图1 无刷直流电机及其典型逆变电路结构
Fig.1 BLDCM and its typical inverter circuit structure
摘要 无刷直流电机固有的转矩脉动问题严重限制了其在诸多高精尖场合的应用,为此该文提出一种适用于宽速度范围转矩脉动抑制的回馈升压逆变器拓扑及控制策略。在正常导通期间通过保持非换相相电流的恒定以减小转矩脉动。当电机运行在低速区间时,由于换相时所需的母线电压小于直流侧电源电压,因此通过脉宽调制便足以实现电机的平滑换相;而在更高速的情况下为实现快速换相并有效抑制换相转矩脉动,可在换相期间利用所提拓扑提升母线电压,其中额外补偿的能量均来自非换相期间电机的回馈。最后通过相应的Matlab仿真和DSP驱动实验验证了所提控制技术的可行性和有效性。
关键词:无刷直流电机 转矩脉动 回馈升压 宽速度范围
无刷直流电机(Brushless DC Motor, BLDCM)因具有高功率密度、高效率、结构简单和体积小等优点,而备受航空航天、工业自动化以及家用电器等领域的青睐[1-3]。在120°导通方式下BLDCM固有的转矩脉动限制了其在高稳定性、高精度等场合的应用,其中由电流换相引起的转矩脉动最大,最高可达平均转矩的50%[4]。因此,换相转矩脉动的抑制对提高BLDCM整体性能而言具有重要意义[5-6]。
国内外诸多学者从调制方式、直接转矩控制、控制电路拓扑等多个角度对换相转矩脉动抑制进行了大量研究。文献[7]以非换相期间的占空比为基准对换相期间占空比进行修改从而实现对非换相相电流的跌落进行补偿。然而由于直流侧母线电压的限制,上述方法并不适用于低于额定转速的高速区间,为此诸多学者考虑实现宽速度范围的换相转矩脉动抑制。文献[8]引入正比于瞬时转矩的合成电流变量并得到其与非换相相电流之间的关系,通过控制相应的非换相相电流进而实现对瞬时转矩的间接控制。文献[9]在两相静止坐标系下对转矩脉动进行分析,并在续流阶段注入特定的电压矢量以解决换相转矩脉动问题。文献[10]利用积分变结构控制(Inte- gral Variable Structure Control, IVSC)根据反电动势波形对两相导通和换相模式下的电流进行优化控制。文献[11]利用坐标变换理论对换相过程进行分析,并通过图解法得到转矩脉动抑制前提下的最短换相时间。
除此之外,一些学者在直接转矩控制方案上也取得了一定成果。文献[12]提出滞环控制与PWM控制相结合的转矩控制方法,有效降低了因低电感造成的电流和输出转矩的脉动。文献[13]在换相期间引入三相导通模式,通过换相期间采用混合两相与三相的切换模式来实现宽速度范围的转矩脉动抑制。文献[14]分别建立针对转矩增大和减小的主、辅矢量,并在换相期间选择统一的矢量。上述方法虽然能够实现宽速度范围的转矩脉动抑制,但是受限于直流侧母线电压,在低于额定转速的高速区间均是通过延长关断相相电流的下降时间来实现,这无疑增加了不必要的换相时间。
为此,一些学者提出利用添加在逆变器前级的DC-DC变换器来调节直流侧母线电压,使得无刷直流电机在换相期间与非换相期间可采用不同的直流侧母线电压,从而减小换相期间电流的变化率以抑制换相转矩脉动。文献[15]使用准Z源网络作为升压拓扑能够提供抑制换相转矩脉动所需的母线电压。然而,该拓扑需要一个开关管、两个储能电感和三个储能电容,且两个储能电容的工作电压以及开关管的电压应力都比电源电压高。文献[16-17]分别使用Cuk变换器和单端初级电感变换器(Single Ended Primary Inductor Converter, SEPIC)作为升压拓扑,二者相比于文献[15]少用了一个储能电容,减小了系统的体积,但同时增加了开关管的电压应力,随之提高了系统的成本。此外,为了在高速换相期间将上述拓扑接入直流母线,皆需由两个开关管组成的选择电路,进一步增加了系统的成本。对此,文献[18]仅使用单个开关管,通过储能电容与电源串联的方式,即可在高速换相期间提升母线电压,降低系统的成本,但其仍需额外的开关管和反激变压器给储能电容充电。文献[19]则直接省掉了高速换相期间把升压拓扑接入直流母线的选择电路,通过切换H桥逆变电路调制方式来分别满足在换相期间和非换相期间抑制转矩脉动的不同需求,但由于该拓扑的直流母线电压在两个不同值之间交替,且其较大值要远大于非换相期间抑制转矩脉动所需电压,使得电流纹波与未接入升压拓扑时相比大很多。同时,其使用的两个储能电容持续为电机供电,故所需电容容量较大,增加了系统的体积。此外,上述文献所提拓扑都需要使用储能感性器件,这势必会导致升压前端的损耗增加,效率变低,而且不利于减小系统的体积和质量。
综上所述,本文提出了一种适用于宽速度范围转矩脉动抑制拓扑及控制策略,该拓扑由一个开关管、一个二极管、一个电解电容以及三相桥式逆变电路构成。相较于上述DC-DC升压拓扑,本文所提拓扑结构简单,升压前端功率器件的电压应力均低于电源电压,且无需额外的感性器件,使得其在轻量化设计方面更具优势。针对所提控制拓扑,本文首先分析PWM_ON方式下的转矩脉动抑制策略的弊端。其次对所提拓扑的工作原理及转矩脉动抑制策略进行分析,指出在低速区间仅通过对换相期间的占空比进行修改足以保持转矩恒定;而在更高速的情况下,利用所提拓扑进一步提升母线电压便可实现电机的平滑换相。最后所提控制策略通过相应的Matlab仿真及DSP驱动实验,验证了其可行性和有效性。
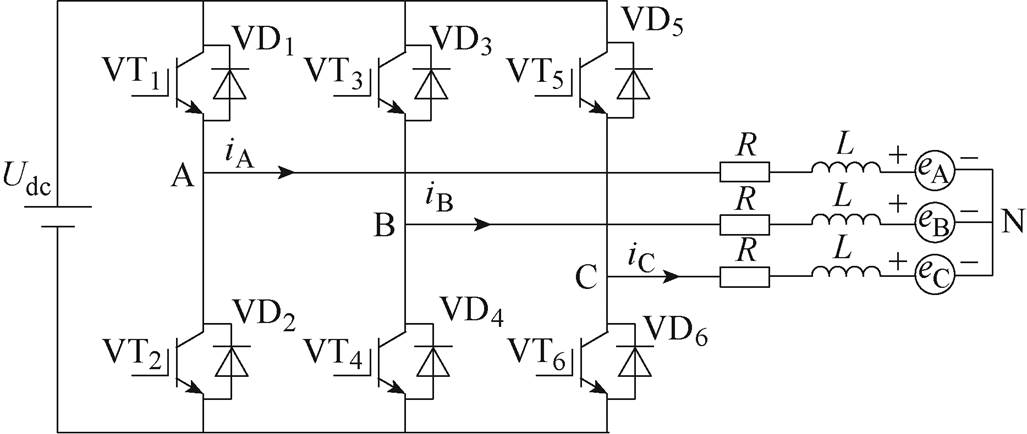
无刷直流电机的等效电路及其典型逆变电路结构如图1所示。图中,R、L分别为电枢绕组电阻、等效电感,ex、ix(x=A, B, C)分别为电枢绕组的相反电动势及相电流,Udc为直流母线电压,N为电机中性点。
图1 无刷直流电机及其典型逆变电路结构
Fig.1 BLDCM and its typical inverter circuit structure
无刷直流电机在120°导通方式下,常用的调制方式是产生换相转矩脉动相对最小的PWM_ON。然而,在该调制方式下产生的换相转矩脉动仍旧较大。以具有理想梯形波反电动势的无刷直流电机由A+B-导通切换至A+C-导通的换相过程为例,分析其换相转矩脉动及相应的抑制策略。
因采用PWM_ON方式,换相前为VT1斩波、VT4恒通,而在换相开始后变为VT1恒通、VT6斩波。假设换相前VT1所需占空比为Dn_com,其理论值可通过A、B两相电流的变化率为零来计算得到。在忽略电枢绕组电阻压降时,该占空比大小为
 (1)
(1)
式中,E为理想反电动势的幅值。
相应的电磁转矩Tn_com为
 (2)
(2)
式中,IA为换相前的A相电流;wm为转子机械角速度。
换相过程中,由于电枢绕组电感的存在,此时关断相相电流iB将通过该相桥臂中的续流二极管VD3流通,且考虑到换相时间较短及电流PI调节器限制,可近似认为换相过程中关断相反电动势和占空比保持不变。由此可得换相过程中的三相电流变化率为
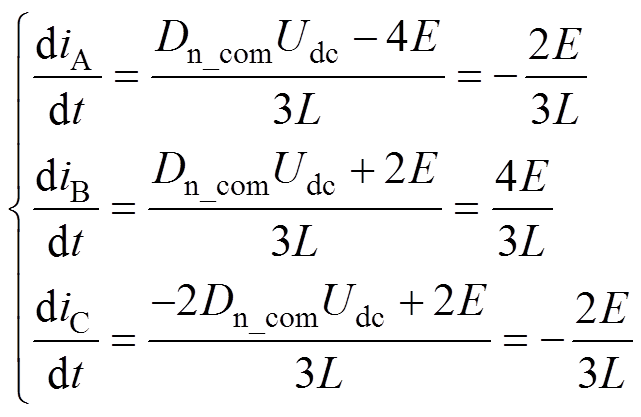 (3)
(3)
由式(3)计算得到换相开始到关断相电流降为零为止的时间段Dt为
 (4)
(4)
换相结束时刻的电磁转矩Tcom为
 (5)
(5)
换相期间的电流和转矩变化示意图如图2所示。由于换相期间Dn_comUdc<4E,导致非换相相电流iA减小,电磁转矩随之减小,对比式(2)和式(5),即换相起止时刻的电磁转矩大小可知,电磁转矩跌落幅度为50%,因此需要采用适当的策略抑制该换相转矩脉动。
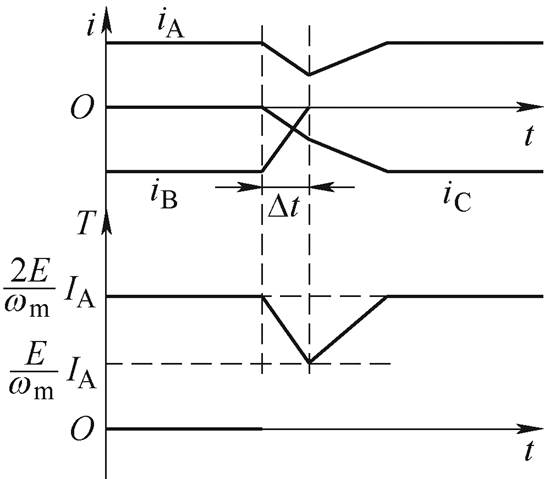
图2 换相期间电流和转矩变化示意图
Fig.2 Schematic diagram of current and torque changes during commutation
在众多换相转矩脉动抑制策略中,简单易实现的方法为将换相期间的占空比锁定至换相前占空比的两倍。由式(3)的A相电流变化率方程可轻易看出,若要该电流变化率为零,则换相过程中的占空比Dcom须满足
 (6)
(6)
式(6)表明,在换相期间只需把开通相的占空比提升到换相前的两倍,就可做到非换相相电流的变化率为零,有效抑制换相转矩脉动。
由式(6)可知,当转速维持较低,使得E不大于直流母线电压的1/4时,换相转矩脉动抑制效果显著;而当运行转速高,致使E大于直流母线电压的1/4时,无法消除换相转矩脉动,且随着转速增加,换相转矩脉动的抑制效果将会越来越差。图3给出了换相转矩脉动值DT%与wm之间的关系曲线。其换相转矩脉动值依据为
 (7)
(7)
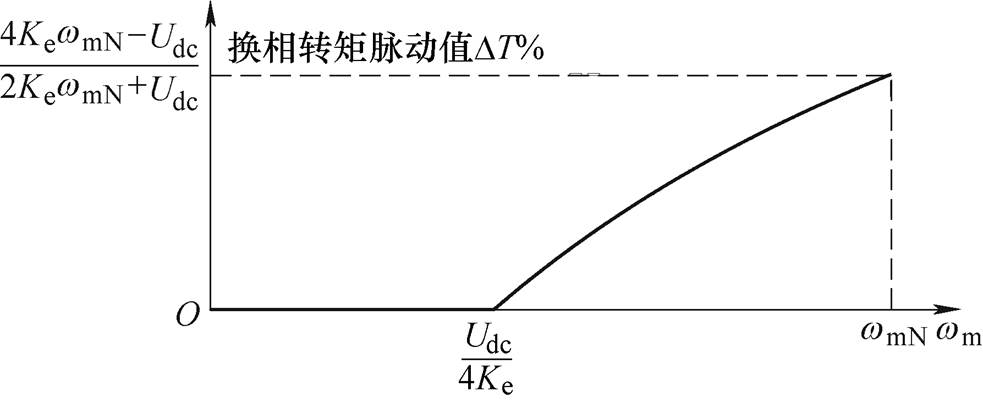
图3 换相转矩脉动值与角速度之间的关系曲线
Fig.3 Relation curve between commutation torque ripple value and angular speed
图3中,Ke为反电动势常数,是反电动势幅值与相应机械角速度之间的比值。由图3可知,以Udc/(4Ke)为基准角速度,低于该基准角速度时可有效抑制换相转矩脉动;反之,换相转矩脉动值随角速度增加而逐渐增加,到额定角速度时换相转矩脉动将达到顶峰。考虑到该基准角速度上、下呈现较大差异的换相转矩抑制效果,本文将低于Udc/(4Ke)的角速度定为低速;反之,为高速。
为解决高速运行时的较大换相转矩脉动,可行方法有两种:一是在换相期间改用其他调制方式,如进行斩波的开关器件由开通相改为关断相;二是在换相期间短暂提升直流母线电压使非换相相电流的电流变化率为零。其中,在换相期间改用其他调制方式的方法虽能有效抑制换相转矩脉动,但会延长换相时间。仍以由A+B-导通切换至A+C-导通的换相过程为例,在高速运行时,换相前为VT1斩波、VT4恒通,而在换相期间变为VT1和VT6恒通、VT4斩波。假定换相期间VT4的占空比为Dcom1时,三相电流变化率为
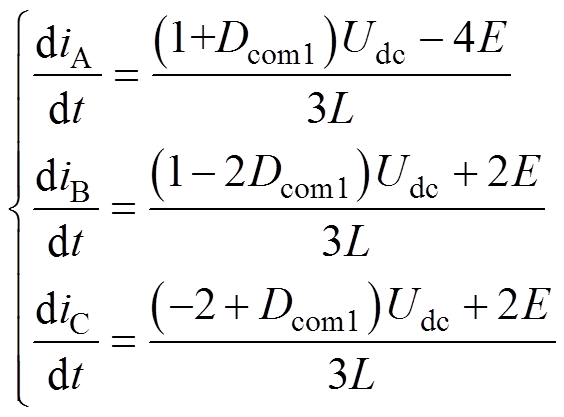 (8)
(8)
由式(8)的A相电流变化率为零的条件,再结合换相前的占空比表达式(1),可得到换相前后占空比之间的关系为
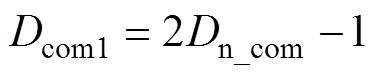 (9)
(9)
把式(9)代入B相或C相电流变化率方程式(8),可计算得到相应的换相时间Dtcom1为
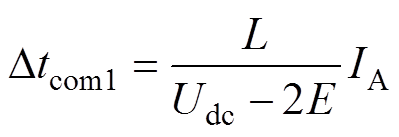 (10)
(10)
而相同速度下,若在换相期间短暂提升直流母线电压,能够实现换相期间非换相相电流变化率为零,则相应的换相时间Dtcom为
 (11)
(11)
因在高速运行时,E大于直流母线电压Udc的1/4,故
 (12)
(12)
由此可看出,只要在换相期间短暂提升直流母线电压,做到非换相相电流变化率为零,不但能够加大换相转矩脉动抑制速度范围,而且不会增加换相时间。
本文提出能够提升换相期间直流母线电压的回馈升压逆变电路拓扑,如图4所示。与传统三相桥式逆变电路相比,该拓扑增加了包括升压电容C0、开关管VT0和二极管VD0在内的升压前端。其中,电容C0选择体积比容量大的电解电容。
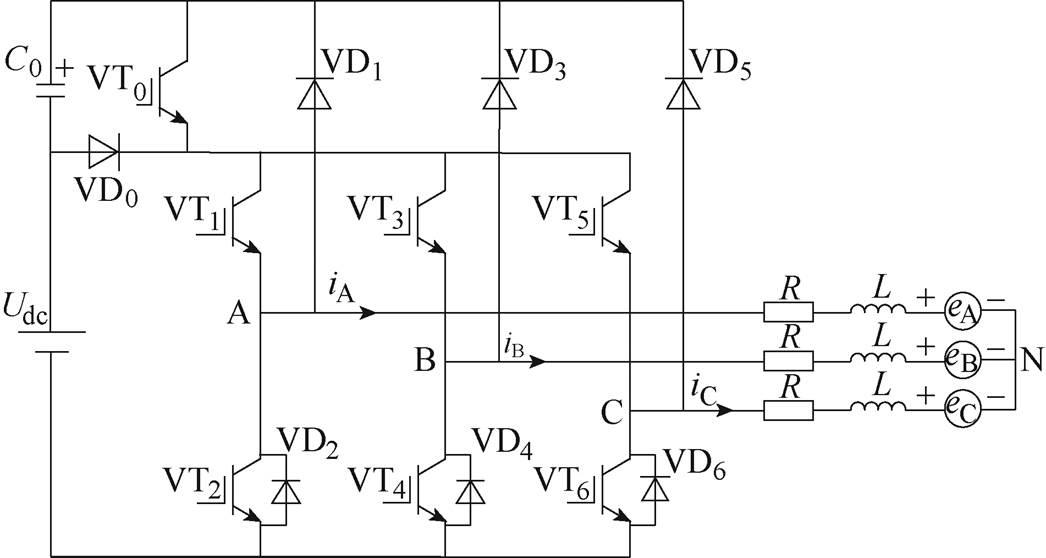
图4 回馈升压逆变电路拓扑
Fig.4 Regenerative boost inverter topology
所提逆变电路在高速换相期间能够把直流母线电压Udc提升至Udc+UC0,通过事先给电容C0充电至所需值,不但有效抑制换相转矩脉动,而且可实现快速换相。以由A+B-导通切换至A+C-导通的换相过程为例,换相期间,直流母线电压的提升(由A+B-导通切换至A+C-导通为例)如图5所示,VT0、VT1和VT6恒通。此时,三相电流变化率为
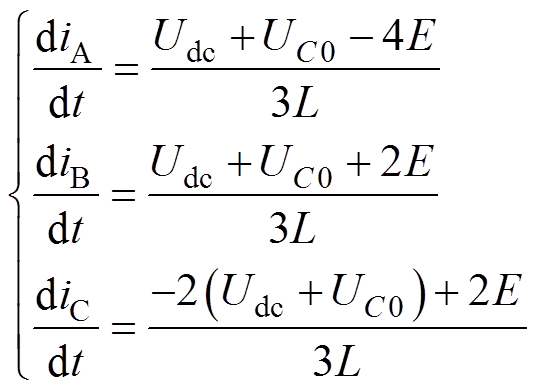 (13)
(13)
由式(13)的A相电流变化率方程可计算得到,抑制换相转矩脉动所需电容C0两端电压为4E-Udc,把C0电压代入式(13)的B或C相电流变化率方程后,计算出的换相时间与式(11)相同。
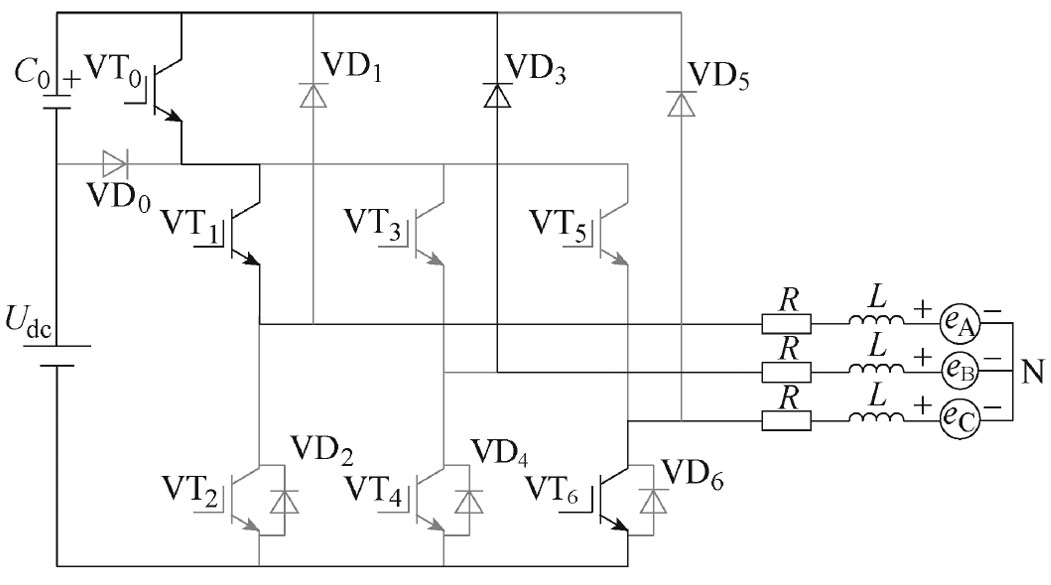
图5 换相期间,直流母线电压的提升回路(由A+B-导通切换至A+C-导通为例)
Fig.5 Increase of DC bus voltage during commutation (switching from A+B- conduction to A+C- conduction as an example)
此外,所提逆变电路利用在高速非换相期间的回馈电能可单独给电容C0充电至所需电压。以A+B-导通为例,非换相期间的回馈升压回路(A+B-为例)如图6所示,当非换相期间VT1恒通、VT4斩波时,在VT4截止期间无刷直流电机产生的回馈电能将全部馈送到电容C0。此时,单个开关周期内增加的电容C0两端电压为
 (14)
(14)
式中,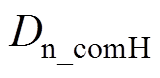 为VT4的占空比;Tc为开关周期。
为VT4的占空比;Tc为开关周期。
图6 非换相期间的回馈升压回路(A+B-为例)
Fig.6 Regenerative boost circuit during non-commutation (A+B- for example)
由式(14)可看出,随着转速增加,所需UC0也增加,随之一个开关周期内增加的电容电压减小。
1.4.1 低速(Udc≥4E)运行时的策略
表1给出了低速非换相期间各扇区的开关管状态查询。表中,占空比D由非换相电流控制器实时给定,Sc为当前时刻电容C0所需的充放电状态。低速运行时,虽无需电容C0抬升母线电压,其理论期望值应为0,但为了防止对该电容进行负充电,实际将电容C0的电压期望值设定为相比于直流母线电压Udc很小的某一正值。对该电容电压采用滞环跟踪控制方式。当电容C0的期望值与实际值之间的偏差超过正的给定阈值时,表明当前时刻需要考虑充电,Sc记为1;反之,当低于负的给定阈值时,表明当前时刻需要考虑放电,Sc记为0。开关管状态自左向右依次为VT0~VT6的开关状态,其中,“0”表示开关管关断,“1”表示开关管导通,“D”表示开关管导通占空比为D。
表1 低速非换相期间开关管状态查询表
Tab.1 Switching table for low speed non-commutation

扇区SSc 10 Ⅰ (A+B-)0|D0|01|001|D0|01|00 Ⅱ (A+C-)0|10|00|0D1|10|00|0D Ⅲ (B+C-)0|00|D0|011|00|D0|01 Ⅳ (B+A-)0|0D|10|001|0D|10|00 Ⅴ (C+A-)0|01|00|D01|01|00|D0 Ⅵ (C+B-)0|00|0D|101|00|0D|10
由表1可看出,开关管VT1~VT6的调制遵循传统的PWM_ON方式,开关管VT0的开通和关断取决于Sc状态。
在低速换相期间,由1.1节所述只需把占空比提升至换相前的两倍即可,无需改变调制方式。
1.4.2 高速(Udc<4E)运行时的策略
表2、表3分别给出了高速非换相、换相期间各扇区的开关管状态查询。考虑到高速换相期间,电容C0必定进行放电,故在非换相期间确定电容C0所需充放电状态时,只需要考虑是否需要充电。无需充电时,Sc记为0;需要充电时,Sc记为1。另外,表2中,占空比D对应的两个电平分别为Udc和0,而占空比 对应的两个电平分别为Udc和-UC0,故产生相同输出电压条件下占空比D与之间的关系为
对应的两个电平分别为Udc和-UC0,故产生相同输出电压条件下占空比D与之间的关系为
 (15)
(15)
表2 高速非换相期间开关管状态查询表
Tab.2 Switching table for high speed non-commutation

扇区SSc 01 Ⅰ (A+B-)0|D0|01|000|10|0|00 Ⅱ (A+C-)0|D0|00|010|10|00|0 Ⅲ (B+C-)0|00|D0|010|00|10|0 Ⅳ (B+A-)0|01|D0|000|0|10|00 Ⅴ (C+A-)0|01|00|D00|0|00|10 Ⅵ (C+B-)0|00|01|D00|00|0|10
表3 高速换相期间开关管状态查询表
Tab.3 Switching table for high speed commutation
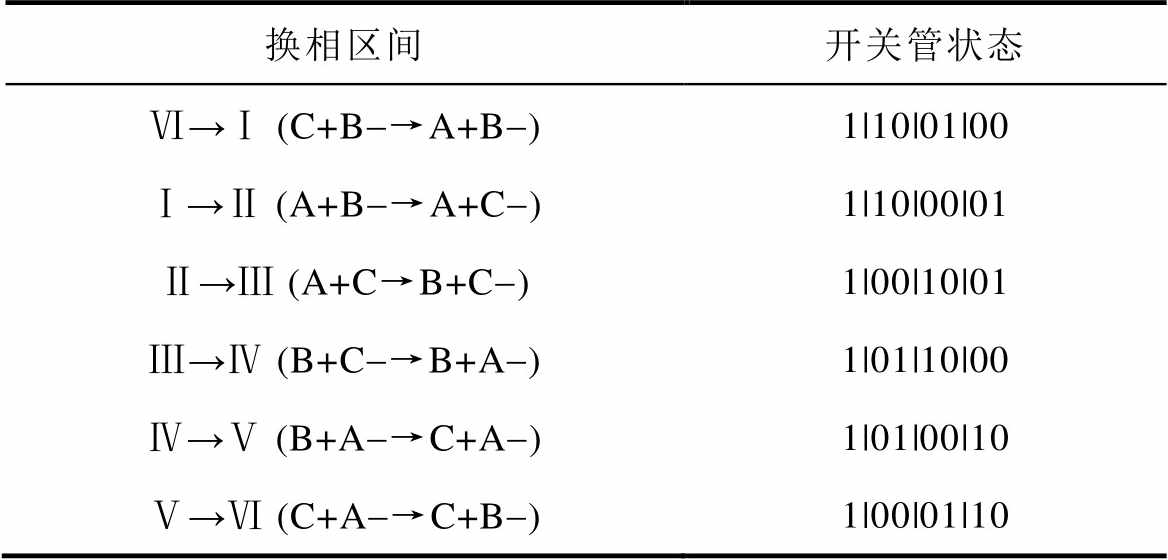
换相区间开关管状态 Ⅵ→Ⅰ (C+B-→A+B-)1|10|01|00 Ⅰ→Ⅱ (A+B-→A+C-)1|10|00|01 Ⅱ→Ⅲ (A+C→B+C-)1|00|10|01 Ⅲ→Ⅳ (B+C-→B+A-)1|01|10|00 Ⅳ→Ⅴ (B+A-→C+A-)1|01|00|10 Ⅴ→Ⅵ (C+A-→C+B-)1|00|01|10
UC0的期望值为
 (16)
(16)
由表2可看出,在高速非换相期间,当电容C0无需充电时,开关管VT1~VT6的调制遵循H_PWM- L_ON方式;而当电容C0需要充电时,遵循H_ON- L_PWM方式,与低速非换相期间的调制方式不同。
基于上述理论分析,构建了如图7所示的宽速度范围转矩脉动抑制的整体系统控制框图。采用传统的转速电流双闭环控制,该控制系统主要由相电流选择单元、换相信号判断单元、电容电压期望值计算单元、占空比换算单元、开关管状态查询表构成。
系统中,相电流选择单元根据扇区信息S从三相检测电流中确定出非换相相电流in_com和关断相相电流iout;换相信号Scom由关断相相电流iout是否接近零来判断当前换相是否结束;电容电压期望值是将机械角速度代入式(16)计算得到,并与电容电压实际值作差后通过两电平滞环控制器得到电容的充放电状态Sc;占空比换算单元负责给出开关管状态查询表所需占空比D*,若当前时刻处于低速换相期间,则D*=2D,而若当前时刻处于高速非换相充电期间,则D*=,其他时刻,D*=D。
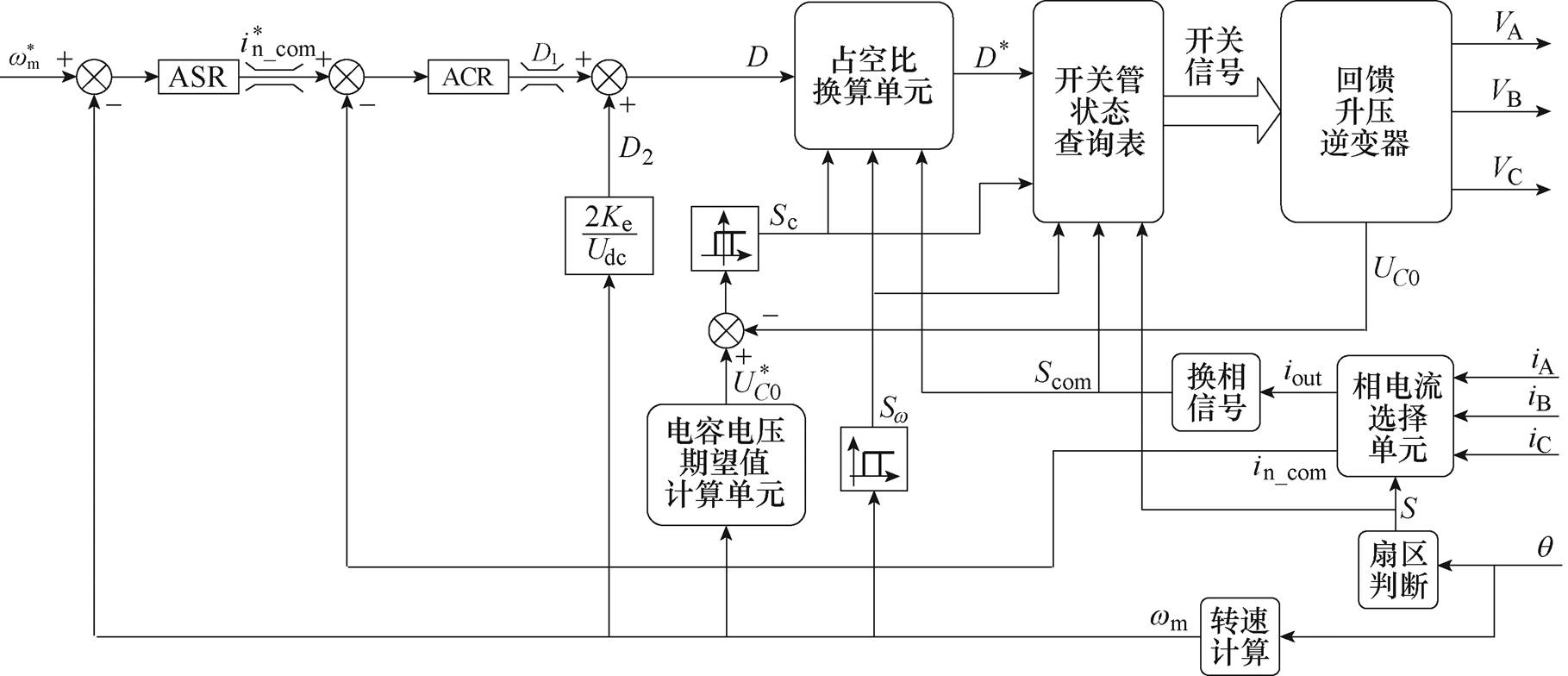
图7 宽速度范围转矩脉动抑制的整体系统控制框图
Fig.7 Overall system control block diagram for wide speed range torque ripple suppression
低速运行时,额定负载下单个开关周期内电容C0的充/放电引起的升/降压应远小于电容电压滞环控制器的阈值DUTH。通过分析低速运行时的充、放电等效回路,其电容C0升、降压的最大值分别为
 (17)
(17)
式中,IN为额定电流。
高速换相期间,额定负载下电容C0放电引起的最大压降应小于电容电压滞环控制器的阈值DUTH,即
 (18)
(18)
在高速的变速期间,由式(16)可知,电容C0充、放电速率应大于随转速变化而变化的电容C0给定电压速率,即
 (19)
(19)
由式(17)~式(19),可得到电容C0应满足
 (20)
(20)
式中,J为转动惯量。
为了验证本文所提方法的有效性,对一台型号为92BL430的三相5对极无刷直流电机在不同负载和转速条件下进行仿真和实验。其中仿真是在Simulink环境中搭建,实验是在以TMS320F28335为控制核心搭建的如图8所示的实验平台中进行。仿真和实验中,电机的主要参数见表4。通过单相不控整流提供300 V直流电源电压,功率器件的开关频率为20 kHz,电流、电压采样和控制周期均为50 ms,速度控制周期为500 ms。负载采用Magtrol公司的磁滞测功机(HD-705-8NA-0100型),其驱动可由该公司提供的DSP6001型控制器提供,负载转矩大小可通过控制面板具体设定。仿真和实验验证中系统的主要参数见表4,其中,电容的容值根据式(20),最终选定为470 mF。
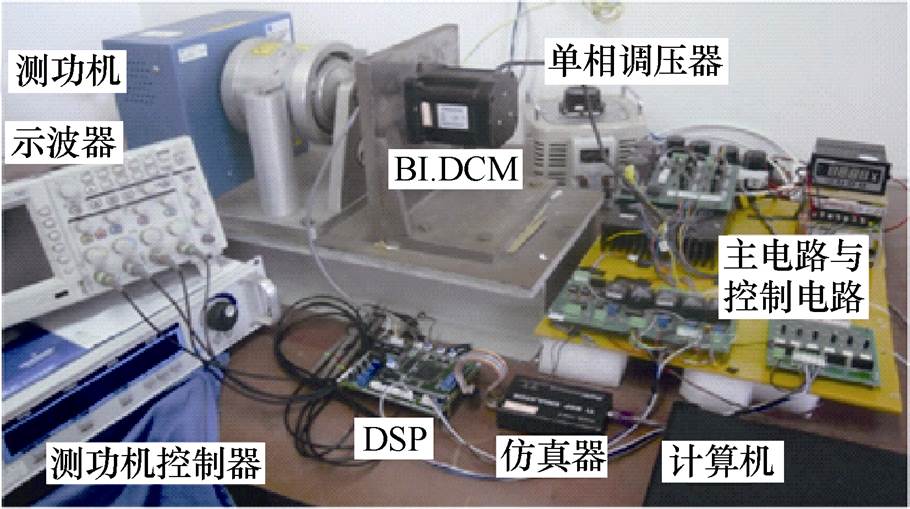
图8 无刷直流电机控制实验系统
Fig.8 Control experiment system of BLDCM
实验样机的实际反电动势波形并非理想梯形波,其实测反电动势波形如图9所示。
图10分别给出了转速为500 r/min和2 000 r/min额定负载下传统方波闭环控制的仿真结果。调制方式选用了PWM_ON型。作为仿真结果依次给出了电磁转矩、参考电流、三相实际电流、占空比以及A相绕组首端对直流母线负极的电压。由该仿真结果可看出,在传统方波闭环驱动下尽管电流PI调节器的输出随非换相相电流的减小而迅速增加,但还是对换相过程中非换相相电流的波动抑制效果欠佳,进而呈现电磁转矩的较大脉动。此外,随着转速的升高,非换相期间的电流波动将会更大。依据仿真结果,转速为500 r/min时的非换相相电流的波动率为18%,而在转速升高至2 000 r/min时,波动率增大到32%。
表4 系统主要参数
Tab.4 Main parameters of the system
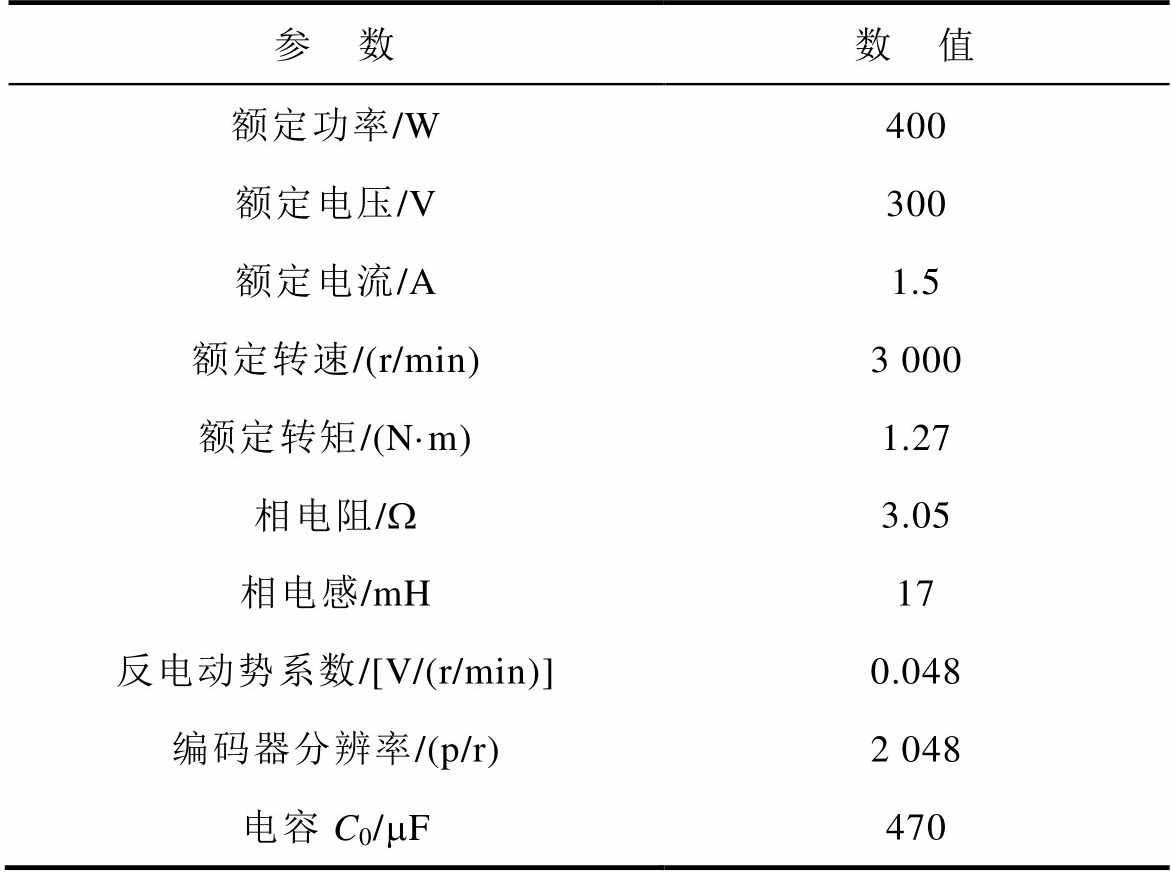
参 数数 值 额定功率/W400 额定电压/V300 额定电流/A1.5 额定转速/(r/min)3 000 额定转矩/(N·m)1.27 相电阻/W3.05 相电感/mH17 反电动势系数/[V/(r/min)]0.048 编码器分辨率/(p/r)2 048 电容C0/mF470
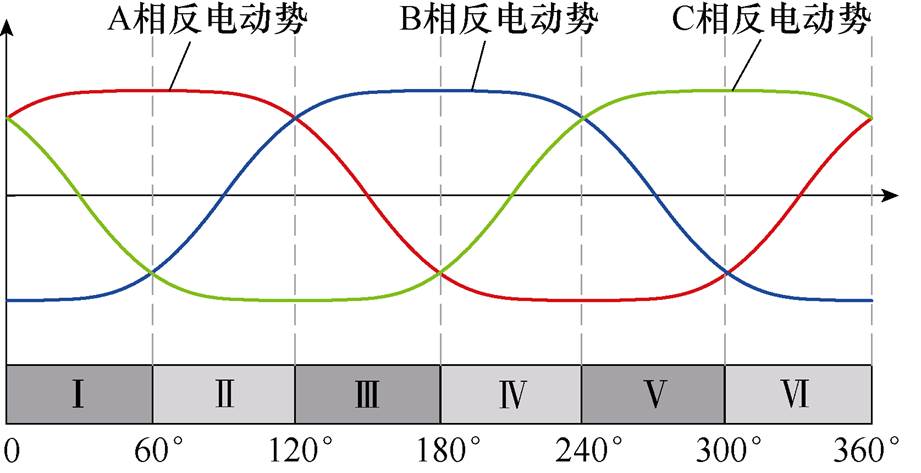
图9 实验样机的反电动势波形
Fig.9 Measured back-EMF waveforms of experimental motor
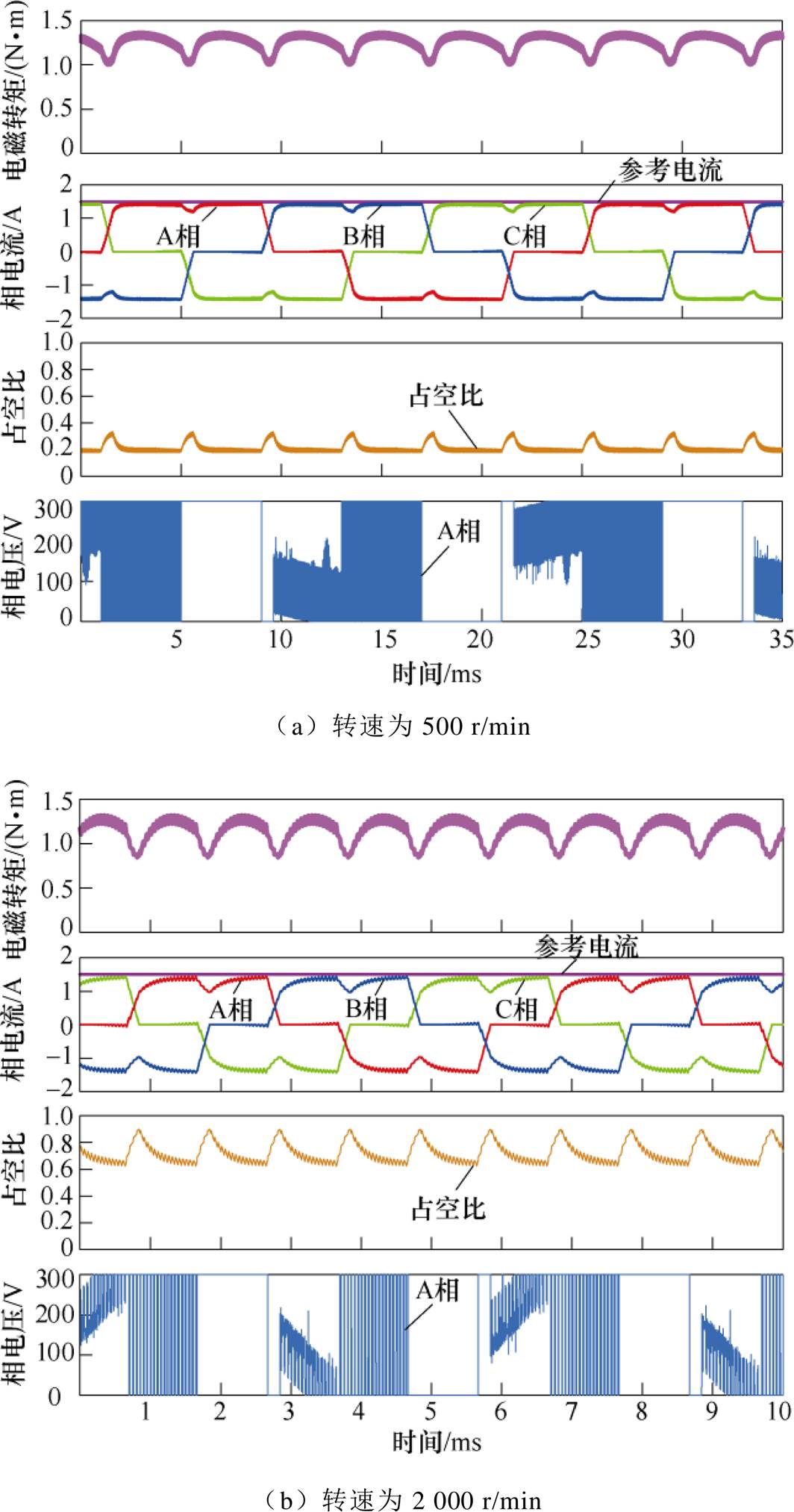
图10 传统方波闭环控制系统的仿真结果
Fig.10 Simulation results of traditional square wave closed-loop control system
图11给出了额定负载下转速分别为500 r/min和2 000 r/min时传统方波闭环控制系统的实验结果。图中依次给出了参考电流、A相电流、占空比和A相电压。由图11中的电流波形可看出,仿真与实验结果基本吻合。依据实验结果,转速为500 r/min时的非换相相电流的波动率为20%,而在转速升高至2 000 r/min时,波动率增大到39%。
图12给出了额定负载下转速分别为500 r/min和2 000 r/min时传统方波闭环控制的电磁转矩波形。可以看出,由于在换相期间开通相相电流的上升率小于关断相相电流的下降率,使得换相期间非换相相电流随之减小,进而导致换相转矩脉动。由电磁转矩波形可得,转速为500 r/min时的换相转矩脉动为26%,而在转速升高至2 000 r/min时,换相转矩脉动增大到40%。
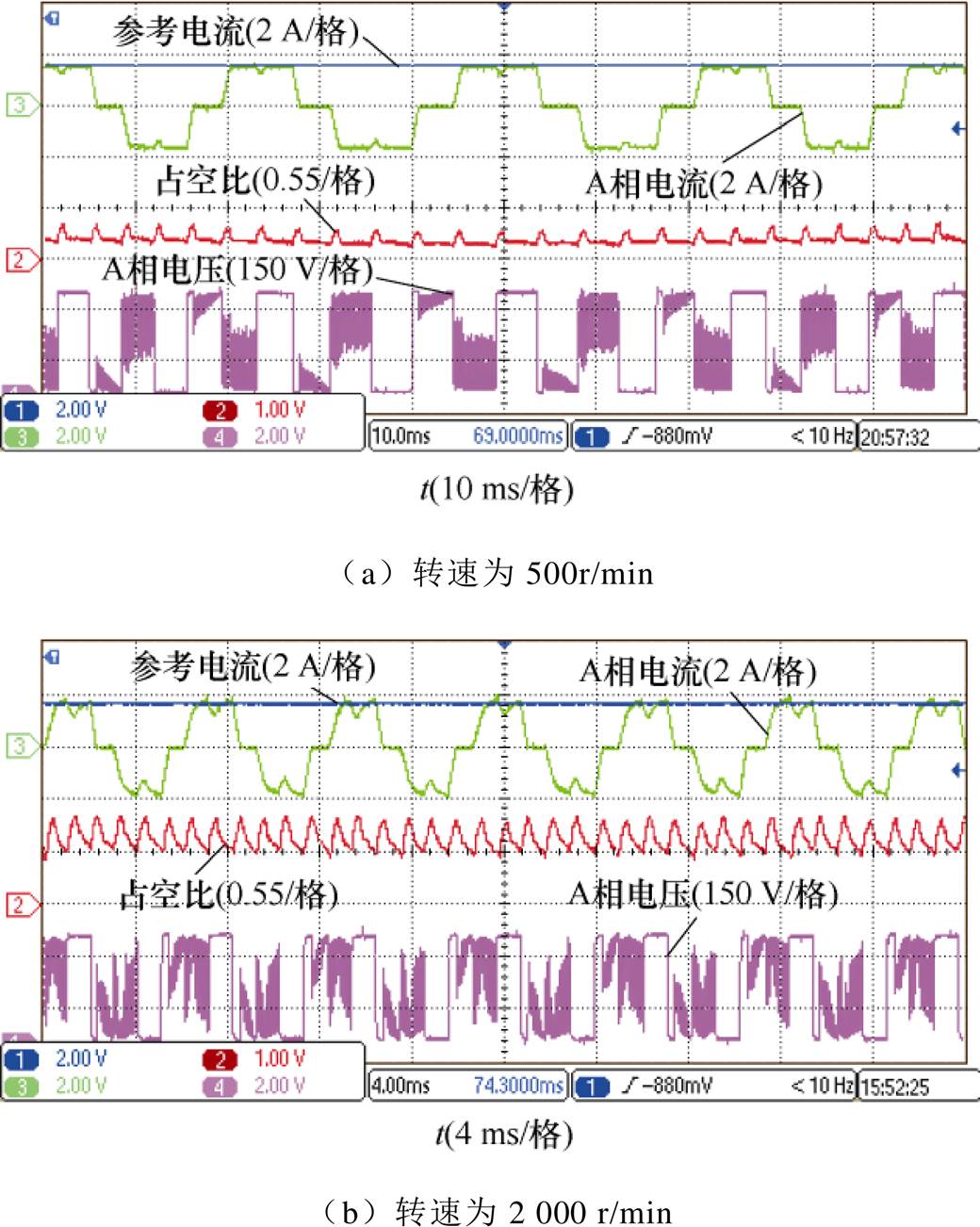
图11 传统方波闭环控制系统的实验结果
Fig.11 Experimental results of traditional square wave closed-loop control system
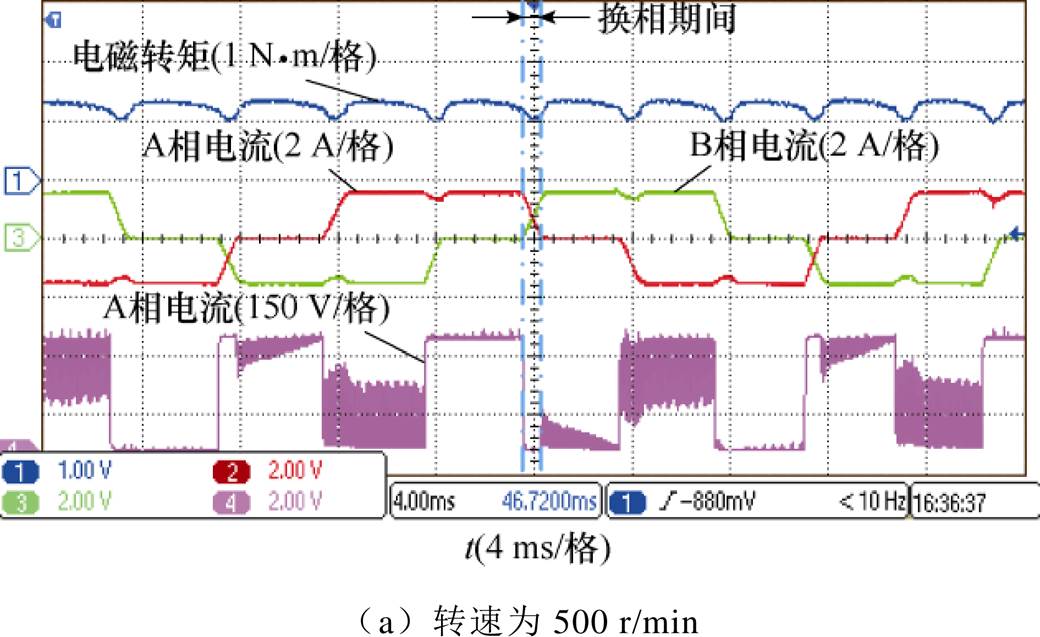
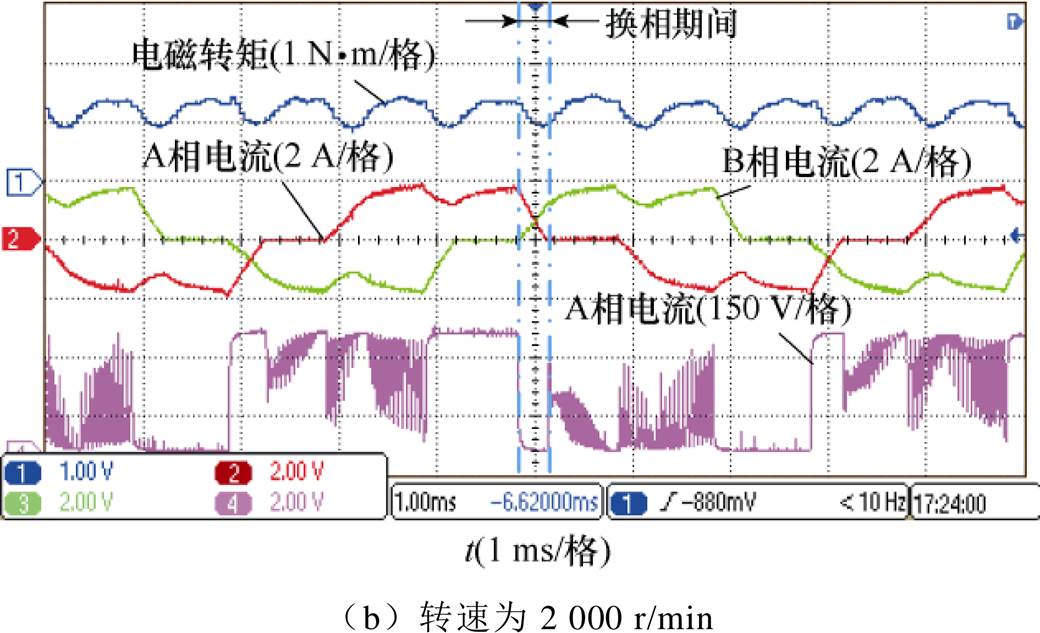
图12 传统方波闭环控制系统的电磁转矩波形
Fig.12 Electromagnetic torque waveforms of traditional square wave closed-loop control system
图13给出了转速为500 r/min和2 000 r/min,额定负载下基于回馈升压逆变器控制的仿真结果。转速为500 r/min时,控制系统采用1.4节给出的低速运行策略。由图13a中的各扇区的A相端电压波形可以看出,开关管VT1~VT6的调制方式遵循PWM_ ON型。在低速运行策略中,换相期间开关管VT1~VT6中进行PWM的开关管的占空比为非换相期间时占空比的2倍。由图13a中电磁转矩波形可看出,在该策略下换相转矩脉动抑制效果较为显著。此外,为防止对电容C0进行负充电而设定的该电压参考值为7.5 V,对该电压进行滞环跟踪控制所需阈值设定为2.5 V。由图13a中给出的电容C0电压参考值与实际值波形可看出,在扇区Ⅱ中存在电容C0的可放电状态到可充电状态的切换即开关管VT0由导通到截止的转变,进而在该扇区的A相端电压大小在该时刻有轻微减小。还有,图13a中的电容C0电压在扇区Ⅴ中保持不变是因为所提低速运行策略在可充电状态下第Ⅰ、Ⅲ和Ⅴ扇区内无充电回路的缘故。
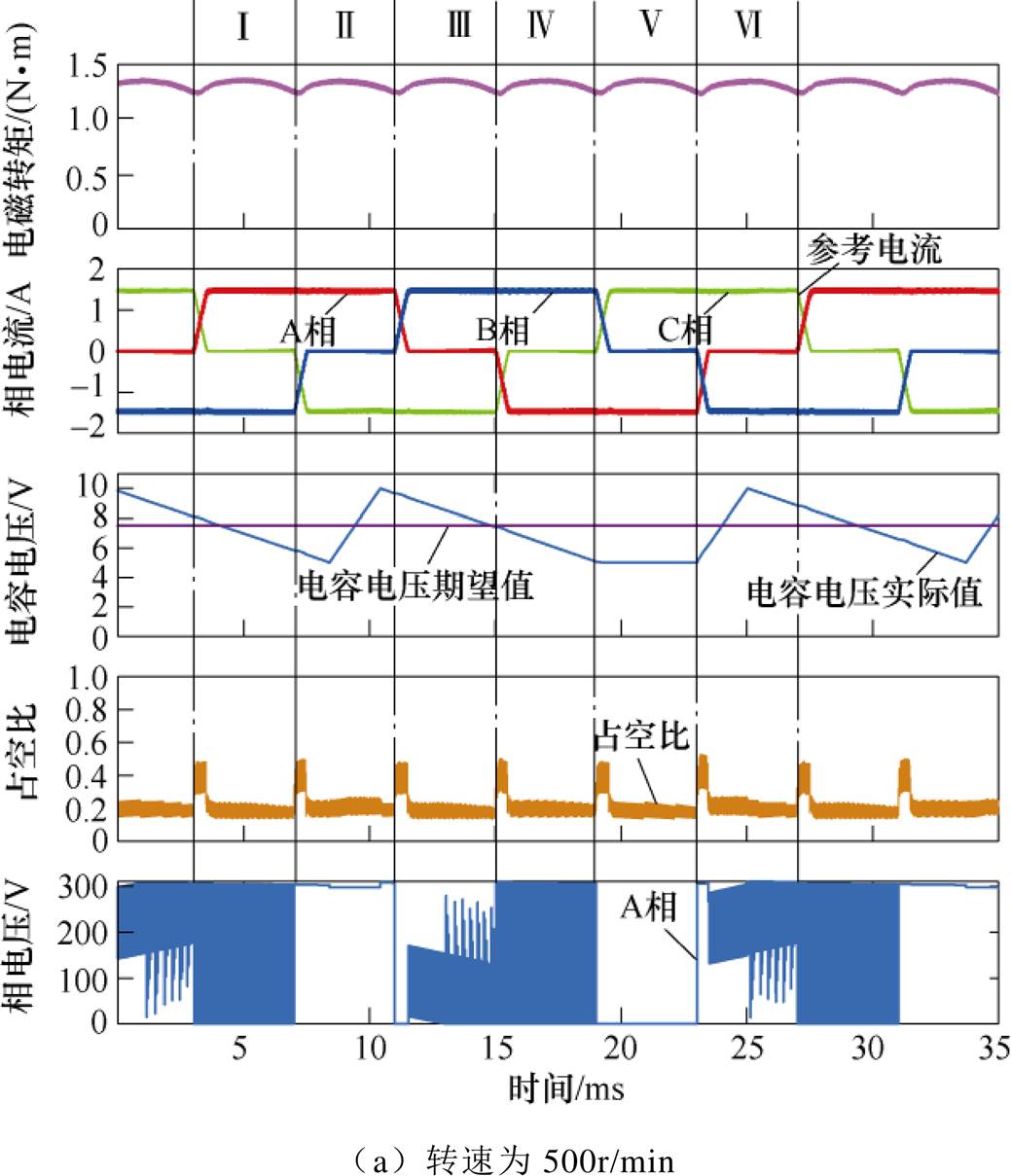
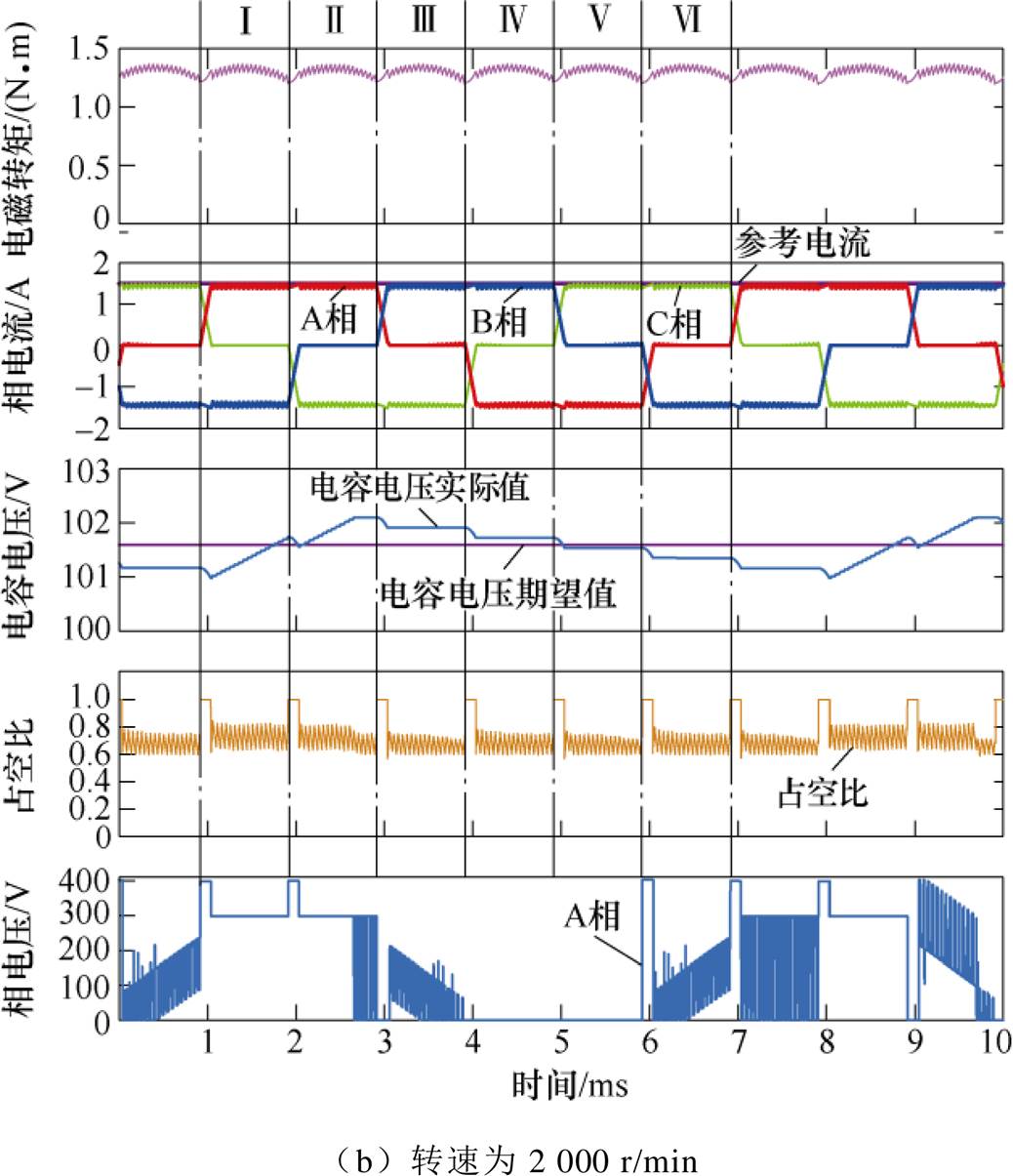
图13 基于回馈升压逆变器控制系统的仿真结果
Fig.13 Simulation results based onregenerative boost inverter control system
转速为2 000 r/min时,控制系统采用1.4节给出的高速运行策略。依据该策略,在换相期间开关管VT0恒通、开关管VT1~VT6不斩波,以AB导通切换至AC导通为例,开关管VT0、VT1和VT6恒通,开关管VT2~VT5关断,而在非换相期间开关管VT0截止、VT1~VT6的调制方式则根据电容C0的充放电状态而定。在图13b扇区Ⅱ中存在电容C0的需充电状态到无需充电状态的切换即H_ON-L_PWM到H_PWM-L_ON的切换,进而A相端电压由Udc变为Udc与0构成的斩波电压。换相期间,抑制换相转矩脉动所需电容C0电压参考值根据当前转速由式(16)计算得到。由图13b的换相期间电磁转矩波形可看出,在该策略下可有效抑制换相转矩脉动。
图14给出了额定负载下转速分别为500 r/min和2 000 r/min时基于回馈升压逆变器控制系统的实验结果。由图14的电流波形可看出,不管低速还是高速运行,仿真与实验结果基本吻合,非换相相电流的波动率均小于8.5%,换相期间对非换相相电流波动抑制效果显著。此外,两种转速下的换相时间段分别为510 ms和126 ms,近似与式(11)给出的理论上的换相时间相同。
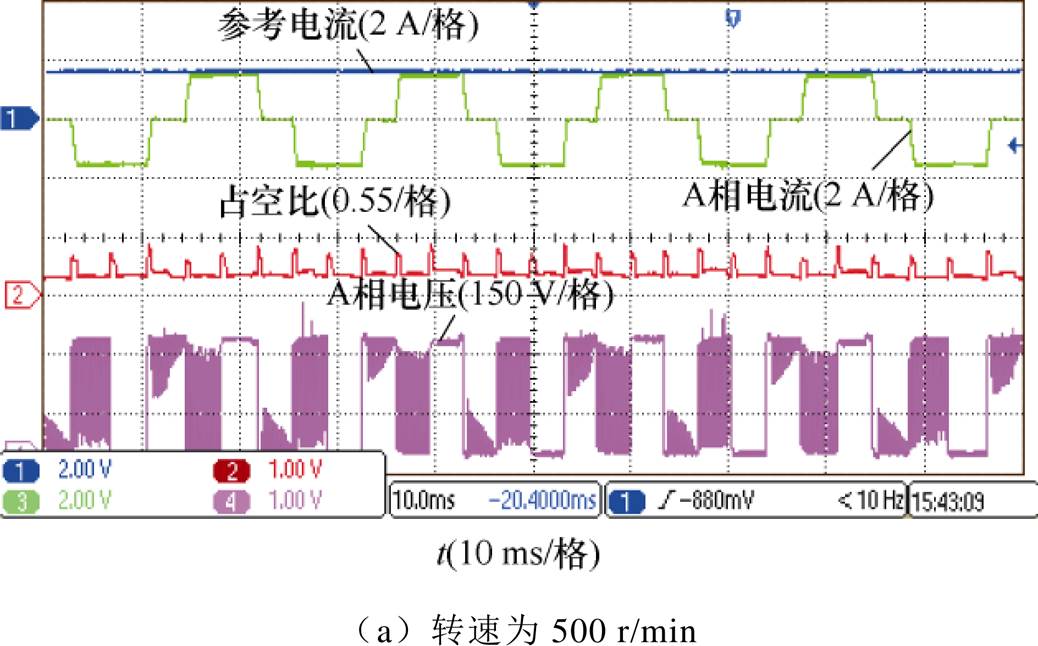
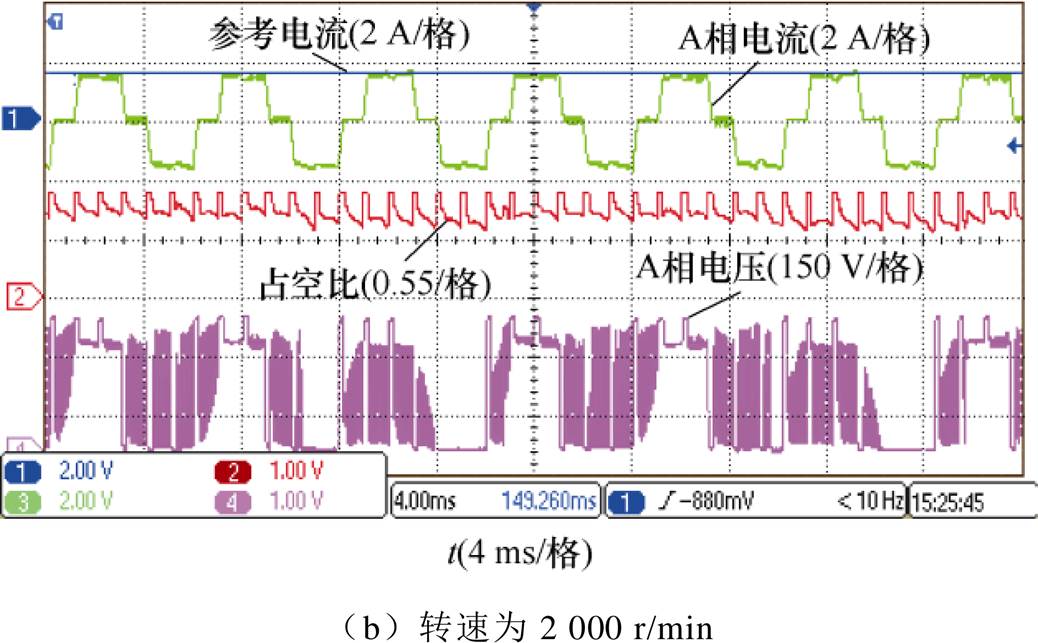
图14 基于回馈升压逆变器控制系统的实验结果
Fig.14 Experimental results based onregenerative boost inverter control system
图15给出了额定负载下转速分别为500 r/min和2 000 r/min时基于回馈升压逆变器控制系统的电磁转矩波形。由图15可以看出,本文所提控制系统换相期间开通相和关断相相电流的上升率和下降率基本一致,因此换相期间非换相相电流波动较小。由电磁转矩波形可得,转速为500 r/min时的换相转矩脉动为8.6%,而在转速升高至2 000 r/min时,换相转矩脉动为10.3%。
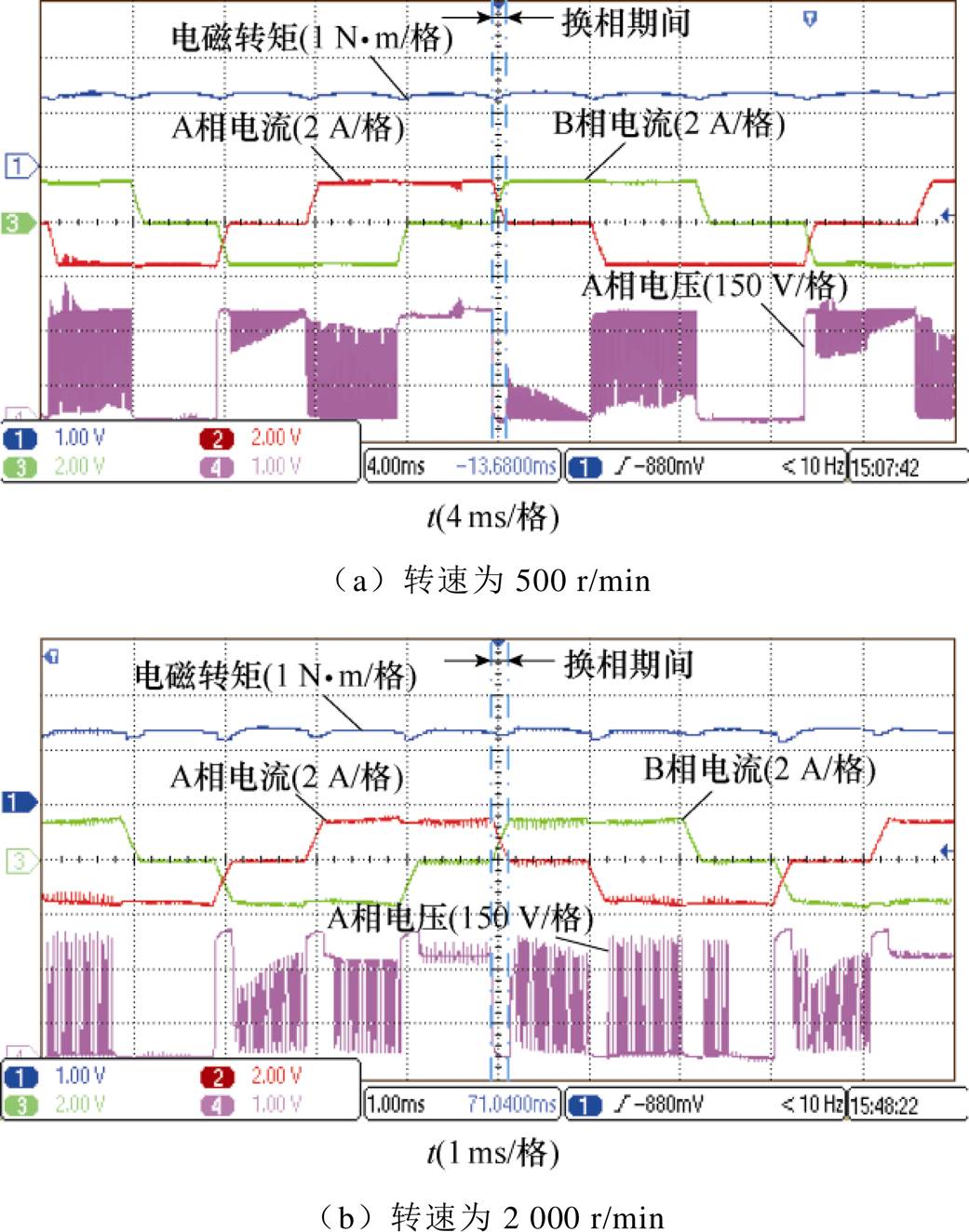
图15 基于回馈升压逆变器控制系统的电磁转矩波形
Fig.15 Electromagnetic torque waveforms based onregenerative boost inverter control system
由图15b的电压波形可看出,换相期间母线电压抬升至期望值,其超出Udc的电压均由电容C0提供。此外,由图15中A相端电压波形还可看出,非换相期间电容C0是否处于充电状态。与此相比,仅由图15a,无法看出电容C0的充放电状态,为此图16给出了转速为500 r/min、额定负载下实测的电容电压和三相电流波形。该转速下,电容C0的参考电压设定为7.5 V。由电容电压波形可看出,电容电压的跟踪性能良好。此外,在图中标注的扇区Ⅲ中电容电压保持不变,表明在该扇区电容C0处于可充电状态。
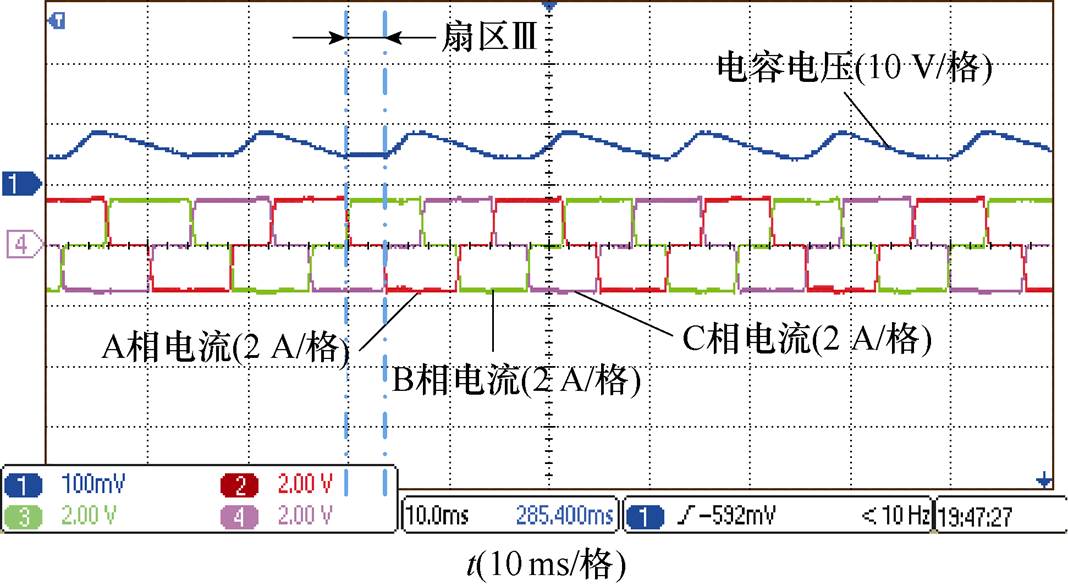
图16 500 r/min下电容电压与三相电流的实际波形
Fig. 16 Actual waveforms of capacitance voltage and three phase current at 500 r/min
本文针对方波驱动下无刷直流电机固有的换相转矩脉动问题,提出了一种适用于宽速度范围转矩脉动抑制的回馈升压逆变器拓扑及控制策略。并对单个开关周期内电容电压的变化进行定量分析,同时给出了电容的选型方法。所提控制方法具有以下特点:
1)所提控制方案能够提供电机换相时所需的更高母线电压,从而实现宽速度范围内的快速、平稳 换相。
2)所提电路结构简单、控制方便,电容能量全部来自于续流回路而无需外加电源,有效地提升了电机能量的利用率。
参考文献
[1] 夏长亮. 无刷直流电机控制系统[M]. 北京: 科学出版社, 2009.
[2] 武洁, 王文磊, 张恒毅, 等. 一种带抽头线圈的无刷直流电机无线驱动与控制方法[J]. 电工技术学报, 2022, 37(23): 6116-6125.
Wu Jie, Wang Wenlei, Zhang Hengyi, et al. A wire- less drive and control method for brushless DC motor with tapped coil[J]. Transactions of China Electro- technical Society, 2022, 37(23): 6116-6125.
[3] 李珍国, 孙启航, 王鹏磊, 等. 无刷直流电机无直轴电枢反应的非正弦转子磁场定向矢量控制技术[J]. 电工技术学报, 2022, 37(16): 4094-4103.
Li Zhenguo, Sun Qihang, Wang Penglei, et al. Non- sinusoidal rotor field oriented vector control tech- nology without d-axis armature reaction in brushless DC motor[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4094-4103.
[4] 谭建成. 永磁无刷直流电机技术[M]. 北京: 机械工业出版社, 2011.
[5] Jiang Weidong, Huang Hui, Wang Jinping, et al. Commutation analysis of brushless DC motor and reducing commutation torque ripple in the two-phase stationary frame[J]. IEEE Transactions on Power Electronics, 2017, 32(6): 4675-4682.
[6] 李珍国, 王鹏磊, 孙启航, 等. 基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术[J]. 电工技术学报, 2022, 37(22): 5788-5798.
Li Zhenguo, Wang Penglei, Sun Qihang, et al. Rotor field oriented instantaneous torque control technology of brushless DC motor based on per-phase rotating coordinate transformation[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5788-5798.
[7] 李珍国, 周生海, 王江浩, 等. 无刷直流电动机双闭环调速系统的转矩脉动抑制研究[J]. 电工技术学报, 2015, 30(15): 156-163.
Li Zhenguo, Zhou Shenghai, Wang Jianghao, et al. The research on the brushless DC motor double-loop speed control system for torque ripple reduction[J]. Transactions of China Electrotechnical Society, 2015, 30(15): 156-163.
[8] 李珍国, 王江浩, 高雪飞, 等. 一种合成电流控制的无刷直流电机转矩脉动抑制系统[J]. 中国电机工程学报, 2015, 35(21): 5592-5599.
Li Zhenguo, Wang Jianghao, Gao Xuefei, et al. Torque ripple reduction systems for brushless DC motors with resultant current control[J]. Proceedings of the CSEE,2015, 35(21): 5592-5599.
[9] 陆可, 蔡广瀚, 向南辉, 等. 基于电压矢量注入的无刷直流电机换相转矩脉动抑制方法[J]. 中国电机工程学报, 2021, 41(10): 3592-3601.
Lu Ke, Cai Guanghan, Xiang Nanhui, et al. Method for suppressing commutation torque ripple of brush- less DC motor based on voltage vector injection[J]. Proceedings of the CSEE, 2021, 41(10): 3592-3601.
[10] Xia Changliang, Xiao Youwen, Chen Wei, et al. Torque ripple reduction in brushless DC drives based on reference current optimization using integral variable structure control[J]. IEEE Transactions on Industrial Electronics, 2013, 61(2): 738-752.
[11] 姜卫东, 胡杨, 黄辉, 等. 采用坐标变换的无刷直流电机换相过程分析及减小换相转矩脉动的方法[J]. 中国电机工程学报, 2015, 35(24): 6527-6534.
Jiang Weidong, Hu Yang, Huang Hui, et al. The commutation process analysis and the method reducing commutation torque ripple of brushless DC motors based on the coordinate transformation[J]. Proceedings of the CSEE, 2015, 35(24): 6527-6534.
[12] 李珍国, 章松发, 周生海, 等. 考虑转矩脉动最小化的无刷直流电机直接转矩控制系统[J]. 电工技术学报, 2014, 29(1): 139-146.
Li Zhenguo, Zhang Songfa, Zhou Shenghai, et al. Direct torque control of brushless DC motor con- sidering torque ripple minimization[J]. Transactions of China Electrotechnical Society, 2014, 29(1): 139- 146.
[13] Liu Yong, Zhu Ziqiang, David H. Commutation- torque-ripple minimization in direct-torque-controlled PM brushless DC drives[J]. IEEE Transactions on Industry Applications, 2007, 43(4): 1012-1021.
[14] Shi Tingna, Cao Yanfei, Jiang Guokai, et al. A torque control strategy for torque ripple reduction of brushless DC motor with nonideal back electromotive force[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4423-4433.
[15] 夏鲲, 朱琳玲, 曾彦能, 等. 基于准Z源网络的永磁无刷直流电机换相转矩脉动抑制方法[J]. 中国电机工程学报, 2015, 35(4): 971-978.
Xia Kun, Zhu Linling, Zeng Yanneng, et al. Researches on the method of suppressing com- mutation torque ripple for brushless DC motors based on a quasi-Z-source net[J]. Proceedings of the CSEE, 2015, 35(4): 971-978.
[16] 朱俊杰, 刘浩然, 蒋峰, 等. 无刷直流电机转矩脉动抑制系统的新型拓扑研究[J]. 电工技术学报, 2018, 33(17): 4060-4068.
Zhu Junjie, Liu Haoran, Jiang Feng, et al. A new topology research on torque ripple suppression system of brushless motor[J]. Transactions of China Elec- trotechnical Society, 2018, 33(17): 4060-4068.
[17] Shi Tingna, Guo Yuntao, Song Peng, et al. A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J]. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3483-3490.
[18] 姚绪梁, 赵继成, 王景芳, 等. 一种基于辅助升压前端的无刷直流电机换相转矩脉动抑制方法研究[J]. 中国电机工程学报, 2020, 40(9): 3021-3030.
Yao Xuliang, Zhao Jicheng, Wang Jingfang, et al. Research on suppressing commutation torque ripple of brushless DC motor based on an auxiliary step-up front end[J]. Proceedings of the CSEE, 2020, 40(9): 3021-3030.
[19] Cao Yanfei, Shi Tingna, Li Xinmin, et al. A com- mutation torque ripple suppression strategy for brush- less DC motor based on diode-assisted Buck-Boost inverter[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5594-5605.
Abstract Brushless DC motors are favored in aerospace, industrial automation, and household appliances because of their high power density, high efficiency, simple structure, and small size. However, the torque ripple inherent in the brushless DC motor limits its use in high-stability, high-precision applications. The torque ripple caused by commutation is the largest and can be up to 50% of the average torque. Therefore, many scholars have researched commutation torque ripple suppression from various perspectives, such as modulation, direct torque control, and control circuit topology. Among them, changing modulation methods and direct torque control often prolong the commutation time during high-speed motor operation. In order to achieve fast phase commutation while effectively suppressing commutation torque ripple, this paper proposes a regenerative boost inverter topology and control strategy for torque ripple suppression of wide-speed range.
Firstly, the causes of commutation torque ripple are analyzed in terms of the PWM_ON modulation method generally used for two-phase conduction. Commutation torque ripple can be suppressed by increasing the average value of the bus voltage during commutation to twice that of the previous non-commutation period. Secondly, the relation curve between commutation torque ripple and angular speed shows that the bus voltage cannot be increased further due to the limitation of the power supply voltage. Thus, it cannot effectively suppress the commutation torque ripple when the motor runs at high speed. Therefore, the paper proposes a regenerative boost inverter topology consisting of a switching tube, a diode, an electrolytic capacitor, and a three-phase bridge inverter circuit. When the motor runs in the low-speed range, a smooth motor commutation through pulse width modulation is sufficient. As the bus voltage required for commutation is less than the power supply voltage on the DC side, no electrolytic capacitor is needed to assist in the boost. In this case, the expected value of the electrolytic capacitor voltage should be zero. However, to prevent negative charging of the electrolytic capacitor, the expected voltage value is set to a positive value, smaller than the DC bus voltage. Hysteresis band track control is used for this electrolytic capacitor voltage. When the deviation between the desired and actual value of the electrolytic capacitor exceeds a given positive threshold, consider discharging the electrolytic capacitor. When it is below a given negative threshold, consider charging the electrolytic capacitor. Under higher speeds, the DC power supply needs to be connected in series with the electrolytic capacitor to raise the bus voltage during commutation when the desired value of the electrolytic capacitor is the difference between the four times back-EMF amplitude and the power supply voltage. All the energy of the electrolytic capacitor comes from the regenerative feedback of the motor during non-commutation periods. Finally, the variation of the electrolytic capacitor voltage during a single switching cycle is quantified, and a capacitor selection method is given.
The feasibility and effectiveness of the proposed control strategy are verified by Matlab simulations and DSP drive experiments. According to the experimental results, the commutation torque ripple is 8.6% at 500 r/min and 10.3% when the speed is increased to 2 000 r/min. The results show that the proposed control scheme can provide the higher bus voltage required for the commutation of the motor and thus achieve a fast and smooth commutation over a wide speed range.
keywords:Brushless DC motor (BLDCM), torque ripple, regenerative boost, wide speed range
DOI: 10.19595/j.cnki.1000-6753.tces.230008
中图分类号:TM351
国家自然科学基金资助项目(61873226)。
收稿日期 2023-01-04
改稿日期 2023-02-06
李珍国 男,1973年生,博士,副教授,研究方向为电力电子与电力传动。E-mail: lzg@ysu.edu.cn(通信作者)
韩启萌 男,2000年生,硕士研究生,研究方向为电力电子与电力传动。E-mail: 2639892433@qq.com
(编辑 陈 诚)