摘要 受动物触须传感机制的启发,结合铁镓合金(Galfenol)对物体表面纹理高度信息的优良感知能力,设计制作一种铁镓合金触须传感器单元,并将其集成为4×2 阵列。基于力学、电磁学理论和压磁方程建立了传感器单元输出电压模型,描述了输出电压与物体表面纹理高度的关系。实验测试了传感器单元的静态和动态特性。设计的传感器单元能够检测物体表面0.01~1.6 mm 纹理高度变化,灵敏度为243.3 mV/mm,且具有较快的响应时间(26 ms)和恢复时间(25 ms)。将传感器单元与阵列装载在机械手上滑过具有不同纹理的样品表面,利用输出电压波形可识别与重建样品表面纹理。结果表明,设计的传感器阵列能够高精度地感知物体表面纹理信息,进而指导机械手调整操作策略,完善人机交互过程。
关键词:铁镓合金 触须传感器 纹理识别 纹理重建
纹理信息的识别与重建对工作在非结构化环境中的机器人感知物体表面特征、调整操作策略具有重要意义。近年来,研究人员主要采用基于视觉[1-2]和触觉[3-4]的方法进行纹理信息感知。基于视觉的方法可以分析复杂纹理,但它们往往体积大、程序复杂,且易受外部坏境(低光照、雾气等)干扰。触须传感器作为触觉传感器的一种,是感知物体纹理的有效器件,可以克服上述缺点,且具有很高的精度和灵敏度。动物触须为哺乳动物提供了丰富的触觉信息,哺乳动物通常利用触须辨别物体的纹理[5]、形状[6],进行导航[7]和物体定位[8],尤其是在夜间或狭窄区域。受动物触须传感机制的启发,研究人员设计和开发了各种用于纹理、形状识别和探测的触须传感器。文献[9]设计了一种新型可变刚度多模态触须传感器,将触须传感器的振动动力学等效为欧拉-伯努利梁,通过控制毛囊的刚度和搅拌速度获得不同的振动频率,使机器人实时获取物体的纹理和几何信息。文献[10]将设计的触须-毛囊传感器在圆柱体和圆锥体上扫描以进行轮廓提取,传感器只需执行两次扫描即可获得物体的基本轮廓。文献[11]利用聚氨酯棒和石墨烯制作了一种用于检测水下涡流的触须传感器,在水下可以检测四个方向的阻力变化。文献[12]设计的触须传感器通过与物体表面进行反复短暂接触,实现了不同表面纹理的精确分类。尽管上述触须传感器在纹理感知方面做出了贡献,但它们缺乏对纹理高度信息的检测,高度方向上纹理信息的感知对智能机器人识别重建纹理和完善人机交互至关重要[13]。
铁镓合金(Galfenol)在受到外力作用时磁感应强度会发生明显变化[14],这种特性使得利用铁镓合金作为敏感材料的触须传感器检测纹理高度信息成为可能。另外,铁镓合金具有磁机转化率高、响应速度快、测量精度高、延展性好等优点[15-16],已被广泛用于制作触觉传感器。文献[17]设计了一种用于压力感知的铁镓合金触觉传感器阵列,可以实现对接触物体几何形状的检测。文献[18]设计了用于表面材料识别的手指状触觉传感器,实现了对五个相似纹理表面的分类。由于目前铁镓合金传感器结构等的限制,传感器在高度方向上的感知能力差,无法实现对物体表面纹理的识别与重建。
针对上述问题,本文基于逆磁致伸缩效应[19]、欧拉-伯努利梁理论和动物触须结构设计了用于纹理识别与重建的触须传感器单元和阵列。传感器单元响应时间快、测量精度和灵敏度高,具有良好的静态和动态性能,可以检测物体表面0.01~1.6 mm纹理高度变化,优于文献[20]中0.1~1.2 mm的纹理高度检测范围。将其装载在机械手上,滑过样品表面,利用输出电压波形可得到样品表面的纹理信息,从而实现样品表面纹理识别与重建。
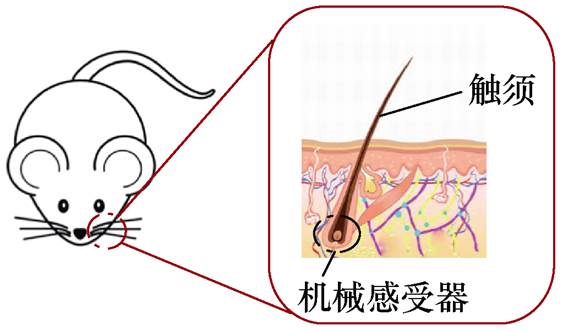
自然界中几乎所有哺乳动物都有一个用于对外部进行感知的触须系统,该系统由触须和富含感受器的毛囊组成[21]。当触须接触外界物体时,触须的形变使得毛囊内的机械感受器受到力的作用,并将机械刺激转化为电信号以供大脑进行处理。在夜间或自然光有限的环境中,基于触须的触觉刺激,动物们可以进行导航、捕食,并根据反馈到大脑的触觉信息对接触到物体的轮廓和纹理进行感知。老鼠的触须系统如图1a所示。受此启发,设计了用于纹理识别与重建的铁镓合金触须传感器单元,传感器单元由铁镓合金丝、永磁体、TMR磁传感器、底座和触头组成,如图1b所示。铁镓合金丝作为触须传感器单元的核心元件,尾端斜插在底座中构成悬臂梁结构,自由端嵌入触头与外界接触。触头由直径为1.5 mm、中心打有通孔的球形玛瑙石制成,其硬度较高,当受到力的作用时可将力快速传递给铁镓合金丝,改变周围磁感应强度的大小。铁镓合金丝(长16 mm,直径0.5 mm)类似于动物触须,具有良好的韧性和可恢复性。TMR磁传感器(TMR2003,尺寸为3 mm×3 mm×1.45 mm,SOT23-5封装)作为磁检测元件,相当于哺乳动物毛囊中的机械感受器。将TMR磁传感器的五个引脚与印制电路板(Printed Circuit Board, PCB)焊接,通过PCB的信号输出端采集传感器单元的输出电压。采用3D打印技术制成的底座尺寸为4 mm×4 mm×3.7 mm,后方开有两个0.8 mm×0.8 mm×1.3 mm的长方体槽,用于嵌入TMR磁传感器靠近底座一侧的两个引脚,从而尽可能地减小触须传感器单元尺寸。底座上方斜面放置有永磁体(NdFeB-N52,尺寸为4 mm× 1 mm×0.5 mm),为铁镓合金丝提供轴向偏置磁场。
(a)老鼠的触须系统
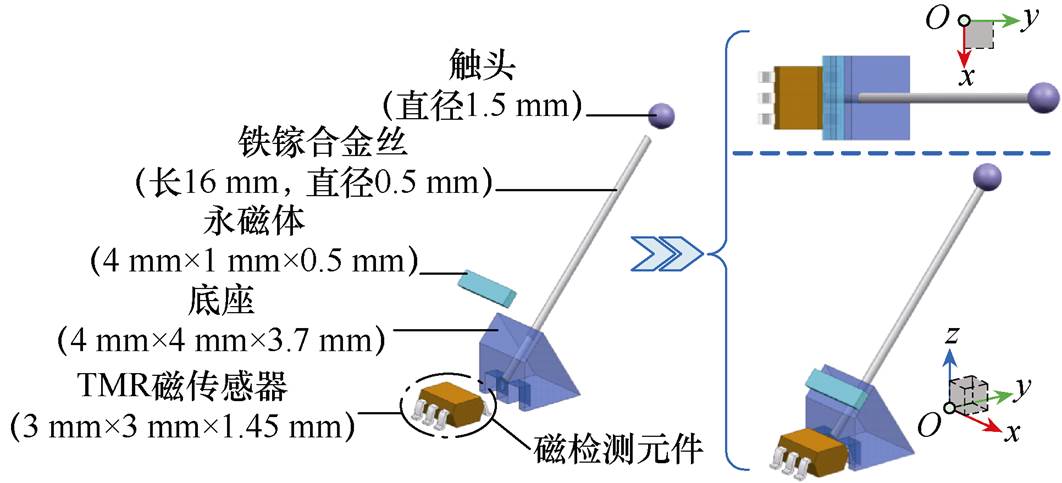
(b)传感器单元结构
图1 铁镓合金触须传感器单元设计
Fig.1 Design of Galfenol whisker sensor unit
为了使传感器单元工作在最佳状态,需要对偏置磁场的大小即永磁体的型号和铁镓合金丝的倾斜角度进行优化。首先对偏置磁场的大小进行优化,铁镓合金丝的倾斜角度初步设定为50°。优化过程采用COMSOL Multiphysics仿真和实验相结合的方式。由于所采用的TMR磁传感器的非饱和工作区间为-1.99~3.18 kA/m,为了使其工作在理想区间,设置永磁体的磁场强度H范围为40~80 kA/m。传感器单元输出电压U与样品纹理高度h、磁场强度H的关系如图2a所示,样品纹理高度h大小为0.5~1.5 mm。由图可知,当磁场强度为65 kA/m时传感器单元的输出和灵敏度最高,因此选择磁场强度为66.1 kA/m的永磁体提供偏置磁场。
在永磁体优化结果基础上,优化铁镓合金丝的倾斜角度q。倾斜角度从30°~60°变化,步长为10°,在0.5~1.5 mm纹理高度样品下不同倾斜角度铁镓合金丝的输出如图2b所示。传感器单元输出随着铁镓合金丝倾斜角度的增加而增大。根据文献[22],横向应力是引起铁镓合金丝产生逆磁致伸缩效应的主要因素。当倾斜角度为60°时,虽然传感器单元的输出最大,但受轴向应力影响也较大。综合考虑输出与轴向应力对传感器单元的影响,最终确定铁镓合金丝的倾斜角度为50°。
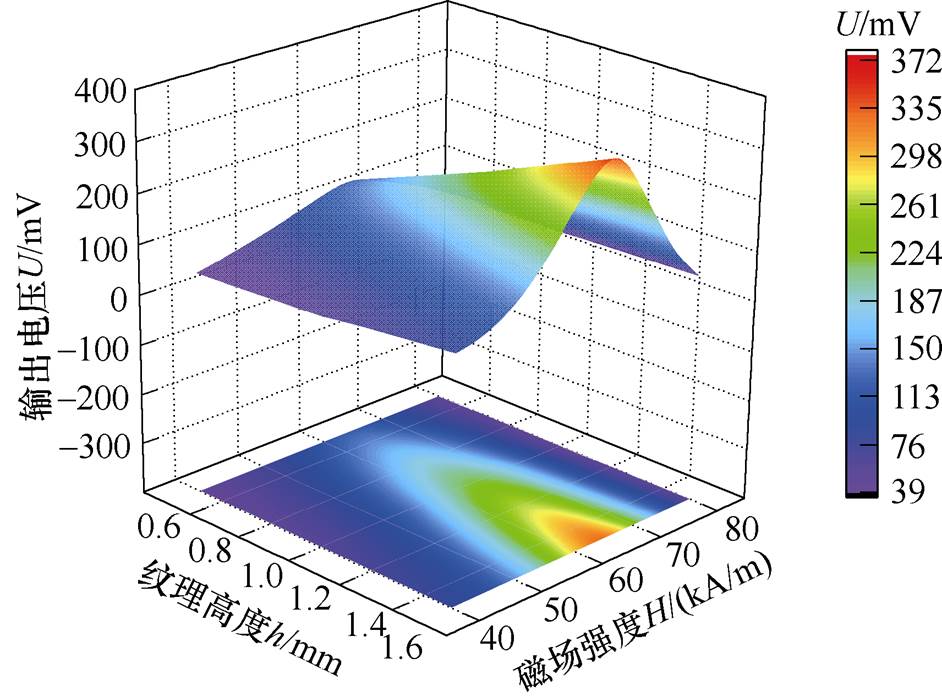
(a)不同纹理高度下磁场强度与输出电压关系
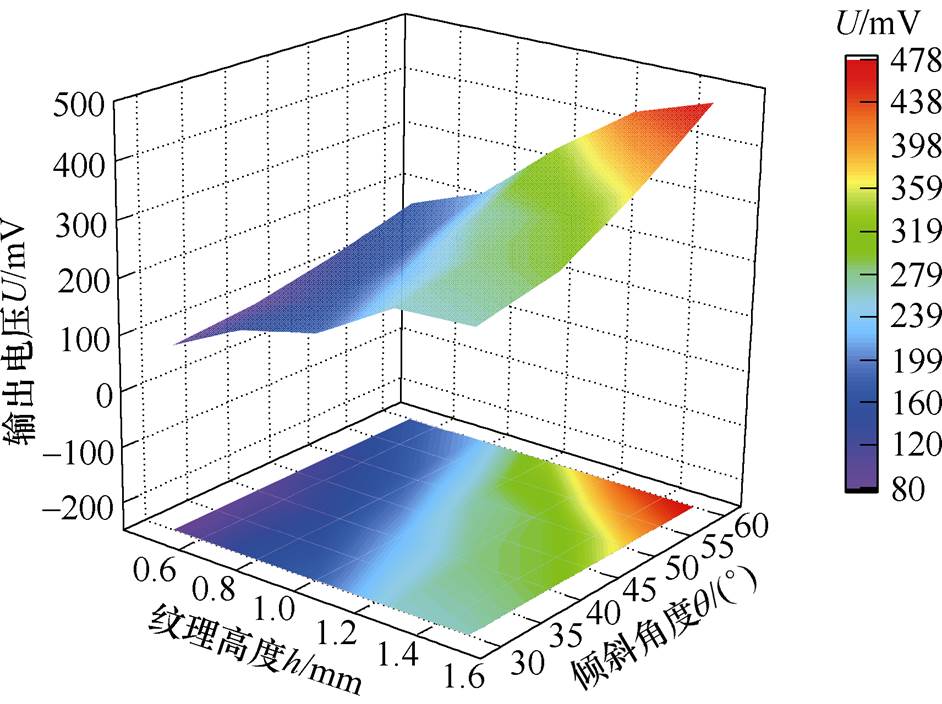
(b)不同纹理高度下倾斜角度与输出电压关系
图2 磁场强度与铁镓合金丝倾斜角度仿真结果
Fig.2 Simulation results of magnetic field intensity and tilt angle of Galfenol wire
优化后的传感器单元结构如图1b所示,总尺寸为13 mm×4 mm×13 mm。传感器单元具有结构尺寸小、易于安装、集成和扩展等优点,可直接装载在机械手上进行纹理信息感知。
对于大面积复杂物体表面纹理的测量,传感器单元测量的纹理信息有限,因此需要将传感器单元集成为阵列以满足测量需求。基于传感器单元设计了4×2传感器阵列,阵列结构如图3a所示。由于不同传感器单元之间磁场的相互干扰,若两行传感器单元距离过近则会影响其正常输出,因此需要合理设置阵列参数。经实验验证,当两行之间距离为14 mm、1号传感器单元在1 mm的纹理高度作用下时,输出电压为249.1 mV,与其相邻的2号和5号传感器单元输出电压分别为1号单元的0.8%和3.1%,影响较小。每行传感器单元在x轴方向相错1.2 mm,即相邻标号的传感器单元之间的横向距离均为1.2 mm,则所形成的传感器阵列平面分辨率为1.2 mm。通过减小在x轴方向每行传感器单元之间的距离并增加每列传感器单元的数量,可以进一步提高传感器阵列的平面分辨率和检测面积。制作的传感器阵列实物如图3b所示,传感器阵列的整体尺寸为56 mm×12.4 mm×14 mm,将制作的传感器阵列安装在电路板上,8个传感器单元共用电路板上的电源端和接地端,将电路板的信号端连接到数据采集卡,输出电压传输到PC上以供分析处理。
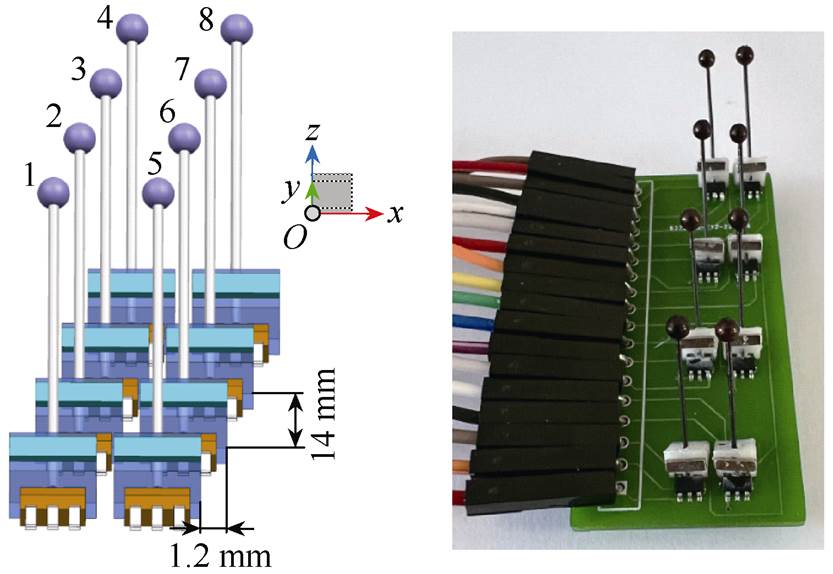
(a)传感器阵列示意图 (b)传感器阵列实物
图3 铁镓合金触须传感器阵列
Fig.3 Galfenol whisker sensor array
当外力施加在传感器单元触头上时,根据逆磁致伸缩效应,铁镓合金丝内部及周围的磁感应强度发生变化,该变化被TMR磁传感器检测到并转化为电压输出。TMR磁传感器采用差分输出,设UA和UB分别为差分输出的正、负电压,则TMR磁传感器的输出电压(即触须传感器单元输出电压)为
 (1)
(1)
设RH和RL分别为TMR磁传感器在正、反向磁饱和时的电阻值,RM为等效磁阻,RM、RH和RL之间的关系为
 (2)
(2)
UA和UB分别为
 (3)
(3)
 (4)
(4)
式中,US为输入电压;B1为TMR磁传感器处的磁感应强度;HS为饱和磁场强度;H0为初始磁场 强度。
整理式(1)~式(4),可得TMR磁传感器的输出电压为
 (5)
(5)
铁镓合金丝内部磁感应强度BGal与TMR磁传感器处磁感应强度B1之间的关系为
 (6)
(6)
式中,KC为铁镓合金丝内部磁感应强度与TMR磁传感器处磁感应强度之间的转换系数。
根据线性压磁方程有
 (7)
(7)
式中,d33为压磁系数;s 为应力;m 为铁镓合金丝的磁导率;H为偏置磁场强度。
由于铁镓合金丝横截面的几何尺寸远小于轴向几何尺寸,可将其视为简化的悬臂梁结构[23]。
以悬臂梁中性轴为x轴,垂直于悬臂梁的方向为z轴,假设磁场沿x轴均匀分布。当传感器单元受到竖直向下的外力F时,铁镓合金丝受力分析如图4所示。图4中q 为铁镓合金丝的倾角,q =50°,将F沿坐标轴分解。
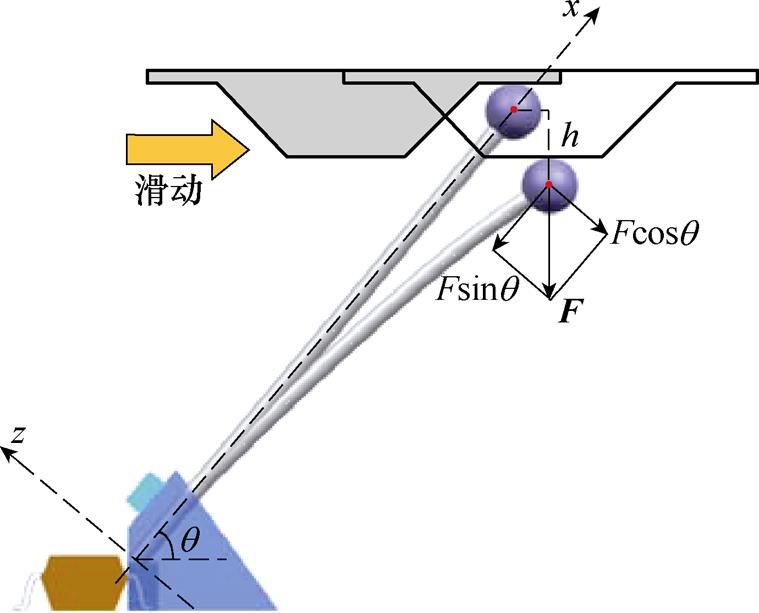
图4 铁镓合金丝受力分析
Fig.4 Analysis of force on Galfenol wire
由图4可知,当传感器单元检测高度为h的纹理时,悬臂梁自由端挠度为
 (8)
(8)
式中,E为杨氏模量;I为圆形截面惯性矩;l为悬臂梁长度。由式(8)可得
悬臂梁任意一点挠度w 与纹理高度h之间的关系为
 (9)
(9)
半径为R的圆形截面上惯性矩为
 (10)
(10)
在z点处应变为
 (11)
(11)
由胡克定律可知
 (12)
(12)
铁镓合金丝内部产生应力,沿铁镓合金丝方向的为轴向应力s1,垂直于铁镓合金丝方向的为横向应力s2。
轴向应力
 (13)
(13)
横向应力
 (14)
(14)
根据式(13)和式(14)可得
 (15)
(15)
由于横向应力远大于轴向应力,忽略轴向应力。将h=0时TMR磁传感器的输出电压Uref作为参考电压,整理式(1)~式(15)得
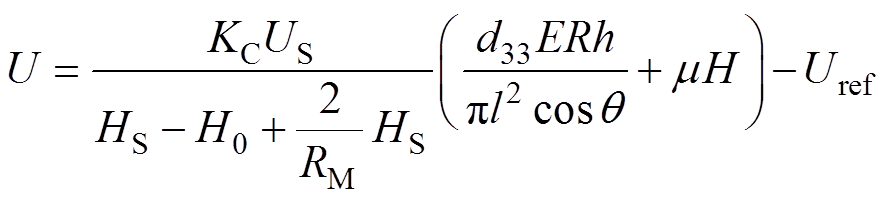 (16)
(16)
式(16)即可描述传感器单元输出电压U与被测纹理高度h之间的关系。传感器单元输出电压模型参数值见表1。
表1 模型参数值
Tab.1 Parameter values of the model
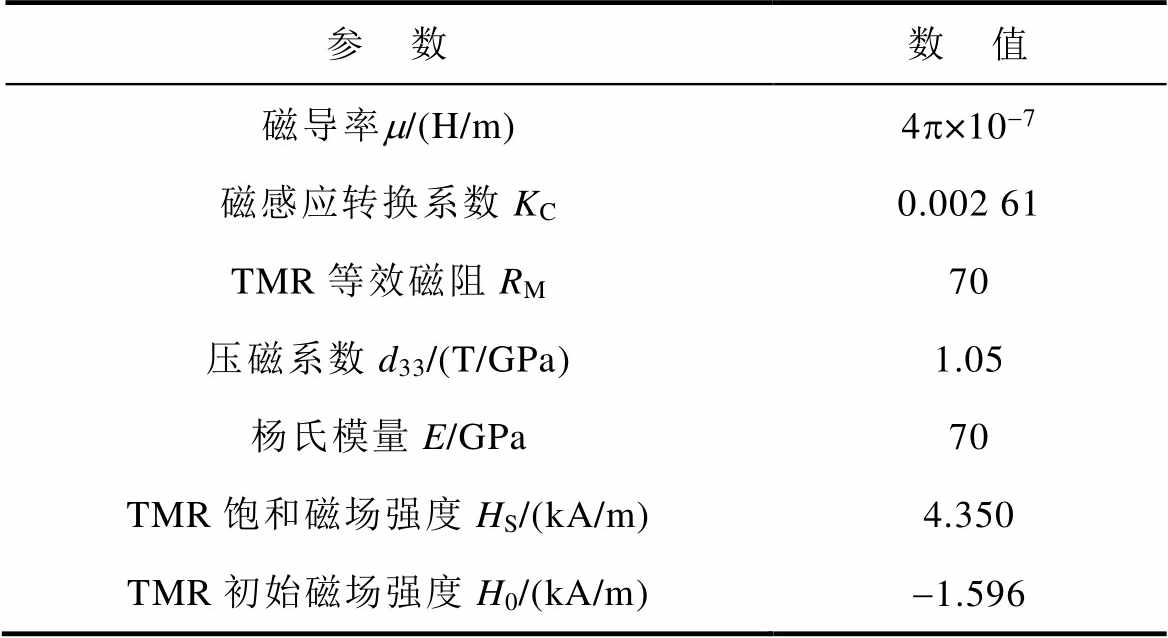
参 数数 值 磁导率m/(H/m)4p×10-7 磁感应转换系数KC0.002 61 TMR等效磁阻RM70 压磁系数d33/(T/GPa)1.05 杨氏模量E/GPa70 TMR饱和磁场强度HS/(kA/m)4.350 TMR初始磁场强度H0/(kA/m)-1.596
对铁镓合金触须传感器阵列的任一单元进行静态性能测试,测试系统如图5所示,包括向传感器单元施加不同力的数字测力计(HP-10)、获取传感器单元输出电压的数据采集卡(DH8301)和PC及直流稳压电源。
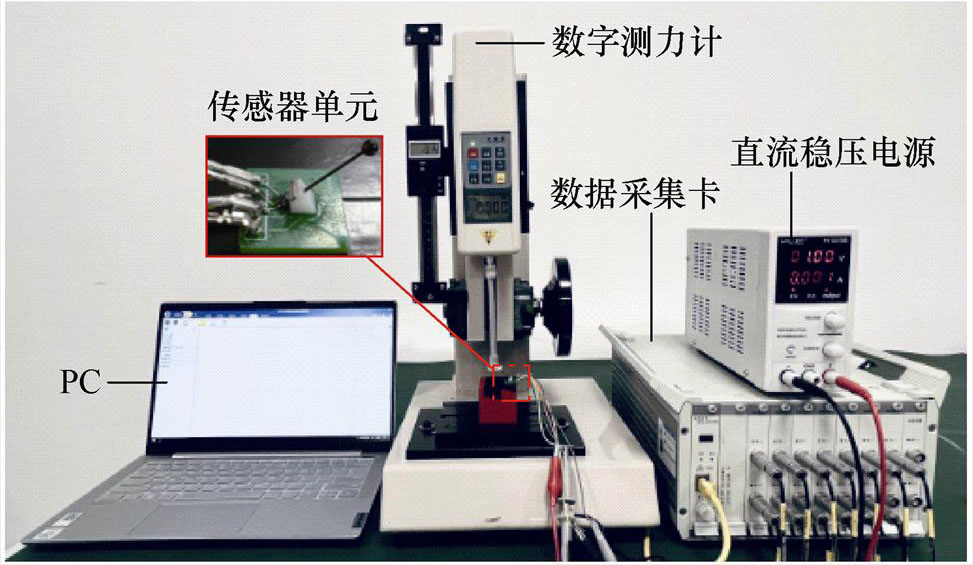
图5 传感器单元静态测试系统
Fig.5 Statictest system for sensor unit
由式(8)可知,传感器单元受力大小与被测纹理高度值为一一对应关系,通过转动数字测力计的摇杆,使测力计的传动杆垂直接触传感器单元触头,从而使不同的力作用于传感器单元,传感器单元受压后输出电压信号。图6a为在不同纹理高度样品下传感器单元的输出电压,从图中可以看出,当样品纹理高度为0.01 mm时传感器单元输出可区别于噪声的电压,表明本传感器单元可检测的最小纹理高度为0.01 mm。当样品纹理高度超过1.6 mm时,即使样品纹理高度不再作用于传感器单元,传感器单元仍有输出电压,说明此时铁镓合金丝产生了塑性形变,该塑性形变使得铁镓合金丝逆磁致伸缩效应减弱,传感器单元输出与理论模型也出现偏差。为了保证传感器单元测量的准确性和使用寿命,将纹理高度的测量范围定为0.01~1.6 mm。图6b为在不同纹理高度样品下输出电压实验值与理论输出模型计算值的对比,通过计算,传感器单元在0.01~1.6 mm范围内的灵敏度为243.3 mV/mm。
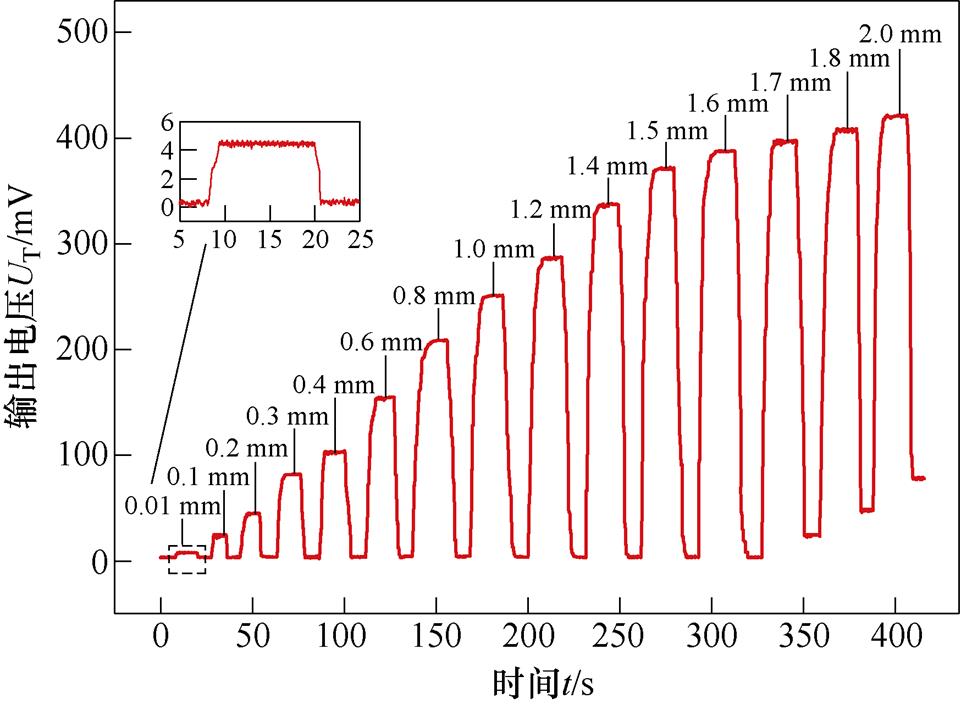
(a)不同纹理高度下传感器单元的输出电压
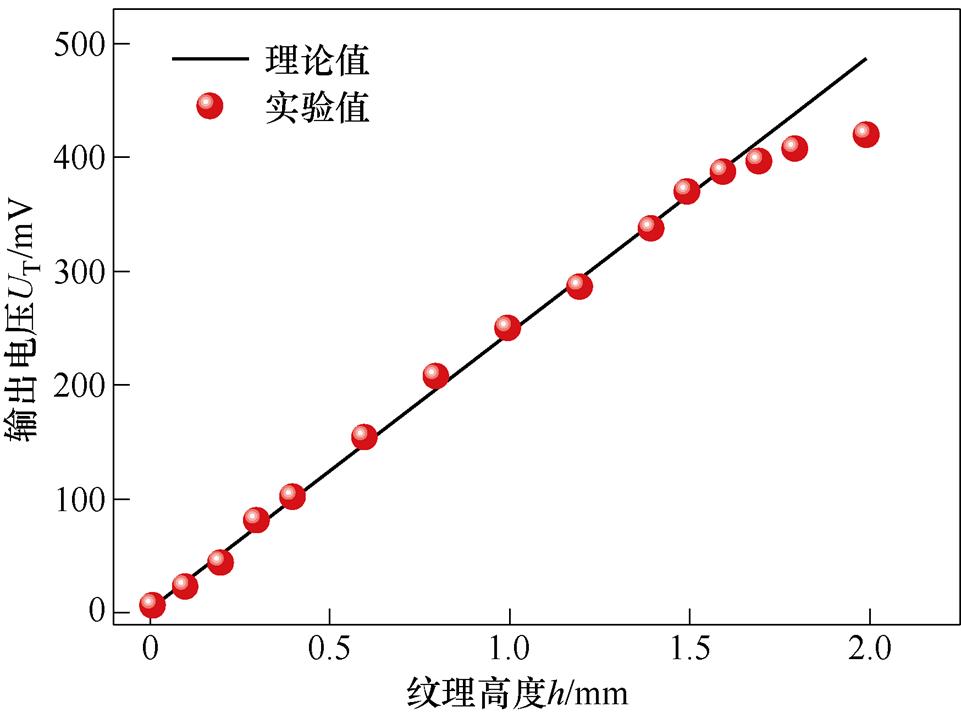
(b)实验值与理论值对比
图6 传感器单元静态输出电压
Fig.6 S tatic output voltage of sensor unit
传感器单元动态性能测试系统如图7所示,包括动态力施加装置、数据采集卡、PC、直流稳压电源。动态力施加装置由信号发生器(AFG2021-SC)、功率放大器(MB500VI)和激振器(MODAL50)组成。信号发生器产生频率为6 Hz的方波力信号,该信号通过功率放大器传输至激振器并作用于传感器单元,激振器顶端安装有配套的石英力传感器(Kistler-9173B),通过石英力传感器的输出对施加到本传感器单元上的力进行监测。响应时间定义为传感器单元从初始状态到峰值状态所需的时间,恢复时间为传感器单元从峰值状态返回初始状态所需的时间。较快的响应时间和恢复时间对传感器单元迅速而精准地感知物体表面纹理信息至关重要。传感器单元在方波力信号作用下的输出如图8所示,由图8中第一个输出电压波形的放大图可知,传感器单元的响应时间和恢复时间分别为26 ms和25 ms,优于由碳纳米材料(响应时间和恢复时间均为40 ms)[24]和石墨笔画纸(响应时间和恢复时间分别为50 ms和76 ms)[25]制成的电子触须。在50次重复性测试中输出波形具有一致性,传感器单元性能保持稳定,表明传感器单元具有良好的动态性能与可靠性。

图7 传感器单元动态测试系统
Fig.7 Dynamictest system for sensor unit
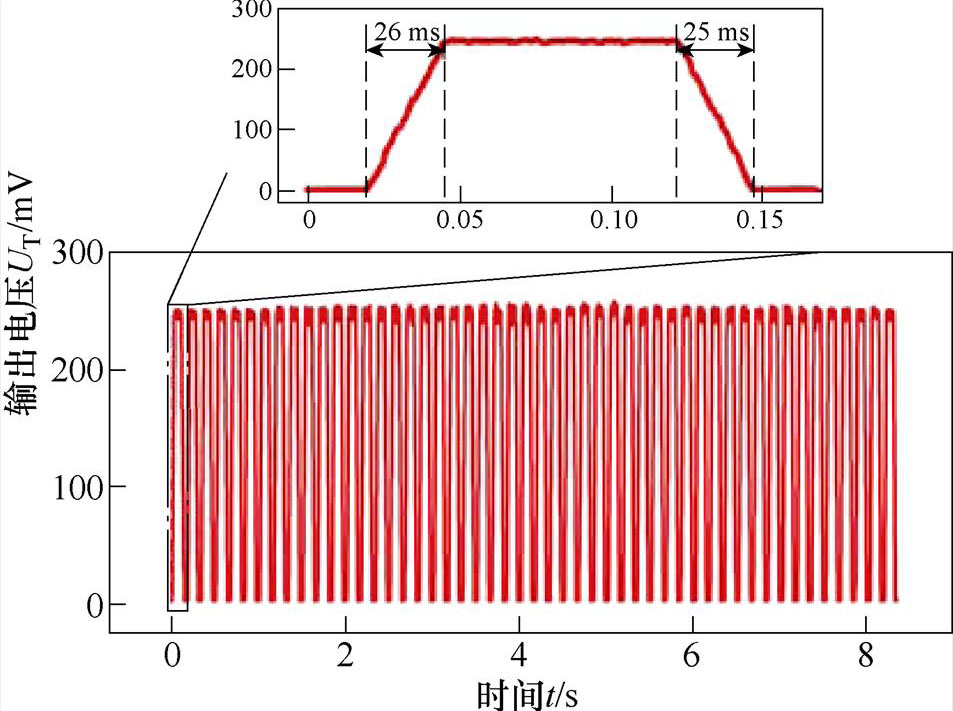
图8 传感器单元动态响应
Fig.8 Dynamic response of sensor unit
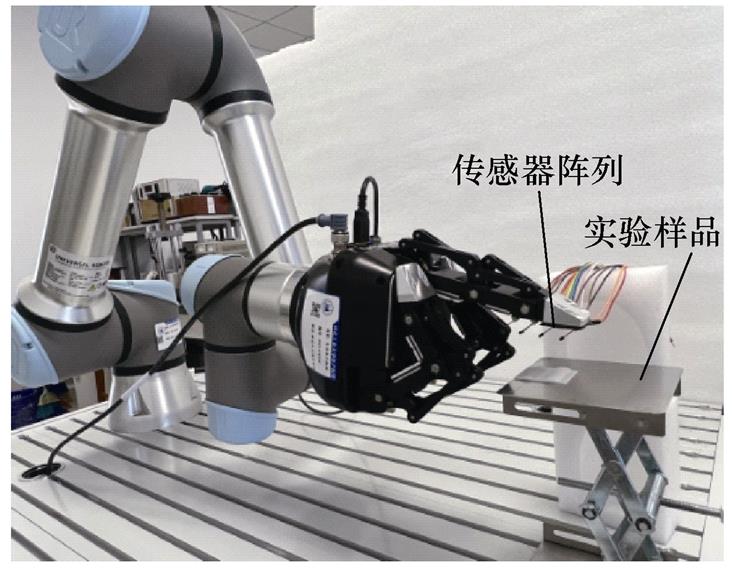
实验平台由机械臂(Universal Robots UR5e)、机械手(Robotiq)和载物台组成,传感器单元安装在机械手的指节上,机械手通过法兰与机械臂建立连接。实验样品安装在载物台上且放置于传感器单元正下方,使样品底面恰好接触传感器单元触头,通过软件控制机械手移动,使传感器单元触头平行滑过实验样品表面,实验过程如图9所示,通过传感器单元的输出进行表面纹理识别与重建。
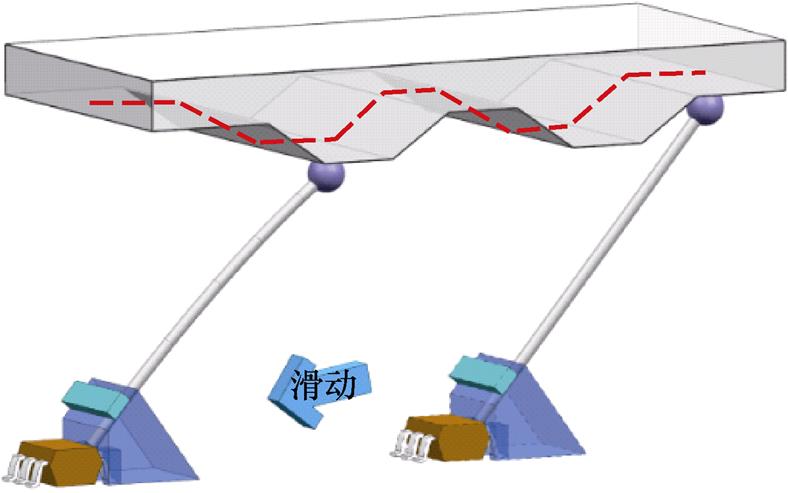
图9 实验过程示意图
Fig.9 Schematic diagram of the experimental process
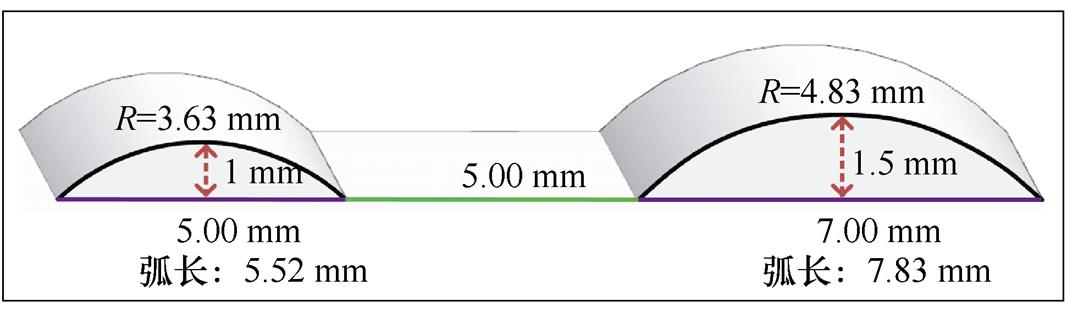
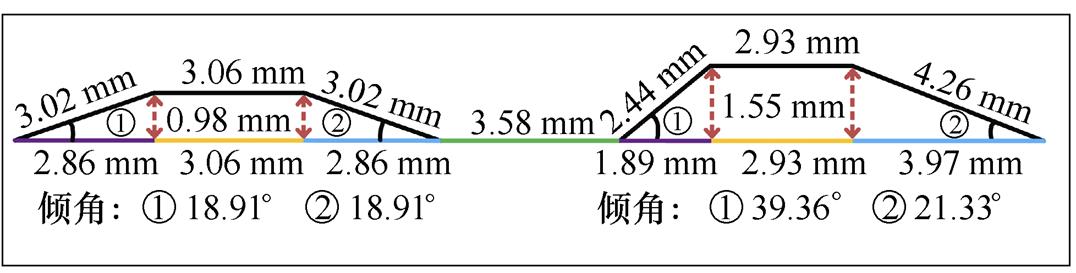
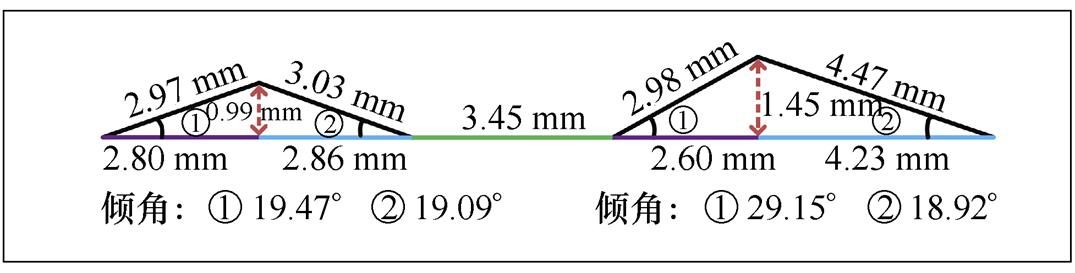
选择合适的传感器单元滑动速度对于得到理想的输出电压至关重要。当滑动速度较慢时,得到的纹理信息精度较高,但受机械手和机械臂振动影响大且效率较低;当速度较快时,工作效率较高,但所得纹理信息精度较差,甚至会丢失一些纹理信息。在避免机械手和机械臂振动影响的前提下,权衡精度与工作效率的关系,最终选择6.5 mm/s作为纹理识别与重建时的滑动速度。为了得到较精确的纹理信息且数据量不至于过大,采用100 Hz作为实验的采样频率。实验样品采用3D打印技术制成,包括梯形、三角形、圆弧形三类。各类样品的实际参数标注于图10a中。传感器单元滑过各类样品时的输出电压波形如图10b所示,当传感器单元分别滑过梯形、三角形和圆弧形样品时,输出电压波形呈现出与样品纹理相对应的形状且区分度明显,即输出电压波形也为梯形、三角形和圆弧形,通过输出电压波形对所测样品纹理进行识别,将其判断为梯形、三角形或圆弧形。根据滑动过程中传感器单元不同时刻的输出并基于识别出的样品纹理几何结构,利用相应的几何计算公式可以重建样品表面纹理。
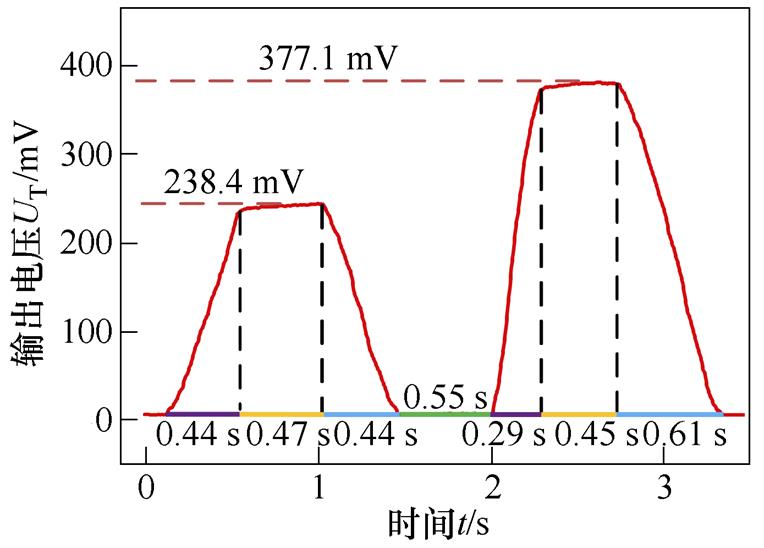
梯形样品底边被划分为左底边(紫色)、中底边(橙色)、右底边(蓝色)三部分,传感器单元以6.5 mm/s的速度滑过梯形样品时,样品不同部分底边的长度可以通过输出电压波形中对应部分的持续时间乘以速度得到。根据图10b中的梯形输出电压波形计算出的两个梯形左底边、中底边和右底边的长度分别为2.86 mm(0.44 s×6.5 mm/s)、3.06 mm(0.47 s×6.5 mm/s)、2.86 mm(0.44 s×6.5 mm/s)和1.89 mm(0.29 s×6.5 mm/s)、2.93 mm(0.45 s× 6.5 mm/s)、3.97 mm(0.61 s×6.5 mm/s)。通过输出电压波形的峰值均值(238.4 mV和377.1 mV),结合式(16),可以得到两个梯形样品的纹理高度分别为0.98 mm和1.55 mm。获得上述两个纹理参数后,通过 、和
、和 、
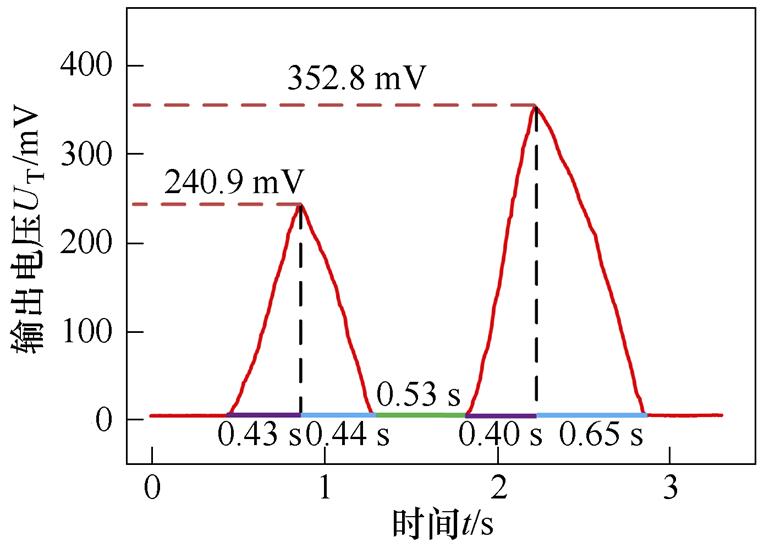
、 ,可以得出两个梯形的倾角分别为18.91°、18.91°和39.36°、21.33°。最后,根据勾股定理可以得出两个梯形斜边的长度,分别为3.02 mm、3.02 mm和2.44 mm、4.26 mm。传感器单元滑过三角形样品时的输出如图10b中三角形输出电压波形所示,采用相同的方法可以对三角形样品进行纹理重建,梯形和三角形样品纹理重建结果如图10c上图和中图所示。
,可以得出两个梯形的倾角分别为18.91°、18.91°和39.36°、21.33°。最后,根据勾股定理可以得出两个梯形斜边的长度,分别为3.02 mm、3.02 mm和2.44 mm、4.26 mm。传感器单元滑过三角形样品时的输出如图10b中三角形输出电压波形所示,采用相同的方法可以对三角形样品进行纹理重建,梯形和三角形样品纹理重建结果如图10c上图和中图所示。
(a)标注参数尺寸的不同纹理样品
(b)传感器单元输出电压波形
(c)纹理重建结果
图10 传感器单元滑过具有不同表面纹理样品时的输出电压波形与纹理重建
Fig.10 Output voltage waveform and texture reconstruction when the sensor unit slides over samples with different surface textures
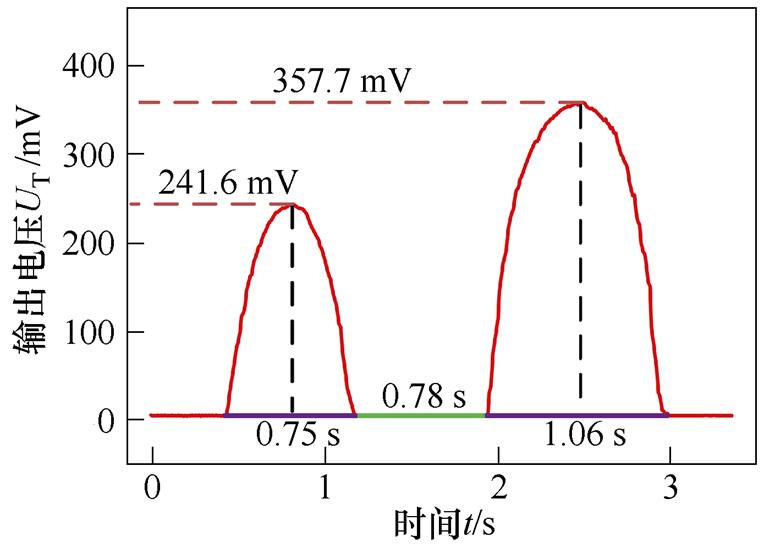
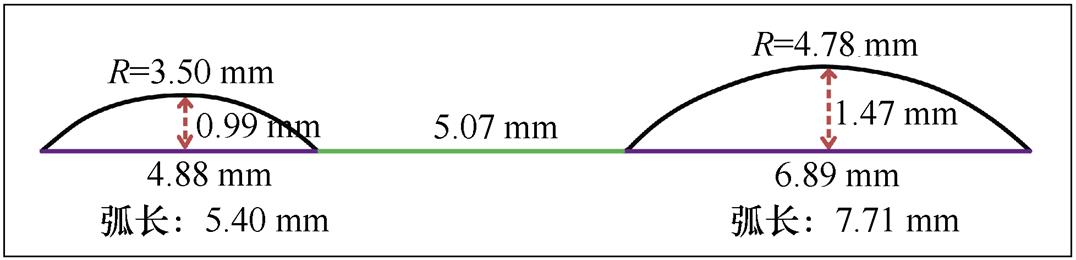
除了对梯形和三角形样品进行纹理重建外,对圆弧形样品也进行了相关实验。根据图10b圆弧形输出电压波形,通过计算持续时间乘以速度,得到两个圆弧形底边的长度分别为4.88 mm(0.75 s× 6.5 mm/s)和6.89 mm(1.06 s×6.5 mm/s),根据输出电压波形峰值(241.6 mV和357.7 mV),可以得出两个圆弧形样品的纹理高度分别为0.99 mm和1.47 mm。得到底边长度和纹理高度两个参数后,根据几何学可以计算出两个圆弧的弧长以及对应圆的半径,分别为5.40 mm、7.71 mm和3.50 mm、4.78 mm。圆弧形纹理重建结果如图10c下图所示。滑过三角形和圆弧形样品时输出电压波形具有一定的相似性,均是单调增加到峰值后再减小至零。但从图10b可以看出,滑过圆弧形样品时输出电压波形切线斜率会不断变化,曲线更加圆润,说明设计的传感器单元可以精确捕捉物体表面纹理高度方向上的信息,并可根据输出电压波形识别与重建多种表面纹理。
上述实验得到了物体表面纹理的二维信息,为了实现表面纹理的三维重建,将4×2传感器阵列装载于机械手,进行三维纹理重建实验。实验采用“工”字形样品,如图11a和图11b所示,该样品由梯形和圆弧形纹理构成。将样品固定在载物台上,通过软件控制机械臂与机械手的移动,使传感器阵列8个单元平行滑过实验样品,实验平台如图11c所示。
将各个传感器单元的输出电压整合到同一时间轴下,整合后的阵列输出电压波形如图12a所示。利用上述二维纹理重建方法对每个单元的输出电压进行处理,将得到的各个二维纹理曲线连接延展为三维纹理曲面,结果如图12b所示。得到的三维纹理重建结果与样品实际表面纹理具有较高的一致性,复现出了样品表面纹理,表明设计的传感器阵列可以应用于三维表面纹理识别与重建领域。此外,设计的传感器阵列具有测量精度高、响应速度快、易于制作、尺寸小、轻量化、环境友好等优点,使得该传感器阵列在人工智能和人机交互等领域具有广阔的应用前景。
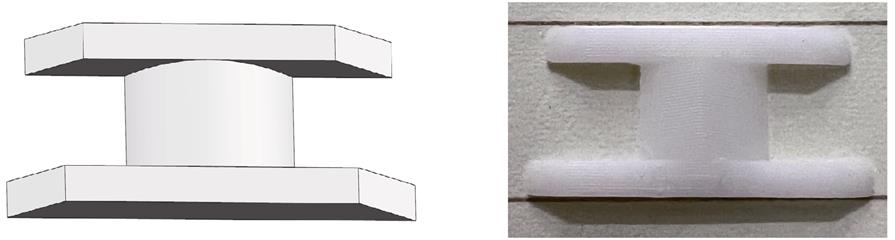
(a)工字形样品示意图 (b)工字形样品实物图
(c)实验平台
图11 三维纹理重建实验样品与实验平台
Fig.11 3D texture reconstruction samples and experimental platform
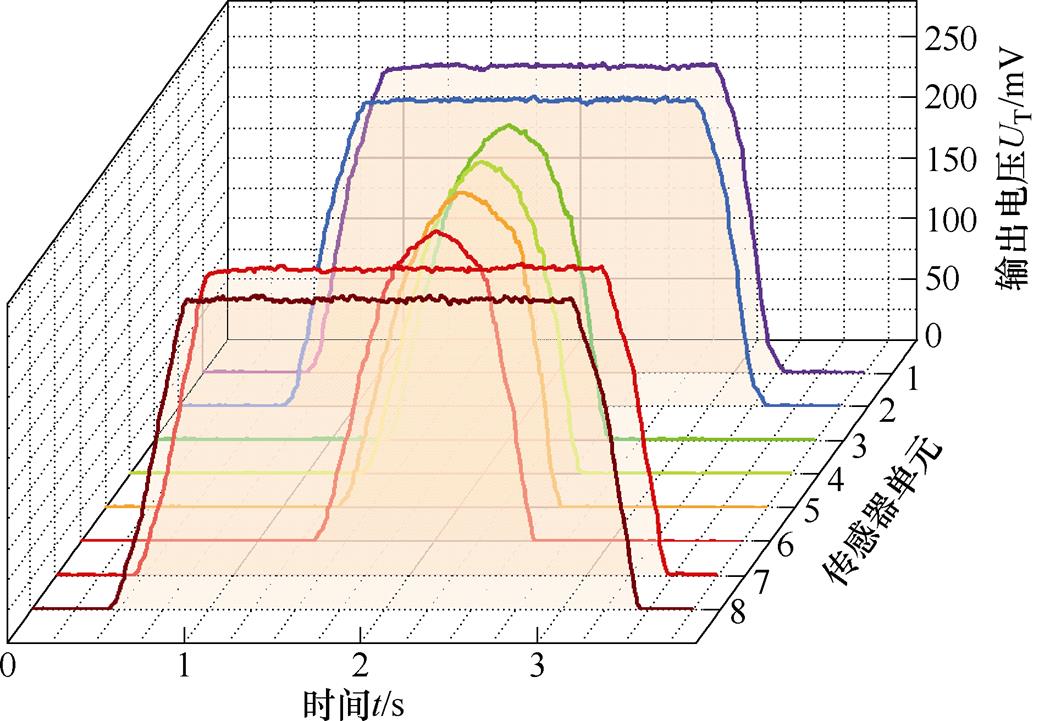
(a)传感器阵列输出电压波形
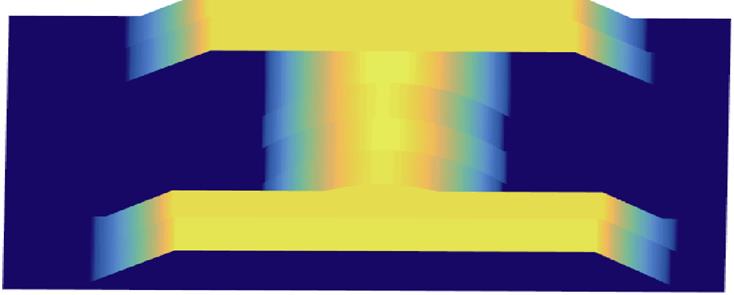
(b)三维纹理重建结果
图12 传感器阵列三维纹理重建
Fig.12 Sensor array 3D texture reconstruction
受动物触须传感机制的启发,结合铁镓合金丝对高度方向上触觉信息的优良感知能力,设计并制作了用于纹理识别与重建的触须传感器单元与4×2传感器阵列。建立了传感器单元输出电压模型。该传感器单元可以检测物体表面纹理0.01~1.6 mm的高度变化,灵敏度为243.3 mV/mm。测试了传感器单元的静态和动态性能,响应时间和恢复时间分别为26 ms和25 ms,且具有良好的重复性。通过采用逆磁致伸缩效应更加明显、机电耦合效率更高的合金材料和精度更高的磁传感器,将来有望进一步提高传感器单元和阵列的各项性能。将传感器单元与阵列分别装载在机械手上进行样品表面滑动实验,利用采集的输出电压识别与重建了样品表面纹理,表明该传感器阵列能够感知物体表面精细特征。设计的触须传感器单元和阵列对指导机械手调整操作策略、完善人机交互过程等具有重要意义。
参考文献
[1] Yuan Wenzhen, Dong Siyuan, Adelson E H. Gelsight: high-resolution robot tactile sensors for estimating geometry and force[J]. Sensors, 2017, 17(12): 2762.
[2] Ward-Cherrier B, Pestell N, Lepora N F. NeuroTac: a neuromorphic optical tactile sensor applied to texture recognition[C]//2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 2020: 2654-2660.
[3] Prasad A, Sebastian S, Asokan S. FBG tactile sensor for surface thickness and shape measurement[J]. IEEE Sensors Journal, 2021, 21(9): 10695-10702.
[4] Cao Yudong, Li Tie, Gu Yang, et al. Fingerprint- inspired flexible tactile sensor for accurately dis- cerning surface texture[J]. Small, 2018, 14(16): 1703902.
[5] Chen J L, Carta S, Soldado-Magraner J, et al. Behaviour-dependent recruitment of long-range pro- jection neurons in somatosensory cortex[J]. Nature, 2013, 499(7458): 336-340.
[6] Pearson M J, Salman M. Active whisker placement and exploration for rapid object recognition[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019: 672-677.
[7] Sayegh M A, Daraghma H, Mekid S, et al. Review of recent bio-inspired design and manufacturing of whisker tactile sensors[J]. Sensors, 2022, 22(7): 2705.
[8] Clements T N, Rahn C D. Three-dimensional contact imaging with an actuated whisker[J]. IEEE Transa- ctions on Robotics, 2006, 22(4): 844-848.
[9] Wegiriya H, Herzig N, Abad S A, et al. A stiffness controllable multimodal whisker sensor follicle for texture comparison[J]. IEEE Sensors Journal, 2019, 20(5): 2320-2328.
[10] Emnett H M, Graff M M, Hartmann M J Z. A novel whisker sensor used for 3D contact point deter- mination and contour extraction[C]//Robotics: Science and Systems, Pittsburgh, USA, 2018.
[11] Gul J Z, Su K Y, Choi K H. Fully 3D printed multi- material soft bio-inspired whisker sensor for underwater-induced vortex detection[J]. Soft Robotics, 2018, 5(2): 122-132.
[12] Sullivan J C, Mitchinson B, Pearson M J, et al. Tactile discrimination using active whisker sensors[J]. IEEE Sensors Journal, 2011, 12(2): 350-362.
[13] Shin K, Kim D, Park H, et al. Artificial tactile sensor with pin-type module for depth profile and surface topography detection[J]. IEEE Transactions on Indu- strial Electronics, 2019, 67(1): 637-646.
[14] 李云开, 王博文, 张冰. 铁镓合金的压磁效应与力传感器的研究[J]. 电工技术学报, 2019, 34(17): 3615-3621.
Li Yunkai, Wang Bowen, Zhang Bing. Study on piezomagnetic effect of Galfenolalloy and force sensor[J]. Transactions of China Electrotechnical Society, 2019, 34(17): 3615-3621.
[15] 翁玲, 常振, 孙英, 等. 不同磁致伸缩材料的高频磁能损耗分析与实验研究[J]. 电工技术学报, 2020, 35(10): 2079-2087.
Weng Ling, Chang Zhen, Sun Ying, et al. Analysis and experimental study on high frequency magneto- strictive energy loss of different magnetostrictive materials[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2079-2087.
[16] 翁玲, 高绍阳, 王博文, 等. 用于检测压力与刚度的柔性磁致伸缩触觉传感器阵列[J]. 仪器仪表学报, 2020, 41(9): 110-120.
Weng Ling, Gao Shaoyang, Wang Bowen, et al. Flexible magnetostrictive tactile sensor array for pressure and stiffness detection[J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 110-120.
[17] Gao Shaoyang, Weng Ling, Deng Zhangxian, et al. Biomimetic tactile sensor array based on magneto- strictivematerials[J]. IEEE Sensors Journal, 2021, 21(12): 13116-13124.
[18] Zheng Wendong, Wang Bowen, Liu Huaping, et al. Bio-inspired magnetostrictive tactile sensor for surface material recognition[J]. IEEE Transactions on Magnetics, 2019, 55(7): 1-7.
[19] 黄珊, 王博文, 赵智忠, 等. 应用于机械手的磁致伸缩触觉传感器阵列与物体识别[J]. 电工技术学报, 2021, 36(7): 1416-1424.
Huang Shan, Wang Bowen, Zhao Zhizhong, et al. Object recognition of magnetostrictive tactile sensor array applied to manipulator[J]. Transactions of China Electrotechnical Society, 2021, 36(7): 1416-1424.
[20] Zhou Qian, Ji Bing, Hu Fengming, et al. Magnetized microcilia array-based self-powered electronic skin for micro-scaled 3D morphology recognition and high-capacity communication[J]. Advanced Functional Materials, 2022, 32(46): 2208120.
[21] Luo Yifu, Bresee C S, Rudnicki J W, et al. Con- straints on the deformation of the vibrissa within the follicle[J]. PLoS Computational Biology, 2021, 17(4): e1007887.
[22] Li Yunkai, Wang Bowen, Li Yuanyuan, et al. Design and output characteristics of magnetostrictive tactile sensor for detecting force and stiffness of manipulated objects[J]. IEEE Transactions on Industrial Infor- matics, 2018, 15(2): 1219-1225.
[23] 刘莎莎, 王博文, 黄文美, 等. 仿生磁致伸缩触觉传感阵列设计与输出特性[J]. 电工技术学报, 2021, 36(12): 2576-2584.
Liu Shasha, Wang Bowen, Huang Wenmei, et al. Design and output characteristic of bionic magneto- strictive tactile sensor array[J]. Transactions of China Electrotechnical Society, 2021, 36(12): 2576-2584.
[24] Xie Ruijie, Zhu Jingyu, Wu Haibo, et al. 3D- conductive pathway written on leather for highly sensitive and durable electronic whisker[J]. Journal of Materials Chemistry C, 2020, 8(28): 9748-9754.
[25] Hua Qilin, Liu Haitao, Zhao Jing, et al. Bioinspired electronic whisker arrays by pencil-drawn paper for adaptive tactile sensing[J]. Advanced Electronic Materials, 2016, 2(7): 1600093.
Abstract The recognition and reconstruction of texture information is significant for robots working in unstructured environments to perceive surface features and adjust operational strategies. As a tactile sensor, the whisker sensor is an effective device for high-precision texture perception of objects because it is not affected by ambient light and unstructured environments and can collect surface texture information of objects through direct contact. Therefore, this paper used a novel magnetostrictive material, Galfenol, to design a whisker sensor unit and array. The output characteristics of the sensor array were analyzed using static and dynamic performance test systems, and it was loaded onto the manipulator for object surface texture recognition and reconstruction.
Inspired by the sensing mechanism of animal whiskers and combined with the excellent sensing ability of Galfenol wire on surface texture height information, a Galfenol whisker sensor unit was designed and fabricated. Based on the theory of mechanics, electromagnetism, and piezomagnetic equation, the output voltage model of the whisker sensor unit was established, and the relationship between the output voltage and the surface texture height was described. The parameters of the sensor unit were determined by simulation optimization. A permanent magnet with a magnetic field intensity of 66.1 kA/m was used to provide a bias magnetic field, and Galfenol wire with a length of 16 mm and a tilt angle of 50° was used. The size of the sensor unit is 13 mm×4 mm×13 mm. In order to measure the surface texture of large and complex objects, a 4×2 sensor array was designed based on the sensor unit. The transverse and longitudinal distances between the units in the array are 1.2 mm and 14 mm, respectively. The planar resolution of the array is 1.2 mm. According to different requirements, expanding the array can improve the planar resolution and detection area. The output characteristics of the sensor array were tested by establishing static and dynamic performance test systems. The detection range of the texture height of the sensor unit is determined to be 0.01~1.6 mm, with a sensitivity of 243.3 mV/mm. The repeatability, response, and recovery time of the sensor unit were characterized by a 6 Hz square-wave force signal. The response and recovery time are 26 ms and 25 ms, respectively. The output voltage waveforms of the sensor unit were consistent in the 50-cycle test, indicating good dynamic performance and reliability.
The experimental platform of texture recognition and reconstruction was built. The sensor unit was used to slide over the trapezoidal, triangular, and arc-shaped samples at a speed of 6.5 mm/s. The samples were identified by the shape of the output voltage waveforms. The surface two-dimensional textures of the samples were reconstructed using geometric formulas based on the output at different moments during the sliding process. The sensor array was installed onto the manipulator, sliding over the sample with a three-dimensional shape. The three-dimensional texture of the sample was reconstructed successfully through the output voltage. It is shown that the designed sensor array can be used surface texture recognition and reconstruction, thus providing more tactile information references for robots to perceive the environment.
keywords:Galfenol, whisker sensor, texture recognition, texture reconstruction
中图分类号:TP212
DOI: 10.19595/j.cnki.1000-6753.tces.222171
国家自然科学基金(52077052, 52377007)、中央引导地方科技发展资金(226Z1704G)、河北省自然科学基金(E2022202067)和河北省高等学校科学研究(JZX2023011)资助项目。
收稿日期 2022-11-14
改稿日期 2023-02-15
翁 玲 女,1978年生,博士,教授,研究方向为新型磁性材料与智能器件。E-mail: llweng@163.com(通信作者)
罗 旭 男,1996年生,硕士研究生,研究方向为新型磁性材料与智能器件。E-mail: 396782338@qq.com
(编辑 郭丽军)