适用于各种复杂环境下的应用场景,但往往会占用一定的空间并且提高系统成本。
3)动态无线供电系统位置检测技术的成熟和应用,必须解决检测精度、响应速度、成本和环境适应性等问题。这些问题的解决可从研究无辅助检测装置的横向位置检测技术、与车辆定位系统充分融合、结合大数据和智能算法等多方面加以考虑。
参考文献
[1] Ruddell S, Madawala U K, Thrimawithana D J. A wireless EV charging topology with integrated energy storage[J]. IEEE Transactions on Power Electronics, 2020, 35(9): 8965-8972.
[2] 孙天, 宋贝贝, 崔淑梅, 等. 电动汽车无线充电系统接收端位置大范围唯一性辨识系统设计[J]. 电工技术学报, 2024, 39(21): 6626-6635, 6792.
Sun Tian, Song Beibei, Cui Shumei, et al. Design of accurate position detection system applied to large misalignment range for electric vehicle wireless charging system[J]. Transactions of China Elec- trotechnical Society, 2024, 39(21): 6626-6635, 6792.
[3] Geng Yuyu, Yang Zhongping, Lin Fei. Design and control for catenary charged light rail vehicle based on wireless power transfer and hybrid energy storage system[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 7894-7903.
[4] Ruddell S, Madawala U K, Thrimawithana D J. Dynamic WPT system for EV charging with integrated energy storage[J]. IET Power Electronics, 2019, 12(10): 2660-2668.
[5] Nguyen H T, Alsawalhi J Y, Al Hosani K, et al. Review map of comparative designs for wireless high-power transfer systems in EV applications: maximum efficiency, ZPA, and CC/CV modes at fixed resonance frequency independent from coupling coefficient[J]. IEEE Transactions on Power Elec- tronics, 2022, 37(4): 4857-4876.
[6] Jeong S, Jang Y J, Kum D, et al. Charging automation for electric vehicles: is a smaller battery good for the wireless charging electric vehicles?[J]. IEEE Transa- ctions on Automation Science and Engineering, 2019, 16(1): 486-497.
[7] Wang Hongjie, Pratik U, Jovicic A, et al. Dynamic wireless charging of medium power and speed electric vehicles[J]. IEEE Transactions on Vehicular Tech- nology, 2021, 70(12): 12552-12566.
[8] 刘祺, 薛明, 章鹏程, 等. 基于无线充电系统的多模块扩展均压技术研究与设计[J]. 电工技术学报, 2024, 39(22): 6980-6989.
Liu Qi, Xue Ming, Zhang Pengcheng, et al. Modular extensible voltage equalization based on wireless charging system[J]. Transactions of China Electro- technical Society, 2024, 39(22): 6980-6989.
[9] 孙瀛, 周天, 宋凯, 等. 提升无线充电异物检测系统灵敏度的高阶复合谐振拓扑[J]. 电工技术学报, 2023, 38(6): 1541-1552.
Sun Ying, Zhou Tian, Song Kai, et al. Design of high- order composite resonant topology for improving the sensitivity of foreign object detection system[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1541-1552.
[10] 李中启, 张晨曦, 王建斌, 等. 基于变频重构S/SP拓扑的无线电能传输系统恒流恒压研究[J]. 电工技术学报, 2024, 39(15): 4718-4732.
Li Zhongqi, Zhang Chenxi, Wang Jianbin, et al. Research on constant current and constant voltage of WPT system based on variable frequency recon- figuration S/SP topology[J]. Transactions of China Electrotechnical Society, 2024, 39(15): 4718-4732.
[11] 徐先峰, 吴慧玲, 杨雄政, 等. 空间约束下电动汽车无线充电系统磁耦合结构优化[J]. 电工技术学报, 2024, 39(12): 3581-3588.
Xu Xianfeng, Wu Huiling, Yang Xiongzheng, et al. Optimization of magnetically coupled structure of wireless charging system for electric vehicles under space constraint[J]. Transactions of China Elec- trotechnical Society, 2024, 39(12): 3581-3588.
[12] 陈志鑫, 张献, 沙琳, 等. 基于频率调节的电动汽车无线充电互操作性提升方法研究[J]. 电工技术学报, 2023, 38(5): 1237-1247.
Chen Zhixin, Zhang Xian, Sha Lin, et al. Research on improving interoperability of electric vehicle wireless power transfer based on frequency adjustment[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1237-1247.
[13] 闻枫, 王磊, 张翔, 等. 阵列式无线电能传输系统自适应区域划分定位策略[J]. 电工技术学报, 2024, 39(24): 7674-7687.
Wen Feng, Wang Lei, Zhang Xiang, et al. Adaptive region division positioning strategy for array-based wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2024, 39(24): 7674- 7687.
[14] Wang Yuntao, Luan H T, Su Zhou, et al. A secure and efficient wireless charging scheme for electric vehicles in vehicular energy networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(2): 1491-1508.
[15] Machura P, De Santis V, Li Quan. Driving range of electric vehicles charged by wireless power transfer[J]. IEEE Transactions on Vehicular Tech- nology, 2020, 69(6): 5968-5982.
[16] 葛凯梁, 仇钧, 朱海. 基于中继线圈的电动汽车静态无线充电系统抗偏移性能提升研究[J]. 电源学报, 2023, 21(6): 35-42.
Ge Kailiang, Qiu Jun, Zhu Hai. Research on improvement of anti-misalignment capacity of static wireless charging system for electric vehicles based on relay coil[J]. Journal of Power Supply, 2023, 21(6): 35-42.
[17] 赵玮, 曲小慧, 连静, 等. 一种具有高抗偏移特性的通用复合式IPT耦合器[J]. 中国电机工程学报, 2022, 42(20): 7343-7352.
Zhao Wei, Qu Xiaohui, Lian Jing, et al. A universal hybrid IPT coupler with high tolerance to pad misalignment[J]. Proceedings of the CSEE, 2022, 42(20): 7343-7352.
[18] 胡鹏, 杨庆胜, 王宁, 等. SS型PT对称磁耦合无线电能传输系统特性分析[J]. 电源学报, 2023, 21(6): 43-48.
Hu Peng, Yang Qingsheng, Wang Ning, et al. Characteristic analysis of SS topological PT symmet- rical magnetic coupling wireless power transfer system[J]. Journal of Power Supply, 2023, 21(6): 43-48.
[19] 李志文, 葛恩顺, 马川, 等. 一种双L型抗偏移无线传能线圈及谐振网络电路[J]. 电工技术, 2024(15): 55-57.
Li Zhiwen, Ge Enshun, Ma Chuan, et al. A double L-shaped anti-offset wireless power transmission coil and resonant network circuit[J]. Electric Engineering, 2024(15): 55-57.
[20] Dayerizadeh A, Feng Hao, Lukic S M. Dynamic wireless charging: reflexive field containment using saturable inductors[J]. IEEE Transactions on Industry Applications, 2020, 56(2): 1784-1792.
[21] 张俊岭, 尹朋, 王继伟, 等. 无线电能传输中继线圈位置特性分析[J]. 电气传动, 2025, 55(2): 20-25.
Zhang Junling, Yin Peng, Wang Jiwei, et al. Analysis of the position characteristics of wireless power transmission with relay coils[J]. Electric Drive, 2025, 55(2): 20-25.
[22] Wang Zhiyuan, Cui Shumei, Song Beibei, et al. Comprehensive optimisation and comparison of multiphase receiver for dynamic wireless charging system[J]. IET Power Electronics, 2019, 12(10): 2475-2484.
[23] Yin Jialin, Mekhilef S, Darvish P, et al. A new cross-overlapped decoupling coil structure for EV dynamic inductive wireless charging system[J]. IEEE Transactions on Industrial Electronics, 2025, 72(2): 1314-1324.
[24] 苏玉刚, 邓晨琳, 胡宏晟, 等. 信号与能量极板层叠方式下的电场耦合式无线电能传输系统[J]. 中国电机工程学报, 2024, 44(19): 7762-7772.
Su Yugang, Deng Chenlin, Hu Hongsheng, et al. Electric-field coupled wireless power transfer system with signal plate and energy plate stacking mode[J]. Proceedings of the CSEE, 2024, 44(19): 7762-7772.
[25] Wang C S, Stielau O H, Covic G A. Design con- siderations for a contactless electric vehicle battery charger[J]. IEEE Transactions on Industrial Elec- tronics, 2005, 52(5): 1308-1314.
[26] Budhia M, Covic G, Boys J. Magnetic design of a three-phase inductive power transfer system for roadway powered electric vehicles[C]//2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 2010: 1-6.
[27] Elliott G A J, Raabe S, Covic G A, et al. Multiphase pickups for large lateral tolerance contactless power- transfer systems[J]. IEEE Transactions on Industrial Electronics, 2010, 57(5): 1590-1598.
[28] Elliott G A J, Covic G A, Kacprzak D, et al. A new concept: asymmetrical pick-ups for inductively coupled power transfer monorail systems[J]. IEEE Transactions on Magnetics, 2006, 42(10): 3389-3391.
[29] Raabe S, Covic G A. Practical design considerations for contactless power transfer quadrature pick-ups[J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 400-409.
[30] Budhia M, Boys J T, Covic G A, et al. Development of a single-sided flux magnetic coupler for electric vehicle IPT charging systems[J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 318-328.
[31] Nagendra G R, Covic G A, Boys J T. Sizing of inductive power pads for dynamic charging of EVs on IPT highways[J]. IEEE Transactions on Transportation Electrification, 2017, 3(2): 405-417.
[32] Zaheer A, Covic G A, Kacprzak D. A bipolar pad in a 10-kHz 300-W distributed IPT system for AGV applications[J]. IEEE Transactions on Industrial Electronics, 2013, 61(7): 3288-3301.
[33] Kim S, Covic G A, Boys J T. Tripolar pad for inductive power transfer systems for EV charging[J]. IEEE Transactions on Power Electronics, 2017, 32(7): 5045-5057.
[34] Qualcomm’s Dynamic Charging Tech Could Make Electric Vehicles Mainstream[EB/OL]. https://www. alphr.com/cars/1005950.
[35] Choi S Y, Gu B W, Jeong S Y, et al. Advances in wireless power transfer systems for roadway-powered electric vehicles[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(1): 18-36.
[36] WAVE Official Website of WAVE[EB/OL]. http:// www.waveipt.com/projects/54f3ed317d08dc1700e6a635.
[37] Zhang Shiyao, Yu J J Q. Electric vehicle dynamic wireless charging system: optimal placement and vehicle-to-grid scheduling[J]. IEEE Internet of Things Journal, 2021, 9(8): 6047-6057.
[38] 解决电动汽车续航焦虑: Stellantis集团开通无线充电测试公路,目前只有1公里[EB/OL]. https://www. ithome.com/0/590/947.htm.
[39] 王杰. 电动汽车动态无线充电功率波动性研究[D]. 天津: 天津工业大学, 2020.
Wang Jie. Study on power fluctuation of dynamic wireless charging for electric vehicles[D]. Tianjin: Tianjin Polytechnic University, 2020.
[40] 我所研发的60kW电动汽车移动式无线充电示范系统在南宁亮相[EB/OL]. http://www.wptchina.com. cn/ReadNews.asp?rid=2102.
[41] Cui Shumei, Wang Zhiyuan, Song Liwei. A novel magnetic coupling mechanism for dynamic wireless charging system for electric vehicles[C]//2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 2016: 1-5.
[42] 实时充电!“5G+自动驾驶”高功率动态无线充电道路系统亮相[EB/OL]. https://news.cctv.com/2023/ 07/18/ARTISeJTzFO5pvwsuh1I3PW0230718.shtml.
[43] Winter J, Mayer S, Kaimer S, et al. Inductive power supply for heavy rail vehicles[C]//2013 3rd Inter- national Electric Drives Production Conference (EDPC), Nuremberg, Germany, 2013: 1-9.
[44] Kim J H, Lee B S, Lee J H, et al. Development of 1-MW inductive power transfer system for a high- speed train[J]. IEEE Transactions on Industrial Electronics, 2015, 62(10): 6242-6250.
[45] Lee G, Kim M Y, Lee S G, et al. Operational verification of semidynamic wireless power transfer in light-rail transit systems[J]. IEEE Transactions on Transportation Electrification, 2025, 11(1): 348-358.
[46] 西南交通大学轨道交通无线供电技术在国内首台无线供电制式城轨车辆得到成功应用[EB/OL]. https://dqxy.swjtu.edu.cn/info/1294/20597.htm.
[47] 李京, 乐文韬, 肖磊, 等. 智轨电车无线充电系统研究与应用[J]. 技术与市场, 2023, 30(8): 19-24, 27.
Li Jing, Le Wentao, Xiao Lei, et al. Research and applicationon wireless charging system of ART[J]. Technology and Market, 2023, 30(8): 19-24, 27.
[48] Mahajan S M, Singareddy U M. A real-time con- ductor sag measurement system using a differential GPS[J]. IEEE Transactions on Power Delivery, 2012, 27(2): 475-480.
[49] 郭俊杰. 无人驾驶车GPS自主导航系统设计与实现[D]. 西安: 长安大学, 2014.
Guo Junjie. GPS navigation system design and implementation fordriverless smart vehicle[D]. Xi’an: Changan University, 2014.
[50] 张煦晗. 基于激光雷达与IMU融合的静态地图构建算法研究[D]. 长春: 吉林大学, 2024.
Zhang Xuhan. Research on static map construction algorithm based on the fusion of lidar and IMU[D]. Changchun: Jilin University, 2024.
[51] Scaramuzza D, Fraundorfer F. Visual odometry part I: the first 30 years and fundamentals[J]. IEEE Robotics and Automation Magazine, 2011, 18(4): 80-92.
[52] Tang Weiming, Li Yangyang, Deng Chenlong, et al. Stability analysis of position datum for real-time GPS/BDS/INS positioning in a platform system with multiple moving devices[J]. Remote Sensing, 2021, 13(23): 4764.
[53] Li Xiaoming, Tan Xinglong, Zhao Changsheng. PSO- LSSVR assisted GPS/INS positioning in occlusion region[J]. Sensors, 2019, 19(23): 5256.
[54] 周驰东. 磁导航自动导向小车(AGV)关键技术与应用研究[D]. 南京: 南京航空航天大学, 2012.
Zhou Chidong. Research on the key technologies of magnetic guided automated guided vehicleand[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012.
[55] 王金钗. 变电站巡检机器人磁导航系统设计与实现[D]. 成都: 西南交通大学, 2015.
Wang Jinchai. The design of magnetic navigation system for substation inspection robot[D]. Chengdu: Southwest Jiaotong University, 2015.
[56] Preradovic S, Karmakar N C. Chipless RFID: bar code of the future[J]. IEEE Microwave Magazine, 2010, 11(7): 87-97.
[57] Dardari D, D’Errico R, Roblin C, et al. Ultrawide bandwidth RFID: the next generation?[J]. Pro- ceedings of the IEEE, 2010, 98(9): 1570-1582.
[58] Zhu Bing, Tao Xiaowen, Zhao Jian, et al. Two-stage UWB positioning algorithm for intelligent vehicles[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 256-266.
[59] Zhang Xiaoguo, Wang Qing, Wan Dejun. The relation- ship among vehicle positioning performance, map quality, and sensitivities and feasibilities of map- matching algorithms[C]//IEEE IV2003 Intelligent Vehicles Symposium. Proceedings, Columbus, OH, USA, 2003: 468-473.
[60] Zhu Bing, Tao Xiaowen, Zhao Jian, et al. An inte- grated GNSS/UWB/DR/VMM positioning strategy for intelligent vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10842-10853.
[61] Zhu Zhiyu, Yang Yang, Chen Mingzhe, et al. Visible light positioning with visual odometry: a single luminaire based positioning algorithm[J]. IEEE Transactions on Communications, 2024, 72(8): 4978- 4991.
[62] 杨梦佳. 基于惯导与双目视觉融合的SLAM技术研究[D]. 西安: 西安科技大学, 2020.
Yang Mengjia. Research on SLAM technology based on fusion of inertial navigation and binocular vision[D]. Xi’an: Xi’an University of Science and Technology, 2020.
[63] 地图导航如何生成二维码?扫码直达[EB/OL]. https://blog.csdn.net/d_c1n/article/details/143566790.
[64] 王生亮. GNSS/UWB/DBA/移动蜂窝网络多源融合定位算法研究[D]. 武汉: 中国科学院大学(中国科学院精密测量科学与技术创新研究院), 2021.
Wang Shengliang. Research on GNSS/UWB/DBA/ mobile cellular network multi-source fusion posi- tioning algorithm[D]. Wuhan: Innovation Academy for Precision Measurement Science and Technology, Chinese Academy of Sciences, 2021.
[65] 杨麒弘. 基于蜂窝网络的定位技术研究[D]. 北京: 北京: 北京邮电大学, 2017.
Yang Qihong. Research on location technology based on cellular network[D]. Beijing: Beijing University of Posts and Telecommunications, 2017.
[66] Nagendra G R, Chen Liang, Covic G A, et al. Detection of EVs on IPT highways[J]. IEEE Journal of Emerging and Selected Topics in Power Elec- tronics, 2014, 2(3): 584-597.
[67] 徐勇. 电动汽车无线供电系统导轨切换的检测和控制[D]. 重庆: 重庆大学, 2016.
Xu Yong. The detection and control of coil switching for wireless EV power supply system[D]. Chongqing: Chongqing University, 2016.
[68] Patil D, Miller J M, Fahimi B, et al. A coil detection system for dynamic wireless charging of electric vehicle[J]. IEEE Transactions on Transportation Electrification, 2019, 5(4): 988-1003.
[69] Hwang K, Park J, Kim D, et al. Autonomous coil alignment system using fuzzy steering control for electric vehicles with dynamic wireless charging[J]. Mathematical Problems in Engineering, 2015(1): 205285.
[70] Hwang K, Cho J, Kim D, et al. An autonomous coil alignment system for the dynamic wireless charging of electric vehicles to minimize lateral misa- lignment[J]. Energies, 2017, 10(3): 315.
[71] Hwang K, Kim D, Har D, et al. Pickup coil counter for detecting the presence of trains operated by wireless power transfer[J]. IEEE Sensors Journal, 2017, 17(22): 7526-7532.
[72] Hwang K, Cho J, Park J, et al. Ferrite position identification system operating with wireless power transfer for intelligent train position detection[J]. IEEE Transactions on Intelligent Transportation Systems, 20(1): 374-382.
[73] Son S, Shin Y, Woo S, et al. Sensor coil system for misalignment detection and information transfer in dynamic wireless power transfer of electric vehicle[J]. Journal of Electromagnetic Engineering and Science, 2022, 22(3): 309-318.
[74] Azad A N, Echols A, Kulyukin V A, et al. Analysis, optimization, and demonstration of a vehicular detection system intended for dynamic wireless charging applications[J]. IEEE Transactions on Transportation Electrification, 2018, 5(1): 147-161.
[75] 杨金明, 邓梓颖, 陈渊睿, 等. 基于四线圈的动态无线输电的位置检测[J]. 广东电力, 2021, 34(4): 43-52.
Yang Jinming, Deng Ziying, Chen Yuanrui, et al. Position detection based on four coils applied in dynamic wireless power transmission[J]. Guangdong Electric Power, 2021, 34(4): 43-52.
[76] 方琪琦. 基于磁定位检测技术的电动汽车动态无线供电系统控制研究[D]. 北京: 北京交通大学, 2017.
Fang Qiqi. Research on control of dynamic wireless power transfer system for electric vehicle based on magnetic positioning technology[D]. Beijing: Beijing Jiaotong University, 2017.
[77] Tavakoli R, Shabanian T, Dede E M, et al. EV misalignment estimation in DWPT systems utilizing the roadside charging pads[J]. IEEE Transactions on Transportation Electrification, 2022, 8(1): 752-766.
[78] 王霆阳. 应用于分段式导轨的车辆位置检测与供电导轨切换技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
Wang Tingyang. Research on vehicle position detection and power supply rail switching tech- nology applied to segmented rail[D]. Harbin: Harbin Institute of Technology, 2020.
[79] Tian Yong, Zhu Ze, Xiang Lijuan, et al. Vision-based rapid power control for a dynamic wireless power transfer system of electric vehicles[J]. IEEE Access, 2020, 8: 78764-78778.
[80] Cheng Jun, Zhang Liyan, Chen Qihong, et al. Position detection for electric vehicle DWCS using VI-SLAM method[J]. Energy Reports, 2021, 7: 1-9.
[81] Lee K, Pantic Z, Lukic S M. Reflexive field containment in dynamic inductive power transfer systems[J]. IEEE Transactions on Power Electronics, 2013, 29(9): 4592-4602.
[82] Hasan N, Wang Hongjie, Saha T, et al. A novel position sensorless power transfer control of lumped coil-based in-motion wireless power transfer systems[C]//2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 2015: 586-593.
[83] Simonazzi M, Sandrolini L, Mariscotti A. Receiver- coil location detection in a dynamic wireless power transfer system for electric vehicle charging[J]. Sensors, 2022, 22(6): 2317.
[84] Kamineni A, Covic G A, Boys J T. Interoperable EV detection for dynamic wireless charging with existing hardware and free resonance[C]//2016 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Knoxville, TN, USA, 2016: 169-173.
[85] Hamada T, Shirasaki D, Fujita T, et al. Proposal of sensorless vehicle detection method for start-up current control in dynamic wireless power transfer system[C]//IECON 2021-47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 2021: 1-6. https://doi.org/10.1109/IE CON48115. 2021.9589667
[86] Deng Qijun, Liu Jiangtao, Czarkowski D, et al. Edge position detection of on-line charged vehicles with segmental wireless power supply[J]. IEEE Transa- ctions on Vehicular Technology, 2017, 66(5): 3610- 3621.
[87] Xiong Wei, Liu Jiangtao, Chen Jing, et al. Detection of secondary side position for segmented dynamic wireless charging systems based on primary phase angle sensing[J]. Electronics, 2023, 12(9): 2148.
[88] Behnamfar M, Stevenson A, Tariq M, et al. Vehicle position detection based on machine learning algorithms in dynamic wireless charging[J]. Sensors, 2024, 24(7): 2346.
[89] Wang Hongjie, Pratik U, Jovicic A, et al. Dynamic wireless charging of medium power and speed electric vehicles[J]. IEEE Transactions on Vehicular Tech- nology, 2021, 70(12): 12552-12566.
[90] Wang Junhua, Wan Leke, Cai Changsong, et al. A dual-side magnetic integration-based receiver dete- ction method of long-track DWPT system[J]. IEEE Transactions on Power Electronics, 2024, 39(6): 7752-7765.
Abstract Dynamic wireless power transfer technology provides a disruptive solution for the energy supply mode of electric vehicles. To improve the system's efficiency and safety, a segmented rail array arrangement and flexible switching based on vehicle position have become a necessary means. This paper summarizes the development status and vehicle positioning method of dynamic wireless power transfer technology for electric vehicles, reviews the application and innovation of position detection technology, and discusses the development process, current technical implementation, and key problems of position detection technology with auxiliary detection device and longitudinal position detection technology without auxiliary detection device. It is concluded that the position detection technology requires further improvement in detection accuracy, response speed, cost, and environmental adaptability. Future research directions are prospectively outlined to provide a reference for the research of position detection technology in dynamic wireless power supply systems.
Firstly, the positioning mode of the vehicle at this stage comprises global navigation satellite system (GNSS) positioning, inertial navigation system (INS) positioning, map matching positioning, wireless communication positioning, magnetic positioning, and visual positioning, generally with issues related to positioning accuracy and real-time performance. Directly applying it to the position detection of a dynamic wireless power transfer system is challenging, and various methods must be fused.
Secondly, the position detection technology of a dynamic wireless power transfer system can be divided into longitudinal/transverse position detection technology with auxiliary detection devices and longitudinal position detection technology without auxiliary detection devices. The technology of unassisted detection devices has cost and power consumption advantages, but its adaptability in complex environments is slightly lower than that of assisted device technology. The technology of auxiliary detection devices offers high accuracy and reliability, making it suitable for various complex environments. However, it often requires a certain amount of space and increases system costs.
Lastly, the maturity and application of position detection technology in dynamic wireless power transfer systems must solve the problems of detection accuracy, response speed, cost, and environmental adaptability. These can be considered in studying lateral position detection technology, which does not require auxiliary detection devices, offers full integration with vehicle positioning systems, and leverages a combination of big data and intelligent algorithms.
keywords:Electric vehicles, dynamic wireless power transfer, segmented transmitters, position detection
DOI: 10.19595/j.cnki.1000-6753.tces.242165
中图分类号:TM724
国家自然科学基金面上项目(52177003)和黑龙江省博士后面上基金项目(LBH-Z23141)资助。
收稿日期 2024-12-01
改稿日期 2025-01-14
高 鑫 男,1994年生,助理教授,研究方向为电动汽车无线电能传输技术。E-mail: gaoxin@hit.edu.cn(通信作者)
司哲伦 男,2000年生,硕士研究生,研究方向为动态无线供电位置检测技术。E-mail: ZhelunSi@163.com
(编辑 郭丽军)