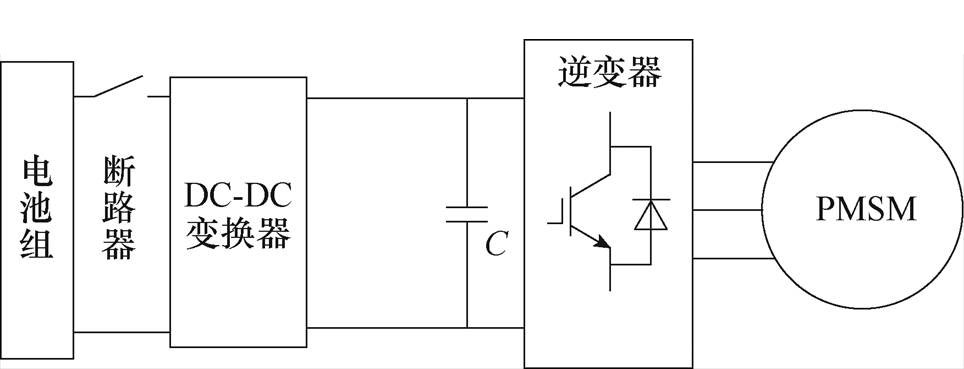
图1 电动汽车用PMSM驱动拓扑
Fig.1 PMSM drive topology for electric vehicles
摘要 针对电动汽车遇到碰撞等紧急情况时,高压驱动系统母线电容电压需迅速降到安全电压(60 V),而传统基于PI控制的母线电容主动放电方法存在鲁棒性差、放电时间长和安全性低的问题,提出一种计及总损耗功率的电动汽车母线电容快速放电方法。首先,建立以永磁同步电机绕组作为泄放电阻的母线电容能量流动模型,将逆变器损耗、电机绕组铜耗、电机电感储能等损耗作为总损耗,利用扩展滑模观测器(ESMO)对总损耗功率进行估算,并通过Lyapunov稳定性理论对ESMO的稳定性进行了证明。然后,将观测的总损耗功进行前馈补偿,从而使母线电压快速降低并稳定在安全电压。仿真和实验结果表明,与现有主动放电方法相比,所提放电方法不仅显著减小了放电时间,而且提高了快速放电的鲁棒性和安全性。
关键词:电动汽车 永磁同步电机 总损耗功率估计 扩展滑模观测器 母线电容放电
随着环境污染与能源危机不断加剧,电动汽车凭借其低碳环保、经济高效等优点受到国内外学者的广泛关注[1-5]。相较于其他电机,永磁同步电机(Permanent Magnet Synchronous Machine, PMSM)具有高功率密度、高效率和结构紧凑的优点,因此被广泛用作电动汽车主驱动电机[6-10]。为了提高电动汽车的续航里程和电池充电速度,电动汽车驱动系统电压等级逐渐提高,例如,Tesla Model 3、比亚迪汉和保时捷Taycan母线电压分别为350 V、570 V和800 V[11],较高的母线电压也对电动汽车安全提出了更高的要求,尤其是碰撞等紧急情况下的乘客人身安全[12]。
图1为常见电动汽车用PMSM驱动拓扑,整个驱动系统包括高压锂电池组、断路器、DC-DC变换器、薄膜母线电容、三相功率变换器和永磁同步电机。当电动汽车发生碰撞等紧急情况时,PMSM会脱离离合器,同时母线高压断路器也会迅速断开。但此时高速旋转的PMSM和母线电容上存储的电能仍然会使母线电压在较长一段时间内高于安全电压,使车内乘客和救援人员面临触电风险。为了避免电动汽车碰撞造成高压触电,提高电动汽车碰撞情况下的车辆安全,联合国车辆监管条规ECE R94要求电动汽车具备主动放电功能,并且要求母线电容电压需在5 s内降低至60 V及以下,避免对乘客造成二次电击伤害[13]。
图1 电动汽车用PMSM驱动拓扑
Fig.1 PMSM drive topology for electric vehicles
近年来,为了将母线电压降低到安全电压,国内外学者对电动汽车发生碰撞等紧急情况下的母线电容主动放电方法进行了大量研究,取得了一些成果。文献[14-15]通过在母线电容两端增加泄放电路,将母线电容储存的电能和永磁同步电机的动能以热能的形式消耗在泄放电阻上。虽然该方法可以快速将母线电压降低到安全电压,但需增加大功率开关和泄放电阻,增加了驱动系统体积和成本。而为了节约成本、减小泄放电路体积和质量,文献[16-19]提出了一种将驱动电机绕组作为泄放电阻的新方法,通过不同控制策略将电能以热能形式耗散在电机绕组上。其中,文献[16]采用在d轴施加弱磁电流,在q轴施加零电流的控制方法,通过快速降低电机反电动势的方式使母线电压快速下降,然而该方法在转速较高时会存在因触发过电流保护而导致的浪涌问题。针对小安全电流的情况,文献[17]提出了在q轴施加分段电流,同时在d轴注入大的弱磁电流,使放电功率小于制动功率,实现了该工况下母线电容能量的泄放。针对同样的工况,文献[18-19]提出一种基于绕组铜耗功率最大的母线电容放电方法,保持制动电磁功率始终小于绕组铜耗功率,获得实时dq轴电流轨迹,保证了该工况下最大电流给定,实现了小安全电流下的快速放电,但这两种方法在大转动惯量时放电时间会超过ECE R94放电时间要求。文献[20]提出了一种混合放电方法,在绕组放电功率最大的情况下,添加电阻作为辅助放电,实现了电阻体积和质量的优化,实现了电阻最小情况下的母线电容放电,减小了电阻的质量和体积,但依然需要添加泄放电路,且方法复杂、计算量大。然而,上述放电方法均不能在碰撞等紧急情况发生时快速将母线电压降低到安全电压,这会对紧急情况下的乘客安全和救援人员造成安全隐患。
在上述文献研究的基础上,本文提出了一种基于总损耗功率估计的母线电容主动快速放电方法。首先,分析了传统放电方法中母线电压和电机转速存在耦合的问题,母线电压受到转速影响导致母线电压在放电过程中会出现超调和浪涌现象,而且传统放电方法易受电机参数影响,鲁棒性差;其次,为了使母线电压快速降低到安全电压,建立了基于永磁同步电机绕组放电的能量流动模型,并分析了该模型下的能量流动过程;再次,通过能量模型发现母线电压具有非线性的特点,引入扩展滑模观测器(Extended Sliding Mode Observer, ESMO)对系统的总损耗功率进行估计,并进行前馈补偿,将母线电压快速稳定在安全电压,提高了系统的鲁棒性和放电的安全性。最后,通过仿真和实验验证了本文所提出的放电方法可以将母线电容电压快速降低到安全电压并稳定在安全电压,省去了复杂的泄放电路,缩短了放电时间。
基于永磁同步电机绕组的电动汽车母线电容放电拓扑如图2所示,主要包括永磁同步电机、双向功率变换器、母线电容。在母线电容放电过程中,永磁同步电机工作在发电机模式。
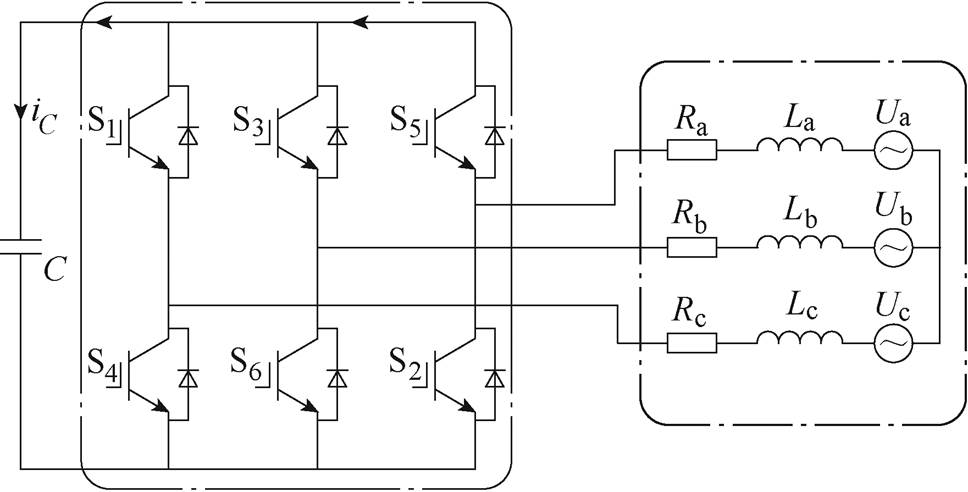
图2 基于PMSM绕组的放电拓扑
Fig.2 Discharge topology based on PMSM windings
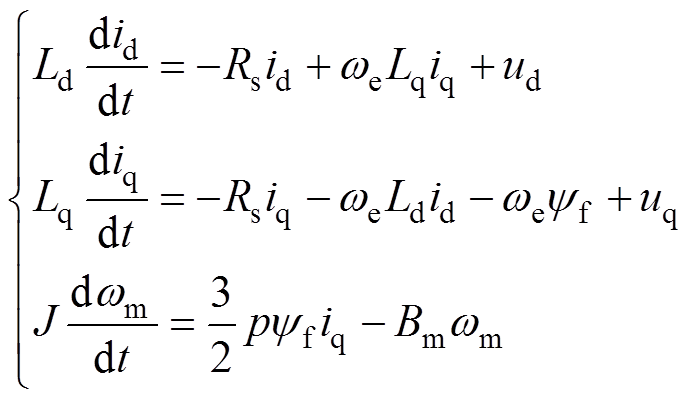
忽略永磁同步电机磁滞摩擦系数的影响,永磁同步电机在同步旋转坐标系下的电动机惯例数学模型[21-24]为
 (1)
(1)
式中,ud、uq分别为d、q轴电压;id、iq分别为d、q轴电流;Ld、Lq分别为d、q轴电感; 为永磁磁链;p为极对数;
为永磁磁链;p为极对数; 、
、 分别为机械角速度和电角速度;Rs、J分别为定子电阻和转动惯量;Bm为粘滞摩擦系数。
分别为机械角速度和电角速度;Rs、J分别为定子电阻和转动惯量;Bm为粘滞摩擦系数。
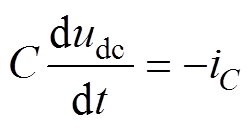
此时母线电容电流iC为
 (2)
(2)
式中,C为母线电容;udc为母线电压;负号是因为在图2中以流入电机的方向作为电流正方向。
由于电动汽车用PMSM脱离离合器高速旋转,因此反电动势远大于安全电压。为了快速将母线电压降低到安全电压,需要在d轴施加弱磁电流,将PMSM反电动势降低。
在忽略参数变化、电机绕组瞬态电感压降等影响的情况下,母线电压[19]可近似表示为
 (3)
(3)
式中,Von为二极管导通压降。
因此,当母线电压等于安全电压时,弱磁电流为
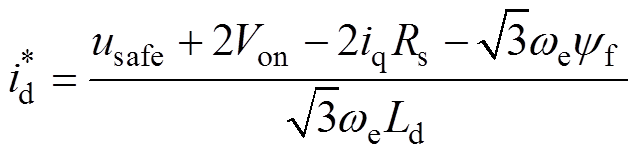 (4)
(4)
式中,usafe为安全电压。
通过在d轴施加给定弱磁电流,在q轴施加零电流,母线电压快速降低到60 V安全电压。此时,需要快速地将母线电压恒定在安全电压,传统控制中通常采用PI控制器将母线电压恒定在安全电压,直到转速不足以维持安全电压,此后母线电压跟随转速逐渐减小到0。
当母线电压降到安全电压时,传统基于PI控制器的母线电容放电方法启动,将母线电压稳定在安全电压。传统基于PI控制器的电动汽车母线电容放电算法如图3所示。采用电压外环电流内环的双PI控制器级联方式,实现对母线电压的控制。基于PI的电压外环控制器设计时,通常根据系统稳态工作点的线性小信号模型设计控制器,这使得控制器只适合稳态工作点变化不大的对象[25-26]。而母线电容放电过程中,转速大范围变化,永磁同步电机反电动势幅值和频率发生较大变化,导致稳态工作点发生较大漂移,造成传统PI控制器性能恶化,甚至造成系统不稳定,无法满足母线电压恒定在安全电压的需求[27]。而且母线电容放电过程中电机参数和转速测量可能存在误差,导致系统性能下降,因此需要研究转速大范围变化下的母线电容电压鲁棒控制算法。
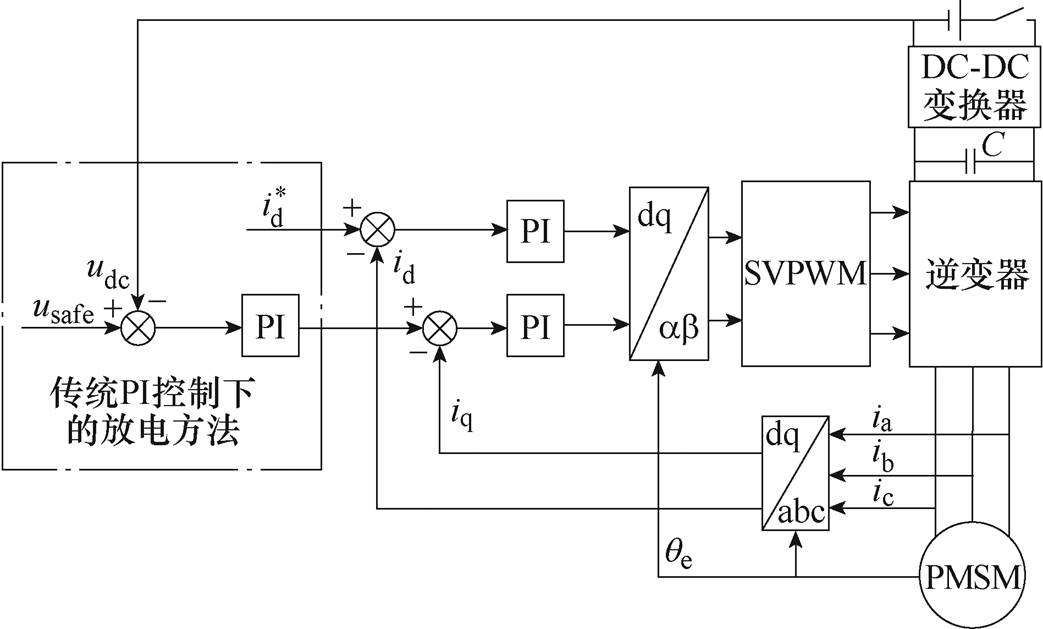
图3 基于传统PI控制器的母线电容放电方法框图
Fig.3 Block diagram of traditional bus capacitor discharge method based on PI controller
为了使母线电压快速下降后稳定在安全电压,解决传统PI控制器在母线电容放电过程中电机转速大范围变化时,母线电压无法满足高可靠性、高安全性放电要求的问题,本文提出了一种计及总损耗功率估计的母线电容放电方法。首先采用传统弱磁降压的方法在d轴施加负的给定电流,将PMSM反电动势降低到安全电压;当母线电压降低到安全电压时,通过ESMO对总损耗功率进行估算,并将估算的总损耗通过功率外环进行前馈补偿,从而将母线电压稳定在安全电压,实现母线电容的快速放电。
为了实现母线电容快速放电,避免放电过程中出现电压浪涌和振荡,在恒压阶段需要考虑逆变器损耗和永磁同步电机绕组损耗。由三相PWM变换器交直流两侧功率平衡得
 (5)
(5)
式中,Pcon为三相变换器损耗功率。
将式(1)ud、uq表达式代入式(5),得
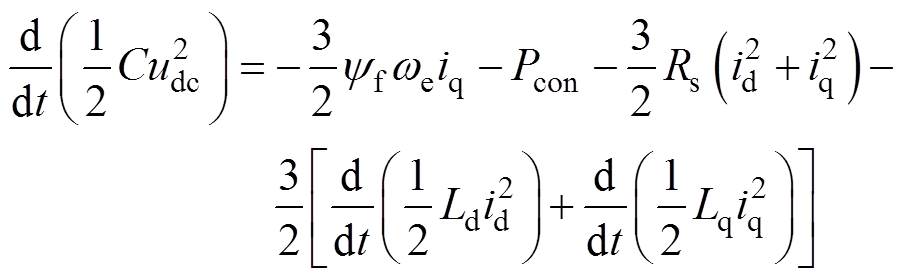 (6)
(6)
式中,右侧第一项是电磁功率,第二项是变换器损耗功率,第三项是电机绕组铜耗,第四项是电机电感储能。式(6)表明,永磁同步电机输出的电磁功率一部分转换为变流器损耗,一部分被绕组以热能消耗,还有一部分储存在电感线圈中,最后剩余功率才转换为电容上的能量。因此,当母线电压降低到安全电压时,可使右侧总的损耗功率等于电磁功率,从而实现将母线电压稳定在安全电压。
将永磁同步电机输出的电能转化为母线电容能量过程中产生的铜耗、功率变换器损耗、电感储能等作为系统的总扰动 ,则
,则

定义 ,电容能量
,电容能量 。
。
将总损耗功率作为一个新的状态变量,则扩展后的式(6)为
 (7)
(7)
由于电机参数和转速测量可能存在误差,而且系统参数会随电机工作状态而发生变化,因此 存在误差。为了提高系统在参数不匹配时的鲁棒性,重新建立一个鲁棒模型。定义
存在误差。为了提高系统在参数不匹配时的鲁棒性,重新建立一个鲁棒模型。定义 为
为 的测量值,
的测量值, 为的标称值,因此估算的写为
为的标称值,因此估算的写为 。
。
将总损耗功率和参数摄动引起的扰动重新定义为fP,即
扩展后的系统动态方程重新表述为
 (8)
(8)
为了抑制总的损耗功率对母线电压的影响,保证母线电压一直维持在安全电压,设计如下的ESMO对总损耗功率进行观测。
 (9)
(9)
式中, 为母线电容能量的估计值;
为母线电容能量的估计值; 为总损耗的估计值;
为总损耗的估计值; 为滑模控制律;
为滑模控制律; 为滑模增益。
为滑模增益。
由式(8)和式(9)得到系统误差方程为
 (10)
(10)
式中, 为母线电容能量的误差,
为母线电容能量的误差, ;
; 为总损耗功率的误差,
为总损耗功率的误差, 。
。
定义滑模面为
 (11)
(11)
为了提高观测的快速性和准确性,将趋近律设计[28]为
 (12)
(12)
式中, 和k均为大于零的趋近律参数;sign(s)为符号函数。
和k均为大于零的趋近律参数;sign(s)为符号函数。
联立式(10)和式(12)得
 (13)
(13)
由于e2为总损耗估计值的误差函数,因此,控制函数可以设计为
 (14)
(14)
因此,总的估计损耗功率为
 (15)
(15)
为了实现对总损耗功率和母线电容能量的准确估算,需要保证误差e1和e2快速收敛到0。
取李雅普诺夫函数为
 (16)
(16)
对V求导得
 (17)
(17)
将式(9)和式(12)代入式(16),得
 (18)
(18)
为了保证 ,则参数应该满足
,则参数应该满足
 (19)
(19)
因此,选择适当的观测器增益时,状态误差式(10)将在有限时间内收敛到零。从而ESMO可以快速到达滑模面并沿滑模面运动,实现对母线电容能量和总的损耗功率的准确快速跟踪,保证母线电压一直维持在安全电压以下。
为了快速降低母线电压,并维持在安全电压以下,需要对ESMO观测出的总损耗功率进行前馈补偿,而观测到的总损耗功率可以省去积分环节,因此控制律可设计为
 (20)
(20)
式中, 为q轴电流给定值;
为q轴电流给定值; 为母线电容能量给定值;
为母线电容能量给定值; 为功率外环的比例系数。将式(20)代入式(8)中得
为功率外环的比例系数。将式(20)代入式(8)中得
 (21)
(21)
当观测器收敛时,e2趋于0,总损耗功率的估计值对母线电容电压的影响得到有效抑制。但由于放电过程中,电机转速逐渐降低,因此母线电压仍然会受到转速的影响,为了实现母线电压和电机转速的解耦,改进的控制律设计为
 (22)
(22)
此时的系统闭环传递函数为
 (23)
(23)
与式(21)相比,本文所提控制策略中总损耗功率和电机转速的变化对母线电压的影响均得到了很好的抑制,实现了母线电压和电机转速的解耦。基于总损耗功率估计的母线电容放电方法的控制框图如图4所示,通过实时采集到的母线电压计算得到母线电容能量,然后和ESMO的估算值做差,再将ESMO估算的总损耗估计值通过功率外环进行前馈补偿,从而将母线电压维持在安全电压。
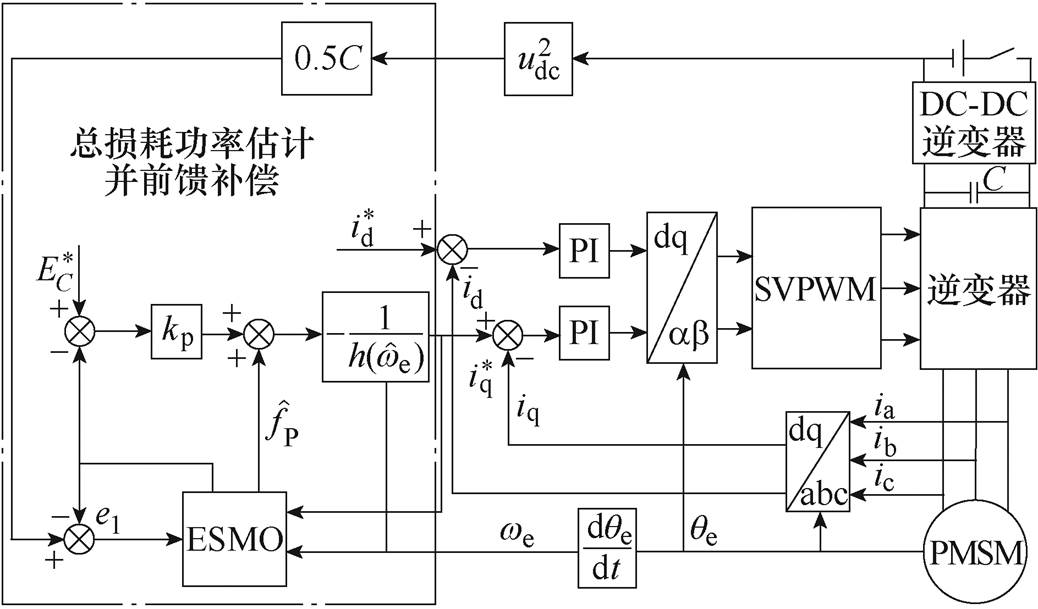
图4 计及总损耗功率的母线电容放电控制系统框图
Fig.4 Block diagram of busbar capacitor discharge control system with total power loss
为了验证本文所提放电方法的快速性和有效性,搭建了电动汽车用驱动系统模型并进行仿真验证,仿真中电机参数与实验中所用电机参数一致,见表1。为了评估所提方法与传统方法在母线电容快速主动放电方面的性能,定义母线电容放电时间为母线电容电压从电池电压开始降低并稳定在安全电压时的时间差。此外,系统的采样频率以及功率变流器的开关频率均设置为10 kHz,母线电压为310 V。
图5为基于传统PI控制器的母线电容放电过程仿真波形,从上到下依次是转速、母线电压、A相电流。由仿真结果可知,当系统收到放电请求后,离合器断开,电机转速不断下降,将电机动能转化为绕组热能。从图5可以看到,当母线电压快速降低到安全电压时,母线电压会在安全电压附近出现大幅振荡,振荡幅值最大为35 V,母线电压调整时间为0.5 s,这表明传统基于PI控制的母线电容放电方法不满足母线电压快速下降到安全电压并迅速稳定在安全电压的要求。
表1 SPMSM驱动系统参数
Tab.1 Parameters of the SPMSM drive system
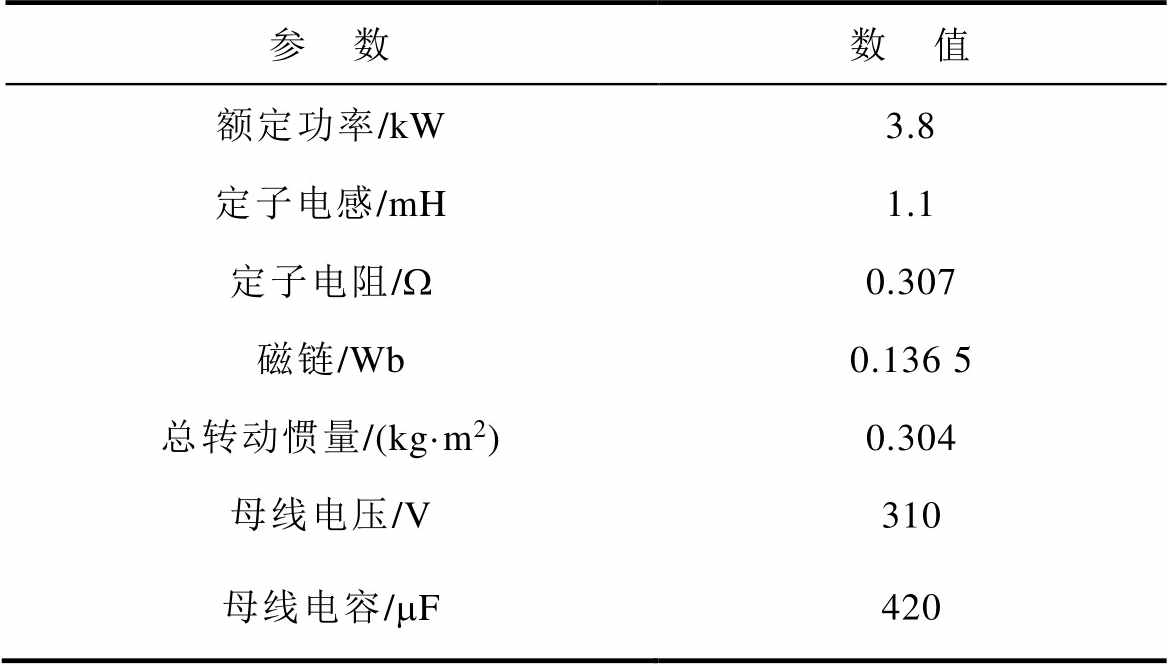
参 数数 值 额定功率/kW3.8 定子电感/mH1.1 定子电阻/W0.307 磁链/Wb0.136 5 总转动惯量/(kg·m2)0.304 母线电压/V310 母线电容/mF420
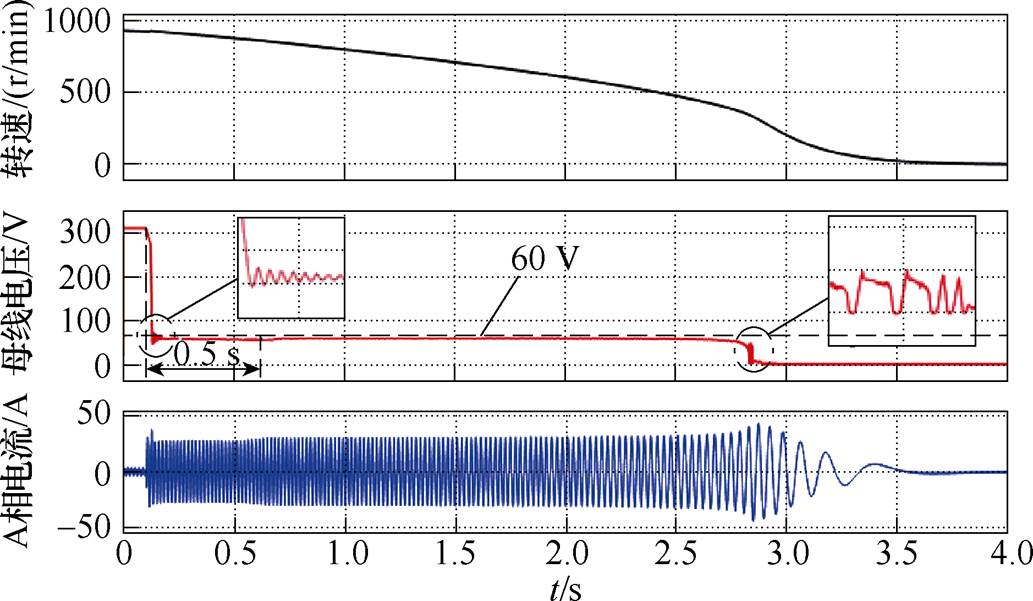
图5 基于传统PI的母线电容放电方法的仿真波形
Fig.5 Simulation waveforms of busbar capacitor discharge method based on traditional PI
图6为采用基于总损耗功率估计的母线电容快速放电方法时的仿真波形。从图6可以看出,系统收到放电要求时,通过在d轴注入给定弱磁电流,使母线电压快速下降到60 V的安全电压,并快速稳定在安全电压,直到转速不足以维持安全电压,母线电压降低到0,整个过程母线电压均没出现振荡。母线电压从310 V下降到安全电压用了0.1 s,相较于传统的PI控制的0.5 s,缩短了0.4 s。而且母线电压从安全电压降到0的时间也比传统PI控制用时减少了0.2 s。
图7为母线电容能量的估计值和实际值的仿真波形。仿真结果表明,当驱动系统电压为310 V电压时,母线电容能量为19.5 J,当电压下降到安全电压时,母线电容能量降到0.75 J,整个放电过程ESMO都可以很好地跟踪母线电容能量的变化过程,一直到母线电压降低到0,验证了本文所提方法的有效性。
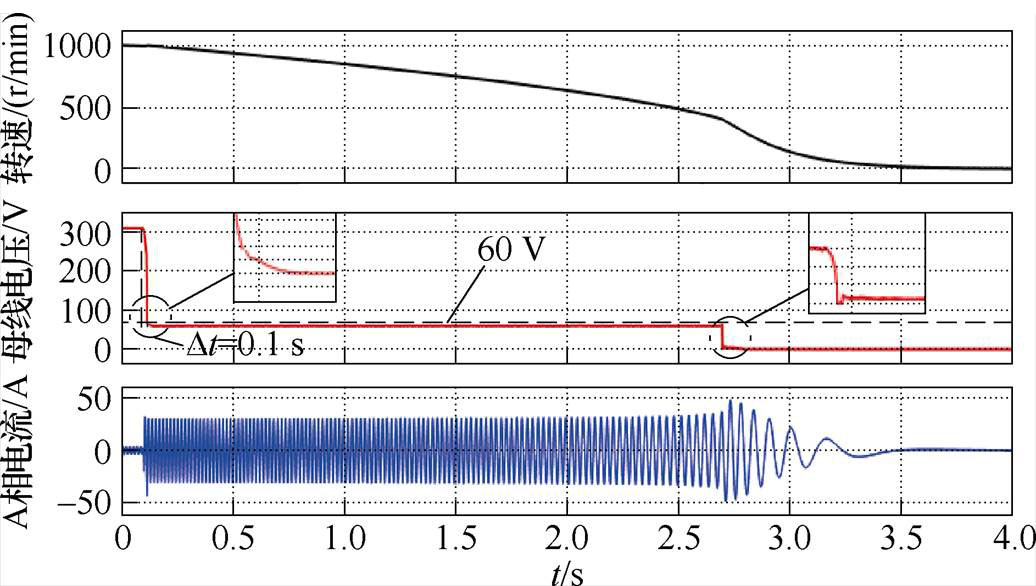
图6 计及总损耗功率的母线电容放电方法仿真波形
Fig.6 Simulation waveforms of busbar capacitor discharge method with total power loss
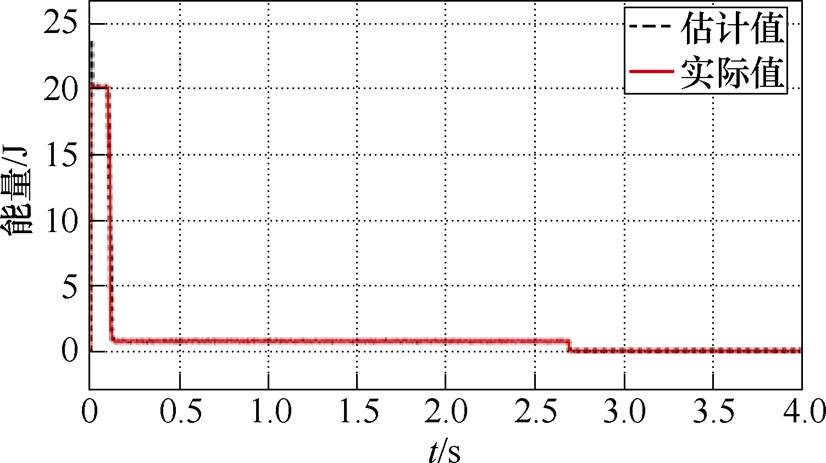
图7 基于ESMO的母线电容能量的估计值和实际值
Fig.7 Estimated and actual busbar capacitance energy based on ESMO
在如图8所示的电动汽车用永磁同步电机驱动系统实验平台上对所提母线电容快速放电方法的有效性和快速性进行实验验证。其中,控制器采用TI公司的TMS320F28335,功率变换器主电路功率模块采用英飞凌公司的FF450R12KT4。为了更好地模拟电动汽车驱动系统的运行情况,驱动系统直流侧母线电容采用420 mF的薄膜电容,并在电机前端同轴连接了一个惯性轮来提高系统转动惯量。实验结果均采用YOKOGAWA 示波器记录,实验中所使用的电机参数与仿真中(见表1)一致。为了更好地说明本文所提计及总损耗功率的母线电容放电方法的有效性和快速性,将其与基于PI控制的母线电容放电方法和基于扰动观测器(Disturbance Observer, DOB)的母线电压控制方法[29]进行了对比。
基于传统PI控制的母线电容放电法方法的实验结果如图9所示,电机初始转速为1 000 r/min。从图9可以看出,在收到放电指令后,d轴施加-30 A的给定弱磁电流,导致母线电压由于弱磁作用迅速下降到安全电压,然后在PI控制器的作用下稳定在安全电压附近,母线电压降到60 V,稳定在60 V的时间为1.2 s。但在电压下降到安全电压时母线电压出现了较大振荡,最大电压超过安全电压15 V,这对紧急情况下的乘客和救援人员造成安全隐患。比较图5和图9可以看到,实验时母线电容放电时间相较于仿真变长是由于仿真和实验中PI控制器参数设计时均采用文献[30]中零极点对消方法,而仿真是假设理想条件,因此母线电压稳定在安全电压时间短,而实际系统中电机参数存在偏差,导致控制器性能下降,造成电压振荡,从而时间有所延长。

图8 3.8 kW永磁同步电机驱动测试平台
Fig.8 3.8 kW PMSM drive test platform
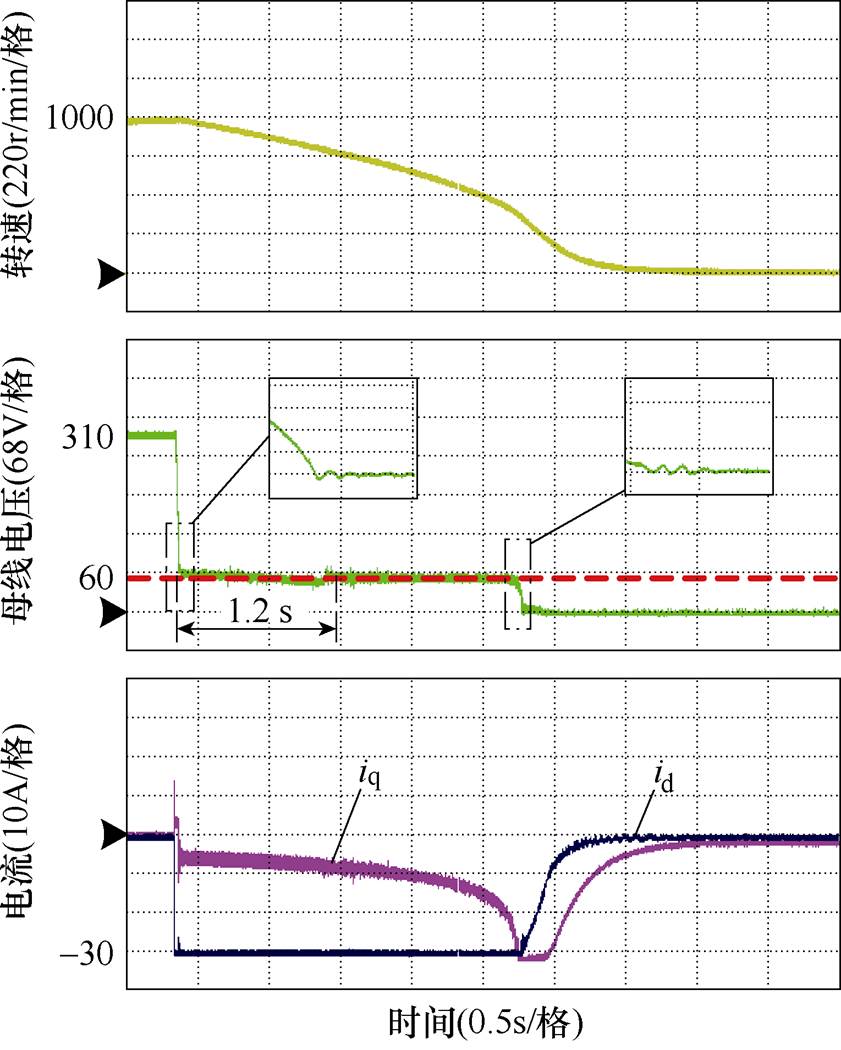
图9 基于传统PI的母线电容放电方法的实验结果
Fig.9 Experiment results of bus capacitor discharge based on traditional method
图10和图11分别为基于DOB的母线电容放电方法和本文所提计及总损耗功率估计的母线电容快速放电方法的实验波形。从图10和图11可以看出,q轴电流和转速负相关,随转速降低而减小,当q轴电流到达限值时,维持在最小电流直到母线电压降为0,然后dq轴电流又逐渐增大到0。由图10和图11的实验结果可知,母线电容放电所用时间比传统PI控制的母线电容放电时间分别减少了0.9 s和1 s,而且所提放电方法母线电压在整个放电过程中几乎无超调和浪涌。图11中的放电时间比仿真时间增加了0.1 s,这是由于采用所提放电方法时,母线电压放电时间增加了0.1 s,PI控制弱磁降压阶段时间相较于仿真增加,以及实际系统中参数和仿真参数存在偏差,导致扩展滑模观测器收敛时间增加,这两者共同导致实验时间增加了0.1 s。整个放电过程中,母线电压可以一直维持在安全电压直到转速降低到安全转速,实现了母线电容的快速放电。比较图10和图11可以发现,所提放电方法相比基于DOB的母线电容放电方法,其母线电容放电时间少0.1 s,这是由于该方法所用DOB观测器为线性观测器,而ESMO为非线性观测器,由文献[31]可知,非线性观测器的收敛速度要快于线性观测器,因此动态性更好,母线电压稳定在安全电压的时间也更短。而图11中q轴电流的纹波比图10中q轴电流纹波大,这是由于ESMO的输出是电流内环控制器的参考值,而滑模观测器的输出抖振会导致电流内环产生谐波,因此图11的q轴电流的纹波要大于图10中q轴电流纹波。从图9~图11可以看到,在d轴施加给定弱磁电流时,q轴电流出现了较大的尖峰,这是由于dq轴电流交叉耦合导致的[32]。整个过程中dq轴电流都能很好地跟踪给定电流,实现了母线电压快速降低到安全电压。而且,所提放电方法比传统基于PI控制的放电方法和基于DOB的母线电容放电方法的放电时间均更短。
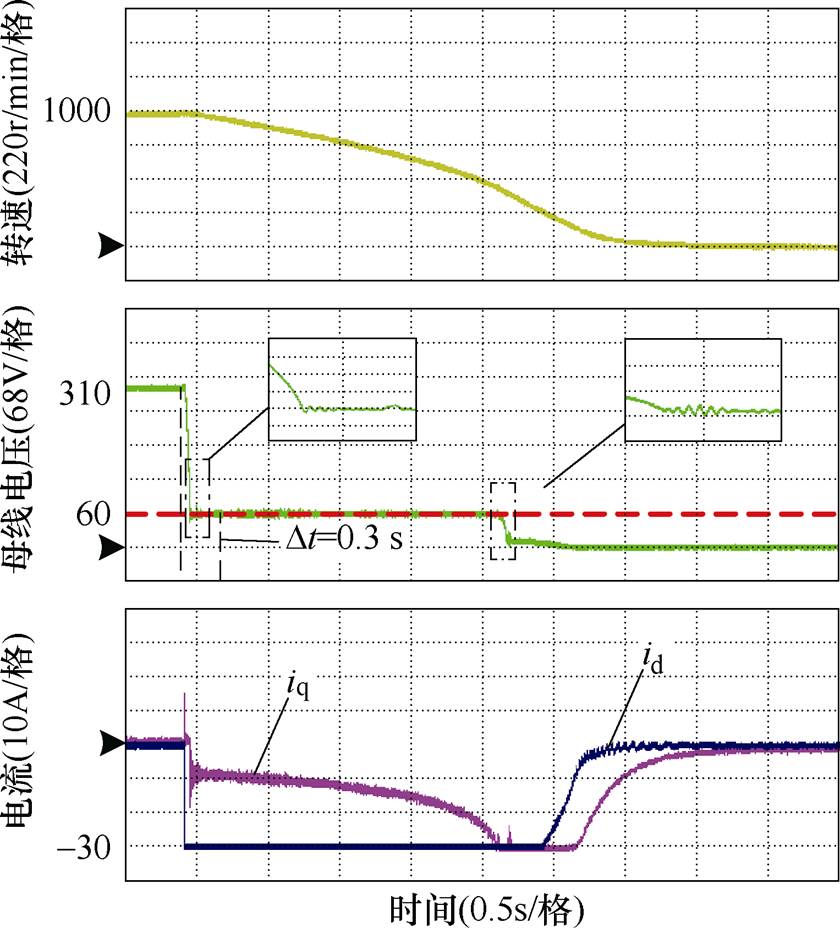
图10 基于DOB的母线电容放电实验结果
Fig.10 Experimental results of DC-bus capacitor discharge based on DOB
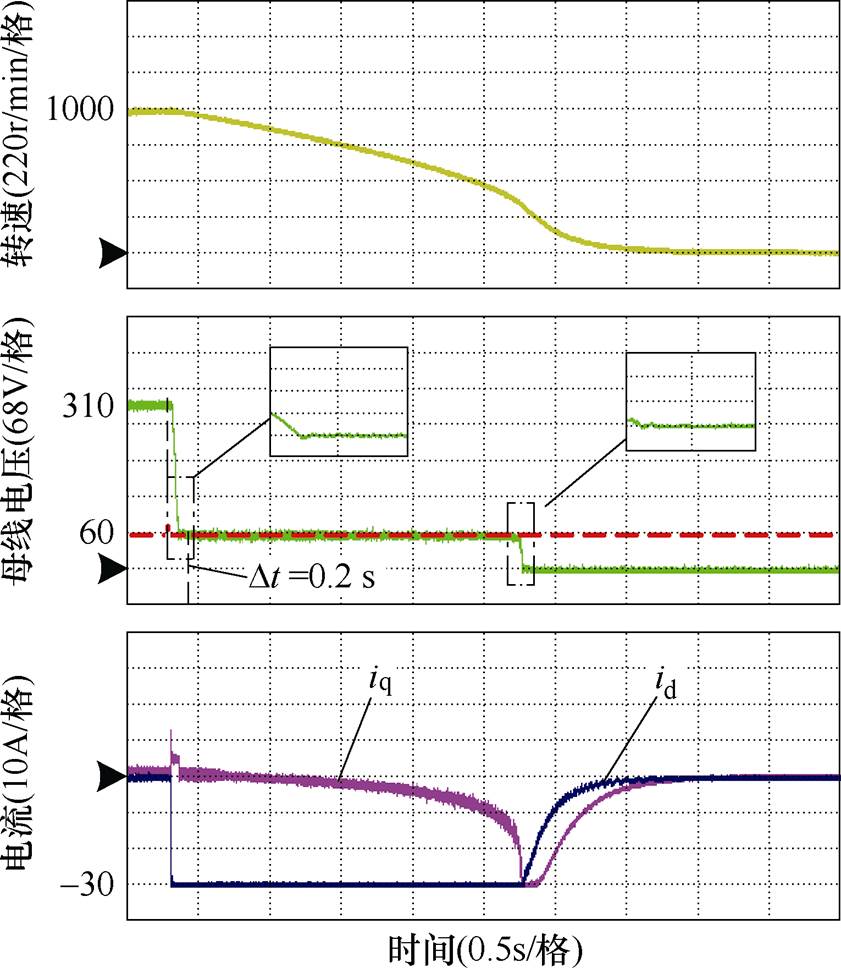
图11 计及总损耗功率估计方法的实验结果
Fig.11 Experimental results based on total loss power estimation method
为了更好地说明本文所提方法对参数摄动具有较强的鲁棒性,将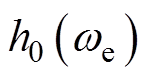 分别设置±20%误差,之所以设置参数误差是由于其他参数误差均已经包括在总损耗fP中,因此系统此时只有可能存在误差。所得实验结果如图12所示,图中依次为母线电压、估计的总损耗功率。可以看出,三种情况下,母线电容能量估计值和实际值误差均为0,证明ESMO可以很好地估算母线电容能量,实现了对真实值的准确跟踪。从图12a~图12c可以发现,随着误差的增大,估计的总的损耗功率也在逐渐增大,这是由于误差增大时,参数的误差会被在损耗中很好地估计,因此损耗功率会跟随误差而变化,而且变化趋势也证明了本方法的正确性。而且整个过程中,母线电压均快速下降并稳定在安全电压,验证了本方法具有较强的鲁棒性。
分别设置±20%误差,之所以设置参数误差是由于其他参数误差均已经包括在总损耗fP中,因此系统此时只有可能存在误差。所得实验结果如图12所示,图中依次为母线电压、估计的总损耗功率。可以看出,三种情况下,母线电容能量估计值和实际值误差均为0,证明ESMO可以很好地估算母线电容能量,实现了对真实值的准确跟踪。从图12a~图12c可以发现,随着误差的增大,估计的总的损耗功率也在逐渐增大,这是由于误差增大时,参数的误差会被在损耗中很好地估计,因此损耗功率会跟随误差而变化,而且变化趋势也证明了本方法的正确性。而且整个过程中,母线电压均快速下降并稳定在安全电压,验证了本方法具有较强的鲁棒性。
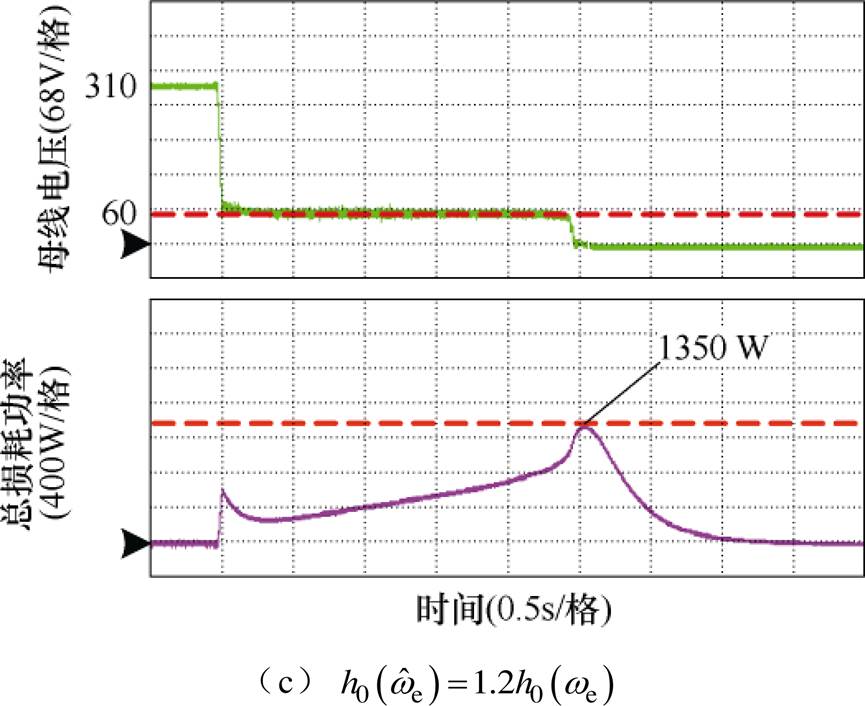
图12 参数变化时的鲁棒实验波形
Fig.12 Robust experimental waveforms with parameter changes
表2比较了传统PI放电方法、基于DOB的母线电容放电方法和本文所提计及总损耗功率估计的母线电容放电方法。从表2中可以看出,本文所提放电方法达到安全电压时间以及总放电时间都最短,证明本文所提方法可以加快放电过程。而且采用本文所提放电方法时,在母线电压降低到安全电压后,母线电压几乎无超过安全电压的情况,说明了本文所提方法的安全性也更高。
表2 不同放电方法实验结果对比
Tab.2 Comparison of experimental results of different discharge methods

放电方法降到60 V耗时/s电压超调/V总放电时间/s鲁棒性安全性 传统PI1.2122.45弱低 基于DOB的方法0.332.3强高 本文所提方法0.20.52.25强高
综上所述,仿真和实验结果证明了本文所提方法的有效性,而且所提母线电容放电方法对参数摄动具有很强的鲁棒性,相较于传统PI控制的母线电容放电方法和基于DOB的母线电容放电方法放电时间最短。由于省去了复杂的泄放电路,因而进一步提高了电动汽车驱动系统的功率密度和可靠性。
本文研究了一种电动汽车高压驱动系统母线电容主动快速放电方法。该方法无需复杂的泄放电路便可实现母线电容的快速放电,提高了电动汽车驱动系统的可靠性和使用寿命。所提出的计及总损耗功率估计的母线电容主动快速放电方法和现有母线电容主动快速放电方法相比,具有对参数不敏感、放电时间短等优点,得到如下结论:
1)建立了快速弱磁降压阶段数学模型,获得了降低到安全电压时的d轴电流,并分析了传统基于PI控制器的放电方法存在稳态工作点随电机转速变化的问题,无法满足紧急情况下的母线电容快速、安全放电要求。
2)建立以PMSM绕组为泄放电阻的放电模型,推导母线电容电压和系统总损耗功率间的关系,提出采用ESMO对系统总损耗进行观测并进行前馈补偿的控制策略,有效抑制母线电压降低到安全电压时的电压脉动,缩短了放电时间,提高了系统的鲁棒性和安全性。
3)仿真和实验结果都证明本文所提的计及总损耗功率估计的电动汽车母线电容放电控制方法具有鲁棒性强和安全性高的优点,具有很强的实用性和工程应用价值。
参考文献
[1] 蒋栋, 高加楼, 李柏杨, 等. 电动汽车电机驱动系统零转矩充电复用技术简介[J]. 电工技术学报, 2022, 37(19): 4862-4871.
Jiang Dong, Gao Jialou, Li Boyang, et al. Introduction of integrated motor drive-charger technologies for electric vehicle with zero torque[J]. Transactions of China Electrotechnical Society, 2022, 37(19): 4862- 4871.
[2] 刘洪, 阎峻, 葛少云, 等. 考虑多车交互影响的电动汽车与快充站动态响应[J]. 中国电机工程学报, 2020, 40(20): 6455-6468.
Liu Hong, Yan Jun, Ge Shaoyun, et al. Dynamic response of electric vehicle and fast charging stations considering multi-vehicle interaction[J]. Proceedings of the CSEE, 2020, 40(20): 6455-6468.
[3] Wang Wei, Chen Xinbo, Wang Junmin. Motor/ generator applications in electrified vehicle chassis-a survey[J]. IEEE Transactions on Transportation Electrification, 2019, 5(3): 584-601.
[4] 佟明昊, 程明, 许芷源, 等. 电动汽车用车载集成式充电系统若干关键技术问题及解决方案[J]. 电工技术学报, 2021, 36(24): 5125-5142.
Tong Minghao, Cheng Ming, Xu Zhiyuan, et al. Key issues and solutions of integrated on-board chargers for electric vehicles[J]. Transactions of China Elec- trotechnical Society, 2021, 36(24): 5125-5142.
[5] 张维煜, 杨恒坤, 朱熀秋. 电动汽车用飞轮电池关键技术和技术瓶颈分析[J]. 中国电机工程学报, 2018, 38(18): 5568-5581.
Zhang Weiyu, Yang Hengkun, Zhu Huangqiu. Key technologies and technical bottleneck analysis of flywheel battery systems for electric vehicle[J]. Proceedings of the CSEE, 2018, 38(18): 5568- 5581.
[6] 陈卓易, 屈稳太. 基于PID型代价函数的永磁同步电机模型预测电流控制[J]. 电工技术学报, 2021, 36(14): 2971-2978.
Chen Zhuoyi, Qu Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971- 2978.
[7] 秦艳忠, 阎彦, 陈炜, 等. 永磁同步电机参数误差补偿-三矢量模型预测电流控制[J]. 电工技术学报, 2020, 35(2): 255-265.
Qin Yanzhong, Yan Yan, Chen Wei, et al. Three-vector model predictive current control strategy for permanent magnet synchronous motor drives with parameter error compensation[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 255- 265.
[8] 杨淑英, 储昭晗, 房佳禹, 等. 直接基于谐波电动势定向的PMSM转矩脉动抑制方案研究[J]. 电机与控制学报, 2022, 26(7): 68-80.
Yang Shuying, Chu Zhaohan, Fang Jiayu, et al. Suppression strategy of PMSM torque ripples directly based on harmonic EMF orientation[J]. Electric Machines and Control, 2022, 26(7): 68-80.
[9] Wang Qiwei, Wang Gaolin, Zhao Nannan, et al. An impedance model-based multiparameter identification method of PMSM for both offline and online con- ditions[J]. IEEE Transactions on Power Electronics, 2021, 36(1): 727-738.
[10] 章回炫, 范涛, 边元均, 等. 永磁同步电机高性能电流预测控制[J]. 电工技术学报, 2022, 37(17): 4335-4345.
Zhang Huixuan, Fan Tao, Bian Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335-4345.
[11] Gong Chao, Hu Yihua, Gao Jinqiu, et al. Winding- based DC-bus capacitor discharge technique selection principles based on parametric analysis for EV- PMSM drives in post-crash conditions[J]. IEEE Transactions on Power Electronics, 2021, 36(3): 3551-3562.
[12] 周军, 朱博楠, 杨圣强, 等. 基于动态差值法的直流系统绝缘监测技术[J]. 电工技术学报, 2015, 30(1): 235-241.
Zhou Jun, Zhu Bonan, Yang Shengqiang, et al. Dynamic difference value method for insulation monitoring in DC system[J]. Transactions of China Electrotechnical Society, 2015, 30(1): 235-241.
[13] Gong Chao, Liu Jinglin, Han Yaofei, et al. Safety of electric vehicles in crash conditions: a review of hazards to occupants, regulatory activities, and tech- nical support[J]. IEEE Transactions on Transportation Electrification, 2022, 8(3): 3870-3883.
[14] 韩利, 姚宏, 夏燕兰. 基于最大功率的VSI泄放电阻制动技术及应用[J]. 电力电子技术, 2012, 46(8): 83-85.
Han Li, Yao Hong, Xia Yanlan. A new braking control method for VSI based on maximal allowable braking resistance discharge power[J]. Power Elec- tronics, 2012, 46(8): 83-85.
[15] Meyer I J W, Tasky D P, Nayeem S M, et al. Passive high-voltage DC bus discharge circuit for a vehicle: U.S. 9018865.B2[P]. 2015-4-28.
[16] Ashida S, Yamada K, Nakamura M, et al. Electric vehicle and control apparatus in the event of frontal collision. circuit compliant power generation systems using induction machine: U.S. Patent 8631894.B2[P]. 2014-1-21.
[17] Gong Chao, Hu Yihua, Chen Guipeng, et al. A DC- bus capacitor discharge strategy for PMSM drive system with large inertia and small system safe current in EVs[J]. IEEE Transactions on Industrial Informatics, 2019, 15(8): 4709-4718.
[18] Yang Haolin, Yang Jiaqiang, Zhang Xiaojun. DC-bus capacitor maximum power discharge strategy for EV-PMSM drive system with small safe current[J]. IEEE Access, 2021, 9: 132158-132167.
[19] 张晓军, 杨家强, 杨昊林. 一种基于永磁同步电机绕组铜耗功率最大的电动汽车母线电容放电方法[J]. 中国电机工程学报, 2022, 42(17): 6460- 6471.
Zhang Xiaojun, Yang Jiaqiang, Yang Haolin. A DC- bus capacitor discharge method based on maximum copper consumption power of permanent magnet synchronous motor windings in electric vehicles[J]. Proceedings of the CSEE, 2022, 42(17): 6460- 6471.
[20] Gong Chao, Hu Yihua, Li Wenzhen, et al. Hybrid DC-bus capacitor discharge strategy using internal windings and external bleeder for surface-mounted PMSM-based EV powertrains in emergency[J]. IEEE Transactions on Industrial Electronics, 2021, 68(3): 1905-1915.
[21] 鲍晓华, 刘佶炜, 孙跃, 等. 低速大转矩永磁直驱电机研究综述与展望[J]. 电工技术学报, 2019, 34(6): 1148-1160.
Bao Xiaohua, Liu Jiwei, Sun Yue, et al. Review and prospect of low-speed high-torque permanent magnet machines[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1148-1160.
[22] 刘宁, 夏长亮, 周湛清, 等. 基于比例增益补偿的永磁同步电机转速平滑控制[J]. 电工技术学报, 2018, 33(17): 4007-4015.
Liu Ning, Xia Changliang, Zhou Zhanqing, et al. Smooth speed control for permanent magnet synchronous motor using proportional gain com- pensation[J]. Transactions of China Electrotechnical Society, 2018, 33(17): 4007-4015.
[23] 张国强, 王高林, 徐殿国, 等. 基于单观测器误差信息融合的永磁电机无传感器复合控制策略[J]. 中国电机工程学报, 2017, 37(20): 6077-6082.
Zhang Guoqiang, Wang Gaolin, Xu Dianguo, et al. Hybrid sensorless control based on single position observer using error combination for interior per- manent magnet synchronous machine drives[J]. Proceedings of the CSEE, 2017, 37(20): 6077-6082.
[24] 刘旭东, 李珂, 张奇, 等. 基于非线性扰动观测器的永磁同步电机单环预测控制[J]. 中国电机工程学报, 2018, 38(7): 2153-2162, 2230.
Liu Xudong, Li Ke, Zhang Qi, et al. Single-loop predictive control of PMSM based on nonlinear disturbance observers[J]. Proceedings of the CSEE, 2018, 38(7): 2153-2162, 2230.
[25] Jung J, Lim S, Nam K. A feedback linearizing control scheme for a PWM converter-inverter having a very small DC-link capacitor[J]. IEEE Transactions on Industry Applications, 1999, 35(5): 1124-1131.
[26] Zhang Xiang, Yang Jiaqiang. A robust flywheel energy storage system discharge strategy for wide speed range operation[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 7862-7873.
[27] 巩磊, 王萌, 祝长生. 基于浸入不变流形的飞轮储能系统母线电压自适应非线性控制器[J]. 中国电机工程学报, 2020, 40(2): 623-634.
Gong Lei, Wang Meng, Zhu Changsheng. An adaptive nonlinear controller for the bus voltage based on immersion and invariance manifold in flywheel energy storage systems[J]. Proceedings of the CSEE, 2020, 40(2): 623-634.
[28] Zhang Xiaoguang, Hou Benshuai, Mei Yang. Deadbeat predictive current control of permanent- magnet synchronous motors with stator current and disturbance observer[J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3818-3834.
[29] Ali M, Yaqoob M, Cao Lingling, et al. Disturbance- observer-based DC-bus voltage control for ripple mitigation and improved dynamic response in two- stage single-phase inverter system[J]. IEEE Transa- ctions on Industrial Electronics, 2019, 66(9): 6836- 6845.
[30] Zhou Sizhan, Liu Jinjun, Zhou Linyuan, et al. DQ current control of voltage source converters with a decoupling method based on preprocessed reference current feed-forward[J]. IEEE Transactions on Power Electronics, 2017, 32(11): 8904-8921.
[31] Han Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[32] Rabiei A, Thiringer T, Alatalo M, et al. Improved maximum-torque-per-ampere algorithm accounting for core saturation, cross-coupling effect, and temperature for a PMSM intended for vehicular applications[J]. IEEE Transactions on Transportation Electrification, 2016, 2(2): 150-159.
Abstract When electric vehicles (EVs) encounter an emergency, the dc-bus voltage of EVs equipped with the high-voltage drive system needs to be reduced to safe voltage (60 V) as soon as possible. To drop the dc-bus capacitor voltage to a safe voltage, a winding-based active discharge method was proposed. However, traditional active discharge based on PI controller has poor robustness, long discharge time, and low safety, which cannot meet the discharge requirements of the United Nation Vehicle Regulation ECCE R94. This paper proposes an active discharge method for EVs with total power loss to reduce the discharge time and enhance the robustness.
Firstly, the d-axis weakened current is calculated using the permanent magnet synchronous motor winding as the bleeding resistor. Then, the traditional active discharge method based on the PI controller is analyzed. Secondly, the dc-bus capacitor energy flow model is established. More importantly, the extended sliding mode observer (ESMO) is introduced to address long discharge time and poor robustness issues. The ESMO can observe the total loss, which consists of inverter loss, motor winding copper consumption, motor inductance energy storage, and other losses. The stability of ESMO is proved by the Lyapunov stability theory. Finally, observed total discharge loss can be feedforward compensated by the designed control law. Compared with the conventional discharge method, the influence of total power loss and motor speed on the dc-bus capacitor voltage is well suppressed, and the dc-bus capacitor voltage and motor speed are decoupled in the proposed strategy.
Experimental results show that the DC-bus voltage of the proposed method drops to a safe voltage within 0.2 s, faster than traditional active discharge method-based PI controller (1.2 s) and disturbance observer (0.3 s). In contrast, the discharge time is shorter with the active discharge method-based disturbance observer because the convergence rate is faster than the disturbance observer. The experiment with parameter mismatch proves that the parameter error can be observed and compensated by the ESMO. Furthermore, electric vehicle drive systems' power density and reliability are further improved by eliminating the complicated drain circuit.
The following conclusions can be obtained: (1) The traditional discharge method-based PI controller has the problem of changing the steady-state operating point with the motor speed, which could not meet the requirements of fast and safe discharge of the dc-bus capacitor in emergencies. (2) The discharge model with PMSM winding as the bleeding resistor is established, and the relationship between the dc-bus capacitor voltage and the total power loss of the system is deduced. Moreover, the observed total loss of the system can be feedforward compensated in the proposed discharge method, effectively suppressing the voltage pulsation when the dc-bus voltage reduces to the safe voltage. Hence, the discharge time is short, and the robustness and safety of the system are improved. (3) The simulation and experimental results show that the proposed control method for electric vehicles with total power loss estimation has strong robustness, high safety, strong practicability, and engineering application value.
keywords:Electric vehicle, permanent magnet synchronous motor (PMSM), estimated total power loss, extended sliding mode observer, DC-bus capacitor discharge
DOI: 10.19595/j.cnki.1000-6753.tces.222284
中图分类号:TM351
浙江省自然科学基金重点基金资助项目(LCZ19E070001)。
收稿日期 2022-12-12
改稿日期 2023-04-06
张晓军 男,1991年生,博士,讲师,研究方向为永磁同步电机驱动系统及其控制。E-mail: eezxj1991@126.com
杨家强 男,1970年生,教授,博士生导师,研究方向为电机系统及其控制。E-mail: yjq1998@163.com(通信作者)
(编辑 崔文静)