 800 kV/8 000 MW的传输容量,本文的研究即基于此背景展开。
800 kV/8 000 MW的传输容量,本文的研究即基于此背景展开。摘要 混合级联直流输电系统兼顾了电网换相换流器(LCC)和模块化多电平换流器(MMC)的优势,具有良好的工程应用前景,但系统逆变侧LCC与MMC间复杂的交直流耦合特性增加了后续换相失败的抑制难度。为此,该文提出了一种应对混合级联系统后续换相失败的协调控制策略。首先,分析了控制器交互期间电气量波动和LCC无功需求对系统恢复产生的不利影响,并在考虑控制器作用和MMC动态无功支撑的基础上建立了多电气量耦合作用下的故障安全域;其次,通过对混合级联系统和基于电网换相换流器的高压直流输电故障安全域对比分析,提出了一种基于MMC和低压限流环节(VDCOL)的协调控制策略,以实现系统后续换相失败抑制和功率快速平稳恢复相协调;最后,基于PSCAD/EMTDC分别在不同严重程度交流故障、不同短路比和不同故障持续时间下进行仿真对比分析,验证了所提协调控制策略的有效性。
关键词:混合级联直流输电系统 后续换相失败 故障恢复期间 故障安全域 协调控制策略
基于电网换相换流器的高压直流输电(Line Commutated Converter based High Voltage Direct Current, LCC-HVDC)因其容量大、成本低、可靠性高等优点,在我国电力传输发展战略中有着极高的地位[1]。然而LCC高度依赖交流电网提供换相电压,当逆变侧发生交流故障时可能发生换相失败,严重危害电力系统安全稳定运行[2-4]。基于全控型电力电子器件的模块化多电平换流器直流输电(Modular Multilevel Converter based High Voltage Direct Current, MMC-HVDC)具有快速控制有功功率和无功功率的能力[5],即使在控制器限幅情况下也能提供与自身容量相当的直流电压和交流电压支撑,不存在换相失败的问题,但MMC-HVDC存在成本大和损耗高等问题,不适合大规模投入运行[6]。
混合级联直流输电继承了LCC-HVDC和MMC-HVDC两种直流输电的优势,成为当前学术研究与工程应用的热点之一[7]。混合级联系统逆变侧采用LCC和MMC级联的结构,当故障发生后MMC可以增发无功功率稳定受端交流母线电压,降低LCC发生换相失败的概率[8]。目前国家电网公司白鹤滩特高压混合级联直流输电工程在世界范围内首次采用混合级联结构,以实现800 kV/8 000 MW的传输容量,本文的研究即基于此背景展开。
针对LCC-HVDC后续换相失败已有较多研究。文献[9-10]研究表明,逆变侧多控制器交互不当可能导致系统发生后续换相失败。文献[11-13]提出了多种动态无功控制策略以实现交直流系统间无功交互平衡。文献[14-15]基于换相失败动态过程分析,分别提出了一种抑制后续换相失败的关断角动态补偿策略和虚拟换相电压策略。文献[16]在保留一定功率裕度的基础上,提出一种抑制系统后续换相失败的控制策略,兼顾实现了换相失败抑制和功率经济运行。文献[17]基于直流受端系统暂态特性分析,提出采用Sigmoid函数代替低压限流环节(Voltage Dependent Current Order Limiter, VDCOL)曲线以改善受端电网暂态电压稳定性。文献[18-19]从换相失败各阶段下系统无功特性出发调节VDCOL参数,改善了系统的恢复特性。文献[20]基于VDCOL临界斜率自适应控制思想,提出了一种自适应直流电流控制策略。文献[21]通过对逆变侧各电气量耦合特性分析,建立使系统安全运行的可行功率域。
针对混合级联系统文献[22]提出一种基于模糊聚类和辨识方法的过电流抑制方法,以缓解换相失败时MMC的过电流现象。文献[23]提出基于直流斩波装置和VDCOL的交流故障穿越策略,可避免MMC的过电压现象。在后续换相失败抑制方面,文献[24]提出一种无功功率调控方法,当系统发生受端交流故障时,通过MMC增发无功功率以抑制LCC后续换相失败。文献[25]研究了逆变侧不同MMC与LCC间的无功功率分配原则,并提出一种抑制后续换相失败的无功功率协调控制策略。文献[26]通过对系统运行能力分析,确定了所选自由变量的安全运行范围,提出一种兼容不同工况的系统运行控制策略。
综上所述,虽然目前针对LCC-HVDC暂态控制策略和可行功率域的研究已取得显著成果,但关于混合级联系统的研究尚处于起步阶段,现有文献大多只单方面考虑了MMC无功支撑作用或改进VDCOL曲线,没有从兼顾无功交互和功率快速恢复的角度提出协调控制策略,缺乏系统安全运行范围和对后续换相失败这一关键问题的深入研究。
针对上述问题,本文基于混合级联系统受端故障恢复期间的暂态特性,量化分析了MMC无功控制对LCC后续换相失败的防御效果和改进VDCOL对功率恢复的影响,提出混合级联系统多电气量耦合作用下的故障安全域和协调控制策略,经PSCAD/EMTDC仿真对比验证了所提控制策略的有效性。结果表明,所提协调控制策略实现了后续换相失败抑制和功率快速平稳恢复相协调,具有一定工程应用价值。
混合级联直流输电系统拓扑如图1所示,本文以正极结构为例进行研究,所得结论同样适用于双极系统。图1中,UG1、Z1分别为送端交流系统等值电动势和等值阻抗;Us1为整流侧交流母线电压,UG2、Z2分别为受端交流系统等值电动势和等值阻抗,Us为逆变侧交流母线电压,Tn为换流变压器(n=1,2,…,5),Bc1、Bc2分别为整流侧和逆变侧交流滤波器等值容纳,R、L分别为直流输电系统线路电阻和电抗。
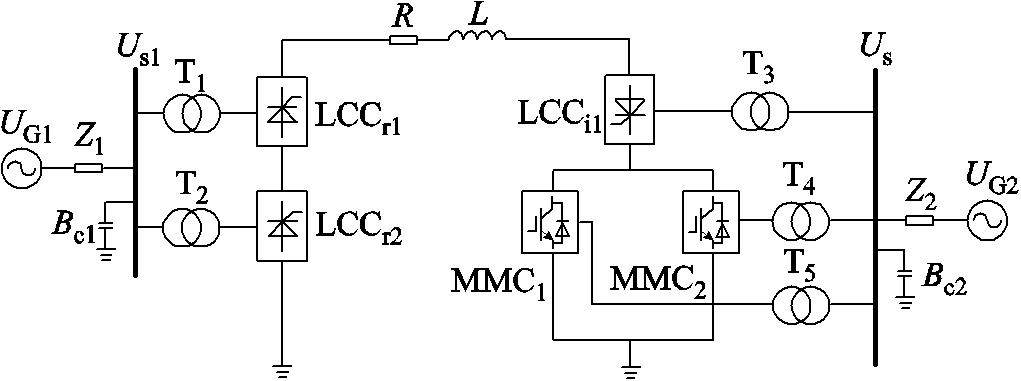
图1 混合级联直流输电系统拓扑
Fig.1 Topology of hybrid cascaded HVDC system
由图1可得混合级联系统逆变侧数学模型为
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
式中,Id为逆变侧直流电流;UdLCC0为LCC空载直流电压;UdLCC为LCC直流电压;N为极对数;PLCC、QLCC分别为LCC发出的有功功率和吸收的无功功率;PMMC1/2、QMMC1/2分别为MMC1/2发出的有功功率和无功功率;Qc为无功补偿装置发出无功功率;Pac、Qac分别为逆变侧与交流系统交换有功功率和无功功率;g、m和b分别为LCC关断角、换相重叠角和越前触发角;j为功率因数角;k为LCC与交流系统间换流变压器电压比;Xr为LCC变压器漏抗。
混合级联系统LCC控制策略如图2所示。其中整流侧LCC配置有定直流电流(Constant Current, CC)控制和最小触发角控制(min-acontroller);逆变侧LCC配置有定直流电流控制和定关断角(Constant Extinction Angle, CEA)控制,并通过电流偏差控制器(Current Error Controller, CEC)实现二者的切换。此外,逆变侧LCC还配置有VDCOL,当受端系统发生交流故障导致逆变侧直流电压Udi骤降时,VDCOL通过限制直流电流指令值以促进LCC换相,加快系统的恢复进程。
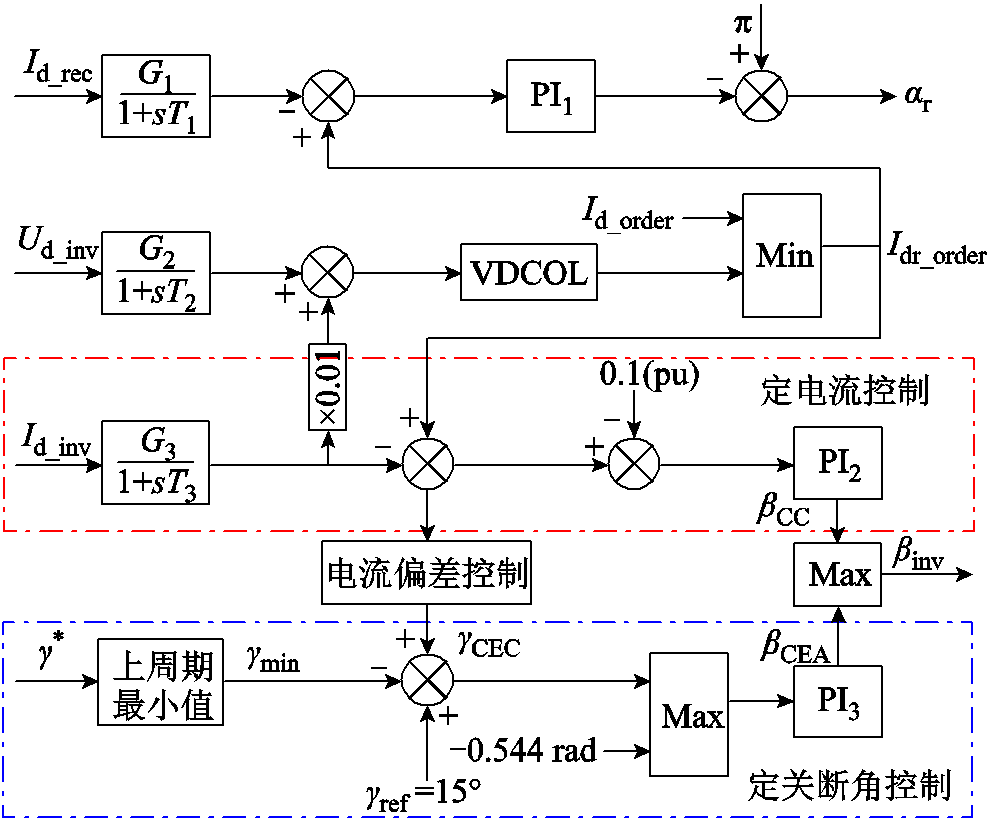
图2 LCC控制策略框图
Fig.2 Control strategy diagram of LCC
图2中,Ud_inv为逆变侧直流电压测量值,Id_order为主控制级电流指令值,Id_rec、Id_inv分别为整流侧和逆变侧直流电流测量值;bCC和bCEA分别为CC、CEA控制输出越前触发角指令值,γ*、γmin和γCEC分别为逆变侧关断角实测值、20 ms内γ*最小值和CEC输出指令值,ar、binv分别为整流侧触发角指令值和逆变侧越前触发角指令值。
混合级联系统MMC采用基于dq轴解耦的直接电流矢量控制,包含外环电压控制和内环电流控制,其控制策略框图如图3所示。外环控制可分为有功外环和无功外环控制,为了保持Udi的稳定,至少需要1个MMC处于定直流电压控制,因此本文2个MMC分别采用定直流电压控制(MMC1)和定有功功率控制(MMC2)作为有功类控制;同时考虑到受端交流电网电压等级及强度,2个MMC均采用定无功功率控制作为无功类控制。内环电流控制根据外环输出直流电压偏差量Uref-Um(有功功率偏差量Pref-Pm1/2)和无功功率偏差量Qref-Qm1/2经过PI环节得到dq轴电流参考值idref和iqref以调节dq轴实际电流值,最终得到MMC出口三相交流电压参考值uref。
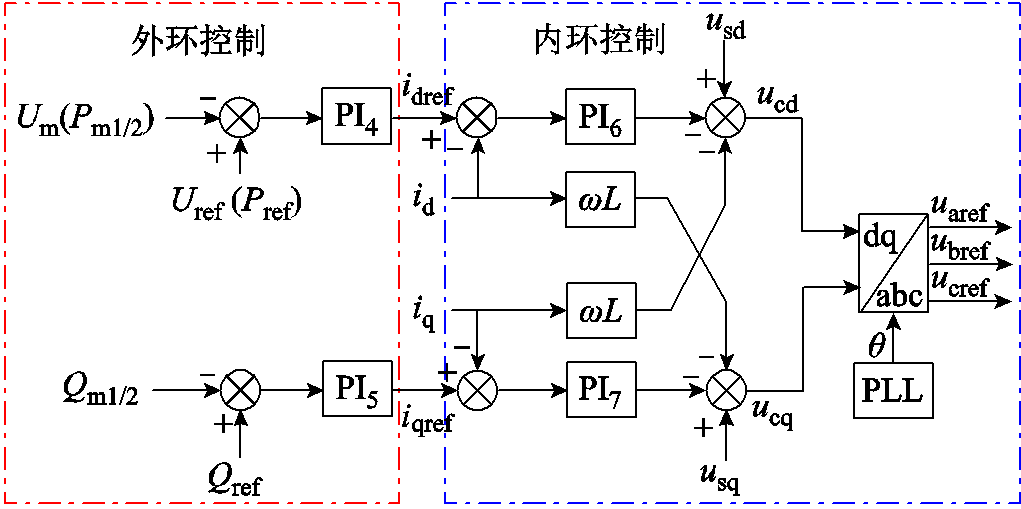
图3 MMC控制策略框图
Fig.3 Control strategy diagram of MMC
当混合级联系统发生交流故障后,受交直流耦合及直流特性影响,在控制器交互期间各电气量变化较为剧烈,可能导致系统在恢复阶段末期发生后续换相失败。因此本节以混合级联系统发生交流故障后逆变侧控制器交互过程为依据划分控制时段,并对各时段电气量波动和LCC无功需求对系统恢复产生的不利影响进行逐一梳理和分析。
从系统发生交流故障至各电气量变化趋于稳定,本节按照控制器交互情况和各电气量变化趋势划分为四个阶段,其中逆变侧控制系统响应过程如图4所示。
1)阶段1(t1~t2):t0时刻受端系统发生交流故障,t1时刻LCC发生首次换相失败,关断角γ跌落至0,Id急剧增大,系统处于CEA控制。在阶段1中相比LCC-HVDC,混合级联系统依靠MMC的无功支撑和稳压作用有效地抑制了Us跌落和Id骤增。
2)阶段2(t2~t3):在整流侧CC控制和VDCOL的共同作用下,Idr_order得到有效抑制,t2时刻Id迅速下降,一旦出现超调现象,CEC启动,同时bCC开始增大。但由于CC控制起步较晚,阶段2中系统仍处于CEA控制。
3)阶段3(t3~t4):系统进入恢复过程,随着Udi逐渐恢复,在VDCOL的作用下t3时刻Id逐渐增大;同时在CEA控制持续动作下γ恢复至稳态值,bCEA骤降,系统切换为CC控制。在阶段3中,相比LCC-HVDC,混合级联系统因其更强的故障抗干扰能力抑制了故障恢复期间Id的波动幅度,加快了系统的恢复速度。
4)阶段4(t4~t5):系统进入恢复阶段末期,Id逐渐向基准值Idref靠拢但仍低于Idr_order。因此在CEC输出降至0前,bCEA保持缓慢增大趋势且bCC不断降低,t4时刻系统切换为CEA控制。在阶段4中,随着Id恢复至基准值,Qac和Pac进入恢复过程并逐渐向稳态值趋近。
基于上述对混合级联系统4阶段控制器交互和各电气量变化趋势的分析过程,可得出以下结论:
1)由式(10)可得,自阶段3开始的Id恢复过程会造成µ快速增大进而导致γ不断降低,增大了系统发生后续换相失败的风险。
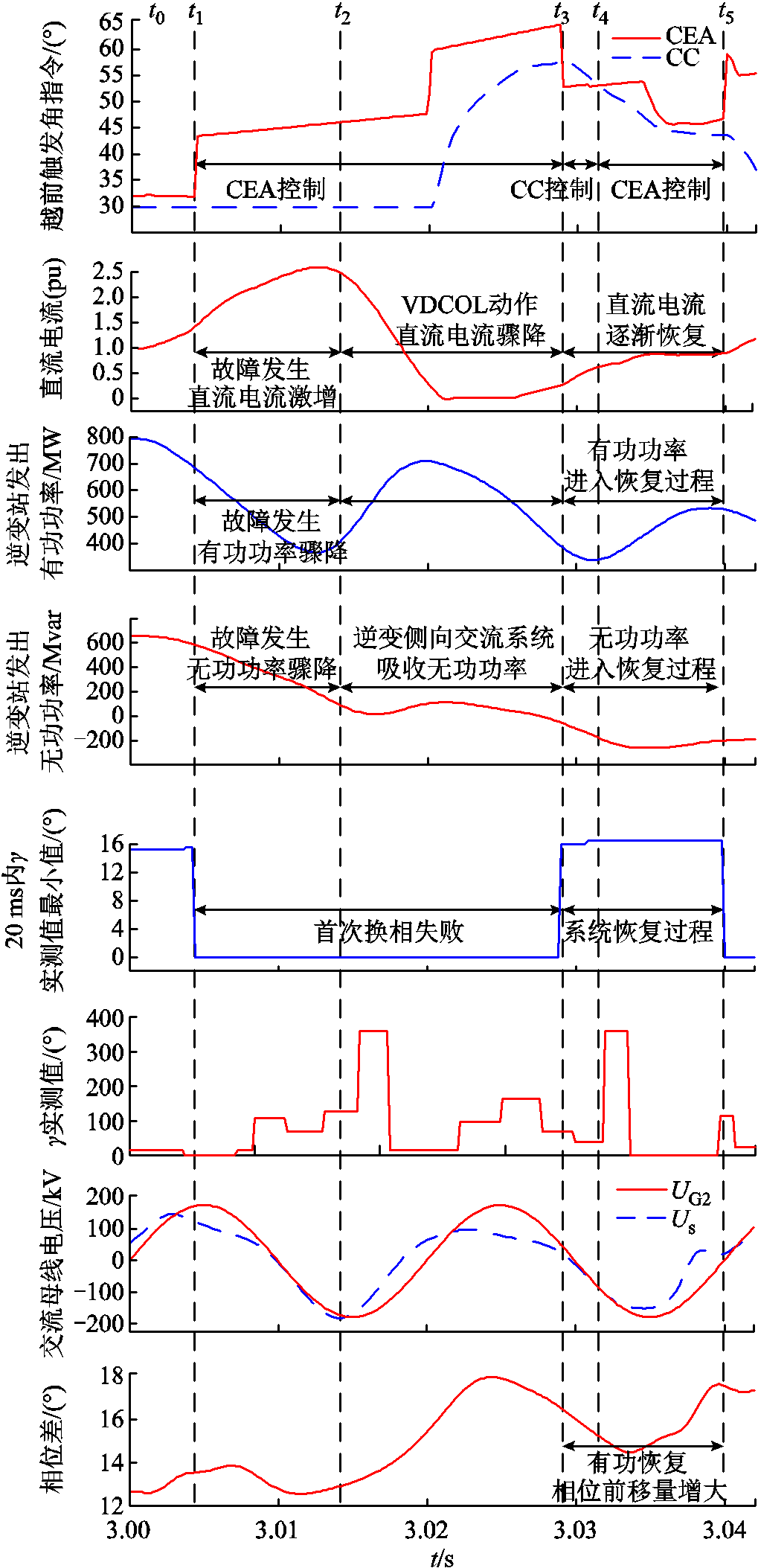
图4 逆变侧控制系统响应过程
Fig.4 Response of inverter control system
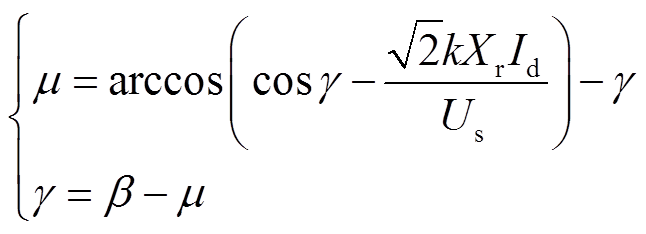 (10)
(10)
2)在阶段3中,随着Id逐渐恢复,γCEC不断降低,因此系统处于CC控制持续时间越长,当控制器切换时,binv越小。此外当系统切换为CEA控制时,由于Id仅受整流侧控制将快速提升至Idr-order,同时CEC输出降至0,这会导致binv进一步降低。因此在系统恢复阶段无论处于何种控制方式,binv都处于较低水平且有不断降低的趋势,这同样会导致γ跌落。
3)当首次换相失败结束后,Pac开始恢复,但由式(11)可得,Pac增大会导致Us相位前移,直接压缩了关断角裕度,可能导致系统发生后续换相失败[27]。
 (11)
(11)
式中,d为Us相对于UG2的相位偏移量;XG为受端联络线等值电抗;P为系统进入恢复阶段时汇入交流电网总有功功率;ΔP为系统恢复期间有功功率的变化量。由于受端交流电网一般等值为理想电压源和等值阻抗的串联组合,因此可将UG2、XG视为定值。
此外由于在高压直流输电中X R,即电压降落的横分量主要取决于有功功率,而相位差又主要由电压降落的横分量决定,因此传输到受端电网有功功率的变化量ΔP直接决定了Us的相位偏移,是产生相位前移量δ的主要影响因素。系统故障恢复期间受端交流电压与相位差关系如图4所示。
R,即电压降落的横分量主要取决于有功功率,而相位差又主要由电压降落的横分量决定,因此传输到受端电网有功功率的变化量ΔP直接决定了Us的相位偏移,是产生相位前移量δ的主要影响因素。系统故障恢复期间受端交流电压与相位差关系如图4所示。
4)CEA控制对Id的响应是通过减小CEC输出量进而降低bCEA实现的。因此在阶段4中逆变侧对Id的响应速度明显滞后于整流侧,由式(12)可得,这会导致在系统恢复期间Udi无法及时跟踪Udr,造成送受端压差变大,Id超出基准值,QLCC逐渐增大。
 (12)
(12)
式中,Udr为整流侧直流电压;Lr和Li分别为整流侧和逆变侧平波电抗器的电感。
由2.1节分析可得,在控制器交互期间电气量大幅波动会导致LCC产生较大无功需求。当QLCC与系统恢复过程不匹配时,将会恶化受端电网暂态稳定性,使得逆变侧整体无功功率损耗不断增大,对外持续呈现“无功负荷”特性。为满足逆变侧无功功率缺额,LCC将不断从交流系统吸收大量的无功功率,可能导致系统在恢复阶段末期发生后续换相失败。为进一步研究LCC的无功功率特性,进一步代入式(7)可得逆变侧LCC消耗的无功功率为
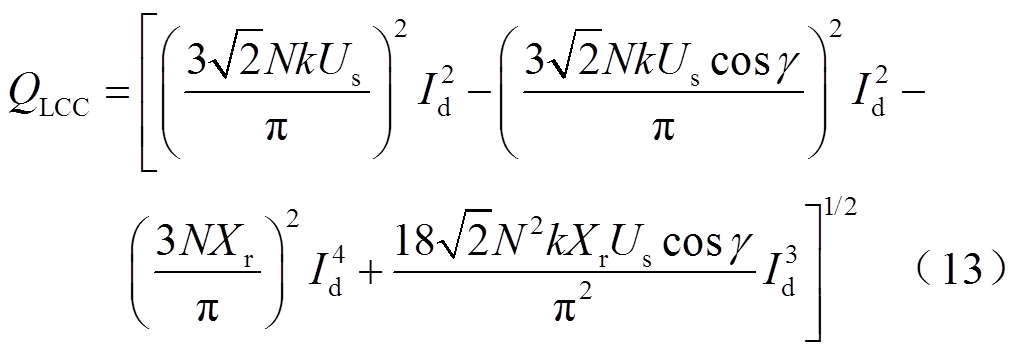
式(13)表征了混合级联系统逆变侧直流准稳态模型中QLCC与Us、Id和γ间的内在联系。为进一步探究QLCC随Id和γ的变化趋势,分别求解QLCC对Id和γ的偏导数为
其中
式中,k、Xr、N均为常数,代入CIGRE标准模型控制参数,并考虑交直流系统参数标幺化,可得不同交流电压和直流电流下QLCC关于Id和γ的偏导数如图5所示。
图5 无功功率关于直流电流、关断角的偏导数
Fig.5 Partial derivatives of QLCC with respect to Id and γ
由图5可得,在不同交流电压和直流电流下无功功率关于Id和γ偏导数均大于0,说明QLCC随Id和γ的增大而增加。此外为深入研究系统恢复期间VDCOL动作与否对QLCC和Id的影响,本文分别选取VDCOL作用和不作用两种工况进行仿真分析,对比情况如图6所示。当考虑VDCOL作用时,Id和QLCC的增幅程度均小于不考虑VDCOL时的工况,因此在VDCOL的作用下系统可以更加平稳地恢复至稳定运行状态,避免直流电流快速恢复导致系统恢复期间LCC无功需求持续增大。
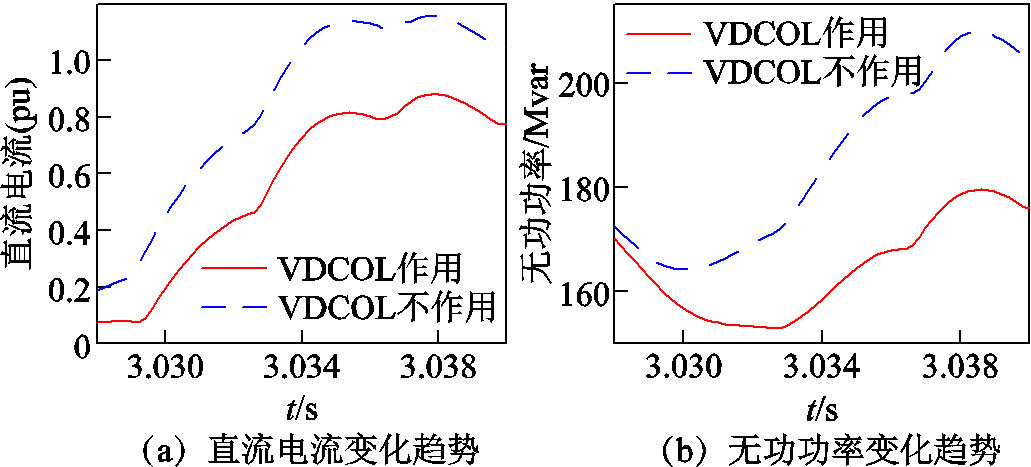
图6 VDCOL控制对直流电流和无功功率的影响
Fig.6 The influence of VDCOL control on Id and QLCC
基于上述分析,当考虑VDCOL控制时,系统恢复期间电流指令值随着Udi的恢复线性增加,直流电流增幅缓慢,对应图5a黑色虚线左侧紫色区域(0.1(pu)~0.8(pu));当未考虑VDCOL控制时,直流电流指令值不受Udi限制,始终为Id_order,加快了Id的恢复速度,对应整个图5a区域(0.1(pu)~1 (pu)),即VDCOL通过控制电流指令值,减小了无功的需求量。
混合级联系统恢复阶段多电气量间复杂的耦合特性是导致系统后续换相失败难以有效抑制的关键因素。因此有必要建立混合级联系统逆变侧LCC在多电气量耦合作用下的故障安全域,确定系统在故障恢复期间的安全运行范围。
混合级联系统拓扑结构较为复杂,逆变侧LCC与MMC相互耦合,增加了后续换相失败抑制难度。当系统发生交流故障后,交流母线电压变化量ΔUs与逆变侧和交流系统间交换的暂态无功功率ΔQ有关,具体关系为
 (16)
(16)
式中,SCR为受端交流系统短路比;ΔQ>0代表逆变侧向受端交流系统发出无功功率。
由式(16)可得,混合级联系统可以充分发挥MMC动态无功支撑和稳压作用,通过在故障期间快速增发无功以持续满足LCC无功需求。考虑MMC无功支撑作用的交流母线电压Us与系统初始交流母线电压Us0和MMC无功增发量ΔQMMC间的关系为
 (17)
(17)
由式(17)可将PLCC和QLCC重新表示为
 (18)
(18)
其中
由式(18)可得PLCC、QLCC分别与Us、Id、γ的耦合特性如图7所示。减小Id会降低QLCC,有利于Us恢复,但不利于PLCC传输;增大Id有利于PLCC快速恢复,但会使QLCC增大,不利于Us恢复。因此有必要确定系统在多电气量约束下的可行功率域,并通过设置相应控制策略加快系统的恢复进程。
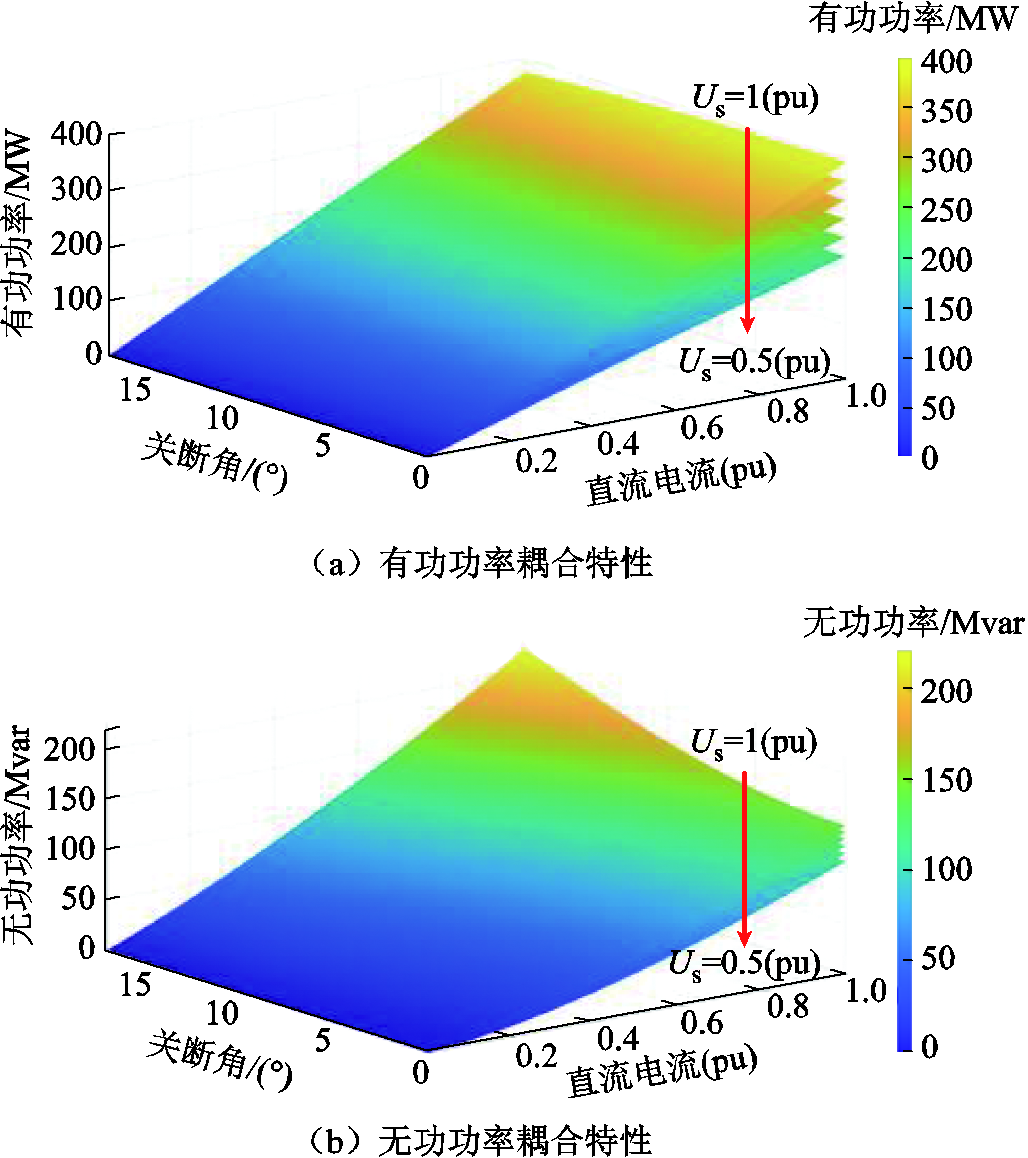
图7 逆变侧电气量耦合特性
Fig.7 Coupling characteristics of electrical quantities of inverter station
由2.1节分析可得,当系统处于恢复阶段末期CEA控制时,易发生后续换相失败。因此,在考虑控制器作用前提下,以系统恢复阶段末期为分析时段建立逆变侧LCC故障安全域,即可确定混合级联系统的安全运行范围。CEA控制指令值[20]可表示为
 (19)
(19)
式中,Kp、Ki分别为CEA控制PI环节比例增益和积分增益;γref为系统稳态时关断角参考值。
当故障发生后,CEA控制通过动态调整b以增加γ裕度,对式(19)求导可得
 (20)
(20)
db/dt可等效变换为
 (21)
(21)
在系统恢复期间,关断角随时间的变化量dγ/dt可近似为kγ,将式(20)代入式(21)可得
 (22)
(22)
对式(22)积分运算即可得到b关于γ的表达式为
 (23)
(23)
式中,C为积分常数,可在系统稳态运行时确定。
因此考虑CEA控制效果后UdLCC可表示为
 (24)
(24)
当系统进入恢复阶段LCC恢复正常换相时,系统准稳态方程成立,因此式(5)适用于系统首次换相失败后的恢复过程。将式(24)代入式(5)即可得到Id关于PLCC的两个解,有
 (25)
(25)
由于Id2恒小于0,不满足系统实际运行情况应舍去,因此Id1为直流电流的可行解。将Id1代入式(13)中即可得到
其中
同时为了确定故障安全域的边界线和极值功率运行点,分别求解PLCC对Id和γ的偏导数为
 (27)
(27)
式中,k、Xr、N均为常数,代入系统控制参数可得PLCC与Id成正比,与γ成反比。PLCC随着Id的增大而增大,但较大的有功传输却对应着较小的γ。因此还需确定确保系统安全运行的Id和γ的取值范围。
首先γ应满足
 (28)
(28)
式中,γ0为系统不发生后续换相失败的临界关断角,一般为7°;γref一般为15°~18°。将γ0和γref分别代入式(26)即可得到两条边界故障安全线。
其次Id应大于或等于最小限制值Idmin,考虑到当系统进入阶段4时Id大于VDCOL输出电流下限值IdL,综合选取最小直流电流边界Idmin=0.55Idref;此外Id还应存在上限,以保证换流阀的安全运行。由换相电压时间面积理论可得,避免LCC发生后续换相失败的最大直流电流限值Idmax为
 (29)
(29)
考虑到故障发生后β持续增大,逆变侧触发角a低于稳态值aref,综合选取式(29)中a=0.9aref以提高最大直流电流边界准确度。因此Id应满足
 (30)
(30)
在上述Id和γ约束下,PLCC和QLCC应满足
 (31)
(31)
式中,PLCCmax、PLCCmin和QLCCmax、QLCCmin分别为在某一确定Us和Id、γ二者约束下LCC发出有功功率和吸收无功功率的最大值和最小值。由上文偏导关系,上述极值可表示为
 (32)
(32)
基于上述分析,将改进的CIGRE HVDC标准测试模型参数、关断角和直流边界条件分别代入式(26),即可得到混合级联系统故障恢复期间LCC不发生后续换相失败的安全运行区域如图8所示。
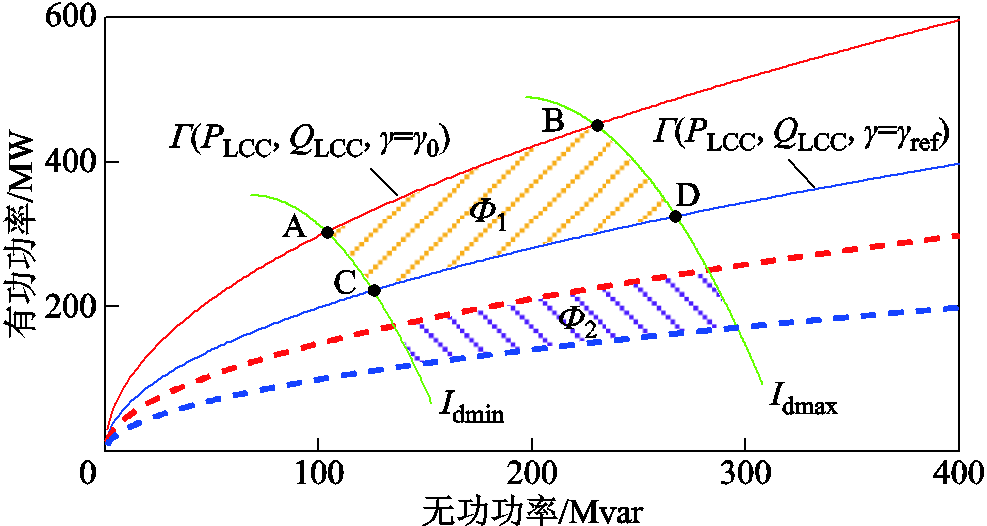
图8 逆变侧故障安全域
Fig.8 Fault security region of inverter station
区域Ф1和Ф2分别代表混合级联系统在发生不同严重程度交流故障下逆变侧LCC不发生后续换相失败的可行功率域,其中区域Ф2所对应的交流母线电压跌落程度更严重,故障安全域出现整体下移;曲线AB、CD分别代表系统发生较轻微故障下 和γ=γref对应的边界故障安全线;B、C点分别为LCC发出有功的最大值和最小值运行点;A、D点分别为LCC吸收无功的最大值和最小值运行点。
和γ=γref对应的边界故障安全线;B、C点分别为LCC发出有功的最大值和最小值运行点;A、D点分别为LCC吸收无功的最大值和最小值运行点。
为了深入研究混合级联系统和LCC-HVDC在发生相同严重程度故障下安全域的区别和特征,本文从两系统恢复期间电气量差异出发,进行故障安全域的对比分析。
由于3.2节所建立的安全域为在考虑MMC无功支撑和控制器交互的基础上逆变侧LCC故障恢复期间不发生后续换相失败的可行功率域,因此在不考虑MMC附加控制效果的前提下,两系统在建域思路和准稳态公式推导上保持一致,均可得到式(26)。但由式(12)、式(16)可得,相比于LCC-HVDC,混合级联系统由于其逆变侧MMC稳压和无功支撑作用抑制了故障初期Id激增和Us的跌落幅度,并加快了系统恢复期间Id的恢复速度。为验证上述理论分析的正确性,体现混合级联系统故障恢复期间区别于LCC-HVDC的电气量变化特征和边界条件,本文在相同严重程度交流故障下针对两系统分别进行了仿真对比分析,其中Id和Us波形对比如图9所示。
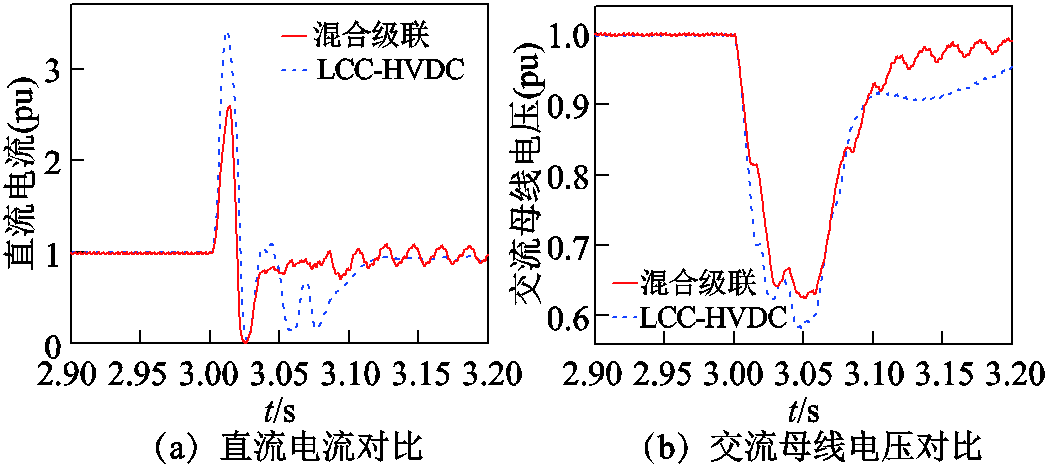
图9 混合级联系统和LCC-HVDC电气量对比
Fig.9 Comparison of electrical quantities between hybrid cascaded system and LCC-HVDC
如图9所示,混合级联系统在故障恢复期间具有更高的Id和Us,因此两系统存在不同的安全域边界。基于上述分析,将满足式(28)、式(30)的两系统边界条件以及改进的CIGRE HVDC标准测试模型参数代入式(26)即可得到混合级联系统和LCC-HVDC故障恢复期间安全域对比结果,如图10所示。图10中,Ф3、Ф4分别为混合级联系统和LCC-HVDC故障恢复期间的安全域。
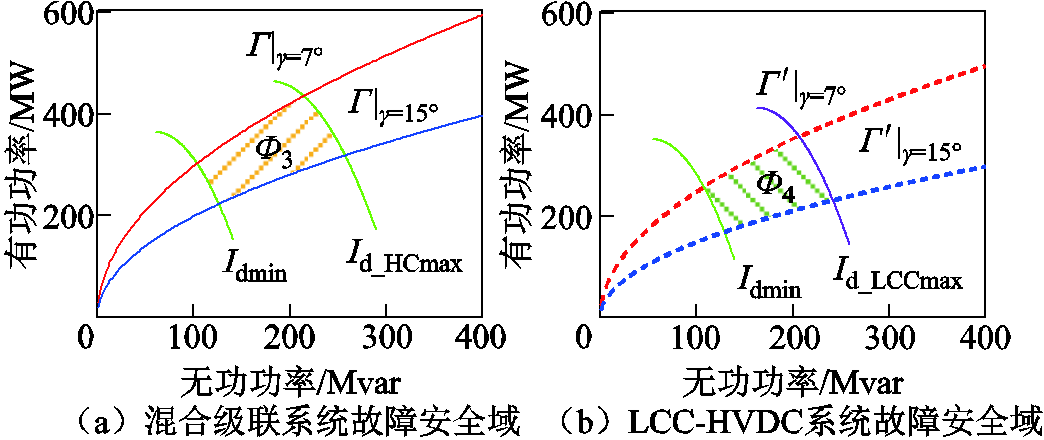
图10 混合级联系统与LCC-HVDC故障安全域对比结果
Fig.10 Comparison results of FSR between hybrid cascaded HVDC system and LCC-HVDC
由图10可得,混合级联系统相比LCC-HVDC具有更强的故障抵御能力和更小的电气量波动情况,实现了故障安全域的整体上移;同时在较高的Us下混合级联系统具有更高的直流电流边界条件,进而在故障恢复期间具备更大的功率恢复潜力。
当系统发生交流故障后,独立的MMC和VDCOL控制无法兼顾实现后续换相失败抑制和功率快速恢复,有必要基于故障安全域提出相应的协调控制策略,在保证系统安全运行的前提下,动态调整VDCOL曲线上移系统运行点,增大功率传输。
混合级联系统协调控制策略如图11所示。系统可以充分发挥MMC动态无功支撑能力以抑制LCC后续换相失败发生;此外,由于现有暂态控制难以实现系统故障恢复期间功率快速恢复的要求,结合3.2节故障安全域的建模分析可知,可以通过系统实际有功传输量和理想最大有功传输量的差值动态调节VDCOL曲线,加快Id恢复,使得系统运行点在协调控制策略的作用下不断向故障安全域靠拢,并通过MMC持续满足由于运行点上移而产生的无功需求,最终实现系统后续换相失败抑制和功率快速平稳恢复相协调。
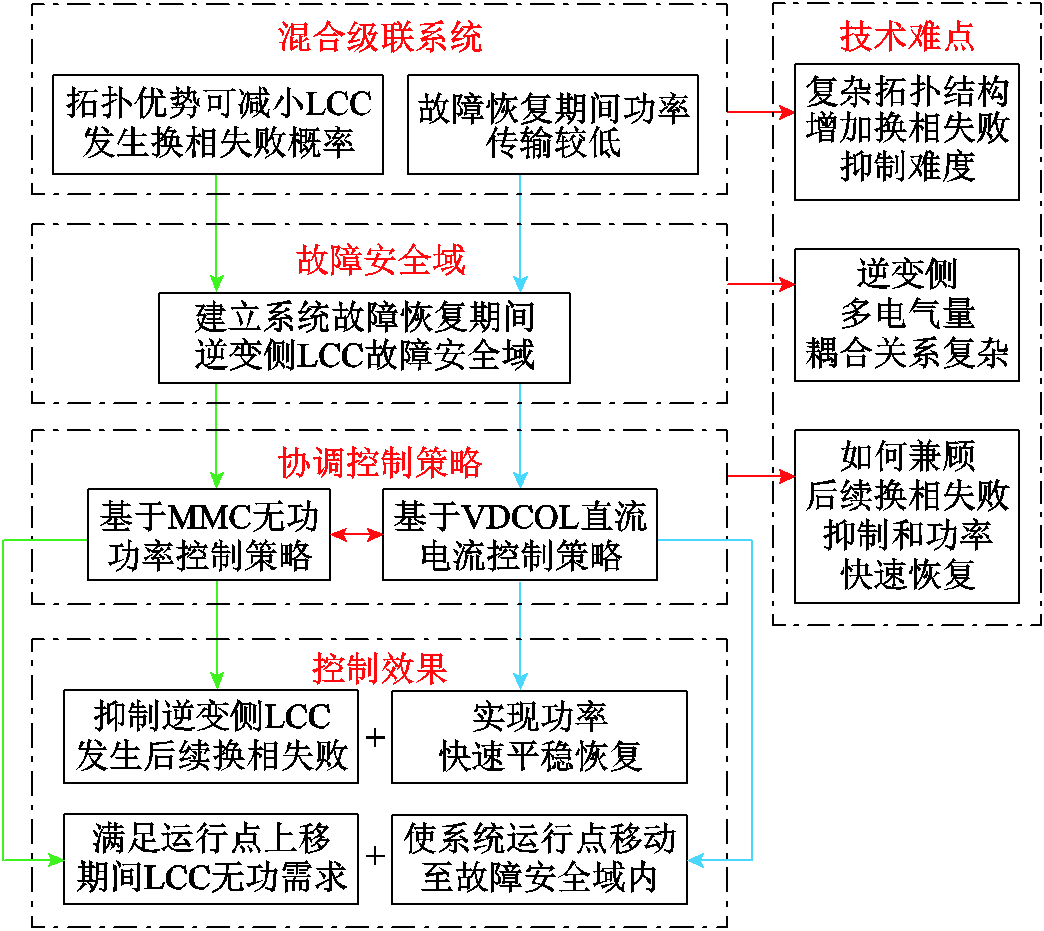
图11 混合级联系统协调控制策略
Fig.11 Coordinated control strategy of hybrid cascaded HVDC system
当系统发生首次换相失败后,为抑制LCC发生后续换相失败,避免因Us持续跌落引起的故障安全域整体下移,本节提出基于附加关断角和直流电流的MMC无功功率控制策略,其控制结构如图12所示。其原理为测量逆变侧LCC的γ和Id相较于基准值的偏差量Δγ和ΔId,并通过PI环节将其补偿至MMC无功外环,以逆变侧向受端交流系统尽可能发出容性无功即Qac>0为目标,提高故障期间MMC发出的无功功率,避免LCC从原本动态无功资源紧缺的交流系统吸收过多无功并给其他响应速度较慢的无功资源如Qc争取恢复时间,从而降低LCC发生后续换相失败的概率。
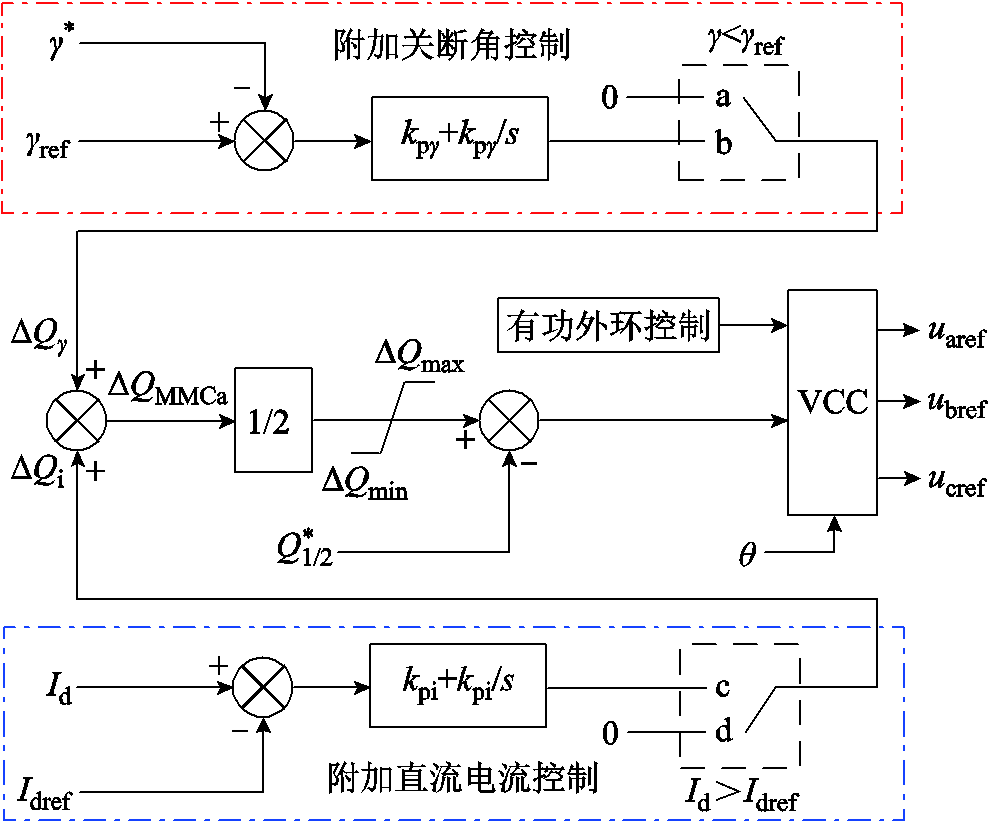
图12 MMC无功功率控制策略框图
Fig.12 Block diagram of MMC reactive power control strategy
对于附加关断角控制,其无功补偿量ΔQγ[25]可表示为
 (33)
(33)
式中,kpγ、kiγ分别为附加关断角控制PI环节比例增益和积分增益。当判断环节检测到γ<γref时,投入附加关断角控制策略,并将ΔQγ附加至MMC无功外环控制;否则,不投入。
对于附加直流电流控制,其基本原理同附加关断角控制一致,基于ΔId的无功补偿量ΔQi为
 (34)
(34)
式中,kpi、kii分别为附加直流电流控制PI环节比例增益和积分增益。当发生交流故障后,Id骤增导致QLCC增大,因此设置判断环节,当Id>Idref时,投入附加直流电流控制策略,否则不投入。
但考虑到MMC换流器的视在功率SMMC一定,随着MMC持续动作,QMMC增大,PMMC也会随之降低,从而在宏观上影响逆变站功率传输。所以,MMC所增发无功应在满足LCC无功需求的同时尽可能降低对有功传输的影响。因此本节基于MMC无功控制策略的总无功增发量ΔQMMCa可表示为
 (35)
(35)
此外,当系统采用上述无功控制策略后,MMC持续动作可能存在无功越限的风险,因此需要在MMC无功外环设置限幅环节,限制其无功发出量在自身容量范围内不越限并维持MMC最小有功功率传输,在保证MMC安全运行的前提下持续提供暂态无功支撑。
混合级联系统基于VDCOL的直流电流控制策略流程如图13所示。在投入4.2节无功控制策略后,MMC快速动作有效地满足了故障恢复期间LCC无功需求,保证了系统的安全运行。为了进一步增大故障恢复期间系统功率传输,本节提出了一种直流电流控制策略:通过动态调整VDCOL曲线以加快Id恢复速度,使系统运行点向最大功率传输点靠拢,同时延长MMC动作时间以满足由于运行点上移而产生的LCC无功需求,在保证系统不发生后续换相失败的前提下兼顾实现功率快速平稳恢复。其运行点变化趋势如图14所示,具体计算步骤如下。
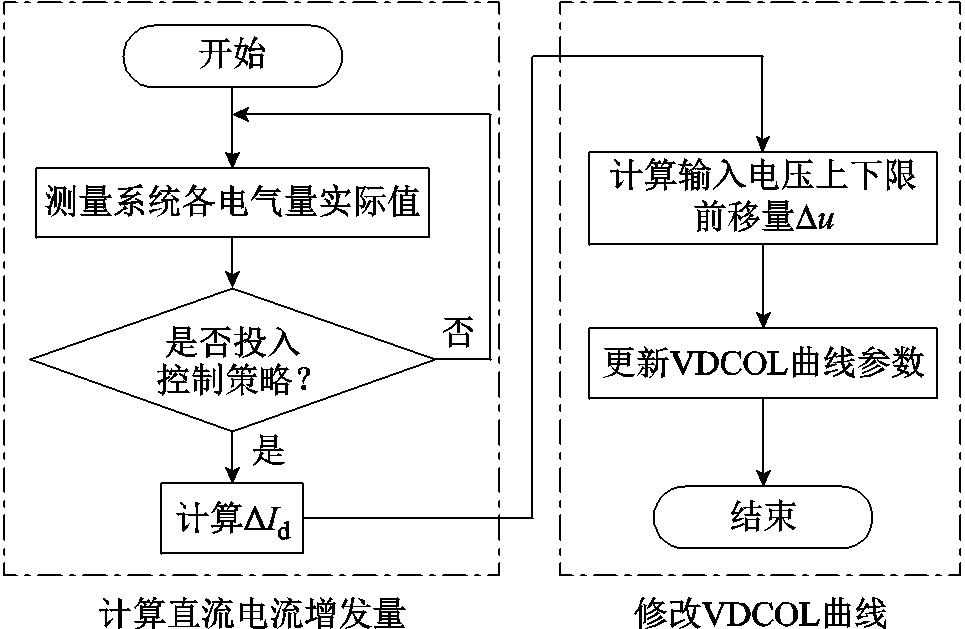
图13 基于VDCOL的直流电流控制策略流程
Fig.13 Flow chart of DC current control strategy based on VDCOL
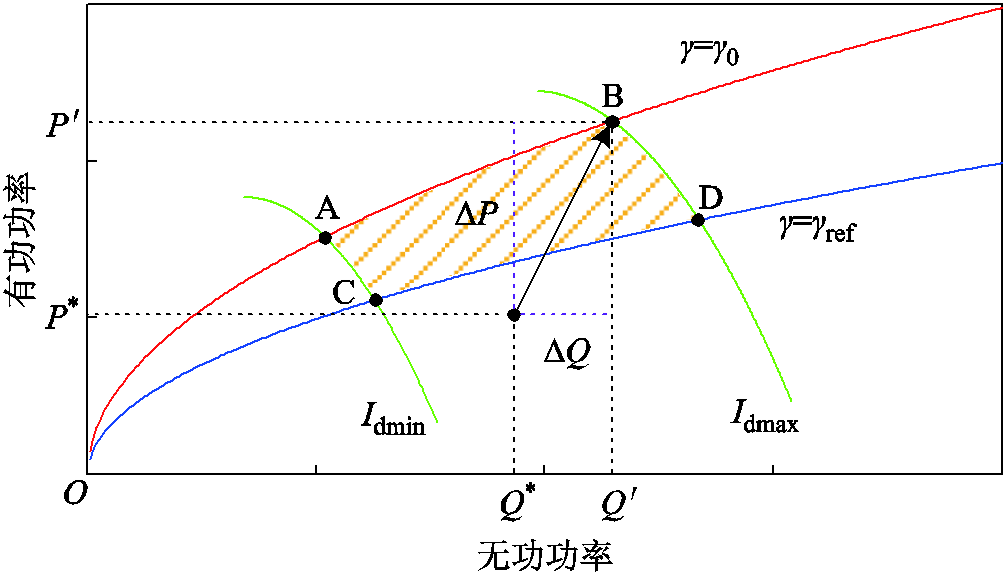
图14 逆变侧系统运行点变化趋势
Fig.14 Trend changes in system operating points of inverter station
1)当系统进入恢复阶段初期,γ>γref,实际运行点(P*,Q*)不在故障安全域内,同时在故障发生后VDCOL的持续作用下Id<Idref,PLCC低于额定值且距离稳态功率运行点较远。因此设置判断环节,当Id<Idref时确认系统进入恢复阶段,投入控制策略,上移系统运行点。
2)由式(27)偏导关系可得系统理想最大有功功率传输值 =f(Idmax,γmin),由此计算有功差值ΔPLCC为
=f(Idmax,γmin),由此计算有功差值ΔPLCC为
 (36)
(36)
式中, 为理想最大有功功率对应的LCC直流电压;
为理想最大有功功率对应的LCC直流电压; 和
和 分别为系统实际运行点对应的LCC直流电压和直流电流。
分别为系统实际运行点对应的LCC直流电压和直流电流。
3)由式(36)可得Id增发量ΔId为
 (37)
(37)
随着Id增大,运行点上移,PLCC逐渐趋于目标功率值并最终恢复至稳态值。
4)考虑到VDCOL输入直流电压上、下限UdH、UdL决定了低压限流环节的动态性能,电压上、下限取值过高或过低均不利于系统的恢复。为维持系统暂态期间的稳定性,本文在保持原VDCOL曲线斜率kv不变的前提下,实时计算输入电压上、下限前移量Δu=ΔId/kv,在不改变上、下限差值的前提下加快Id的恢复速度。混合级联系统改进VDCOL特性曲线如图15所示。
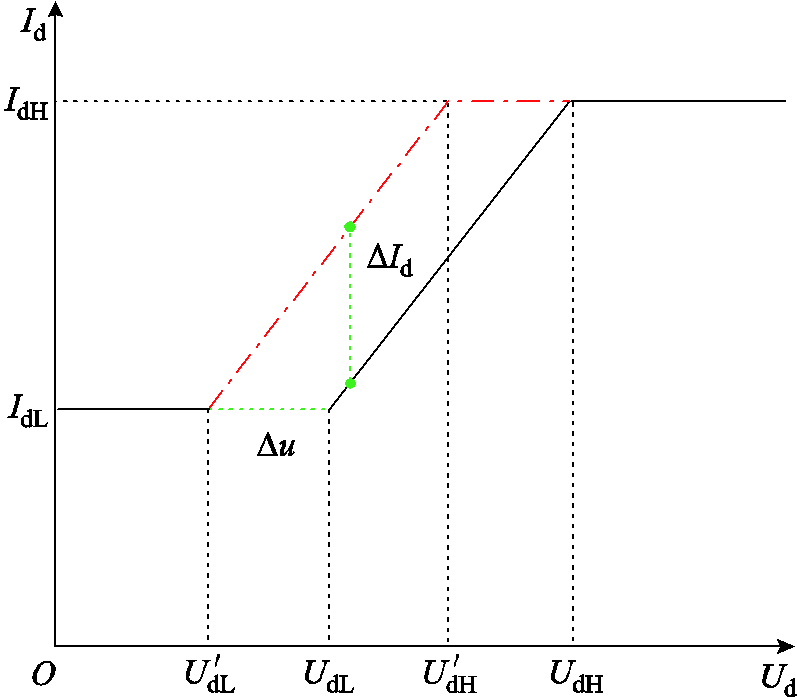
图15 改进VDCOL特性曲线
Fig.15 Improving VDCOL characteristic curve
由图15可得,在相同的Udi恢复过程中,修改后的VDCOL曲线(红色点画线)Id恢复速度更快。此外,虽然4.3节控制目标为增大系统恢复期间功率传输,但直流电流控制策略的投入必然导致QLCC增大。系统运行点上移过程中LCC产生的新无功需求 可表示为
可表示为
 (38)
(38)
为避免LCC因运行点上移而产生的无功消耗过大,从而导致系统发生后续换相失败,本节在MMC无功外环附加控制策略延长MMC动作时间:当Id<Idref时,确认系统进入恢复阶段,投入附加MMC控制策略,协调配合基于VDCOL的Id控制策略所产生的LCC无功需求。MMC延长动作时间所增发无功ΔQMMCb可表示为
 (39)
(39)
由式(39)可得,在投入直流电流控制策略增大PLCC的同时,MMC增发无功补偿量ΔQMMCb进一步满足LCC无功需求,避免Us在故障恢复期间发生二次跌落,降低了系统发生后续换相失败的风险。
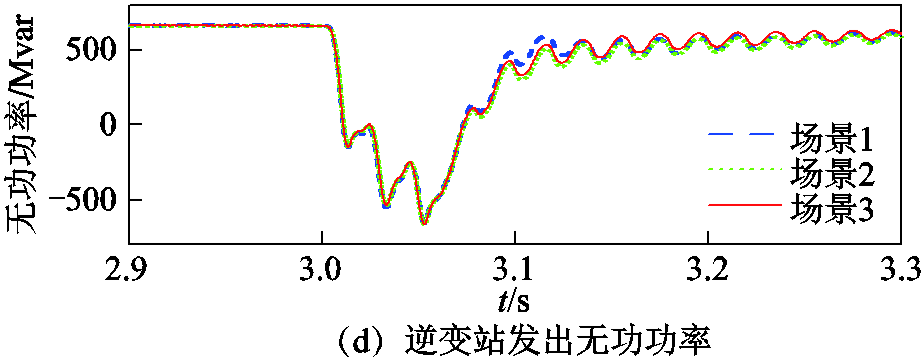
为验证所提出协调控制策略的有效性,本文在PSCAD/EMTDC中搭建混合级联直流输电系统仿真模型,系统主要参数见表1。下文针对逆变侧发生不同严重程度交流故障对所提协调控制策略进行仿真验证,并同时设置以下三个场景:场景1不投入控制策略;场景2投入文献[28]中附加关断角控制策略;场景3投入协调控制策略。各算例其余电气量波形如附图2~附图5所示。
表1 混合级联直流输电系统主要参数
Tab.1 Main parameters of hybrid cascaded HVDC system
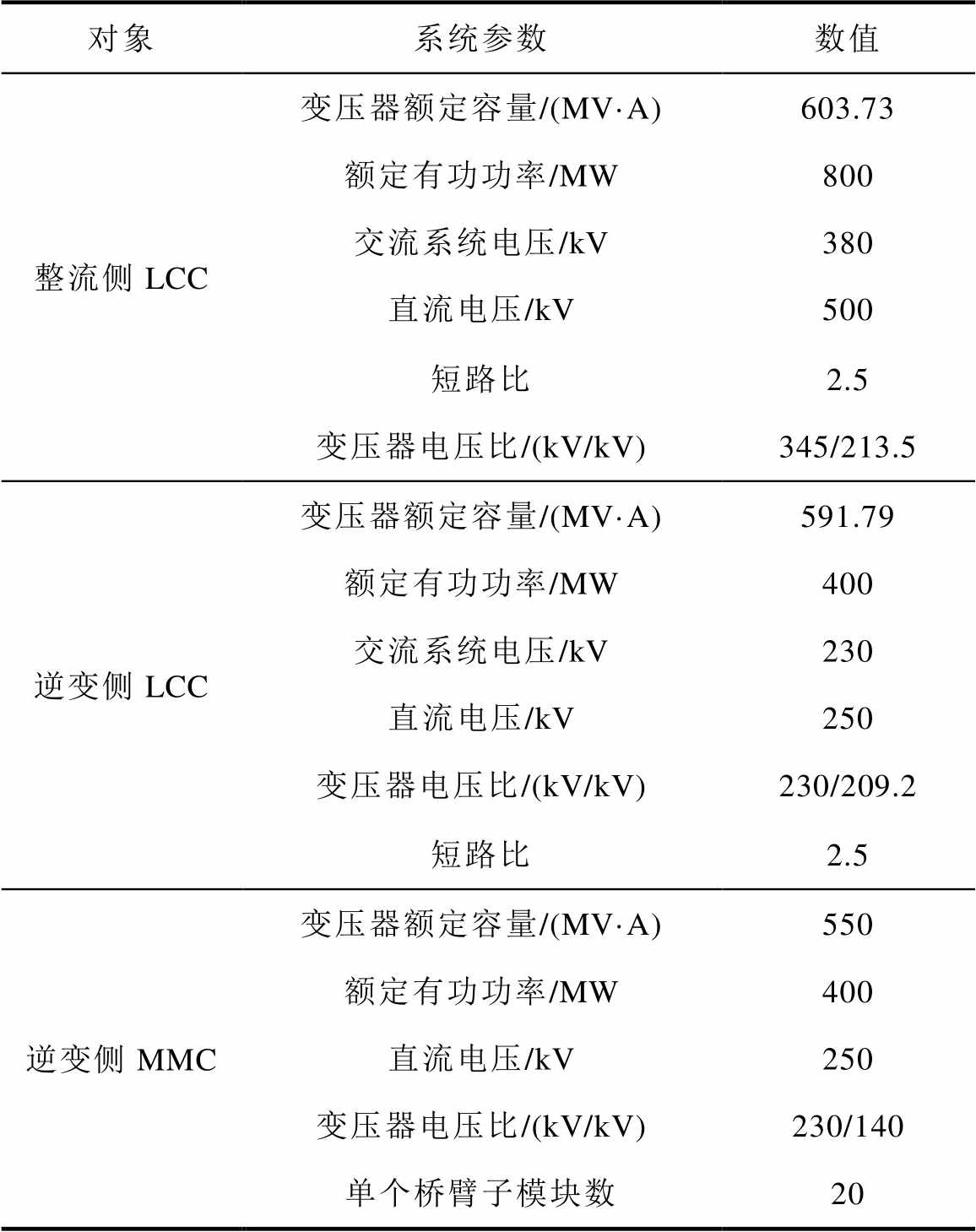
对象系统参数数值 整流侧LCC变压器额定容量/(MV·A)603.73 额定有功功率/MW800 交流系统电压/kV380 直流电压/kV500 短路比2.5 变压器电压比/(kV/kV)345/213.5 逆变侧LCC变压器额定容量/(MV·A)591.79 额定有功功率/MW400 交流系统电压/kV230 直流电压/kV250 变压器电压比/(kV/kV)230/209.2 短路比2.5 逆变侧MMC变压器额定容量/(MV·A)550 额定有功功率/MW400 直流电压/kV250 变压器电压比/(kV/kV)230/140 单个桥臂子模块数20
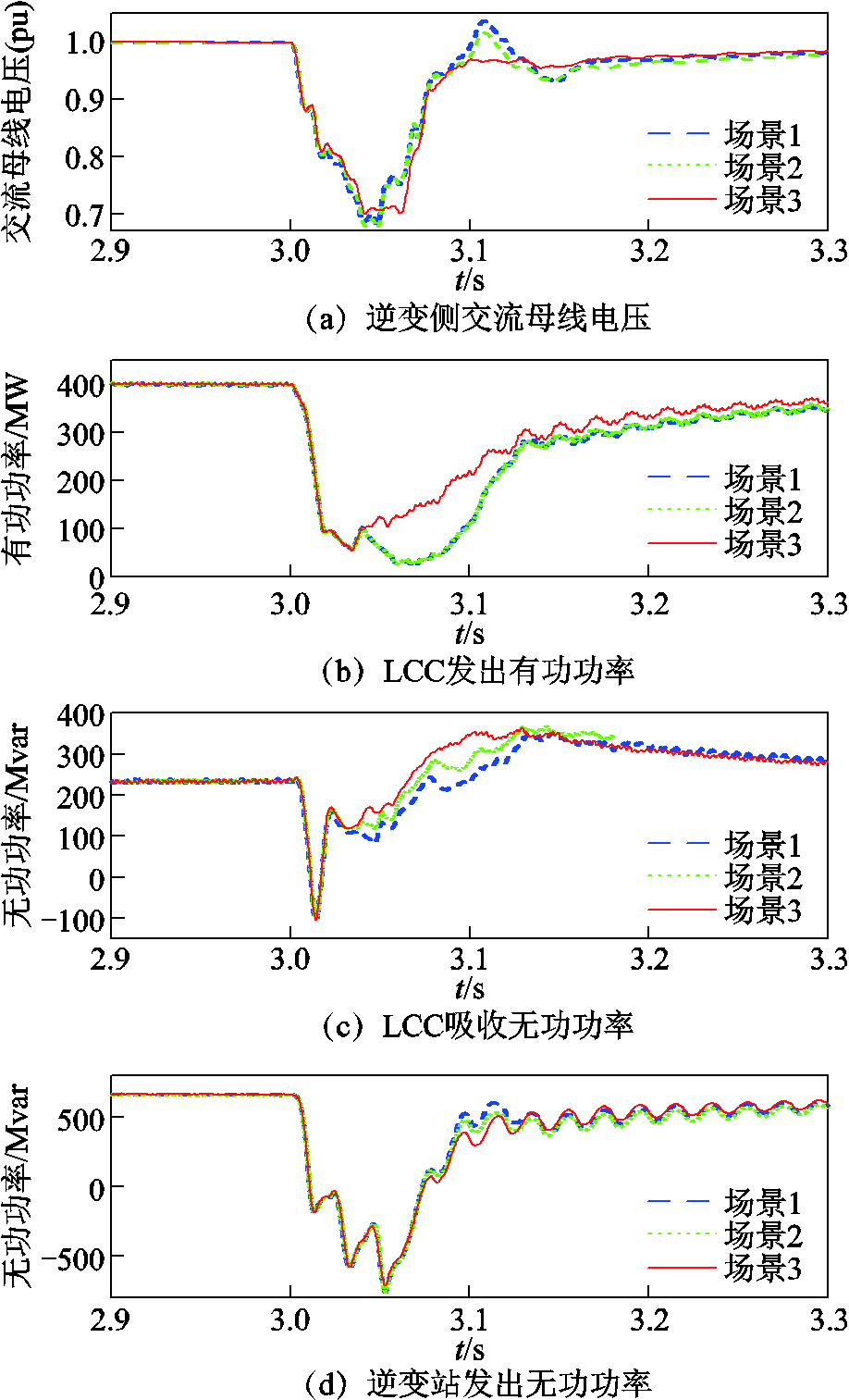
首先对混合级联系统逆变侧发生三相接地故障时进行仿真分析。故障发生时刻为3 s,接地故障电感分别设置为0.13 H(较轻微故障)和0.12 H(较严重故障),故障持续时间为0.05 s 。图16、图17分别为三相故障下上述三种场景系统暂态特性对比。
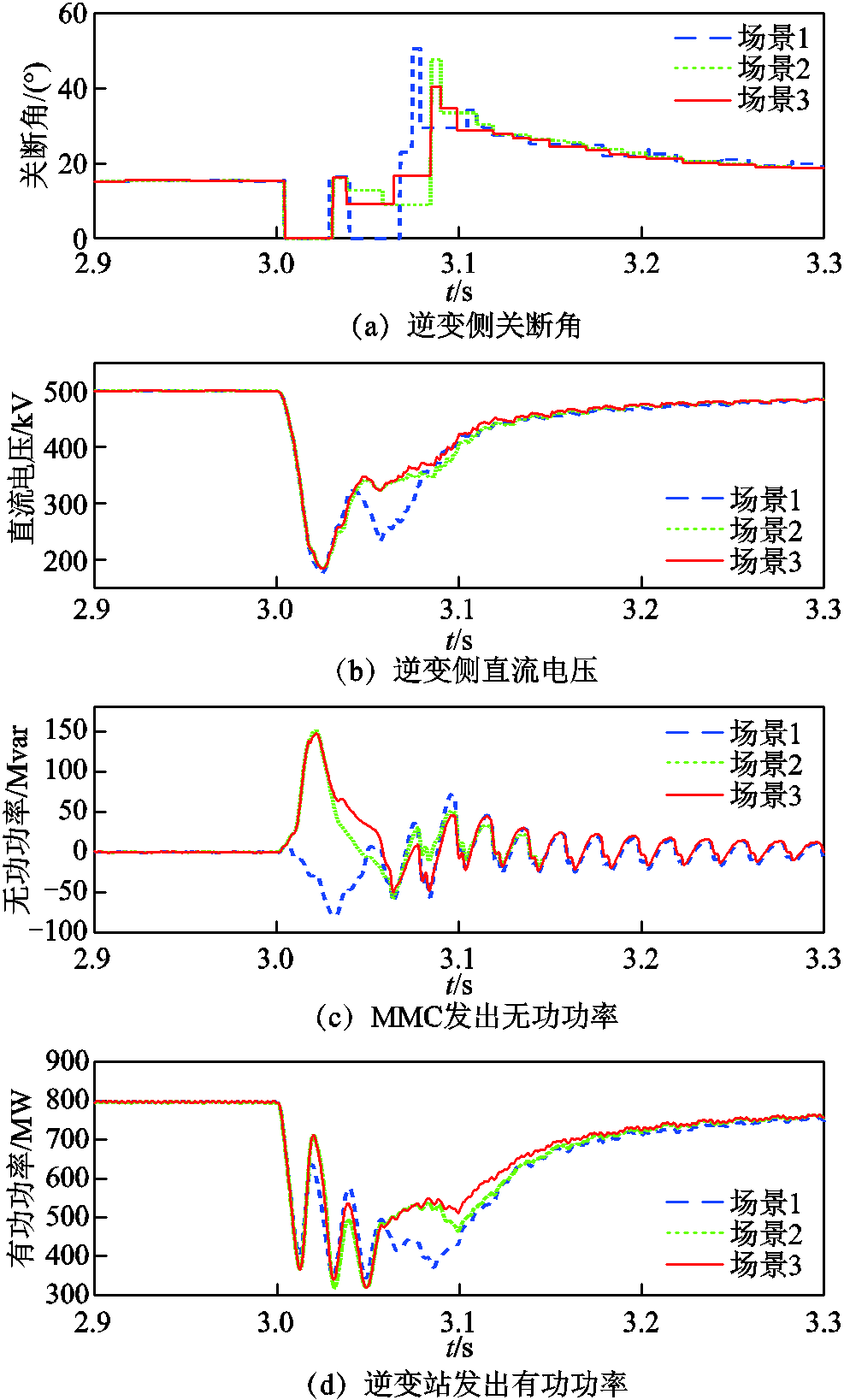
图16 三相故障时三种场景系统暂态特性对比(0.13 H)
Fig.16 Comparison of system transient characteristics in three Scenarios of three phase fault(0.13 H)
当发生0.13 H三相接地故障时,对比场景1~3系统暂态特性曲线,如图16a所示,场景1发生了后续换相失败,而所提控制策略并未发生后续换相失败。如图16c和附图2a、附图2d所示,场景2和场景3中MMC快速增发无功功率,减少了逆变侧向受端交流系统吸收的无功功率,使得Us相比于场景1跌落幅度减小,有效地抑制了系统后续换相失败的发生。但场景2所投入的单一基于Δγ无功控制策略相比于场景3采用的附加γ和Id控制策略在系统故障期间MMC无功功率增量较少。此外如图16d和附图2b所示,由于缺乏运行点上移控制策略,导致场景2在系统恢复期间功率传输较低。场景3在协调控制策略的作用下兼顾实现了系统后续换相失败抑制和功率快速平稳恢复,同时MMC延长动作时间有效地满足了LCC产生的新无功需求。在此工况下相比于场景1,场景3中PLCC增幅166.12%,Pac增幅43.98%;相比于场景2,场景3中PLCC增幅15.12%,Pac增幅9.57%。
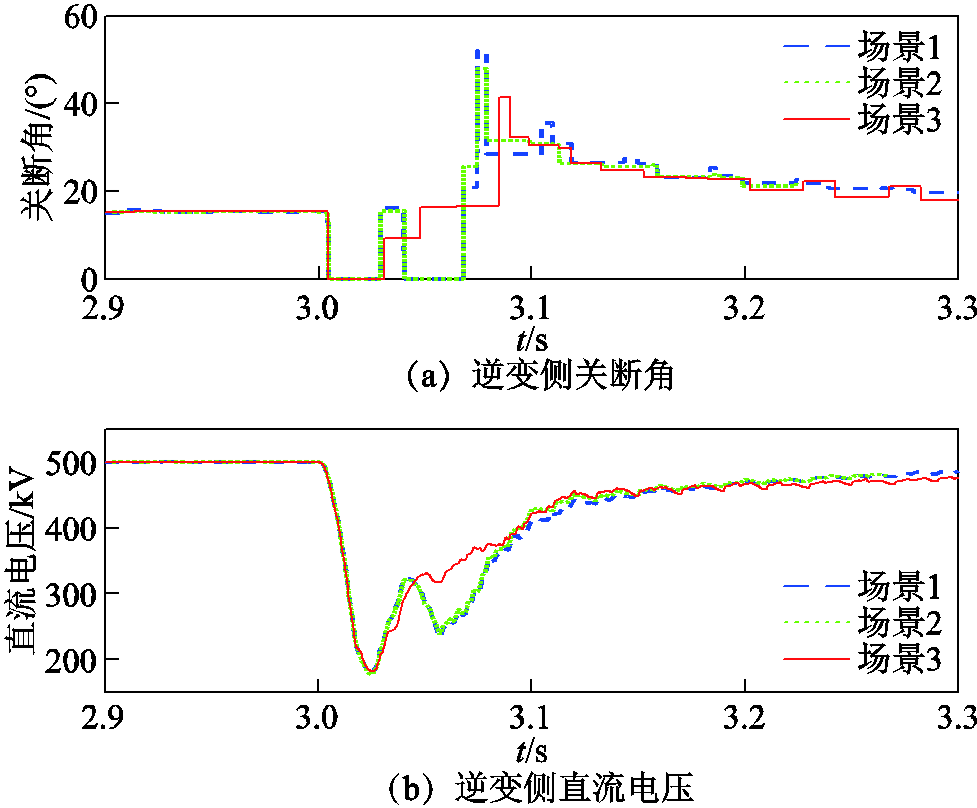
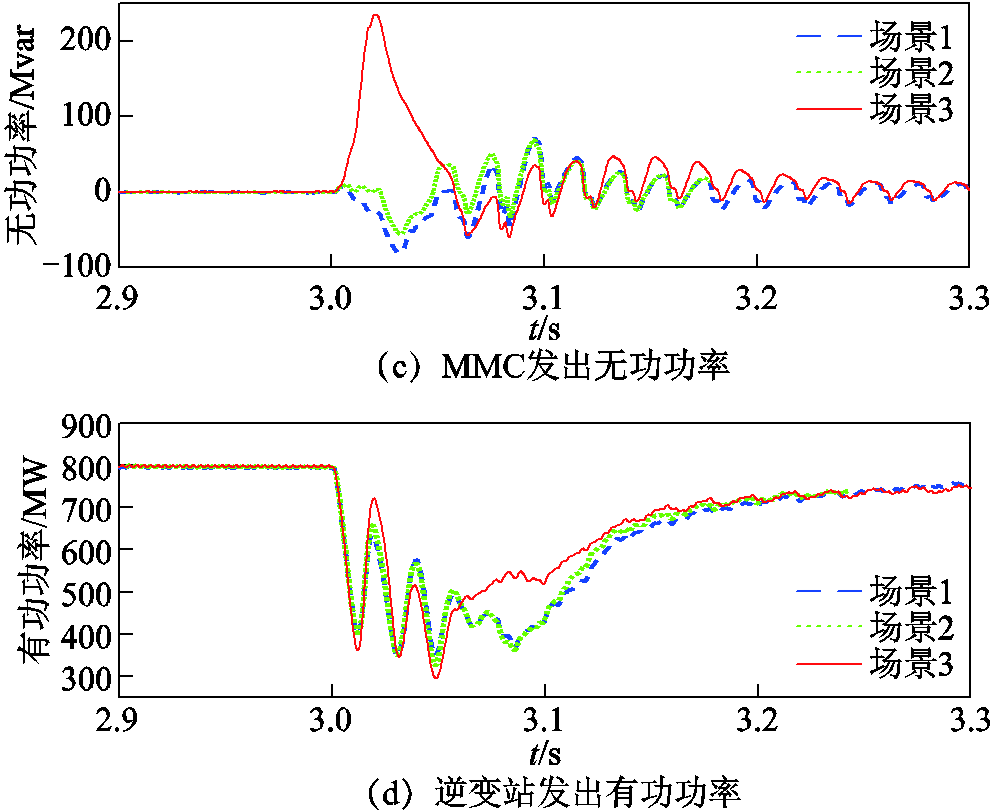
图17 三相故障时三种场景系统暂态特性对比(0.12 H)
Fig.17 Comparison of system transient characteristics in three Scenarios of three phase fault(0.12 H)
当发生0.12 H三相接地故障时,如图17a、图17b和附图3b所示,由于单一基于Δγ的MMC无功控制策略无法有效满足LCC的无功需求,换相失败抑制效果有限,场景1和场景2均发生了后续换相失败,而本文所提方法仍未发生后续换相失败。如图17b、图17d和附图3a、附图3b所示,场景3采用的基于Δγ和ΔId多反馈量的无功控制策略不仅能有效应对较为恶劣的故障工况,抑制系统后续换相失败发生和Us、Udi大幅跌落,还能实现系统功率快速恢复。在此工况下相比于场景1,场景3中PLCC增幅107%,Pac增幅44.07%;相比于场景2,场景3中PLCC增幅98.77%,Pac增幅47.2%。
参考文献[29-30]所采用的系统恢复期间量化指标在三相接地故障下,相比未投入协调控制策略,系统故障恢复期间Udi和Pac波动幅度范围明显减小并在故障切除后迅速增大,系统低电压运行程度最大降低38.61%;低功率运行程度最大降低47.02%,加快了系统的恢复速度。
对混合级联系统逆变侧发生单相接地故障时进行仿真分析。故障发生时刻为3 s,接地故障电感分别为0.04 H(较轻微故障)和0.03 H(较严重故障),故障持续时间为0.05 s。图18、图19分别为单相故障下上述三种场景系统暂态特性对比。
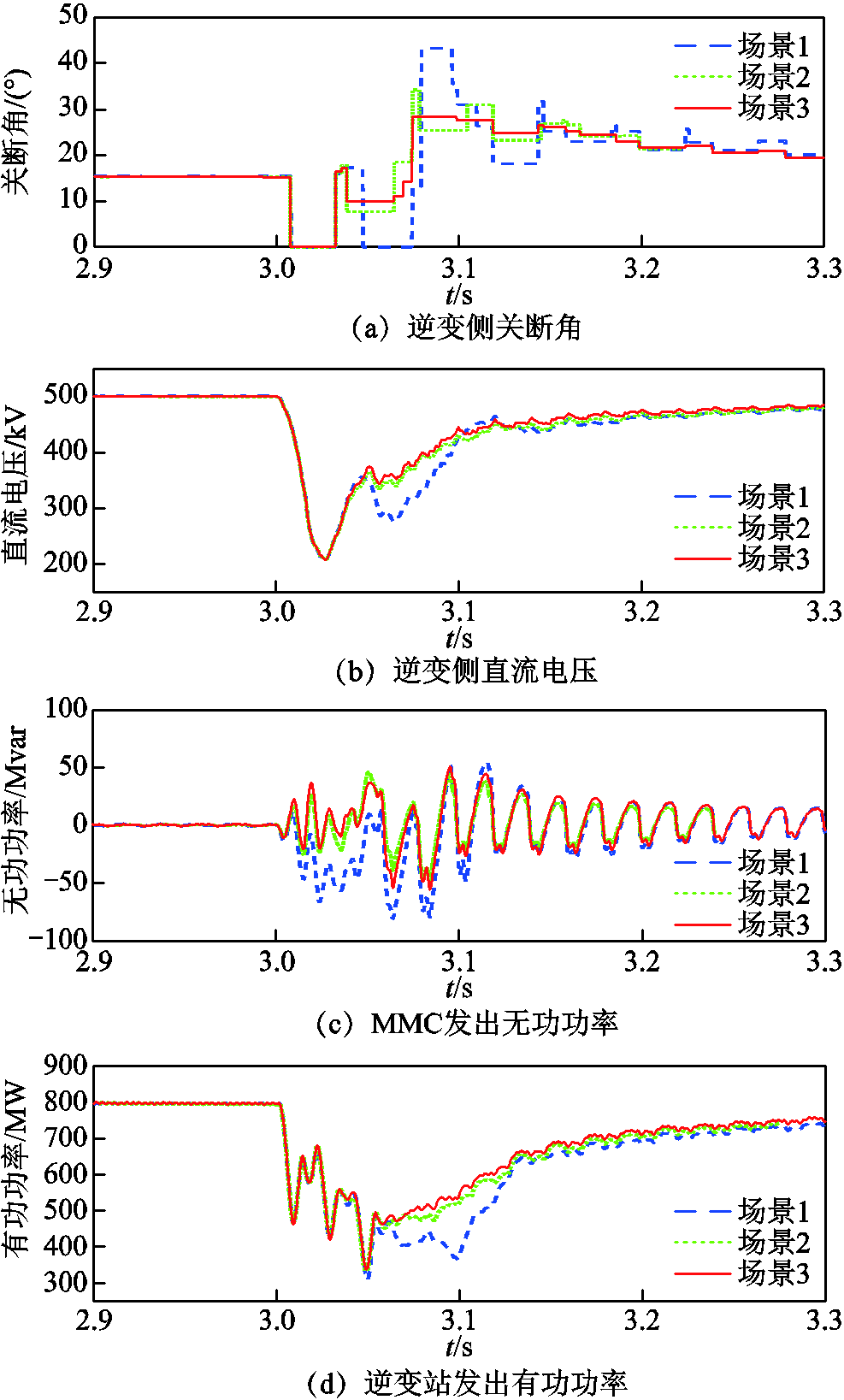
图18 单相故障时三种场景系统暂态特性对比(0.04 H)
Fig.18 Comparison of system transient characteristics in three Scenarios of single phase fault(0.04 H)
当发生0.04 H单相接地故障时,如图18a、图18c所示,场景1发生了后续换相失败。场景2和场景3中MMC在故障期间迅速增发无功功率,避免了系统发生后续换相失败。如图18d和附图4b所示,场景3在协调控制策略的作用下兼顾实现了后续换相失败抑制和功率快速平稳恢复相协调。在此工况下相比于场景1,场景3中PLCC增幅70.01%,Pac增幅47.13%;相比于场景2,场景3中PLCC增幅8.61%,Pac增幅7.12%。
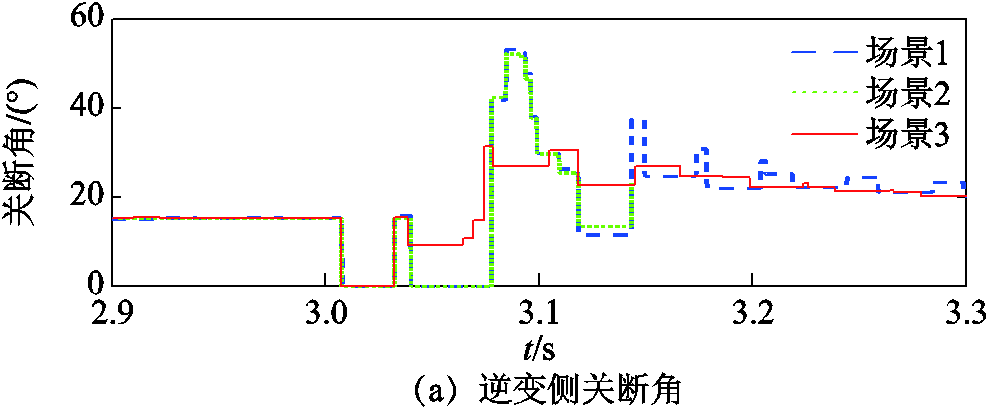
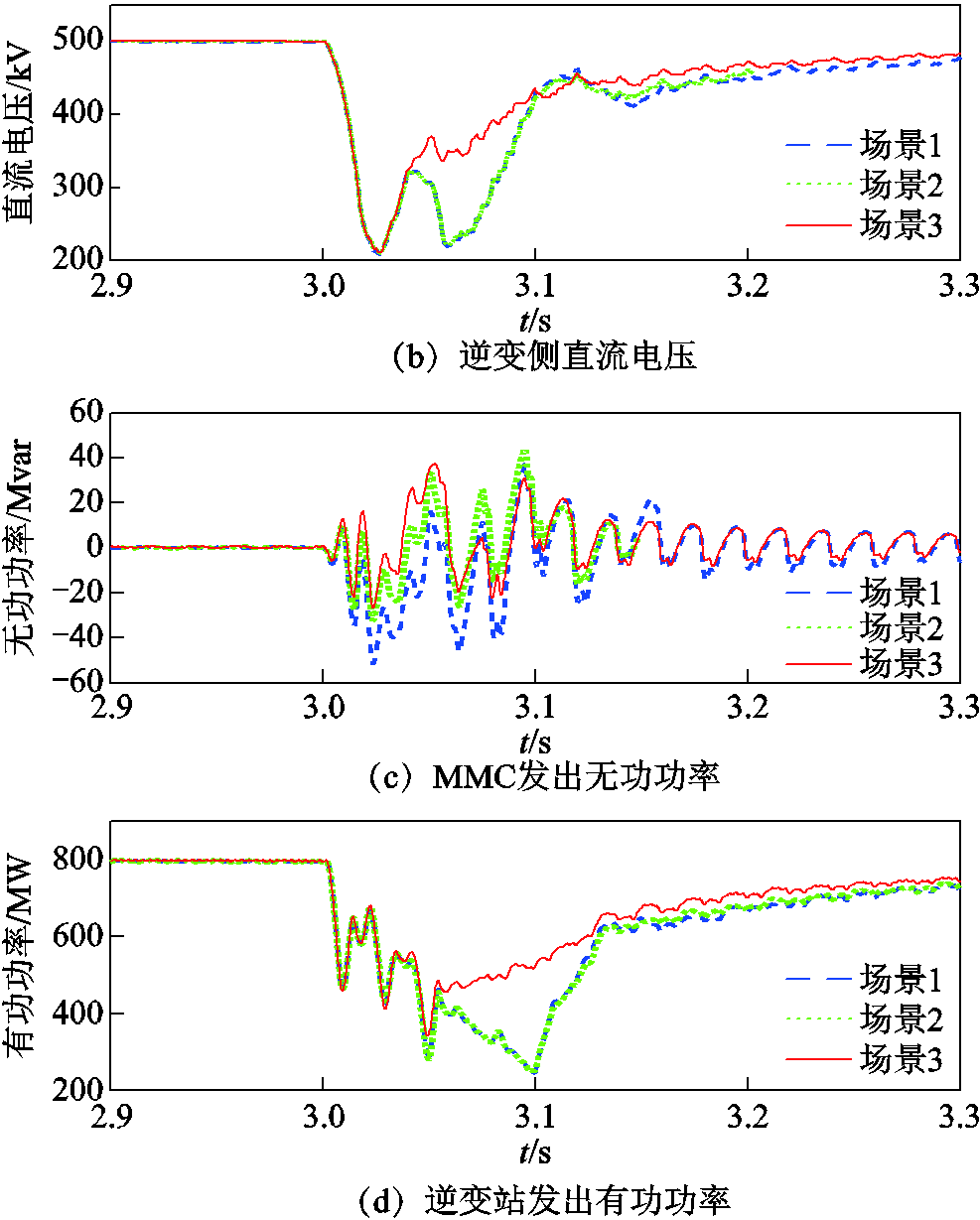
图19 单相故障时三种场景系统暂态特性对比(0.03 H)
Fig.19 Comparison of system transient characteristics in three Scenarios of single phase fault(0.03 H)
当发生0.03 H单相接地故障时,如图19a、图19d和附图5b所示,场景1、2均发生了后续换相失败。场景3不仅能抑制后续换相失败发生,还能有效增大系统有功传输。在此工况下相比于场景1,场景3中PLCC增幅194.35%,Pac增幅109.61%;相比于场景2,场景3中PLCC增幅180.53%,Pac增幅107.24%。
在单相接地故障下,相比未投入协调控制策略,系统故障恢复期间Udi和Pac波动幅度范围明显减小,并在故障切除后迅速增大,系统低电压运行程度最大降低57.79%;低功率运行程度最大降低109.29%,系统可以更快地恢复至稳定运行状态。
为验证2.1节传输到受端电网有功功率的变化量ΔP为产生Us相位前移量的主要影响因素,本文基于逆变侧发生三相接地故障时进行仿真验证。其中故障发生时刻为3 s,接地电感设置为0.13 H,故障持续时间为0.05 s,按照本文中所提三种场景分别进行对比分析。具体算例验证如图20所示。
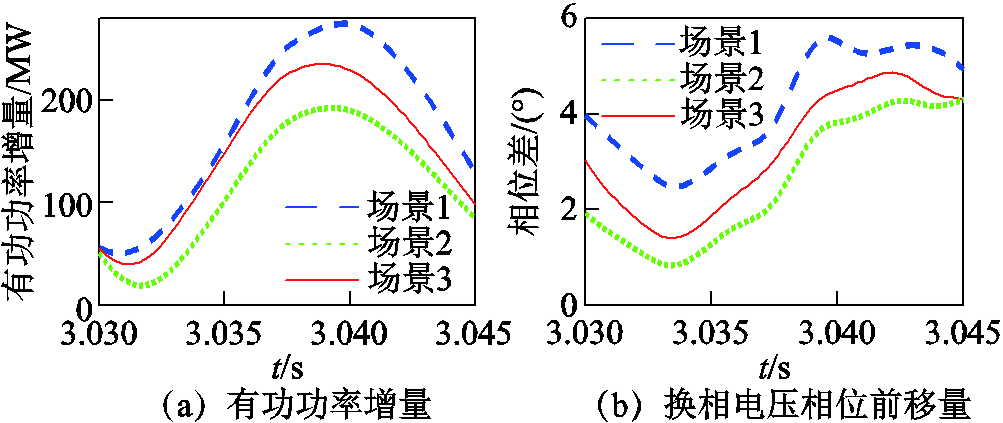
图20 故障恢复期间有功变化对换相电压相位差的影响
Fig.20 The impact of active power changes on the phase angle difference of commutation voltage during fault recovery
如图20a所示,在系统恢复期间随着换相条件得到改善,三种场景下传输至受端电网的有功功率变化量ΔP均逐渐增大;如图20b所示,Us相位前移量随ΔP增大而增大,与式(11)理论分析一致,由此可见,有功功率的变化量ΔP是产生相位前移量δ的主要影响因素。此外,为进一步研究Us相位前移量δ对关断角γ的不利影响,在相同故障工况下选取三种场景下关断角变化情况如图21所示。
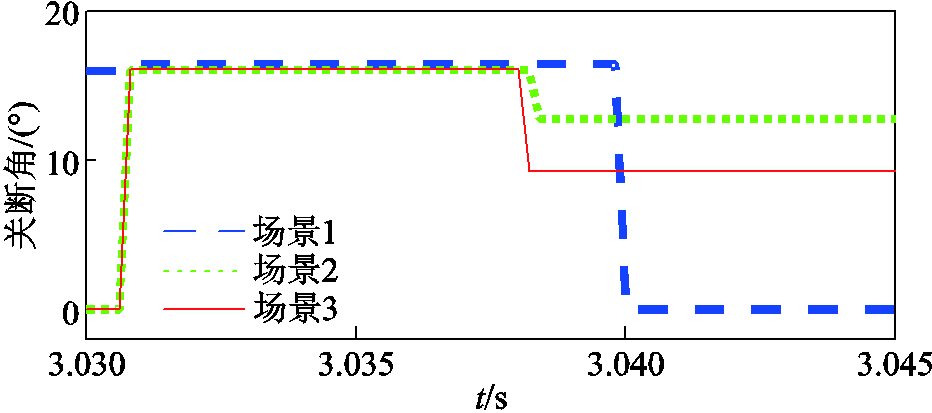
图21 故障恢复期间换相电压相位差对关断角的影响
Fig.21 The impact of commutation voltage phase angle difference on extinction angle during fault recovery
如图21所示,由于系统恢复期间Us相位前移,直接压缩了关断角裕度,因此三种场景下γ均呈现不同严重程度的跌落情况:其中场景1故障恢复期间有功增量最大,所产生的相位前移角δ也最大,因此γ的跌落幅度也最大,导致系统发生后续换相失败;场景2和场景3中γ的变化趋势也均和上述分析一致,验证了上述分析的正确性。
此外,为深入研究锁相环(Phase Locked Loop, PLL)作用下系统恢复期间Us相位前移对关断角的不利影响,本文以系统恢复阶段一个周期内A相交流母线电压及锁相环输出为例进行分析,具体波形如图22所示。图22中,θ*、θPLL分别为A相交流母线电压实际相位和锁相环输出相位;Us、UG2分别为系统恢复期间A相交流母线电压和受端交流系统等值电动势;a*、aord分别为实际触发角和触发角指令值;Δa为触发角偏差量。
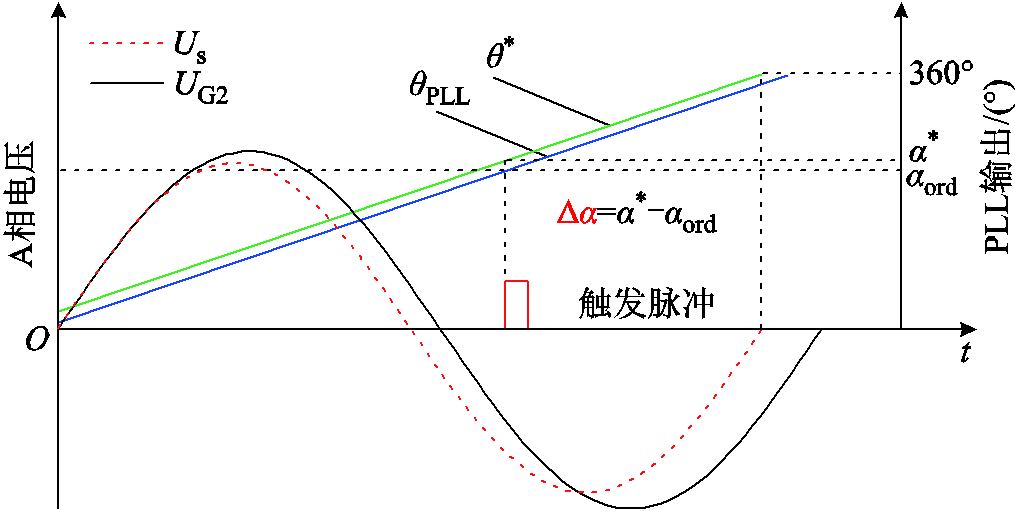
图22 锁相环相位误差导致的触发偏差
Fig.22 Trigger deviation caused by phase error of PLL
随着系统恢复期间传输到受端电网的有功功率变化量ΔP均逐渐增大,逆变侧交流母线电压出现相位前移,PLL由于动态性能较差无法在极短时间内快速地跟踪实际电压相位,其输出θPLL在系统恢复期间始终滞后A相交流母线电压实际相位。当θPLL增大至aord产生触发脉冲时,A相交流母线电压实际相位θ*已超出aord,这将导致逆变器实际触发角超出触发角指令值,相当于对换相阀延迟触发Δa,不利于关断角的恢复,可能导致系统发生后续换相失败。
由于本文逆变侧为弱交流系统,为了深入分析短路容量大小对系统的影响,本文基于CIGRE HVDC标准测试系统将混合级联系统逆变侧短路比分别设置为2.5、3.5和5,并选取不同数值接地故障电感,以观察不同短路比下受端交流系统故障与后续换相失败的关系。其中故障类型为三相接地故障,故障时刻为3 s,故障持续时间0.05 s,接地故障电感为0.01~0.1H。仿真结果如图23所示。
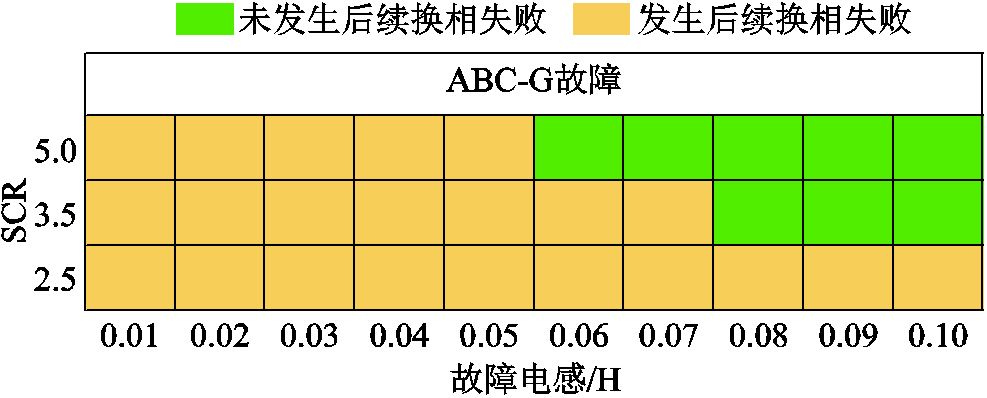
图23 不同SCR下受端故障与后续换相失败关系
Fig.23 Relationship between receiver fault and subsequent commutation failure under different SCR
如图23所示,随着逆变侧短路比逐渐增大,交流系统抵御故障能力持续增强,在不同接地电感下系统发生后续换相失败次数逐渐降低,因此适当地增加逆变侧交流系统强度可以在一定程度上抑制混合级联系统后续换相失败的发生。此外为验证所提协调控制策略在不同短路比下的适用性,本文以图17中三种短路比下均发生后续换相失败的故障场景0.05 H为例,验证协调控制策略在SCR=2.5、3、5下的有效性。其中故障发生时刻为3 s,故障持续时间为0.05 s,场景1不投入协调控制策略,场景2投入协调控制策略,具体算例验证如图24~图26所示。
当不投入协调控制策略时,三种短路比下系统均发生了后续换相失败且故障恢复期间功率传输较低,严重危害系统的安全运行;当投入本文所提协调控制策略后,MMC在故障期间快速增发无功,三种短路比下均抑制了系统后续换相失败的发生。因此,对于弱交流系统和强交流系统,本文提出的协调控制策略均能实现后续换相失败抑制和功率快速恢复相结合,具有一定的普适性。
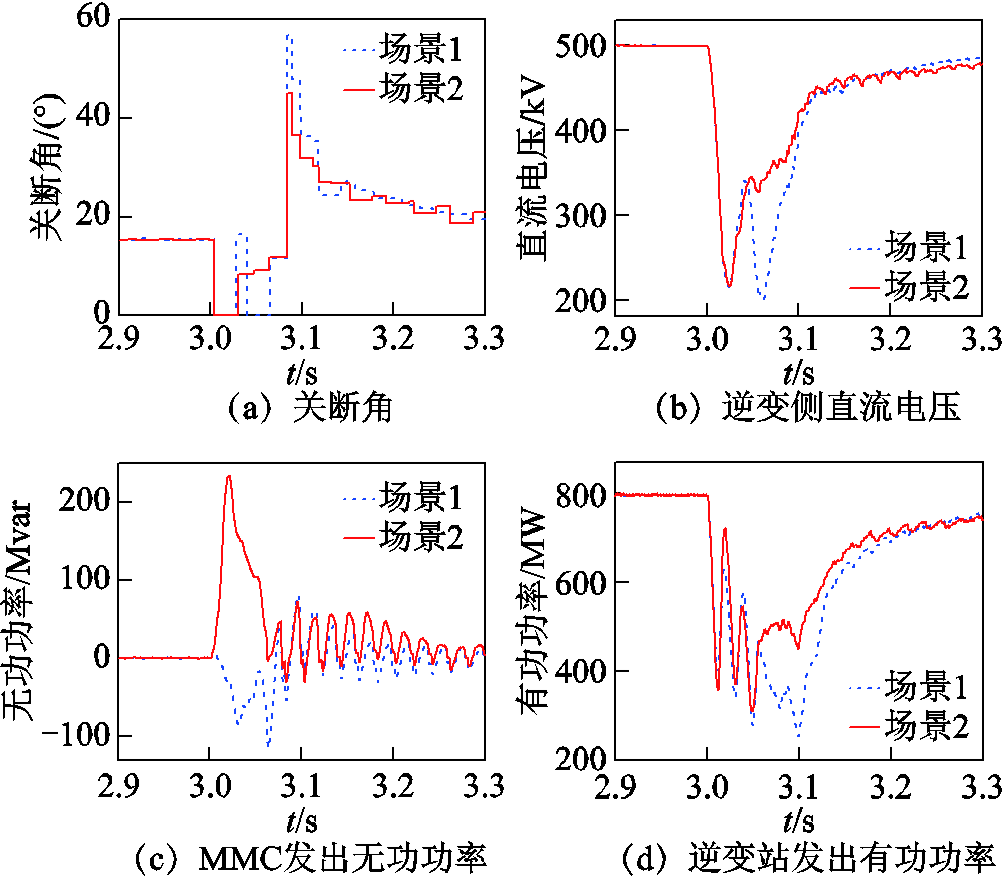
图24 三相故障下系统暂态特性对比(SCR=2.5)
Fig.24 Comparison of transient characteristics of power system under three-phase fault (SCR=2.5)
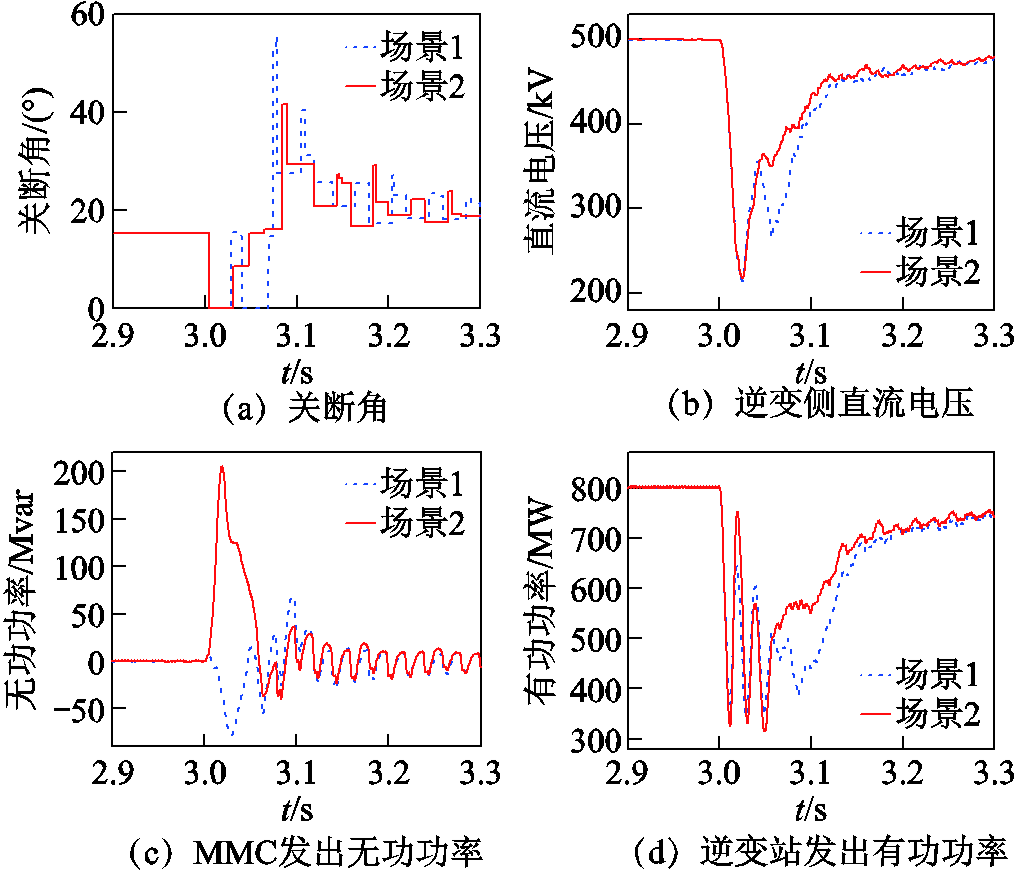
图25 三相故障下系统暂态特性对比(SCR=3.5)
Fig.25 Comparison of transient characteristics of power system under three-phase fault (SCR=3.5)
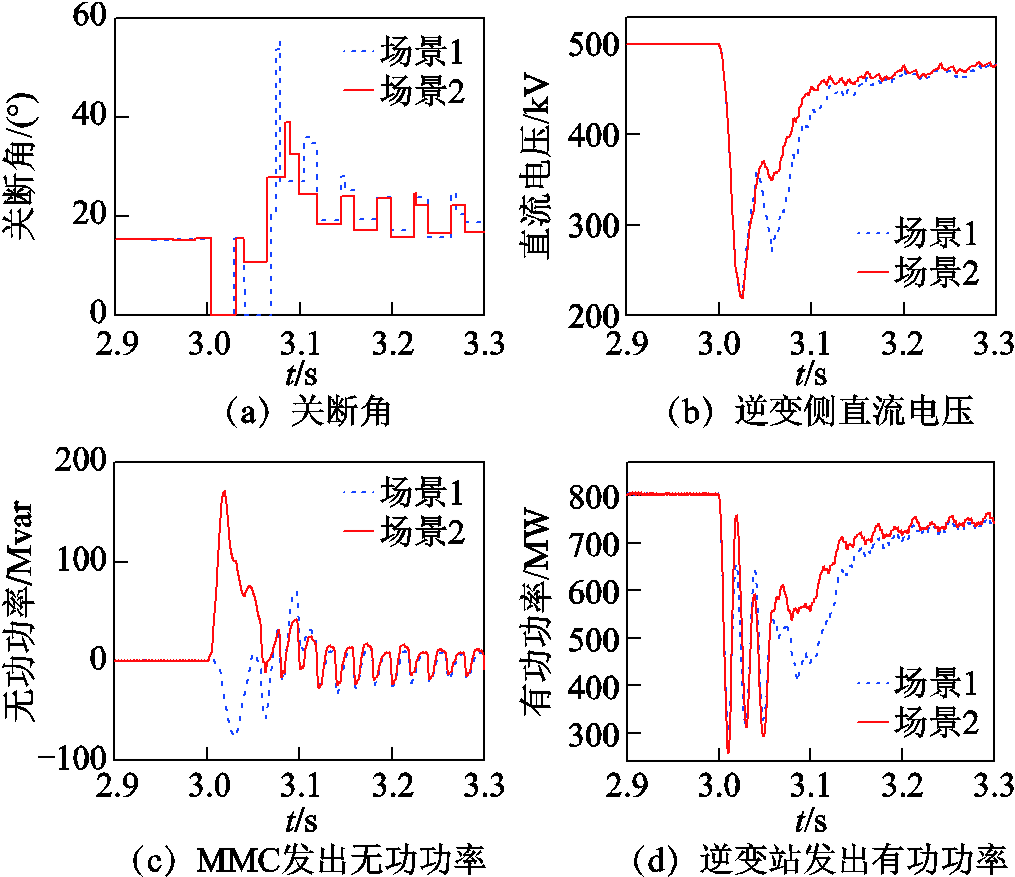
图26 三相故障下系统暂态特性对比(SCR=5)
Fig.26 Comparison of transient characteristics of power system under three-phase fault (SCR=5)
此外为验证所提协调控制策略在不同故障持续时间下的适用性,本文基于CIGRE HVDC标准对系统逆变侧发生三相接地故障时进行仿真验证。其中故障发生时刻为3 s,故障持续时间为0.1 s,接地电感设置为0.12 H,场景1不投入协调控制策略,场景2投入协调控制策略。具体算例验证如图27所示。
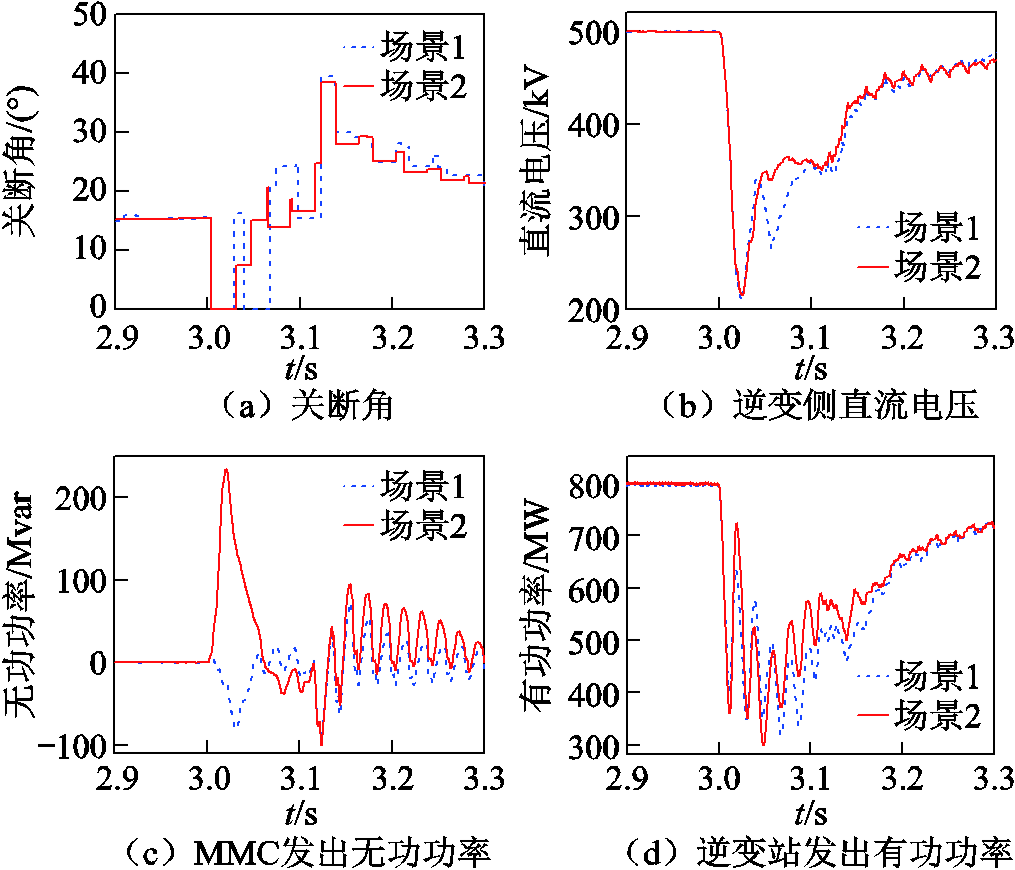
图27 三相故障下系统暂态特性对比(故障持续时间0.1 s)
Fig.27 Comparison of transient characteristics of power system under three-phase fault(fault duration 0.1 s)
当故障持续时间调整为0.1 s时,对比场景1、2系统暂态特性曲线,如图27所示,场景1发生了后续换相失败且故障恢复期间功率传输较低;当投入协调控制策略后,场景2中MMC快速增发无功功率,同时VDCOL曲线在运行点上移策略的作用下动态变化,有效地抑制了系统发生后续换相失败并降低有功功率跌落幅度。因此在不同故障持续时间下,本文所提出的协调控制策略均能实现后续换相失败抑制和功率快速恢复相结合,具有一定普适性。
本文针对混合级联直流输电系统故障恢复期间易发生后续换相失败的问题,基于故障安全域提出了一种协调控制策略,得到以下结论:
1)混合级联系统多控制器交互期间电气量大幅波动和LCC较大的无功需求不利于系统恢复,当QLCC与系统恢复过程不匹配时,将会恶化受端电网暂态稳定性,可能导致系统在恢复阶段末期发生后续换相失败。
2)本文所建立的故障安全域,充分考虑了控制器作用和MMC无功支撑对系统的影响,量化分析了逆变侧LCC在多电气量耦合作用下的安全性,确定了系统故障恢复期间不发生后续换相失败的功率运行范围。
3)本文所提出的协调控制策略,在充分发挥MMC动态无功调节能力的同时根据电流偏差量实时修改VDCOL曲线,实现了系统后续换相失败抑制和功率快速平稳恢复相协调。
4)在不同严重程度交流故障、不同短路比和不同故障持续时间下,本文提出的协调控制策略不仅能有效地抑制混合级联系统发生后续换相失败,还能兼顾实现功率快速平稳恢复,减少系统故障期间各电气量的波动程度,加快系统的恢复进程,在较严重程度故障下有功增幅最高可达109.61%,具有明显的优势和一定的工程应用价值。
附 录
1. 系统恢复期间VDCOL对无功功率的影响
为深入研究系统恢复期间VDCOL对QLCC的影响,根据CIGRE HVDC标准模型中VDCOL曲线参数设置,可得Id关于Udi的函数表达式为
 (A1)
(A1)
式中, ;IdL、UdL和IdH、UdH均为常数。
;IdL、UdL和IdH、UdH均为常数。
此外由混合级联系统逆变侧LCC与MMC的级联结构可得
 (A2)
(A2)
将式(A1)、式(A2)代入QLCC表达式即可得到考虑VDCOL作用下QLCC与UdLCC的函数关系为
由式(A3)可得,QLCC与UdLCC具有复杂耦合的关系,为深入研究VDCOL作用期间无功功率随逆变侧直流电压的变化趋势,求解QLCC关于Udi的偏导数为
 (A4)
(A4)
其中
代入标准模型参数,即可得到不同交流电压下QLCC关于Udi的偏导数如附图1所示。由混合级联逆变侧拓扑结构可得,LCC与并联MMC组共同分担逆变侧直流电压。在故障期间,由于MMC的稳压作用可近似保持UdMMC=0.5(pu),因此图中直流电压变化区间为[0.5,UdH],即黑色虚线右侧蓝色区域。在此区域,QLCC关于UdLCC的偏导数均为正数,所以在系统恢复期间,随着直流电压逐渐上升,增大了LCC的无功需求,可能导致系统发生后续换相失败。
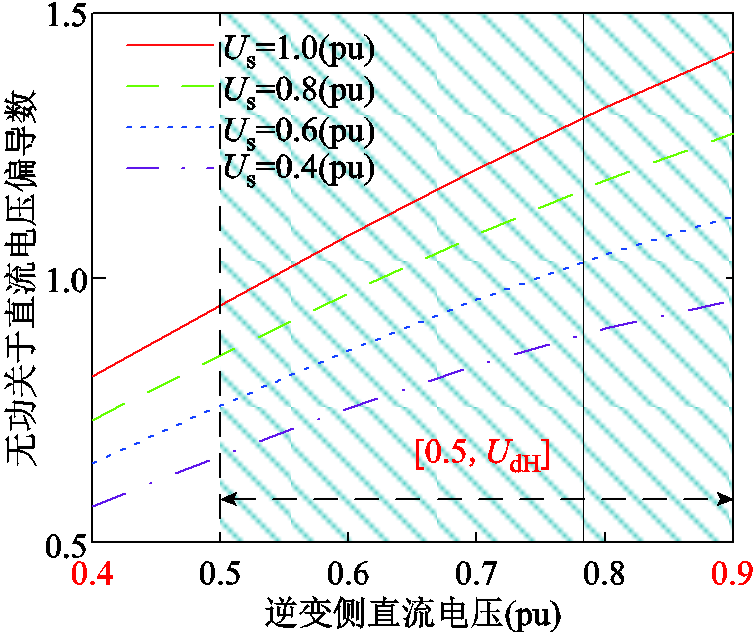
附图1 不同交流电压下无功关于直流电压偏导数
App.Fig.1 Partial derivatives of QLCC with respect to Udi under different AC voltages
2. LCC、MMC主回路延时和控制响应延时
为深入研究LCC、MMC主回路和控制响应延时对系统总体性能的影响,本文结合LCC、MMC等效建模方法,建立混合级联系统直流侧RLC等效模型并利用拉氏变换法求解得到LCC、MMC主回路延时为0.000 65 s。此外本文算例中混合级联直流输电系统控制响应延时见附表1。
附表1 混合级联直流输电系统控制延时参数
App.Tab.1 Control delay parameters of hybrid cascaded HVDC system (单位:s)
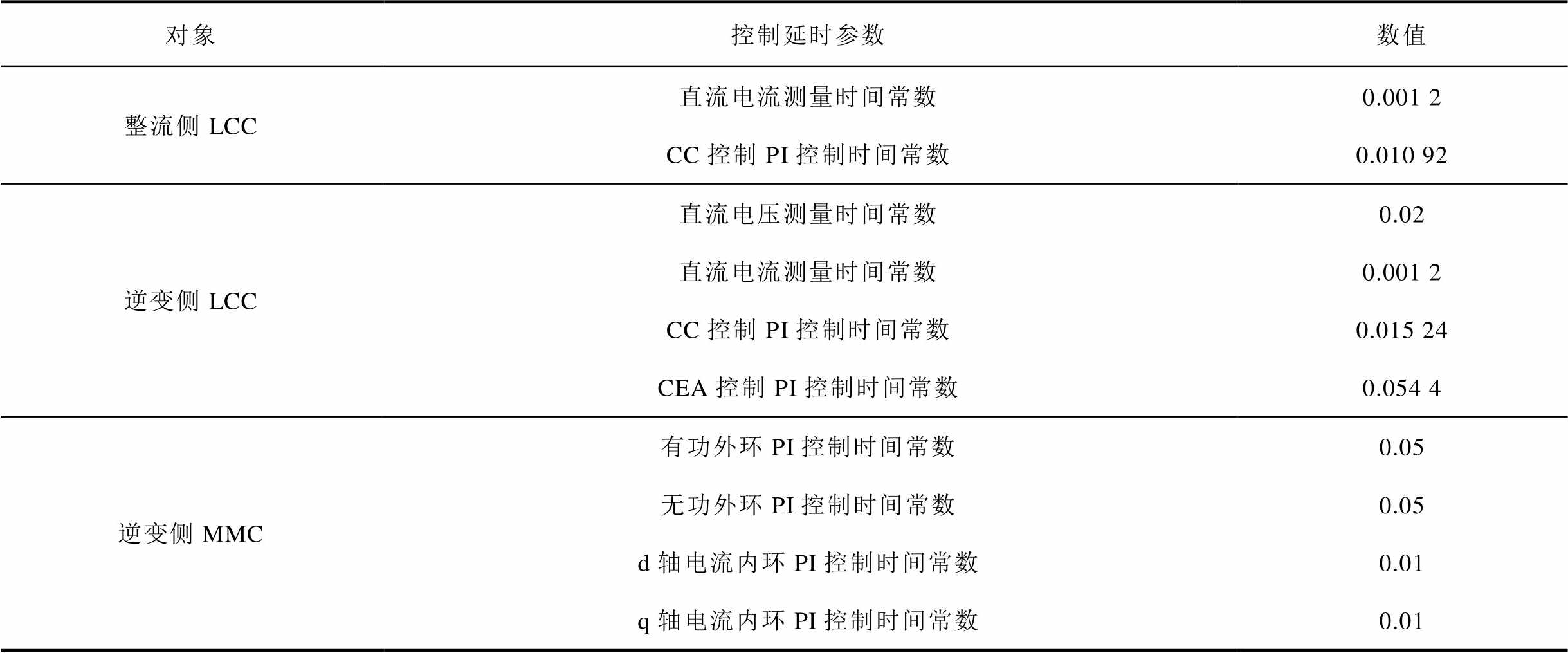
对象控制延时参数数值 整流侧LCC直流电流测量时间常数0.001 2 CC控制PI控制时间常数0.010 92 逆变侧LCC直流电压测量时间常数0.02 直流电流测量时间常数0.001 2 CC控制PI控制时间常数0.015 24 CEA控制PI控制时间常数0.054 4 逆变侧MMC有功外环PI控制时间常数0.05 无功外环PI控制时间常数0.05 d轴电流内环PI控制时间常数0.01 q轴电流内环PI控制时间常数0.01
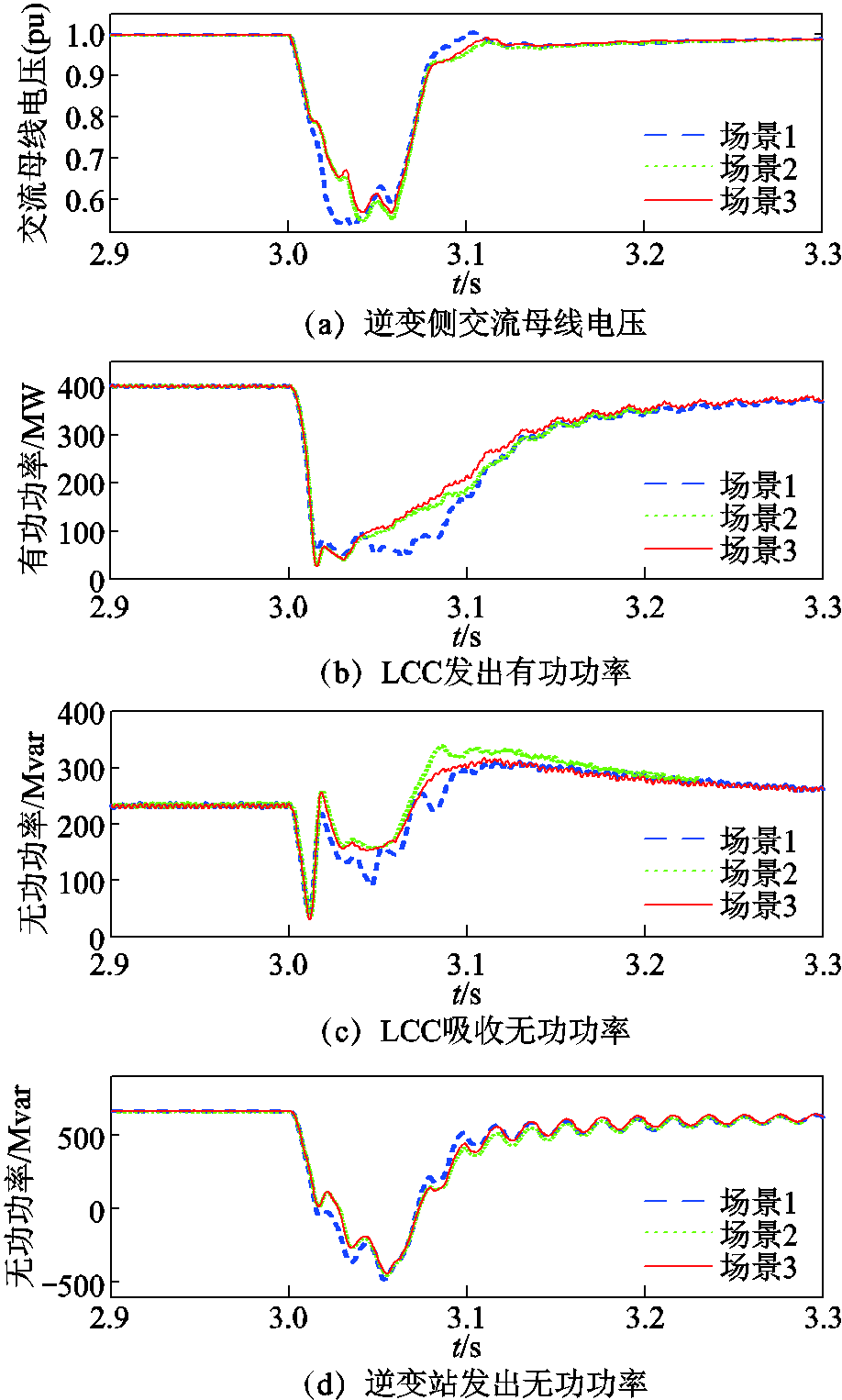
附图2 三相故障时三种场景系统暂态特性对比(0.13 H)
App.Fig.2 Comparison of system transient characteristics in three Scenarios of three phase fault (0.13 H)
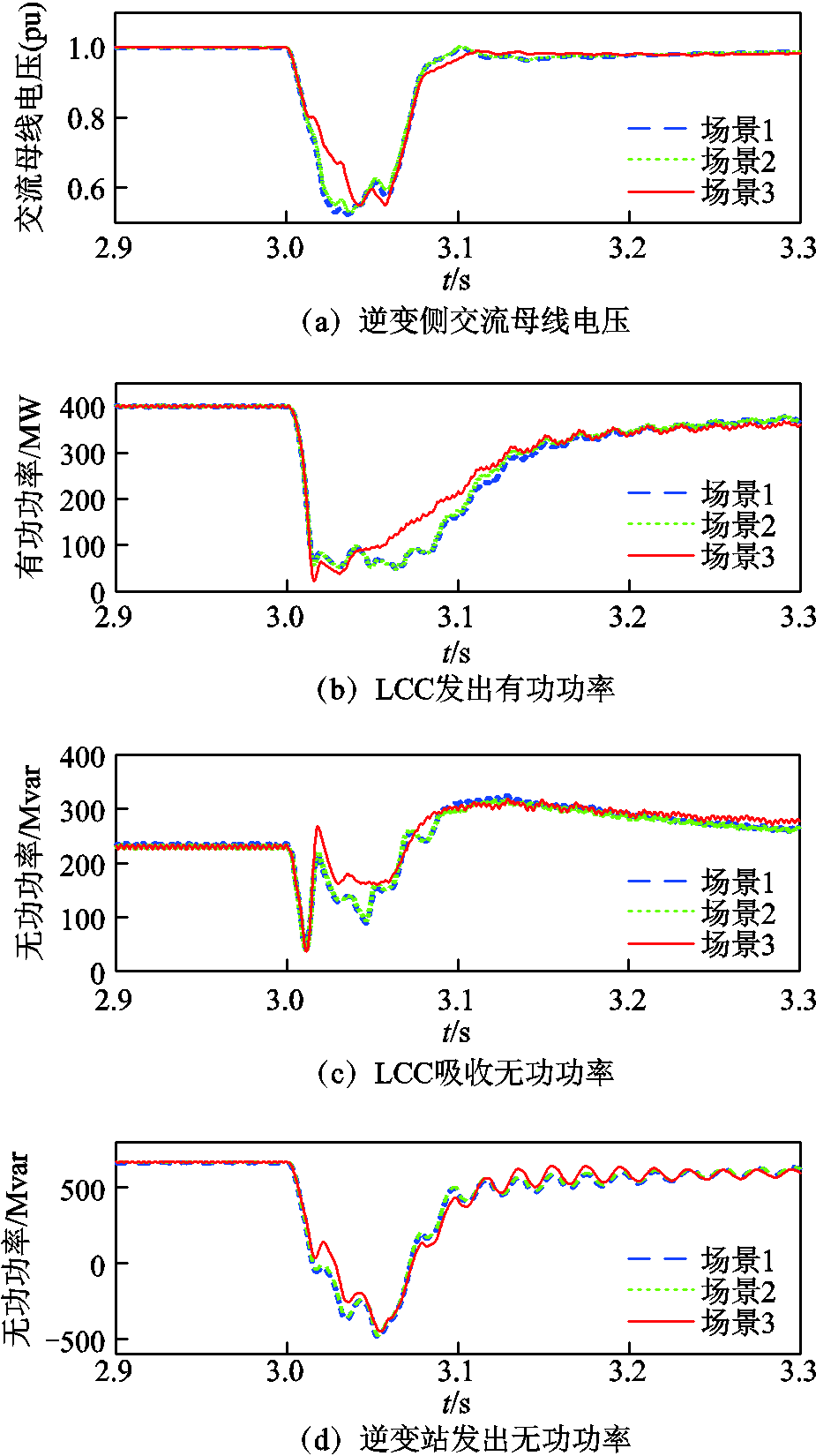
附图3 三相故障时三种场景系统暂态特性对比(0.12 H)
App.Fig.3 Comparison of system transient characteristics in three Scenarios of three phase fault (0.12 H)
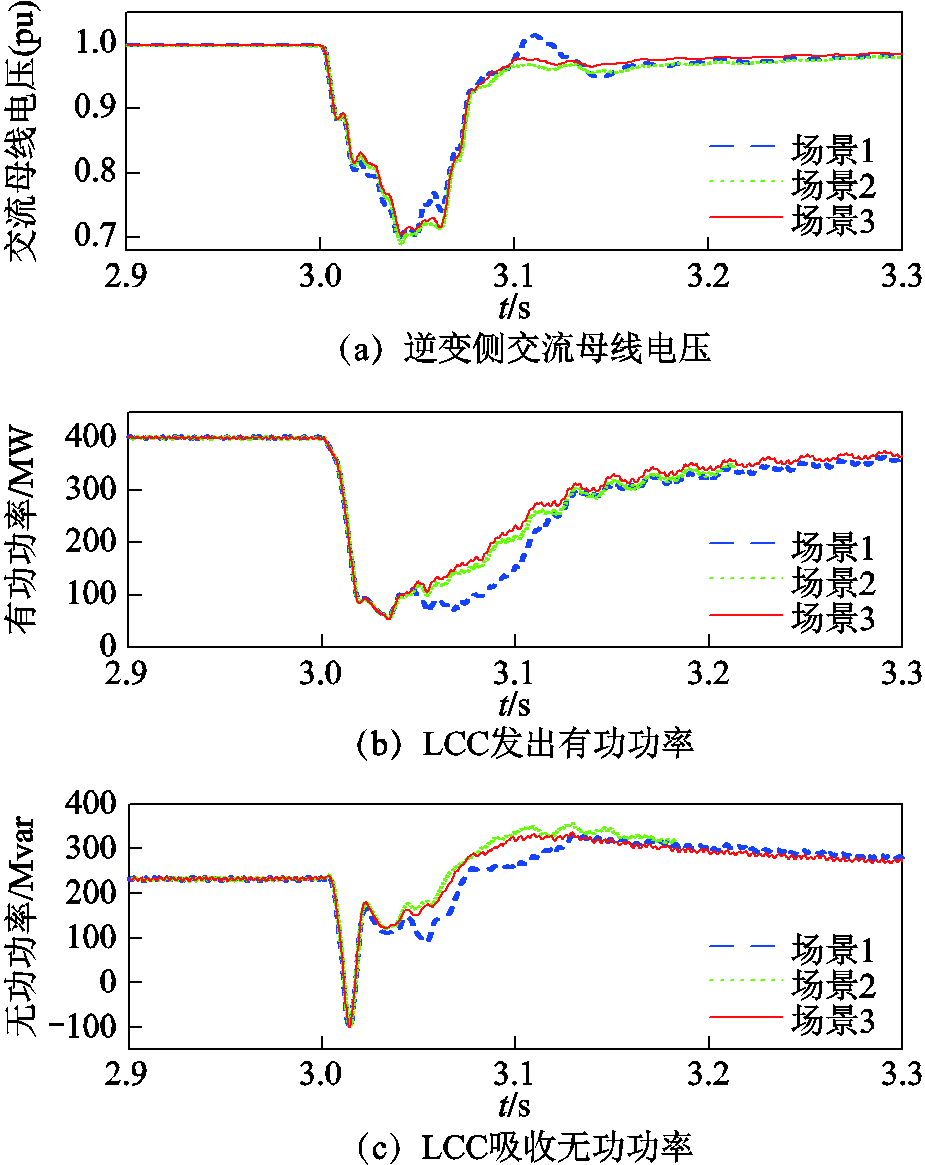
附图4 单相故障时三种场景系统暂态特性对比(0.04 H)
App.Fig.4 Comparison of system transient characteristics in three Scenarios of single phase fault (0.04 H)
附图5 单相故障时三种场景系统暂态特性对比(0.03 H)
App.Fig.5 Comparison of system transient characteristics in three Scenarios of single phase fault (0.03 H)
参考文献
[1] 刘振亚, 秦晓辉, 赵良, 等. 特高压直流分层接入方式在多馈入直流电网的应用研究[J]. 中国电机工程学报, 2013, 33(10): 1-7, 25. Liu Zhenya, Qin Xiaohui, Zhao Liang, et al. Study on the application of UHVDC hierarchical connection mode to multi-infeed HVDC system[J]. Proceedings of the CSEE, 2013, 33(10): 1-7, 25.
[2] 王增平, 刘席洋, 李林泽, 等. 多馈入直流输电系统换相失败边界条件[J]. 电工技术学报, 2017, 32(10): 12-19. Wang Zengping, Liu Xiyang, Li Linze, et al. Boundary conditions of commutation failure in multi-infeed HVDC systems[J]. Transactions of China Electrote-chnical Society, 2017, 32(10): 12-19.
[3] 许汉平, 杨炜晨, 张东寅, 等. 考虑换相失败相互影响的多馈入高压直流系统换相失败判断方法[J]. 电工技术学报, 2020, 35(8): 1776-1786. Xu Hanping, Yang Weichen, Zhang Dongyin, et al. Commutation failure judgment method for multi-infeed HVDC systems considering the interaction of commutation failures[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1776-1786.
[4] 王增平, 刘席洋, 郑博文, 等. 基于电压波形拟合的换相失败快速预测与抑制措施[J]. 电工技术学报, 2020, 35(7): 1454-1463. Wang Zengping, Liu Xiyang, Zheng Bowen, et al. The research on fast prediction and suppression measures of commutation failure based on voltage waveform fitting[J]. Transactions of China Electrotechnical Society, 2020, 35(7): 1454-1463.
[5] 汤广福. 基于电压源换流器的高压直流输电技术[M]. 北京: 中国电力出版社, 2010.
[6] Guo Chunyi, Zhao Chengyong. Supply of an entirely passive AC network through a double-infeed HVDC system[J]. IEEE Transactions on Power Electronics, 2010, 25(11): 2835-2841.
[7] 刘泽洪, 王绍武, 种芝艺, 等. 适用于混合级联特高压直流输电系统的可控自恢复消能装置[J]. 中国电机工程学报, 2021, 41(2): 514-524. Liu Zehong, Wang Shaowu, Chong Zhiyi, et al. Controllable and adaptive energy absorption device for hybrid cascaded UHVDC transmission system[J]. Proceedings of the CSEE, 2021, 41(2): 514-524.
[8] 徐政, 王世佳, 李宁璨, 等. 适用于远距离大容量架空线路的LCC-MMC串联混合型直流输电系统[J]. 电网技术, 2016, 40(1): 55-63. Xu Zheng, Wang Shijia, Li Ningcan, et al. A LCC and MMC series hybrid HVDC topology suitable for bulk power overhead line transmission[J]. Power System Technology, 2016, 40(1): 55-63.
[9] Hong Lerong, Zhou Xiaoping, Liu Yifeng, et al. Analysis and improvement of the multiple controller interaction in LCC-HVDC for mitigating repetitive commutation failure[J]. IEEE Transactions on Power Delivery, 2021, 36(4): 1982-1991.
[10] Liu Lei, Lin Sheng, Liu Jian, et al. Analysis and prevention of subsequent commutation failures caused by improper inverter control interactions in HVDC systems[J]. IEEE Transactions on Power Delivery, 2020, 35(6): 2841-2852.
[11] 李培平, 姚伟, 高东学, 等. 基于电化学储能的多馈入直流系统暂态控制及影响因素分析[J]. 电工技术学报, 2021, 36(增刊1): 154-167. Li Peiping, Yao Wei, Gao Dongxue, et al. Transient control and influencing factors analysis of multi-infeed HVDC system based on electrochemical energy storage[J]. Transactions of China Electrotechnical Society, 2021, 36(S1): 154-167.
[12] 汪娟娟, 郑睿娜, 傅闯, 等. 基于逆变站动态无功控制的后续换相失败抑制方法[J]. 电工技术学报, 2023, 38(17): 4672-4682. Wang Juanjuan, Zheng Ruina, Fu Chuang, et al. A method based on constant reactive power control of inverter to suppress the subsequent commutation failure in HVDC system[J]. Transactions of China Electrotechnical Society, 2023, 38(17): 4672-4682.
[13] 汪家铭, 徐谦, 戴攀, 等. 基于无功反馈控制的后续换相失败抑制方法[J]. 电力系统自动化, 2021, 45(12): 101-108. Wang Jiaming, Xu Qian, Dai Pan, et al. Suppression method of subsequent commutation failure based on reactive power feedback control[J]. Automation of Electric Power Systems, 2021, 45(12): 101-108.
[14] 朱龙臻, 牛翀, 王志冰, 等. 一种抑制连续换相失败的关断角动态补偿控制方法[J]. 中国电机工程学报, 2021, 41(22): 7621-7631. Zhu Longzhen, Niu Chong, Wang Zhibing, et al. An extinction angle dynamic compensation control method for suppressing continuous commutation failure[J]. Proceedings of the CSEE, 2021, 41(22): 7621-7631.
[15] 程帆, 姚良忠, 王志冰, 等. 一种基于虚拟锁相电压的换相失败抑制策略[J]. 中国电机工程学报, 2020, 40(9): 2756-2766. Cheng Fan, Yao Liangzhong, Wang Zhibing, et al. A commutation failure mitigation strategy based on virtual phase lock loop voltage[J]. Proceedings of the CSEE, 2020, 40(9): 2756-2766.
[16] 彭龙, 汤涌, 程帆, 等. 基于实时戴维南等值参数估计的LCC-HVDC后续换相失败抑制策略[J]. 中国电机工程学报, 2022, 42(9): 3151-3161. Peng Long, Tang Yong, Cheng Fan, et al. A subsequent commutation failure suppression strategy for LCC-HVDC based on real-time thevenin equivalent parameter estimation[J]. Proceedings of the CSEE, 2022, 42(9): 3151-3161.
[17] 吕哲, 葛怀畅, 郭庆来, 等. 面向受端电网暂态电压稳定的高压直流系统主动控制研究[J]. 中国电机工程学报, 2022, 42(22): 8041-8053. Lü Zhe, Ge Huaichang, Guo Qinglai, et al. Research on active control of HVDC system for transient voltage stability of receiving-end grid[J]. Proceedings of the CSEE, 2022, 42(22): 8041-8053.
[18] 曹善康, 魏繁荣, 林湘宁, 等. 一种基于自适应电压限值的换相失败抑制策略[J]. 电力系统保护与控制, 2023, 51(1): 165-175. Cao Shankang, Wei Fanrong, Lin Xiangning, et al. A commutation failure suppression strategy based on adaptive voltage limits[J]. Power System Protection and Control, 2023, 51(1): 165-175.
[19] 李瑶佳, 汪娟娟, 李子林, 等. 考虑高压直流输电系统无功特性的低压限流参数设置[J]. 电力系统保护与控制, 2017, 45(16): 16-23. Li Yaojia, Wang Juanjuan, Li Zilin, et al. VDCOL parameters setting influenced by reactive power characteristics of HVDC system[J]. Power System Protection and Control, 2017, 45(16): 16-23.
[20] Ouyang Jinxin, Zhang Zhen, Pang Mingyu, et al. Current-limit control method to prevent subsequent commutation failure of LCC-HVDC based on adaptive trigger voltage[J]. International Journal of Electrical Power & Energy Systems, 2020, 122: 106190.
[21] Ouyang Jinxin, Pang Mingyu, Zhang Zhen, et al. Fault security region modeling and adaptive current control method for the inverter station of DC transmission system[J]. IEEE Transactions on Power Delivery, 2022, 37(6): 4979-4988.
[22] Guo Chunyi, Wu Zhangxi, Yang Shuo, et al. Overcurrent suppression control for hybrid LCC/VSC cascaded HVDC system based on fuzzy clustering and identification approach[J]. IEEE Transactions on Power Delivery, 2022, 37(3): 1745-1753.
[23] Cheng Fan, Yao Liangzhong, Xu Jian, et al. A comprehensive AC fault ride-through strategy for HVDC link with serial-connected LCC-VSC hybrid inverter[J]. CSEE Journal of Power and Energy Systems, 2021, 8(1): 175-187.
[24] 樊鑫, 郭春义, 杜夏冰, 等. 特高压混合级联直流输电系统抑制逆变站后续换相失败的无功功率调控方法[J]. 电网技术, 2021, 45(9): 3443-3452. Fan Xin, Guo Chunyi, Du Xiabing, et al. Reactive power coordinated control approach for suppressing subsequent commutation failure of inverter station in hybrid cascaded UHVDC system[J]. Power System Technology, 2021, 45(9): 3443-3452.
[25] Zhou Bohao, Li Bin, He Jiawei, et al. A novel mitigation strategy of subsequent commutation failures in the hybrid cascaded LCC-MMC HVDC transmission system[J]. International Journal of Electrical Power & Energy Systems, 2023, 148: 108969.
[26] Li Zhou, Wei Ziang, Zhan Ruopei, et al. System operational dispatching and scheduling strategy for hybrid cascaded multi-terminal HVDC[J]. International Journal of Electrical Power & Energy Systems, 2020, 122: 106195.
[27] 朱海, 郝亮亮, 和敬涵, 等. HVDC送端交流系统故障引起换相失败的机理分析[J]. 电工技术学报, 2023, 38(16): 4465-4478. Zhu Hai, Hao Liangliang, He Jinghan, et al. Mechanism analysis of commutation failure caused by fault of HVDC sending end AC system[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4465-4478.
[28] Wang Puyu, Wang Yongkun, Jiang Ningqiang, et al. A comprehensive improved coordinated control strategy for a STATCOM integrated HVDC system with enhanced steady/transient state behaviors[J]. International Journal of Electrical Power & Energy Systems, 2020, 121: 106091.
[29] Wang Juanjuan, Huang Menghua, Fu Chuang, et al. A new recovery strategy of HVDC system during AC faults[J]. IEEE Transactions on Power Delivery, 2019, 34(2): 486-495.
[30] Cuo Chunyi, Zhao Wei, Wu Zhangxi, et al. Current balancing control approach for paralleled MMC groups in hybrid LCC/VSC cascaded HVDC system[J/OL]. CSEE Journal of Power and Energy Systems, 2023. DOI: 10.17775/CSEEJPES.2022.00630.
Abstract The hybrid cascaded high voltage direct current (HVDC) system combines the advantages of line commutated converter (LCC) and modular multilevel converter (MMC), making it a prominent area of focus in both academic research and engineering applications. When an AC fault occurs in the hybrid cascaded HVDC system, it may lead to the first commutation failure of the LCC converter on the inverter side. During the recovery period of the system after the first commutation failure, significant fluctuations in the electrical quantity on the inverter side and large reactive power demand on the LCC may lead to subsequent commutation failures at the end of the recovery period, seriously endangering the stable operation of the power system. The investigation on hybrid cascaded HVDC system is presently in its initial phases. Current research largely concentrates on investigating the impact of MMC on reactive power support and improving the voltage dependent current order limitation (VDCOL) curve in order to address commutation failures and power recovery, without proposing corresponding coordinated control strategies from the perspective of balancing reactive power interaction and rapid power recovery. There is a lack of safe operating range of the system and in-depth research on the key issue of subsequent commutation failures. Thus, this paper proposes a coordinated control method utilizing MMC and VDCOL to effectively address both the mitigation of subsequent commutation failures and the rapid and stable restoration of power in hybrid cascaded HVDC system.
Firstly, the adverse effects of AC bus voltage phase advance on the inverter side during controller interaction and the reactive power demand of the LCC converter during VDOCL operation on system recovery were analyzed. Based on the consideration of the controller and MMC dynamic reactive power support, the fault security region of the hybrid cascaded HVDC system under the coupling of multiple electrical quantities on the inverter side was quantitatively established.
Secondly, by comparing and analyzing the fault security region of the hybrid cascaded HVDC system and LCC-HVDC, a coordinated control strategy based on MMC and VDCOL is proposed. While fully utilizing the dynamic reactive power support capability of MMC, the VDCOL curve is adjusted in real-time based on current deviation, achieving coordination between subsequent commutation failure suppression and rapid and stable power recovery of the system.
Finally, a simulation comparative analysis was conducted based on PSCAD/EMTDC under different severity AC faults, different short circuit ratios, and different fault durations to verify the effectiveness of the proposed coordinated control strategy and the variation of active power transmitted to the receiving power grid is the main influencing factor for the generation of AC bus voltage phase advance. The simulation results show that compared to the coordinated control strategy without input and the reactive power control strategy with only input, the coordinated control strategy based on MMC and VDCOL proposed in this paper can not only effectively suppress subsequent commutation failures in hybrid cascaded HVDC system, but also achieve fast and stable power recovery, reduce the fluctuation of various electrical quantities during system faults, and accelerate the recovery process of the system. The increase of active power can be up to 109.61% under severe faults, which has obvious advantages and certain engineering application values.
keywords:Hybrid cascaded HVDC system, subsequent commutation failure, fault recovery period, fault security region, corrdinated control strategy
DOI:10.19595/j.cnki.1000-6753.tces.231310
中图分类号:TM72
国家自然科学基金资助项目(52207077)。
收稿日期 2023-08-14
改稿日期 2023-10-31
王 鹤 男,1983年生,教授,博士生导师,研究方向为柔性直流输电、新能源发电以及电力系统通信。E-mail:wanghe_nedu@163.com
边 竞 男,1994年生,讲师,硕士生导师,研究方向为柔性直流输电系统建模与仿真。E-mail:bj_jjj@163.com(通信作者)
(编辑 赫 蕾)