 (1)
(1)
摘要 双三相永磁同步电机的缺相容错控制策略大多基于正弦电流模式展开研究,然而由于正弦电流模式这一附加约束,缩减了电流参考求解空间的大小,限制了电机容错性能的提升,因此该文针对这一问题做出改进。首先,向容错后的相电流中额外注入3次谐波,对最小铜耗与最大转矩控制策略的电流参考重新优化,改善了两种控制策略的容错效果。其次,综合考虑电机的定子铜耗与转矩输出能力,引入分配系数,将最小铜耗与最大转矩控制策略组合,提出了一种基于谐波注入的全转矩范围最小铜耗控制策略,得到了全转矩范围内电流参考的统一表达式,针对不同的负载工况,在线调节分配系数实现了容错切换轨迹的优化,在不牺牲输出负载范围的同时,有效降低了定子铜耗。最后,通过实验验证了该容错控制策略的有效性。
关键词:双三相永磁同步电机 缺相故障 容错控制 谐波注入 最小铜耗
双三相永磁同步电机(Dual Three-Phase Permanent Magnet Synchronous Motor, DTP-PMSM)凭借其功率等级高、转矩脉动小、可靠性强等优势[1-4],在电动汽车、船舶推进等领域的应用越加广泛[5-7]。DTP- PMSM因为相数冗余具有缺相容错性这一重要优势,其缺相容错控制策略被广泛研究。
文献[8]将包含故障相的整套三相绕组切除,DTP-PMSM退化为传统三相PMSM,仅三相绕组参与机电能量转换,转矩输出能力减半。文献[9]将故障后的电机视作一个整体,利用降维解耦实现了对电机的容错控制。然而,该控制策略针对不同的故障相需要改变解耦矩阵和控制结构,较为复杂。为了简化控制实现的过程,一些学者提出了基于解耦矩阵不变的容错控制策略。
文献[10-11]提出了最小铜耗(Minimum Loss, ML)和最大转矩(Maximum Torque, MT)控制策略,除故障相外的五相绕组皆参与机电能量转换,电机的容错性能得到了提升。两种控制策略在定子铜耗和转矩输出能力方面虽然各具优势,但无法同时兼顾,实际运行时要根据负载工况进行切换。MT控制策略虽然具有更宽的转矩输出范围,但并未考虑每个负载工况下定子铜耗的优化问题,因此全转矩范围最小铜耗(Full Range Minimum Loss, FRML)控制策略被进一步研究[12-15]。
FRML控制策略综合考虑了ML和MT两个优化目标,不仅可以实现与MT控制策略相同的转矩输出范围,还能实现定子铜耗的减少。文献[12]梯度增加目标转矩对电流参考分别求解,针对不同的负载工况建立了优化系数矩阵的查找表,监测负载工况实时调整优化系数矩阵,但由于系数数量多,建表量大,对控制器存储空间具有一定的要求。文献[13-14]采用相同思想,将FRML控制策略扩展至五相感应电机和九相永磁同步电机,控制策略在实现时同样需要建立多优化系数的查找表。文献[15]将ML和MT控制策略得到的优化系数根据负载工况的不同,按线性比例相加,最终得到了优化系数的闭环表达式。虽然简化了建表查表的过程,但对文献[12]理想的优化系数轨迹进行了线性近似,在铜耗优化效果上略差。
然而,文献[8-15]所提出的容错控制策略均基于正弦电流模式展开研究,容错后的相电流为正弦波。虽然简化了算法和实现过程,但对电机容错性能的提升有限。因此,文献[16]基于双dq坐标系向健康三相绕组中注入3次谐波,提高了MT控制策略的容错能力。文献[17-18]继续提高注入谐波的次数,分别对ML和MT控制策略进行优化。但随着注入谐波次数的增加,对电流控制器的带宽要求变高[18],不利于控制器的设计与调试[19]。并且现有的谐波注入容错控制策略大多只关注ML或MT单个优化目标,并未将全转矩范围的铜耗优化问题考虑在内。
针对传统正弦电流模式容错控制策略对电机容错性能优化不够充分的问题,本文提出了一种基于谐波注入的FRML控制策略。通过优化注入3次谐波的含量,ML和MT控制策略下电机的容错性能实现了进一步提升。引入分配系数KA,综合考虑ML和MT的优化目标,将两种控制策略进行非线性组合,根据负载工况的不同,仅需在线调整KA就可以实现容错轨迹的切换,简化了控制流程,并考虑了容错性能的权衡。相较于MT控制策略,在全转矩范围内可以实现电机定子铜耗更小的控制效果。最后搭建了DTP-PMSM实验平台,验证了所提控制策略对铜耗优化的有效性。
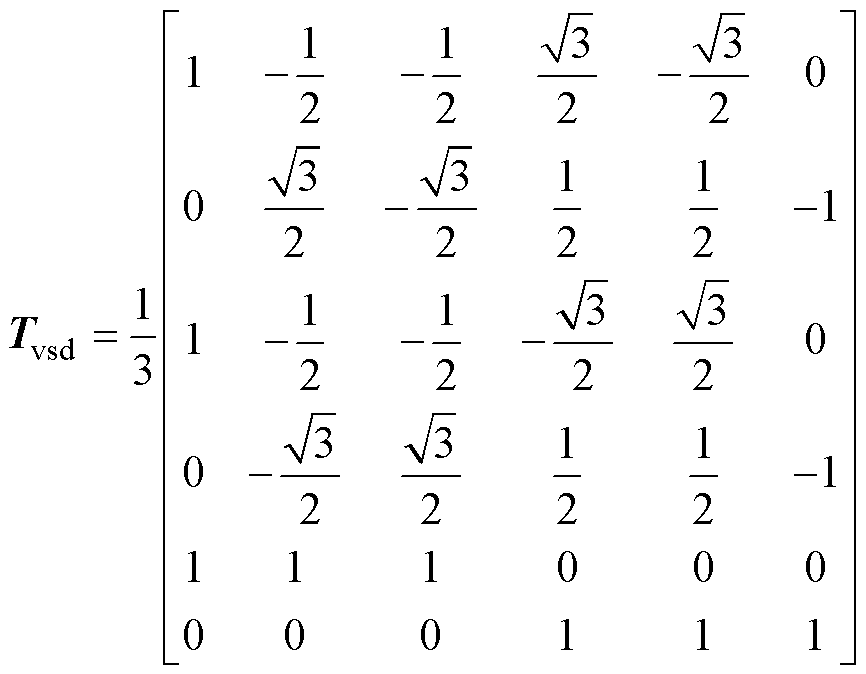
本文研究的表贴式DTP-PMSM两套绕组相移30°,且中性点隔离。根据矢量空间解耦变换理论,可以将静止坐标系下电机的各相电流分解至3个相互正交的ab、z1z2、o1o2平面[20-21]。解耦变换为
(1)
 (2)
(2)
式中,Tvsd为解耦变换矩阵;ia、ib 分别为ab 平面a、b 轴电流分量;iz1、iz2分别为z1z2平面z1轴、z2轴电流分量;io1、io2分别为o1o2平面o1轴、o2轴电流分量;iA、iB、iC、iD、iE、iF分别为A、B、C、D、E、F各相电流。
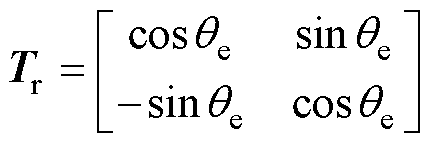
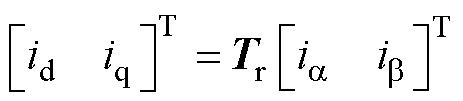
通过旋转坐标变换,可以将参与机电能量转换的ab 平面电流映射至dq平面,旋转坐标变换为
 (3)
(3)
 (4)
(4)
式中,Tr为旋转坐标变换矩阵; 为定子电角度;id、iq分别为dq平面电流分量。
为定子电角度;id、iq分别为dq平面电流分量。
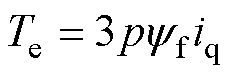
假设气隙磁场为理想正弦,忽略铁心磁饱和等非线性因素的影响,dq平面下电机的转矩方程可以表示为
 (5)
(5)
式中,Te为电机输出的电磁转矩;Ld为直轴电感;Lq为交轴电感;p为极对数; 为转子永磁体磁链的幅值。
为转子永磁体磁链的幅值。
由式(5)可知,Te可以分为两部分,一部分是由永磁体磁链产生的永磁转矩,另一部分是由于Ld与Lq不相等产生的磁阻转矩。表贴式电机Ld=Lq,磁阻转矩为0,因此转矩方程可简化为
 (6)
(6)
正弦电流模式令d轴参考电流 恒为0,虽然控制简单,但对电机容错性能的提升不够充分。因此,本文基于3次谐波注入,对传统ML与MT控制策略的电流参考进行优化。
恒为0,虽然控制简单,但对电机容错性能的提升不够充分。因此,本文基于3次谐波注入,对传统ML与MT控制策略的电流参考进行优化。
假设电机正常运行和容错运行时的转矩参考相同,皆为额定转矩,由式(6)可知,为了维持转矩
的稳定,容错运行时q轴的电流参考 可以表示为
可以表示为
 (7)
(7)
式中,TeN为额定转矩;IN为电机的额定电流。
静止坐标系下,电机容错运行相电流中的3次谐波可以通过解耦变换与旋转坐标变换映射成dq平面的2次谐波,因此容错运行时d轴的参考电流可以表示为
 (8)
(8)
式中,Kd决定了d轴2次谐波注入含量; 决定了d轴注入2次谐波的偏移角,均为需要优化的待定系数。
决定了d轴注入2次谐波的偏移角,均为需要优化的待定系数。
将(见式(8))、代入式(4),得到容错运行时ab 平面的电流参考 、
、 为
为
 (9)
(9)
当某一相发生缺相故障时,该相相电流被强制限制为0,ab、z1z2平面电流不再相互解耦,会额外引入新的约束条件。因为中性点隔离的连接方式,io1、io2始终为0。因此,将故障相相电流为0通过解耦反变换得到的约束条件可以表示为
 (10)
(10)
式中, 为故障相绕组与a 轴的夹角,当A~F相发生缺相故障时,分别对应0, 2p/3, -2p/3, p/6, 5p/6, -p/2。
为故障相绕组与a 轴的夹角,当A~F相发生缺相故障时,分别对应0, 2p/3, -2p/3, p/6, 5p/6, -p/2。
由式(10)可知,z1z2平面的电流参考 、
、 可由、线性组合表示为
可由、线性组合表示为
 (11)
(11)
式中,K1、K2、K3、K4为需要优化的待定系数。
将、、、通过解耦反变换可以得到容错运行时各相的表达式为
 (12)
(12)
式中,jK为K相绕组与a 轴的夹角;iK对应容错后的各相电流。
进而,容错运行时各相电流的有效值IK可以表示为
 (13)
(13)
在满足约束条件式(10)的情况下,各待定系数的解并不唯一,因此可以针对不同的优化目标对待定系数进行寻优以实现相应的容错性能。而优化目标主要可以分为电机定子铜耗最小和转矩输出能力最大两类,优化后分别对应ML和MT控制策略。
当优化目标为电机的定子铜耗最小时,目标函数FML可以表示为
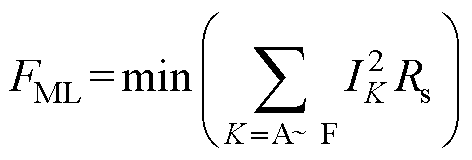 (14)
(14)
式中,Rs为电机定子电阻。
当优化目标为电机的转矩输出能力最大时,目标函数FMT可以表示为
 (15)
(15)
使用Matlab软件的优化实时编辑器对待定系数Kd、、K1、K2、K3、K4进行优化,选择用于解决多变量、有约束、非线性极值问题的fmincon求解器。设置Kd、K1、K2、K3、K4的约束边界为-1~1,设置的约束边界为-p ~p,待定系数的初值设置为约束边界的中值0。对ML和MT控制策略进行优化时分别设置目标函数如式(14)、式(15)所示。设置约束函数如式(10)所示,针对不同相发生缺相故障进行优化时,改变约束函数中的取值即可。优化后的系数见表1和表2。
表1 ML控制策略优化系数
Tab.1 Optimal coefficients for ML control strategy
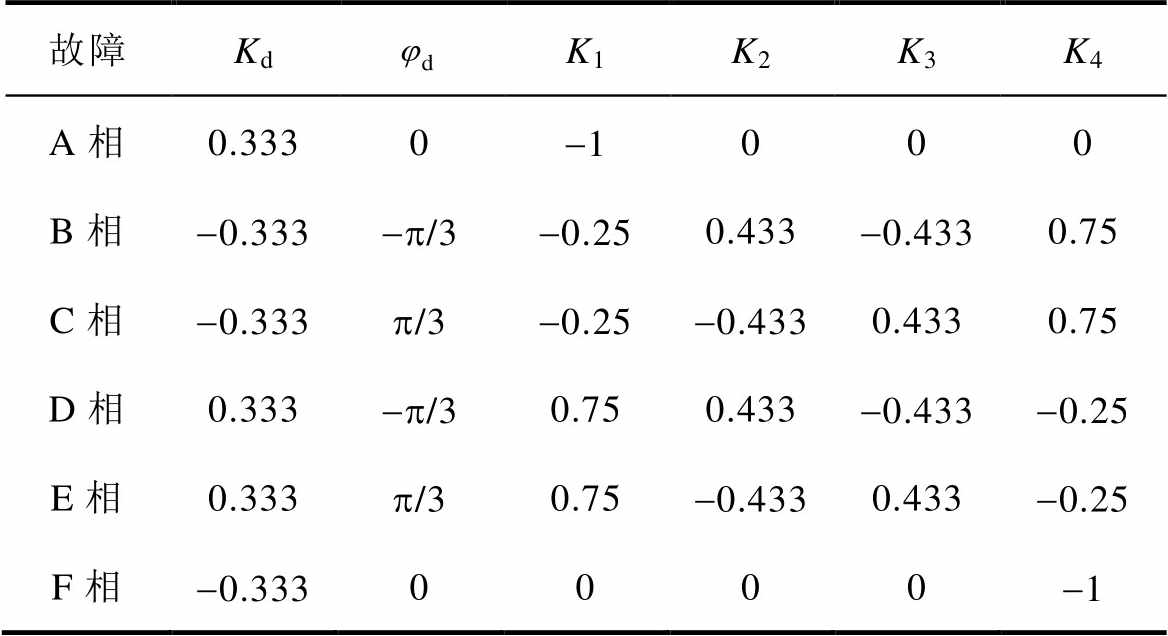
故障KdK1K2K3K4 A相0.3330-1000 B相-0.333-p/3-0.250.433-0.4330.75 C相-0.333p/3-0.25-0.4330.4330.75 D相0.333-p/30.750.433-0.433-0.25 E相0.333p/30.75-0.4330.433-0.25 F相-0.3330000-1
表2 MT控制策略优化系数
Tab.2 Optimal coefficients for MT control strategy
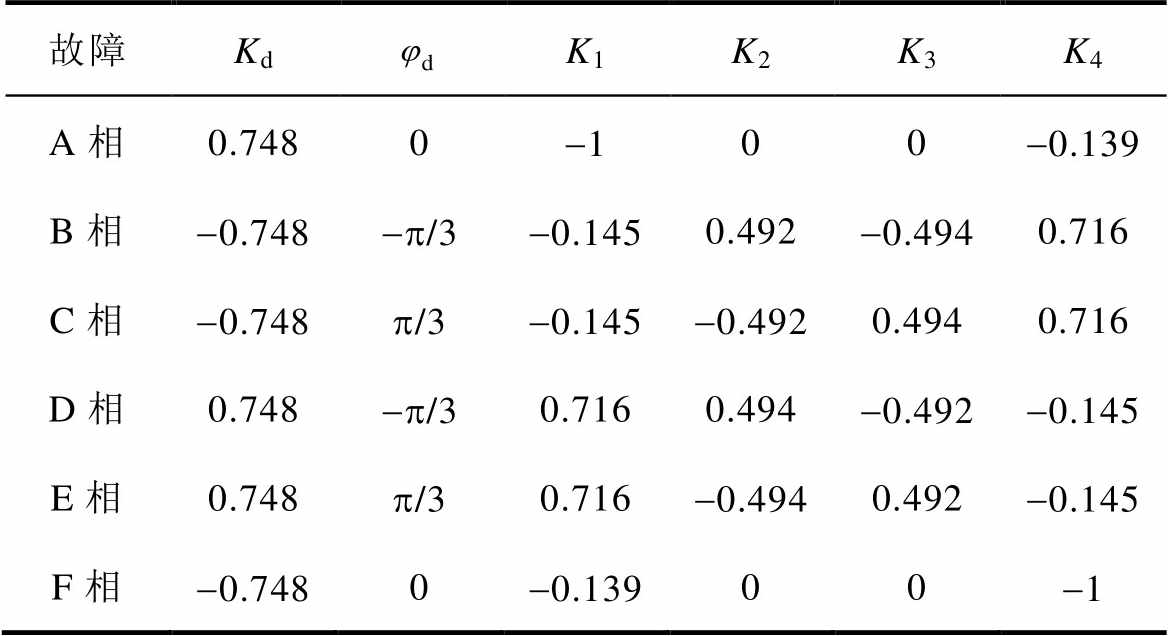
故障KdK1K2K3K4 A相0.7480-100-0.139 B相-0.748-p/3-0.1450.492-0.4940.716 C相-0.748p/3-0.145-0.4920.4940.716 D相0.748-p/30.7160.494-0.492-0.145 E相0.748p/30.716-0.4940.492-0.145 F相-0.7480-0.13900-1
以A相发生缺相故障为例,将优化后的待定系数代入式(7)、式(8)、式(11)中可以得到容错状态下dq平面与z1z2平面电流参考的表达式为
1)ML控制策略
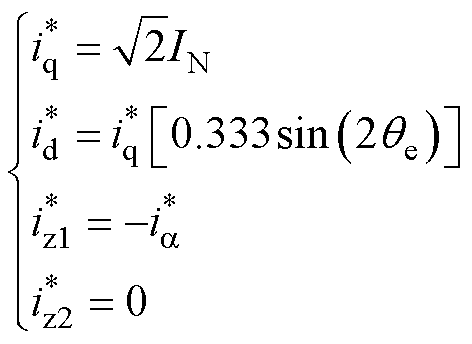 (16)
(16)
2)MT控制策略
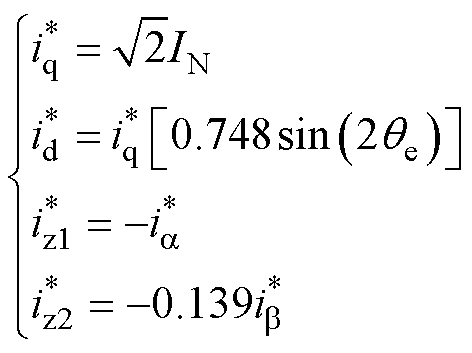 (17)
(17)
将式(16)、式(17)代入式(9)、式(12)中可以计算得到容错后相电流的表达式,将其同时除以进行标幺化可以得到3次谐波注入后的各相电流波形如图1所示。
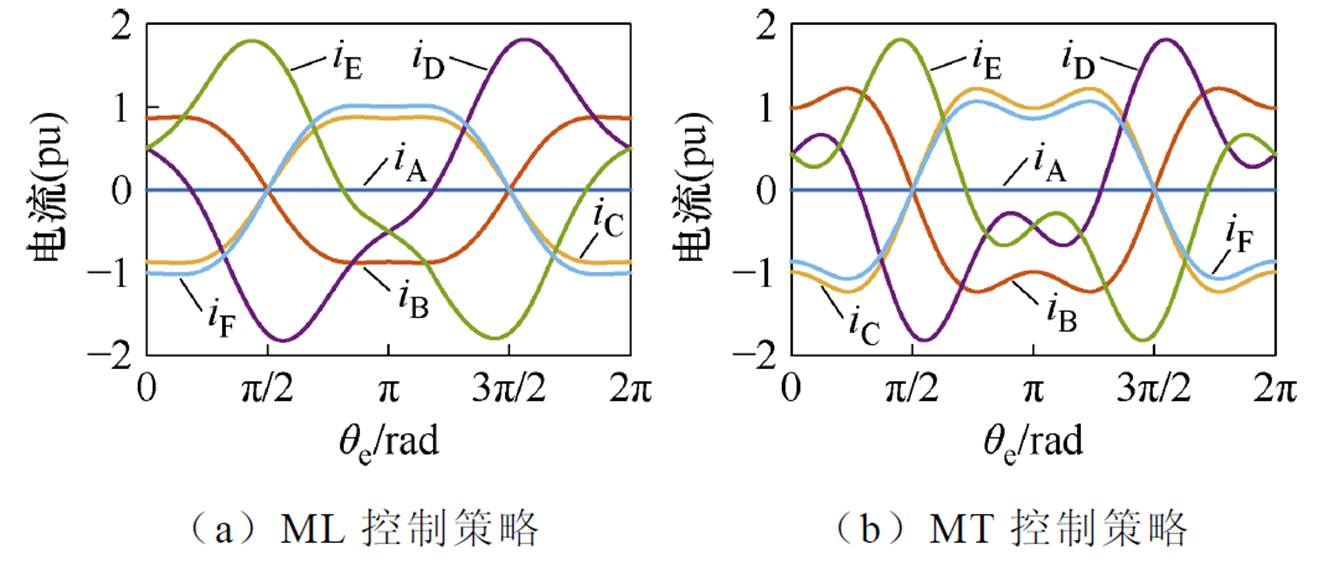
图1 3次谐波注入相电流波形
Fig.1 Phase current waveforms based on third harmonic current injection
为了防止电机绕组过热,电机容错运行时各相电流的有效值都应被限定在额定电流之内。因此,容错后电机的转矩输出能力Tc,可以在额定转矩TeN下由正常运行和容错运行时最大的相电流有效值之比计算得到,有
 (18)
(18)
由式(14)、式(18)可以计算得到,额外注入3次谐波对电流参考重新优化后,ML控制策略电机的定子铜耗为故障前的1.417倍,最大相电流有效值为故障前的1.585倍,进而可以得到电机容错运行时的转矩输出能力为63.1%。MT控制策略电机的定子铜耗为故障前的1.565倍,最大相电流有效值为故障前的1.405倍,进而可以得到电机容错运行时的转矩输出能力为71.2%。
3次谐波注入后,ML、MT控制策略电机的容错性能均得到了提升,因此在针对全转矩范围的铜耗优化问题时,基于谐波注入的容错控制策略更具优势。
为了进一步对比容错运行不同负载工况下的定子铜耗,定义转矩降额系数KT和铜耗降额系数KL为
 (19)
(19)
 (20)
(20)
 (21)
(21)
式中,PCuN为额定转矩下正常运行时电机的定子铜耗;PCuN-f为额定转矩下容错运行时电机的定子铜耗;KTmax为不同控制策略对应的最大转矩降额系数。
3次谐波注入后,ML控制策略的最大转矩降额系数KTmax-ML=0.631,MT控制策略的最大转矩降额系数KTmax-MT=0.712。KTmax-MT为容错运行允许的极限负载工况,当KT≤KTmax-ML时,采用ML控制策略可以始终保证电机的定子铜耗最小,但转矩输出范围受限,当KT继续增大时,为了满足负载工况的需求需要切换至MT控制策略。
实际运行中,针对不同的负载工况则以KTmax-ML为切换点,当KT≤KTmax-ML时定义为阶段1,采用ML控制策略,当KTmax-ML<KT≤KTmax-MT时定义为阶段2,切换至MT控制策略。两种策略对应的KT-KL曲线及切换轨迹如图2所示。
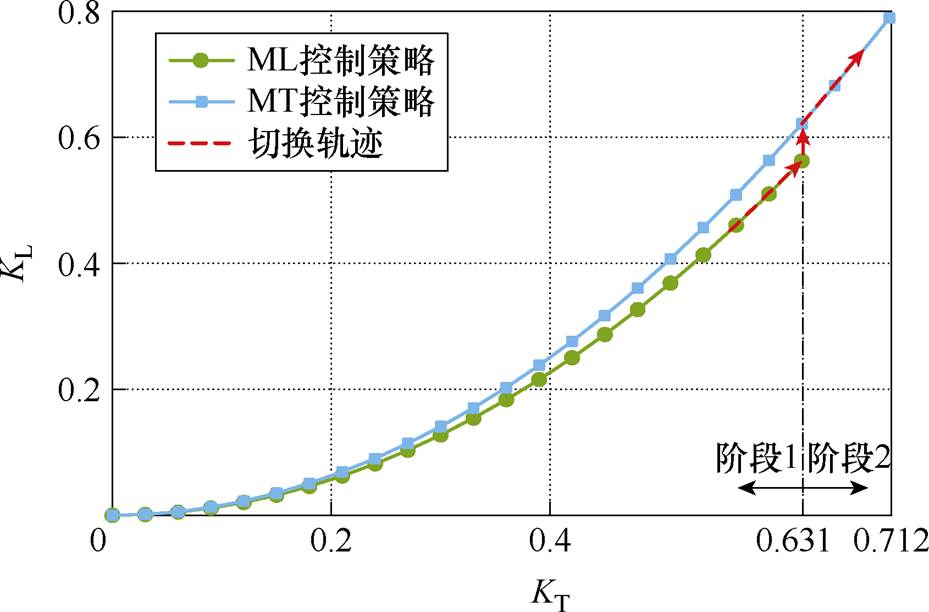
图2 ML和MT控制策略的KT-KL曲线及切换轨迹
Fig.2 KT-KL curves and switching trajectory of ML and MT control strategy
然而在阶段2内,MT控制策略并未针对负载工况的不同进行铜耗的优化,阶段1与阶段2切换时切换轨迹并非平滑的过渡而是发生了阶跃,恒采用MT控制策略无法实现全转矩范围内的铜耗最优,因此需要对切换轨迹进行改进。
仅考虑ML和MT控制策略时,无法同时兼顾定子铜耗和转矩输出能力。因此,本文采用组合分配的思想对电机的容错性能进行权衡。
仍然假设电机正常运行和容错运行时的转矩参考相同,皆为额定转矩TeN,此时引入分配系数KA,将实际的转矩参考等效为分配至ML和MT控制策略下转矩参考的组合为
 (22)
(22)
式中, 为分配至ML控制策略的转矩参考;
为分配至ML控制策略的转矩参考; 为分配至MT控制策略的转矩参考。
为分配至MT控制策略的转矩参考。
此时dq平面与z1z2平面的电流参考也为ML和MT控制策略下以KA为分配系数的电流参考的组合。以A相故障为例,由式(16)、式(17)组合计算可以得到容错状态下dq平面与z1z2平面电流参考的统一表达式为
 (23)
(23)
将式(23)代入式(14)、式(18)中可以得到KA不同取值时,额定转矩TeN下电机容错运行时的定子铜耗PCuN-f和转矩输出能力Tc。当KA=1时,电机的容错性能等效于ML控制策略;当KA=0时,电机的容错性能等效于MT控制策略。随着KA由1减小至0,电机的容错性能介于ML和MT控制策略之间。
以KA=0.5为例,此时 ,电机的定子铜耗为故障前的1.453倍,处于ML控制策略1.417倍与MT控制策略1.565倍之间。此时Tc= 67.7%,处于ML控制策略63.1%与MT控制策略71.2%之间,实现了ML与MT控制策略电机容错性能的权衡。
,电机的定子铜耗为故障前的1.453倍,处于ML控制策略1.417倍与MT控制策略1.565倍之间。此时Tc= 67.7%,处于ML控制策略63.1%与MT控制策略71.2%之间,实现了ML与MT控制策略电机容错性能的权衡。
额外考虑KA=0.5时对应的KT-KL曲线及切换轨迹如图3所示。
阶段1与阶段2仍以KTmax-ML为切换点,阶段1采用ML控制策略不变,而当KTmax-ML<KT时,电机不再由ML直接切换至MT控制策略,而是经由KA=0.5容错状态的过渡。由于KTmax-0.5=0.677,当KTmax-0.5<KT时电机再次切换至MT控制策略,令KA恒为0。
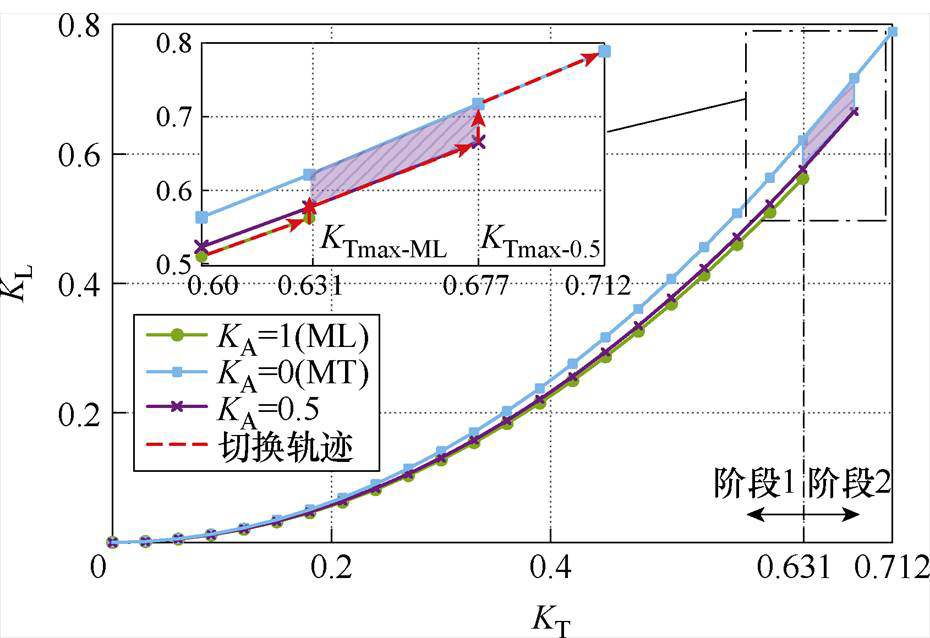
图3 考虑KA为0.5时的KT-KL曲线及切换轨迹
Fig.3 KT-KL curves and switching trajectory considering KA=0.5
在阶段2内,相较于恒采用MT控制策略,经由KA=0.5容错状态的过渡后,电机实现了定子铜耗的优化,图3中紫色阴影区域对应了定子铜耗优化量。
本文提出的谐波注入FRML控制策略进一步将KA属于0~1中的所有容错状态皆考虑在内,对切换轨迹进行改进。相较于MT控制策略,在不牺牲转矩输出范围的同时,实现了阶段2内所有负载工况的铜耗优化,此时对应的切换轨迹如图4所示。在阶段2内,谐波注入FRML控制策略电机容错运行时的定子铜耗始终更小,实现了全转矩范围铜耗优化的目的。图4中红色阴影区域对应了定子铜耗优化量。
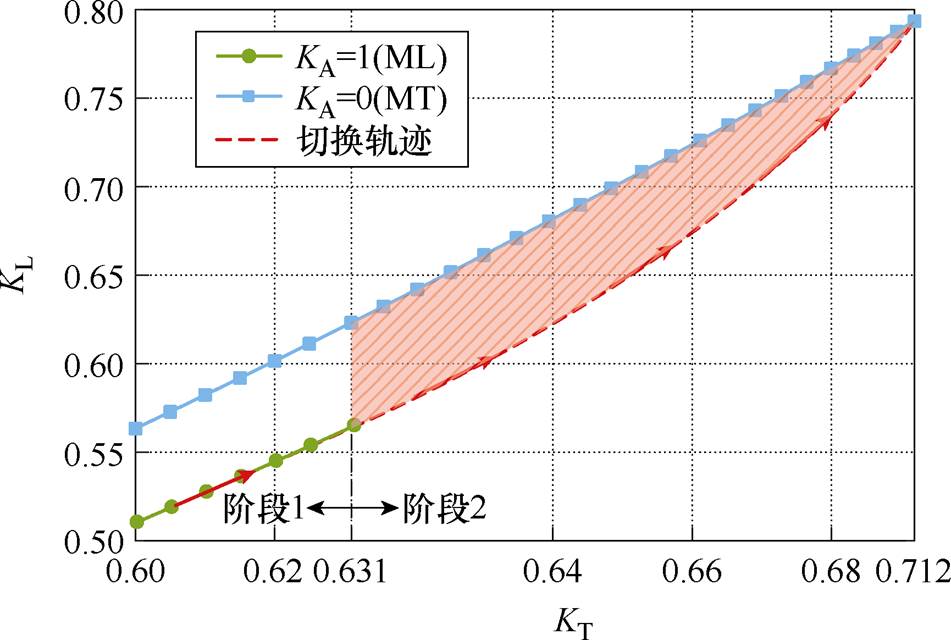
图4 谐波注入FRML控制策略的切换轨迹
Fig.4 Switching trajectory of FRML control strategybased on harmonic current injection
谐波注入FRML控制策略在阶段1内令KA恒为1,在阶段2内,每个KT都对应一个不同KA取值下的最大转矩降额系数,通过遍历KA的取值代入式(18)、式(21)中可以得到KT-KA曲线如图5所示,当0.631<KT时,KT与KA呈现为高阶非线性的对应关系。
在控制实现时,可以针对不同负载工况KT的需求,在控制器内存中建立相应的KT-KA查找表,随着KT的增大,通过不断改变分配系数KA、切换轨迹可以实现平滑的过渡,通过检测实际容错运行时的负载大小对KA进行在线调整,实现了全转矩范围铜耗优化的控制效果。
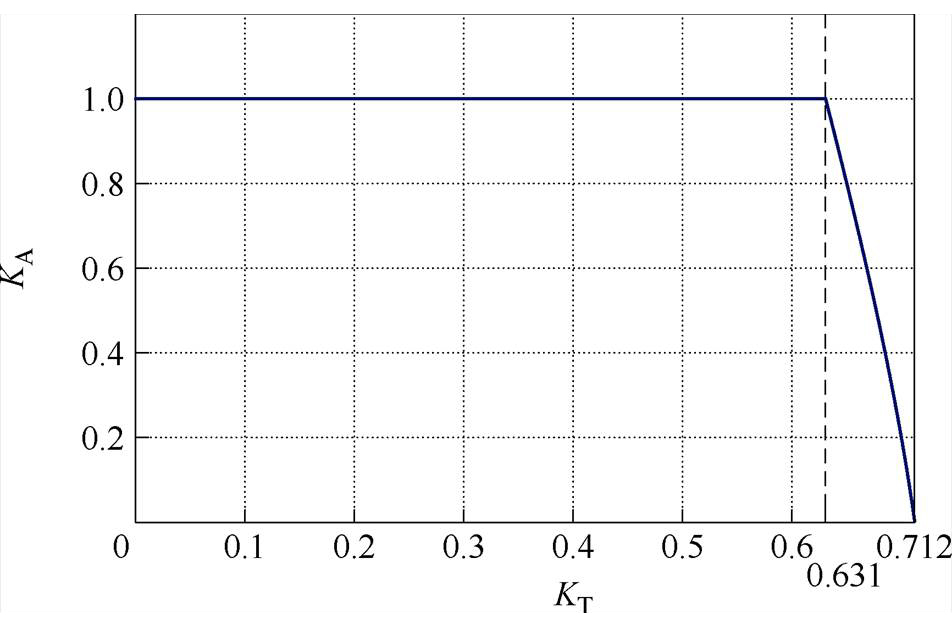
图5 谐波注入FRML控制策略KT-KA曲线
Fig.5 KT-KA curve of FRML control strategy based on harmonic current injection
为了进一步阐明所提控制策略的优势,将其与现有的正弦电流模式容错控制策略[10-12]、谐波注入容错控制策略[16-18]进行对比,见表3。对比时将PCuN-f除以正常额定运行的定子铜耗进行标幺表示。
表3 不同容错控制策略的定子铜耗与转矩输出能力
Tab.3 Stator copper loss and torque output capability for different fault-tolerant control strategies
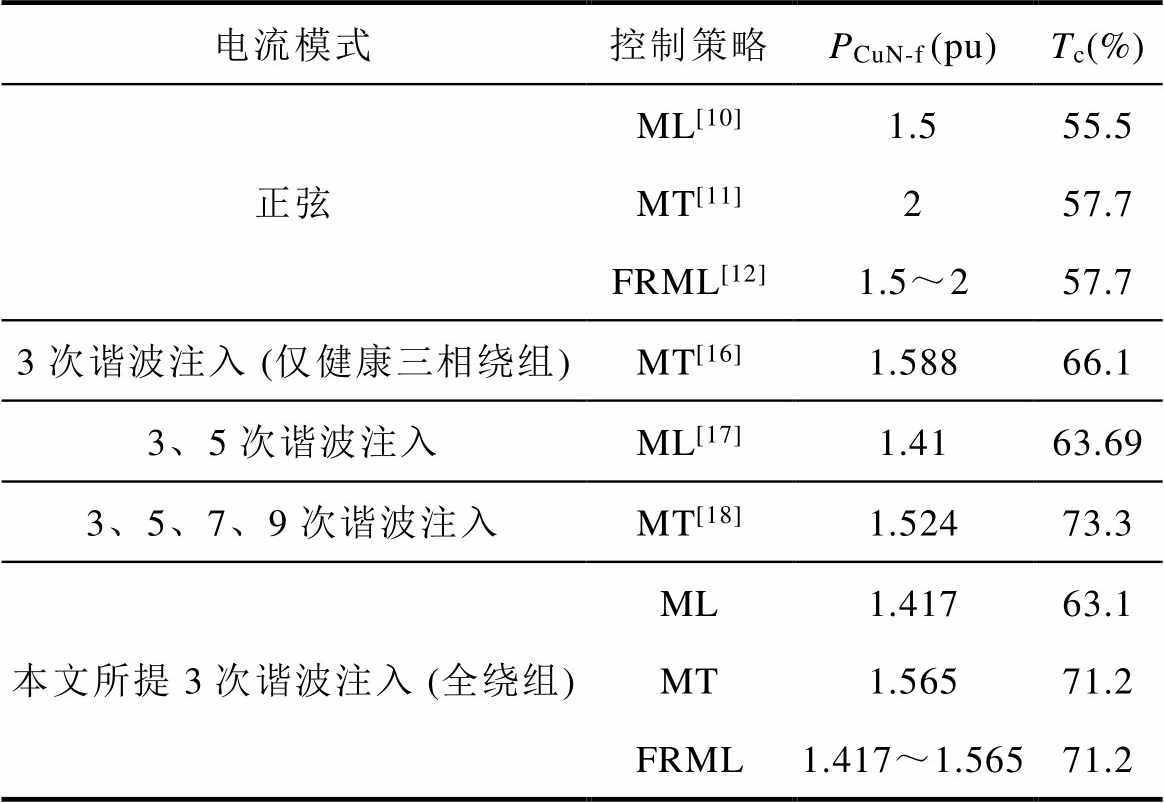
电流模式控制策略PCuN-f(pu)Tc(%) 正弦ML[10]1.555.5 MT[11]257.7 FRML[12]1.5~257.7 3次谐波注入 (仅健康三相绕组)MT[16]1.58866.1 3、5次谐波注入ML[17]1.4163.69 3、5、7、9次谐波注入MT[18]1.52473.3 本文所提3次谐波注入 (全绕组)ML1.41763.1 MT1.56571.2 FRML1.417~1.56571.2
相较于正弦电流模式,本文所提出的基于3次谐波注入的容错控制策略在定子铜耗和转矩输出能力方面均能实现更好的效果,提升较为明显。
而对比文献[16]可知,本文向除故障相外全部绕组中都注入了3次谐波,在不增加电流控制器带宽的同时,容错性能实现了进一步提升。文献[17]额外注入5次谐波,虽然提升了ML控制策略的容错能力,但对比可知提升效果并不明显。文献[18]提高注入谐波的次数至9次,虽然提升了MT控制策略的容错能力,但电流参考表达式复杂,与文献[17]一样,存在实现交流参考精确跟踪更为困难的问题。此外,文献[16-18]所提的容错控制策略仅关注于单一的优化目标,并未考虑负载工况不同时容错轨迹如何过渡切换的问题,使得对不同负载工况适应能力较弱,无法始终获得一个较好的容错性能。
现有FRML控制策略虽然考虑了不同转矩下的铜耗优化问题,但均基于正弦电流模式展开研究,优化的转矩范围较小,仅为2.2%,从平衡实现复杂程度和优化效果的角度而言,其优势不够显著。
随着注入谐波次数的增加,对容错性能的改善效果不再明显,而对电流控制器的带宽要求变高[17],控制更复杂[19]。因此,综合考虑控制实现的可行性和对容错性能的提升效果,本文所提出的FRML控制策略尽可能地减少了注入谐波的次数并考虑了ML和MT两个优化目标,将转矩优化范围扩宽至8.1%,在全转矩范围内皆能实现较优的容错效果。相较于文献[12]需要对多个优化系数建表查表的实现方法,所提FRML控制策略仅需更改分配系数KA便能实现容错轨迹的切换,减小了控制器的存储成本。
为了验证本文所提控制策略的有效性,搭建了DTP-PMSM平台进行实验验证,控制框图如图6所示。容错运行时控制器根据负载工况的不同读取建立的KT-KA查找表获得分配系数KA,q轴的电流参考由转速外环的输出获得,将KA代入式(23)中得到d轴,z1、z2轴电流参考。采用比例积分(Pro- portional Integral, PI)控制器对q轴电流参考值进行跟踪,采用准比例谐振(Quasi-Proportional Resonance, QPR)控制器+PI控制器[22]对d轴、z1、z2轴的交流电流参考值进行跟踪。
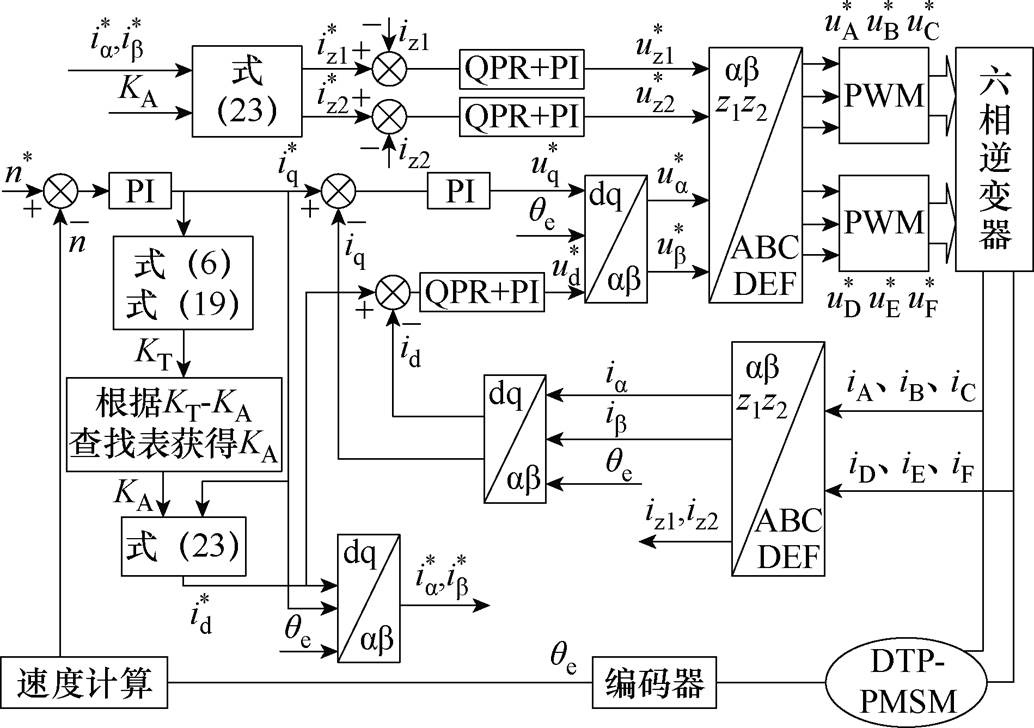
图6 谐波注入FRML控制策略控制框图
Fig.6 Block diagram of FRML control strategy based on harmonic current injection
实验平台如图7所示,该平台由DTP-PMSM、磁粉制动器、磁粉张力控制器、断路器、母排及电容、两组三相桥式逆变器和一个数字信号处理器组成。通过断路器模拟缺相故障,实验参数见表4。
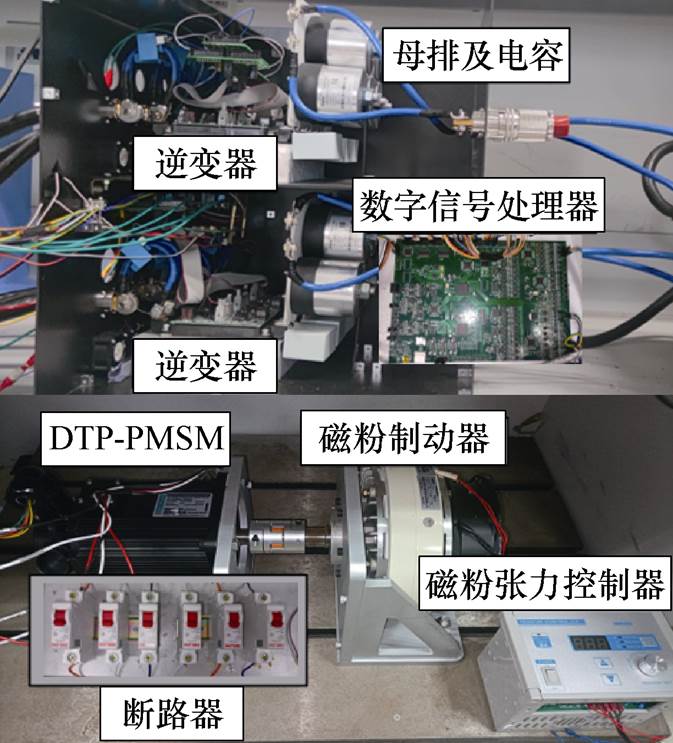
图7 DTP-PMSM实验平台
Fig.7 DTP-PMSM experimental platform
表4 实验参数
Tab.4 Experimental parameters
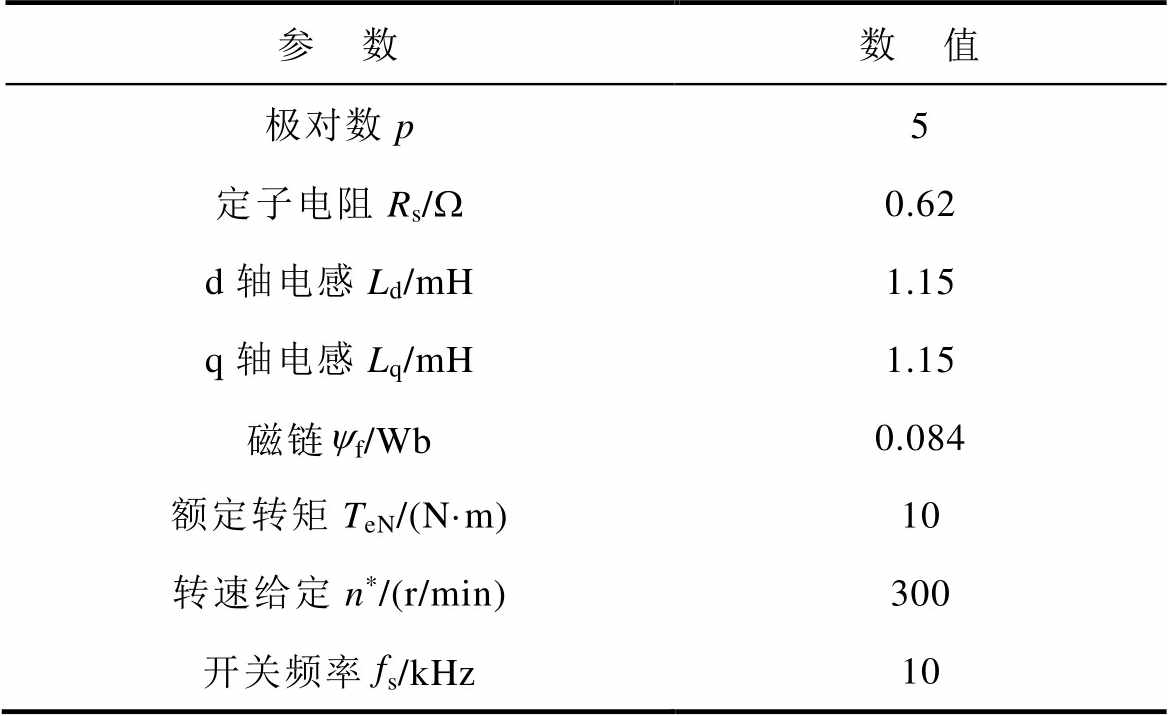
参 数数 值 极对数p5 定子电阻Rs/W0.62 d轴电感Ld/mH1.15 q轴电感Lq/mH1.15 磁链yf/Wb0.084 额定转矩TeN/(N·m)10 转速给定n*/(r/min)300 开关频率fs/kHz10
图8a为电机额定转矩TeN下正常运行时的相电流波形。图8b为电机正常额定运行时的转速n、转矩Te、最大相电流有效值Imax与定子铜耗PCu波形。由图8b可知,此时电机的定子铜耗为116 W,最大相电流有效值为5.65 A。
对3次谐波注入ML与MT控制策略进行了容错实验,以A相发生缺相故障容错运行为例。图9a与图9d为容错后的相电流波形,与图1的理论波形相对应。由图9b、图9c、图9e、图9f可知,QPR控制器对交流参考具有较好的跟踪效果,dq平面和z1z2平面的实际电流均能跟踪上其参考给定。
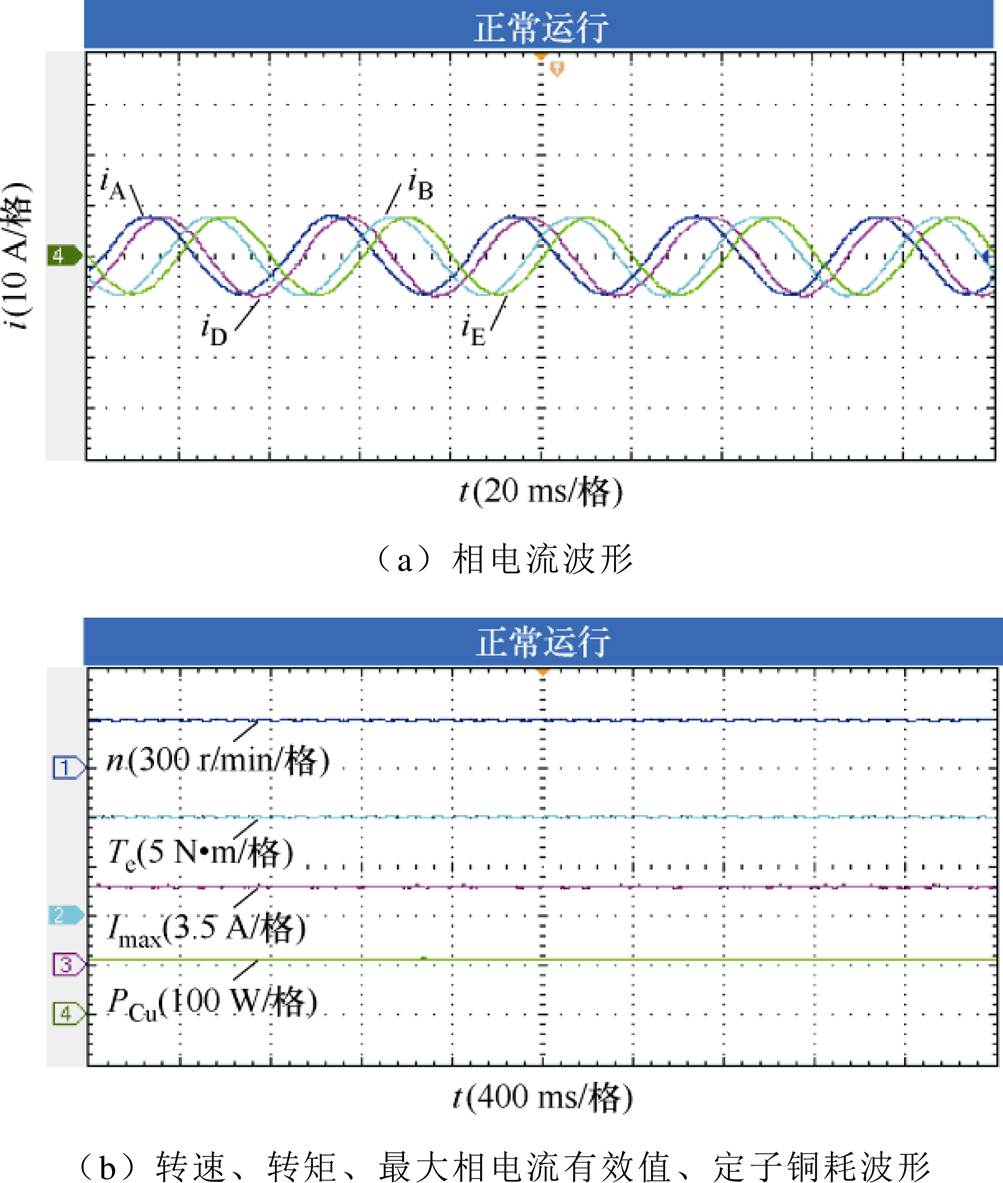
图8 正常运行实验波形
Fig.8 Experimental waveforms in normal operation
对正弦电流模式和3次谐波注入的ML与MT控制策略进行了容错性能对比实验,如图10所示,同样以A相发生缺相故障为例,实验负载工况均对应各容错控制策略理论允许的极限负载工况,KT分别等于0.555、0.577、0.631和0.712。

图9 3次谐波注入ML与MT控制策略容错实验波形
Fig.9 Experimental waveforms in fault-tolerant operation with ML and MT control strategies based on third harmonic current injection
如图10a所示,当KT=0.555时,采用正弦电流模式ML控制策略,容错运行时电机的定子铜耗由33.1 W增加至51 W,为正常运行时的1.54倍。容错运行时最大相电流有效值由3.16 A增加至5.62 A,为正常运行时的1.78倍,对应转矩输出能力为56.2%。
如图10b所示,当KT=0.577时,采用正弦模式MT控制策略,容错运行时电机的定子铜耗由37 W增加至75 W,为正常运行时的2.03倍。容错运行时最大相电流有效值由3.3 A增加至5.67 A,为正常运行时的1.72倍,对应转矩输出能力为58.2%。
如图10c所示,当KT=0.631时,采用3次谐波注入ML控制策略,容错运行时电机的定子铜耗由45 W增加至63.6 W,为正常运行时的1.413倍。容错运行时最大相电流有效值由3.55 A增加至5.66 A,为正常运行时的1.594倍,对应转矩输出能力为62.7%。
如图10d所示,当KT=0.712时,采用3次谐波注入MT控制策略,定子铜耗由57.8 W增加至91.5 W,为正常运行时的1.583倍。容错运行时最大相电流有效值由3.99 A增加至5.68 A,为正常运行时的1.424倍,对应转矩输出能力为70.2%。
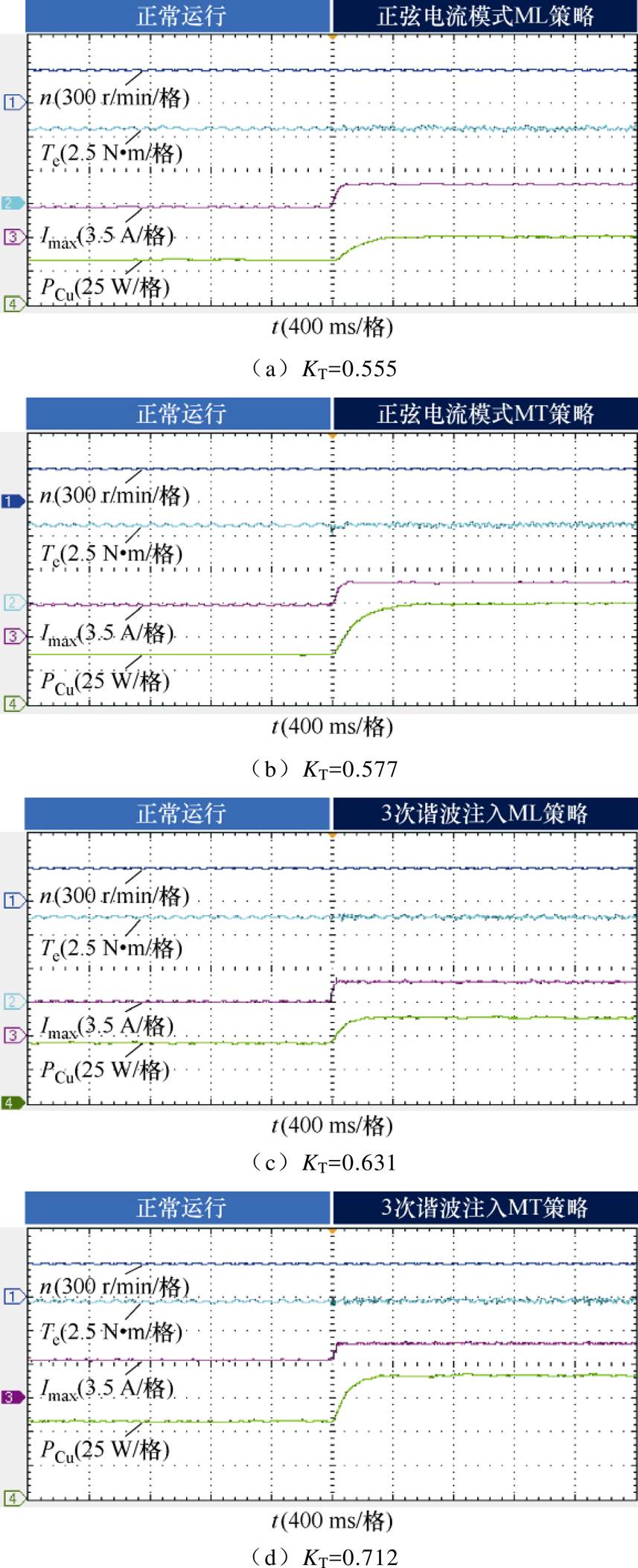
图10 正弦电流模式与3次谐波注入ML、MT控制策略对比实验波形
Fig.10 Comparison experimental waveforms between sinusoidal current pattern and third harmonic injection ML and MT control strategies
实验结果表明,相较于正弦电流模式,3次谐波注入后,ML与MT控制策略皆能实现更小的定子铜耗和更大的转矩输出能力,提升效果较为明显,与理论分析基本一致,证明了3次谐波注入对电机容错性能提升的有效性。
为了验证所提谐波注入FRML控制策略的有效性,进行了动态加载实验,KT由0.45增加至0.85。图11a为动态加载时的相电流波形,由图11b可知,分配系数KA随着负载工况的变化实时调整,变化趋势与理论分析基本一致。当0<KA<1时,最大相电流有效值Imax几乎不随负载的增大而增大,基本维持在5.7 A左右。
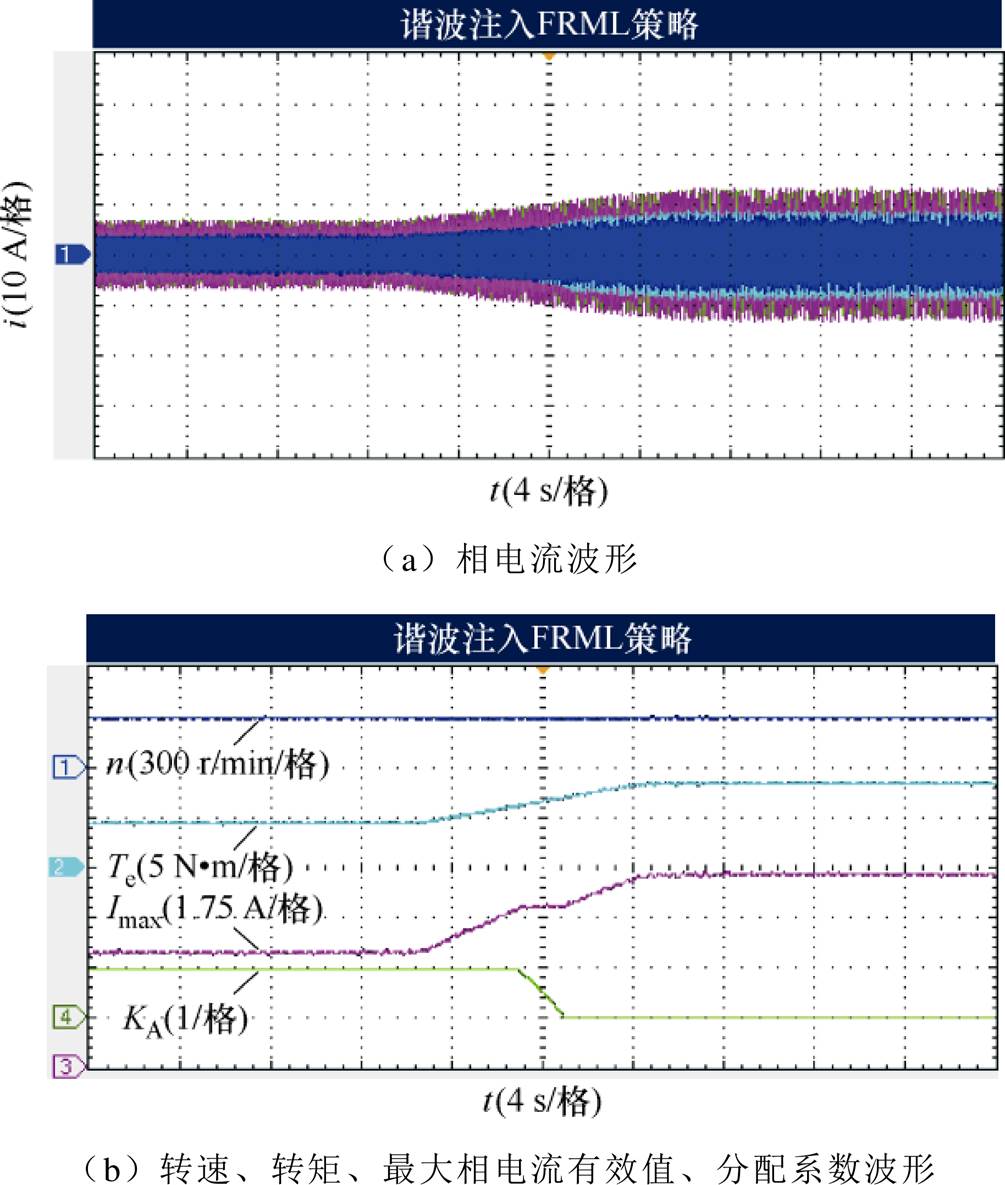
图11 谐波注入FRML控制策略动态加载实验波形
Fig.11 Experimental waveforms in dynamic loading operation with FRML control strategy based on harmonic current injection
当KT分别为0.655、0.677、0.697,对三个负载工况时进行了对比实验,实验结果如图12所示。
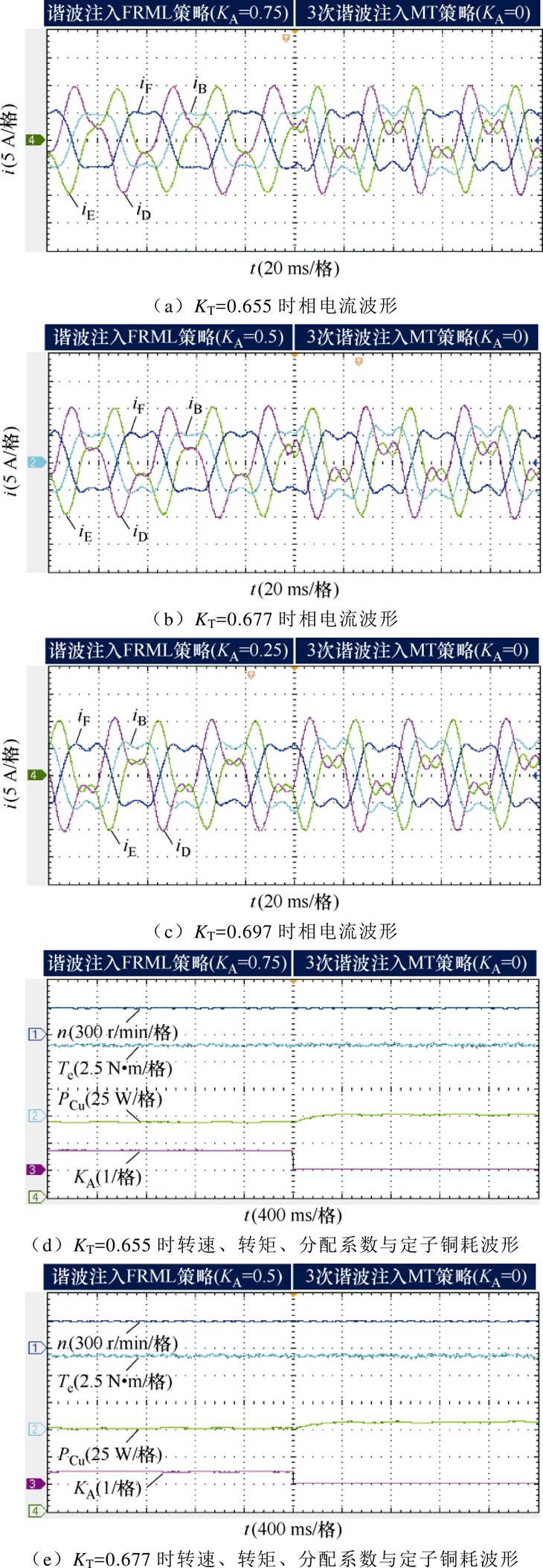
图12 谐波注入FRML与MT控制策略对比实验波形
Fig.12 Comparative experimental waveforms between FRML and MT control strategies based on harmonic current injection
采用谐波注入FRML控制策略时,KA随着KT的变化而变化,KA=0.75、0.5、0.25;采用3次谐波注入MT控制策略时,三个负载工况对应KA恒为0。对两种控制策略下的铜耗进行对比,如图12d~图12f所示,采用谐波注入FRML控制策略的铜耗始终更小。铜耗降低量除以电机正常运行时的额定铜耗可以得到铜耗优化率见表5,理论与实际基本对应,验证了所提谐波注入FRML控制策略对铜耗优化的有效性。
表5 谐波注入FRML控制策略定子铜耗优化率
Tab.5 Optimization ratio of stator copper loss with FRML control strategy based on harmonic current injection
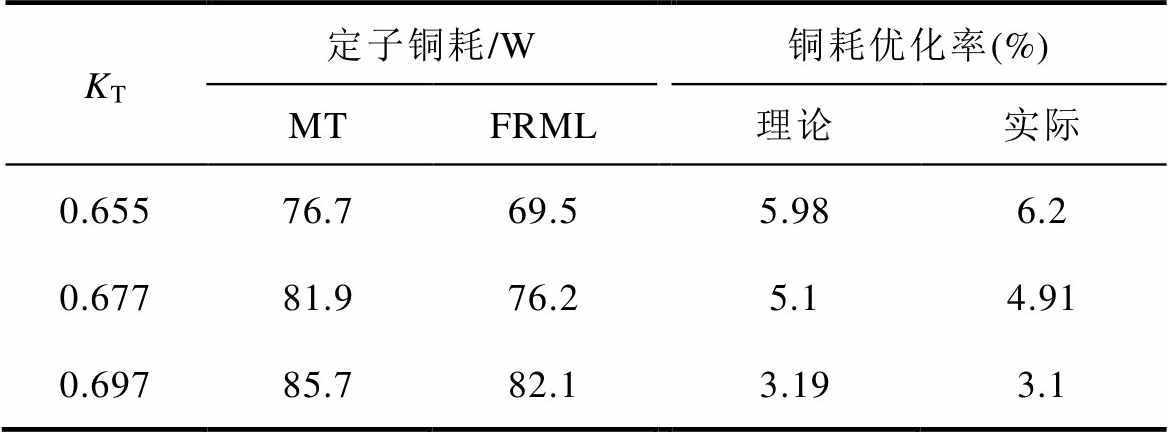
KT定子铜耗/W铜耗优化率(%) MTFRML理论实际 0.65576.769.55.986.2 0.67781.976.25.14.91 0.69785.782.13.193.1
本文针对DTP-PMSM提出了一种基于谐波注入的FRML缺相容错控制策略。
首先,以ML和MT为目标函数,向相电流中注入3次谐波,对电流参考重新优化。相较于正弦电流模式,电机的容错性能实现了提升。其次,将ML、MT控制策略相结合,建立了全转矩范围内电流参考的统一表达式,监测实际负载在线调节KA即可实现容错状态的切换,解决了仅考虑单一优化目标,对不同负载工况适应能力弱,无法始终获得一个较好容错性能的问题。相比于MT控制策略,FRML控制策略在不影响转矩输出范围的同时,实现了铜耗的优化。最后通过实验验证了多个负载工况下的铜耗优化率,证实了所提控制策略的正确性与有效性。结论如下:
1)以ML和MT为目标函数,向相电流中注入3次谐波,对电流参考重新优化。相较于正弦电流模式,电机的容错性能实现了提升。
2)将ML、MT控制策略相结合,建立了全转矩范围内电流参考的统一表达式,监测实际负载在线调节KA即可实现容错状态的切换,解决了仅考虑单一优化目标,对不同负载工况适应能力弱,无法始终获得一个较好容错性能的问题。
3)相比于MT控制策略,FRML控制策略在不影响转矩输出范围的同时,实现了铜耗的优化,并通过实验验证了多个负载工况下的铜耗优化率,证实了所提控制策略的正确性与有效性。
本文以DTP-PMSM为应用对象展开研究,如何将所提控制策略应用于其他多相电机将是接下来研究的重点。与此同时,所提缺相容错控制策略仅适用于表贴式电机,如何将其拓展至内置式电机值得进一步研究。
参考文献
[1] 陶涛, 赵文祥, 程明, 等. 多相电机容错控制及其关键技术综述[J]. 中国电机工程学报, 2019, 39(2): 316-326, 629.
Tao Tao, Zhao Wenxiang, Cheng Ming, et al. Review on fault-tolerant control of multi-phase machines and their key technologies[J]. Proceedings of the CSEE, 2019, 39(2): 316-326, 629.
[2] 刘自程, 李永东, 郑泽东. 多相电机控制驱动技术研究综述[J]. 电工技术学报, 2017, 32(24): 17-29.
Liu Zicheng, Li Yongdong, Zheng Zedong. Control and drive techniques for multiphase machines: a review[J]. Transactions of China Electrotechnical Society, 2017, 32(24): 17-29.
[3] Levi E, Barrero F, Duran M J. Multiphase machines and drives-revisited[J]. IEEE Transactions on Indu- strial Electronics, 2016, 63(1): 429-432.
[4] 孙嘉伟, 郑泽东, 李驰, 等. 对称型多相电机断相容错运行下的电流谐波分析与补偿[J]. 电工技术学报, 2022, 37(21): 5424-5434.
Sun Jiawei, Zheng Zedong, Li Chi, et al. Analysis and compensation of current harmonics in symmetrical multiphase machines in fault-tolerant operation against open-phase faults[J]. Transactions of China Electrotechnical Society, 2022, 37(21): 5424- 5434.
[5] 孙玉华, 赵文祥, 吉敬华, 等. 高转矩性能多相组永磁电机及其关键技术综述[J]. 电工技术学报, 2023, 38(6): 1403-1420.
Sun Yuhua, Zhao Wenxiang, Ji Jinghua, et al. Overview of multi-star multi-phase permanent magnet machines with high torque performance and its key technologies[J]. Transactions of China Electrotech- nical Society, 2023, 38(6): 1403-1420.
[6] Barrero F, Duran M J. Recent advances in the design, modeling, and control of multiphase machines: part I[J]. IEEE Transactions on Industrial Electronics, 2016, 63(1): 449-458.
[7] 王晓姬, 王道涵, 王柄东, 等. 电动汽车驱动/充电一体化系统及其控制策略综述[J]. 电工技术学报, 2023, 38(22): 5940-5958.
Wang Xiaoji, Wang Daohan, Wang Bingdong, et al. A review of drive-charging integrated systems and control strategies for electric vehicles[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(22): 5940-5958.
[8] Lin F J, Hung Y C, Tsai M T. Fault-tolerant control for six-phase PMSM drive system via intelligent complementary sliding-mode control using TSKFNN- AMF[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5747-5762.
[9] 杨金波, 李铁才, 杨贵杰. 一相开路双三相永磁同步电机建模与控制[J]. 电工技术学报, 2011, 26(10): 167-173, 187.
Yang Jinbo, Li Tiecai, Yang Guijie. Modeling and control of dual three-phase PMSM with one open phase[J]. Transactions of China Electrotechnical Society, 2011, 26(10): 167-173, 187.
[10] Che Hang seng, Duran M J, Levi E, et al. Postfault operation of an asymmetrical six-phase induction machine with single and two isolated neutral points[J]. IEEE Transactions on Power Electronics, 2014, 29(10): 5406-5416.
[11] 周长攀, 杨贵杰, 苏健勇, 等. 基于正常解耦变换的双三相永磁同步电机缺相容错控制策略[J]. 电工技术学报, 2017, 32(3): 86-96.
Zhou Changpan, Yang Guijie, Su Jianyong, et al. The control strategy for dual three-phase PMSM based on normal decoupling transformation under fault con- dition due to open phases[J]. Transactions of China Electrotechnical Society, 2017, 32(3): 86-96.
[12] Baneira F, Doval-Gandoy J, Yepes A G, et al. Control strategy for multiphase drives with minimum losses in the full torque operation range under single open- phase fault[J]. IEEE Transactions on Power Elec- tronics, 2017, 32(8): 6275-6285.
[13] 刘海涛, 易新强, 王东, 等. 五相感应电机缺相容错运行的全转矩范围效率优化控制策略[J]. 中国电机工程学报, 2020, 40(5): 1642-1653.
Liu Haitao, Yi Xinqiang, Wang Dong, et al. An efficiency-optimized control strategy in the full torque operation range for five-phase induction motor under open-circuited fault conditions[J]. Proceedings of the CSEE, 2020, 40(5): 1642-1653.
[14] 李修东, 郑晓钦, 王海峰, 等. 最大转矩范围内九相永磁同步电机缺相容错运行铜耗优化策略[J]. 电工技术学报, 2022, 37(17): 4355-4363.
Li Xiudong, Zheng Xiaoqin, Wang Haifeng, et al. Copper loss optimization strategy for nine-phase permanent magnet synchronous motors fault-tolerant operation in maximum torque range[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4355-4363.
[15] Yang Guanghui, Hussain H, Li Sheng, et al. A unified fault-tolerant strategy for multiphase machine with minimum losses in full torque operation range based on closed-form expressions[J]. IEEE Transactions on Power Electronics, 2022, 37(10): 12463-12473.
[16] Wang Wei, Zhang Jinghao, Cheng Ming, et al. Fault- tolerant control of dual three-phase permanent- magnet synchronous machine drives under open- phase faults[J]. IEEE Transactions on Power Elec- tronics, 2017, 32(3): 2052-2063.
[17] Wang Xueqing, Wang Zheng, He Mingzhi, et al. Fault-tolerant control of dual three-phase PMSM drives with minimized copper loss[J]. IEEE Transa- ctions on Power Electronics, 2021, 36(11): 12938- 12953.
[18] Jin Luhan, Mao Yao, Wang Xueqing, et al. Optimization- based maximum-torque fault-tolerant control of dual three-phase PMSM drives under open-phase fault[J]. IEEE Transactions on Power Electronics, 2023, 38(3): 3653-3663.
[19] Geng Qiang, Li Zhongchen, Wang Huimin, et al. Natural fault-tolerant control with minimum copper loss in full torque operation range for dual three- phase PMSM under open-circuit fault[J]. IEEE Transactions on Power Electronics, 2024, 39(1): 1279-1291.
[20] Hu Yashan, Zhu Z Q, Odavic M. Comparison of two-individual current control and vector space decomposition control for dual three-phase PMSM[J]. IEEE Transactions on Industry Applications, 2017, 53(5): 4483-4492.
[21] 周长攀, 刘海峰, 景国秀, 等. 双三相永磁同步电机缺相容错运行虚拟矢量间接修正方法及其在直接转矩控制中应用[J]. 电工技术学报, 2023, 38(2): 451-464.
Zhou Changpan, Liu Haifeng, Jing Guoxiu, et al. The indirect correction method of virtual vectors for dual three-phase permanent magnet synchronous motors under the open-phase fault and its application in the direct torque control[J]. Transactions of China Elec- trotechnical Society, 2023, 38(2): 451-464.
[22] 周长攀, 刘海峰, 景国秀, 等. 非正弦反电势五相永磁同步电机容错矢量控制[J]. 电气工程学报, 2021, 16(4): 108-119.
Zhou Changpan, Liu Haifeng, Jing Guoxiu, et al. Fault-tolerant vector control of five-phase permanent magnet synchronous motor of non-sinusoidal back EMF[J]. Journal of Electrical Engineering, 2021, 16(4): 108-119.
Abstract Due to the advantages of high power level, small torque ripple, and strong reliability, dual three-phase permanent magnet synchronous motors (DTP-PMSM) have been widely used in electric vehicles, ship propulsion, and aerospace power systems. The high fault-tolerant capability for open-phase faults is an important application feature of DTP-PMSM. Developing fault-tolerant control strategies is crucial for improving fault-tolerant performance. While both the minimum loss (ML) and maximum torque (MT) control strategies offer their advantages, stator copper loss and torque output capacity cannot be simultaneously considered. The full range minimum loss (FRML) control strategy comprehensively considers both ML and MT optimization objectives. The stator copper loss is effectively reduced without sacrificing the output torque range. Currently, the FRML control strategies usually add the restriction of sinusoidal current mode. However, the restriction of the sinusoidal current mode narrows the solution space of the current reference and prevents further improvement of the fault-tolerant performance. Therefore, a FRML control strategy based on harmonic current injection is proposed.
Firstly, considering the control complexity and optimization effect, third harmonics are injected into the fault-tolerant phase current to expand the solution space. By optimizing the current references, the fault-tolerant performance of ML and MT control strategies is further improved. Secondly, considering the stator copper loss and torque output capacity holistically, an allocation coefficient is introduced to combine the ML and MT strategies nonlinearly. The fault-tolerant trajectory can be smoothly switched online by adjusting the allocation coefficient under various load conditions. The proposed FRML control strategy simplifies the implementation complexity and produces a unified expression of current reference, which effectively reduces stator copper loss over the torque range. Finally, the proposed control strategy is verified on a surface-mounted DTP-PMSM platform. The quasi-proportional resonance controllers ensure accuracy in tracking the AC current reference. Both ML and MT control strategies achieve smaller stator copper loss and larger torque output capacity after the third harmonic injection than the sinusoidal current mode. When the FRML control strategy based on harmonic current injection is applied, the allocation coefficient is modified in real-time with the change of load condition. Under the rated load of 65.5%, 67.7%, and 69.7%, the stator copper loss is lowered by 6.2%, 4.91%, and 3.1%, respectively, compared to the MT control strategy. The fault-tolerant control strategy is verified.
The following conclusions can be drawn. (1) The strategies with the injection of third harmonic exhibit the superior performance of copper losses and torque output capability than that with sinusoidal current mode thanks to the more thorough current optimization. Therefore, the fault-tolerant control strategy based on third harmonic injection is more favorable for the stator copper loss optimization in the full torque range. (2) The proposed FRML control strategy based on harmonic current injection can further expand the range of torque optimization and enhance adaptability to various load conditions. (3) The proposed fault-tolerant control strategy is scalable. Future work will be focused on extending the applicability of the proposed control strategy to other polyphase motors, such as nine-phase motors.
keywords:Dual three-phase permanent magnet synchronous motor, open-phase fault, fault-tolerant control, harmonic current injection, minimum copper loss
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.240480
国家自然科学基金(62371233, 52177049)和航空基金(2022Z024052003, 20230058052001)资助项目。
收稿日期2024-03-27
改稿日期2024-04-17
艾星全 男,1999年生,硕士研究生,研究方向为多相电机容错控制。
E-mail: axqnuaa@nuaa.edu.cn
肖 岚 女,1971年生,教授,博士生导师,研究方向为航空电源系统、逆变器并联及并网控制等。
E-mail: xiaolan@nuaa.edu.cn(通信作者)
(编辑 崔文静)