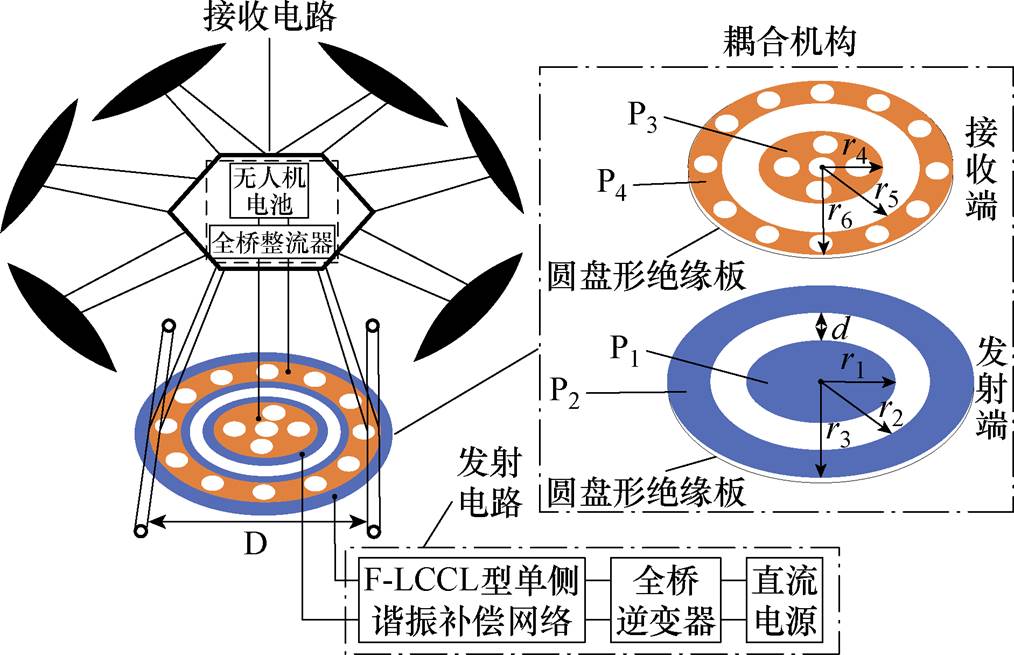
图1 无人机无线电能传输系统结构
Fig.1 Structure of the UAV wireless energy transmission system
摘要 由于目前无人机WPT系统中存在耦合机构机载端质量大、体积大、抗偏能力差以及电磁干扰大的问题,该文提出一种轻量化抗偏无线输电耦合机构和一种基于F-LCCL型单侧谐振补偿网络的无人机WPT系统。首先,分析了无人机对于耦合机构的设计需求,提出一种具备轻量化和抗偏特性的电场耦合机构设计思路,从结构设计、电场分布和抗偏能力三方面展开分析。然后,设计F-LCCL型单侧谐振补偿网络,对系统进行理论建模及输出特性分析,并基于该谐振补偿网络设计无人机无线电能传输系统。最后,搭建仿真及实验平台,对系统的无线电能传输能力、抗偏特性和输出特性三个方面进行仿真分析和实验验证。结果表明,所提方案机载侧具备较强的轻量化抗偏水平,且在一定负载变化范围内具备变负载恒压输出特性。
关键词:无人机 无线电能传输 耦合机构 轻量化 抗偏
近年来,民用无人机市场发展较快[1],无人机被广泛应用于电力巡检、交通监控、消防救援、农业植保、环境测绘和基建巡检等领域[2-4]。然而,目前无人机应用面临的主要挑战是电池容量受限[5],无法满足无人机长续航需求。目前增强无人机续航能力的方法主要有两种:搭载更大容量的电池或者在中途进行补电。首先,由于目前相对成熟的蓄电池技术很难取得较大突破,更大容量的电池就意味着更大的体积和质量[6],这会严重影响无人机的轻量化水平和机动性能。其次,中途补电目前主要采用的是人工手动插拔式充电,这种充电方式自动化程度低,且存在线缆老化、漏电等安全隐患。
无线电能传输(Wireless Power Transfer, WPT)技术的出现给无人机提供了一种新的供能方式,引起了诸多研究团队和学者的关注[7-10]。文献[11]提出一种双Q型磁耦合线圈结构,具有较强的抗偏能力,但体积大、质量重,还会造成较大的电磁干扰。文献[12]提出一种正交磁耦合机构,减轻了耦合机构接收端质量,但抗偏移能力较差。文献[13]提出一种双三维发射线圈结构,能实现无人机全向动态无线充电,但系统工作时漏磁场较大,会产生较大的电磁干扰。文献[14]提出一种十字形耦合机构,有效抑制了发射线圈上方145 mm高度范围内的磁场,减小了电磁干扰作用范围,但是仅适用于单一固定起落架无人机,结构通用性较差。
由于电场耦合式无线电能传输技术具有以下优势[15-17]:①耦合机构金属极板质量轻、成本低、制作简易且柔韧性好;②系统工作时,不会引起涡流损耗,电场分布集中,对周围造成的电磁干扰小。因此,有研究团队尝试将电场耦合式WPT技术应用于无人机领域。文献[18]提出一种安装于机腿下方的平板式电场耦合机构,但其等效耦合电容较小,样机系统的无线电能传输能力较弱。文献[19]提出一种分离式圆形电场耦合机构,有效削弱了异侧金属极板之间的交叉耦合,但严重占用机腹空间,系统工作时产生的漏电场还可能会对机身设备产生不良影响。文献[20]提出一种嵌套在无人机起落架上的电场耦合机构,虽然质量轻、不占用机腹空间,但结构通用性较差,难以实现360°角度抗偏。
本文针对以上问题,提出一种轻量化抗偏耦合机构的设计思路和一种基于F-LCCL型单侧谐振补偿网络的无人机无线电能传输系统。本方案将耦合机构安装于无人机起落架底部,发射端采用“圆盘圆环复合式”金属极板,接收端采用“均匀钻孔圆盘圆环复合式”金属箔,具有较强的轻量化水平、抗偏能力和结构通用性。通过谐振补偿网络的特殊设计,使得该系统在一定负载变化范围内具备变负载恒压输出特性。
无人机这一特殊应用对象对电场耦合机构的质量、形态、体积和抗偏特性等方面提出了严格的要求,无人机无线电能传输系统对电场耦合机构的具体需求可总结为如下三方面:
(1)无人机载重十分敏感,要求机载端要质量轻、体积小。由于金属极板的电荷密度分布具有明显的边缘效应[21],将机载端金属极板设置为金属箔,并均匀钻孔充分利用该特性,提高金属极板的耦合利用率,进一步提高耦合机构机载侧的轻量化水平。
(2)无人机类型多样,起落架形状各异,这就要求耦合机构具备较强的通用性。由于无人机起落架距离机身较远,没有重要电力电子器件,可以将耦合机构机载端安装在起落架底部,系统工作时的漏电场不会对机身设备产生影响。
(3)无人机在降落时难以实现精准姿态和位置控制,因此需要耦合机构具备较强的位移和角度抗偏能力。结合目前无人机自主降落精度水平[22-23],针对无人机飞行路线固定且充电平台固定的应用场景,本系统抗偏方面的设计要求为需要具备±35 mm范围内的横向抗偏和360°角度抗偏能力。
结合上述无人机对耦合机构的设计需求分析,本文设计了如图1所示的电场耦合机构。发射端为“圆盘圆环复合式”金属极板,贴附在圆盘形绝缘板上方,接收端为“均匀钻孔圆盘圆环复合式”金属箔,贴附在轻薄圆盘形绝缘板下方,且耦合机构发射端与接收端呈现“大对小”的形态,耦合机构金属极板的材料可采用铜、铝或其他金属材料。
本文提出的电场耦合机构具备以下三方面优势:①接收端金属极板采用金属箔制成,且经过钻孔处理,质量轻、易安装,极大地提高了金属极板的耦合利用率。②能实现360°角度抗偏以及一定范围内的横向抗偏,有效提升了耦合机构的综合抗偏能力。③安装于起落架底部,距离机身较远,不会对机身及机腹的功能设备产生影响,结构通用性较强,能适用于不同起落架类型的无人机上。
图1 无人机无线电能传输系统结构
Fig.1 Structure of the UAV wireless energy transmission system
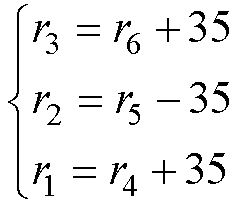
发射端与接收端金属极板的相对大小决定了耦合机构的抗偏性能,同时也决定着耦合电场的作用空间范围。增大发射端金属极板的面积,意味着增大耦合机构的横向可偏移范围,但同时也会增大发射端自耦合对系统传输效率的影响。本文耦合机构的横向抗偏移范围设计为±35 mm,故耦合机构的结构参数须满足
 (1)
(1)
考虑到同侧金属极板之间存在自耦合现象,异侧金属极板之间存在交叉耦合现象,自耦合和交叉耦合均会造成系统的传输效率降低。为确保在金属极板弱自耦合和弱交叉耦合的前提下,实现耦合机构横向抗偏移范围最大化,基于COMSOL Multiphysics对该电场耦合机构进行有限元电磁仿真,分析了发射端两金属极板间距d对发射端自耦合电容的影响规律,如图2所示。
当发射端两极板间距d<20 mm时,自耦合电容会随着极板间距的减小而急剧增大,因此,在保证耦合机构抗偏性能的基础上,为尽可能减少金属极板之间的自耦合和交叉耦合现象,将发射端内圆盘金属极板和发射端外圆环金属极板之间的间距d设置为20 mm。根据发射端与接收端金属极板正对耦合面积等面积划分原则并结合实际应用经验,设计了一组电场耦合机构结构参数,见表1。
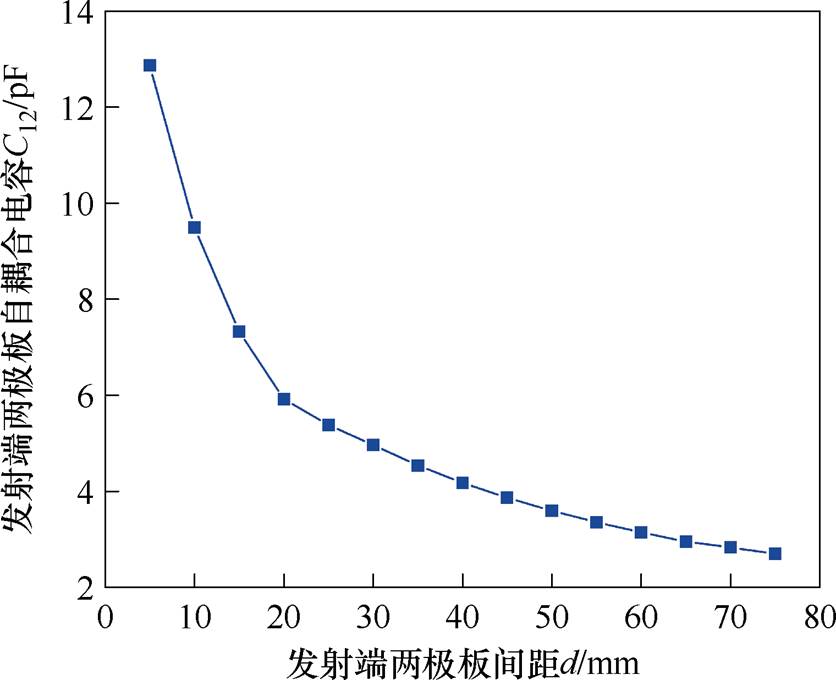
图2 发射端两极板间距对发射端自耦合电容的影响
Fig.2 Effect of emitter bipolar plate spacing on emitter self-coupling capacitance
表1 电场耦合机构结构参数
Tab.1 Structural parameters of electric field coupling mechanism
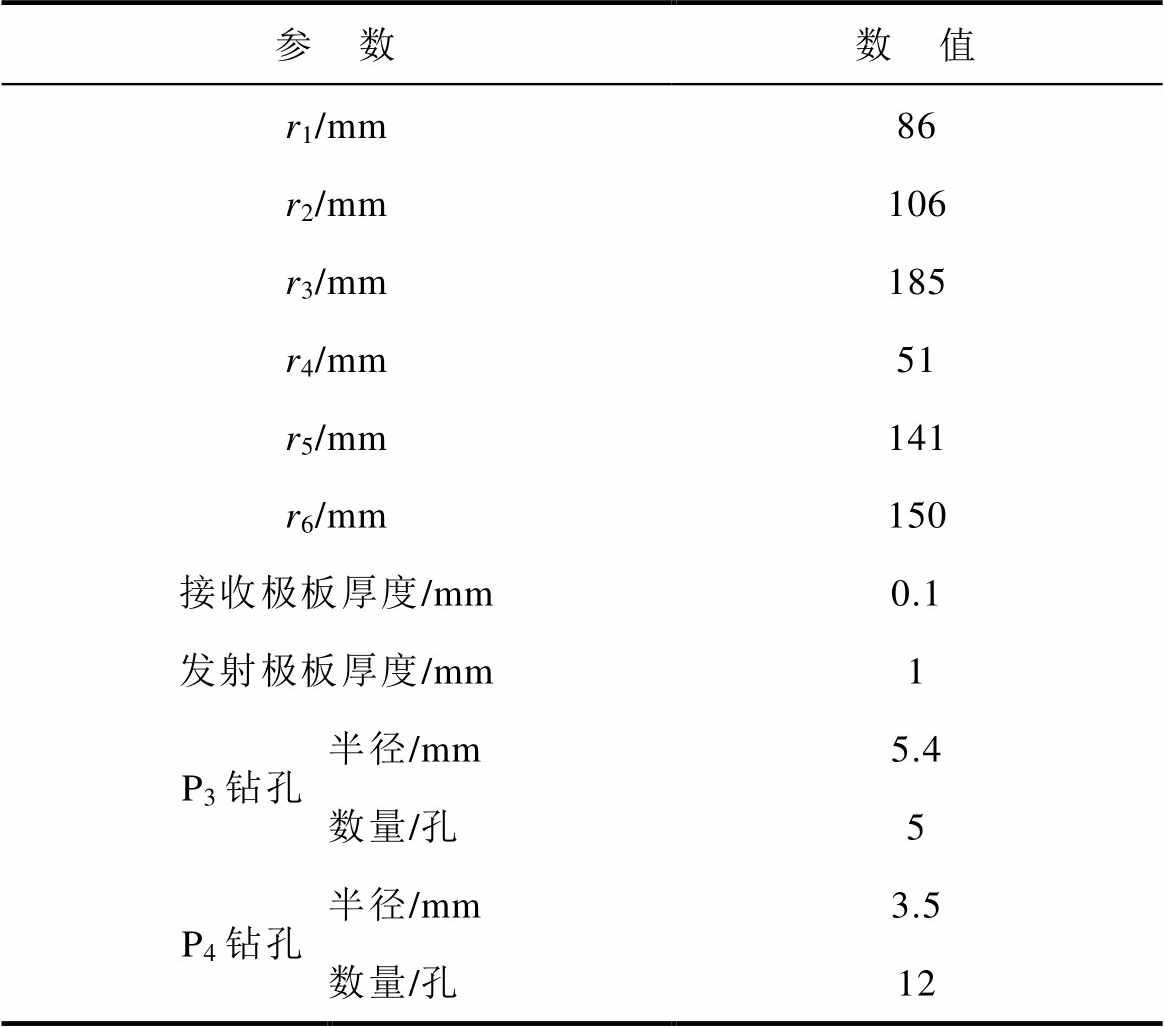
参 数数 值 r1/mm86 r2/mm106 r3/mm185 r4/mm51 r5/mm141 r6/mm150 接收极板厚度/mm0.1 发射极板厚度/mm1 P3钻孔半径/mm5.4 数量/孔5 P4钻孔半径/mm3.5 数量/孔12
为了进一步阐述所提出的电场耦合机构在系统工作时的耦合关系和耦合电场分布情况,绘制了该电场耦合机构不同金属极板之间的耦合关系如图3所示。
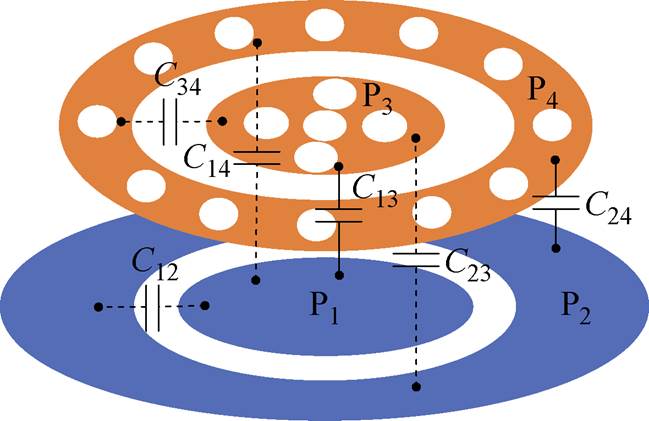
图3 耦合机构不同金属极板的耦合关系
Fig.3 Coupling mechanism of different metal pole plate coupling relationship diagram
结合图3中不同金属极板之间的耦合关系,在有限元仿真软件COMSOL Multiphysics中搭建本文电场耦合机构的三维仿真模型,进行有限元电磁仿真分析,获得的该电场耦合机构的耦合电场切面图如图4所示,不同位移偏移下耦合漏电场切面图如图5所示。发射端金属极板和接收端金属极板之间可以形成有效耦合电场,自耦合和交叉耦合现象较弱,耦合电场大部分分布在发射端和接收端金属极板之间,周围的漏电场作用范围较小,且距离无人机机身较远,保证了无人机及机腹下功能设备的安全运行。
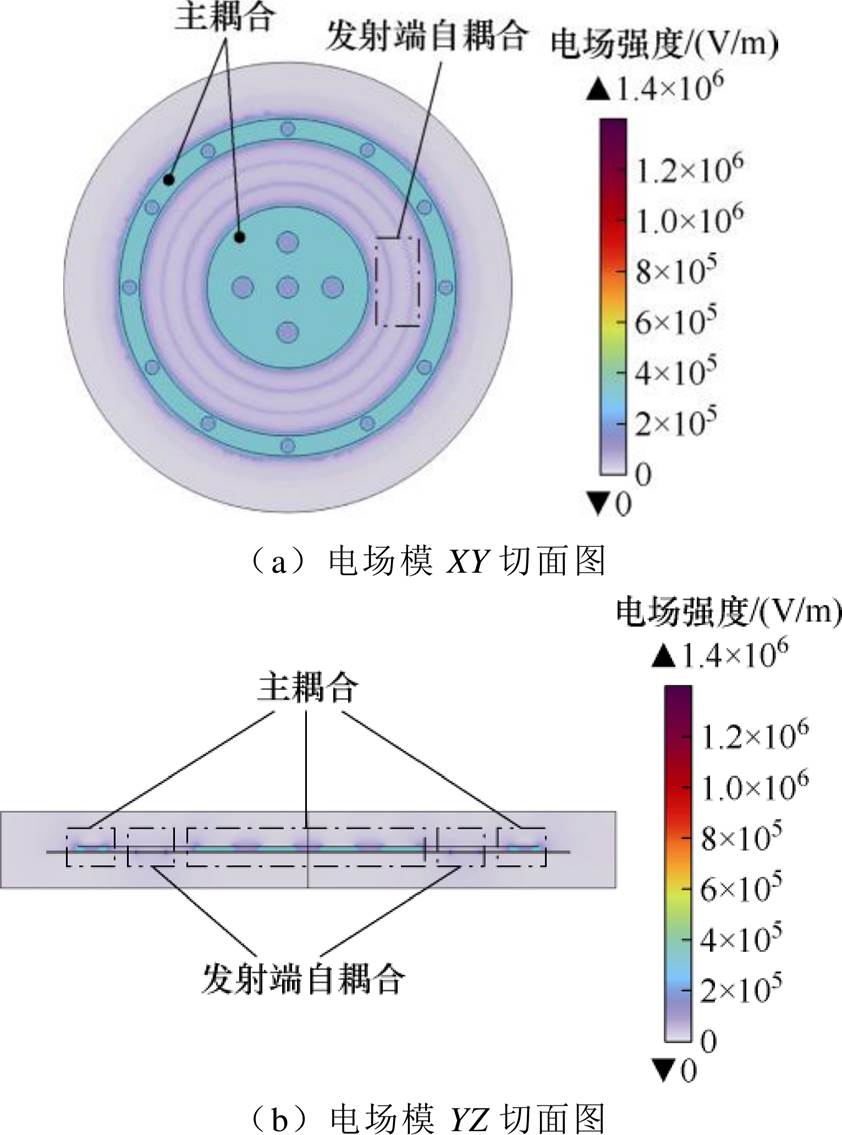
图4 耦合电场切面图
Fig.4 Coupled electric field cross-section
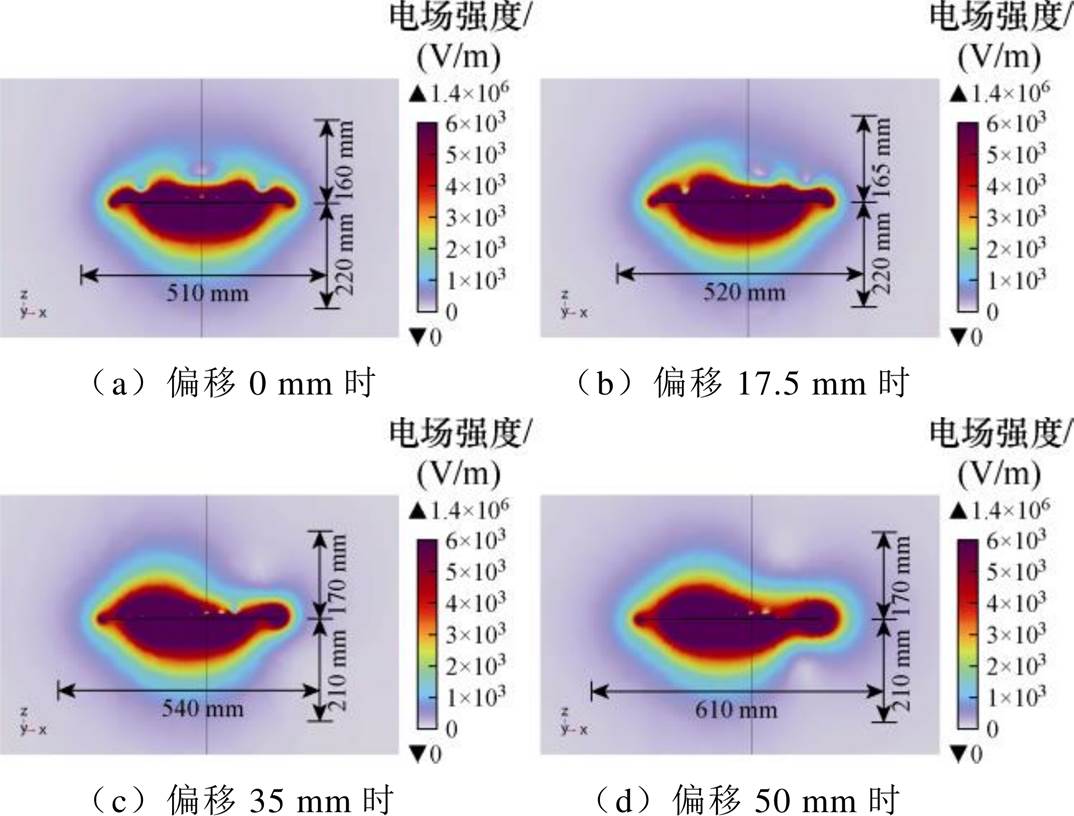
图5 不同位移偏移下耦合漏电场XZ切面图
Fig.5 XZ section of coupled leakage field at different displacement offsets
如图5所示,随着耦合机构接收极板沿X轴方向偏移距离的增大,该耦合机构的耦合漏电场X轴方向作用空间范围明显变大,Z轴方向作用空间范围小幅变大。但即使在最大偏移情况下,耦合机构发射极板上方170 mm处漏电场的电场强度也已经极小,该位置与无人机机身机腹仍保持有一定的安全距离,这保证了无人机及机载设备的安全运行。另外,为避免影响到系统供电电源的正常工作,可参考图5耦合漏电场作用空间范围,将系统供电电源放置于耦合机构漏电场作用范围的安全距离外。
电场耦合机构的耦合电容是重要的电参数,同时也是决定无人机无线电能传输系统电能传输能力和抗偏能力的关键因素。利用COMSOL Multiphysics有限元仿真软件对该耦合机构在不同偏移情况下的耦合电容进行有限元电磁仿真分析。
由于该电场耦合机构发生X轴、Y轴或其他方向的横向偏移情况一致,故以X轴横向偏移为例进行分析,当该电场耦合机构的机载端在发生横向偏移过程中,耦合机构横向偏移情况标识如图6所示,各耦合电容的变化规律如图7a所示。该耦合机构的交叉耦合电容和自耦合电容数值远低于耦合机构的主耦合电容,故忽略不计,该耦合机构的两个并联主耦合电容可以等效为一个耦合电容Cp[26],即Cp= C13C24/(C13+C24)。耦合电容在±35 mm的横向偏移范围内基本保持恒定,当横向偏移距离大于35mm时,主耦合电容快速下降,这是因为接收端与发射端金属极板的极板正对面积急剧减小。
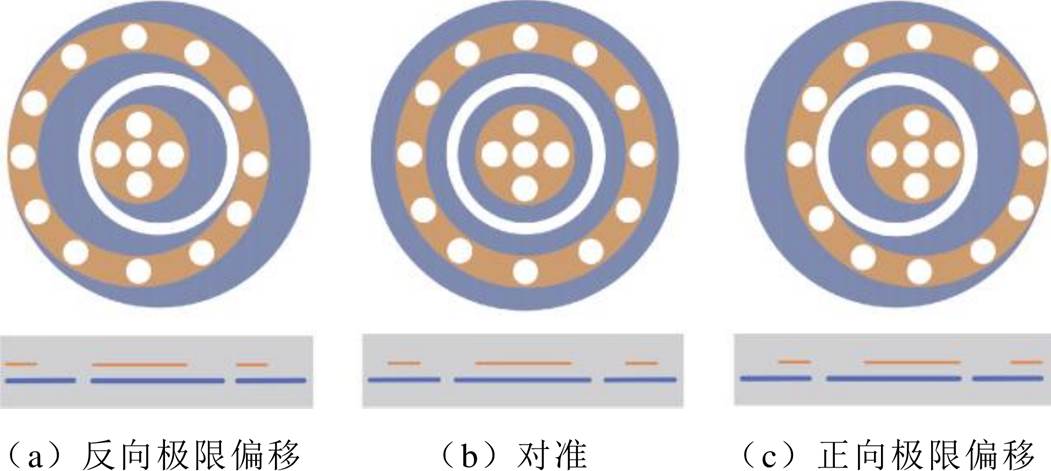
图6 耦合机构横向偏移情况标识
Fig.6 Identification of the lateral offset of the coupling mechanism
当耦合机构的接收端金属极板在发生360°角度偏移过程中,由于该电场耦合机构采用“圆盘圆环复合式”特殊结构设计,其等效耦合电容基本保持恒定,该耦合机构在发生角度偏移过程中各耦合电容的变化情况如图7b所示。
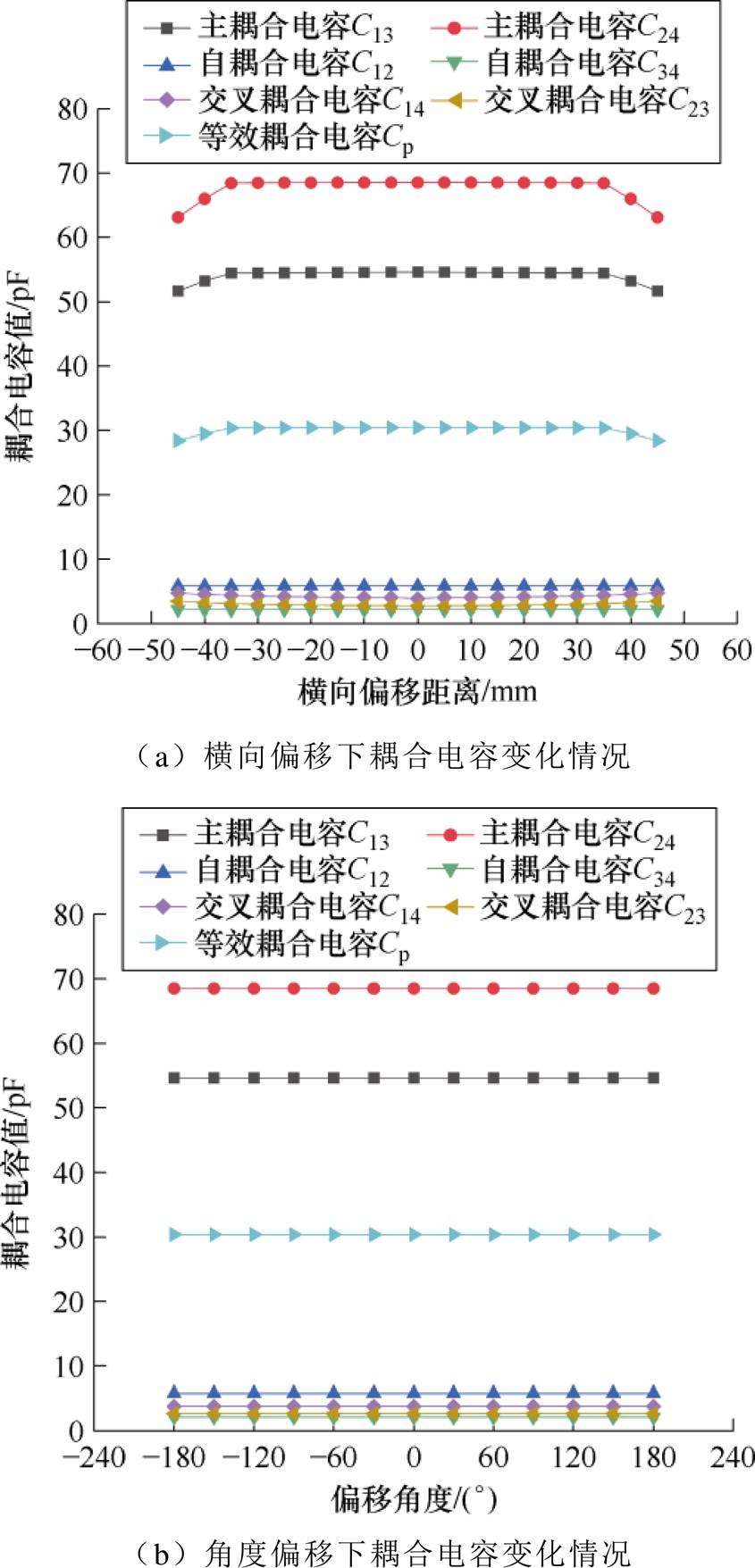
图7 耦合电容变化情况
Fig.7 Variation of coupling capacitance
为了实现机载侧的轻量化以及对无人机电池高效稳定的无线供电,设计了F-LCCL型单侧谐振补偿网络及其构成的系统电路,该系统由直流电源EDC、全桥逆变器(由S1~S4四个MOSFET组成)、F-LCCL型单侧谐振补偿网络、全桥整流器(由VD1~VD4四个二极管组成)和无人机电池负载组成。该系统采用如图1所示的电场耦合机构及系统结构,系统电路原理如图8所示。
全桥逆变器将系统原边直流输入逆变为高频激励源,F-LCCL型单侧谐振补偿网络将输入极板的电压升高到更高的电压等级,提高系统的功率传输能力,降低极板损耗,补偿系统的无功损耗。发射端金属极板电连接到谐振补偿网络的输出端,系统工作时,在耦合机构的发射端金属极板与接收端金属极板之间产生高频交变电场,进而在金属极板上产生位移电流,再经过机载侧的整流滤波,完成对无人机电池负载的供电。另外,该谐振补偿网络设置于系统原边,在无人机侧无任何无功补偿元件,能够在谐振补偿网络方面,最大限度地实现无人机侧的轻量化。
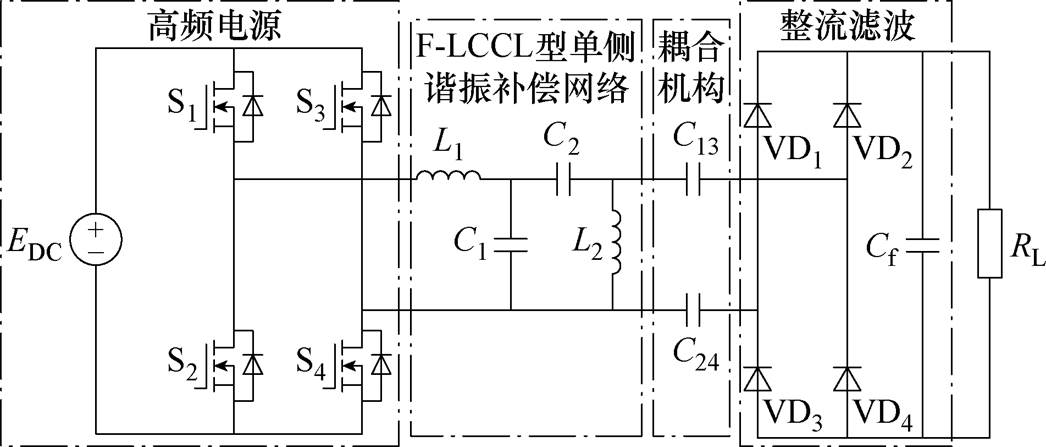
图8 无人机无线电能传输系统电路原理图
Fig.8 Circuit schematic diagram of wireless energy transmission system for unmanned aerial vehicle
考虑到谐振补偿网络本身具有良好的带通滤波作用,故而可以认为本系统在对无人机电池负载进行无线电能传输的过程中主要是由基波起作用。根据傅里叶分解法,全桥逆变器的输出电压 [24]可以表示为
[24]可以表示为
 (2)
(2)
系统机载侧整流前的等效阻抗Req[25]为
 (3)
(3)
电场耦合机构的两个并联主耦合电容可以等效为一个耦合电容Cp[26],即Cp=C13C24/(C13+C24),无人机无线电能传输系统的等效电路如图9所示。
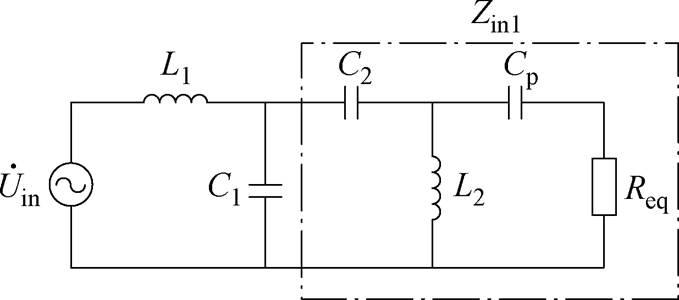
图9 系统等效电路
Fig.9 System equivalent circuit diagram
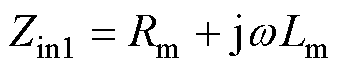
根据等效电路法,无人机无线电能传输系统等效电路的Zin1网络可以等效为一个电感Lm与一个电阻Rm串联网络,从而系统电路可以等效为一个T-LCL网络,如图10所示。忽略电路中电感和电容等无功元件的损耗,根据电路原理可计算出无人机无线电能传输系统Zin1网络的输入阻抗为
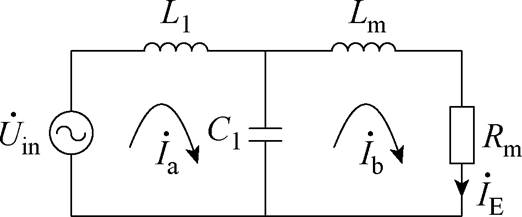
图10 系统等效T-LCL电路
Fig.10 System equivalent T-LCL circuit diagram
 (4)
(4)
其中
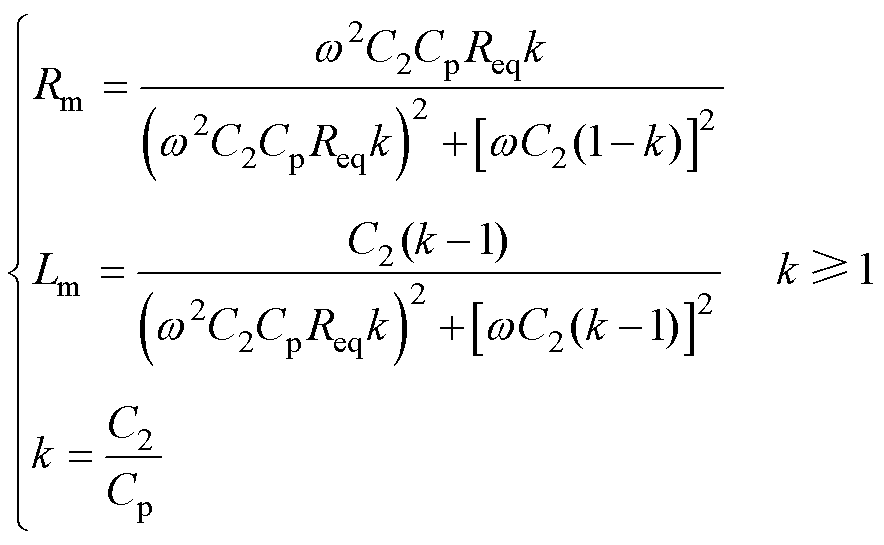
式中, 为系统工作角频率。
为系统工作角频率。
对等效后的T-LCL网络列写KVL方程为
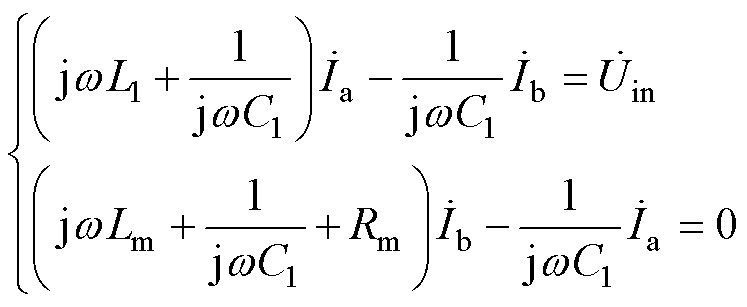 (5)
(5)
当满足谐振关系L1=Lm=1/(w2C1)时,可求得系统等效恒压源输入T-LCL网络电流增益G1和系统等效输入电阻Z1为
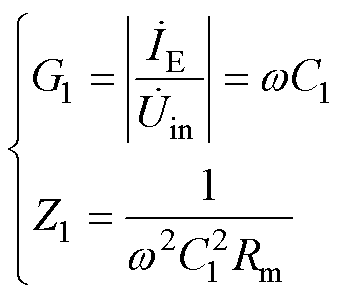 (6)
(6)
由式(6)可知,在恒压输入的条件下,系统的输出电流 仅与原边输入电压、谐振电容C1和谐振角频率w 有关,与电池负载无关。故该系统等效T-LCL网络具有恒压输入恒流输出特性,且系统等效输入电阻为纯电阻,系统工作在零相角输入状态,因此系统具有较高的功率因数与传输效率。
仅与原边输入电压、谐振电容C1和谐振角频率w 有关,与电池负载无关。故该系统等效T-LCL网络具有恒压输入恒流输出特性,且系统等效输入电阻为纯电阻,系统工作在零相角输入状态,因此系统具有较高的功率因数与传输效率。
根据上述系统理论建模分析,无人机无线电能传输系统等效电路的Zin1网络可以等效为一个恒流源输入的T-CLC网络,如图11所示。
对恒流源输入的T-CLC网络列写KVL方程为
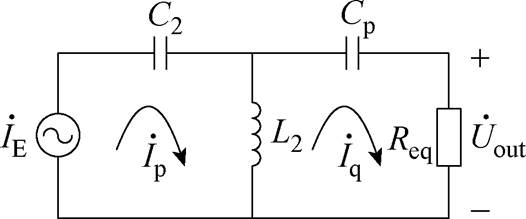
图11 恒流源输入的T-CLC电路
Fig.11 T-CLC circuit diagram for constant current source input
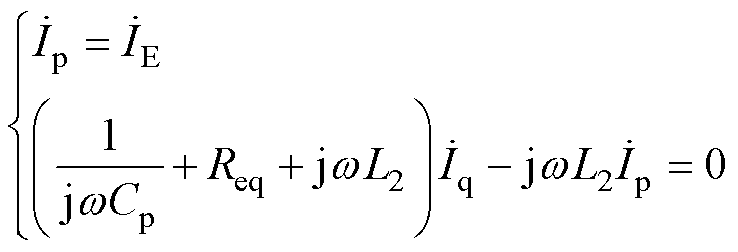 (7)
(7)
当满足谐振关系L2=1/(w2Cp)时,可求得该T-CLC网络电压增益G2为
 (8)
(8)
由式(6)和式(8)可计算出该无人机无线电能传输系统输出电压增益G3为
 (9)
(9)
由式(9)可知,该系统的输出电压 仅和输入电压、谐振电容C1和电场耦合机构的等效耦合电容Cp有关,与负载大小无关。输入电压和谐振电容C1为恒定参数,而该电场耦合机构的接收端在发生360°角度偏移和[-35 mm, 35 mm]范围内横向偏移时,接收端仍能全部处于有效耦合区域内,等效耦合电容Cp几乎不变,故该系统在可控偏移范围内具备变负载恒压输出特性。
仅和输入电压、谐振电容C1和电场耦合机构的等效耦合电容Cp有关,与负载大小无关。输入电压和谐振电容C1为恒定参数,而该电场耦合机构的接收端在发生360°角度偏移和[-35 mm, 35 mm]范围内横向偏移时,接收端仍能全部处于有效耦合区域内,等效耦合电容Cp几乎不变,故该系统在可控偏移范围内具备变负载恒压输出特性。
为了验证所设计的电场耦合机构的抗偏特性以及该无人机WPT系统的电能传输能力和输出特性,基于图8所示的系统电路原理,在Matlab/Simulink软件中搭建了该系统的仿真电路。
电场耦合式无线电能传输系统的工作频率一般在1~1.5 MHz范围内[27],由于过高的系统工作频率不仅会增加系统的控制难度,还会造成对周围的电磁干扰变大、鲁棒性降低、系统损耗变大等问题,因此在这里将系统的工作频率f设置为1 MHz。以大疆TB65智能飞行电池为例,其标称电压为44.76 V,以输出功率需求60 W为例设计了系统仿真验证电路。在其他实际应用中,可根据不同应用场景的功率输出需求来调整系统电源的输入功率,进而实现系统传输功率的提升或者降低。该系统仿真主要电路参数见表2。为简化计算,在这里取参数k=1,电容比C1/Cp=1。
表2 系统仿真主要电路参数表
Tab.2 System simulation main circuit parameter table
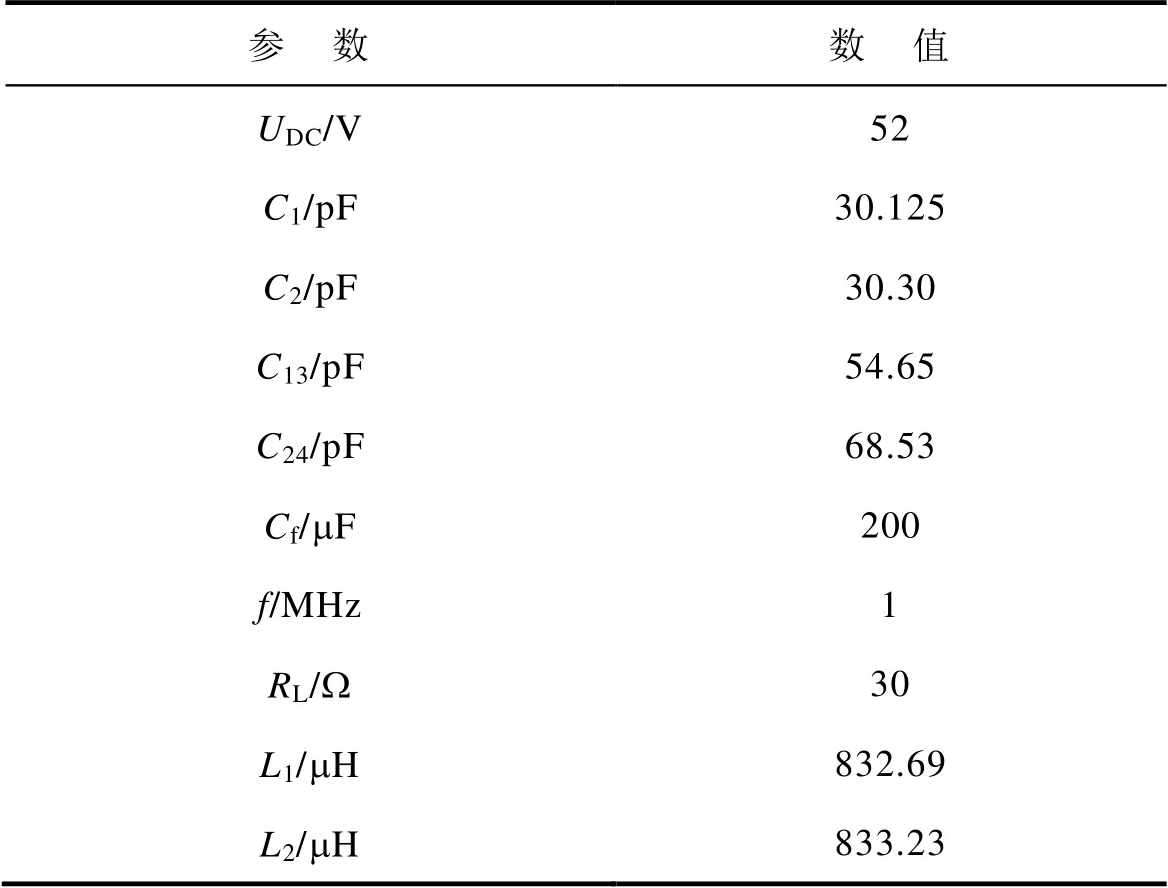
参 数数 值 UDC/V52 C1/pF30.125 C2/pF30.30 C13/pF54.65 C24/pF68.53 Cf/mF200 f/MHz1 RL/W30 L1/mH832.69 L2/mH833.23
本文所设计的无人机WPT系统,在耦合机构的发射端和接收端未发生相对偏移时,系统运行工作过程中仿真波形如图12所示,图12a为全桥逆变器的输出电压和输出电流的仿真波形,系统全桥逆变器输出电压的相位稍超前于输出电流的相位,这对系统的软开关运行起到一定的积极作用。图12b为全桥整流器输入侧电压和电流仿真波形,图12c为对无人机电池负载的输入电压和输入电流仿真波形。在耦合机构的发射端和接收端未发生相对偏移时,系统的输入功率为80 W,负载侧的输出电压为46.55 V,输出功率为72.23 W,传输效率为90.3%。
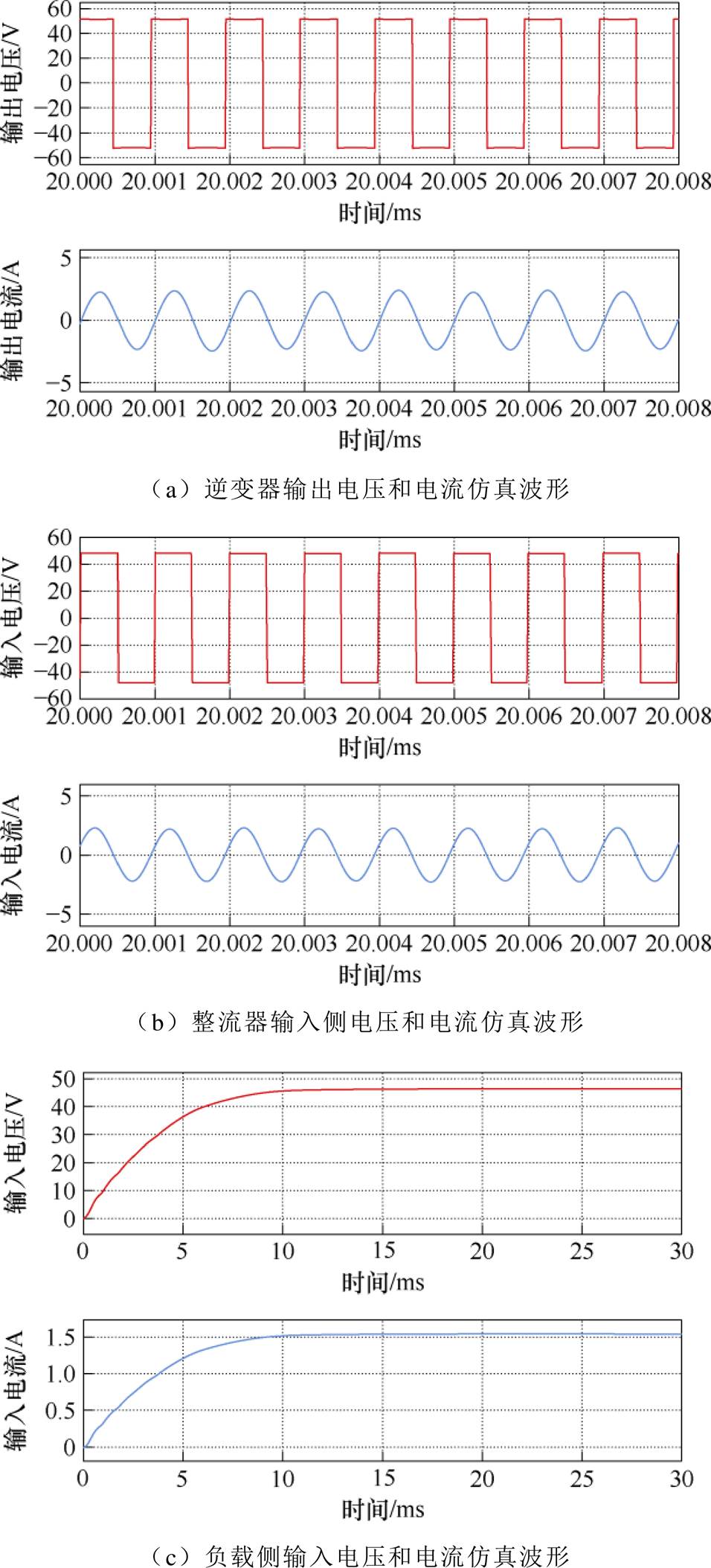
图12 系统仿真波形
Fig.12 System simulation waveforms
为了进一步验证理论分析和仿真结果的正确性,本文搭建了如图13所示的样机装置,本次实验仅对所提方案进行验证,未使用实际无人机电池进行测试,系统实验主要电路参数见表3。实验装置
主要由高频电源、低通滤波器、功率表、谐振补偿网络、电场耦合机构、全桥整流器、负载和相关测量设备组成。该电场耦合机构采用铝材制成,发射极板和接收极板之间的介质为亚克力板,该电场耦合机构接收端金属极板为铝箔,对无人机载重影响极小。
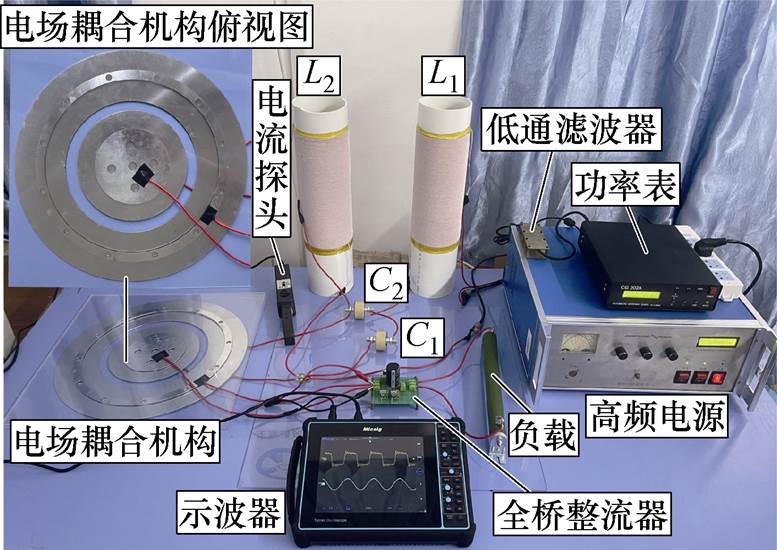
图13 样机装置
Fig.13 Prototype unit
图14为系统未发生偏移时各参数实验波形,图14a为全桥整流器输入侧电压和电流实验波形,图14b为负载两端电压实验波形。系统输出电压为44.78 V,输出功率为66.84 W,传输效率为83.6%。系统的损耗主要包括谐振补偿元件与耦合机构部分的损耗以及整流滤波部分的损耗,根据系统输入功率、整流器输入侧功率以及输出功率,可计算出在该实验中系统的总损耗为13.16 W,其中谐振补偿网络与耦合机构部分的损耗为7.31 W,约占总损耗55.6%,整流滤波部分的损耗为5.85 W,约占总损耗44.4%。
表3 系统实验主要电路参数
Tab.3 System experiment maincircuit parameter
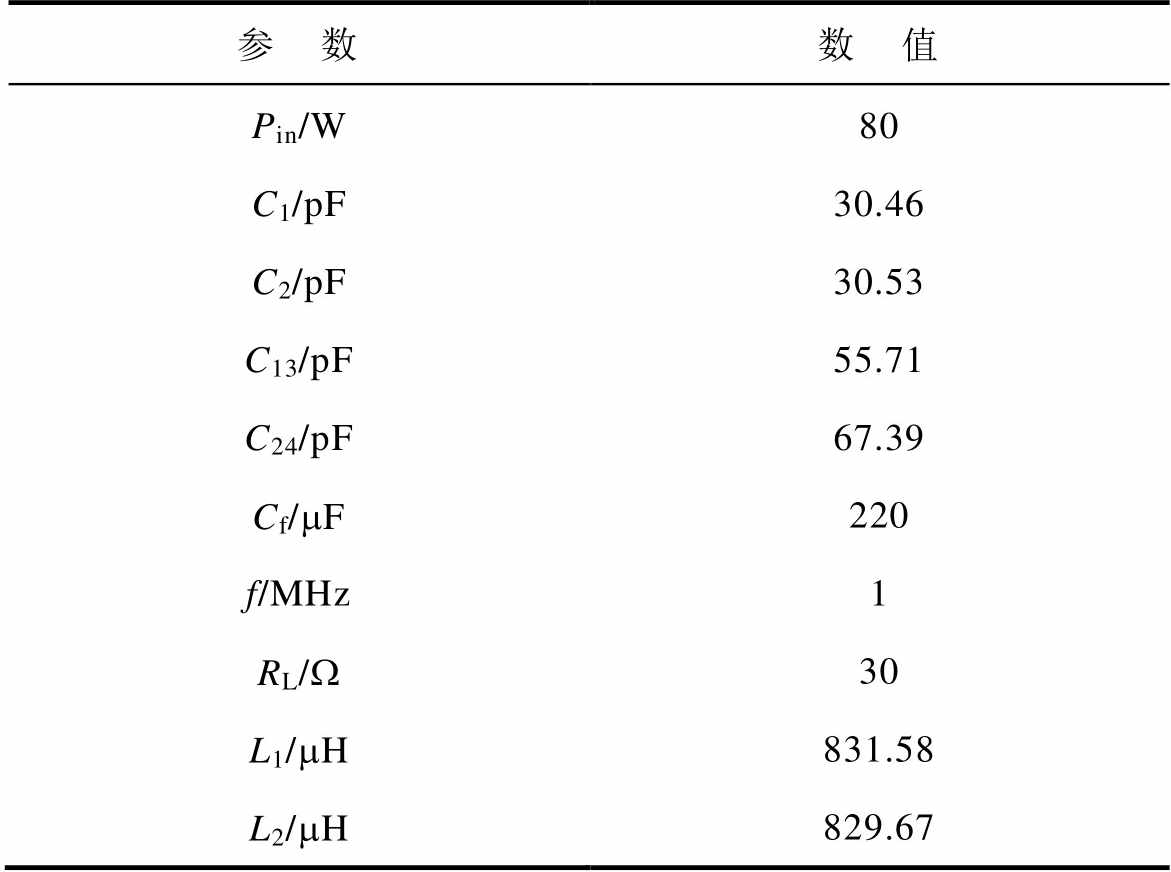
参 数数 值 Pin/W80 C1/pF30.46 C2/pF30.53 C13/pF55.71 C24/pF67.39 Cf/mF220 f/MHz1 RL/W30 L1/mH831.58 L2/mH829.67
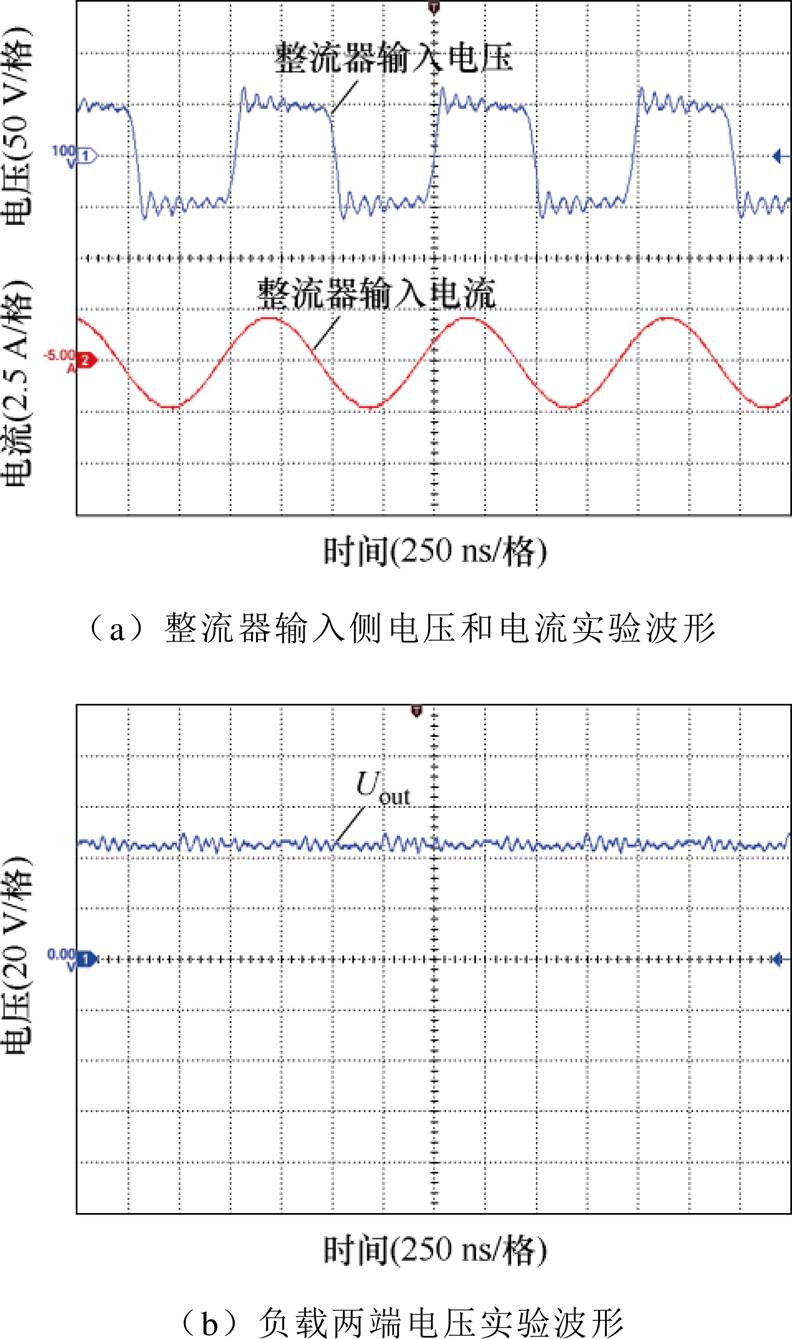
图14 样机实验波形
Fig.14 Prototype experimental waveforms
为进一步研究该系统在偏移情况下的无线电能传输情况,对该系统在耦合机构偏移过程中的性能进行仿真和实验分析,偏移情况下系统的输出电压、输出功率与传输效率变化情况的仿真和实验分析结果如图15所示。
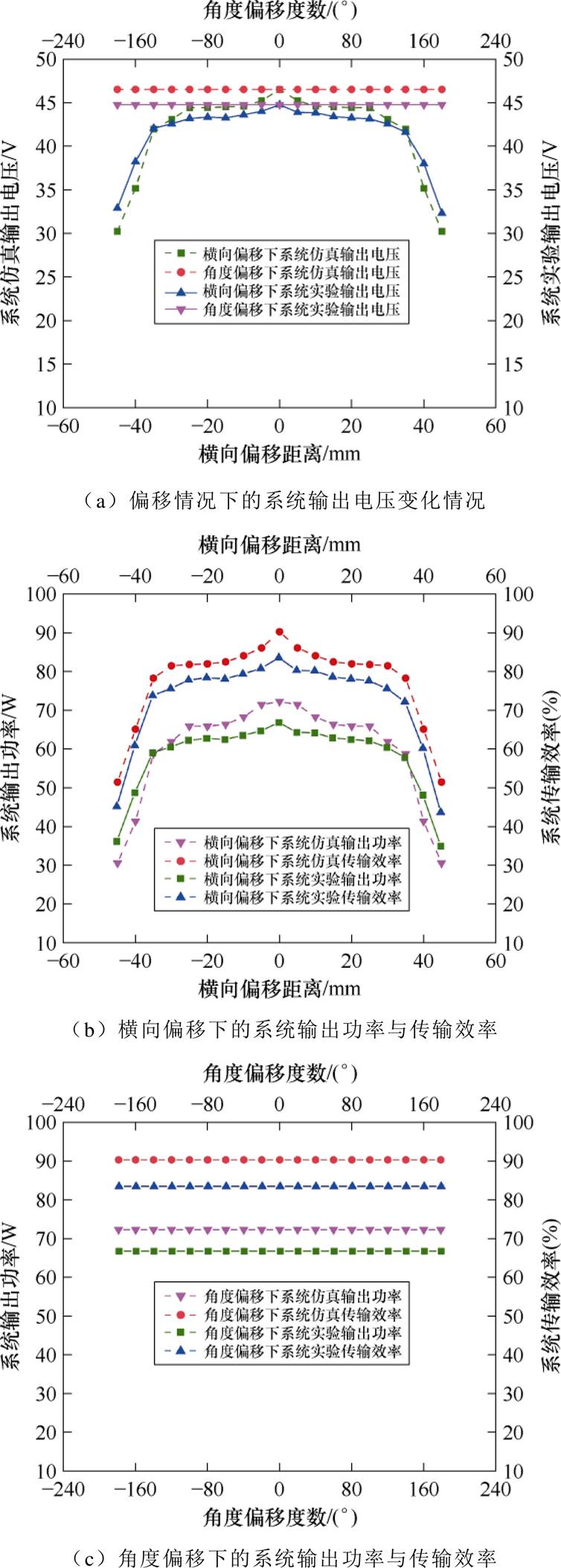
图15 不同偏移情况下系统输出参数变化情况
Fig.15 Variation of system output parameters for different offsets
如图15a所示,耦合机构的接收端在[-35 mm,35 mm]范围内发生横向偏移过程中,系统无人机电池负载侧的输出电压仿真结果稳定在[41.98 V, 46.55 V]之间,实验结果稳定在[41.63 V, 44.78 V]之间。耦合机构接收端在发生360°角度偏移过程中,系统输出电压仿真结果稳定在46.55 V,实验结果稳定在44.78 V左右。在设计偏移范围内,系统输出电压基本稳定,因此可以近似认为本系统在设计偏移范围内具备恒压输出特性。
如图15b所示,耦合机构的接收端在[-35 mm, 35 mm]范围内发生横向偏移过程中,仿真中系统无人机负载侧的输出功率稳定在[58.75 W, 72.23 W]之间,系统的传输效率稳定在[78.3%, 90.3%]之间;实验中系统无人机电池负载侧的输出功率稳定在[57.77 W, 66.84 W]之间,系统的传输效率稳定在[72.2%, 83.6%]之间,这表明在耦合机构接收端发生[-35 mm, 35 mm]横向偏移范围内,系统整体性能稳定,能够保证系统对无人机电池负载高效稳定的无线电能传输。
如图15c所示,耦合机构接收端在发生360°角度偏移过程中,仿真中系统的输出功率维持在72.23 W,传输效率维持在90.3%。实验中系统的输出功率维持在66.84 W左右,传输效率维持在83.6%左右,这表明在耦合机构接收端发生360°角度偏移时,仍能实现对无人机电池负载高效稳定的无线电能传输。
当发射端与接收端金属极板横向偏移超过35 mm时,系统输出电压、输出功率和传输效率发生较大幅度下降,这是因为发射端与接收端金属极板的正对耦合面积减小,其等效耦合电容减小,系统无线电能传输能力降低。
考虑到电池在充放电过程中其等效内阻会发生变化,因此该系统的变负载恒压输出特性具备较强的应用价值。在不同负载阻值下,系统负载侧的输出电压变化情况如图16所示。随着负载阻值的增大,系统输出电压会以越来越小的增长率逐渐增大,并趋于稳定,其中负载阻值在[30 Ω, 60 Ω]之间变化时,系统仿真输出电压变化范围在[46.55 V, 48.92 V]之间,系统实验输出电压变化范围在[44.78 V, 46.31 V]之间,系统输出电压涨幅低于5%,此时系统恒压输出效果较好。因此,可以认为该系统在一定负载阻值变化范围内具备变负载恒压输出特性。
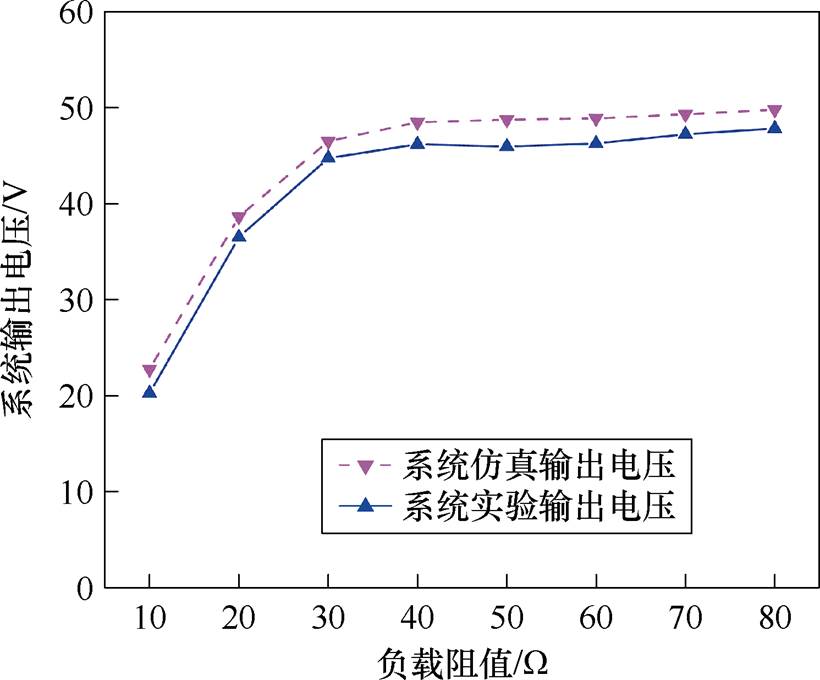
图16 不同负载下系统输出电压变化情况
Fig.16 Variation of system output voltager under different loads
在无人机WPT技术领域,相较于其他无线电能传输方式,电场耦合式WPT技术具备更多的优势,但该技术应用于无人机无线充电领域的研究起步较晚,目前研究成果仍较少。本文提出一种具备轻量化抗偏特性耦合机构的设计思路和一种基于F-LCCL型单侧谐振补偿网络的无人机WPT系统设计方案。为突出本方案的耦合机构及系统的各方面优势,与现有研究技术方案进行对比,见表4。
表4 无人机WPT系统不同方案对比分析
Tab.4 Comparative analysis of different options for UAV WPT systems
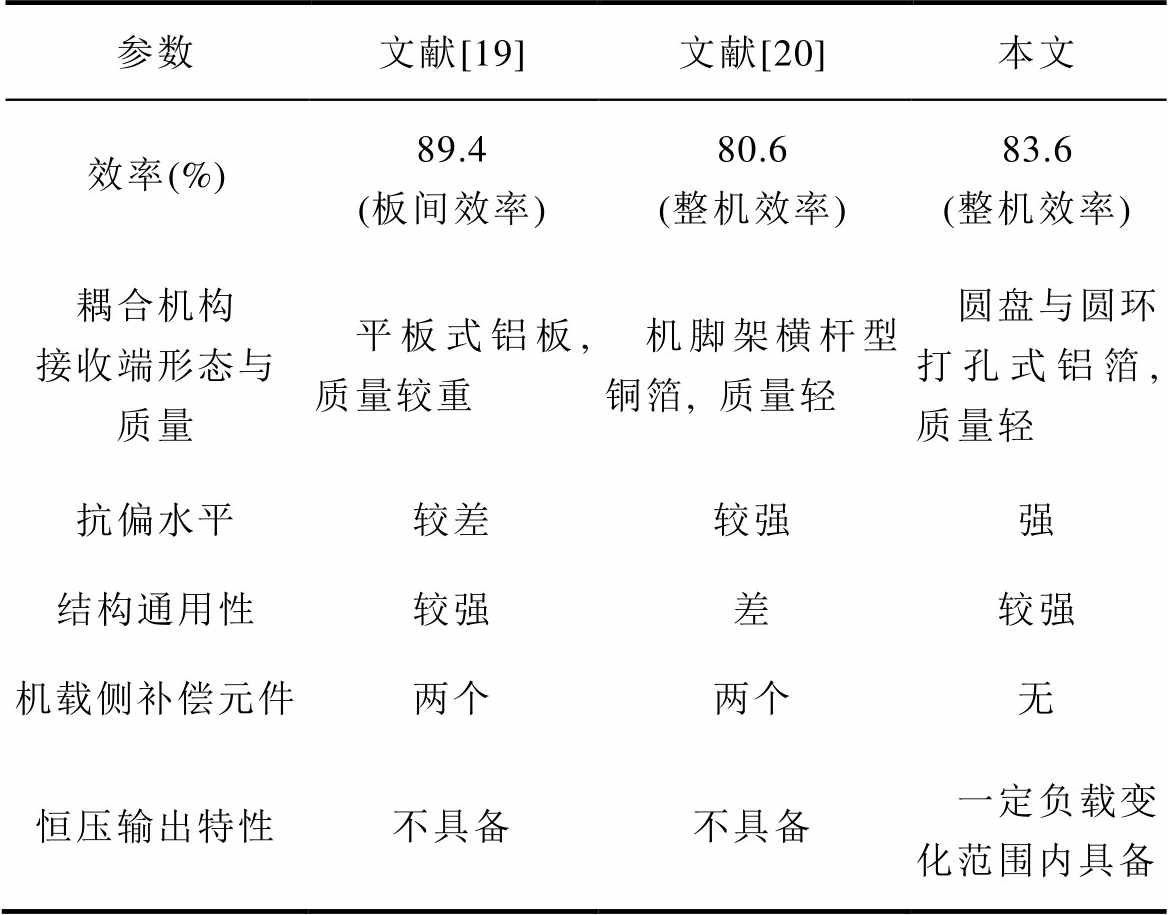
参数文献[19]文献[20]本文 效率(%)89.4 (板间效率)80.6 (整机效率)83.6 (整机效率) 耦合机构接收端形态与质量平板式铝板, 质量较重机脚架横杆型铜箔, 质量轻圆盘与圆环打孔式铝箔, 质量轻 抗偏水平较差较强强 结构通用性较强差较强 机载侧补偿元件两个两个无 恒压输出特性不具备不具备一定负载变化范围内具备
本文提出了一种轻量化抗偏耦合机构设计思路和一种基于F-LCCL型单侧谐振补偿网络的无人机无线电能传输系统设计方案,采用有限元分析法对所提轻量化抗偏电场耦合机构进行了耦合性能分析,并基于Matlab/Simulink搭建了工作频率为1 MHz的系统仿真电路和实验平台。通过仿真及实验验证:该系统耦合机构机载端金属极板在发生位移和角度偏移过程中,系统的输出电压、输出功率和传输效率均能保持相对稳定,该系统在输入功率为80 W时,最佳输出功率为66.84 W,最佳传输效率为83.6%,能保证对无人机电池负载高效稳定的无线电能传输。考虑到无人机电池负载充放电过程中等效内阻的变化以及机载侧的轻量化问题,设计了F-LCCL型单侧谐振补偿网络,使得该系统在一定负载变化范围内具备变负载恒压输出特性,在电场耦合机构和谐振补偿网络两方面实现了机载侧的轻量化。
参考文献
[1] Chan K W, Nirmal U, Cheaw W G. Progress on drone technology and their applications: a comprehensive review[C]//AIP Conference Proceedings, Ho Chi Minh, Vietnam, 2018: 1-20.
[2] 隋宇, 宁平凡, 牛萍娟, 等. 面向架空输电线路的挂载无人机电力巡检技术研究综述[J]. 电网技术, 2021, 45(9): 3636-3648.
Sui Yu, Ning Pingfan, Niu Pingjuan, et al. Review on mounted UAV for transmission line inspection[J]. Power System Technology, 2021, 45(9): 3636-3648.
[3] 彭仲仁, 刘晓锋, 张立业, 等. 无人飞机在交通信息采集中的研究进展和展望[J]. 交通运输工程学报, 2012, 12(6): 119-126.
Peng Zhongren, Liu Xiaofeng, Zhang Liye, et al. Research progress and prospect of UAV applications in transportation information collection[J]. Journal of Traffic and Transportation Engineering, 2012, 12(6): 119-126.
[4] Nwaogu J M, Yang Yang, Chan A P C, et al. Application of drones in the architecture, engineering, and construction (AEC) industry[J]. Automation in Construction, 2023, 150: 104827.
[5] Bin Junaid A, Lee Y, Kim Y. Design and imple- mentation of autonomous wireless charging station for rotary-wing UAVs[J]. Aerospace Science and Technology, 2016, 54: 253-266.
[6] 安富强, 赵洪量, 程志, 等. 纯电动车用锂离子电池发展现状与研究进展[J]. 工程科学学报, 2019, 41(1): 22-42.
An Fuqiang, Zhao Hongliang, Cheng Zhi, et al. Development status and research progress of power battery for pure electric vehicles[J]. Chinese Journal of Engineering, 2019, 41(1): 22-42.
[7] 荣灿灿, 严俐慧, 路聪慧, 等. 基于超材料与超表面的无线电能传输技术研究现状与进展综述[J]. 电工技术学报, 2023, 38(20): 5369-5384.
Rong Cancan, Yan Lihui, Lu Conghui, et al. Overview on research status and progress of wireless power transfer technology based on metamaterials and metasurfaces[J]. Transactions of China Electro- technical Society, 2023, 38(20): 5369-5384.
[8] 谢诗云, 杨奕, 李恋, 等. 基于双极性耦合磁场调控的高抗偏移偏转无线电能传输系统[J]. 电工技术学报, 2023, 38(18): 4838-4852.
Xie Shiyun, Yang Yi, Li Lian, et al. Wireless power transfer system with high misalignment tolerance based on bipolar coupling magnetic-field control[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 4838-4852.
[9] 杨云虎, 贾维娜, 梁大壮, 等. LCC-LCC/S自切换恒流-恒压复合型无线电能传输系统[J]. 电工技术学报, 2023, 38(18): 4823-4837, 4852.
Yang Yunhu, Jia Weina, Liang Dazhuang, et al. A self-switching wireless power transfer system based on hybrid topology of LCC-LCC/S with constant current and constant voltage[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 4823-4837, 4852.
[10] 陈永洪, 黎祎阳, 杨斌, 等. 基于多中继线圈结构的无线电能传输系统恒流/恒压输出方法[J]. 电力系统自动化, 2022, 46(20): 147-154.
Chen Yonghong, Li Yiyang, Yang Bin, et al. Constant-current/constant-voltage output method for wireless power transfer system based on multi-relay coil structure[J]. Automation of Electric Power Systems, 2022, 46(20): 147-154.
[11] 张亚伟, 王兴国, 朱箫. 考虑线圈偏移的无线充电系统恒流/恒压输出研究[J]. 电气技术, 2022, 23(6): 93-98, 108.
Zhang Yawei, Wang Xingguo, Zhu Xiao. Research on constant current/constant voltage output of wireless charging system under coil misalignments[J]. Electrical Engineering, 2022, 23(6): 93-98, 108.
[12] Cai Chunwei, Wu Shuai, Jiang Longyun, et al. A 500-W wireless charging system with lightweight pick-up for unmanned aerial vehicles[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 7721-7724.
[13] Han Wei, Chau K T, Jiang Chaoqiang, et al. Design and analysis of quasi-omnidirectional dynamic wireless power transfer for fly-and-charge[J]. IEEE Transactions on Magnetics, 2019, 55(7): 8001709.
[14] Cai Chunwei, Liu Jinquan, Wu Shuai, et al. Development of a cross-type magnetic coupler for unmanned aerial vehicle IPT charging systems[J]. IEEE Access, 2020, 8: 67974-67989.
[15] 郑小瑶, 江彦伟, 疏许健, 等. 宇称-时间对称电场耦合无线电能传输系统电场分布特性研究[J]. 电源学报, 2024, 22(5): 60-66.
Zheng Xiaoyao, Jiang Yanwei, Shu Xujian, et al. Study on Electric-field distribution characteristics of parity-time symmetric electric-field coupled wireless power transfer system [J]. Journal of Power Supply, 2024, 22(5): 60-66.
[16] 苏玉刚, 邓晨琳, 胡宏晟, 等. 基于电场耦合的电能信号并行传输系统串扰抑制方法[J]. 电工技术学报, 2024, 39(6): 1613-1626.
Su Yugang, Deng Chenlin, Hu Hongsheng, et al. Crosstalk suppression method for electric-field coupled power and signal parallel transmission system[J]. Transactions of China Electrotechnical Society, 2024, 39(6): 1613-1626.
[17] 唐丁源, 周玮, 黄亮, 等. 具有恒压输出特性的电场耦合式动态无线电能传输技术[J]. 电工技术学报, 2023, 38(20): 5385-5397.
Tang Dingyuan, Zhou Wei, Huang Liang, et al. Dynamic electric-filed coupled wireless power transfer system with constant voltage output characteristics[J]. Transactions of China Electro- technical Society, 2023, 38(20): 5385-5397.
[18] Muharam A, Mostafa T M, Hattori R. Design of power receiving side in wireless charging system for UAV application[C]//2017 International Conference on Sustainable Energy Engineering and Application (ICSEEA), Jakarta, Indonesia, 2017: 133-139.
[19] Park C, Park J, Shin Y, et al. Separated circular capacitive coupler for reducing cross-coupling capa- citance in drone wireless power transfer system[J]. IEEE Transactions on Microwave Theory and Tech- niques, 2020, 68(9): 3978-3985.
[20] 武帅, 陈星维, 孟祥尧, 等. 具有强抗偏移及轻量化特性的电场耦合式无人机无线电能传输系统[J]. 中国电机工程学报, 2023, 43(6): 2404-2413.
Wu Shuai, Chen Xingwei, Meng Xiangyao, et al. Electric-field coupled wireless power transfer system with misalignment-tolerance and light-weight charac- teristics for unmanned aerial vehicle applications[J]. Proceedings of the CSEE, 2023, 43(6): 2404-2413.
[21] 汪小娜, 高星冉, 孙盼, 等. 使用环状极板的电容耦合式无线电能传输系统[J]. 电器与能效管理技术, 2018(7): 1-8.
Wang Xiaona, Gao Xingran, Sun Pan, et al. Capaci- tive power transfer system with annular coupling plates[J]. Electrical & Energy Management Tech- nology, 2018(7): 1-8.
[22] 赵良玉, 李丹, 赵辰悦, 等. 无人机自主降落标识检测方法若干研究进展[J]. 航空学报, 2022, 43(9): 025882.
Zhao Liangyu, Li Dan, Zhao Chenyue, et al. Some achievements on detection methods of UAV autonomous landing markers[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(9): 025882.
[23] 陶孟卫, 姚宇威, 元海文, 等. 无人机自主降落视觉标识设计及位姿测量方法[J]. 仪器仪表学报, 2022, 43(5): 155-164.
Tao Mengwei, Yao Yuwei, Yuan Haiwen, et al. Visual target design and pose measurement method for UAV autonomous landing[J]. Chinese Journal of Scientific Instrument, 2022, 43(5): 155-164.
[24] 冯天旭, 孙跃, 王智慧, 等. 基于环形偶极组合式线圈及三维旋转磁场的全角度偏移适应性WPT系统[J]. 中国电机工程学报, 2022, 42(16): 6104-6115, 6184.
Feng Tianxu, Sun Yue, Wang Zhihui, et al. An angular misalignment insensitive WPT system based on a combined circular and dipole coils and a 3-D rotating magnetic field[J]. Proceedings of the CSEE, 2022, 42(16): 6104-6115, 6184.
[25] Qing Xiaodong, Wang Zhihui, Su Yugang, et al. Parameter design method with constant output voltage characteristic for bilateral LC-compensated CPT system[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(3): 2707- 2715.
[26] Huang Liang, Hu A P, Swain A K, et al. Z-impedance compensation for wireless power transfer based on electric field[J]. IEEE Transactions on Power Elec- tronics, 2016, 31(11): 7556-7563.
[27] 苏玉刚, 吴学颖, 赵鱼名, 等. 互补对称式LCC谐振网络的电场耦合式无线电能传输系统参数优化[J]. 电工技术学报, 2019, 34(14): 2874-2883.
Su Yugang, Wu Xueying, Zhao Yuming, et al. Parameter optimization of electric-field coupled wireless power transfer system with complementary symmetric LCC resonant network[J]. Transactions of China Electrotechnical Society, 2019, 34(14): 2874- 2883.
Abstract In recent years, the domestic and international civil UAV market has been developing rapidly, and UAVs have been widely used in various fields, such as electric power inspection, traffic monitoring, firefighting and rescue, agricultural plant protection, environmental mapping, and infrastructure inspection. However, the current challenge facing unmanned aerial vehicle (UAV) applications is the limited battery capacity, which cannot meet the demand for long endurance of UAVs. The emergence of wireless energy transmission (WPT) technology provides a new energy supply for UAVs and has a broad application prospect in the UAV field. Due to the problems of heavy mass, large volume, poor bias resistance, and electromagnetic interference at the onboard side of the coupling mechanism in the current UAV WPT system, a "uniformly drilled disc-circle-circle composite" electric field coupling mechanism and a UAV WPT system based on the F-LCCL-type single-side resonance compensation network are proposed. The lightweight level and anti-bias capability of the airborne side are effectively improved, and the variable load constant voltage output characteristics are provided within a specific load variation range.
Firstly, the practical requirements of the UAV wireless power transmission coupling mechanism were analyzed and summarized, and a design idea of a lightweight bias-resistant wireless power transmission coupling mechanism was proposed, considering structural design, electric field distribution, and bias-resistant capability. Secondly, the system theory was analyzed, and the system circuit based on the F-LCCL single-side resonance compensation network was designed without any reactive power compensation element on the onboard side. The radio energy’s efficient and stable transmission was ensured, and the lightweight of the onboard side was realized from the aspect of the resonance compensation network. In addition, the theoretical analysis shows that the system circuit based on the F-LCCL single-side resonance compensation network has the characteristics of variable load constant voltage output within the design offset range.
The finite element simulation was carried out, and a system simulation circuit based on Matlab/Simulink simulation software and an experimental device were built. The simulation and experimental results show that the scheme proposed can effectively solve the problems of heavy mass, large volume, poor bias resistance, occupying space in the belly of the aircraft, and large electromagnetic interference at the onboard end of the coupling mechanism. Efficient and stable wireless energy transmission to the battery load of the UAV is achieved.
The following conclusions can be drawn. (1) The proposed coupling mechanism has 360°angular deflection resistance and strong lateral deflection resistance. The lightweight onboard side is realized. (2) The F-LCCL single-side resonance compensation network has no compensation element on the secondary side, which realizes the light weight of the onboard side from the resonance compensation network. (3) The system has variable load constant voltage output characteristics within a specific load variation range.
keywords:Unmanned aerial vehicle (UAV), wireless power transfer, coupling mechanism, lightweight, anti-bias
DOI: 10.19595/j.cnki.1000-6753.tces.240902
中图分类号:TM724
国家自然科学基金(61741126)、广西自然科学基金(2022GXNSFAA035533)和桂林电子科技大学研究生教育创新计划(2024YCXS014)资助项目。
收稿日期 2024-05-27
改稿日期 2024-06-25
张 鑫 女,1976年生,高级实验师,研究方向为智能化电器。E-mail: zhangxin_wt@163.com
范兴明 男,1978年生,教授,博士生导师,研究方向为智能化电器及高电压新技术。E-mail: fanxm_627@163.com(通信作者)
(编辑 郭丽军)