图1 EAST快控电源支路结构
Fig.1 EAST fast control power supply branch structure
摘要 全超导托卡马克核聚变发电装置(EAST)快控电源负载电感的电流受多种不确定环境因素的影响而难以预测,灰色预测无需精确对象模型,只需少量已知信息即可实现输出电流短期预测,已在EAST快控电源中有了一定研究应用。为解决灰色预测在EAST快控电源中对突变信号边沿预测精度低和预测延时时间长的问题,提出一种改进灰色预测算法实现输出电流预测。在一个开关周期内对输出电流进行等时长间隔采样4次作为原始序列,将滚动式采样预测改为逐周期采样预测,在实现灰色预测的过程中不必依赖过去几个周期的历史采样信息,只需本周期的4个原始采样值即可实现输出电流的预测。根据预测电流与参考电流误差自适应调整单神经元比例-积分(PI)控制的输出增益,实现输出电流的快速准确控制。仿真和实验结果表明,在EAST快控电源电流预测过程中所提出的改进灰色预测,对比传统灰色预测具有更高的预测精度和更小的预测延时,改进灰色预测变增益单神经元PI控制能够在减小电流超调的同时加快输出电流响应速度。
关键词:EAST快控电源 改进灰色预测 逐周期采样预测 变增益单神经元PI
由中国科学院自主研发的全超导托卡马克核聚变发电装置(Experimental Advanced Superconducting Tokamak, EAST)是国家能源发展重点研发项目,其中快控电源主要实现等离子体垂直位移控制的功能,总控制室根据等离子体位置发出参考电压信号,快控电源根据参考电压信号产生对应的跟踪电流信号,进而对电感负载进行励磁,实现等离子体垂直位置的控制。跟踪参考电流信号快速输出电流以建立励磁磁场是EAST快控电源最重要的性能,而现阶段固定参数PI控制以及数字控制的固有延时使得输出电流在快速建立和精确跟踪之间难以平衡。
目前EAST快控电源的控制方式是简单的对给定信号进行跟踪和放大,而对输出电流实现精准预测和控制可提升目标磁场建立的速率和精度,进而降低对电源容量持续增长的要求。EAST快控电源线圈负载上的电压平衡方程十分复杂,负载线圈上的电流与线圈的自感、匝间互感以及等离子体电流和线圈产生的互感相关。因此对电源输出电流进行预测不能简单地通过电源输出电压和线圈的自身参数来建模完成,故标准模型预测、无差拍预测等方法预测输出电流的可行性较低,但可通过电源输出电流值进行轨迹预测,并以此为基础进行优化控制来提升目标磁场建立的速率和精度,从而有效提升等离子体控制效果。灰色预测无需建立精确的对象模型,能够根据少量的已知信息对未来时刻的信息进行短时预测,以克服大滞后系统带来的跟踪延时问题,在许多工程实际场合灰色预测均得到应用。文献[1]利用灰色预测进行转子电流信息的超前预测,解决了非理想情况下的双馈感应电机难以并网的问题。文献[2]利用灰色预测对不同环境下的目标输出值进行预测,实现了良好的超前预测控制。文献[3]提出了一种涉及原始数据检验的滚动灰色预测方法,分场景有效预测了全球的氢负荷。为了改善永磁同步电机双闭环控制的性能,文献[4-5]提出了一种灰色预测优化模型预测的电流转速双闭环控制策略,实现电流的超前控制。文献[6]为了改善交流电源的控制性能,提出了一种灰色预测结合滑模控制的控制策略,利用灰色预测对滑模边界参数进行预测,加快滑模结构的收敛速度,实现了高精度的快速稳定跟踪性能。为了改善温度预测的准确性,文献[7]提出了一种改进灰色预测模型,实现准确的温度预测。文献[8]利用新陈代谢灰色预测结合粒子滤波算法实现电池剩余寿命的预测。文献[9]将灰色预测和卡尔曼滤波结合来实现锂电池的荷电状态估计。文献[10]将分数阶灰色退化模型与无迹粒子滤波结合实现电池剩余寿命预测。文献[11]利用二阶白化灰色预测方程对IGBT的寿命进行长期预测。如上所述关于灰色预测的应用和研究均能实现准确预测,但是需要大量的滚动采样历史值信息才能实现预测,当EAST快控电源中参考信号为非指数趋势的突变信号时,在大量采集初始序列值的过程中需要消耗几个周期的采样时间,不能实现电流的预测,因此存在一定的预测延时,且存在突变的非上凹指数型原始序列给灰色预测带来较大误差。文献[12]挖掘输入和输出量之间的关联,提出了一种新的灰色预测算法,进一步提升了预测精度。文献[13]结合模糊理论构建了灰色预测模型,并给出了获得智能灰度预测模型的求解步骤,使得灰色预测精度得到提高。文献[14]引入一种可实现带通滤波功能的平滑性算子,提出了一种基于平滑序列的灰色预测算法,有效提高了预测精度并减少计算时长。以上灰色预测的改进能够提高预测精度,但是均需要大量的数值计算和矩阵等效变换才能实现灰色预测精度的提高,由于EAST快控电源输出电流的动态响应要求高,难以在较短的运算周期中实现电流准确跟踪。
灰色预测结合PI控制也在许多场合得到应用,但是经过灰色预测后再进行PI控制需要依赖相应的工程经验,因此自适应PI控制得以应用。文献[15-16]将灰色预测与自适应模糊PI控制相结合,实现了大滞后系统的快速控制。模糊自适应PI控制需要依赖大量的工程经验和初始数据以实现良好的控制性能,在EAST快控电源的数字化实现中存在困难。文献[17]提出一种结合前馈的PI控制方法。文献[18]提出一种内模PID控制方法。文献[19]提出一种结合弹性系数改善PI参数的控制方法,均能够实现PI参数的优化控制,但是在EAST快控电源中应用较为复杂。单神经元结构的PI控制实现过程简单,文献[20]提出了一种变输出增益单神经元PID自适应控制方法,实现了输出控制量的自适应控制,有效地提高了转速角的跟踪精度。文献[21]提出了一种单神经元PID自适应控制器,利用改进型细菌觅食优化算法优化控制器参数,实现惯性稳定平台自适应控制。文献[22]提出了一种基于改进灰色预测单神经元PID控制算法,利用序列-残差联合灰色预测模型对位置信号实现精准预测,同时结合模糊控制实现单神经元输出增益的在线自适应整定,达到良好的控制效果。现有文献关于灰色预测结合单神经元PI控制的性能良好,但即使进行灰色预测算法改进均需要依赖大量的原始数据且计算过程复杂,在单神经元PI控制中仍存在输出增益固定的问题,导致PI参数整定效果不佳。
为了实现EAST快控电源滞后系统的快速跟踪控制,本文提出了一种改进灰色预测结合变增益单神经元PI控制策略,以实现输出电流的快速控制。在传统滚动式灰色预测结构上进一步提高电流采样频率,建立逐周期预测模型,只需一个开关周期的等时长间隔连续4次采样无需历史采样信息即可实现输出电流的逐周期预测,减小了灰色预测延时的同时提升了预测精度。根据预测电流与参考值之间的误差改变单神经元输出增益,实现PI参数的自适应调节,进一步提升了输出电流跟踪响应速度。仿真和实验验证了提出的改进灰色预测模型具有良好的预测精度,变增益单神经元PI控制结构在输出电流控制中具有更快的动态响应速度。
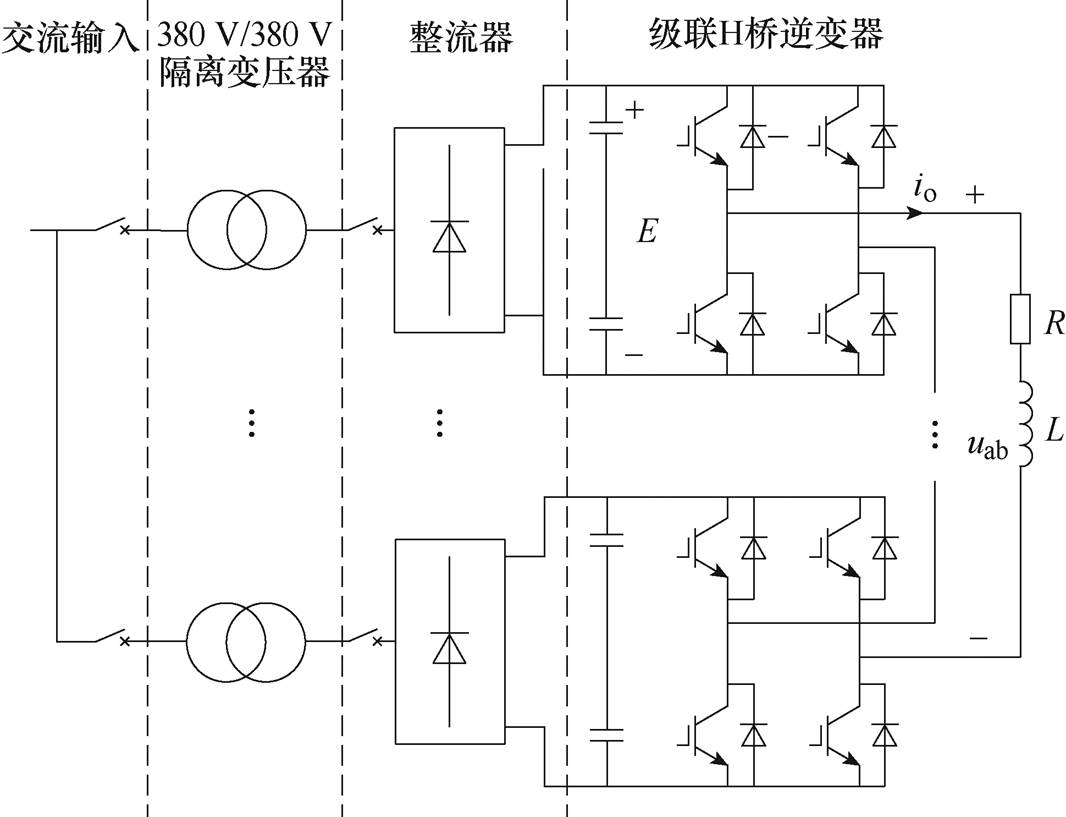
EAST快控电源主电路采用单相H桥逆变电路级联成单支路的模式,电路结构如图1所示。图1中,uab为级联H桥逆变输出端电压,io为支路输出电流,L为内部真空室负载电感,R为负载电感和线路电阻总和,E为单H逆变桥直流侧电压。
图1 EAST快控电源支路结构
Fig.1 EAST fast control power supply branch structure
根据参考信号快速输出电流是EAST快控电源首要的性能指标,甚至可以允许较小的超调以保证输出电流的动态响应速度。现阶段的工程实际中,EAST快控电路采用单电流环PI控制,支路控制结构框图如图2所示。
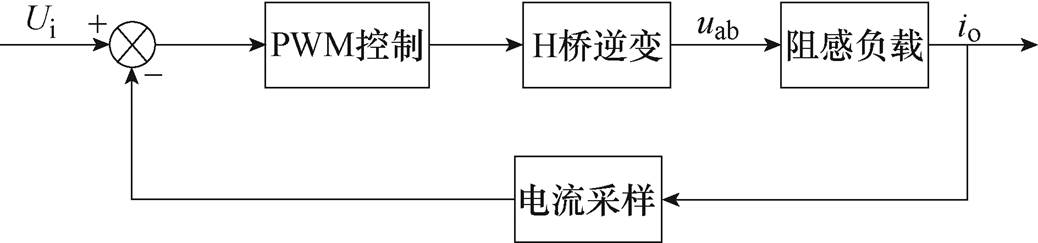
图2 支路控制结构框图
Fig.2 Block diagram of branch control structure
图2中,Ui为给定参考信号,对应的线性关系为Ui输入±10 V时,支路输出io=±1 500 A。Ui与电流采样信号经过误差放大和PI控制后产生PWM驱动信号驱动H桥逆变电路,控制电感负载端产生相应的电流,实现闭环反馈控制。
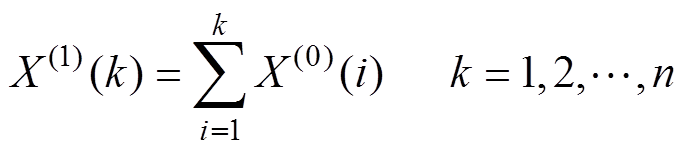
灰色预测GM(1,1)模型将无规律的已知原始序列信息进行累加,得到指数规律的生成序列后,经过预测计算得到原始数列的预测值。假设经过采样得到的原始电流序列为
 (1)
(1)
对原始采样电流进行累加操作,得到累加序列
 (2)
(2)
经过紧邻均值操作后,生成紧邻均值为
 (3)
(3)
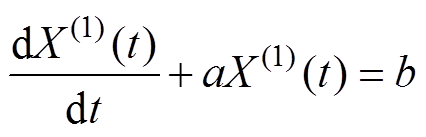
因此可得GM(1,1)的灰色微分方程为
 (4)
(4)
可得相应的白化方程为
 (5)
(5)
式中,a为发展系数;b为灰色作用量。a和b可用最小二乘法表示为
 (6)
(6)
其中
 (7)
(7)
 (8)
(8)
可得到方程式(5)的解为
 (9)
(9)
相应地,式(4)时间响应方程为
 (10)
(10)
对式(10)的序列进行累减生成操作后可得原始序列的估计值为
 (11)
(11)
文献[23]利用灰色预测对EAST快控电源的参考电流轨迹和输出电流进行超前预测,实现了电流信号的轨迹预测。文献[24]提出了一种轴对称变换的方法将输出电流的采样值上凸序列参数转变为上凹序列,进一步还原初始值后实现对输出电流的精准预测。以上应用于EAST快控电源中传统的灰色预测为滚动式预测,虽然大量的原始序列有利于提高预测精度,但只要4个原始序列也能满足输出电流的精确预测需求,EAST快控电源为ms级响应电源,不适宜利用大量的原始采样数据进行预测。在只需4个原始序列的基础上,传统滚动式灰色预测在EAST快控电源中已有一定的应用基础,而进一步提高输出电流预测精度将有利于加快输出电流响应速度,传统灰色预测趋势如图3所示。传统的滚动式灰色预测存在以下缺点:
(1)至少需要4个原始序列点组成X(0)序列,才能进行第5个点的预测,因此在前4个开关周期内无法实现输出电流的预测,无法提升输出电流的动态响应性能。
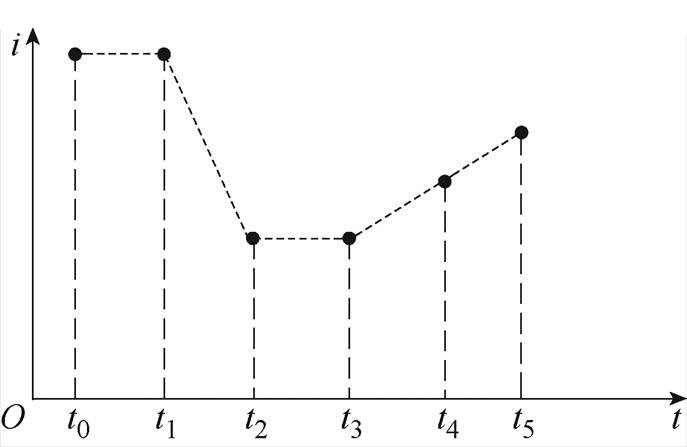
图3 灰色预测趋势
Fig.3 Grey prediction trend chart
(2)当参考电流信号为阶跃信号时,在阶跃信号的突变沿周围,连续采样的4个点t0~t3可能分别属于正负幅值点处。由于采样原始序列存在不为指数趋势的突变序列,这将使得预测t4时刻电流值存在较大误差。
(3)在预测t4时刻值时需要已知t0~t3时刻值,预测t5时刻值时需要t1~t4时刻值,在程序滚动前进过程中需要一直保留前4个周期的采样值才能实现灰色预测,给处理器带来一定的负担。
为了解决上述问题,提出一种改进逐周期预测式灰色预测方法应用于EAST快控电源输出电流控制中,改进逐周期预测式灰色预测趋势如图4所示。在收集初始值序列和预测的过程中不再滚动式进行,不用保留历史采样数据,在t1~t2一个开关周期内采样4次,即在一个开关周期内采样t1、k1、k2、k3 4个点作为原始序列实现t2时刻的电流预测。在进行t3时刻的电流预测时,无需保留t1、k1、k2、k3 4个点的数值,只需再次采样4次即可实现电流预测。在一个开关周期内需要采样4次,同时也需要完成灰色预测的计算和单神经元PI控制量的计算,将一个开关周期时间分为计算时间tc和采样时间ts。为了避免重复采样使得原始序列值重复,采用等时长间隔采样4次的方式,既能减小原始序列中带有非指数规律的数值的影响,也能保证留有足够时间来完成计算。在等距离时长间隔采样中,间隔的时长最大值可表示为ts/4。
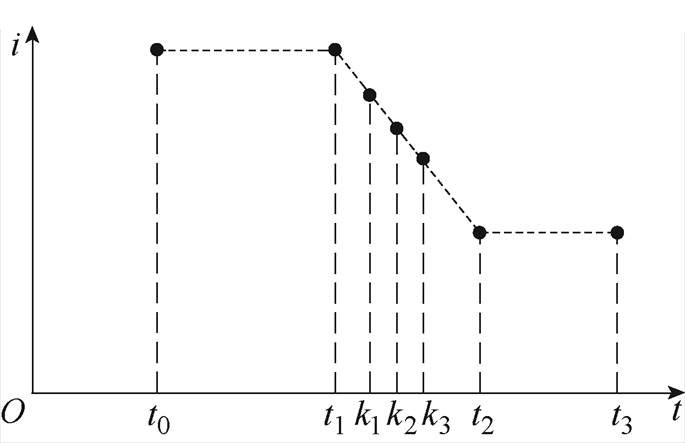
图4 改进灰色预测趋势
Fig.4 Improved grey prediction trend chart
提出的改进逐周期预测式灰色预测方法对比传统的滚动式灰色预测具有以下优点:
(1)不依赖前几个周期的历史采样信息即可实现逐周期的电流预测,不需要保留历史采样信息也给处理器减小了相应的存储空间。
(2)大大缩短了预测延时,只需要牺牲一个开关周期的延时,即可实现输出电流的预测。
(3)在一个开关周期中等时长间隔采样4次组成原始数据序列,避免了原始序列中带有非指数规律的数值,进一步提升了灰色预测的精度,特别是在信号突变处精度提升较明显。
单神经元PI控制结合了传统PI控制的优点,计算过程简单,同时PI控制参数具有自适应调节能力。但是传统的单神经元输出增益固定,调节参数能力有限,因此提出一种变增益单神经元PI控制方法,控制结构如图5所示。
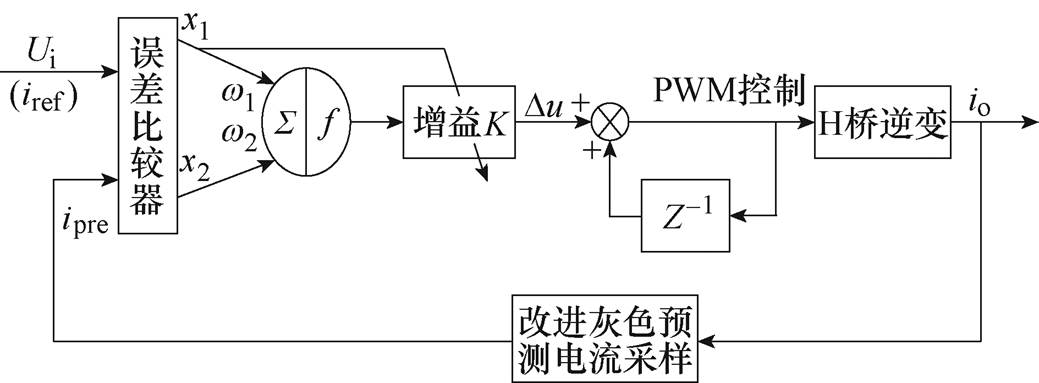
图5 变增益单神经元PI控制结构
Fig.5 Variable gain single neuron PI control chart
图5中,x1和x2为单神经元输入量,w1和w2为加权系数,K为单神经元输出增益系数,Du为控制量增量,ipre为灰色预测产生的采样电流,iref为参考电流。取x1=De(k),x2=e(k),分别表示预测电流误差增量及预测电流误差量。
对比传统增量式PI控制,比例系数Kp和积分系数Ki分别表示为
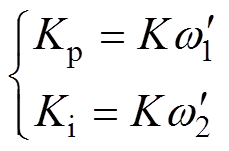 (12)
(12)
其中
 (13)
(13)
单神经元PI输出控制量为
 (14)
(14)
式中,u(k-1)为k-1时刻单神经元PI输出的控制量。
为了使k+1时刻电流能够快速跟踪参考电流,设计目标函数为
 (15)
(15)
为了加快跟踪速度,令权值系数w1和w2朝目标函数的负梯度方向搜索,因此有权值系数变化式为
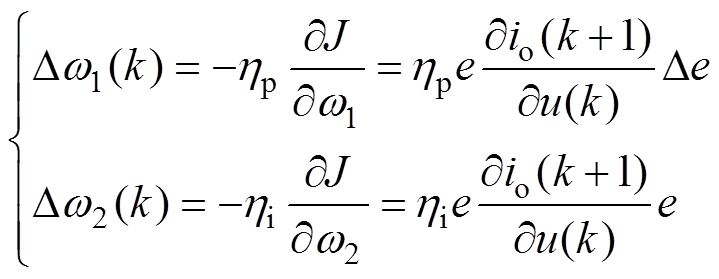 (16)
(16)
式中,io(k+1)为k+1时刻输出电流。
现有资料文献中,常用符号函数sign(io(k+1))代替未知的∂io(k+1)/∂u(k),为了进一步优化Kp和Ki的系数,可求解∂io(k+1)/∂u(k)近似值。
根据图1可列写回路方程为
 (17)
(17)
EAST快控电源负载为超导线圈负载,忽略电感内阻情况下,离散化式(17)可得
 (18)
(18)
式中,Ts为开关周期。
单神经元PI输出值u(k)与载波计数值进行比较产生占空比,当单H桥输出电压为E时,占空比达到最大值,因此可得u(k)与uab(k)的关系为
 (19)
(19)
式中,M为数字控制中载波计数幅值。
联立式(18)和式(19)可得∂io(k+1)/∂u(k)估计值为
 (20)
(20)
单神经元PI控制中w1和w2及其增量由跟踪电流误差大小自适应调整得出,而输出增益K固定,将会导致调试过程繁琐,特别是对阶跃参考信号跟踪时,发生电流指令突变使得控制系统适应性差。因此为了进一步提高控制系统的自适应性,提出一种根据输入、输出误差实时自适应非线性调节输出增益K值的方法,K值自适应调整公式为
 (21)
(21)
式中,Ka和Kb为K的上、下限;Ae和Be为误差e(k)上、下限。
定义改进灰色预测的每一步输出电流与实际输出电流误差值为某一有界量,bp为某一具体正值,得
 (22)
(22)
同时预测电流的误差e(k)与实际电流误差er(k)也收敛于bp,即
 (23)
(23)
结合图1和式(17),在EAST快控电源负载线圈为超导线圈情况下,可以建立系统状态方程为
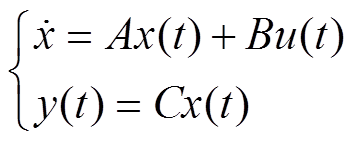 (24)
(24)
式中,x(t)为状态量;u(t)为控制输入量;y(t)为输出量;A、B和C均为方程系数。
将式(24)转化为时域形式,则有
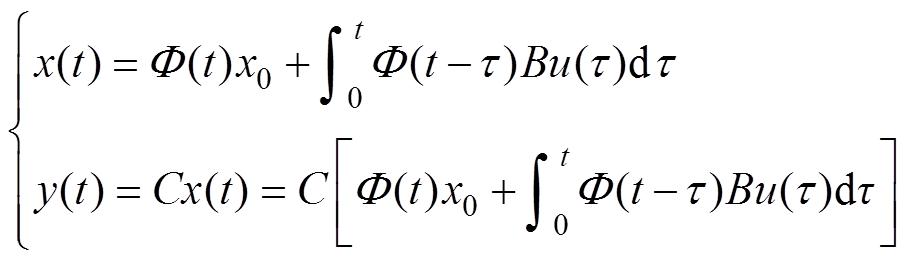 (25)
(25)
式中,x0为初始状态量; 为状态量时间函数;
为状态量时间函数; 为时间相关变量。
为时间相关变量。
因此可得实际输出电流与参考电流之间误差在时域中的表达式为
 (26)
(26)
假设初始时刻x0和预测误差e(0)均为0,经过变增益单神经元PI控制后,结合式(14),可得

 (27)
(27)
其中

展开误差积分项,有
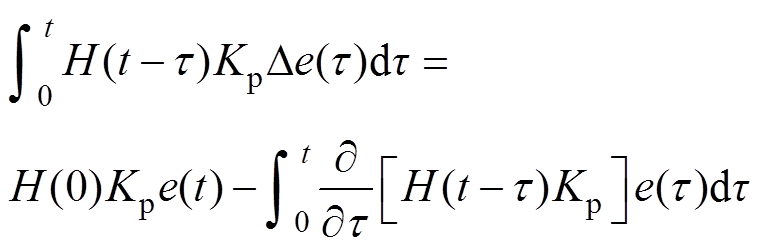 (28)
(28)
将式(28)代入式(27)可得
 (29)
(29)
重新整理式(27)且在有限时间内取范数可得
 (30)
(30)
在无限时间内,令
 (31)
(31)
将式(30)两端同时乘 ,在有限大时间l 内可得
,在有限大时间l 内可得
 (32)
(32)
为了进一步简化式(32),令
 (33)
(33)
因此,联立式(32)和式(33)可得实际输出电流跟踪误差的表达式为
 (34)
(34)
当灰色预测模型预测输出电流时,预测电流与实际电流为一有界量,则有r1(t)<1,实际输出电流与参考电流值收敛于一有界值,收敛的值与bp有关。
根据以上分析可知,传统灰色预测将会在有限时间内实现收敛,收敛的值与bp有关。但是传统灰色预测存在一定预测误差,特别在阶跃突变信号的周期初始处预测较大,因此可能需要较长时间才能实现收敛,且收敛值不能接近于0。特殊情况下,传统灰色预测不及时,整个预测过程不会收敛,将出现预测严重失控的情况。
当所提出的改进灰色预测模型能够准确预测输出电流,且在阶跃信号突变边沿处预测误差较小时,bp可忽略,因此存在 ,实际输出电流与参考电流的误差在有限大时间内收敛于0。
,实际输出电流与参考电流的误差在有限大时间内收敛于0。
为了验证所提的改进灰色预测变增益单神经元PI控制方法的可行性,在Matlab仿真软件中搭建2H桥级联模型,级联H桥输出侧电压范围为±200 V,负载电感为2 mH,开关频率为5 kHz,额定参考电流为±10 A。利用文献[23-24]涉及的传统灰色预测模型和提出的改进灰色预测模型对输出电流进行预测,输出电流预测波形如图6和图7所示。
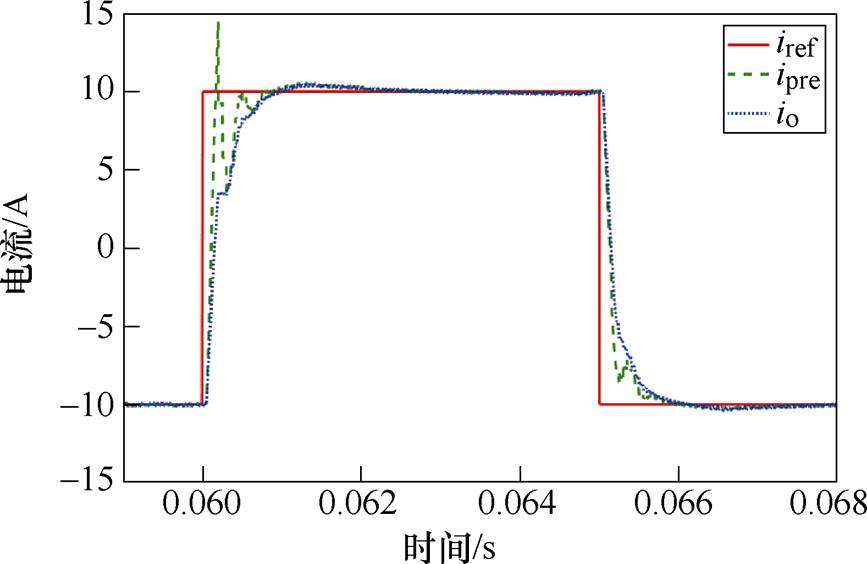
图6 传统灰色预测下输出电流预测波形
Fig.6 Output current prediction waveforms under traditional grey prediction
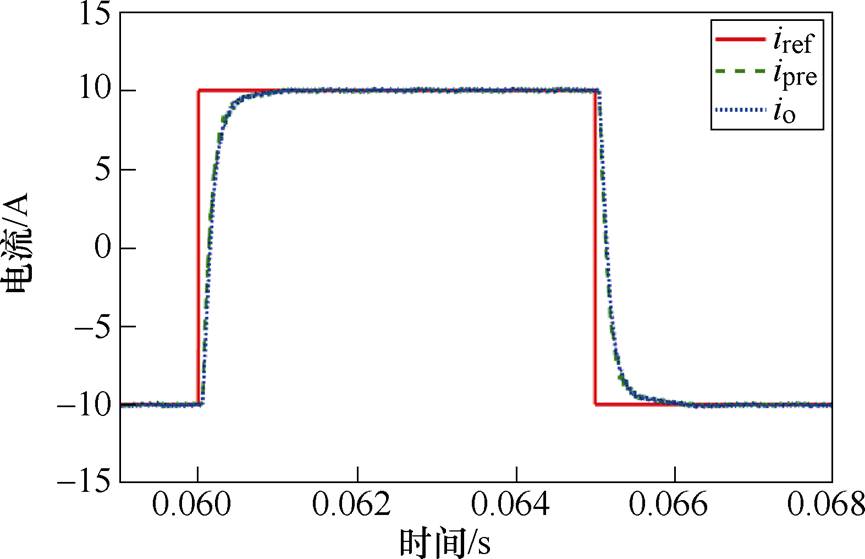
图7 改进灰色预测下输出电流预测波形
Fig.7 Output current prediction waveforms under improved grey prediction
对比图6和图7可知,两种灰色预测输出电流ipre均能跟随输出电流io的趋势,实现输出电流预测。但是传统灰色预测在参考阶跃信号iref上升阶段,采样序列值为上凸序列,不符合传统灰色预测的上凹规律序列原始值,因此预测电流ipre存在一定的预测误差。改进灰色预测在一个开关周期内连续采样4次,避免了不同采样周期原始序列值存在突变的过程,因此具有更高的预测精度。
改进灰色预测结合变增益单神经元PI控制与传统PI控制下输出电流对比波形如图8所示。PI控制下的输出电流io1和改进灰色预测结合变增益单神经元PI控制下的输出电流io2均能够实现参考电流的快速跟踪,但是在参考电流上升初期,改进灰色预测能够提前预测输出电流,使得输出电流预测速度更快,接近目标值附近,所提的控制策略实现了PI参数的整定,进一步减小了超调。改进灰色预测结合变增益单神经元PI的EAST输出电流控制对比传统PI控制具有更快的动态响应速度和更小的超调。
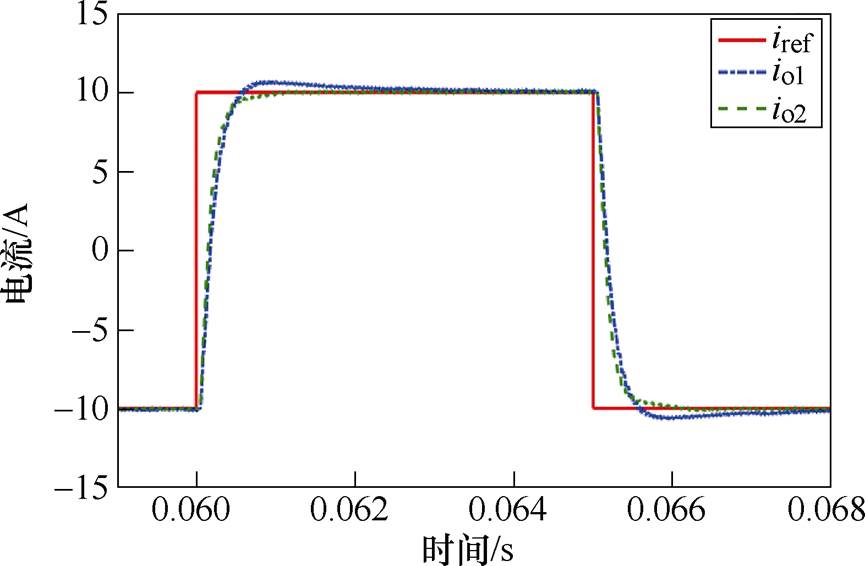
图8 输出电流对比波形
Fig.8 Output current comparison waveforms
进一步对提出的控制方法进行验证,搭建了2H桥级联的实验样机,实验样机如图9所示。其中级联H桥输出电压为±200 V,负载电感为2 mH,IGBT开关管型号为2MBI75N-060,电流传感器为1 000 1的LA55-P/SP50电流传感器,采用的数字处理器为TMS320F28335,指令电压Ui=±4 V,输出额定电流io=±8 A。
1的LA55-P/SP50电流传感器,采用的数字处理器为TMS320F28335,指令电压Ui=±4 V,输出额定电流io=±8 A。
传统灰色预测与提出的改进灰色预测对输出电流的预测对比如图10和图11所示。与仿真类似,传统灰色预测在参考阶跃信号上升突变过程中,存在一定的预测误差。改进灰色预测在预测输出电流过程中具有更高的预测精度,同时所经历的预测延时只需要70 ms,比传统的灰色预测所需的90 ms时间更短。对比传统灰色预测和改进灰色预测上升调节时间ts和下降调节时间td,可知改进灰色预测上升调节时间和下降调节时间均更短,预测的电流值能够更快收敛到目标电流值。
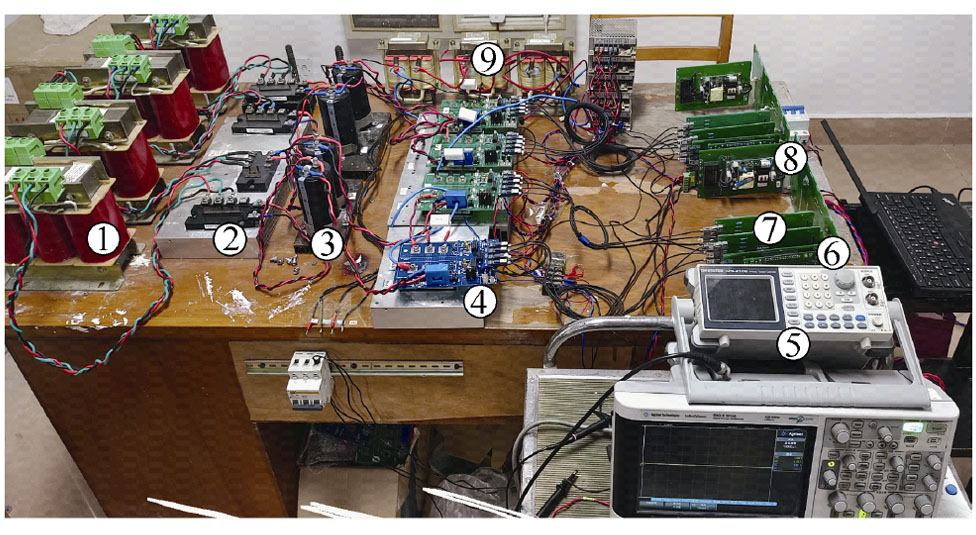
图9 实验样机
① —三相隔离变压器 ②—整流桥 ③—滤波电容 ④—IGBT及驱动板 ⑤—参考源 ⑥—DSP控制板 ⑦—光纤通信板 ⑧—辅助电源板 ⑨—负载电感
Fig.9 Experimental prototype
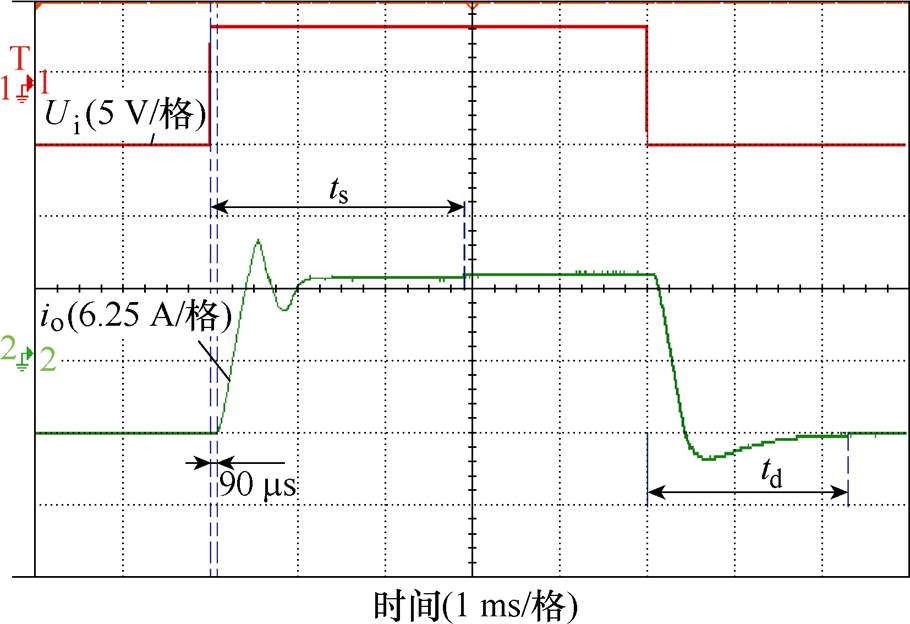
图10 传统灰色预测预测输出电流波形
Fig.10 Output current waveforms of traditional grey prediction
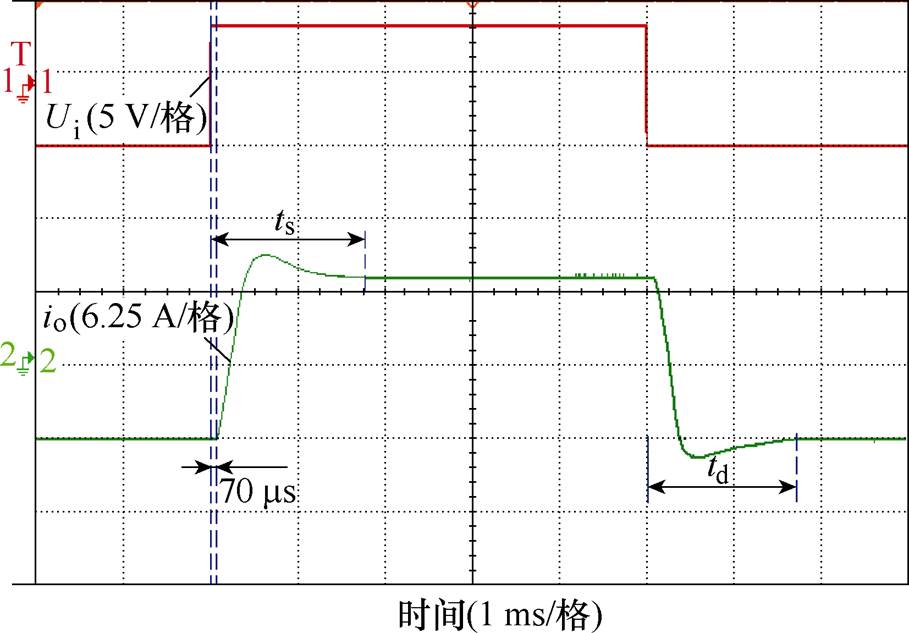
图11 改进灰色预测预测输出电流波形
Fig.11 Output current waveform of improved grey prediction
传统PI控制下,输出电流及级联H桥输出端电压波形uab如图12所示,输出电流能够跟踪参考指令Ui,快速产生输出电流。传统PI控制下输出电流动态上升和下降过程波形如图13和图14所示。为了实现电流快速跟踪,在输出电流上升和下降过程中,均存在约2.5 A的超调,且上升和下降过程中均存在110 ms的跟踪控制延时,到达目标值的90 %左右时,均需要410 ms,上升过程中达到稳态值需2.16 ms,下降过程中达到稳态值需2.1 ms。
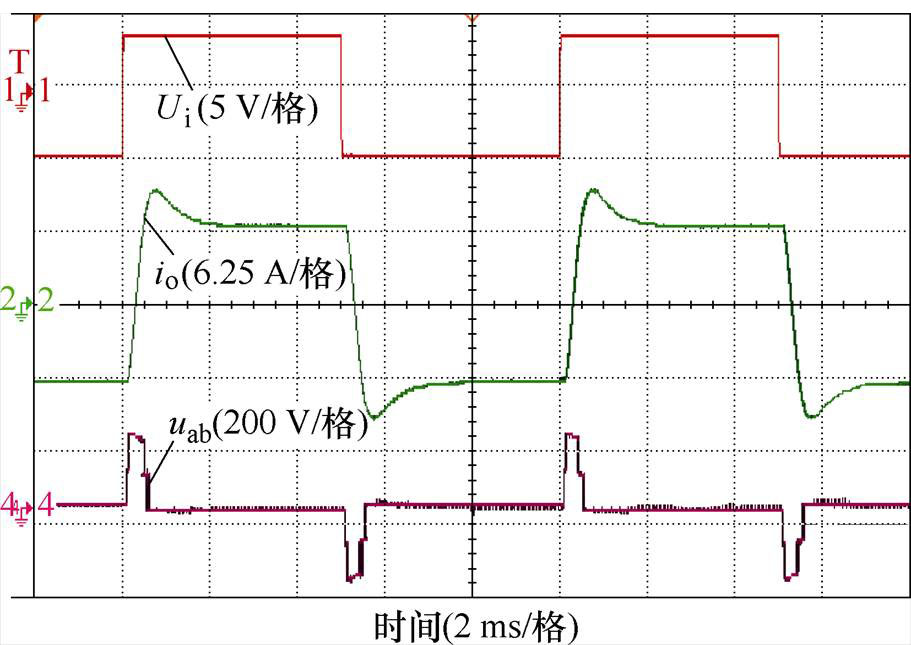
图12 PI控制下输出端波形
Fig.12 Output waveforms under PI control
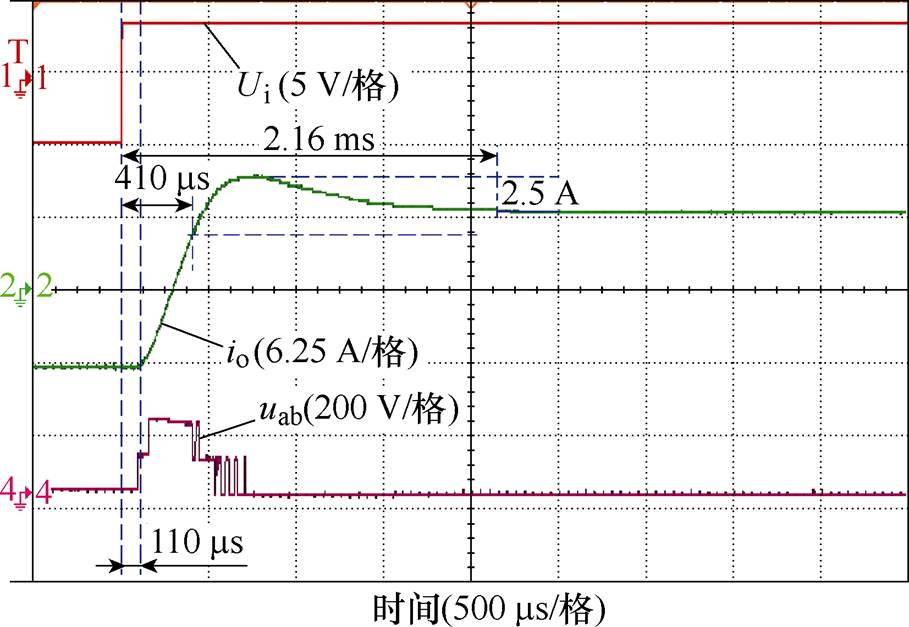
图13 PI控制下输出电流上升波形
Fig.13 Output current rise waveforms under PI control
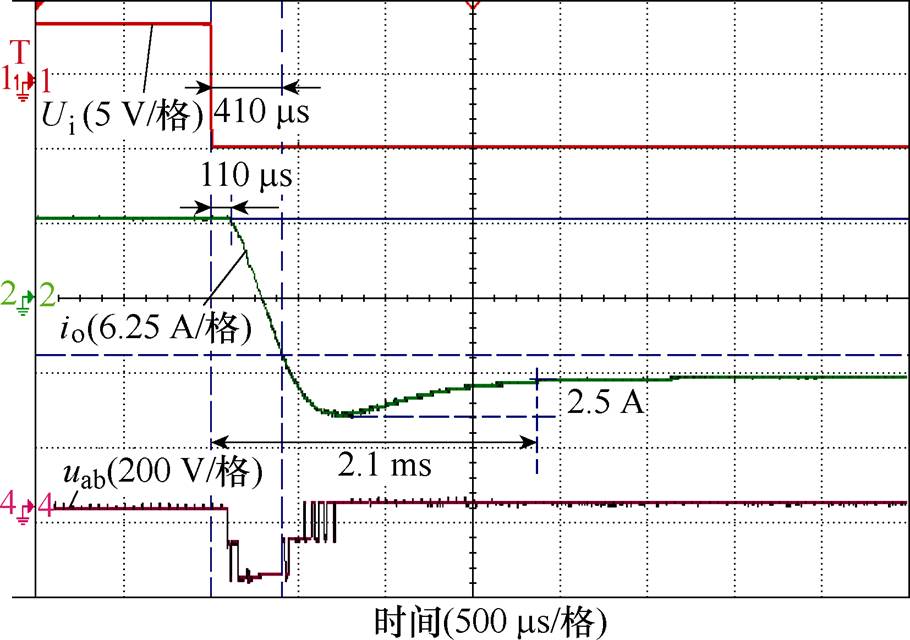
图14 PI控制下输出电流下降波形
Fig.14 Output current drop waveforms under PI control
在所提出的改进灰色预测变增益单神经元PI控制下,输出电流及级联H桥输出端电压波形uab如图15所示。所提控制策略下输出电流动态上升和下降过程波形如图16和图17所示。所提控制策略能够快速跟随参考电压信号快速输出电流,在输出电流上升和下降过程中,均存在约2 A的超调,且上升和下降过程中存在70 ms和60 ms的跟踪控制延时,到达目标值的90 %左右时,需要370 ms和400 ms,上升过程中达到稳态值需1.82 ms,下降过程中达到稳态值需1.81 ms。
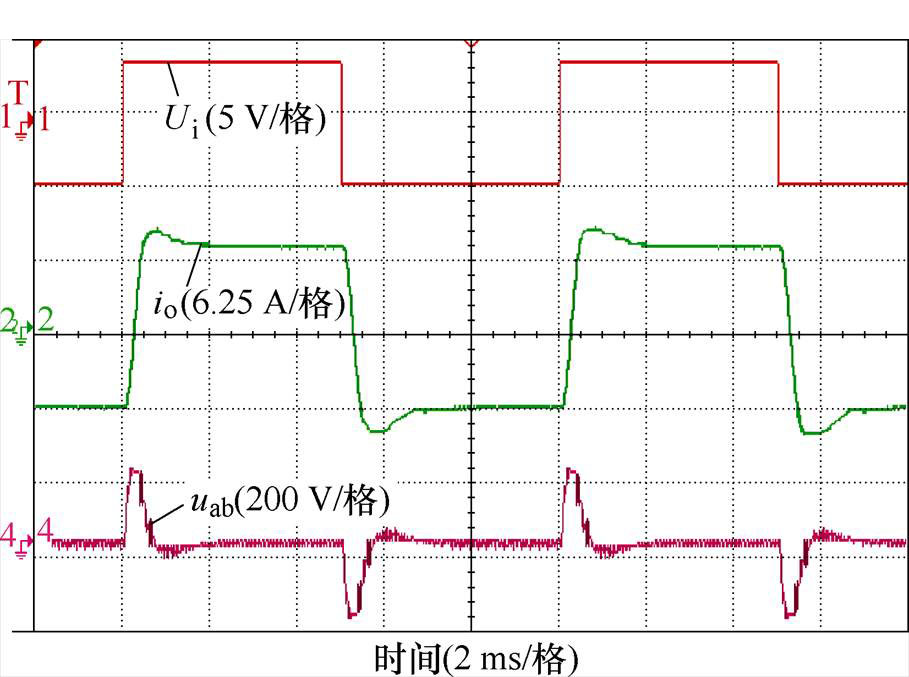
图15 所提控制策略下输出端波形
Fig.15 Output waveforms under the proposed control strategy
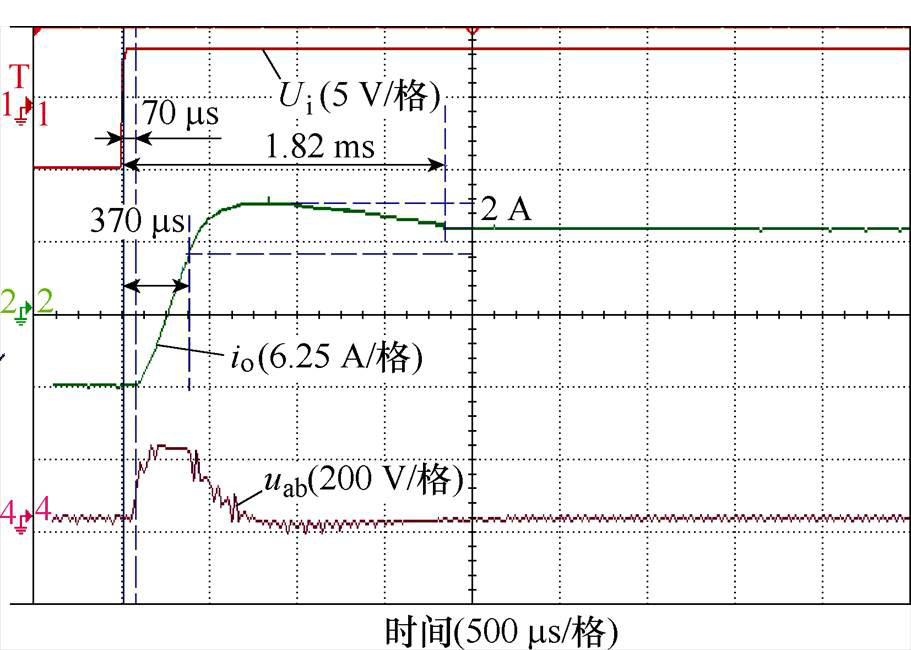
图16 所提控制策略下输出电流上升波形
Fig.16 Output current rise waveforms under the proposed control strategy
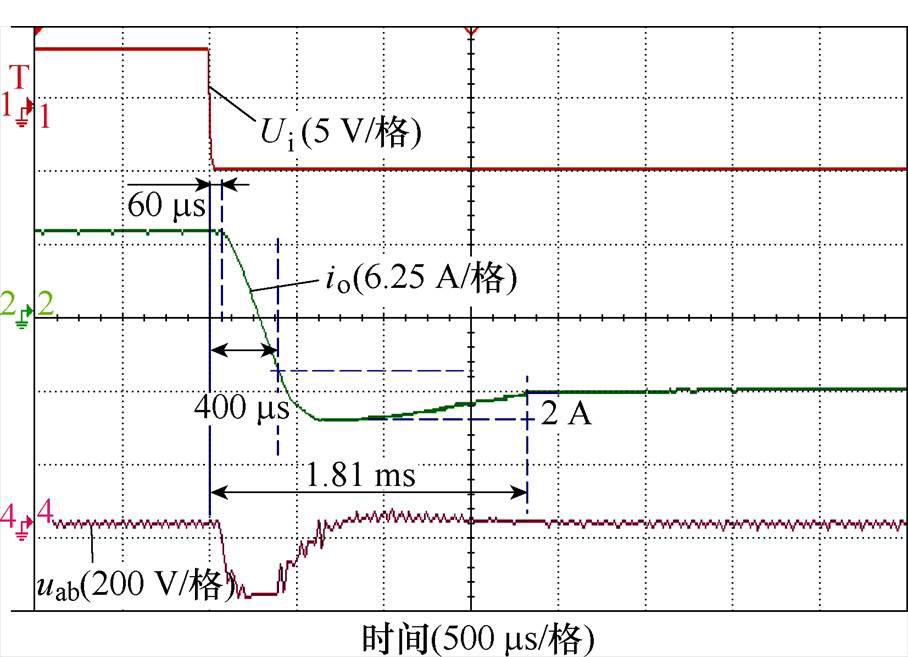
图17 所提控制策略下输出电流下降波形
Fig.17 Output current drop waveforms under the proposed control strategy
对比传统的PI控制,所提的改进灰色预测变增益单神经元PI控制使得输出电流超调更小,上升过程中的控制延时减少了40 ms,下降过程中的控制延时减少了50 ms。在超调更小的情况下,所提的控制策略比传统PI控制提前0.34 ms达到上升稳态值,提前0.29 ms达到下降稳态值,所提的控制策略具有更快的动态响应性能。所提的控制策略与传统PI控制具体性能对比见表1,在动态响应方面所提控制策略具有更大的优势。
表1 实验性能对比
Tab.1 Comparison table of experimental performance
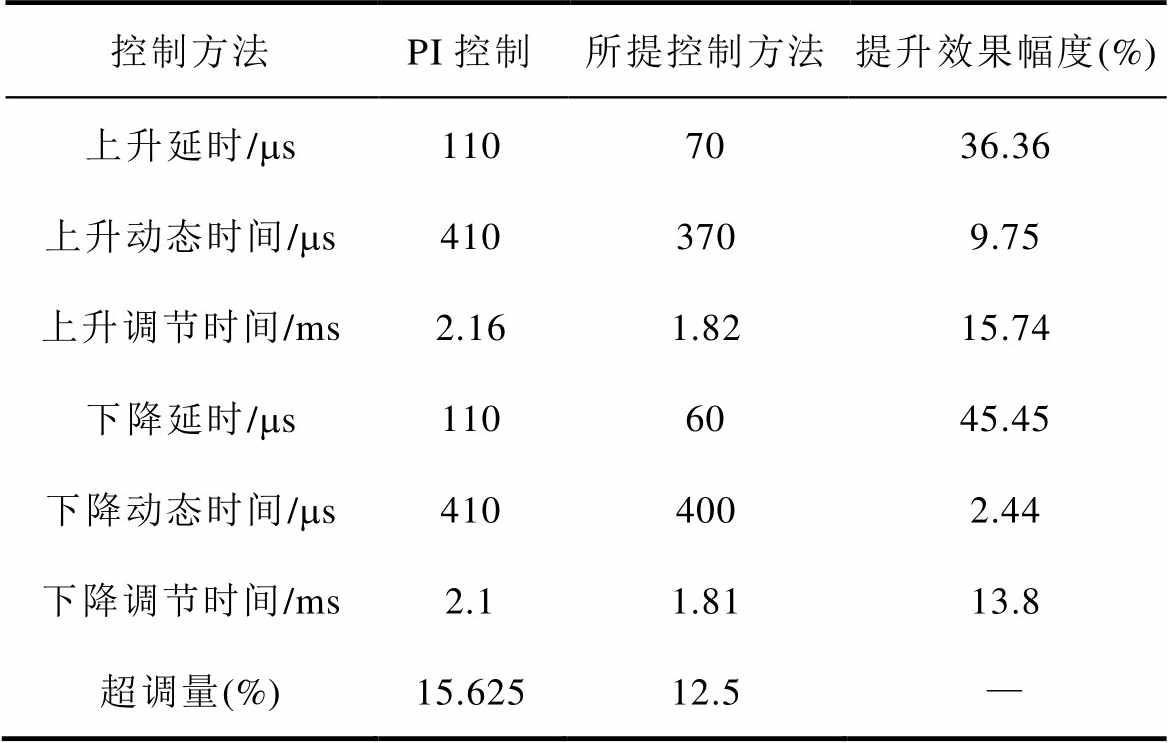
控制方法PI控制所提控制方法提升效果幅度(%) 上升延时/ms1107036.36 上升动态时间/ms4103709.75 上升调节时间/ms2.161.8215.74 下降延时/ms1106045.45 下降动态时间/ms4104002.44 下降调节时间/ms2.11.8113.8 超调量(%)15.62512.5—
为了改善传统滚动灰色预测PI控制在EAST快控电源中预测精度低和动态响应与超调难以平衡的问题,提出了一种改进灰色预测变增益单神经元PI控制方法,实现EAST快控电源输出电流的预测控制。改进的逐周期灰色预测在单个开关周期内等时长间隔采集输出电流4次作为原始序列,无需依赖历史采样信息,只需要经过一个开关周期延时即可实现输出电流预测,对比传统灰色预测具有更小的预测延时和更高的预测精度。根据预测电流与参考信号误差,自适应调整单神经元PI控制的输出增益,实现了超调和快速响应之间的平衡,对比传统PI控制,电流超调更小的情况下所提出的控制策略具有更快的动态响应速度。
参考文献
[1] Jiang Ping, Xing Yanjun, Wang Peiguang. No-load cutting-in control of the doubly fed induction generator based on grey prediction PI control[J]// Energy Reports, 2021, 7: 38-48.
[2] He Shengxiang, Wang Mingdong. Grey prediction PI control of direct drive permanent magnet synchronous wind turbine[C]//Proceedings of the 4th IEEE Con- ference on Energy Internet and Energy System Inte- gration, Wuhan, China, 2021: 2032-2035.
[3] 张红, 袁铁江, 谭捷. 统一能源系统氢负荷中长期预测[J]. 中国电机工程学报, 2021, 41(10): 3364- 3372, 3662.
Zhang Hong, Yuan Tiejiang, Tan Jie. Medium and long-term forecast of hydrogen load in unified energy system[J]. Proceedings of the CSEE, 2021, 41(10): 3364-3372, 3662.
[4] Pan Hongguang, Huang Xinyi, Guan Penglin, et al. Grey-prediction-based double model predictive control strategy for the speed and current control of per- manent magnet synchronous motor[J]. Asian Journal of Control, 2022, 24(6): 3494-3507.
[5] Huang Xianghui, Guan Penglin, Pan Hongguang, et al. Research on grey predictive control of PMSM based on reduced-order luenberger observer[J]. Journal of Electrical Engineering & Technology, 2021, 16(5): 2635-2646.
[6] Chang E C, Yang S C, Wu R C. Robust stable control design for AC power supply applications[J]. Elec- tronics, 2019, 8(4): 419-434.
[7] Salhein K, Ashraf J, Zohdy M. Output temperature predictions of the geothermal heat pump system using an improved grey prediction model[J]. Energies, 2021, 14(16): 5075-5066.
[8] 韦海燕, 陈静, 王惠民, 等. 新陈代谢灰色粒子滤波实现电池剩余寿命预测[J]. 电工技术学报, 2020, 35(6): 1181-1188.
Wei Haiyan, Chen Jing, Wang Huimin, et al. Remaining useful life prediction of battery using metabolic grey particle filter[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1181- 1188.
[9] 潘海鸿, 吕治强, 李君子, 等. 基于灰色扩展卡尔曼滤波的锂离子电池荷电状态估算[J]. 电工技术学报, 2017, 32(21): 1-8.
Pan Haihong, Lü Zhiqiang, Li Junzi, et al. Estimation of lithium-ion battery state of charge based on grey prediction model-extended Kalman filter[J]. Transa- ctions of China Electrotechnical Society, 2017, 32(21): 1-8.
[10] 陈琳, 陈静, 王惠民, 等. 基于小波包能量熵的电池剩余寿命预测[J]. 电工技术学报, 2020, 35(8): 1827-1835.
Chen Lin, Chen Jing, Wang Huimin, et al. Prediction of battery remaining useful life based on wavelet packet energy entropy[J]. Transactions of China Elec- trotechnical Society, 2020, 35(8): 1827-1835.
[11] 王磊, 李兵, 董超跃, 等. 城轨牵引变流器功率开关器件的双向加速老化测试与在线损伤预测[J]. 电工技术学报, 2019, 34(增刊1): 224-234.
Wang Lei, Li Bing, Dong Chaoyue, et al. Bidire- ctional accelerated aging test and online damage prediction of power switch devices in urban traction converter[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 224-234.
[12] Zeng Bo, Ma Xin, Shi Juanjuan. Modeling method of the grey GM(1,1) model with interval grey action quantity and its application[J]. Complexity, 2020: 1-10.
[13] Wu Weili. An intelligent gray prediction model based on fuzzy theory[J]. International Transactions on Electrical Energy Systems, 2022, 25:1-9.
[14] 薛阳, 张宁, 吴海东, 等. 基于UTCI-MIC与振幅压缩灰色模型的用户侧微电网短期负荷预测方法[J]. 电网技术, 2020, 44(2): 556-563.
Xue Yang, Zhang Ning, Wu Haidong, et al. Short- term load forecasting method for user side microgrid based on UTCI-MIC and amplitude compression grey model[J]. Power System Technology, 2020, 44(2): 556-563.
[15] 刘鑫, 张斌, 杨来宝, 等. 灰色预测模糊自适应 PID控制的城轨列车智能驾驶系统研究[J]. 测控技术, 2020, 39(3): 109-113.
Liu Xin, Zhang Bin, Yang Laibao, et al. Intelligent train operation system of urban rail transit based on grey predictive fuzzy adaptive PID control[J]. Measurement & Control Technology, 2020, 39(3): 109-113.
[16] Hou Li, Li Xiaolei, Wang Mingdong. Grey-fuzzy PI optimal control of MMC-HVDC system[C]//Pro- ceedings of the 4th IEEE Conference on Energy Internet and Energy System Integration, Wuhan, China, 2021: 3258-3262.
[17] 杨頔, 姚钢, 周荔丹. 功率变化环境下的四线制Vienna整流器优化联合控制方法[J]. 电工技术学报, 2021, 36(2): 305-319.
Yang Di, Yao Gang, Zhou Lidan. An improved control method of 4-wire Vienna rectifier considering power fluctuation[J]. Transactions of China Electro- technical Society, 2021, 36(2): 305-319.
[18] 周天豪, 杨智, 祝长生, 等. 电磁轴承高速电机转子系统的内模-PID控制[J]. 电工技术学报, 2020, 35(16): 3414-3425.
Zhou Tianhao, Yang Zhi, Zhu Changsheng, et al. Internal model control-PID control of an active magnetic bearing high-speed motor rotor system[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3414-3425.
[19] 刘其辉, 洪晨威, 逄思敏, 等. 基于弹性系数的双馈风电机组控制参数对次同步振荡作用分析及调整方法[J]. 电工技术学报, 2022, 37(14): 3528- 3541.
Liu Qihui, Hong Chenwei, Pang Simin, et al. Analysis and adjustment method of doubly-fed fan control parameters on subsynchronous oscillation based on impedance elastic sensitivity[J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3528- 3541.
[20] 周明宽, 夏俊芳, 郑侃, 等. 基于变增益单神经元PID的秸秆旋埋还田导航系统研制[J]. 农业工程学报, 2021, 37(5): 31-40.
Zhou Mingkuan, Xia Junfang, Zheng Kan, et al. Development of rotary straw burying and returning navigation system based on variable-gain single- neuron PID[J]. Transactions of the CSAE, 2021, 37(5): 31-40.
[21] 周向阳, 时延君. 惯性稳定平台单神经元/PID自适应复合控制与参数优化[J]. 仪器仪表学报, 2019, 40(11): 189-196.
Zhou Xiangyang, Shi Yanjun. Single neuron/PID adaptive compound control and parameter optimi- zation for the inertially stabilized platform[J]. Chinese Journal of Scientific Instrument, 2019, 40(11): 189-196.
[22] 王永涛, 肖俊辰. 基于改进灰色预测单神经元PID的URV伺服控制系统研究[J]. 兵器装备工程学报, 2021, 42(8): 251-257.
Wang Yongtao, Xiao Junchen. Research on URV servo control system based on improved grey prediction single neuron PID[J]. Journal of Ordnance Equipment Engineering, 2021, 42(8): 251-257.
[23] 汪凤凤, 黄海宏, 王海欣. EAST快控电源灰色预测PID控制预研[J]. 电子测量与仪器学报, 2015, 29(4): 604-610.
Wang Fengfeng, Huang Haihong, Wang Haixin. Pre-research on gray prediction PID control of EAST fast control power supply[J]. Journal of Electronic Measurement and instrumentation, 2015, 29(4): 604- 610.
[24] 黄海宏, 颜碧琛, 王海欣. 改进灰色GM(1,1)模型的EAST快控电源输出电流预测[J]. 电子测量与仪器学报, 2021, 35(5): 128-136.
Huang Haihong, Yan Bichen, Wang Haixin. Predi- ction of output current of EAST fast control power supply based on improved grey GM(1,1) model[J]. Journal of Electronic Measurement and Instru- mentation, 2021, 35(5): 128-136.
Abstract The current of load inductance in the experimental advanced superconducting Tokamak (EAST) fast control power supply is difficult to predict due to the influence of various uncertain environmental factors. An accurate object model is optional in grey prediction.
When the traditional rolling grey prediction is applied to the EAST fast control power supply, there is a specific prediction error at the abrupt signal, and at least 4 cycles of historical current data are needed to realize the current prediction of the next cycle. There are low prediction accuracy and long prediction delay problems for the edge of abrupt signal in the EAST fast control power supply. Therefore, an improved grey prediction algorithm is proposed to predict the output current. The output current is sampled 4 times at equal time intervals in a switching cycle as the original sequence. The rolling sampling prediction is changed to the cycle-by-cycle sampling prediction. Historical sampling information of the past several periods is needed to realize grey prediction, and four original sampling values of the current period are needed to realize the prediction of output current at the expense of the delay of one switching period. The original data sequence is composed of 4 times sampled at equal time intervals in a switching period, which avoids the value with non-exponential law in the original sequence and further improves the accuracy of grey prediction at the abrupt signal. The performance difference between improved grey prediction and traditional grey prediction is analyzed through convergence analysis. The improved grey prediction has a faster convergence speed and smaller prediction errors. Based on the objective function of the current tracking reference current at the next moment, a single neuron PI parameter adaptive adjustment network structure is constructed. The output gain of the single neuron proportional-integral (PI) control is adaptively adjusted according to the error between the predicted current and the reference current, and the PI parameter is adaptively adjusted online to realize the fast and accurate control of the output current.
The simulation results show that the improved grey prediction proposed in the EAST fast control power supply current prediction process has higher prediction accuracy than the traditional grey prediction. The improved grey prediction variable gain single neuron PI control can reduce the current overshoot and accelerate the output current response speed. Compared with the traditional PI control, the output current overshoot is reduced by 3.125%, the control delay and dynamic time in the rising process are reduced by 40 ms, reaching the rising steady state value 0.34ms ahead of time. The control delay and dynamic time during the drop are reduced by 50 ms and 10 ms. The steady-state value of the drop is reached 0.29 ms ahead. According to the theoretical, simulation, and experimental results, the improved grey prediction variable gain single neuron PI control method proposed can improve the prediction accuracy of the EAST fast control power supply current, reduce the prediction delay, suppress the overshoot of output current, and speed up the dynamic response speed of output current.
keywords:Experimental advanced superconducting Tokamak (EAST) fast control power supply, improved grey prediction, cycle by cycle sampling prediction, variable gain single neuron PI
DOI: 10.19595/j.cnki.1000-6753.tces.222367
中图分类号:TM93; TM917
国家自然科学基金区域创新发展联合基金资助项目(U22A20225)。
收稿日期 2022-12-23
改稿日期 2023-02-17
黄海宏 男,1973年生,教授,博士生导师,研究方向为新型大功率变流技术与电力电子技术等。E-mail: hhaihong741@126.com
陈 昭 男,1996年生,博士研究生,研究方向为新型电能变换技术等。E-mail: chenzhao_0202@163.com(通信作者)
(编辑 陈 诚)