图1 S-S网络分析
Fig.1 The analysis of S-S network
摘要 针对旋翼式无人机无线充电系统高抗偏移与低杂散磁场分布的需求,该文提出一种具有高抗偏移及杂散磁场约束特性的“I工I”型磁耦合机构,并结合串联-串联网络特性,设计具有软切换能力的多阶段恒流-恒压控制策略。具体而言,利用铁氧体磁心的低磁阻特性,完成了“工”型发射机构的设计,并通过磁路分析,确定了杂散磁场无源约束的磁路塑形方法。调节所述结构I型磁心的分布,增加“I工I”型磁耦合机构的抗偏移能力。最后,搭建了“I工I”型磁耦合机构实验样机,验证了系统在100 mm的径向偏移与360°的旋转偏移的情况下,输出电流可保持恒定,且传输效率仅有2%的波动。
关键词:无线充电系统 “I工I”型磁耦合机构 高抗偏移特性 杂散磁场约束
旋翼式无人机(Rotor-Unmanned Aerial Vehicles, R-UAV)具有体积小、经济成本低、生存率高[1-2]等优势。通过无线充电技术,可以显著提升R-UAV的机动性,增强R-UAV系统的环境适应能力[3-5]。
在R-UAV无线充电系统设计时,泊机偏移问题尤为突出,亟待解决[6]。目前,文献[7]提出了基于LCL-S恒压谐振网络与DD型发射线圈的磁耦合机构,但该机构在偏移时能量损失较大,影响充电效率。文献[8]则设计了一种多组串联发射线圈和多螺旋管接收的方案,该方案实现了±20 mm偏移情况下的能量传输。然而,在文献[8-10]中,接收线圈的存在增加了R-UAV的风阻,并影响云台放置,限制了R-UAV无线充电技术的广泛应用。
具有恒流特性的串联-串联(Series-Series, S-S)网络相比复合型网络,可以满足锂电池充电需求,同时实现R-UAV接收侧的轻量化[11]。目前,关于S-S网络的研究主要集中在频率跟踪、控制方案优化以及频率分叉特性等角度[12-13]。而多阶段恒流-恒压(Multi-stage Constant Current-Constant Voltage, MCC-CV)充电技术作为新兴的快速充电技术,正逐步受到广泛关注。文献[14-15]对这一技术进行了初步探讨,揭示了MCC-CV充电的显著优势。文献[16]则解决了LLC拓扑在全桥切换半桥时,产生的输出电流振荡问题。目前,结合无线充电系统构建具有MCC-CV特性的无线充电系统研究较少。
本文是在R-UAV锂电池充电特性的背景下展开,综合考虑了S-S网络的阻抗特性和电流增益特性,设计了具有全桥半桥移相软切换性能的MCC- CV控制策略。并针对高抗偏移及杂散磁场约束问题,在充分分析R-UAV结构特性的基础上,创新性地提出了“I工I”型磁耦合机构。该方案将接受侧线圈集成于R-UAV起落架内部,使得系统具有100 mm高抗偏移能力的同时,兼顾360°的旋转偏移,同时利用“工”型磁心完成杂散磁场无源约束。本研究所述R-UAV无线充电方案可以描述为:首先,当R-UAV发生电量不足时,降落于由“工”型磁耦合机构组成的起落平台。然后,由“工”型磁耦合机构向集成于起落架内部的I型接收线圈发射能量。最后,通过谐振网络完成对无人机侧锂电池的供电。
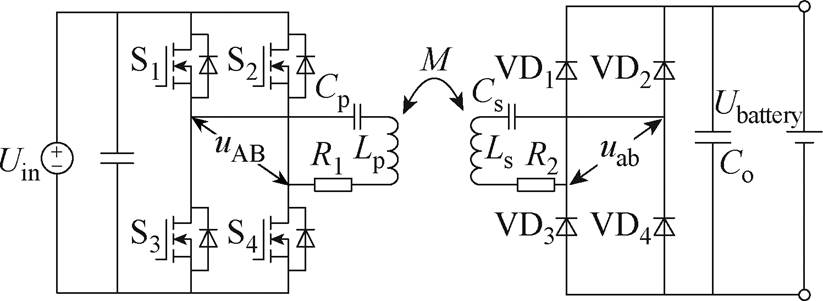
如图1所示的S-S网络分析满足UAV无线充电系统轻量化设计需求,特别适合于锂电池的充电应用。
图1 S-S网络分析
Fig.1 The analysis of S-S network
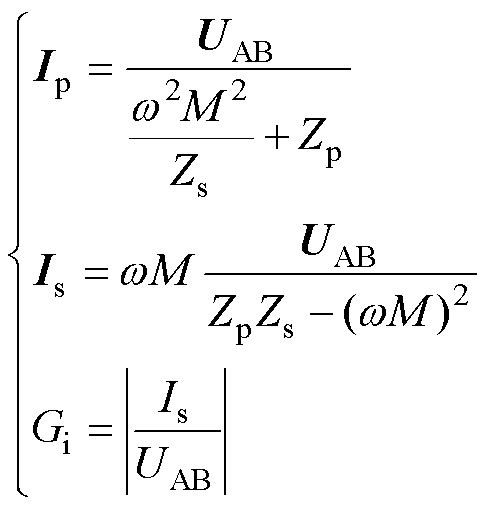
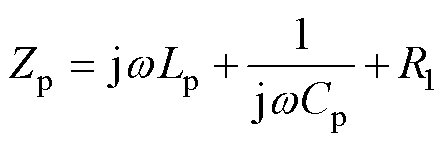
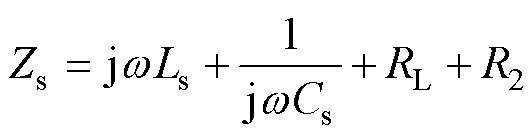
在如图1所示的S-S网络中,Uin为输入电压。通过开关管S1~S4进行高频逆变,其逆变器的瞬时输出电压为uAB,当仅考虑基波分量时,其电压为UAB,方均根值为UAB。uab则为整流器瞬时输入电源,当仅考虑基波分量时,其电压为Uab,方均根值为Uab。发射线圈Lp与电容Cp串联,R1为寄生电阻。Lp通过互感M与接收线圈Ls耦合,而后经过电容Cs由全桥进行整流给电池充电,R2为副边寄生电阻,Ubattery为电池电压。将Ubattery映射到全桥整流前,等效电阻视为RL,输出电流为Ibattery。在仅考虑基波分量时,原边谐振电流为Ip、副边谐振电流为Is,其方均根值分别为Ip、Is,电流增益为Gi。此时
 (1)
(1)
其中
系统的传输效率h 为
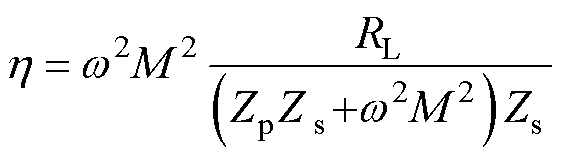 (2)
(2)
即基于S-S谐振网络的无线充电系统传输效率受到工作频率、负载及原副边寄生参数的影响。
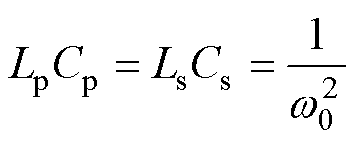
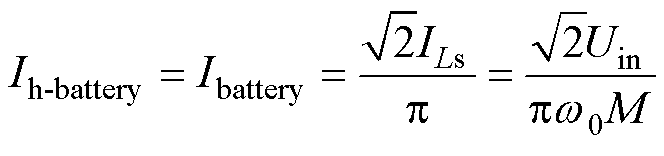
当系统工作在谐振频率w0时,则有
 (3)
(3)
此时,Ip、Is、Ibattery及h 分别为
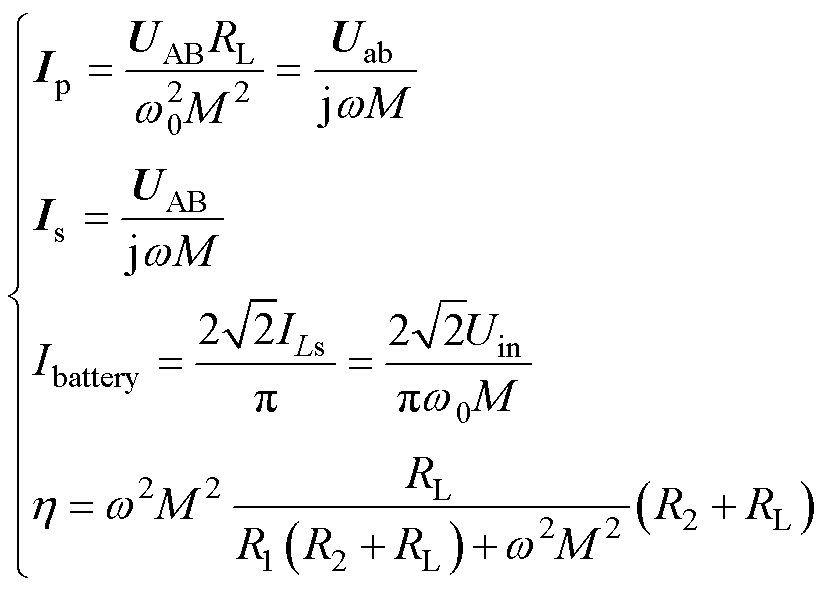 (4)
(4)
当系统工作在谐振频率,且输出电流为定值时,传输效率仅受到系统寄生参数与负载的影响。设定输入电压为52 V,输出电流为6 A,其参数见表1。
表1 S-S网络设计参数
Tab.1 The design parameters for S-S network
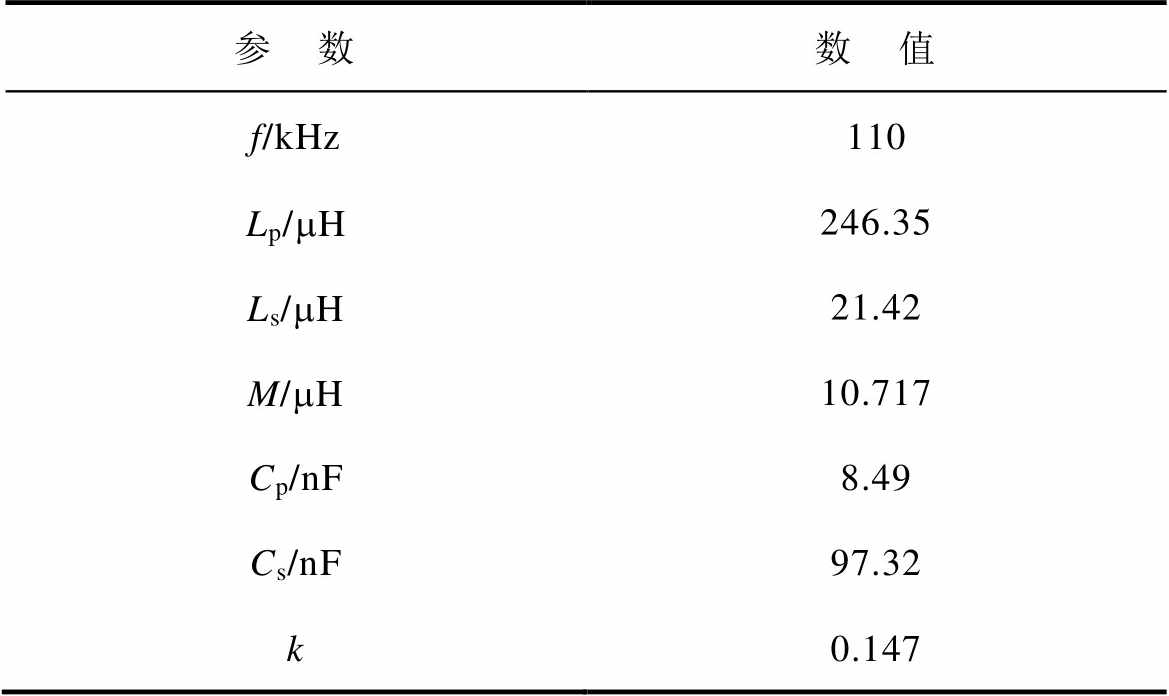
参 数数 值 f/kHz110 Lp/mH246.35 Ls/mH21.42 M/mH10.717 Cp/nF8.49 Cs/nF97.32 k0.147
根据图2所示的半桥模态分析可知,当S2的驱动信号设置为0,S3的驱动信号设置为1时,系统由全桥模态切换为半桥模态。当S1开通、S4关断时,其工作模态如图2a和图2b所示,此时输入电压经过谐振网络后传递给接收线圈。当S4开通、S1关断时,此时系统工作在如图2c和图2d所示的模态,原边瞬时输入电压为0。进而UAB的有效值为1/2Uin,输出电流的有效值为
 (5)
(5)
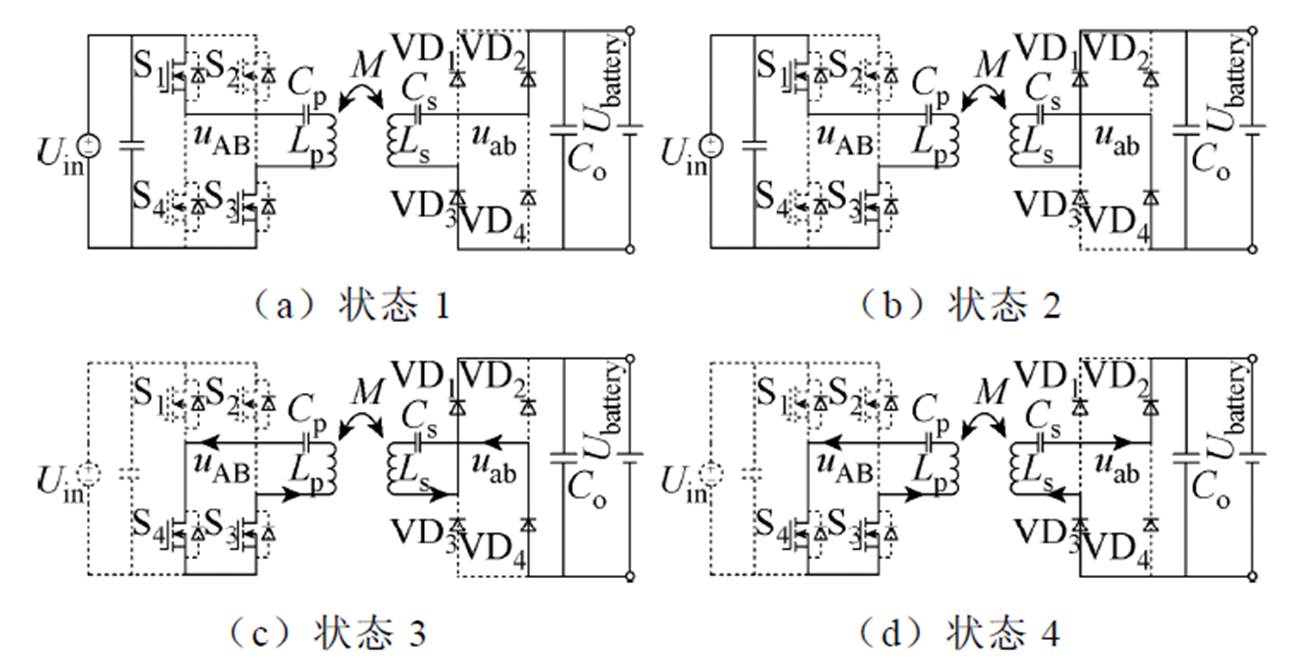
图2 半桥模态分析
Fig.2 The half bridge model analysis
充电过程如图3所示。图3a中,通过不同负载阻值模拟实际电池充电过程中多阶段恒流的工作转换。具体为负载RL=8 W 时的全桥逆变器电流增益特性及负载RL=16 W 时的半桥逆变器电流增益特性,图3粗线及圆环部分表示系统工作区域,主要为全桥模式下的恒流模态、半桥模式下的多阶段恒流模态及半桥模式下的恒压模态。其无线充电系统的充电过程如图3b所示,即在全桥转换为半桥的过程中,其瞬时电流增益变为原来的1/2。此时,由于谐振网络的储能特性,切换过程存在电流振荡的问题。为解决该问题,构建了如图4所示的全桥移相切换半桥工作流程。
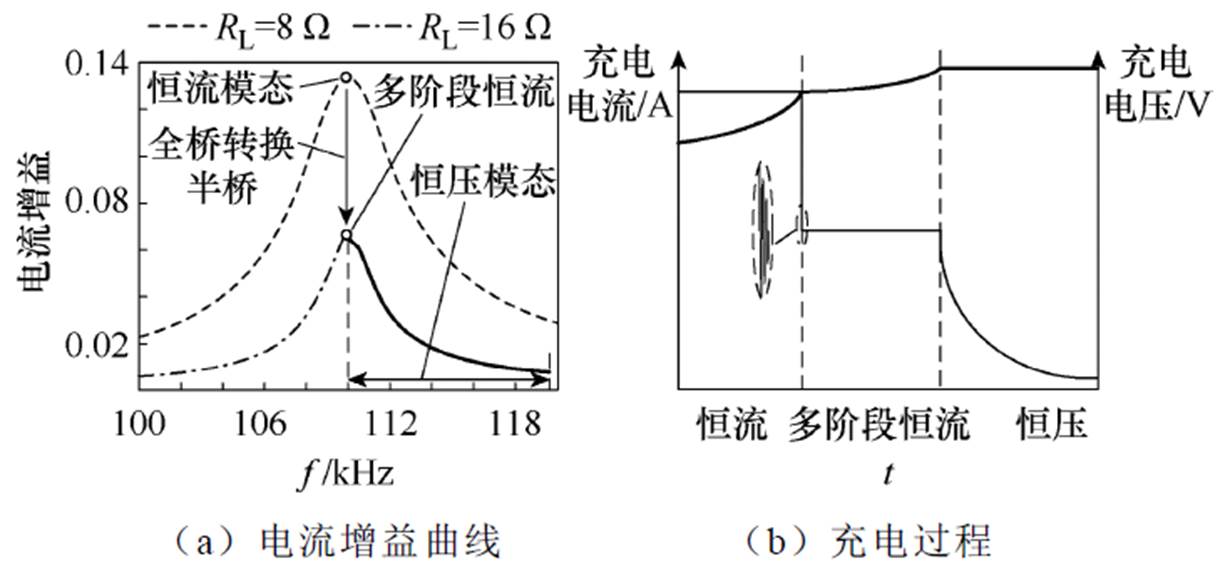
图3 充电过程
Fig.3 Charging flowchart
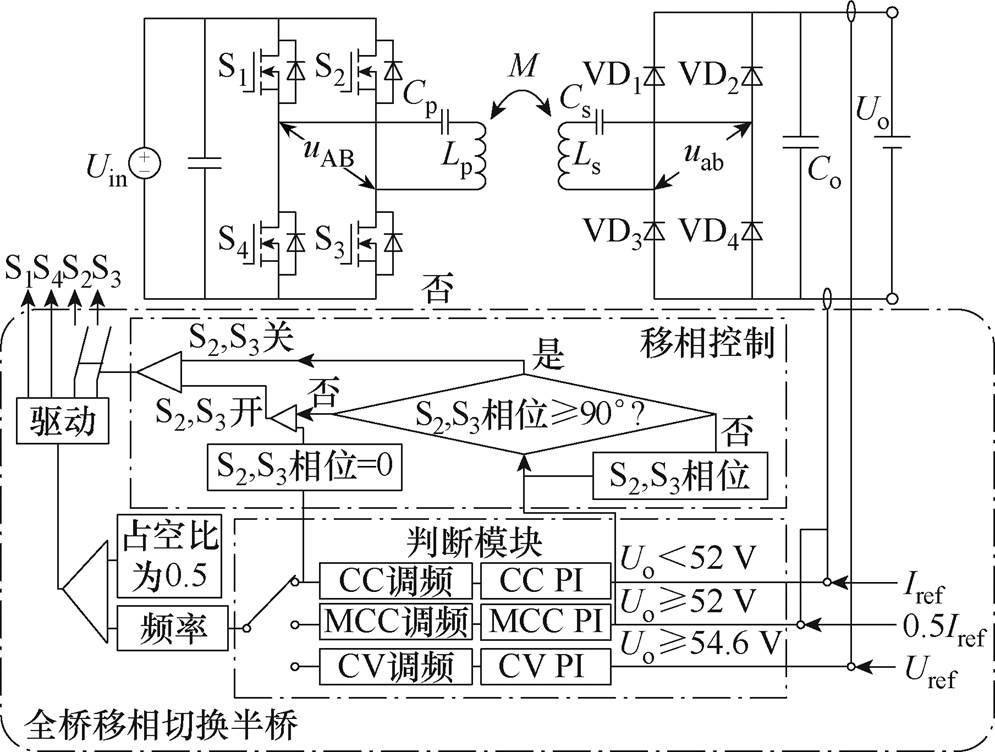
图4 全桥移相软切换半桥工作流程
Fig.4 The working frame diagram of full bridge phase-shift mode switching to half bridge
本文将参考电流Iref设置为S-S谐振网络在谐振点时的工作电流。同时,MCC切换的电压阈值被设定为52 V,恒压值则设定为54.6 V,其整体工作流程如下:
(1)初始判断:判断负载电压状态,确定工作模态。
(2)恒流控制:基于S-S谐振网络适当调频控制,保持输出电流不变。
(3)全桥半桥移相软切换:当负载电压达到或超过52 V时,判断并缓慢调整全桥的桥臂相位。当相位接近90°时,系统会关闭S2并保持S3常开。
(4)半桥MCC模式:输出电流会降至初始电流的一半,参考电流设置为0.5Iref,以恒流控制结束时频率寄存器的结果为MCC模态频率的初始值,继续调频控制保持输出电流不变。
(5)恒压模式:当输出电压达到或超过54.6 V时,系统将利用调频控制进入CV模态。
通过上述设计,可以确保在不同的充电阶段中,无线充电系统都能提供稳定和高效的充电性能。
针对R-UAV无线充电系统具有高抗偏移和低杂散磁场的设计需求,提出了“I工I”型磁耦合机构及其变量分布,如图5a所示。
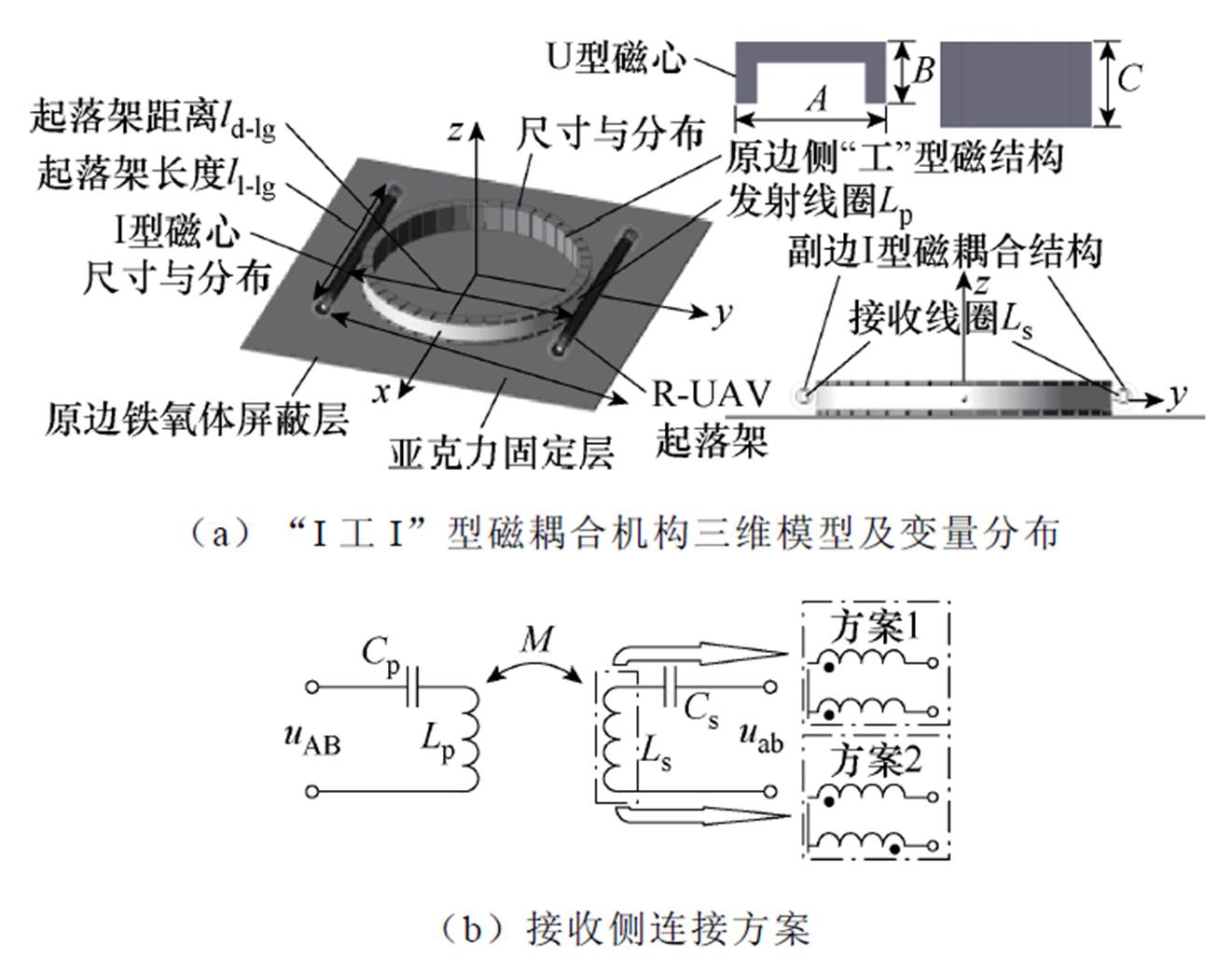
图5 三维模型及变量分布
Fig.5 The 3D model and variable distribution
该磁耦合机构包括发射结构及R-UAV侧接收结构,发射结构为亚克力固定层、原边铁氧体屏蔽层、原边“工”型磁心、“工”型磁心上绕制发射线圈Lp。R-UAV侧接收结构为I型磁心及绕制于I型磁心上的接收线圈Ls,其中I型磁心与Ls线圈均置于R-UAV起落架内部,进而实现R-UAV无线充电的零风阻设计(不改变外部结构)。参考现有R-UAV设计方案,设定所述的“I工I”型磁耦合机构的起落架间距离ld-lg=300 mm,起落架长度ll-lg=280 mm。选用TDG公司尺寸为500 mm×500 mm×3 mm的TPW33材质铁氧体屏蔽层,并将40只U 32.5/13/ 18.5型磁心拼接成内径为250 mm的“工”型磁心放置于屏蔽层中央。I型磁心内切于直径为15 mm的起落架,结合工程实际特性,选用单只尺寸为I 100/13/5的磁心进行接收结构的设计。其中I型磁心、U型磁心均为初始磁导率mi=2 300的铁氧体材质构成。规定副边接收线圈均统一沿逆时针方向绕制,其接收线圈存在如图5b所示的两种串联方式。在接收侧线圈连接方案1中,原边耦合到接收侧的电压叠加抵消。方案2中,接收侧的感应电压Us为
 (6)
(6)
式中,M1为发射线圈与接收线圈的互感1;M2为发射线圈与接收线圈的互感2;Meq为发射与接收线圈的等效互感,即发射与接收线圈间互感受到接收侧的两路I型磁耦合机构综合影响。
“工”型磁心可以将平面布局的圆形(Circle Pad, CP)发射线圈转换为空间特性,进而利用磁心的低磁阻特性对磁场塑形来实现杂散磁场的约束。因而绘制“工”型磁心与I型磁心不同距离情况下的磁场分布特性,如图6所示。
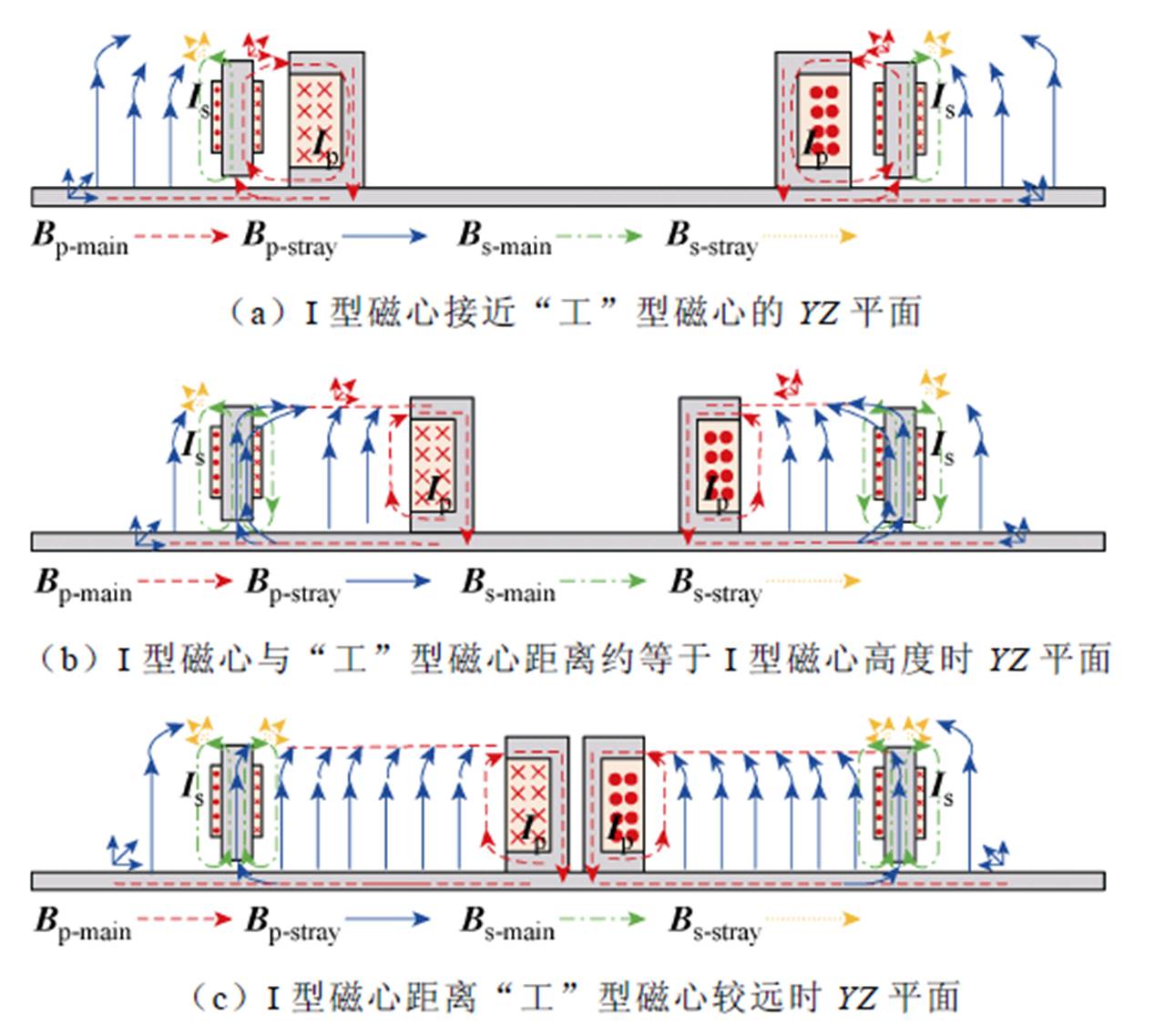
图6 磁通特性分析
Fig.6 Analysis of magnetic flux characteristics
图6中,Bp-main为Ip产生主磁场的磁通密度;Bp-stray为Ip产生杂散磁场的磁通密度;Bs-main为Is产生主磁场的磁通密度;Bs-stray为Is产生杂散磁场的磁通密度。图6a中,Bp-main经过空气后主要耦合在I型磁心上,漏磁通相对较少。随着I型磁心与“工”型磁心间的距离变远,一部分“工”型磁心产生的Bp-main经由空气后回到“工”型磁心。此时,Bp-stray经过I型磁心,其磁通密度分布特性如图6b所示。而当“工”型磁心与I型磁心距离足够远时,发生了如图6c所示的磁通密度分布,在该特性下,Bp-main几乎完全回到类“工”型磁心。利用有限元仿真分析软件,绘制不同位置的“I工I”型磁耦合机构磁通分布特性如图7所示。I型磁心沿着X轴方向在一定程度内的偏移几乎不影响I型磁心与“工”型磁心间的最近距离,其耦合系数发生的变动较小。根据“工”型磁心特性可知,Bp-main流回“工”型磁心,而在距离I型磁心相对较远的区域其产生的Bp-stray经过I型磁心后流回“工”型磁心。
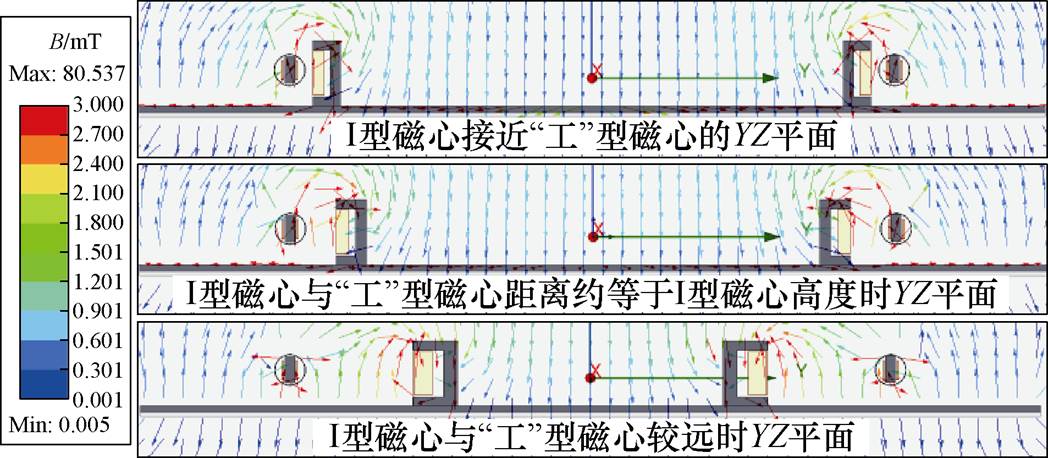
图7 基于有限元仿真的磁通特性
Fig.7 Magnetic flux distribution by FEA
通过磁路的分析以确定“工”型磁心具有较好的抗偏移性能及杂散磁场收敛特性。为对比分析本文所述“工”型磁心与传统单极CP型发射线圈的杂散磁场分布特性,建立如图8所示的杂散磁场分布模型。其中,“工”型磁心在本文所设定的额定电流下激励,同时采用控制变量法,仅改变发射线圈形状,保持CP型线圈的电流激励大小、电感量与“工”型磁心相同。此时,本文所述的“工”型磁心的磁场分布较为集中,距离“工”型发射线圈500 mm处磁场的磁通密度峰值Bmax-p为12.2 mT,而在电流激励大小、电感量均相同的CP型线圈中,500 mm处磁场的磁通密度峰值为15.72 mT,且“工”型发射线圈的空间高杂散磁场区域明显小于传统CP结构。
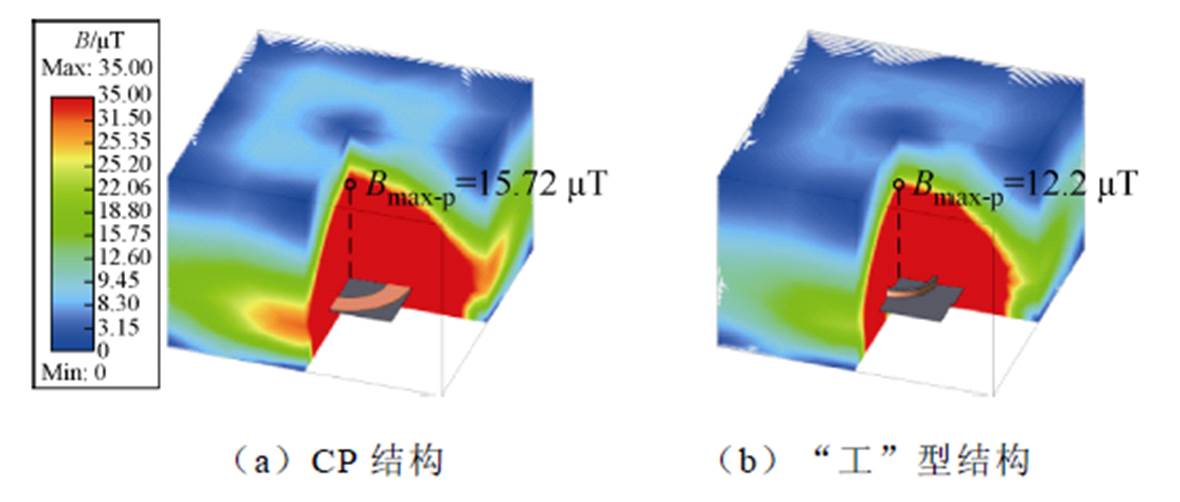
图8 杂散磁场分布对比
Fig.8 Comparison of stray magnetic field characteristics
在无线充电系统中,抗偏移能力主要取决于磁耦合机构在设定偏移范围内耦合系数的变化率。在“I工I”型磁耦合机构中,I型磁心的空间分布影响着I型磁心与“工”型磁心的互感和磁通,进而影响了Lp与Ls的耦合特性。仅考虑平行于起落架方向与旋转偏移时,其“I工I”型磁耦合机构的偏移状态,如图9a所示。需要特别注意的是,垂直于起落架方向的偏移拟通过机械辅助的方式实现,具体参见附录。由于I型磁心的长度占R-UAV起落架长度的35%,设定两根I型磁心构成单侧起落架内的磁结构。取I型磁心间距离为0 mm(II0)及25 mm(II25),其耦合特性如图9b和图9c所示。
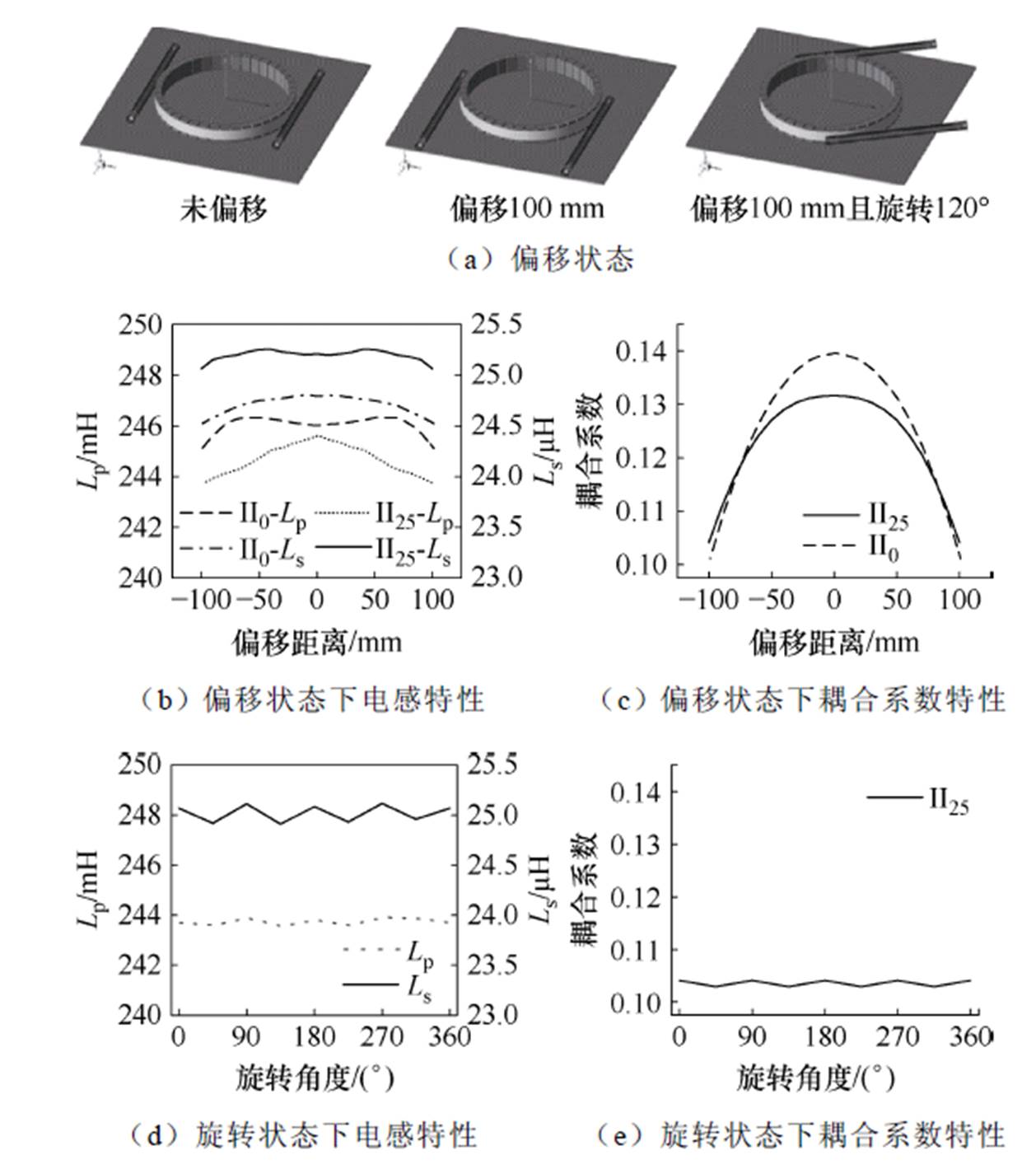
图9 偏移状态分析
Fig.9 Analysis of offset states
根据图9d与图9e可知,在偏移角度为0~360°的范围内其系统原边自感、副边自感及耦合系数均未发生明显变化,II25型磁心分布方案未影响系统的抗旋转偏移能力。即“I工I”型磁耦合机构具有较好的抗偏移性能及低杂散磁场分布特性。
为验证本文所提的基于S-S网络且具有MCC- CV特性的R-UAV无线充电系统及具有高抗偏移性能的“I工I”型磁耦合机构,搭建了如图10所示的UAV无线充电系统样机。其中原边采用WMO28N15T2开关管搭建高频全桥逆变模块,R-UAV接收侧则采用同款开关管配合同步整流控制芯片组成全桥高频整流模块。功率由ITECH-M3432提供,并利用电子负载ITECH-M3332模拟R-UAV侧锂电池特性完成整个实验。基于R-UAV的运行特性,在表2中制定了无线充电系统的实验参数。
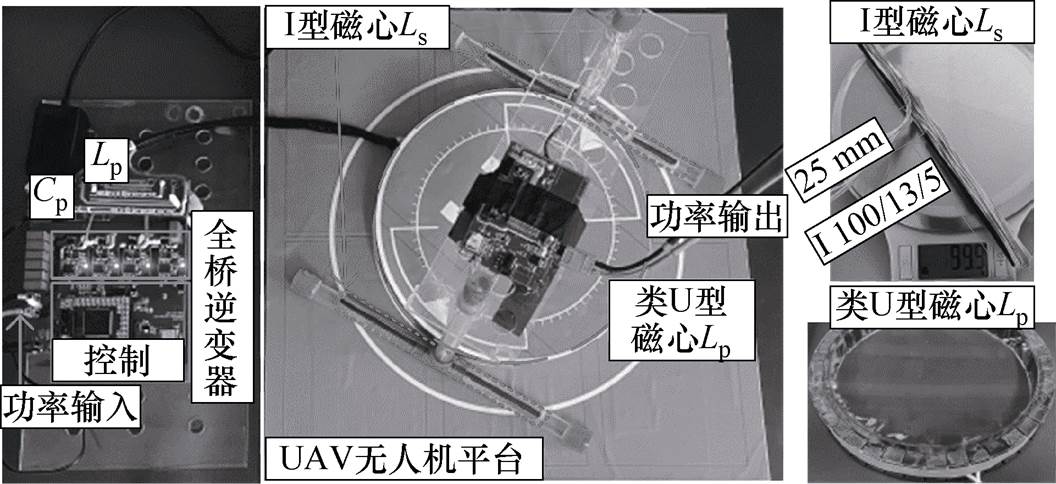
图10 UAV无线充电系统样机
Fig.10 The prototype for UAV wireless charging system
表2 实验参数
Tab.2 The experimental parameters
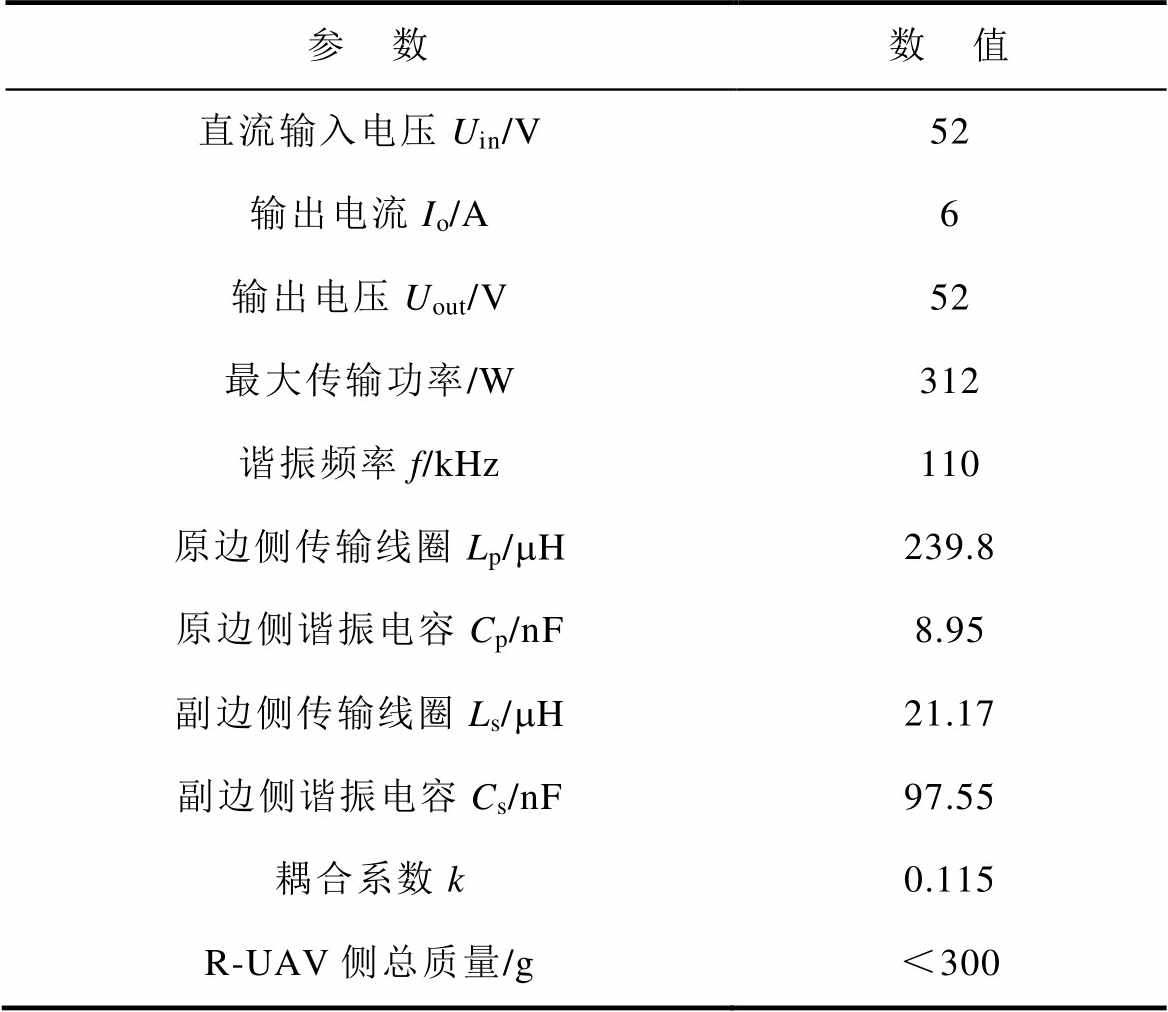
参 数数 值 直流输入电压Uin/V52 输出电流Io/A6 输出电压Uout/V52 最大传输功率/W312 谐振频率f/kHz110 原边侧传输线圈Lp/mH239.8 原边侧谐振电容Cp/nF8.95 副边侧传输线圈Ls/mH21.17 副边侧谐振电容Cs/nF97.55 耦合系数k0.115 R-UAV侧总质量/g<300
副边接收线圈质量为198 g,在加入副边印制电路板(Printed Circuit Board, PCB)部分时,其整体质量小于300 g。测量该磁耦合机构在无偏移及沿X轴偏移时功率传输结构的电感值、功率传输结构间耦合系数,如图11所示。
由图11可知,本文所提出“I工I”型磁耦合机构,在系统偏移过程中,其耦合系数与自感值变化相对较为缓慢,即该磁耦合机构具有较好的抗偏移能力。
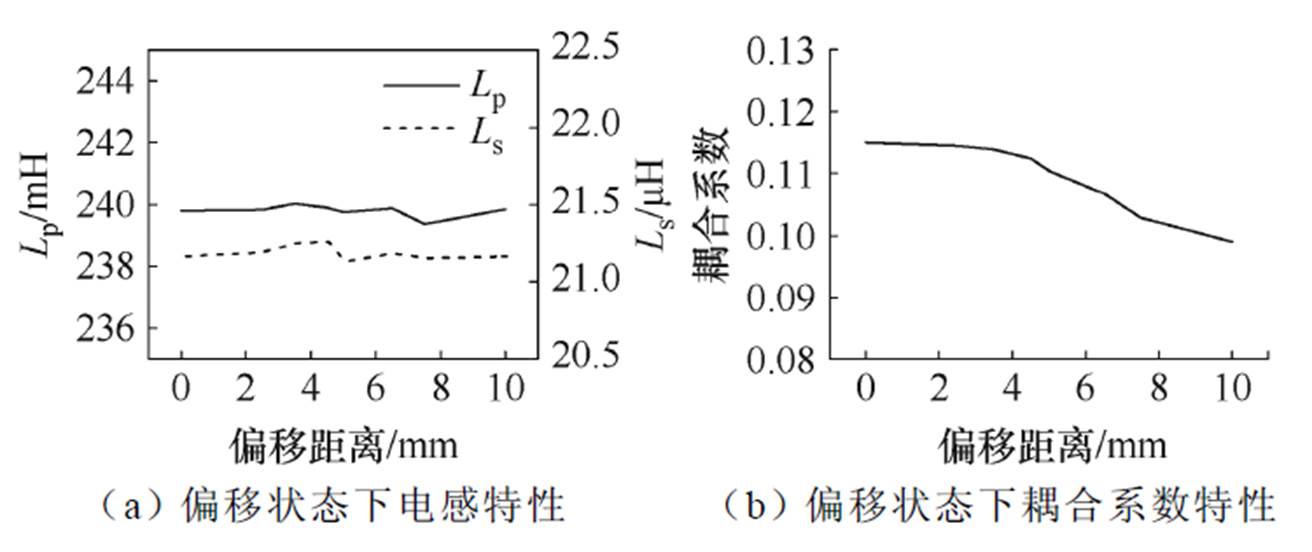
图11 偏移特性曲线
Fig.11 Offset characteristics curves
当输入电压为52 V,输出电流为6 A时,分析系统工作在负载电池电压51 V(接近最大传输功率)及负载电池电压充电到52 V(MCC切换)的工作特性,在正对情况下的系统稳态工作情况如图12a~图12c所示。此时,Vgs1为S1的驱动电压,进而图12a为负载电池欠电压时系统工作特性,负载电压为36 V,谐振补偿电流Ip呈正弦电流特性,并且此时Ip滞后于全桥的中点电压uAB。
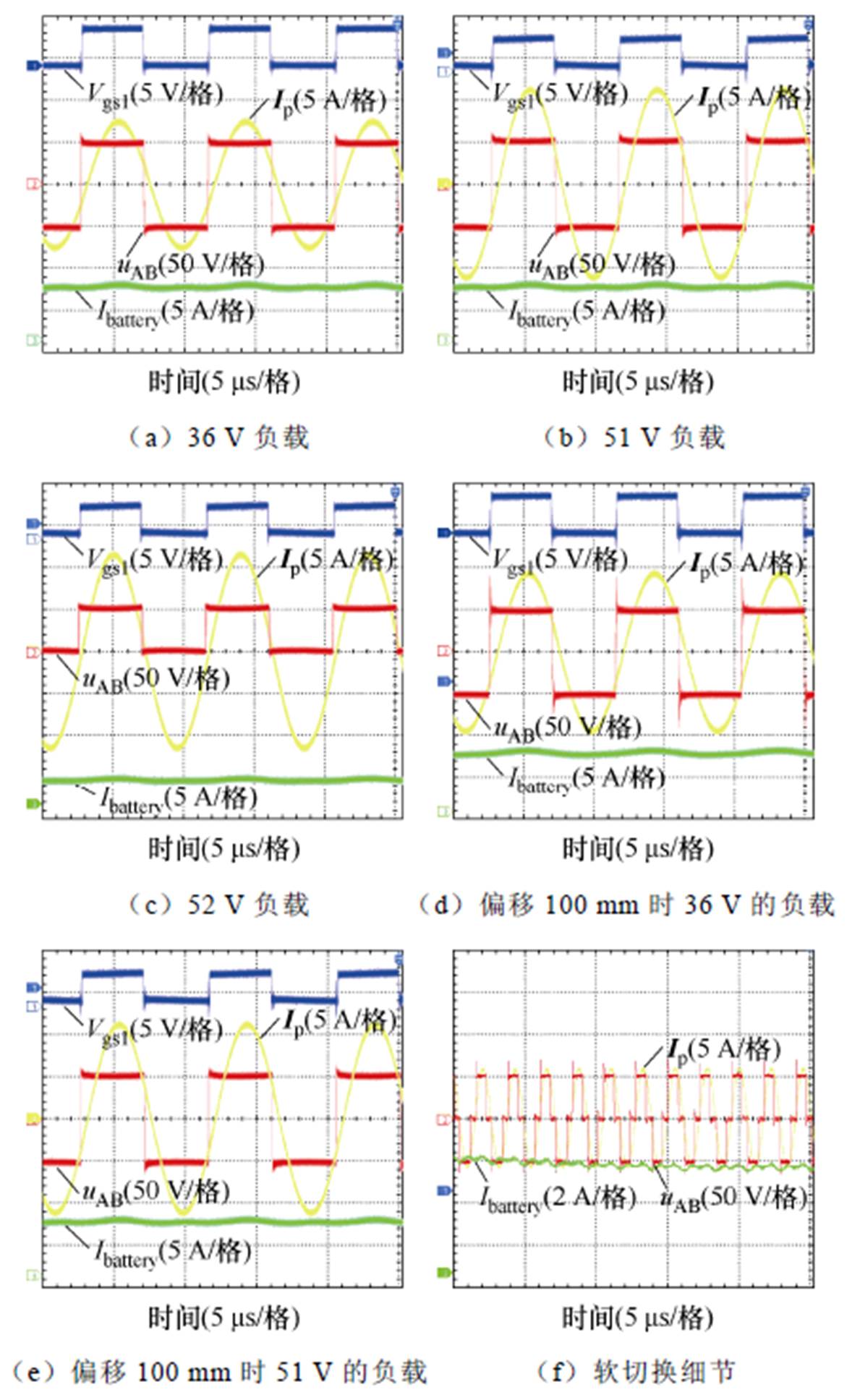
图12 实验波形
Fig.12 Experimental waveforms
随着负载电压的增加,通过适当调节频率可保持输出电流Ibattery不变,同时Ip在保持ZVS特性的条件下逐渐增大,系统在额定工作状态下较为稳定。进一步地,当负载电压提升至52 V时,系统在半桥模态下工作。此时,根据图12b可知,点电压由±uAB的方波转为uAB的方波,即输出电压的有效值降低为原来的一半。在该模态下,动作的开关管S1、S4保持ZVS工作特性,系统输出电流降低至全桥工作状态的一半,即系统工作在MCC模态。由图11可知,当系统发生偏移时,其无线充电系统的耦合系数呈减小趋势。进一步地,根据式(4)可知,随着耦合系数的减小,在不改变谐振频率的情况下其输出电流增大。为实现满足设计要求的输出电流,其需要调节到较高的谐振频率。将图12d、图12e偏移状态下系统的工作特性与图12a、图12b进行对比。在偏移状态且输出电流相同的情况下,原边Ip较高且系统工作频率较高。综上所述,本文所述“I工I”型磁耦合机构可在偏移100 mm的情况下稳定工作。
为对比本文所述全桥移相软切换半桥与直接切换半桥的不同特性,在图13a中展示了全桥直接切换半桥的瞬态切换过程。在切换瞬间,其输出电流的振荡问题较为明显。若采用图4所述的控制方案,可有效减小电流振荡特性,其切换特性如图13b所示。局部放大切换过程,其具体波形如图12f所示。在移相切换的过程中,全桥输入电压转变为三电平模式,随着移相角的增大其输出电压有效值逐渐降低,因而其输出电流逐渐降低。在效率分析时将无线充电系统分解,取CC模态、MCC模态与CV模态分别分析系统充电效率。其中CC模态发生在负载电压为36~52 V期间,整体功率范围为216~312 W,MCC模态发生在负载电压为52~54.6 V范围内,其整体功率为156~164 W,CV模态发生在负载电压为54.6 V时,在本文的研究中针对CV模态设计的截止功率为满功率传输的1/4。
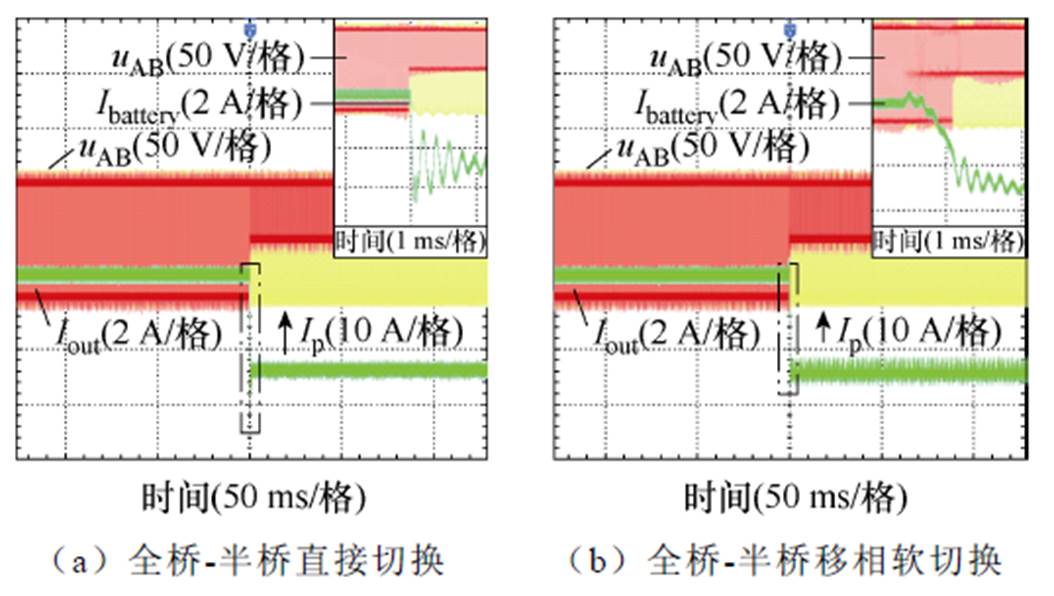
图13 MCC切换过程测试结果
Fig.13 Test results of MCC switching process
传输效率随着负载功率的变化而变化。在系统正对的情况下其传输效率最高发生在负载电压为36 V时,此时的传输效率为89.75%,随着负载电压的增加,其传输效率逐渐降低,在最高传输功率时,其系统效率为88.04%。进一步地,当系统偏移100 mm时,其最高传输效率降低到88%以下。在MCC模态时,系统由半桥提供传输能量,此时其系统传输效率如图14所示,该模态时,系统的传输效率随着功率的增加逐渐降低。而在CV模态下,系统偏离谐振点较为严重,整体传输效率不高。
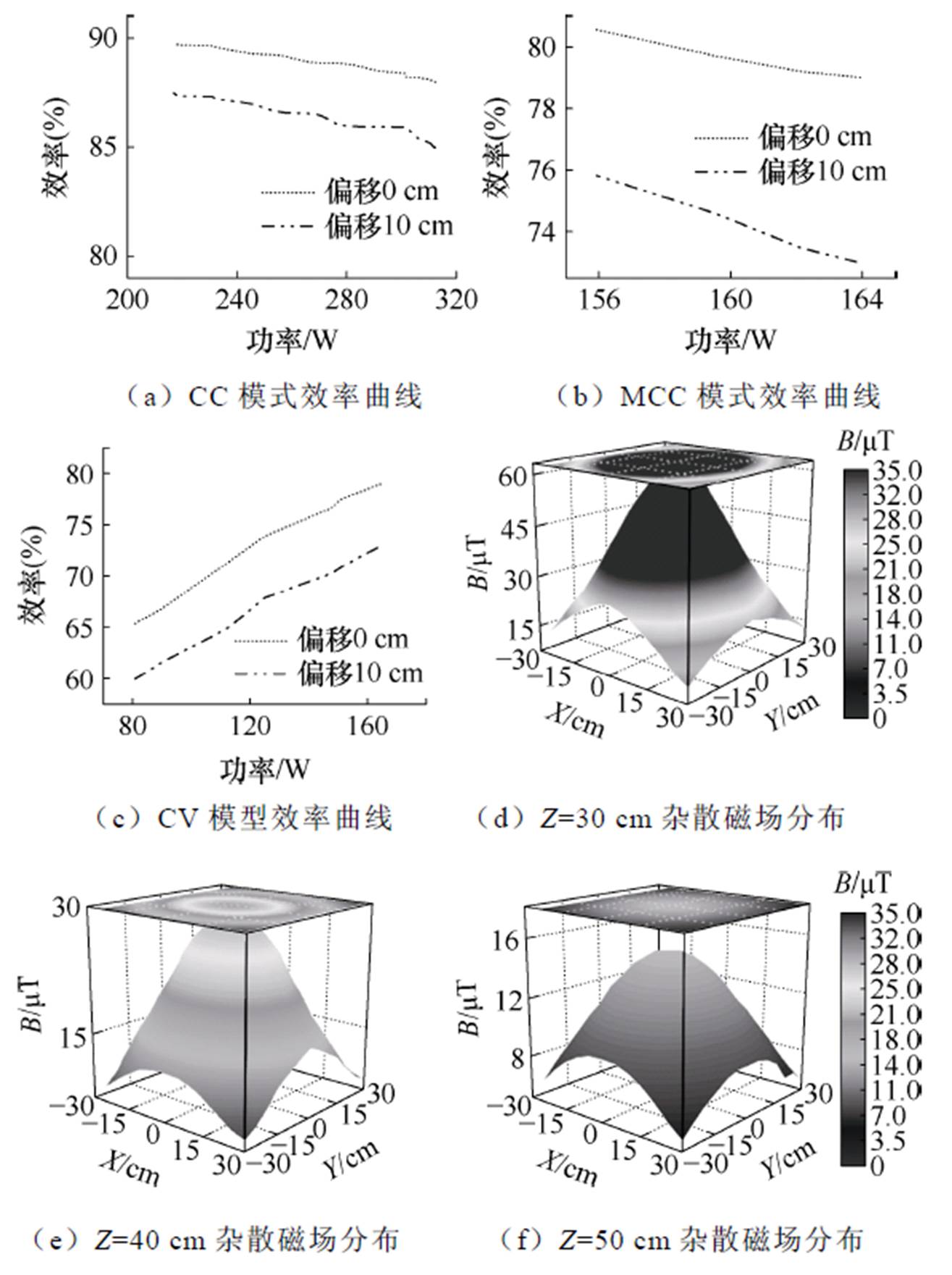
图14 效率曲线及杂散磁场分布
Fig.14 Efficiency and stray magnetic field diagram
设定“I工I”型磁耦合机构放置于Z=0的XY平面上。在下面的研究中,利用带有3 cm2传感器的HIOKI FT3470-52磁场测量仪,分别测量Z= 30 cm、Z=40 cm及Z=50 cm时XY平面上的磁通密度,并绘制了如图14d~图14f所示的杂散磁场分布特性。根据杂散磁场分布特性可知,距离发射平面越远,杂散磁场越小,杂散磁场的磁通密度峰值均出现在坐标零点,整体杂散磁场分布趋势接近有限元仿真分析结果。在距离发射线圈500 mm处,杂散磁场的磁通密度峰值约为15 mT。综上所述,本文所提“I工I”型磁耦合机构在±100 mm的偏移特性下运行良好,基于全桥半桥软切换的MCC-CV控制方案可有效解决模态切换时产生的输出电流振荡问题。
现有针对R-UAV无线充电系统的研究主要集中在磁耦合结构设计等方面,其对比见表3。
表3 R-UAV研究方案特性对比
Tab.3 The characteristic of R-UAV research
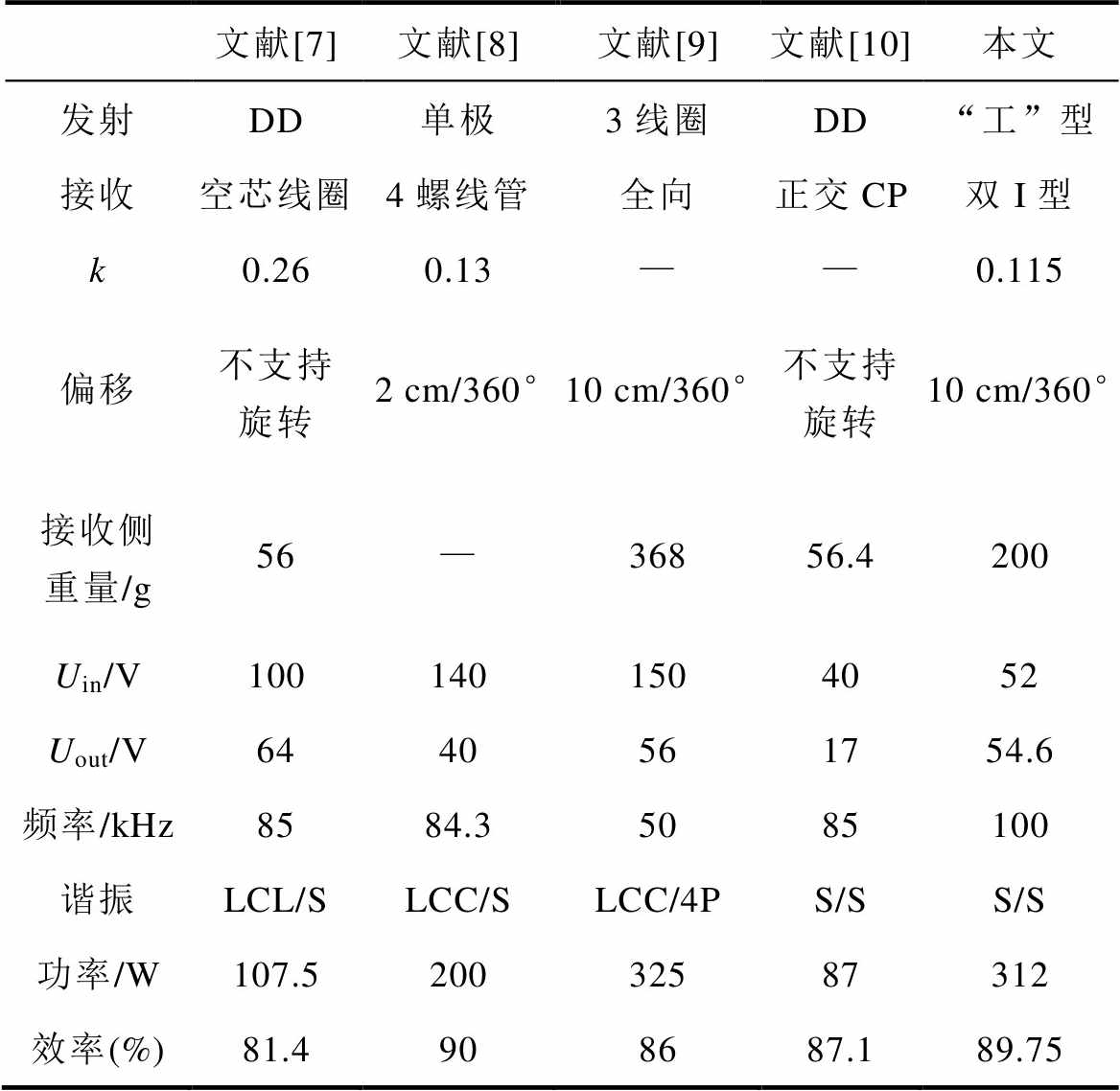
文献[7]文献[8]文献[9]文献[10]本文 发射DD单极3线圈DD“工”型 接收空芯线圈4螺线管全向正交CP双I型 k0.260.13——0.115 偏移不支持旋转2 cm/360°10 cm/360°不支持旋转10 cm/360° 接收侧重量/g56—36856.4200 Uin/V1001401504052 Uout/V6440561754.6 频率/kHz8584.35085100 谐振LCL/SLCC/SLCC/4PS/SS/S 功率/W107.520032587312 效率(%)81.4908687.189.75
文献[7]将DD结构作为发射线圈引入无人机无线充电系统,但接收侧为空芯线圈,效率较低。文献[10]则在接收侧增加屏蔽层,改进了上述结构,进一步提高了系统的传输效率。然而,文献[7, 10]中描述的结构都不能实现旋转偏移。文献[9]则利用全向接收结构实现较好的抗偏移特性,但由于副边采用4线圈接收方式,磁结构的重量较高,且系统传输效率较低。而文献[8]中描述的传输结构是单极CP线圈,具有很好的传输效率及旋转偏移性能。同时由图8可知,本文所述“工”型发射结构的杂散磁场远低于单极CP线圈。
综上所述,基于“I工I”型磁耦合机构构建的R-UAV无线充电系统与现有研究相比在保持无人机侧磁耦合结构质量较轻的同时具有更好的抗偏移性能、更高的传输效率及较低的杂散磁场分布特性。
本文提出了可适用于S-S谐振网络,且具有多阶段恒流软切换特性的控制策略。同时,结合UAV结构特性提出了具有高抗偏移、接收侧的零风阻及旋转适应性的“I工I”型磁耦合机构。针对“I工I”型磁耦合机构的研究主要集中在如下三个方面:首先,通过磁路分析确定了“工”型发射机构的高抗偏移与低杂散磁场特性机理。其次,调整I型分布方案,优化磁耦合机构的抗偏移性能。最后,构建了R-UAV侧无线充电系统总质量小于300 g的实验样机,所述结构达到89.5%的最高充电效率及1 W/g的UAV侧无线充电系统功率密度,实现了360°旋转及沿起落架100 mm的偏移性能。本文提出的“I工I”型磁耦合结构可应用于具有高轻量化及高抗偏移性能设计要求的无线充电系统中。
附 录
本文所述“I工I”型磁耦合机构在沿起落架具有较强的抗偏移性能,但垂直于起落架方向的抗偏移方案在本文的设计中是缺乏的。因此,可通过在“I工I”型磁耦合机构上加入圆台辅助定位结构使R-UAV在降落时利用自身重力特性完成辅助定位满足RTK系统精度的抗偏移,其具体结构如附图1a所示。
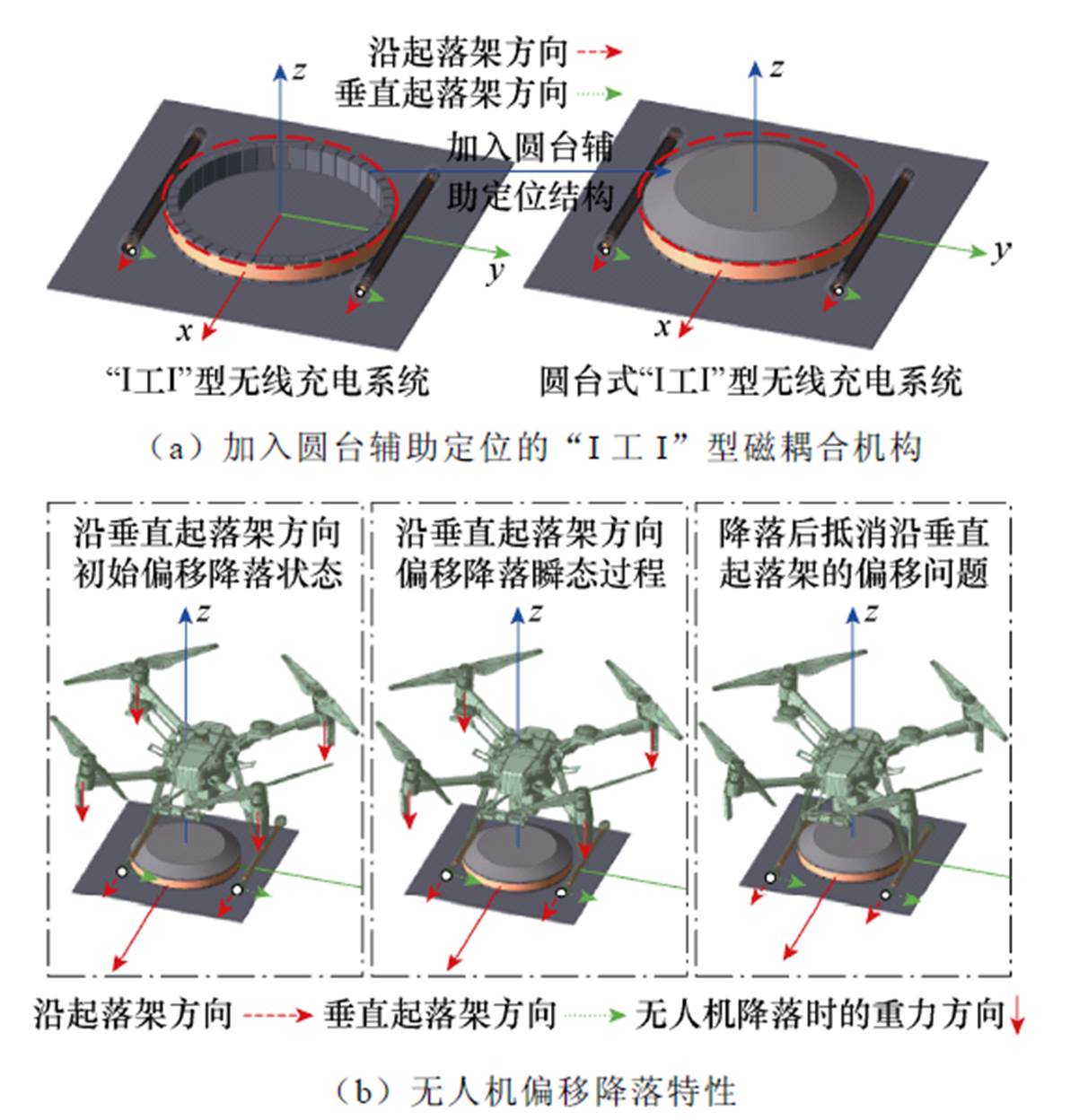
附图1 “I工I”型磁耦合机构3D模型
App.Fig.1 The 3D model for “I工I” magnetic structure
需要说明的是,当系统发生沿垂直于起落架方向偏移时,“I工I”型磁耦合机构在无人机降落的瞬间会发生如附图1b所示特性。在该特性的影响下,无人机可利用自身重力特性完成垂直于起落架方向的辅助定位。即本文所述磁耦合机构在实际应用中可通过如圆台辅助定位完成降落,进而不考虑垂直起落架方向的偏移。
参考文献
[1] 武帅, 蔡春伟, 陈轶, 等. 多旋翼无人机无线充电技术研究进展与发展趋势[J]. 电工技术学报, 2022, 37(3): 555-565.
Wu Shuai, Cai Chunwei, Chen Yi, et al. Research progress and development trend of multi-rotor unmanned aerial vehicles wireless charging tech- nology[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 555-565.
[2] 徐先峰, 吴慧玲, 杨雄政, 等. 空间约束下电动汽车无线充电系统磁耦合结构优化[J]. 电工技术学报, 2024, 39(12): 3581-3588.
Xu Xianfeng, Wu Huiling, Yang Xiongzheng, et al. Optimization of magnetically coupled structure of wireless charging system[J]. Transactions of China Electrotechnical Society, 2024, 39(12): 3581-358
[3] 蒋金橙, 王佩月, 冯天旭, 等. 基于准双向三态协同调度的无人车和无人机逐级式无线充电应用[J]. 电工技术学报, 2024, 39(22): 6965-6979.
Jiang Jincheng, Wang Peiyue, Feng Tianxu, et al. AGV and UAV stepwise wireless charging appli- cation based on quasi bidirectional three-state collaborative progressive method[J]. Transactions of China Electrotechnical Society, 2024, 39(22): 6965- 6979.
[4] 程志远, 宋晓逸, 吴晓婷, 等. 无线充电系统旋转式电磁耦合器损耗计算及热点温度研究[J]. 电工技术学报, 2024, 39(7): 1932-1942, 1956.
Cheng Zhiyuan, Song Xiaoyi, Wu Xiaoting, et al. Loss calculation and hot spot temperature study of rotary electromagnetic coupler in wireless charging system[J]. Transactions of China Electrotechnical Society, 2024, 39(7): 1932-1942, 1956.
[5] 陈永洪, 黎祎阳, 杨斌, 等. 基于多中继线圈结构的无线电能传输系统恒流/恒压输出方法[J]. 电力系统自动化, 2022, 46(20): 147-154.
Chen Yonghong, Li Yiyang, Yang Bin, et al. Constant-current/constant-voltage output method for wireless power transfer system based on multi-relay coil structure[J]. Automation of Electric Power Systems, 2022, 46(20): 147-154.
[6] Jayalath S, Khan A. Design, challenges, and trends of inductive power transfer couplers for electric vehicles: a review[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(5): 6196-6218.
[7] Duan Shijie, Zhang Hongzhi, Wang Yanan, et al. Unmanned aerial vehicle wireless power transfer system with light-weight and low leakage flux interference[C]//2022 IEEE International Power Electronics and Application Conference and Expo- sition (PEAC), Guangzhou, China, 2022: 1481-1485.
[8] Bie Zhi, Zhang Jiantao, Song Kai, et al. A free- rotation asymmetric magnetic coupling structure of UAV wireless charging platform with conformal pickup[J]. IEEE Transactions on Industrial Elec- tronics, 2022, 69(10): 10154-10161.
[9] Wu Shuai, Cai Chunwei, Liu Xichen, et al. Compact and free-positioning omnidirectional wireless power transfer system for unmanned aerial vehicle charging applications[J]. IEEE Transactions on Power Elec- tronics, 2022, 37(8): 8790-8794.
[10] Wu Shuai, Cai Chunwei, Jiang Longyun, et al. Unmanned aerial vehicle wireless charging system with orthogonal magnetic structure and position correction aid device[J]. IEEE Transactions on Power Electronics, 2021, 36(7): 7564-7575.
[11] 王维, 曾振炜, 王劼忞, 等. 输电杆塔无线供电系统非均匀多米诺单元性能分析与优化[J]. 电工技术学报, 2022, 37(17): 4315-4325.
Wang Wei, Zeng Zhenwei, Wang Jiemin, et al. Per- formance analysis and optimization of non-uniform domino unit in wireless power supply system of transmission tower[J]. Transactions of China Elec- trotechnical Society, 2022, 37(17): 4315-4325.
[12] Li Weihan, Zhang Qianfan, Cui Chao, et al. A self- tuning S/S compensation WPT system without parameter recognition[J]. IEEE Transactions on Industrial Electronics, 2022, 69(7): 6741-6750.
[13] Hong W, Lee Sangmin, Lee S H. Sensorless control of series-series tuned inductive power transfer system[J]. IEEE Transactions on Industrial Electronics, 2023, 70(10): 10578-10587.
[14] Wu Xiaogang, Xia Yinlong, Du Jiuyu, et al. Multistage constant current charging strategy based on multiobjective current optimization[J]. IEEE Transactions on Transportation Electrification, 2023, 9(4): 4990-5001.
[15] Iam I W, Ding Zhaoyi, Ieong C F, et al. Optimal bivariate control strategy of multistage constant current charging for IPT-based wireless electric vehicle charging[J]. IEEE Transactions on Trans- portation Electrification, 2024, 10(2): 4513-4528.
[16] Sha Deshang, Yang Xiao. Wide voltage input full bridge (FB)/half bridge (HB) morphing-based LLC DC-DC converter using numerical optimal trajectory control[J]. IEEE Transactions on Industrial Elec- tronics, 2023, 70(4): 3697-3707.
Abstract Rotor-unmanned aerial vehicles (R-UAV) have structural irregularities and problems with docking offset. The traditional unipolar CP magnetic structure increases the wind resistance of the R-UAV due to its mechanical structure characteristics, which, in turn, affects the flight stability of the R-UAV. At the same time, the asymmetric characteristics of the original secondary side can generate high stray magnetic fields, affecting the stable operation of the R-UAV. Therefore, applying the wireless charging system to R-UAVs is challenging. In order to build a stable wireless charging system for R-UAVs, it is necessary to conduct a targeted optimization design based on the mechanical structure of the R-UAV. This paper proposes an “I工I” magnetic structure with high anti-offset and low stray magnetic field constraints for the wireless charging system of R-UAVs and designs a multi-stage constant current-constant voltage (MCC-CV) control strategy with soft switching capability based on the characteristics of series-series (S-S) networks.
Firstly, this paper comprehensively analyzes the characteristics of series-series (S-S) networks, develops an MCC-CV control strategy for wireless charging of lithium batteries, and designs a full-bridge phase-shift soft-switching half-bridge workflow to solve the output current oscillation problem caused by the energy storage characteristics of the resonant network during the multi-stage constant current switching process. By incorporating soft switching capabilities, the system can transition smoothly between different stages of the charging process, minimizing current oscillations and ensuring a stable charging experience. Then, a three-dimensional model of the “I工I” magnetic structure is proposed and established. The transmission structure of this coupling structure is a “I工I” core, while the receiving side structure is an “I” core integrated within the landing gear of the R-UAV. Integrating the magnetic structure within the landing gear allows for zero wind resistance characteristics in wireless charging of R-UAV. Based on the low magnetic resistance characteristics of ferrite cores, the design of the “I” core is completed. Through magnetic circuit analysis and finite element simulations, the magnetic circuit shaping and low stray magnetic field characteristics of the “I” core are determined, and a passive constraint magnetic circuit shaping method for stray magnetic fields is derived. The “I” core distribution is adjusted to increase the anti-offset capability of the “I工I” magnetic structure, thereby achieving a high anti-offset wireless charging system design.
Finally, a prototype of the “I工I” magnetic structure is built. It is shown that the system can maintain a constant output current under radial offset of 100 mm and rotational offset of 360°, with only a 2% fluctuation in transmission efficiency. At the same time, the distribution characteristics of the stray magnetic field outside the launch platform are measured, and a distribution diagram of the stray magnetic field is drawn. The proposed “I工I” is lightweight and efficient.
keywords:Wireless charging system, “I工I” type magnetic structure, high anti-offset, stray magnetic field constraints
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.240804
国网江西省电网公司重大科技项目(SGJXJJ00XTJS2310580)和山西省应用基础研究计划项目(20210302123171)资助。
收稿日期 2024-05-16
改稿日期2024-06-17
张 云 男,1980年生,教授,博士生导师,研究方向为新能源电力电子功率变换系统、微电网及其运行控制技术及无线电能传输理论与应用。
E-mail: zhangy@tju.edu.cn(通信作者)
黄伟义 男,1994年生,博士研究生,研究方向为无线电能传输技术。
E-mail: hwymy@tju.edu.cn
(编辑 陈 诚)