 为输入电压,
为输入电压, 为扼流电感,S为MOSFE,
为扼流电感,S为MOSFE, 为并联电容,
为并联电容, 为原边谐振电容,
为原边谐振电容, 为原边谐振电感,
为原边谐振电感, 为副边谐振电容,
为副边谐振电容, 为副边谐振电感,
为副边谐振电感, 与
与 为原边与副边等效电阻,
为原边与副边等效电阻, ~
~ 为4个整流二极管,
为4个整流二极管, 为输出电容。为确定系统软开关起动方式,首先分析直流电压、电流与电磁转矩之间的关系。由电压平衡首先得知
为输出电容。为确定系统软开关起动方式,首先分析直流电压、电流与电磁转矩之间的关系。由电压平衡首先得知摘要 机器人技术的快速发展推动了机器人的广泛应用,但传统有线供电方式布线复杂、易损坏,且限制其运动灵活性,难以满足日益丰富的场景需求。因而,无线供电技术成为理想解决方案。针对基于E类逆变器的无线电能传输系统在机器人直流电机起动过程中因负载动态变化导致持续硬开关问题,该文提出一种副边电容动态匹配以实现电机起动过程中全时域开关零电压导通(ZVS)方法。首先,在对直流电机起动到稳态运行全时域等效负载变化特性展开研究的基础上,探究副边电容动态调整下的等效负载特性。其次,分析并获取E类逆变器软开关工作状态下的负载变化区间。再次,提出相应的动态匹配策略,以确保系统在起动过程中全时段维持软开关状态。最后,搭建一台功率为50 W的实验样机,在所提策略下,系统从起动瞬间到稳定运行保持全过程软开关,验证了所提方法的有效性。
关键词:无线供电 E类逆变器 动态电容匹配 机器人直流电机 软开关
机器人技术的发展推动了其在工业自动化、智能家居及一些特殊领域的广泛应用。而直流电机因其良好的控制性能和高能量转换效率,成为机器人机电系统中常用的动力驱动器件。目前,机器人广泛应用于家庭与医疗等日常生活领域中,如医疗机器人、焊接机械臂、喷涂机械臂等。应用场景的多样化要求机器人手臂关节具备高度灵活性和紧凑性。在空间受限或运动范围要求较高的情况下,传统的有线电力传输方案往往无法满足这些要求[1-3]。而无线供电技术由于其非接触的供能方式,有效地解决了机器人机械臂线缆布线复杂及易损坏等问题,因此成为潜在的替代方案[4-5]。
在机器人直流电机无线供电系统中,提高系统频率可以有效减小无源器件的体积,从而进一步提高系统的功率密度,特别适合空间受限的机器人手臂关机应用。由此基于E类逆变器的磁耦合谐振式无线电能传输系统因其高频高效的逆变特性,成为机器人关节电机无线供电系统的较理想选择[6-8]。常见的逆变器拓扑包括全桥拓扑、半桥拓扑和Class E拓扑。Class E拓扑相较于半桥和全桥拓扑在高频应用中具有显著优势。首先,半桥和全桥拓扑在高频操作时可能出现死区,导致开关管切换时发生短时间的过渡状态,增加了开关损耗,而Class E拓扑由于仅使用单个MOSFET,避免了死区问题。其次,Class E拓扑在高频下的适应性更强,开关损耗较小,同时提高系统频率能够有效减小无源器件的体积,从而提升系统的功率密度,特别适用于机器人手臂关节等狭小空间的应用。最后,Class E拓扑更容易实现软开关,减少开关损耗,相较于传统的半桥和全桥拓扑,能够在高频条件下实现更高的系统效率[9-10]。然而,在实际应用中,如直流电机驱动系统中,电机等效负载突变常导致E类逆变器长时间工作在硬开关状态。这不仅显著增加了开关损耗,降低了系统效率,还容易导致系统开关管因过热而损坏,影响了系统的可靠性[11-14]。
针对上述问题,部分学者展开了研究。文献[15-17]提出一种基于全桥逆变器的直流电机无线供电系统,该方案控制复杂、成本较高,且难以工作在高频状态。文献[18]提出一种基于E类逆变器的直流电机无线供电系统,但未考虑到直流电机起动及变速时因等效负载变化而产生的系统硬开关问题。文献[19]提出一种具有双路E类逆变器功率合成输出的系统拓扑,利用耦合电感降低逆变器有载品质因数,增强E类逆变器的谐振参数容差能力。文献[20-21]提出一种相位控制法,通过对E类逆变器输出电压和输出电流相位差进行跟踪,调整驱动信号占空比及频率,实现零电压开通(Zero Voltage Switching, ZVS),但该方法造成逆变器输出频率发生变化,不适合应用于直流电机的无线电能传输系统。文献[22]通过并联可调饱和电抗器降低负载变化对开关状态的影响,但是在强耦合条件下对系统效率及输出功率提升有限。
针对上述问题,本文提出一种通过动态地调整副边电容来实现全时域软开关的方法。首先,对直流电机从起动到稳态运行的等效负载变化特性进行了深入研究,探讨了副边电容动态匹配对等效负载的影响。在分析并确定了E类逆变器在软开关条件下的负载变化范围的基础上,制定了相应的动态匹配策略,确保系统在整个起动过程中都能维持软开关状态。最后,通过搭建一台功率为50 W的实验样机验证了所提方法的有效性。
直流电机等效电路如图1所示。图1中,为输入电压,为扼流电感,S为MOSFE,为并联电容,为原边谐振电容,为原边谐振电感,为副边谐振电容,为副边谐振电感,与为原边与副边等效电阻,~为4个整流二极管,为输出电容。为确定系统软开关起动方式,首先分析直流电压、电流与电磁转矩之间的关系。由电压平衡首先得知
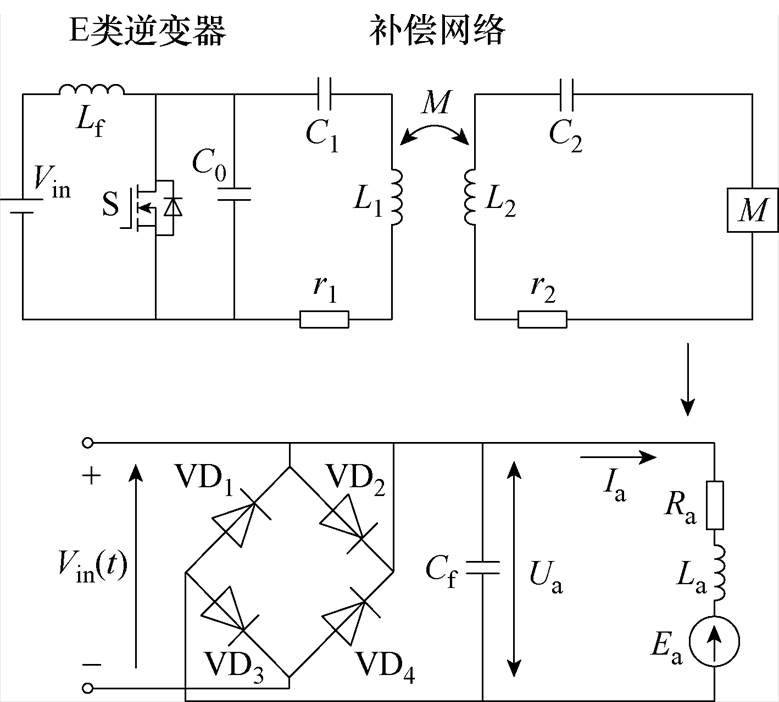
图1 直流电机等效电路
Fig.1 Equivalent circuit of the DC motor
 (1)
(1)
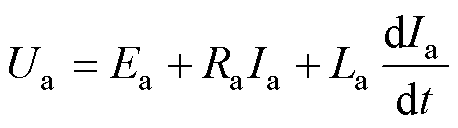
式中, 为电枢绕组上的电压;
为电枢绕组上的电压; 为通过电枢绕组的电流;
为通过电枢绕组的电流; 为电枢绕组的电阻;
为电枢绕组的电阻; 为电枢绕组的电感;
为电枢绕组的电感; 为反电动势。
为反电动势。
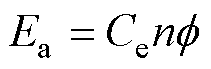
反电动势为
 (2)
(2)
式中,Ce为电动势常数; 为电机转速;
为电机转速; 为定子磁通。在起动瞬间,电机处于静止状态,电机的转速由于惯性不能突变,则反电动势Ea=0。
为定子磁通。在起动瞬间,电机处于静止状态,电机的转速由于惯性不能突变,则反电动势Ea=0。
结合式(1)与式(2)对微分方程进行求解可得
 (3)
(3)
在起动瞬间,电流瞬间达到 ,由于电枢绕组较小,所以瞬间起动电流较大,随着转速的增加,反电动势增大,电流减小,最终稳定在
,由于电枢绕组较小,所以瞬间起动电流较大,随着转速的增加,反电动势增大,电流减小,最终稳定在 。瞬间起动电流可达到稳定电流的7~10倍。直接起动会导致电流较高,损坏无线供电系统。
。瞬间起动电流可达到稳定电流的7~10倍。直接起动会导致电流较高,损坏无线供电系统。
直流电机起动过程中的等效阻抗由小变大。这是因为在起动时,电机的反电动势尚未显著增加,导致电流较大,等效阻抗较小;而在加速过程中,反电动势的增加使电流减小,从而导致等效阻抗增大。
为了使直流电机克服负载转矩顺利起动,起动转矩应大于负载转矩。直流电机电磁转矩为
 (4)
(4)
式中, 为空载转矩;
为空载转矩; 为负载转矩;
为负载转矩; 为转子和负载的等效转动惯量;
为转子和负载的等效转动惯量; 为机械角速度。
为机械角速度。
以上内容探讨了直流电机起动过程中反电动势的动态建立特性与电枢绕组电流变化对机电端口等效阻抗特性的变化机理。下文将进一步研究引入全桥整流器后对电机等效阻抗特性的重构机制。
假设输入交流电压为
 (5)
(5)
式中, 为电压幅值。全桥整流器输出电压为输入电压的绝对值,即
为电压幅值。全桥整流器输出电压为输入电压的绝对值,即
 (6)
(6)
假设 为整流后电压的平均值,即
为整流后电压的平均值,即
 (7)
(7)
经过计算整理得
 (8)
(8)
设Rx为整流后电枢等效电阻,则利用输出电压平均值计算的负载功率PDC,此时有
 (9)
(9)
若直接用有效值计算功率 ,表示为
,表示为
 (10)
(10)
在理想状态下,不考虑整流桥损耗,则
 (11)
(11)
 (12)
(12)
 (13)
(13)
如图2所示为直流电机起动瞬间到电机稳定运行过程中电流、等效电阻的变化示意图。图2中, 为系统稳定运行时的额定电压,为电枢电流。
为系统稳定运行时的额定电压,为电枢电流。
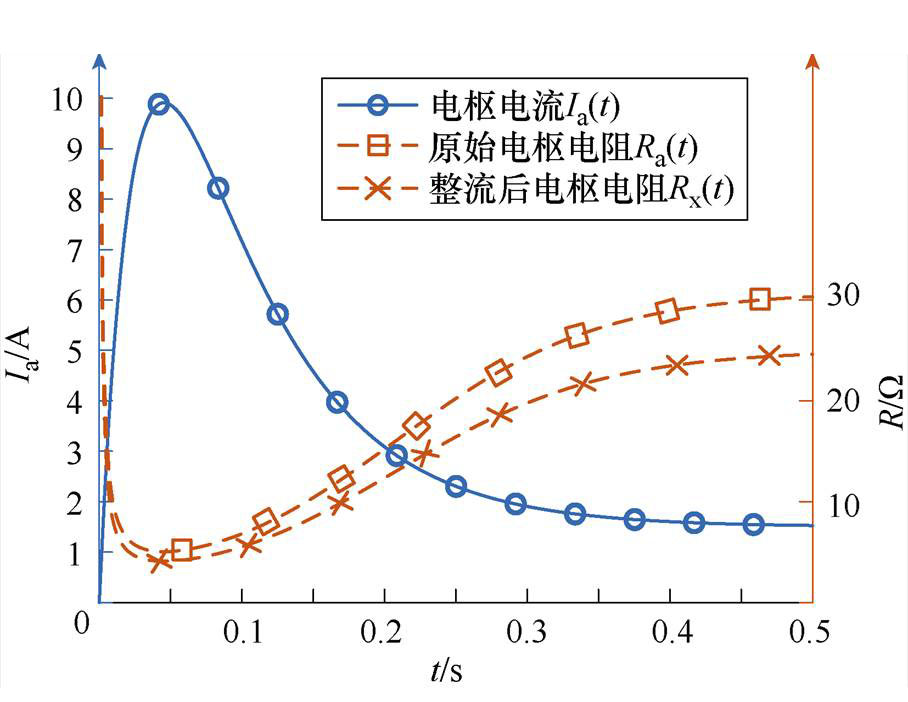
图2 直流电机起动电流与电阻变化示意图
Fig.2 Schematic diagram of DC motor startup current and resistance variation
1.1小节分析直流电机起动过程中电枢电流的变化趋势、直流电机等效电阻的变化趋势、全桥整流器对电阻的压缩特性。本小节进一步对图3所示的串联-串联(Series-Series, SS)补偿网络拓扑系统等效负载特性进行研究,分析在不同耦合强度下副边阻抗与原边等效阻抗关系。
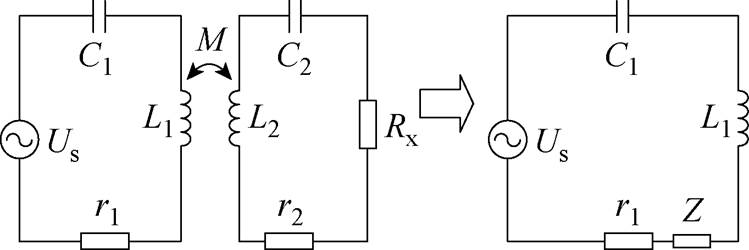
图3 基于SS拓扑系统的等效电路
Fig.3 Equivalent circuit of the system based on SS topology
当系统稳定运行时,在高频电源角频率 条件下,可以计算得反射阻抗Z为
条件下,可以计算得反射阻抗Z为
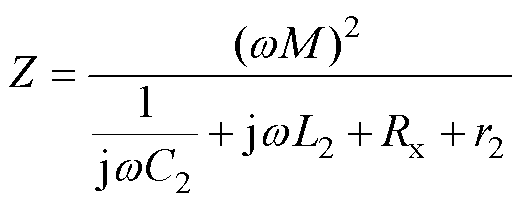 (14)
(14)
式中,M为原副边线圈间互感系数;k为耦合系数。 k与M的关系为
 (15)
(15)
则发射线圈等效输入阻抗Zin为
 (16)
(16)
结合式(16),可得等效输入阻抗与耦合系数k的关系为
 (17)
(17)
当原边线圈与副边线圈都处于完全补偿状态时,可得
 (18)
(18)
此时输入电阻为
 (19)
(19)
图4为原边等效阻抗与副边电阻的关系。随着副边电阻的增大,原边等效电阻减小。k值越大,变化越明显。
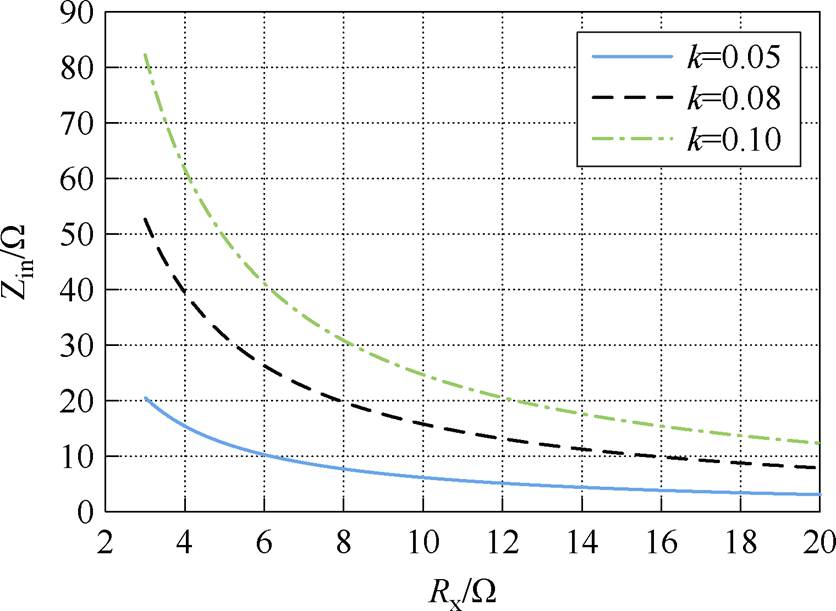
图4 原边阻抗Zin与副边电阻Rx关系
Fig.4 The relationship between Zin and Rx
当线圈强为耦合时,无补偿电容,等效输入阻抗为
 (20)
(20)
图5显示了输入阻抗Zin的实部和虚部随负载电阻Rx的变化情况,针对耦合系数k为0.05、0.08和0.1时。随着Rx的增加,实部Re(Zin)通常呈现上升上的趋势,其中较高的耦合系数(k=0.1)导致实部增加得更为显著,并在高Rx值时趋于平稳。虚部Im(Zin)随Rx增加而减小,且减小的幅度在较高耦合系数下更为明显,最终趋于稳定在较小的负值。整体上,高耦合系数使得实部增长更快,同时虚部的负值变化更为显著,这些趋势在不同的负载电阻范围内表现出明显的差异。当副边采用零补偿电容时,整体负载特性呈阻容性。
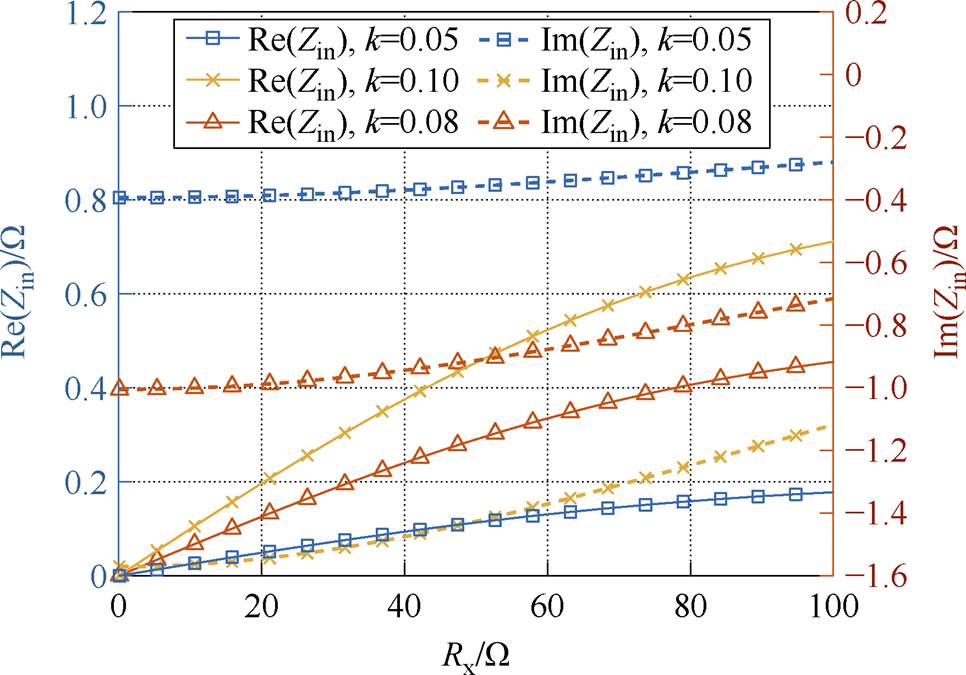
图5 零补偿后不同k值下Zin与Rx关系
Fig.5 The relationship between Zin and Rx under different k values after zero compensation
本小节进一步分析负载特性对软开关的影响。在一个工作周期T内,电路工作于两种谐振状态:开关管导通占空比约为50%,在 内,开关管导通,此时串联谐振电路由C1、L1与R0组成,电路中串联谐振角频率
内,开关管导通,此时串联谐振电路由C1、L1与R0组成,电路中串联谐振角频率 ;同样地,在
;同样地,在 内,开关管断开,谐振电路由C0、C1、L1与R0构成,此时工作电路中谐振角频率
内,开关管断开,谐振电路由C0、C1、L1与R0构成,此时工作电路中谐振角频率
 ,推导得到输出电流io、输入电流
,推导得到输出电流io、输入电流 ,开关管漏源极电压vs推导分别为
,开关管漏源极电压vs推导分别为
 (21)
(21)
 (22)
(22)
式中, 、
、 、
、 、
、 、
、 、a、b、l、
、a、b、l、 、
、 、
、 、
、 、
、 、
、 、
、 、
、 、e、g、Q见附录公式。
、e、g、Q见附录公式。
在内,开关管导通,电容C0短路,忽略其导通压降,此时开关管两端电压为0;在内,开关管关断,因电容C0与开关管并联,电容C0两端电压与开关管两端电压相同。两段工作时间内,参与谐振器件不同,通过精确计算可得输出电压电流为近似正弦的分段函数。
在基于E类逆变器的无线电能传输系统中,由于耦合强度以及负载变化,常会导致E类逆变器工作在硬开关状态。而负载变化原理较复杂,图6与图7为基于对E类逆变器开关管电压波形分析的基础上,采用控制变量,分别分析负载中单独电容、电阻变化过程中,开关管电压波形的变化规律,论证开关切换引起的负载特性变化能够满足开关管电压软开关的需求。
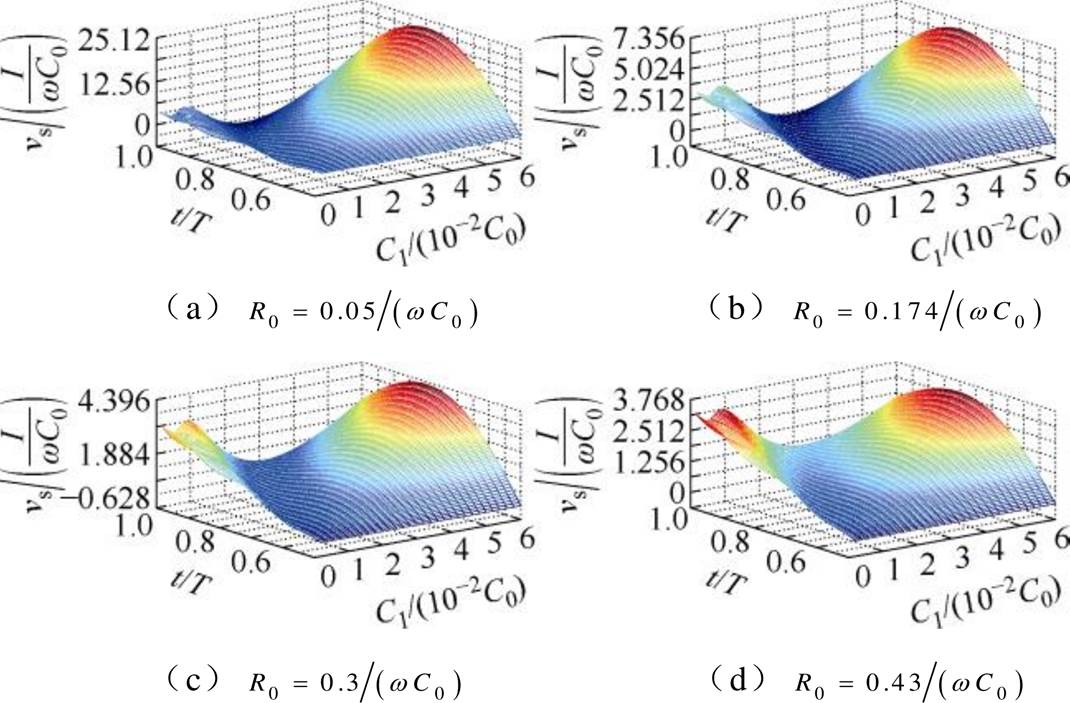
图6 不同电阻R0时,vs波形随C1变化关系
Fig.6 The relationship between vs waveforms and C1 variation at different resistances R0
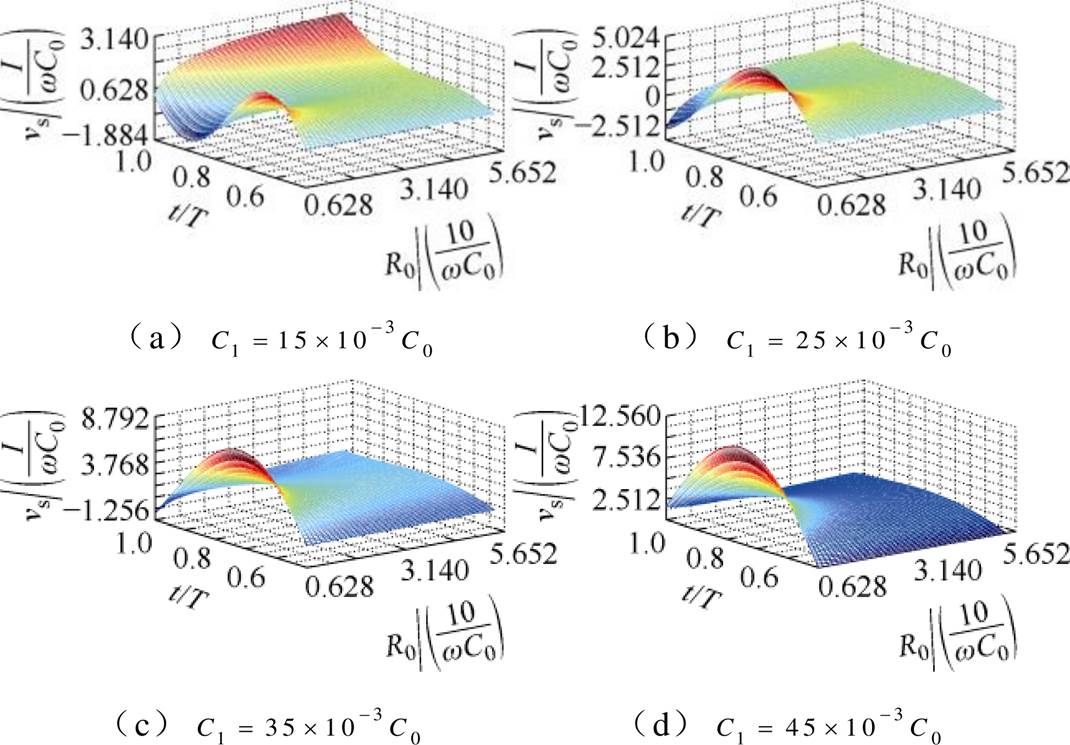
图7 不同电容C1时,vs波形随R0变化关系
Fig.7 The relationship between the waveforms of vs and R0 at different capacitor C1
根据式(21)可得,在时间内输出电压随原边等效负载网络内C1及负载R0的变化而变化,同样地,等效输入电流源取值与开关管关断时刻漏源极电压波形无关,仅会影响其波形幅值。同时,在分析中将开关管并联电容C0及等效输入电流源看为定值,分析结果如图6、图7所示。图6所示为电压vs在电阻R0分别为 、
、 、
、 及
及 时电压波形同谐振电容C1关系。在R0取值及,C1取值为0~
时电压波形同谐振电容C1关系。在R0取值及,C1取值为0~ 时存在T时刻开关管漏源极电压小于或等于0。在此取值范围内可以实现T时刻ZVS。而在R0取及时,在C1的有效取值范围内,vs始终为正,在此取值范围内无法实现周期内ZVS。
时存在T时刻开关管漏源极电压小于或等于0。在此取值范围内可以实现T时刻ZVS。而在R0取及时,在C1的有效取值范围内,vs始终为正,在此取值范围内无法实现周期内ZVS。
图7所示为C1取值分别为 C0、
C0、 C0、
C0、 C0及
C0及 C0时,开关管电压波形。由图7可知,在C1固定条件下,负载R0增大将延长电容C0充放电时间,导致开关管电压在T时刻也逐渐上升。当R0等于最优值时,开关管电压在T时刻为0,此时电路中无开关损耗且开关管发热情况不严重,工作效率最高。随着负载电阻R0逐渐增大,开关管电压在T时刻大于0,此时为硬开关状态。
C0时,开关管电压波形。由图7可知,在C1固定条件下,负载R0增大将延长电容C0充放电时间,导致开关管电压在T时刻也逐渐上升。当R0等于最优值时,开关管电压在T时刻为0,此时电路中无开关损耗且开关管发热情况不严重,工作效率最高。随着负载电阻R0逐渐增大,开关管电压在T时刻大于0,此时为硬开关状态。
副边补偿电容投切控制框图如图8所示。首先根据直流电机稳定运行的等效电阻设计E类逆变器的参数。由2.1节内容分析,直流电机在起动到稳定运行的过程中,等效电阻由大变小到稳定,E类逆变器由硬开关状态变为软开关状态。所以在起动瞬间,MCU通过采样电路获取电压电流数据,进而计算等效阻抗,当 时,无线电能传输系统处于硬开关状态,此时开关闭合,采用副边零补偿电容;当
时,无线电能传输系统处于硬开关状态,此时开关闭合,采用副边零补偿电容;当
 时,无线电能传输系统处于软开关状态,此时开关管断开,副边处于正常电容补偿状态。系统控制框图如图9所示。
时,无线电能传输系统处于软开关状态,此时开关管断开,副边处于正常电容补偿状态。系统控制框图如图9所示。
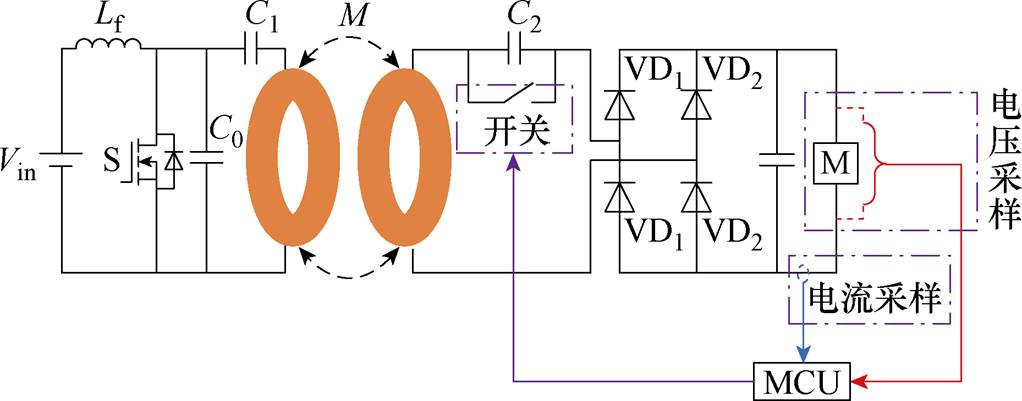
图8 副边补偿电容投切控制框图
Fig.8 The control block diagram for switching the secondary compensation capacitor
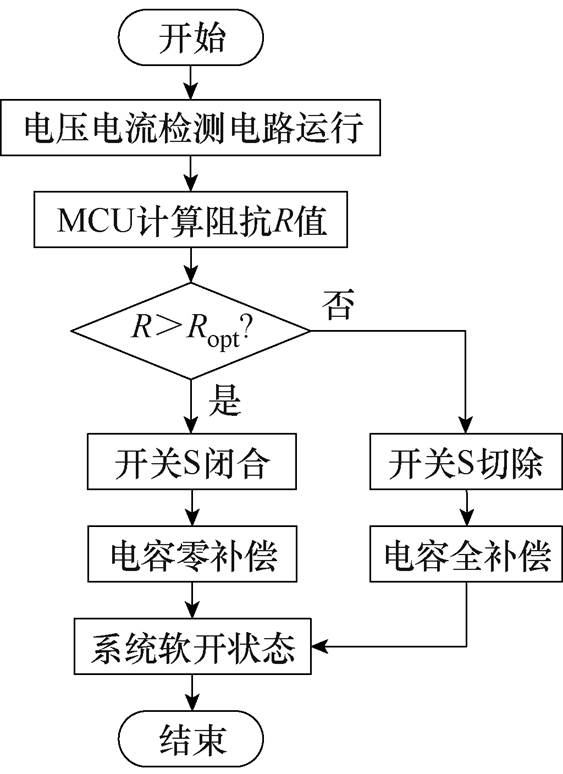
图9 系统控制流程
Fig.9 System control flowchart
由上述分析可知,直流电机在起动过程中,折射到原边的等效电阻由大到小变化,这导致E类逆变器由硬开关变化到软开关,如图10a所示。当副边进行零补偿后,折算到原边的阻抗特性发生改变,等效到原边的阻值变小。由于反续流二极管的作用,开关管将处于软开关状态。
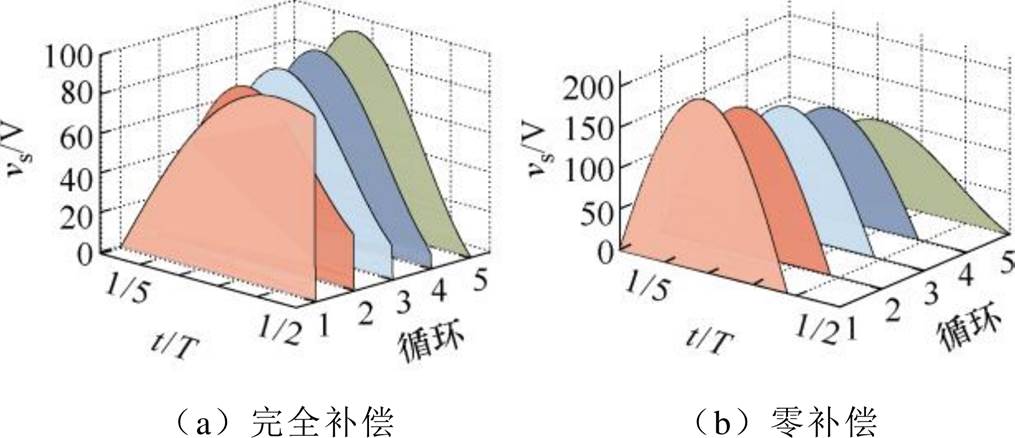
图10 直流电机起动过程中ZVS电压对比
Fig.10 Comparison of ZVS voltage during the startup process of a DC motor
基于上述理论分析,根据直流电机稳定运行时额定负载R0设计E类逆变器参数,使稳定运行时E类逆变器工作在最佳软开状态。假设给定其直流电源电压为40 V,额定开关频率f=500 kHz。实验原副边距离3 cm,耦合系数为0.306,忽略原副边线路阻抗,原边、副边电感值为50 mH。
 (23)
(23)
 (24)
(24)
 (25)
(25)
 (26)
(26)
 (27)
(27)
 (28)
(28)
为验证所提理论分析的可行性,基于图8所示的电路结构,搭建了完整的无线供电系统仿真模型。具体系统仿真参数见表1。
表1 仿真参数
Tab.1 Experimental prototype
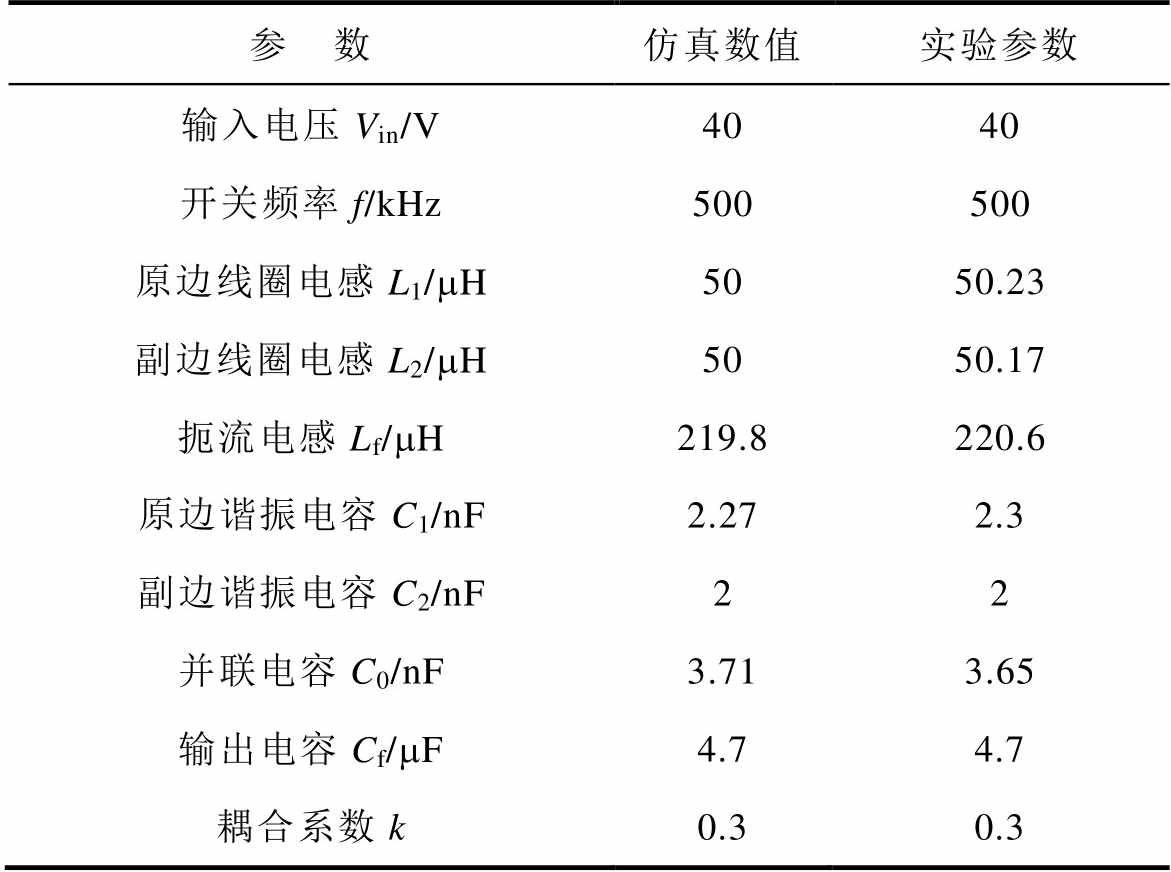
参 数仿真数值实验参数 输入电压Vin/V4040 开关频率f/kHz500500 原边线圈电感L1/mH5050.23 副边线圈电感L2/mH5050.17 扼流电感Lf/mH219.8220.6 原边谐振电容C1/nF2.272.3 副边谐振电容C2/nF22 并联电容C0/nF3.713.65 输出电容Cf/mF4.74.7 耦合系数k0.30.3
图11为副边电容正常补偿时,系统起动过程的仿真波形。从图11可以看出,由于系统起动时,等效负载较大,所以系统处于硬开关工作状态,但其硬开关程度随着直流电机起动而逐渐降低,且在1.4 ms后,系统才进入软开关状态并保持稳定。图12为副边电容零补偿策略时,系统起动过程的仿真波形。从图12可以看出,在零补偿策略下,E类逆变器在整个起动过程都处于软开关状态。当系统在0.52 ms进行开关投切时,其响应时间约为25 ms,但系统很快进入稳定状态并一直持续保持软开关状态,且副边电容零补偿策略所需的起动时间只需副边电容正常补偿起动时间的1/3左右。
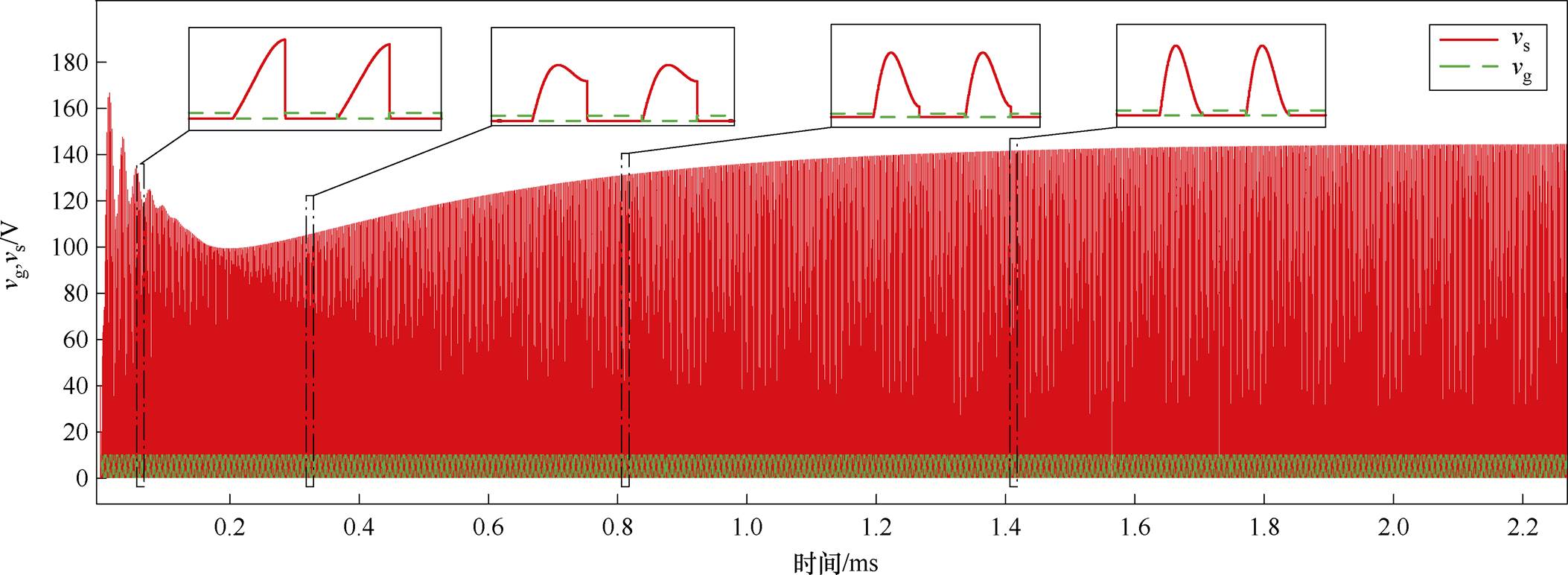
图11 正常补偿系统起动过程MOSFET管电压波形
Fig.11 Voltage waveforms of the MOSFET during the startup process of the normal compensation system
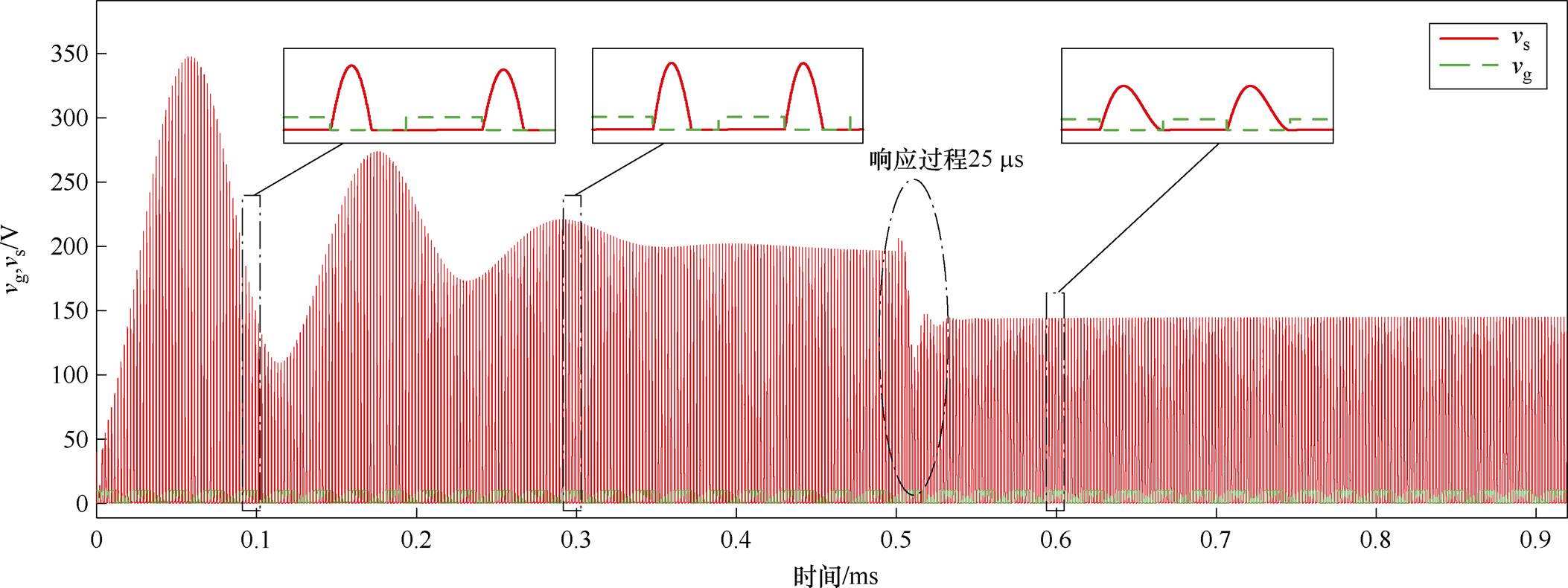
图12 零补偿系统起动过程MOSFET管电压波形
Fig.12 Voltage waveforms of the MOSFET during the startup process of the zero compensation system
为了充分验证本文所提方法的可行性,搭建实验样机,如图13所示。图13中,①为E类逆变器,其中MOS管型号为IRF740;②为耦合线圈L1和L2,耦合线圈采用 0.1 mm×200股利兹线绕制,其中发射线圈和接收线圈均采用圆筒形线圈绕制,绕制11匝;③为直流电机,型号WS-63ZYT08-R;④为主控电路DSP28335;⑤为上位机;⑥为示波器DLM2024;⑦为信号发生器AFG-2225;⑧为直流电源PSW-80-40.5;⑨为辅助电源GPD-2303S,用于驱动供电。实验参数见表1。
0.1 mm×200股利兹线绕制,其中发射线圈和接收线圈均采用圆筒形线圈绕制,绕制11匝;③为直流电机,型号WS-63ZYT08-R;④为主控电路DSP28335;⑤为上位机;⑥为示波器DLM2024;⑦为信号发生器AFG-2225;⑧为直流电源PSW-80-40.5;⑨为辅助电源GPD-2303S,用于驱动供电。实验参数见表1。
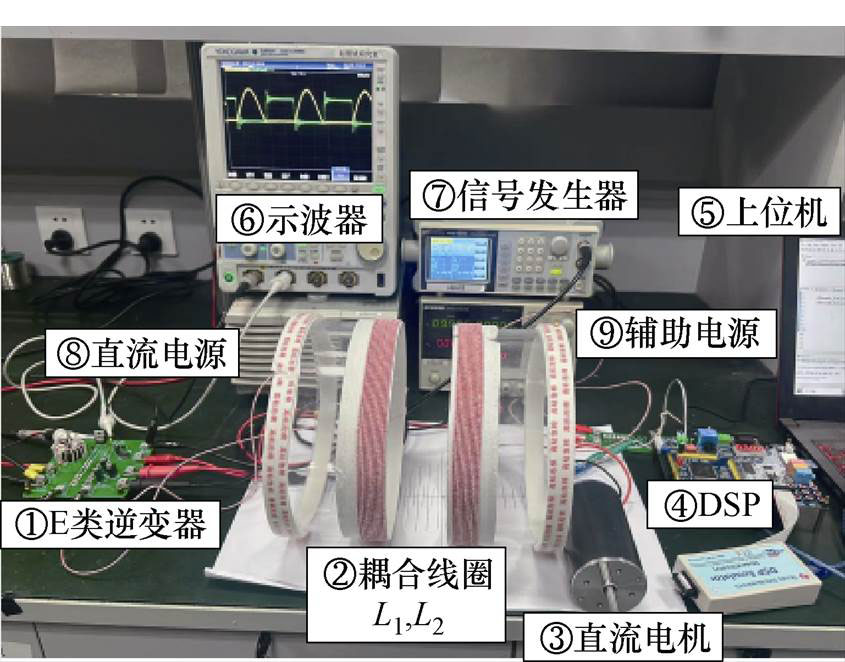
图13 实验样机
Fig.13 Experimental prototype
实验过程中测得两线圈耦合系数k与线圈距离h之间的关系如图14所示。
图15为基于E类逆变器的直流电机无线供电系统起动瞬间开关管电压波形。在起动T1时刻,由于系统等效电阻较大,无线供电系统处于硬开关状态。此时系统损耗较大,方波受硬开关状态发生振荡。在T2时刻,由于系统等效电阻变小,此时系统仍未稳定运行,无线供电系统仍工作在硬开关状态。在T3时刻,直流电机稳定运行,此时无线供电系统工作在最佳软开关状态。从整体趋势可知,系统起动瞬间有硬开关状态向最佳软开关状态过渡。
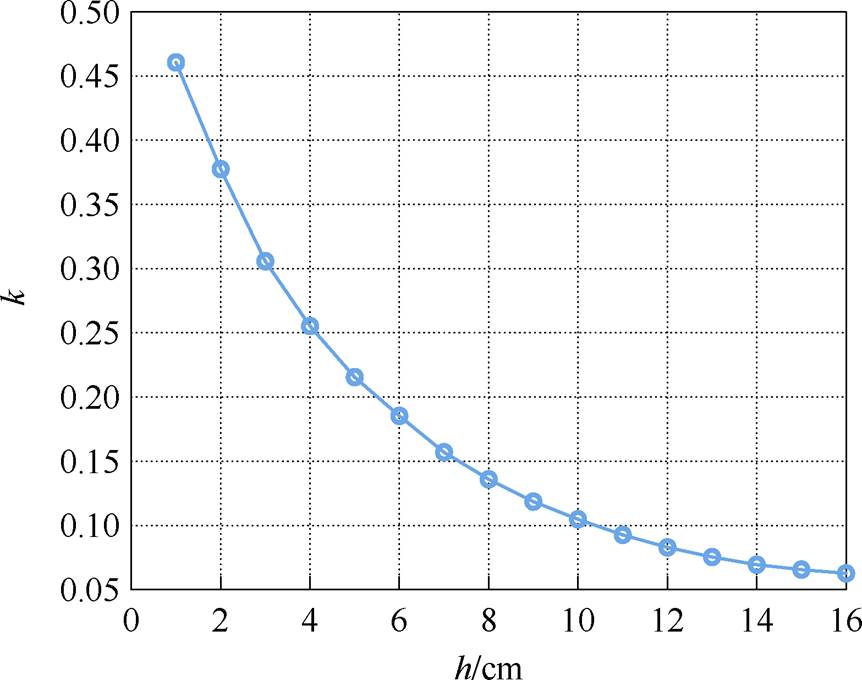
图14 耦合系数k与线圈距离h关系
Fig.14 Relationship between coupling coefficient k and coil distance h
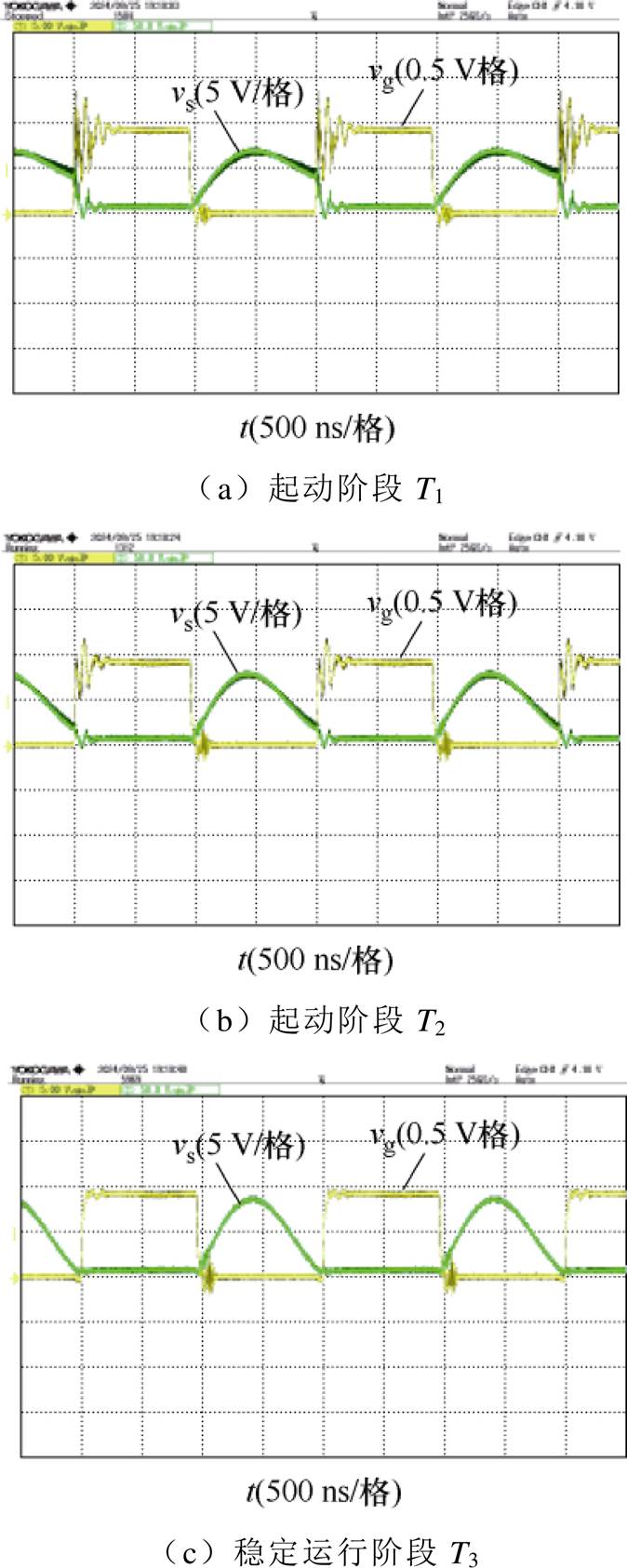
图15 常规起动过程ZVS变化
Fig.15 ZVS variation during conventional startup process
图16为副边线圈动态补偿状态下系统起动瞬间开关管电压波形。如图16a所示,由于副边补偿电容的调整,在T1时刻系统呈阻容性,此时等效电阻小,开关管电压会提前过零点。在T2阶段由于负载特性影响,原边的串联电感会等效减小,所以开关管电压波形过零点会稍微向右移动。此时T1与T2阶段都处于零电压关断状态。T3阶段,系统处于稳定运行状态,系统工作在标称ZVS下。
在系统起动过程中,MOSFET管工作在ZVS状态下,此时系统温度为28.30℃。随着系统逐渐进入稳定工作状态,温度缓慢上升并稳定在41.74℃。MOSFET热成像如图17所示,这一过程的温度变化表明,在保持ZVS状态的情况下,器件的温度升高较为平稳,开关损耗较低。这一结果进一步验证了ZVS状态在无线电能传输系统中能够有效降低器件损耗,提升系统效率,并延长器件的使用寿命。
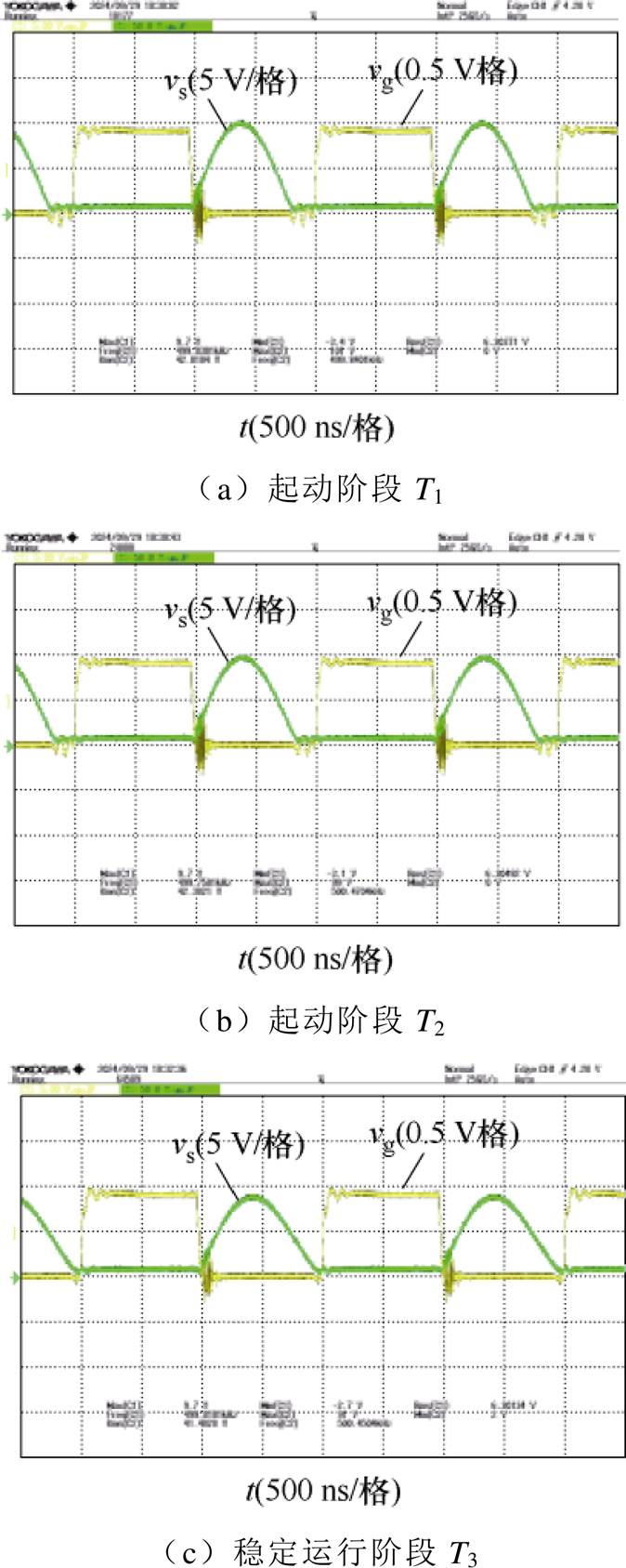
图16 动态补偿投切起动过程ZVS变化
Fig.16 ZVS variation during zero compensation switching startup process
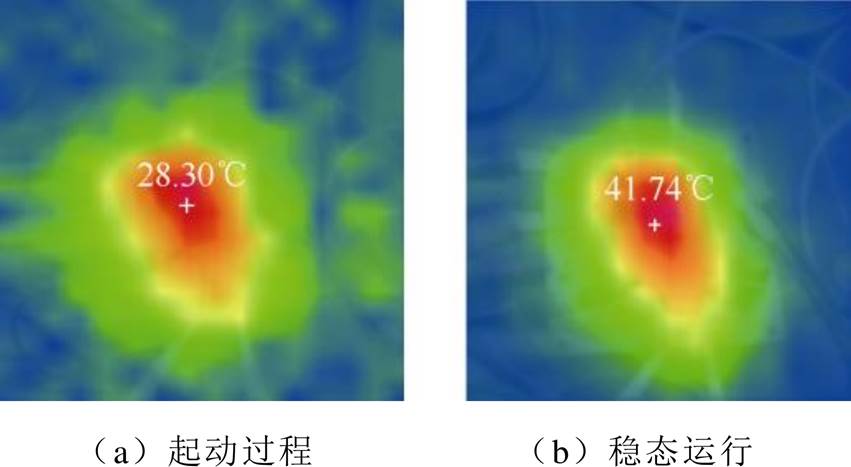
图17 MOSFET热成像
Fig.17 MOSFET temperature
本文搭建输入功率为50 W的实验平台,其中输入电压为40 V,输入电流为1.25 A。输出电压为24 V,输出电流1.81 A,输出功率约为43.44 W,其效率为86.9%。损耗为6.56 W。本文系统中损耗分布如图18所示,其中线圈损耗、扼流电感损耗采用实验测量电流有效值的二次方乘以线圈、电感的内阻得到,通态损耗为实验测量的开关管电流有效值二次方乘以开关管通态电阻得到。由图18可知,系统中线圈损耗最大,其次为扼流电感损耗。这是因为大功率或不同负载情况下,系统需要较大电感值的线圈与扼流电感,从而增大了电感内阻,导致系统损耗上升。
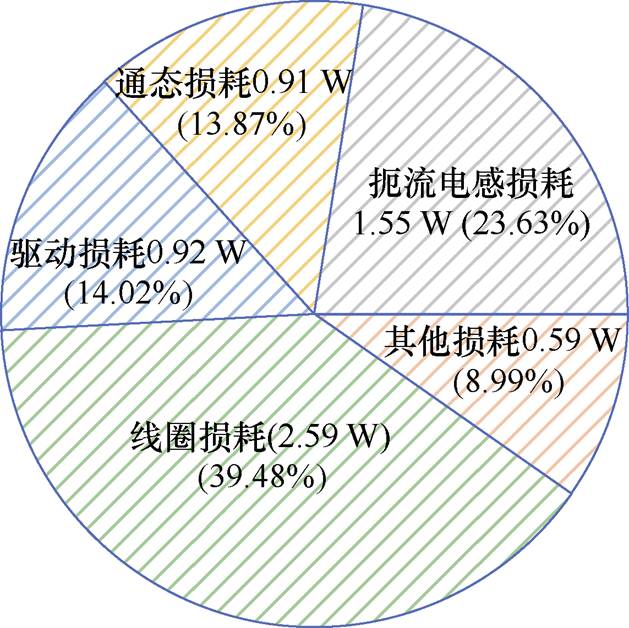
图18 损耗分布
Fig.18 Loss distribution
将所提方案与现有方案进行对比见表2。由表2可知,在应用于机器人手臂关节的直流电机无线供电方案中,本文采用E类逆变器,可在不增加耦合电感、额外电路、复杂控制的情况下,实现起动过程中系统的全时域软开关。此外,提高系统在ZVS状态下的频率,从而减小扼流电感与线圈的体积,进而降低损耗,提高效率。本方案不仅降低了系统复杂性,提高系统功率密度,还提高了系统稳定性。
表2 方案比较
Tab.2 Comparison of schemes
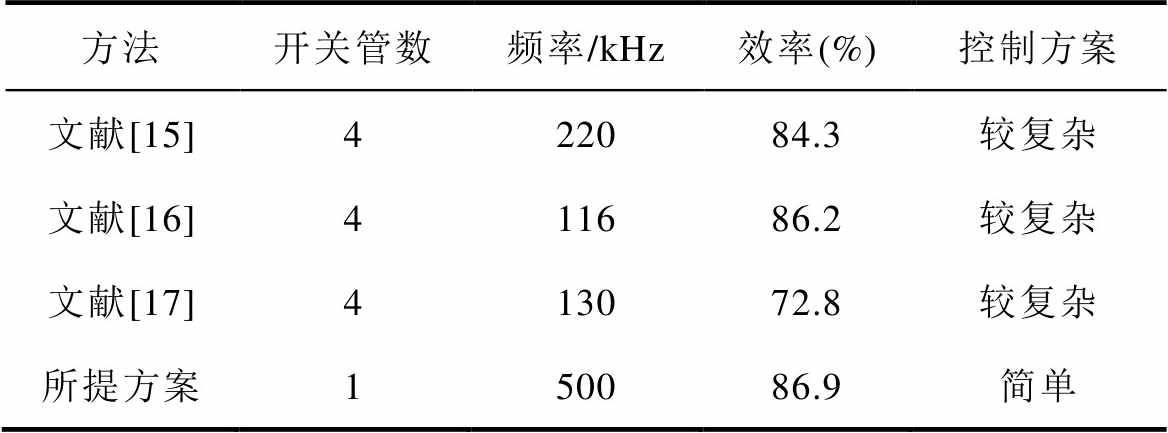
方法开关管数频率/kHz效率(%)控制方案 文献[15]422084.3较复杂 文献[16]411686.2较复杂 文献[17]413072.8较复杂 所提方案150086.9简单
针对机器人直流驱动电机无线供电系统(基于E类逆变器)起动过程中等效负载变化引起的硬开关问题,本文提出一种副边电容动态匹配以实现直流电机起动过程中全时域软开关目标,并得到以下结论。
1)在直流电机起动过程中,电机电流呈现出由瞬时突增至逐渐降低并最终稳定的特点,对应的等效电阻则由较小逐步增大;此过程中,原边反射阻抗表现为由较大逐步减小。当等效阻抗较大时,反射阻抗超过最优设计值,E类逆变器难以维持零电压导通(ZVS)状态。随着反射阻抗进一步增大,硬开关效应越明显。
2)本文提出了一种准静态副边电容动态匹配方法,通过在直流电机起动过程中切除副边补偿电容,而在额定运行条件下采用副边全补偿,实现了E类逆变器在不同工况下等效负载网络参数的动态调整。该方法能够有效保证系统在起动过程中全时段维持软开关状态。
附 录
 (A1)
(A1)
 (A2)
(A2)
 (A3)
(A3)
 (A4)
(A4)
 (A5)
(A5)
 (A6)
(A6)
 (A7)
(A7)
 (A8)
(A8)
 (A9)
(A9)
 (A10)
(A10)
 (A11)
(A11)
 (A12)
(A12)
 (A13)
(A13)
 (A14)
(A14)
 (A15)
(A15)
 (A16)
(A16)
 (A17)
(A17)
 (A18)
(A18)
参考文献
[1] 郑智强, 翁廷坤, 李卓,等. 基于YBCO高温超导线圈的新型无线供电悬浮系统电能传输特性研究[J]. 电工技术学报, 2024, 39(17): 5278-5288.
Zheng Zhiqiang, Weng Tingkun, Li Zhuo, et al. research on electrical energy transmission characteristics of a novel wireless power supply suspension system based on YBC high-temperature superconducting coils[J]. Transactions of China Electrotechnical Society, 2024, 39(17): 5278-5288.
[2] Liu Wei, Chau K T, Lee C H T, et al. Wireless power and drive transfer for piping network[J]. IEEE Transactions on Industrial Electronics, 2022, 69(3): 2345-2356.
[3] Wang Hui, Chau K T, Liu Wei, et al. A novel speed-sensorless wireless universal motor with bidi- rectional movement[C]//2023 IEEE International Magnetic Conference-Short Papers (INTERMAG Short Papers), Sendai, Japan, 2023: 1-2.
[4] 郑智强, 翁廷坤, 李卓, 等. 基于YBCO高温超导线圈的新型无线供电悬浮系统电能传输特性研究[J]. 电工技术学报, 2024, 39(17): 5278-5288.
Zheng Zhiqiang, Weng Tingkun, Li Zhuo, et al. Characterization of a new wireless power supply suspension system based on YBCO high temperature superconducting coil[J]. Transactions of China Elec- trotechnical Society, 2024, 39(17): 5278-5288.
[5] 周岩, 刘志丹, 李烁涵. 虚拟多输入多输出无线电能与信息同步传输技术[J]. 电工技术学报, 2024, 39(14): 4282-4293.
Zhou Yan, Liu Zhidan, Li Shuohan. Virtual multiple input multiple output simultaneous wireless power and information transfer technology[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4282-4293.
[6] 管乐诗, 程怡, 施震宇, 等. 一种10 MHz高频DC- DC功率变换器及其同步整流技术[J]. 电工技术学报, 2023, 38(18): 5029-5038.
Guan Yueshi, Cheng Yi, Shi Zhenyu, et al. A 10 MHz high frequency DC-DC power converter and its synchronous rectification technology[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 5029-5038.
[7] 陈伟华, 宋宇航, 闫孝姮, 等. 心脏起搏器无线电能传输LCC-LCC磁集成印刷螺旋线圈研究[J]. 电工技术学报, 2024, 39(17): 5289-5299.
Chen Weihua, Song Yuhang, Yan Xiaoheng, et al. Research on wireless power transmission for cardiac pacemakers using LCC-LCC magnetic integrated printed spiral coil[J]. Transactions of China Elec- trotechnical Society, 2024, 39(17): 5289-5299.
[8] 蒋金橙, 王佩月, 冯天旭, 等. 基于准双向三态协同调度的无人车和无人机逐级式无线充电应用[J]. 电工技术学报, 2024, 39(22): 6965-6979.
Jiang Jincheng, Wang Peiyue, Feng Tianxu, et al. AGV and UAV stepwise wireless charging appli- cation based on quasi bidirectional three-state collaborative progressive method[J]. Transactions of China Electrotechnical Society, 2024, 39(22): 6965- 6979.
[9] 张俊伟, 赵晋斌. 基于支路振荡法E类逆变器软开关实现研究[J]. 电力系统保护与控制, 2021, 49(1): 133-140.
Zhang Junwei, Zhao Jinbin. Research on soft switch implementation of an E-type inverter based on the branch oscillation method[J]. Power System Pro- tection and Control, 2021, 49(1): 133-140.
[10] 李再男, 贾科, 刘子奕, 等. 半桥型MMC直流侧故障恢复过程过流机理及抑制方法[J]. 电力系统自动化, 2023, 47(23): 180-188.
Li Zainan, Jia Ke, Liu Ziyi, et al. Overcurrent mechanism and suppression method for DC-side fault recovery process of half-bridge modular multilevel converter[J]. Automation of Electric Power Systems, 2023, 47(23): 180-188.
[11] 葛凯梁, 仇钧, 朱海. 基于中继线圈的电动汽车静态无线充电系统抗偏移性能提升研究[J]. 电源学报, 2023, 21(6): 35-42.
Ge Kailiang, Qiu Jun, Zhu Hai. Research on improving anti-offset performance of static wireless charging system for electric vehicles based on relay coils[J]. Journal of Power Supply, 2023, 21(6): 35-42.
[12] 李厚基, 刘明, 杨煜志, 等. 基于E类逆变电路的宽负载范围软开关无线充电补偿网络研究[J]. 中国电机工程学报, 2022, 42(20): 7375-7386.
Li Houji, Liu Ming, Yang Yuzhi, et al. Research on wide load range soft switching wireless charging compensation network based on Class E inverter circuit[J]. Proceedings of the CSEE, 2022, 42(20): 7375-7386.
[13] 李振杰, 杨学智, 马骏,等. 动态无线充电用主从协同式接收线圈设计与研究[J]. 电源学报, 2023, 21(6): 176-183.
Li Zhenjie, Yang Xuezhi, Ma Jun,et al. Design and research of master-slave cooperative receiving coil for dynamic wireless charging[J]. Journal of Power Supply, 2023, 21(6): 176-183.
[14] Zhang Junwei, Zhao Jinbin, Mao Ling, et al. ZVS operation of class-E inverter based on secondary side zero compensation switching at variable coupling coefficient in WPT[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 1022-1031.
[15] Liu Yuxin, Huang Rundong, Dong Zhiping, et al. Design and control of a novel wireless permanent magnetic AC motor with compact structure[J]. IEEE Transactions on Industrial Electronics, 2024, 71(11): 13778-13789.
[16] Hui Wang, Chau K T, H T Christopher Lee, et al, Design, analysis, and implementation of wireless shaded-pole induction motors[J]. IEEE Transactions on Industrial Electronics, 2021, 68(8): 6493-6503.
[17] Jiang Chaoqiang, Chau K T, Liu Chunhua, et al. Design and analysis of wireless switched reluctance motor drives[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 245-254.
[18] Lai C M, Lin Detai, Liu Haoen, et al. A single-stage DC motor driver based on class-E resonant wireless power transfer technique[C]//2023 IEEE Trans- portation Electrification Conference and Expo, Asia- Pacific (ITEC Asia-Pacific), Chiang Mai, Thailand, 2023: 1-7.
[19] 黄晓生, 陈为, 陈庆彬. 用于WPT的双路E类逆变器功率合成拓扑及其电感耦合集成[J]. 中国电机工程学报, 2015, 35(21): 5577-5584.
Huang Xiaosheng, Chen Wei, Chen Qingbin. Topo- logy of the power combination with dual Class E inverters and magnetics integration of coupled inductors for WPT applications[J]. Proceedings of the CSEE, 2015, 35(21): 5577-5584.
[20] Li Y F. Auto-tuning controller design of Class E inverter with resonant components varying[C]//2012 IEEE International Symposium on Industrial Elec- tronics, Hangzhou, China, 2012: 217-221.
[21] Li Y F, Tseng C S. Tracking control of Class E inverter for the duty cycle control[C]//2014 IEEE 23rd International Symposium on Industrial Elec- tronics (ISIE), Istanbul, Turkey, 2014: 2643-2647.
[22] Aldhaher S, Luk P C, Whidborne J F. Tuning Class E inverters applied in inductive links using saturable reactors[J]. IEEE Transactions on Power Electronics, 2014, 29(6): 2969-2978.
Abstract With the rapid development of robotics technology, robots are increasingly applied in fields like industrial automation, smart homes, and healthcare. However, as robot application scenarios diversify, traditional wired power supply methods limit robotic arm flexibility due to complex wiring and space constraints, making it hard to meet growing demands. In contrast, through non-contact power transfer, wireless power supply technology addresses traditional cables' drawbacks and has become a key alternative in robotics. Particularly, wireless power transfer (WPT) systems based on E-class inverters with high-frequency and efficient inversion characteristics are ideal for powering robotic joint motors. However, a major challenge for E-class inverters is that during DC motor startup, dynamic load changes often lead to hard-switching during startup, increasing switching losses, reducing efficiency, and potentially damaging switches. This paper proposes a dynamic secondary capacitance matching method to address the persistent hard-switching problem during motor startup and ensure soft switching throughout.
First, this paper investigates the variation of load characteristics during the startup to steady-state operation of a DC motor. Experiments reveal that, during the initial startup phase, the current increases rapidly, causing the equivalent impedance of the load to change quickly. As a result, the reflected impedance exceeds the design range of the E-class inverter, entering a hard-switching state, which increases switching losses and reduces system efficiency. Next, the paper models the E-class inverter and analyzes the load variation range under soft-switching conditions. Accordingly, a dynamic matching strategy is proposed to ensure the system maintains soft switching throughout the startup phase, improving system performance and reliability.
An experimental prototype with a power rating of 50 W is constructed, with an input voltage of 40 V and an input current of 1.25 A. The output voltage is 24 V, the output current is 1.81 A, and the output power is approximately 43.44 W, resulting in an efficiency of 86.9%. The loss is 6.56 W. In the experiment, when the secondary side is normally compensated, the system operates in a hard-switching state at startup due to the sizeable equivalent load. However, hard switching gradually decreases as the DC motor starts, and after 1.4 ms, the system enters a soft-switching state and remains stable. When the secondary side is zero-compensated at startup, the system remains soft-switching throughout the startup process. When the system switches at 0.52 ms, its response time is approximately 25 ms, and the system quickly stabilizes and maintains soft switching. The startup time required for the zero-compensation strategy of the secondary capacitor is only about one-third of the time for the normal secondary-side compensation startup.
The following conclusions can be drawn. (1) During DC motor startup, the current surges and then stabilizes, while the equivalent resistance increases. The reflected impedance decreases. When it exceeds the optimal design value, ZVS is not maintained, leading to hard switching. (2) Removing the secondary compensation capacitor during startup and using full compensation under rated conditions can dynamically adjust the inverter’s load parameters, ensuring soft switching throughout startup.
keywords:Wireless power, Class E inverter, dynamic capacitor matching, robotic DC motor, soft switching
DOI: 10.19595/j.cnki.1000-6753.tces.242122
中图分类号:TM614
上海自然科学基金资助项目(21ZR1425300)。
收稿日期 2024-11-26
改稿日期 2025-01-06
毛 玲 女,1981年生,副教授,研究方向为电动汽车有序充电、动力电池建模、状态估计及梯次利用、电动汽车与电网的互动等。E-mail: maoling2290@shep.edu.cn
赵晋斌 男,1972年生,博士生导师,研究方向为电力电子电路、装置和系统、智能和模块化控制电力电子电路等。E-mail: zhaojinbin@shiep.edu.cn(通信作者)
(编辑 陈 诚)