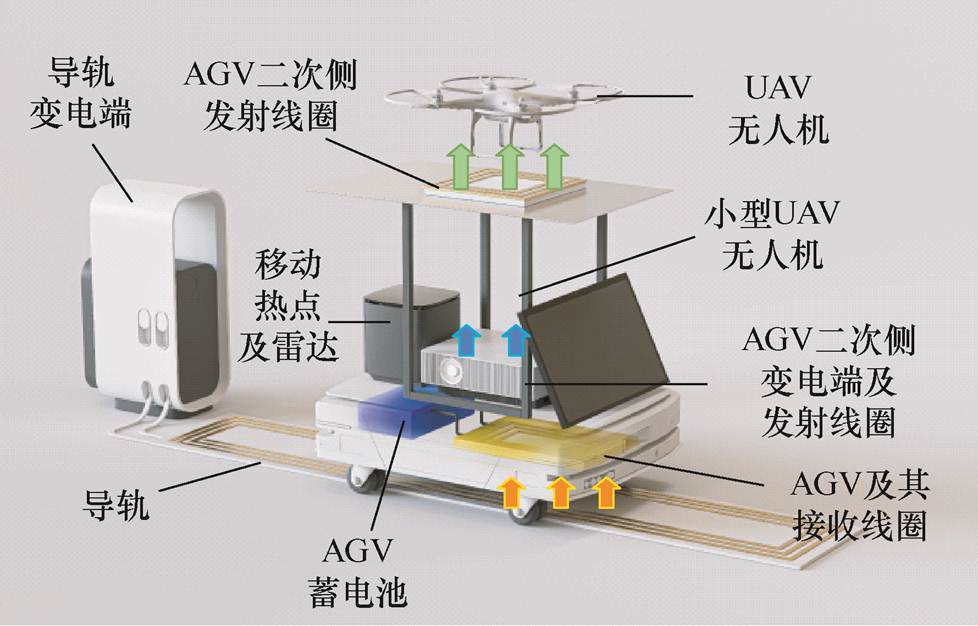
图1 系统架构示意图
Fig.1 System schematic
摘要 在工业车间和物流仓库等应用场景中,越来越多的智能机器人用来执行一些服务、监测及运输工作。该文结合各巡检机器人的智能特性并针对应用场景的充电服务需求,提出一种基于准双向三态协同调度的无人车(AGV)和无人机(UAV)逐级式无线充电设计方法,旨在拓展整个系统的充电域并提高传能的灵活性及便利性。相较于传统固定式静态充电设备和导轨式动态充电设备,该文引入中继带源系统和双向传能的开发设计理念,在移动AGV和UAV蓄电池的输入输出两端都设计安装了能量拾取模块和能量发射模块,实现导轨—AGV—UAV的三级逐级式供电模式,并结合AGV移动热点的组网功能,构建移动供电电源。根据供电需求,使得系统设备可以选择自身的供电角色或是取电角色,实现系统准双向的三种供能模态。同时,基于系统电气参数的稳定性和发射线圈在有限数量下的合理利用,设计系统综合的拓扑结构和功率调节控制器。最后,依据构建三态模型的数据分析完善应用开发,并通过实验验证该方法的有效性。
关键词:无线充电 协同调度 准双向多模态 逐级式AGV/UAV无线充电应用
随着愈加便捷的生活方式和更高效智能的应用需求,无线电能传输(Wireless Power Transfer, WPT)技术作为新能源相关的新兴技术已成为未来电力行业发展的一个重要趋势[1-3],尤其在以下这几个领域得到广泛的应用:①特殊环境的无线充电设备[4-6];②无线供电/无人巡航设备[7-9];③工业无线供电传感设 备[10-11];④无线充电汽车[12-14];⑤生物医疗[15-16]等。
近年来,移动机器人无人车(Automated Guided Vehicle, AGV)/无人机(Unmanned Aerial Vehicle, UAV)在工业巡检、办公物流、农林植保及军事侦察监视领域等扮演了重要角色,该设备结合控制、通信等领域的数据汇交和智能决策解决了许多繁琐的工程问题,在智能家居、智慧工厂及智慧园区的发展中得到了广泛的关注。然而,由于智能巡检机器人本身体积小、容量低、负重有限等缺陷,其续航能力是智能移动设备的瓶颈问题,而无线充电技术是最可靠、安全、自动化程度最高的解决方案。
当前,基于无线充电移动机器人设备的相关技术文献主要可归纳为以下三个方面:①新型宽容忍范围的耦合机构[17-18];②复杂系统参数整定及优化[19-20];③静/动态充电能效优化及频率跟踪[21-22]。这些方法在一定程度上拓展了有效充电区域并提高了系统的输出性能,但上述针对移动机器人采取的WPT技术方案主要以两线圈结构为工程应用的主流,由于充电位置一般固定,终端设备在空间配置的灵活性较低、约束较大,并没有真正合理地解放充电域的限制。从应用开发的角度来看,目前的无线充电移动设备仍存在以下几个问题:①设备反复利用率大;②人机充电管理复杂;③各设备之间充电模式独立封闭;④充电环境受限。
因此,无线充电移动设备如何在有限资源下进一步拓展移动设备的充电区域范围,如何从系统架构上提升移动充电设备的取电灵活性和互操作性,如何同时构建设备间充电的交互桥梁是当下研究的难点。无线电力传输网络(Wireless Power Transfer Network, WPTN)概念的提出能够对未来无线充电系统应用的发展起到重要规划[23-26]作用,上述文献以宏观的角度针对无线传输组网的研究在模型构建、参数设计、路径优化以及配电决策等方面做出了贡献,但最终的验证均基于简单的线圈测试平台,其并不能完整地复现实际的应用环境和相关特性。以无线传输组网为启发,结合其特点构建多级多传输通道的无线供电系统,打通无线能量交汇通道是本文设计的出发点。目前基于多移动设备逐级式无线充电系统技术的研究还较少。实际上无线传输网在基于谐振频率一致性开发原则的情况下,其架构特点主要归纳为以下两个原则:
(1)中继式或多发射多接收无线供电系统。在中继式或多发射多接收无线供电系统方面,文献[27]采用多米诺无线供电系统对杆塔监测设备供电的方式进行研究,利用互感耦合理论对其进行建模分析,结合仿真进一步分析了多米诺线圈位置对系统传输性能的影响规律。文献[28]针对多中继系统提出了一种通过在发射机侧实现功率因数控制来消除死区的方法。文献[29]设计了一种使用中继器线圈为多个负载提供几乎恒定的负载电流方法。文献[30]提出了一种基于失谐中继器的动态无线电能传输(Dynamic Wireless Power Transfer, DWPT)系统,以在逆变器数量减少的情况下提供相对恒定的功率。
(2)双向无线充电。在双向无线充电方面,文献[31]针对双向无线充电的拓扑及控制做了综述概要。文献[32]提出了双边E类单开关管变换拓扑的 双向无线电能传输(Bidirecitonal Wireless Power Transfer, BWPT)系统。文献[33]开发了电池充电器的控制策略,重点关注车载充电器功能所涉及的功率转换阶段的需求。文献[34]提出了一种利用驱动绕组来调节仅在初级侧传导的双侧相位差的双侧相移实现方法。
综上所述,有源中继的引入将每一个中继单元视作一个中继系统,其本质是实现了能量的逐级传递,中继系统不仅是一个能量传输介质,也可以作为发射或接收的能量叠加态。进一步地,双向充电的实现能够拓宽系统充电的维度,在一定程度上提高了配电的灵活性。因此,结合有源中继系统和双向传输的理念是激活设计灵活配置无线充电设备的关键。然而,在上述文献中,中继系统是依托于发射端固定的,其系统在一定程度上拓展了充电域,但该充电域是局限且死板的,双向传输的理念大多数也仅仅停留在两线圈结构的基础上,无法有效地构建可移动的充电域,利用中继系统和双向供电实现多模态的充电方式是本文主要努力改善的方向。
本文针对上述问题,提出一种基于准双向三态协同调度的AGV和UAV逐级式无线充电设计方法。该方法在合理利用有限数量的发射线圈的基础上设计电气参数,结合AGV和UAV设备的移动热点和组网功能,提供了一种基于三充电模态多级的准双向取电模式,在应用场地中可根据信息协同通信完成任意位置的对接充电,使得系统实现不同设备间的灵活取电配置。本文首先针对三模态准双向供电原理进行建模分析;其次根据电路方程推导输出特性的解析解;再次根据额定充电原则设计总体的组网方案和功率调节控制器;最后通过数据分析和实验验证了该方法的有效性。
针对工业或物流巡检车间背景,本文设计了一套基于准双向三态协同调度的“导轨—AGV— UAV”逐级式充电应用,其具体的系统架构示意图如图1所示,共分为三块区域:①导轨端。作为一级发射端,将能量通过电力变换装置发射到空间;②AGV负载端。作为一级接收端和二级发射端,通过安放在AGV底盘的拾取线圈取能,并从内部蓄电池取电经过二级电力变换装置将能量供给下一级设备,其中发射板安置在AGV上端的停机坪和变电盒中;③UAV和小型UAV负载端。作为二级取能终端在相应设计的停靠位置取电。同时,系统设计基于系统电气参数的稳定性和发射线圈在有限数量下的合理利用原则:①在系统端,分别结合AGV或UAV设备的移动特性构建可移动的充电区域,从而不需要设计其他的定点充电线圈;②在器件端,本文将谐振网络中有限的电感元件充分利用到耦合供能上来,使得物尽其用。总之,本文以导轨供电态、AGV供电态以及UAV供电态作为三种基本供电方法实现三态式逐级充电模式,同时实现部分模态的双向无线电能传输,并基于移动AGV的组网功能构建整个系统的能量协同调度方法。系统供电原则如下:
(1)图1所示为基本的导轨供电态模式,导轨通过配电网解决所有系统的综合取电问题。
(2)AGV本身具有移动特性,当其不在导轨的充电停靠岸时,可作为移动电源给各二级取电设备供电。
图1 系统架构示意图
Fig.1 System schematic
(3)当AGV不在导轨的充电停靠岸时,可以就大功率UAV终端设备取电,实现双向供能,由于小型UAV续航能力差,不允许小型UAV反向充电。
(4)当小型UAV在停靠岸之外需要续航时,可以AGV作为传输中继,将大型UAV的能量反向供给小型UAV。
系统电路原理如图2所示,考虑到多级取电设备对原边系统的干扰问题,导轨端采用LCC复合谐振拓扑作为第一级发射源以保证线圈电流的稳定性。AGV作为供电的二端网络可以看做一个储能中继,其既可以作为输入端(采用串列谐振拓扑)接收来自导轨端的发射能量,又可以作为输出端(采用LCL复合谐振拓扑)通过一系列电力变换拓扑和储能电池将能量逐级传给下端设备。终端取电设备主要以不同功率的UAV为主,均采用串列谐振拓扑结构。图2中,EDC为导轨输入电源,S1~S12为开关管,VD1~VD8为整流二极管,Lr1、Lr2为发射端串联补偿电感,Rr1、Rr2为其内阻,Cp1、Cp2为发射端并联补偿电容,Cr1为LCC串联电容,Lp1、Lp2、Ls1、Ls2、Ls3为耦合线圈,Rp1、Rp2、Rs1、Rs2、Rs3为其内阻,Cs1、Cs2、Cs3为接收端串联补偿电容,Cf1、Cf2为直流滤波电容,u1、u2为导轨端和AGV能量输出端的等效电压,up1、up2为能量发射端线圈的两端电压,RO1、RO2、RO3分别为AGV、UAV和小型UAV端的等效负载,M12、M23、M24分别为各端之间的互感。
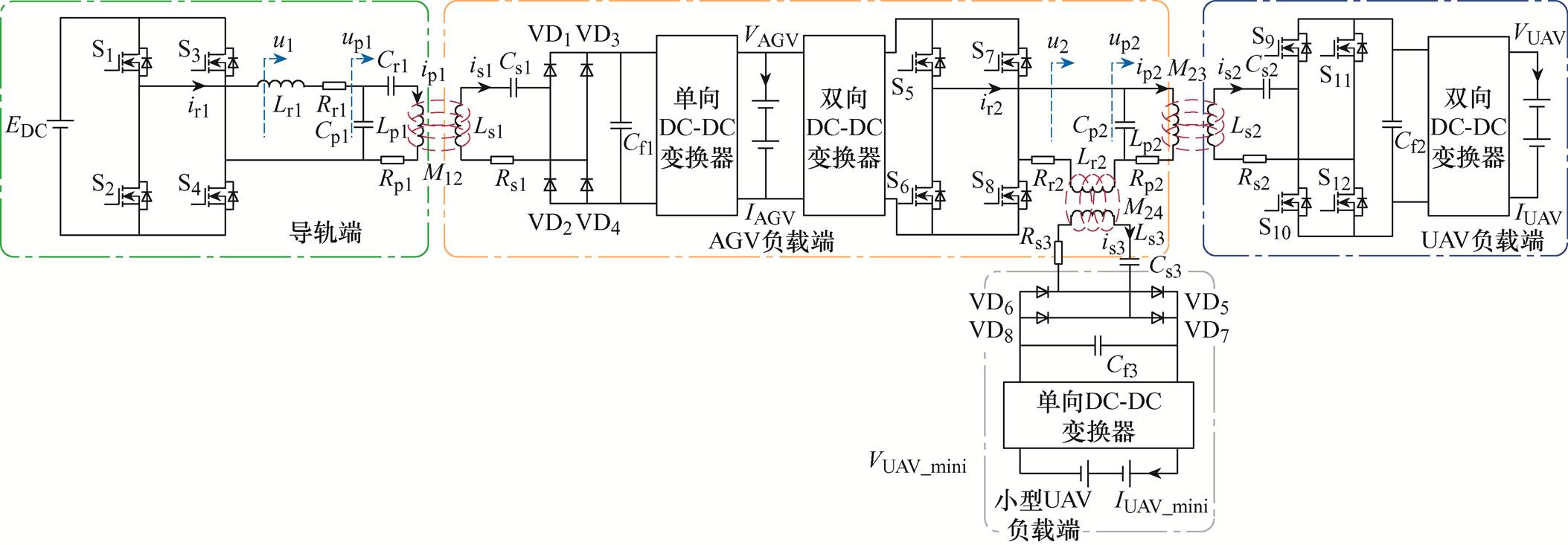
图2 系统电路原理
Fig.2 System circuit schematic diagram
以工业或物流巡检车间为例,结合AGV和不同款型UAV的共网系统,组建成基于协同调度的无线充电应用。本文从实际应用出发,结合双向充电特性和逐级充电模式,旨在提高充电的灵活性。所提出的准双向三态充电系统分别基于导轨供电态、AGV供电态以及UAV供电态三种模态,本节针对三种供电状态的具体馈电模型进行数学描述和能耗分析。
1)工作场景描述
当AGV巡检车工作完毕时,在自主导航的帮助下回到导轨充电带上进行充电,系统第一种工作状态即为导轨端为后级电路整体进行充电的模式(导轨—AGV—UAV),电路模型如图3所示。本文采用导轨作为发射源的原因为:①在某些工业或物流巡检车间的环境中,部分巡检路线具有一定的确定性;②导轨线圈能够完善AGV的循迹功能,AGV可以依据自主循迹功能进行分时段的自主补电;③构建宽范围-多负载静态补电区域的一部分,AGV独自从导轨取电即拥有静态特性也可以拥有动态特性,AGV动态取能实际为第一供电模态(导轨—AGV—UAV充电)的特殊情况。同时,导轨的设计理念出自于构建多AGV的拾能区域。因此,该模态导轨不仅能满足AGV的逐级静态拾能需求,也能满足一定的低速动态充电功能。
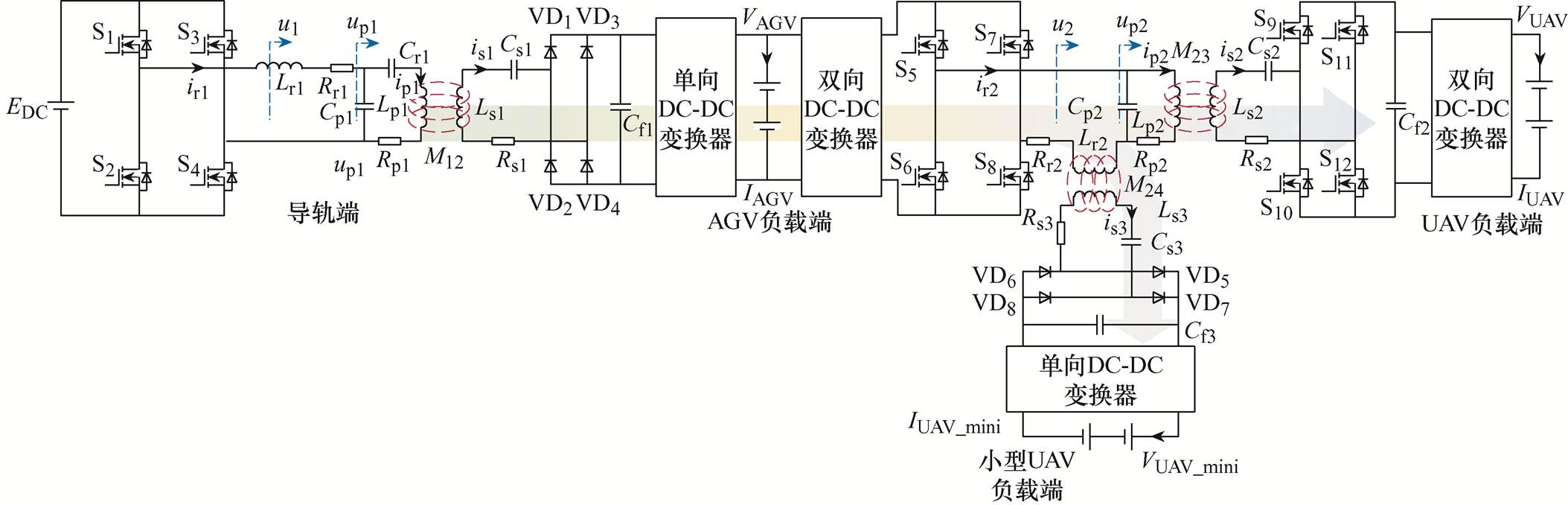
图3 导轨供电态系统电路原理
Fig.3 Circuit schematic diagram of rail power mode
为保证原边系统的谐振鲁棒性和电气稳定性,导轨从配电网络取电并将能量通过LCC-S拓扑传递给AGV的车载电池,此阶段的能量传输设计为单向的,因此在AGV输入端采用单侧的DC-DC模块。此外,AGV车载电池通过电源适配器将电能分散给内部各功能模块,其中一个接口将作为后级双侧UAV的取电端,在AGV自身取电的同时可以将能量继续分享给需要停机充电的UAV。此处,AGV能量输出端口的无线供电谐振网络采用LCL结构,为充分利用复合谐振网络的电感,将两个电路电感视作为线圈与UAV的串联谐振网络进行耦合。该供电态至少有一个AGV在取电,UAV最多有两个工作在取电状态。
2)应用系统供能建模与分析
为考虑尽可能最大化双拾取端的供电能力,本节供电模型以全工作为基础进行模型构建。为尽可能减少系统设计的复杂度,本文从最基本的负载端谐振匹配逻辑出发,系统各级部件遵从统一谐振频率的补偿条件,即满足
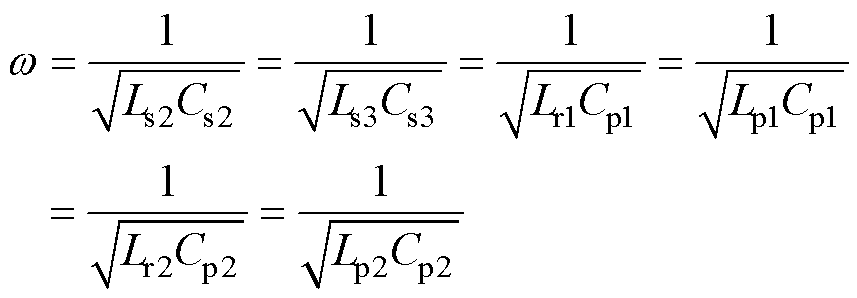 (1)
(1)
对于一体充电模态,根据KVL定理,其中导轨端到AGV端可表示为
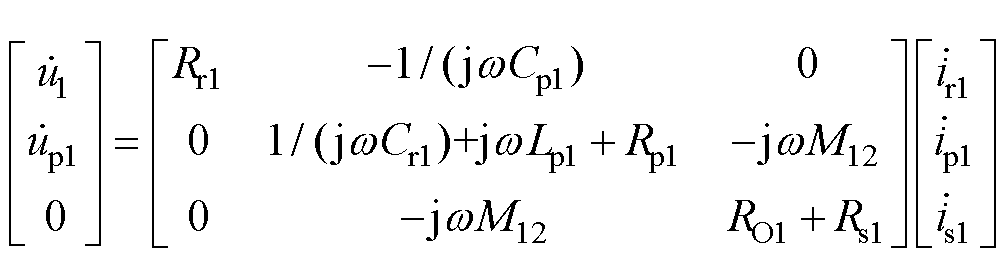 (2)
(2)
此外,AGV端到两UAV端可表示为
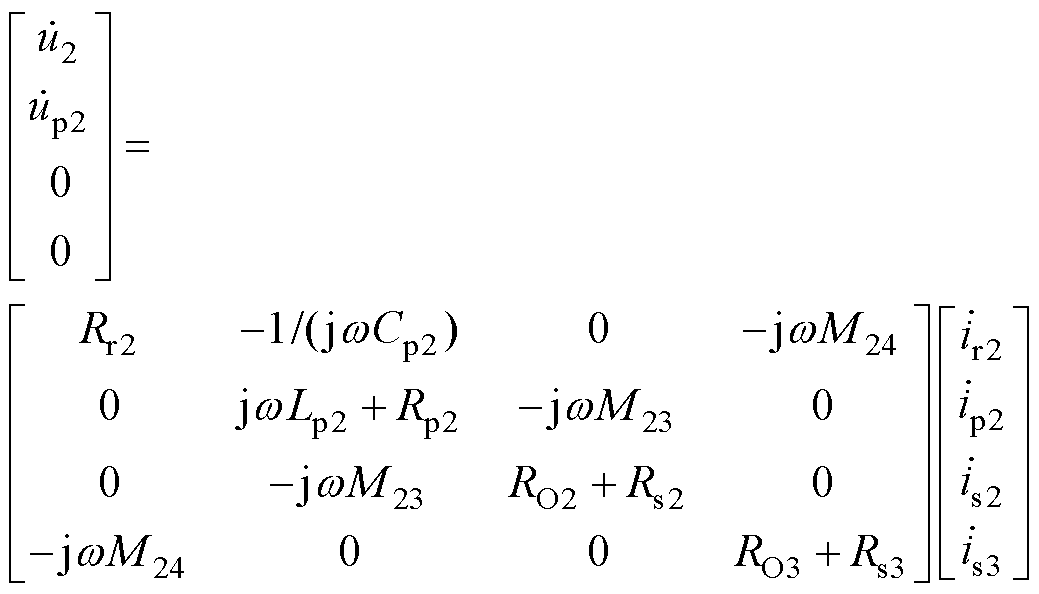 (3)
(3)
电池的直流等效电阻可简化为
 (4)
(4)
式中,Vdev和Idev分别为各级设备电池的直流电压和电流(如VAGV,IAGV)。
根据文献[8],以Buck-Boost模块为例,di为占空比,在不考虑开关损耗的情况下,各副边整流桥输入侧的等效负载可看作为
 (5)
(5)
式中,i代表第i负载端。
由式(2)简化的电流解析解可表示为
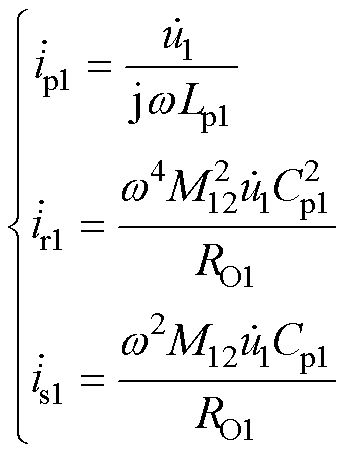 (6)
(6)
由式(3)简化的电流解析解可表示为
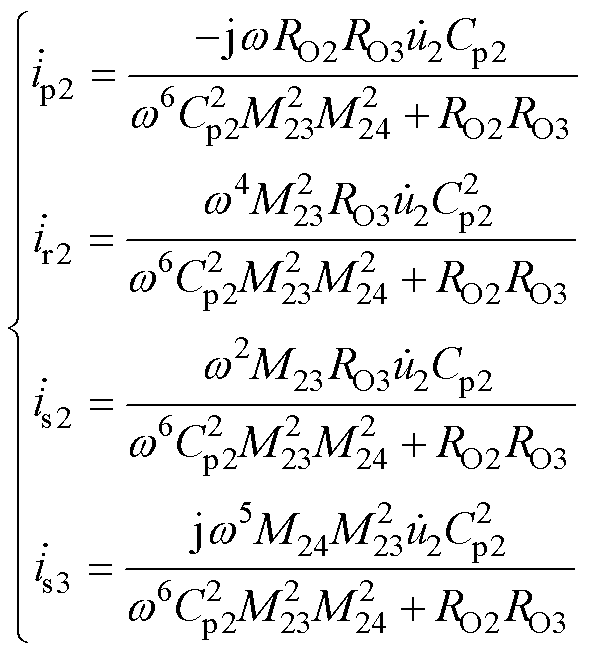 (7)
(7)
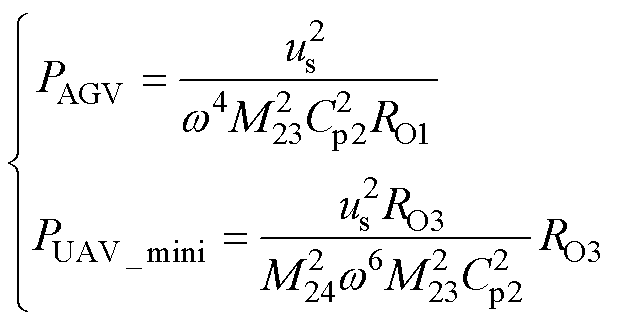
因此,AGV、UAV及四级端口的小型UAV功率可推导为
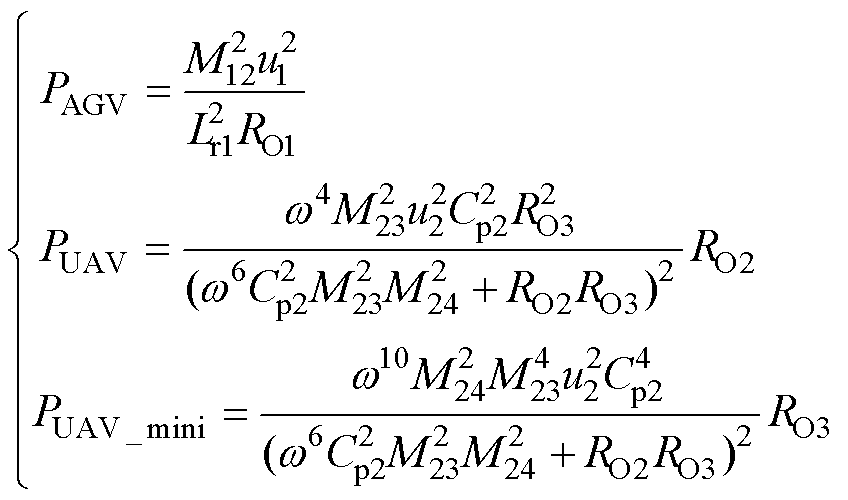 (8)
(8)
1)工作场景描述
AGV供电态系统原理如图4所示。当AGV离开充电区域进行巡检时,在自身蓄电池供电能力达标的情况下,可以作为一个独立的移动电源给就近需要及时充电的UAV设备进行充电,AGV在该系统中作为蓄能“网关”的作用,可控制传输电能的“流量”。每个AGV有两个输出端口,以LCL-S拓扑结构为设计基准,在保证发射端电气参数的稳定性和频率的鲁棒性基础上,轻量化终端设备的电路复杂度,其中两个补偿电感均可作为发射线圈。但由文献[21]可知,以能源输出端的电感为发射线圈的拓扑形式将在一定程度上影响AGV逆变输出端的等效阻抗,由于耦合产生的反射阻抗将产生一定的谐振频率漂移,为尽可能减少该部分的负面影响,设计低耦合互感下的低功率充电设备,该发射线圈一般用来给小功率的UAV进行充电,在该工况下一般至少有一个UAV在非导轨充电区的移动AGV上取电。
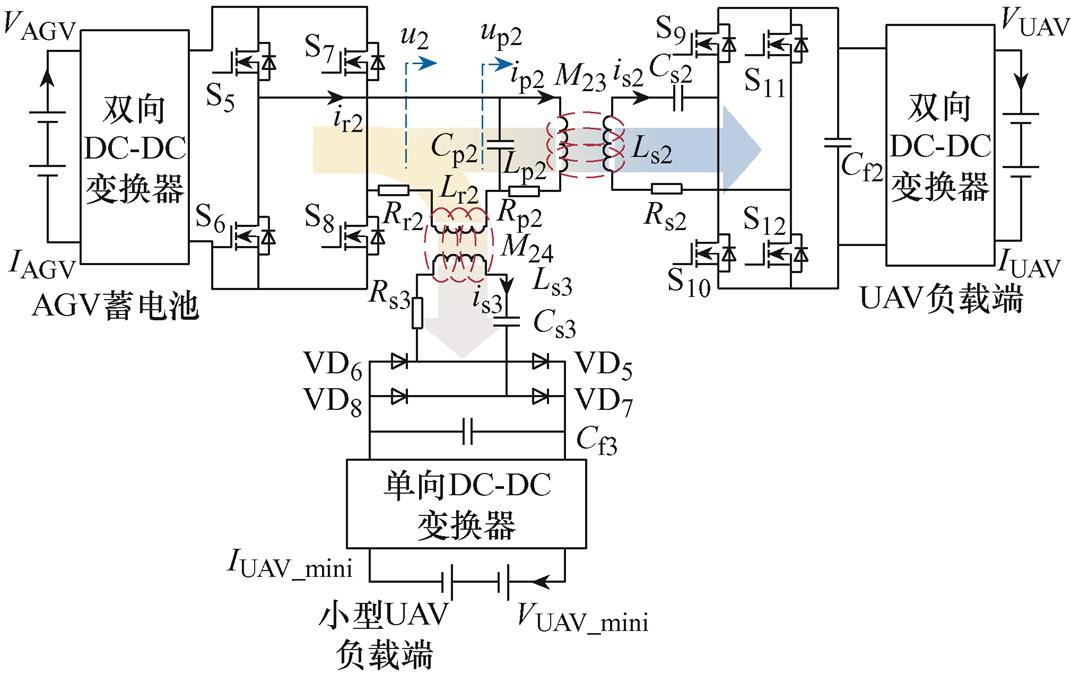
图4 AGV供电态系统原理
Fig.4 Circuit schematic diagram of AGV power mode
2)应用系统供能建模与分析
参考式(6)、式(7),此时各终端输出功率可表示为
 (9)
(9)
1)工作场景描述
UAV供电态系统原理如图5所示。当AGV或小型UAV在野外需要能量补给时,可通过选择就近大功率式的UAV进行供能补充,此时大功率UAV以自身携带电池为电源将能量发射回AGV端,并通过AGV的谐振网络构成的中继把能量传递给小型UAV,为了避免能量回流和干扰问题,在该工况下一般只有一个负载端,即AGV或小型UAV。同时,考虑到小型UAV本身电池容量较小,小型UAV一般不作为能量的供给端。此外,空中悬停补电是UAV能量交互的一个设计思路,但考虑到以下三点: ①线圈及变换电路的轻量设计造成的耦合难问题;②定点悬停控制难度大;③悬停充电的电磁干扰问题不予采用,不过该方案是后续研究的热点计划。
2)应用系统供能建模与分析
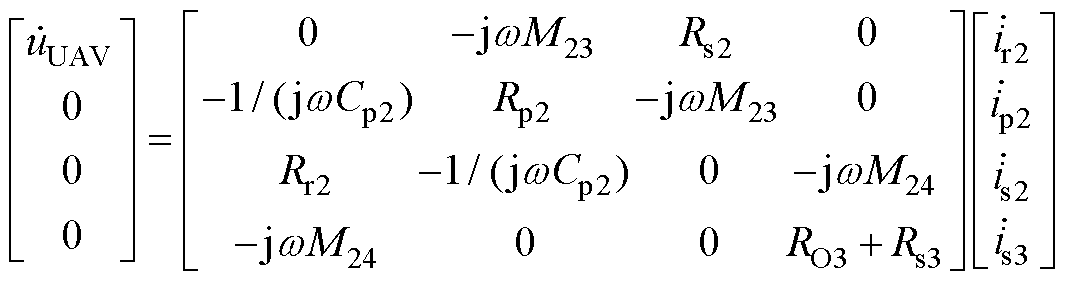
在该供电态,UAV作为能量发射端,当AGV取电时系统谐振拓扑为S-LCL,其中逆变器输出电压表示为uUAV,当小型UAV为取电端时,系统谐振模型为S-LCL-S。AGV作为供电负载时,其系统模型可表示为
图5 UAV供电态系统原理
Fig.5 Circuit schematic diagram of UAV power mode
 (10)
(10)
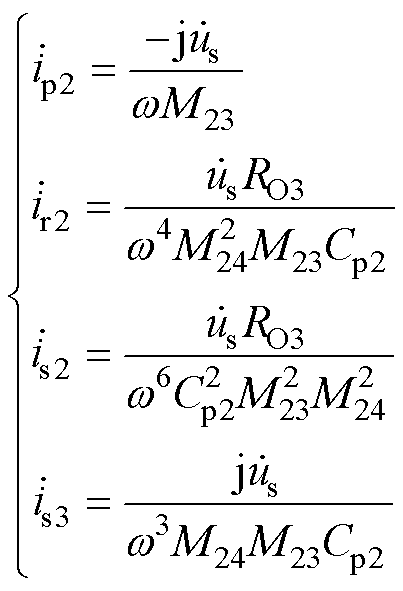
此时,各线圈电流的简化解析解为
 (11)
(11)
同理,当AGV的谐振网络作为无源谐振中继的时候,小型UAV的供电模型表示为
 (12)
(12)
该传输模态的简化电流表达式为
 (13)
(13)
由式(12)、式(13)可知,回传功率和小型UAV的拾取功率可简化推导为
 (14)
(14)
信息感知和协同是实现系统自主无线充电的关键,在以往的研究之中,通常有两类方法来构建信息协同的桥梁:①通过辅助电路和电气参数的波动监测来实现参数辨识[35-36];②通过辅助传感器和通信设备来进行识别[37-38]。实际上,基于辅助电路和电气参数的推演计算会提高控制设计的复杂度,并且其时间响应有待提高。本文的信息协同调度策略主要通过基于移动AGV热点的组网和单边功率调制器两部分来实现,其中通信组网的部分用来构建有充电需求和充电源之间的联系,一旦连接成功便通过各设备的功率调制器进行独立的闭环调制。
本文的信息协同调度策略基于移动AGV热点的组网和单边功率调制器两部分来共同完善。基于移动AGV热点的无线网络信息协同框架如图6所示,由AGV、UAV及小型UAV构成无线网络。其中,在AGV上安装了WIFI热点,保证其在移动的情况下给周边的无人机巡检设备提供信号传输通道。此外,AGV和UAV相继安装红外雷达和图像识别传感器,通过定位和导航协助设备找到充电位置,在减少电力控制设备复杂度的同时能够在短时间内根据充电需求辨识充电模态,无需更多的条件切换约束和能耗优化步骤。
三种充电模态是根据设备自身的充电需求和充电环境决定的,当AGV需要取电但未搜索到就近UAV时便自主返航到指定充电区域充电,此时若巡航UAV或UAV_mini也未搜索到关联移动电源时,便返航至指定充电区域通过模态一进行充电。同时AGV本身搭建的充电平台可作为取电中继,将能量传输给下一级取电设备。当AGV在电量足够的情况下巡检并收到UAV或UAV_mini设备的充电请求时,进行应答并实现模态二充电。当AGV需要取电并搜索到就近UAV关联网络时,或当UAV_mini需要取电并同时搜索到就近UAV和AGV关联网络时,可实现模态三供电。由此可知,AGV不仅可以作为一个移动的热点,同时也可以作为一个移动的无线供电电源。需要取电的设备AGV/UAV将充电需求的信息传播出去,根据就近原则,AGV/UAV收到充电通信需求时便作出应答。同时,分别作为供电端、中继端和接收端的三方设备或者只需要供电端和接收端的两方设备将根据定位信息开启自主导航,UAV和AGV将进一步对接,一旦对接成功将正式开启相应的供电模态。

图6 AGV/UAV组网序列
Fig.6 The sequence diagram of AGV/UAV
双向无线充电在越来越多的应用中受到青睐,由于其配电的灵活性和高互操作性,双向充电是实现无线多维度传能的关键因素。通常情况下,双向无线充电大致基于复杂的变化拓扑,其结合逆变电路各斩压模块和升压模块,来提高整体变换器的调节能力。此外,一般情况下双向无线供电系统通常需要原、副边的实时通信,并且在更少的辅助电路下需要实现更高的调制精度。对于在实时充电过程中的移动设备,双边通信在一定程度上增加了控制时延和控制器的设计复杂度,为了尽可能避免复杂功率流的条件控制设计,本文提出的准双向供电模式在构建组网过程中,根据充电需求便可确认模态以及功率流的流向,因此只需基于简单可靠的独立闭环功率调配,电压电流调节控制流程如图7所示。
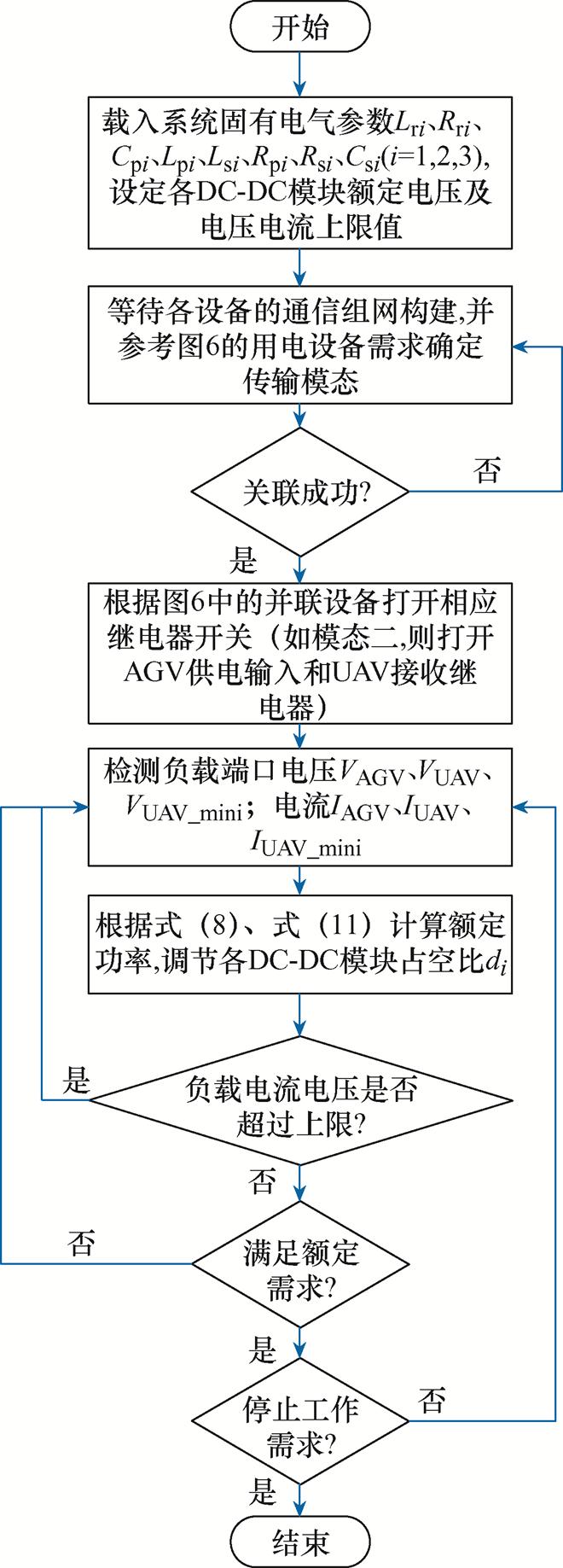
图7 电压电流调节控制流程
Fig.7 Voltage and current regulation control flow chart
各取电端电压电流调制控制步骤如下:
(1)载入系统固有电气参数Lri、Rri、Cpi、Lpi、Lsi、Rpi、Rsi、Csi,i=1,2,3,设定各DC-DC模块额定电压及电压电流上限值。
(2)等待各设备的通信组网构建,并参考图6根据用电设备需求确定传输模态。
(3)根据充电需求响应判定充电模态和充电方向,并打开相应关联设备继电器开关(如模态二,则打开AGV供电输入和UAV接收继电器)。
(4)检测负载端口电压VAGV、VUAV、VUAV_mini;电流IAGV、IUAV、IUAV_mini。
(5)根据式(8)、式(11)计算额定功率,调节各DC-DC模块占空比di。
(6)检测负载电流电压是否超过上限。
(7)各级取电设备判断电池是否有效充电;若否,回到步骤(4)。
(8)判断是否充电完成,若完成则结束。
为验证本文所提出的设计方法,基于准双向三态模式的逐级供电系统搭建的实验装置如图8所示,各供能级或取电级的细节如图9所示。在各供电端发射侧,逆变器开关管采用型号为IRFB4020PBF的MOSFETs,其驱动信号由型号为STM32F103C8T6的控制器产生。各级电路参数见表1。本文所设计的长导轨长约3 m,实验装置中小型无人机的线圈尺寸约为7 cm×3 cm,小型无人机整机尺寸约为14 cm×14 cm,而在本文的实验装置中,停机坪的支架尺寸为31 cm×22 cm。由于实验场地在室内,楼层安置的钢筋对导轨的内阻影响较大,因此在底部安置了铝板屏蔽,但考虑到避免充电导轨的厚度对移动AGV的影响,此处采用薄铝板。
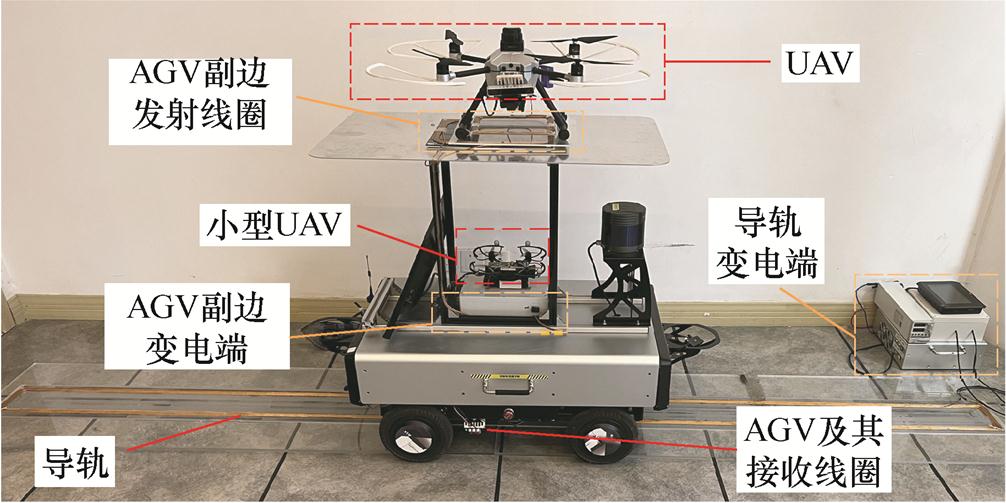
图8 系统实验装置
Fig.8 Experimental setup
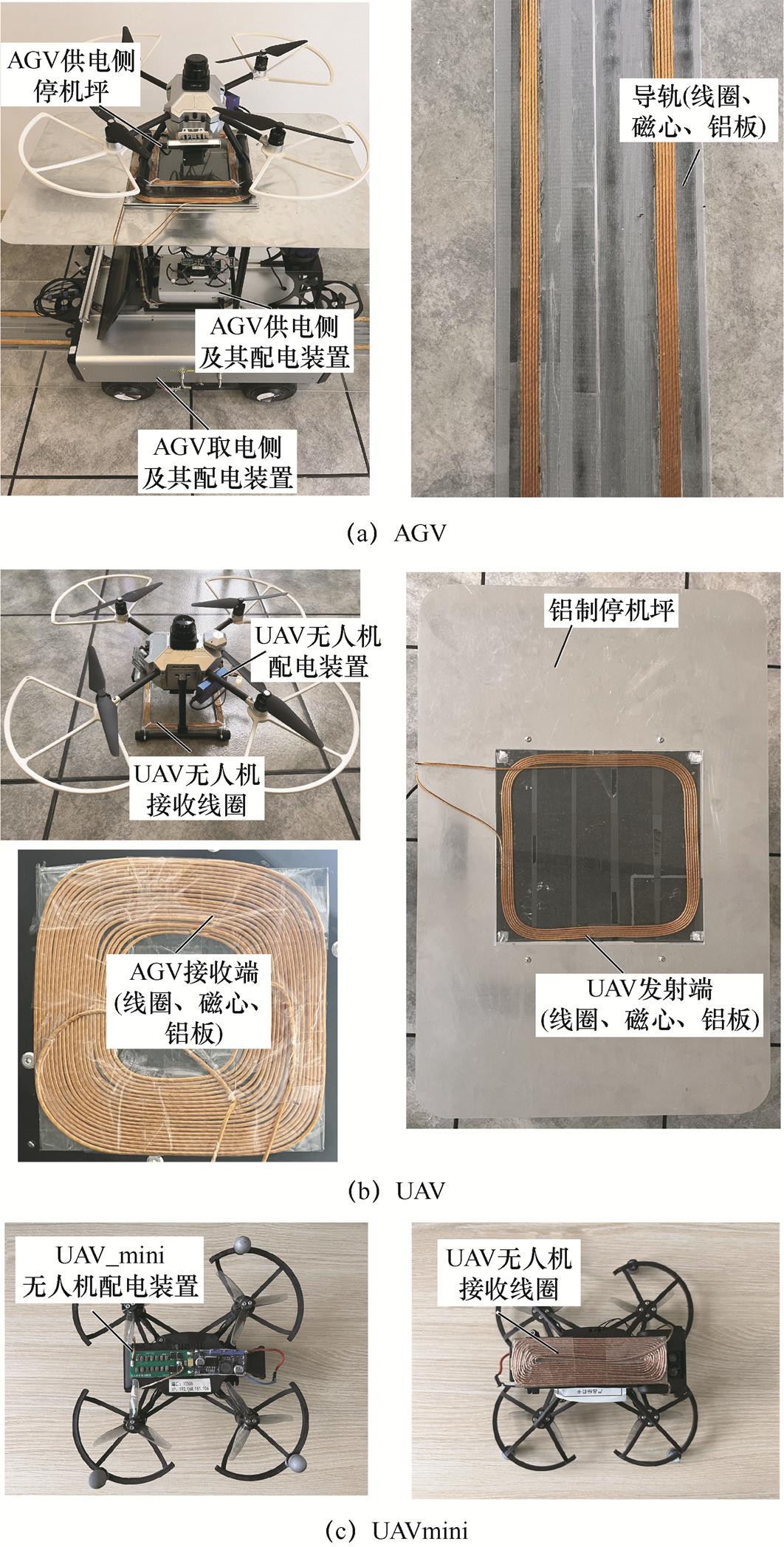
图9 各级设备装置
Fig.9 Equipment diagram of each power levels
表1 系统参数
Tab.1 Parameters of the system
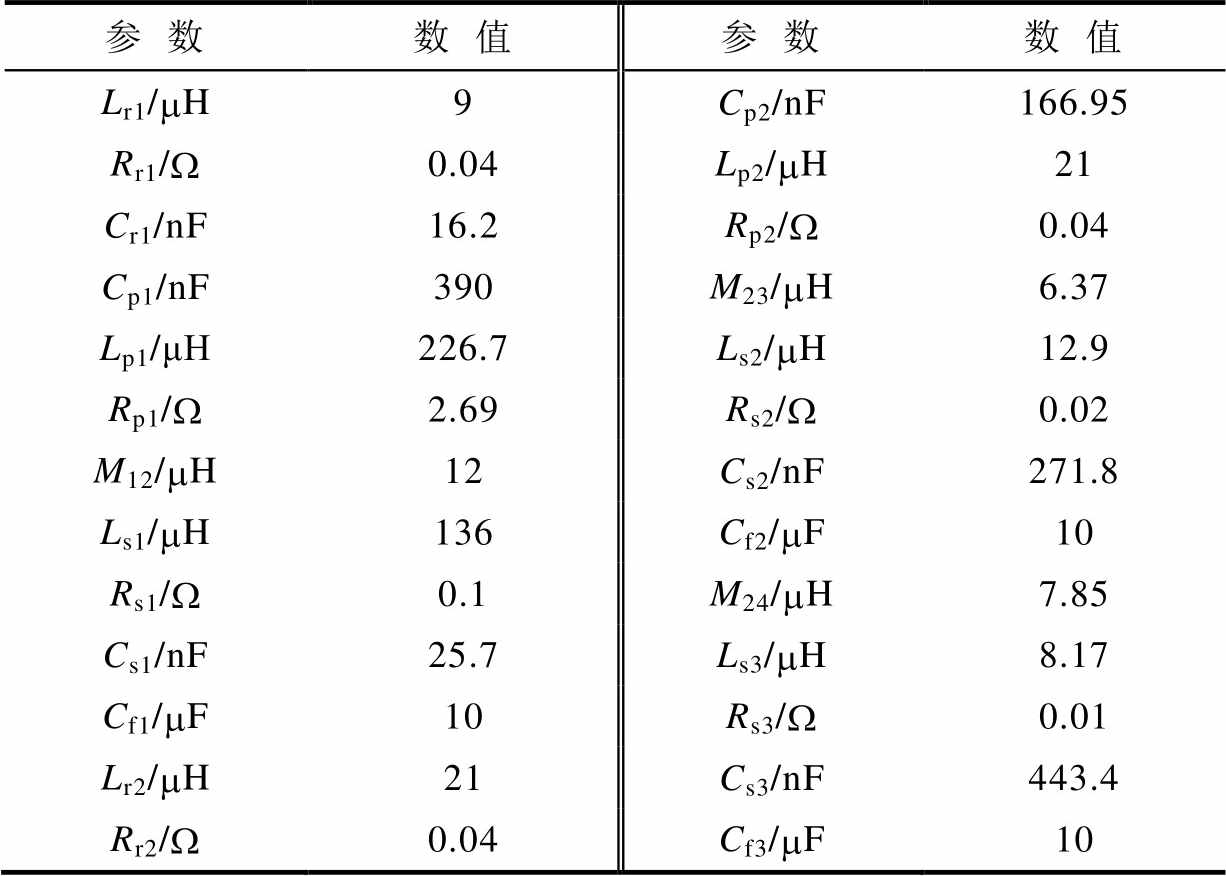
参数数值参数数值 Lr1/mH9Cp2/nF166.95 Rr1/W0.04Lp2/mH21 Cr1/nF16.2Rp2/W0.04 Cp1/nF390M23/mH6.37 Lp1/μH226.7Ls2/mH12.9 Rp1/W2.69Rs2/W0.02 M12/mH12Cs2/nF271.8 Ls1/mH136Cf2/mF10 Rs1/W0.1M24/mH7.85 Cs1/nF25.7Ls3/mH8.17 Cf1/mF10Rs3/W0.01 Lr2/mH21Cs3/nF443.4 Rr2/W0.04Cf3/mF10
本文采用的AGV额定充电电压53 V,电流2.7 A,仿真及数据分析代入电阻为19.6 W,UAV额定充电电压13 V,电流1.8 A,代入电阻为7.3 W,小型UAV充电电压11.5 V,电流1.1 A,代入电阻为10 Ω。根据表1系统设计参数,主要分析系统各供电及取电端的增益是否满足,并且工作频率是否能够维持发射端等效阻抗的相位在零相位点。
如图10所示为系统工作频率20~150 kHz范围内各二端网络的电压增益情况,由于本系统采用单边不可控的双向供电策略,AGV-UAV的增益与UAV-AGV的增益几乎是可逆的。由图10可知,在工作频率85 kHz时,导轨-AGV的增益为1.32,AGV-UAV的两端增益为0.3,AGV-UAV_mini的增益为0.25,UAV-UAV_mini的增益为5.8,均能满足充电的额定需求。此外,由于各供电二端网络的拓扑不一致,在不同工作频率下该二端网络的增益会有所不同,其中对于UAV-UAV_mini的S-LCL-S结构在工作频率为60 kHz时达到最大,导轨-AGV的LCC-S拓扑和AGV-UAV_mini的LCL-S拓扑增益几乎在20~150 kHz的频率范围内逐步增加,对于AGV-UAV端的S-LCL拓扑在工作频率约120 kHz时达到最高,但增益增加并不代表系统的稳定和高效,针对该供电情况,需进一步结合系统等效阻抗的相位变化来判断。

图10 频率变化下各模态系统增益
Fig.10 Gain of each mode under frequency variation
图11所示为系统工作频率20~150 kHz范围内各二端网络的等效阻抗相位曲线。整机系统在各模态工作时,输入等效阻抗均在85 kHz左右的工作频率下存在一个相位为零的点,即阻抗无虚部。其中对于导轨-AGV和AGV-UAV两供电级系统存在多谐振点,AGV-UAV_mini和UAV-UAV_mini两供电级只存在一个谐振点,为保证系统逐级传输的能效最优化,工作频率需稳定在85 kHz。
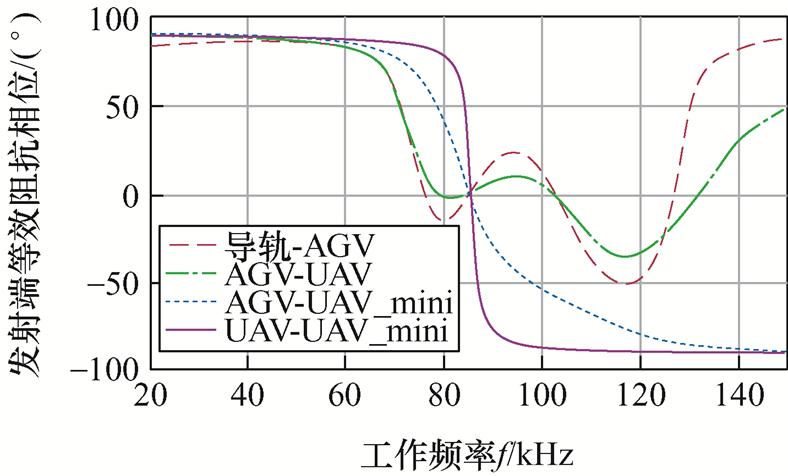
图11 频率变化下各模态输入等效阻抗相位
Fig.11 Equivalent impedance phase angle of each mode under frequency variation
为了避免磁场的交互干扰带来频率漂移或功率波动,本设计方案并未采用并行充电的模态,每一种模态均为独立进行。本文的充电模态虽然均为独立,但对于第一种模态,实际上所有充电设备都在进行同时充电,因此也对该部分各级取能或发射端都作了相关的屏蔽设计,屏蔽装置设计的仿真模型如图12所示。
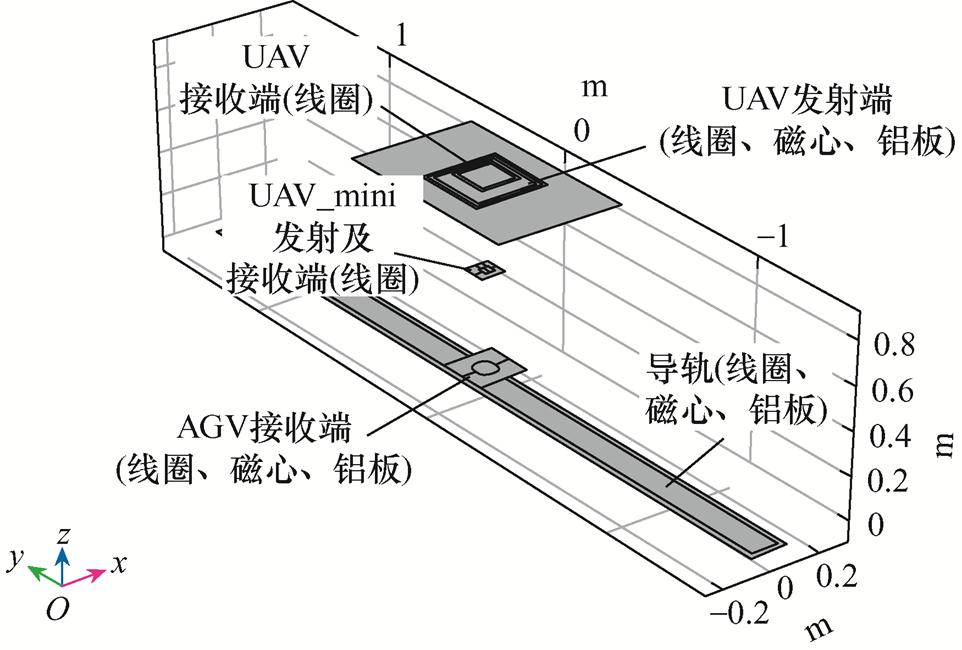
图12 屏蔽装置COMSOL仿真模型
Fig.12 COMSOL simulation model of shielding device
由图12可知,主要针对导轨和UAV做了屏蔽设计,UAV_mini发射和接收端及UAV接收端均由于不适宜负重过大并未采用相关屏蔽的集成。对于第一级供电端的导轨和AGV均采用铝板(底层)、磁心(中间层)及线圈(顶层)的结构,其中导轨外环尺寸为3 m×0.15 m,线径为0.003 m共6匝单层,导轨磁心和导轨铝板均为3 m×0.15 m×0.002 m,并封装于凹槽亚克力板中。AGV拾取线圈外环尺寸为0.2 m×0.2 m,线径为0.003 m共20匝单层,AGV磁心和铝板均为0.2 m×0.2 m×0.002 m。在AGV的二次发射端,UAV停机坪为0.82 m×0.5 m×0.001 m的铝板,其中发射端采用铝板(底层)、磁心(中间层)及线圈(顶层)的结构。AGV二次发射端铝板和磁心尺寸为0.3 m×0.3 m×0.002 m,其发射线圈尺寸为0.28 m×0.28 m,线径为0.003 m共6匝单层。UAV拾取端未做屏蔽,其外环尺寸为0.18 m×0.18 m,线径为0.003 m共5匝单层。UAV_mini的发射线圈尺寸为0.1 m×0.1 m,线径为0.001 m共15匝单层,UAV_mini的接收线圈尺寸为0.07 m×0.03 m,线径为0.001 m共12匝单层。根据实际激励电流有效值,三个供电模态下的磁场分布和屏蔽效果如图13所示。
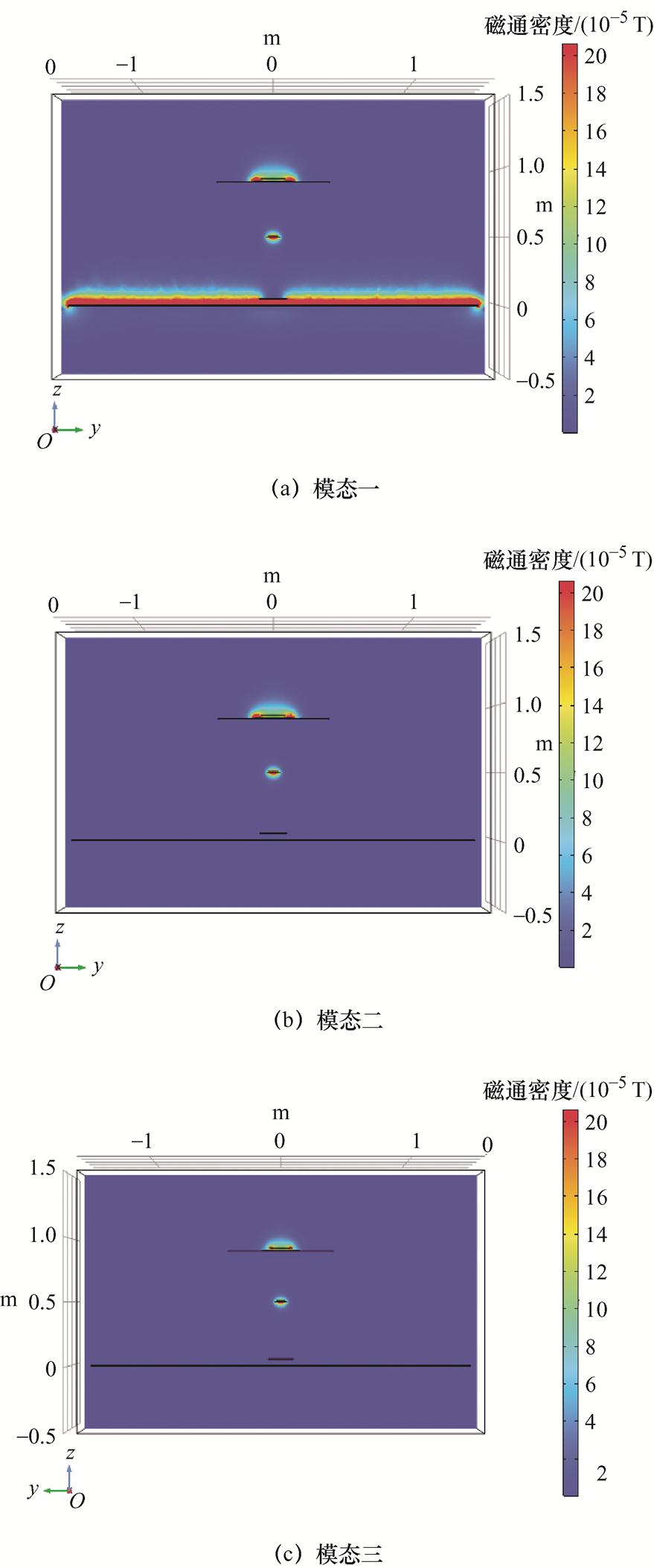
图13 屏蔽装置COMSOL仿真结果(f(1)=85 kHz)
Fig.13 COMSOL simulation results of shielding device(f(1)=85 kHz)
由图13a所示,当系统工作在第一模态时,AGV拾取线圈位于导轨中心,拾取线圈底部的铝板使得磁场色温分布出现骤减,其磁通密度对其他级的供电侧或拾取侧几乎没有影响。同理,在图13b中,AGV作为供电源从停机坪顶部发射线圈,停机坪以下的位置均有良好的屏蔽效果。在图13c中,当UAV作为能量供给端时,其磁场被AGV二次线圈紧密捕捉,其分布的磁场对于其他供电端的影响也几乎为零。
本节选取提出的三种供电模态进一步阐述系统逐级和双向供电机制。当系统工作在模态一时,即导轨—AGV—UAV供电模式,系统实验波形如图14所示。其中,图14a所示为导轨供电端的逆变电压输出及电流波形,通过软启动实现,本系统导轨变电端采用的转压模块将工频220 V转换为48 V的直流电压,u1=85 kHz的交流方波电压。ir1为逆变输出电流,其有效值为8.01 A。VAGV为AGV拾取电压平均值,VAGV=53.6 V。本装置在参数设计时,为保证一定软开关特性构建了原边导轨的弱感性等效阻抗,可以看到,图中导轨发射端的逆变电流和电压存在一定滞后。图14b为模态一下的各UAV拾取电压,其中VUAV=13.5 V,VUAV_mini=11.3 V,均达到各级电池的额定充电电压。此外,图14c为AGV在导轨上慢速行驶时的动态充电输入输出波形,其中竖线部分为AGV正式启动行驶的时刻t0,在该响应时刻输入输出波形有一些尖峰和超调,此后可以看到当AGV以大约0.5 m/s左右的速度在导轨上来回行驶的时候,DC-DC模块的控制器调节几乎能够将动态移动AGV的拾取电压稳定在额定电压。
当系统工作在模态二时,即AGV-UAV供电模式,图15为该模态下的系统相关输入输出波形。图15a中,VAGV_in和VAGV_out分别为AGV能量发射端的电池输入电压和经过DC-DC模块后的逆变器输出电压,其中VAGV_in=53 V,VAGV_out=48 V。u2为AGV供电端的逆变输出电压,即频率为85 kHz的48 V幅值方波电压。ir2为AGV配电模块逆变器的输出电流,其方均根为0.85 A。在模态二的能量拾取侧,UAV供电电压VUAV和小型UAV供电电压VUAV_mini均稳定在13.3 V和12.3 V。
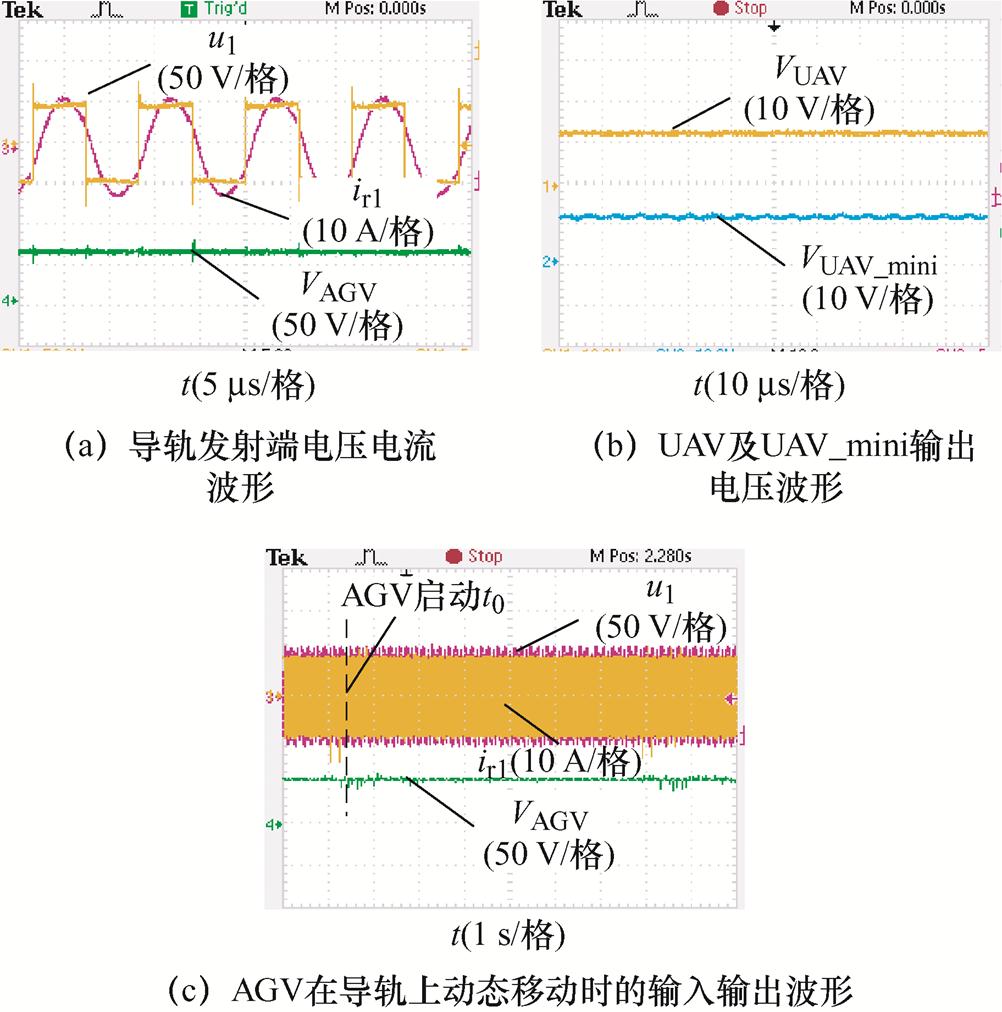
图14 模态一系统工作相关波形
Fig.14 Experimental waveforms of related voltage and current under mode 1
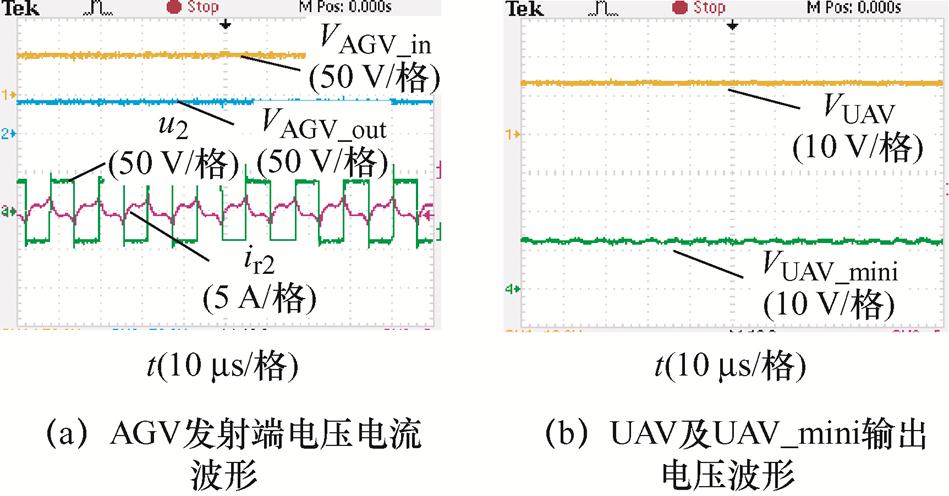
图15 模态二系统工作相关波形
Fig.15 Experimental waveforms of related voltage and current under mode 2
当系统工作在模态三时,即UAV-AGV供电模式。图16为该模态下的系统相关输入输出波形。图16中,u3=85 kHz的交流方波电压,其幅值为13 V。is3为UAV作为供电源时的逆变输出电流,其有效值为1.92 A。VAGV和VUAV_mini分别为在该模态下的AGV和小型UAV输出电压,分别为52.6 V和11.2 V。
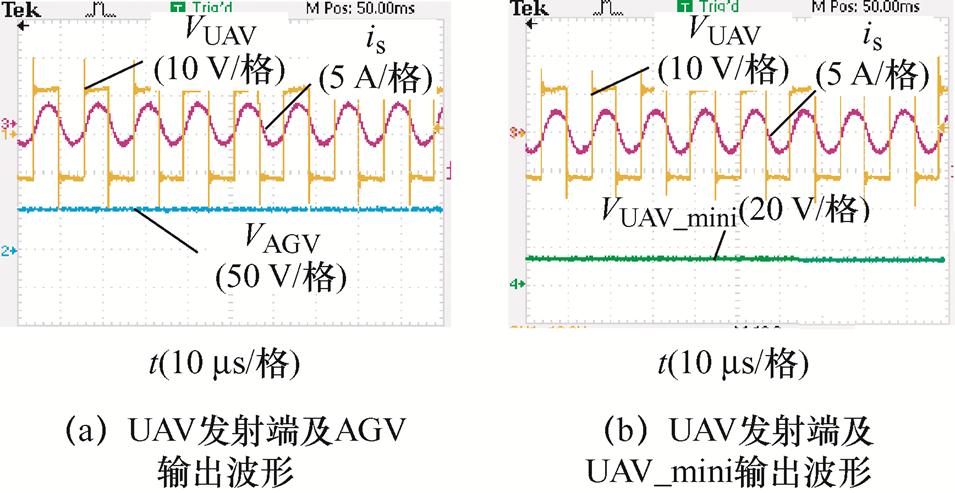
图16 模态三系统工作相关波形
Fig.16 Experimental waveforms of related voltage and current under mode 3
当整机系统同时运行时,系统有两个发射源分别为导轨和AGV自带电池,由本文图14所示实验结果以及系统整体参数表1可知,导轨直流输入电压为48 V,电流为6.6 A,为了保证电压电流的软切换,发射导轨的谐振网络匹配在一个弱感性,因此图14a中的电压电流波形有一定滞后,相位约为25°,逆变输出电压方波幅值48 V,逆变输出电流8.01 A。AGV电池二端网络输入电压为53.6 V、电流3 A,二端网络输出电压为53 V、电流0.75 A,后级UAV输出电压为13.5 V、电流2 A,小型UAV输出电压为11.3 V、电流1.2A,整机充电效率低的原因主要来自于导轨内阻损耗。由于实验场地在一楼室内,楼层底部安置的钢筋对导轨的内阻影响较大,当导轨放置在桌面进行LCR测量时,其内阻为0.4 Ω;而当导轨放置在地板时,其内阻显著增大。因此在线圈底部安置了铝板和磁心屏蔽,但考虑到避免屏蔽层厚度对AGV移动的影响,此处采用和线圈尺寸等宽的薄铝板和磁心,内阻仍有2.69 W,该部分的损耗几乎占据整机损耗的30%左右。AGV作为发射端时,AGV输入电压为48 V,电流0.85 A,后级UAV输出电压为13 V,电流1.8 A,小型UAV输出电压为11.5 V,电流1.1 A,可计算不考虑导轨的后级整机系统充电效率约为90%。对于室内场所巡检/物流机器人的无线充电系统,针对该问题的解决方案可以采用面积更大的屏蔽层、分布式切换导轨或通过底板垫置提高线圈与地面的距离,从而尽可能减小楼层金属对导轨的影响。
针对移动机器人的巡检应用场景,以充电灵活性和便利性为目标,结合物联网和自动巡航及图像识别等技术,提出一种基于准双向三态协同调度的AGV和UAV逐级式无线充电应用设计方法。实验验证了该方法的可行性和有效性。综上所述,本系统具有以下优势:
1)构建三态逐级传输模式,各取电级设备在统一的工作频率下可根据充电需求自主选择不同的充电场所(导轨、停机坪)进行充电。
2)基于导轨—移动AGV—UAV的供电结构,结合AGV和UAV的自主巡航和通信功能,能够同时实现导轨静态充电,导轨动态充电,移动AGV任意定点供电,AGV不仅能作为一个中继也是一个移动带源系统,大大提升了取电的灵活性和便利性。
3)构建准双向供电功能,使得后级取电设备能在巡检空间中的任意位置实现能量对接和交互。
本文的研究进一步丰富了移动机器人无线充电应用设计的理论体系,同时也为多无线供电设备在各应用环境的无线电能传输组网实践提供工程参考,对WPT技术在智能家居、工业物联网设备、传感器等领域的产业化和商业化提供新思路。
参考文献
[1] 谭平安, 许文浩, 上官旭, 等.无线电能传输系统中组合串绕六边形线圈的互感建模及参数优化[J]. 电工技术学报, 2023, 38(9): 2299-2309.
Tan Ping'an, Xu Wenhao, Shangguan Xu, et al. Mutual inductance modeling and parameter optimization of wireless power transfer system with combined series-wound hexagonal coils[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(9): 2299-2309.
[2] 贾舒然, 段善旭, 陈昌松, 等. 实现效率优化的无线电能传输系统双侧多周期不对称电压激励方法[J]. 电工技术学报, 2023, 38(17): 4597-4609.
Jia Shuran, Duan Shanxu, Chen Changsong, et al. Dual-side multi-period asymmetrical voltage excitation control for wireless power transfer system for efficiency optimization[J]. Transactions of China Electrotechnical Society, 2023, 38(17): 4597-4609.
[3] 周玮, 高侨, 陈泽林, 等. 基于同侧解耦型电场耦合机构的多发射多接收无线电能传输系统[J]. 电工技术学报, 2023, 38(18): 4811-4822.
Zhou Wei, Gao Qiao, Chen Zelin, et al. Same-sided decoupled electric-field coupler based wireless power transfer system with multi-transmitter and multi- receiver[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 4811-4822.
[4] 程志远, 陈坤, 李东东, 等. 旋转式无线充电系统偏移特性研究[J]. 电工技术学报, 2021, 36(22): 4648-4657.
Cheng Zhiyuan, Chen Kun, Li Dongdong, et al. Research on offset characteristics of rotary wireless charging system[J]. Transactions of China Electro- technical Society, 2021, 36(22): 4648-4657.
[5] Hasaba R, Okamoto K, Kawata S, et al. Magnetic resonance wireless power transfer over 10 m with multiple coils immersed in seawater[J]. IEEE Transactions on Microwave Theory and Techniques, 2019, 67(11): 4505-4513.
[6] Guida R, Demirors E, Dave N, et al. Underwater ultrasonic wireless power transfer: a battery-less platform for the internet of underwater things[J]. IEEE Transactions on Mobile Computing, 2022, 21(5): 1861-1873.
[7] 武帅, 蔡春伟, 陈轶, 等. 多旋翼无人机无线充电技术研究进展与发展趋势[J]. 电工技术学报, 2022, 37(3): 555-565.
Wu Shuai, Cai Chunwei, Chen Yi, et al. Research progress and development trend of multi-rotor unmanned aerial vehicles wireless charging tech- nology[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 555-565.
[8] 刘哲, 苏玉刚, 邓仁为, 等. 基于双边LC补偿的单电容耦合无线电能传输系统[J]. 电工技术学报, 2022, 37(17): 4306-4314.
Liu Zhe, Su Yugang, Deng Renwei, et al. Research on single capacitive coupled wireless power transfer system with double-side LC compensation[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(17): 4306-4314.
[9] 杨庆新, 张献, 章鹏程. 电动车智慧无线电能传输云网[J]. 电工技术学报, 2023, 38(1): 1-12.
Yang Qingxin, Zhang Xian, Zhang Pengcheng. Intelligent wireless power transmission cloud network for electric vehicles[J]. Transactions of China Electrotechnical Society, 2023, 38(1): 1-12.
[10] Dai Xin, Wu Jinde, Jiang Jincheng, et al. An energy injection method to improve power transfer capability of bidirectional WPT system with multiple pickups[J]. IEEE Transactions on Power Electronics, 2021, 36(5): 5095-5107.
[11] 宋钊, 刘明. 模块化多端口无线电能DC-DC变换器建模及其多向功率流解耦控制策略[J]. 电工技术学报, 2022, 37(24): 6262-6271.
Song Zhao, Liu Ming. Modular multiport wireless DC-DC converter with multidirectional power flow and its decoupling control strategy[J]. Transactions of China Electrotechnical Society, 2022, 37(24): 6262- 6271.
[12] 陈凯楠, 蒋烨, 檀添, 等. 轨道交通350kW大功率无线电能传输系统研究[J]. 电工技术学报, 2022, 37(10): 2411-2421, 2445.
Chen Kainan, Jiang Ye, Tan Tian, et al. Research on 350kW high power wireless power transfer system for rail transit[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2411-2421, 2445.
[13] 陈志鑫, 张献, 沙琳, 等. 基于频率调节的电动汽车无线充电互操作性提升方法研究[J]. 电工技术学报, 2023, 38(5): 1237-1247.
Chen Zhixin, Zhang Xian, Sha Lin, et al. Research on improving interoperability of electric vehicle wireless power transfer based on frequency adjustment[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1237-1247.
[14] Chu S Y, Cui Xiaofan, Zan Xin, et al. Transfer-power measurement using a non-contact method for fair and accurate metering of wireless power transfer in electric vehicles[J]. IEEE Transactions on Power Electronics, 2021, 37(2): 1244-1271.
[15] Sedehi R, Budgett D, Jiang Jincheng, et al. A wireless power method for deeply implanted biomedical devices via capacitively coupled conductive power transfer[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 1870-1882.
[16] Minguillon J, Tudela-Pi M, Becerra-Fajardo L, et al. Powering electronic implants by high frequency volume conduction: in human validation[J]. IEEE Transactions on Biomedical Engineering, 2023, 70(2): 659-670.
[17] 蔡春伟, 姜龙云, 陈轶, 等. 基于正交式磁结构及原边功率控制的无人机无线充电系统[J]. 电工技术学报, 2021, 36(17): 3675-3684.
Cai Chunwei, Jiang Longyun, Chen Yi, et al. Wireless charging system of unmanned aerial vehicle based on orthogonal magnetic structure and primary power control[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3675-3684.
[18] Pan Shuaishuai, Xu Yefei, Lu Yuanfang, et al. Design of compact magnetic coupler with low leakage EMF for AGV wireless power transfer system[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 1044-1052.
[19] Wang Yi, Li Ming, Yang Zhongping, et al. Analysis and comparison of SP and S/SP compensated wireless power transfer system for AGV charging[C]//2020 IEEE 3rd International Conference on Electronics Technology (ICET), Chengdu, China, 2020: 485-488.
[20] Rong Chao, Zhang Bo, Jiang Yanwei, et al. A misalignment-tolerant fractional-order wireless charging system with constant current or voltage output[J]. IEEE Transactions on Power Electronics, 2022, 37(9): 11356-11368.
[21] 童湛安心, 苏建徽, 张健, 等. AGV无线充电全波同步整流尖峰电压抑制方法[J]. 电气传动, 2023, 53(3):22-27.
Tong Zhan'anxin, Su Jianhui, Zhang Jian, et al. Suppression method of spike voltage of AGV wireless charging by full-wave synchronous rectification[J]. Electric Drive, 2023, 53(3):22-27.
[22] Kanazawa H, Uwai H, Kiuchi S, et al. Receiver- position-based unbalanced-current control for a three- to single-phase wireless power transfer system for AGVs[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 3245-3256.
[23] Sun Min, Dai Xin, Zhao Lei, et al. Self-organized wireless power transfer network for group electronics devices application[C]//2022 Wireless Power Week (WPW), Bordeaux, France, 2022: 797-801.
[24] Dong Shiwei, Li Xiaojun, Yu Xumin, et al. Hybrid mode wireless power transfer for wireless sensor network[C]//2019 IEEE Wireless Power Transfer Conference (WPTC), London, UK, 2020: 561-564.
[25] 赵志浩, 孙跃, 呼爱国, 等. 能量自治无线电能传输微网及其簇群机制[J]. 华中科技大学学报(自然科学版), 2016, 44(9): 49-54.
Zhao Zhihao, Sun Yue, Hu Aiguo, et al. Cluster mechanism of wireless power transfer microgrid under energy autonomy[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2016, 44(9): 49-54.
[26] Xiang Lijuan, Sun Yue, Dai Xin, et al. The cross entropy method for multi-disjoint energy route design of wireless power transfer network[C]//2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 2015: 1969-1973.
[27] 王维, 曾振炜, 王劼忞, 等. 输电杆塔无线供电系统非均匀多米诺单元性能分析与优化[J]. 电工技术学报, 2022, 37(17): 4315-4325.
Wang Wei, Zeng Zhenwei, Wang Jiemin, et al. Performance analysis and optimization of non- uniform domino unit in wireless power supply system of transmission tower[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4315-4325.
[28] Shikauchi Y, Matsumoto R, Nagai S, et al. Eliminating dead zone in wireless power transfer with repeater coil by power factor control[C]//2023 IEEE Wireless Power Technology Conference and Expo (WPTCE), San Diego, CA, USA, 2023: 1-6.
[29] Cheng Chenwen, Lu Fei, Zhou Zhe, et al. A multiload inductive power transfer repeater system with constant load current characteristics[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(4): 3533-3541.
[30] Xiong Wenjing, Yu Qihui, Liu Zixi, et al. A detuning-repeater-based dynamic wireless charging system with quasi-constant output power and reduced inverter count[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 1336-1347.
[31] 黄珺, 何许国, 霍鹏冲. 基于模态分析的LCC-LCC型双向无线电能传输系统软开关优化控制研究[J]. 中国电机工程学报, 2023, 43(17): 6816-6828.
Huang Jun, He Xuguo, Huo Pengchong. Research on soft-switching optimal control of LCC-LCC compensated bidirectional wireless power transfer system based on modal analysis[J]. Proceedings of the CSEE, 2023, 43(17): 6816-6828.
[32] Li Kerui, Tan S C, Hui R S Y. Low-cost single-switch bidirectional wireless power transceiver for peer- to-peer charging[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(3): 3781-3790.
[33] Bertoluzzo M, Kumar A, Sagar A. Control strategy for a bidirectional wireless power transfer system with vehicle to home functionality[J]. IEEE Access, 2023, 11: 60421-60448.
[34] Zhang Yiming, Chen Shuxin, Li Xin, et al. Dual-side phase-shift control of wireless power transfer implemented on primary side based on driving windings[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 8999-9002.
[35] Kobayashi D, Imura T, Hori Y. Real-time coupling coefficient estimation and maximum efficiency control on dynamic wireless power transfer for electric vehicles[C]//2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW), Daejeon, Korea (South), 2015: 1-6.
[36] Jiwariyavej V, Imura T, Hori Y. Coupling coefficients estimation of wireless power transfer system via magnetic resonance coupling using information from either side of the system[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(1): 191-200.
[37] Suzuki K, Shigeta R, Kawahara Y, et al. Bilateration-based position estimation of sensor nodes for UAV-assisted wireless power transfer systems[C]// Proceedings of the 13th International Conference on Mobile and Ubiquitous Systems: Computing Net- working and Services, Hiroshima, Japan, 2016: 66-71.
[38] 王佩月, 左志平, 孙跃, 等. 基于双侧LCC的全双工无线电能传输能量信号并行传输系统[J]. 电工技术学报, 2021, 36(23): 4981-4991.
Wang Peiyue, Zuo Zhiping, Sun Yue, et al. Full- duplex simultaneous wireless power and data transfer system based on double-sided LCC topology[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4981-4991.
AGV and UAV Stepwise Wireless Charging Application Based on Quasi Bidirectional Three-State Collaborative Progressive Method
Abstract In application scenarios such as industrial workshops and logistics warehouses, more and more intelligent robots are being used to perform services, monitoring, and transportation work. Combined with the intelligent characteristics of various inspection robots, this paper proposes a step-by-step wireless charging design method for AGV and UAV based on quasi-bidirectional three-state collaborative scheduling to meet the charging service requirements. The aim is to expand the charging domain, energy transmission flexibility, and convenience of the entire system. Compared to traditional fixed static and rail-type dynamic charging devices, this paper introduces the development and design concept of a relay band source system and bidirectional energy transmission. Energy pickup and emission modules are designed and installed at both the input and output ends of mobile AGV and UAV batteries to achieve a three-level step-by-step power supply mode of rail AGV UAV. A mobile power supply is constructed with the networking function of AGV mobile hotspots. According to the power supply demand, the system equipment can choose its power supply role or power intake role to achieve three quasi-bidirectional energy supply modes of the system. At the same time, based on the stability of the electrical parameters and the reasonable utilization of the transmission coil in a limited number, a comprehensive topology structure and power regulation controller of the system are designed. The effectiveness of the proposed method is verified through experiments.
At present, literature on wireless charging mobile robot devices can be mainly summarized into three aspects: (1) New coupling mechanisms with tolerance range; (2) Parameter tuning and optimization of complex systems; (3) Energy efficiency optimization and frequency tracking for static/dynamic charging. These methods have expanded the effective charging area and improved the output performance of the system. However, the WPT technology scheme adopted for mobile robots mainly adopts a two-coil structure as the mainstream engineering application. Due to the generally fixed charging position, the flexibility and constraints of terminal equipment in the spatial configuration are low, causing the limitations of the charging area. From the perspective of application development, there are still several issues with current wireless charging mobile devices: (1) High device reuse rate; (2) The human-machine charging management is complex; (3) The charging modes between each device are independently enclosed; (4) The charging environment is limited. Therefore, the charging area range of wireless charging mobile devices under limited resources, the flexibility and interoperability of mobile charging devices, and an interaction bridge design between devices need to be addressed.
In summary, the introduction of active relays considers each relay unit as a relay system, essentially realizing the step-by-step transmission of energy. The relay system is not only an energy transmission medium but also a superposition state of energy, which can be transmitted or received. The implementation of bidirectional charging can broaden system charging dimensions and improve power distribution flexibility. Therefore, this paper combines the active relay system and bidirectional transmission to achieve multimodal charging.
Keywords:Wireless charging, collaborative scheduling, quasi bidirectional multimodal, progressive AGV/ UAV wireless charging application
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.231761
国家自然科学基金项目(52307004)、重庆市博士“直通车”科研项目(s1202100000306)和中国博士后科学基金第74批面上项目(地区专项支持计划)(2023MD744133)资助。
收稿日期 2023-10-22
改稿日期 2023-12-08
蒋金橙 男,1993年生,博士,讲师,研究生导师,研究方向为电力电子、嵌入式系统及无线电能传输技术。
E-mail: jiangjinc@cqupt.edu.cn
王佩月 男,1992年生,博士,讲师,研究方向为电力电子及无线电能传输技术。
E-mail: wangpy@cqupt.edu.cn(通信作者)
(编辑 陈 诚)