图1 脉冲负载与推进负载功率特性
Fig.1 Pulsed loads and propulsion loads power characteristics
摘要 高频高峰值脉冲负载对具有弱惯量特性的船舶电力系统呈现较大的功率冲击影响,严重时会造成船舶发电机组振荡停机。针对这一问题,该文首先建立典型脉冲负载的数学模型,研究脉冲负载功率特性及其对船舶电力系统冲击机理。根据研究结果,提出采用超级电容冲击平抑装置平抑脉冲功率。其次,通过分析虚拟直流电机(VDG)运行机理,确定通过VDG控制提升双向DC-DC变换器惯量的可行性。基于以上研究,推导双向DC-DC变换器的小信号模型及系统传递函数,分析虚拟转动惯量及虚拟阻尼对平抑装置稳定性的影响。然后,提出一种适用于脉冲负载稳态运行和暂态突变的平抑装置控制策略。最后,基于RT Box 3半实物仿真平台,搭建了具有平抑装置的船舶电力系统模型,验证了所提控制策略的有效性。
关键词:船舶电力系统 脉冲负载 功率平抑 超级电容 虚拟直流电机
我国船舶建设正向科技化、智能化、电子化、信息化方向不断发展,基于电力电子的先进设备广泛应用于现代船舶当中。各种探测设备由于其工作特点呈现高频高峰值脉冲特性,该类负载的周期、占空比及峰值功率随着脉冲负载实际工况不同,将在较宽范围内变化[1-3],其运行时会对具有弱惯量特性的船舶电力系统造成冲击,严重时甚至造成船舶发电机组脱网停机[4-6]。因此,需要对船舶电力系统中高频高峰值脉冲负载的平抑措施进行研究。
在脉冲负载冲击平抑策略的研究中,现有文献设计目标主要是针对雷达型负载展开。文献[7]分析了脉冲负载对柴油发电机组动态运行特性的影响,为平抑策略的设计提供了思路。文献[8]依据等效电阻模型建立了脉冲负载的等效电路模型和数学模型,为其平抑电源参数选取提供了设计依据。文献[9-10]针对脉冲负载,设计了一种新型直流船舶电力系统拓扑结构,保证了脉冲负载稳态条件下的正常运行。文献[11]研究了影响船舶电力系统直流供电电源动态响应的关键因素,并提出了相应的功率平抑策略。文献[12]将脉冲负载与DC-DC变换器两者的开关频率特性结合分析,推导了变换器全过程状态方程,并由该方程选取了电感、电容的最优参数。文献[13]提出了一种前级Buck-后级Boost的船舶大功率脉冲负载抗冲击供电系统拓扑,该结构降低了脉冲负载功率冲击并抑制了系统电流谐波。文献[14-15]分析了脉冲负载直流供电电源支撑电容的容值对平抑性能的影响,并通过搭建仿真模型进行了对比验证。以上研究主要采用增大支撑电容容量的方式提高直流电源对脉冲负载的平抑效果,但无法同时满足多工况脉冲负载的平抑需求。同时,该方法无法解决脉冲负载高峰值低占空比时对柴油发电机组的冲击影响。
围绕上述问题,已有研究提出采用储能单元与功率开关器件实现对脉冲负载冲击影响的主动平抑策略。文献[16]提出了一种舰船储能系统综合性能评价函数,并给出了基于该函数的储能优化配置方案。文献[17]设计了一种双向AC-DC变换器与储能电容相结合的电流补偿器,提出了其电流补偿控制方法,使得脉冲功率在交流电源端被平抑为平均功率。但是该方法并不适用于雷达型脉冲负载。文献[18]提出了采用超级电容作为储能元件通过串并联的方式构成大容量脉冲功率储能系统,从功率和能量的角度对容量参数进行设计。
在双向DC-DC变换器的控制策略研究中,文献[19]设计了一种自适应反步控制器,通过使用观测器在线补偿扰动增强了系统的鲁棒性。文献[20]提出了一种双向DC-DC变换器非线性控制算法,减小了系统超调及稳态误差。文献[21]基于直流母线电压波动问题设计了一种二次规划算法对混合储能系统功率进行合理分配,减小了调压成本。
现有文献主要围绕功率平抑电路的稳态模型进行研究,并未考虑脉冲负载启停及工况变化时对船舶电力系统的影响。然而,对于船舶电力系统而言,后者会造成更大冲击及危害,需要对该问题进行深入研究。因此,本文围绕脉冲负载对船舶电力系统不同形式的冲击影响平抑方法进行了研究。首先,建立了脉冲负载数学模型并推导了其对船舶电力系统严重功率冲击机理。其次,设计了一种基于超级电容冲击平抑装置的船舶电力系统架构,并通过理论推导验证了其对脉冲负载稳态运行时的平抑能力。然后,通过分析了虚拟直流电机(Virtual DC Generator, VDG)运行机理及参数对系统动态性能的影响,进而提出采用基于VDG的控制或者策略平抑脉冲负载暂态冲击。最后,提出了一种适用于脉冲负载暂态变化与稳态运行时的脉冲功率平抑策略,搭建了RT Box 3半实物仿真平台,验证了所提控制策略的有效性。
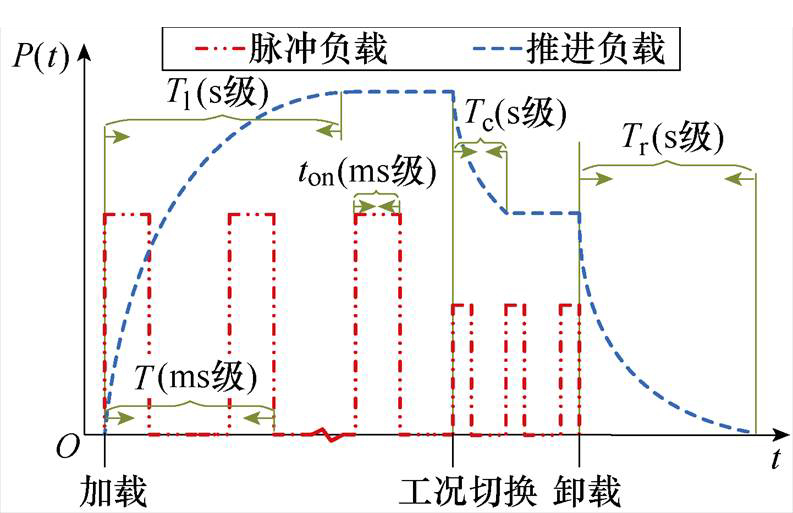
电磁弹射装置、雷达、通信设备、深海探测仪、电磁炮等典型高频高峰值脉冲负载广泛搭载于现代船舶电力系统中[22-23]。本文以雷达型脉冲负载为例,探究其对船舶电力系统的冲击机理并设计相应脉冲平抑策略。如图1所示为电推进负载与脉冲负载功率特性,图1中,Tl、Tc及Tr分别定义为加载时间、切换时间和卸载时间。由图1可见,不同于推进负载在启停或工况切换时的长时间(s级)暂态响应过程及功率恒定的稳态运行过程,脉冲负载在加卸载或工况切换时会瞬时达到其峰值功率,随后呈现出周期为ms级,峰值功率为MW级的连续脉冲波动。因此,对其冲击功率的平抑应从其暂态突变和稳态运行两方面考虑。
图1 脉冲负载与推进负载功率特性
Fig.1 Pulsed loads and propulsion loads power characteristics
脉冲负载及其供电电路拓扑如图2所示,雷达型脉冲负载由多个脉冲功率单元组成[24-25]。每个脉冲功率单元的工作周期通常为10~100 ms[9],功率峰值Pp、脉冲时间ton则与其实际工况相关,具体关系[26]为
 (1)
(1)
 (2)
(2)
式中,R为脉冲负载作用距离;Gt为脉冲功率单元增益;s 为目标散射面积;Ar为脉冲功率单元接收面积;Lk为系统损耗;Smin为最小可检测干扰比;Ton为脉冲功率单元法向脉冲时间;a 、b 分别为雷达型脉冲负载工作俯角、仰角。

图2 脉冲负载及其供电电路拓扑
Fig.2 Pulsed loads and its power supply circuit topology
由于雷达型脉冲负载对目标搜索或跟踪时,目标距离,目标俯角、仰角等参数充满随机性,因此脉冲负载功率峰值Pp、脉冲时间ton、占空比Dp(通常为12.5%~33.3%)[9]将在较宽范围内变化。为使本文工作具有代表性,分别以文献[26-27]所述脉冲负载峰值功率设置了工况1~工况3作为脉冲负载典型工况见表1。
表1中,工况1为文献[27]所述美军霍华德·洛伦兹号搭载的脉冲负载在探测距离为5 000 km时,按式(1)及式(2)计算所得模拟工况,该型船舶搭载了4台额定功率为5.5 MW的MaK12M32C柴油发电机,脉冲负载平均功率占船舶实际容量的54.5%。工况2为本文设定工况,目的是使脉冲负载典型工况更具一般性。
表1 高频高峰值脉冲负载典型工况
Tab.1 Typical operating conditions of high-frequency and high-peak pulsed loads

工况ton/msDp(%)Pp/MW 12~1010~2548 24~102~5017 30.1~15~306
图2中,ubus为直流母线电压,iLp为电感电流,uCp、ihp分别为脉冲负载端电压及电流,Lp、RLp、Cp分别为Boost电路电感、电阻及电容,Dpt、Dp1、Dp2、Dp3分别为Boost电路及脉冲负载三种工况下占空比,Rp1、Rp2、Rp3为脉冲负载三种工况下等效电阻。
考虑开关管VT1及VT2的开关状态,以工况1为例,可得如图3所示的四种工作模态。
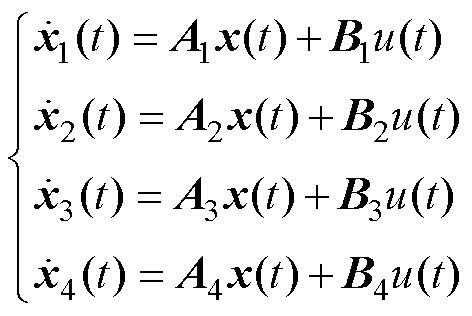
当以uCp及iLp为状态变量时,系统状态矢量x(t)及输入u(t)可表示为
 (3)
(3)
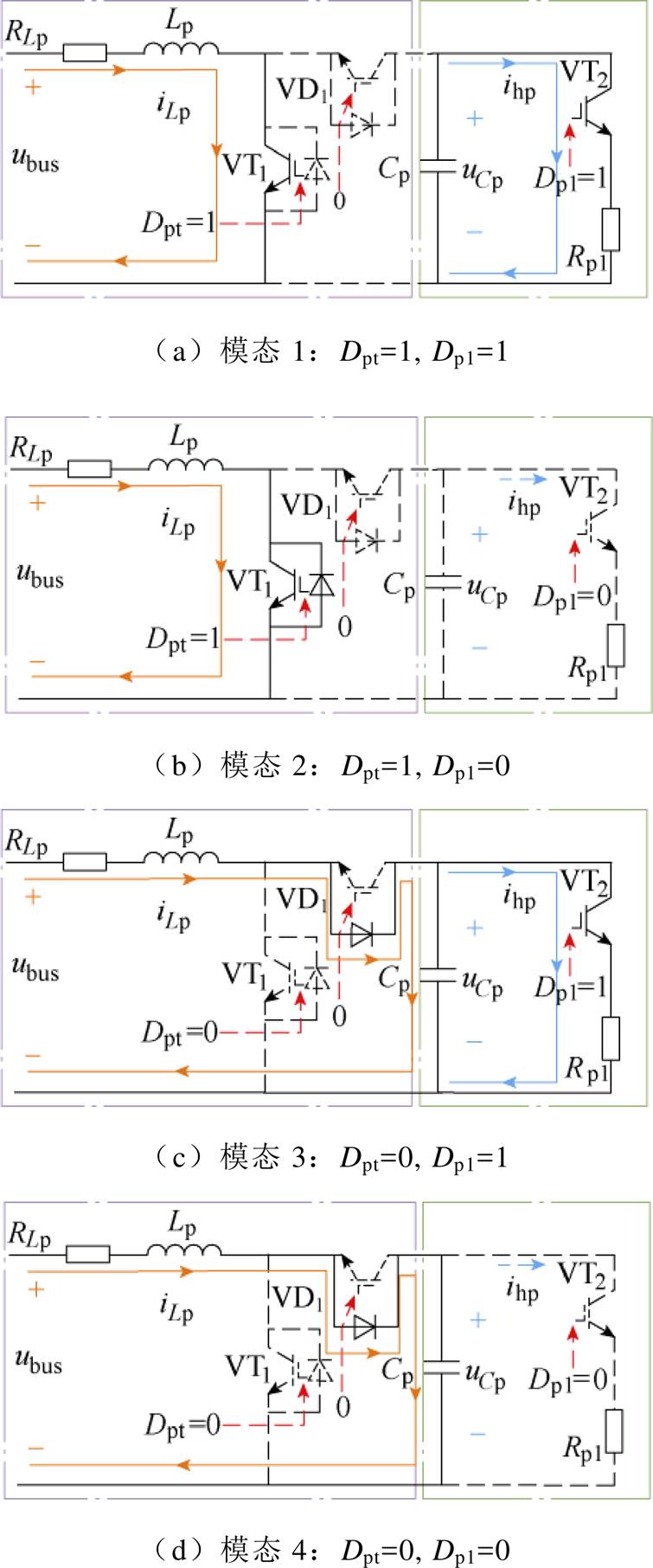
图3 脉冲负载整体拓扑运行模态
Fig.3 Pulsed loads overall topology operating mode
 (4)
(4)
由于VT1及VT2开关频率足够高,则对于任一状态变量,其瞬时值或导数瞬时值都应近似于其单开关周期内平均值,即
 (5)
(5)
 (6)
(6)
式中,TS1及TS2分别为VT1及VT2的开关周期。基于式(5)、式(6)可得
 (7)
(7)
式中,dpt、dp1分别为Dpt、Dp1对应的时变占空比函数; =1-dpt;
=1-dpt; =1-dp1。
=1-dp1。
根据开关管状态,可知 、
、 、
、 、
、 分别对应图3所示模态1~4的状态变量导数值。由图3可得四种模态下系统状态方程为
分别对应图3所示模态1~4的状态变量导数值。由图3可得四种模态下系统状态方程为
 (8)
(8)
其中
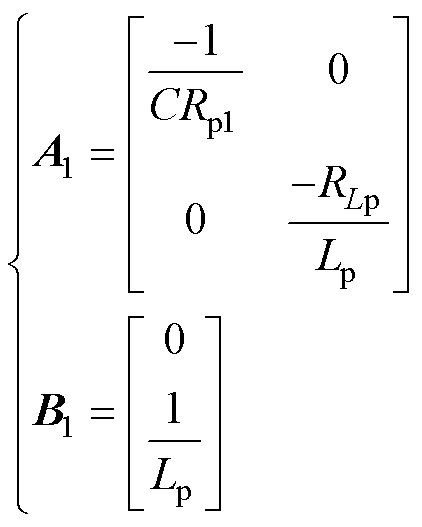 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
将式(8)~式(12)代入式(7)进行状态空间平均,可得系统状态方程为
 (13)
(13)
其中
 (14)
(14)
 (15)
(15)
将式(13)展开可得脉冲负载整体及其供电电路的非线性模型为
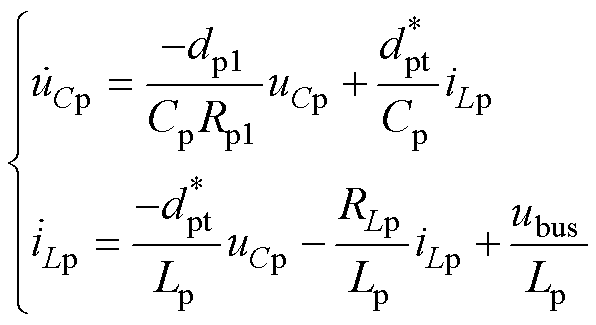 (16)
(16)
基于式(16),将 及
及 置零可得系统静态工作点为
置零可得系统静态工作点为
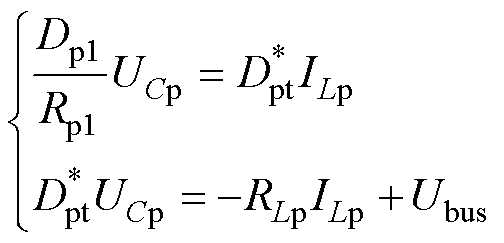 (17)
(17)
由式(16)、式(17)可得系统雅各比矩阵为
 (18)
(18)
由式(18)可得特征方程为
 (19)
(19)
式(19)是基于工况1得出的,但将其中参数Dp1、Rp1改变成工况2、3对应数值也适用。
因此,基于式(19)并根据表1脉冲负载参数及附录所示Boost电路参数,可得特征根轨迹如图4所示。由于在三种工况下,特征值都为一对共轭复数,为简化表达,图中只给出其中一条特征根轨迹。由图可见,脉冲负载在不同工况下对其供电电路的影响程度并不相同。工况1下,随着Dp1增大,系统稳定裕度先增大后减小;工况2与工况1具有相似结论;工况3下整个系统位于不稳定区域,且随着Dp3增大稳定裕度下降。因此,对脉冲负载平抑策略的设计需考虑不同工况下的平抑性能。

图4 不同工况下脉冲负载对系统稳定性影响
Fig.4 Impact of pulsed loads on system stability under different working conditions
此外,将式(16)做变换得
 (20)
(20)
将式(20)中的上式代入下式,并考虑Boost电路采用双闭环控制,近似认为电感电流及电容电压导数为0,有
 (21)
(21)
由式(21)可知,ubus中含有与脉冲负载运行参数(Rp1、dp1)相关的扰动分量,且该扰动分量可以看成振荡的电感电流iLpw与电感内阻RLp的乘积。若该电流分量完全由柴油发电机提供,则会造成柴油发电机电磁转矩脉动,严重时使其振荡停机。因此,需要设计相应平抑装置补偿该扰动电流分量,在保证直流母线电压稳定的同时,也能满足脉冲负载的多工况运行情景。
基于上述分析,本文选择以超级电容冲击平抑装置补偿扰动电流进而平抑高频高峰值脉冲负载冲击,并设计了如图5所示的船舶电力系统架构。
该架构由以下几部分组成(图中省略了经背靠背整流器接入直流母线的推进负载):①柴油发电机组为脉冲负载供能,其稳定运行对于整个船舶电力系统具有重要意义;②交流母线;③软起动及熔断保护电路;④24脉波整流电路:能减小交流侧电流谐波,采用二极管不控整流提升了经济性;⑤直流母线:电压稳定是保证脉冲负载,推进负载稳定运行的前提;⑥多重Boost供电电路:接入直流母线,推进负载经背靠背整流器接入直流母线;⑦多重超级电容冲击平抑装置通过补偿脉冲负载扰动电流进而平抑其冲击,保证直流母线电压波动在合理范围内。由图可见,平抑装置共由m重双向DC-DC组成,其中ise为平抑装置充电电流,iLe1~iLem及uCs1~uCsm分别为m重双向DC-DC电感电流及m个超级电容端电压,Le1~Lem及Re1~Rem为m重双向DC-DC电感及其寄生电阻,Cs1~Csm为m个超级电容。

图5 基于超级电容冲击平抑装置的船舶电力系统架构
Fig.5 Ship power system architecture based on supercapacitor impact suppression device
本节所有大写参数均为图5所示瞬时值对应的静态工作点绝对值。同时,以第一重储能装置为例设计相应参数,其余重电路与第一重完全相同。设超级电容冲击平抑装置中双向DC-DC工作于电流连续导通模式(Continuous Conduction Mode, CCM),则Ise与ILe1有
 (22)
(22)
式中,Det为Boost模式下双向DC-DC占空比。设定超级电容最大放电功率为最大峰值功率一半,则ILe1取值为
 (23)
(23)
式中,Ppl为表1中脉冲负载的最大峰值功率;Detl为超级电容放电至200 V时占空比;ILn、ICsn分别为电感电流额定值和超级电容额定充电电流,本文令两者最小值为1 kA,Ubus=500 V。代入数据可得m≤120,本文取m=120。
超级电容总容值Cst可计算为
 (24)
(24)
式中,UCh及UCl分别为超级电容满充电压及最低放电电压,分别取400 V与200 V;ton、Pp分别取12 ms及48 MW。代入数据得Cs1=80 mF,本文取100 mF。
电感电流纹波率h 可表示为
 (25)
(25)
式中,DiLe1为电感电流纹波;Ppa为脉冲负载平均功率;fs为开关频率。若工程上电感电流纹波要求为 h≤hL,则由式(25)有
 (26)
(26)
式中,Ppa=6 MW;hL≤10%;同时,由于电容电压范围在400~200 V之间,即Det范围为0.2~0.6,则设Det=0.33使Det(1-Det)2取最大值进而保证裕量充足,设fs=10 kHz,代入数据得Le1≥ 0.86 mH,本文取Le1=1.2 mH。
同理,Cbus取值也以其电压纹波作为限制条件。设hC≤8%,Ppa=12 MW,Det取最大值0.6。代入数据至式(27)可得Cbus≥1.2 mF,本文取2.2 mF。
 (27)
(27)
本节所有参数已全部整理至附表2中。
为简化分析,以图6所示单重拓扑推导超级电容冲击平抑装置的冲击平抑机理。图6中,ice为平抑装置补偿电流,ig为发电机侧输入电流,Dek为双向DC-DC在Buck模式下占空比。

图6 超级电容电流补偿模型
Fig.6 Supercapacitor current compensation model
图6中,双向DC-DC采用互补PWM,即
 (28)
(28)
本文以det为占空比函数,采用与1.2节相同的建模方式得出超级电容冲击平抑装置数学模型如式(29)所示,超级电容忽略了串并联内阻。
 (29)
(29)
将式(29)状态变量导数置零,得其静态工作点为
 (30)
(30)
由式(30)可知,当 >UCs/Ubus时,双向DC- DC为Buck模式;反之,为Boost模式。对节点1,由KCL不难得出
>UCs/Ubus时,双向DC- DC为Buck模式;反之,为Boost模式。对节点1,由KCL不难得出
 (31)
(31)
式(31)说明,扰动电流iLpw可完全由超级电容提供,柴油机只需向直流电网输出稳态电流ig。将式(16)与式(30)、式(31)联立可得加入超级电容冲击平抑装置后的系统模型为
 (32)
(32)
不难得出此时系统特征方程为
 (33)
(33)
依据式(33),得出典型工况下系统特征根轨迹如图7所示。

图7 加入超级电容冲击平抑装置后系统特征根轨迹
Fig.7 System characteristic root locus after adding supercapacitor impact suppression device
由图7可见,加入超级电容冲击平抑装置补偿扰动电流维持直流母线电压稳定时,系统在三种典型工况下都具有良好的稳定裕度。
在冲击平抑装置对扰动电流进行补偿后,ig及ubus都近似恒定,因此在柴油机侧,脉冲负载将呈现出与恒功率运行的推进负载相同的特性。但考虑到脉冲负载的起停及工况切换仍会对柴油机造成巨大冲击,仍需对其暂态平抑策略进行设计。
为了解决脉冲负载在多种典型工况之间切换时造成的母线电压波动问题,本文设计了基于VDG的冲击平抑控制策略。
图8为双向超级电容冲击平抑装置中双向DC- DC与直流发电机的电路模型,图中设双向DC-DC工作在Boost模式,并以此为例说明VDG控制对双向DC-DC暂稳态性能的影响。

图8 双向DC-DC与直流发电机数学模型对偶关系
Fig.8 Duality relationship between bidirectional DC-DC converter and DC generators
图8中,w 为直流发电机转子机械角速度,J为转动惯量,Tm为机械转矩,e为发电机电动势,Ls与Rs分别为电枢电感及电阻。基于图8,直流发电机数学模型为
 (34)
(34)
 (35)
(35)
式中,B为阻尼系数;wN为额定转速。从式(29)及式(34)、式(35)可知,双向DC-DC与直流电机在数学模型上具有对偶关系,因此得出如图9所示的VDG控制策略。由图9及式(21)可知,当工况切换即Rp1突变时,母线电压波动量会立即突增,即图9中直流母线电压误差量Dubus=ubus-Ubus将增大,这对应于VDG控制中转速误差量Dw = w-wN变化。而转速变化经VDG转子方程和电压方程被赋予了直流电机的阻尼和惯性特征,在转动惯量和阻尼作用下,转速w 会缓慢变化并恢复至下一工况稳态,即直流母线电压ubus也会缓慢变化,直至柴油机组调节至下一工况额定功率。

图9 超级电容冲击平抑装置的VDG控制策略
Fig.9 VDG control strategy for supercapacitor impact suppression device
以双向DC-DC工作于Boost模式为例,推导虚拟转动惯量J及虚拟阻尼B对超级电容冲击平抑装置稳定性影响。将补偿电流ice表示为
 (36)
(36)
将式(36)代入式(29)中,并在其静态工作点分离小信号量,有
 (37)
(37)
则Boost模式下双向DC-DC传递函数为
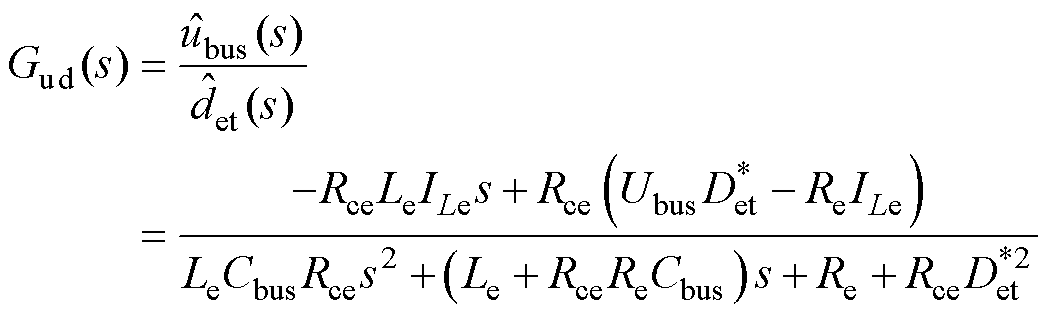 (38)
(38)
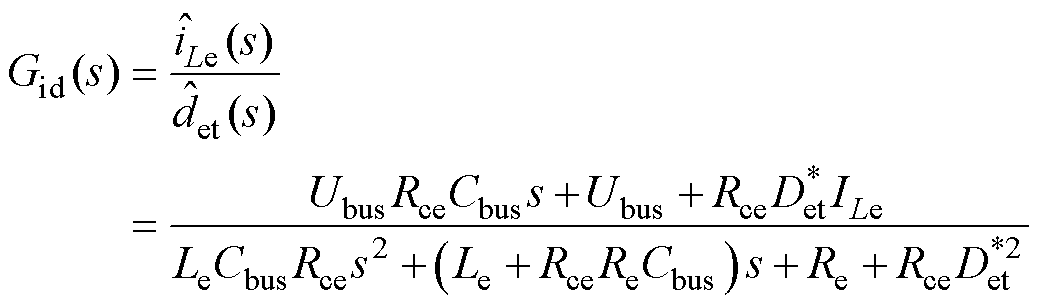 (39)
(39)
联立式(34)、式(35)可得VDG传递函数为
 (40)
(40)
由式(38)~式(40),并忽略扰动量和补偿量可得到双向DC-DC简化控制框图如图10所示。Buck模式下的传递函数及简化控制框图与Boost模式类似,限于篇幅,本文不再赘述。
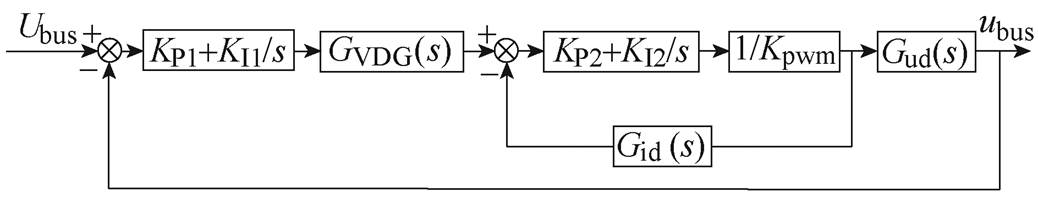
图10 Boost模式下变换器简化控制框图
Fig.10 Simplified control block diagram of converter in Boost mode
图10中,令外环内环PI控制器传递函数分别为GPI1、GPI2,则Boost模式下内环传递函数为
 (41)
(41)
因此,加入VDG后Boost传递函数为
 (42)
(42)
由式(42)可以得到VDG控制下的超级电容冲击平抑装置传递函数的特征方程为
 (43)
(43)
式中,Num(s)、Den(s)分别为传递函数GPI1(s)、GIL(s)、Gud(s)乘积的分子、分母。为了研究虚拟转动惯量J对系统性能的影响,可以由式(43)分别构建以J与B为增益的等效开环传递函数为
 (44)
(44)
 (45)
(45)
代入2.2节所得各参数数据,并绘制J、B的参数根轨迹如图11所示。由该图可知,超级电容脉冲平抑装置在J与B由零向正无穷变化的过程中极点始终位于实轴左侧,即系统始终稳定。图11a中,5条根轨迹总体趋势是随着J增大逐渐靠近实轴,这说明增大J可以增加系统响应时间;而图11b则具有与前者相反的结论,即随着B增大,5条根轨迹逐渐远离实轴,系统响应变快。
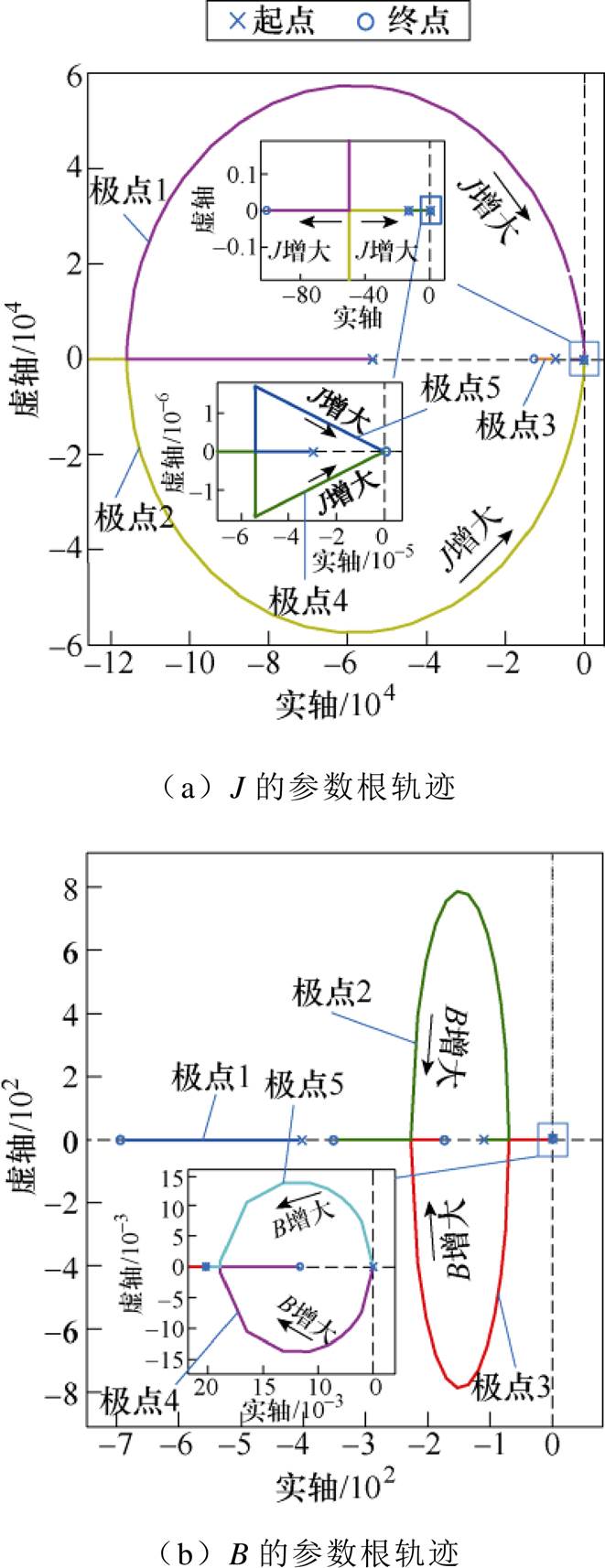
图11 VDG控制下冲击平抑装置根轨迹
Fig.11 Root locus diagram of impact suppression device under VDG control
图12为J及B从零增大时VDG控制下系统单位阶跃响应曲线簇。由图12可知,当J增大时,系统从过阻尼向欠阻尼过渡,其稳态时间变长,超调增大,即系统惯性增加;而当B逐渐增大时,系统则从欠阻尼向过阻尼转变,其响应变快,超调量减少。这与根轨迹的分析一致,同时意味着在实际工程中可以通过改变J与B的值,使双向DC-DC变换器获得不同惯性与阻尼。
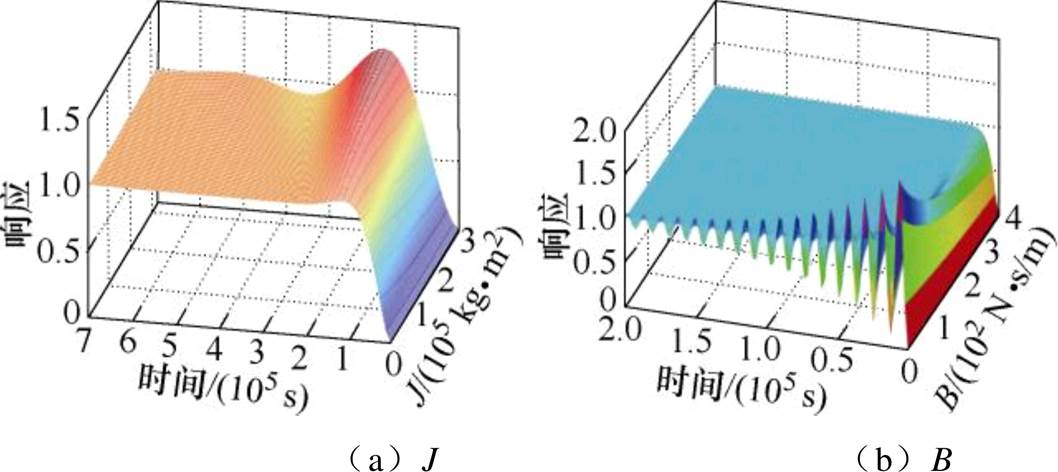
图12 VDG控制下系统阶跃响应曲线簇
Fig.12 System step response curves cluster under VDG control
基于上述分析,本文设计了如图13所示的超级电容冲击平抑装置充放电控制策略,利用超级电容的快速动态响应能力以及VDG虚拟转动惯量与虚拟阻尼可调的特点,让超级电容对脉冲负载进行动态补偿。由图13可知,m重超级电容冲击平抑装置根据直流母线电压ubus所处范围分为三种控制模式:当ubus低于下限阈值ul时,储能系统采用模式一控制;当ubus位于下限阈值ul和上限阈值uh之间时,储能系统采用模式二控制;当ubus高于上限阈值uh时,储能系统采用模式三控制。
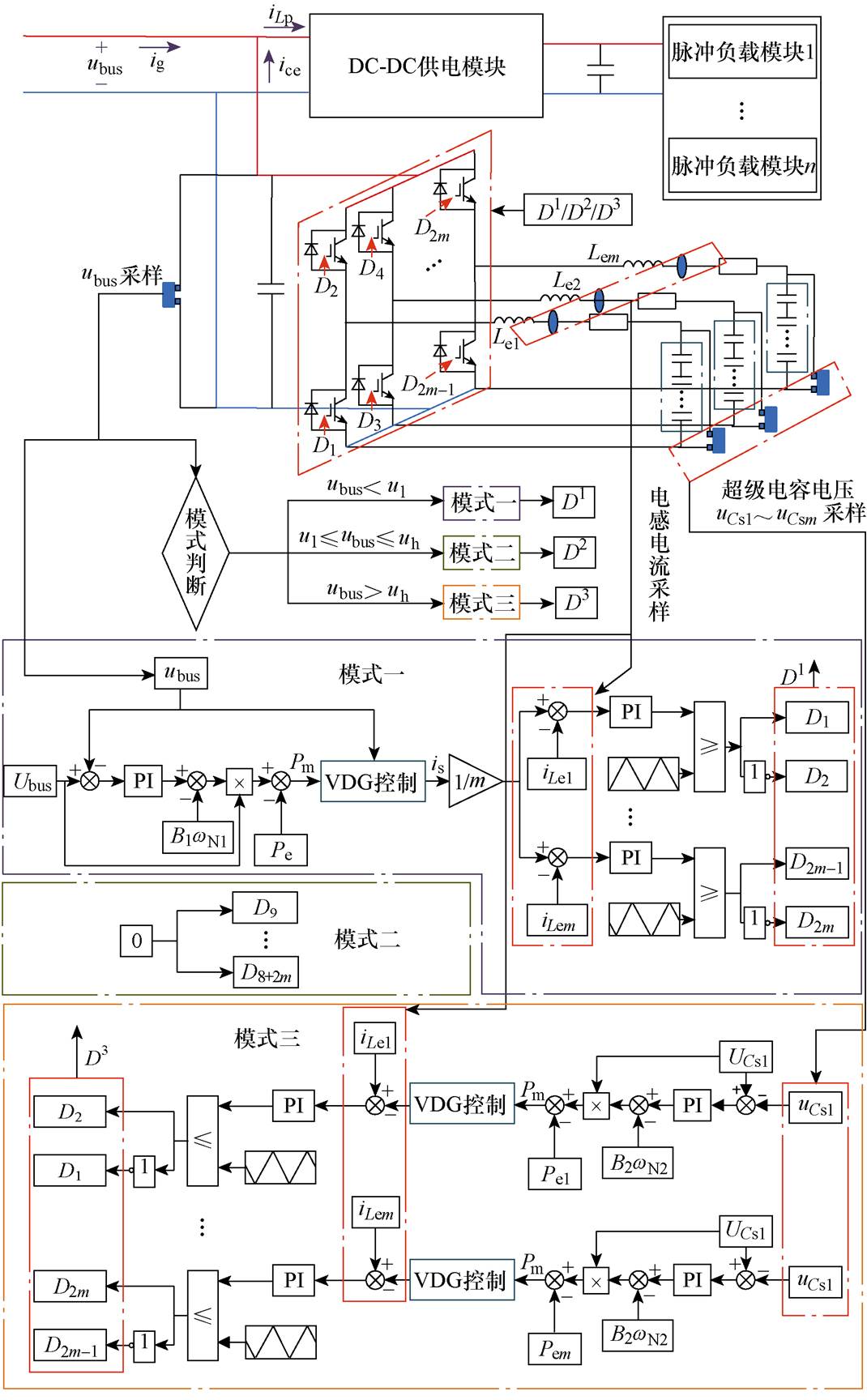
图13 超级电容冲击平抑装置的协调控制策略
Fig.13 Coordinated control strategy for supercapacitor impact suppression device
采用所提策略,可通过改变电磁功率给定值Pe、虚拟转动惯量J及虚拟阻尼B调节系统动态响应能力。当脉冲负载工况切换时,通过监测直流母线电压变化,VDG控制下的超级电容冲击平抑装置充/放电功率会立即增大并逐渐降低至0。而模式二的过渡区设计可以避免控制器的误动作,防止超级电容过量充放电导致直流母线电压过度抬升或跌落,同时也避免超级电容频繁充放电而导致使用寿命降低。
此外,本文所提平抑策略的补偿电流ice与电容容值Cs完全解耦,其补偿电流受双向DC-DC变换器控制,因而超级电容可在宽电压范围内运行。而在直流母线并联大电容的传统冲击平抑策略,其补偿电流与电压波动存在
 (46)
(46)
式中,Dt为电容充/放电时间。由式(46)可知,母线电压波动量Dubus与Cs呈负相关,而为了满足工况切换时的大电流充放电,只能增加电容容值。对于多工况随机运行的高频高峰值脉冲负载,若采取传统冲击平抑策略,其母线电容的容值需按照最大功率工况加载或卸载时的能量需求选取,而有限的船舶空间及严格的船舶自重要求又限制了大体积、大容值的母线电容装船。
而采用本文所提平抑策略后,脉冲负载在直流母线侧将表现出与推进负载相同的暂、稳态功率特性,因而可直接采用适用于推进负载的柴油发电机控制策略,无需对发电机控制器进行额外设计。
由于高频高峰值脉冲负载供电电路的复杂性及其功率达MW级,本文选用RT Box 3搭建了如图14所示的硬件在环半实物仿真平台,仿真采样频率为20 kHz。其中,RT Box 3与PLECS平台集成,在PLECS中搭建的系统模型被转换为C代码在RT Box 3及TMS320F283790中运行,前者模拟系统功率电路,后者模拟控制电路。通过PLECS与RT BOX 3的交互,将仿真结果从PLECS示波器中导出。系统参数见附表2。
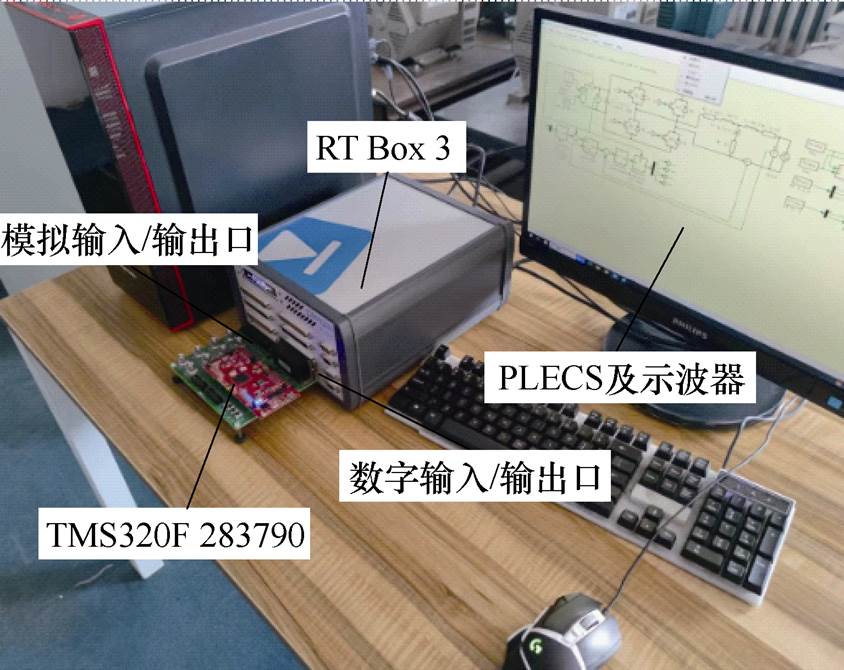
图14 硬件在环半实物仿真平台
Fig.14 Hardware-in-the-loop simulation platform
根据表1参数,对传统被动平抑策略及本文所提主动平抑策略进行仿真对比分析。脉冲负载在1~6 s时工作在工况1(重载),其峰值功率为48 MW,周期为40 ms,占空比为25%;在6 s时切换为工况2(轻载),切换后脉冲负载峰值功率为17 MW,周期为20 ms,占空比为50%。仿真结果如图11~图20所示。其中,图15、图16分别为两种平抑策略下脉冲负载瞬时功率、端电压对比波形;图17~图19分别为两种平抑策略下柴油发电机转速、线电压及有功功率对比波形;图20为本文所提控制下超级电容电压波形。

图15 两种平抑策略下脉冲负载瞬时功率
Fig.15 Instantaneous power of pulsed loads under two suppression strategy

图16 两种平抑策略下脉冲负载端电压
Fig.16 Voltage at the terminal of pulsed loads under two suppression strategy
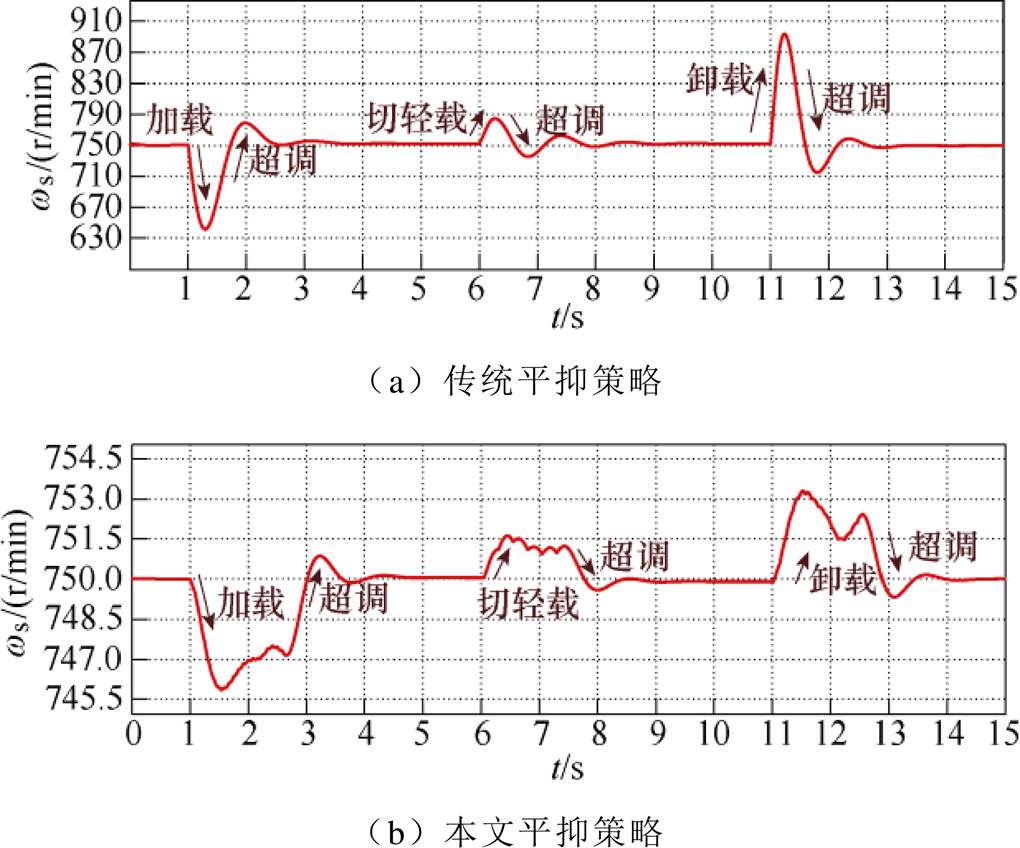
图17 两种平抑策略下发电机转速
Fig.17 Generator speed under two suppression strategy
如图15、图16所示,传统平抑策略与本文平抑策略相比动态响应更快,但是对脉冲负载功率冲击平抑能力不足。传统平抑策略下,脉冲负载重载时稳态功率波动范围为20~72 MW,最大值远超脉冲负载额定功率48 MW,其端电压在540~1 020 V之间振荡;轻载时稳态功率波动范围为14~20 MW,端电压波动为736~870 V。尽管本文平抑策略下系统稳态时间变长,但是由图15b、图16b可见,脉冲负载功率波动和端电压波动范围在重载和轻载时都远小于传统控制,在重载时其功率、端电压波动范围分别为42~48 MW及776~826 V;轻载时分别为16.5~17 MW及794~806 V。这说明本文所提平抑策略对稳态时的脉冲冲击具有良好的平抑效果。

图18 两种平抑策略下发电机线电压
Fig.18 Generator line voltage under two suppression strategy
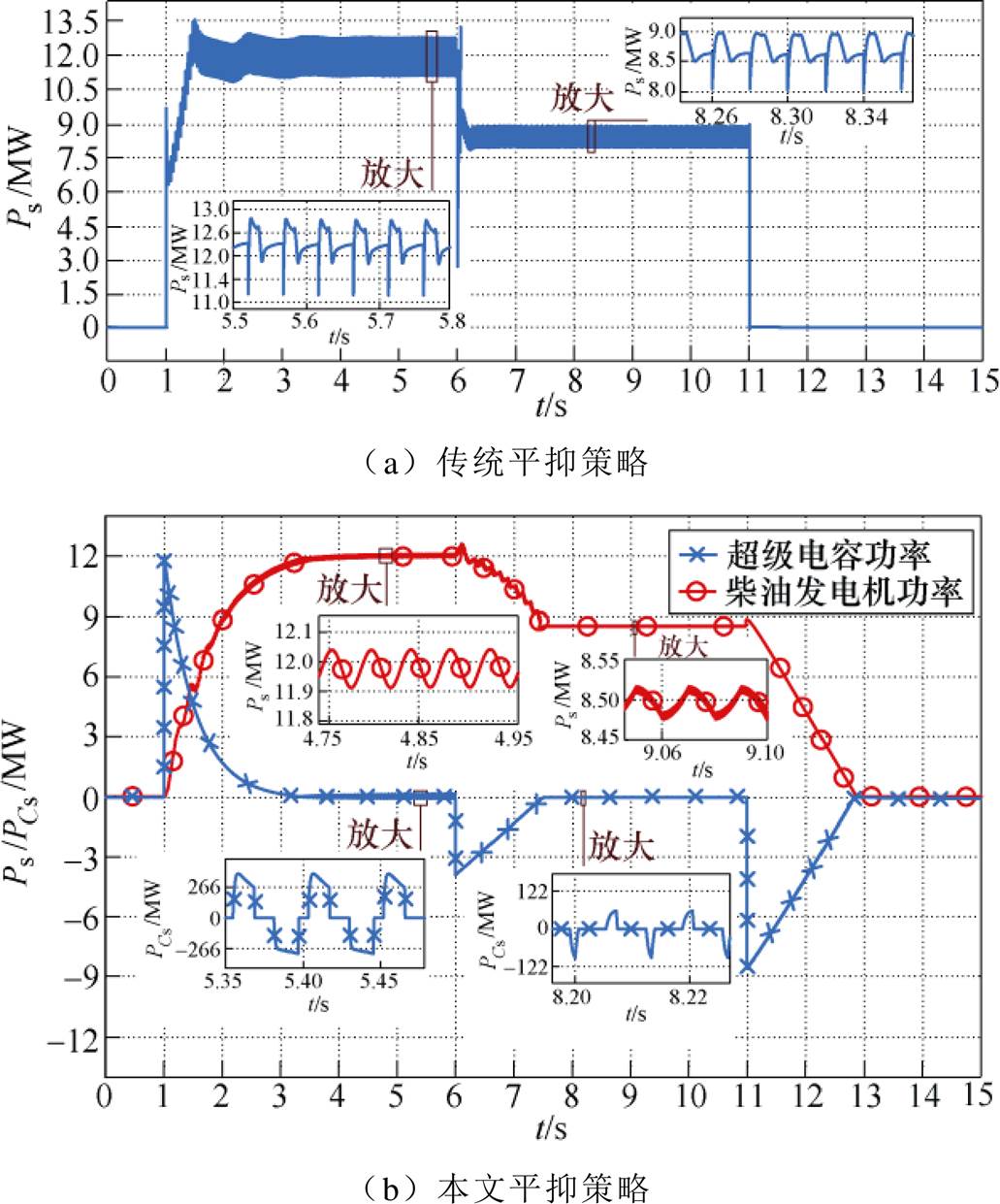
图19 两种平抑策略下发电机有功功率
Fig.19 Generator active power under two suppression strategy
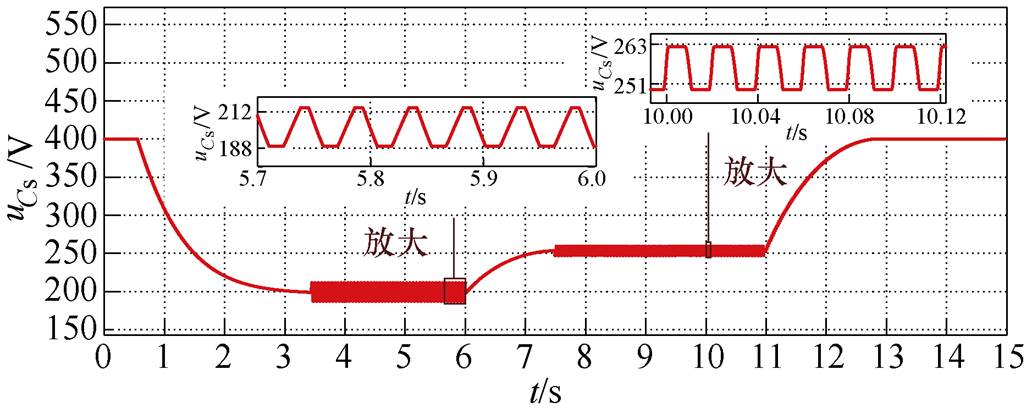
图20 本文平抑策略下超级电容电压
Fig.20 Voltage of super-capacitor under suppression strategy in this paper
将发电机转速、线电压波形进行对比分析,可以验证本文所提策略对脉冲功率冲击的暂态平抑效果。
由图17、图18所示,脉冲负载加载后,传统平抑策略下柴油发电机转速立即下跌至620 r/min,线电压幅值下跌至275 V,而超级电容协调控制策略下转速仅降至745 r/min,线电压幅值无明显波动。当脉冲负载从重载切换为轻载时,由于柴油发电机的惯性特征以及传统控制不具备抑制转速上升的能力,导致发电机飞车,转速升至787 r/min,线电压幅值增至394 V,而在本文所提平抑策略下超级电容吸收发电机多余转子动能,转速仅上升至750.8 r/min,线电压幅值无明显波动;当脉冲负载卸载后,传统平抑策略下发电机飞车更为严重,其转速突增至897 r/min,线电压幅值上升至520 V,而本文所提平抑策略下发电机转速仅上升为753.2 r/min,线电压幅值则有2 V超调。
由图19可知,传统平抑策略下,发电机功率在负载加载、切换、卸载时立即突变,其加载时间仅为0.4 s,切换时间为0.18 s,卸载时间为0.05 s。这在实际工程中会导致容量有限的柴油发电机停机,且无论在重载或轻载时,柴油机稳态功率波形都有尖峰出现,重载时波动功率波动范围为11.0~12.9 MW,轻载时为8.05~8.9 MW。这在实际工程中会使发电机调速器振荡发散,危及船舶电力系统稳定运行。
由图19b及图20可知,超级电容在发电机突增、突减负载时会通过充放电吸收或补偿功率,使得发电机功率缓慢上升或下降,柴油发电机加载时间为2.4 s,切换时间为1.5 s,卸载时间为1.9 s。同时,在稳态时超级电容根据不同工况对发电机进行实时补偿,此时重载时发电机功率波动范围为11.9~12.05 MW,轻载时为8.47~8.52 MW。重载和轻载时的超级电容电压放大波形都体现了“过渡区”设计的有效性。
传统冲击平抑策略与本文所提策略在重载时的各项稳态性能指标对比见表2。由仿真波形可知,轻载时两种平抑策略对比具有类似的特征,因此不再赘述。
表2 工况1下两种平抑策略稳态性能指标对比
Tab.2 Comparison of performance indicators between two suppression strategies under operating condition 1

性能指标传统控制策略本文所提策略 脉冲负载功率波动/MW35.2~56.843.5~48.2 脉冲负载端电压波动/V685~870775~826 发电机转速范围/(r/min)620~917745~754 发电机线电压幅值范围/V275~473378~380 发电机功率波动/MW11.0~12.911.90~12.05
两种平抑策略下负载切换后的系统暂态性能指标见表3。
表3 工况切换时两种平抑策略暂态性能指标对比
Tab.3 Comparison of transient performance indicators of two suppression strategies when switching operating conditions

性能指标传统控制策略本文所提策略 加载时间/s0.42.4 切换时间/s0.181.5 卸载时间/s0.051.9 加载后转速/(r/min)620745 切换后转速/(r/min)787750.8 卸载后转速/(r/min)897753.2 加载后线电压幅值/V275379.1 切换后线电压幅值/V394379.8 卸载后线电压幅值/V520378
表3中,加载、切换、卸载后转速及线电压幅值分别为脉冲幅值在加载、切换、卸载后短时间内转速和线电压最大变化值,如图15中脉冲负载在加载后转速立即降至620 r/min,即为传统控制策略下加载后转速值。由表2、表3可见,本文所提策略无论是在暂态突变后还是稳态运行时,各项性能指标都远优于传统平抑策略。
针对高频高幅值脉冲负载对船舶电力系统造成功率冲击影响的问题,提出了一种基于超级电容冲击平抑装置的脉冲功率平抑方法。该方法通过采样直流母线电压并以VDG控制调控超级电容响应时间和输出功率。通过硬件在环仿真证明了该策略的有效性,并得出以下结论:
1)高频高幅值脉冲负载在发电机侧表现为高幅值长时间的脉动功率,其加载、切换、卸载以及稳态运行时会对船舶电力系统造成功率不同程度冲击影响,研究结果表明,突加、突减负载时对船舶电力系统影响最大。
2)与采用传统DC-DC变换器的储能系统相比,基于VDG控制的超级电容冲击平抑装置具有灵活可调节的虚拟转动惯量及输出功率,从而可通过储能系统增强船舶电力系统抗冲击扰动能力。
3)基于搭建硬件在环仿真模型的结果对比分析可知,本文所提平抑策略在脉冲负载全范围工况运行时具备良好的平抑效果。尤其是在突加、突卸脉冲负载时可以延长发电机稳态时间,使其功率缓慢增加至额定值,同时其转速和线电压幅值波动也大幅度减少。
综上所述,本文所提控制策略解决了不同工况运行时对柴油发电机组的冲击问题,冲击功率经过平抑后,在柴油发电机侧呈现与推进负载相同的特性,因而简化了柴油发电机控制器设计,对于搭载高频高幅值脉冲负载的现代船舶电力系统稳定性具有实际意义。
附 录
附表1中对本文出现的参数及其对应符号进行了整理归纳,以便查证。
附表1 本文系统参数
App.Tab.1 System parameter list in this paper

参 数符 号 虚拟阻尼B 直流母线电容Cbus Boost电路高压端电容Cp 单重超级电容Cs 超级电容总容值Cst 双向DC-DC Buck模式占空比Dek 双向DC-DC Boost模式占空比Det 脉冲负载占空比Dp 脉冲负载三种工况下占空比Dp1, Dp2, Dp3 Boost电路占空比Dpt VDG电动势e 双向DC-DC开关频率fs 双向DC-DC补偿电流ice 发电机侧输出电流ig 脉冲负载瞬时电流ihp 双向DC-DC电感电流iLe 脉冲负载扰动电流iLpw VDG电枢电流is
(续)

参 数符 号 双向DC-DC输入电流ise 双向DC-DC电容额定电流ICsn 双向DC-DC电感额定电流ILn 虚拟转动惯量J 双向DC-DC电感Le Boost电路电感Lp VDG电感Ls 超级电容冲击平抑装置重数m 脉冲负载瞬时功率Pp 脉冲负载平均功率Ppa 双向DC-DC电感寄生电阻Re Boost电路电感寄生电阻RLp 脉冲负载三种工况下等效电阻Rp1, Rp2, Rp3 VDG电枢电阻Rs 脉冲时间ton 切轻载时间Tc VDG电磁转矩Te 加载时间Tl VDG机械转矩Tm 卸载时间Tr VDG端电压ua 直流母线电压ubus 脉冲负载端电压uCp 超级电容端电压uCs 超级电容设定最高/最低电压UCh/UCl VDG转速w VDG额定转速wN 柴油机转速ws
本文理论推导及仿真所使用系统参数取值见附表2。
附表2 理论推导及仿真系统参数
App.Tab.2 List of system parameter value of theoretical derivation and simulation

参 数数 值 虚拟阻尼/(N·s/m)320 直流母线电容/mF1.2 Boost电路高压端电容/mF26.4 单重超级电容/mF120 工况1占空比(%)25 工况2占空比(%)50
(续)

参 数数 值 Boost电路占空比25 双向DC-DC开关频率/kHz10 虚拟转动惯量/(kg·m2)220 双向DC-DC电感/mH1.2 Boost电路电感/mH230 双向DC-DC电感寄生电阻/mW10 Boost电路电感寄生电阻/mW2 工况1脉冲负载等效电阻/mW13.3 工况2脉冲负载等效电阻/mW23.7 VDG额定转速/(r/min)500 同步发电机定子电阻(pu)0.002 3 同步发电机定子d、q轴电抗(pu)0.132 9、0.132 9 同步发电机d、q轴阻尼绕组电阻(pu)0.007 2、0.002 3 同步发电机d、q轴阻尼绕组电抗(pu)0.048 7、0.226 9 柴油机时间常数/s0.65 柴油机额定转速/(r/min)750
参考文献
[1] Faddel S, Saad A A, El Hariri M, et al. Coordination of hybrid energy storage for ship power systems with pulsed loads[J]. IEEE Transactions on Industry Applications, 2020, 56(2): 1136-1145.
[2] Fang Sidun, Wang Yu, Gou Bin, et al. Toward future green maritime transportation: an overview of seaport microgrids and all-electric ships[J]. IEEE Transa- ctions on Vehicular Technology, 2020, 69(1): 207- 219.
[3] 刘正春, 朱长青, 王勇, 等. 带脉冲负载的独立电力系统源载耦合关系及功率分配[J]. 高电压技术, 2019, 45(4): 1161-1170.
Liu Zhengchun, Zhu Changqing, Wang Yong, et al. Study on sourced-load coupling and power dis- tribution of isolated power system with pulsed load[J]. High Voltage Engineering, 2019, 45(4): 1161-1170.
[4] 甄洪斌, 张晓锋, 沈兵, 等. 脉冲负荷对舰船综合电力系统的冲击作用研究[J]. 中国电机工程学报, 2006, 26(12): 85-88.
Zhen Hongbin, Zhang Xiaofeng, Shen Bing, et al. Research on impact of pulsed power loads on naval integrated power system[J]. Proceedings of the CSEE, 2006, 26(12): 85-88.
[5] 肖润龙, 王刚, 徐晨, 等. 含脉冲负载的中压直流综合电力系统的无迹卡尔曼动态状态估计方法[J]. 中国电机工程学报, 2020, 40(23): 7555-7566.
Xiao Runlong, Wang Gang, Xu Chen, et al. An unscented Kalman filter based dynamic state estimation for the medium-voltage DC integrated power system with pulse load[J]. Proceedings of the CSEE, 2020, 40(23): 7555-7566.
[6] 赵志魁, 徐晔, 黄克峰, 等. 脉冲负载下模糊PID调速器控制柴油发电机的研究[J]. 电气技术, 2021, 22(9): 1-6.
Zhao Zhikui, Xu Ye, Huang Kefeng, et al. Research on fuzzy-PID governor controlling diesel generator under pulsed load[J]. Electrical Engineering, 2021, 22(9): 1-6.
[7] 袁利国, 曾凡明, 沈兵, 等. 脉冲负载柴油发电机组的设计及试验研究[J]. 武汉理工大学学报 (交通科学与工程版), 2010, 34(1): 158-161.
Yuan Liguo, Zeng Fanming, Shen Bing, et al. Design and test research on diesel generating set under pulsed load[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2010, 34(1): 158-161.
[8] 孙勇, 林松, 卢胜利, 等. 相控阵雷达阵面供电系统功率波动机理研究[J]. 现代雷达, 2021, 43(12): 92-99.
Sun Yong, Lin Song, Lu Shengli, et al. A study on power fluctuation mechanism of phased array radar power system[J]. Modern Radar, 2021, 43(12): 92-99.
[9] 严鋆, 王金全, 黄克峰, 等. 脉冲功率负载等效拓扑及潮流计算模型分析[J]. 电工技术学报, 2018, 33(23): 5523-5531.
Yan Jun, Wang Jinquan, Huang Kefeng, et al. Analysis of equivalent topology and power-flow calculation model for pulsed power load[J]. Transa- ctions of China Electrotechnical Society, 2018, 33(23): 5523-5531.
[10] 李启国. 超级电容器储能脉冲电源的研究[D]. 哈尔滨: 哈尔滨工业大学, 2008.
[11] 范原. 脉冲负载直流变换器输出动态响应的研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
[12] 孙磊, 黄文焘, 邰能灵, 等. 船载脉冲功率系统动态过程建模及其变换器参数优化[J]. 电力自动化设备, 2023, 43(4): 54-61, 77.
Sun Lei, Huang Wentao, Tai Nengling, et al. Dynamic process modeling and converter parameter opti- mization of marine based pulsed power system[J]. Electric Power Automation Equipment, 2023, 43(4): 54-61, 77.
[13] 庞宇, 黄文焘, 吴骏, 等. 船舶大功率脉冲负载抗冲击供电系统[J]. 上海交通大学学报, 2021, 55(10): 1197-1209.
Pang Yu, Huang Wentao, Wu Jun, et al. Surge- suppression power supply system for ship high power pulse loads[J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1197-1209.
[14] 陈宇航, 王刚. 含脉冲负载的综合电力系统运行特性分析[J]. 船电技术, 2016, 36(6): 1-5.
Chen Yuhang, Wang Gang. Operation characteristics of integrated power system with pulse load[J]. Marine Electric & Electronic Engineering, 2016, 36(6): 1-5.
[15] 赵凡琪, 孙国亮. 脉冲型负载对船舶电网稳定性影响的仿真研究[J]. 船舶, 2020, 31(5): 59-68.
Zhao Fanqi, Sun Guoliang. Influence of pulse load on stability of ship power grid[J]. Ship & Boat, 2020, 31(5): 59-68.
[16] 高雪平, 付立军, 纪锋, 等. 含脉冲负载的综合电力系统储能优化配置研究[J]. 国防科技大学学报, 2022, 44(6): 81-88.
Gao Xueping, Fu Lijun, Ji Feng, et al. Research on optimal configuration of energy storage in integrated power system with pulse load[J]. Journal of National University of Defense Technology, 2022, 44(6): 81-88.
[17] 杨帆, 李林, 朱建鑫, 等. 面向高峰均比低频脉冲功率负载的脉冲电流补偿器及其控制方法[J]. 电工技术学报, 2022, 37(16): 4193-4201.
Yang Fan, Li Lin, Zhu Jianxin, et al. A pulsed current compensator and control strategy for high peak- to-average-ratio low frequency pulsed load[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4193-4201.
[18] 童林, 许金, 吴振兴, 等. 脉冲功率超级电容冲击平抑装置容量计算方法[J]. 船电技术, 2016, 36(9): 72-76.
Tong Lin, Xu Jin, Wu Zhenxing, et al. Design of a large pulse power super-capacitor energy storage system[J]. Marine Electric & Electronic Engineering, 2016, 36(9): 72-76.
[19] 李轩, 李永丽, 常晓勇. 基于精确线性化理论的超级电容冲击平抑装置的非线性控制算法[J]. 电工技术学报, 2016, 31(21): 12-20.
Li Xuan, Li Yongli, Chang Xiaoyong. Nonlinear control algorithm for super capacitor energy storage system based on exact linearization theory[J]. Transactions of China Electrotechnical Society, 2016, 31(21): 12-20.
[20] 张泽华, 宋桂英, 张晓璐, 等. 考虑恒功率负载的直流微电网稳定性与鲁棒性控制策略[J]. 电工技术学报, 2023, 38(16): 4391-4405.
Zhang Zehua, Song Guiying, Zhang Xiaolu, et al. Stability and robustness control strategy of DC microgrid considering constant power load[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4391-4405.
[21] 施天灵, 汪飞, 张圣祺, 等. 直流船舶综合电力系统中混合储能的精确功率分配策略研究[J]. 电源学报, 2020, 18(6): 12-19.
Shi Tianling, Wang Fei, Zhang Shengqi, et al. Research on accurate power distribution strategy for hybrid energy storage in DC shipboard integrated power system[J]. Journal of Power Supply, 2020, 18(6): 12-19.
[22] 马伟明, 鲁军勇. 电磁发射技术的研究现状与挑战[J]. 电工技术学报, 2023, 38(15): 3943-3959.
Ma Weiming, Lu Junyong. Research progress and challenges of electromagnetic launch technology[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 3943-3959.
[23] 周美权, 徐晔, 黄克峰, 等. 虚拟同步发电机带脉冲负载运行特性研究[J]. 电气技术, 2022, 23(6): 59-68.
Zhou Meiquan, Xu Ye, Huang Kefeng, et al. Operating characteristics of virtual synchronous generator with pulse load[J]. Electrical Engineering, 2022, 23(6): 59-68.
[24] 樊靖轩, 施佳楠, 徐子梁, 等. 基于GaN的开关线性复合高速随动脉冲负载直流变换器[J]. 电工技术学报, 2024, 39(6): 1818-1829.
Fan Jingxuan, Shi Jianan, Xu Ziliang, et al. High speed switching-linear hybrid followed-up pulse load DC converter based on GaN device[J]. Transactions of China Electrotechnical Society, 2023, 2024, 39(6): 1818-1829.
[25] 孙勇, 林松. 相控阵雷达发射单元供电建模及特性研究[J]. 现代雷达, 2020, 42(9): 80-85, 90.
Sun Yong, Lin Song. A study on power supply model and characteristic of phased array radar transmitting unit[J]. Modern Radar, 2020, 42(9): 80-85, 90.
[26] 董保路. 舰载多功能相控阵雷达资源调度仿真技术研究及实现[D]. 西安: 西安电子科技大学, 2018.
[27] 唐尧, 张进, 张祥瑞. 美国海基弹道导弹预警观测平台发展现状及思考[J]. 船舶, 2019, 30(4): 99- 107.
Tang Yao, Zhang Jin, Zhang Xiangrui. Present status and consideration on development of pre-warning observation platform for US sea-based ballistic missile[J]. Ship & Boat, 2019, 30(4): 99-107.
Abstract Various pulsed loads are widely used in modern ship power systems. Herein, radar pulsed loads have high-frequency and high-amplitude power characteristics. The loading-unloading and frequent-state switching cause severe impacts on the ship power system with weak inertia and even cause the diesel generator set to oscillate and stop. However, more research is still needed on the impacts of high-frequency and high-peak pulsed loads on the stability of ship power systems and the disturbance mechanism. Furthermore, the problems of traditional passive suppression strategies, such as ship space waste, short service life, and lack of pulsed load multi-mode suppression capability, should be solved urgently. This paper designs a multi-mode pulsed disturbance suppression strategy based on virtual dc motor control (VDG) by analyzing the disturbance mechanism of high-frequency and high-peak pulse loads on ship power systems.
Firstly, this paper establishes a mathematical model of typical pulsed loads. The power characteristics and their impacts of pulsed loads on ship power system stability and impact mechanism are analyzed. A supercapacitor shock suppression device is suggested to suppress pulse power. The feasibility of this suppression strategy is derived, and the structure and related parameters of the suppression device are designed. Secondly, by analyzing the operation mechanism of the virtual DC motor, the feasibility of improving the inertia of the bidirectional DC-DC converter by VDG control is determined. The small signal model and system transfer function of the bidirectional DC-DC converter are derived, and the effects of virtual rotational inertia and virtual damping on the stability of the suppression device are analyzed. Then, a suppression device control strategy suitable for steady-state operation and transient sudden changes of pulsed loads is proposed.
Finally, based on the RT Box 3 semi-physical simulation platform, a ship power system model with a suppression device is built to verify the proposed control strategy. The simulation results show that: (1) the high-frequency and high-amplitude pulsed load is manifested as a high-amplitude long-term pulsating power on the generator side. Its loading, switching, unloading, and steady-state operation cause different degrees of power impacts on the ship power system, and its sudden addition and subtraction of load have the greatest impact on the ship power system. (2) Compared with the energy storage system with the traditional DC-DC converter, the supercapacitor shock suppression device based on VDG control has flexible and adjustable virtual rotational inertia and output power. Therefore, the energy storage system enhances the ship power system's ability to resist impact disturbances. (3) The proposed suppression strategy has a good suppression effect when the pulsed loads run in the full range of operating conditions. Especially in the case of sudden addition and unloading of pulsed loads, it can prolong the steady-state time of the generator. As a result, its power can be slowly increased to the rated value, and its speed and line voltage amplitude fluctuations are significantly reduced.
keywords:Ship power system, pulsed loads, power suppression, supercapacitor, virtual DC generator
中图分类号:TM762
DOI: 10.19595/j.cnki.1000-6753.tces.231246
黑龙江省自然科学基金联合引导资助项目(LH2021E086)。
收稿日期 2023-08-01
改稿日期 2023-11-20
孙东阳 男,1988年生,博士,副教授,研究方向为特种船舶中强冲击平抑方法。E-mail: sundy@163.com
李 爽 男,1997年生,硕士研究生,研究方向为综合船舶电力系统及其稳定控制。E-mail: 2220310263@stu.hrbust.edu.cn(通信作者)
(编辑 陈 诚)