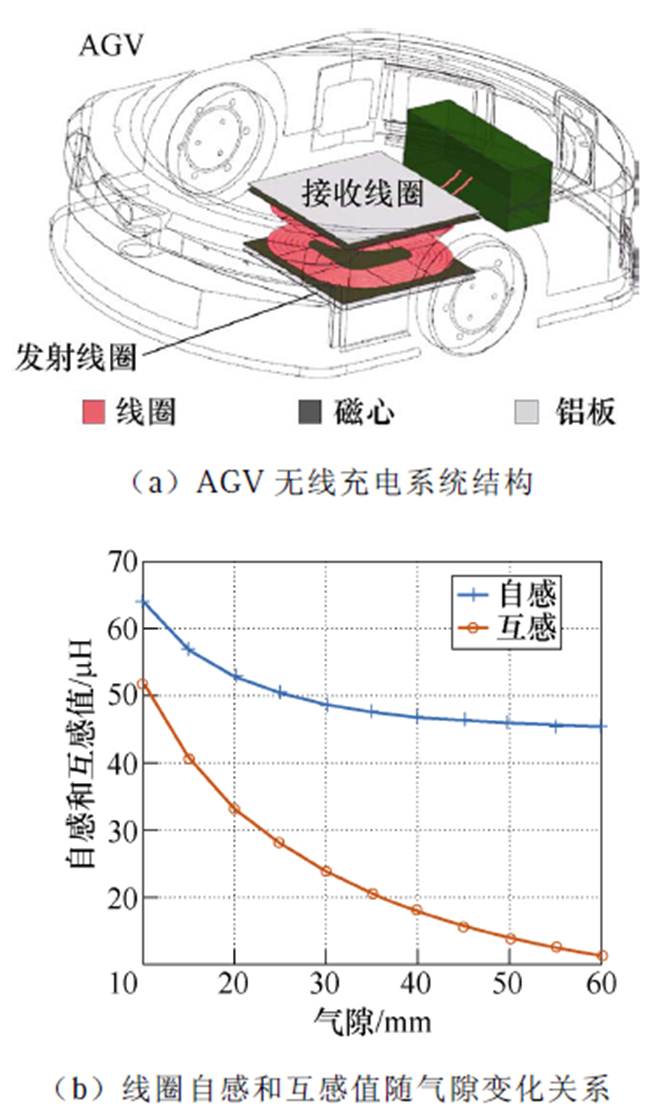
图1 AGV无线充电系统结构及参数变化
Fig.1 Topology parameter variations in AGV WPT system
摘要 在磁耦合无线电能传输(MC-WPT)系统中,由于磁性材料和金属材料的存在,气隙变化会导致线圈自感和互感发生变化,这在小气隙应用中尤为明显。该文提出一种考虑线圈参数和负载变化的宽耦合范围零电压软开关(ZVS)实现方法。该方法使用移相调制(PSM)实现了系统的恒流/恒压(CC/CV)输出。通过优化线圈结构和补偿参数,自感变化转变为有利的可变输入阻抗,从而显著地拓宽了ZVS运行范围。同时,系统无功电流降到最小。为了验证所提方法的有效性,搭建一套250 W的实验装置,实验结果表明,在气隙变化范围10~60 mm,最大自感变化范围32.88~23.84 mH,最大互感变化范围19.13~6.05 mH内,系统实现了最小无功电流下的宽耦合范围ZVS运行,且具备CC/CV输出特性,峰值效率达到92.5%。
关键词:磁耦合无线电能传输 零电压软开关 恒流/恒压输出 宽耦合范围
磁耦合无线电能传输(Magnetic Coupling Wireless Power Transfer, MC-WPT)技术因具有安全性高、灵活性好等优势,近年来受到了国内外学者的广泛关注。目前,该技术已经推广到电动汽车、自动导引车(Automatic Guided Vehicle, AGV)、消费电子等领域[1-5],并逐渐趋于成熟。
在MC-WPT系统中,传输距离是衡量其系统性能的关键因素之一。然而,在实际应用中,耦合线圈之间的气隙往往是不固定的。例如,电动汽车底盘高度会受载质量和胎压的影响而发生变化[6];由于弹簧形变和负载质量的不同,AGV底盘高度也是不固定的[7]。一般来说,耦合距离变化会导致互感变化,从而影响输出功率和效率。同时,在工程应用中,为了增强耦合和电磁屏蔽,磁耦合机构中往往要加入铁氧体磁心和铝板等屏蔽材料,这就导致耦合距离变化也会影响线圈自感。而自感变化会引起系统失谐和输入阻抗变化,导致逆变器零电压软开关(Zero Voltage Switching, ZVS)难以实现,从而影响输出功率和系统效率。此外,由于AGV无线充电系统一般均为电池充电,因此需要系统具备与负载解耦的恒流(Constant Current, CC)/恒压(Constant Voltage, CV)输出特性。
目前,已有大量文献研究了由于互感变化引起的输出功率波动问题,其解决方法可大致分为三类:耦合机构设计[8]、补偿网络优化[9]和控制策略提 升[10]。移相调制(Phase Shift Modulation, PSM)是一种无需任何附加电路就能实现输出功率控制的方法,可以有效减小系统体积和成本。然而,这种方法控制范围受限,在移相角过大时存在硬开关风险。为了拓宽PSM的ZVS运行范围,文献[11]通过引入辅助可变电感提供可变的输入阻抗,实现了串联-串联(Series-Series, SS)补偿WPT系统宽范围内所有开关器件的ZVS运行。文献[12]基于电感-电容-电容-串联(Inductor-Capacitor-Capacitor-Series, LCC-S)补偿拓扑,提出了一种PSM和开关控制电容的混合控制策略,实现了宽输出电压范围内的ZVS运行和无功电流最小化。然而,这些方法引入了额外的元器件和控制变量,使系统控制变得复杂。此外,这些文献并没有考虑自感变化问题。
文献[12-21]注意到了线圈自感变化问题并尝试去解决。该方法主要分为以下三类:
(1)耦合机构设计。文献[13]利用铁磁性材料和金属材料对线圈自感的相反作用规律,提出了一种自感与气隙无关的耦合机构。然而该方法仅实现了发射或接收线圈单侧自感恒定,同时存在铝板中涡流过大的问题。文献[14]比较了相同规格下的不同线圈结构,发现圆形线圈自感受气隙变化影响最小,并给出了考虑自感变化的LCC-S和LCC-LCC补偿拓扑设计建议。但其并未从根本上解决自感变化问题。
(2)频率调谐控制。文献[15]利用脉冲宽度调制(Pulse Width Modulation, PWM)控制开关电容(Switch Capacitor, SC)实现了LCC补偿拓扑的自调谐,但其仅解决了发射侧的自感变化问题。为此,文献[16]在发射端和接收端均加入SC,并基于自感和互感参数识别方法实现了系统双侧自调谐。然而,其参数识别过程较为复杂,并不适用于耦合参数实时变化的场景。为解决这一问题,文献[17]提出了无需参数识别的自调谐方法,但仍需要通信模块来实现信息交互。进一步地,文献[18]提出了无需通信的自调谐方法,简化了系统控制,提升了阶跃扰动响应速度。然而,频率调谐控制必须引入新的元器件和控制变量,这使系统控制变得复杂。
(3)补偿网络和参数优化。文献[19]提出了基于粒子群优化算法的SS补偿拓扑参数设计方法,实现了线圈参数变化下的稳定输出,但仅限于负载恒定的情况。文献[20]基于T/S补偿拓扑提出了考虑线圈自感、互感和负载变化的参数设计方法,实现了AGV动态无线充电系统的恒定输出。然而,该方法仅实现了CC输出,并未考虑效率提升和无功元件的成本。为此,文献[21]基于统一的数学模型和第二代非支配排序遗传算法(Non-dominated Sorting Genetic Algorithm Ⅱ, NSGA-Ⅱ),在CC或CV输出的同时,实现了效率提升和成本降低。但由于文献[19-21]采用开环控制,其恒定输出能力有限,同时文献[21]中的CC或CV输出在两个不同拓扑中实现,这限制了其应用范围。文献[22]提出了一种小气隙变参数WPT系统的效率提升方法,实现了CC输出和效率优化。但其并未实现CV输出,且分析方法尚未考虑高次谐波的影响。
为此,本文基于考虑谐波的时域模型,分析了线圈参数(自感和互感)及负载变化对系统ZVS运行的影响规律,并基于此提出了宽耦合范围ZVS实现方法。利用PSM实现了CC/CV输出,通过耦合机构和参数优化设计拓展了ZVS运行范围,同时实现无功电流最小化,从而提升了系统效率。相比现有控制方法,本文不仅考虑了自感变化问题,而且将其合理利用,解决了传统宽耦合范围移相调制中ZVS难以实现的问题,为线圈参数和负载变化的WPT系统提供了设计思路。
本文选取AGV无线充电系统为例,其结构如图1a所示。发射线圈水平放置于地面上,接收线圈安装在AGV底部。发射和接收线圈完全相同,尺寸均为200 mm×200 mm×3 mm,由线径为3 mm的利兹线绕制10匝而成。为了减少电磁泄露并增强耦合,线圈两侧加入铁氧体磁心和铝板,其尺寸均为200 mm×200 mm×2 mm。在实际应用中,AGV拥有良好的循迹能力,其横向定位精度能够达到mm级,然而,其底盘高度承载质量影响较大,典型值为几十毫米[23]。本文选取无线充电耦合机构气隙变化范围为10~60 mm,不考虑线圈的横向偏移。借助有限元分析软件COMSOL,得到了线圈自感和互感参数随气隙变化曲线如图1b所示。
图1 AGV无线充电系统结构及参数变化
Fig.1 Topology parameter variations in AGV WPT system
如图1所示,当充电气隙逐渐增大时,线圈自感与互感逐渐减小,在小气隙下参数变化尤为明显。当气隙增加到一定值时,自感趋于稳定,而互感仍在下降,这是由于磁心和铝板的交叉耦合影响,在小气隙下发射侧和接收侧的磁心和铝板会影响对方的自感值。因此,在系统建模和分析过程中考虑自感和互感的宽范围变化是十分必要的。
如图2所示为带PSM控制的LCC-S补偿系统电路,输出电压UL和输出电流IL由检测电路获取后通过2.4 GHz射频的方式发送到原边,由PI控制器控制逆变器移相角进行输出功率调节。图中,Udc为直流输入电压,LP、LS和M分别为原、副边线圈自感和互感,CT、CP和CS为补偿电容,RL为负载电阻,RT、RP和RS为线圈等效串联电阻(Equivalent Series Resistance, ESR),IP和IS分别为发射线圈和接收线圈电流的方均根值。MOSFET Q1~Q4组成全桥逆变器,肖特基二极管VD1~VD4和滤波电容Cd组成整流器。
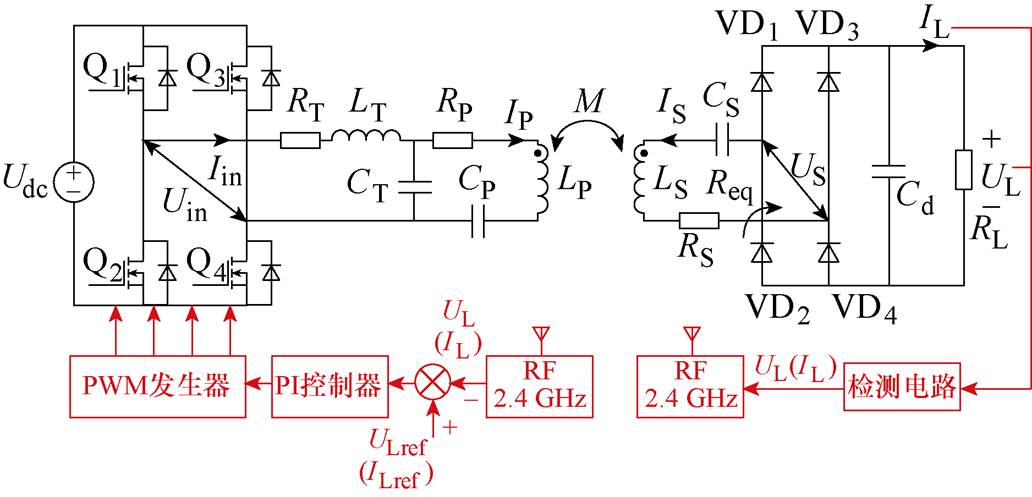
图2 基于LCC-S补偿拓扑的PSM控制系统电路
Fig.2 System circuit diagram based on LCC-S compensation topology with PSM
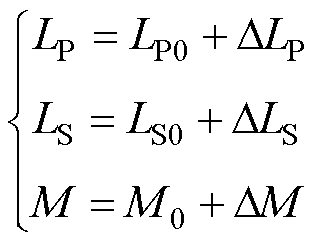
在实际系统中,线圈ESR通常很小,为简化分析可以将其忽略,由此得到如图3所示的等效电路。其中,自感LP、LS和互感M均为变量,可表示为

 (1)
(1)
式中,LP0、LS0、M0为初始值;DLP、DLS、DM分别为其变化量。CT、CP和CS满足
 (2)
(2)
式中,w 为系统工作角频率。Req为等效负载电阻,表示为
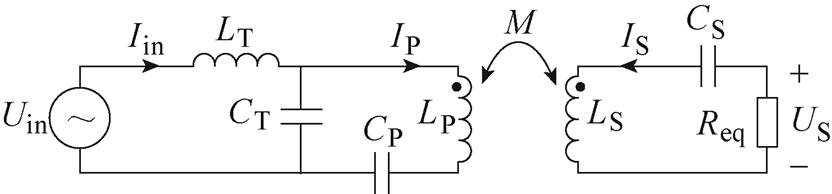
图3 等效电路
Fig.3 Equivalent circuit
 (3)
(3)
根据基波近似分析,逆变器输出电压Uin及整流器输入电压US和电流IS可分别表示为
 (4)
(4)
 (5)
(5)
 (6)
(6)
式中,a 为逆变器导通角。
副边阻抗为
 (7)
(7)
副边到原边反射阻抗为
 (8)
(8)
LP回路等效阻抗及其阻抗角分别为
 (9)
(9)
 (10)
(10)
在LCC补偿拓扑中,根据KVL和式(2)可得发射线圈电流为
 (11)
(11)
所以,等效输出电压和电流可分别表示为
 (12)
(12)
 (13)
(13)
(1)CC输出模式:保持IL恒定,联立式(4)、式(6)、式(11)和式(13)可得导通角aCC为
 (14)
(14)
(2)CV输出模式:保持UL恒定,联立式(4)、式(5)、式(11)和式(12)可得导通角aCV为
 (15)
(15)
为了得到系统ZVS运行条件,利用考虑谐波的时域模型推导了iin(t)的表达式。图4所示为LCC补偿拓扑的时域模型等效电路。
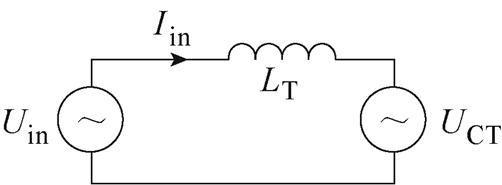
图4 LCC补偿拓扑的时域模型等效电路
Fig.4 Time domain model equivalent circuit of LCC compensated topology
由于LC滤波网络的存在,发射线圈电流iP(t)基本为正弦波。根据式(4)和式(11)可得
 (16)
(16)
因此,CT两端电压为
 (17)
(17)
PSM控制的LCC补偿系统逆变器输出电压电流波形如图5所示,可以看到其波形是分段的,选取逆变器输出基波电压的过零点作为起始点,可得各关键点iin(t)表达式[24]为
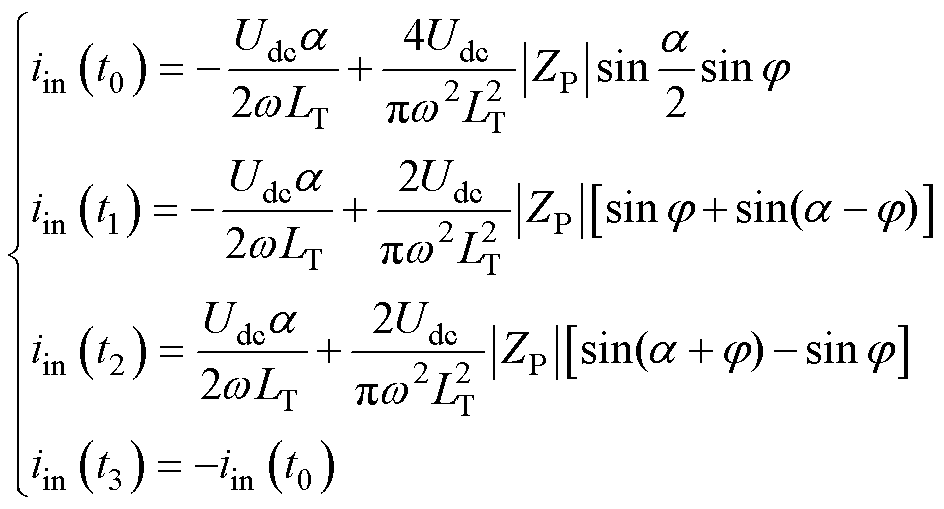 (18)
(18)
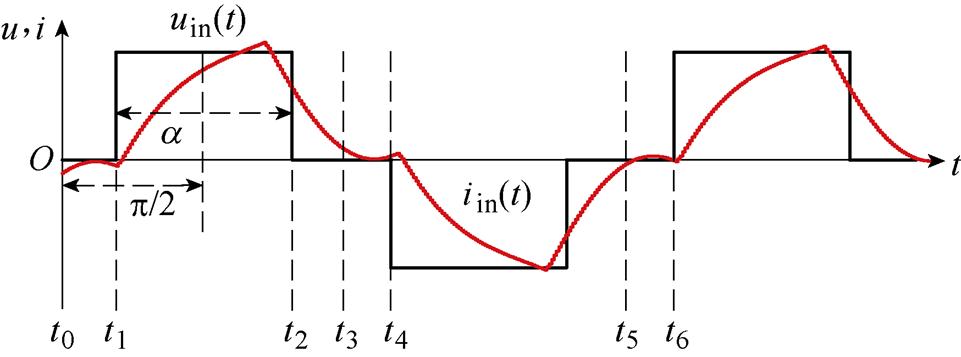
图5 逆变器输出电压电流波形
Fig.5 Output voltage and current waveforms of inverter
系统ZVS运行的关键是在死区时间内对所有MOSFET的结电容完成放电,即
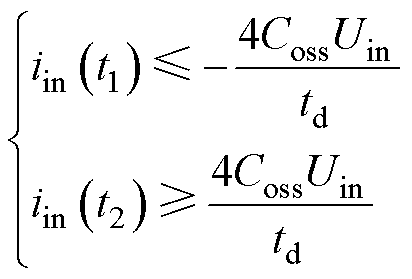 (19)
(19)
式中,Coss为MOSFET的结电容;td为死区时间。本文选取MOSFET型号为SH1Q12080T3,根据数据手册得到Coss=195 pF,结合Uin=200 V,td=312 ns,同时考虑到无源元件内阻及参数漂移的影响,系统ZVS运行条件留有10%的设计裕量。结合式(18)可得iin(t1)+iin(t2)>0,故式(19)可被简化为
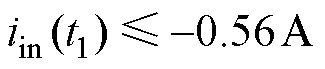 (20)
(20)
式(20)即可作为ZVS临界条件。
本文使用控制变量法研究线圈参数变化对系统ZVS运行的影响。选取一组参数进行研究见表1,令DM=0,根据式(18)、式(19)可得DLP和DLS对iin(t1)的影响如图6所示。可以看到,DLP的增加使iin(t1)变大,甚至会大于零;而DLS的增加使iin(t1)变小,这有利于ZVS的实现。
表1 系统参数
Tab.1 System parameters
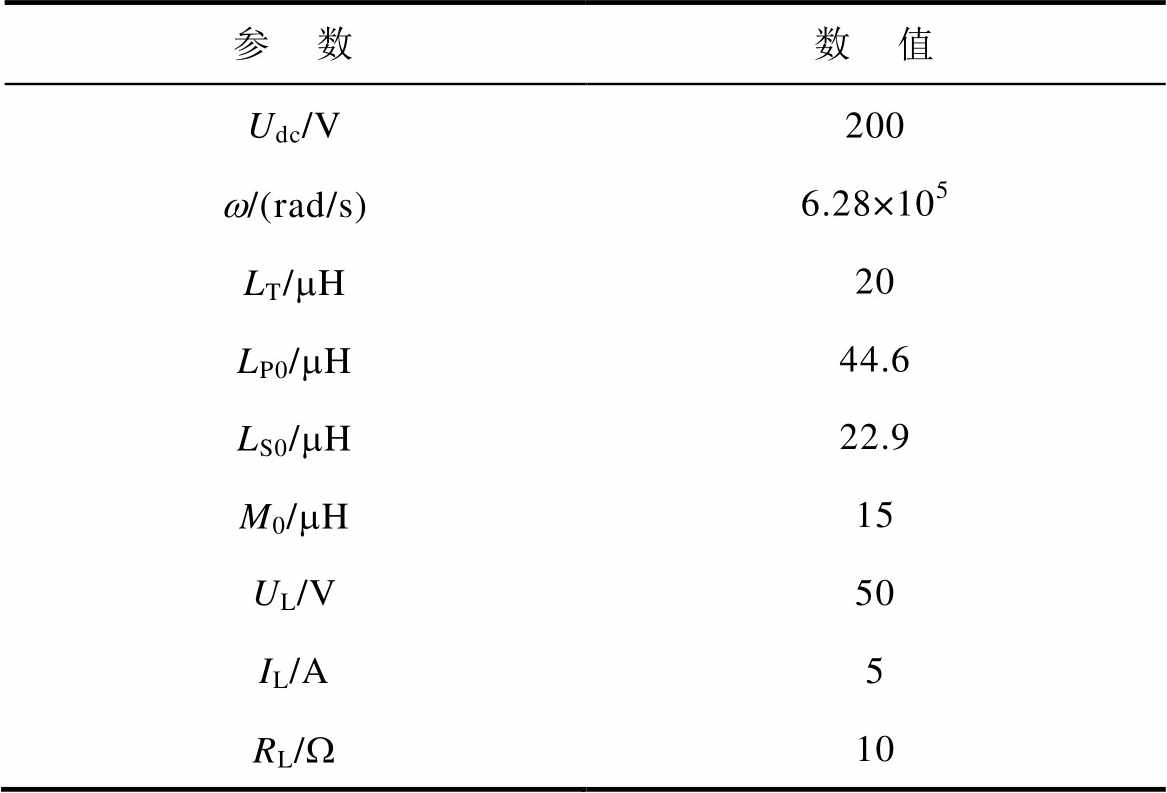
参 数数 值 Udc/V200 w/(rad/s)6.28×105 LT/mH20 LP0/mH44.6 LS0/mH22.9 M0/mH15 UL/V50 IL/A5 RL/W10
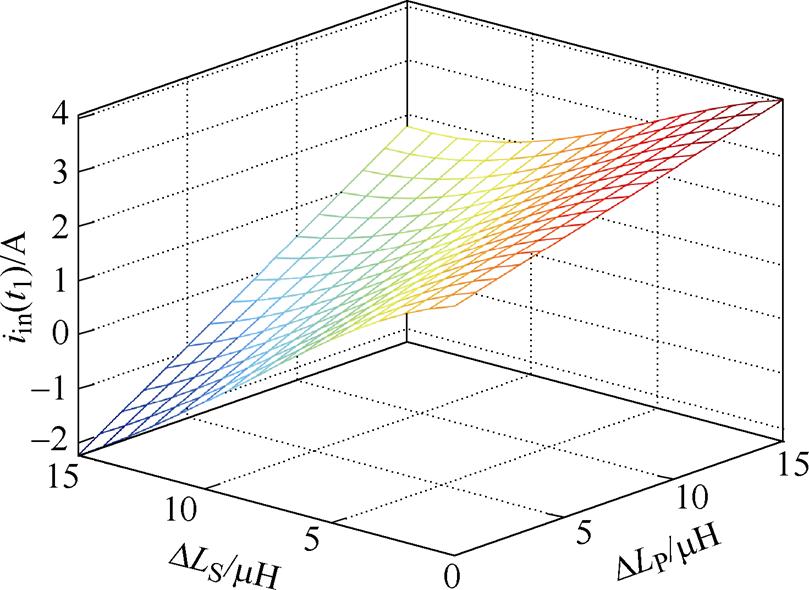
图6 当DM=0时DLP和DLS与iin(t1)的变化关系
Fig.6 The relationship of DLP, DLS and iin(t1) whenDM=0
进一步地,令DLP=DLS=0,得到DM和iin(t1)的关系如图7所示。可以看到,当DM增加时,iin(t1)也增加,这意味着系统向非ZVS运行状态发展。结合图1b,当耦合气隙减小时,DM的增加是不可避免的,这会使iin(t1)变大;但另一方面,根据图6,如果保持DLP=0,并利用DLS的增加能使iin(t1)降低。因此,通过对耦合机构和系统参数的优化设计,可以使iin(t1)保持在一个合理的范围内,这意味着宽范围的ZVS运行和最小无功电流能够同时实现。
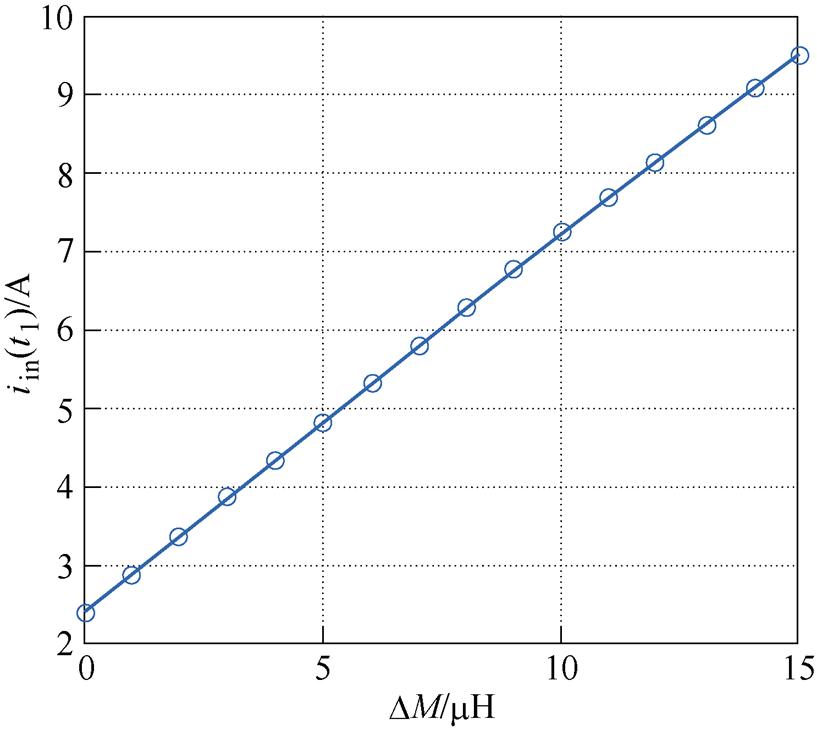
图7 当DLP=DLS=0时DM与iin(t1)的变化关系
Fig.7 The relationship of DM and iin(t1) whenDLP=DLS=0
本文选取电池充电规格为50 V/5 A,其放电截止电压为30 V,根据电池充电过程中等效负载的变化,选择CC模式负载电阻为6~10 W,CV模式负载电阻为10~50 W,可以较好地模拟电池充电过程。当DLP=0,iin(t1)=-0.56 A时,利用Matlab可拟合得到CC和CV输出模式下M、DLS和RL的变化关系如图8所示。图中,曲面即代表了系统ZVS运行的边界,曲面上方为非ZVS区域,曲面下方为ZVS区域。在不同负载电阻下选取曲面最低点可拟合得到全负载范围下的ZVS运行边界轨迹如式(21)所示,这为系统参数设计提供了依据。
 (21)
(21)
根据上述分析,宽耦合范围ZVS实现方法可分为两步:①实现与气隙无关的恒定LP,这一点可以通过耦合机构设计实现;②实现与气隙无关的近似恒定iin(t1),这一点可以通过耦合机构和谐振参数优化设计实现。
根据图1可知,相同的线圈结构无法使LP恒定。因此,本文提出了如图9所示的大发射小接收型磁耦合机构,发射和接收线圈及磁心和铝板均为方形,关键尺寸符号已在图中标注。
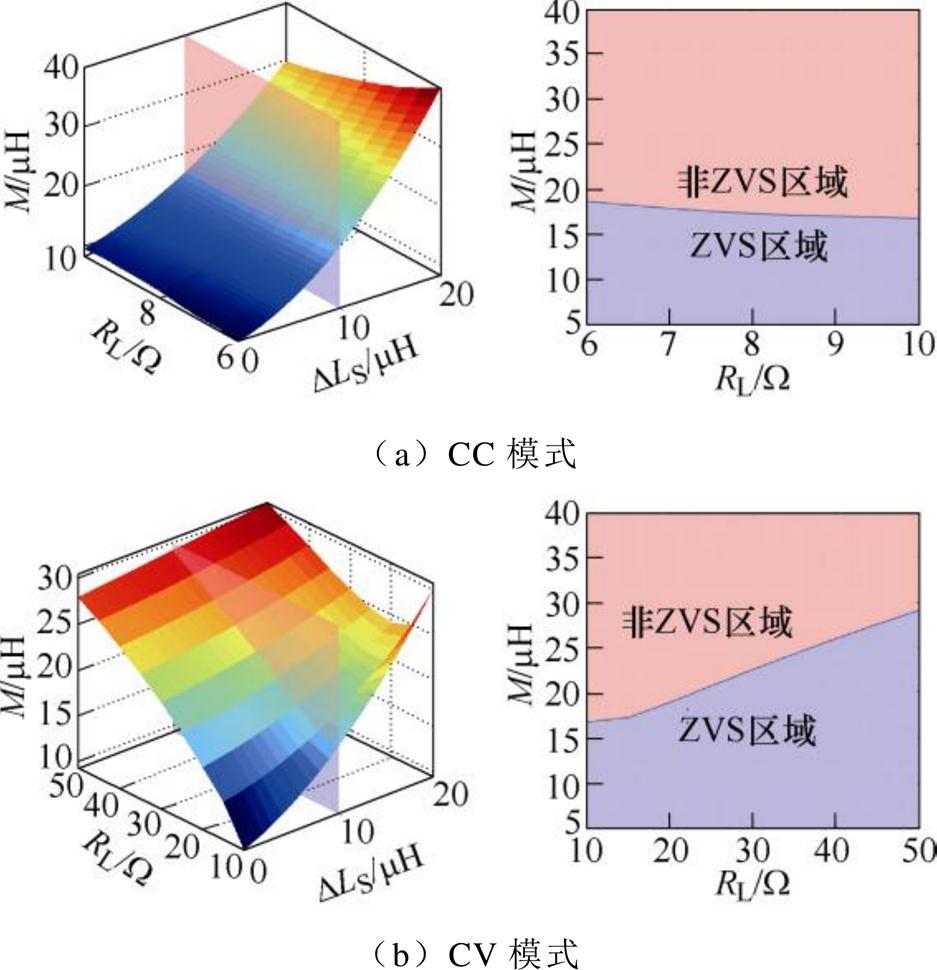
图8 当DLP=0,iin(t1)=-0.56 A时M、DLS和RL的变化关系
Fig.8 The relationship between M, DLS and RL when DLP=0 and iin(t1)=-0.56 A
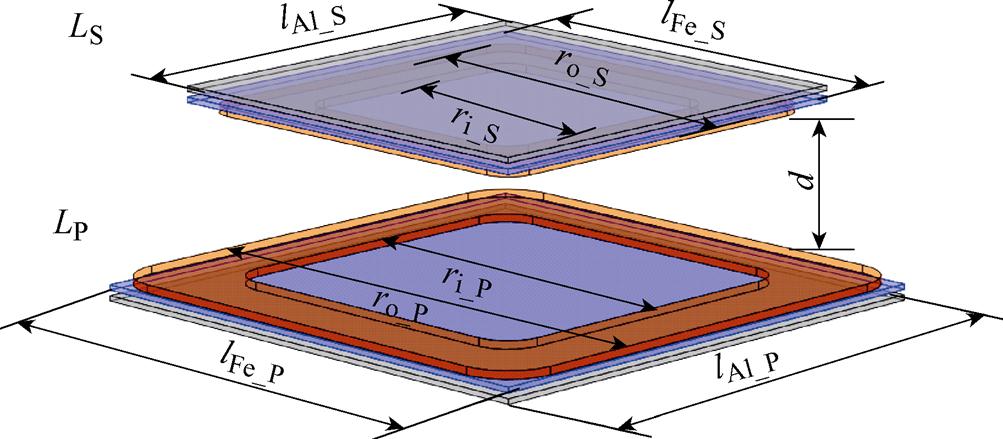
图9 大发射小接收磁耦合机构
Fig.9 The magnetic coupler with large transmitter and small receiver
利用磁心和铝板对线圈自感的相反作用可实现在气隙变化下LP基本恒定。保持发射线圈尺寸不变,改变接收线圈尺寸,利用COMSOL参数化扫描功能可以得到不同接收线圈尺寸下的LP和气隙d的关系如图10所示。这里接收线圈尺寸代表了接收端方形铝板的边长,在实际应用中,为了实现更好的电磁屏蔽效果,接收线圈尺寸要略小于磁心和铝板尺寸,本文选取边长减小量为10 mm。
如图10所示,当接收线圈尺寸过大时,随着d的增加LP逐渐减小;而接收线圈尺寸过小时LP逐渐增大。这是因为当尺寸过大时,磁心对线圈自感的影响更大;反之,铝板的作用更明显。当lAl_S=160 mm时,LP保持基本恒定(变化率小于2.3%),所以接收端尺寸选择为160 mm。
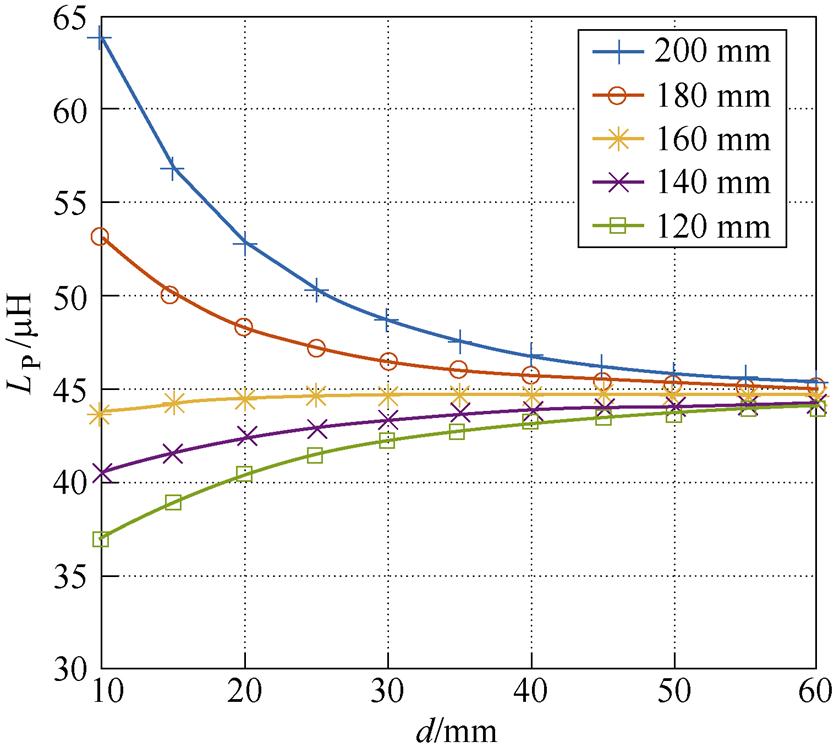
图10 不同接收线圈尺寸下的LP和气隙d的关系
Fig.10 The relationship between LP and air gap d at different receiver sizes
进一步地,研究接收线圈匝数NS对耦合机构参数的影响规律,如图11所示。可以看到,NS不影响LP,仅影响M和DLS以及其关系。结合图8所示的ZVS运行条件可知,可以通过改变NS来调节M和DLS的关系,从而实现宽耦合范围内ZVS运行。
图12将不同NS下M和DLS的关系与ZVS边界轨迹进行了比较。可以看到当NS=10时,曲线位于ZVS边界上方,意味着此时ZVS未能实现;当NS=6时,尽管ZVS可以实现,但由于曲线远离边界轨迹,意味着此时无功电流过大,这不利于系统效率提升。因此,本文选取NS=8,此时既可以实现ZVS运行,又保证了无功电流较小。
基于上述分析,得到耦合机构参数见表2,图13为实际绕制的耦合机构及其实测参数,可以看到,测量结果与仿真结果基本一致。利用Matlab可拟合得到LS和M关于d的变化关系为
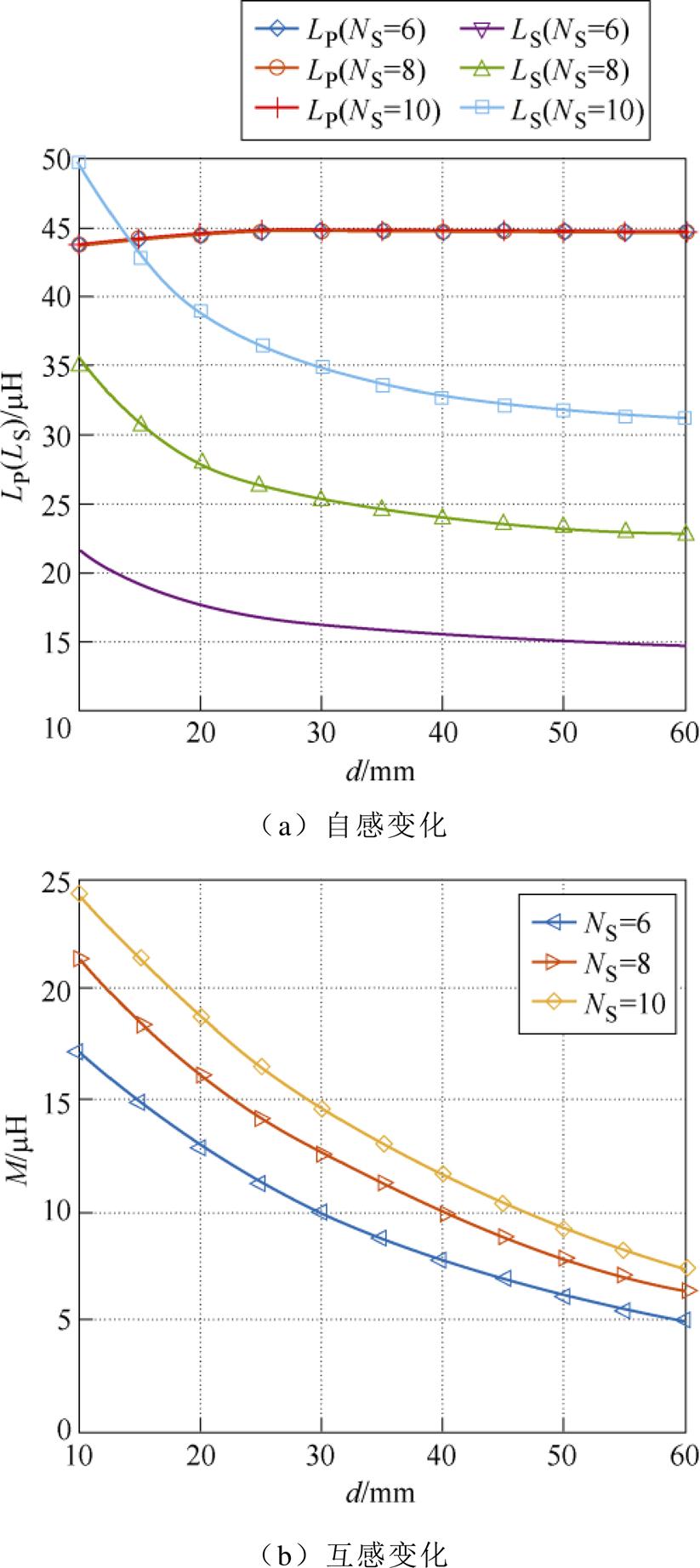
图11 不同接收线圈匝数下的耦合机构自感和互感变化情况
Fig.11 The self- and mutual inductance variation of magnetic coupler at different receiver turns
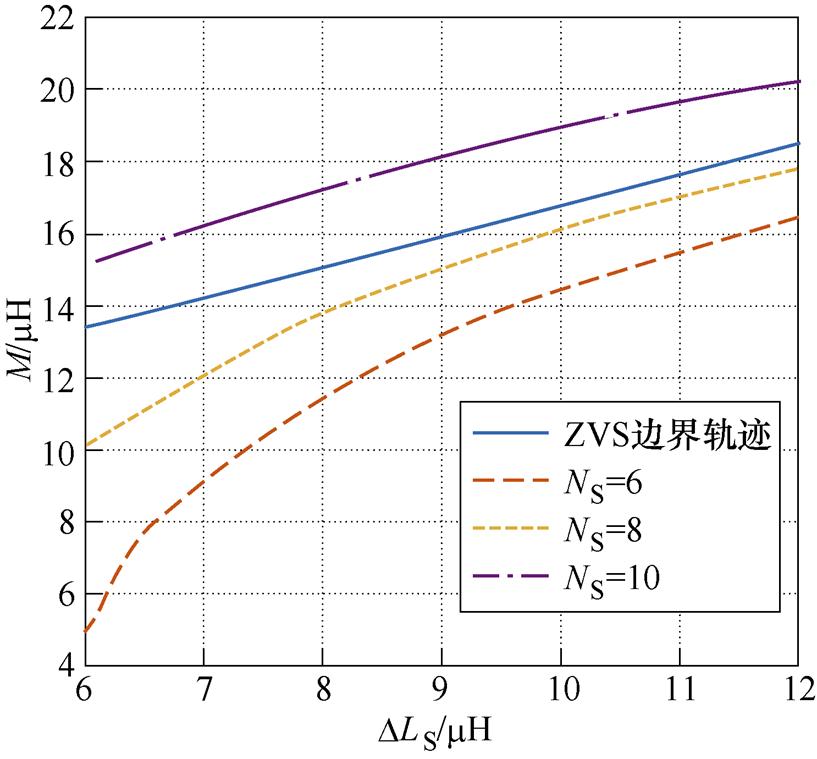
图12 不同NS下M和DLS的关系
Fig.12 The relationship between M and DLSat different NS
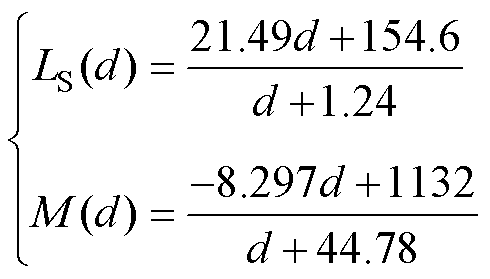 (22)
(22)
耦合机构设计对ZVS运行十分关键,但其并不能保证全耦合范围内的最小无功电流。因此本节将对谐振参数进行优化设计,以实现宽耦合范围内的无功电流最小化,如图14所示为系统参数优化流程。
首先,根据式(20)可以得到ZVS运行的临界条件。同时根据式(18)可知,DLS和M的关系不能被显示表达,因此有必要借助Matlab软件拟合CC和CV模式下的ZVS边界轨迹,这为耦合机构和参数设计提供了依据。
表2 优化后的耦合机构参数
Tab.2 Optimized coupling mechanism parameters
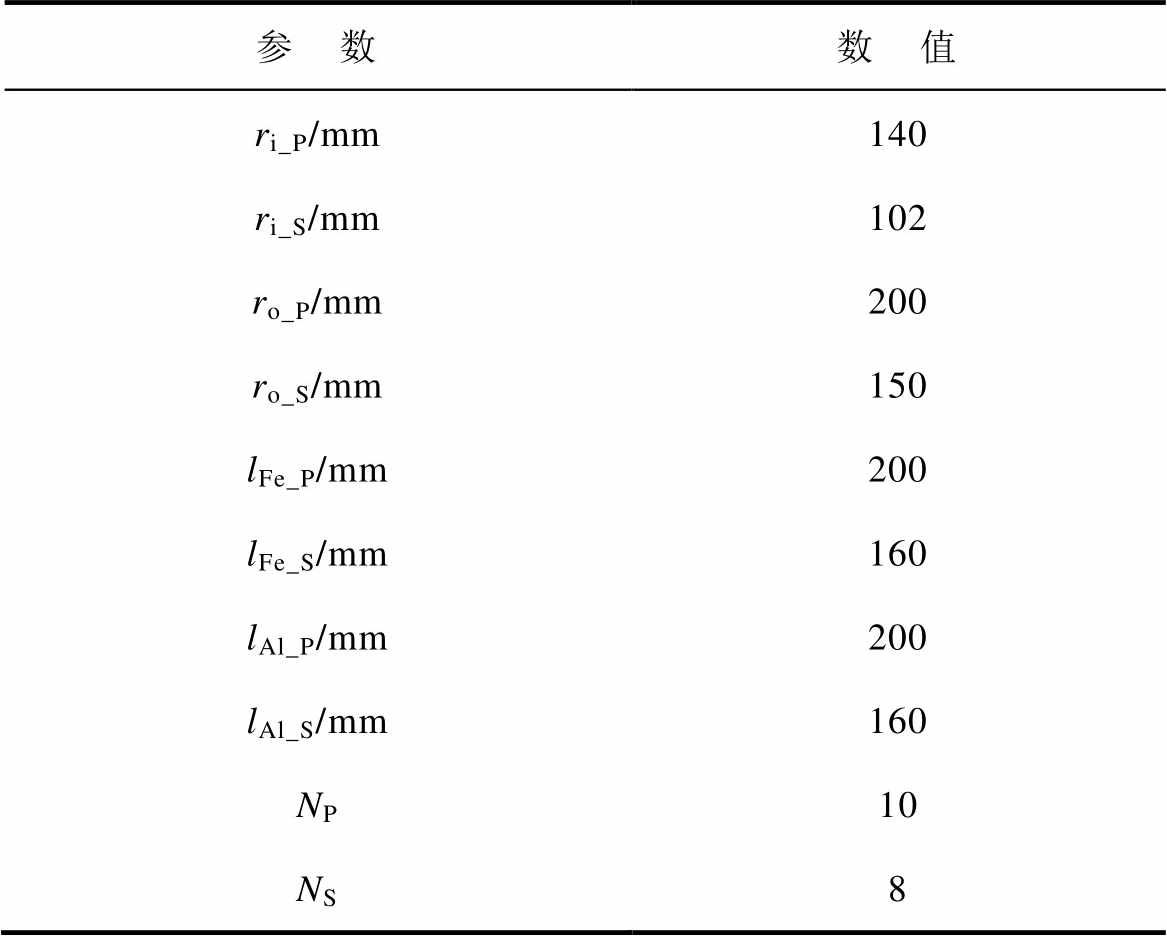
参 数数 值 ri_P/mm140 ri_S/mm102 ro_P/mm200 ro_S/mm150 lFe_P/mm200 lFe_S/mm160 lAl_P/mm200 lAl_S/mm160 NP10 NS8
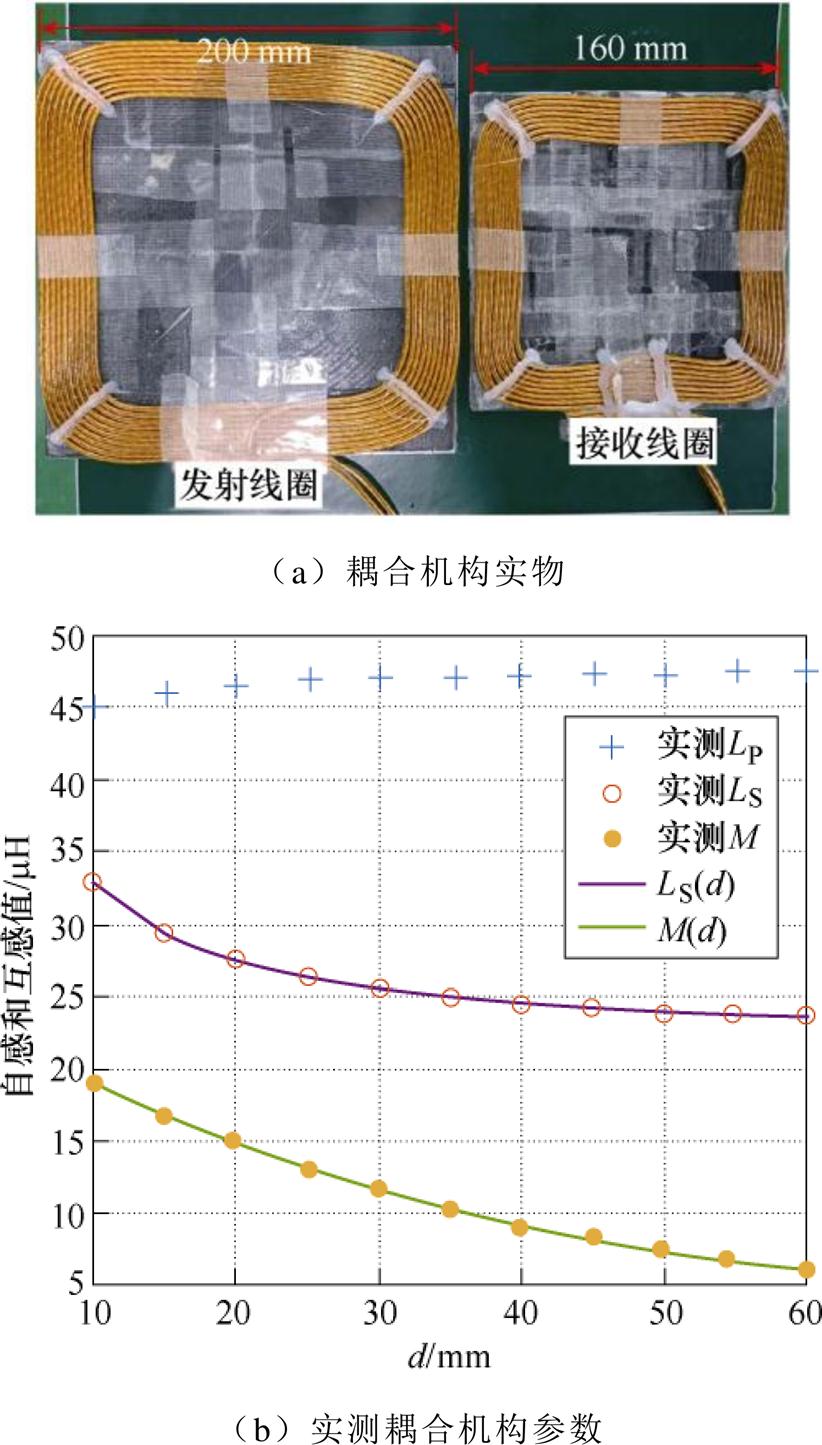
图13 耦合机构实物及其实测参数
Fig.13 The actual diagram of the coupling mechanism and its measured parameters
其次,耦合机构设计包含两个步骤:一是通过调节发射和接收线圈的尺寸获得恒定的LP;二是通过优化接收线圈匝数使耦合机构满足宽耦合范围内的ZVS运行条件。
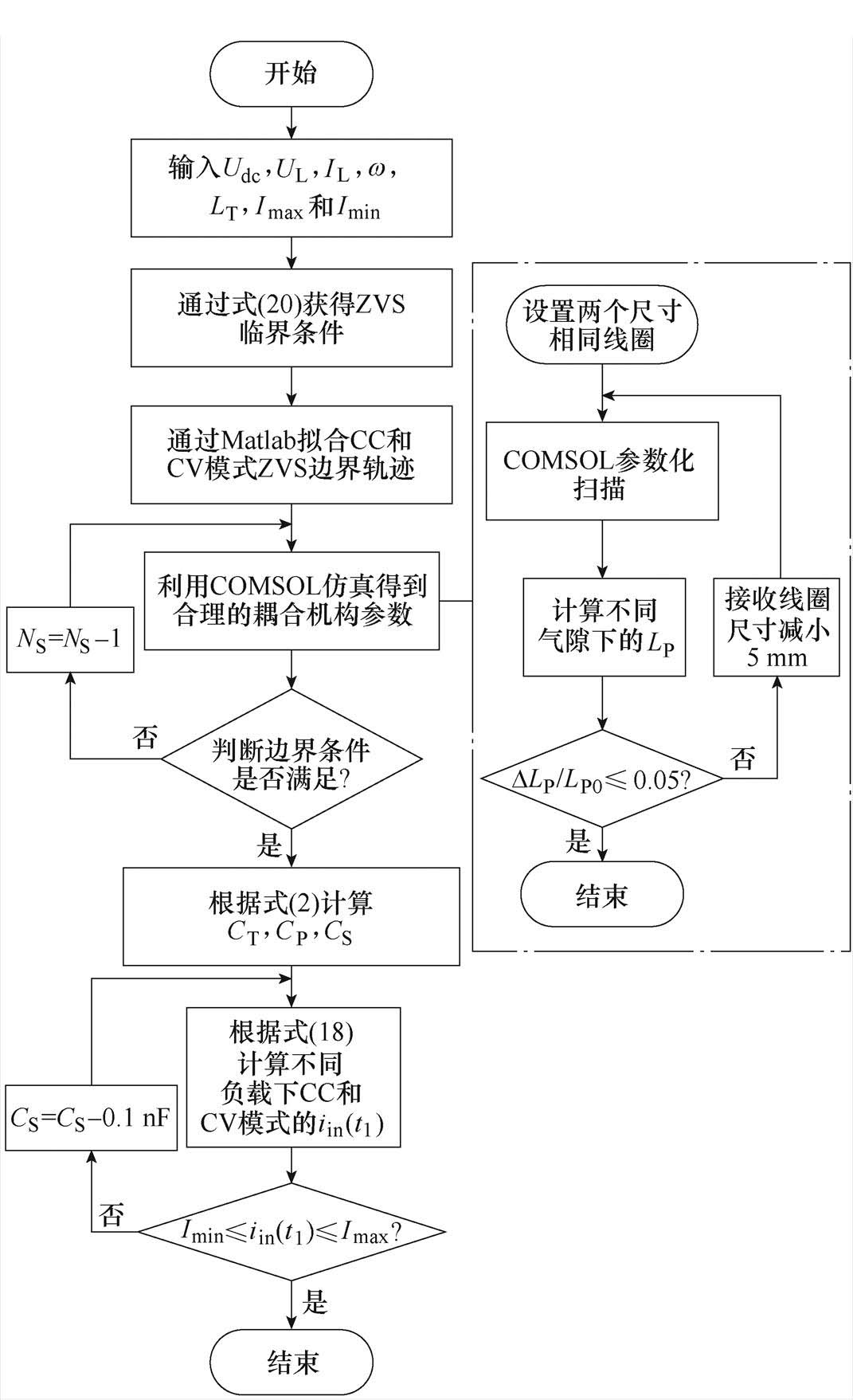
图14 参数优化流程
Fig.14 Parameter optimization flow chart
最后,通过优化谐振电容参数,不同负载下的iin(t1)保持在合理的范围(Imin≤iin(t1)≤Imax)内,因此最小无功电流下的ZVS运行得以实现。由于LP基本恒定(47.5 mH),CT和CP可由式(2)计算,CS优化步长选取为0.1 nF。本文选取的电流变化范围为-3 A≤iin(t1)≤-0.56 A。
基于上述分析,系统参数见表1,优化后的谐振电容取值分别为CT=126.7 nF,CP=92.1 nF,CS= 158.3 nF。如图15所示为参数优化后不同负载下iin(t1)和d的关系,可以看到,CC和CV模式下iin(t1)均保持在设计范围内,表明参数设计的准确性。
为验证所提方法的有效性,搭建了如图16所示的实验装置,实验参数与理论分析保持一致。由LCR电桥测量得到系统补偿电感与电容参数见表3。系统输入功率由直流电源提供,直流电子负载作为系统负载,耦合机构安装在三维运动测试平台上来模拟气隙的变化。原、副边通信采用2.4 GHz,MOSFET型号为SH1Q12080T3,肖特基二极管型号为SL1045DS。
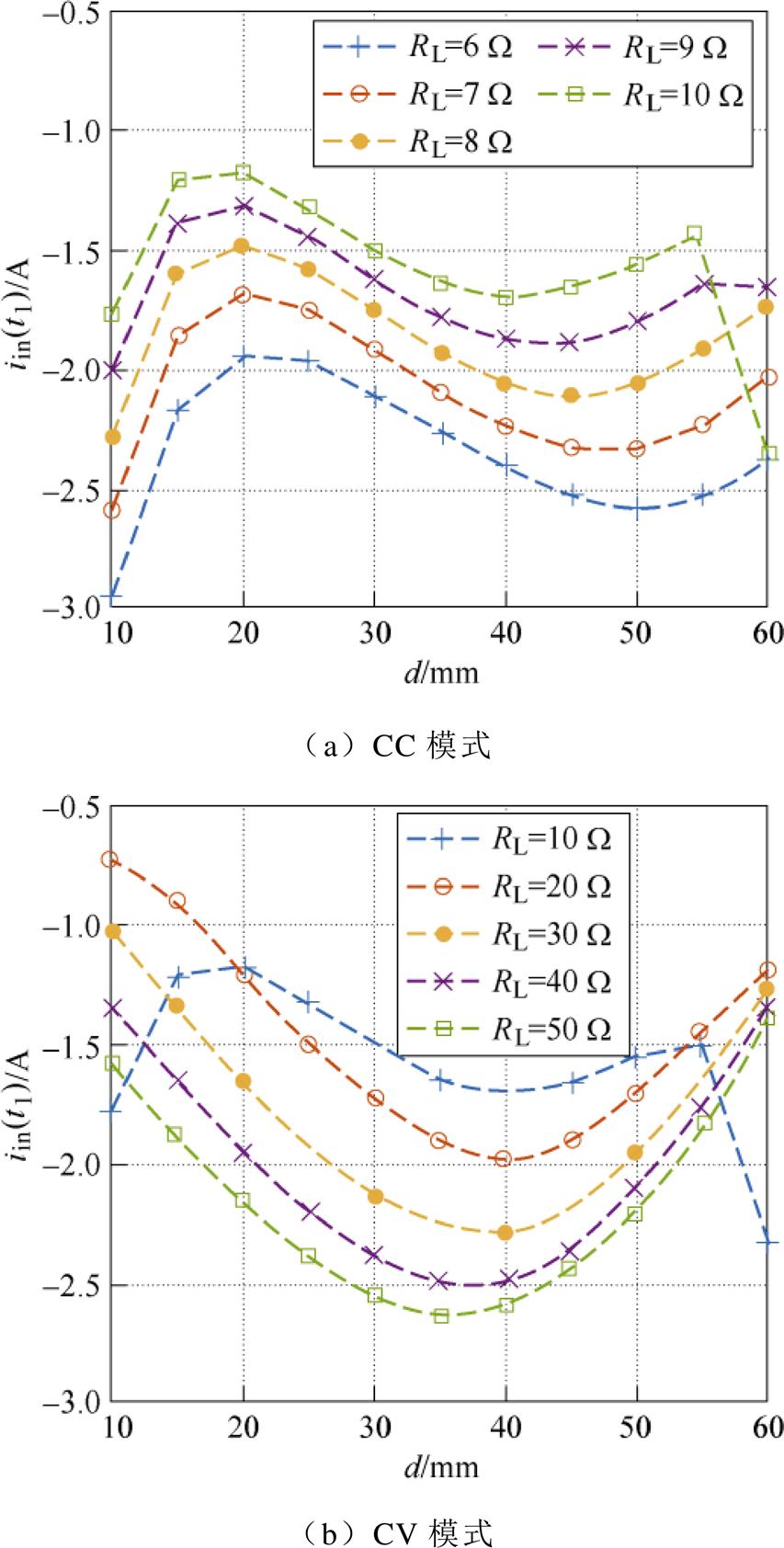
图15 参数优化后不同负载下iin(t1)和d的关系
Fig.15 The relationship between iin(t1) and d at different loads with optimized parameters
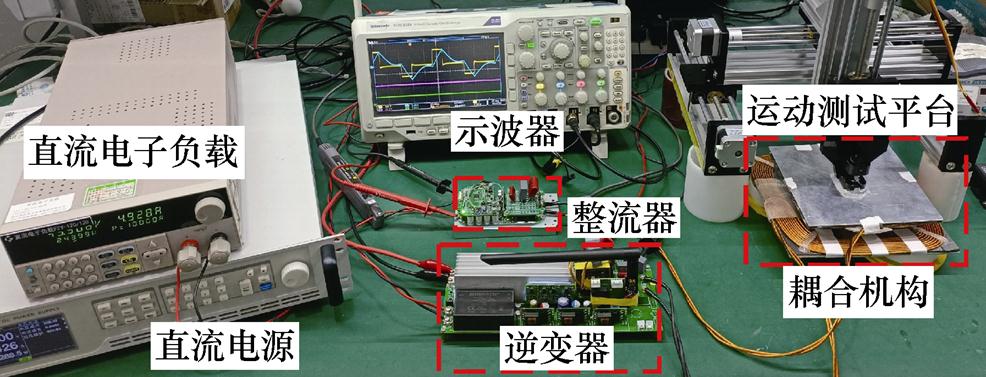
图16 实验装置
Fig.16 Experimental setup
表3 参数实测值
Tab.3 Parameter measurement value

参 数数 值 LT/mH19.9 CT/nF126.9 CP/nF91.7 CS/nF158.2
通过驱动运动测试平台,得到RL=10 W 时不同气隙下原边逆变器输出和副边直流输出电压电流波形如图17所示。可以看到,输出电压和电流在不同气隙下保持恒定(50 V/5 A),同时iin(t1)保持在合理的范围内(-3 A≤iin(t1)≤-0.56 A)。
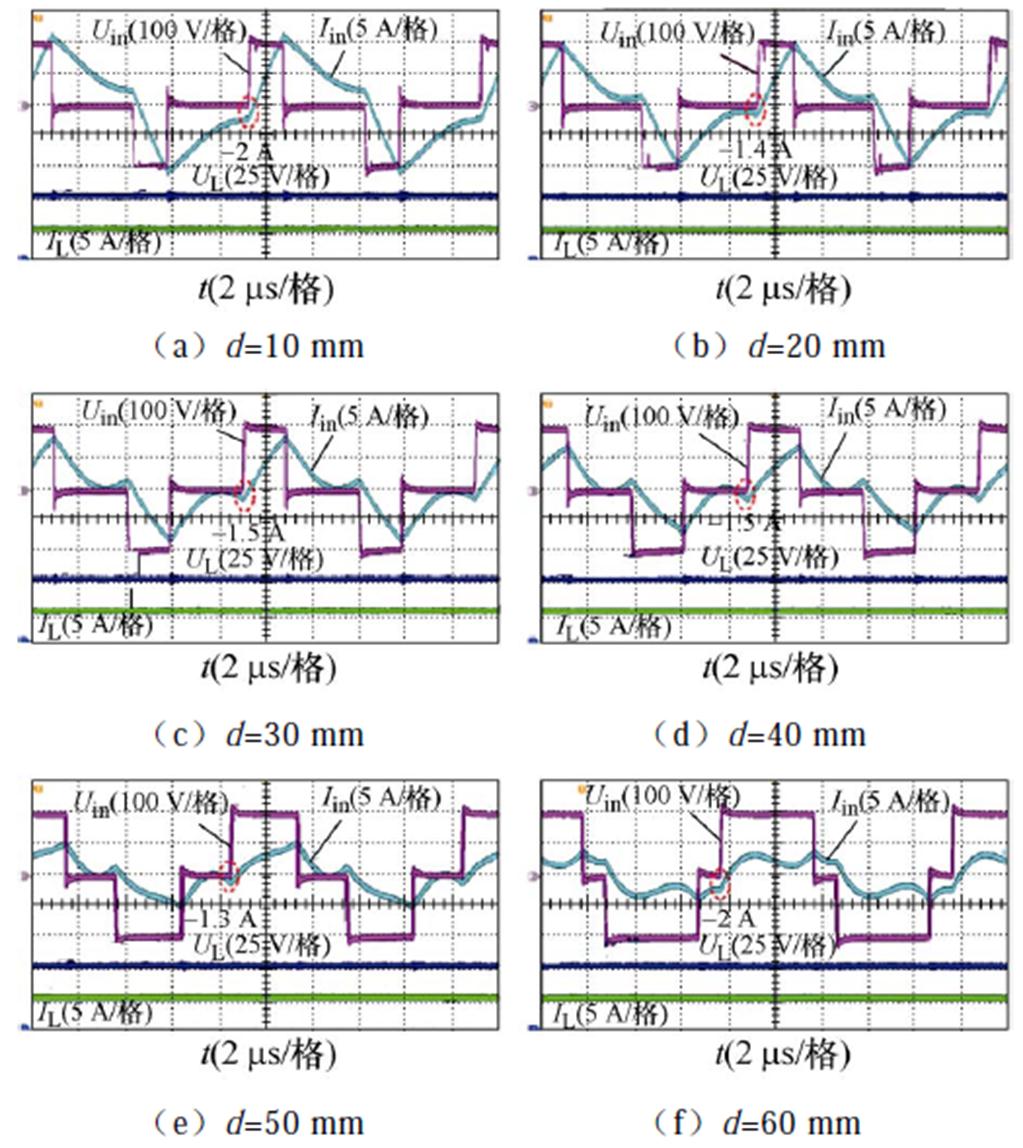
图17 RL=10 W 时不同气隙下原边逆变器输出和副边直流输出电压电流波形
Fig.17 Output voltage and current waveforms of primary inverter and secondary at different air gaps when RL=10 W
为分析逆变器开关管工作状态,在d=30 mm,RL=10 W 时,测得4个MOSFET关键波形如图18所示。可以看到,所有开关管均工作在ZVS状态,这样可显著减少电磁干扰和额外的损耗。
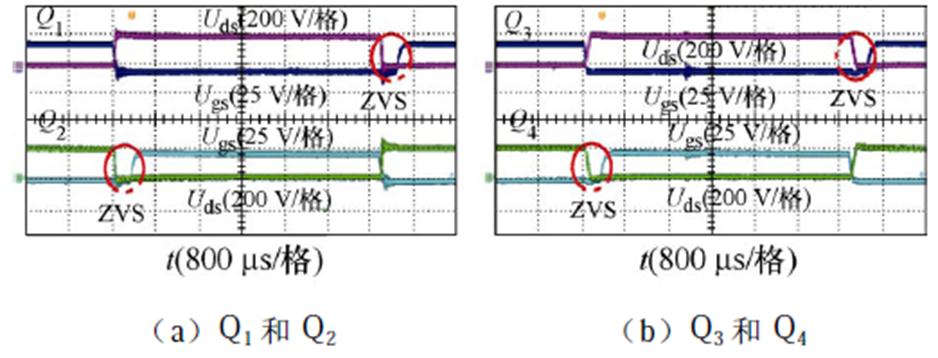
图18 MOSFET实验波形
Fig.18 Experimental waveforms of MOSFETs
图19和图20分别展示了当d=30 mm时,不同负载下CC和CV模式的原副边输出电压、电流波形。可以看到,在CC和CV输出模式下,UL与IL分别保持恒定,且iin(t1)始终在理想的范围内,这意味着系统实现了恒定输出和无功电流最小化ZVS运行。
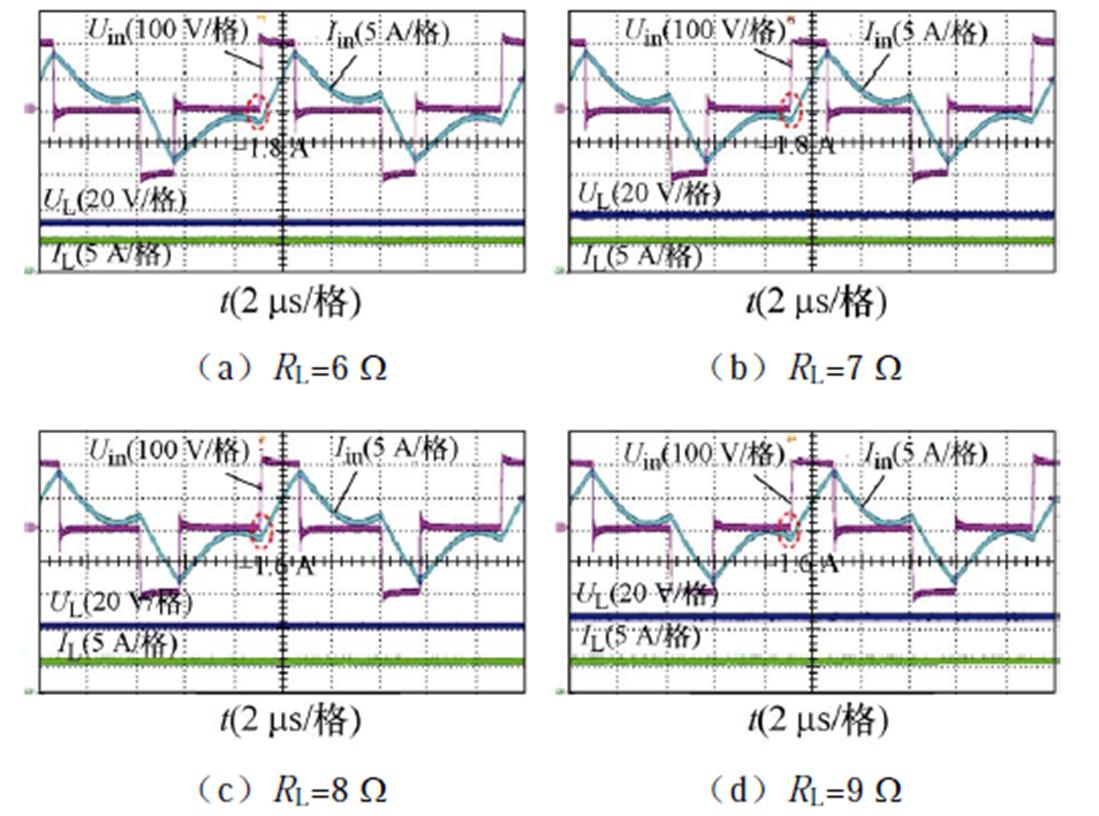
图19 CC模式不同负载下原副边输出电压电流波形
Fig.19 Output voltage and current waveform of primary and secondary side at different RL in CC mode
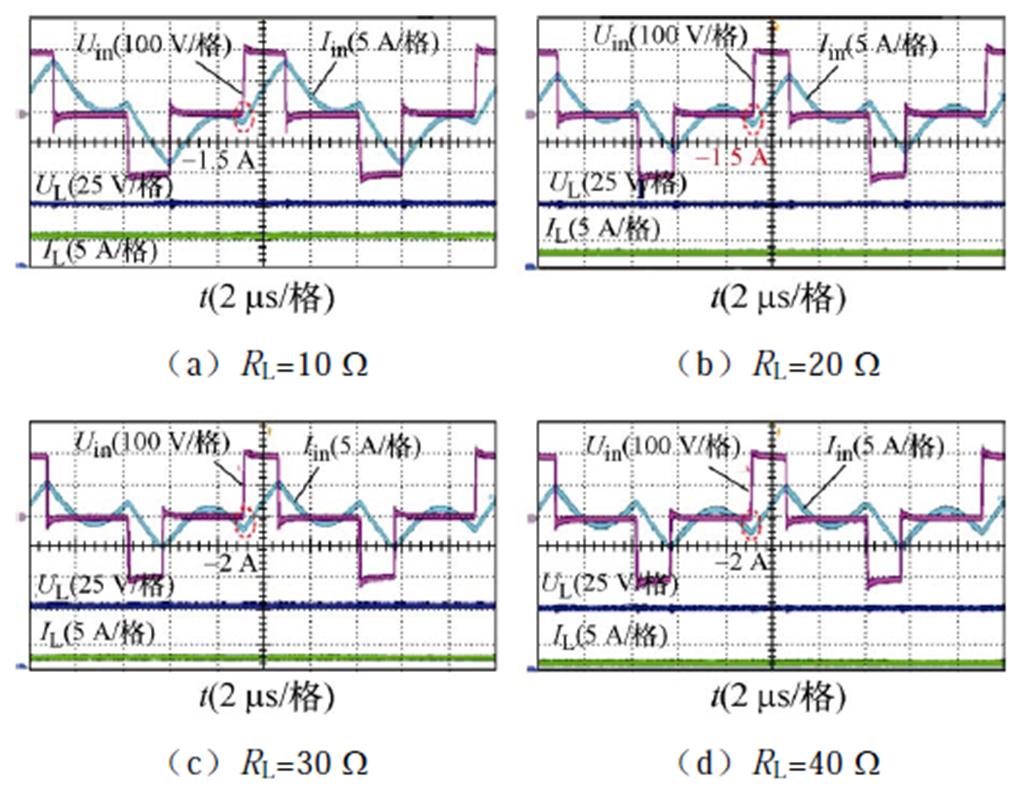
图20 CV模式不同负载下原副边输出电压电流波形
Fig.20 Output voltage and current waveforms of primary and secondary side at different RL in CV mode
CC和CV模式下的系统效率随气隙变化曲线如图21所示。随着气隙增加,系统效率变化趋势与负载相关,重载时先增大后减小,轻载时呈下降趋势;而相同气隙下随着负载电阻的增大,系统效率先增大后减小,当d=20 mm,RL=10 W 时,系统效率最高,达到92.5%。
研究系统的动态性能是十分必要的,具体可分为两种:负载变化和耦合变化。图22显示了CC和CV模式下恒定耦合(d=30 mm)时负载切换波形,可以看到,CC模式下输出电流保持恒定,动态响应时间为200 ms;CV模式下输出电压保持恒定,动态响应时间为50 ms和70 ms,动态性能良好。
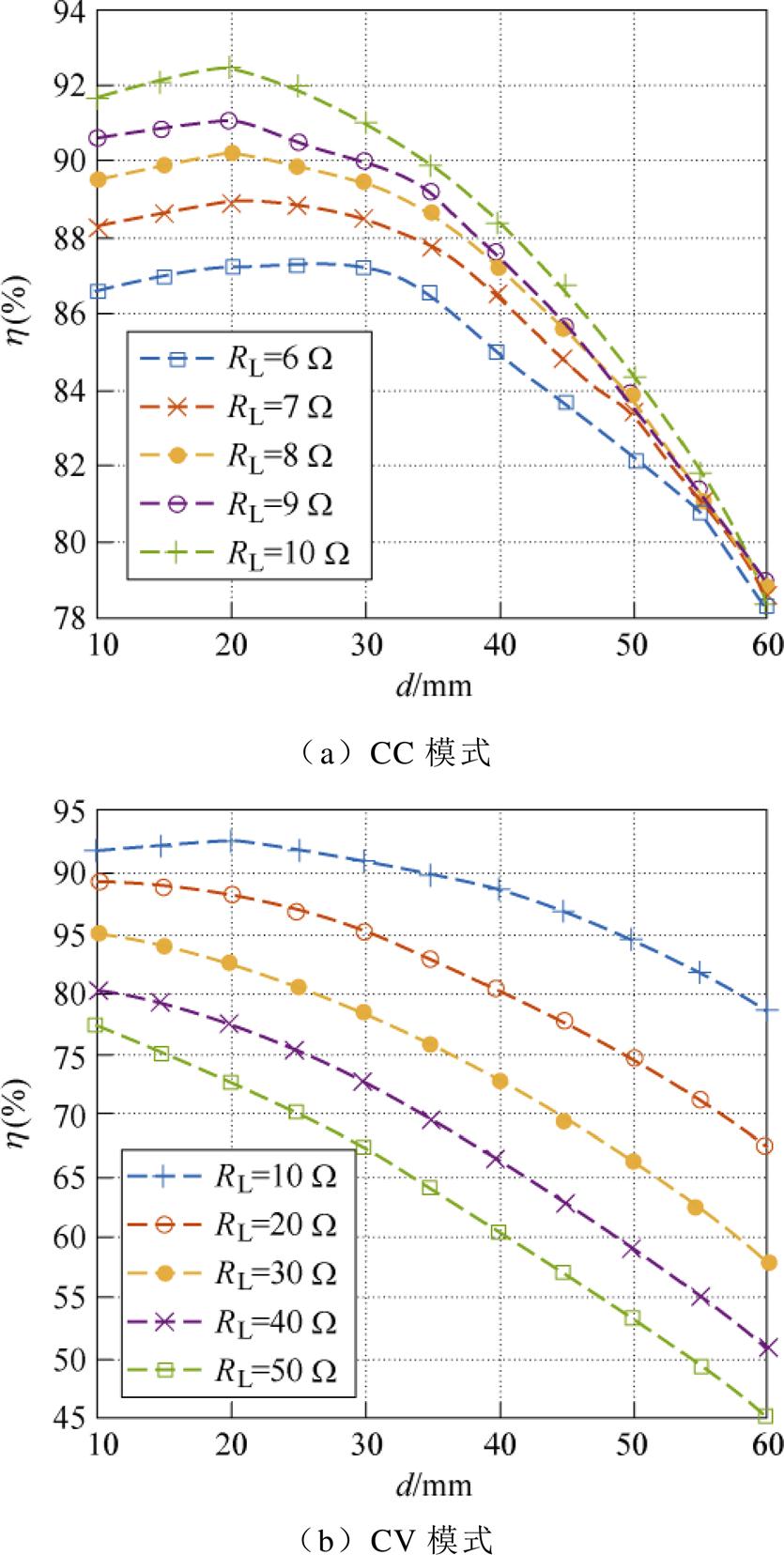
图21 不同负载下系统效率随气隙变化关系
Fig.21 The relationship between system efficiency and air gap with different loads
负载固定(RL=10 W)时不同气隙下系统实验波形如图23所示,可以看到当气隙变化时,输出电压电流保持恒定,动态响应时间为130 ms和110 ms。总之,PSM控制下的WPT系统动态响应速度较快,无明显超调,能够适应耦合和负载实时变化的场景。
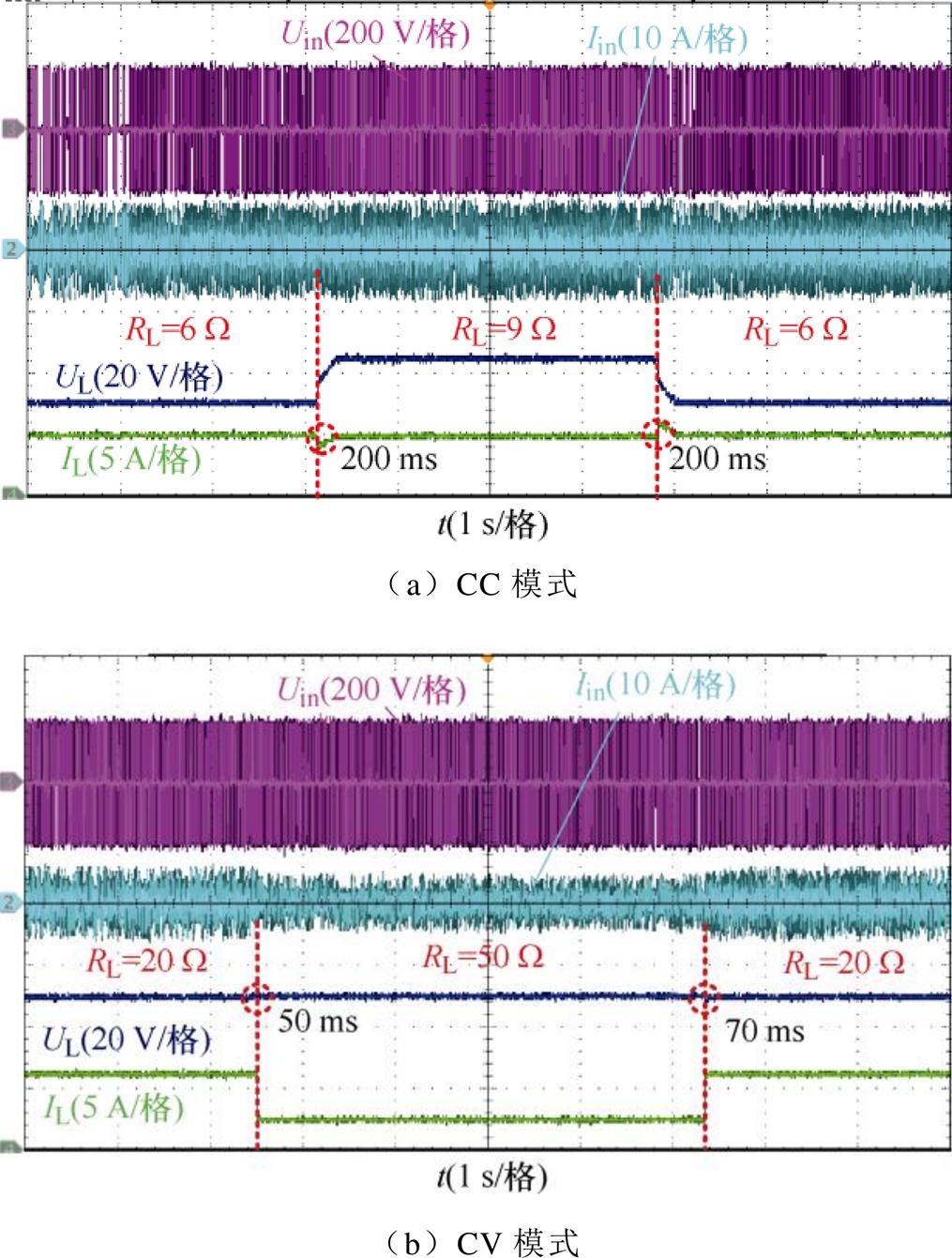
图22 d=30 mm时负载切换下原副边输出电压电流波形
Fig.22 Output voltage and current waveforms of primary and secondary side under load switching when d=30 mm
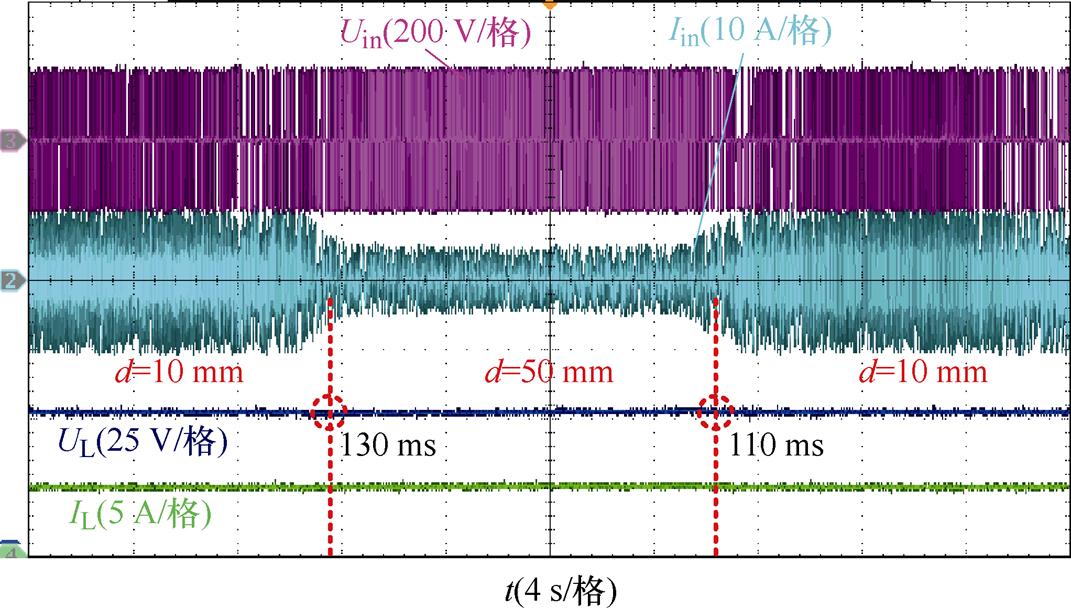
图23 RL=10 W 时不同气隙下原副边输出电压电流波形
Fig.23 Output voltage and current waveforms of primary and secondary side at different air gaps when RL=10 W
表4详细对比了近年来相关的研究成果。文献[11-12]分别引入可变电感和可变电容来拓宽移相控制中的ZVS运行范围,通过精确控制,系统实现恒定输出下的宽范围ZVS运行,且保证谐振槽无功电流最小。然而,额外的控制变量增加了控制复杂度,且其并未考虑自感变化的影响。文献[13]从耦合机构设计的角度来解决线圈自感变化的问题,实现了开环控制下的近似恒功率输出,但其并未考虑最小无功电流的ZVS运行和谐波的影响。文献[15, 18]从频率调谐的角度来应对线圈自感的变化,利用可变电容实时调整原副边谐振状态,但并未实现恒定输出,且未考虑谐波的影响。文献[19, 21]从补偿网络和参数优化的角度来应对线圈参数和负载变化情况,结合多目标优化算法,实现了开环控制下的恒定输出,但其并未实现最小无功电流的ZVS运行,且恒定输出性能受限;同时文献[21]中的CC和CV输出在两个不同的拓扑中实现,这限制了其应用范围。文献[22]同样考虑了线圈参数和负载变化,实现了CC输出与最小无功电流的ZVS运行,但其并未实现CV输出,且未考虑谐波对ZVS的影响。基于上述文献的优点与不足,本文综合考虑了线圈参数(互感和自感)和负载变化及谐波的影响,既满足了电池充电的恒定输出(CC或CV)需求,又实现了最小无功电流的ZVS运行。相比现有文献,本文所提方法考虑更为全面,实现效果更好。
表4 相关文献对比
Tab.4 Comparison of relevant references
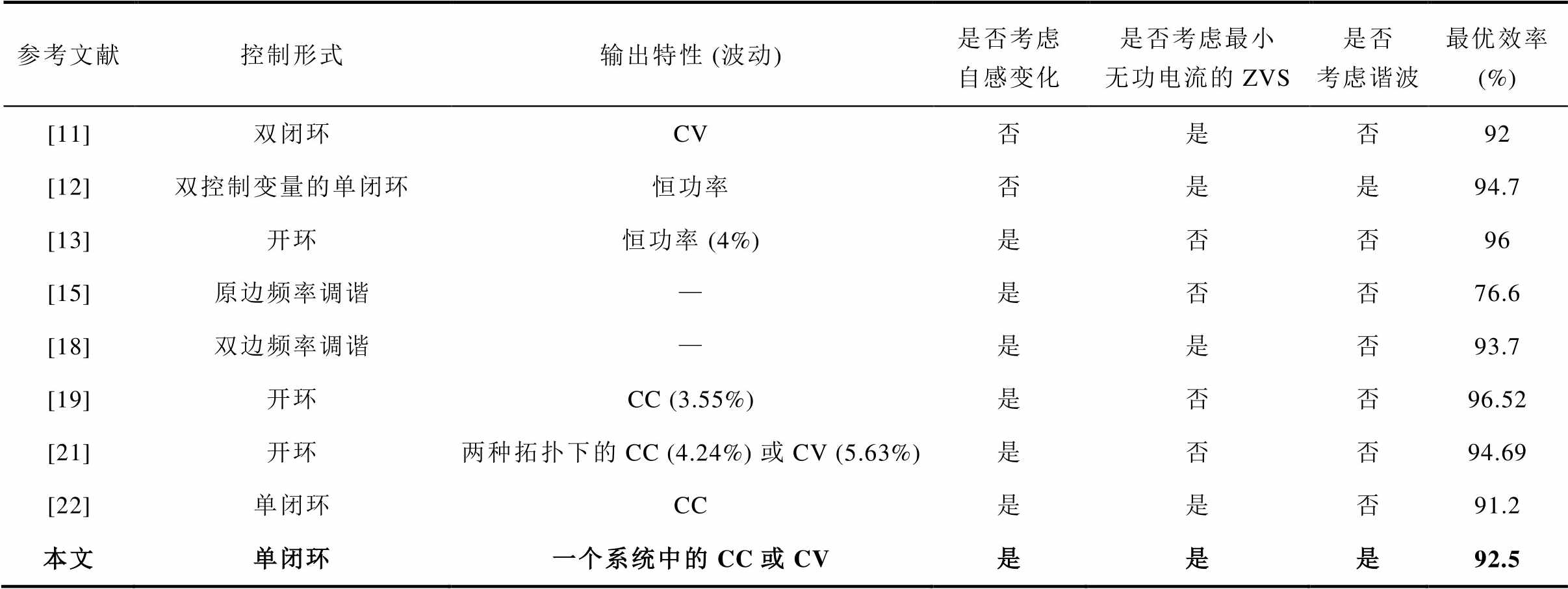
参考文献控制形式输出特性 (波动)是否考虑自感变化是否考虑最小无功电流的ZVS是否考虑谐波最优效率(%) [11]双闭环CV否是否92 [12]双控制变量的单闭环恒功率否是是94.7 [13]开环恒功率 (4%)是否否96 [15]原边频率调谐—是否否76.6 [18]双边频率调谐—是是否93.7 [19]开环CC (3.55%)是否否96.52 [21]开环两种拓扑下的CC (4.24%) 或CV (5.63%)是否否94.69 [22]单闭环CC是是否91.2 本文单闭环一个系统中的CC或CV是是是92.5
本文基于考虑谐波的时域模型,分析了线圈参数(自感和互感)和负载变化对系统ZVS运行的影响规律,并基于此提出了一种无功电流最小化的宽耦合范围ZVS实现方法。以LCC-S补偿型WPT系统为例,利用原边移相调制控制恒流和恒压输出,同时通过耦合机构和补偿参数的优化设计,系统地实现了宽耦合范围下的ZVS运行。实验结果表明,在最大216%的互感变化和37.9%的自感变化下,系统实现了与负载无关的CC/CV输出,最高效率达到92.5%。此外,本文仅考虑了垂直方向的气隙变化情况,尚未考虑横向偏移,这将在后续工作中进行研究。
参考文献
[1] 陈志鑫, 张献, 沙琳, 等. 基于频率调节的电动汽车无线充电互操作性提升方法研究[J]. 电工技术学报, 2023, 38(5): 1237-1247.
Chen Zhixin, Zhang Xian, Sha Lin, et al. Research on improving interoperability of electric vehicle wireless power transfer based on frequency adjustment[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1237-1247.
[2] 冯鸿运, 林飞, 杨中平, 等. 应用于自动导引小车无线充电系统的导航与供电一体化线圈研究[J/OL]. 电工技术学报, 2023: https://doi.org/10.19595/j.cnki. 1000-6753.tces.230831.
Feng Hongyun, Lin Fei, Yang Zhongping, et al. A research on a navigation and power supply integrated coil for automatic guided vehicle wireless power transfer system[J/OL]. Transactions of China Elec- trotechnical Society, 2023: https://doi.org/10.19595/ j.cnki.1000-6753.tces.230831.
[3] 刘哲, 苏玉刚, 邓仁为, 等. 基于双边LC补偿的单电容耦合无线电能传输系统[J]. 电工技术学报, 2022, 37(17): 4306-4314.
Liu Zhe, Su Yugang, Deng Renwei, et al. Research on single capacitive coupled wireless power transfer system with double-side LC compensation[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(17): 4306-4314.
[4] 胡秀芳, 王跃, 吕双庆, 等. 基于谐波状态空间的无线电能传输系统建模和稳定性分析[J]. 电力系统自动化, 2022, 46(11): 121-130.
Hu Xiufang, Wang Yue, Lü Shuangqing, et al. Modeling and stability analysis of wireless power transfer system based on harmonic state space[J]. Automation of Electric Power Systems, 2022, 46(11): 121-130.
[5] 孙淑彬, 张波, 李建国, 等. 多负载磁耦合无线电能传输系统的拓扑发展和分析[J]. 电工技术学报, 2022, 37(8): 1885-1903.
Sun Shubin, Zhang Bo, Li Jianguo, et al. Analysis and development on topologies of multi-load magnetic- coupling wireless power transfer system[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(8): 1885-1903.
[6] 崔淑梅, 宋贝贝, 王志远. 电动汽车动态无线供电磁耦合机构研究综述[J]. 电工技术学报, 2022, 37(3): 537-554.
Cui Shumei, Song Beibei, Wang Zhiyuan. Overview of magnetic coupler for electric vehicles dynamic wireless charging[J]. Transactions of China Electro- technical Society, 2022, 37(3): 537-554.
[7] Lu Fei, Zhang Hua, Zhu Chong, et al. A tightly coupled inductive power transfer system for low- voltage and high-current charging of automatic guided vehicles[J]. IEEE Transactions on Industrial Electronics, 2019, 66(9): 6867-6875.
[8] 薛明, 杨庆新, 章鹏程, 等. 机器人随机位置下动态无线供电阵列式发射模组优化设计[J]. 电工技术学报, 2022, 37(24): 6319-6331.
Xue Ming, Yang Qingxin, Zhang Pengcheng, et al. Optimal design of dynamic wireless power trans- mitting array module in random position of robot[J]. Transactions of China Electrotechnical Society, 2022, 37(24): 6319-6331.
[9] 焦超群, 杨旭, 杨俊峰, 等. 基于多目标优化理论的耦合无关恒压输出型LCC/S补偿感应电能传输系统[J]. 电工技术学报, 2023, 38(24): 6565-6580.
Jiao Chaoqun, Yang Xu, Yang Junfeng, et al. Coupling-independent constant-voltage output LCC/S compensation inductive power transfer system based on multi-objective optimization theory[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(24): 6565-6580.
[10] 李争, 唐明磊, 解波, 等. 无线电能传输零电压开关角跟踪和动态电容补偿矩阵复合控制策略[J/OL]. 电工技术学报, 2023: https://doi.org/10.19595/j.cnki. 1000-6753.tces.230453.
Li Zheng, Tang Minglei, Xie Bo, et al. Composite control strategy of zero voltage switch angle tracking and dynamic capacitance compensation matrix for wireless power transfer[J/OL]. Transactions of China Electrotechnical Society, 2023: https://doi.org/10. 19595/j.cnki.1000-6753.tces.230453.
[11] Li Yong, Liu Shunpan, Zhu Xiao, et al. Extension of ZVS region of series-series WPT systems by an auxiliary variable inductor for improving effici- ency[J]. IEEE Transactions on Power Electronics, 2021, 36(7): 7513-7525.
[12] Wang Xiaoqiang, Xu Jianping, Leng Minrui, et al. A hybrid control strategy of LCC-S compensated WPT system for wide output voltage and ZVS range with minimized reactive current[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 7908-7920.
[13] Choi J S, Jeong S Y, Choi B G, et al. Air-gap- insensitive IPT pad with ferromagnetic and conductive plates[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 7863-7872.
[14] Prasad K K, Agarwal V. Design recommendations considering charging pads’ self-inductance variation with LCC-S and LCC-LCC compensation based IPT chargers in low clearance EVs[J]. IEEE Transactions on Transportation Electrification, 2023, 99: 1.
[15] Kim D H, Ahn D. Self-tuning LCC inverter using PWM-controlled switched capacitor for inductive wireless power transfer[J]. IEEE Transactions on Industrial Electronics, 2019, 66(5): 3983-3992.
[16] Li Weihan, Wei Guo, Cui Chao, et al. A double-side self-tuning LCC/S system using a variable switched capacitor based on parameter recognition[J]. IEEE Transactions on Industrial Electronics, 2021, 68(4): 3069-3078.
[17] Li Weihan, Zhang Qianfan, Cui Chao, et al. A self- tuning S/S compensation WPT system without parameter recognition[J]. IEEE Transactions on Industrial Electronics, 2022, 69(7): 6741-6750.
[18] Tan Ping’an, Song Bin, Lei Wang, et al. Decoupling control of double-side frequency tuning for LCC/S WPT system[J]. IEEE Transactions on Industrial Electronics, 2023, 70(11): 11163-11173.
[19] 陆远方, 黎祎阳, 杨斌, 等. 考虑线圈参数变化的SS型动态无线电能传输系统参数优化设计方法[J]. 电工技术学报, 2022, 37(18): 4537-4547.
Lu Yuanfang, Li Yiyang, Yang Bin, et al. Parameter design method for SS compensated dynamic wireless power transfer system considering coils’ parameters variations[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4537-4547.
[20] Yang Bin, Lu Yuanfang, Peng Yuner, et al. Analysis and design of a T/S compensated IPT system for AGV maintaining stable output current versus air gap and load variations[J]. IEEE Transactions on Power Electronics, 2022, 37(5): 6217-6228.
[21] Lu Yuanfang, Yang Bin, He Shuangjiang, et al. Design of compensation topology for IPT system considering coils’ parameters and load variations for CC or CV output[J]. IEEE Transactions on Trans- portation Electrification, 2023, DOI: 10.1109/TTE. 2023.3272919.
[22] Jia Yahui, Wang Zhihui, Tang Chunsen, et al. An efficiency improvement method for the small air gap wireless power transfer system with variable parameters[J]. IEEE Transactions on Power Elec- tronics, 2023, 38(11): 13443-13453.
[23] 潘帅帅, 麦瑞坤, 徐叶飞, 等. 自动导引车感应充电系统目标三维空间漏磁屏蔽[J]. 电工技术学报, 2022, 37(5): 1078-1087.
Pan Shuaishuai, Mai Ruikun, Xu Yefei, et al. Three- dimensional target space magnetic leakage shielding for automated guided vehicle inductive charging system[J]. Transactions of China Electrotechnical Society, 2022, 37(5): 1078-1087.
[24] Hu Hongsheng, Cai Tao, Duan Shanxu, et al. An optimal variable frequency phase shift control strategy for ZVS operation within wide power range in IPT systems[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 5517-5530.
Implementation Method of Wide Range Zero Voltage Switching in Magnetic Coupling Wireless Power Transfer System
Abstract Air gap variations between coils are inevitable in magnetic coupling wireless power transfer (MC-WPT) systems. At the same time, due to the presence of magnetic and metallic materials, air gap variations can change mutual inductance and self-inductance, which is particularly evident in small air gap applications. Mutual inductance variations lead to output power fluctuation, and self-inductance variations lead to detuning and system input impedance change. Thus, achieving zero voltage switching (ZVS) in an inverter is challenging. Thus, power and efficiency are reduced. Taking the wireless charging system of an automatic guided vehicle (AGV) as an example, this paper proposes a wide coupling range ZVS implementation method for the MC-WPT system, considering coil parameters and load variations.
Firstly, a time-domain analysis model of the LCC-S compensation system is established. The influence of coil parameters (mutual inductance and self-inductance) and load variations on the ZVS operation is studied. As the air gap gradually decreases, the self-inductance of the primary coil and the mutual inductance changes are not conducive to the ZVS operation, and the self-inductance changes of the secondary coil are conducive. By keeping the self-inductance in the primary coil unchanged and combining with the ZVS critical condition, the relationship between the mutual inductance and change in self-inductance of the secondary coil within the full load range is fitted, which is the ZVS operation boundary trajectory of the WPT system.
Secondly, phase shift modulation (PSM) achieves constant current/voltage (CC/CV) output to charge the AGV battery. At the same time, based on the ZVS operation boundary trajectory, the self-inductance of the primary coil remains constant through coil structure and compensation parameter optimization, and the self-inductance of the secondary coil changes into a favorable variable inductive input impedance, effectively expanding the ZVS operating range of PSM. Moreover, the reactive current of the system is minimized within the full coupling range, which is beneficial for improving efficiency. Compared to the traditional ZVS range expansion method, the proposed method utilizes the parameter variation characteristics of the coil itself without additional control variables to avoid the adverse effects from self-inductance changes, which is more straightforward and more effective.
Finally, a 250 W experimental platform is built to verify the correctness and effectiveness of the theoretical analysis. The experimental results show that within the air gap range of 10 mm to 60 mm, under a maximum self-inductance variation range of 32.88 mH to 23.84 mH and a maximum mutual inductance variation range of 19.13 mH to 6.05 mH, wide coupling range ZVS operation and CC/CV output are achieved with the minimum reactive current, and the peak efficiency is 92.5%.
Keywords:Magnetic coupling wireless power transfer (MC-WPT), zero voltage switching (ZVS), constant current/constant voltage (CC/CV) output, wide coupling range
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.231802
中央高校基本科研业务费专项资金(2022CDJHLW010)和广西壮族自治区重点研发计划(桂科AB23026102)资助项目。
收稿日期 2023-10-30
改稿日期 2023-12-04
贾亚辉 男,1996年生,博士研究生,研究方向为无线电能传输技术、电力电子技术。
E-mail: 20153965@cqu.edu.cn
赵 雷 男,1989年生,博士,副教授,研究方向为无线电能传输、电力电子系统与控制。
E-mail: lzha915@aucklanduni.ac.nz(通信作者)
(编辑 陈 诚)