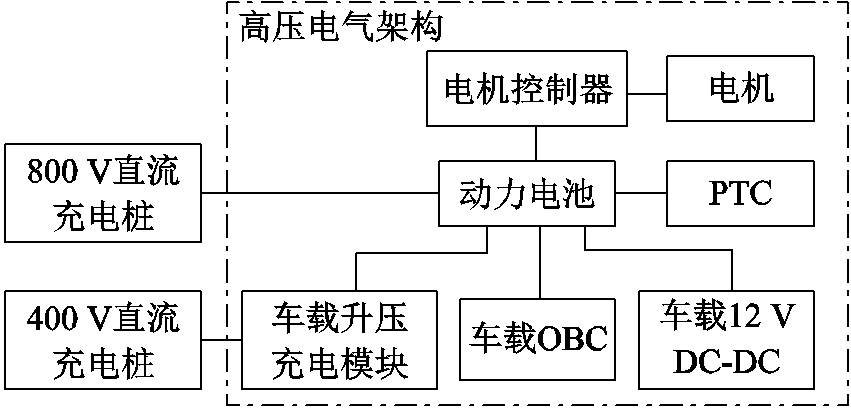
图1 800 V高压电气架构拓扑
Fig.1 800 V mainstream electric drive high voltage topology
摘要 为提高电动汽车性能及充电速率,电动汽车正快速布局800 V高压架构;但与之匹配的高压充电桩对配电网质量要求高、建设成本高,应用和普及存在滞后性,目前主流直流充电桩仍为400 V低压平台。电动汽车高压架构如何在过渡阶段及未来兼容低压充电桩,是目前急需解决的问题。该文在分析研究高压架构应用现状和充电需求的基础上,利用驱动系统和充电装置不同时工作的特点,提出一种应用于电动汽车的驱动分时复用升压充电拓扑及控制策略。充电模式下复用电机绕组为储能电感,电机逆变控制器为斩波开关控制器,通过三相交错并联Boost电路实现大功率升压变换,从而提高800 V高压架构充电兼容能力,节约了整车空间、质量和成本,提高了汽车元器件及公共设施利用率,具有显著的经济效益及应用价值。
关键词:电动汽车 驱动系统 分时复用 交错并联Boost电路
随着化石能源短缺以及环境的持续恶化,世界各国都在探寻更加节能环保的生活方式。新能源汽车作为能源转型和低碳出行的重要方式,深受各国“追捧”。我国政府出台了一系列的政策支持新能源汽车的生产消费,强调新能源汽车是我国由汽车大国迈向汽车强国的必由之路[1]。
新能源汽车在推广过程中,面临续行里程短、充电难、充电慢的问题,随着电动汽车的发展,人们对充电速率提出了更高的要求,提高充电功率可以通过增大电流或提高电压等方式[2]。目前,采用低压架构匹配大电流的车型有特斯拉Model 3、极氪001等,但大电流仅可在10%~30%荷电状态(State of Charge, SOC)条件下实现最大功率充电,且发热量大,对散热要求高,成本相应增加。大电流快充发展受到限制,因此提高系统电压成为高效充电的主流选择。高压驱动系统也更易于实现高功率和大转矩输出,运行效率更高、续行里程更长、充电速度更快,大幅降低大电流带来的车内线束过粗等问题,可优化空间布局、减轻整车质量[3]。
目前,行业内普遍认为800 V电压等级是电动汽车的发展方向之一。预计未来行业内将普遍采用高电压架构,高压平台可提高充电效率,实现快速补能。随着高压供应链的逐渐成熟,目前采用800 V高压架构的车型国外有保时捷Taycan、现代Ioniq5等,国内车企包括小鹏、理想、比亚迪、广汽等[4]。
为满足电动汽车更加便捷和快速的充电需求,国内市场投入运行大量的直流快充站。统计显示,现存直流充电桩以500 V以下的中低压为主。面向私家车的中低压快充桩所占比例大于93.3%。高电压快充桩对城市的配电要求更高,建设成本也更高,且应用和普及存在滞后性。因此电动汽车从400 V向800 V过渡及未来发展的过程中,急需解决高压架构兼容低压充电桩的问题[5]。
电动汽车驱动系统和充电系统早期是两套独立工作的装置[6]。随着电车技术的深入探索和电力电子技术发展的成熟,利用电动汽车驱动和充电装置不同时工作的特点,可以降低造车成本。于是有学者提出让两套系统共用一套电器元件,即将驱动系统和充电系统组合成一个系统,称为“驱动-充电”一体化装置[7-9]。
文献[10]采用一个6定子绕组永磁电机,提出了一种完全集成的车载充电器。该一体化结构减少了器件数量、降低了成本、节约了空间。但在充电模式下,永磁电机转子不停旋转,发热严重、损耗较大,需要激活离合器,防止传动轴带动汽车运动。文献[11]提出了一种新型电动汽车车载充电器,充电器由不控整流桥和Boost变换器组成,充分利用电机三相绕组和驱动逆变器,但未考虑电机绕组的耦合关系,只实现电流断续导通模式(Discontinous Conduction Mode, DCM)下的小功率充电情景。文献[12]针对插入式混动汽车单电机驱动逆变系统,提出了一种单相集成充电器,三相逆变桥中两桥臂控制开关的关断/闭合,组成单相全桥双向交直流整流变换器,电机绕组串联作为滤波电感。但仅从概念方面提出了此种集成复用方案,并未在电路层面进行理论分析。
文献[13]利用单电机单变换器的拓扑结构实现了驱动充电一体化。充电模式下,三相电机逆变器作为一个三相功率因数校正(Power Factor Correction, PFC)Boost 变换器工作,但该拓扑方案需要增加额外的整流电路,且仅支持单相220 V 电源充电,充电功率受到一定的限制。文献[14]提出了含三组不控整流、H桥逆变器、磁组合变压器和前级DC-DC变换器的驱动充电一体化拓扑方案。采用磁组合变压器与开绕组电机驱动技术,实现隔离的驱动和充电,但存在系统器件多和实现复杂的问题。
基于以上分析,本文提出了复用电动汽车驱动系统的逆变控制器及电机绕组实现450 V升压、880 V供给动力电池充电的拓扑方案。分析了电机绕组电感的耦合关系,为提高系统响应速度,在双环控制基础上研究并提出了主动均流的PI-模型预测控制(Model Predictive-Control, MPC)混合控制策略;通过仿真及实验验证了本文所提拓扑及控制策略的有效性及优越性。
电动汽车驱动电机是驱动系统中的关键部件之一,其性能不仅对驱动器系统控制甚至对电动汽车整体都起着至关重要的作用。
目前,主流车厂开发的电动汽车800 V高压电气架构,主要装置包含动力电池、车载充电器(On-Board Charger, OBC)、高压车载12 V的DC-DC变换器、电机控制器、电机、加热器(Positive Temperature Coefficient, PTC)、车载升压充电模块,其系统拓扑结构如图1所示。
通过对比研究高压架构内电机及其控制器拓扑与Boost变换器拓扑,可得Boost变换器所需功率开关管、升压电感、二极管、滤波电容等元器件,都包含在驱动系统中。利用电动汽车停车时电机驱动系统闲置特点以及电机绕组的电感特性,在拓扑中加入两个继电器开关S1、S2和少量无源元器件,即可实现驱动系统分时复用升压充电功能。复用升压变换器由内嵌式永磁同步电机和三相逆变器共同构成,如图2所示。
图1 800 V高压电气架构拓扑
Fig.1 800 V mainstream electric drive high voltage topology
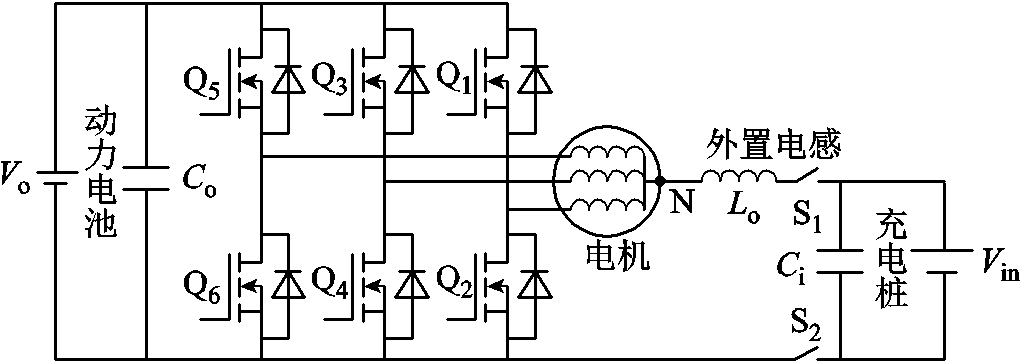
图2 驱动复用升压变换器拓扑结构
Fig.2 Drive multiplexed Boost converter topology
在该拓扑结构中,永磁同步电机绕组充当三相交错并联Boost变换器的耦合电感,三相逆变器模块充当同步整流开关模块。升压充电模式原理为:充电桩输出稳定的450 V直流电压,通过输入电容滤除杂波,经外置电感到电机绕组中性点N进入三相交错并联Boost升压变换器,升压至充电所需880 V电压等级。
本文第1节对驱动复用升压充电拓扑结构和整体实现进行了分析,下面对复用升压变换器关键部件进行建模分析。
本文电动汽车驱动系统采用内嵌式永磁同步电机,根据其三相绕组的绕线方式和方向,可以将其近似为恒互感模型且呈反向耦合关系,电机三相绕组耦合关系及等效串并联结构如图3所示。
某相绕组磁通包含另外两相电流产生互感磁通以及自感磁通;绕组电感与转子位置对应的电角度与其通过电流有关,由于dq轴定义在转子上,通过d轴与A相绕组的夹角θ表示转子电夹角,θr为转子机械角度,磁通关系为
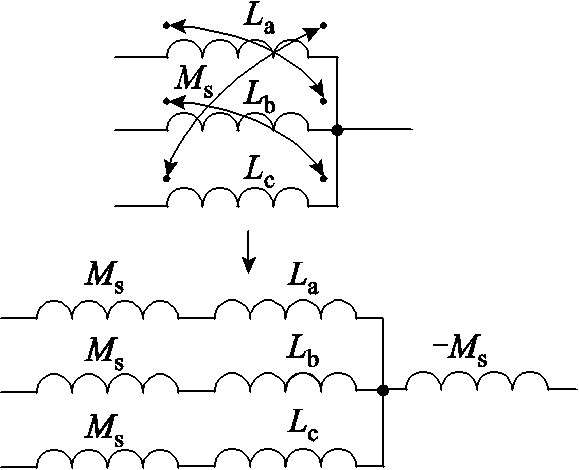
图3 电机三相绕组耦合关系及等效结构
Fig.3 Coupling relation and equivalent structure of three-phase winding of motor
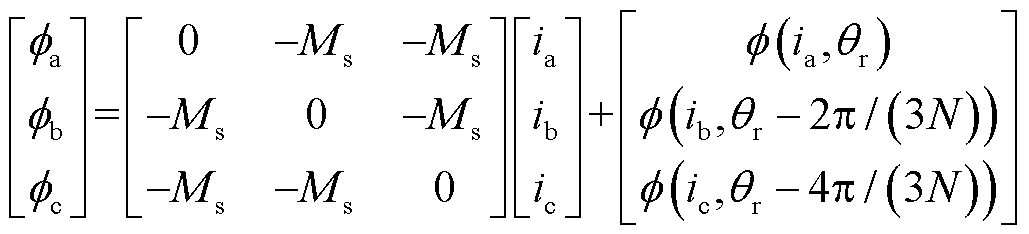 (1)
(1)
式中,N为电机极对数。
永磁电机恒互感模型电感之间的关系为
 (2)
(2)
由此可推导出互感表达式为
 (3)
(3)
式中,Ld为定子d轴电感;Lq为定子q轴电感;L0为定子零序电感;Lm为定子电感波动,该值随转子角度变化发生波动;Ms为定子互感,该值为定子绕组之间的平均互感;Ls为单相定子绕组平均自感。
工程上常采用两相测量法测量dq轴电感。将数字电桥接在电机的任意两线端,非常缓慢地转动电机转子,Lq为电桥测得数值的最大值的1/2,Ld为最小值的1/2。由dq轴电感反推Clarke和Park变换获得abc坐标系下三相绕组电感值La、Lb、Lc分别为
 (4)
(4)
式中,θ=Nθr,可知同一电机绕组条件下abc坐标系三相绕组电感随电机转子位置改变而发生周期性波动。
电动汽车驻车充电时,能量反向由充电器端经停转的电机定子绕组,并经电机控制器升压变换为目标电压。为减小输入电流纹波,本文采用三相交错并联拓扑结构。
当采用三相交错并联技术,控制PWM相位交错120°,单周期内共有6个开关模态,电路开关状态如图4所示。
单周期内开通与关断对称,此处重点研究半个周期内工作模态;在t0~t1期间:绕组Wa、Wb充电储能,电流上升,绕组Wc续流放电,电流下降;在t1~t2期间:绕组Wb充电储能,电流上升,绕组Wa、Wc续流放电,电流下降;在t2~t3期间:绕组Wb、Wc充电储能,电流上升,绕组Wa续流放电,电流下降;由于反向耦合,各模态等效电感不同,电感电流斜率变化。复用升压变换器稳态工作波形如图5所示。
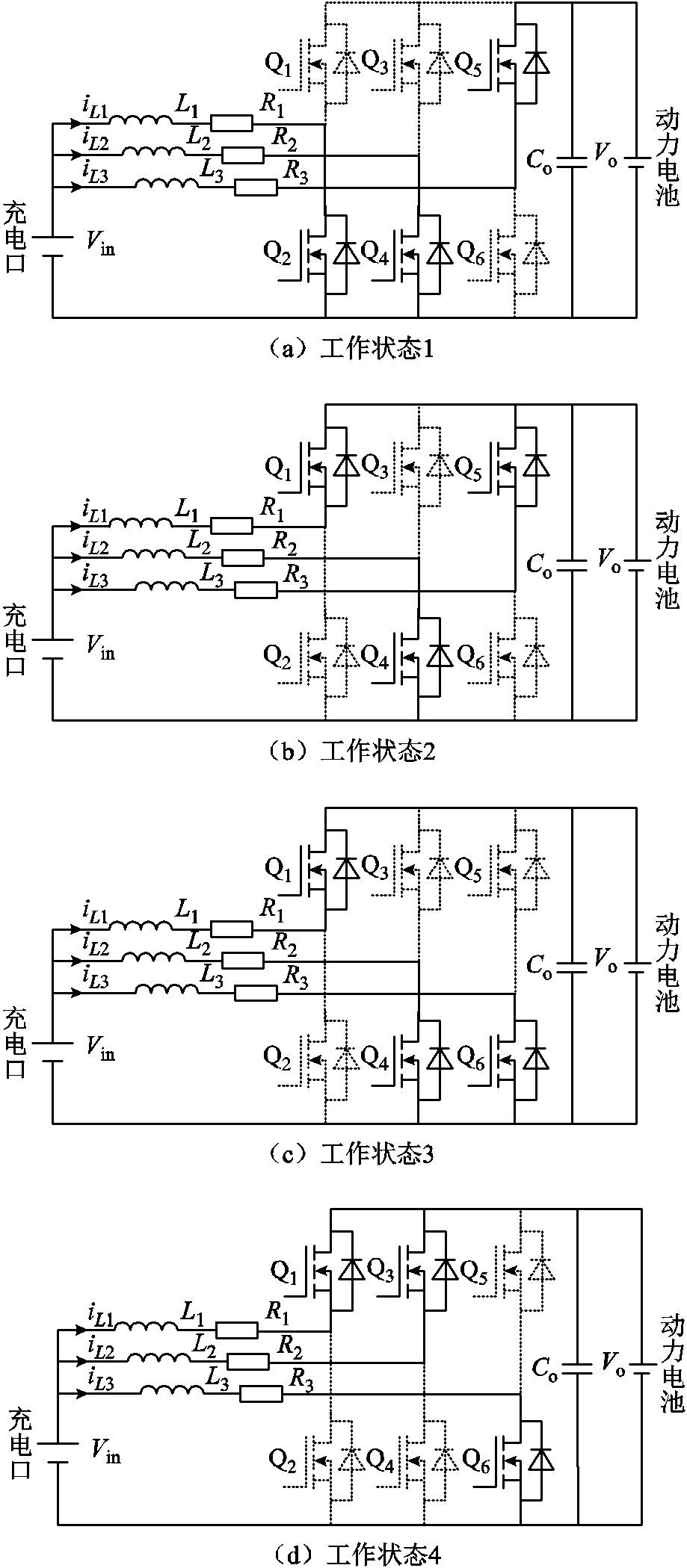
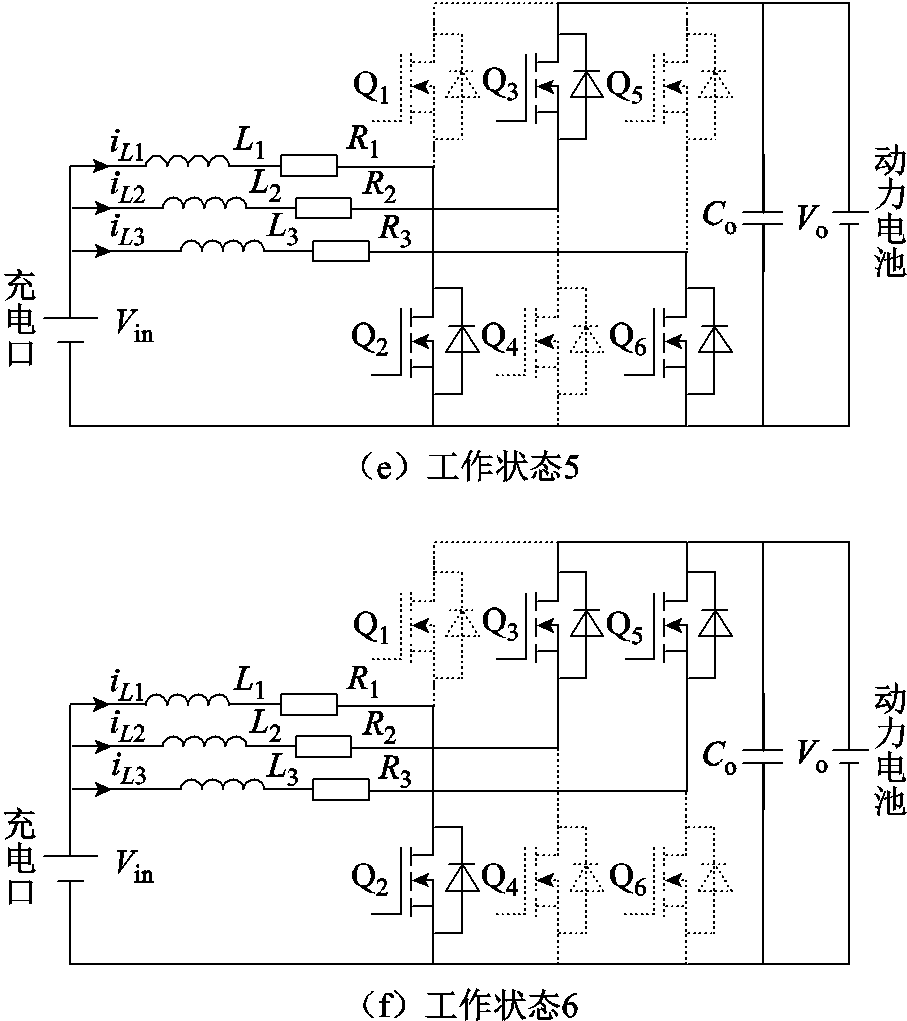
图4 复用升压变换器工作模态
Fig.4 Multiplex Boost converter operating mode diagram
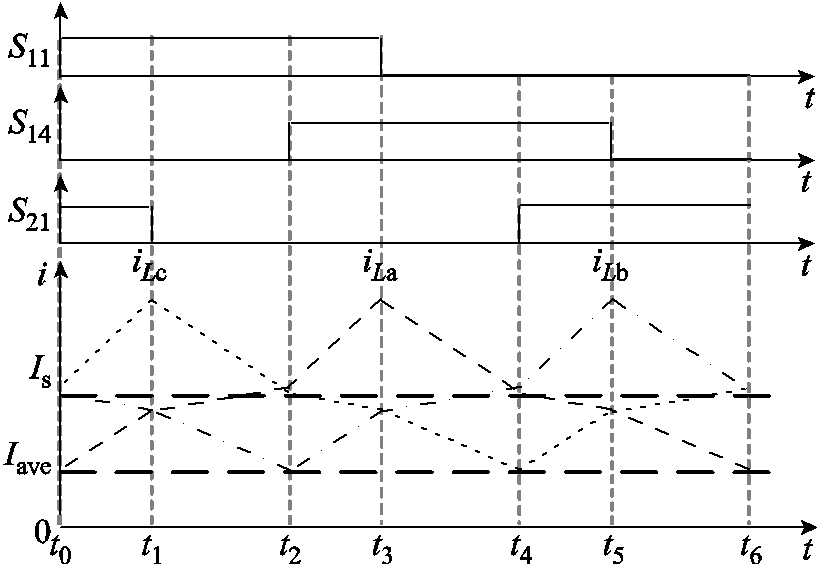
图5 复用升压变换器稳态工作波形
Fig.5 Multiplex Boost converter steady-state operating waveforms
模态1:开关管Q2、Q4、Q5导通,Q1、Q3、Q6关断,状态表达式为
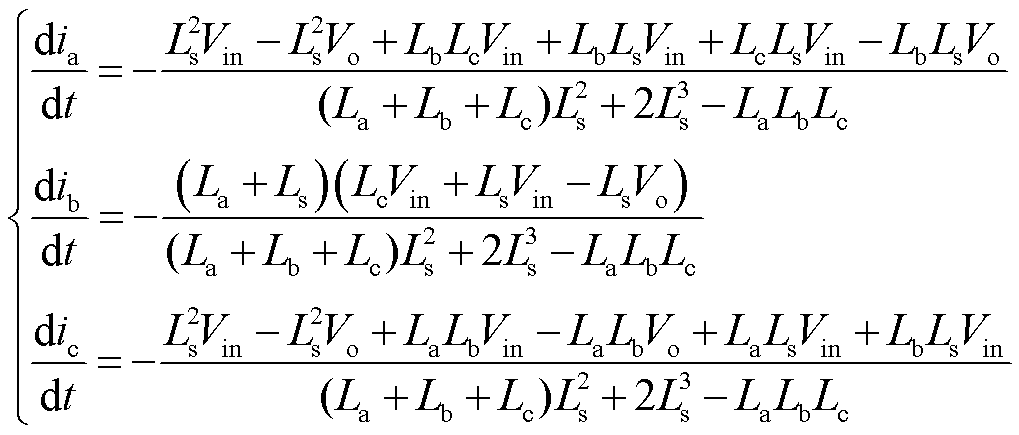 (5)
(5)
式中,Vin为变换器输入直流电压;Vo为变换器输出直流电压;Ls为等效至母线端互感;La、Lb、Lc分别为A、B、C三相绕组自感;di/dt为三相合电流变化量;dia/dt、dib/dt、dic/dt分别为A、B、C三相绕组电流变化量。
模态2:开关管Q1、Q4、Q5导通,Q2、Q3、Q6关断,状态表达式为
 (6)
(6)
模态3:开关管Q1、Q4、Q6导通,Q2、Q3、Q5关断,状态表达式为
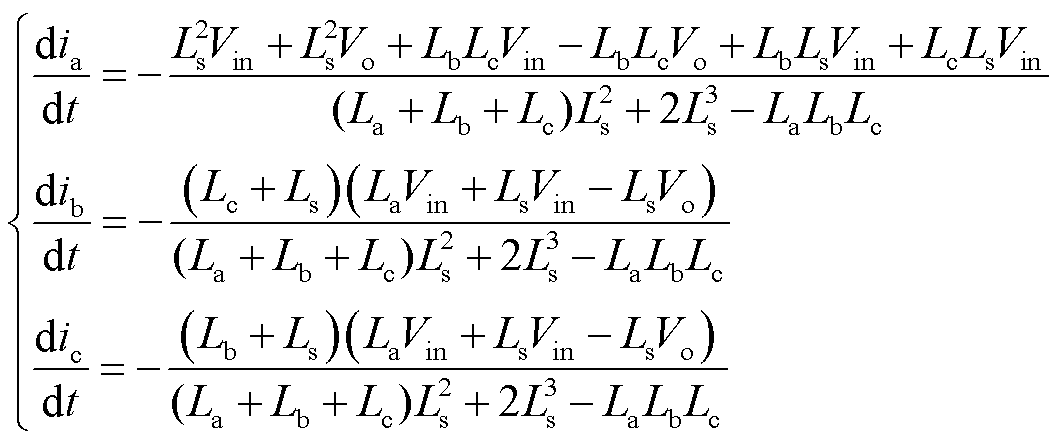 (7)
(7)
若Ls介于正值零极点之间,则导致t1~t2时刻ib纹波斜率由正变负,增大输入电流纹波;t4~t5时刻ib纹波斜率由负变为正,增大输入电流纹波。为满足三项交错并联、实现三相电流纹波互补、减小输入电流纹波,采用在中性点N处外置电感Lo,抵消主回路的负值互感影响。等效电感如图6所示。令三相绕组均流,外置电感电流为三相绕组电流的3倍,可将外置电感Lo等效进入电机三相绕组中,图6中,流过Lo电流为三相平均电流之和,L1=3(Lo-Ms),L2=Ms,L3=La+Lb+Lc。

图6 含外置电感电机绕组等效
Fig.6 Equivalent of motor windings with external inductors
针对系统控制目标与工况突变后系统的动态响应效果,本节对传统双环和MPC两种开关电源控制策略进行分析,提出PI-MPC混合控制策略,并对不同工况下实际仿真结果展开研究与分析。
三相交错驱动复用升压控制系统结构主要包括电路拓扑与控制策略两部分。由于双环控制需反馈电压电流,经两个PI环调节决定控制输出,参数设计困难、电路计算复杂、调整时间长[15]。模型预测控制实际是一种以优化的思想求解变换器控制量的控制方法,应用于电源变换器控制时,其根据变换器模型求解下一时刻的最优开关状态,数学模型求解的过程迅速,能够快速响应系统变化趋势,提高动态响应能力。
本文提出一种PI与MPC结合的PI-MPC混合控制策略。直接采用变换器离散等效模型独立控制开关变换器。剔除电流环PI调节器,保留电压环PI,可以有效降低设计难度,消除模型预测控制的静态误差,稳定负载电压。PI-MPC混合控制系统的控制框图如图7所示。
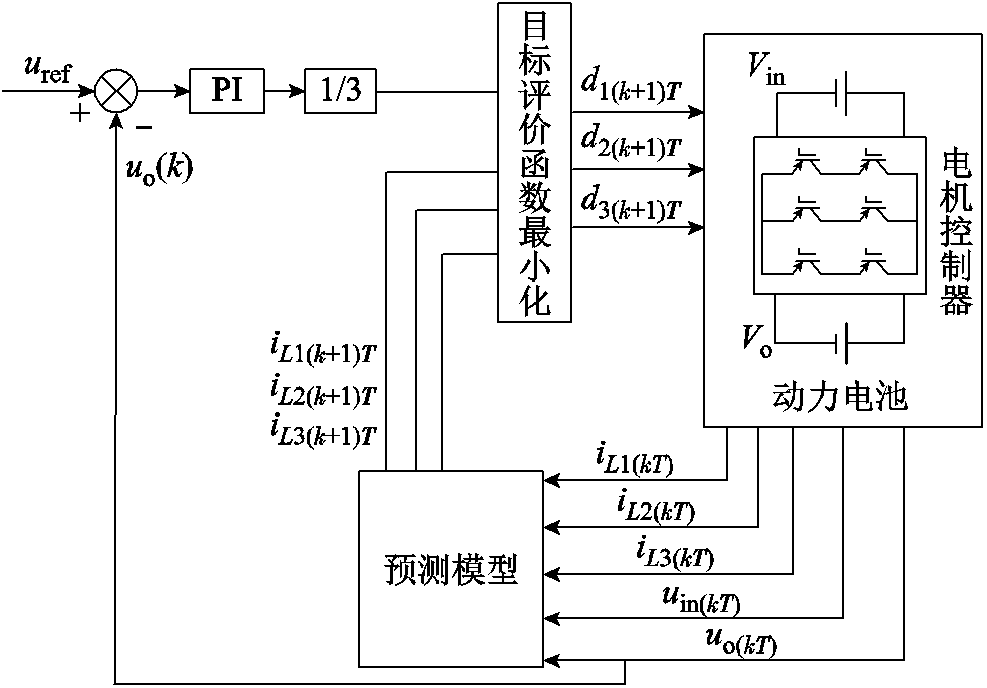
图7 PI-MPC混合控制系统框图
Fig.7 PI-MPC hybrid control system block diagram
模型预测实施主要为三个步骤[16]:①建立等效模型对状态变量未来设定时间段内的变化进行预测;②根据期望控制效果建立目标评价函数;③求解目标评价函数的最优解确定最优的系统状态。
主功率开关管Q2、Q4、Q6的控制逻辑相差120°,均需独立控制。因此可将三相交错并联Boost变换器拆分为3个完全相同的单相Boost电路进行离散状态建模[17]。
以电感电流与输出电压为状态变量,建立状态空间表达式,根据线性定常系统的离散化定理[18],可以求得变换器系统的离散状态方程。根据幂级数分解关系,获得离散状态方程为
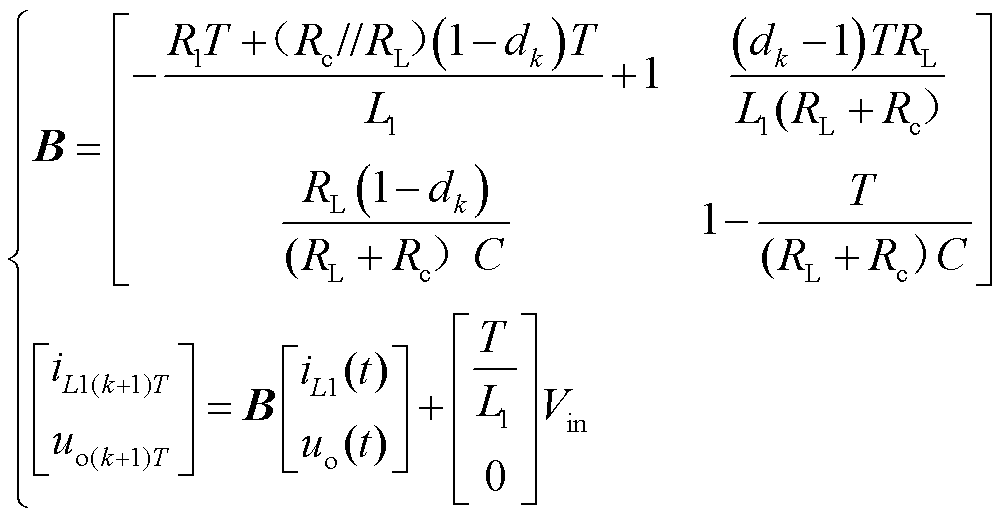 (8)
(8)
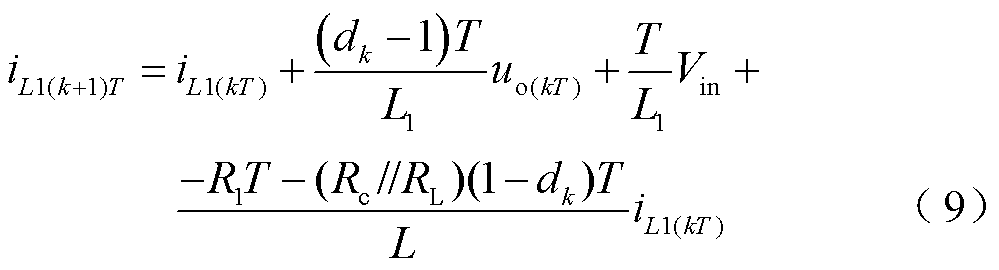
式中,iL1(k+1)T为第k+1个开关周期电感电流;uo(k+1)T为第k+1个开关周期负载电压。经矩阵变换运算后得系统状态变量的递推关系式为
 (10)
(10)
为更好地表达预测值与目标值的偏差,本文采用误差二次方为目标评价函数,其表达式为
 (11)
(11)
将系统状态变量递推关系式(9)、式(10)代入目标评价函数中,并由极点法求得最值,简化后开关管状态变量占空比预测表达式为
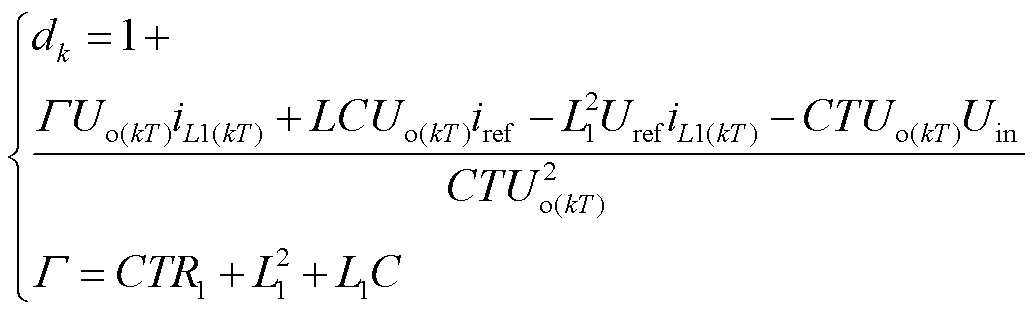 (12)
(12)
驱动复用升压技术中,选用电机为星形联结的三相内置式永磁同步电机,系统仿真采用 Simulink内嵌式永磁同步电机模块,涉及的相关参数按照实际电机参数设计,搭建系统仿真模型,仿真的参数见表1。
将电机相关参数代入式(4)得到三相绕组自感值变化规律如图8所示,电机有4对磁极,三绕组自感以45°为一个变化周期。当转子位置在7.5°、15°、18°时三相电感分别存在极值,不同转子位置对仿真结果的影响见表2。
表1 系统仿真参数
Tab.1 System simulation parameters
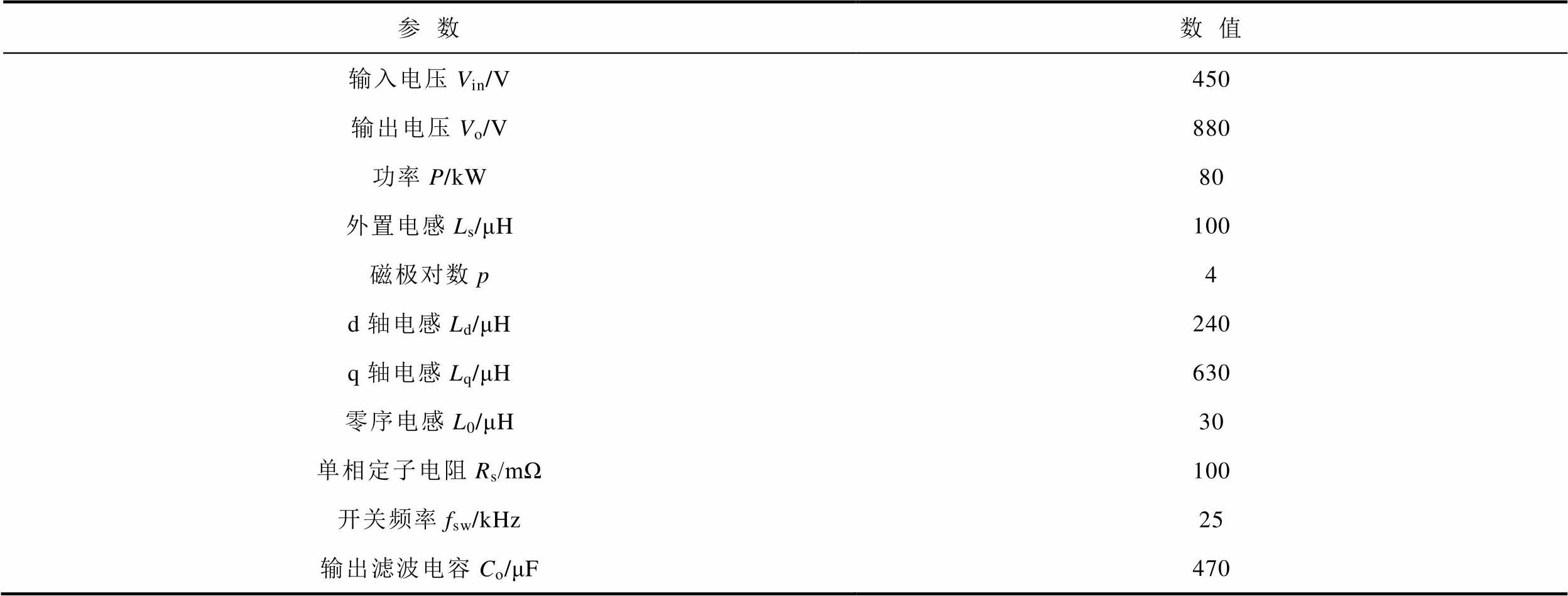
参数数值 输入电压Vin/V450 输出电压Vo/V880 功率P/kW80 外置电感Ls/μH100 磁极对数p4 d轴电感Ld/μH240 q轴电感Lq/μH630 零序电感L0/μH30 单相定子电阻Rs/mΩ100 开关频率fsw/kHz25 输出滤波电容Co/μF470
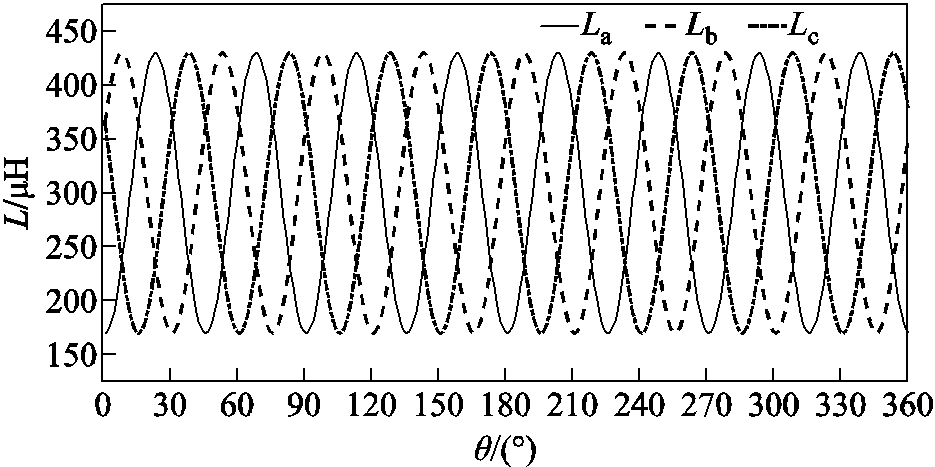
图8 三相绕组自感值与转子位置的关系
Fig.8 The relationship between inductance value of three-phase winding and rotor position
表2 典型转子位置下电流纹波
Tab.2 Current ripple at typical rotor position
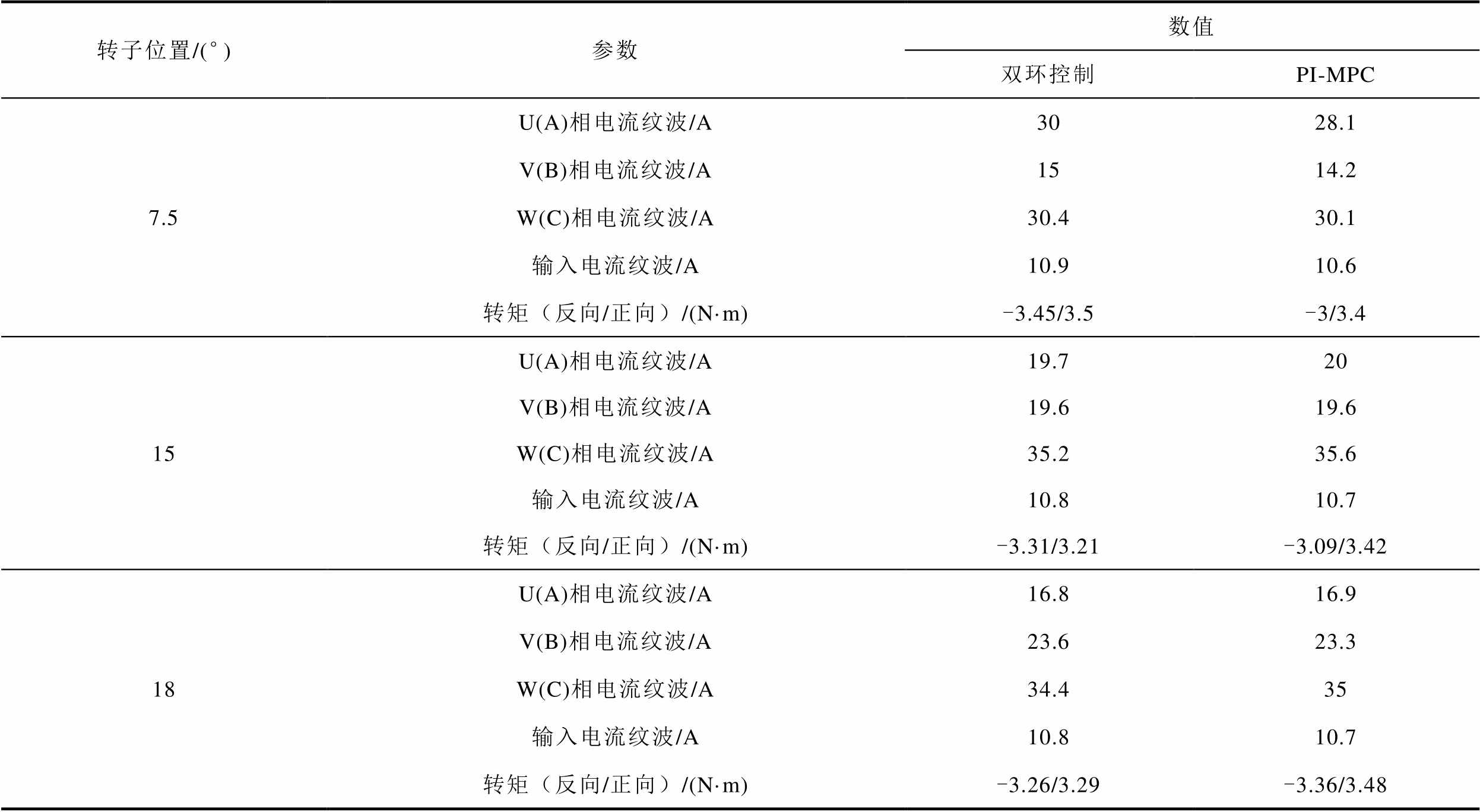
转子位置/(°)参数数值 双环控制PI-MPC 7.5U(A)相电流纹波/A3028.1 V(B)相电流纹波/A1514.2 W(C)相电流纹波/A30.430.1 输入电流纹波/A10.910.6 转矩(反向/正向)/(N·m)-3.45/3.5-3/3.4 15U(A)相电流纹波/A19.720 V(B)相电流纹波/A19.619.6 W(C)相电流纹波/A35.235.6 输入电流纹波/A10.810.7 转矩(反向/正向)/(N·m)-3.31/3.21-3.09/3.42 18U(A)相电流纹波/A16.816.9 V(B)相电流纹波/A23.623.3 W(C)相电流纹波/A34.435 输入电流纹波/A10.810.7 转矩(反向/正向)/(N·m)-3.26/3.29-3.36/3.48
仿真对比了不同转子位置下双环控制和PI-MPC混合控制的稳态电流纹波,各相电流纹波随着电感值减小而增大。总输入电流纹波大小近似相等,满足系统技术指标。典型转子位置下两种控制策略三相电流纹波仿真波形如图9所示。
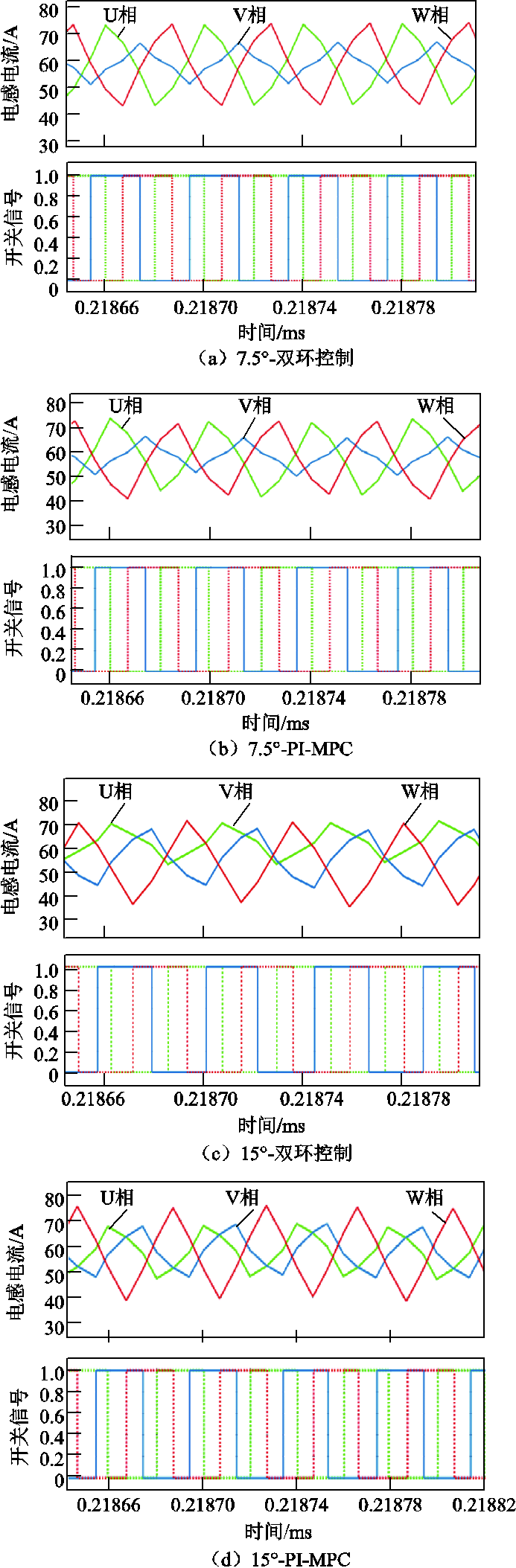
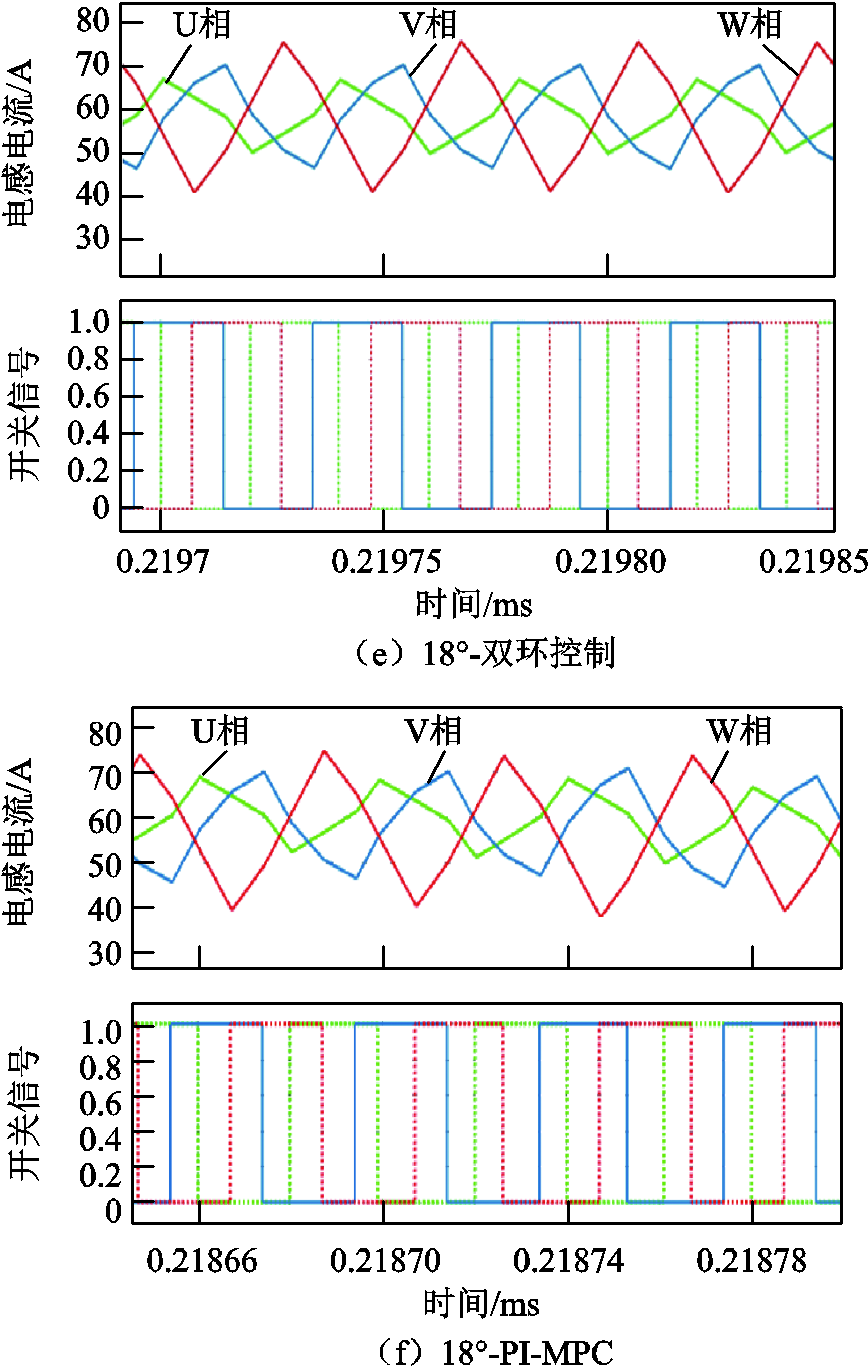
图9 典型转子位置下两种控制策略电流纹波
Fig.9 Two control strategies for current ripple at typical rotor positions
负载突变及输入电压突变工况下,仿真波形如图10所示。当系统负载由20 Ω切换到10 Ω发生突变后,双环控制策略下的系统瞬间波动电压为29.9 V,需12.03 ms完成对参考电压的无静差追踪。输入电流变化较快,但超调较大。PI-MPC混合控制策略下的系统瞬间波动电压最大仅为22.9 V,且在8.66 ms时间内迅速完成对参考电压的无静差追踪。输入电流变化快速平滑,无超调。
当系统输入电压由450 V突变到500 V后,双环控制系统瞬间波动电压为23.6 V,需50.8 ms才能完成对参考电压的无静差追踪。输入电流波动明显且存在振荡现象。PI-MPC混合控制策略下的系统瞬间波动电压为9.28 V,且在8.35 ms时间内迅速完成对参考电压的无静差追踪,输入电流变化快速平滑,波动小无振荡现象。
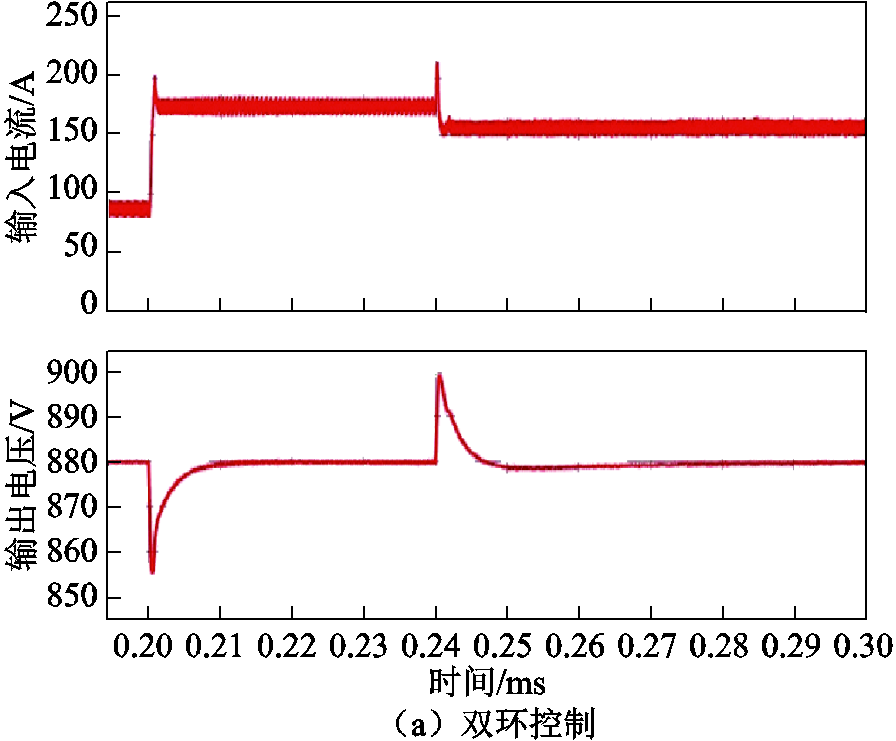
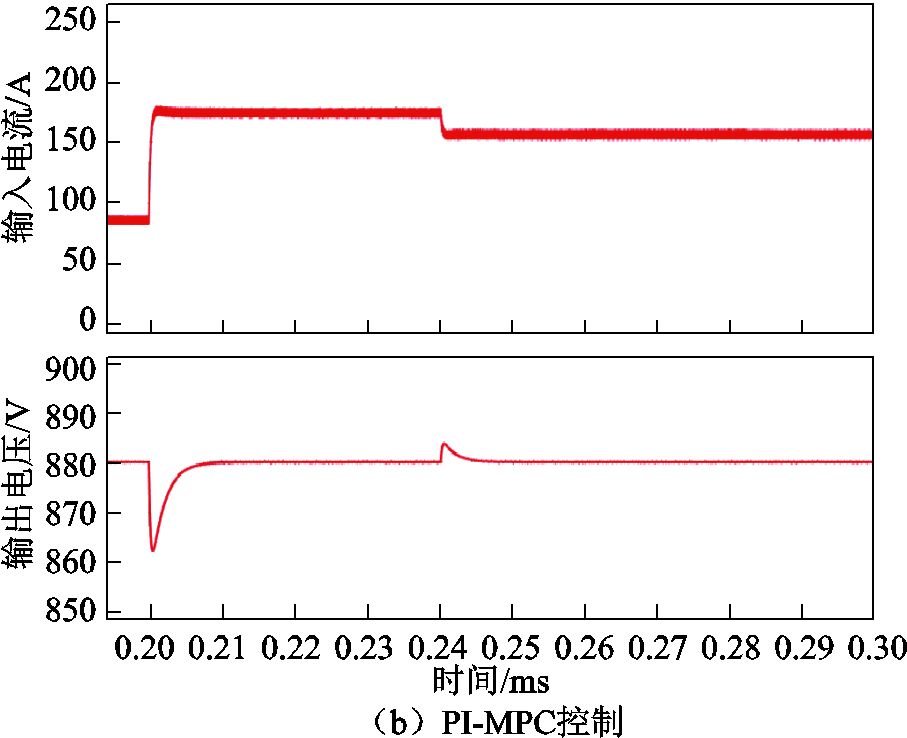
图10 输入电压和负载突变电流电压仿真波形
Fig.10 Input voltage and load sudden current voltage simulation waveforms
以上仿真结果表明,稳态运行工况下两种控制方法均可在不同转子位置实现小纹波稳态运行,且各相纹波相近。在负载突变和输入电压突变动态响应方面,PI-MPC混合控制策略的控制效果相比于双环控制策略响应速度快、超调小、稳定度高、抗干扰性强,有着较为明显的优势。
第1~3节分析了电驱复用升压变换器系统的理论、建模、设计及仿真,本节将搭建实物系统进行实际调试,并对结果进行进一步验证分析。
本文搭建了50 kW的驱动复用升压变换器实验平台,如图11所示,设备主要包括250 kW内嵌式永磁同步电机、主功率控制器、外置电感、电阻柜、继电器、主电源、辅助电源。实验具体参数见表3。
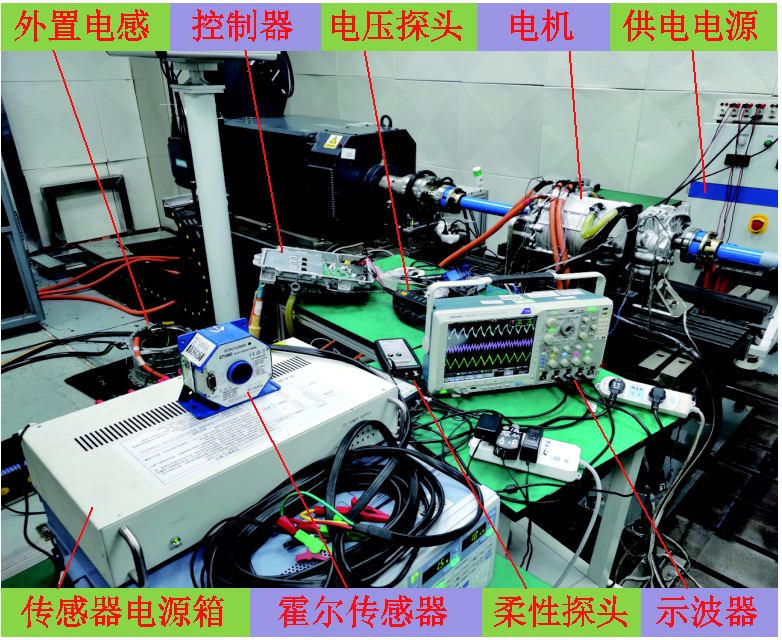
图11 电驱复用升压变换器实验平台
Fig.11 Experimental platform of electric drive multiplex boost converter
表3 系统实验参数
Tab.3 System experiment parameters
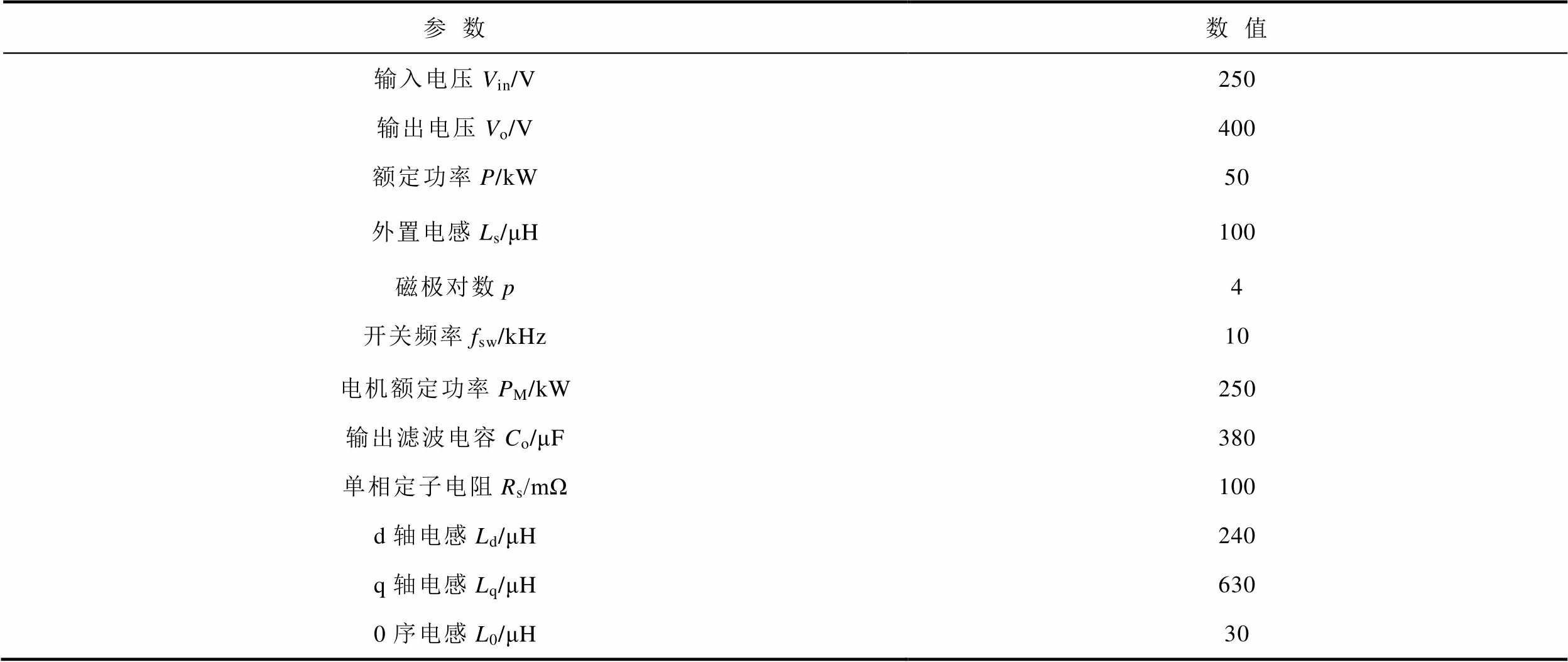
参数数值 输入电压Vin/V250 输出电压Vo/V400 额定功率P/kW50 外置电感Ls/μH100 磁极对数p4 开关频率fsw/kHz10 电机额定功率PM/kW250 输出滤波电容Co/μF380 单相定子电阻Rs/mΩ100 d轴电感Ld/μH240 q轴电感Lq/μH630 0序电感L0/μH30
外置电感为30 μH和75 μH时的三相电流与合电流纹波实验波形分别如图12a、图12b所示,可以看出在下半个周期中,还存在纹波斜率由负转正的情况,导致输入合电流纹波较大,分别为22.8 A和20.6 A。三相电感电流实现均流,约为67.9 A。

图12 不同外置电感下电流纹波波形
Fig.12 Current ripple shape waveforms under different external inductors
三相电感电流实现均流,由于电机转子位置影响绕组电感值,进而导致三相纹波产生差值。为验证转子位置对电流纹波的影响,测试了外置电感为100 μH时两个不同转子位置相同工况下电流纹波稳态值,波形变化基本与仿真一致。电驱复用升压变换器三相交错并联运行稳态电流纹波实验波形如图13所示。
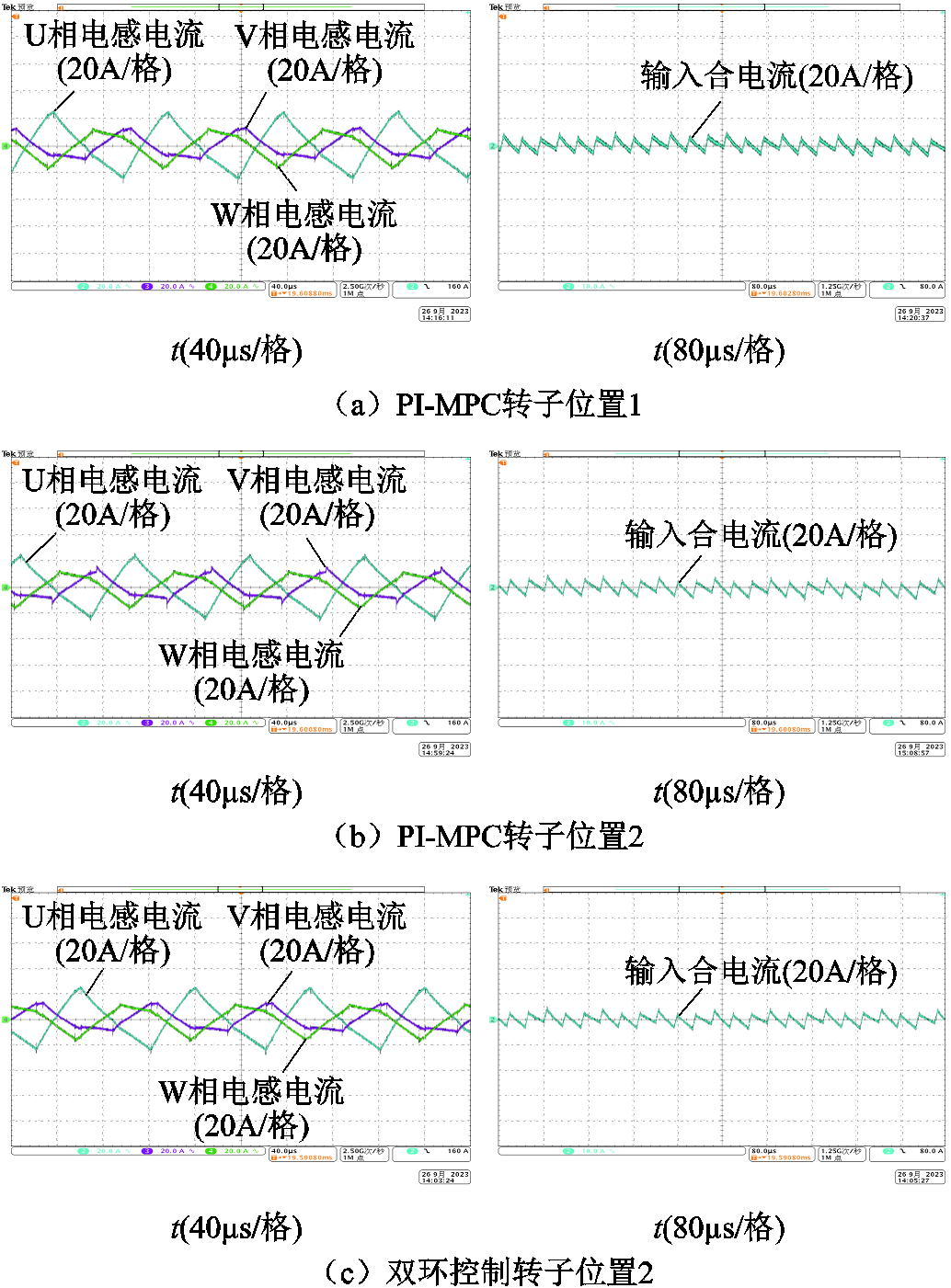
图13 两种转子位置及控制策略下电流纹波
Fig.13 Current ripple under two rotor positions and control strategies
不同工况下稳态实验数据见表4。
表4 稳态实验数据
Tab.4 Steady experimental datas
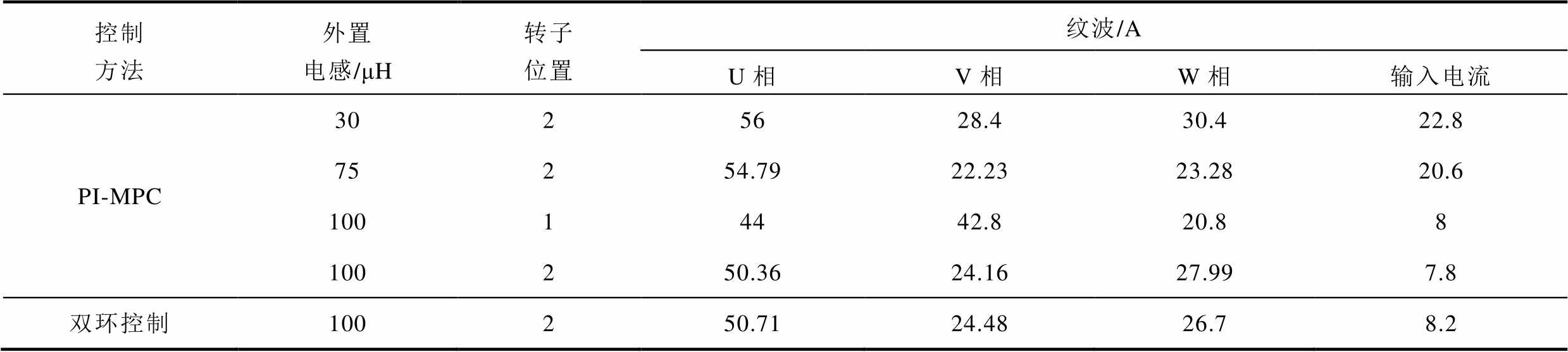
控制方法外置电感/μH转子位置纹波/A U相V相W相输入电流 PI-MPC3025628.430.422.8 75254.7922.2323.2820.6 10014442.820.88 100250.3624.1627.997.8 双环控制100250.7124.4826.78.2
当负载突减(5 Ω→3.3 Ω)时,实验验证了不同转子位置,PI-MPC混合控制均比传统双环控制的瞬态响应更快、波动更小、电流超调量更小,实验波形如图14所示。两种转子位置下瞬态实验数据见表5。

图14 两种控制策略切载实验波形
Fig.14 Experimental waveforms of cutting load with two control strategies
表5 瞬态实验数据
Tab.5 Transient experimental datas

控制方法负载/Ω转子位置响应时间/ms峰值电压/V电流超调/A 双环5→3.3114.433.431.2 5→3.3215.23233.3 PI-MPC5→3.318.629.811.7 5→3.328.929.712.2
实验结果验证了驱动复用升压变换器拓扑及控制策略的有效性。电动汽车驱动复用可实现稳定升压及瞬态快速响应。本文所提电动汽车驱动复用升压变换器不仅有效解决了高压架构兼容低压充电桩问题,还减轻了电动汽车内部装载空间和质量压力,降低了成本。
本文通过分析电动汽车800 V高压架构电驱系统组成结构和功能特点,针对充电难和高压充电桩建设滞后的问题,提出了驱动复用升压变换器系统。通过理论分析与仿真,选取了合适的拓扑结构及控制方法。最后基于电机拖动实验室,搭建系统硬件平台,实验测试结果满足各项技术指标:
1)通过理论分析驱动复用升压变换器的工作原理,研究内嵌式永磁同步电机定子绕组的耦合关系及转子位置对各相绕组电感值的影响关系,选取合适的外置电感减小绕组互感的负面影响,提升三相交错并联减小电流纹波效果。
2)简化等效电路建立连续和离散的小信号模型,在传统双环控制的基础上,提出动态性能更优、设计难度更小的PI-MPC混合控制策略,实现三相均流。
3)搭建了50 kW的驱动复用升压变换器硬件实验平台,输入电压为250 V,输出电压额定电压400 V的工作状态下分别进行稳态运行测试及切载动态性能测试,稳态运行时电流纹波及输出电压满足技术要求,切载测试验证了所提控制方法动态响应性能的优越性。
参考文献
[1] 新能源汽车产业向智能制造转型是发展的必然趋势[J]. 材料保护, 2019, 52(7): 172-172.
The transformation of new energy automobile industry to intelligent manufacturing is an inevitable trend of development[J]. Materials Protection, 2019, 52(7): 172-172.
[2] 纪竹童. 电动汽车“驱动-充电”一体化拓扑研究[J]. 科学技术创新, 2021(15): 156-157.
Ji Zhutong. Research on “drive-charge” integrated topology of electric vehicle[J]. Scientific and Technological Innovation, 2021(15): 156-157.
[3] 严佳丽. 纯电动汽车高电压快充平台技术趋势[J].汽车制造业, 2022(2): 8-10,12.
Yan Jiali. Technology trend of high voltage fast charge platform for pure electric vehicles[J]. Automotive Industry, 2022(2): 8-10, 12.
[4] 李全, 暴杰, 赵慧超, 等. 车用电驱动系统技术发展趋势及其技术要求[J]. 汽车实用技术, 2021, 46(23): 188-192.
Li Quan, Bao Jie, Zhao Huichao, et al. Technical development trend and technical requirements of vehicle electric drive system[J]. Automobile Applied Technology, 2021, 46(23): 188-192.
[5] 暴杰, 胡晶, 许重斌, 等. 电动汽车800 V电驱动系统核心技术综述[J]. 汽车文摘, 2023(1): 1-9.
Bao Jie, Hu Jing, Xu Chongbin, et al. A review on core technologies of 800 V electric drive system for electric vehicles[J]. Automotive Digest, 2023(1): 1-9.
[6] 赵剑飞, 薛洋, 刘建波. 电动汽车用充电器与驱动器一体化拓扑研究[J]. 电子器件, 2016, 39(5): 1215-1219.
Zhao Jianfei, Xue Yang, Liu Jianbo. Research on the integration of charger and driver for electric vehicle[J]. Chinese Journal of Electron Devices, 2016, 39(5): 1215-1219.
[7] Pellegrino G, Armando E, Guglielmi P. An integral battery charger with power factor correction for electric scooter[J]. IEEE Transactions on Power Electronics, 2010, 25(3): 751-759.
[8] Haghbin S, Khan K, Lundmark S, et al. Integrated chargers for EV’s and PHEV’s: examples and new solutions[C]//The XIX International Conference on Electrical Machines - ICEM, Rome, Italy, 2010: 1-6.
[9] Dusmez S, Khaligh A. A novel low cost integrated on-board charger topology for electric vehicles and plug-in hybrid electric vehicles[C]//2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 2012: 2611-2616.
[10] Haghbin S, Lundmark S, Alakula M, et al. Grid-connected integrated battery chargers in vehicle applications: review and new solution[J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 459-473.
[11] Solero L. Nonconventional on-board charger for electric vehicle propulsion batteries[J]. IEEE Tran-sactions on Vehicular Technology, 2001, 50(1): 144-149.
[12] Shi Lisheng, Meintz A, Ferdowsi M. Single-phase bidirectional AC-DC converters for plug-in hybrid electric vehicle applications[C]//2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 2008: 1-5.
[13] Pellegrino G, Armando E, Guglielmi P. An integral battery charger with power factor correction for electric scooter[J]. IEEE Transactions on Power Electronics, 2010, 25(3): 751-759.
[14] 李春杰. 电动汽车充电与驱动集成化技术研究[D]. 南京: 南京航空航天大学, 2016.
Li Chunjie. Research on integrated technology of charging and driving of electric vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016.
[15] 王艳敏, 曹雨晴, 夏红伟. Buck变换器的电压电流双闭环终端滑模控制[J]. 电机与控制学报, 2016, 20(8): 92-97.
Wang Yanming, Cao Yuqing, Xia Hongwei. Terminal sliding mode control for Buck converter with structure of voltage and current double closed loop[J]. Electric Machines & Control, 2016, 20(8): 92-97.
[16] 朱艺锋, 赵海龙, 张国澎, 等. 单相五电平整流器滑模模型预测控制[J]. 电工技术学报, 2022, 37(8): 2030-2039.
Zhu Yifeng, Zhao Hailong, Zhang Guopeng, et al. Sliding mode model predictive control of single-phase five-level rectifier[J]. Transactions of China Electrotechnical Society, 2022, 37(8): 2030-2039.
[17] 肖蕙蕙, 魏苏东, 郭强, 等. 优化开关序列的PWM整流器模型预测控制策略[J]. 电工技术学报, 2022, 37(14): 3665-3675, 3700.
Xiao Huihui, Wei Sudong, Guo Qiang, et al. Model predictive control strategy for PWM rectifier with optimized switching sequence[J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3665-3675, 3700.
[18] Zhao Feng, Li Dong, Chen Xiaoqiang. Energy storage bidirectional DC-DC converter model predictive control[J]. Journal of Applied Science and Engineering, 2023, 27(1): 1975-1983.
Multiplexing Booster Technology for Electric Vehicle Drive
Abstract Electric vehicles (EVs) are rapidly adopting 800 V high-voltage architectures to improve their performance, increase charging rates, and enhance overall efficiency. This shift promises significant benefits, such as shorter charging times, improved energy efficiency, and better compatibility with future fast-charging infrastructure. However, the deployment of charging infrastructure that can support 800V systems is currently limited due to high costs, stringent distribution network requirements, and slow adoption. Currently, most DC charging piles in use are based on a 400 V low-voltage platform, which creates a challenge for the widespread adoption of 800 V EVs. As a result, a critical issue that needs to be addressed is how to make the high-voltage architecture of electric vehicles compatible with the existing low-voltage charging piles during this transitional period and in the future.
To address this compatibility challenge, this study proposes a novel time-sharing multiplexing step-up charging topology and control strategy designed for electric vehicles. This strategy takes advantage of the fact that the drive system and the charging device do not operate simultaneously. When the vehicle is in charging mode, the motor winding is used as an energy storage inductor, and the motor inverter controller is repurposed as the chopper switch controller. Through a three-phase staggered parallel Boost circuit, the system achieves high-power boost conversion, making it possible to charge 800 V EVs from 400 V charging piles. This innovative approach improves compatibility with existing infrastructure while saving vehicle space, reducing weight, and lowering costs. Additionally, it increases the utilization rate of existing automotive components and public facilities, offering significant economic benefits and practical application value.
The first step in this research involved analyzing the 800V high-voltage architecture and its charging requirements, followed by an investigation of the transient characteristics of the converter. The coupling relationships and the equivalent structure of the embedded permanent magnet synchronous motor winding were studied. Mathematical modeling and coordinate transformation techniques were used to determine the inductance values of the three-phase windings, and the influence of rotor position on the inductance was quantified. To further optimize the system, external inductance was introduced to eliminate the effects of mutual inductance. The state-space averaging method was applied to analyze both the DC steady-state and AC small-signal characteristics of the converter, providing a solid theoretical foundation for the design of the control loop.
In terms of control strategy, the operating principles, advantages, and limitations of traditional voltage-current double-loop control and model predictive control (MPC) strategies were thoroughly analyzed. Given the unique characteristics of the equivalent inductance values of the three-phase windings in the multiplex boost converter motor, the research sought to improve the system's dynamic response speed while simplifying the design process. To achieve this, a hybrid control strategy combining PI (proportional-integral) control with MPC was proposed. The hybrid control retains the voltage loop PI regulator and incorporates an active current-sharing strategy. This PI-MPC hybrid control strategy enhances the system's dynamic response, especially in scenarios involving sudden load changes.
The effectiveness of the proposed control strategies was verified through simulation. Both the traditional dual-loop control and the PI-MPC hybrid control strategy demonstrated excellent performance, achieving zero-error output voltage, balanced three-phase currents, and input combined current ripple below ±10A in steady-state operation across various rotor positions. Additionally, the PI-MPC hybrid control strategy showed superior dynamic response compared to traditional dual-loop control, especially under sudden load changes, further proving its effectiveness.
To validate the theoretical findings, a 50 kW experimental platform was built in the Powertrain laboratory. The experiment involved a 250 V to 400 V boost conversion and the results were consistent with the simulations, verifying the accuracy of the proposed topology and control strategy. Overall, the study demonstrated that the designed drive multiplexing boost converter can reliably and stably achieve voltage boost through the integration of the vehicle’s drive system. This successfully addresses the challenge of making high-voltage architectures compatible with existing low-voltage charging piles, ensuring smooth and efficient operation during this crucial transition period for electric vehicle infrastructure.
Keywords:Electric vehicle, drive system, time-sharing multiplexing, staggered parallel Boost circuit
中图分类号:TM614
DOI: 10.19595/j.cnki.1000-6753.tces.L11033
中央高校基本科研业务费专项资金(2682024GF001)和四川省高效电源变换技术工程研究中心基金项目资助。
收稿日期 2024-07-14
改稿日期 2024-09-22
侯文博 男,1999年生,硕士研究生,研究方向为新能源汽车功率变换器及其先进控制技术。
E-mail:1175239635@qq.com
杨 平 女,1983年生,副教授,博士生导师,研究方向为新能源开发及应用。
E-mail:pyang@swjtu.edu.cn(通信作者)
(编辑 陈 诚)