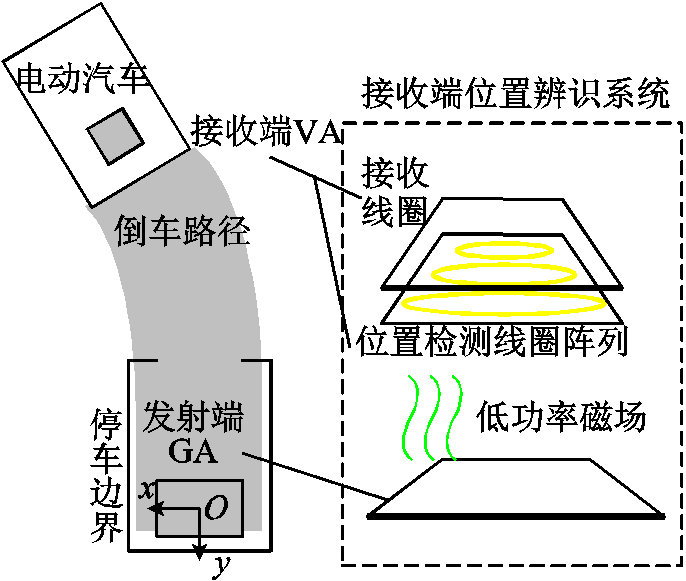
图1 接收端位置辨识系统示意图
Fig.1 Schematic of the receiver position detection system
摘要 电动汽车无线充电系统中,接收端定位技术能够辅助进行停车路径引导,解决停车偏移造成的充电功率和效率跌落等问题。但由于电磁定位法所用到的磁场幅值有限且空间分布形式复杂,现有的电磁定位技术难以实现大偏移范围内接收端的精准定位。该文设计了一种采用非中心对称线圈结构的接收端位置检测装置,并提出接收端在离散二维空间内位置坐标的行迹递推算法,能够实时获取大偏移范围内接收端的高精度二维位置信息。仿真和实验结果表明,该方法的最大定位范围为±800 mm,在±600 mm范围内定位精度小于20 mm,±600~±800 mm范围内定位精度小于50 mm,定位准确率不小于96%。
关键词:无线充电 位置检测 电磁感应 电动汽车
无线电能传输(Wireless Power Transfer, WPT)技术以其灵活、安全、可靠等优势在电动汽车充电领域得以广泛的应用[1-2]。但在实际应用过程中,如果缺乏引导,很多人工驾驶或无人驾驶的电动车将无法准确地停在有效的充电区域内[3],从而导致充电失灵、系统效率降低等问题,大大限制了无线充电技术的推广;严重的情况下,过量的电磁(Electromagnetic Field, EMF)泄漏还会使附近的金属物体在短时间内温度剧烈升高而引发火灾,超标的电磁辐射也会对人体造成损伤,严重危害人身生命财产安全[4-8]。
为此,接收端位置检测技术被列为无线电能传输三大辅助功能之一,该项技术的发展与完善将有效解决上述问题。结合SAE J2954[9]与IEC 61980[10]标准,电动汽车无线充电系统接收端的定位方法可以根据定位信号的类型分为机器视觉[11-13]、无线通信[14-15]、卫星导航[16-17]、电磁定位[18-19]等。其中,基于电磁定位原理的低功率激励法(Low Power Excitation, LPE)能够在保证检测精度与速度的前提下实现中远距离的定位检测,兼具成本低、体积小、易维护、普适性强等优点[20-22]。
基于低功率激励法,佐治亚大学的Gao Yabiao等设计了一种车载四线圈的位置检测装置,并提出了基于查表法的三维坐标确定方法,实现了发射线圈上方区域内的接收端位置检测[20]。但查表法通用性差、比对效率低,且占用大量内存资源。针对算法的不足,南京航空航天大学的陈乾宏等提出了基于直流预激励与磁场感应的电动汽车无线充电位置检测装置,通过计算磁感应强度计算发射端几何中心与四个Hall元件的距离来反解接收端坐标[21]。但该方法的定位范围较小,仅为-10 cm≤y≤10 cm,-8 cm≤x≤8 cm。为提升定位范围,南京师范大学王维等提出一种基于互感符号判别的双极定位算法,实现了±15 cm~±100 cm范围内对接收端所处象限的判断[22],但这种定位方法仅能够判断接收端的大致位置,定位精度较低。东南大学Tan Linlin等提出了基于欧氏距离的接收端位置坐标计算方法,定位精度得到提升,但未能有效论证该方法中定位信号与位置坐标的唯一性对应关系,且有效检测范围在±15 cm范围内[23]。印度理工学院A. Badu等研究了辅助定位线圈与接收端线圈耦合系数随接收端位置的变化规律,揭示了电磁定位有效范围小的原因在于磁场空间分布的非线性[24]。
综上所述,现有电磁定位方法存在定位检测范围小、检测范围与精度无法兼顾的问题。本文针对现有研究的不足,提出采用非中心对称结构线圈阵列(后称位置检测线圈阵列)的接收端位置辨识装置,实现检测结果唯一;兼顾感应电动势幅值与空间利用率,提升检测精度;提出基于行迹递推与曲线拟合相交思想的接收端位置辨识算法,保证大范围内检测结果的有效性。
本文从LPE位置检测出发,首先研究了低功率激励源在空间中激发磁场的分布特性,提出定位系统的建模方法与设计准则;其次结合曲线拟合相交与二维空间线性离散的分析方法,研究了位置检测线圈阵列的感应电压向量与接收端位置坐标的映射关系,提出了基于检测灵敏度的接收端二维位置行迹递推算法;最后通过实验和仿真验证了系统的有效定位范围与定位精度。
本文采用LPE位置检测的原理进行接收端位置检测。在停车路径引导过程中,地面发射端(Ground Assembly, GA)线圈中通有小功率励磁电流,车载位置检测线圈随电动汽车移动,接收端(Vehicle Assembly, VA)周围的磁场分布随其位置发生变化,导致位置检测线圈的感应电动势发生变化。以感应电动势为媒介,可建立磁场分布特征与接收端位置集合的映射关系,将不同的磁场分布情况与其对应的接收端位置相关联,即可实现接收端位置辨识。
因此,首先需要获取发射端激励磁场的空间分布形态,本文以SAE J2954中的WPT3 Z2系统[9]为例展开分析。接收端位置辨识系统示意图如图1所示,发射端采用矩形平面螺旋线圈,以发射线圈几何中心为原点,倒车方向为y轴正方向建立坐标系。位置检测线圈被固定在接收线圈正下方,电动汽车运动时,位置检测线圈与接收线圈相对静止。
图1 接收端位置辨识系统示意图
Fig.1 Schematic of the receiver position detection system
在发射线圈中通入频率为85 kHz、有效值为10 A的小功率励磁电流,仿真得到VA平面上磁感应强度轴向分量Bz的空间分布如图2所示。在VA平面上Bz从发射线圈中心开始,以先升高后降低的趋势向四周呈辐射状分布。检测线圈的感应电动势与收发线圈相对距离之间为非单调关系,且磁场空间分布轮廓具有较好的对称性,为实现感应电动势与接收端位置映射的唯一性,需对位置检测线圈的形状及线圈阵列空间排布方式做进一步设计。
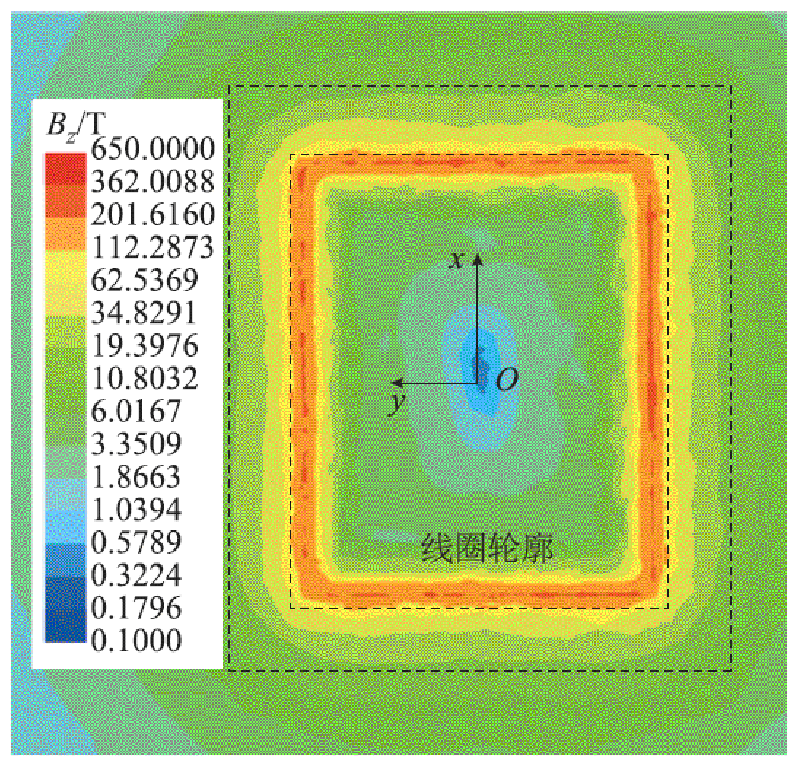
图2 接收端所在平面Bz分布
Fig.2 Spatial distribution of Bz around VA
包含位置检测线圈时,系统电路模型如图3所示。
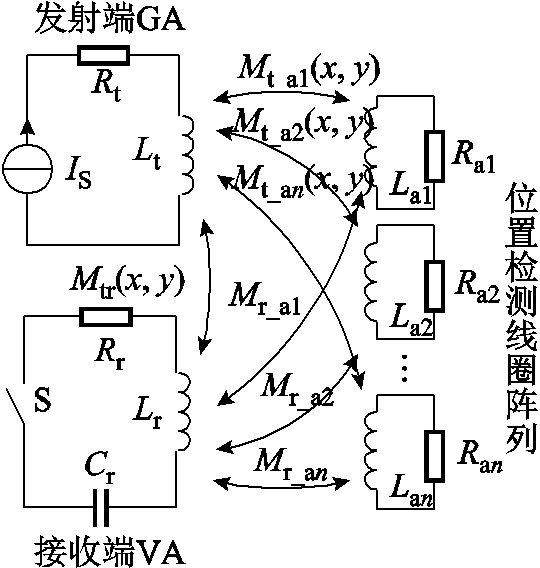
图3 包含位置检测线圈的系统电路模型
Fig.3 Equivalent circuit model of the WPT system with positioning coil array
为了保护接收端的电力电子器件,在路径引导过程中接收线圈断路,此时气隙磁场完全由发射端励磁电流激发。由电路模型得到位置检测线圈的感应电动势有效值为
 (1)
(1)
式中,f为励磁电流频率,f =85 kHz; 为各检测线圈与发射线圈间的互感;
为各检测线圈与发射线圈间的互感; 为定位励磁电流有效值。
为定位励磁电流有效值。
由式(1)可知,对固定频率(f =85 kHz)的无线充电系统,位置检测线圈的感应电动势 与励磁电流
与励磁电流 、互感Mt_a有关,而互感是接收端位置(x, y)的函数,这说明位置检测线圈的感应电动势与接收端位置存在某种映射关系,可以通过观测检测线圈的感应电动势获取接收端的位置信息。
、互感Mt_a有关,而互感是接收端位置(x, y)的函数,这说明位置检测线圈的感应电动势与接收端位置存在某种映射关系,可以通过观测检测线圈的感应电动势获取接收端的位置信息。
根据系统的电路模型,接收端的位置信息可借助互感转换为可观测的感应电动势向量。若不考虑VA高度的变化,则VA的每个二维位置坐标都对应一个感应电动势,对每个电动势分量都可以构造出一个映射到接收端位置的二元向量函数。理论上,求解这些函数的多值反函数的交集即可得到接收端的位置信息。
在设计过程中无需考虑互感的精确计算,仅利用感应电动势随接收端位置的变化规律设计位置检测线圈的构型、尺寸及线圈间相对位置即可。
1.3.1 位置检测线圈阵列的构型
由于电动汽车上空间有限,位置检测线圈阵列外轮廓不超过接收端外轮廓,同时采用平面螺旋构型降低VA的厚度。
由图2可知,在VA平面内,磁场分布轮廓线为矩形,具有较好的轴对称与中心对称性。为了保证接收端位置辨识的唯一性,位置检测线圈阵列应具有一定的非对称性,以降低大范围内接收端位置识别的错误率。当接收端偏移范围较大时,其周围磁场幅值较小,为了提升检测范围,穿过每个位置检测线圈的有效磁通面积应该尽量大,各线圈的有效面积也应保证相同,以兼顾感应电压幅值与空间利用率。综合上述分析提出一种非中心对称三线圈阵列,如图4所示,图中,Wr为接收端外轮廓边长。
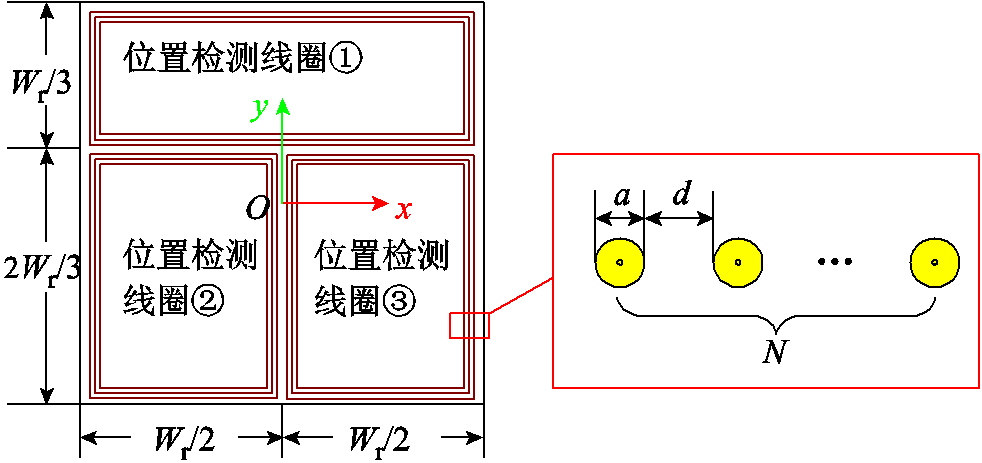
图4 非中心对称三线圈阵列
Fig.4 Triple positioning coil array with non-centrosymmetric structure
1.3.2 线径、线圈匝数与线间距的设计
基于图4所示位置检测线圈阵列构型,进一步对线径a、线圈匝数N与线间距d进行设计。从对系统性能影响的角度,这三个参量之间相互耦合,不能对单一参量独立设计,因此本文基于线圈有效磁通面积与三个设计参量间的计算关系,构建等效系数进行综合设计。
首先引入检测灵敏度的概念。当接收端移动时,感应电动势随之变化,变化率越大,系统可检测的磁场变化越细微,则系统的检测精度越高,给出的位置坐标越精确。检测灵敏度能够准确形象地表征检测精度:基于灵敏度分析的思想,本文定义位置检测线圈感应电动势U对接收端VA位移s的变化率为检测灵敏度,用δ表示为
 (2)
(2)
由式(2)可知,δ越大,位置检测线圈感应电动势随接收端位置变化越明显,检测精度越高,辨识性越强。值得注意的是,空间中不同位置的磁场幅值不同,因此δ也是VA位置的函数。高δ区域检测精度高、结果置信度高,δ值低于仪器检测区间对应的分辨精度,定位检测失效。
接下来基于检测灵敏度理论,对位置检测线圈进行设计。由法拉第电磁感应定律,线圈的感应电动势为
 (3)
(3)
式中,N为检测线圈匝数; 为穿过检测线圈有效正对面积的平均磁通密度;
为穿过检测线圈有效正对面积的平均磁通密度; 为每匝检测线圈的平均有效正对面积;
为每匝检测线圈的平均有效正对面积; 为系统频率,即励磁电流频率。
为系统频率,即励磁电流频率。
当VA位移ds时,穿过线圈的磁感应强度变化dBz。系统频率ω固定,决定检测灵敏度的是线圈的有效磁通面积NSa。由有效磁通面积的定义,计算得到N匝矩形线圈总的有效面积为
平均面积为
 (5)
(5)
其中
 (6)
(6)
式中,l和w分别为矩形平面螺旋线圈外轮廓的长和宽。根据图4所示线圈结构,位置检测线圈外轮廓尺寸满足wl = S0,S0为接收端正对发射端总面积的1/3。
分析式(5)中二次函数的单调性,平均面积Sa随m的增加而减小,因此引入感应系数
 (7)
(7)
使得
 (8)
(8)
式(8)表示表征检测性能的电压灵敏度δ与感应系数kindu之间呈正相关关系。感应系数kindu表征位置检测线圈的磁场拾取能力,刻画了检测灵敏度与位置检测线径a、线圈匝数N与线间距d之间的关联关系。系数越大,系统的定位精度与有效定位范围越大。不同感应系数对应的1号线圈检测灵敏度如图5所示。
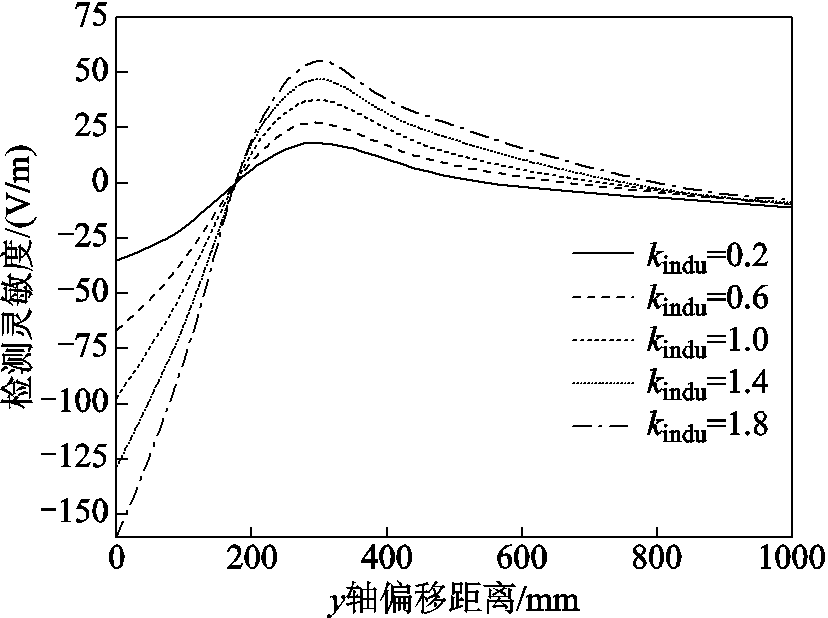
图5 不同检测线圈参数对检测效果的影响
Fig.5 Detection sensitivity vary with kindu
结合式(7)与图5可知,线圈的线径a越小、线间距d越小、匝数N越大,检测效果越好。兼顾检测线圈对能量传输的影响、线圈间的邻近效应与检测过程中线圈的发热因素,确定适用于WPT3 Z2系统[9]的位置检测系统的部分基本参数,见表1。
表1 位置检测系统基本参数
Tab.1 Basic parameters of position detection system
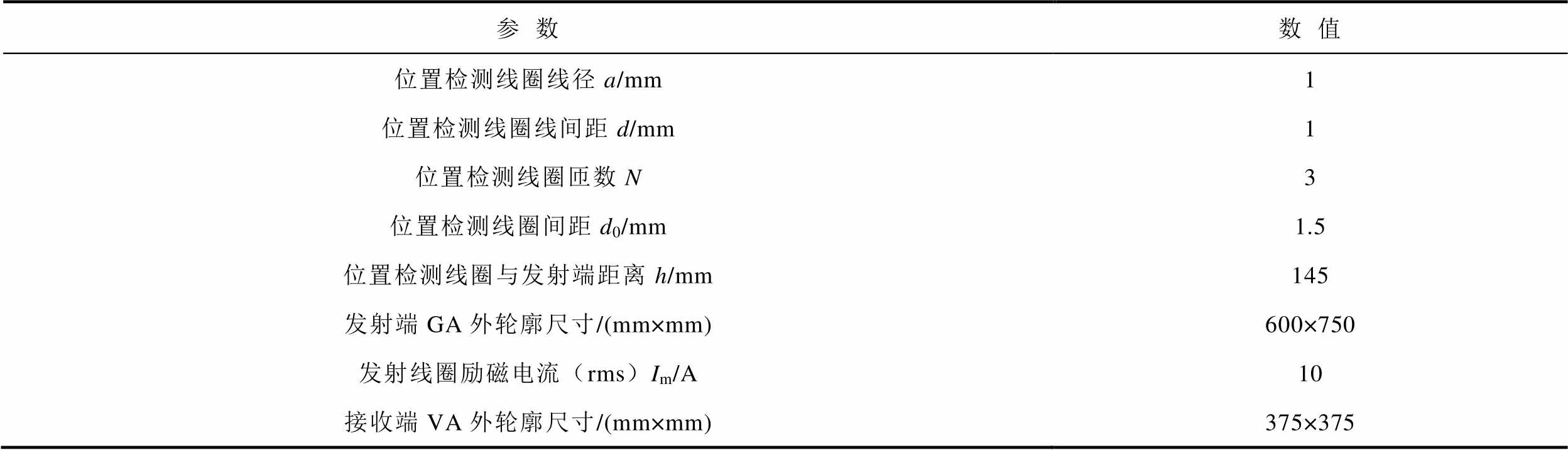
参数数值 位置检测线圈线径a/mm1 位置检测线圈线间距d/mm1 位置检测线圈匝数N3 位置检测线圈间距d0/mm1.5 位置检测线圈与发射端距离h/mm145 发射端GA外轮廓尺寸/(mm×mm)600×750 发射线圈励磁电流(rms)Im/A10 接收端VA外轮廓尺寸/(mm×mm)375×375
据上述分析,每个线圈的感应电动势都对应一个空间坐标的二元函数,求解其多值反函数的交集即可得到准确的位置信息。然而,多值反函数的求解方法复杂、效率低,且反函数存在的条件苛刻。本节从接收端VA沿直线运动的情况入手,提出曲线拟合交点法计算接收端一维位置坐标,该方法适用于非单射单值函数的逆映射求解问题。接下来以接收端VA沿y轴运动为例展开分析。
首先需要感应电动势对VA位置坐标函数进行拟合。沿VA运动路径离散地选取若干位置,仿真得到三个位置检测线圈感应电动势U1、U2、U3在这些位置对应的值,采用拉格朗日插值或牛顿插值法构造多项式,形式为
 (9)
(9)
由于观察到曲线在y → ±∞时均收敛到0,为避免Runge现象,采用三次样条插值,得到仿真离散点插值拟合函数U1,2,3= S1,2,3(y),如图6所示。这三条电压曲线是计算位置坐标的已知条件。在实际应用中,这三条曲线需要被事先测试、拟合出来,并预存在存储器中。
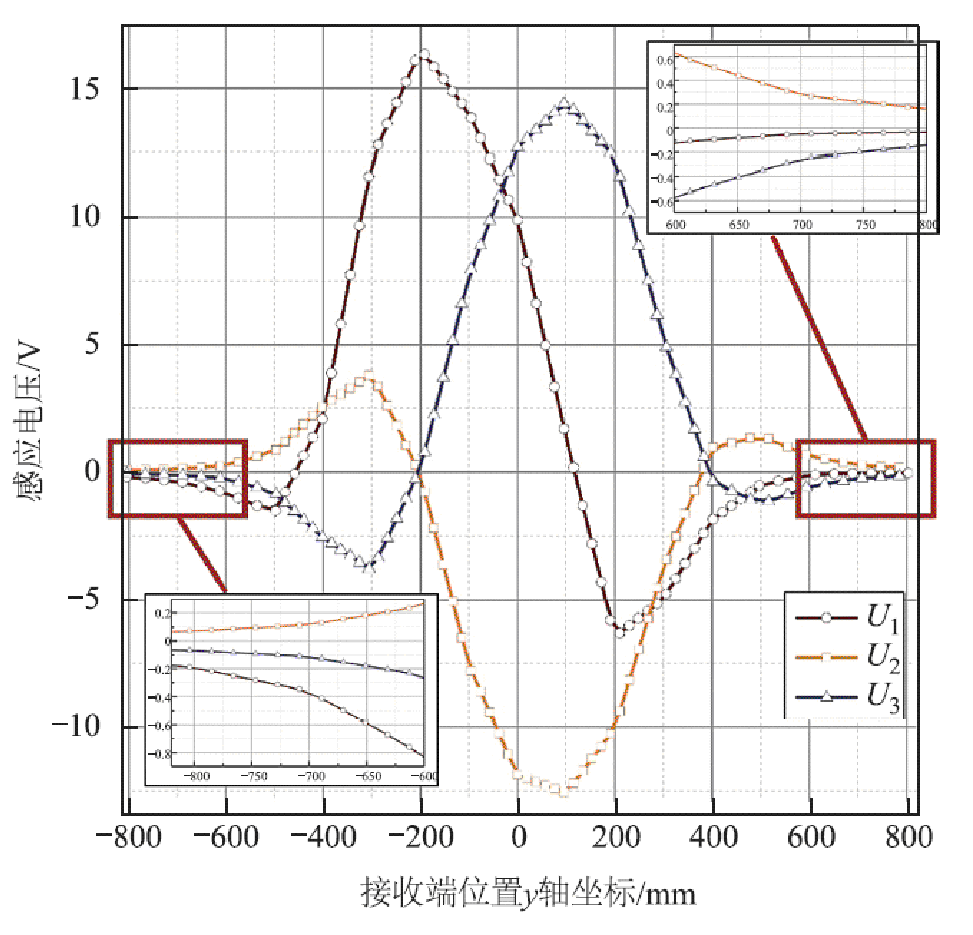
图6 感应电压随VA沿y轴运动仿真插值拟合曲线
Fig.6 Simulatedinductivevoltage fitting curves of three positioning coils vary with VA moves along y axis
接下来进行位置坐标信息的获取。由系统的电路模型可知,VA的位置坐标被转换为线圈电动势。在定位过程中,位置检测装置的输出是VA处于当前位置对应的三维感应电动势,要得到位置信息,就要对图6所示的三条电压曲线求反解。由图6可知,感应电压函数组U1,2,3= S1,2,3(y)非单调,不存在反函数,这时便需要采用交点法求解其逆映射。
交点法求解VA一维坐标如图7所示。图7中,在t0时刻接收端VA运动至(0, y0),对应位置检测线圈输出电压向量U= [U10 U20 U30],每个电压分量对应一条平行于横轴的直线U=U10,U=U20以及 U = U30。直线与相应的曲线S1,2,3(y)相交,产生三组交点,这三组交点的横坐标(接收端纵坐标y的值)构成三个集合Y1={y11,y12, },Y2={y21,y22,},Y3={y31,y32,},则Y1∩Y2∩Y3={y0}。
},Y2={y21,y22,},Y3={y31,y32,},则Y1∩Y2∩Y3={y0}。
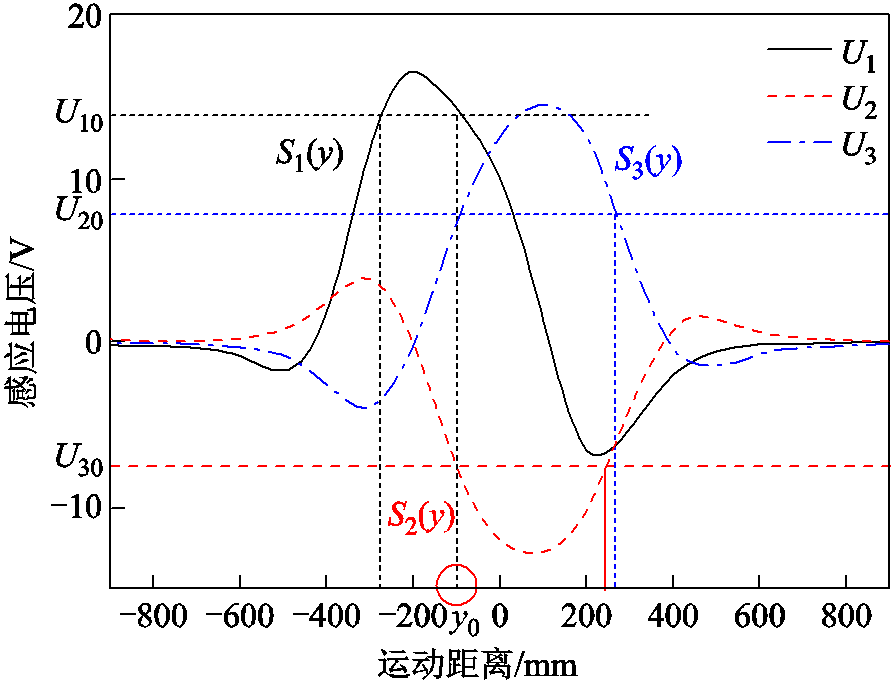
图7 交点法求解VA一维坐标
Fig.7 intersectionpointsmethodto solve VA one-dimensional coordinate
理论上,在具有检测唯一性的区域内,交集包含且仅包含一个元素y0,但曲线拟合误差的存在会导致交集为空的情况。这种情况下,考虑到电压-距离曲线具有连续性,采用式(10)计算位置坐标。
 (10)
(10)
曲线拟合交点法扩展至二维平面空间,则为曲面拟合交线法,即拟合三个电压曲面与实测电压平面相交,待测位置信息位于交线的公共交点上。这种方法的运算量大幅增加,计算速度低,且曲面拟合所需数据量大,占用过多内存资源。本文将二维平面空间离散化,平行y轴按检测精度ν将二维平面空间等距分割为若干条直线x= ±ν、x= ±2ν、x= ±3ν  。每条空间直线上对应的三电压曲线为
。每条空间直线上对应的三电压曲线为
 (11)
(11)
在检测过程中,位置检测线圈输出的三维电压向量对应直线与这些曲线分别相交,即可得到不同离散直线下对应的坐标点集为
 (12)
(12)
VA真实位置的纵坐标就包含在集合Y中。
然而,在实际的停车过程中,电动汽车不会严格地沿着这些直线运动,VA的运动往往伴随着空间直线的跨越。本文结合行迹递推思想,利用检测灵敏度δ进一步计算VA位置的横坐标x。
对检测灵敏度做进一步计算分析,在电动汽车运动过程中,检测灵敏度可表示为
 (13)
(13)
式中,t0为采样初始时刻;Δt为采样时间间隔;s0为采样初始时刻对应接收端的初始位置。随着电动汽车的运动,三个位置检测线圈的感应电动势将以固定频率f=1/Δt被采样记录,用以实时计算三个检测灵敏度。由于停车过程中车体运动偏转程度小,式(13)所示检测灵敏度可以看作是感应电压的y方向导数。
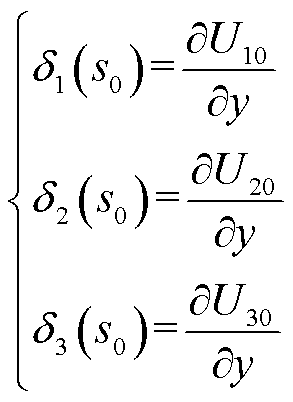 (14)
(14)
这样,前后两个时刻下,位置检测线圈的输出可被处理得到对应VA二维位置信息的六维向量,即
 (15)
(15)
此时回到式(11)与式(12),对(12)表示集合中的每个坐标点,都可以通过其对应式(11)中的电压曲线计算得出该点的检测灵敏度向量,由此得到
 (16)
(16)
在集合D中选取满足式(17)的点的坐标,作为最终的定位结果。
 (17)
(17)
反解VA二维位置的流程如图8所示。考虑实际的停车情况,在±1 500 mm范围内主要考虑车体沿直线运动。受限于地面障碍物,车体侧向偏移程度较小,因此只需要构造出几组曲线就可以满足定位检测要求。理论上,对x轴变量的离散化处理能够大幅度减小运算量、提升计算速度;基于检测灵敏度的动态检测法进一步提升了检测精度,保证了检测唯一性。
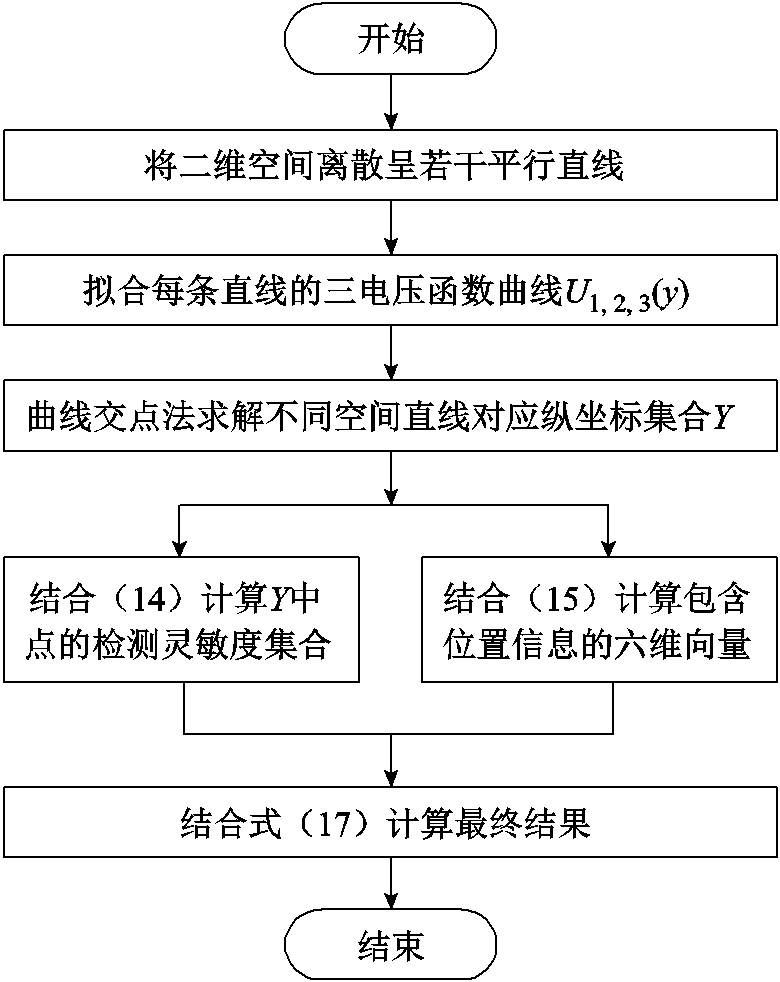
图8 反解VA二维坐标流程
Fig.8 Flow chart of the inverse solution of VA two dimension coordinate
接收端位置信息包含在位置检测线圈的感应电动势向量中。为保证位置辨识的唯一性,需保证接收端位置坐标与感应电动势向量一一对应。系统的镜像对称性是影响位置辨识唯一性的最重要因素。为了避免系统几何对称造成的检测失效,本文基于非对称空间坐标变换原理提出具有非对称几何结构的位置检测线圈阵列,所提出的位置辨识系统可以实现大偏移范围内检测结果的唯一性。
坐标变换关系示意图如图9所示,图9中接收端几何中心为O,三个位置检测线圈的几何中心分别为O1、O2和O3。当接收线圈的几何中心分别位于具有镜像对称性的P1、P2、P3和P4四个点时,三个位置检测线圈的几何中心坐标满足表2。
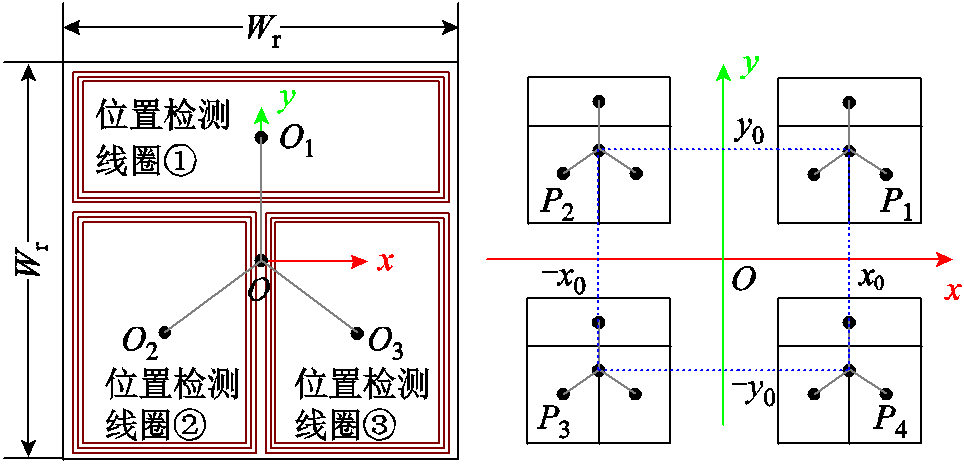
图9 坐标变换关系示意图
Fig.9 Schematic of the spatial coordinate transformation
表2 空间坐标变换关系
Tab.2 Spatial coordinate transformation relationship
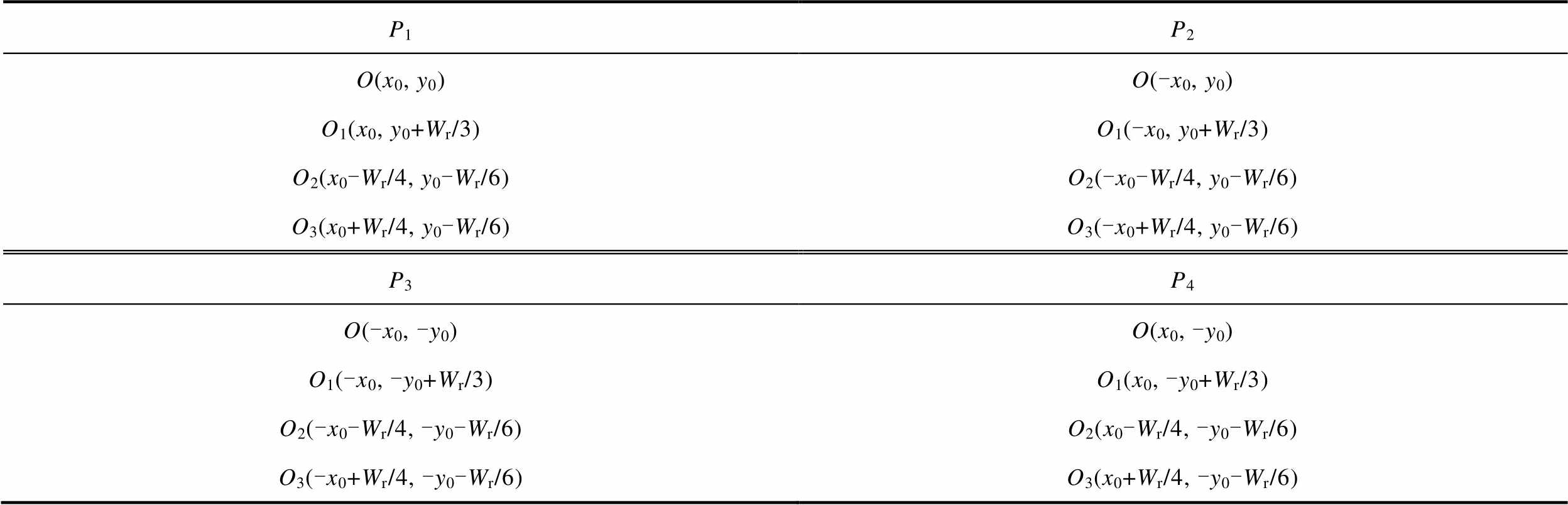
P1P2 O(x0, y0)O(-x0, y0) O1(x0, y0+Wr/3)O1(-x0, y0+Wr/3) O2(x0-Wr/4, y0-Wr/6)O2(-x0-Wr/4, y0-Wr/6) O3(x0+Wr/4, y0-Wr/6)O3(-x0+Wr/4, y0-Wr/6) P3P4 O(-x0, -y0)O(x0, -y0) O1(-x0, -y0+Wr/3)O1(x0, -y0+Wr/3) O2(-x0-Wr/4, -y0-Wr/6)O2(x0-Wr/4, -y0-Wr/6) O3(-x0+Wr/4, -y0-Wr/6)O3(x0+Wr/4, -y0-Wr/6)
由表2可知,三个位置检测线圈的位置相对于接收线圈的空间坐标变换不对称,当接收端位于镜像对称位置时,磁场空间分布对称,但任意位置检测线圈的相对位置均不具有镜像对称性。此时位置检测线圈感应出的电动势向量不相同,解决了磁场空间分布对称情况下位置辨识唯一性的问题。
搭建的无线电能传输系统位置对齐检测实验平台如图10所示,由逆变电源、PFC模块、双边LCC补偿拓扑、发射端GA、接收端VA与位置检测线圈阵列组成,其中位置检测线圈阵列集成在VA中。采用三自由度测试台架模拟GA、VA之间任意相对位置的情况。
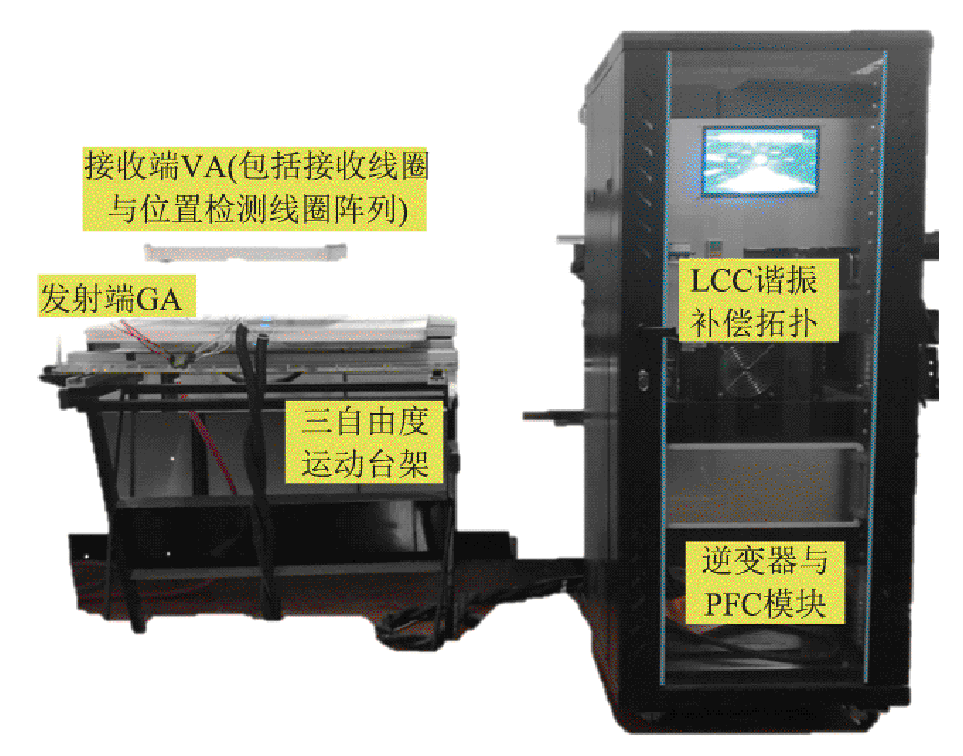
图10 用于WPT3 Z2系统位置检测系统实验平台
Fig.10 Prototype of the VA positioning system for WPT3 Z2 system
设计的检测系统的内部结构如图11所示。位置检测线圈的输出经过调理电路滤波、放大处理为直流信号,经运算器微控制器(Micro Control Unit, MCU)MCU计算得到接收端位置信息,并编码后通过Wi-Fi通信到边缘计算机的可视化显示屏上。
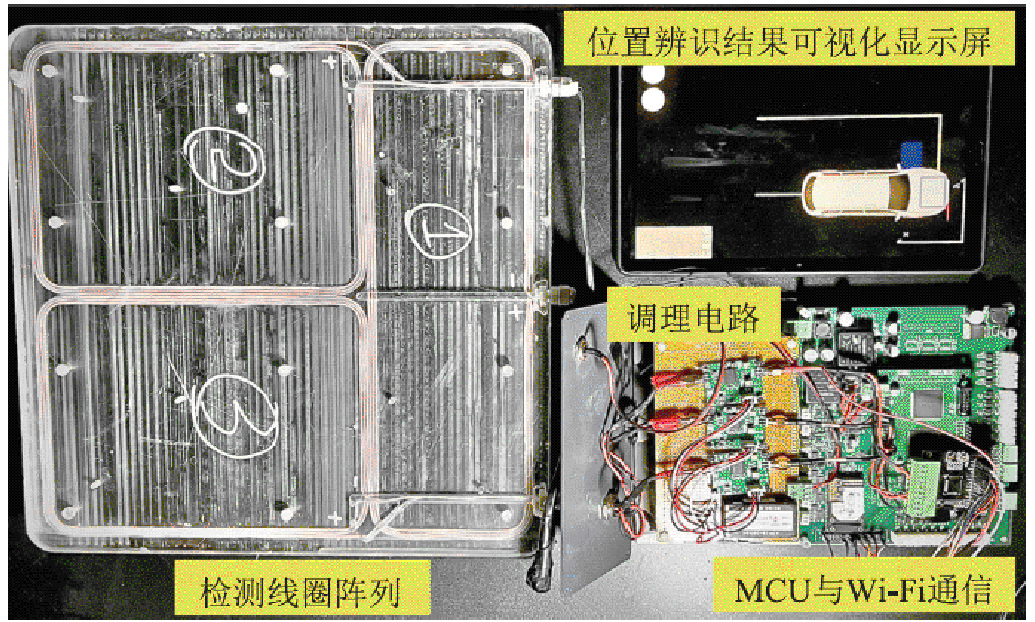
图11 VA位置检测系统
Fig.11 VA positioning system
在发射线圈中通入10.86 A的低功率励磁电流,移动测试台架,使接收端沿y轴正向移动,每隔 25 mm进行电压采样,得到三条位置检测线圈感应电动势实测结果的拟合曲线,并与图6得到的仿真结果进行对比,如图12所示。
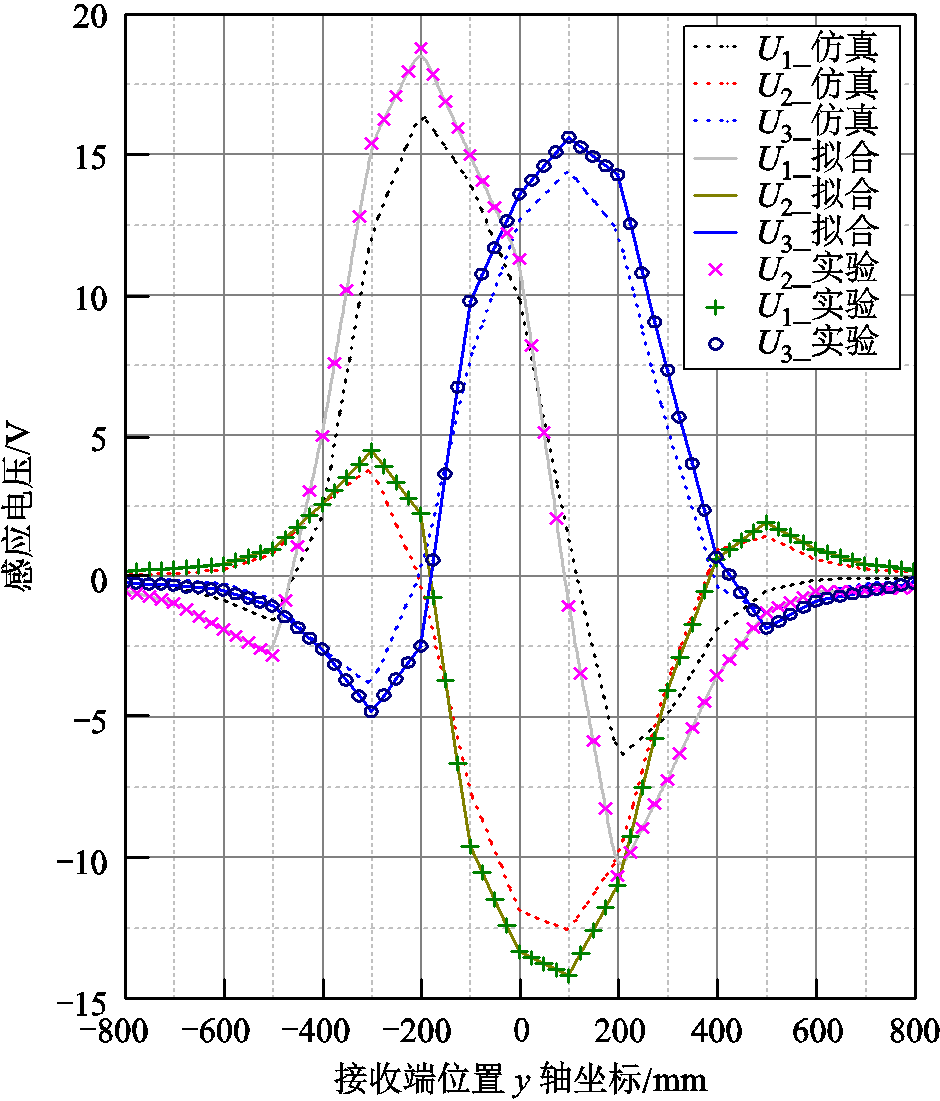
图12 位置检测线圈感应电动势曲线实测对比仿真结果
Fig.12 Measurement results of induced voltage curves compared with simulation results
由图12可知,该检测装置的能检范围不小于±800 mm,具有明显检测效果的范围不小于 ±600 mm。二者在变化趋势与数据范围上基本相同;当接收端横坐标各不相同时,均可测得感应电压曲线簇,实测曲线和仿真曲线形态与电压尺度基本相同。实验证明位置检测线圈构型及尺寸设计合理,位置辨识装置能够有效地将大偏移范围内接收端位置信息转换为可检测的感应电动势信息。
3.3.1 曲线交点拟合验证性算例
首先将接收端预置于某个待测位置,读取此时三线圈感应电动势UT=[-5.843 4 -12.580 1 14.950 0];接下来作三条直线分别与图13中三条实测电动势曲线相交,交点所在三个窗口如图13所示。
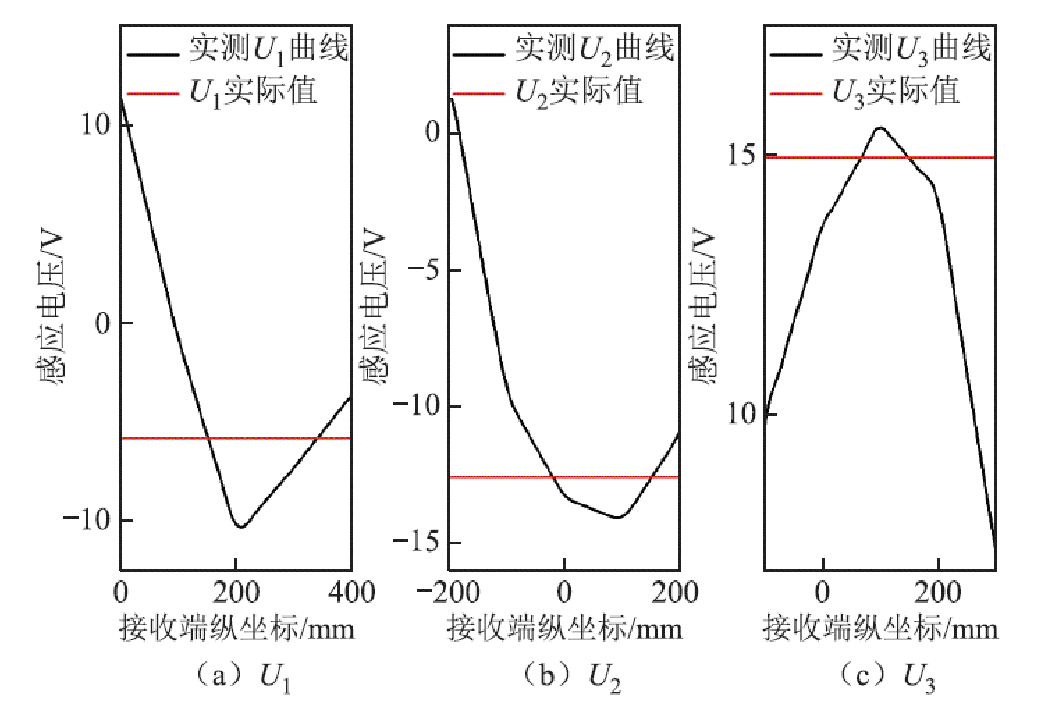
图13 算例结果
Fig.13 Sample results
经由曲线拟合求解交点,得到图13a中交点纵坐标为y11=150.243 mm, y12=341.65 mm;图13b中交点纵坐标为y21=-10.991 mm, y22=150.036 mm;图13c中交点纵坐标为y31=76.068 mm, y32=149.485 mm。显然,接收端纵坐标在150 mm附近,取y11、y22与y32平均值为位置检测结果ydec=149.921 mm。此时接收端所在实际位置的纵坐标为150 mm。
上述算例中,电动势的读取由电压探头完成,位置坐标的计算由边缘计算机完成。接收端位于y轴,将检测电压与图12所示电压曲线比对后可得到准确的纵坐标。当接收端在x轴方向有微小偏移时,需要按照图8所示位置检测流程,通过计算含有位置信息的六维向量进一步确定接收端的横坐标x。受限于篇幅,省去具体过程,下面给出大范围内二维定位实测结果的误差分析。
3.3.2 位置辨识误差
将带有接收端位置辨识系统的WPT3 Z2系统安装在高精度智能控制三自由度运动台架上,选取定位范围内规则分布的400个点进行动态接收端二维位置辨识。位置辨识结果如图14a所示,位置辨识误差统计如图14b所示。
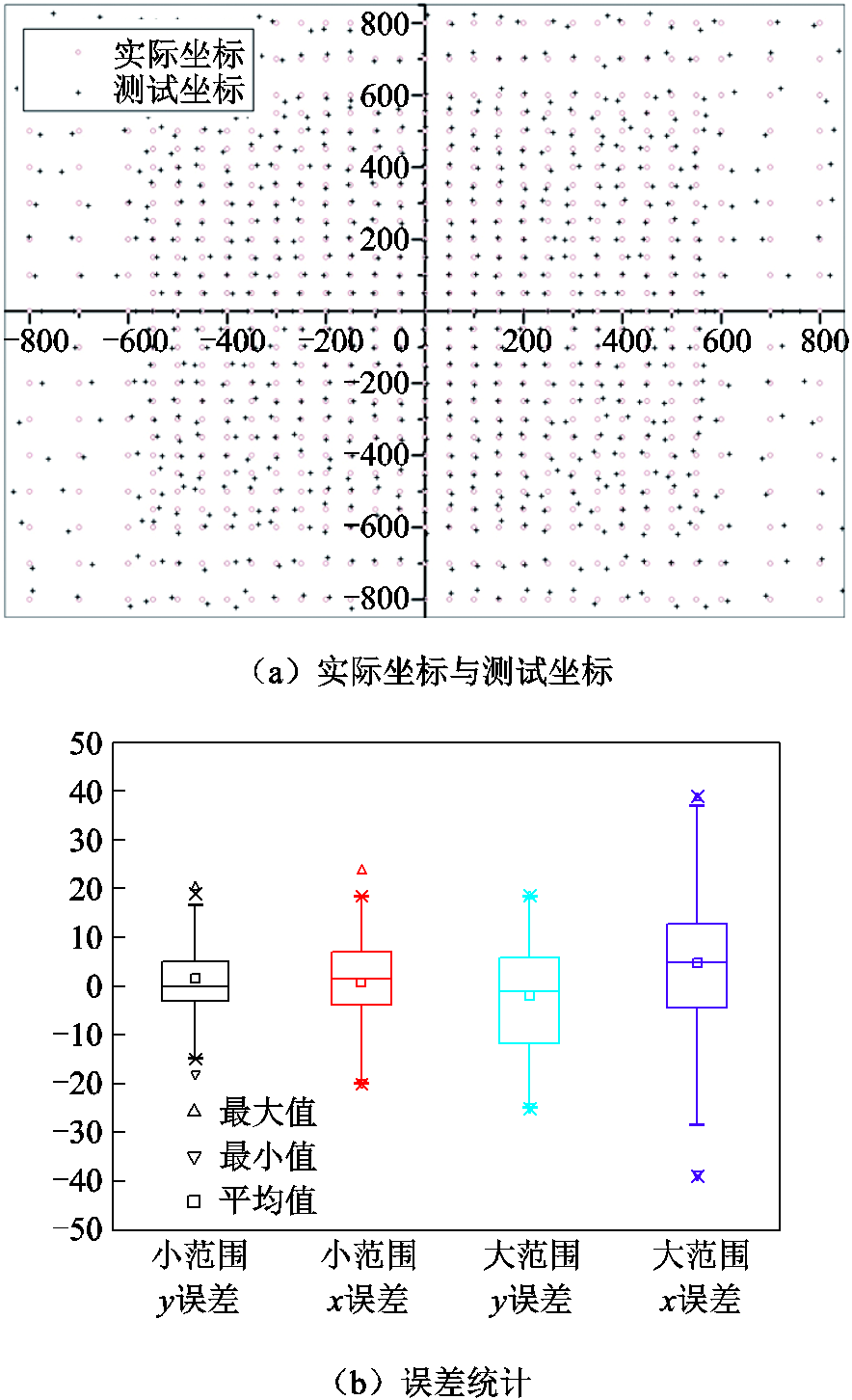
图14 接收端位置辨识结果
Fig.14 Measured results of the VA positioning system
在测试过程中,单次位置坐标的计算时间小于5 ms,可以认为定位具有实时性。在电动汽车停车路径上,系统的有效检测范围达到±800 mm:在±600 mm范围内,定位精度小于20 mm;在±600~±800 mm范围内,定位精度小于50 mm,定位准确率≥96%。该接收端位置辨识系统在停车路径引导、提升充电安全性与降低停车成本方面具有积极意义。
本文基于电磁定位基本原理,从磁场空间分布特征入手分析,得到现有电磁定位检测范围小的原因主要在于磁场的空间分布对称、非单调且小幅值。为提升定位范围,同时兼顾检测精度,本文设计了一种采用非中心对称线圈阵列结构的接收端大偏移范围位置检测装置,解决了磁场分布对称带来的位置辨识唯一性问题;提出了兼顾感应电动势幅值与空间利用率的位置检测线圈的设计准则,解决了磁场幅值小带来的检测精度低的问题;提出了基于行迹递推与曲线拟合相交思想的接收端二维位置坐标计算方法,解决了非单调对称磁场空间分布情况下非单射多值电压函数快速求解逆映射的问题,实现了大范围内接收端二维位置快速、精确的唯一性辨识。
实验中,本文首先分别验证了位置辨识装置与位置辨识算法的有效性,随后选取定位范围内规则分布的400个点位进行系统联合测试。实验结果表明,该方法的最大定位范围为±800 mm,在±600~±800 mm范围内,定位精度小于50 mm,定位准确率≥96%。
参考文献
[1] 刘耀, 肖晋宇, 赵小令, 等. 无线电能传输技术发展与应用综述[J]. 电工电能新技术, 2023, 42(2): 48-67.
Liu Yao, Xiao Jinyu, Zhao Xiaoling, et al. Development and application review on wireless power transmission technology[J]. Advanced Technology of Electrical Engineering and Energy, 2023, 42(2): 48-67.
[2] 徐先峰, 吴慧玲, 杨雄政, 等. 空间约束下电动汽车无线充电系统磁耦合结构优化[J]. 电工技术学报, 2024, 39(12): 3581-3588.
Xu Xianfeng, Wu Huiling, Yang Xiongzheng, et al. Optimization of magnetically coupled structure of wireless charging system for electric vehicles under space constraint[J]. Transactions of China Electro-technical Society, 2024, 39(12): 3581-3588.
[3] Birrell S A, Wilson D, Yang C P, et al. How driver behaviour and parking alignment affects inductive charging systems for electric vehicles[J]. Transportation Research Part C: Emerging Technologies, 2015, 58: 721-731.
[4] 崔淑梅, 宋贝贝, 王志远. 电动汽车动态无线供电磁耦合机构研究综述[J]. 电工技术学报, 2022, 37(3): 537-554.
Cui Shumei, Song Beibei, Wang Zhiyuan. Overview of magnetic coupler for electric vehicles dynamic wireless charging[J]. Transactions of China Electro-technical Society, 2022, 37(3): 537-554.
[5] 张献, 邢子瑶, 薛明, 等. 无线电能传输系统异物检测技术研究综述[J]. 电工技术学报, 2022, 37(4): 793-807.
Zhang Xian, Xing Ziyao, Xue Ming, et al. Overview of foreign object detection in wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 793-807.
[6] 程志远, 陈坤, 李东东, 等. 旋转式无线充电系统偏移特性研究[J]. 电工技术学报, 2021, 36(22): 4648-4657.
Cheng Zhiyuan, Chen Kun, Li Dongdong, et al. Research on offset characteristics of rotary wireless charging system[J]. Transactions of China Electro-technical Society, 2021, 36(22): 4648-4657.
[7] 李卓玥, 王春芳, 魏芝浩, 等. 电动汽车无线充电磁耦合器屏蔽层的优化设计[J]. 电源学报, 2023, 21(6): 144-151.
Li Zhuoyue, Wang Chunfang, Wei Zhihao, et al. Optimization and design of shielding layer in magnetic coupler for wireless charging of electric vehicles[J]. Journal of Power Supply, 2023, 21(6): 144-151.
[8] 刘尚合, 马贵蕾, 满梦华, 等. 电磁防护仿生研究进展[J]. 高电压技术, 2022, 48(5): 1750-1762.
Liu Shanghe, Ma Guilei, Man Menghua, et al. Research progress of electromagnetic protection biomimetics[J]. High Voltage Engineering, 2022, 48(5): 1750-1762.
[9] Hybrid-EV Committee. Wireless power transfer for light-duty plug-in/electric vehicles and alignment methodology: SAE J2954_202408[S]. SAE International, 2024.
[10] Electric vehicle wireless power transfer (WPT) systems- part 2: specific requirements for communication between electric road vehicle (EV) and infrastructure with respect to wireless power transfer (WPT) systems: IEC TS 61980-2[S]. IEC, 2019.
[11] Isozaki N, Chugo D, Yokota S, et al. Camera-based AGV navigation system for indoor environment with occlusion condition[C]//2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 2011: 778-783.
[12] Zhang Lin, Huang Junhao, Li Xiyuan, et al. Vision-based parking-slot detection: a DCNN-based approach and a large-scale benchmark dataset[J]. IEEE Transactions on Image Processing: a Publication of the IEEE Signal Processing Society, 2018, 27(11): 5350-5364.
[13] Suhr J K, Jung H G. Fully-automatic recognition of various parking slot markings in around view monitor (AVM) image sequences[C]//2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 2012: 1294-1299.
[14] Yu H Y, Chen J J, Hsiang T R. Design and implementation of a real-time object location system based on passive RFID tags[J]. IEEE Sensors Journal, 2015, 15(9): 5015-5023.
[15] Immaculate Mary G, Prithiviraj V. Test measurements of improved UWB localization technique for precision automobile parking[C]//2008 International Conference on Recent Advances in Microwave Theory and Applications, Jaipur, India, 2008: 550-553.
[16] Jo K, Lee M, Sunwoo M. Road slope aided vehicle position estimation system based on sensor fusion of GPS and automotive onboard sensors[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 250-263.
[17] Lewis A, Naserian M. Wireless charging system localization for electric vehicles using RSSI[J]. SAE International Journal of Passenger Cars - Electronic and Electrical Systems, 2015, 8(2): 340-343.
[18] 徐诗卉, 张欢, 姚辰, 等. 电动汽车无线充电系统的精确定位方法[J]. 仪表技术与传感器, 2020(11): 59-63.
Xu Shihui, Zhang Huan, Yao Chen, et al. Fine positioning method for wireless charging system of electric vehicles[J]. Instrument Technique and Sensor, 2020(11): 59-63.
[19] 方琪琦. 基于磁定位检测技术的电动汽车动态无线供电系统控制研究[D]. 北京: 北京交通大学, 2017.
Fang Qiqi. Research on control of dynamic wireless power supply system for electric vehicle based on magnetic positioning detection technology[D]. Beijing: Beijing Jiaotong University, 2017.
[20] Gao Yabiao, Duan Chen, Oliveira A A, et al. 3-D coil positioning based on magnetic sensing for wireless EV charging[J]. IEEE Transactions on Transportation Electrification, 2017, 3(3): 578-588.
[21] Zhang Bin, Chen Qianhong, Ke Guangjie, et al. Coil positioning based on DC pre-excitation and magnetic sensing for wireless electric vehicle charging[J]. IEEE Transactions on Industrial Electronics, 2021, 68(5): 3820-3830.
[22] Wang Wei, Zhang Cun, Wang Jiemin, et al. Multipurpose flexible positioning device based on electromagnetic balance for EVs wireless charging[J]. IEEE Transactions on Industrial Electronics, 2021, 68(10): 10229-10239.
[23] Tan Linlin, Li Chengyun, Li Jiacheng, et al. Mesh-based accurate positioning strategy of EV wireless charging coil with detection coils[J]. IEEE Transactions on Industrial Informatics, 2021, 17(5): 3176-3185.
[24] Babu A, George B. Sensor system to aid the vehicle alignment for inductive EV chargers[J]. IEEE Transactions on Industrial Electronics, 2019, 66(9): 7338-7346.
Abstract In the practical application of an electric vehicle (EV) wireless charging system, quite a few human-driven or driverless electric vehicles cannot accurately stop in the effective charging area without parking guidance. During charging process, the receiver misalignment beyond an acceptable range will cause severe problems such as low charging efficiency, excess electromagnetic radiation and rapid temperature rise of the system components. Since the beginning of industrialization of EV wireless charging technology, position detection (PD), as one of the three main auxiliary functions for wireless power transfer (WPT), has been widely researched by several researchers and institutes for years. By far, hundreds of PD methods have been proposed, but there are still many problems to positioning accurately within a wide range. Based on electromagnetic (EM) position detection method, this paper proposed an accurate PD system applied to large misalignment range for EV wireless charging system. By reasonable design of the positioning coil array and optimized calculation of the induced voltages, it gets the position coordinates of the receiver in widediscrete two-dimensional space accurately and effectively.
Difficulties for the application of EM position detection to a large range stem from the low magnitude and symmetric spatial distribution of the magnetic field. To address the problem, a PD device using a triple coil array was proposed. The coil array was fixed on board, quite under the receiver coil, with the outer contour the same as the vehicle assembly (VA) for making full use of the installation space. Small quantities of the PD coils together with the design of coil geometric parameters based on effective magnetic flux area achieve a sufficient induced voltage magnitude. Non-centrosymmetric arrangement of the PD coils and the asymmetric spatial mapping relationship from each PD coil to VA guarantee the one-to-one correspondence between the VA position and the induced voltage vector. During positioning process, low power excitation was added to the coil of the ground assembly (GA), and the PD coil array moves with VA.
Before positioning, fingerprint database should be set up, so that the fitted induced voltage curves can be obtained. Position detection is a process of finding the space coordinates corresponding to the real-time obtained voltages on the fitted curves based on one-to-one correspondence relationship. In fact, those fitted curves are non-monotonic and therefore have no inverse functions. As the car moves in a straight line, the real-time voltages are regarded as three straight lines in coordinate system. By intersecting them with three corresponding fitted curves, three spatial coordinate sets can be obtained, and the final result lies in the intersection set of the three. As the car moves in a two-dimensional area, the first step is the same as the car going straight. What’s more, induced voltages at a previous sampling time should be used to calculate the voltage variation rates. Taking the fingerprint database as reference, the calculated voltage variation rates can help to obtain the spatial coordinate of another dimension.
Based on WPT3 Z2 system, a PD system prototype was established and integrated. 400 points were tested within ±800 mm at the center of the GA. The single detection process delay is less than 5 ms. The positioning precision is 20 mm within ±600 mm and 50 mm between ±600 mm to ±800 mm, with the positioning accuracy rate more than 96%. From the result, it is feasible for integration of EM detection with other PD methods by data fusion technology to achieve a continuous accurate position detection at multiple spatial scales.
Keywords:Wireless power transfer, position detection, electromagnetic induction, electric vehicle
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.231670
国家自然科学基金青年科学基金(52307007)和黑龙江省博士后基金面上项目(LBH-Z22185)资助。
收稿日期 2023-10-09
改稿日期 2024-01-17
孙 天 男,1995年生,博士研究生,研究方向为无线电能传输技术与磁耦合机构设计方法研究。E-mail:21B306004@stu.hit.edu.cn
宋贝贝 男,1993年生,助理教授,研究方向为电动汽车及电机的无线电能传输技术。E-mail:songbei@hit.edu.cn(通信作者)
(编辑 郭丽军)