图1 牵引供电系统阻抗测量原理
Fig.1 Schematic diagram of impedance measurement of traction power supply system
摘要 精确获取牵引供电系统的宽频带阻抗特性,是分析车-网耦合系统的宽频带振荡问题的关键途径,对保障电气化铁路的安全稳定运行具有重要意义。目前的阻抗测量技术大多难以兼顾大功率与频带可控的测量要求,因此,该文提出一种基于多电平滞环电流控制的牵引供电系统可控宽频带阻抗测量技术,测量频带为10 Hz~5 kHz,可通过一次谐波扰动注入快速获取目标频带的系统阻抗,相比于传统的滞环电流控制方法,具有更低的开关频率,并且能有效避免死区效应,改善输出电流的波形,更适用于宽频信号的跟踪控制。最后,通过仿真和硬件在环实验验证了该测量技术的有效性。
关键词:牵引供电系统 阻抗测量技术 多电平滞环电流控制 谐波扰动
在电气化铁路快速发展的过程中,以电压源型变流器(Voltage Source Converter, VSC)作为核心变流设备的电力机车的类型和数量逐年增加。由于VSC的非线性和强耦合特性,以及固有特征谐波的宽频化,给电气化铁路带来了一系列覆盖较宽频域的振荡问题,造成机车牵引闭锁,车辆无法出库,严重影响电气化铁路的正常运行[1-3]。大量研究表明,电气化铁路系统的一系列宽频带振荡问题是由电力机车和牵引供电系统的阻抗不匹配造成的[4],结合Nyquist稳定性判据[5],可对车-网系统的稳定性进行判定。因此,获取牵引供电系统的阻抗特性,对保障电气化铁路的安全稳定运行具有重要意义。
获取牵引供电系统阻抗特性的方法主要可分为两大类:阻抗数学建模和阻抗测量技术[6]。其中,阻抗数学建模依赖于数学公式的推导,需要了解系统内部的详细参数[7],而牵引供电系统结构复杂、元件众多、拓扑动态变化,且元器件的实际阻抗与生产设计参数可能存在偏差,通过阻抗测量获得的阻抗特性更贴近实际[8-9]。因此,阻抗测量技术逐渐成为一种有效的技术途径,其可在系统拓扑/参数信息不全的情况下,仅依赖端口电压、电流信息即可获取被测系统的宽频带阻抗特性。
根据有无注入谐波扰动信号,阻抗测量技术可分为主动测量法和被动测量法两类[10]。其中,被动测量法无需向系统中注入扰动,利用被测系统固有的谐波或噪声信号通过数学分析和数据处理的方法实现阻抗的估算。目前已有的方法包括:估测逼近法[11]、基于固有谐波法[12]、基于卡尔曼滤波器的参数估计法[13]、盲源分离法[14]等。该方法优点在于不需要外部扰动注入设备,对系统不会产生影响。但是由于只能利用现有的谐波与噪声信号,谐波分布随机性强,无法保证始终在宽频带范围内均具有有效的谐波激励,致使阻抗测量精度不高。
为了提高测量精度,主动测量法采用外部设备向系统注入谐波扰动,并采集端口电压电流响应信号进行阻抗计算。通过选择注入不同的扰动信号即可达到不同的测量要求[15]。按扰动注入信号的不同可以分为:单正弦信号、随机脉宽调制信号、方波信号、伪随机二进制序列信号(Pseudo-Random Binary Sequence, PRBS),包括最大长度二进制序列(Maximum Length Binary Sequence, MLBS)和离散区间二进制(Discrete Interval Binary Sequence, DIBS)、三阶序列信号(Ternary Sequence Signal, TSS),鸟鸣信号(chirp signal)、多正弦信号(multi-sine signal)等,以上信号除单正弦信号外均为宽频带信号。①改进的单正弦调制电流注入实现了单频阻抗测量,但是需要多次注入,耗时较长[16];②为了提高阻抗测量的快速性,RPWM信号可实现宽频阻抗测量,但其频谱不可控且有频谱泄漏现象[17];③叠加方波信号也可进行宽频阻抗测量,但是在高频段信号幅值衰减很大,信噪比很低,测量精度不高[18];④PRBS和MLBS信号都属于可控的宽频带信号,分别注入PRBS信号[19]和MLBS信号[20],只需一次注入即可获得宽频范围内的阻抗特性,但PRBS与MLBS信号的频谱可控性有限,频谱能量随着频率的增大而衰减,因此在频率较高的场合下,测量精度较差;⑤围绕此类宽频带扰动序列的优化,提出了DIBS信号[21],这是一种频谱可控的信号,可以指定谐波频率点使其功率谱线强度最大化,相较于MLBS信号更加灵活,但仍然无法消除不需要的频率分量;⑥TSS信号同样是在MLBS的基础上进行的一种优化[22],相比于MLBS信号具有更高的信噪比,但是只具有有限的幅频特性调节能力;⑦鸟鸣信号作为一种频带双边可控的信号,信号能量主要分布在设定频带内,被广泛用于阻抗测量的研究中[23];⑧多正弦信号能完全消除不需要的频率分量,信号能量在设定频率之间平均分配,具有极佳的频谱能量分布设计能力[24]。现有的阻抗测量装置的设计主要是面向中低压配电网、新能源发电装备及微电网系统,对牵引供电系统阻抗测量装置的相关研究较少,且大多是单频扫描式,需要重复多次注入,测量时间较长[25]。为提高测量效率,有学者提出利用开关管投切电阻负载来实现宽频带阻抗测量[26],测量耗时较单频扫描式大幅缩短,但投切过程中也存在过高的电压暂态冲击,大功率电阻耗能大、发热严重,对牵引供电系统来说属于恶性负载。
针对上述问题,本文以牵引供电系统为对象,提出一种适用于牵引供电系统的可控宽频带阻抗测量装置及其控制方法,重点介绍了提出的多电平滞环电流控制方法,相比于传统的滞环电流控制方法,具有更低的开关频率,能改善输出电流的波形,在开关状态切换的稳态过程中仅伴随一个开关器件的动作,不会发生同一桥臂的开关管同时导通的情况,能够有效避免死区效应的发生。最后通过仿真和硬件在环实验验证了本文所提牵引供电系统可控宽频带阻抗测量技术的有效性。
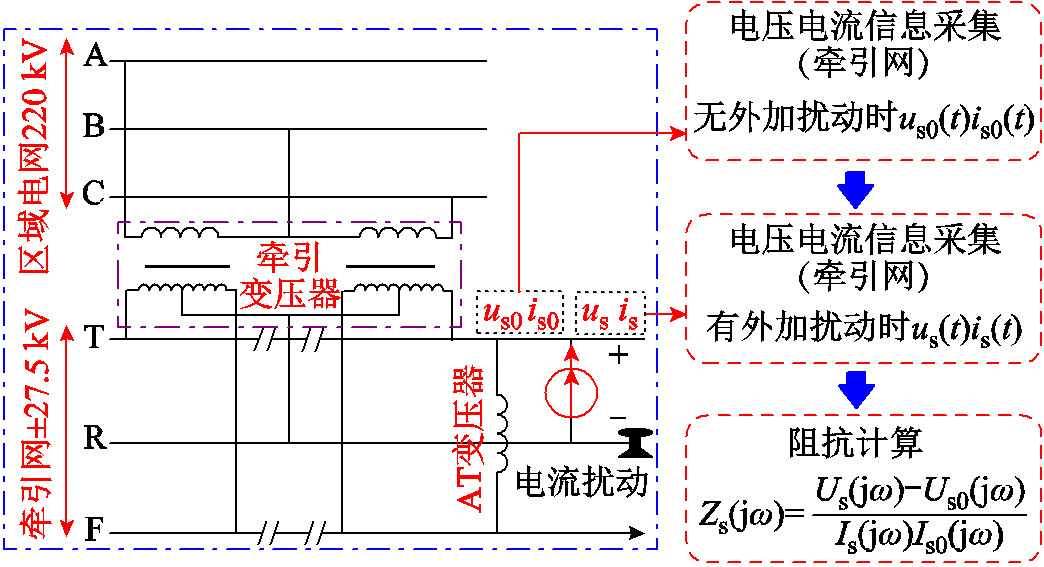
目前,由于自耦变压器(Auto Transformer, AT)供电方式具有供电距离长、钢轨电位低、对通信线路干扰小等优点,被广泛应用于高速、重载等大电流运行的场合。本文以AT供电方式下的牵引供电系统为测量对象,其阻抗测量原理如图1所示。
图1 牵引供电系统阻抗测量原理
Fig.1 Schematic diagram of impedance measurement of traction power supply system
牵引供电系统阻抗测量的基本步骤如图2所示。首先设定阻抗测量的频带范围[fmin, fmax],考虑到实际牵引供电系统背景谐波的影响,需在系统无外加谐波扰动激励时,采集端口处的时域电压电流us0(t)、is0(t);然后将目标测量频带的电流扰动并联注入牵引供电系统后,再次采集端口处的时域电压电流响应us(t)、is(t);最后通过快速傅里叶变换(Fast Fourier Transform, FFT)将上述时域信号转换成频域信号Us0(jw)、Is0(jw)、Us(jw)、Is(jw),并利用式(1)计算牵引供电系统的阻抗特性[23]。
 (1)
(1)
式中,Zs(jω)为系统的等效阻抗;Us0(jω)、Is0(jω)分别为系统无外加扰动时测量端口处的频域电压、电流;Us(jω)、Is(jω)分别为系统施加电流扰动后测量端口处的频域电压、电流。
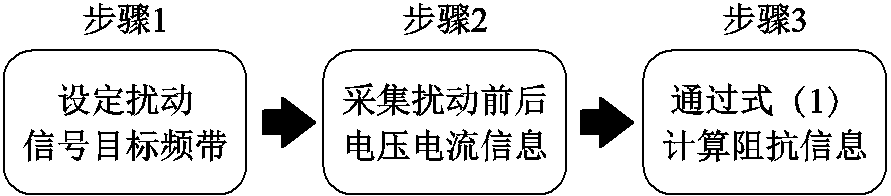
图2 阻抗测量步骤
Fig.2 Steps of impedance measurement
牵引供电系统中现有的阻抗测量拓扑主要有:基于级联H桥变流器的扰动拓扑[25]和基于反串联IGBT投切电阻的扰动拓扑[26]。前者原理是将单频扰动信号叠加在调制波上,每次注入需要重新修改控制中的指令信号,且一次只能输出一个频率的谐波电流,因此存在以下不足:①反复多次的单频扰动谐波注入、信号采集、阻抗计算等环节使得阻抗测量过程繁琐且耗时长;②实际系统的运行状态具有时变特性,致使其宽频带阻抗特性随时间动态变化,单频扫描式阻抗测量结果是将不同时刻各个频率点处的阻抗拼凑而成,无法实时获取同一时刻下被测系统的宽频带阻抗特性,使得阻抗测量结果的精确性、可靠性难以保证;③在能量传输的过程中,维持直流侧电压稳定的同时仍需要产生谐波电压,交直流侧谐波耦合严重,导致直流侧电压的波动较大,影响谐波的输出效果。
对于基于反串联IGBT投切电阻的扰动拓扑,采用分段Chirp-PWM控制信号,驱动反串联IGBT投切电阻,使得电流发生畸变,从而产生目标频带的宽频扰动,提高了阻抗测量的快速性,但仍存在如下不足:①扰动能量在非目标频段存在泄漏,降低了目标扰动频带中宽频谐波的信噪比;②分段Chirp-PWM信号的产生过程依赖于锁相环,电流扰动频谱分布的均匀性受起始扰动位置的影响较大;③在开关器件投切电阻过程中存在较高的电压暂态冲击,大功率电阻耗能大、发热严重。
为解决上述不足,本文提出了嵌入储能单元的可控宽频带阻抗测量装置,其整体系统结构如图3所示。该装置主要包括四部分:电流扰动单元、信号采集单元、宽频带阻抗计算与监控单元、继电保护单元。电流扰动注入单元通过升压变压器向系统中并联注入扰动电流。信号采集单元负责获取牵引供电系统测量端口处的电压电流响应信息,并实时传输到宽频带阻抗计算与监控单元。宽频带阻抗计算与监控单元根据信号采集单元的电压电流响应,计算出牵引供电系统的宽频带阻抗。同时宽频带阻抗计算与监控单元也是人机交互单元,实时显示宽频带阻抗频域特性曲线,实现对阻抗测量装置的切换操作。继电保护单元主要负责阻抗测量装置的安全运行。
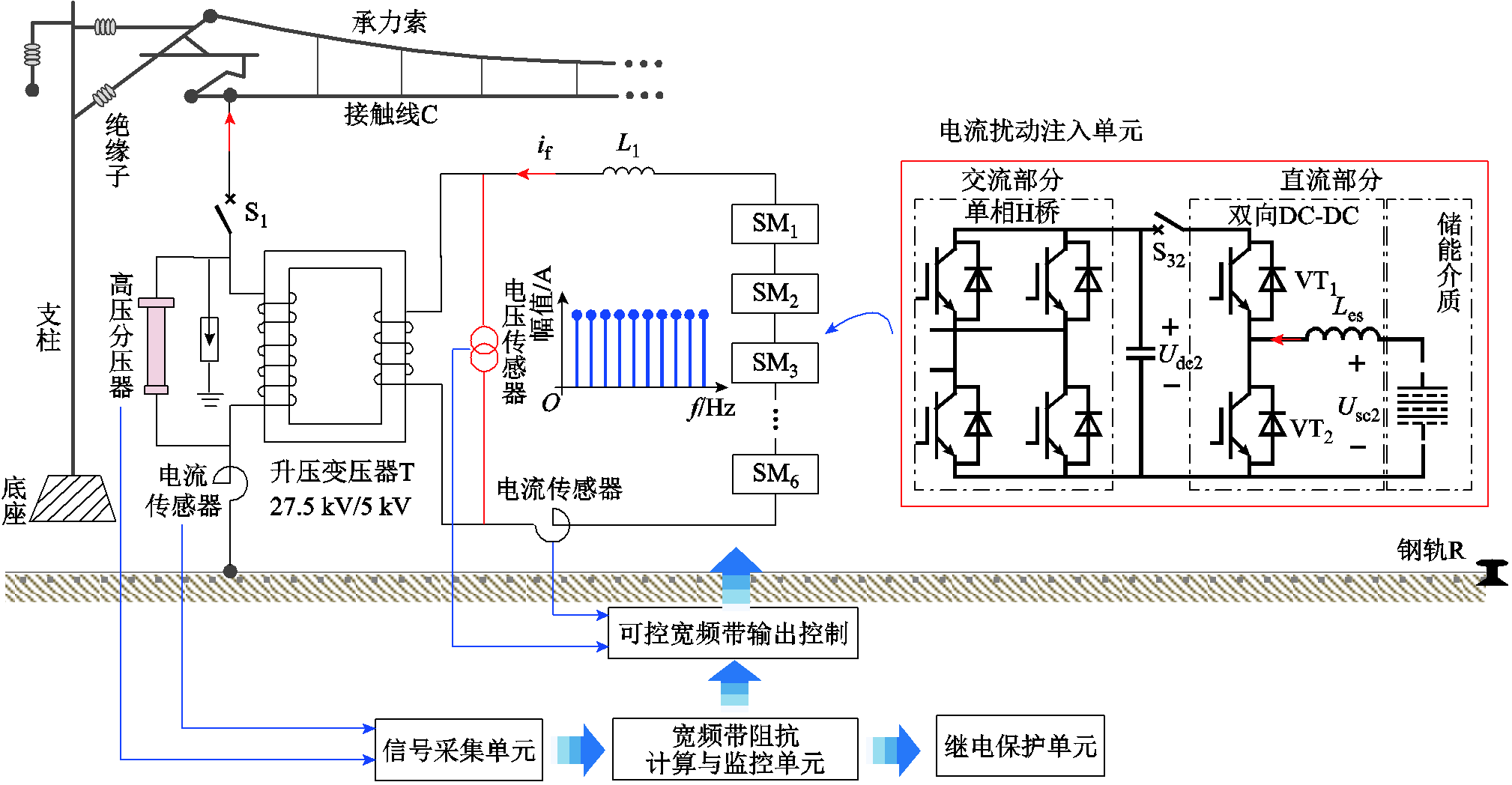
图3 可控宽频带阻抗测量装置整体系统结构
Fig.3 The overall system structure of controllable broadband impedance measurement device
在嵌入储能单元的可控宽频带阻抗测量装置的各单元中,重点和难点在于电流扰动单元如何可靠地产生幅值和频率都可控的宽频谐波电流扰动,因此下文将聚焦于电流扰动单元拓扑设计及相应控制方法的介绍。
如图3中所示,电流扰动注入单元由六个子模块SM1、SM2、…、SM6级联而成,其输出谐波电流经滤波电感滤除杂波,通过升压变压器并联注入牵引供电系统中。级联的目的是为了提高电压等级,以适用于牵引供电系统这种高压大功率的场合,并且能有效提高其等效开关频率,改善谐波扰动电流的输出效果。每个级联模块由直流部分与交流部分构成,直流部分包括储能介质(超级电容)和双向DC-DC直流变换器,经过支撑电容为交流部分的单相H桥提供产生谐波电流所需的直流电源。该拓扑的特点在于可以实现功率的双向流动,即装置接入牵引供电系统后,首先从牵引供电系统取电,经过级联H桥整流向储能介质充电,达到设定值后切换到谐波模式。相比于上述阻抗测量装置拓扑结构,该拓扑具有以下优势:
1)可一次性注入可控的宽频带扰动,获取牵引供电系统宽频带阻抗特性,极大地提高了测量效率,能够适应时变阻抗的测量需求。
2)直流侧电压通过储能单元维持稳定,波动较小,产生的谐波扰动频谱集中度高、泄漏量小。
3)不含电阻,能量损耗小,在测量过程中无需担心装置因电阻的存在而发热严重等情况。
总的来说,储能单元的嵌入使得装置具备“即插即用”的功能,避免了扰动注入与从系统取电同时进行,相比于额外的整流环节,其能够提供更稳定的直流电压。
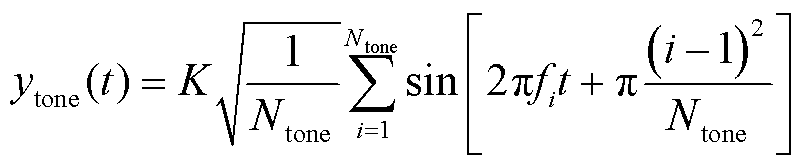
通过比较多种宽频带信号的优劣,本文电流扰动单元中参考信号采用频谱可控性最高的多正弦信号,其表达式[27]为
 (2)
(2)
式中,K为信号的幅值增益;Ntone为频率点的个数; 为每个频率点的幅值;f1为设定的初始频率;fi为第i个谐波对应的频率;[f1,fNtone]为信号的频率范围;π(i-1)2/Ntone为第i个正弦信号的相位。
为每个频率点的幅值;f1为设定的初始频率;fi为第i个谐波对应的频率;[f1,fNtone]为信号的频率范围;π(i-1)2/Ntone为第i个正弦信号的相位。
例如,图4所示为设定频率为20~80 Hz(初始频率f1=20 Hz,最大频率fNtone=80 Hz,频率点个数Ntone=31),频率间隔=2 Hz,每个频率点幅值为1 A(幅值增益K为5.57, =1)时的多音调信号波形。通过对其参数进行设计可以看出其频谱能量能在指定的频率范围(20~80 Hz)内均匀分配,每个频率点的幅值为设定值1 A,并且不会泄漏到其他频率点上。
=1)时的多音调信号波形。通过对其参数进行设计可以看出其频谱能量能在指定的频率范围(20~80 Hz)内均匀分配,每个频率点的幅值为设定值1 A,并且不会泄漏到其他频率点上。
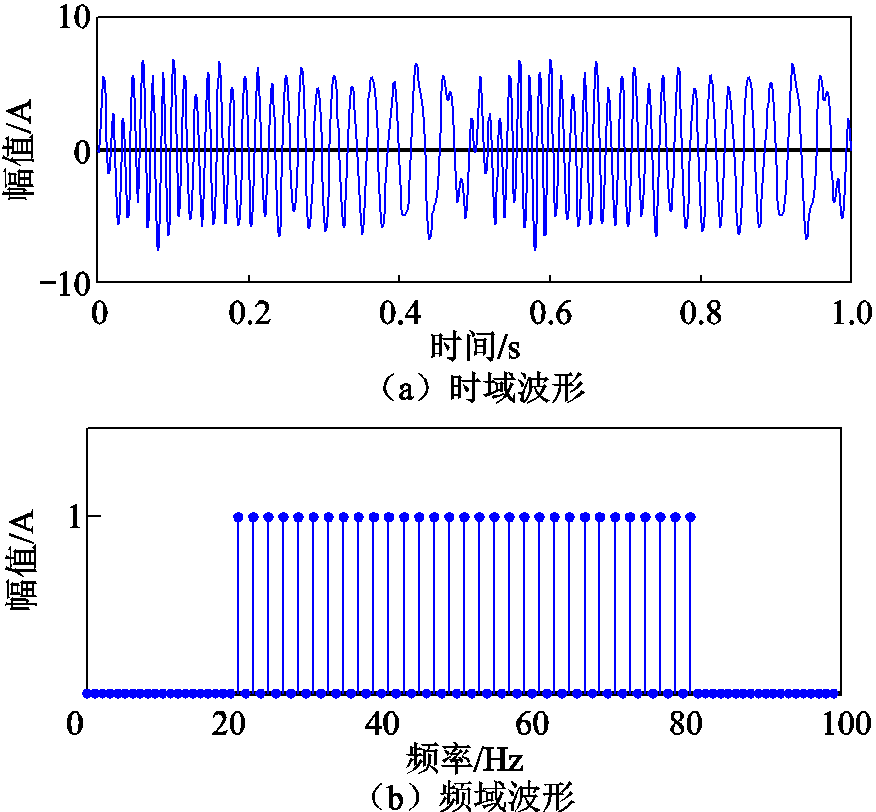
图4 多正弦信号
Fig.4 Multiple sinusoidal signal
电流扰动注入单元中,双向DC-DC变换器充放电以及级联H桥变流器整流的控制策略已较为成熟,而本文的重点在于电流扰动注入单元逆变时如何产生宽频带可控的扰动电流,因此下文将聚焦于所提多电平滞环电流控制方法的介绍。本文中的控制目标包括:①各频率点电流谐波分量的幅值可调;②电流扰动的频率范围为10~5 000 Hz;③最多可同时对20个频率点进行谐波激励。
传统的逆变器控制方法如比例-积分(Proportional Integral, PI)控制及比例-谐振(Proportional Resonant, PR)控制,适用于基频信号的无静差跟踪,若要实现多个频率点的跟踪,则需要设置多个PI环节或PR环节,参数难以确定,不适用于宽频信号的控制。有限集模型预测控制方法中的单相H桥级联模块数与开关状态数量呈指数关系,当级联模块数较多时,计算复杂度很高,需要大量计算资源和时间,不适用于高频信号的快速跟踪[28]。无差拍控制过于依赖精确的数学模型,控制精度受模型参数和数字控制延时的影响较大,不适用于高频信号的跟踪控制[29]。相比于以上几种控制方法,滞环电流跟踪控制方法具有跟踪精度高、动态响应快、不依赖参数等优点,适用于幅值和频率变化较快的宽频信号的跟踪控制,但其具有开关频率高、无法消除死区效应等缺点,导致造成过大的开关损耗和电磁干扰,使得器件选型困难,并且会影响逆变器输出频谱特性。因此,在保证宽频信号跟踪效果的前提下应尽可能减少功率半导体器件的开关次数,从而减小开关损耗。
本文在文献[30]的基础上,提出了一种适用于电流扰动注入单元的多电平滞环电流控制方法,极大程度地降低了开关频率,从而改善输出电流的频谱特性。下文将对多电平滞环电流控制方法进行重点介绍。
多电平滞环电流控制的目的是通过增加端口电平数使输出电流变化率接近参考电流的变化率,从而提高跟踪效果和等效开关频率。为方便分析,将电流扰动注入单元中的直流部分等效为直流电压源,将变压器低压侧等效为交流电压源,可以得到图5所示的等效电路,if、us分别为端口输出电流和交流侧电压。
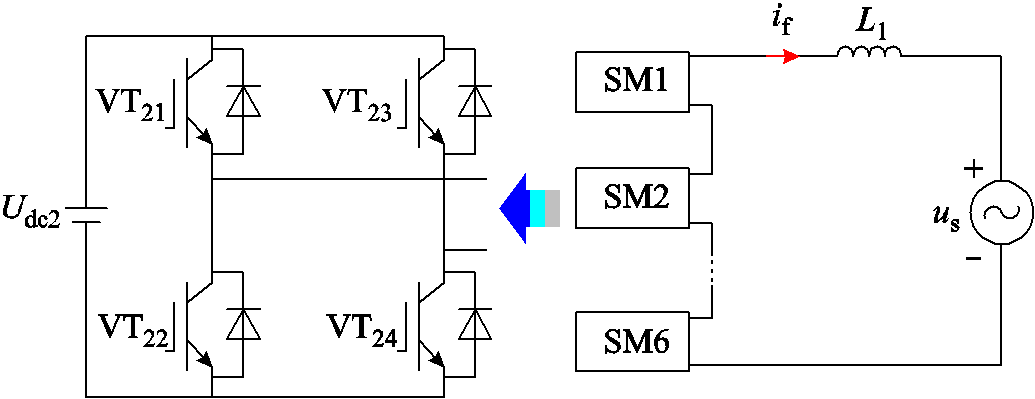
图5 电流扰动注入单元等效电路
Fig.5 Equivalent circuit of current disturbance injection unit
对于单个单相H桥模块,滞环电流控制等效电路如图6所示,iref、ei分别为指令电流和误差电流;端口输出电压UAB在不同的开关状态下输出不同的电平。在输出电流if不同方向时,各开关状态与端口输出电压UAB的对应关系见表1。从表1可以看出,开关状态S1和S2可以分别获得+Udc电平和-Udc电平;开关状态S0、S8在输出电流正半周内可以获得0电平电压,开关状态S3、S7在输出电流负半周内可以获得0电平电压;开关状态S6在输出电流正半周内可以获得-Udc电平,在输出电流负半周内可以获得+Udc电平。本文提出的开关切换策略采用S0~S8之间的相互切换来实现单模块三电平滞环电流控制:在输出电流正半周内,通过选择开关状态S0、S8来实现0电平电压,选择开关状态S1实现+Udc电平电压;在输出电流负半周内,通过选择开关状态S3、S7实现0电平电压,选择开关状态S2实现-Udc电平电压;根据需要选择开关状态S6实现±Udc电平的切换。
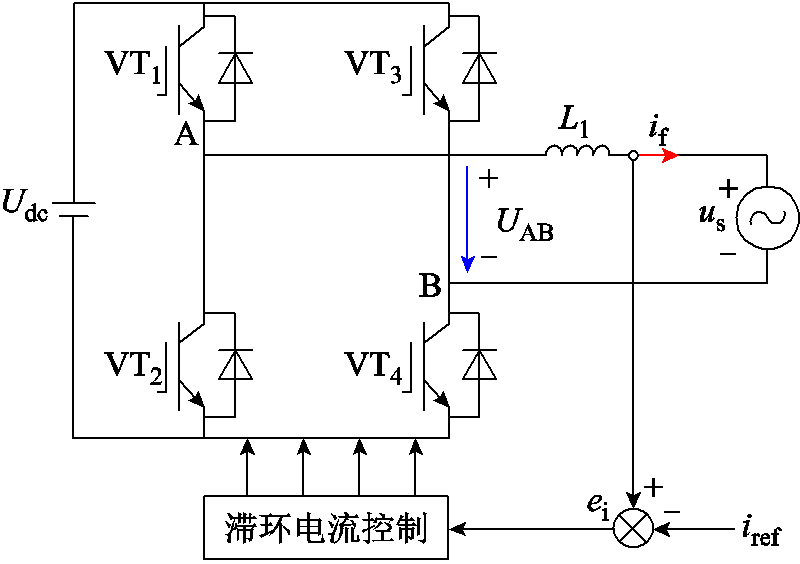
图6 滞环电流控制等效电路
Fig.6 Equivalent circuit of hysteretic current control
表1 开关状态
Tab.1 Switching state
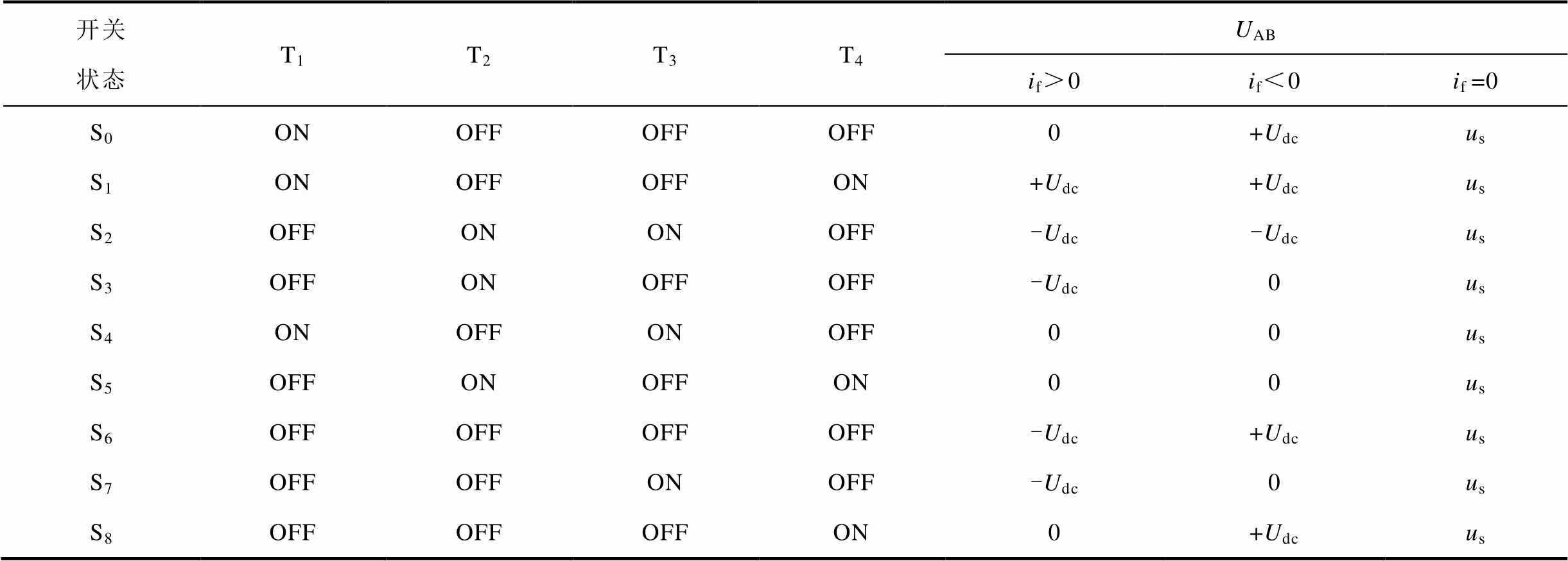
开关状态T1T2T3T4UAB if>0if<0if=0 S0ONOFFOFFOFF0+Udcus S1ONOFFOFFON+Udc+Udcus S2OFFONONOFF-Udc-Udcus S3OFFONOFFOFF-Udc0us S4ONOFFONOFF00us S5OFFONOFFON00us S6OFFOFFOFFOFF-Udc+Udcus S7OFFOFFONOFF-Udc0us S8OFFOFFOFFON0+Udcus
图7a、图7b所示分别为输出电流正方向和负方向时单模块三电平滞环电流控制的波形示意图,图中h为滞环环宽。在控制过程中,期望在开关状态S1被选择时,输出电流以正斜率上升,误差电流ei增大;在开关状态S2时,输出电流以负斜率下降,误差电流ei减小;在开关状态S6时,在输出电流正半周,效果等同于开关状态S2,误差电流ei减小,在输出电流负半周,效果等同于开关状态S1,误差电流ei增大;在开关状态S0、S8、S3、S7输出0电平电压时,误差电流ei的变化取决于仅输出电流if和指令电流iref的斜率,若输出电流斜率较小,则使得误差电流ei减小,在输出电流正方向时选择S0→S1→S8切换,输出电流负方向时选择S3→S6→S7切换,若输出电流斜率较大,则使得误差电流ei增大,在输出电流正方向时选择S0→S6→S8切换,输出电流负方向时选择S3→S2→S7切换。
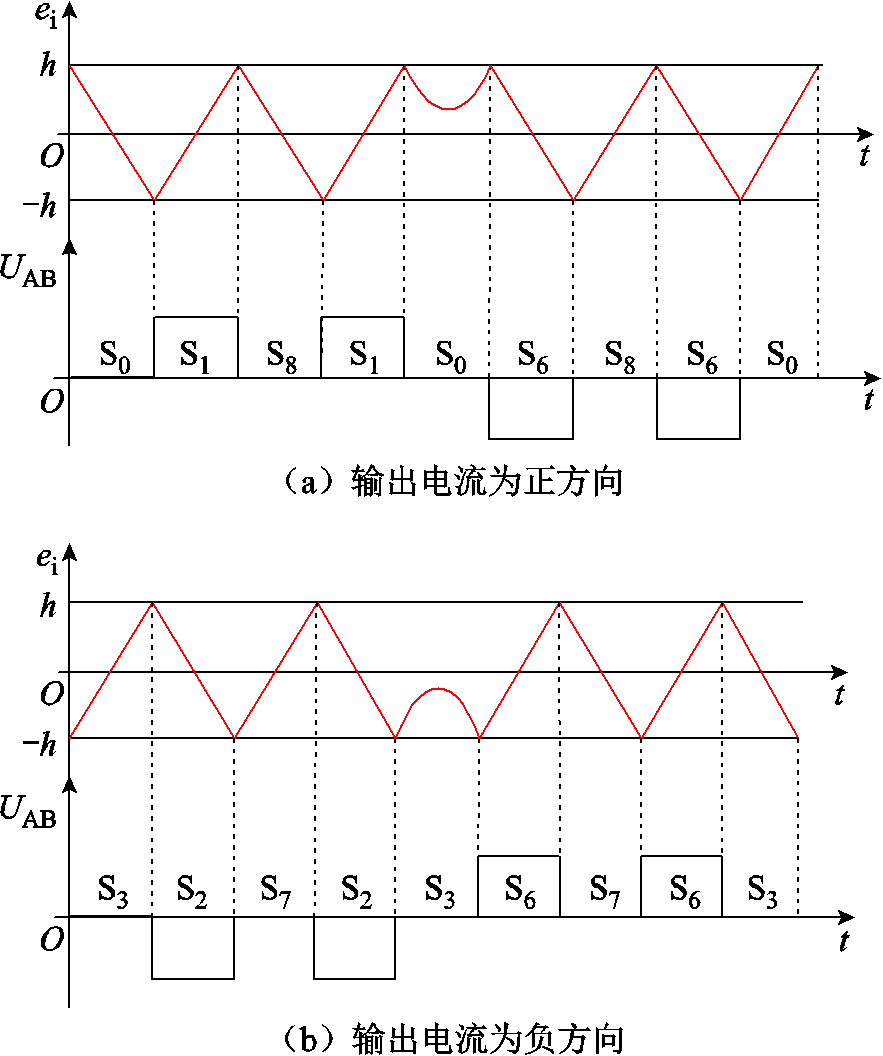
图7 单模块三电平滞环电流控制的波形示意图
Fig.7 Waveforms of the single module three-level hysteresis current control
要实现上述输出效果,需要满足前提:在开关状态S1被选择时,输出电流大于0,且输出电流上升斜率大于参考电流的上升斜率;在开关状态S2被选择时,输出电流小于0,且输出电流下降斜率小于参考电流的下降斜率,即
 (3)
(3)
电感电压与输出电流的关系为
 (4)
(4)
式中,uL为电感电压。结合式(4)可得
 (5)
(5)
 (6)
(6)
式中,直流电压Udc和交流电压us已知;参考电流的斜率可通过计算得到;通过计算电感L的值即可实现上述输出效果,但电感不宜过小,否则会影响谐波电流的输出效果。
上述控制策略需要四个比较器来实现稳态情况下开关状态的切换,将误差电流限制在环宽h内。比较器1用于误差电流与环宽上阈值的比较,大于上阈值输出1,否则输出0,其输出用X表示;比较器2用于误差电流与环宽下阈值的比较,大于下阈值输出1,否则输出0,其输出用Y表示;过零比较器1用于误差电流取绝对值之后的斜率与0比较,远离环宽输出1,否则输出0,其输出用Z表示;过零比较器2用于输出电流if与0比较,大于0输出1,否则输出0,其输出用T表示。
给出稳态工作情况下的单模块三电平滞环电流控制的开关状态切换过程如图8所示。根据输出电流if的方向,将开关状态划分为两个区域(图中①和②),当输出电流方向不变时,开关状态在区域内进行切换;当输出电流发生改变,开关状态在区域之间进行切换。图中红色箭头线条表示误差电流超过环宽下阈值且继续减小;蓝色箭头线条表示误差电流超过环宽上阈值且继续增大;黑色圆圈表示误差电流在环宽内且没有向环宽外发展趋势;黑色双箭头线条表示区域之间对应开关状态的切换。
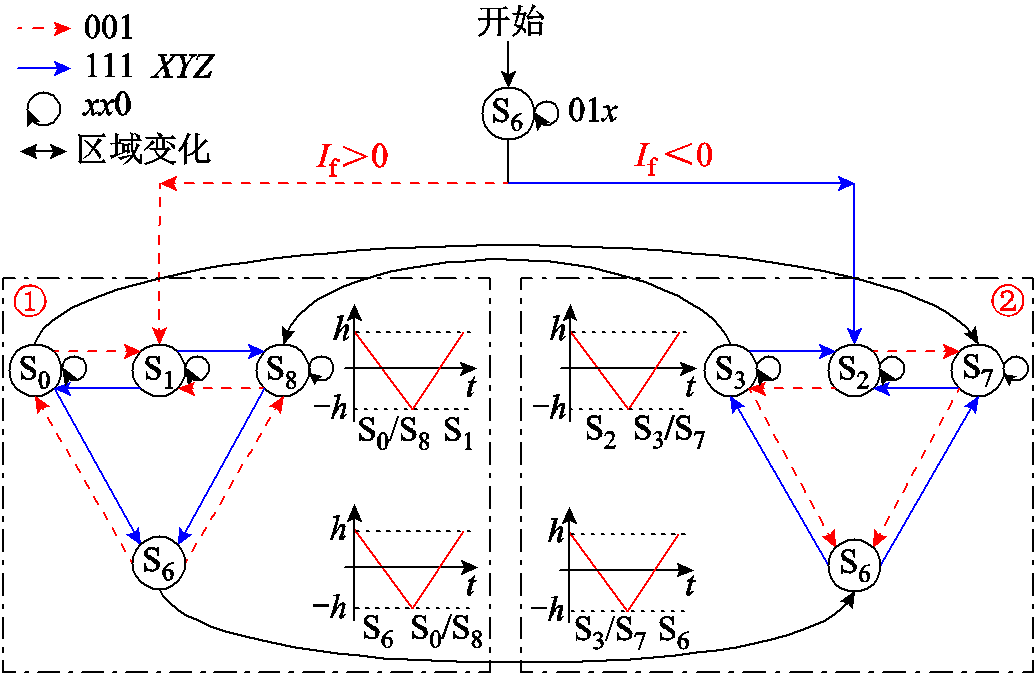
图8 单模块三电平滞环电流控制开关状态切换过程
Fig.8 Switch state switching process of the single-module three-level hysteresis current control
在区域内进行切换:在区域①,输出电流方向为正,选择S0、S8输出0电平电压,根据输出0电平电压时对误差电流的影响,选择在S0→S1→S8之间切换还是在S0→S6→S8之间切换;在区域②,输出电流方向为负,选择S3、S7输出0电平电压,根据输出0电平电压时对误差电流的影响,选择在S3→S2→S7之间切换还是在S3→S6→S7之间切换。
在区域间进行切换:由区域①→区域②,即输出电流方向由正到负,若当前开关状态为S0/S8,则切换到S7/S3;若当前开关状态为S1/S6,则开关状态保持不变。同理,由区域②→区域①的开关状态切换可通过类推得到。
通过对以上开关状态切换过程进行逻辑解码可以得出开关器件的平均开关频率是误差电流频率的1/2,并且区域①和区域②内开关状态之间的切换仅仅伴随一个开关器件的动作,不存在同一桥臂的开关器件同时导通的情况,因此能有效地避免死区效应。
电流扰动注入单元的6个子模块若采用相同的控制信号,即端口输出电压为0、6Udc、-6Udc电平,会在指令电流变化率较小的时刻使误差电流瞬间变大或变小,误差电流不能稳定被限制在设定环宽内,造成开关频率增大且不能有效避免死区效应。因此,电流扰动注入单元的每个模块都需要单独控制。
根据式(7)可以确定当前时刻误差电流变化趋势,式(7)成立时说明当前输出电流变化率较大,误差电流增大。
 (7)
(7)
电感的电压电流关系为
 (8)
(8)
式中,L为电感值;n为使误差电流增加的最小模块数,应为整数,本文通过向上取整对n取值。
联立式(7)、式(8)可以计算出使误差电流增加的最小模块数n,结合当前误差电流的状态,决定每个子模块输出的电平。图9所示为多电平滞环电流稳态控制的开关切换过程,图中数字表示计算出的n的值。当n=2时,若误差电流到达上阈值,此时应输出Udc电平使其减小;若误差电流到达下阈值,此时应输出2Udc电平使其增大,依此类推。通过上述切换,端口会输出13电平的电压,每个子模块输出对应电平的开关状态选取规则如前所述。
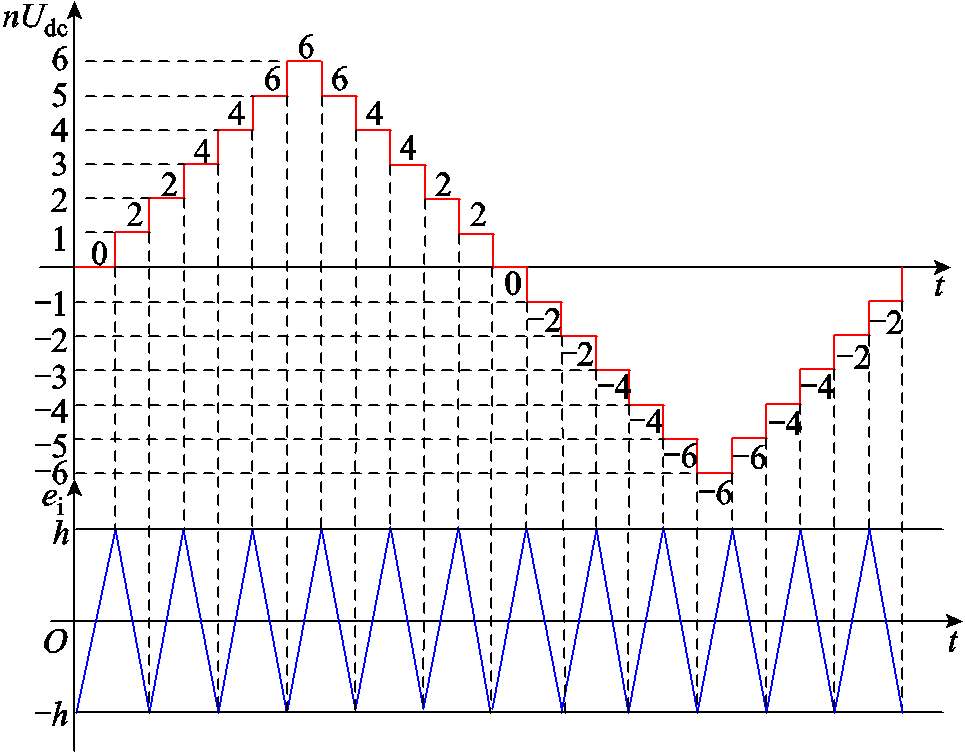
图9 多电平滞环电流稳态控制开关切换过程
Fig.9 Switching process of multilevel hysteresis current steady state control
同时,为保证输出电流能够跟踪上指令电流,其变化率应快于指令电流变化率,电感取值需要满足
 (9)
(9)
 (10)
(10)
在跟踪高频信号的过程中,指令电流变化过快可以视为指令电流的突变,系统会进入动态响应过程。为提高系统的动态响应性能,需要引入外环,外环环宽设置为内环环宽的2倍。指令电流突变时的开关状态切换见表2。以当前开关状态处于S0、S8、S1为例,如果指令电流向下突变导致误差电流大于外环上阈值,并且指令电流的方向仍然为正方向时,开关状态S6被选择,输出负载电流快速下降,待误差电流到达内环下阈值时,将开关状态切换到S1,从而进入稳态跟踪过程。开关状态处于其余情况时分析也与上述类似,具体切换过程不再赘述。
表2 指令电流突变时的开关状态切换
Tab.2 Switching state when instruction current suddenly changes

当前开关状态指令电流突变信息被选择的开关状态 幅值突变突变后的方向 nUdc向下>0(n-1)Udc 向下<0(n-1)Udc 向上>0(n+1)Udc 向上<0(n+1)Udc
根据输入信号和当前开关状态选择对应的开关状态输出,其控制逻辑见表3,W为过零比较器的逻辑输出,指令电流为正时输出1,否则输出0;U表示误差电流与外环上阈值的比较结果,大于上阈值输出1,否则输出0;V表示误差电流与外环下阈值的比较,大于下阈值输出1,否则输出0。从表3可见,只有当误差电流超过外环环宽时才会执行动态响应过程,从而严格控制误差电流在设定的外环环宽范围内。
表3 开关状态控制逻辑
Tab.3 Control logic of switch state
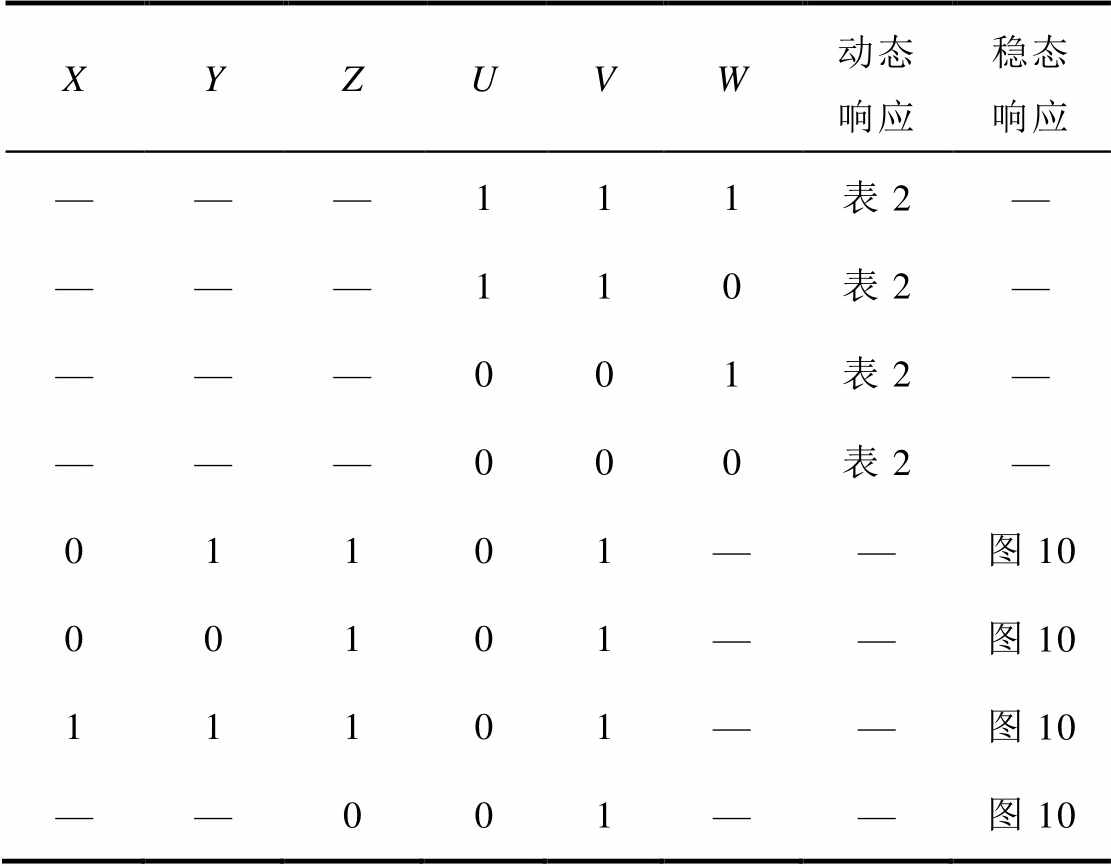
XYZUVW动态响应稳态响应 ———111表2— ———110表2— ———001表2— ———000表2— 01101——图10 00101——图10 11101——图10 ——001——图10
为了验证阻抗测量的准确性,本文基于多导体传输线模型(Multiconductor Transmission Line, MTL)[31],建立了如图10所示的牵引供电系统仿真模型,相应参数见表4。其中阻抗测量装置的仿真模型如图3所示,具体仿真参数见表5。
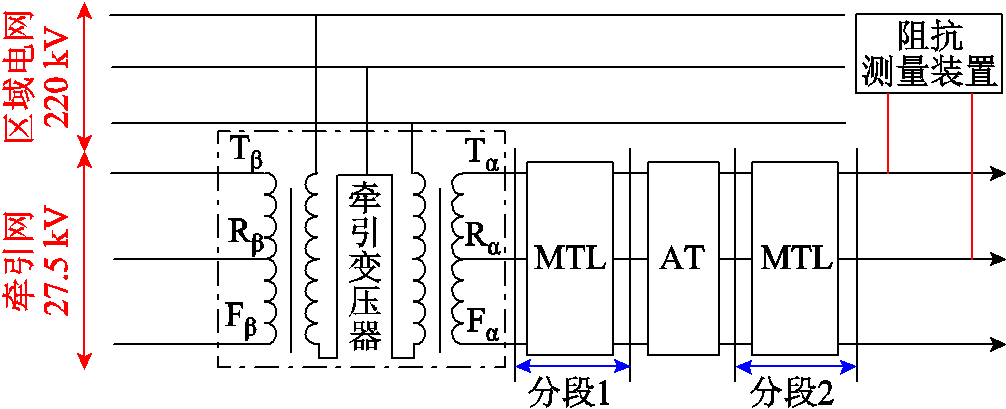
图10 牵引供电系统阻抗测量模型
Fig.10 Impedance measurement model of traction power system
表4 阻抗测量模型参数
Tab.4 Impedance measurement model parameters

参数数值 区域电网电压/kV220 牵引供电系统电压/kV27.5 牵引变压器接线方式V/x MTL段数2 每段距离/km12 测量频带范围/Hz1 500~3 500
表5 可控宽频带阻抗测量装置仿真参数
Tab.5 Simulation parameters of controllable broadband impedance measuring device

参数数值参数数值 网侧电压Uac/V5 000谐波电流幅值增益K50 频率f/Hz50储能侧额定电压/V1 500 储能侧电感Les/mH8储能侧初始电压/V1 200 支撑电容Ci/mF9直流侧电压/V1 500 谐波频率范围/Hz10~5 000环宽/A2
图11、图12分别为电流扰动单元输出频率为10~100 Hz(频率间隔为10 Hz)、4~5 kHz(频率间隔为50 Hz)时的仿真波形。从图中可知,输出电流跟踪误差能够限制在设定环宽以内,实际输出能够较好地跟踪参考电流,端口电压能实现多电平输出,并且输出电流频谱效果与参考电流频谱基本一致,能够实现等幅输出。
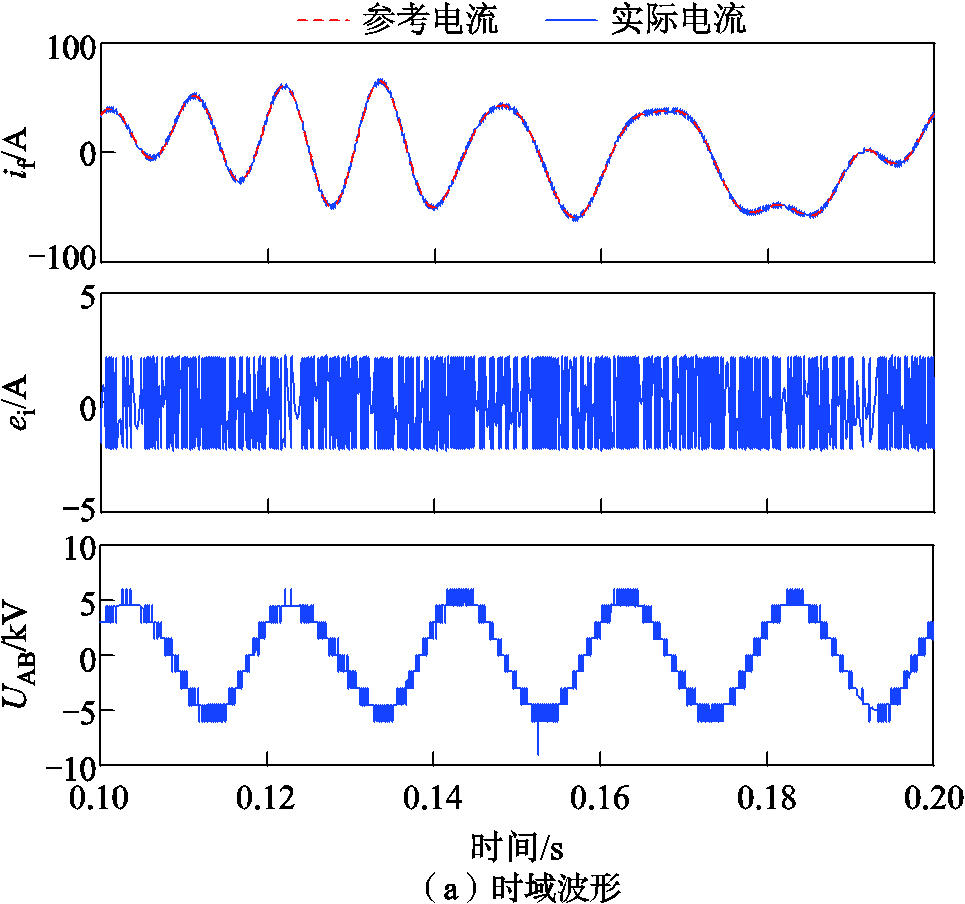
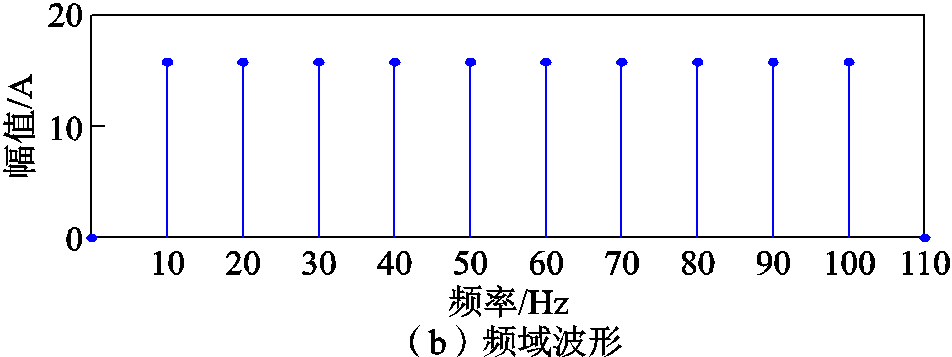
图11 10~100 Hz电流扰动仿真波形
Fig.11 10~100 Hz current disturbance injection waveforms
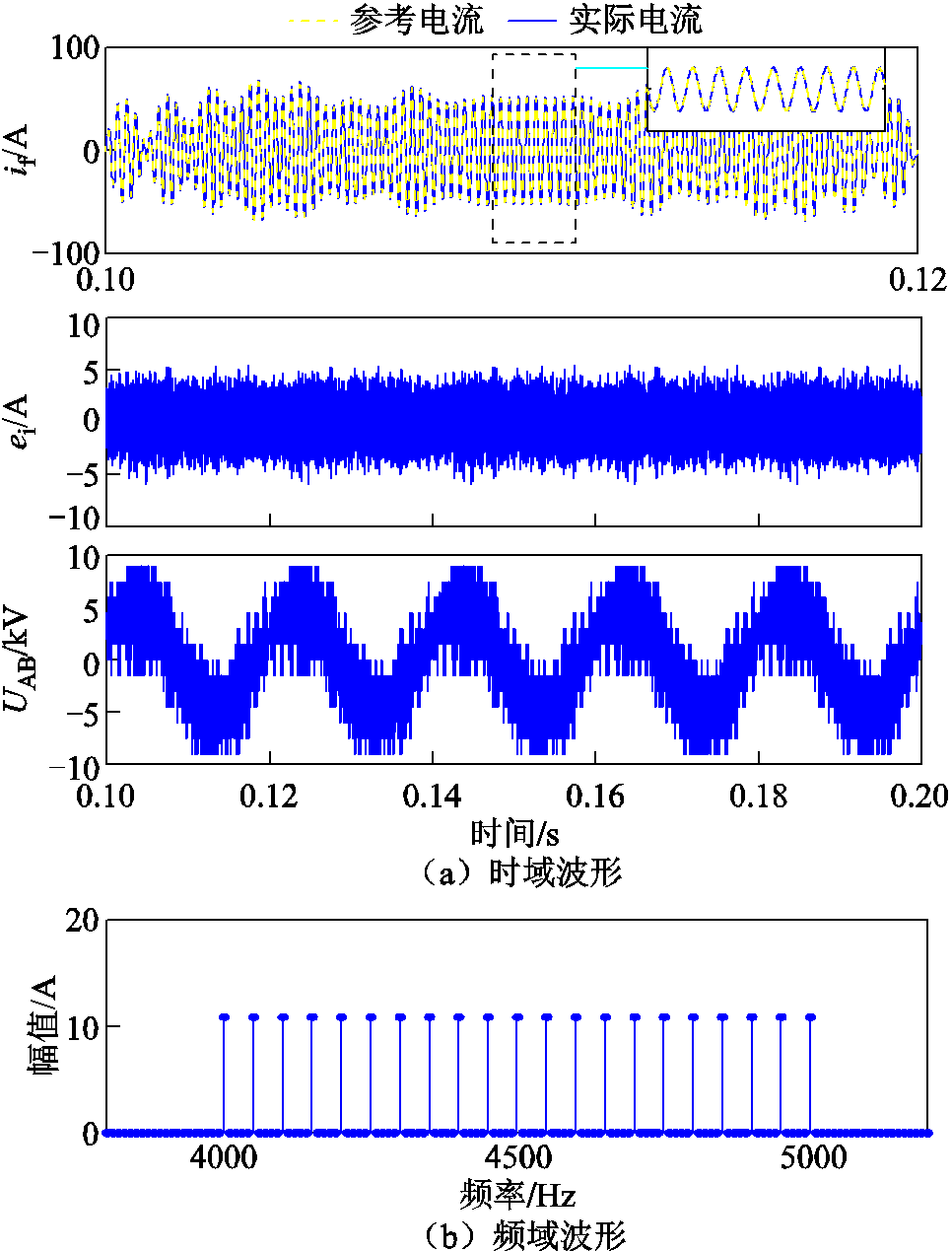
图12 4~5 kHz电流扰动仿真波形
Fig.12 4~5 kHz current disturbance injection waveforms
图13所示为本文所提的多电平滞环电流控制方法与传统滞环电流控制方法相比,在保持环宽为5 A的条件下跟踪1~2 kHz电流信号时,1 s内两种方法的开关次数。从图13中可知,设定环宽一致为5 A时,传统的滞环电流控制方法1s内的开关次数为50k,而多电平滞环电流控制方法开关次数为1.2k左右,极大地减少了开关器件的动作次数,并且其误差电流较传统方法更小,跟踪效果更好。
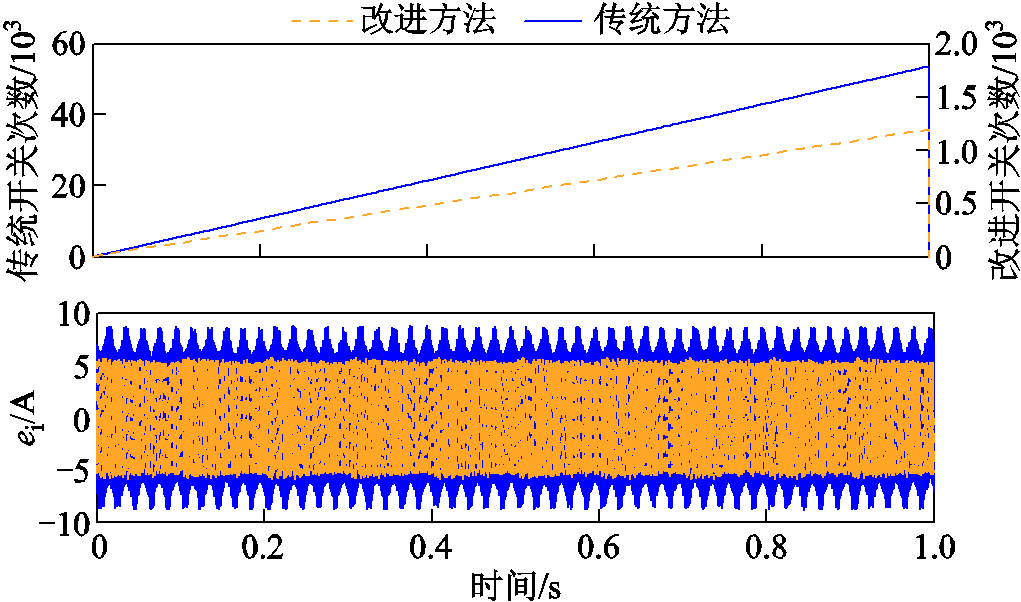
图13 两种控制方法的对比效果
Fig.13 The comparison effect of the two control methods
采用第1节所述的阻抗测量步骤,对建立的牵引供电系统模型进行阻抗测量,牵引供电系统1 500~3 500 Hz的阻抗测量结果和实际值如图14所示。可以看出在测量频带内,牵引供电系统频域阻抗测量值与实际值相匹配,但在测量频带外的阻抗部分,由于没有相应的扰动电流,因此测量值不准确。图15所示为牵引供电系统10~5 000 Hz的阻抗测量结果。可以看出测量结果和实际结果基本一致,验证了所提可控宽频带阻抗测量设计的有效性。
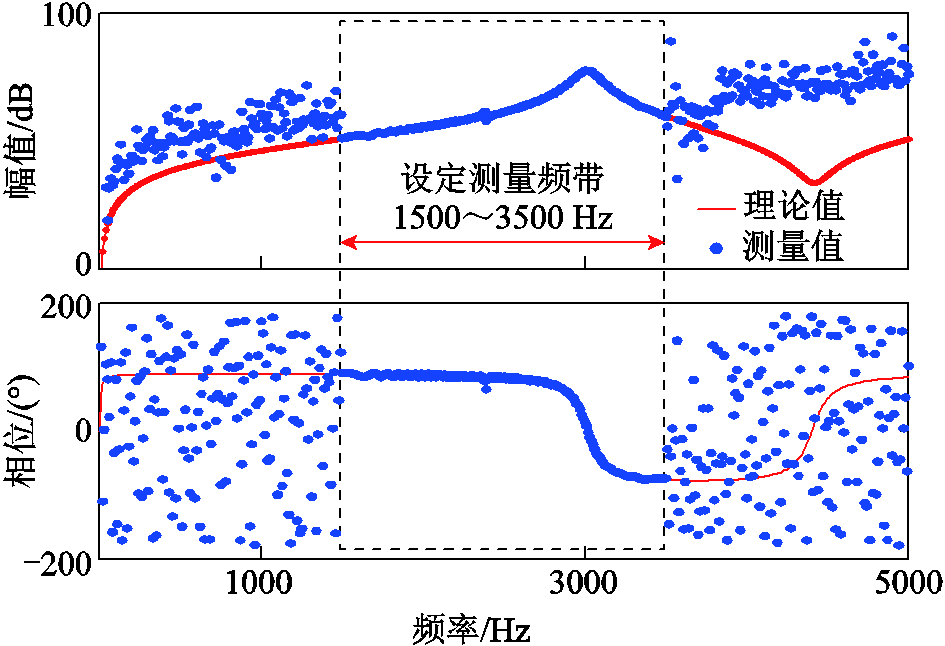
图14 牵引供电系统1 500~3 500 Hz的阻抗测量结果
Fig.14 Impedance measurement results of traction power system from 1 500 Hz to 3 500 Hz
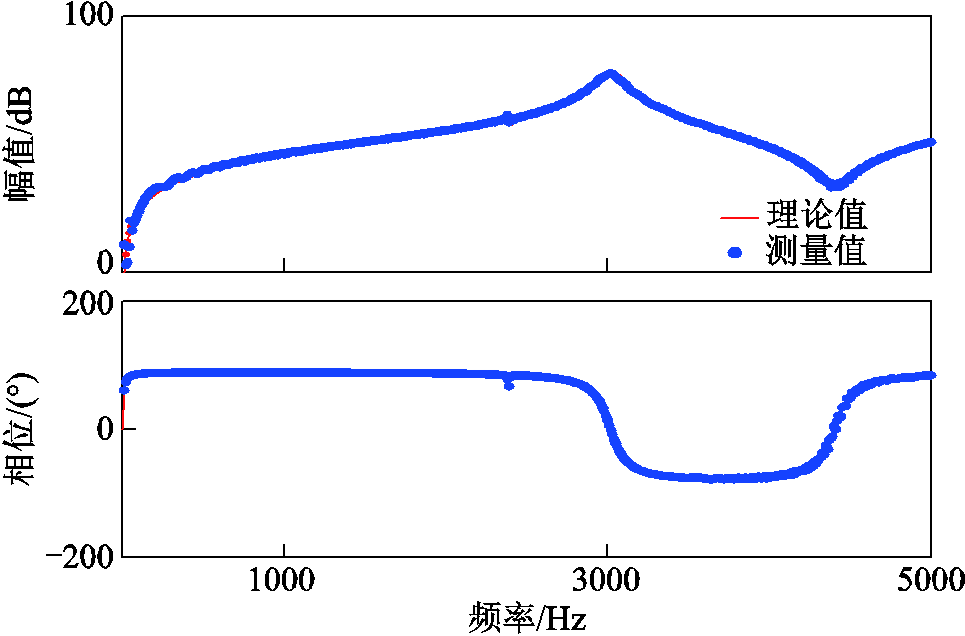
图15 牵引供电系统10~5 000 Hz的阻抗测量结果
Fig.15 Impedance measurement results of traction power system from 10 Hz to 5 000 Hz
为了验证所提方法的实际有效性,搭建了如图16所示的硬件在环实验台,阻抗测量装置的硬件电路在RT-BOX中实现,仿真周期为10 ms,信号采集频率为100 kHz;控制算法在DSP实时控制器(TMS320F28346)中实现,控制频率为20 kHz;RT-BOX的模拟输出(AO板卡)接DSP实时控制器的ADC板卡,ADC板卡将其输出的模拟量转换成数字量后送入DSP进行计算,DSP实时控制器的DO板卡输出的开关信号接RT-BOX的数字信号输入(DI板卡),控制主电路中功率器件的开断;DSP实时控制器的模拟输出(DAC板卡)接入示波器,用以观测装置输出谐波电流的波形。由于RT-BOX处理能力有限,元件较多时会超过其运行能力,因此搭建了图16中牵引供电系统阻抗测量模型的一段MTL来验证测量装置的有效性,装置采用三个模块级联,直流部分用直流源等效。
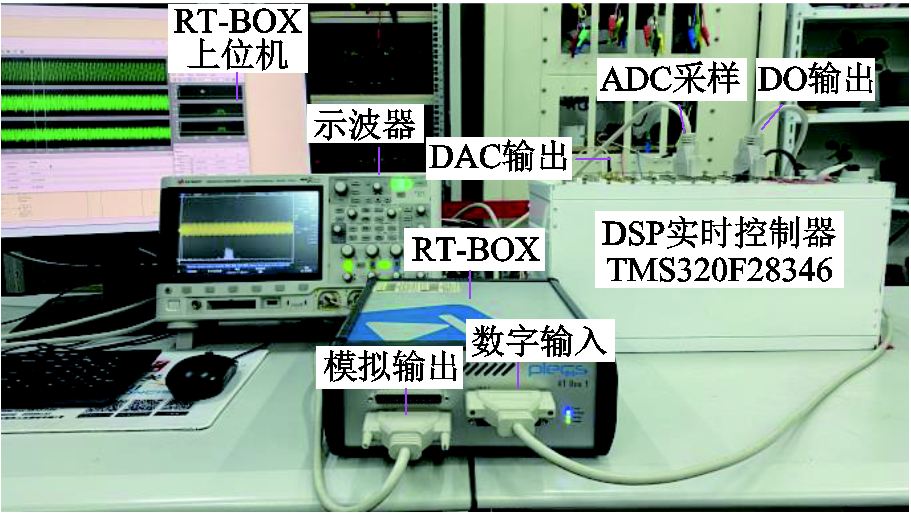
图16 硬件在环实验台
Fig.16 The experimental platform of hardware-in-the-loop
首先给出了1 210~1 400 Hz的谐波电流波形如图17所示,谐波电流幅值增益K设定为10,环宽设置为1 A,可见其能够实现设定频带(1 210~1 400 Hz)的谐波电流输出,且各个频率点幅值较为相近。
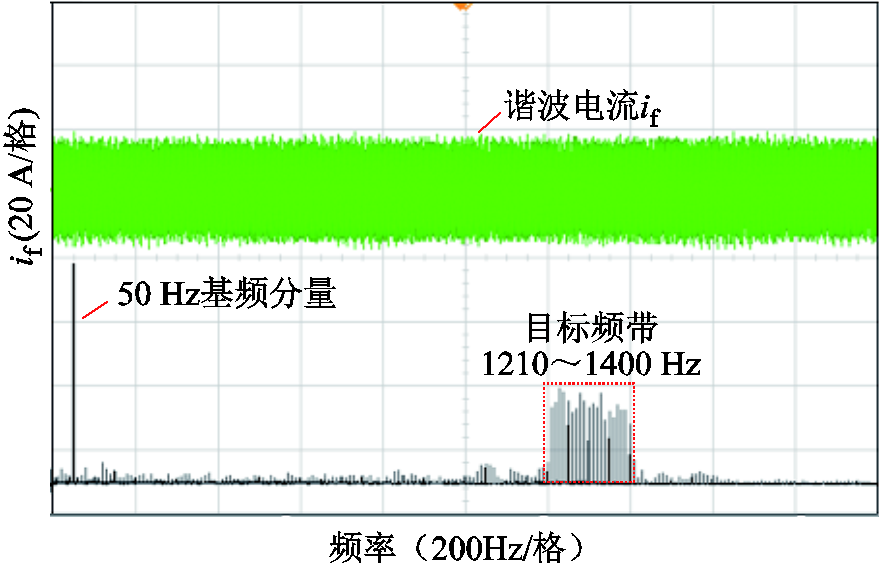
图17 1 210~1 400 Hz的谐波电流波形
Fig.17 Harmonic current waveform of 1 210 Hz to 1 400 Hz
根据前述阻抗测量步骤,将采集到电压电流响应数据后通过Matlab计算得到测量阻抗。图18给出了设定频带为2~3 kHz的阻抗测量结果。可以看出在设定频带2~3 kHz内,牵引供电系统频域阻抗测量幅值与相位均能与参考值相匹配,而在设定频带以外的区域,由于没有相应的谐波扰动电流注入,测量得到的阻抗不准确。图19给出了频率范围为10~5 000 Hz,频率间隔为10 Hz的阻抗测量结果,其中红色表示参考值,蓝色点表示硬件在环实验结果。可以看出,测量值在目标频带范围内与参考值匹配良好,验证了所提方法能够实现牵引供电系统10~5 000 Hz宽频范围内的阻抗特性测量。需要说明的是,真实的物理系统可能会存在开关次谐波带来的衍生成分,造成输出电流畸变,扰动能量分布的均匀度降低,但是大部分的扰动能量主要还是集中在设定频带,对目标频带的影响总体较小,因此对阻抗测量结果影响也较小,可以忽略。
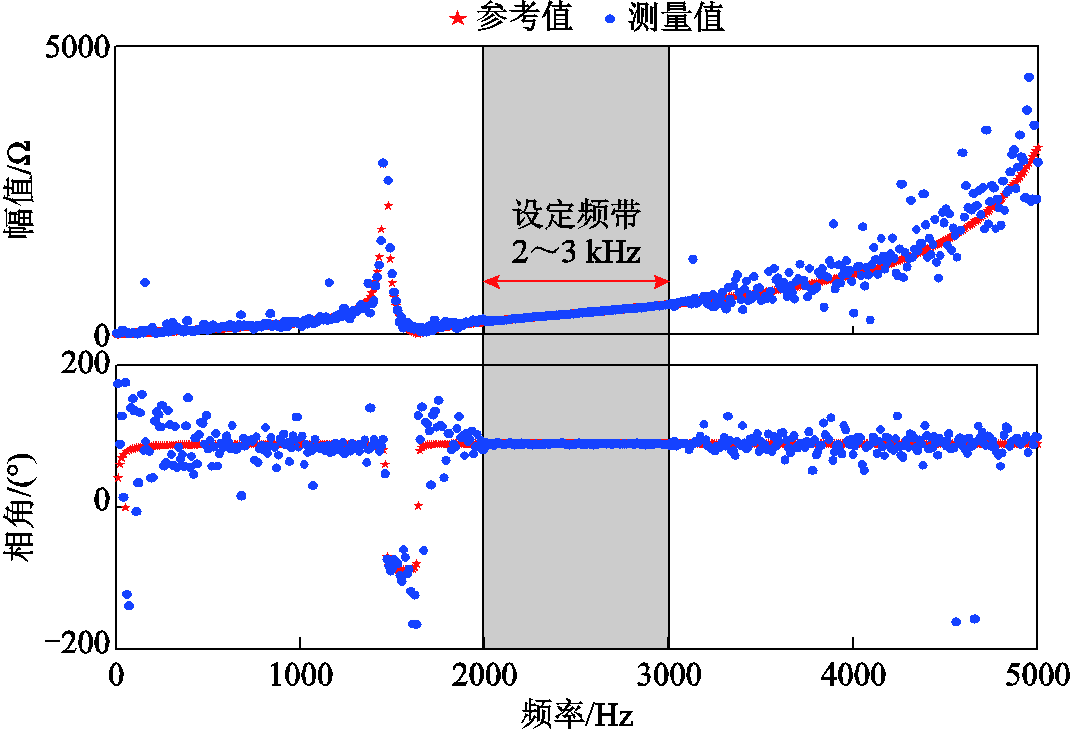
图18 2~3 kHz阻抗测量结果
Fig.18 Impedance measurement results from 2 kHz to 3 kHz
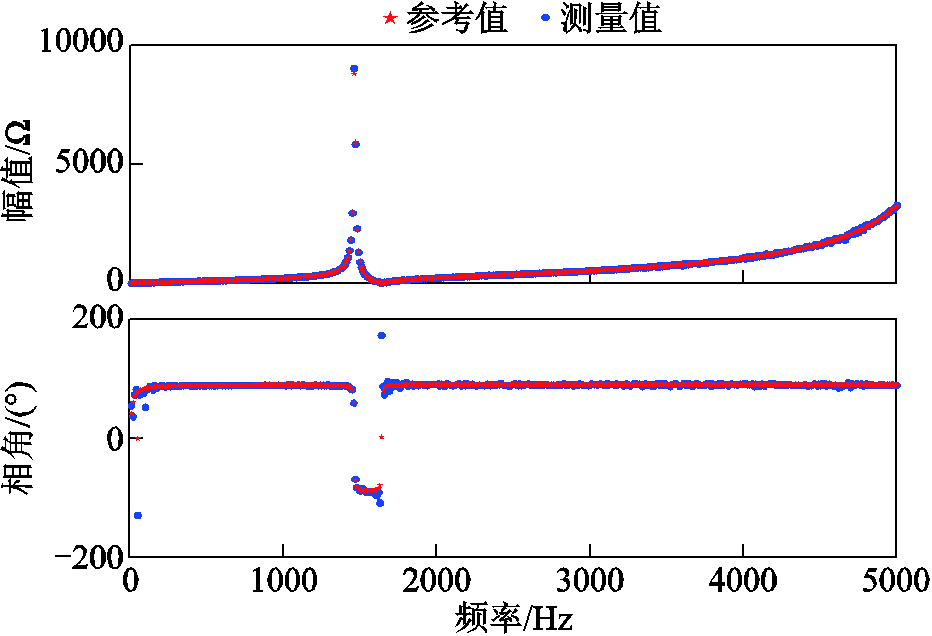
图19 10~5 000 Hz阻抗测量结果
Fig.19 Impedance measurement results from 10 Hz to 5 000 Hz
本文提出了一种基于多电平滞环电流控制的牵引供电系统可控宽频带阻抗测量技术,通过变压器向系统中并联注入幅值和频率都可控的宽频谐波扰动电流,只需一次注入即可获取设定频带内牵引供电系统的阻抗特性。最后通过仿真和半实物实验验证了所提方法的有效性与准确性。该技术具有以下优点:
1)不含有电阻,能量损耗小,在测量过程中无需担心装置因电阻的存在而发热严重等情况,且具有模块化结构,扩展方便,应用灵活。
2)可一次性向牵引供电系统注入频带和幅值可控的谐波电流,能够适应时变阻抗的测量需求。
3)利用多电平滞环电流控制方法,在跟踪精度相同的条件下,极大地减少了功率器件的开关次数,同时避免了死区效应,具有良好的应用潜力。
参考文献
[1] Zhou Yi, Hu Haitao, Yang Xiaowei, et al. Low frequency oscillation traceability and suppression in railway electrification systems[J]. IEEE Transactions on Industry Applications, 2019, 55(6): 7699-7711.
[2] 潘鹏宇, 胡海涛, 肖冬华, 等. 高速列车变流器“扫频式”dq阻抗测量中的频率耦合干扰机理及抑制策略[J]. 电工技术学报, 2022, 37(4): 990-999, 1009. Pan Pengyu, Hu Haitao, Xiao Donghua, et al. Frequency coupling interference mechanism and suppression strategy for frequency-sweeping-based dq impedance measurement of high-speed train converter[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 990-999, 1009.
[3] 袁佳歆, 曲锴, 郑先锋, 等. 高速铁路混合储能系统容量优化研究[J]. 电工技术学报, 2021, 36(19): 4161-4169, 4182. Yuan Jiaxin, Qu Kai, Zheng Xianfeng, et al. Study on capacity optimization of hybrid energy storage system for high-speed railway[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 4161-4169, 4182.
[4] 金程, 王小君, 姚超, 等. 基于改进禁区判据的电气化铁路车网耦合系统稳定性研究[J]. 电工技术学报, 2021, 36(21): 4459-4469. Jin Cheng, Wang Xiaojun, Yao Chao, et al. Study on stability of electrified railway vehicle-network coupling system based on improved forbidden zone criterion[J]. Transactions of China Electrotechnical Society, 2021, 36(21): 4459-4469.
[5] Bakhshizadeh M K, Blaabjerg F, Hjerrild J, et al. Improving the impedance-based stability criterion by using the vector fitting method[J]. IEEE Transactions on Energy Conversion, 2018, 33(4): 1739-1747.
[6] 伍文华. 新能源发电接入弱电网的宽频带振荡机理及抑制方法研究[D]. 长沙: 湖南大学, 2019. Wu Wenhua. Research on wide-bandwidth oscillation mechanism and suppression methods of renewable energy power generation connected to the weak grid[D]. Changsha: Hunan University, 2019.
[7] 李亚楼, 张星, 胡善华, 等. 含高比例电力电子装备电力系统安全稳定分析建模仿真技术[J]. 电力系统自动化, 2022, 46(10): 33-42. Li Yalou, Zhang Xing, Hu Shanhua, et al. Modeling and simulation technology for stability analysis of power system with high proportion of power electronics[J]. Automation of Electric Power Systems, 2022, 46(10): 33-42.
[8] 吴滨源, 李建文, 李永刚, 等. 用于谐波劣化分析的并网逆变器阻抗灰箱拟合方法[J]. 电工技术学报, 2022, 37(4): 942-953. Wu Binyuan, Li Jianwen, Li Yonggang, et al. A gray-box fitting method of grid-connected inverters impedance for the analysis of harmonic degradation[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 942-953.
[9] 李建文, 吴滨源, 李永刚, 等. 分析谐波劣化机理的逆变器灰箱宽频域矩阵模型及求解方法[J]. 电力系统自动化, 2020, 44(18): 155-163. Li Jianwen, Wu Binyuan, Li Yonggang, et al. Gray-box wide frequency domain matrix model of inverter for harmonic degradation mechanism analysis and its solution method[J]. Automation of Electric Power Systems, 2020, 44(18): 155-163.
[10] 谢少军, 季林, 许津铭. 并网逆变器电网阻抗检测技术综述[J]. 电网技术, 2015, 39(2): 320-326. Xie Shaojun, Ji Lin, Xu Jinming. Review of grid impedance estimation for gird-connected inverter[J]. Power System Technology, 2015, 39(2): 320-326.
[11] Ciobotaru M, Agelidis V, Teodorescu R. Line impedance estimation using model based identification technique[C]//Proceedings of the 2011-14th European Conference on Power Electronics and Applications, Birmingham, 2011: 1-9.
[12] Gu Herong, Guo Xiaoqiang, Wang Deyu, et al. Real-time grid impedance estimation technique for grid-connected power converters[C]//2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 2012: 1621-1626.
[13] Hoffmann N, Fuchs F W. Minimal invasive equivalent grid impedance estimation in inductive–resistive power networks using extended Kalman filter[J]. IEEE Transactions on Power Electronics, 2014, 29(2): 631-641.
[14] 王迎晨, 杨少兵, 宋可荐, 等. 基于谐波耦合机理的V/v接线牵引供电系统谐波阻抗辨识方法[J]. 中国电机工程学报, 2021, 41(11): 3818-3828. Wang Yingchen, Yang Shaobing, Song Kejian, et al. Harmonic impedance identification method of V/v connection traction power supply system based on harmonic coupling mechanism[J]. Proceedings of the CSEE, 2021, 41(11): 3818-3828.
[15] 岳小龙, 卓放, 张政华, 等. 电力电子系统阻抗测量的分段二叉树法[J]. 电工技术学报, 2015, 30(24): 76-83. Yue Xiaolong, Zhuo Fang, Zhang Zhenghua, et al. Segmented binary tree method for power electronic system impedance measurement[J]. Transactions of China Electrotechnical Society, 2015, 30(24): 76-83.
[16] 师洪涛, 卓放, 杨祯, 等. 基于改进正弦调制电流注入的三相交流电源系统谐波阻抗测量研究[J]. 电工技术学报, 2015, 30(8): 257-264. Shi Hongtao, Zhuo Fang, Yang Zhen, et al. Study of harmonic impedance measurement for three-phase AC power system based on an improved modulated current injection method[J]. Transactions of China Electrotechnical Society, 2015, 30(8): 257-264.
[17] Jordan M, Langkowski H, Do Thanh T, et al. Frequency dependent grid-impedance determination with pulse-width-modulation-signals[C]//2011 7th International Conference-Workshop Compatibility and Power Electronics (CPE), Tallinn, Estonia, 2011: 131-136.
[18] 岳小龙, 卓放. 基于叠加法和正弦幅度调制的阻抗测量注入扰动电流信号形式[J]. 电源学报, 2014, 12(3): 8-13, 32. Yue Xiaolong, Zhuo Fang. Injected current perturbation signal form for impedance measurement based on superposition method and sinusoidal amplitude modulation[J]. Journal of Power Supply, 2014, 12(3): 8-13, 32.
[19] Martin D, Santi E, Barkley A. Wide bandwidth system identification of AC system impedances by applying pertubations to an existing converter[C]//2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 2011: 2549-2556.
[20] Roinila T, Vilkko M, Sun Jian. Broadband methods for online grid impedance measurement[C]//2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 2013: 3003-3010.
[21] Roinila T, Vilkko M, Sun Jian. Online grid impedance measurement using discrete-interval binary sequence injection[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(4): 985-993.
[22] Roinila T, Messo T. Online grid-impedance measurementusing ternary-sequence injection[J]. IEEE Transactions on Industry Applications, 2018, 54(5): 5097-5103.
[23] 潘鹏宇, 宋依桐, 何正友. 可控测量频带的牵引供电系统频域阻抗测量方法[J]. 中国电机工程学报, 2019, 39(18): 5399-5405. Pan Pengyu, Song Yitong, He Zhengyou. Impedance measurement for traction power system at the controlled frequency band[J]. Proceedings of the CSEE, 2019, 39(18): 5399-5405.
[24] Pan Pengyu, Hu Haitao, He Zhengyou, et al. Rapid impedance measurement approach based on wideband excitation for single-phase four-quadrant converter of high-speed train[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-11.
[25] Wu Mingli, Li Jing, Liu Qiujiang, et al. Measurement of impedance-frequency property of traction network using cascaded H-bridge converters: device design and on-site test[J]. IEEE Transactions on Energy Conversion, 2020, 35(2): 746-756.
[26] Pan Pengyu, Hu Haitao, Xiao Donghua, et al. An improved controlled-frequency-band impedance measurement scheme for railway traction power system[J]. IEEE Transactions on Industrial Electronics, 2021, 68(3): 2184-2195.
[27] Jaksic M, Shen Zhiyu, Cvetkovic I, et al. Wide-bandwidth Identification of small-signal dq impedances of ac power systems via single-phase series voltage injection[C]//2015 17th European Conference on Power Electronics and Applications (EPE'15 ECCE-Europe), Geneva, Switzerland, 2015: 1-10.
[28] 宋文胜, 蒋蔚, 刘碧, 等. 单相级联H桥整流器简化模型预测电流控制[J]. 中国电机工程学报, 2019, 39(4): 1127-1138. Song Wensheng, Jiang Wei, Liu Bi, et al. Single-phase cascaded H-bridge rectifiers simplified model predictive current control[J]. Proceedings of the CSEE, 2019, 39(4): 1127-1138.
[29] 李冬辉, 孔祥洁, 刘玲玲. 单相双Buck逆变器的无差拍快速重复控制[J]. 电网技术, 2019, 43(10): 3671-3677. Li Donghui, Kong Xiangjie, Liu Lingling. Deadbeat and fast repetitive control for single-phase dual-Buck inverter[J]. Power System Technology, 2019, 43(10): 3671-3677.
[30] 毛惠丰, 孔德鹏, 陈增禄, 等. 一种单相H桥电压型逆变器三电平滞环电流跟踪控制方法[J]. 中国电机工程学报, 2015, 35(15): 3904-3911. Mao Huifeng, Kong Depeng, Chen Zenglu, et al. A new three-level hysteresis current controlled single-phase H-bridge voltage source inverters[J]. Proceedings of the CSEE, 2015, 35(15): 3904-3911.
[31] 姚楠. 电气化铁道牵引网基波与谐波模型研究[D]. 北京: 北京交通大学, 2008. Yao Nan. A study of fundamental and harmonic frequency modeling for traction network of electric railways[D]. Beijing: Beijing Jiaotong University, 2008.
Abstract With the increasing mileage of electrified railways and the number of new electric locomotives, the power electronics characteristics of traction power supply system in China become more and more obvious, which can easily cause wide-band oscillation phenomenon. A lot of research shows that this phenomenon is caused by the input/output characteristics mismatch of electric locomotive and traction power supply system, and this mismatch can be regarded as the impedance characteristics mismatch of “vehicle-network”. Therefore, accurately obtaining the impedance characteristics of traction power supply system is of great significance for revealing the mechanism of wide-band oscillation in electrified railway and improving the reliability of railway power supply. However, the impedance mathematical modeling method relies on the derivation of mathematical formulas, which requires to know the detailed parameters inside the system, and the traction power supply system has complex structure, numerous components, dynamic topology changes, and the actual impedance of components may deviate from the production design parameters. The impedance characteristics obtained by impedance measurement are closer to reality. Therefore, this paper focuses on the research of controllable wide-band impedance measurement technique for traction power supply system, and the main research contents are as follows:
A controllable wide-band impedance measurement device embedded with energy storage unit is proposed, which mainly includes: boost transformer, cascaded H-bridge, bidirectional DC-DC converter, super capacitor. Among them, bidirectional DC-DC converter and super capacitor form energy storage unit together, which provides stable DC voltage for cascaded H-bridge to generate wide-frequency harmonic current. Its power level can be flexibly expanded by increasing the number of modules.
A multilevel hysteresis current control method is proposed, which uses the characteristic that the output voltage level of each port changes with the direction of output current, combined with the calculated minimum number of modules and the current trend of error current, dynamically adjusts the output voltage of each module, limits the error current within the target range, so that the output harmonic current is as close as possible to the reference current, and improves the harmonic current output effect. Based on Matlab/Simulink, the control method is simulated and verified. Several current disturbance waveforms and Fourier analysis results with representative frequency bands are given. The simulation results show that this control method can generate wide-frequency harmonic current in the range of 10 Hz~5 kHz.
A hardware-in-the-loop experimental platform is built to further verify the controllable wide-band impedance measurement device embedded with energy storage unit and multilevel hysteresis current control method. The experimental results show that the proposed method can quickly obtain the wide-band impedance characteristics of traction power supply system. The measurement range is 10 Hz~5 kHz, which greatly improves the measurement efficiency and can adapt to the measurement demand of time-varying impedance. Through the above analysis, we can draw the following conclusions: (1) The proposed device topology does not contain resistance, has low energy loss, does not need to worry about serious heating due to resistance during measurement process, and has modular structure, convenient expansion and flexible application. (2) The multilevel hysteresis current control method can inject harmonic current with controllable frequency band and amplitude into traction power supply system at one time, which can adapt to the measurement demand of time-varying impedance. (3) Compared with traditional hysteresis current control method, under the same tracking accuracy condition, this method greatly reduces switching times of power devices, avoids dead zone effect at same time, and has good application potential.
keywords:Traction power supply system, technology of impedance measurement, multilevel hysteresis current control, harmonic disturbance
DOI: 10.19595/j.cnki.1000-6753.tces.230178
中图分类号:TM922.3
国家自然科学基金项目(52107125)和四川省自然科学基金重大项目(2022NSFSC0001)资助。
收稿日期 2023-02-16
改稿日期 2023-04-27
陈司懿 男,1998年生,硕士研究生,研究方向为牵引供电系统宽频带阻抗测量。E-mail:csyswjtu@163.com
胡海涛 男,1987年生,教授,博士生导师,研究方向为牵引供电/电力系统电能质量与稳定性。E-mail:huhaitao16@163.com(通信作者)
(编辑 赫 蕾)