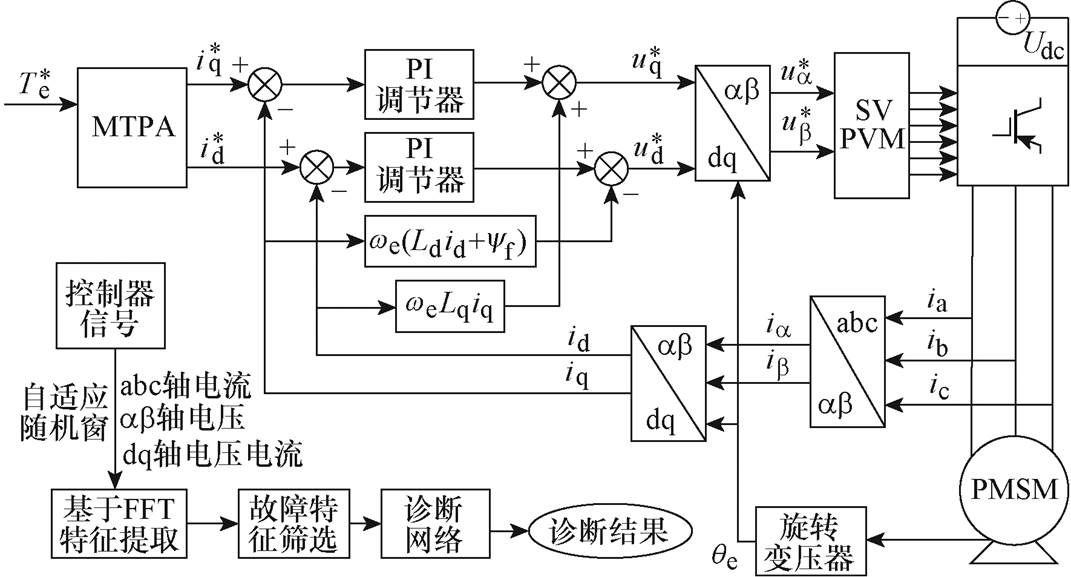
图1 基于MTPA的矢量控制系统及诊断流程
Fig.1 Vector control system based on MTPA and diagnostic process
摘要 绕组故障作为永磁同步电机常见的故障之一,严重影响电机正常运行。但由于电机运行工况复杂,故障特征波动严重,基于故障特征的诊断精度较低。为提高复杂工况下绕组故障的诊断精度,该文提出一种复杂工况下基于控制器信号的在线诊断方法。首先,对典型绕组故障进行故障机理分析,并通过基于自适应随机窗的快速傅里叶变换(FFT),提取控制器信号的相应故障特征;其次,通过研究单一工况和复杂工况下的各故障特征分布,揭示部分故障特征会在低转速工况下失效;再次,定义了复杂工况下故障特征性能指标,用于筛选故障特征;最后,在人工神经网络的基础上,提出了深度优化人工神经网络,引入批量归一化(BN)算法,并对深度网络结构残差化,提高网络泛化能力和诊断准确性。实验结果表明,通过计算故障特征性能指标,能够在诊断前对故障特征进行有效筛选,且深度优化人工神经网络的诊断准确性高、泛化能力强,在复杂工况下能够实现电机典型绕组故障的精确在线诊断。
关键词:永磁同步电机 绕组故障 在线故障诊断 特征提取 深度优化人工神经网络
近年来,永磁同步电机凭借其功率密度高和效率高等优势,广泛应用于工业机器人、轨道交通和电动汽车等领域[1-2]。然而,由于永磁同步电机工作环境恶劣、运行工况复杂,驱动电机的故障难以避免[3]。绕组故障作为永磁同步电机常见的故障之一,严重影响电机的正常运行[4-5]。当电机发生绕组故障时,绕组的对称性遭到破坏,甚至严重影响电机的正常运行。因此,复杂工况下的永磁同步电机典型绕组故障在线诊断具有重要意义[6]。
当电机发生绕组故障时,以电压、电流为代表的各种物理信号中将出现故障相关信息。通过对信号进行特征提取,可以得到表征电机状态的特征量。电机电流信号特征分析(Motor Current Signature Analysis, MCSA)作为应用广泛的诊断方法之 一[7-10],通过对稳态运行下的一相电流进行频谱分析,判断是否存在特定频率分量,进而对电机进行诊断。然而,由于永磁同步电机的运行工况复杂,不同运行工况下用于诊断的故障特征需要设置不同的阈值,使得故障特征阈值选取困难,诊断的准确性无法得到保证。除此之外,各种外部干扰、分析窗口的大小和时间戳位置都对诊断结果有着较大影响,导致MCSA方法无法及时准确地对故障进行诊断[11]。
随着对故障机理研究的深入,故障诊断所依赖的物理信号不再局限于定子相电流,故障特征的选取逐渐多元化[12-14]。文献[15]提出以三相电流不平衡度作为故障指标,实时监测电机状态,并验证了不同短路匝数和连接电阻下的故障特征的可靠性。文献[16]考虑负载变化对诊断的影响,提出了基于负序电流的永磁同步电机定子不对称故障的诊断方法。当电机在不同转速和转矩的复杂工况下运行时,故障特征的电机状态表征能力将在一定程度上被削弱,导致基于单一故障特征的诊断方法精度降低。
人工智能方法凭借其非线性拟合效果好、抗噪声能力强等优势,在电机故障诊断领域应用广 泛[17-19]。针对永磁同步电机工作环境复杂以及振动信号非线性、非周期性较强的特点,禹杭等提出了一种将主成分分析与随机森林结合的故障诊断方 法[20]。该方法以最值、峰度、偏度和前95%分位数等13个典型时域特征和数学统计特征作为故障特征,运用主成分分析对特征进行降噪、降维处理,最后用随机森林进行故障分类,有着较高的诊断精度和诊断速度。为实现电机在线故障诊断,M. Seera等提出了一种模糊最大最小分类回归树(Fuzzy Min- Max Classification and Regression Tree, FMM- CART)模型,不仅有着较高的诊断精度,还保持一定的可解释性[21]。尽管基于人工智能的故障诊断方法在复杂工况下诊断效果较好,但该方法却极其依赖高性能的故障特征。
为解决故障特征在复杂工况下性能较差的问题,本文提出了一种复杂工况下的永磁同步电机典型绕组故障在线诊断方法。本文以控制器中的电压电流信号作为诊断输入,根据电机故障机理,提取信号中的故障特征,节省了部分故障特征提取过程中的额外传感器成本。由于不同工况下的故障特征并非恒定值,受电机本身、诊断窗口位置、环境等因素影响,引入多维联合高斯分布,提出了复杂工况下的故障特征性能衡量指标。由于故障特征在不同工况下阈值选取困难,本文通过深度优化人工神经网络实现诊断,引入批量归一化(Batch Normali- zation, BN)算法,提高了模型的收敛速度和泛化能力[22],引入残差结构防止深层网络的退化[23],进一步提高了故障诊断的准确性。
在电机驱动控制系统中,基于最大转矩电流比(Maximum Torque Per Ampere, MTPA)控制策略应用十分广泛[24-27]。如图1所示为基于MTPA的矢量控制系统及相应的诊断流程。定子三相电流通过传感器传入控制系统中,并通过Clarke和Park等变换对信号进行转换,此时控制器内各信号中均含有电机的状态信息。通过带自适应随机窗的快速傅里叶变换(Fast Fourier Transform, FFT)对各种控制器信号进行特征提取,并对各故障特征进行分析,筛选高性能的故障特征。最后,通过诊断网络实现对永磁同步电机的精确诊断。
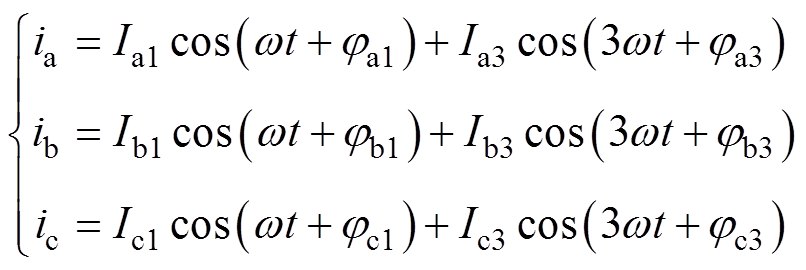
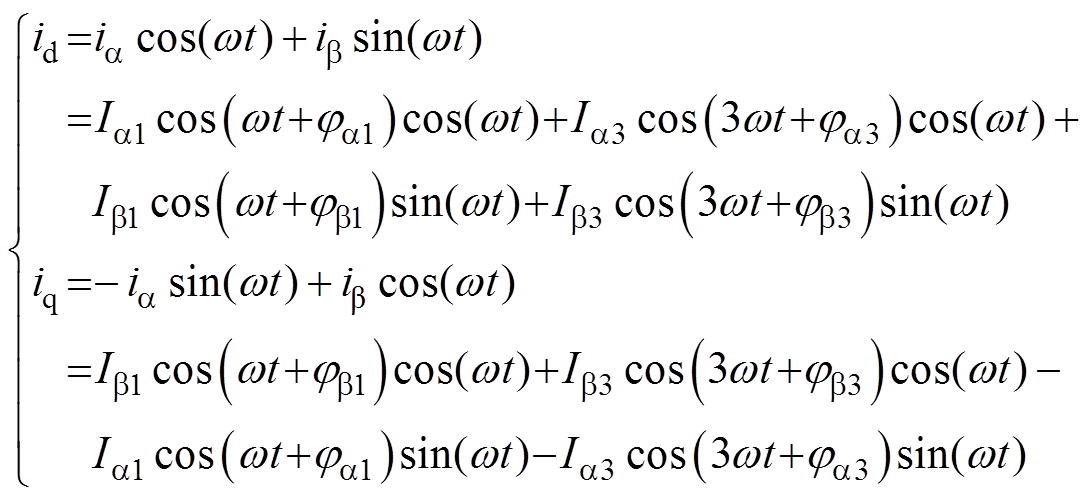
当电机发生绕组故障时,相电流中将出现3次谐波[28]。因此,绕组故障情况下的三相电流可表示为
图1 基于MTPA的矢量控制系统及诊断流程
Fig.1 Vector control system based on MTPA and diagnostic process
 (1)
(1)
式中,Ia1、Ib1、Ic1为各相基波幅值;Ia3、Ib3、Ic3为各相3次谐波幅值; 、
、 、
、 、
、 、
、 、
、 分别为各相基波和3次谐波相位;
分别为各相基波和3次谐波相位; 为角速度。
为角速度。
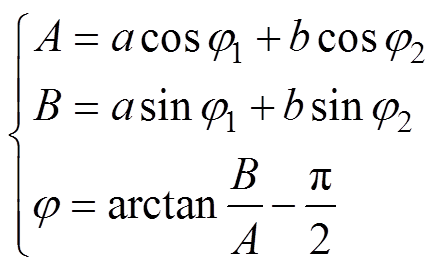
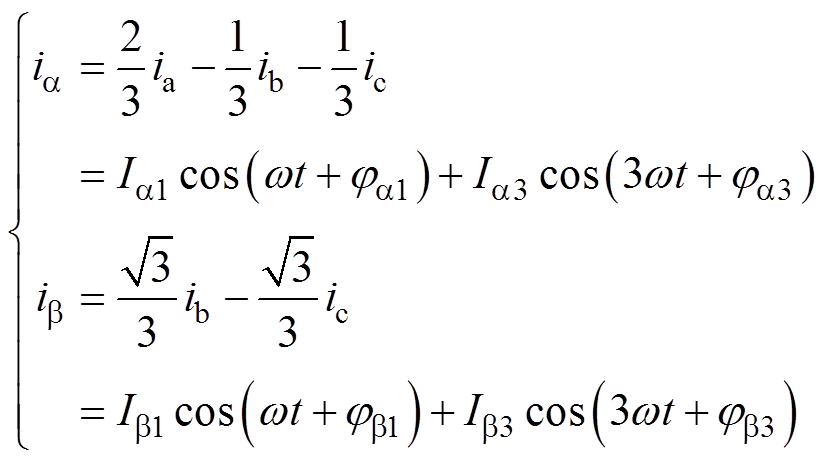
相电流通过Clarke变换得到ab轴电流。依据同频三角函数相加公式,可以得出ab 轴电流中出现3倍频的故障信息,相应计算公式为
 (2)
(2)
 (3)
(3)
式中,具有相同频率w 但幅值和相位分别为a、b、 、
、 的两个信号合并为一个频率不变但幅值相位不同的信号。
的两个信号合并为一个频率不变但幅值相位不同的信号。
 (4)
(4)
式中, 、
、 、
、 、
、 为ab 轴电流基波和3次谐波幅值;
为ab 轴电流基波和3次谐波幅值; 、
、 、
、 、
、 为ab 轴电流基波和3次谐波相位。
为ab 轴电流基波和3次谐波相位。
对ab 轴电流进行Park变换得到dq轴电流,有
 (5)
(5)
式中,由ab 轴电流3次谐波分量引起的dq轴电流增量如式(6)所示,绕组故障使得dq轴电流中出现2、4次谐波。
 (6)
(6)
式中,DId2、DId4、DIq2、DIq4分别为由ab 轴电流3次谐波引起的dq轴电流2、4次谐波的幅值; 、
、 、
、 、
、 为对应的相位。
为对应的相位。
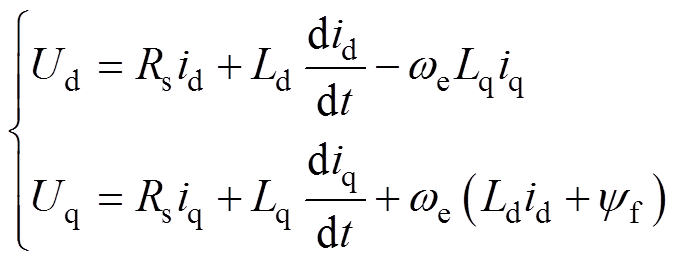
根据dq轴电压电流方程,在控制系统采用dq解耦控制的情况下,可以得出dq轴电流中由故障引起的2、4次谐波会导致dq轴参考电压出现异常2、4次谐波。
 (7)
(7)
式中,Ud、Uq、Ld、Lq分别为d、q轴电压和电感;Rs、 和
和 分别为定子绕组电阻、永磁磁链和电角速度。
分别为定子绕组电阻、永磁磁链和电角速度。
同理,dq轴参考电压的2、4次谐波经Park反变换后也会导致ab 轴参考电压出现异常3次谐波。
本文主要研究三相永磁同步电机,当电机发生绕组故障时,绕组的三相对称性遭到破坏,抑制3次谐波的能力下降,相电流中3次谐波分量增加。含有故障信息的相电流信号通过坐标变换和PI调节器,使得控制器中abc轴电流、ab 轴电流及参考电压、dq轴电流及参考电压都含有一定的故障信息可用于故障诊断。
由于同步电机基本特性的存在,基波频率与电机的转速呈正相关,不同转速下电机相电流的基频也不同,因此固定的特征提取窗口无法满足频谱分析的需要,影响故障特征提取的可靠性。为了使特征提取窗口适应不同转速的工况,引入基于自适应随机窗的FFT,精确提取故障特征。根据同步电机基本特性,转速和基波频率应严格满足
 (8)
(8)
式中,n为转速;f0为基波频率;p为极对数。
由于电机工作在不同工况下,abc轴的电流基波频率不同,且ab 轴和dq轴的故障频率为abc轴基波频率的整数倍,特征提取窗大小N应为
 (9)
(9)
式中,fs为信号采样频率;考虑到故障诊断是在稳态下进行,k默认取1;round( · )为取整函数。
本文针对匝间短路故障和绕组开路两类典型绕组故障进行有限元仿真分析,相应的故障仿真模型如图2所示。A相共有3条支路,每条支路由3个线圈串联而成,本文所研究的绕组故障均发生于A相的第三条支路的第一个线圈。其中,绕组开路故障为整个线圈开路,而匝间短路故障为线圈内一股导体与另一股导体之间发生的2匝匝间短路,R为发生短路时的绝缘电阻,这里R=0.1 mW。
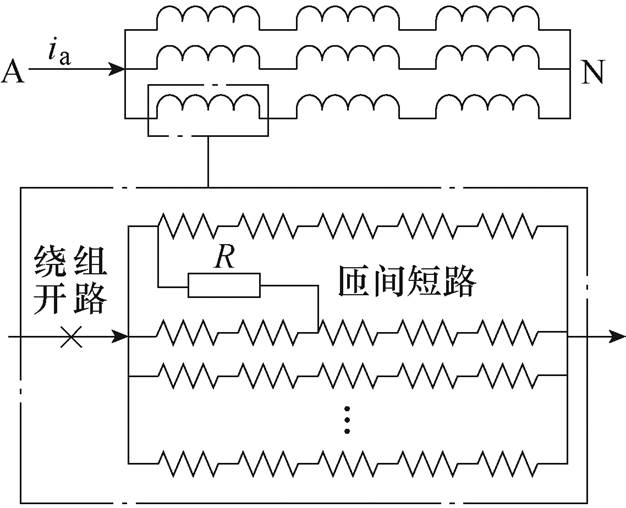
图2 典型绕组故障仿真模型
Fig.2 Simulation model of typical winding faults
如图3所示为三相电机在不同转速下的故障特征仿真结果。电机发生故障时,每相电流的3次谐波分量都会增加。当电机低速运行时,由于匝间短路故障的严重程度较低,3次谐波含量上升幅度不大。在不同转速下,绕组开路和匝间短路存在一定程度上的混淆,很难确定一个阈值实现对故障诊断。
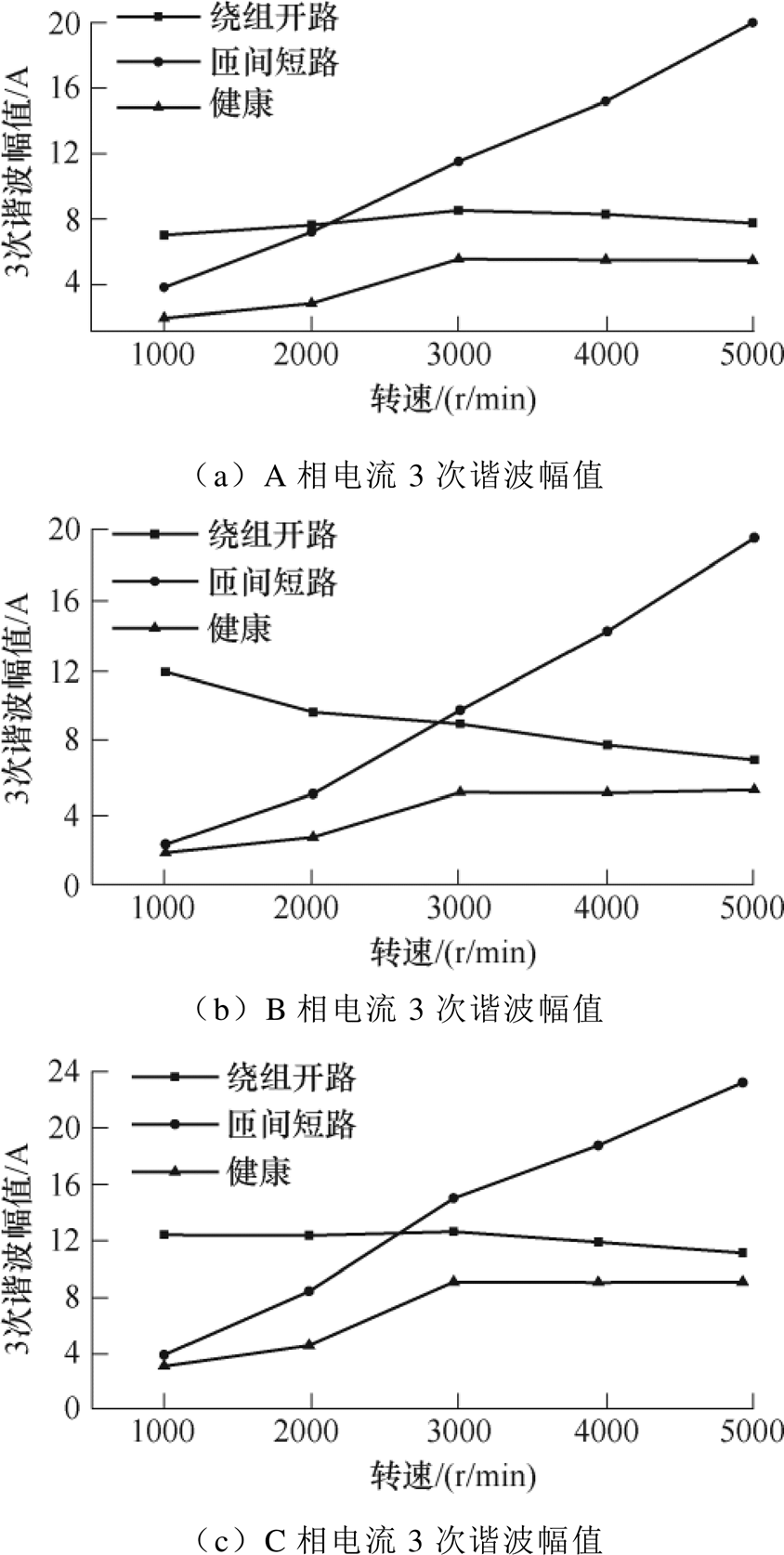
图3 不同转速下三相电流故障特征
Fig.3 Three-phase current fault features at different speeds
在电机的运行过程中,除了转速以外,转矩也是重要的影响因素[29]。此外,受环境等其他因素影响,电机在不同工况下的故障特征不再是一个恒定值,而是满足一定条件的概率分布。为综合衡量故障特征的综合性能,需对单一工况和复杂工况下电机运行过程中的实验数据进行故障特征性能分析。高性能的故障特征能为基于故障特征的高性能故障诊断方法提供保障。
受环境、采样设备误差、计算误差等多种因素影响,即使电机工作在单一的稳态工况下,各种故障特征也会随着特征提取窗口的不同而不断变化。相较于电机的仿真数据,实际运行过程中故障特征值波动会更大。部分性能较差的故障特征受外部因素干扰,会失去表征电机状态的能力,无法作为电机故障诊断的依据。
如图4所示为转速为500 r/min、转矩为20 N·m下的电机实际运行过程中经过特征提取得到的故障特征分布结果,这里选择故障相的相电流3次谐波幅值和d轴电压电流的2次谐波幅值作为主要分析对象。受传感器的采样误差和计算误差的影响,单一工况稳态下的故障特征仍存在一定波动,每种电机状态进行100次独立的故障特征提取,并依据故障特征的数值分布拟合相应的正态分布曲线。如图4a所示,其中故障相电流3次谐波幅值性能较差,健康状态和匝间短路状态的分布大部分发生了混叠,无法作为诊断的依据。如图4b、图4c所示,d轴电压电流的2次谐波幅值性能较好,不仅故障特征分布混叠的情况发生较少,而且健康和绕组开路的分布方差较小、分布均值差异较大,特征量明显且抗干扰能力强,能够很好地区分和判别各种电机状态。
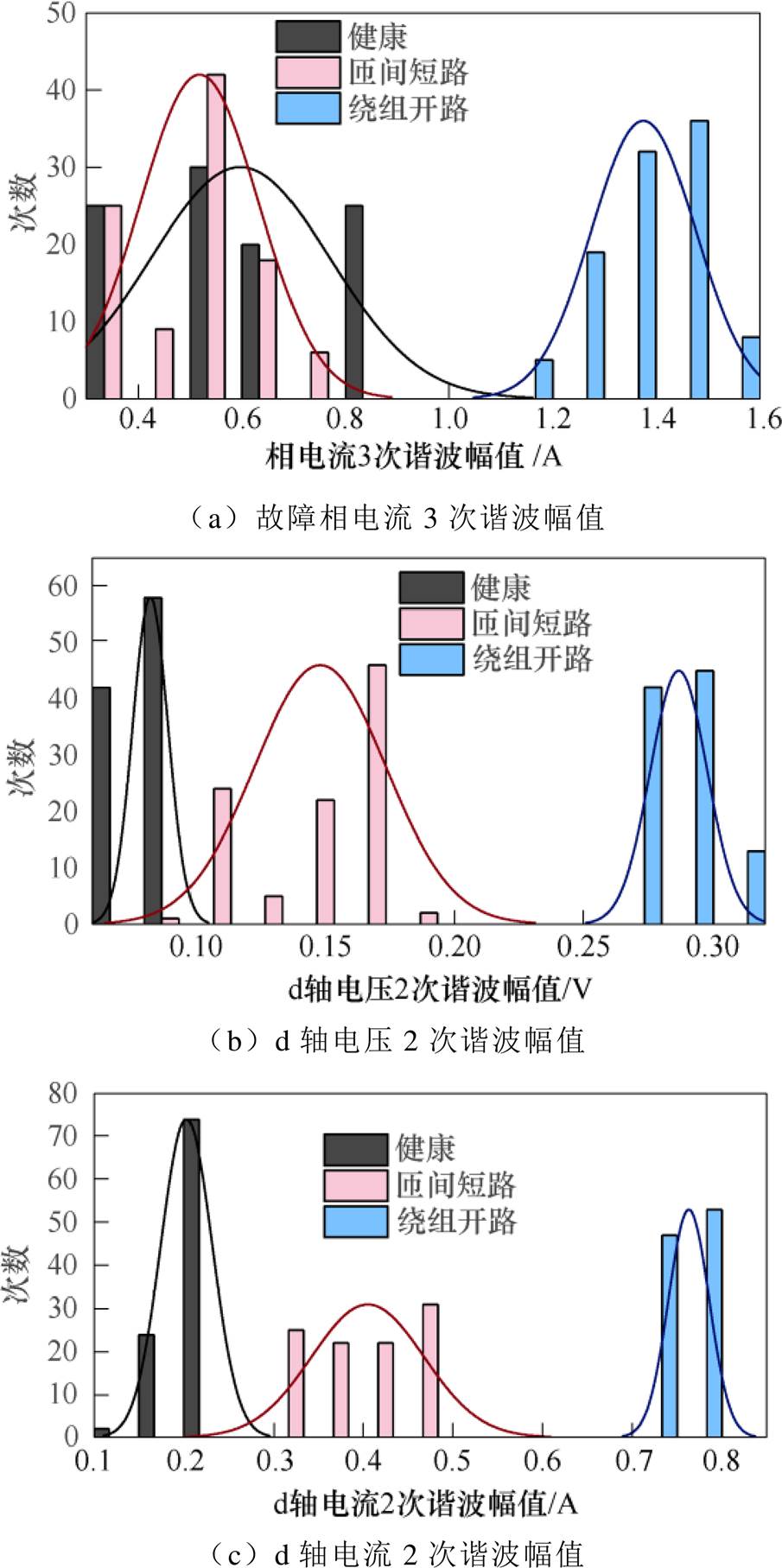
图4 单一工况下不同故障特征分布
Fig.4 Distribution of different fault features under a single operating condition
由于在单一工况下对电机进行故障诊断有着一定局限性,为保障电机在各种工况下都能够很好地实现诊断,故障特征在复杂工况下都应有着良好的性能。转速和转矩作为对电机影响最为严重的两种工况因素,本文通过分析不同转速和转矩下故障特征分布,研究复杂工况下电机故障特征变化规律。
如图5所示为以不同转速和转矩为代表的复杂工况下的故障特征分布,这里选择故障相的相电流3次谐波幅值和d轴电压、电流的2次谐波幅值作为主要分析对象,包括健康、匝间短路和绕组开路三种电机状态。每种电机状态在单一工况下进行100次独立的特征提取,并通过散点的形式呈现。其中部分故障特征在低转速工况下会失效。以故障相电流3次谐波幅值为代表的故障特征在低转速的工况下,分布发生了混叠现象,无法作为诊断的依据,性能较差。此外,转速越大,故障特征的单一工况分布的类间距越大、分布方差较小,更容易区分各种电机状态且抗干扰能力强,相应的故障特征性能也越好。转矩也是故障特征的重要影响因素之一,转矩较低时,故障特征更为明显。
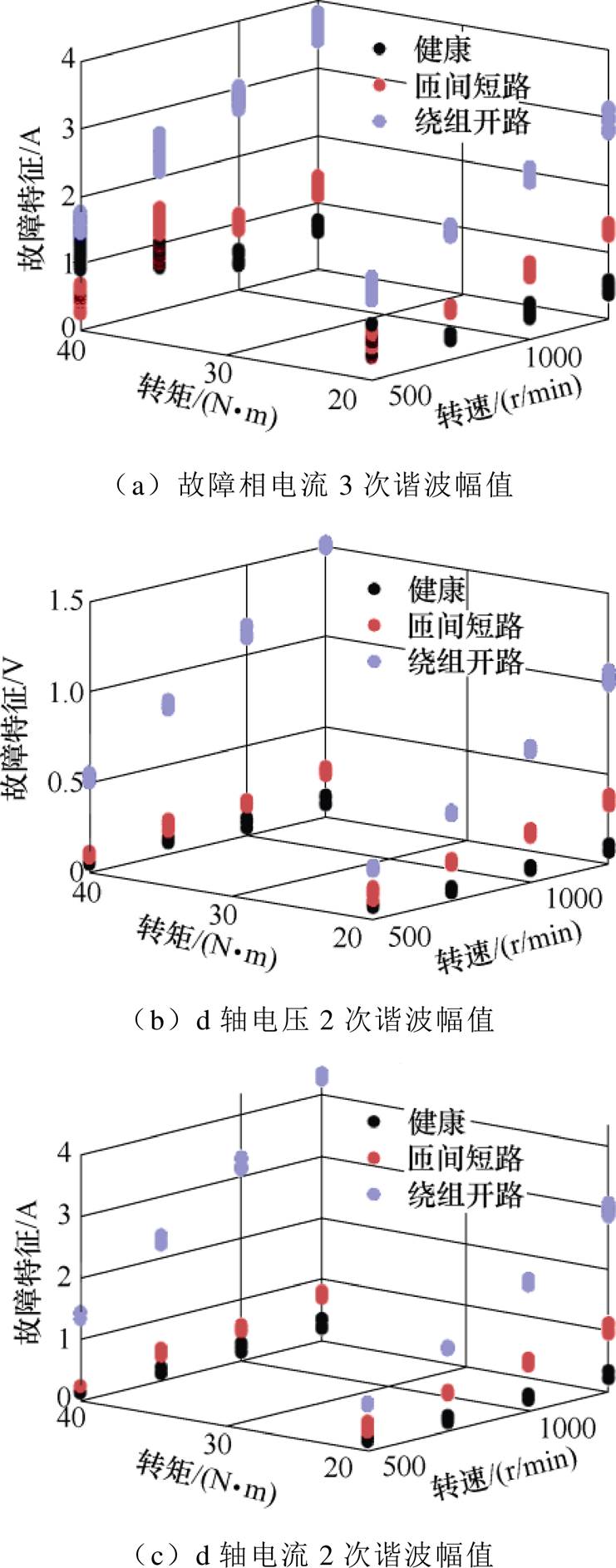
图5 复杂工况下不同故障特征散点分布
Fig.5 Scatter distribution map of different fault features under complex operating conditions
人工神经网络(Artificial Neural Network, ANN)是一种模拟人脑处理信息能力的网络,具有强大的自学习能力和快速求解能力,广泛应用于模式识别等领域[30-31]。故障特征有着很好的表征电机状态的能力,高性能的故障特征能够很好地保证基于ANN的故障诊断准确性。但是,受外部因素影响,故障特征在部分工况性能较差,各种模式会发生混叠。为提高诊断网络在复杂工况下的精确性,通过提高ANN的深度,并优化网络的结构,提高网络对复杂工况的适应能力。
由于导入网络中故障特征量纲差异较大,故障特征直接作为网络输入时会使网络对某一故障特征格外关注,从而使得其余特征失效。为了保证各故障特征都能在诊断网络中发挥作用,引入BN算法[32],消除量纲对故障特征的影响,即
 (10)
(10)
式中,x和y分别为网络层的输入和输出; 为输入特征的均值;
为输入特征的均值; 为输入特征的方差;
为输入特征的方差; 和
和 分别为训练得到的权重和偏置;
分别为训练得到的权重和偏置; 为容许误差。与常规的归一化算法相比,BN算法增设了两个可训练的权重和偏置参数,批量归一化前后的分布差异不大,保证激活函数不受归一化的影响。同时,网络结构中加入BN层能够加快训练速度,并且还能有效提高网络的泛化能力,使得故障诊断在训练集以外的工况下也能保证一定的准确性。
为容许误差。与常规的归一化算法相比,BN算法增设了两个可训练的权重和偏置参数,批量归一化前后的分布差异不大,保证激活函数不受归一化的影响。同时,网络结构中加入BN层能够加快训练速度,并且还能有效提高网络的泛化能力,使得故障诊断在训练集以外的工况下也能保证一定的准确性。
由于部分故障特征本身性能较差以及故障特征在部分工况下不明显,传统的ANN无法满足故障诊断的精度要求。为提高诊断的精度,满足故障诊断在复杂工况下的需求,提高网络的深度就显得尤为关键。但当网络达到一定深度时,继续提高深度,网络会出现退化现象。残差化网络结构通过简化冗余层,当网络在一定深度达到理论最优时,其余层实现恒等变换,防止退化现象出现[33]。此外,残差化的网络结构还能有效解决训练过程中可能出现的梯度消失。如图6所示为残差化的网络结构。
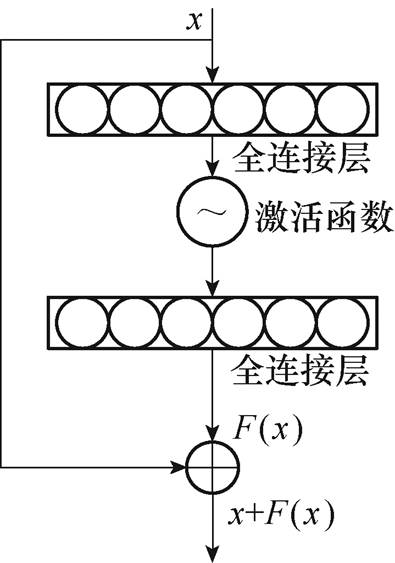
图6 残差化网络结构
Fig.6 Residual network structure
图6中,F(x)为该部分残差结构中非线性变换函数。当该部分为有效层且激活函数选择tanh函数时,F(x)应满足
 (11)
(11)
式中, 、
、 、b1、b2分别为训练得到的全连接层的权重和偏置。当该部分为冗余层时,F(x)置零,实现恒等变换,对诊断结果几乎没有影响。
、b1、b2分别为训练得到的全连接层的权重和偏置。当该部分为冗余层时,F(x)置零,实现恒等变换,对诊断结果几乎没有影响。
本文主要基于BN优化的残差化深度ANN实现对故障的诊断,如图7所示为诊断的网络结构。首先,对提取的故障特征进行随机打乱,并通过BN层消除故障特征量纲的影响;其次,通过堆叠的残差化网络结构实现故障特征的非线性变换,并通过BN实现相邻残差化网络结构的连接;最后,通过Softmax层实现对故障特征的类别区分,并输出故障诊断的结果。
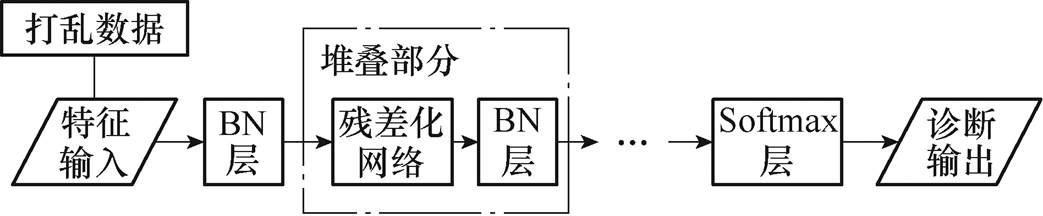
图7 深度优化人工神经网络
Fig.7 Deep optimization artificial neural network
本文针对电机实际运行过程中较为常见的典型绕组故障进行实验,并依据实验数据进行特征提取、训练以及诊断。故障类型主要包括绕组开路和不同严重程度的匝间短路,相应的故障类型和故障描述见表1。
表1 故障类型编码
Tab.1 Fault type code

故障类型编码故障类型故障描述 1健康健康 2匝间短路绕组并绕匝间短路2匝 3匝间短路绕组并绕匝间短路4匝 4绕组开路1个线圈开路
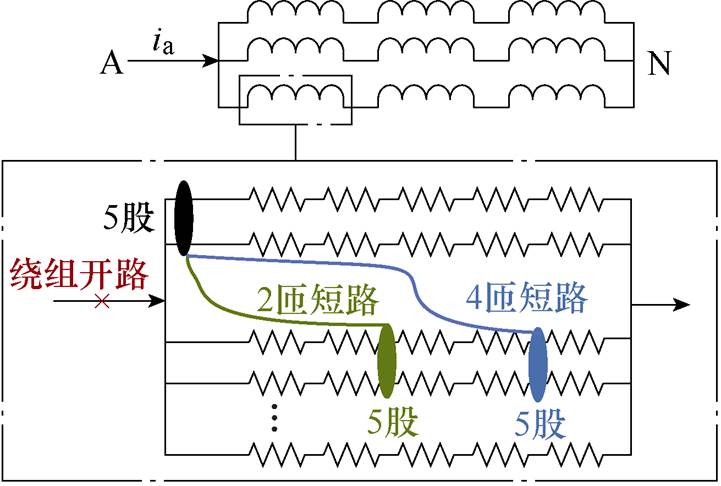
图8 电机的故障实验
Fig.8 Failure experiments on electric motors
实验所针对的匝间短路故障和绕组开路故障均发生于A相第三条支路的第一个线圈。通过将A相第三条支路的绕组端部导出至电机机壳,与空气开关相连,最后通过空气开关实现绕组开路故障的模拟。此外,将该线圈端部的5股导体并绕导出至电机机壳,并将该线圈相隔2匝和4匝位置的5股其余导体并绕导出至电机机壳,与空气开关相连,最后通过空气开关实现不同严重程度的匝间短路故障的模拟。
本文选取的工况信号包括转速和转矩信号。其中,转速为500~1 250 r/min,转速步长为250 r/min;转矩为20~40 N·m,转矩步长为20 N·m。本文选择控制器中的电压电流信号作为诊断信号,并通过自适应随机窗对诊断信号提取相应的故障特征,各种工况下每种诊断信号均提取100组故障特征,总计3 200组故障特征,并按照8 11划分为训练集、验证集与测试集。提取的故障特征见表2。
11划分为训练集、验证集与测试集。提取的故障特征见表2。
图9所示为不同故障类型电机的实验波形,对应的转速转矩分别为500 r/min和20 N·m,采样频率为8 000 Hz,其中频谱图为包含一个电周期的随机窗频谱分析结果。
在单一工况下各故障特征受其他因素影响,近似满足高斯分布,相应的概率密度应为
表2 基于控制器信号的故障特征
Tab.2 Fault features based on controller signal

序号故障特征故障特征描述 1Ia3A相电流3次谐波幅值 2Ib3B相电流3次谐波幅值 3Ic3C相电流3次谐波幅值 4Id2d轴电流2次谐波幅值 5Id4d轴电流4次谐波幅值 6Iq2q轴电流2次谐波幅值 7Iq4q轴电流4次谐波幅值 8Ua3a 轴电压3次谐波幅值 9Ub3b 轴电压3次谐波幅值 10Ud2d轴电压2次谐波幅值 11Ud4d轴电压4次谐波幅值 12Uq2q轴电压2次谐波幅值 13Uq4q轴电压4次谐波幅值
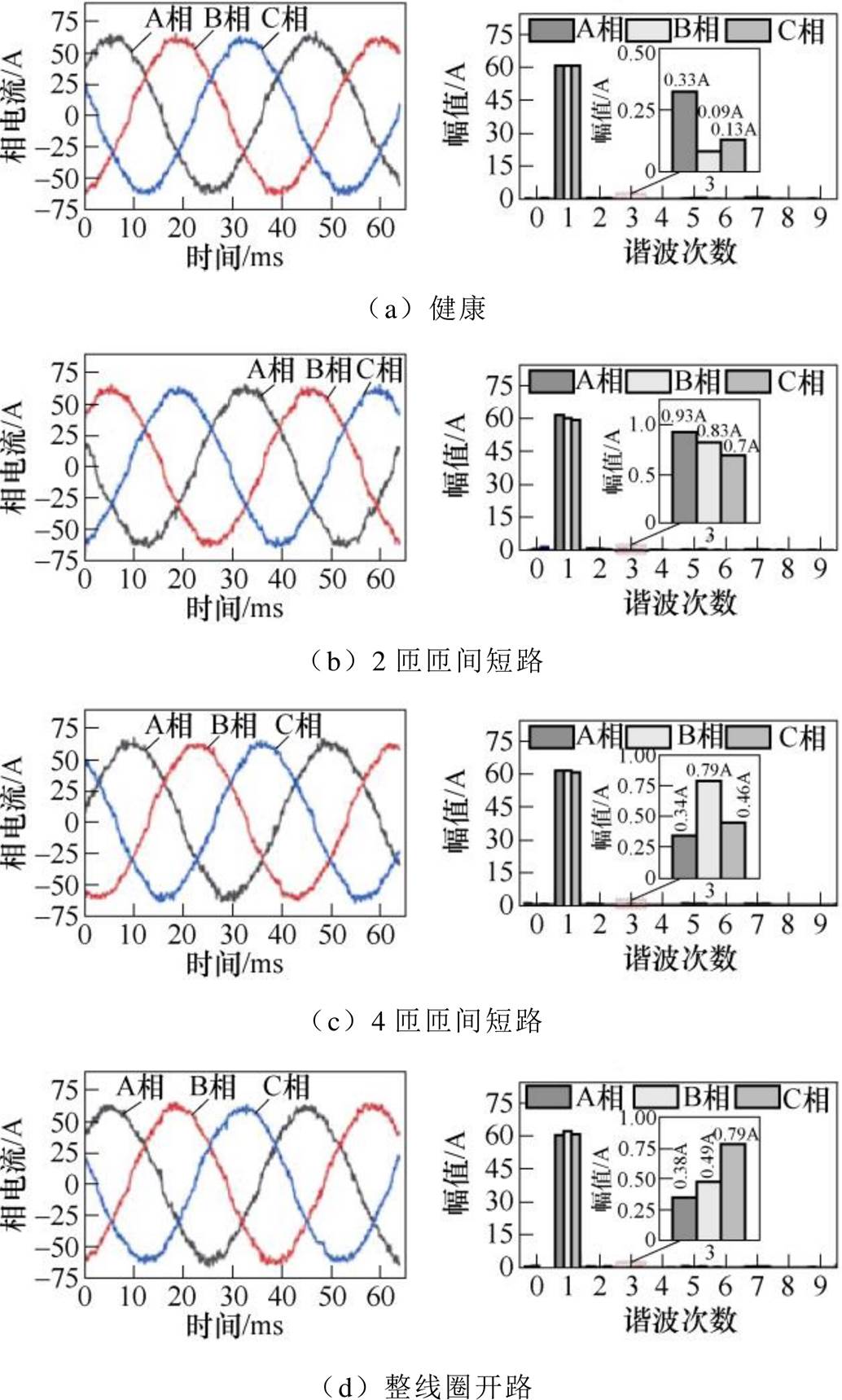
图9 不同故障类型电机的相电流波形及频谱
Fig.9 Phase current waveforms and spectra of motors with different fault types
 (12)
(12)
式中,i为电机故障类型编码;j为电机的运行工况编号; 为该工况下的第i类电机的故障特征;
为该工况下的第i类电机的故障特征; 为该工况下第i类电机故障特征的分布均值;
为该工况下第i类电机故障特征的分布均值; 为相应的分布方差。
为相应的分布方差。
当故障特征抗干扰能力强时,其分布方差会相对较小,同时考虑到不同故障特征的量纲不同,选择单一工况下的平均分布均值作为基准,定义复杂工况下故障特征的稳定性Sf为
 (13)
(13)
式中,m为实验所覆盖的电机运行工况总数;n为电机故障类型总数(含健康状态)。
此外,故障特征应能够作为区分各种电机状态的依据,即故障特征的类间距应足够大。考虑到正态分布特性,即
 (14)
(14)
可认为各故障特征在单一工况下的分布区间为 -
- ,+
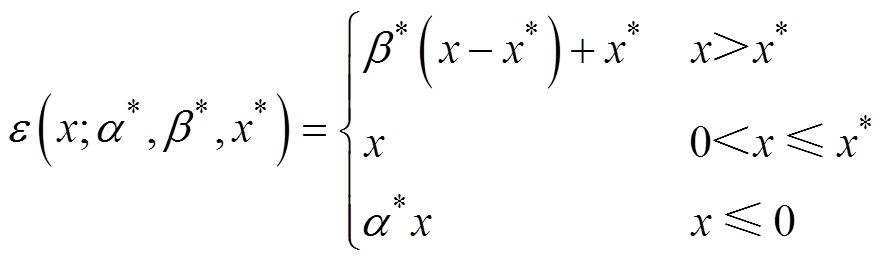
,+ 。因此,可通过类间距定义复杂工况下故障特征的有效性Ef。单一工况下,各电机状态的故障特征分布均值可按大小顺序排列,即
。因此,可通过类间距定义复杂工况下故障特征的有效性Ef。单一工况下,各电机状态的故障特征分布均值可按大小顺序排列,即
 (15)
(15)
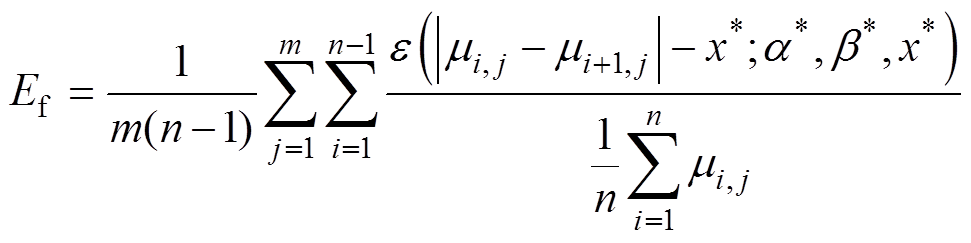 (16)
(16)
式中,e(x)为可调的惩罚函数;x*为标准类间距; a*为混叠惩罚因子;b*为局部惩罚因子。由于故障特征性能主要取决于可能发生混叠的工况,引入混叠惩罚因子a*加深混叠现象对Ef的影响。此外,当类间距大于标准类间距 时,继续增大类间距对故障精确性的影响不大,因此引入局部惩罚因子减弱局部过大类间距对Ef的影响。通过调节混叠惩罚因子a*和局部惩罚因子b*,更好地表征故障特征的有 效性。
时,继续增大类间距对故障精确性的影响不大,因此引入局部惩罚因子减弱局部过大类间距对Ef的影响。通过调节混叠惩罚因子a*和局部惩罚因子b*,更好地表征故障特征的有 效性。
 (17)
(17)
 (18)
(18)
复杂工况下故障特征的性能往往决定了诊断网络的准确性的上限。本文通过分析单一工况下故障特征的分布,提出了复杂工况下衡量故障特征性能的指标:稳定性Sf和有效性Ef。为测试故障特征性能指标可靠性,本文选择如表2所示的13种故障特征,分析并计算各故障特征的性能指标,并通过深度优化人工神经网络对含工况信息的各故障特征进行诊断,通过诊断的准确性验证故障特征的性能指标。其中,电机状态总数n=4,实验数据覆盖的工况总数m=8,电机故障相为A相。深度优化人工神经网络的参数设置见表3。基于各种故障特征的诊断网络准确率见表4。
表3 深度优化ANN参数设置
Tab.3 Deeply optimize ANN parameter settings
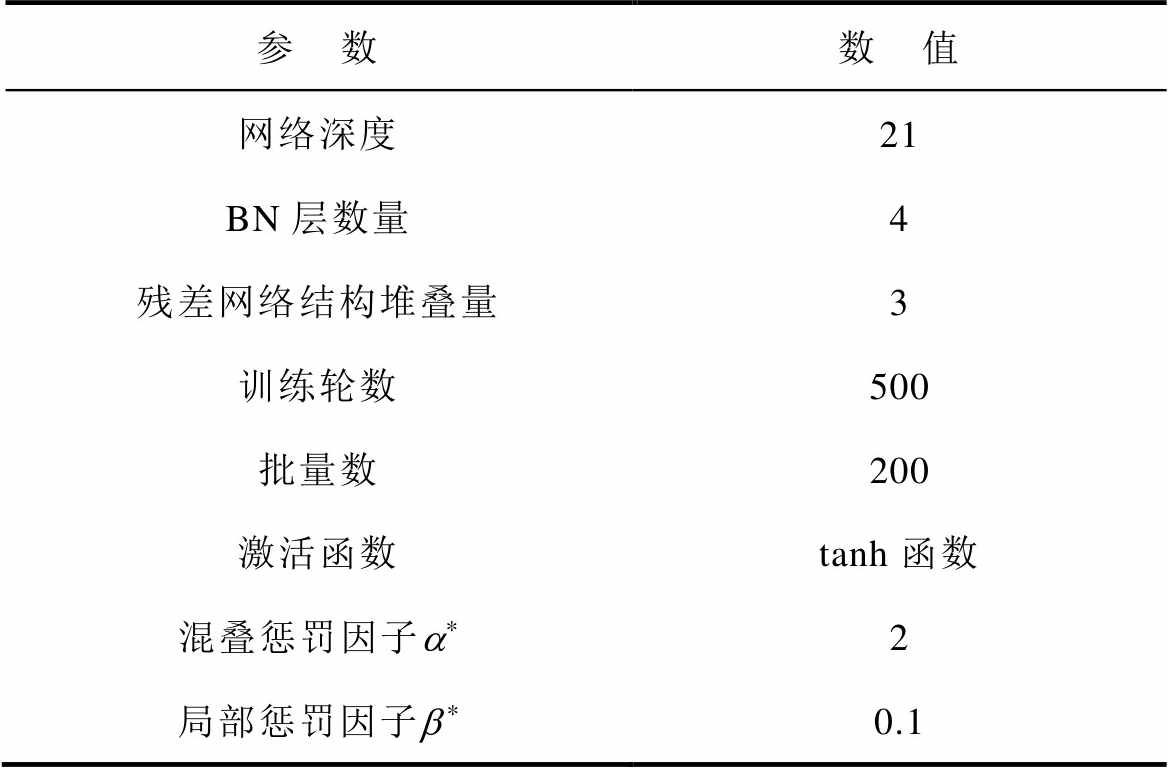
参 数数 值 网络深度21 BN层数量4 残差网络结构堆叠量3 训练轮数500 批量数200 激活函数tanh函数 混叠惩罚因子a*2 局部惩罚因子b*0.1
通过对比各故障特征的诊断准确性,以Id2为代表的五类故障特征的故障诊断准确率均大于95%;相应的故障特征稳定性Sf均在95%以上,相应的故障特征有效性Ef均大于零,验证了复杂工况下故障特征性能指标可靠性。根据故障特征性能,可对故障特征进行筛选,高性能的故障特征能为故障诊断提供有力的理论支撑,保证诊断的精确性。
根据故障特征性能分析结果,选择Iq2、Ub3、Uq2和工况信号作为诊断的特征输入,通过深度优化ANN得到的诊断结果如图10所示。故障类型编号见表1,每种类型含有800个独立的故障特征样本。当诊断结果与实际类型相同时,即可认为诊断准确,并统计不同诊断情况的累计结果。其中,基于Iq2和Uq2的误诊情况基本都为匝间短路故障严重程度判别错误,对故障处理影响不大。基于Ub3的误诊情况基本为匝间短路2匝的情况。
表4 故障特征性能与诊断精度
Tab.4 Fault feature performance and diagnostic accuracy

故障特征稳定性Sf(%)有效性Ef诊断准确率(%) Ia391.23-0.376 791.09 Ib387.89-0.751 579.88 Ic386.98-1.256 275.44 Id295.460.126 496.91 Id492.56-0.105 577.59 Iq296.450.222 999.09 Iq490.18-0.142 086.44 Ua392.71-0.035 992.53 Ub395.110.069 098.41 Ud295.390.034 895.66 Ud492.59-0.034 578.06 Uq296.600.155 499.06 Uq490.21-0.097 983.38
实验针对加载工况信号的Iq2、Ub3和Uq2作为诊断的特征输入,对不同诊断网络与深度优化ANN进行对比分析,各种诊断网络的效果对比见表5。
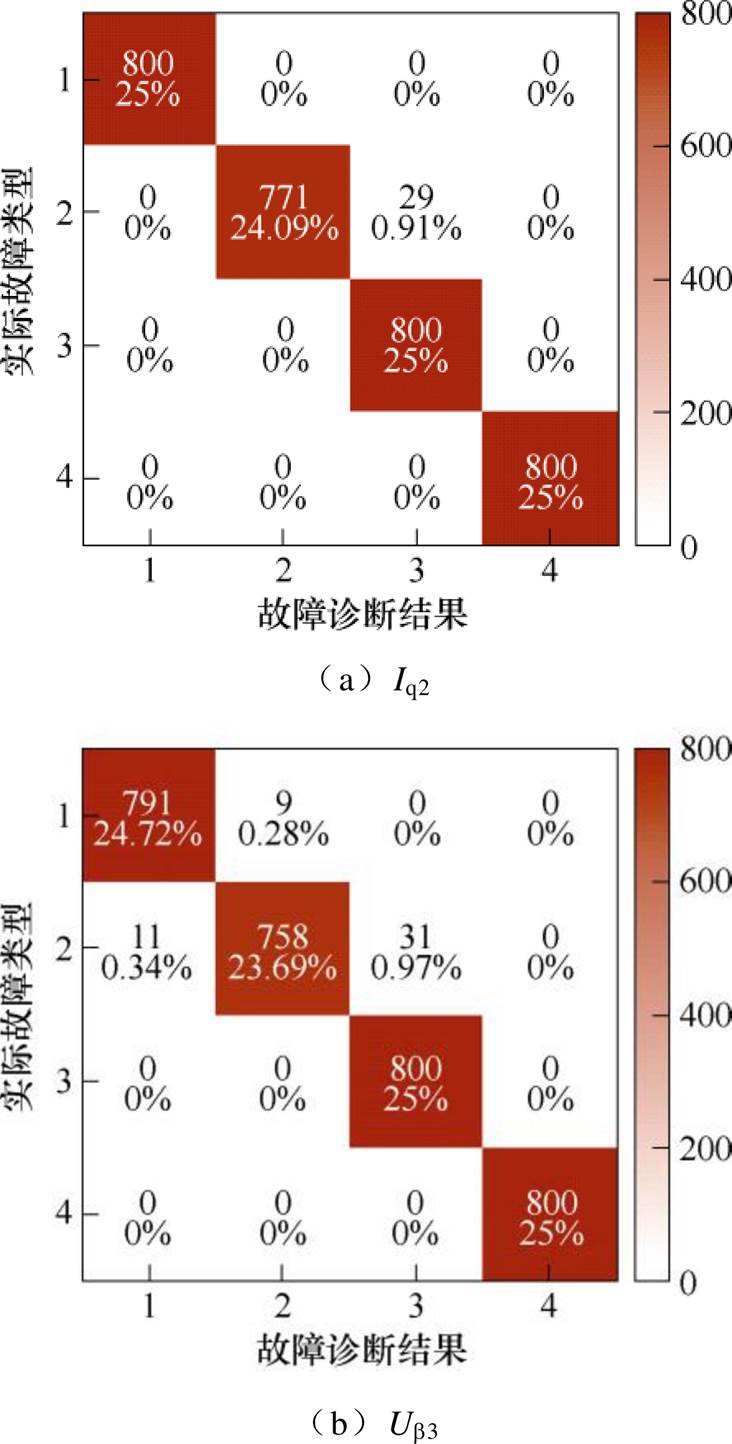
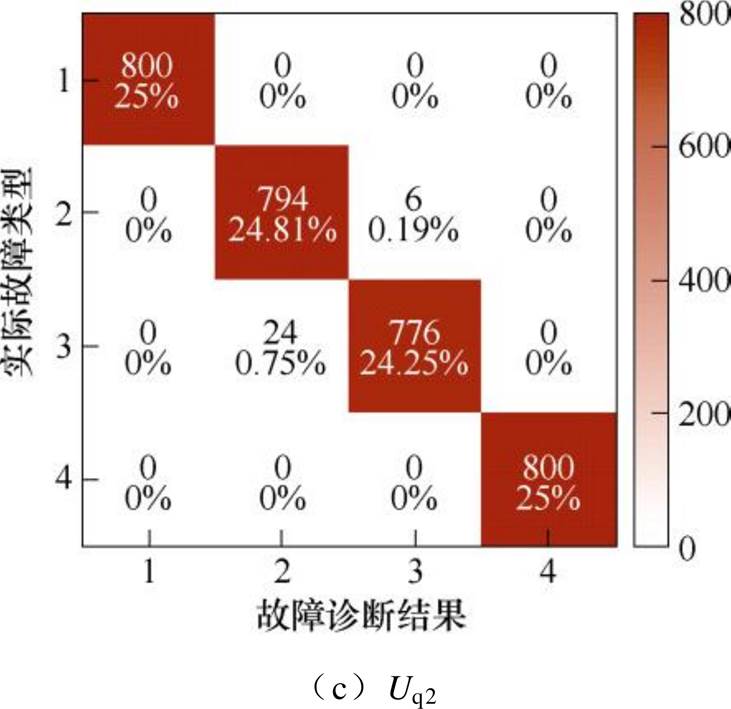
图10 不同故障特征诊断结果的混淆矩阵
Fig.10 Confusion matrix of diagnostic results for different fault features
表5 诊断网络效果对比
Tab.5 Diagnostic network performance comparison

输入特征诊断网络训练集准确率(%)验证集准确率(%)测试集准确率(%) Iq2转速转矩K近邻98.5299.0698.75 随机森林98.7998.7598.75 ANN95.4395.6395.63 深度优化ANN99.0699.0699.38 Ub3转速转矩K近邻95.5995.3195.00 随机森林98.2498.4498.44 ANN94.1093.4492.81 深度优化ANN98.4896.8899.38 Uq2转速转矩K近邻98.9199.0699.06 随机森林99.8898.7599.06 ANN98.5298.7598.75 深度优化ANN99.6998.9599.38 Iq2Ub3Uq2转速转矩K近邻99.1499.3899.38 随机森林99.1499.3899.38 ANN98.7199.0699.38 深度优化ANN99.8010099.69
实验结果表明,针对永磁同步电机典型绕组故障的单故障特征诊断,深度优化ANN能够充分利用故障信息,有着更高的诊断准确率和更好的泛化能力。在部分故障特征上,深度优化ANN的训练集和验证集准确率略低于其他诊断方法,但经过去离群值处理后,最后在测试集上性能最优。且对于永磁同步电机绕组故障的多故障特征综合诊断,深度优化ANN有着更高的准确率。
本文提出了一种复杂工况下的永磁同步电机典型绕组故障在线诊断方法。基于绕组故障机理,分析了以电压电流为代表的控制器信号中的故障信息,提出通过自适应随机窗实现精确的故障特征提取。根据电机不同转速下的单一工况仿真结果,验证了单一工况下故障特征的可靠性。由于电机在实际运行过程中,故障特征受外部因素影响,不再保持恒定。通过分析单一工况和复杂工况下电机各故障特征分布,判断部分故障特征在低转速工况下会失效。此外,基于ANN,本文提出了深度优化ANN,通过BN算法消除了各故障特征的量纲的影响,提高了诊断模型的泛化能力,并通过深度网络残差化,进一步提高了诊断网络的准确性。
本文通过复杂工况下的电机实验对诊断网络的效果进行了验证。首先根据控制器信号提取了13种故障特征,并根据其在复杂工况下的分布情况,基于单一工况下的分布均值、分布方差和类间距,提出了复杂工况下故障特征的稳定性和有效性。通过对比不同故障特征的诊断准确率,当故障特征稳定性在95%以上、有效性大于0的情况下,诊断精确性高,并据此对故障特征进行筛选。最后,选择性能最好的3个故障特征,通过对比不同诊断方法的准确率,验证了深度优化ANN的准确性和泛化能力,实现了复杂工况下的电机典型绕组故障的准确在线诊断。
参考文献
[1] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
Liu Jilong, Xiao Fei, Shen Yang, et al. Position- sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88.
[2] Wang Xueqing, Wang Zheng, Xu Zhixian, et al. Comprehensive diagnosis and tolerance strategies for electrical faults and sensor faults in dual three-phase PMSM drives[J]. IEEE Transactions on Power Elec- tronics, 2019, 34(7): 6669-6684.
[3] 谢颖, 胡圣明, 陈鹏, 等. 永磁同步电机匝间短路故障温度场分析[J]. 电工技术学报, 2022, 37(2): 322-331.
Xie Ying, Hu Shengming, Chen Peng, et al. Thermal field analysis on inter-turn short circuit fault of permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(2): 322-331.
[4] 陈勇, 梁洪, 王成栋, 等. 基于改进小波包变换和信号融合的永磁同步电机匝间短路故障检测[J]. 电工技术学报, 2020, 35(增刊1): 228-234.
Chen Yong, Liang Hong, Wang Chengdong, et al. Detection of stator inter-turn short-circuit fault in PMSM based on improved wavelet packet transform and signal fusion[J]. Transactions of China Elec- trotechnical Society, 2020, 35(S1): 228-234.
[5] Çira F, Arkan M, Gümüş B. A new approach to detect stator fault in permanent magnet synchronous motors[C]//2015 IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Elec- tronics and Drives (SDEMPED), Guarda, Portugal, 2015: 316-321.
[6] Romeral L, Urresty J C, Riba Ruiz J R, et al. Modeling of surface-mounted permanent magnet synchronous motors with stator winding interturn faults[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5): 1576-1585.
[7] 张业成, 刘国海, 陈前. 基于电流波动特征的永磁同步电机匝间短路与局部退磁故障分类诊断研究[J]. 电工技术学报, 2022, 37(7): 1634-1643, 1653.
Zhang Yecheng, Liu Guohai, Chen Qian. Dis- crimination of interturn short-circuit and local demagnetization in permanent magnet synchronous motor based on current fluctuation characteristics[J]. Transactions of China Electrotechnical Society, 2022, 37(7): 1634-1643, 1653.
[8] 阳同光, 桂卫华. 基于变频器网侧电流感应电机定子故障诊断[J]. 电机与控制学报, 2015, 19(12): 101-106.
Yang Tongguang, Gui Weihua. Stator fault diagnosis of induction motor based on network side current of converter[J]. Electric Machines and Control, 2015, 19(12): 101-106.
[9] 魏东, 刘侃, 丁荣军, 等. 基于多重同步压缩变换的永磁同步电机初期匝间短路故障检测[J]. 电工技术学报, 2022, 37(18): 4651-4663.
Wei Dong, Liu Kan, Ding Rongjun, et al. A multi- synchrosqueezing transformation based early stage detection of inter-turn short circuit fault in permanent magnet synchronous machine[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4651- 4663.
[10] 李睿彧, 刘飞, 梁霖, 等. 基于参数优化变分模态分解的交流变频电机转子断条故障识别方法[J]. 电工技术学报, 2021, 36(18): 3922-3933.
Li Ruiyu, Liu Fei, Liang Lin, et al. Fault identi- fication of broken rotor bars for the variable frequency AC motor based on parameter optimized variational mode decomposition[J]. Transactions of China Electrotechnical Society, 2021, 36(18): 3922- 3933.
[11] 宋向金, 王卓, 胡静涛, 等. Hilbert解调制方法诊断异步电机轴承故障[J]. 电工技术学报, 2018, 33(21): 4941-4948.
Song Xiangjin, Wang Zhuo, Hu Jingtao, et al. Diagnosis of bearing fault in induction motors using Hilbert demodulation approach[J]. Transactions of China Electrotechnical Society, 2018, 33(21): 4941- 4948.
[12] 蒋亦悦, 刘莺, 王玺帏, 等. 基于SDP和SURF特征提取的异步电机故障诊断方法[J]. 微电机, 2022, 55(9): 12-16, 99.
Jiang Yiyue, Liu Ying, Wang Xiwei, et al. A fault diagnosis method of asynchronous motor based on SDP and SURF feature extraction[J]. Micromotors, 2022, 55(9): 12-16, 99.
[13] 刘凯, 张炳义, 冯桂宏. 基于电枢齿偏移法双面转子永磁同步电机振动噪声特性的研究[J]. 电工技术学报, 2021, 36(增刊1): 95-106.
Liu Kai, Zhang Bingyi, Feng Guihong. Research on electromagnetic vibration and noise characteristics of dual sided rotor permanent magnet synchronous motor based on armature offset approach[J]. Transa- ctions of China Electrotechnical Society, 2021, 36(S1): 95-106.
[14] Kim K H. Simple online fault detecting scheme for short-circuited turn in a PMSM through current harmonic monitoring[J]. IEEE Transactions on Indu- strial Electronics, 2011, 58(6): 2565-2568.
[15] Tang Jing, Ding Xiaojian, Wang Yuanhang, et al. Condition monitoring of permanent magnet syn- chronous motor under different stator fault severity[C]//2021 Global Reliability and Prognostics and Health Management, Nanjing, China, 2021: 1-4.
[16] 吴方帮, 贺青川, 陈文华, 等. 一种永磁同步电机定子不对称故障检测方法[J]. 微电机, 2018, 51(6): 11-15.
Wu Fangbang, He Qingchuan, Chen Wenhua, et al. A method for detecting stator unsymmetrical fault of PMSM[J]. Micromotors, 2018, 51(6): 11-15.
[17] 李兵, 梁舒奇, 单万宁, 等. 基于改进正余弦算法优化堆叠降噪自动编码器的电机轴承故障诊断[J]. 电工技术学报, 2022, 37(16): 4084-4093.
Li Bing, Liang Shuqi, Shan Wanning, et al. Motor bearing fault diagnosis based on improved sine and cosine algorithm for stacked denoising auto- encoders[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4084-4093.
[18] Lu Siliang, Qian Gang, He Qingbo, et al. In situ motor fault diagnosis using enhanced convolutional neural network in an embedded system[J]. IEEE Sensors Journal, 2020, 20(15): 8287-8296.
[19] 杨战社, 孔晨再, 荣相, 等. 基于EEMD能量熵与ANN的矿用异步电机故障诊断[J]. 微电机, 2021, 54(8): 23-27, 61.
Yang Zhanshe, Kong Chenzai, Rong Xiang, et al. Fault diagnosis of mine asynchronous motor based on EEMD energy entropy and ANN[J]. Micromotors, 2021, 54(8): 23-27, 61.
[20] 禹杭, 高海波, 付博, 等. 基于PCA-RF的永磁电机故障诊断[J]. 应用科技, 2021, 48(6): 90-96.
Yu Hang, Gao Haibo, Fu Bo, et al. Fault diagnosis of permanent magnet motor based on PCA-RF[J]. Applied Science and Technology, 2021, 48(6): 90-96.
[21] Seera M, Lim C P, Ishak D, et al. Fault detection and diagnosis of induction motors using motor current signature analysis and a hybrid FMM-CART model[J]. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(1): 97-108.
[22] Chen Zhaodong, Deng Lei, Li Guoqi, et al. Effective and efficient batch normalization using a few uncorrelated data for statistics estimation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(1): 348-362.
[23] Lin Chengchuang, Zhao Gansen, Yang Zhirong, et al. CIR-net: automatic classification of human chromo- some based on inception-ResNet architecture[J]. IEEE/ACM Transactions on Computational Biology and Bioinformatics, 2022, 19(3): 1285-1293.
[24] 赵文祥, 刘桓, 陶涛, 等. 基于虚拟信号和高频脉振信号注入的无位置传感器内置式永磁同步电机MTPA控制[J]. 电工技术学报, 2021, 36(24): 5092- 5100.
Zhao Wenxiang, Liu Huan, Tao Tao, et al. MTPA control of sensorless IPMSM based on virtual signal and high-frequency pulsating signal injection[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5092-5100.
[25] 李峰, 夏超英. 考虑磁路饱和的IPMSM电感辨识算法及变参数MTPA控制策略[J]. 电工技术学报, 2017, 32(11): 136-144.
Li Feng, Xia Chaoying. Inductance identification algorithm and variable-parameters MTPA control strategy for IPMSM considering magnetic circuit saturation[J]. Transactions of China Electrotechnical Society, 2017, 32(11): 136-144.
[26] 付兴贺, 陈锐. 电机中ABC到dq0坐标变换的梳理与辨析[J]. 微特电机, 2021, 49(4): 1-8, 13.
Fu Xinghe, Chen Rui. Criticism and argument on coordinate transformation from ABC to dq0 in electric machine[J]. Small & Special Electrical Machines, 2021, 49(4): 1-8, 13.
[27] 宋战锋, 毛丰羽, 崔严谨, 等. 参考跟踪和扰动抑制解耦的双三相永磁同步电机容错控制策略[J]. 电工技术学报, 2023, 38(2): 435-450.
Song Zhanfeng, Mao Fengyu, Cui Yanjin, et al. An fault-tolerant control strategy based on decoupling between reference tracking and periodic disturbance attenuation for dual-three-phase permanent magnet synchronous machine[J]. Transactions of China Elec- trotechnical Society, 2023, 38(2): 435-450.
[28] 马文昌. 三相电机故障分析及诊断方法研究[J]. 防爆电机, 2021, 56(4): 61-63.
Ma Wenchang. Research on fault analysis and diagnosis method of three-phase motor[J]. Explosion- Proof Electric Machine, 2021, 56(4): 61-63.
[29] 叶鹏, 江思敏, 林海, 等. 基于复杂工况的直驱永磁同步电机应用研究[J]. 微电机, 2015, 48(12): 28-31, 39.
Ye Peng, Jiang Simin, Lin Hai, et al. Study on the application of direct drive PMSM based on com- plicated conditions[J]. Micromotors, 2015, 48(12): 28-31, 39.
[30] 赵志磊, 王雪妹, 刘冬冬, 等. 基于BP-ANN和PLS的近红外光谱无损检测李果实品质的研究[J]. 光谱学与光谱分析, 2022, 42(9): 2836-2842.
Zhao Zhilei, Wang Xuemei, Liu Dongdong, et al. Quantitative analysis of soluble solids and titratable acidity content in Angeleno plum by near-infrared spectroscopy with BP-ANN and PLS[J]. Spectroscopy and Spectral Analysis, 2022, 42(9): 2836-2842.
[31] 杨茁蓬, 高彦杰. 基于MODWT和ANN的微电网故障诊断[J]. 电力电子技术, 2022, 56(2): 19-22.
Yang Zhuopeng, Gao Yanjie. Fault diagnosis in microgrid based on MODWT and ANN network[J]. Power Electronics, 2022, 56(2): 19-22.
[32] Ioffe S, Szegedy C. Batch normalization: accelerating deep network training by reducing internal covariate shift[C]//2015 International Conference on Machine Learning, Lille, France, 2015.
[33] He Kaiming, Zhang Xiangyu, Ren Shaoqing, et al. Deep residual learning for image recognition[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 2016: 770-778.
Abstract Winding faults seriously affect the normal operation of permanent magnet synchronous motors. As one of the most widely used fault diagnosis methods, motor current signature analysis (MCSA) can effectively diagnose winding faults. However, its accuracy can be affected by complex operating conditions, sensor errors, and calculation errors. An online diagnosis method based on controller signals is proposed to ensure accurate fault diagnosis under complex working conditions without additional sensors.
Firstly, winding faults are analyzed mechanically, and the transmission of fault information among the controller signals is revealed. When a winding failure occurs in the motor, the third harmonic appears in the phase current. After the Clarke and Park transform, the third harmonic component appears in the current in the ab axis, making the second and fourth current harmonics appear in the dq axis. According to the dq-axis voltage- current equation and Park’s inverse transform, the dq-axis reference voltage has anomalous second and fourth harmonics, and the ab-axis reference voltage has anomalous third harmonic. Secondly, the fault features are extracted through an adaptive random window based on a fast Fourier transform (FFT). An analysis of fault characteristic distribution under single and complex working conditions reveals that some fault characteristics may fail under low-speed working conditions. Based on the artificial neural network (ANN), a deep optimization ANN is proposed. By the batch normalization (BN) algorithm, the deep network structure is residual to improve network generalization ability and diagnostic accuracy. Finally, a performance index of fault characteristics under complex working conditions is defined.
The experimental results show that when the motor operates at 500 r/min to 1 250 r/min and 20 N·m to 40 N·m, the fault feature under single operating conditions approximately meets the normal distribution. The fault feature stability (Sf) under complex working conditions is defined based on the distribution variance. By the 3s principle, this paper determines the distribution interval of fault features and defines the fault feature effectiveness (Ef) under complex working conditions according to class spacing. Moreover, the aliasing penalty factor is introduced to deepen the impact of aliasing. 13 fault features caused by the third harmonic of the three-phase current are taken as the object, and their Sf and Ef are calculated. When Sf is greater than 95% and Ef is greater than 0, the diagnostic accuracy is greater than 95%. Compared with three traditional diagnostic networks by random forest, the diagnostic accuracy of the deep optimization ANN is better, especially for the multi-fault comprehensive diagnosis of winding faults.
The following conclusions can be drawn. (1) During motor operation, fault features can fluctuate seriously, especially at low speeds. Some fault features may not be suitable for online fault diagnosis. (2) Before fault diagnosis, calculating Sf and Ef helps filter out less fluctuating fault features, ensuring the accuracy of online diagnosis. (3) If the fault features are subject to large fluctuations from external factors, the deep optimization ANN exhibits higher diagnostic accuracy and generalization ability than the traditional diagnostic networks.
keywords:Permanent magnet synchronous motor, winding fault, online fault diagnosis, feature extraction, deep optimization artificial neural network
DOI: 10.19595/j.cnki.1000-6753.tces.222044
中图分类号:TM307
国家自然科学基金资助项目(51991385)。
收稿日期 2022-10-28
改稿日期 2023-07-28
刘 蔚 男,1999年生,博士研究生,研究方向为电机故障诊断与容错控制。E-mail: 23B906061@stu.hit.edu.cn
王明峤 男,1994年生,助理教授,研究方向为可调磁通电机及其驱动控制、电机智能计算。E-mail: wangmingqiao@hit.edu.cn(通信作者)
(编辑 崔文静)