图1 共形式磁耦合机构
Fig.1 Omnidirectional common form magnetic coupler
摘要 针对传统无人机(UAV)无线电能传输(WPT)系统中耦合机构的共形化程度低和抗偏移能力弱的问题,该文提出一种基于共形式磁耦合机构的全方向偏移容忍性UAV-WPT系统。首先通过数学模型和COMSOL有限元仿真,分析发射机构的磁场分布特性,在此基础上给出发射机构磁场空间分布表达式。然后通过电路模型分析所提出系统的偏移性能和对于不同种类无人机的适应性。接着对耦合机构进行设计,给出提升系统偏移性能和普适性的耦合机构参数设计方法,并对磁耦合机构的偏移性和共形化进行验证。最后搭建实验装置进行验证,实验结果表明:系统发生平面±20 mm偏移时系统输出电压维持在25.16 V,最优效率达到89.2%,在任意旋转偏移角度下系统输出电压维持在25.16 V,系统最优效率达到90.2%。实验结果有效地验证了该文所提出的共形式磁耦合机构对于提升UAV-WPT的共形化程度和抗偏移性能的可行性和有效性。
关键词:无人机 无线电能传输 共形式磁耦合机构 抗偏移
随着智能化和无人化场景应用的快速推进,无人机(Unmanned Aerial Vehicle, UAV)的发展进入了新阶段,不仅追求使用效能更高、续航时间更长,而且要求可快速部署,其应用领域的拓展也从需求侧刺激了UAV性能的进一步优化升级,其中一个很重要的需求就是巡航范围的提升,这在性能上体现为无人机续航里程的提升[1-6]。为提高续航里程,无人机需在长距离或自动巡检途中进行充电。目前无人机主要的充电方式有传统有线充电和新型无线充电。传统的有线充电功率范围大、效率高,但需要将UAV与充电器通过物理连接方式进行充电,这种接触充电方式长期使用容易产生接触磨损等问题,需定期更换触片及人工维护,同时在雨水或潮湿环境下存在漏电安全风险,与UAV自动化的未来方向背道而驰。
无线电能传输(Wireless Power Transfer, WPT)技术可以通过非物理接触实现能量的无线传输,具有安全性好、可靠性强和自动化程度高等优势,已广泛应用于医疗、电动汽车、水下设备、异物检测、航空航天、军事等多个领域,其中磁耦合式无线电能传输技术最为成熟[7-16]。UAV的高效无线充电将是推动UAV智能化发展的创新性方法,UAV无线充电基站的布置可以弥补UAV飞行续航短的局限性,提升UAV巡检系统的自动化水平[17-18]。
传统的无线电能传输系统中的发射线圈通常为圆形和方形线圈,无人机降落受外界风力、信号等影响引起的平面偏移和旋转偏移会直接影响磁耦合机构的耦合特性,进而影响UAV-WPT系统的稳定运行[19]。
为解决UAV-WPT系统的偏移性问题,国内外学者主要从耦合机构的设计形式展开研究。文献[20]提出了一种阵列式发射线圈,能够根据UAV着陆位置激活与接收线圈耦合强度最大的发射线圈,实现了无人机偏移后最大功率和效率充电,在任意位置充电效率都可达到85%以上,有效地解决了无人机偏移后充电功率和效率低的问题。然而,阵列式发射线圈增加了发射线圈的数量,同时引入了复杂的控制算法。文献[21]提出了一种将大发射线圈与单匝接收线圈相结合的耦合机构,利用直径为40 cm的发射线圈,实现了40 mm的偏移。文献[22]提出了一种基于准均匀磁耦合机构的广域充电系统,在±10 cm偏移范围内,发射线圈都能产生几乎恒定的磁场,有效地扩展了充电区域,该系统的有效充电面积为扩展前的近20倍。文献[23]提出了一种接收端磁集式耦合机构,基于二次集成的补偿拓扑及其调谐方法,实现了传输效率和输出功率在±150 mm的水平偏移内保持稳定,同时实现了负载从5 W到50 W变化时,电流波动为±2.5%的恒流输出,但该系统不适用于多种类型的无人机。文献[24]提出了一种可重构式电场无人机无线电能传输系统,在±100 mm平面偏移和0°~360°角度偏移下,输出电流和效率都保持稳定。文献[25]提出了一种新型多线圈耦合器,提升系统平面偏移容忍性,但该耦合器结构复杂,不适用于多类型无人机。
综上所述,目前所提出的无人机抗偏移系统虽然在一定程度上提升了系统的平面偏移容忍性,但大多数没有考虑角度偏移,且仅适用特定种类的无人机,存在对多数种类的无人机不适用等问题。同时无人机腹部通常带有传感器以及下视摄像头,使得大部分平面线圈无法在飞机底部使用,这对接收线圈的小型化和隐藏性提出了新的要求。
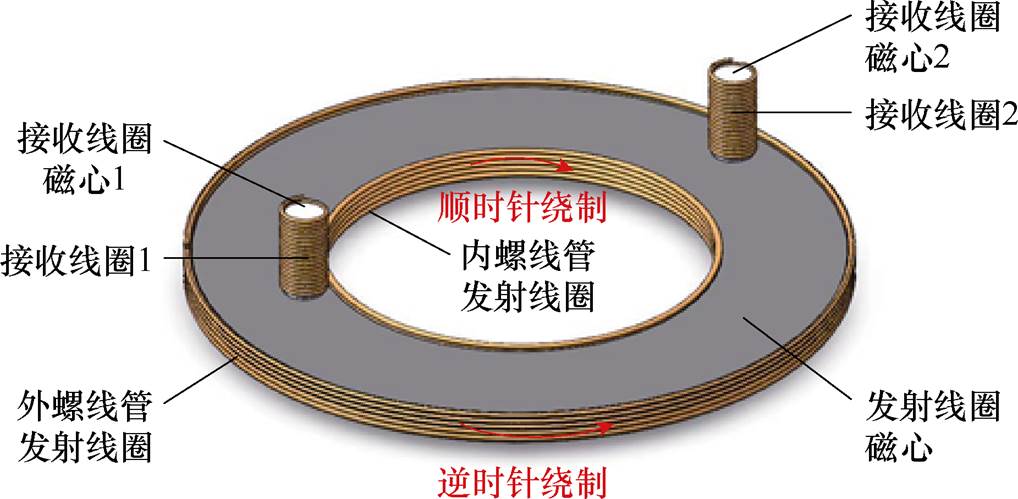
为此,本文提出了一种共形式磁耦合机构,该磁耦合机构的发射线圈由两个反向绕制的同轴竖直螺旋管线圈串联组成,接收线圈由两个同向绕制的竖直螺线管线圈串联组成,两个反向绕制的发射线圈可以在平面产生增强式的均匀磁场,有助于提升系统的抗偏移性能。两个同向绕制的竖直螺线管接收线圈可以适配多种类型的无人机脚架,且不影响无人机云台及下视传感器,因此可以显著提高其对于脚架的适配能力,适用于多种无人机。本文首先分析了共形式磁耦合机构的磁场分布特性,给出了发射线圈磁场在空间中分布的表达式。其次基于该耦合机构,通过磁场分布分析了其抗偏移原理,针对耦合机构抗偏移性能和对不同种类无人机适应性情况,给出了耦合机构设计参数设计方法。再次对所提出的共形式磁耦合机构进行了抗偏移性和共形化验证。最后搭建了一套无线充电实验平台,验证了所提方案有效性。
本文提出的共形式磁耦合机构如图1所示,该耦合机构发射线圈由两个反向绕制的竖直同轴螺线管线圈串联组成,接收线圈由两个同向绕制的竖直非同轴螺线管线圈串联组成。
图1 共形式磁耦合机构
Fig.1 Omnidirectional common form magnetic coupler
该共形式磁耦合机构的优势为:①发射线圈产生的环形磁场区域能够容忍无人机降落时产生的全方向旋转偏移;②在一定程度的平面偏移范围内,发射线圈产生的磁场是均匀的,能够提升系统的平面抗偏移性能;③其接收线圈为两个串联绕制的螺线管线圈,能够适配多种类型的无人机,且占用较小的体积,隐蔽性能高,提升了对无人机的适配性。
由于该磁耦合机构能够容忍全方向旋转偏移,且接收线圈适配多种无人机脚架结构实现了共形化,故本文将这种磁耦合机构称为共形式磁耦合机构。
本文提出的强抗偏移性无人机无线电能传输系统主要由一个直流电源、一个全桥逆变器、发射端谐振补偿网络、发射线圈、接收线圈、接收端谐振补偿网络、同步整流滤波电路、负载及PID控制组成,系统结构如图2所示。
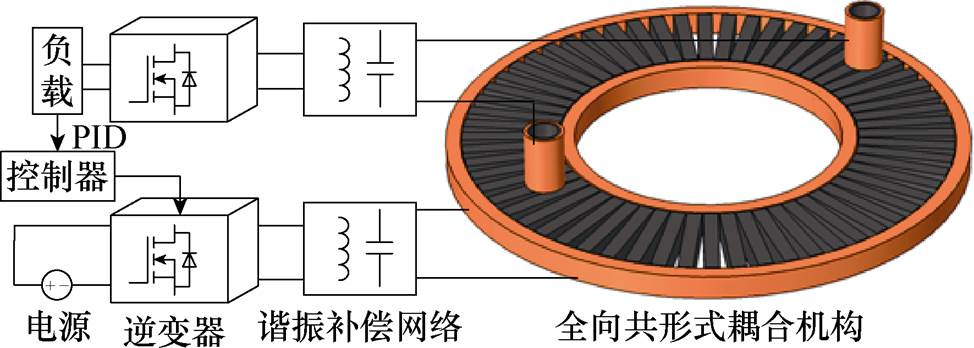
图2 系统结构
Fig.2 The structure of the system
接收线圈的偏移用平面偏移、角度偏移和倾斜度偏移来表示,其定义如图3所示。平面偏移定义为xOy平面任一轴线上的径向偏移,角度偏移定义为接收线圈轴线与x轴的夹角qR,倾斜偏移定义为接收螺线管线圈轴心连线中点垂直方向偏移z轴的角度qB。在初始时刻,平面偏移为0°,qR=qB=0°。
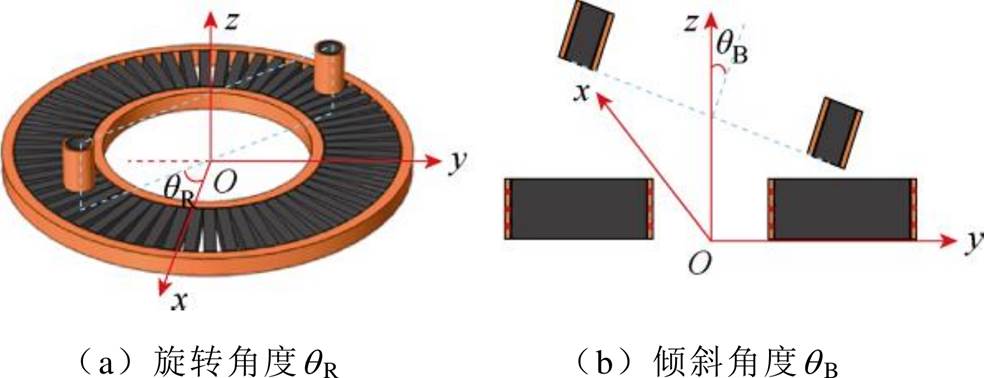
图3 接收线圈偏移定义
Fig.3 Definition of misalignment of receiver
本文中,发射线圈由2个反向绕制的同轴螺线管线圈串联而成,故本文在分析时建立圆环坐标系进行分析。图4为圆环坐标,P为空间中任意一点,其坐标为 (x, y, z),R为圆环半径;j 为圆环上一点A(x1, y1, 0) 中心连线与x轴的夹角。
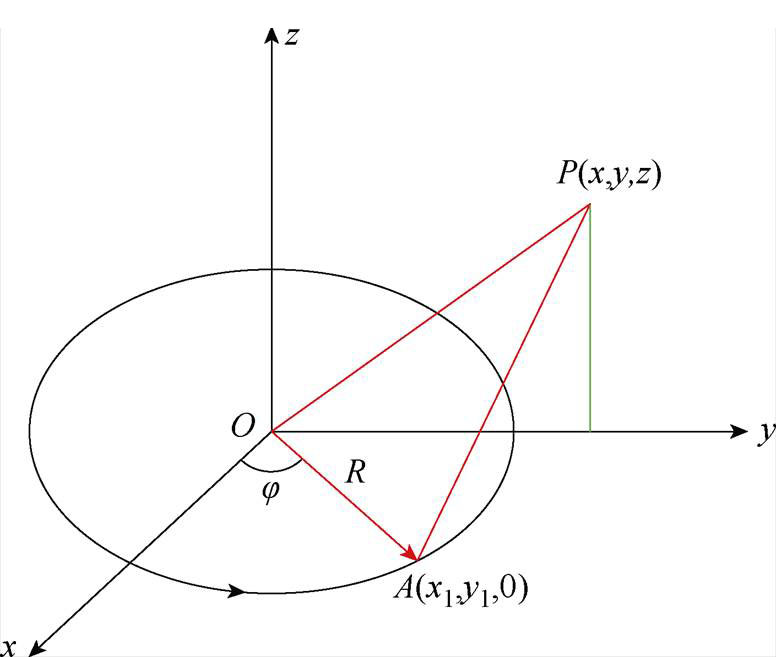
图4 圆环坐标
Fig.4 Circular coordinates
根据毕奥-萨伐尔定律,载流导线在空间中任意一点产生的磁感应强度B可表示为
 (1)
(1)
式中, 为真空磁导率;I为流过通电导线的电流;dL为源电流的微小线元素;r为电流元指向待求场点的单位向量;r为微小线元素与空间一点P之间的距离,则P点的磁感应强度为
为真空磁导率;I为流过通电导线的电流;dL为源电流的微小线元素;r为电流元指向待求场点的单位向量;r为微小线元素与空间一点P之间的距离,则P点的磁感应强度为
 (2)
(2)
其中

式中,dm为发射线圈螺线管半径,m=1, 2,m=1表示外螺线管,m=2表示内螺线管; 分别为x、y和z三个方向的单位矢量,内、外螺线管发射线圈在任意一点P处产生的磁感应强度
分别为x、y和z三个方向的单位矢量,内、外螺线管发射线圈在任意一点P处产生的磁感应强度 可表示为
可表示为
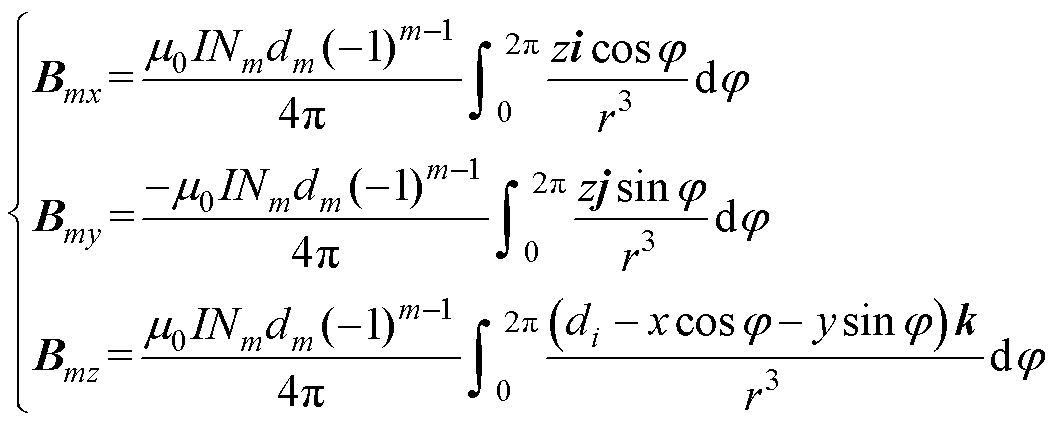 (3)
(3)
式中,Nm为线圈m的匝数。
在P点处合成磁感应强度B可以表示为
 (4)
(4)
根据式(4)可计算出发射线圈在空间中产生的磁感应强度,并绘制了如图5所示的发射线圈磁感应强度等高线。由图5可知,在两个同轴螺线管中间的环形区域,磁感应强度分布均匀,且强度较强;对于内螺线管发射线圈内部和外螺线管发射线圈外部区域,磁感应强度较弱。
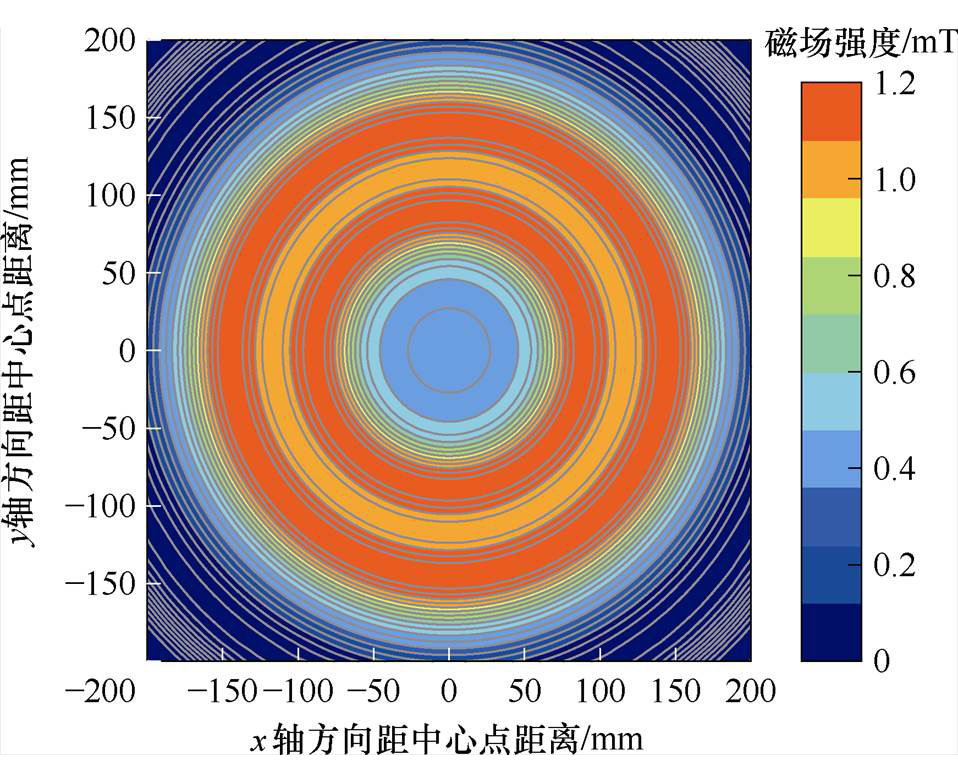
图5 磁场强度等高线
Fig.5 Magnetic field intensity contour map
为验证上述分析的有效性,建立了基于全向共形式磁耦合机构的COMSOL有限元仿真模型,得到发射线圈的磁场分布如图6所示。由图6可知,两个发射线圈中间的环形区域磁感应强度分布均匀且较强,外发射线圈外部和内发射线圈内部区域磁感应强度较弱,仿真结果与理论分析一致。
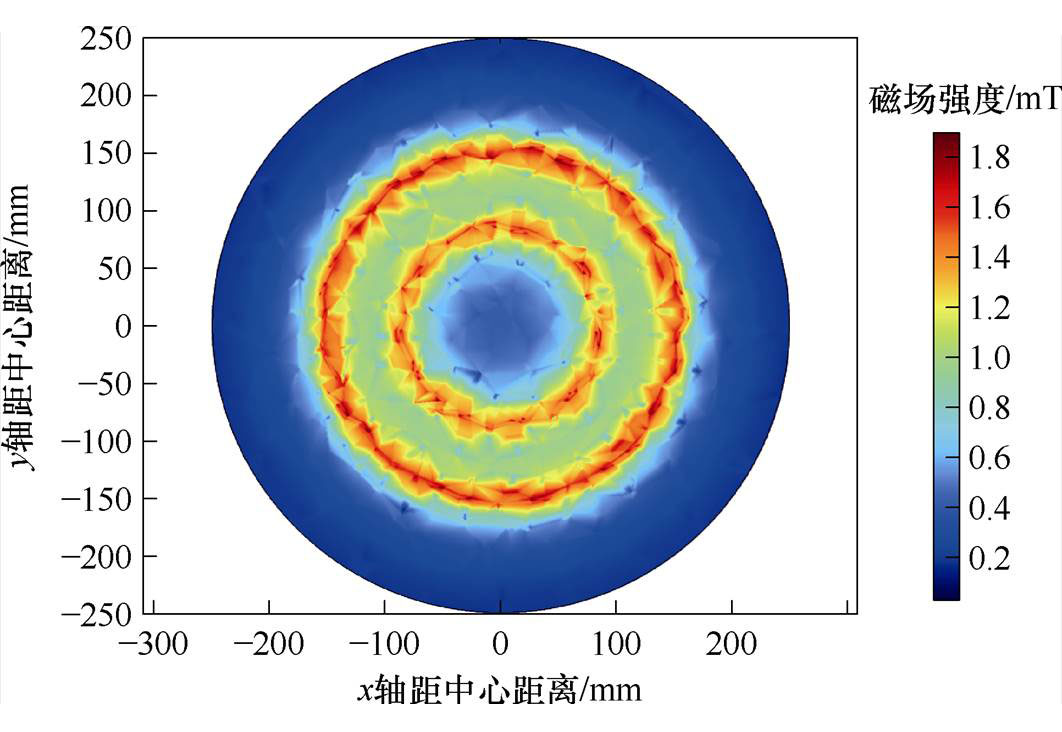
图6 发射线圈磁场分布
Fig.6 Distribution of magnetic field in the transmitting coil
为分析本文所提出的基于全向共形式磁耦合机构UAV-WPT系统的抗偏移性能,针对无人机无线电池负载特性及随时脱离充电场景的需求,本文选取具有恒压输出特性且接收端可以开路的LCC-S谐振补偿网络,建立了如图7所示的电路拓扑。系统中各符号定义见表1。
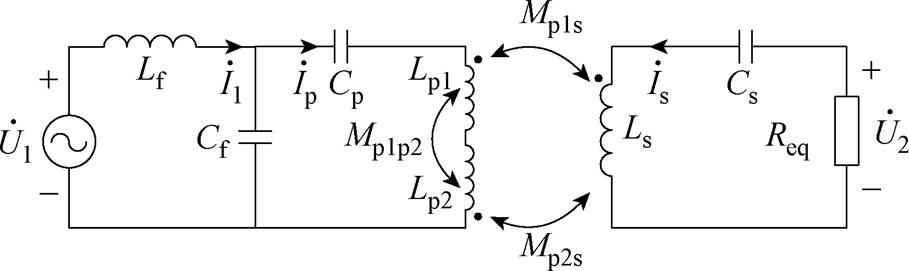
图7 系统电路拓扑
Fig.7 System circuit topology
表1 电气参数的定义
Tab.1 Description of electrical parameters
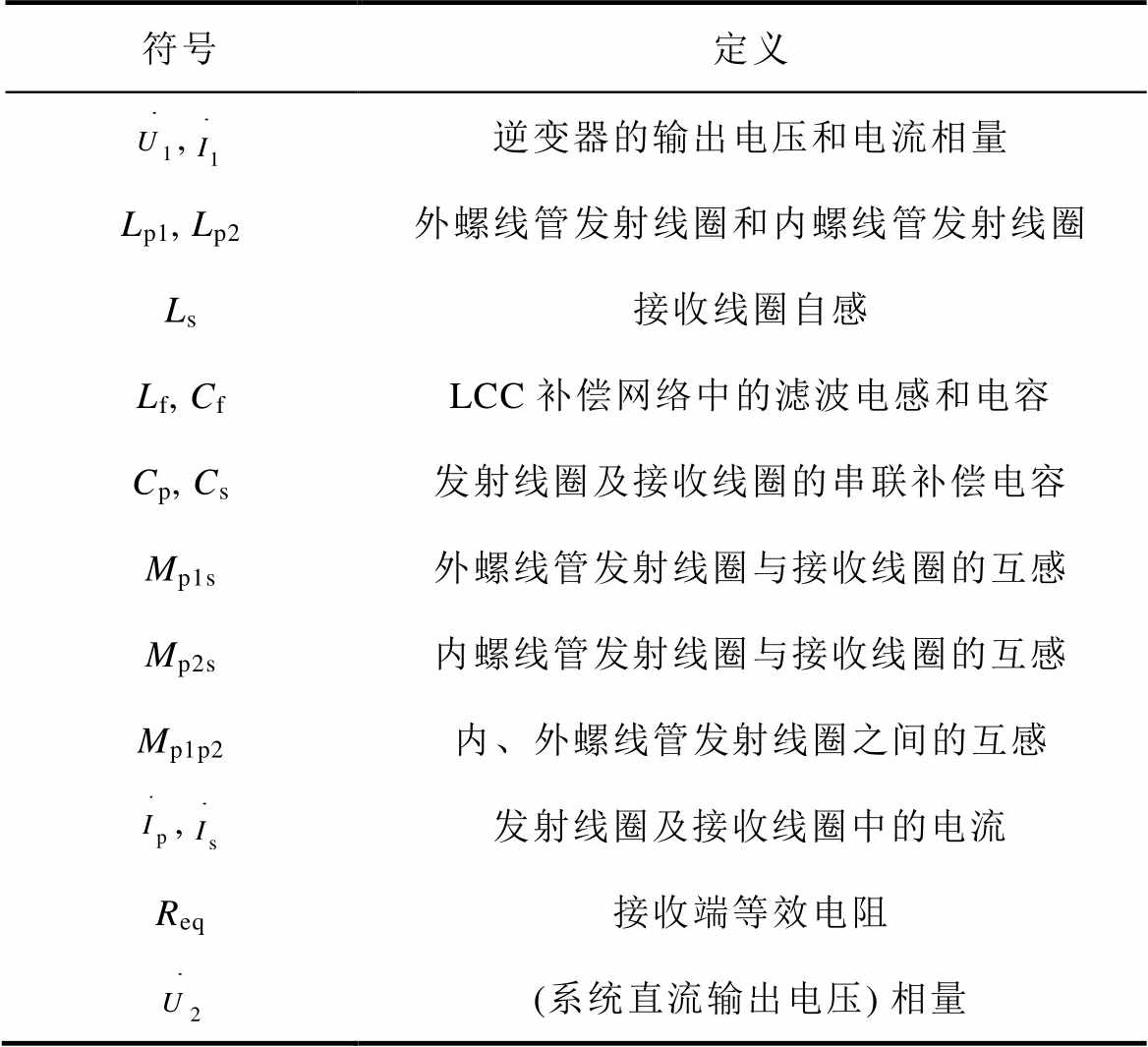
符号定义 ,逆变器的输出电压和电流相量 Lp1, Lp2外螺线管发射线圈和内螺线管发射线圈 Ls接收线圈自感 Lf, CfLCC补偿网络中的滤波电感和电容 Cp, Cs发射线圈及接收线圈的串联补偿电容 Mp1s外螺线管发射线圈与接收线圈的互感 Mp2s内螺线管发射线圈与接收线圈的互感 Mp1p2内、外螺线管发射线圈之间的互感 ,发射线圈及接收线圈中的电流 Req接收端等效电阻 (系统直流输出电压) 相量
根据基尔霍夫电压定律得
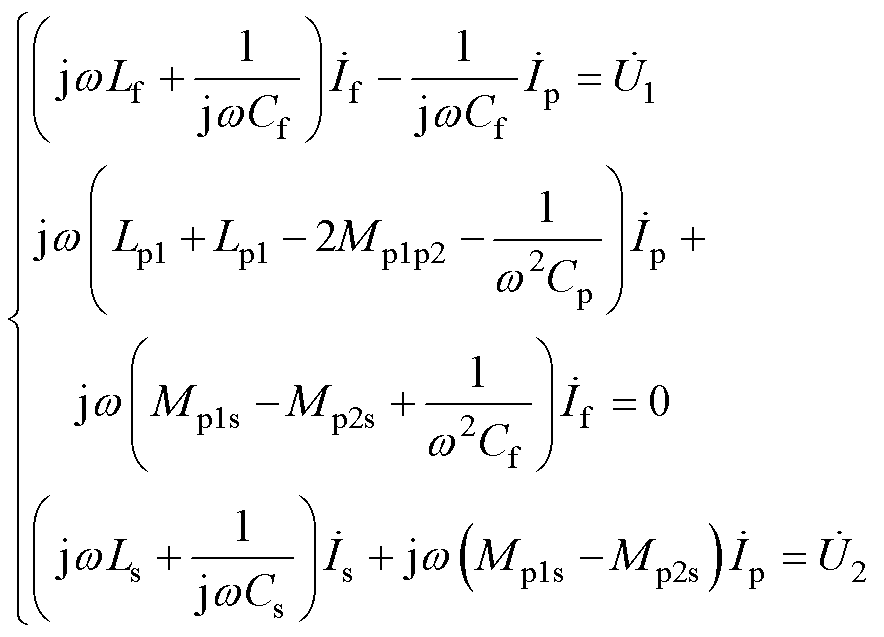 (5)
(5)
式中,w为系统工作角频率。
系统工作过程中,内螺线管发射线圈和外螺线管发射线圈位置相对固定,故Mp1p2为定值,内外螺线管发射线圈反向串联连接,故内外螺线管发射线圈与接收线圈的互感可以等效为一个互感值,因此,可令Lp1+Lp2-2Mp1p2=Lp,Mp1s-Mp2s=M,M为等效互感,则式(5)可以化简为
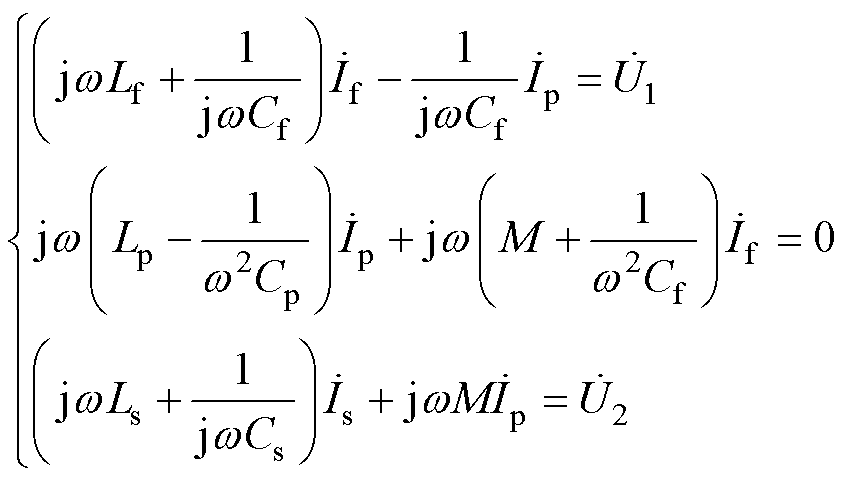 (6)
(6)
当Cf=1/(w2Lf),Cp=1/[w2(Lp-Lf)]和Cs=1/(w2Ls)时,系统处于谐振状态,此时系统直流输出电压可表示为
 (7)
(7)
由式(7)可知,本文所提出的全向共形式磁耦合机构可以等效为传统的单发射单接收耦合机构,其特性与传统耦合机构特性相同。
通过接收线圈的磁通量可以表示为
 (8)
(8)
式中,S为接收线圈底部截面积;q为磁感应强度B与平面S法线方向的夹角。
 (9)
(9)
由式(7)可知,当系统参数确定后, 和Lf为定值,故系统输出电压仅与互感M相关。当系统发生偏移时,保持等效互感M稳定,可以使输出电压
和Lf为定值,故系统输出电压仅与互感M相关。当系统发生偏移时,保持等效互感M稳定,可以使输出电压 稳定。由式(9)可知,等效互感M与通过接收线圈的磁通量F成正比,由式(8)可知,F与磁感应强度B成正比,由1.2节分析可知,在内外螺线管发射线圈中间区域,磁感应强度B分布均匀,故在此区间内发射线圈和接收线圈之间的互感M也是均匀的,因此,本文所提出的方法能够提升系统抗偏移性能。
稳定。由式(9)可知,等效互感M与通过接收线圈的磁通量F成正比,由式(8)可知,F与磁感应强度B成正比,由1.2节分析可知,在内外螺线管发射线圈中间区域,磁感应强度B分布均匀,故在此区间内发射线圈和接收线圈之间的互感M也是均匀的,因此,本文所提出的方法能够提升系统抗偏移性能。
目前常见的无人机脚架大致可以分为三种:倒p型脚架、倒T型脚架、立杆型脚架。图8所示为使用上述三类脚架的无人机外形。

图8 无人机脚架类型分类
Fig.8 UAV stand type classification
由图8可知,目前三类无人机脚架都存在竖直部分或与竖直方向夹角小于90°部分,不同类型无人机接收线圈模式如图9所示,目前常用无人机夹角通常为0°~20°。竖直方向通过接收线圈的磁通量如式(8)所示。
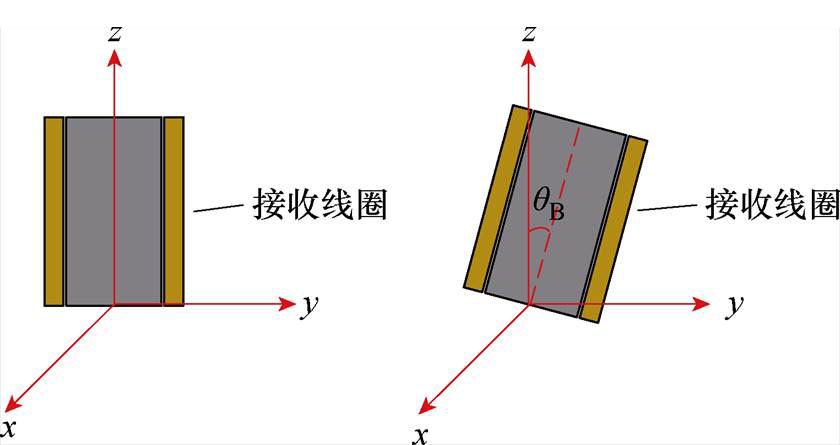
图9 不同类型无人机接收线圈模式
Fig.9 Different types of unmanned aerial vehicle receiving coil modes
通过接收线圈的磁通量如图10所示,可以看出,qB从0°~90°变化时,接收线圈都有磁通量通过,因此,qB从0°~90°变化时,接收线圈与发射线圈间存在互感。在实际无人机脚架上,竖直脚架部分与z轴的夹角不会达到90°,故本文所提出的共形式磁耦合机构能够适配不同种类的无人机,共形化程度高。
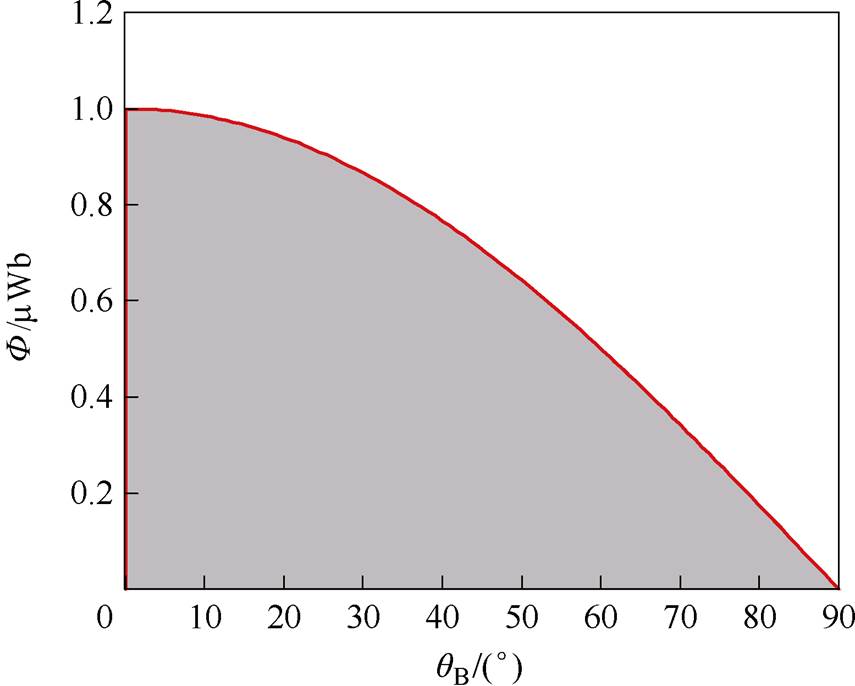
图10 接收线圈磁通量
Fig.10 Receiving coil magnetic flux
为提升系统的抗偏移性能,适配不同种类的无人机,本节将进行耦合机构设计,确定电磁耦合机构的最终参数。定义了全向共形式磁耦合机构的尺寸参数,如图11所示。共形式磁耦合机构参数见表2。
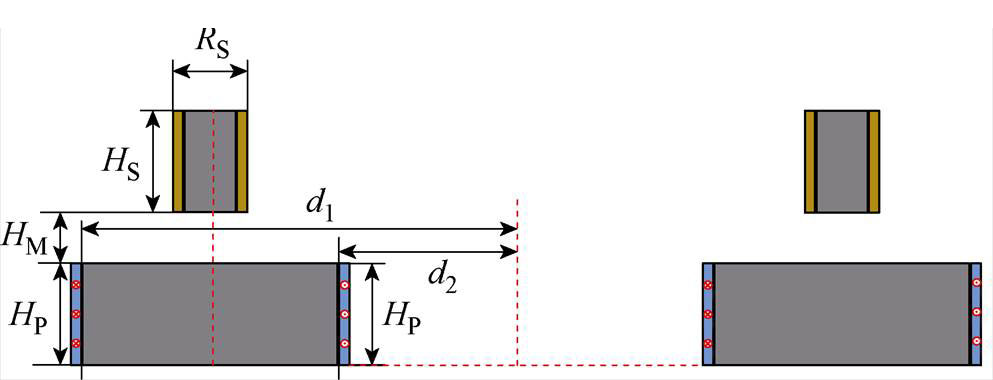
图11 全向共形式磁耦合机构尺寸参数
Fig.11 Parameters of omnidirectional common form magnetic coupler
表2 磁耦合机构参数定义
Tab.2 Parameter definition of magnetic coupling mechanism
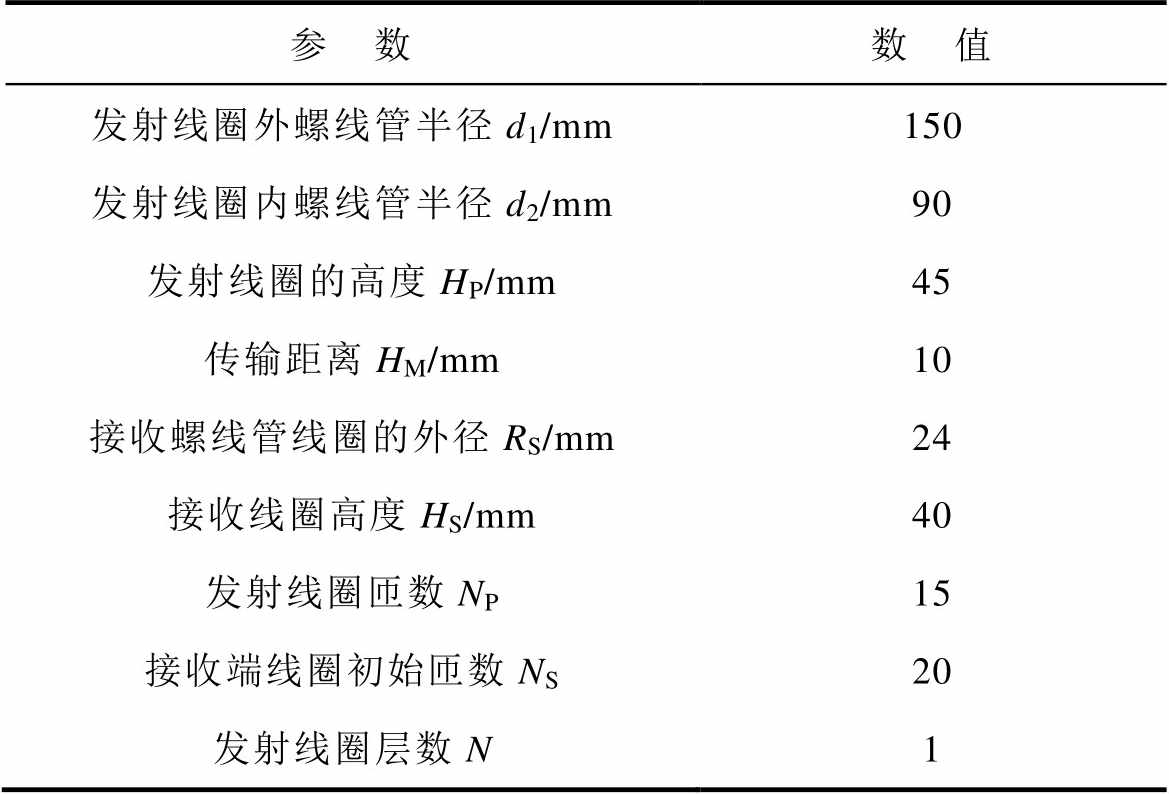
参 数数 值 发射线圈外螺线管半径d1/mm150 发射线圈内螺线管半径d2/mm90 发射线圈的高度HP/mm45 传输距离HM/mm10 接收螺线管线圈的外径RS/mm24 接收线圈高度HS/mm40 发射线圈匝数NP15 接收端线圈初始匝数NS20 发射线圈层数N1
首先对共形式磁耦合机构的磁路进行分析,判断各个参数变化时对耦合系数影响的趋势,并确定参数设计的顺序。
共形式磁耦合机构共轴截面的磁路模型如图12所示。图12中,FP1和FP2分别为内、外螺线管发射线圈的漏磁通量,统称为发射线圈漏磁通FP。FM11、FM12和FM21、FM22分别为内、外螺线管发射线圈传递给接收螺线管线圈1、2的磁通量,统称为耦合机构主磁通FM。FS1和FS2分别为接收螺线管线圈1、2的漏磁通量,统称为接收线圈漏磁通FS。
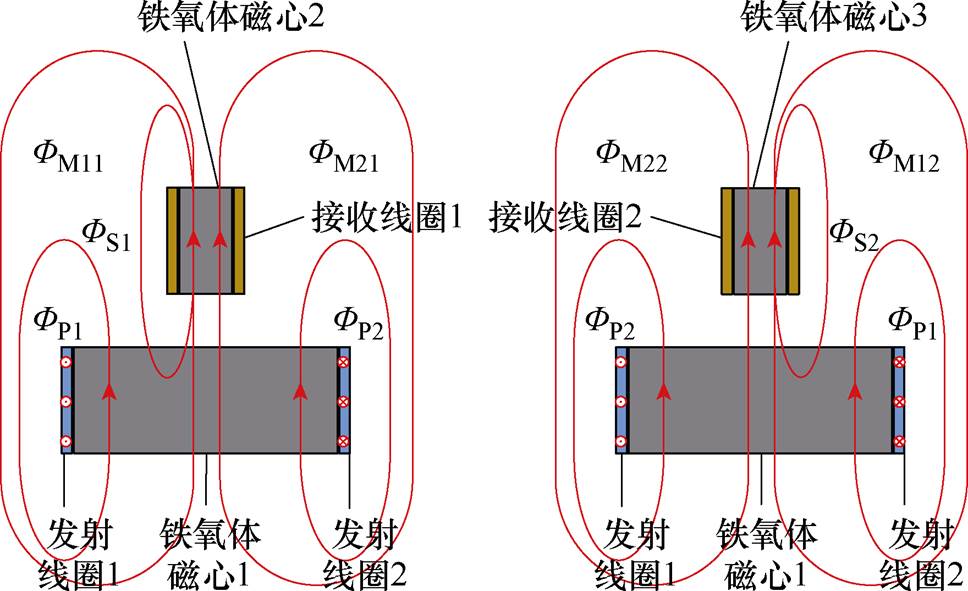
图12 磁耦合机构共轴截面上的磁通量分布
Fig.12 Magnetic flux distribution on the co-axial section of the magnetic coupling mechanism
为提升耦合机构性能,需降低FP、增大FM。根据实际充电需求,设定传输距离HM=10 mm。由磁路分析可知,RS应尽量大,根据实际对象尺寸确定RS=24 mm。
耦合机构主要参数有接收螺线管线圈的高度HS、外螺线管发射线圈半径d1、内螺线管发射线圈半径d2、发射线圈的高度HP、发射线圈的绕线层数N 5个参数。其中,HS主要影响FM,d1、d2和HP主要影响FM和FP,但d1和d2对FM和FP的影响更大,N为发射线圈绕制层数,对FP有一定影响。由于在耦合机构中使用了磁心,导致从数学公式上进行磁场计算较为复杂[21],因此本文采用COMSOL有限元仿真对耦合机构进行设计,其设计流程如图13所示。耦合机构设计流程解释如下:
(1)设置耦合机构初始参数d1、d2、HP、HS 和N。
(2)将HS从初始值以5 mm为步长增加至80 mm,确定耦合系数k与HS的关系,并确定HS的值。
(3)将d1从初始值以5 mm为步长增加至180 mm,确定耦合系数k与d1的关系,并确定d1的值。
(4)将d2从初始值以5 mm为步长增加至90 mm,确定耦合系数k与d2的关系,并确定d2的值。
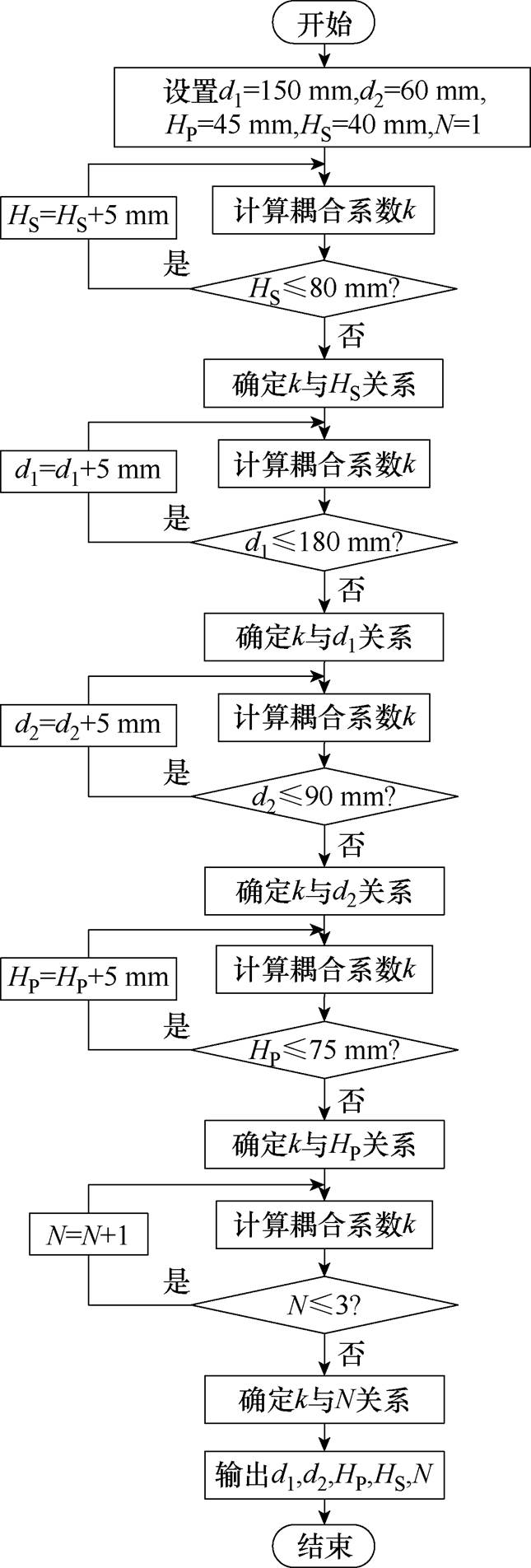
图13 耦合机构参数设计流程
Fig.13 Parameter design flow chart of the coupler
(5)将HP从初始值以5 mm为步长增加至75 mm,确定耦合系数k与HP的关系,并确定HP的值。
(6)将N从初始值以1为步长增加至3,确定耦合系数k与N的关系,并确定N的值。
定义k为耦合系数: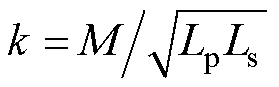 ,本文最终耦合机构参数为:d1=150 mm、d2=90 mm、HP=45 mm、HS=40 mm和N=3。根据图13流程得出的耦合系数与HS、d1、d2、HP和N对应的关系如图14所示。从图14中可以看出,耦合系数k随HS、d2和N的增大而增大,随d1和HP的增大而减小。
,本文最终耦合机构参数为:d1=150 mm、d2=90 mm、HP=45 mm、HS=40 mm和N=3。根据图13流程得出的耦合系数与HS、d1、d2、HP和N对应的关系如图14所示。从图14中可以看出,耦合系数k随HS、d2和N的增大而增大,随d1和HP的增大而减小。
当HS由40 mm增大至80 mm时,耦合系数k由0.069增加至0.093,耦合系数增加幅度为34.8%。HS=40 mm时,耦合系数为0.069,能够满足充电需求,因此本节将接收线圈的高度配置为40 mm。
发射线圈外螺线管半径d1由150 mm增大至180 mm时,耦合系数k由0.064减小至0.044,即发射线圈外螺线管半径越大,耦合系数越小,为增大耦合系数减小发射线圈体积,d1确定为150 mm。发射线圈内螺线管半径d2由60 mm增加至90 mm时,耦合系数k由0.064增大至0.069,由于内螺线管在外螺线管内部,对耦合机构体积不影响,为增大耦合系数,d2确定为90 mm。发射线圈高度HP由45 mm增加至75 mm时,耦合系数k由0.069减小至0.064,发射线圈越高、体积越大,为减小体积,增大耦合系数,发射线圈高度HP确定为45 mm。发射线圈层数由1增加至3时,耦合系数k由0.069增加至0.081,在相同发射线圈匝数下,层数越多,耦合系数越大,为增大耦合系数,发射线圈层数N确定为3。
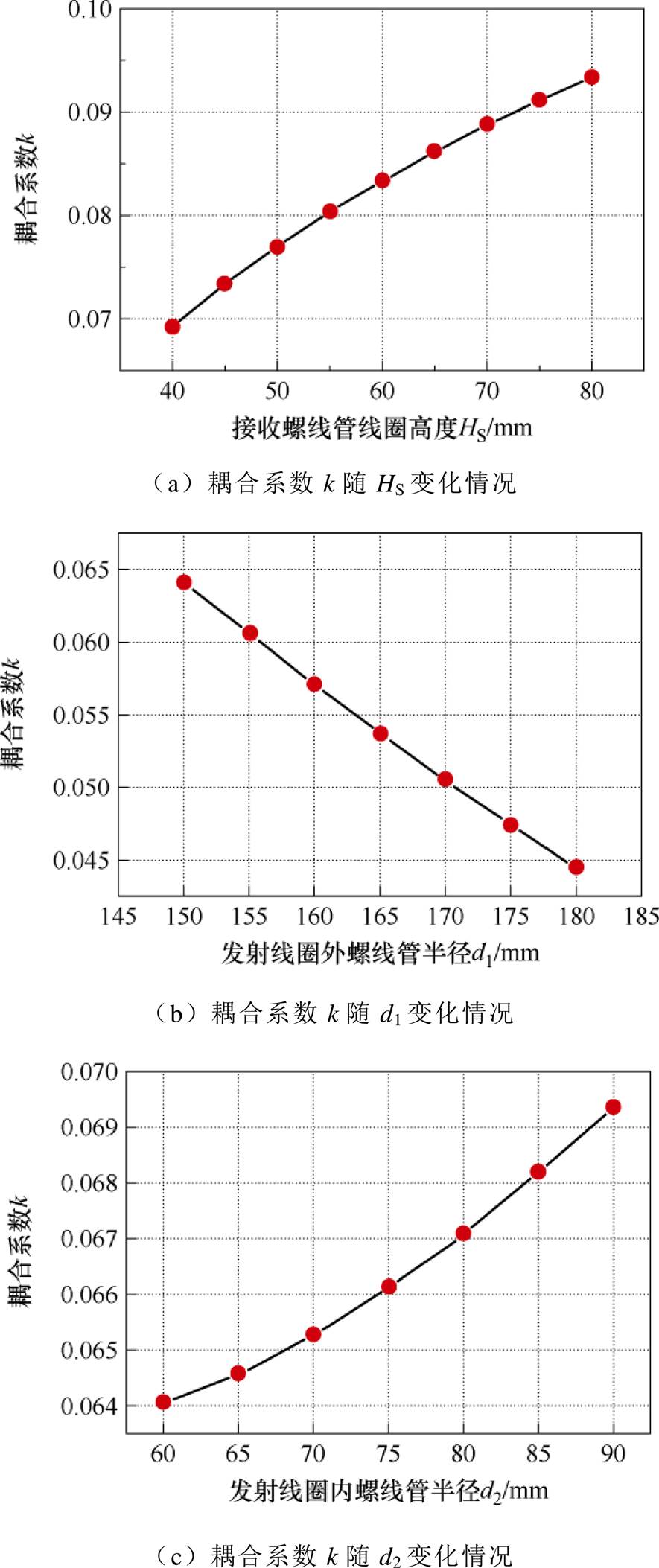
图14 耦合系数k随耦合机构参数变化情况
Fig.14 Variation of the coupling coefficient k with the parameters of the coupler
为验证耦合机构的抗偏移性能,搭建了如图15所示的磁耦合机构实物装置,图15a为发射端装置,图15b为接收端装置,发射端同轴螺线管线圈串联反向绕制,其均为3层15匝。接收端线圈为2个同向串联绕制的螺线管线圈,匝数均为18匝。发射端线圈磁心为90 mm×15 mm×9 mm的条形磁心。接收端线圈磁心采用厚度为0.15 mm、高度为40 mm的软磁片。
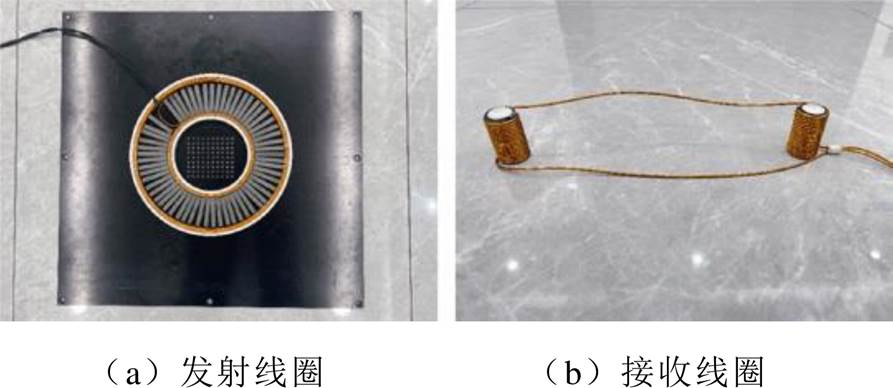
图15 全向共形式磁耦合机构实物装置
Fig.15 Coupling mechanism experimental device
对实际绕制的共形式磁耦合机构进行参数测试,其发射线圈自感Lp、接收线圈自感Ls、互感M、发射线圈内阻、接收线圈内阻和耦合系数k实际测量参数见表3。
表3 全向共形式磁耦合机构性能参数
Tab.3 Performance parameters of the omnidirectional co-form magnetic coupling mechanism
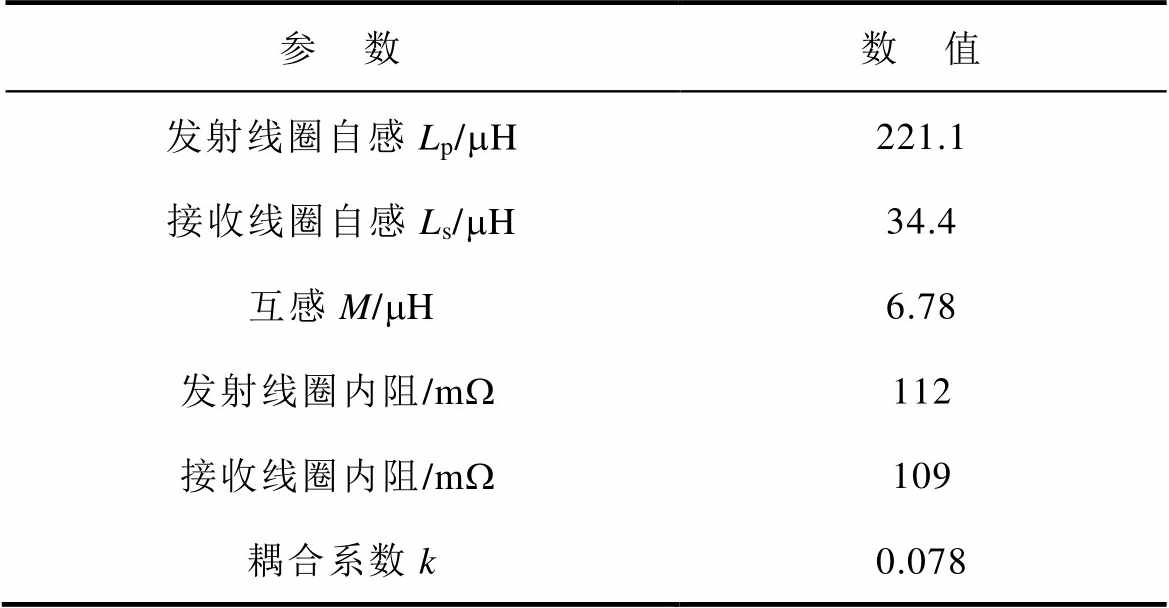
参 数数 值 发射线圈自感Lp/mH221.1 接收线圈自感Ls/mH34.4 互感M/mH6.78 发射线圈内阻/mW112 接收线圈内阻/mW109 耦合系数k0.078
1)平面偏移测试
为验证所提出的全向共形式耦合机构的平面抗偏移性能,测试接收线圈分别在x轴、y轴及qR= 45°径向方向上产生±20 mm的偏移,耦合机构的发射线圈与接收线圈互感M测试结果如图16所示。
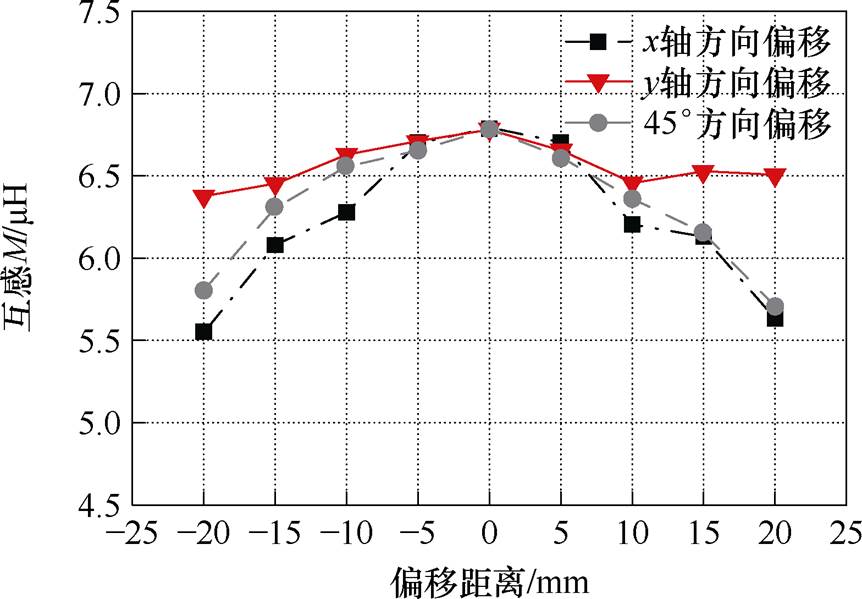
图16 平面偏移时磁耦合机构互感变化
Fig.16 Variation of magnetic coupling mechanism
由图16可知,在三个方向±20 mm偏移范围内,耦合机构互感跌落在1.2 mH内。图中,在x轴方向上产生偏移时,耦合机构性能参数变化最大,在偏移20 mm时互感减小了1.2 mH。在y轴方向上产生偏移时,耦合机构性能参数变化较小,在偏移20 mm时互感仅减小了0.405 mH。
2)旋转偏移测试
为验证所提出的全向共形式耦合机构的旋转抗偏移性能,使接收端分别沿x轴、y轴及qR=45°径向偏移20 mm后,以图3所示 为中心旋转30°、60°、90°、120°、150°、180°,发射线圈自感变化如图17所示,发射线圈与接收线圈互感M测试结果如图18所示。
为中心旋转30°、60°、90°、120°、150°、180°,发射线圈自感变化如图17所示,发射线圈与接收线圈互感M测试结果如图18所示。
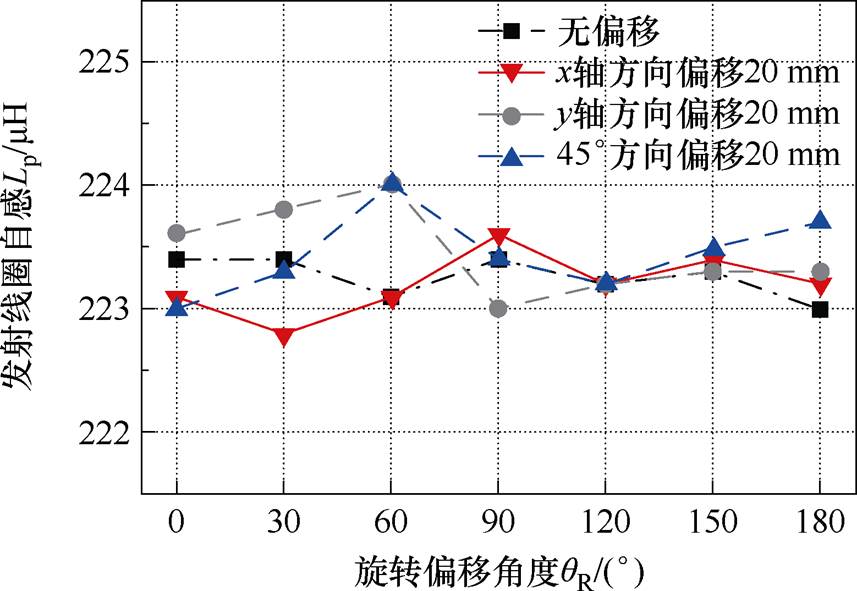
图17 发射线圈自感Lp随旋转偏移变化
Fig.17 Variation of self-inductance with angular misalignment
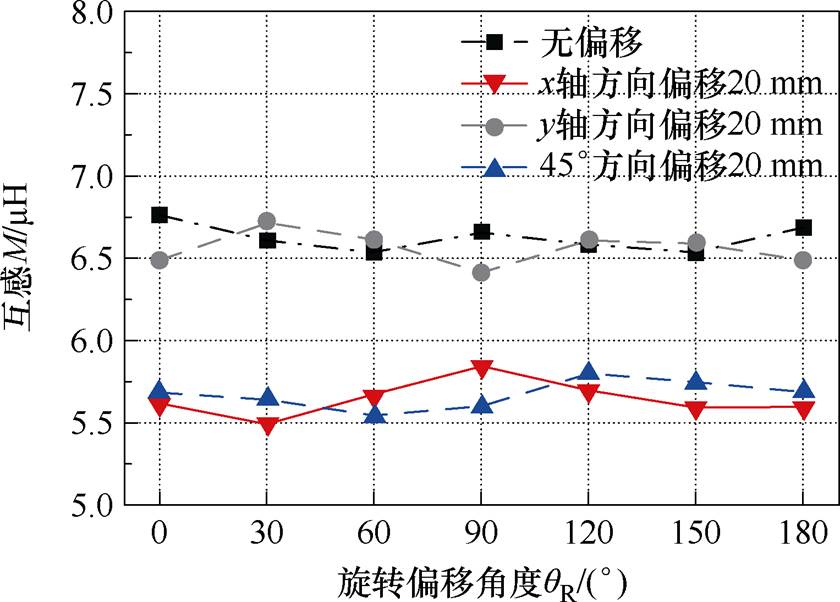
图18 旋转偏移时磁耦合机构互感变化
Fig.18 Variation of magnetic coupling mechanism parameters with angular misalignment
由图17可知,在角度偏移过程中,发射线圈自感在一定范围内变化,而实验中发射线圈谐振电容均为正对时刻的谐振值,故偏移后系统工作在非理想谐振状态。
由图18可知,当接收端在无偏移情况和分别在x轴、y轴及qR=45°径向方向上偏移20 mm后,再产生0°~180°旋转偏移,互感变化在0.3 mH内。验证了耦合机构的强偏移容忍性和参数稳定性。
由于不同类型无人机脚架竖直部分倾斜程度不同,为验证所提出耦合机构对不同种类无人机的适应性,测试在接收线圈不同程度的倾斜下磁耦合机构的性能参数。使接收线圈倾斜角度qB分别为5°、10°、15°、20°,测试磁耦合机构的互感M和耦合系数k,测试结果如图19所示。
测试结果显示,当磁耦合机构接收线圈倾斜 角度由0°向20°变化时,耦合机构互感降低了0.325 mH,但接收线圈倾斜20°后耦合机构的互感和耦合系数仍能支持无人机无线充电系统的正常工作运行,测试结果与仿真结果高度吻合。对于倒p型、倒T型和立杆型无人机,其脚架均有数值或小角度倾斜立杆,本文所提出的耦合机构能够适应 0°~20°范围的立杆倾斜角度,说明该耦合机构能够适用于以上三种无人机,验证了共形式磁耦合机构的高适配性。
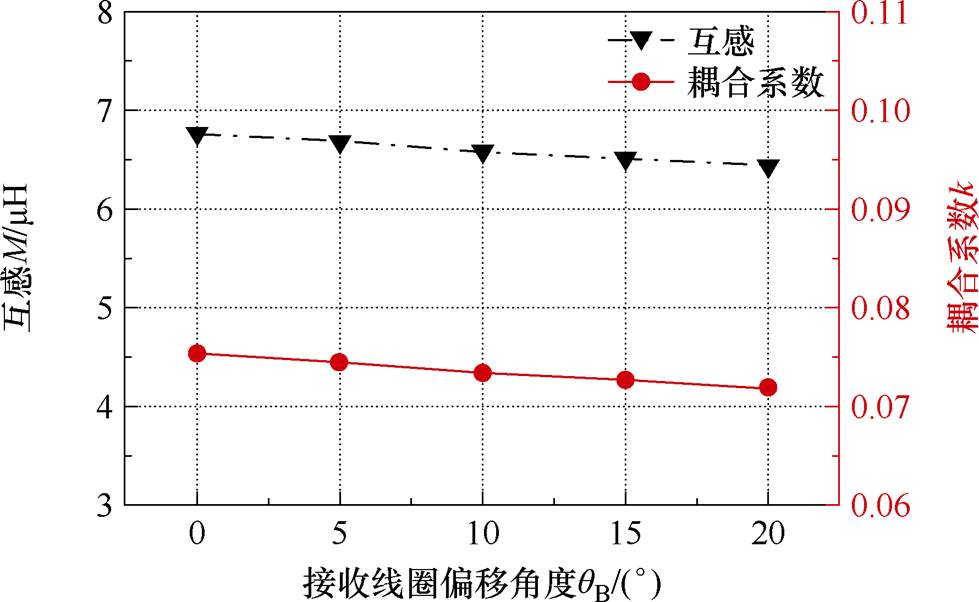
图19 倾斜偏移时磁耦合机构参数变化
Fig.19 Variation of magnetic coupling mechanism parameters during tilt excursion
为验证所提出的基于全向共形式磁耦合机构的UAV-WPT系统的普适性及抗偏移性能,考虑无人机对充电时间要求短和实际充电功率大的情况,基于图15所示设计具有较好抗偏移的共形式耦合机构,为了保障无人机在各种偏移下输出的稳定性,进一步结合PID闭环移相控制方法搭建了如图20所示的实验样机。实验样机具体参数见表4,该样机主要由直流电源、发射端电路板、全向共形式磁耦合机构、接收端电路板、电子负载和示波器组成。其中,发射端电路主要包括全桥逆变电路及其驱动电路、LCC谐振补偿网络、通信模块、发射端微控制器(Microcontroller Unit, MCU)及其周边电路。接收端电路主要包括S谐振补偿网络、同步整流电路及其驱动电路、通信模块、接收端MCU及其周边电路。
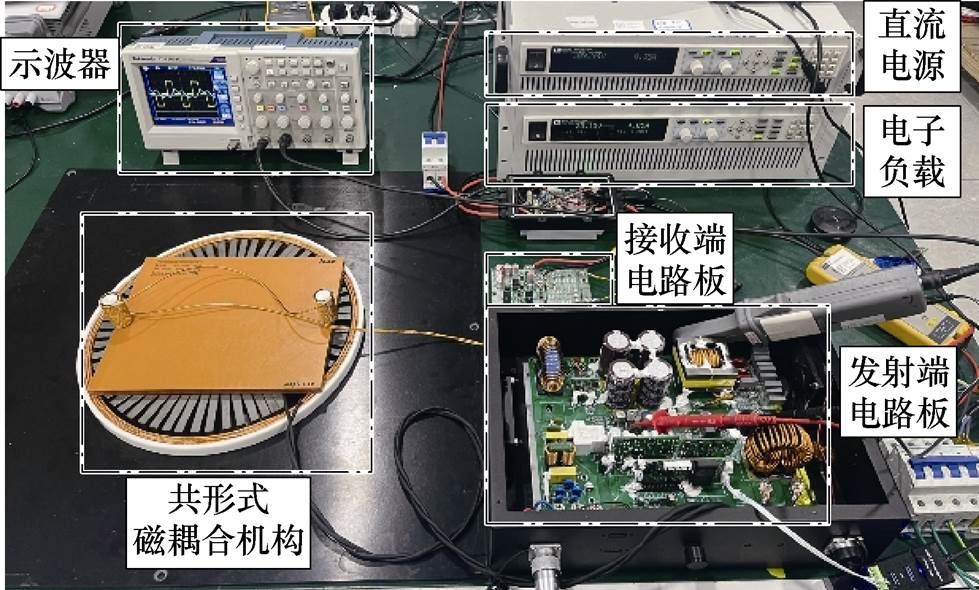
图20 系统实验样机
Fig.20 Prototype of the system
表4 实验样机参数
Tab.4 Parameters of the system experimental platform
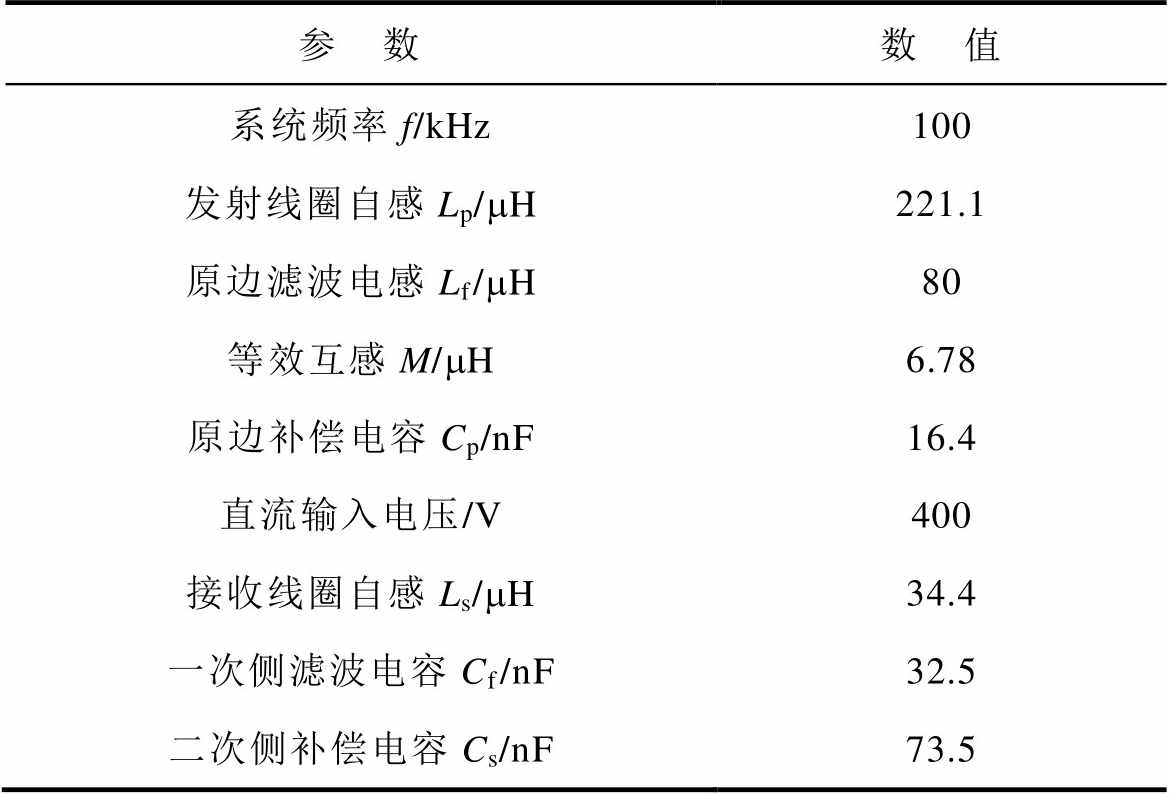
参 数数 值 系统频率f/kHz100 发射线圈自感Lp/mH221.1 原边滤波电感Lf/mH80 等效互感M/mH6.78 原边补偿电容Cp/nF16.4 直流输入电压/V400 接收线圈自感Ls/mH34.4 一次侧滤波电容Cf/nF32.5 二次侧补偿电容Cs/nF73.5
图21a为直流输入电压400 V,正对空载情况下系统逆变输出电压电流波形。图中,U1为逆变器的输出电压,I1为逆变器的输出电流,U2为系统直流输出电压,I2为系统直流输出电流。
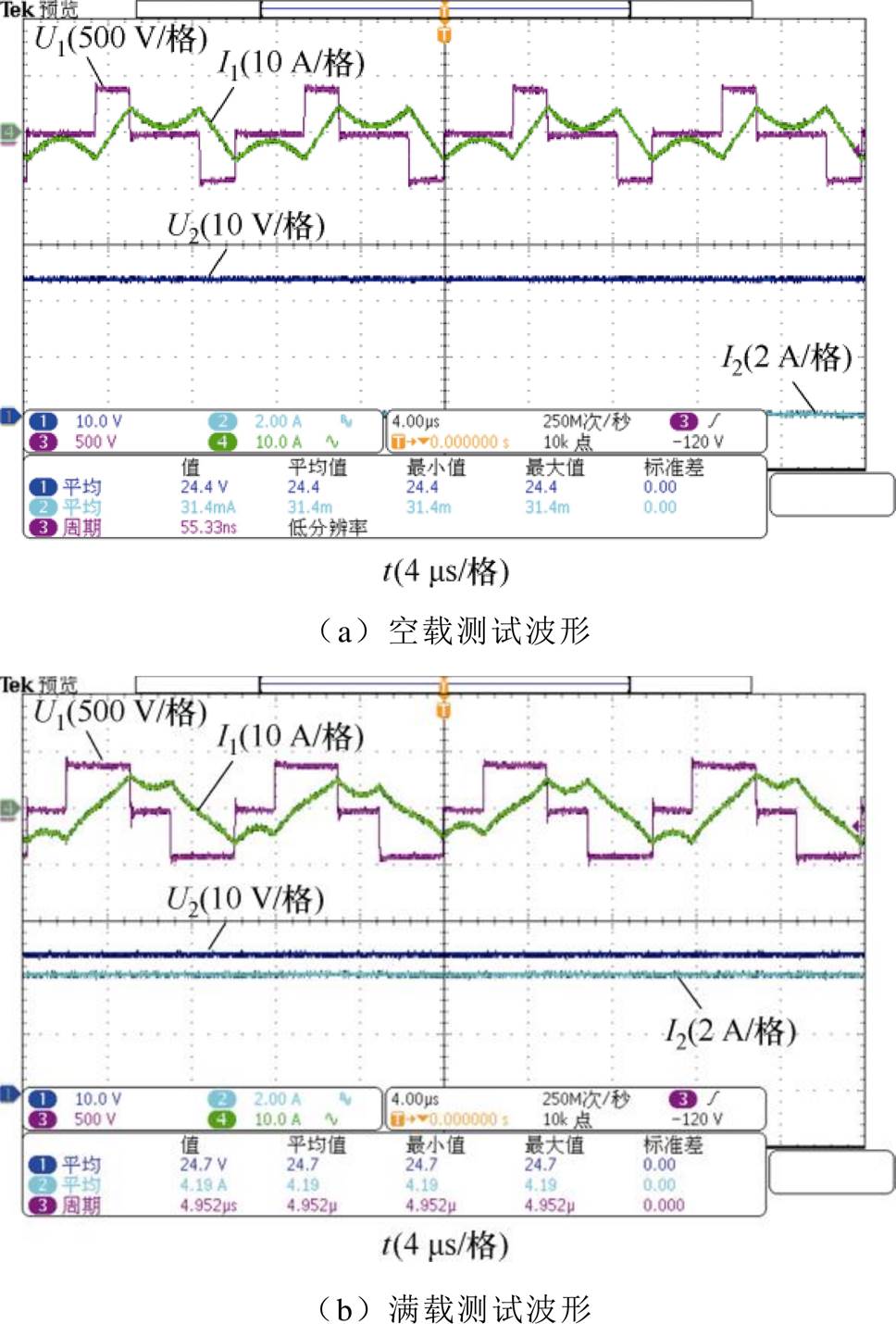
图21 系统空载和满载测试波形
Fig.21 No-load and full-load test waveforms
图21b为直流输入电压400 V、输出功率100 W左右时,正对系统逆变器的输出电压电流波形。满载时直流输出电压值为24.7 V,直流输出电流为4.1 A。系统在空载和满载时逆变输出电流均滞后于逆变输出电压,实现了在全功率段逆变开关管零电压软开关(Zero Voltage Switching, ZVS)开通。
在满载情况下,测试接收线圈分别在x轴、y轴及qR=45°方向上产生±20 mm水平偏移,系统的输出情况。测试结果如图22所示,实验结果显示在三个偏移方向上产生±20 mm偏移时,系统输出电压和输出功率比较稳定,输出电压稳定在(25.16±0.1) V;输出功率稳定在102 W。在x轴和qR=45°方向上产生±20 mm水平偏移时,效率变化较明显,效率最大为89.2%,最小为86.6%。
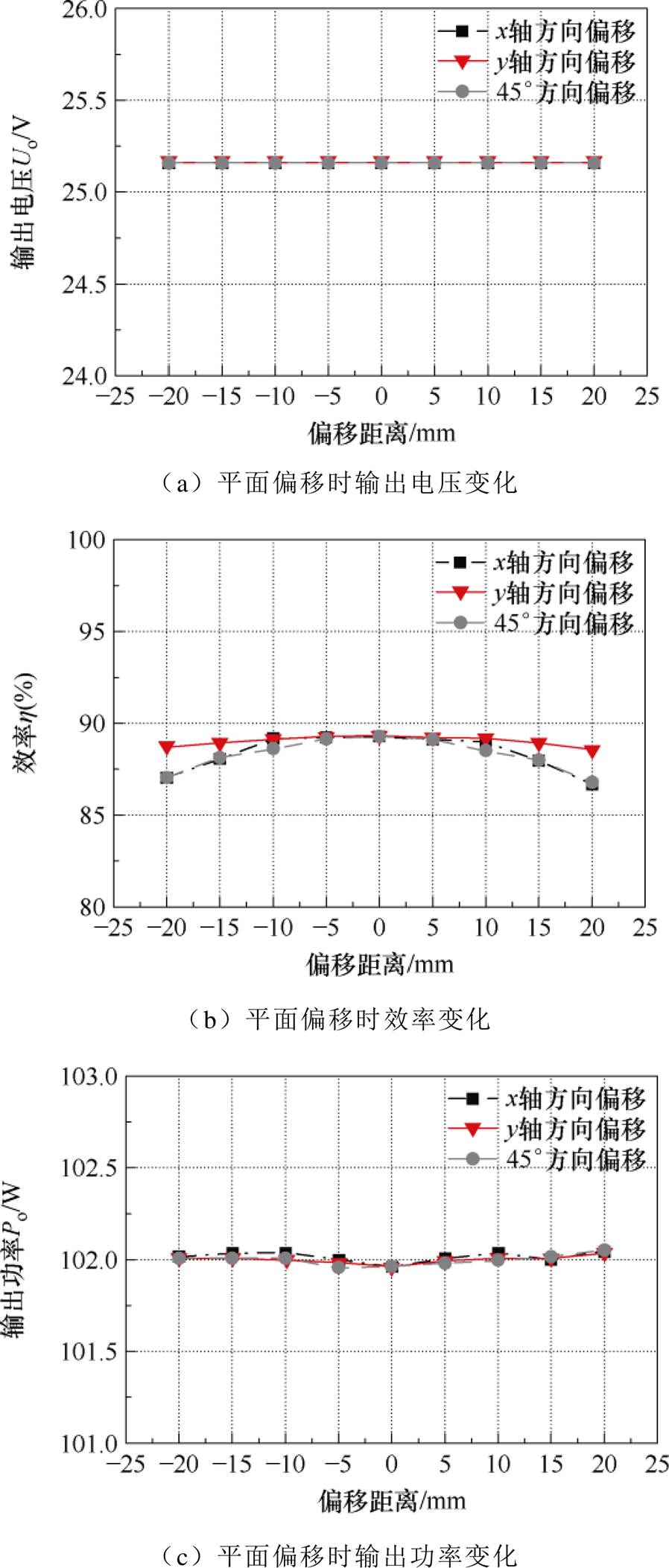
图22 系统平面偏移时输出测试
Fig.22 System output test with lateral misalignment
满载情况下,测试接收线圈分别在x轴、y轴及qR=45°方向上产生20 mm的偏移后,绕 旋转0°、60°、120°和180°时,系统的输出电压、效率和输出功率。测试结果如图23所示。可以看出,系统的输出电压和功率基本不随旋转偏移角度的变化而变化,输出电压维持在 (25.16±0.1) V,输出功率维持在102 W,系统最大效率为90.2%,最小效率为85%。在实验时一次侧采用400 V直流电压输入,接收端采用同步整流策略,用MOSFET代替整流二极管,发射端逆变器实现了ZVS,故效率最大值能够达到90.2%。当系统在x轴发生20 mm偏移且旋转30°时系统效率最低为85%,证明系统具有良好的旋转抗偏移性能,且旋转偏移角度偏移不影响系统传输效率。
旋转0°、60°、120°和180°时,系统的输出电压、效率和输出功率。测试结果如图23所示。可以看出,系统的输出电压和功率基本不随旋转偏移角度的变化而变化,输出电压维持在 (25.16±0.1) V,输出功率维持在102 W,系统最大效率为90.2%,最小效率为85%。在实验时一次侧采用400 V直流电压输入,接收端采用同步整流策略,用MOSFET代替整流二极管,发射端逆变器实现了ZVS,故效率最大值能够达到90.2%。当系统在x轴发生20 mm偏移且旋转30°时系统效率最低为85%,证明系统具有良好的旋转抗偏移性能,且旋转偏移角度偏移不影响系统传输效率。
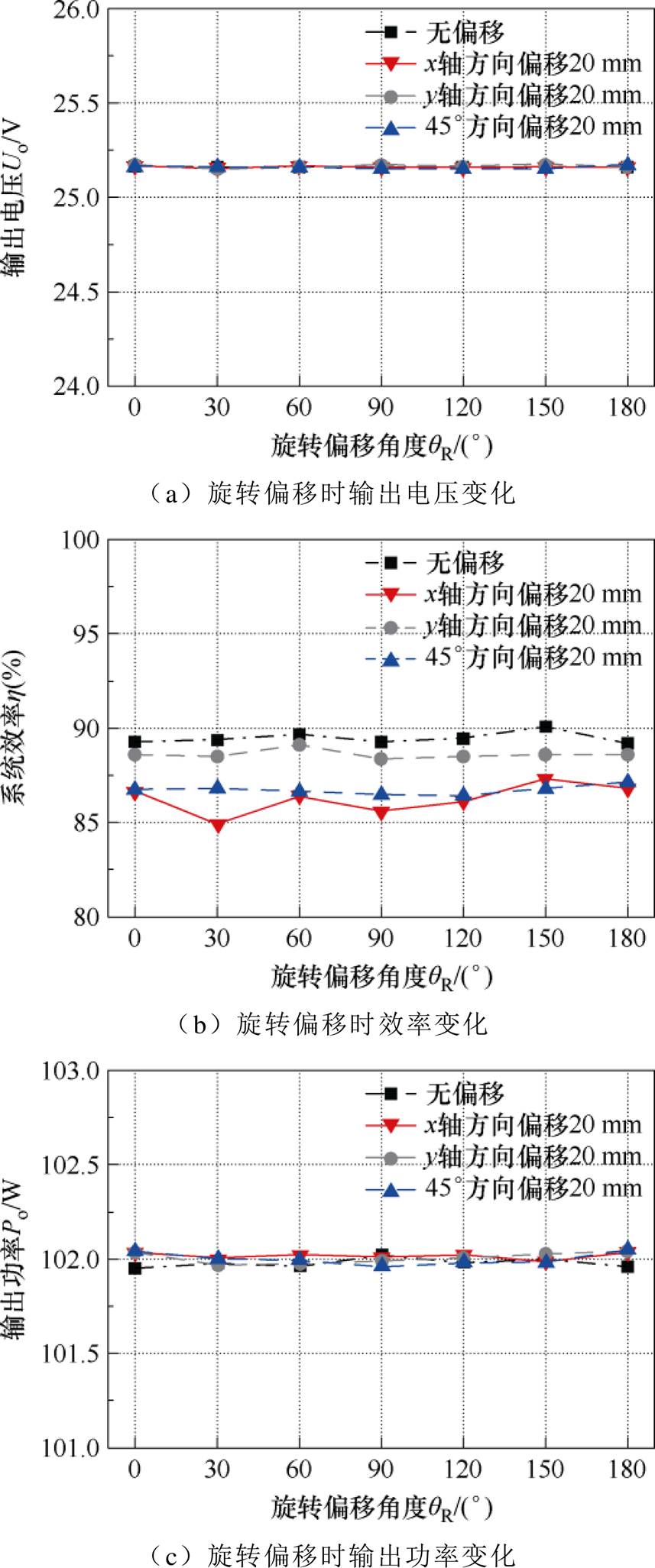
图23 系统旋转偏移时输出测试
Fig.23 System output test with rotation misalignment
本文提出一种具有强抗偏移性能的共形式磁耦合机构,与先前已发表文献对比结果见表5。
表5 与先前成果对比
Tab.5 Comparison with previous published
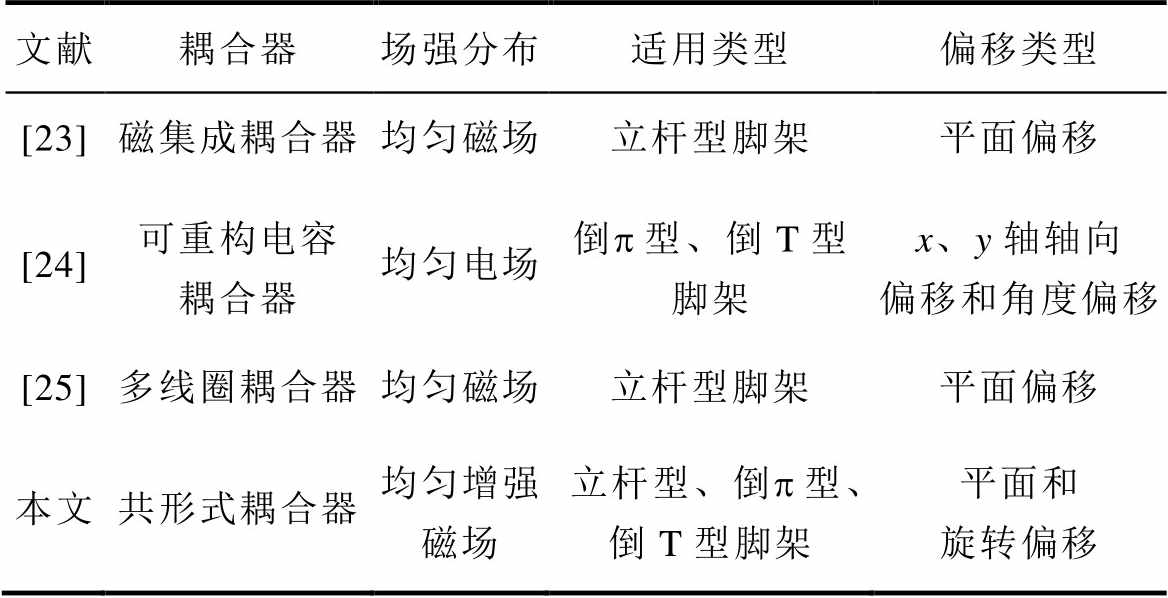
文献耦合器场强分布适用类型偏移类型 [23]磁集成耦合器均匀磁场立杆型脚架平面偏移 [24]可重构电容耦合器均匀电场倒p型、倒T型脚架x、y轴轴向偏移和角度偏移 [25]多线圈耦合器均匀磁场立杆型脚架平面偏移 本文共形式耦合器均匀增强磁场 立杆型、倒p型、倒T型脚架平面和旋转偏移
与文献[26-28]所发表的成果相比,本文所提出的共形式耦合机构能够产生均匀且环形增强式的磁场,提升了系统在平面和旋转方向的偏移容忍性,同时,本文所提出的磁耦合机构的接收端能够适用于立杆型、倒p型、倒T型脚架的无人机,提升了系统的共性化度,使系统能够适用于多类型无人机脚架。
本文提出了一种基于共形式磁耦合机构的全方向强抗偏移性强共形化度UAV-WPT系统,该系统耦合机构发射端由两个同轴螺线管反向绕制而成,能够在两个螺线管中间的区域产生增强式匀强磁场,提升了系统的水平和旋转抗偏移性能,接收端由两个竖直螺线管线圈同向组成,能够适应多数类目的无人机,实现了对多类目无人机耦合机构的共形化,提升了耦合机构对多种无人机种类的适配性,且不遮挡无人机云台。分析了系统的强抗偏移性和高共形化原理;并给出了耦合机构参数优化设计方法;基于共形式耦合机构,搭建了无线充电实验平台。实验结果表明,所设计的耦合机构具有较好的抗偏移性和较高的共形化度。该系统在±20 mm平面和60°、120°和180°旋转偏移下,电压能够维持在 (25.16±0.1) V,传输效率保持在85%~90.2%之间;在0°~20°倾斜角度下,互感最大变化值为未倾斜状态下互感值的1.046%(互感变化值/未倾斜状态互感值),展示出较好的抗偏移性能和强共形 化度。
参考文献
[1] Jyoti, Batth R S. Classification of unmanned aerial vehicles: a mirror review[C]//2020 International Con- ference on Intelligent Engineering and Management (ICIEM), London, UK, 2020: 408-413.
[2] Abdelmaksoud S I, Mailah M, Abdallah A M. Control strategies and novel techniques for autonomous rotorcraft unmanned aerial vehicles: a review[J]. IEEE Access, 2020, 8: 195142-195169.
[3] Xu Liangcai, Huangfu Yigeng, Ma Rui, et al. A comprehensive review on fuel cell UAV key tech- nologies: propulsion system, management strategy, and design procedure[J]. IEEE Transactions on Transportation Electrification, 2022, 8(4): 4118-4139.
[4] New W K, Leow C Y. Unmanned aerial vehicle (UAV) in future communication system[C]//2021 26th IEEE Asia-Pacific Conference on Communications (APCC), Kuala Lumpur, Malaysia, 2021: 217-222.
[5] Zuo Zongyu, Liu Cunjia, Han Qinglong, et al. Unmanned aerial vehicles: control methods and future challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(4): 601-614.
[6] Kumar N, Puthal D, Theocharides T, et al. Unmanned aerial vehicles in consumer applications: new appli- cations in current and future smart environments[J]. IEEE Consumer Electronics Magazine, 2019, 8(3): 66-67.
[7] 陈浩, 丘东元, 张波, 等. 植入式医疗设备无线供电技术综述[J]. 电源学报, 2025, 23(1): 188-199.
Chen Hao, Qiu Dongyuan, Zhang Bo, et al. Overview of wireless power transfer technology for implantable medical devices [J]. Journal of Power Supply, 2025, 23(1): 188-199.
[8] 陈伟华, 宋宇航, 闫孝姮, 等. 心脏起搏器无线电能传输LCC-LCC磁集成印刷螺旋线圈研究[J]. 电工技术学报, 2024, 39(17): 5289-5299.
Chen Weihua, Song Yuhang, Yan Xiaoheng, et al. Research on wireless power transmission for cardiac pacemakers using LCC-LCC magnetic integrated printed spiral coil[J]. Transactions of China Elec- trotechnical Society, 2024, 39(17): 5289-5299.
[9] 田勇, 冯华逸, 田劲东, 等. 电动汽车动态无线充电系统输出电流模型预测控制[J]. 电工技术学报, 2023, 38(9): 2310-2322, 2447.
Tian Yong, Feng Huayi, Tian Jindong, et al. Model predictive control for output current of electric vehicle dynamic wireless charging systems[J]. Transactions of China Electrotechnical Society, 2023, 38(9): 2310-2322, 2447.
[10] 徐先峰, 吴慧玲, 杨雄政, 等. 空间约束下电动汽车无线充电系统磁耦合结构优化[J]. 电工技术学报, 2024, 39(12): 3581-3588.
Xu Xianfeng, Wu Huiling, Yang Xiongzheng, et al. Optimization of magnetically coupled structure of wireless charging system for electric vehicles under space constraint[J]. Transactions of China Electro technical Society, 2024, 39(12): 3581-3588.
[11] 刘宇鑫, 高飞, 刘鑫, 等. 深海无人航行器双向无线充电系统的涡流损耗分析与效率优化[J]. 电工技术学报, 2024, 39(18): 5599-5609.
Liu Yuxin, Gao Fei, Liu Xin, et al. Analysis of eddy current loss and efficiency optimization for bidi- rectional underwater wireless power transfer of AUVs[J]. Transactions of China Electro technical Society, 2024, 39(18): 5599-5609.
[12] 张杰, 赵航, 许知博, 等. 基于磁耦合谐振式海下无线电能与信息共享耦合线圈分时传输方法[J]. 电源学报, 2023, 21(6): 74-83.
Zhang Jie, Zhao Hang, Xu Zhibo, et al. Time-sharing transmission method of undersea wireless power and information shared coupling coil based on magnetic coupling resonance[J]. Journal of Power Supply, 2023, 21(6): 74-83.
[13] 孙瀛, 周天, 宋凯, 等. 提升无线充电异物检测系统灵敏度的高阶复合谐振拓扑[J]. 电工技术学报, 2023, 38(6): 1541-1552.
Sun Ying, Zhou Tian, Song Kai, et al. Design of high-order composite resonant topology for improving the sensitivity of foreign object detection system[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1541-1552.
[14] 程时杰, 陈小良, 王军华, 等. 无线输电关键技术及其应用[J]. 电工技术学报, 2015, 30(19): 68-84.
Cheng Shijie, Chen Xiaoliang, Wang Junhua, et al. Key technologies and applications of wireless power transmission[J]. Transactions of China Electro- technical Society, 2015, 30(19): 68-84.
[15] 卿晓东, 苏玉刚. 电场耦合无线电能传输技术综述[J]. 电工技术学报, 2021, 36(17): 3649-3663.
Qing Xiaodong, Su Yugang. An overview of electric- filed coupling wireless power transfer technology[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3649-3663.
[16] 刘成, 许欣慰, 董硕, 等. 平面旋转机构监测器无线供电系统稳定性研究[J]. 电气传动, 2025, 55(2): 34-40.
Liu Cheng, Xu Xinwei, Dong Shuo, et al. Stability study of wireless power supply system for planar rotation mechanism monitor[J]. Electric Drive, 2025, 55(2): 34-40.
[17] 蒋金橙, 王佩月, 冯天旭, 等. 基于准双向三态协同调度的无人车和无人机逐级式无线充电应用[J]. 电工技术学报, 2024, 39(22): 6965-6979.
Jiang Jincheng, Wang Peiyue, Feng Tianxu, et al. AGV and UAV stepwise wireless charging appli- cation based on quasi bidirectional three-state collaborative progressive method[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(22): 6965- 6979.
[18] 程志远, 宋晓逸, 吴晓婷, 等. 无线充电系统旋转式电磁耦合器损耗计算及热点温度研究[J]. 电工技术学报, 2024, 39(7): 1932-1942, 1956.
Cheng Zhiyuan, Song Xiaoyi, Wu Xiaoting, et al. Loss calculation and hot spot temperature research of rotary electromagnetic coupler in wireless charging system[J]. Transactions of China Electrotechnical Society, 2024, 39(7): 1932-1942, 1956.
[19] 冯鸿运, 林飞, 杨中平, 等. 应用于自动导引小车无线充电系统的导航与供电一体化线圈研究[J]. 电工技术学报, 2024, 39(14): 4294-4304.
Feng Hongyun, Lin Fei, Yang Zhongping, et al. A research on a navigation and power supply integrated coil for automatic guided vehicle wireless power transfer system[J]. Transactions of China Electro- technical Society, 2024, 39(14): 4294-4304.
[20] Mou Xiaolin, Gladwin D, Jiang Jing, et al. Near-field wireless power transfer technology for unmanned aerial vehicles: a systematical review[J]. IEEE Journal of Emerging and Selected Topics in Industrial Electronics, 2023, 4(1): 147-158.
[21] Le A, Truong L, Quyen T, et al. Wireless power transfer near-field technologies for unmanned aerial vehicles (UAVs): a review[J]. EAI Endorsed Transa- ctions on Industrial Networks and Intelligent Systems, 2020, 7(22): 162831.
[22] Wu Shuai, Cai Chunwei, Liu Xichen, et al. Compact and free-positioning omnidirectional wireless power transfer system for unmanned aerial vehicle charging applications[J]. IEEE Transactions on Power Elec- tronics, 2022, 37(8): 8790-8794.
[23] Campi T, Cruciani S, Rodríguez G, et al. Coil design of a wireless power transfer charging system for a drone[C]//2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 2016: 1.
[24] Campi T, Cruciani S, Maradei F, et al. Wireless charging system integrated in a small unmanned aerial vehicle (UAV) with high tolerance to planar coil misalignment[C]//2019 Joint International Sym- posium on Electromagnetic Compatibility, Sapporo and Asia-Pacific International Symposium on Elec- tromagnetic Compatibility (EMC Sapporo/APEMC), Sapporo, Japan, 2019: 601-604.
[25] Cai Changsong, Wang Junhua, Nie Hui, et al. Effective-configuration WPT systems for drones charging area extension featuring quasi-uniform magnetic coupling[J]. IEEE Transactions on Trans- portation Electrification, 2020, 6(3): 920-934.
[26] Wang Junhua, Chen Ruixuan, Cai Changsong, et al. An onboard magnetic integration-based WPT system for UAV misalignment-tolerant charging with constant current output[J]. IEEE Transactions on Trans- portation Electrification, 2023, 9(1): 1973-1984.
[27] Cai Chunwei, Liu Xichen, Wu Shuai, et al. A misalignment tolerance and lightweight wireless charging system via reconfigurable capacitive coupling for unmanned aerial vehicle applications[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 22-26.
[28] Li Zhenjie, Li Xianzhen, Zhou Yuxuan, et al. Improving misalignment tolerance for the wireless charging system using multiple coils coupler[J]. IEEE Transactions on Power Electronics, 2024, 39(6): 7721-7735.
Abstract An unmanned aerial vehicle wireless power transfer (UAV-WPT) system is susceptible to planar and rotational misa02 during UAV landing, resulting in unstable charging. Moreover, existing couplers exhibit poor compatibility with UAV tripods, making it challenging to achieve a conformal design. This paper proposes an omnidirectional misalignment-tolerant UAV-WPT system based on a conformal coupler. The transmitter consists of two coaxially wound solenoid coils connected in series, while the receiver comprises two vertically oriented solenoid coils wound in the same direction and connected in series. This design enables the transmitting coil to generate a ring-shaped, enhanced, uniform magnetic field, significantly improving misalignment tolerance. Additionally, the receiver’s adaptability to various UAV tripod configurations enhances the system’s flexibility and conformability.
First, the architecture of an omnidirectional, highly misalignment-tolerant UAV-WPT system based on a conformal magnetic coupler is introduced. The system comprises a DC power supply, a full-bridge inverter, a transmitter resonant compensation network, transmitting coils, receiving coils, a receiver resonant compensation network, a synchronous rectifier filter circuit, a load, and a PID control unit. Next, a magnetic field model of the coupler is established using the Biot-Savart law. The magnetic field distribution and the underlying physical principle enabling high misalignment tolerance are analyzed. The theoretical analysis is validated through COMSOL simulations. Furthermore, a circuit model of the system is developed based on Kirchhoff's Voltage Law, followed by an in-depth evaluation of the system’s misalignment tolerance and coupler conformity. Finally, the impact of coupler parameters on system performance is examined. A structured design flowchart is provided along with the final optimized coupler parameters.
A COMSOL simulation model is developed. Simulation results indicate that the mutual inductance decreases by no more than 1.2 mH under ±20 mm misalignment along the x-axis, y-axis, and qR=45° radial directions. When the receiver shifts 20 mm along these directions and subsequently rotates from 0° to 180° around point , the mutual inductance variation remains within 0.3 mH. Additionally, when the receiver's tilt angle changes from 0° to 20°, the mutual inductance decreases by only 0.325 mH. An experimental platform is constructed. Experimental results demonstrate that the system maintains a stable output voltage of 25.16 V and achieves an efficiency of 86.6% under ±20 mm planar misalignment. Furthermore, with a rotational misalignment of 180°, the system continues to deliver a constant output voltage of 25.16 V, with efficiency ranging from 85% to 90.2%.
, the mutual inductance variation remains within 0.3 mH. Additionally, when the receiver's tilt angle changes from 0° to 20°, the mutual inductance decreases by only 0.325 mH. An experimental platform is constructed. Experimental results demonstrate that the system maintains a stable output voltage of 25.16 V and achieves an efficiency of 86.6% under ±20 mm planar misalignment. Furthermore, with a rotational misalignment of 180°, the system continues to deliver a constant output voltage of 25.16 V, with efficiency ranging from 85% to 90.2%.
Unlike existing designs, the proposed conformal coupler generates a uniform, annularly enhanced magnetic field, which significantly improves the system’s tolerance to planar and rotational misalignments. Moreover, the receiver of the proposed magnetic coupler is highly adaptable, accommodating UAVs equipped with pole-type, inverted-p, and inverted-T tripods. This enhanced compatibility broadens the system’s applicability, making it suitable for various UAV tripod configurations.
keywords:Unmanned aerial vehicle, wireless power transfer, conformal coupler, misalignment tolerance
DOI: 10.19595/j.cnki.1000-6753.tces.242149
中图分类号:TM724
中央高校基本科研业务费专项资金资助项目(2022CDJHLW010)。
收稿日期 2024-11-29
改稿日期 2025-02-12
左志平 男,1989年生,副教授,博士生导师,研究方向为无线电能传输技术。E-mail: zpzuo@cqu.edu.cn
李英杰 男,1997年生,博士研究生,研究方向为无线电能传输技术。E-mail: 20221301006@stu.cqu.edu.cn(通信作者)
(编辑 陈 诚)