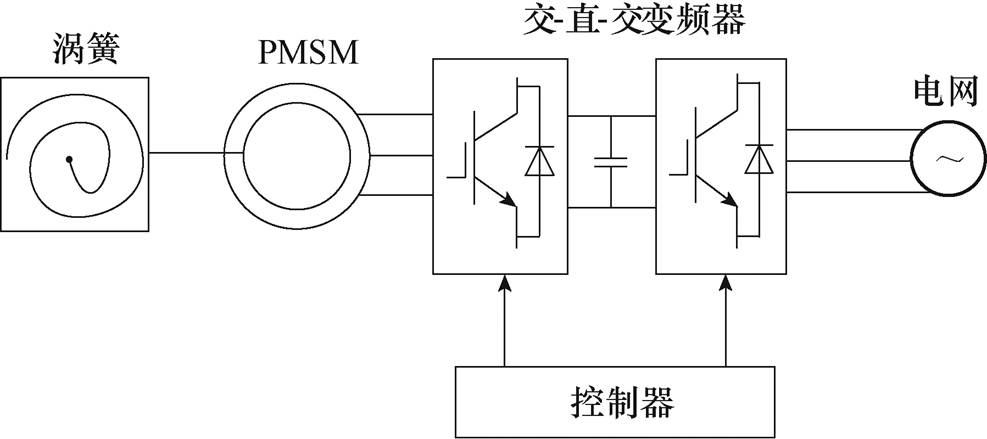
图1 MEES系统结构
Fig.1 Structure diagram of MEES system
摘要 针对柔性涡簧振动和电力电子装置等引起机械弹性储能(MEES)系统机械侧谐波难以准确建模、多源谐波无法整体表征及统一抑制的问题,该文提出MEES用永磁同步电机多源谐波提取及统一抑制方法。首先,建立MEES系统数学模型,利用电机转速谐波对多源谐波进行整体表征;然后,提出融合奇异值差分的矩阵束算法,利用其对含噪实测转速数据进行处理以获取包含不同频率成分的多源谐波信息;最后,设计定子电流矢量定向下基于反推控制的多源谐波统一抑制算法,完成对不同频率成分谐波的同时抑制。仿真和实验结果表明,利用融合奇异值差分的矩阵束算法能快速、准确地识别转速信号中的多源谐波成分,统一抑制算法有效降低了多源谐波导致的电磁转矩脉动,改善了系统运行性能。
关键词:机械弹性储能 永磁同步电机 矩阵束算法 多源谐波提取及抑制 反推控制
“双碳”目标下,间歇式新能源在提供低碳电力的同时,其出力不确定性也给电力系统调度带来了极大困难。以机械涡卷弹簧(以下简称“涡簧”)为储能介质,永磁同步电机(Permanent Magnet Synchronous Machine, PMSM)和电力电子装置作为驱动部件的新型机械弹性储能(Mechanical Elastic Energy Storage, MEES)系统,为维持新能源接入电网后的功率平衡提供了良好手段[1]。不过,作为机电耦合系统,由柔性涡簧振动激发的机械侧谐波和电力电子装置等电气设备产生的电气侧谐波[2-3],使MEES系统表现出较为复杂的多源谐波问题,削弱了系统运行性能。准确提取系统多源谐波信息并开展多源谐波抑制,是改善MEES系统运行性能的重要内容。
当前,对于融合机械侧谐波和电气侧谐波的PMSM多源谐波建模分析,通常是在机械和电气两侧分别予以表征。对于机械侧谐波,主要有矢量力学、分析力学和Kane法三种方法,如文献[4]通过混合坐标系分析了涡簧振动模态,并采用Lagrange方程建立了考虑一阶模态的PMSM驱动涡簧动力学模型,现有针对机械侧谐波的建模方法较为繁杂,实践中能处理的谐波次数也有限。对于电气侧谐波,其影响一般通过电机电磁转矩脉动予以描述,如文献[5]通过对PMSM电磁转矩脉动进行建模,进而完成电气侧谐波的表达。只是,一些研究已经揭示了机械侧谐波和电气侧谐波存在着相互关联的事实[6],机械侧负载振动激发的谐波将通过机电耦合原理引发同频率下驱动电机的转速波动和电磁转矩脉动[7],同样地,由电气侧谐波引起的电机电磁转矩脉动也将导致电机转速波动[8],故将多源谐波单独进行表征,不仅使建模问题复杂化,而且可能会割裂多源谐波的内在联系,造成对多源谐波影响机电耦合系统运行机理的认识偏差。其实,多源谐波的相互作用最终都会以机电耦合的形式体现于PMSM的转速和电磁转矩上,诱发电机转速波动和电磁转矩脉动。因此,透过转速和电磁转矩去融合表达多源谐波信息为多源谐波整体抑制提供了一种新思路。
对于多源谐波提取算法,常用的有Prony法[9]、奇异值分解法[10]以及它们的改进算法,在实际应用中发现,奇异值分解法的抗噪能力较Prony法更强,不过此类算法均未从根本上解决抗噪问题。矩阵束算法是T. K. Sarkar等提出的一种使用子空间旋转不变性以提取系统参数的算法[11-12],由于其采用内积形式提高了抗噪能力,对于含噪能量较小的高信噪比系统,在提取有用信号的同时,可滤除大部分噪声,具备较好的去噪效果[13],已在电磁场、雷达以及阵列等诸多信号提取领域中获得了广泛应 用[14-16]。不过,对于类似MEES这样的噪声频谱范围较宽且存在较弱有用信号分量的实际系统,原始矩阵束算法往往会误判系统阶数[17]。为此,国内外研究者相继提出了结合归一化奇异值、谱范数、奇异值信息熵等改进矩阵束算法[18],这些算法可去除部分噪声,不过它们都需要通过阈值来确定模型阶次,容易造成信号遗漏或冗余。故而,本文采用融合奇异值差分算法去改进原始矩阵束算法,在有效选取原始信号最大模态数、确定模型阶次的同时,降低已有定阶算法对阈值的依赖水平。
针对多源谐波的抑制问题,目前大都根据谐波的不同来源采用分而治之的控制方法。从机械侧看,对机械振动的抑制主要分为主动控制和被动控制。主动控制是指设计控制器从源头上消除振动,避免谐振频率位于系统带宽内[19],如极点配置[20]、加速度反馈或转矩反馈控制[21]等;被动控制一般在速度环插入陷波滤波器对谐振分量进行消除,但是超出一定范围的频率偏移会使陷波滤波器失去工作能力[22]。从电气侧看,抑制电气谐波一般通过优化电机结构[23]和设计谐波抑制算法[24-26]等实现。其中,大部分电气谐波抑制算法的核心是通过削弱PMSM电磁转矩脉动进而达到抑制电气谐波的目的。比如,文献[27]引入谐振控制器以达到转矩脉动最小化,只是所采用的滞环控制需要以较高的开关频率才能达到较好的控制精度;文献[28]将神经网络用于电磁转矩脉动抑制,不过需要经过复杂的训练过程。反推控制可在确保闭环系统稳定的条件下达到准确、快速的跟踪效果,已有研究证实[29],相较于传统PI控制,反推控制在控制精度、控制速度等性能指标表现更优。为此,本文针对MEES系统的非线性特征和多源谐波统一抑制难题,将在定子电流矢量定向下基于反推控制原理设计含噪多源谐波统一抑制算法,实现机械侧谐波和电气谐波的同时抑制,改善了系统运行性能。
综上所述,为解决MEES系统多源谐波整体表征及统一抑制问题,本文将提出PMSM多源谐波提取及统一抑制方法。通过电机转速对融合机械侧和电气侧的多源谐波进行整体描述,对于含有高、低频原始信号的低信噪比系统,利用融合奇异值差分的矩阵束算法同时提取电机转速谐波中的高频和低频成分,并设计定子电流矢量定向下基于反推控制的多源谐波统一抑制算法,实现对系统多源谐波的提取和同时抑制。仿真和实验结果表明,融合奇异值差分的矩阵束算法能够快速、准确地识别转速信号中的多源谐波成分,多源谐波抑制方法能够有效抑制电机电磁转矩脉动进而平滑电机转速。
本文创新点主要体现于三个方面:一是在多源谐波整体表征方面,以PMSM电机转速和电磁转矩为桥梁,根据实测转速谐波,通过电机转子运动方程推导了多源谐波与电机转速谐波的关系表达式,实现了机械侧谐波和电气侧谐波的整体表征;二是在多源谐波提取方面,针对MEES系统同时包含高、低频信号分量的低信噪比特点,提出了融合奇异值差分的矩阵束算法,完成对高、低频谐波的同时准确提取;三是在多源谐波抑制方面,根据PMSM电磁转矩磁共能模型,在建立定子电流矢量定向下PMSM空间矢量模型的基础上,基于反推控制设计了多源谐波统一抑制控制算法,实现了机械侧谐波和电气侧谐波的同时抑制,保证了系统平稳高效 运行。
MEES系统结构如图1所示,该系统可划分为涡簧、PMSM、交-直-交变频器和控制器四个部分。
图1 MEES系统结构
Fig.1 Structure diagram of MEES system
MEES系统中,位于储能箱中的涡簧片一端与转轴相连,另一端固定于储能箱箱体内壁上。不考虑固定转轴对于涡簧片的反作用力矩,施加于涡簧截面上的外力矩将处处相等。以涡簧上任意一小段微元簧片dL为分析对象,如图2所示,涡簧在外力扭矩TL的作用下,曲率半径由原先的 变为
变为 ,相应地,dL相对曲率中心的转角也由最初的
,相应地,dL相对曲率中心的转角也由最初的 变为
变为 。
。
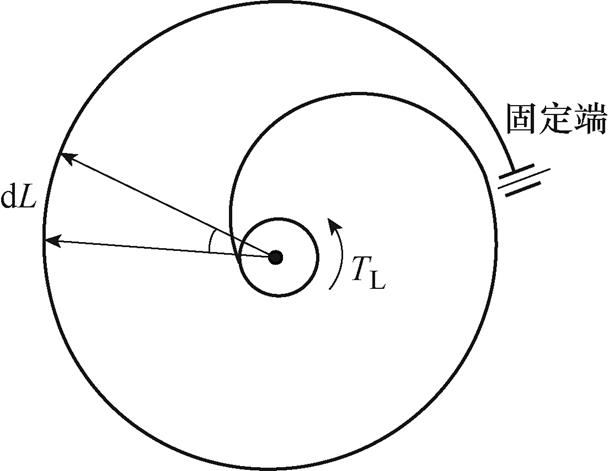
图2 外扭矩作用于涡簧示意图
Fig.2 Schematic diagram of torsion spring tightened by external torque
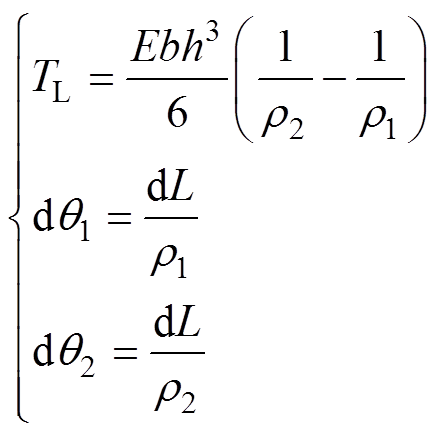
根据材料力学理论[30],可将涡簧扭矩写为
 (1)
(1)
式中,E、b和h分别为涡簧材料的弹性模量、宽度和厚度。在外力转矩TL作用下,涡簧转过的角度 可表示为
可表示为
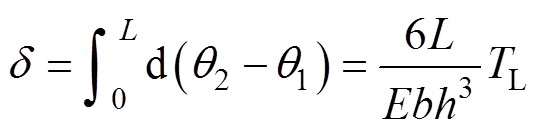 (2)
(2)
式中,L为涡簧的长度。
通过式(1)和式(2),外扭矩TL最终可表示为
 (3)
(3)
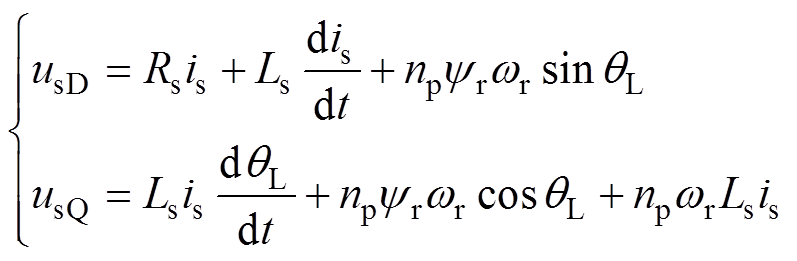
为了实现控制的迅速响应,在原始转子旋转坐标系dq0的基础上,引入一个新的基于定子电流矢量定向的同步旋转坐标系DQ0,定子电流矢量定向坐标系下PMSM空间矢量模型如图3所示,图中,D为实轴,Q为虚轴,并且,将定子电流矢量is定向于D轴,同时用qL表示D轴与d轴间的夹角,us为定子电压矢量。
首先以电机惯例,列写出dq0坐标系下PMSM电压方程为

图3 定子电流矢量定向坐标系下PMSM空间矢量模型
Fig.3 PMSM space vector model in stator current vector directional coordinate system
 (4)
(4)
式中, 、
、 和
和 、
、 分别为定子电压和电流的d、q轴分量;Rs为定子电阻;
分别为定子电压和电流的d、q轴分量;Rs为定子电阻; 、
、 分别为d、q轴定子电感;
分别为d、q轴定子电感; 为永磁体磁通幅值;
为永磁体磁通幅值; 为转子机械角速度;
为转子机械角速度; 为电机的极对数;t为时间。本研究采用了表贴式PMSM,故有:
为电机的极对数;t为时间。本研究采用了表贴式PMSM,故有:![]() 。
。
求解该坐标系下PMSM电压方程,推导过程如下:
DQ0坐标系与dq0坐标系之间的角度相差qL,则它们之间的变换关系可表示为
 (5)
(5)
式中,f为系统中的状态变量; 、
、 分别为DQ0坐标系和dq0坐标系下系统的状态变量。
分别为DQ0坐标系和dq0坐标系下系统的状态变量。
对式(5)求导可得
 (6)
(6)
将式(5)和式(6)一起代入dq0坐标系下的PMSM电压方程式(4),可得
 (7)
(7)
式中,Ls为定子电感。展开并整理式(7)即可构建DQ0坐标系下以电流矢量is与永磁体磁链矢量 夹角qL及其幅值is为状态变量的PMSM数学模型,有
夹角qL及其幅值is为状态变量的PMSM数学模型,有
 (8)
(8)
式中, 、
、 分别为定子电压矢量us的D、Q轴分量。
分别为定子电压矢量us的D、Q轴分量。
从式(8)中可以看到,定子电流矢量幅值is与角度qL可分别通过控制usD与usQ来实现。
PMSM电磁转矩磁共能模型可表达为
 (9)
(9)
其中
Kp=
式中,Tcog为齿槽转矩; 和
和 分别为dq0坐标系下d、q轴磁链。
分别为dq0坐标系下d、q轴磁链。
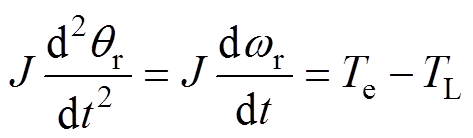
结合式(9),忽略粘滞阻尼系数,可得到PMSM的转子运动方程为
 (10)
(10)
式中, 为转子转过的角度;J为转动惯量。
为转子转过的角度;J为转动惯量。
假设机械侧涡簧柔性振动使得涡簧扭矩TL中产生频率为fb 的低频谐波[1],同时电气侧由于变频器非线性、定子非正弦分布及气隙磁场畸变等因素产生频率为fa 的高频谐波,根据转子运动方程式(10),并结合图3可知,电机转速中会同时耦合出频率fa 和fb 的谐波。需提到的是,fa 和fb 只是为了分析方便而假设的两个谐波频率成分,实际中,可能会存在多个谐波频率成分的情况。MEES系统多源谐波产生机理如图4所示。
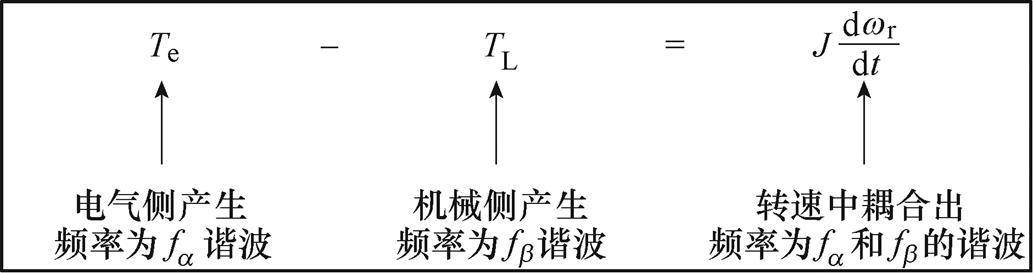
图4 MEES系统多源谐波产生机理
Fig.4 Generation mechanism of multi-source harmonic in MEES system
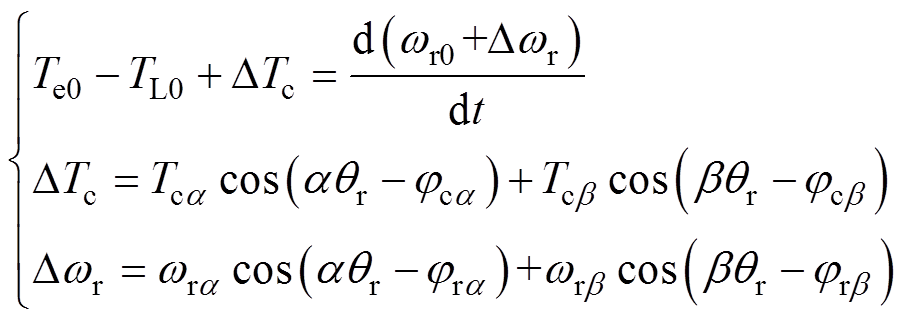
假设涡簧扭矩、电磁转矩和转速的有效分量分别为TL0、Te0和wr0,将式(10)改写为有效分量和谐波分量的组合形式,有
 (11)
(11)
式中,DTc和Dwr分别为多源谐波引发的转矩谐波和转速谐波;Tca 和jca 分别为第a 次谐波转矩的幅值和相位;Tcb 和jcb 分别为第b 次谐波转矩的幅值和相位;wra 和jra 分别为第a 次转速谐波的幅值和相位;wrb 和jrb 分别为第b 次转速谐波的幅值和相位。
根据式(11),经过适当推导,可得
 (12)
(12)
式(12)说明,多源谐波成分确实能够以转速谐波来整体表征,并且第a 次和第b 次转速谐波的幅值wra 和wrb 分别正比于多源谐波引发的第a 次和第b 次转矩谐波幅值Tca 和Tcb,而与平均转速wr0成反比。可见,不需要对多源谐波的具体来源进行区分和探究,也不需要经历复杂的建模过程,通过测量获取的转速谐波即可整体描述多源谐波。
2.2.1 含噪转速谐波信号数学建模
研究表明[4],MEES系统的机械侧振动谐波是低于1 Hz的低频谐波,而电气侧谐波频率一般是基波频率的整数倍次,故相对于机械侧谐波属于高频谐波。假设转速谐波信号由来自机械侧和电气侧的m个谐波分量构成,考虑实际系统中存在噪声干扰,则含噪转速谐波信号y数学模型可表示为
 (13)
(13)
式中,x为转速谐波信号;xs为噪声信号。将式(13)离散化,可得
 (14)
(14)
式中,k为采样点个数(k=1, 2, 3,…, N);Ai为第i次谐波幅值;fi为第i次谐波频率; 为第i次谐波初相位;tc为采样步长。
为第i次谐波初相位;tc为采样步长。
2.2.2 融合奇异值差分的矩阵束算法
通过融合奇异值差分的矩阵束算法从含噪信号中提取有用信号的步骤如下:
(1)将采样序列y(k)(k=1, 2, 3,…, N)作为采样信号,构造Hankel矩阵。
 (15)
(15)
式中,l为矩阵束参数,为了保证算法较好的抗干扰性能,根据文献[14]选取l=N/2。
(2)对矩阵进行奇异值分解。
 (16)
(16)
式中,S和D分别为(N-l)×(N-l)阶和(l-1)×(l-1)阶的正交矩阵;V为(N-l)×(l-1)的对角阵,其主对角元素 即对应为Y的第i个奇异值。
即对应为Y的第i个奇异值。
(3)利用奇异值差分确定原始信号对应最大模态数M。
传统的矩阵束算法对于不含噪声干扰或高信噪比含噪系统,通常采用设定阈值法来确定原始信号最大模态数,即 ,其中,
,其中, 为最大奇异值,
为最大奇异值, 为阈值。但对于低信噪比系统,且当原始信号中含有低频信号分量时,此时噪声信号与原始低频信号对应的奇异值差别不大,利用上述方法将无法准确选取合适阈值,使得传统矩阵束算法在确定系统最大模态数时产生较大误差。本研究通过分析多源谐波信号与奇异值矩阵的内在关系发现:奇异值矩阵中的对角元素按照从大到小排列,且系统任一信号分量对应的奇异值大小与自身信号能量相关,能量越高对应的奇异值越大,在奇异值矩阵中的位置也越靠前。进一步利用欧拉公式[31],可将任一信号分量分解为两个极点共轭的对偶复指数函数之和,而该对偶复指数信号幅值相同,频率互为相反数,能量几乎相同,因此任一信号分量反映在奇异值矩阵上,对应的是两个大小相近、位置相邻的奇异值。因此,可对任一含噪信号分量对应的两个相邻位置的奇异值进行差分运算,并作标准化处理,有
为阈值。但对于低信噪比系统,且当原始信号中含有低频信号分量时,此时噪声信号与原始低频信号对应的奇异值差别不大,利用上述方法将无法准确选取合适阈值,使得传统矩阵束算法在确定系统最大模态数时产生较大误差。本研究通过分析多源谐波信号与奇异值矩阵的内在关系发现:奇异值矩阵中的对角元素按照从大到小排列,且系统任一信号分量对应的奇异值大小与自身信号能量相关,能量越高对应的奇异值越大,在奇异值矩阵中的位置也越靠前。进一步利用欧拉公式[31],可将任一信号分量分解为两个极点共轭的对偶复指数函数之和,而该对偶复指数信号幅值相同,频率互为相反数,能量几乎相同,因此任一信号分量反映在奇异值矩阵上,对应的是两个大小相近、位置相邻的奇异值。因此,可对任一含噪信号分量对应的两个相邻位置的奇异值进行差分运算,并作标准化处理,有
 (17)
(17)
 (18)
(18)
式中, 为第j个信号分量对应奇异值差值;
为第j个信号分量对应奇异值差值; 为信号分量对应奇异值差分标准化序列。
为信号分量对应奇异值差分标准化序列。
由序列可得到奇异值差分曲线。由于噪声信号对应的能量较小,与原始信号相比,相邻位置的奇异值差值更小,几乎趋近于零。故通过观察奇异值差分曲线,就可找到奇异值差分发生突变且数值趋近于零之前对应的信号个数,即能确定矩阵束算法选取的最大模态数M。
(4)构建矩阵Y1、Y2,计算转移矩阵G对应的特征值zg。
通过V的前M个奇异值构建新矩阵为
 (19)
(19)
式中, 为(N-l)×M的正交矩阵,前M行是由Y的前M个非零奇异值依序作为主对角元素组成的M×M方阵,后N-l-M行是一个(N-l-M)×M阶的零矩阵。
为(N-l)×M的正交矩阵,前M行是由Y的前M个非零奇异值依序作为主对角元素组成的M×M方阵,后N-l-M行是一个(N-l-M)×M阶的零矩阵。
对矩阵Y进行奇异值分解后,将其前M个主导右特征向量DT按顺序排列后,删去最后一行形成l×M矩阵并记为D1,删去第一行后形成l×M矩阵并记为D2。通过这两个矩阵,进一步运算后得到两个(N-l)×l的新矩阵为
 (20)
(20)
计算转移矩阵G为
 (21)
(21)
式中, 为Y1的伪逆矩阵。G存在M个特征值,记为zg(g=1, 2, 3,…, M)。
为Y1的伪逆矩阵。G存在M个特征值,记为zg(g=1, 2, 3,…, M)。
(5)利用最小二乘法求解各次谐波分量信息。
由式(22)求出各次谐波的频率为
 (22)
(22)
最后,由最小二乘法求得各次谐波的幅值和初相位,有
 (23)
(23)
 (24)
(24)
式中,Ri(i=1, 2, 3,…, M)为第i个对偶复指数信号分量对应的复幅值。
从电机运行视角看,优化电磁转矩可有效改善转速波动,而多源谐波可由转速谐波整体表征,由此可将多源谐波的抑制统一为优化电磁转矩来完成,优化电磁转矩则需要在电机定子绕组中注入相应的谐波电流。为简化说明,下面以抑制转速中的第k次谐波为例说明如何构建多源谐波下PMSM电磁转矩脉动的统一模型。式(12)中转矩谐波表达式中可能包含了电流谐波、磁链谐波和齿槽转矩等产生的谐波,经第2节中的谐波提取算法,通过提取的转速谐波信息即可表达转矩谐波的各项参数。
基于式(9)中PMSM电磁转矩磁共能模型可得注入电流引起的电磁转矩谐波 [28]为
[28]为
 (25)
(25)
式中,isk为k次定子谐波电流幅值; 为k次定子谐波电流角度。
为k次定子谐波电流角度。
为消除转矩谐波,令注入电流产生的电磁转矩谐波与提取到的转矩谐波相等,即
 (26)
(26)
展开可得
 (27)
(27)
即
 (28)
(28)
可以求得k次定子谐波电流的幅值参考值为
 (29)
(29)
k次定子谐波电流的角度参考值为
 (30)
(30)
定义k次定子谐波电流幅值误差为
 (31)
(31)
根据反推控制原理,对其求导,并结合式(8)可得
 (32)
(32)
令 ,kisk为大于零的控制增益,则k次谐波电流的幅值控制器为
,kisk为大于零的控制增益,则k次谐波电流的幅值控制器为
 (33)
(33)
同理,定义k次定子谐波电流角度误差为
 (34)
(34)
同样对其求导,并结合式(8)可得
 (35)
(35)
令 ,
, 为大于零的控制增益,则k次谐波电流的角度控制器为
为大于零的控制增益,则k次谐波电流的角度控制器为
 (36)
(36)
除了本研究设计的多源谐波抑制控制器外,为保证MEES系统平稳运行,还需要设计性能良好的PMSM控制算法。为避免开环I/f控制转速稳定性弱、电流动态性能不佳的缺点,本研究采用了文献[32]提出改进闭环I/f控制算法,具体控制方程为
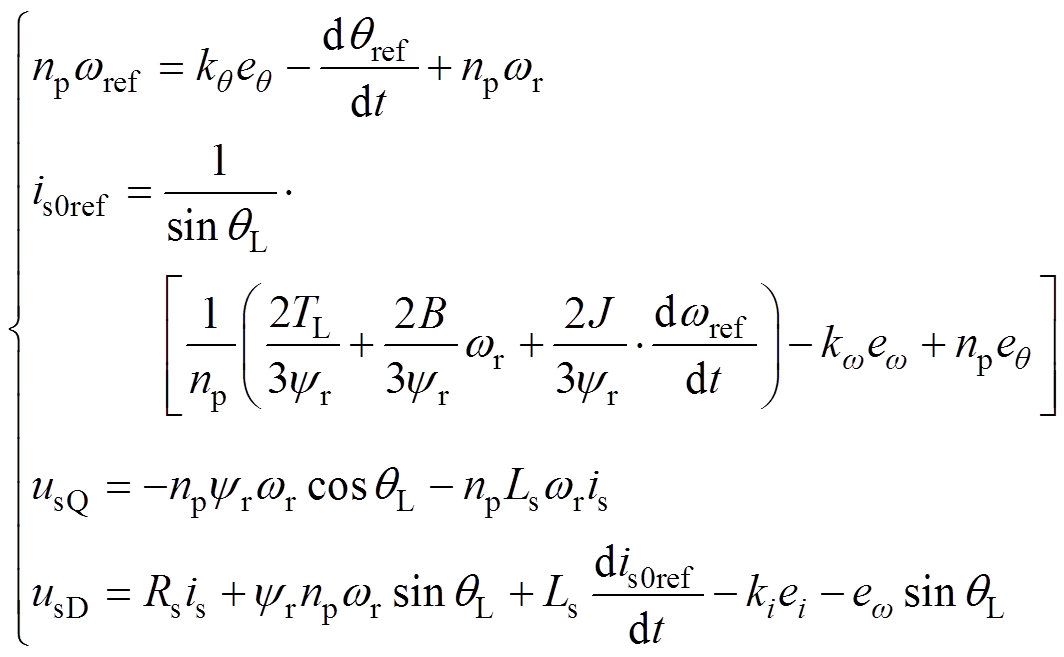 (37)
(37)
式中,B为粘滞系数; 、
、 和
和 分别为电机速度、定子电流有效分量幅值和D轴与d轴之间夹角
分别为电机速度、定子电流有效分量幅值和D轴与d轴之间夹角 的参考值;
的参考值; 、
、 和
和 分别为电机速度误差、电流误差和转角误差,
分别为电机速度误差、电流误差和转角误差, ,
, ,
, ;
; 、
、 和
和 为大于零的控制参数。
为大于零的控制参数。
为验证多源谐波提取及统一抑制方法的有效性,在Matlab平台中进行仿真验证。电网、交-直-交变频器、涡簧和PMSM的各项参数分别见表1~表4。
表1 电网参数
Tab.1 Parameters of power grid

参 数数 值 电网电压/V380 直流侧电容/mF0.032 电网频率/Hz50 直流电压/V400
表2 交-直-交变频器参数
Tab.2 Parameters of AC-DC-AC frequency converter

参 数数 值 输入电压/V380~440 输出电压/V0~输入电压 调速比/(r/min)120 速度控制精度(%)±0.02 输入频率/Hz47~63 输出频率/Hz0~400 输出功率/kW1.5 正弦交流输出电压畸变率(%)<2
表3 涡簧的各项参数
Tab.3 Parameters of vortex springs
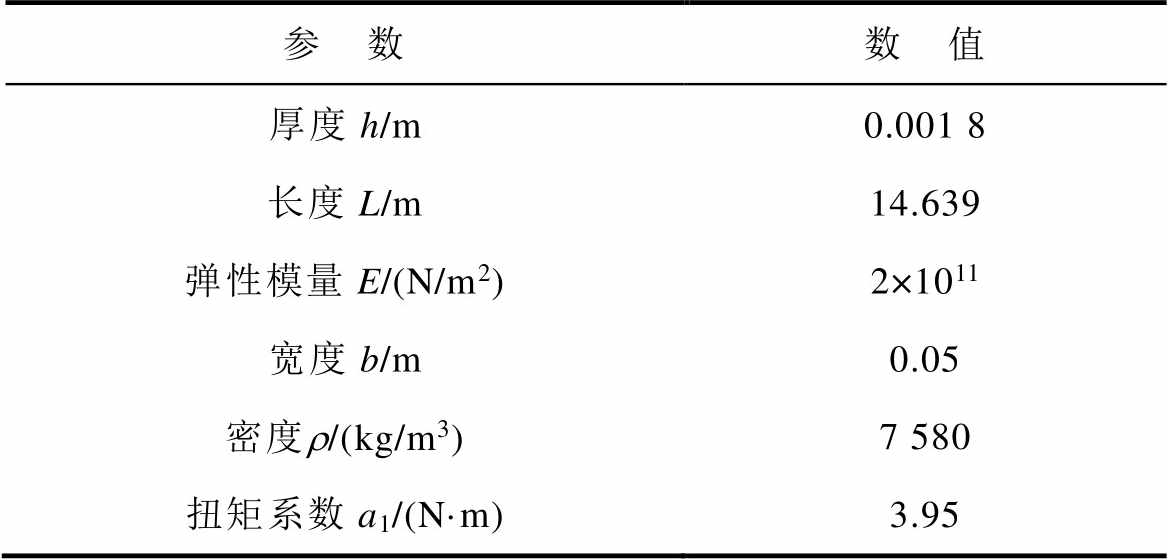
参 数数 值 厚度h/m0.001 8 长度L/m14.639 弹性模量E/(N/m2)2×1011 宽度b/m0.05 密度r/(kg/m3)7 580 扭矩系数a1/(N·m)3.95
表4 PMSM的各项参数
Tab.4 PMSM parameters

参 数数 值 定子电阻Rs/W2.9 极对数50 转动惯量J/(kg·m2)0.51 定子电感Ls/H0.03 永磁体磁链yr/Wb0.3 粘滞系数B/(N·s/m2)0.02
(1)仿真实验1:融合奇异值差分矩阵束算法提取含噪多源谐波信号的准确性验证。
对于电气侧谐波,在dq0坐标系下,PMSM的谐波成分为6的整数次倍,经实际测量,MEES系统中谐波以6次和12次为主,其中6次谐波含量占比最大,约为10.2%,12次谐波含量约为3%,为此,仿真研究中电气侧谐波考虑了6次谐波和12次谐波,它们都属于高频谐波。对于机械侧低频谐波,MEES系统一阶振动频率约为0.2 Hz左右,且一阶振动谐波为主次谐波。根据奈奎斯特准则,谐波采样频率需高于最高次信号频率的2倍,同时考虑到低频谐波分量,为提高算法的提取精度,应尽量将矩阵束参数l取得稍大一些。经过反复实验,在10 kHz采样频率下,本研究选取的采样点个数N为6 000,采样时间为600 ms,矩阵束参数l为3 000。进一步考虑到MEES实际运行时转速信号常有噪声干扰,为了更好地模拟实际情况,在多源谐波信号中添加了高斯白噪声,由此构建了包含高、低频谐波和噪声的含噪多源谐波信号,表达式为
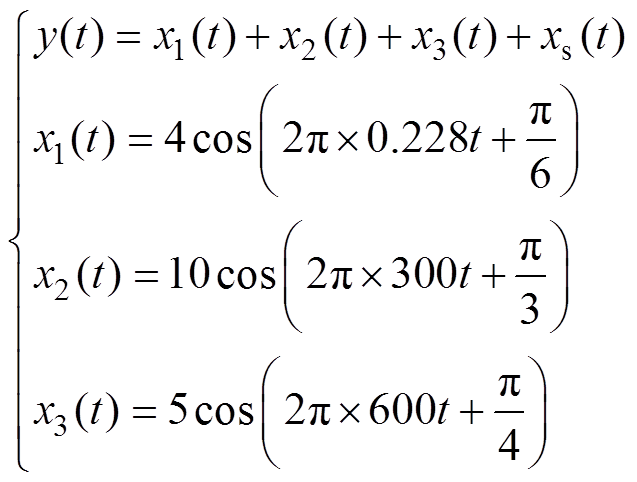 (38)
(38)
式中, 为描述机械侧振动谐波的低频谐波分量;
为描述机械侧振动谐波的低频谐波分量; 和
和 为描述电气侧谐波的高频谐波分量;
为描述电气侧谐波的高频谐波分量; 为高斯白噪声,信噪比SNR=20。
为高斯白噪声,信噪比SNR=20。
首先,利用奇异值差分确定信号最大模态数,含噪转速谐波对应的奇异值及其差分序列如图5所示。由图5a可见,原始转速谐波信号能量主要集中在前几个奇异值上,从第7个奇异值开始直至最后,它们的幅值都在120附近,则可认为它们是能量较低的噪声信号所对应的奇异值序列。由图5b可见,能量在第3个信号所对应的奇异值差值处发生突变,并从第4个信号开始,之后对应的奇异值差值趋近为0,因此,为了保证有用信号不丢失并同时滤除尽可能多的噪声,本研究选取能量差分曲线第3信号所对应的奇异值差值为能量突变点,并取前6个奇异值分量作为系统最大模态数。
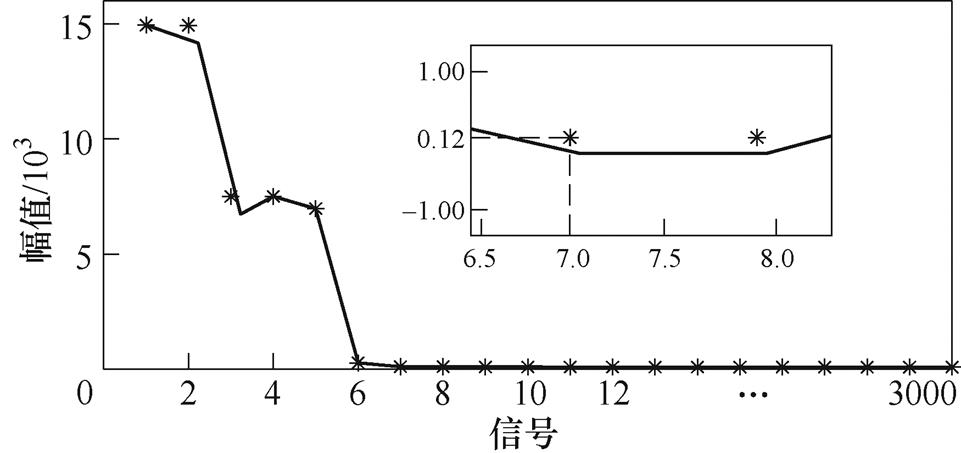
(a)奇异值序列
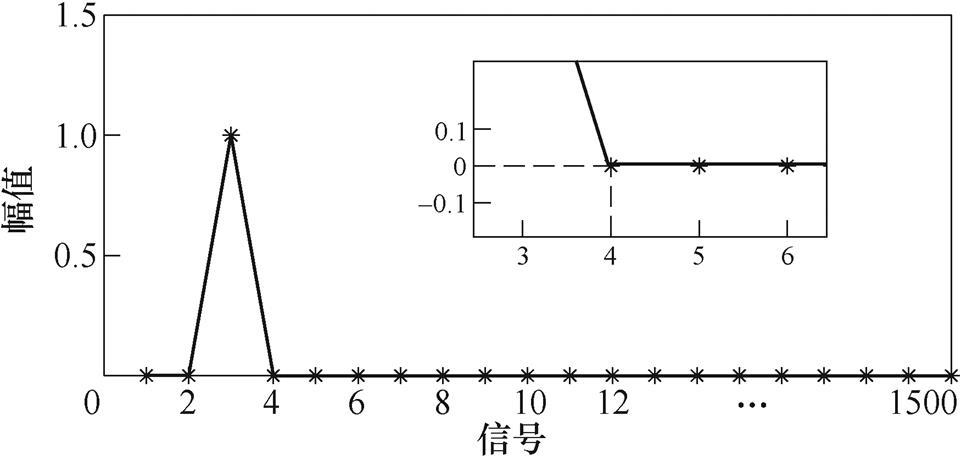
(b)奇异值差分序列
图5 含噪转速谐波对应的奇异值及其差分序列
Fig.5 Singular values corresponding to noise-containing speed harmonics and their differential sequences
最终,利用融合奇异值差分的矩阵束算法提取到的各次谐波成分结果见表5。可知,本研究采用的融合奇异值差分的矩阵束算法可同时分解出信号中的低频分量和高频分量,并提取出它们的频率、幅值和初相位,其中对于高频谐波信息提取误差约为1%,实现了高频谐波信息的准确识别,而对于低频谐波信息提取误差约5%,可见该算法具备较高的识别准确度,完全满足工程应用需要。
表5 多源谐波提取结果
Tab.5 Extraction results of multi-source harmonics

序号频率/Hz幅值/(rad/s)初相位/rad 理论值计算值误差(%)理论值计算值误差(%)理论值计算值误差(%) x10.228 00.239 85.175 44.000 03.995 40.115 00.523 10.499 54.511 5 x2300.000 0300.001 60.000 510.000 010.054 60.546 00.047 20.047 00.423 7 x3600.000 0599.994 60.000 95.000 05.051 41.028 00.785 40.794 01.094 9
(2)仿真实验2:多源谐波抑制策略的有效性验证。
上述实验结果表明,本研究提出的融合奇异值差分的矩阵束算法不仅能识别出含噪信号中的谐波个数,还能准确地提取各次谐波的频率、幅值和初相位信息。以此为基础,本组仿真实验对比分析了在加入多源谐波抑制算法前后PMSM电磁转矩、转速谐波含量以及转速波形的变化情况。控制器参数取值为:kq =10、kw =10、ki =100、ki6=100和ki12=60,同时设定速度参考值为60 r/min。
图6a和图6b分别绘制了多源谐波抑制算法投入前后的电磁转矩波形,可见,未加控制时,电磁转矩呈现明显脉动,而投入抑制算法后,电磁转矩波明显变得平滑,几乎未见波动。图7给出了投入多源谐波抑制算法前后转速波形对比情况,图8进一步给出了多源谐波对于谐波的抑制效果。由图8可见,多源谐波抑制算法大幅度抑制了低次谐波和高次谐波,其中低次谐波含量从4%降到0.35%,6次谐波含量从10.2%降到1%左右。
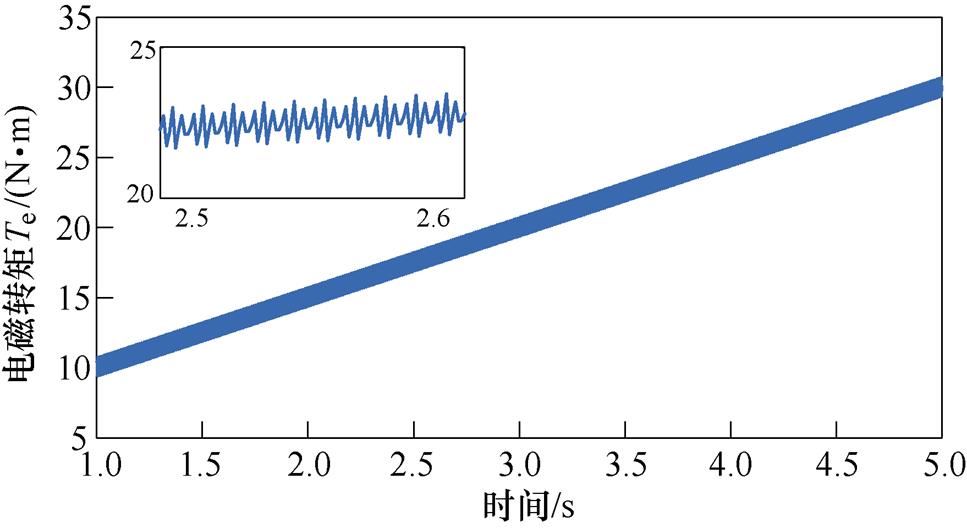
(a)未投入抑制算法
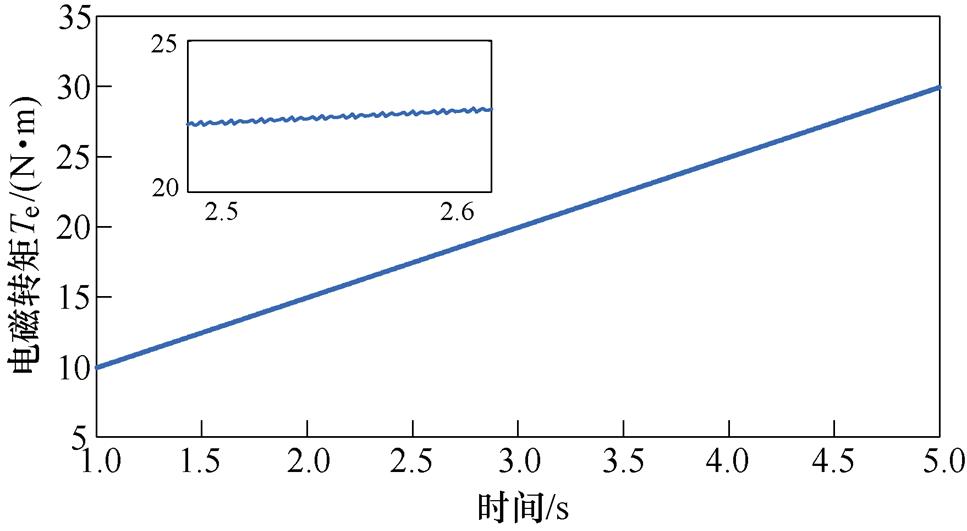
(b)投入抑制算法
图6 投入与未投入多源谐波抑制算法电磁转矩波形对比
Fig.6 Comparison of electromagnetic torque waveforms with and without multi-source harmonics suppression algorithm
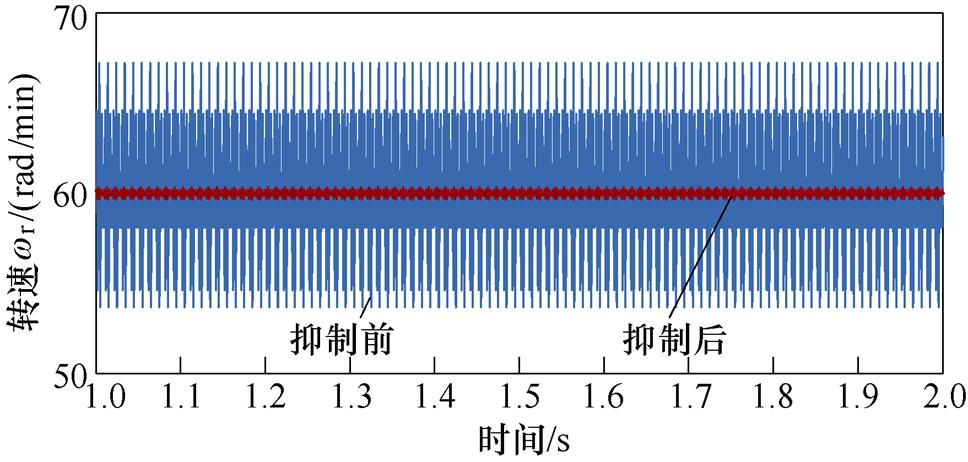
图7 加入与未投入多源谐波算法的转速波形对比
Fig.7 Comparison of speed ripple waveforms with and without multi-source harmonics suppression algorithm
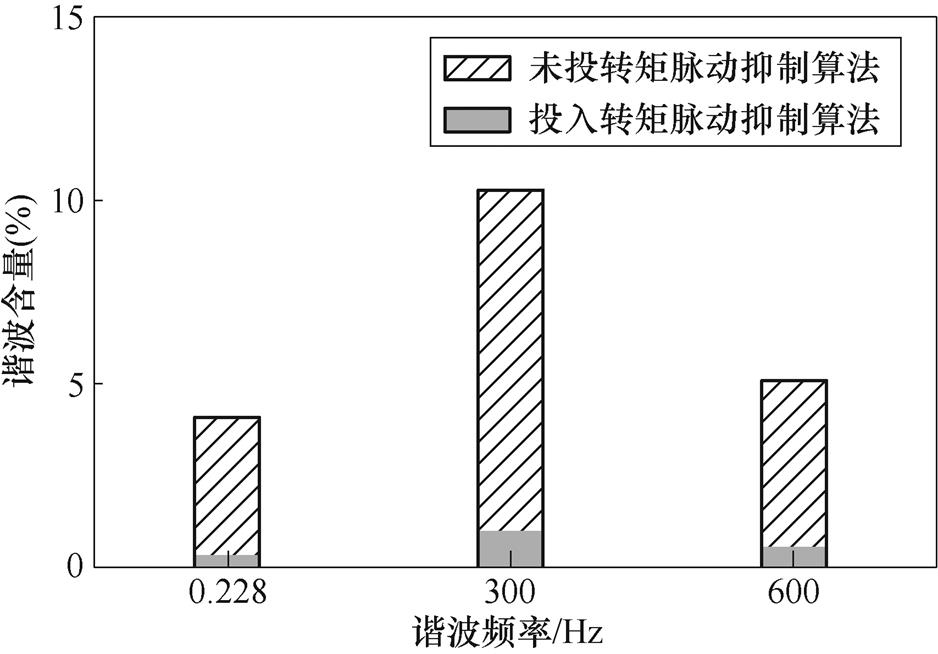
图8 投入与未投入多源谐波抑制算法转速谐波含量对比
Fig.8 Comparison of speed harmonics content with and without multi-source harmonics suppression algorithm
综上所述,加入转矩脉动抑制算法后转速波形振动幅度明显变小,波形也更为平滑。仿真实验结果表明,提出的多源谐波统一抑制算法确实能够有效地抑制多源谐波导致的电磁转矩脉动,使系统保持良好的运行性能。
为了进一步验证本研究提出的多源谐波提取和抑制算法,设计了如图9、图10所示的PMSM驱动涡簧负载的硬件实验及控制平台,平台采用TMS320F28335作为控制芯片,系统参数与仿真部分保持一致。
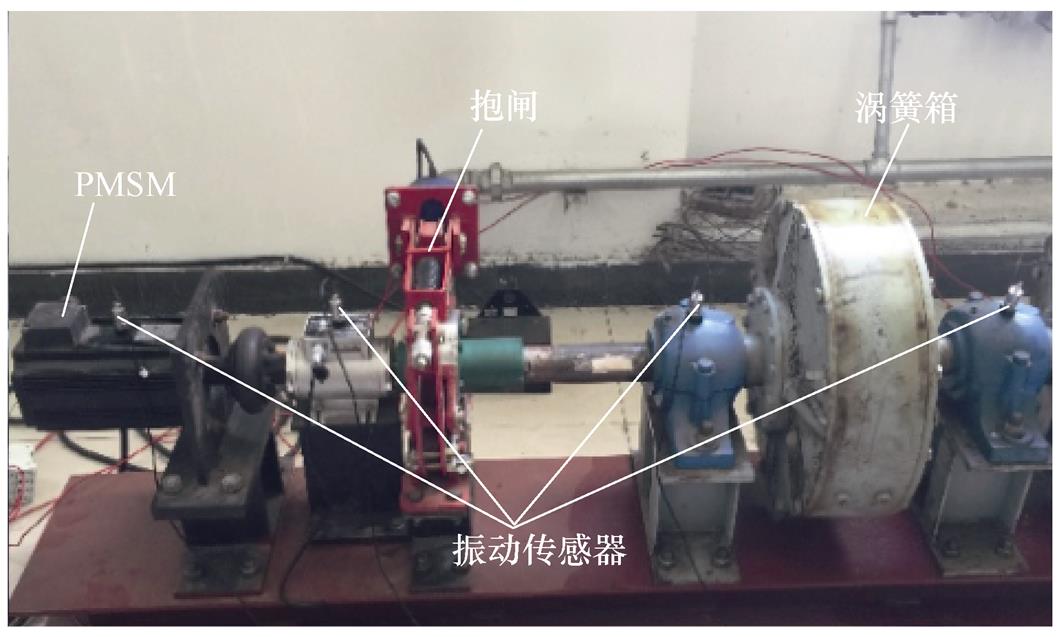
图9 MEES系统多源谐波提取与抑制硬件实验平台
Fig.9 Hardware experimental device of multi-source harmonics extraction and suppression for MEES system
实验过程如下:为对比投入多源谐波提取及抑制算法前后样机测试系统实际控制效果,实验过程如下:PMSM由静止状态起动至第1 s达到初始转速60 r/min,在第6~11 s系统未投入多源谐波提取及抑制控制器,其余时间均投入多源谐波提取及抑制控制器,该过程使用的控制参数为:kq =10、kw =10、ki=100、ki6=100和ki12=60;运行至第20 s时转速突变至100 r/min,此后保持该转速运行至第30 s,此过程控制器参数调整为:kq =60、kw =72、ki=98、ki6=120和ki12=161;之后转速又恢复至初始转速60 r/min,控制参数也做相应调整。D轴与d轴间的夹角 、基波电流矢量幅值is0、转子转速wr、转矩脉动DT结果分别如图11~图14所示。
、基波电流矢量幅值is0、转子转速wr、转矩脉动DT结果分别如图11~图14所示。
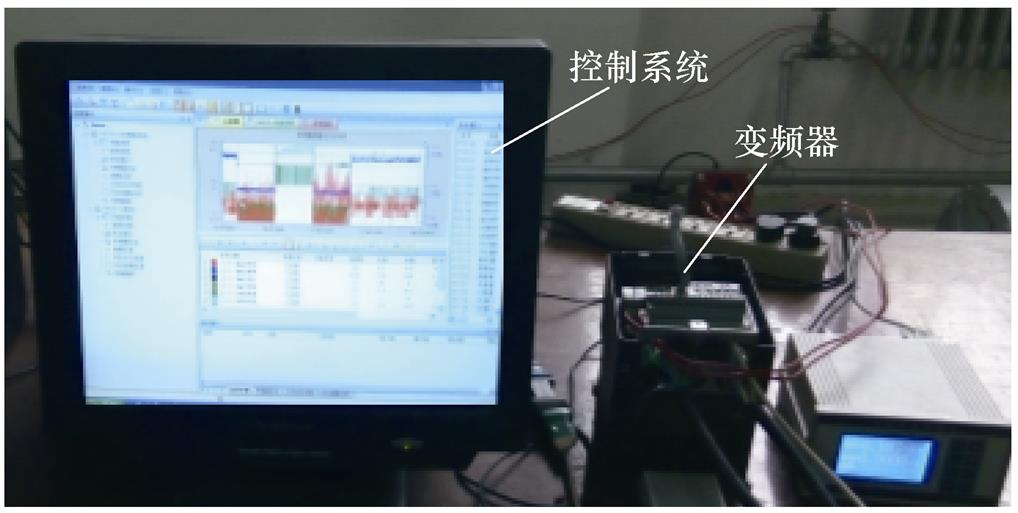
图10 MEES控制系统及变频器
Fig.10 Control system and inverters of MEES
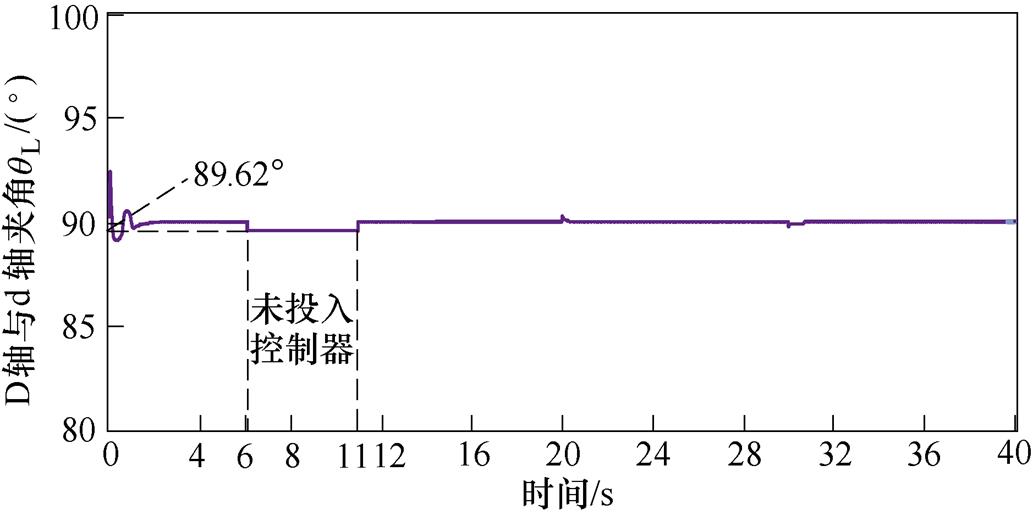
图11 投入控制器前后及转速变化下的qL运行波形
Fig.11 Operational waveform of qLwith variable speed and whether to include controller
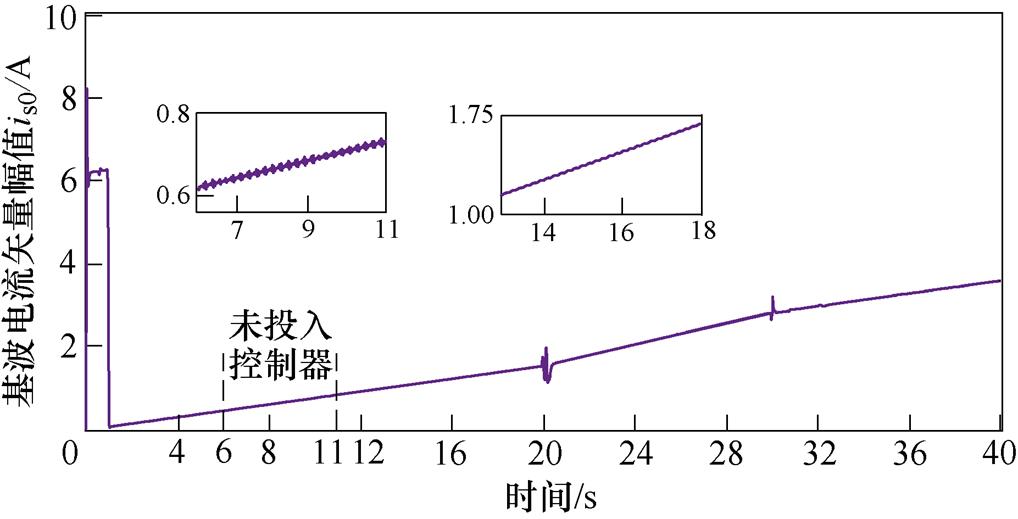
图12 投入控制器前后及转速变化下的is0运行波形
Fig.12 Operational waveform of is0with variable speed and whether to include controller
由图11、图12可知,在第6~11 s样机未投入多源谐波提取及抑制控制器期间,由于系统存在耦合的多源谐波,使得PMSM运行稳定时,收敛至89.62°附近,存在一定的静态误差,而且此时定子电流幅值也出现了一定程度的波动。当重新投入谐波提取及抑制控制器后,快速收敛并稳定于 90°,定子电流幅值与未投入控制器之前相比,几乎不出现波动。图13和图14进一步表明,在第6~11 s时间段内,目标转速设定为60 r/min,由于系统未投入多源谐波提取及抑制控制器,此时转速波动和转矩脉动峰峰值分别达到0.4 r/min和4 N·m,说明此时系统内部存在抖振,转速波形经放大处理后,可以明显看到转速谐波的存在。在第13~18 s时间段内,由于投入了控制器,电机转速稳定运行于60 r/min附近,转速波形波动幅度极小,且转矩脉动的峰峰值未超过0.1 N·m。此外,通过分析系统在第20 s和第30 s转速突变时各参数运行波形不难发现,本文提出的多源谐波提取及抑制算法不仅较好地抑制了涡簧振动及电机的转矩脉动,保持了电机稳定运行,而且所设计的控制器能够快速响应电机转速突变,具有良好的动态性能,各项运行参数波动小、收敛迅速。
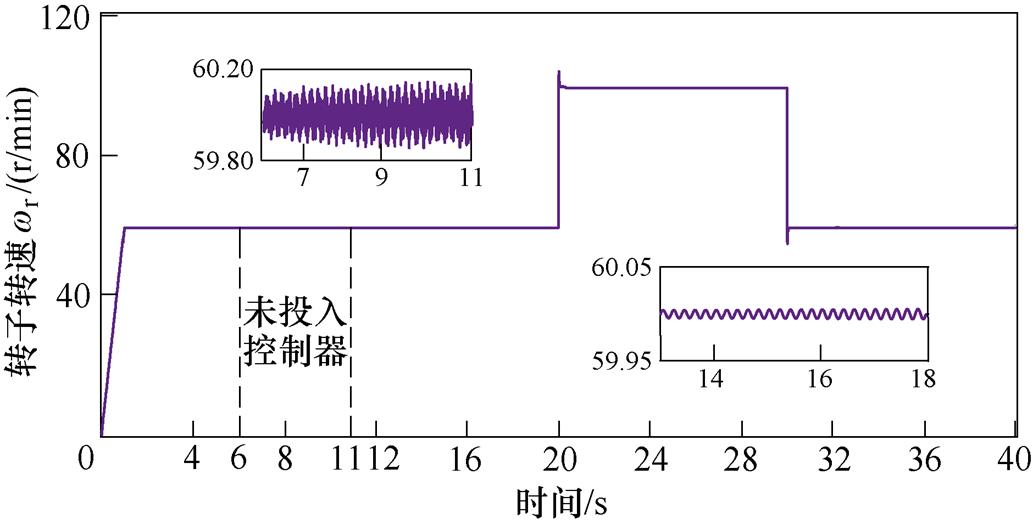
图13 投入控制器前后及转速变化下的wr运行波形
Fig.13 Operational waveform of wrwith variable speedand whether to include controller
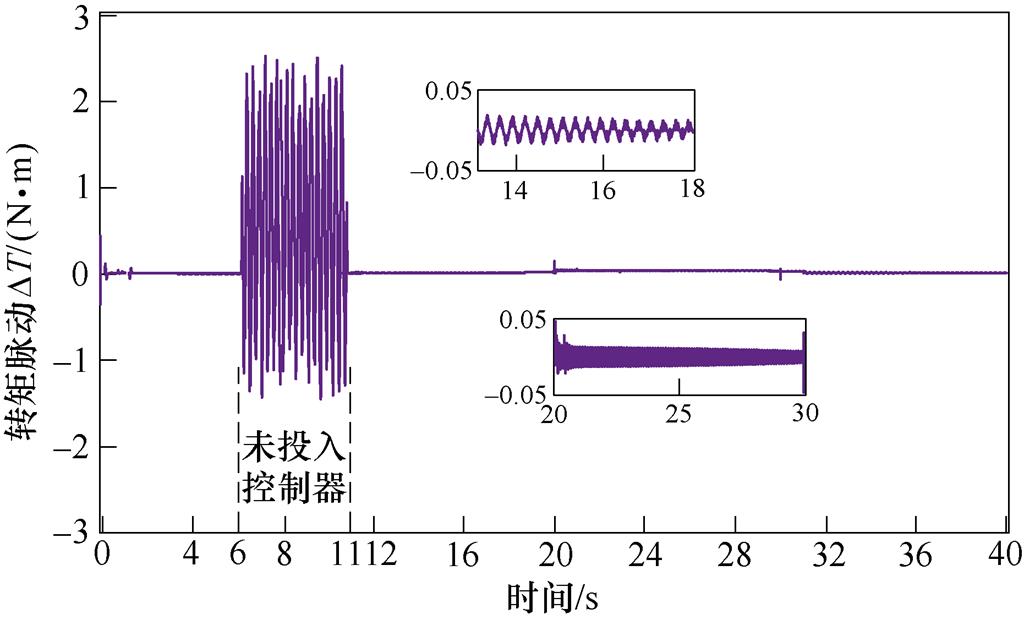
图14 投入控制器前后及转速变化下的DT运行波形
Fig.14 Operational waveform of DTwith variable speed and whether to include controller
通过研究得到以下结论:
1)以转速作为桥梁实现了对于机械侧谐波和电气侧谐波的整体表征,避免了对多源谐波耦合作用的分析和复杂的多源谐波建模过程。
2)融合奇异值差分的矩阵束算法,不仅能够快速地识别含噪转速谐波信号中的高、低频谐波成分,并且还能较准确提取它们的幅值、初相位信息,这表明本研究提出的融合奇异值差分的矩阵束算法具有较强的抗噪能力和较好的混合信号提取能力。
3)基于反推控制的PMSM多源谐波抑制算法能有效地消除多源谐波引起的电磁转矩脉动,大幅抑制了高、低频谐波信号,其中6次谐波含量由10.2%下降至1%左右,同时削弱了转速波动幅度,明显改善了MEES系统的运行性能。
参考文献
[1] Yu Yang, Cong Leyao, Tian Xia, et al. A stator current vector orientation based multi-objective inte- grative suppressions of flexible load vibration and torque ripple for PMSM considering electrical loss[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(3): 161-171.
[2] Sun Tongze, Liu Xiping, Zou Yongling, et al. Design and optimization of a mechanical variable-leakage- flux interior permanent magnet machine with auxi- liary rotatable magnetic poles[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 21-29.
[3] 黄科元, 周佳新, 刘思美, 等. 考虑逆变器非线性永磁同步电机高频注入电感辨识方法[J]. 电工技术学报, 2021, 36(8): 1607-1616.
Huang Keyuan, Zhou Jiaxin, Liu Simei, et al. Inductance identification method of permanent magnet synchronous motor considering inverter nonlinearity based on high-frequency injection[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1607-1616.
[4] 余洋, 田夏, 从乐瑶, 等. 基于反推控制和模态估计的永磁同步电机驱动柔性涡簧储能控制方法[J]. 电工技术学报, 2019, 34(24): 5084-5094.
Yu Yang, Tian Xia, Cong Leyao, et al. Energy storage control method of flexible spiral springs driven by permanent magnet synchronous motor based on back- stepping control and modal estimation[J]. Transa- ctions of China Electrotechnical Society, 2019, 34(24): 5084-5094.
[5] Zhou Zhanqing, Xia Changliang, Yan Yan, et al. Torque ripple minimization of predictive torque control for PMSM with extended control set[J]. IEEE Transactions on Industrial Electronics, 2017, 64(9): 6930-6939.
[6] Feng Guodong, Lai Chunyan, Tian Jiangbo, et al. Multiple reference frame based torque ripple mini- mization for PMSM drive under both steady-state and transient conditions[J]. IEEE Transactions on Power Electronics, 2019, 34(7): 6685-6696.
[7] 于蓬, 王珮琪, 章桐, 等. 电动车动力传动系机电耦合扭转振动分析与控制[J]. 振动与冲击, 2017, 36(17): 10-15, 34.
Yu Peng, Wang Peiqi, Zhang Tong, et al. Electro- mechanical coupled torsion vibration analysis and control of electric vehicle drivelines[J]. Journal of Vibration and Shock, 2017, 36(17): 10-15, 34.
[8] Gong Lei, Zhu Changsheng. Synchronous vibration control for magnetically suspended rotor system using a variable angle compensation algorithm[J]. IEEE Transactions on Industrial Electronics, 2021, 68(8): 6547-6559.
[9] 张骞, 边晓燕, 徐鑫裕, 等. 基于SVD-Prony及主成分回归的次同步振荡阻尼特性影响因素研究[J]. 电工技术学报, 2022, 37(17): 4364-4376.
Zhang Qian, Bian Xiaoyan, Xu Xinyu, et al. Analysis of influencing factors on damping characteristics of subsynchronous oscillation based on singular value decomposition Prony and principal component regre- ssion[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4364-4376.
[10] 陈秦箫, 卢岩, 郭建超, 等. 基于奇异值分解和倒谱预白化随机共振的滚动轴承故障诊断[J]. 上海电机学院学报, 2022, 25(3): 153-159.
Chen Qinxiao, Lu Yan, Guo Jianchao, et al. Rolling bearing fault diagnosis based on singular value decomposition and cepstrum prewhiting-stochastic resonance[J]. Journal of Shanghai Dianji University, 2022, 25(3): 153-159.
[11] Sarkar T K, Park S, Koh J, et al. Application of the matrix pencil method for estimating the SEM (singularity expansion method) poles of source-free transient responses from multiple look directions[J]. IEEE Transactions on Antennas and Propagation, 2000, 48(4): 612-618.
[12] Yilmazer N, Sarkar T K. Efficient computation of the azimuth and elevation angles of the sources by using unitary matrix pencil method (2-D UMP)[C]//2006 IEEE Antennas and Propagation Society International Symposium, Albuquerque, NM, USA, 2006: 1145- 1148.
[13] 吴勃, 高俊山, 王姗姗. 矩阵束算法的改进及应用[J]. 哈尔滨理工大学学报, 2011, 16(3): 41-45.
Wu Bo, Gao Junshan, Wang Shanshan. Modifications and applications of matrix pencil algorithm[J]. Journal of Harbin University of Science and Tech- nology, 2011, 16(3): 41-45.
[14] 金涛, 刘对. 基于广义形态滤波与改进矩阵束的电力系统低频振荡模态辨识[J]. 电工技术学报, 2017, 32(6): 3-13.
Jin Tao, Liu Dui. Power system low frequency oscillation identification based on the generalized morphological method and improved matrix pencil algorithm[J]. Transactions of China Electrotechnical Society, 2017, 32(6): 3-13.
[15] 邢煦然, 赵宏钟, 贾鑫. 采用DBSCAN改进的矩阵束极点提取算法[J]. 雷达科学与技术, 2018, 16(3): 327-332.
Xing Xuran, Zhao Hongzhong, Jia Xin. A matrix pencil method algorithm improved by DBSCAN to poles extraction[J]. Radar Science and Technology, 2018, 16(3): 327-332.
[16] 袁姿豪. 谐振雷达目标极点特征提取与识别技术研究[D]. 西安: 西安电子科技大学, 2020.
[17] 陈星宇. 基于最小二乘矩阵束的励磁涌流识别方案[J]. 电力工程技术, 2019, 38(2): 44-49.
Chen Xingyu. Identification method for inrush current based on least-square matrix pencil algorithm[J]. Electric Power Engineering Technology, 2019, 38(2): 44-49.
[18] 丁仁杰, 沈钟婷. 基于EMO-EDSNN的电力系统低频振荡模态辨识[J]. 电力系统自动化, 2020, 44(3): 122-131.
Ding Renjie, Shen Zhongting. Power system low frequency oscillation mode identification based on exact mode order-exponentially damped sinusoids neural network[J]. Automation of Electric Power Systems, 2020, 44(3): 122-131.
[19] Lu Shaowu, Chang He, Zhang Shenghui, et al. Mechanical resonance suppression based on self- tuning Notch filter for servo system[C]//2021 40th Chinese Control Conference (CCC), Shanghai, China, 2021: 2887-2890.
[20] 丁有爽, 肖曦. 基于极点配置的永磁同步电机驱动柔性负载PI调节器参数确定方法[J]. 中国电机工程学报, 2017, 37(4): 1225-1239.
Ding Youshuang, Xiao Xi. Parameter tuning methods based on pole placement for PI controllers of flexible loads driven by PMSM[J]. Proceedings of the CSEE, 2017, 37(4): 1225-1239.
[21] Pilbauer D, Vyhlídal T, Olgac N. Delayed resonator with distributed delay in acceleration feedback- design and experimental verification[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(4): 2120- 2131.
[22] 丁有爽, 肖曦. 永磁同步电机直接驱动柔性负载控制方法[J]. 电工技术学报, 2017, 32(4): 123-132.
Ding Youshuang, Xiao Xi. Control strategies of flexible load driven directly by permanent magnet synchronous motor[J]. Transactions of China Elec- trotechnical Society, 2017, 32(4): 123-132.
[23] Zhou Min, Zhang Xinxing, Zhao Wenxiang, et al. Influence of magnet shape on the cogging torque of a surface-mounted permanent magnet motor[J]. Chinese Journal of Electrical Engineering, 2019, 5(4): 40-50.
[24] 谷鑫, 鲁金月, 王志强, 等. 基于无差拍电流预测控制的永磁同步电机谐波电流抑制策略[J]. 电工技术学报, 2022, 37(24): 6345-6356.
Gu Xin, Lu Jinyue, Wang Zhiqiang, et al. Harmonic current suppression strategy for permanent magnet synchronous motor based on deadbeat current prediction control[J]. Transactions of China Elec- trotechnical Society, 2022, 37(24): 6345-6356.
[25] 李思毅, 苏健勇, 杨贵杰. 基于自抗扰控制的永磁同步电机弱磁控制策略[J]. 电工技术学报, 2022, 37(23): 6135-6144.
Li Siyi, Su Jianyong, Yang Guijie. Flux weakening control strategy of permanent magnet synchronous motor based on active disturbance rejection control[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 6135-6144.
[26] 陈少先, 丁树业, 申淑锋, 等. 船舶用表贴式永磁同步电机的电磁振动分析与抑制[J]. 电工技术学报, 2023, 38(5): 1275-1286, 1298.
Chen Shaoxian, Ding Shuye, Shen Shufeng, et al. Analysis and suppression of electromagnetic vibration of surface mounted permanent magnet synchronous motor for ships[J]. Transactions of China Electro- technical Society, 2023, 38(5): 1275-1286, 1298.
[27] Ranjan S, Sreejeth M. Minimisation of ripples in torque of hysteresis current controlled PMSM using PI-RES controller[C]//2021 2nd International Confer- ence for Emerging Technology (INCET), Belagavi, India, 2021: 1-6.
[28] 王硕, 康劲松. 一种基于自适应线性神经网络算法的永磁同步电机电流谐波提取和抑制方法[J]. 电工技术学报, 2019, 34(4): 654-663.
Wang Shuo, Kang Jinsong. Harmonic extraction and suppression method of permanent magnet syn- chronous motor based on adaptive linear neural network[J]. Transactions of China Electrotechnical Society, 2019, 34(4): 654-663.
[29] 郑晓明, 米增强, 余洋, 等. 机械弹性储能箱结构及并网控制策略优化[J]. 电工技术学报, 2019, 34(22): 4708-4718.
Zheng Xiaoming, Mi Zengqiang, Yu Yang, et al. Optimization of energy storage box mechanical structure and grid-connected generation control strategy for mechanical elastic energy storage[J]. Transactions of China Electrotechnical Society, 2019, 34(22): 4708-4718.
[30] 余洋, 冯路婧, 米增强, 等. 基于增量反推控制的机械弹性储能用永磁同步电机控制方法[J]. 电机与控制学报, 2021, 25(12): 1-10.
Yu Yang, Feng Lujing, Mi Zengqiang, et al. Control method of permanent magnet synchronous motors for mechanical elastic energy storage based on incre- mental backstepping control[J]. Electric Machines and Control, 2021, 25(12): 1-10.
[31] 陈智勇, 罗安, 黄旭程, 等. 基于欧拉公式的宽频谐波谐振稳定性评估法[J]. 中国电机工程学报, 2020, 40(5): 1509-1523.
Chen Zhiyong, Luo An, Huang Xucheng, et al. Euler’s formula-based stability assessment for wideband harmonic resonances[J]. Proceedings of the CSEE, 2020, 40(5): 1509-1523.
[32] Yu Yang, Chang Da, Zheng Xiaoming, et al. A stator current oriented closed-loop I-f control of sensorless SPMSM with fully unknown parameters for reverse rotation prevention[J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8607-8622.
Abstract The vibration of flexible spring and power electronic equipment can cause multi-source harmonics in mechanical elastic energy storage (MEES) systems. Mechanical side harmonics are challenging to model accurately, and the multi-source harmonics cannot be characterized and suppressed uniformly in the MEES system. Therefore, a multi-source harmonics extraction and unified suppression method of permanent magnet synchronous motor (PMSM) is proposed for the MEES system. Firstly, the speed and electromagnetic torque of PMSM are used as a bridge, and the characterization of multi-source harmonics is modelled using the motor speed harmonics. The expression of multi-source and motor speed harmonics is derived from the motor rotor equation of motion, and the overall characterization of mechanical side and electrical side harmonics is realized. Then, in terms of multi-source harmonics information extraction, considering the existence of high and low-frequency harmonic signal components in the MEES system and the low signal-to-noise ratio, a matrix pencil algorithm combined with singular value difference is proposed. The matrix called Hankel is constructed using the measured rotor speed containing noise. Subsequently, the singular value difference algorithm is utilized to find the energy mutation point and determine the maximum number of modes of the multi-source harmonic signals. The multi-source harmonics information with different frequency components can be extracted accurately. Finally, based on the magnetic co-energy model of electromagnetic torque of PMSM and backstepping control, a unified suppression algorithm of multi-source harmonics under stator current vector orientation is designed to suppress the harmonics of different frequencies.
To verify the control performance of the multi-source harmonics suppression controller, simulations and prototype system experiments are conducted. Simulation results show that the maximum error of high-frequency harmonics information extracted is about 1%, and the maximum error of low-frequency harmonics information extracted is about 5% using the matrix pencil algorithm combined with singular value difference. The multi-source harmonics suppression algorithm reduces the low-frequency harmonics content from 4% to 0.35% and the 6th harmonic content from 10.2% to 1%. The proposed algorithm has high accuracy of information identification and can satisfy various needs of engineering applications.
The experimental results show that as the proposed controller is put into the MEES system,the angle between the D-axis and the d-axis is stabilized near 90 degrees, and the static error is tiny. In addition, the waveform of fundamental current vector amplitude is0 is smooth and has no fluctuations. The motor speed quickly converges to the reference with minimal fluctuations when the system runs steadily, and the peak-to-peak value of torque pulsation DT does not exceed 0.1 N·m. It indicates that the designed controller can quickly respond to sudden changes in motor speed and has good dynamic performance and stability. Also, the fluctuation of operating parameters is slight. The practical operational performance of the MEES system has been dramatically improved.
keywords:Mechanical elastic energy storage (MEES), permanent magnet synchronous motor (PMSM), matrix pencil algorithm, multi-source harmonics extraction and suppression, backstepping control
中图分类号:TM73
DOI: 10.19595/j.cnki.1000-6753.tces.222087
国家自然科学基金(52077078)和河北省自然科学基金(E2019502163)资助项目。
收稿日期 2022-11-04
改稿日期 2023-03-24
余 洋 男,1982年生,博士,教授,博士生导师,主要研究方向为电力储能技术、柔性负荷建模与调度。E-mail: ncepu_yy@163.com(通信作者)
余宗哲 男,1999年生,硕士研究生,主要研究方向为电力储能技术。E-mail: 1654514259@qq.com
(编辑 崔文静)