图1 含联合储能系统的AC/DC混合微电网分层控制结构
Fig.1 Hierarchical control structure of AC/DC hybrid microgrid with combined energy storage system
摘要 针对电动汽车作为灵活储能分散接入交直流混合微电网后过度依赖双向互联接口变换器进行子网间储能交互的问题,提出一种考虑电动汽车和蓄电池联合储能的交直流混合微电网功率协调控制策略。首先,考虑交、直流子网净功率和功率互济级最大传输功率作为约束条件,将其划分为四种运行状态,并进一步分析功率互济级功率传输方向和储能荷电状态,详细划分不同模式对应的具体工况;然后,考虑电动汽车和蓄电池的响应优先级,设计联合储能动作规则,并详细研究交、直流子网和联合储能子网间的功率交互,制定功率协调控制策略,提出系统模式及工况切换方法;最后,基于Matlab/Simulink仿真平台搭建了交直流混合微电网仿真模型对所提控制策略进行验证。
关键词:交直流混合微电网 联合储能 电动汽车 功率互济级 响应优先级 协调控制
近年来,随着高比例分布式电源(Distributed Generation, DG)和直流负荷接入微电网[1],交直流混合微电网因具备接纳交/直流DG和负荷的能力,且兼具单一交/直流微电网的优势[2-3],成为微电网的研究热点。对交直流混合微电网功率协调控制的研究,能够解决由于DG功率波动和负荷频繁投切导致的系统功率不平衡问题[4-5]。相较于单一交流或直流微电网,交直流混合微电网的功率协调控制更加复杂。
围绕交直流混合微电网的源荷功率平衡问题,目前一方面是从“源-荷-储”无互联通信条件下,对其协调控制开展研究[6-7]。文献[8]在传统分散储能接入交、直流子网的交直流混合微电网结构下,提出分段下垂的控制方法。文献[9]考虑分散储能容量和微电网运行模式,通过制定不同模式下的控制方法,设计分段协调控制策略。上述文献仅依靠双向互联接口变换器(Bidirectional Interlinking Converter,BILC)协调网间功率流动[10],无法满足所有工况灵活运行,需要进一步完善交直流混合微电网的整体控制策略。
另外一方面是对功率协调分层控制开展研究,通过微电网中间层的中央控制器协调控制交、直流子网功率交互相互支撑[11],并满足微电网所有运行工况的功率传输需求。文献[12]将交直流混合微电网分为变换器控制层和运行功率控制层,提出不同工况下的协调控制策略,并研究储能的过充过放,但未考虑储能荷电状态(State of Charge,SOC)变化对子网间功率互济的影响。文献[13]在分层控制的基础上,提出多模式功率协调控制策略,实现了源荷功率平衡和网间SOC的均衡。在文献[13]的基础上,文献[14]将电动汽车作为灵活储能接入直流子网,延缓或者停止储能过充过放趋势,但储能间存在能量交互损耗且对BILC功率传输容量问题研究不足。上述文献因传统分散储能接入交、直流子网结构的局限性,在均衡储能SOC时造成能量交互损耗并增加了BILC功率传输压力。
将地理位置临近的储能单元互联[15]组成储能子网,接入交直流混合微电网并对其进行功率协调控制[16-17]。交、直流子网共享储能可分担BILC传输压力,为储能间SOC均衡提供研究思路。文献[18-19]针对三端口AC-DC-分布式储能的交直流混合微电网,在无通信条件下设计了自主运行的分布式切换的控制策略。文献[20]在互联通信条件下,考虑储能SOC,将储能划分为五种运行模式,提出多模式协调控制策略。上述三端口结构,互联变换器星形联结增加了换流环节,且功率互济受到单个变换器的影响。因此,文献[21]将储能子网通过接口变换器直接与交、直流子网连接,采用自适应下垂和分布式协调功率控制,以确保系统稳定运行。文献[22]提出一种包含中央储能系统的交直流混合微电网,并通过底层控制实现中央储能系统与交、直流子网的功率平衡。上述文献在对储能单元的研究中采用单一蓄电池储能,不能满足各种复杂场景下储能的多元化需求,且频繁启动会严重影响其循环寿命。
综上所述,现阶段的研究存在三点不足:①传统分散储能接入交、直流子网,在均衡网间储能SOC时,会造成能量交互损耗并增加BILC的传输压力;②在无互联通信条件下,仅依靠BILC底层控制协调功率流动,不能满足所有工况灵活运行;③将储能集中后接入微电网的研究中,储能系统多采用单一储能,不能满足各种复杂场景下储能多元化需求。针对上述问题,本文提出一种考虑电动汽车和蓄电池联合储能的交直流混合微电网功率协调控制策略。首先,介绍交直流混合微电网分层控制结构;其次,考虑交、直流子网净功率和增加功率互济级(Power Mutual Class, PMC)最大传输功率作为边界条件,并考虑储能SOC划分运行模式及工况;再次,考虑电动汽车和蓄电池响应优先级,设计联合储能动作规则,并制定各模式下交直流混合微电网功率协调控制策略;最后,基于Matlab/ Simulink搭建了交直流混合微电网仿真模型,验证本文所提控制策略的有效性。
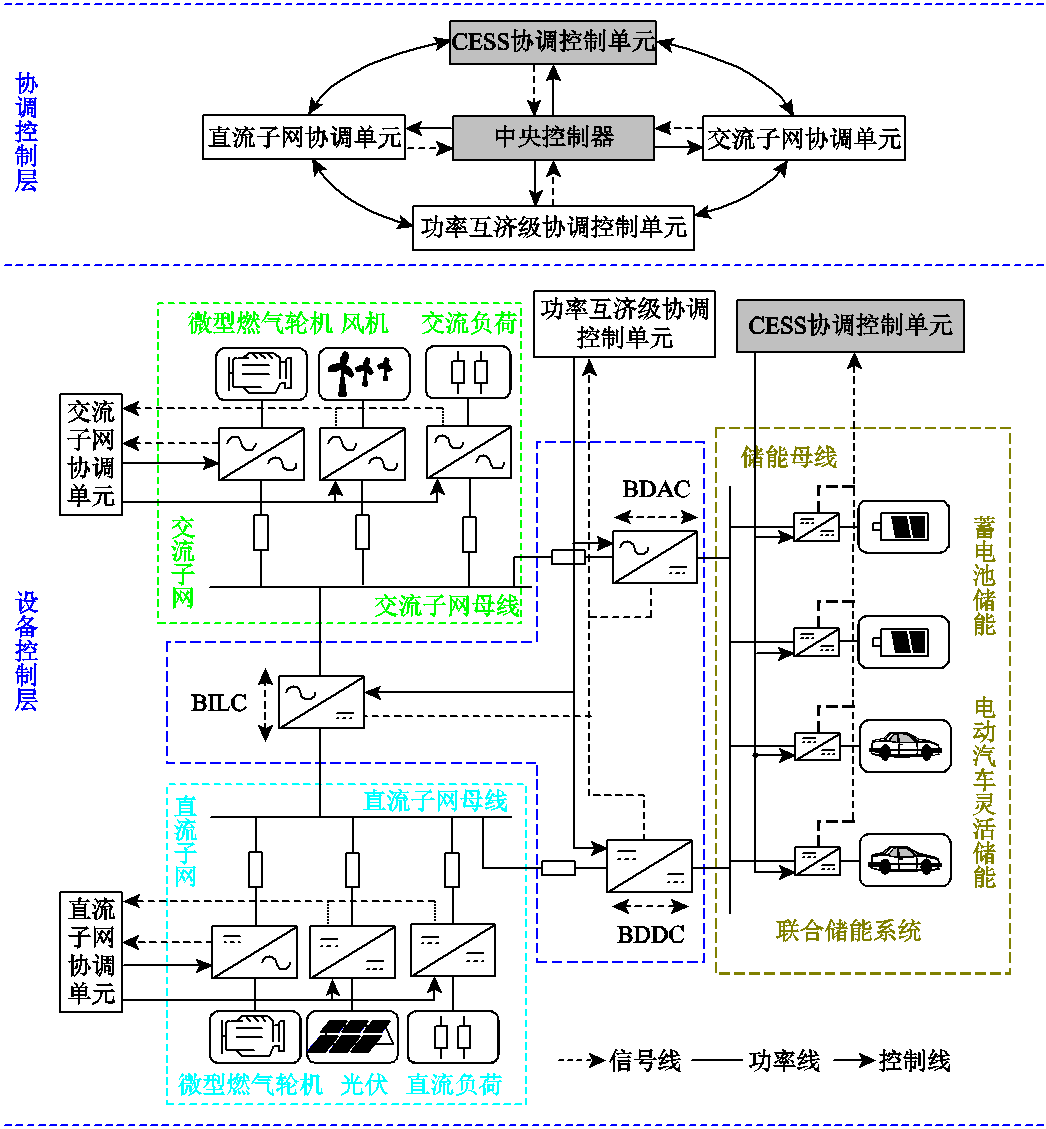
考虑电动汽车和蓄电池联合储能的交直流混合微电网分层控制结构如图1所示。DG单元分为可调度型分布式电源(Dispatchable DG,DPDG)和间歇型分布式电源(Intermittent DG,IMDG)。本文DPDG为微型燃气轮机,IMDG包括风机和光伏发电单元。交流子网由DG和交流负荷组成,其中DG包含风机发电单元和微型燃气轮机,并通过变换器与交流子网母线连接;直流子网由DG和直流负荷组成,其中DG包含光伏发电单元和微型燃气轮机,并通过变换器与直流子网母线连接;交、直流子网将通过BILC连接起来;交、直流母线分别通过双向DC-AC变换器(Bidirectional DC-AC Converter, BDAC)、双向DC-DC变换器(Bidirectional DC-DC Converter, BDDC)与电动汽车和蓄电池储能组成的联合储能系统(Combined Energy Storage System,CESS)储能母线连接。
图1 含联合储能系统的AC/DC混合微电网分层控制结构
Fig.1 Hierarchical control structure of AC/DC hybrid microgrid with combined energy storage system
功率协调控制是在分层控制的基础上提出的。其中底层是设备控制层,负责设备信息采集和设备控制;顶层是能量管理层,负责系统的经济优化调度;中间层是协调控制层,制定系统稳定运行模式及工况。通过协调各层级间的关系,从而实现交直流混合微电网系统源荷功率平衡。
在设备控制层中,交直流混合微电网孤岛运行状态下,为避免AC/DC混合微电网产生功率环流,通过关断一个换流器,使其开环运行以避免环流。交、直流子网中IMDG单元采用最大功率点跟踪控制以最大限度地利用风、光资源,DPDG单元采用下垂控制并和IMDG单元协调配合维持母线电压和频率稳定,DPDG单元下垂控制如附录中式(A1)~式(A3)所示。设备控制层还通过各协调控制单元收集交、直流子网的出力和负荷数据,检测交流母线频率、直流母线电压、储能母线电压以及联合储能中蓄电池、电动汽车的储能SOC等信息,并将其上传至协调控制层。
在协调控制层中,根据各协调控制单元上传的信息,微电网中央控制器(Microgrid Central Controller, MGCC)计算并匹配相应的运行模式工况,并根据预设的功率协调策略,将处理后的指令下达给BILC、BDAC和BDDC组成的功率互济级协调控制单元,生成传输功率的参考值。交直流混合微电网各协调单元上传信息,MGCC统筹考虑混合微电网系统储能SOC和功率盈余情况,避免出现功率越限和储能过充过放的现象,CESS通过BDAC和BDDC分别支撑交流母线频率和直流母线电压。
交、直流子网的运行模式根据其净功率以及功率互济级互联接口变换器功率传输的最大值,可分为如图2所示的四种运行状态:子网自主运行、网间盈余互济、网间亏缺互济和功率越限运行。净功率为
 (1)
(1)
式中,ΣPAC_out和ΣPDC_out分别为交、直流子网DG的出力;ΣPAC_load和ΣPDC_load分别为交、直流子网的负荷;ΔPDC和ΔPAC分别为交、直流子网的净功率;ΔP为交、直流子网总净功率。规定交、直流子网功率盈余时净功率为正,亏缺时净功率为负。
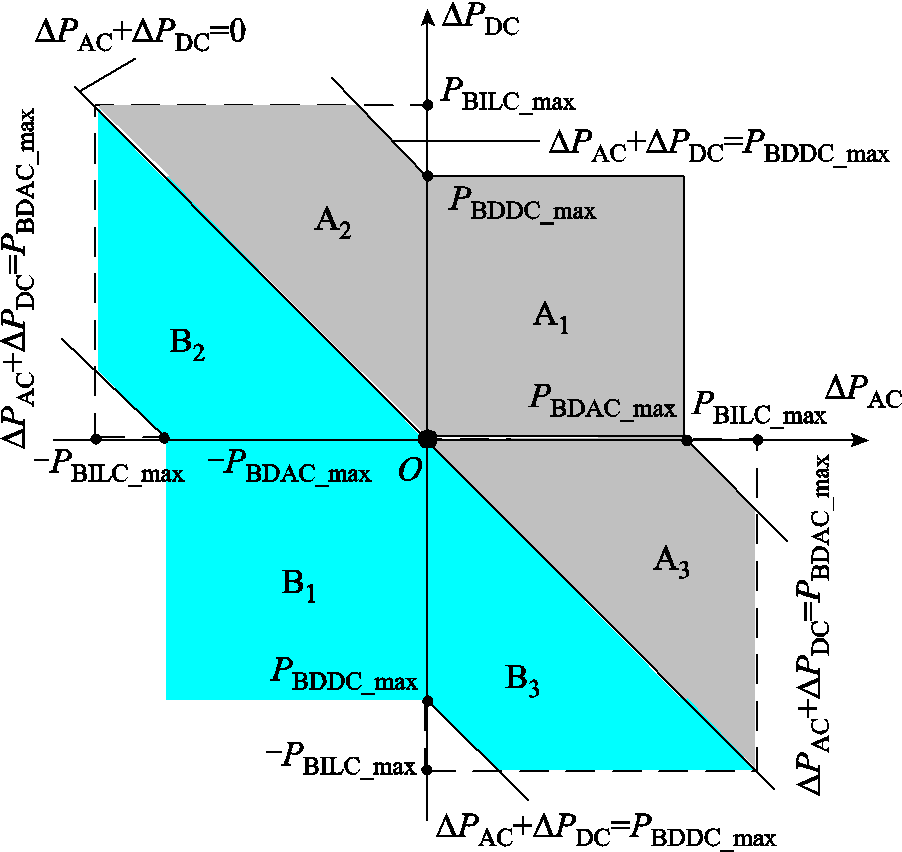
图2 两子网运行状态划分
Fig.2 Two subgrids operation state division
图2中横纵坐标分别为交、直流子网净功率,PBILC_max表示BILC传输功率最大值,PBDAC_max表示BDAC传输功率最大值,PBDDC_max表示BDDC传输功率最大值。其中规定BILC逆变方向为正,整流方向为负;BDAC和BDDC工作在联合储能,充电方向为正,放电方向为负。A1、A2、A3和坐标轴正半轴部分区域对应网间盈余互济运行;B1、B2、B3和坐标轴负半轴部分区域对应网间亏缺互济运行;ΔPDC+ΔPAC=0对应子网自主运行;其余空白部分为功率越限运行。
储能单元作为调节系统DG出力不可或缺的一部分,其中储能SOC是影响储能单元充放电动作的重要因素。根据储能SOC的特性,设置蓄电池和电动汽车车群的响应优先级,避免储能过充过放,并实现储能SOC的均衡。
具有车网互动(Vehicle to Grid, V2G)能力的电动汽车,根据其过充SOC的界限和车主约束SOC的大小设置充、放电优先级。此外,蓄电池考虑初始平均SOC值,按照充放电行为选择充放电优先级,保证联合储能系统的稳定运行。
2.2.1 蓄电池储能的响应优先级
蓄电池储能(Battery Energy Storage, BES)是由m个蓄电池组成的,定义初始平均荷电状态为
 (2)
(2)
式中,SBESn为第n个蓄电池储能单元的初始SOC;Sav为蓄电池储能初始平均荷电状态,也是蓄电池储能单元期望达到的SOC均衡值。
BES储能优先级响应如图3所示。根据SOC的大小可以将BES分为充电、放电和自由充放三种工作模式。充电和放电模式又分为三个优先级,可以更加精确地对储能SOC进行均衡。Sav作为参考零点,Smax和Smin是BES充/放电的最值。当蓄电池储能Sdch1≤SBES≤Smax时属于第一放电优先级,这一范围的BES单元有过充的趋势,优先放电;Sdch2≤SBES<Sdch1时属于第二放电优先级;Sdch3≤SBES<Sdch2时属于第三放电优先级;Sch1≤SBES<Sdch3时属于自由充放,这一范围的BES单元可以自由进行充放电;Sch2≤SBES<Sch1时属于第三充电优先级;Sch3≤SBES<Sch2时属于第二充电优先级;Smin≤SBES<Sch3时属于第一充电优先级,这一范围的BES单元有过放的趋势,优先充电。
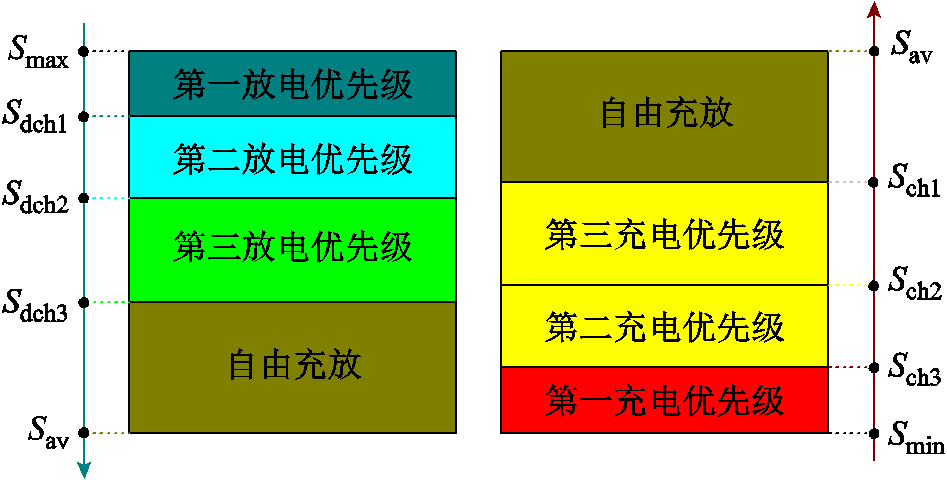
图3 BES储能优先级响应
Fig.3 BES energy storage priority response
2.2.2 电动汽车作为灵活储能的响应优先级
电动汽车(Electric Vehicle, EV)作为灵活储能,首先需要满足车主的出行需求,设备控制层将车主约束SOC和完成充放电计划后车主参与后续充/放电的意愿信息,上传至协调控制层。假设EV在接入交直流混合微电网前,每个车主根据出行需求设置约束SOC值,在电动汽车V2G行为结束前保证其达到车主约束。对电动汽车的优先级设定如下。
1)针对EV充电模式设置动作优先级。
 (3)
(3)
式中, 为第i辆EV实际SOC值和EV过充界限SOC值的差值;SEV_max为EV设置的过充SOC的界限;
为第i辆EV实际SOC值和EV过充界限SOC值的差值;SEV_max为EV设置的过充SOC的界限; 为第i辆EV的实际SOC。
为第i辆EV的实际SOC。
根据的大小,设置EV的充电优先级。电动汽车充电优先级如图4a所示, 为第四充电优先级,
为第四充电优先级, 为第三充电优先级,
为第三充电优先级, 为第二充电优先级,
为第二充电优先级, 为第一充电优先级,仅充电区间必须保证完成充电任务。当充电至
为第一充电优先级,仅充电区间必须保证完成充电任务。当充电至 时,电动汽车退出充电动作。随后可根据车主意愿考虑重新划入EV放电优先级。
时,电动汽车退出充电动作。随后可根据车主意愿考虑重新划入EV放电优先级。
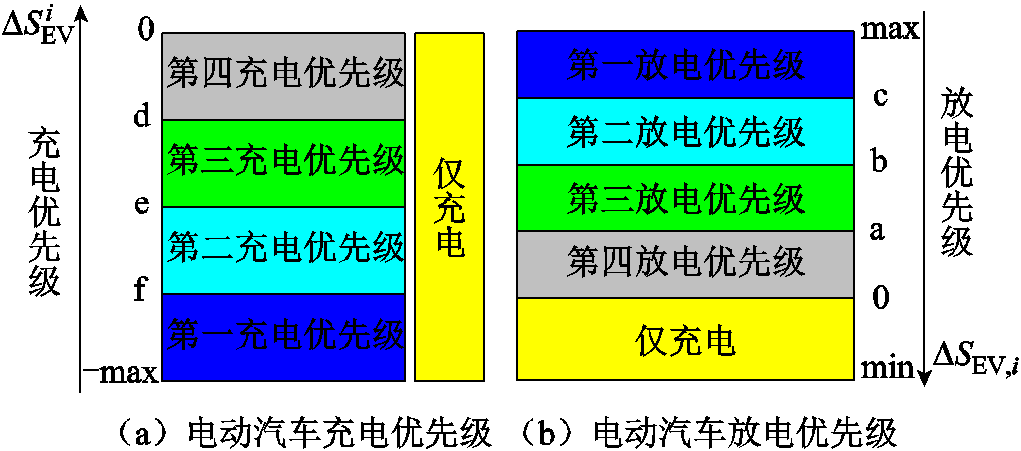
图4 EV储能充/放电优先级响应
Fig.4 EV energy storage charge/discharge priority response
2)针对EV放电模式设置动作优先级。
 (4)
(4)
式中, 为第i辆EV的约束SOC;
为第i辆EV的约束SOC; 为第i辆EV接入微电网时的实际SOC;ΔSEV,i为第i辆EV实际SOC值和约束SOC值的差值,ΔSEV,i为正EV放电运行,为负EV充电。
为第i辆EV接入微电网时的实际SOC;ΔSEV,i为第i辆EV实际SOC值和约束SOC值的差值,ΔSEV,i为正EV放电运行,为负EV充电。
根据ΔSEV,i的大小,设置EV的放电优先级。电动汽车放电优先级如图4b所示, 为第四放电优先级,
为第四放电优先级, 为第三放电优先级,
为第三放电优先级, 为第二放电优先级,
为第二放电优先级, 为第一放电优先级,划分在仅充电区间的EV即
为第一放电优先级,划分在仅充电区间的EV即 ,在源荷属性上归属于联合储能系统的负荷,必须保证在电动汽车离网时达到车主约束,当EV放电至ΔSEV,i=0时,完成充电任务。可根据车主意愿考虑重新划入EV充电优先级。
,在源荷属性上归属于联合储能系统的负荷,必须保证在电动汽车离网时达到车主约束,当EV放电至ΔSEV,i=0时,完成充电任务。可根据车主意愿考虑重新划入EV充电优先级。
2.2.3 联合储能系统的运行状态划分
针对联合储能系统存在的过充过放问题,设置了EV车群和蓄电池储能单元充放电的最值,当SEV_min≤SEV≤SEV_max,Smin≤SBES≤Smax时,按照优先级的设置进行充放电动作。其中,SEV_max和SEV_min为EV车群过充过放的SOC最值。
联合储能的运行模式包括充电和放电两种模式,分别对应系统网间盈余互济和网间亏缺互济两个模式。当系统工作在A1、A2、A3和坐标轴正半轴部分区域时,EV车群划分在 中仅充电区域的车辆作为联合储能系统的负荷,必须保证其功率需求,之后BES的优先级动作,
中仅充电区域的车辆作为联合储能系统的负荷,必须保证其功率需求,之后BES的优先级动作,
 的EV作为功率紧急消纳单元参与调节。当系统工作在B1、B2、B3和坐标轴负半轴部分区域时,BES的优先级高于EV车群,优先参与支撑功率缺额,而划分在
的EV作为功率紧急消纳单元参与调节。当系统工作在B1、B2、B3和坐标轴负半轴部分区域时,BES的优先级高于EV车群,优先参与支撑功率缺额,而划分在 区域的EV作为紧急支撑单元。
区域的EV作为紧急支撑单元。
子网的运行状态和储能SOC都是影响功率传输的重要因素。交直流混合微电网系统运行模式区间划分如图5所示,当系统ΔP=0时,联合储能不参与调节,为子网自主运行模式;当系统ΔP>0时,联合储能充电,为网间盈余互济运行模式;当系统ΔP<0时,联合储能放电,为网间亏缺互济运行模式;当系统总净功率盈余或者亏缺超过联合储能的调节范围,为功率越限运行模式。

图5 交直流混合微电网系统运行模式区间划分
Fig.5 Classification of operating mode intervals for AC/DC hybrid microgrid systems
图5中联合储能最大调节功率PCESS_max为
 (5)
(5)
式中,PBES_max和PEV_max分别为蓄电池储能和电动汽车车群的最大调节功率。交直流混合微电网运行具体模式工况划分判断条件见表1。
表1 交直流混合微电网运行模式工况划分
Tab.1 AC/DC hybrid microgrid operation mode working condition division
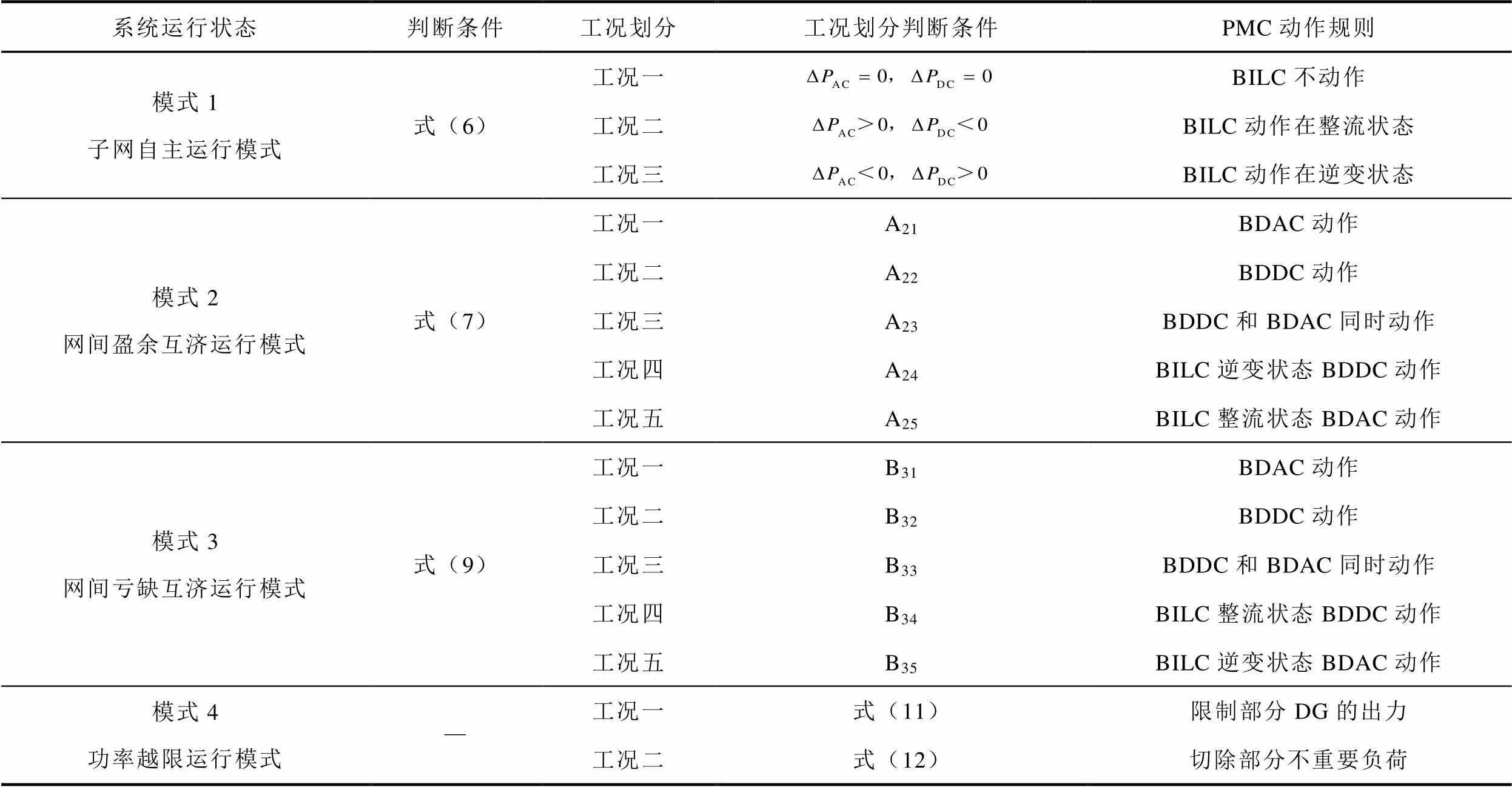
系统运行状态判断条件工况划分工况划分判断条件PMC动作规则 模式1子网自主运行模式式(6)工况一BILC不动作 工况二BILC动作在整流状态 工况三BILC动作在逆变状态 模式2网间盈余互济运行模式式(7)工况一A21BDAC动作 工况二A22BDDC动作 工况三A23BDDC和BDAC同时动作 工况四A24BILC逆变状态BDDC动作 工况五A25BILC整流状态BDAC动作 模式3网间亏缺互济运行模式式(9)工况一B31BDAC动作 工况二B32BDDC动作 工况三B33BDDC和BDAC同时动作 工况四B34BILC整流状态BDDC动作 工况五B35BILC逆变状态BDAC动作 模式4功率越限运行模式—工况一式(11)限制部分DG的出力 工况二式(12)切除部分不重要负荷
具体判断条件如下。
1)模式1。子网自主运行模式下,根据交、直流子网净功率和功率互济级的工作状态分为:工况一双向互联接口变换器(BILC)不动作,直流和交流子网独立运行;工况二BILC处于整流状态,将交流子网功率传输到直流子网补充功率缺额,通过网间功率互济平衡各子网功率;工况三BILC处于逆变状态,分析同工况二类似。模式1的判断条件为
 (6)
(6)
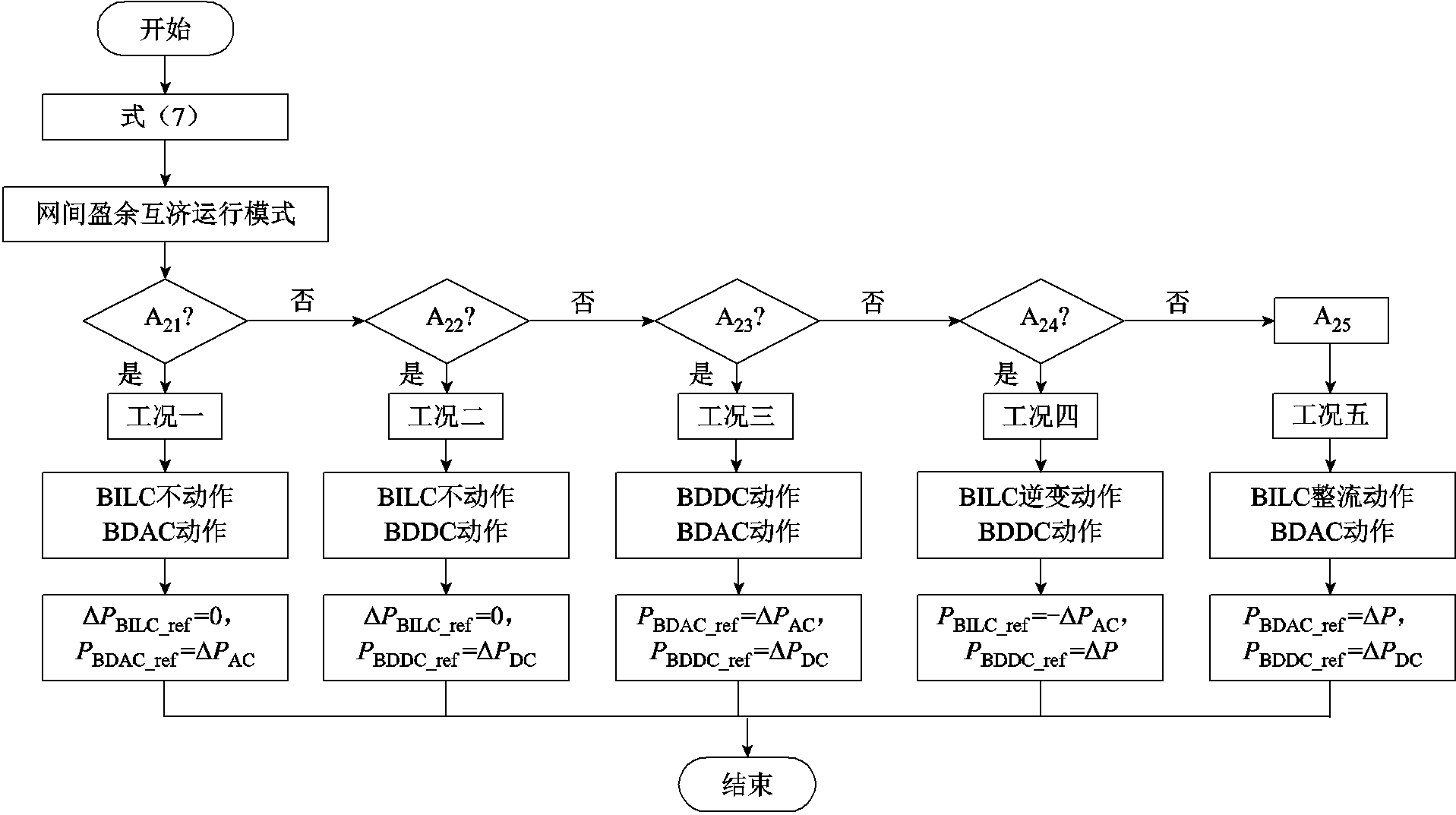
2)模式2。网间盈余互济运行模式下,联合储能工作在充电模式。模式2的判断条件如式(7)所示,其不同工况划分的判断条件如式(8)所示。
 (7)
(7)
工作状态分为:工况一,交、直流子网不进行功率传输,双向DC-AC变换器(BDAC)动作消纳交流子网盈余功率;工况二,BILC不动作,双向DC-DC变换器(BDDC)动作消纳直流子网盈余功率;工况三,BDAC和BDDC分别消纳交、直流子网盈余功率;工况四,BILC处于逆变状态,直流子网盈余优先弥补交流子网亏缺,接着BDDC动作;工况五,BILC处于整流状态,接着BDAC动作。
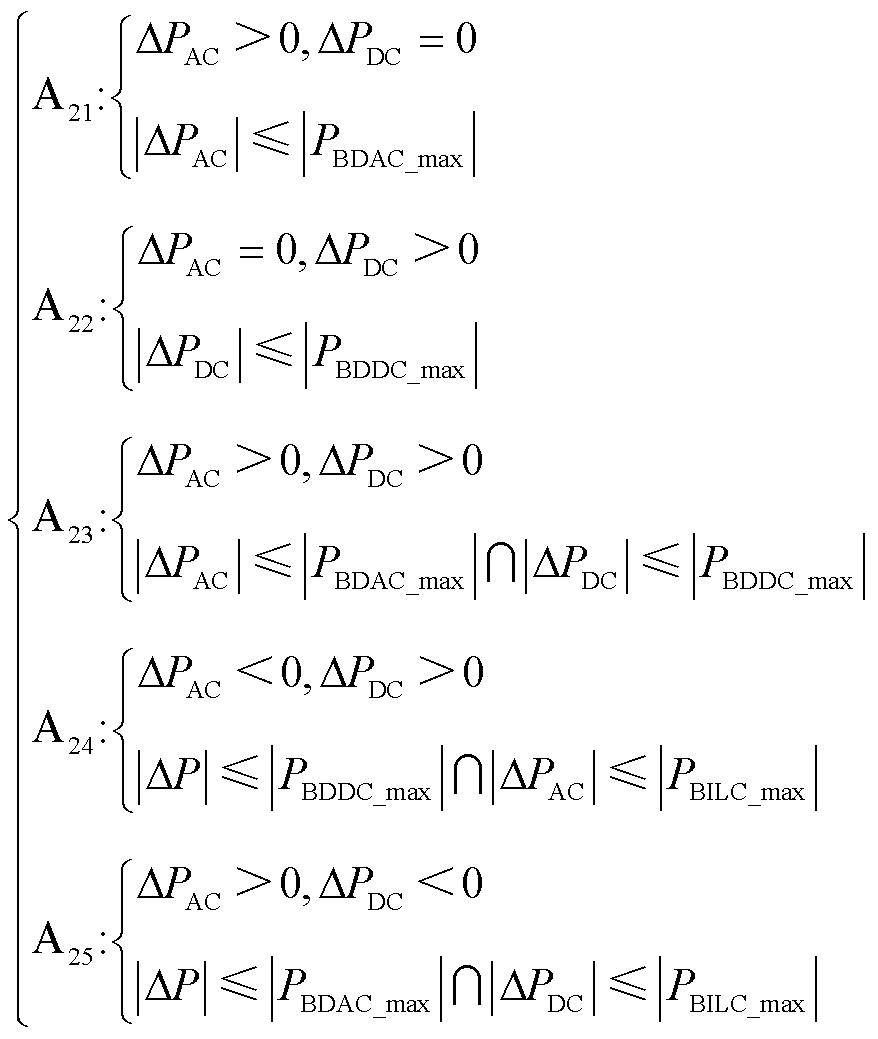 (8)
(8)
3)模式3。网间亏缺互济运行模式下,联合储能工作在放电模式。模式3的判断条件如式(9)所示,其不同工况划分的判断条件如式(10)所示。工作状态分为:工况一,BILC不传输功率,BDAC工作在逆变状态,联合储能为交流子网提供功率支撑维持交流母线频率稳定;工况二,BILC不传输功率,BDDC动作,为直流子网提供功率支撑;工况三,BILC不传输功率,BDAC和BDDC分别支撑交、直流子网功率缺额;工况四,BILC处于整流状态,BDDC动作与工况二相同;工况五,BILC处于逆变状态,BDAC动作与工况一相同。
 (9)
(9)
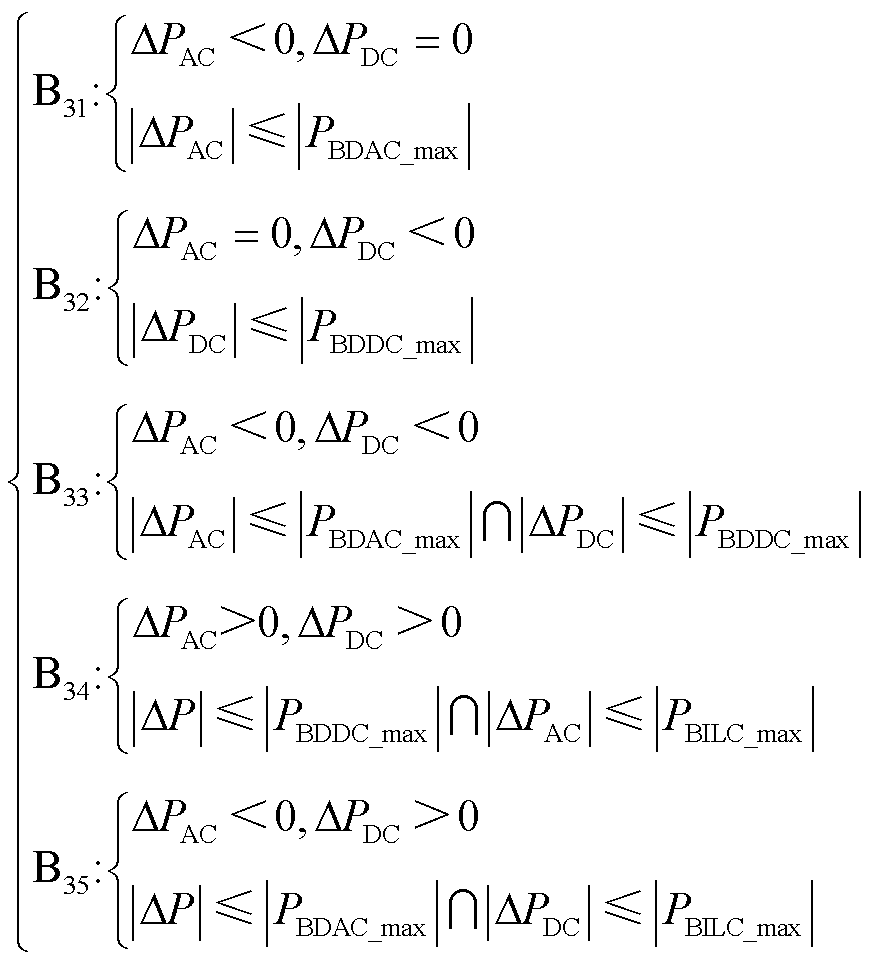 (10)
(10)
4)模式4。功率越限运行模式分为两种工况:工况一,盈余越限;工况二,亏缺越限。两种工况分别需要对两子网进行切负荷和限功率操作处理。模式4两种工况判断条件分别为
 (11)
(11)
 (12)
(12)
交直流混合微电网功率协调控制单元主要有交/直流子网协调控制单元、联合储能协调控制单元和功率互济级协调控制单元。功率互济级连接交、直流子网和联合储能子网,是传输功率的重要枢纽,但其自身无法产生或消纳功率。
联合储能系统包含EV车群和BES,BES作为联合储能系统的主控单元,其调节能力强,但受其容量约束,长时间单方向动作,易导致过充过放;电动汽车群将满足车主约束和储能SOC过充过放界限、具有V2G能力的车辆汇集起来,作为辅助功率调度单元参与功率调节。
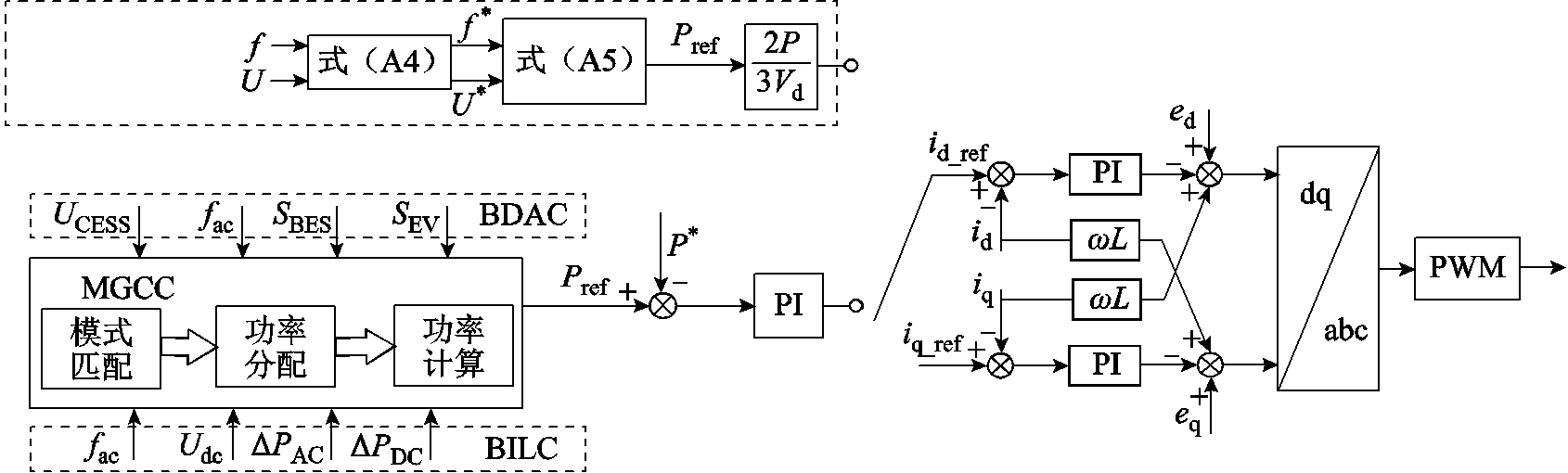
功率互济级主要根据交、直流子网的净功率对功率进行传输,维持混合微电网功率平衡系统稳定运行。如附图1、附图2所示,在MGCC通信正常时,功率互济级采用恒功率控制,各协调单元收集子网状态并反馈给MGCC后,MGCC进行模式匹配、功率分配和功率计算,输出功率互济级互联接口变换器的参考功率Pref并进行功率传输控制。为保证交直流混合微电网系统在MGCC信号中断时的可靠性,针对功率互济级底层控制,设置了备用控制,即在BILC和BDAC的控制中,将频率f和电压U进行归一化处理,并加入自适应双下垂控制输出参考功率;对于BDDC,设置恒压控制,在联合储能充电模式设置降压控制,而在放电模式设置升压控制。
CESS的协调控制策略需分析各储能单元的控制,选择自由充放优先级的BES作为主控单元采用恒压控制,其余BES采用恒功率控制参与动作响应;EV车群的具体控制框图如附图3所示,EV作为从控单元紧急参与功率调度,一般采用恒功率控制,在蓄电池储能异常时切换至恒压控制。
为防止联合储能系统频繁切换,本文设置功率阈值作为功率互济级启动条件。当子网功率超过启动抑制的阈值时,功率互济级进行网间功率互济;联合储能协调控制电动汽车和蓄电池的充放电优先级,平衡交/直流子网功率,EV和BES的优先级动作划分规则如附图4所示。
MGCC根据联合储能充放电模式和储能SOC匹配储能响应优先级。CESS的工作状态划分见表2。为避免联合储能系统频繁充放电动作,当交、直流子网的功率盈余或亏缺超过设定的动作阈值η时,联合储能参与动作消纳或支撑功率。
表2 联合储能系统工作状态划分
Tab.2 Classification of CESS working status

场景判断条件系统运行模式储能工作状态 1ΔP≥η网间盈余互济运行联合储能充电动作 2ΔP≤-η网间亏缺互济运行联合储能放电动作
3.3.1 模式1子网自主运行模式
交、直流子网总净功率为0,三种工况下的功率协调策略如下。
工况一:该工况下子网独立运行,直流子网的输出功率ΣPDC_out等于直流子网负荷ΣPDC_load,交流子网的输出功率ΣPAC_out等于交流子网负荷ΣPDC_load,交、直流子网的供需平衡。
工况二:交流子网的输出功率ΣPAC_out超过该子网负荷所需功率ΣPAC_load,交流子网盈余时其净功率ΔPAC>0,而直流子网的输出功率ΣPDC_out无法满足该子网负荷所需功率ΣPDC_load,直流子网亏缺越限时其净功率ΔPDC<0,BILC整流动作参考功率为 。
。
工况三:该工况下交流侧的净功率 ,而直流侧的净功率
,而直流侧的净功率 ,BILC工作在逆变模式,参考功率为
,BILC工作在逆变模式,参考功率为 。
。
3.3.2 模式2网间盈余互济运行模式
该模式交、直流子网总净功率为正,五种工况下的功率协调策略如下。
工况一:功率互济级仅BDAC动作,交流子网净功率 ,直流子网净功率
,直流子网净功率 ,BDAC动作在整流模式,储能消纳交流子网盈余功率。
,BDAC动作在整流模式,储能消纳交流子网盈余功率。
工况二:交流子网净功率 ,直流子网净功率,仅BDDC动作为联合储能充电。
,直流子网净功率,仅BDDC动作为联合储能充电。
工况三:交流子网净功率,直流子网净功率,BDAC整流动作、BDDC动作,CESS消纳微电网的盈余功率。
工况四:功率互济级BILC动作在逆变状态,BDDC动作为联合储能充电。即在模式1中工况三交、直流子网功率互济调节之后,直流子网仍然盈余,此时BDDC动作,参考功率为PBDDC_ref =ΔP。
工况五:功率互济级BILC动作在整流状态,BDAC动作在整流模式,即在模式1中工况二交、直流子网功率互济调节之后,交流子网仍然盈余,此时BDAC动作参考功率为PBDAC_ref =ΔP。
当ΔP≥η时,联合储能系统按照动作规则参与调节, 为仅充电车群的充电功率。车群仅充电动作;MGCC生成蓄电池储能充电参考功率
为仅充电车群的充电功率。车群仅充电动作;MGCC生成蓄电池储能充电参考功率 为
为
 (13)
(13)
蓄电池储能充电优先级依次响应。生成电动汽车群充电参考功率 ,划分在
,划分在 中的电动汽车作为灵活储能充电优先级依次响应。
中的电动汽车作为灵活储能充电优先级依次响应。
如附录中式(A6)~式(A10)所示,联合储能按照优先级依次响应,消纳交直流混合微电网盈余功率。
3.3.3 模式3网间亏缺互济运行模式
模式3联合储能参与放电动作,支撑子网亏缺功率。五种工况下的功率协调策略如下。
工况一:交流子网净功率 ,直流子网净功率,仅BDAC动作在整流模式。
,直流子网净功率,仅BDAC动作在整流模式。
工况二:交流子网净功率,直流子网净功率 ,仅BDDC动作,联合储能放电支撑直流子网亏缺功率。
,仅BDDC动作,联合储能放电支撑直流子网亏缺功率。
工况三:交流子网净功率,直流子网净功率,BDDC和BDAC同时动作传输功率,支撑微电网功率缺额。
工况四:BILC动作在逆变状态,BDAC动作,联合储能放电,即在模式1工况三交、直流子网功率互济调节之后,交流子网的净功率依然处于亏缺状态,BDAC的传输功率为PBDAC_ref =ΔP。
工况五:BILC动作在整流状态,BDDC动作,联合储能放电,即在模式1工况二交、直流子网功率互济调节之后,直流子网的净功率依然处于亏缺状态,BDDC的传输功率为PBDDC_ref =ΔP。
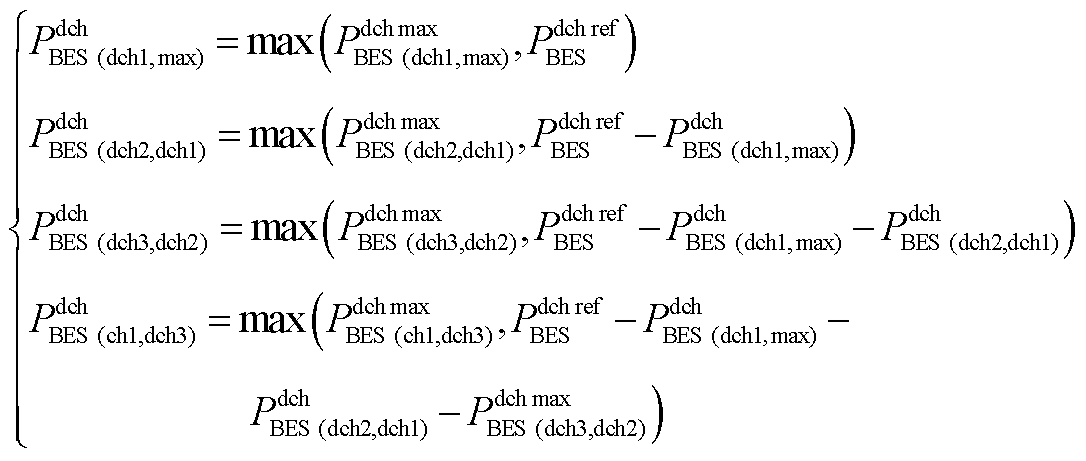
当ΔP≤-η时,联合储能系统参与调节,蓄电池储能作为主控单元优先响应,MGCC生成蓄电池放电参考功率 为
为
 (14)
(14)
蓄电池储能放电优先级依次响应。生成电动汽车群放电参考功率 ,划分在
,划分在 中的EV作为灵活储能参与紧急调节,放电优先级依次响应。
中的EV作为灵活储能参与紧急调节,放电优先级依次响应。
如附录中式(A11)~式(A15)所示,联合储能按照优先级依次响应支撑交直流混合微电网亏缺功率。
3.3.4 模式4功率越限运行模式
模式4系统功率超过联合储能系统调节最大范围,需要进行限功率和切负荷动作。动作规则要保证系统的运行模式和工况不发生变化。
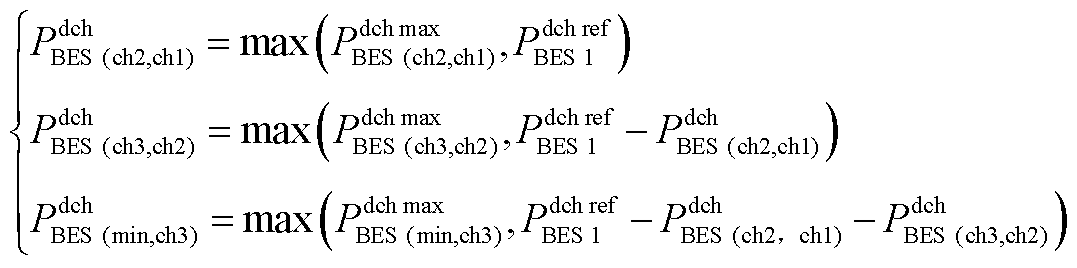
工况一:交直流混合微电网盈余越限时,联合储能可响应的蓄电池及EV全力消纳后仍有盈余功率,需要限制部分IMDG单元出力,即
 (15)
(15)
 (16)
(16)
式中, 为IMDG需要限制的功率;
为IMDG需要限制的功率; 、
、 分别为蓄电池储能和EV车群的额定充电功率;
分别为蓄电池储能和EV车群的额定充电功率; 、
、 分别为交、直流子网需要限制的功率。
分别为交、直流子网需要限制的功率。
工况二:微电网亏缺越限时,联合储能全力支撑功率仍有缺额,有
 (17)
(17)
 (18)
(18)
式中, 为系统需要切除的负荷;
为系统需要切除的负荷; 、
、 分别为蓄电池储能和电动汽车车群的额定放电功率;
分别为蓄电池储能和电动汽车车群的额定放电功率; 、
、 分别为交、直流子网需要切除的部分不重要负荷。
分别为交、直流子网需要切除的部分不重要负荷。
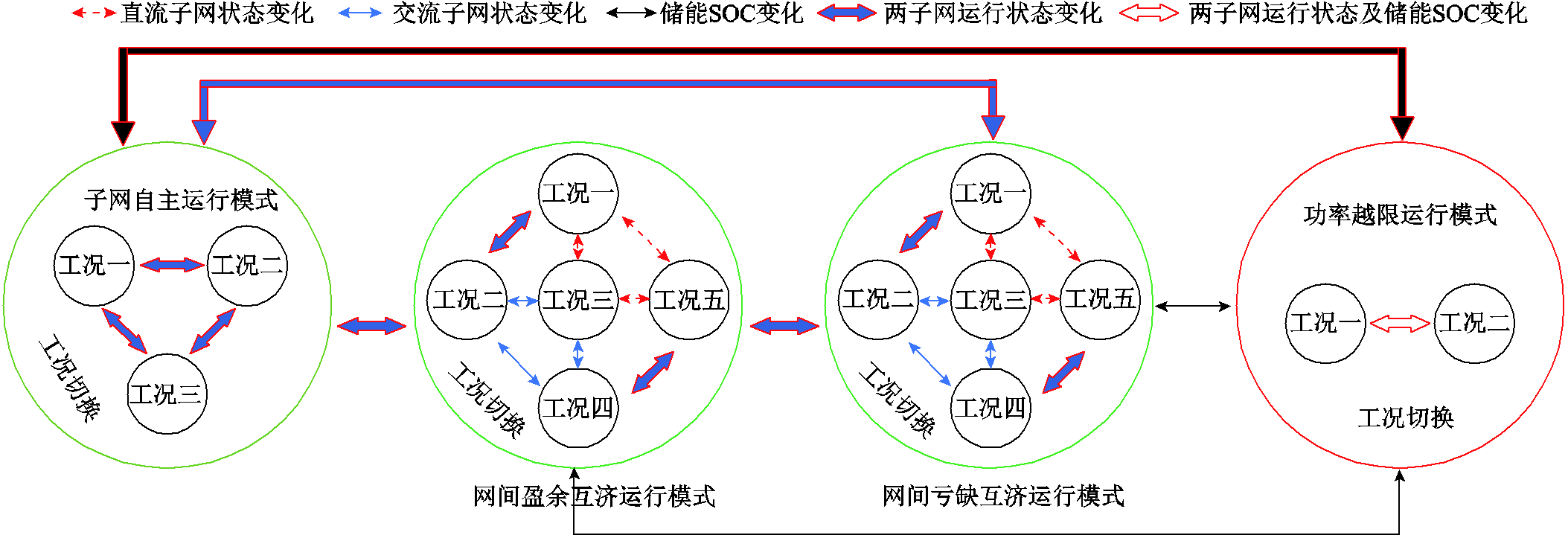
3.3.5 模式切换
交直流混合微电网模式及工况切换如附图5所示,运行模式和工况随着交、直流子网净功率的变化而切换,用不同箭头表示其工况切换的原因。此外,为了避免储能SOC因介于过充过放临界线而频繁切换,防止储能投切误动作,设置一个时间阈值作为系统的安全裕度,在储能SOC超过临界点且持续该趋势0.02 s后,切除该储能单元。
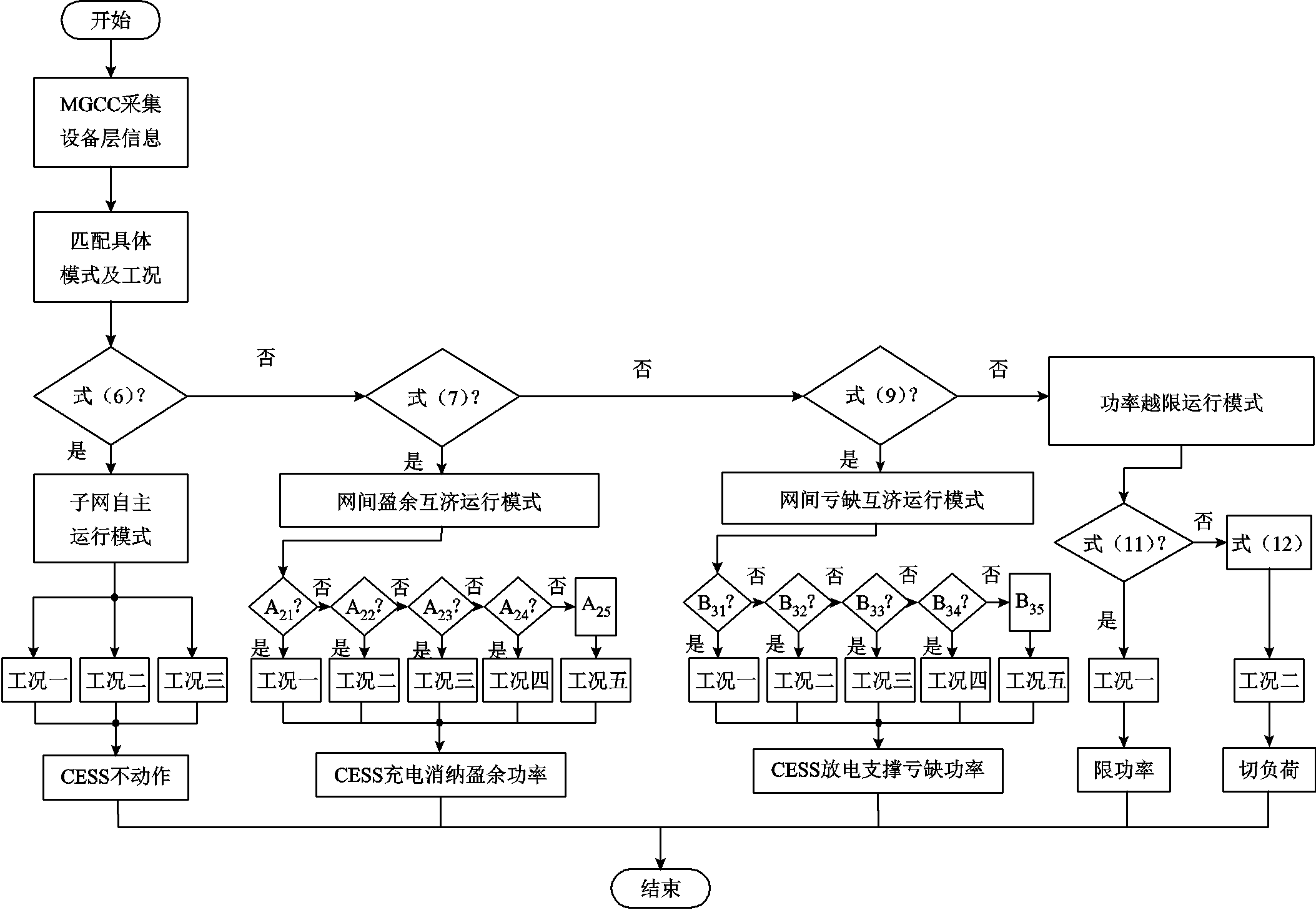
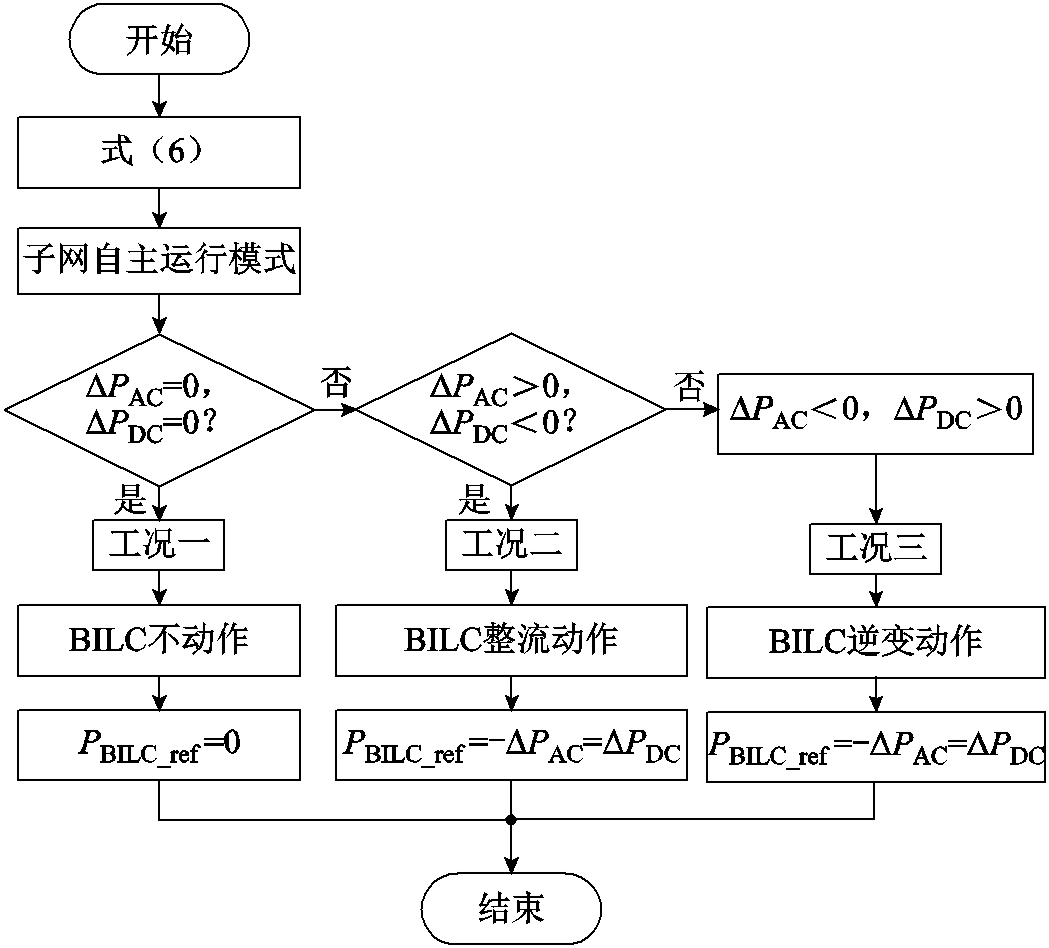
功率协调控制策略流程如附图6所示,根据交、直流子网净功率和储能SOC状态匹配运行模式及工况。其中模式1子网自主运行模式和模式2网间盈余互济运行模式功率互济级传输功率计算流程分别如附图7、附图8所示,通过匹配具体工况,制定功率互济级功率协调动作规则,并得出不同工况下的传输参考功率。
为了验证系统在MGCC正常通信下,本文所提控制策略的有效性,在Matlab/Simulink搭建了如图1所示的含联合储能系统的交直流混合微电网仿真模型。为了验证四种运行模式功率互济级的切换动作、运行模式及工况切换对交流母线频率和直流母线电压稳态性能的影响,以及功率互济级的动态协调性能和蓄电池储能SOC的动态均衡,设计仿真实验。
通过蒙特卡罗法对蓄电池储能和EV车群进行随机抽样,仅充电4辆EV,充电功率为4 kW,满足V2G行为12辆,分配到四个优先级进行充放电动作,从第一到第四优先级依次是2、4、4、2辆。对于蓄电池储能,自由充放2台储能,充电组3台储能,放电组3台储能,充放电不同优先级各1台储能;在自由充放模式选择1台蓄电池作为联合储能系统的稳压储能单元。为体现储能SOC的变化,将仿真速度加快,混合微电网系统仿真参数见附表1。
模式1子网自主运行,划分在仅充电范围的电动汽车由蓄电池提供功率。子网出力和负荷波动见附表2。子网自主运行模式仿真结果如图6所示,0~0.2 s时系统处于工况一,此时总净功率为0,交流和直流子网独立运行;0.2~0.4 s时系统处于工况二,直流负荷下降,交流负荷上升,此时BILC逆变方向传输功率,交、直流子网相互支撑;0.4~ 0.6 s时系统处于工况三,此时BILC工作在整流方向,进行功率调节;0.6~0.8 s时系统处于工况一,分析同0~0.2 s;0.8~10 s时系统处于工况二,分析同0.2~0.4 s。
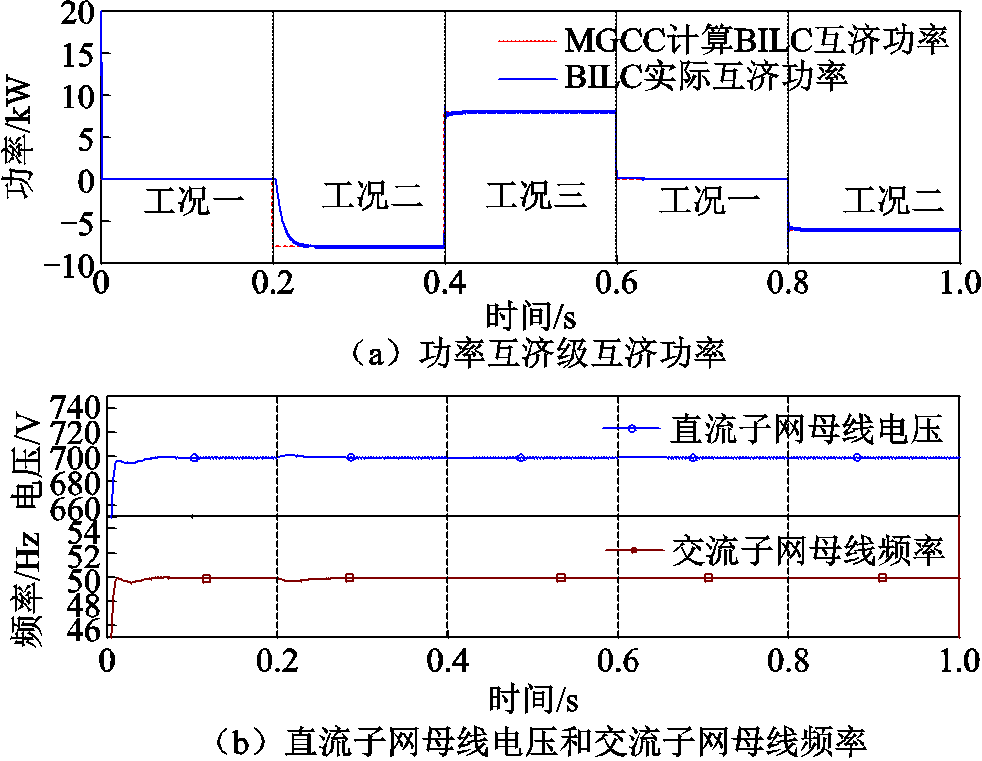
图6 子网自主运行模式仿真结果
Fig.6 Subgrid autonomous operation mode simulation results
模式2网间盈余互济运行,划分在仅充电的EV优先动作消纳微电网盈余功率,子网出力和负荷波动见附表3。网间盈余互济运行模式仿真结果如图7所示,0~0.2 s时系统处于工况一,直流子网独立运行,BDAC整流消纳交流子网盈余32 kW功率;0.2~0.4 s时系统处于工况五,直流子网功率亏缺6 kW,交流子网盈余29 kW,此时BILC优先动作整流,BDAC整流方向传输功率;0.4~0.6 s时系统处于工况二,交流子网独立运行,此时BDDC消纳盈余47 kW功率;0.6~0.8 s时系统处于工况三,此时BDAC和BDDC传输交流和直流子网盈余功率;0.8~1.0 s时系统处于工况四,分析和0.4~0.6 s时工况二类似。如图7b、图7c所示,BES第一放电优先级在0.78 s时,以及第二、三放电优先级在0.98 s时,储能SOC超出过充临界点并持续0.02 s后,分别在0.8 s和1.0 s将其切除,储能切除线为Smax=95%;EV第四充电优先级在0.78 s时,储能SOC超出过充临界点并持续0.02 s后,在0.8 s时切除储能。
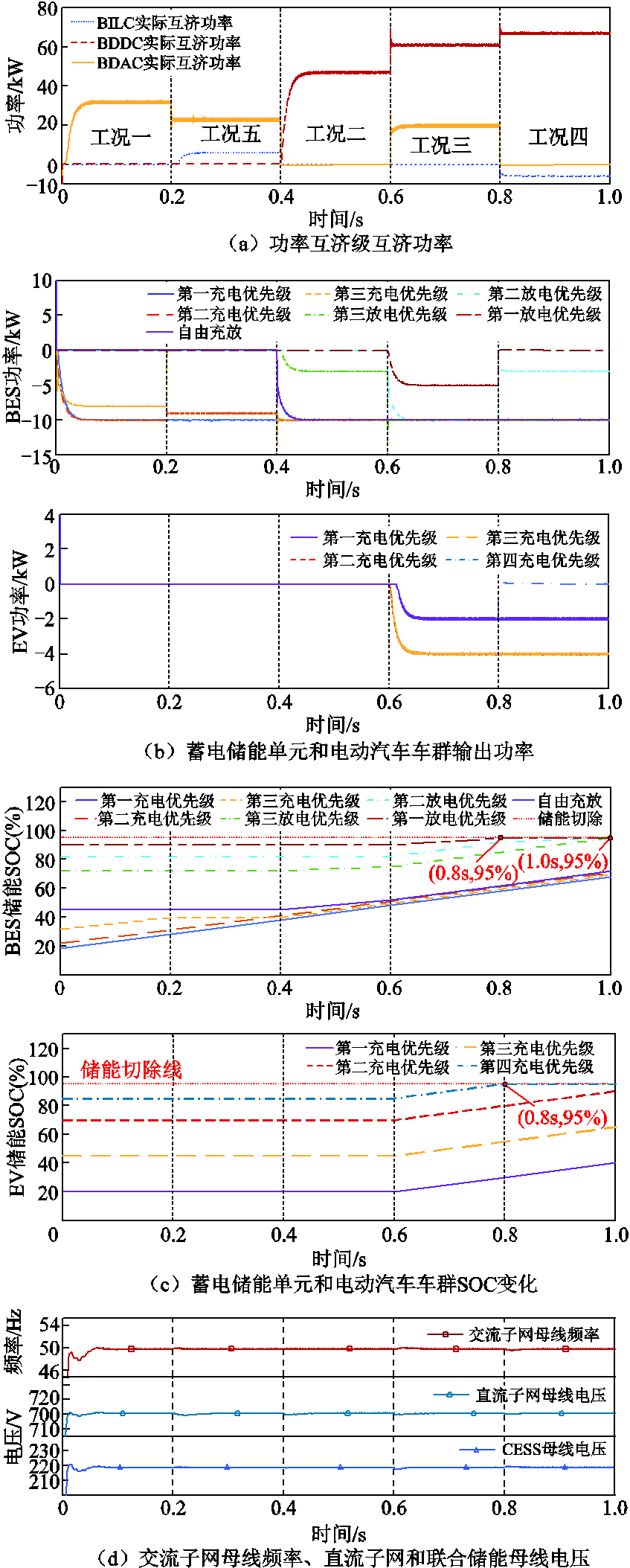
图7 网间盈余互济运行模式仿真结果
Fig.7 Inter-network surplus mutual assistance operation mode simulation results
模式3网间亏缺互济运行,划分在仅充电范围的EV由蓄电池储能提供,子网出力和负荷波动见附表4。网间亏缺互济运行模式仿真结果如图8所示,0~0.2 s时系统处于工况三,此时储能通过BDDC和BDAC传输功率支撑功率缺额;0.2~0.4 s时系统处于工况五,直流子网功率亏缺148 kW,交流子网盈余28 kW,此时BILC优先动作,剩余亏缺功率由储能提供;0.4~0.6 s时系统处于工况四,分析同0.2~0.4 s时工况五类似;0.6~0.8 s时系统处于工况二,交流子网独立运行,直流子网功率亏缺100 kW,此时BDDC传输功率补充直流子网功率缺额;0.8~1.0 s时系统处于工况一,分析和0.6~0.8 s时工况二类似。
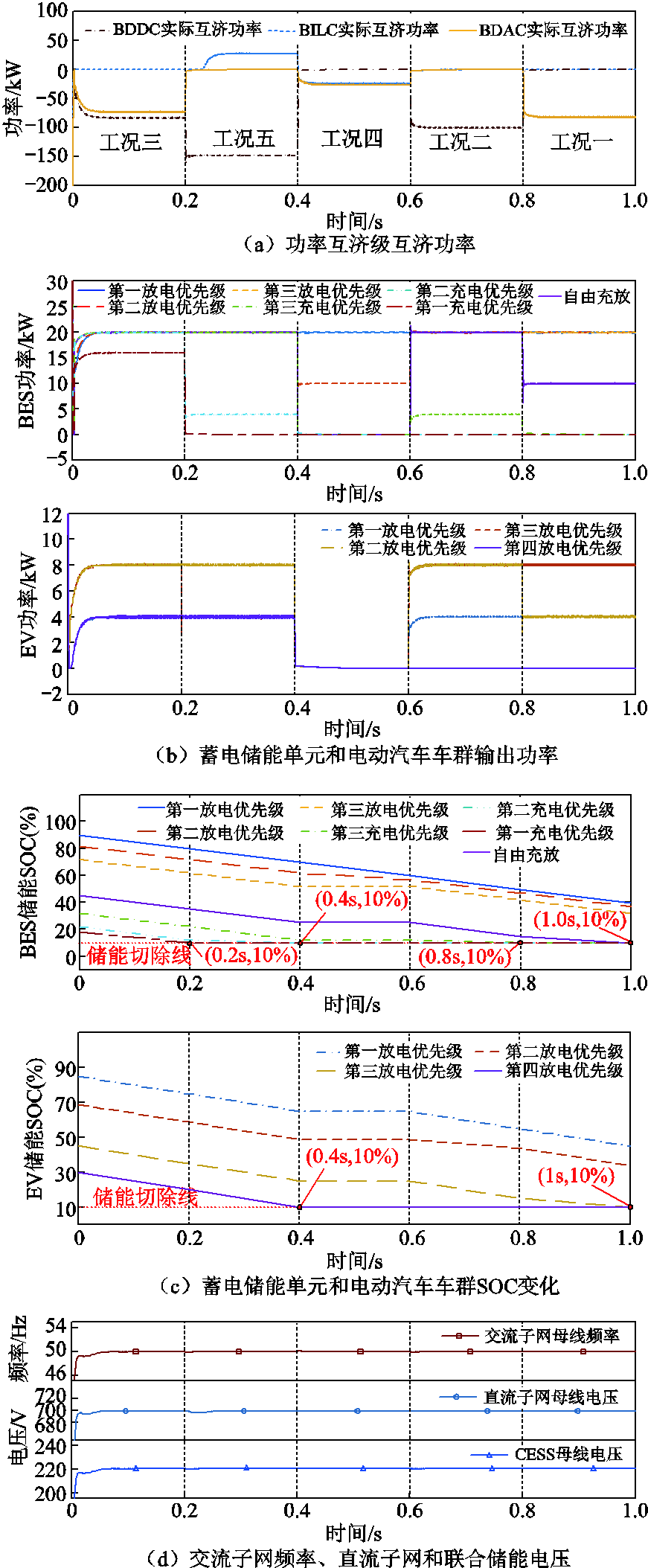
图8 网间亏缺互济运行模式仿真结果
Fig.8 Inter-network deficit mutual assistance operation mode simulation results
如图8b、图8c所示,BES第一放电优先级在0.16 s时,SOC低于过放临界点并持续0.02 s储能切除,同理,其第二和第三放电、自由充放优先级分别在0.4 s、0.8 s、1.0 s时切除,储能切除线为Smin=10%;电动汽车第四放电优先级在0.38 s时,SOC低于过放临界点并持续0.02 s后切除储能,同理,第三放电优先级在1.0 s时切除。
模式4功率越限运行,仅充电EV充电功率来源需要判断系统的盈余和亏缺,并与模式2模式3相同,子网出力和负荷波动见附表5。仿真结果如图9所示,0~0.2 s时系统处于模式2工况三,BDDC传输39 kW、BDAC传输42 kW,消纳盈余功率;0.2~0.4 s时系统处于模式2工况四,此时功率盈余越限需要限制出力,直流子网盈余92 kW,交流子网亏缺4 kW,限制直流子网出力,限制之后直流子网盈余71 kW;0.4~0.6 s时系统处于模式3工况三,此时功率亏缺越限需要切除负荷,直流子网亏缺121 kW,交流子网亏缺71 kW,交流和直流子网同时切除16 kW负荷;0.6~0.8 s时系统处于模式3工况五,BILC传输功率8 kW,BDDC传输功率160 kW;0.8~1.0 s时系统处于模式3工况三,直流和交流子网同时切除22 kW负荷,分析与0.4~0.6 s时类似。
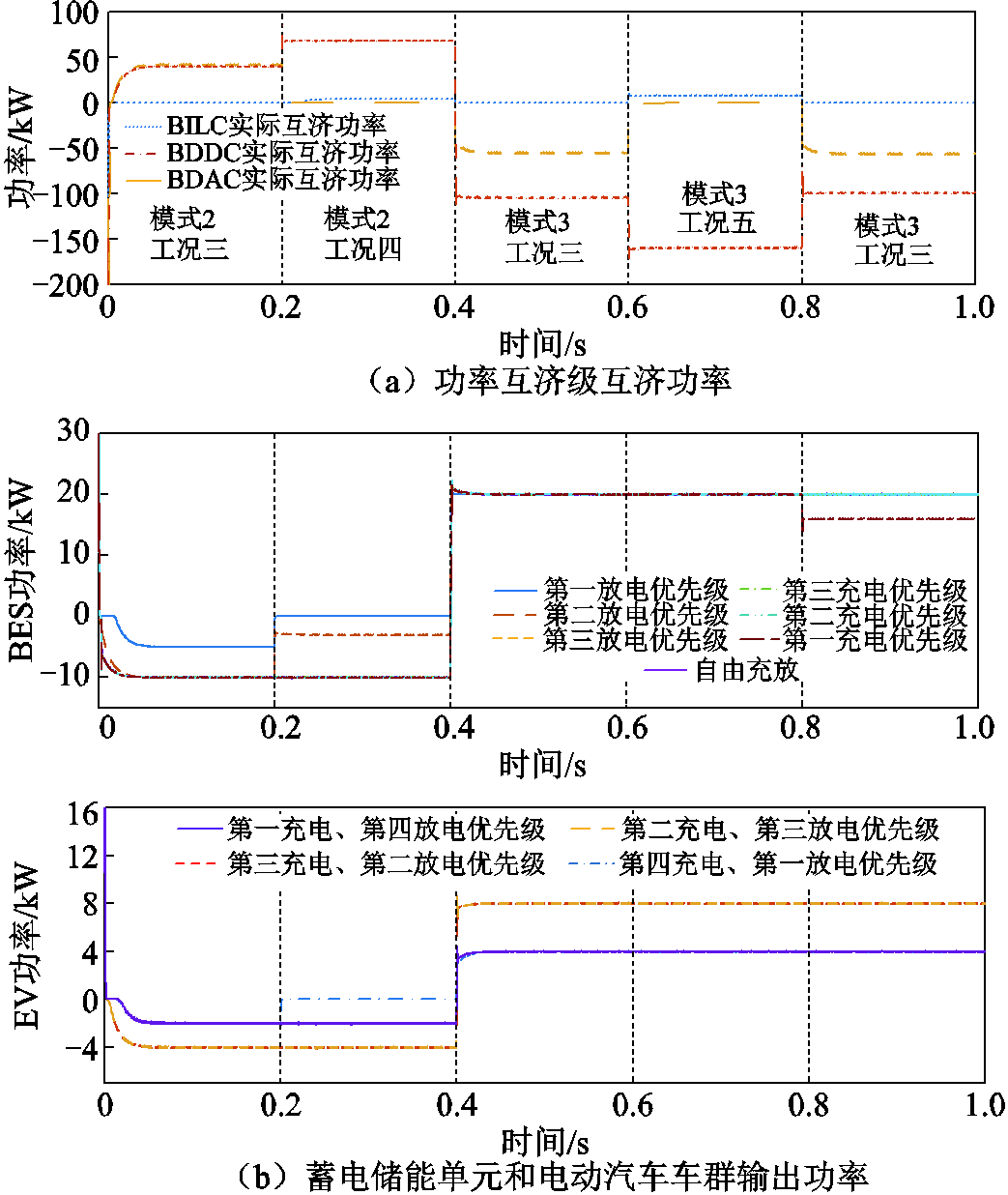
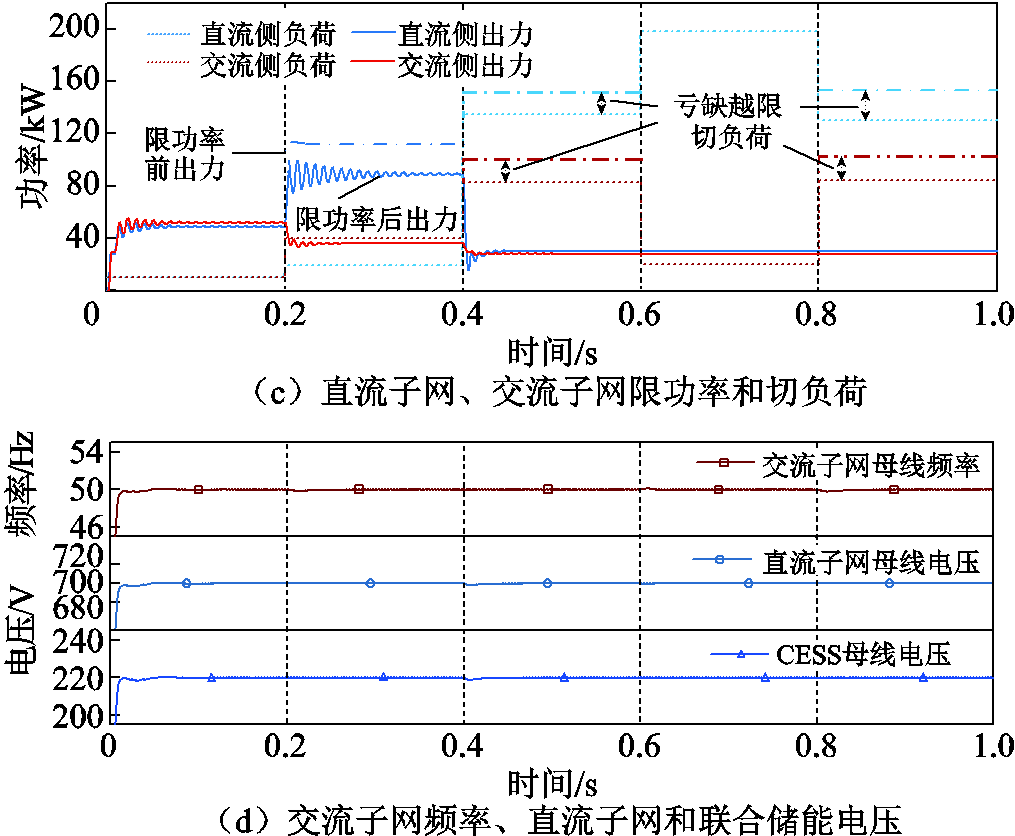
图9 功率越限运行模式仿真结果
Fig.9 Power over limit operation mode simulation results
在运行模式间切换时,划分在仅充电的EV充电功率来源需要判断系统的盈余和亏缺,并与模式2模式3保持相同,子网出力和负荷波动见附表6。仿真结果如图10所示,0~0.2 s时系统处于模式1工况二,此时BILC动作;0.2~0.4 s时系统处于模式2工况四,此时BILC逆变补充交流子网亏缺功率,BDDC动作消纳直流子网盈余功率;0.4~0.6 s时系统处于模式2工况四,分析同0.2~0.4 s时类似;0.6~0.8 s时系统处于模式3工况五,此时BILC整流方向消纳交流子网盈余,BDDC传输144 kW功率支撑直流子网亏缺功率;0.8~1.0 s时系统处于模式3工况三,BDAC和BDDC分别为交流和直流子网传输104、50 kW功率。
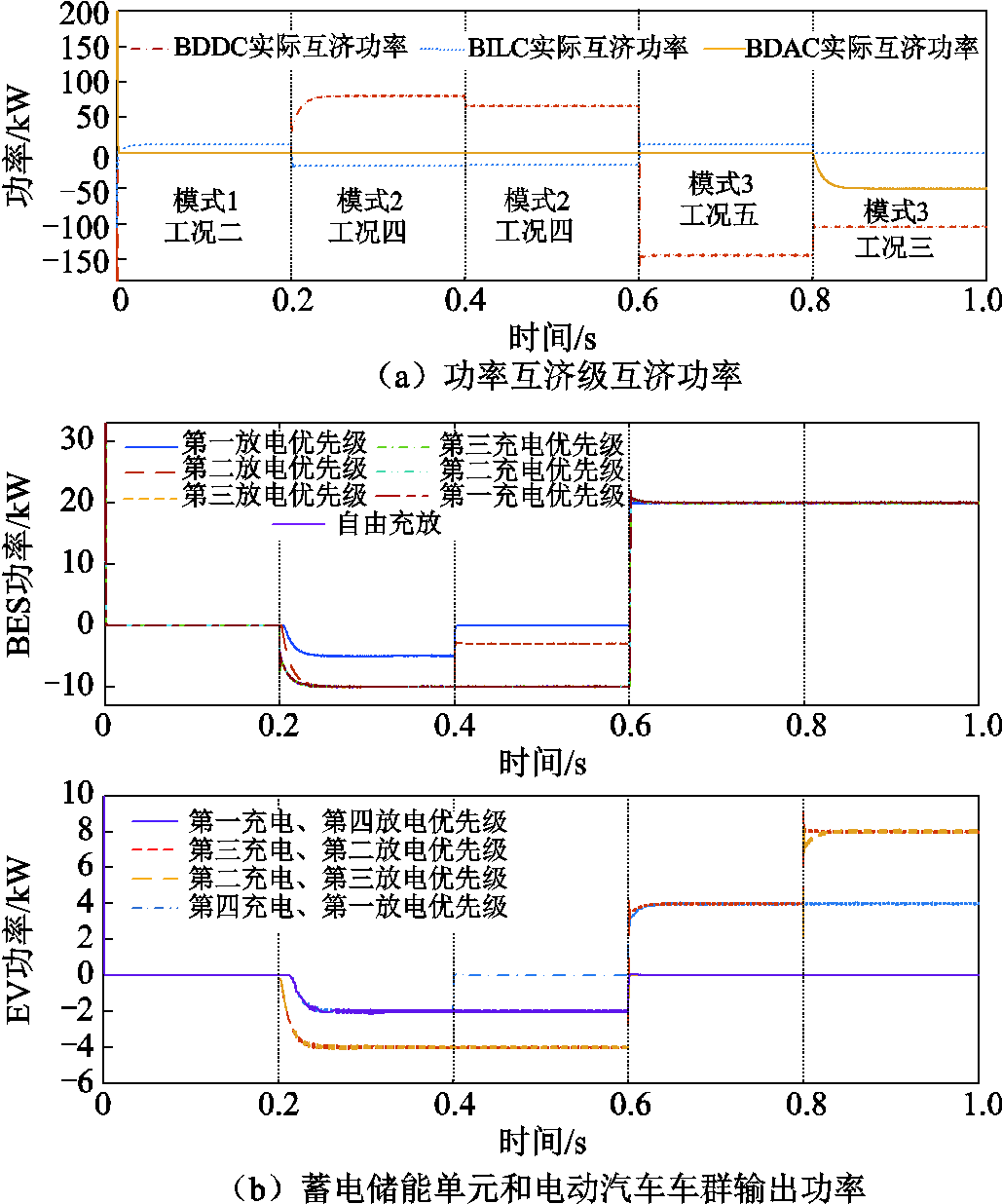
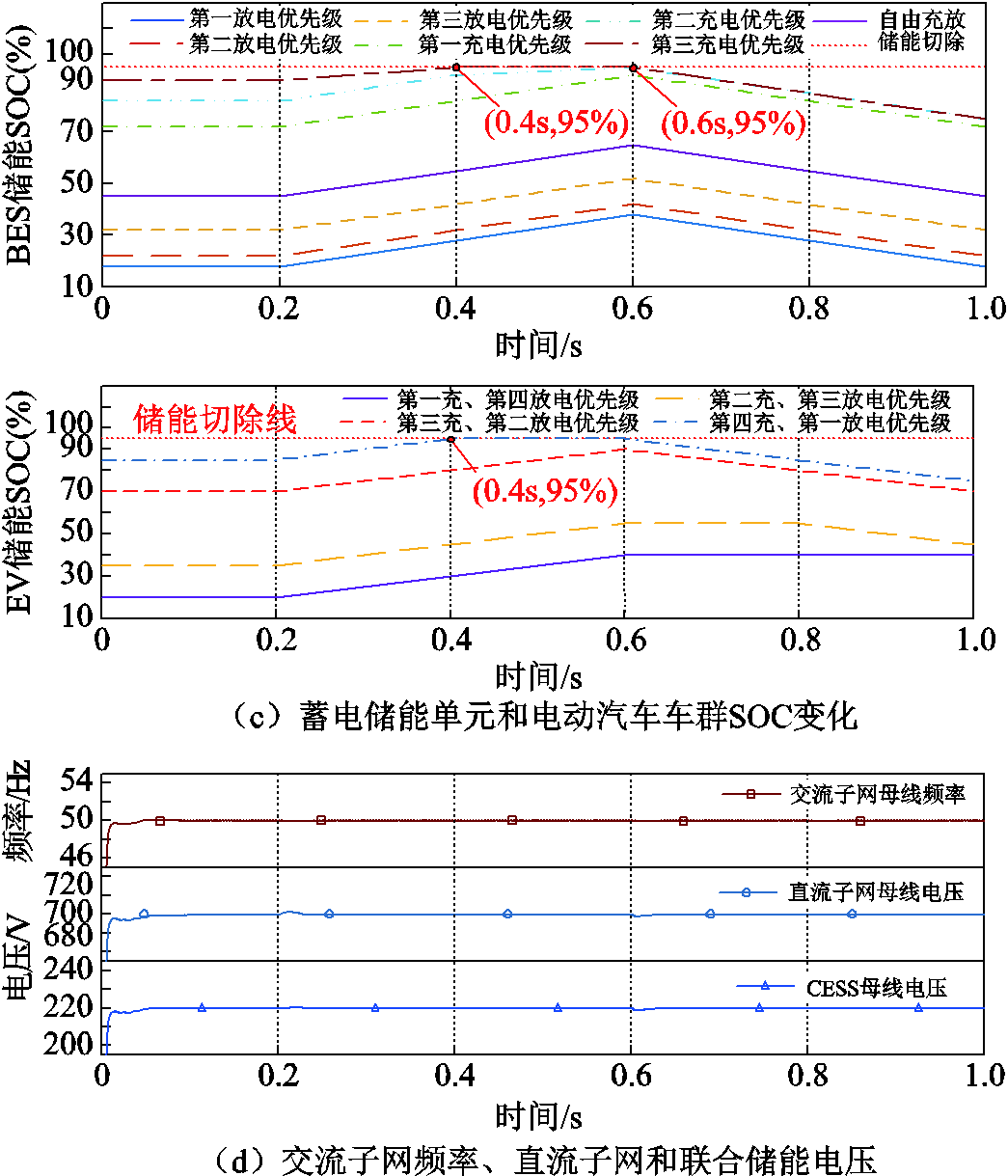
图10 运行模式间切换仿真
Fig.10 Operation mode handoff simulation diagram
如图10b、图10c所示,蓄电池储能第三充电优先级在0.16 s时,SOC超过过充临界点并持续0.02 s切除储能,第四充电优先级在0.6 s时切除;同理,电动汽车第四充电优先级在0.4 s时切除。
本文将EV和BES组成的联合储能系统接入交直流混合微电网,提出一种功率协调控制策略,通过理论分析和仿真验证可以得出以下结论:
1)针对交直流混合微电网传统分散储能分布于交、直流子网,需要额外的充放电控制来平衡不同子网间储能SOC的问题,本文将CESS通过BDAC和BDDC分别连接交、直流子网,设计蓄电池响应优先级和功率协调策略均衡SOC,避免储能交互损耗,并分担了连接交、直流子网的接口变换器BILC的功率传输压力。
2)针对仅依靠功率互济级控制进行网间功率传输无法满足工况灵活运行的问题,本文在分层控制的基础上,通过MGCC进行功率协调控制,制定动作规则,灵活控制储能动作,设置动作阈值来防止储能频繁动作,并进行仿真,验证系统在不同模式工况下网间的功率协调能够稳定运行。
3)针对单一储能无法满足各种复杂场景下储能多元化需求的问题,本文设置CESS响应优先级和动作规则,将EV作为灵活储能接入交直流混合微电网,延缓BES过充过放趋势,并通过EV和BES协调配合,保证CESS灵活响应动作。
附 录
交流子网DPDG单元的下垂控制可以表示为
 (A1)
(A1)
 (A2)
(A2)
式中,Pac和Qac分别为交流子网的有功和无功功率;fac和Vac分别为交流子网的母线频率和电压;a1和a2分别为有功和无功下垂系数;下标max、min、ref分别表示变量的最大值、最小值、参考值。
直流子网DPDG单元的下垂控制可以表示为
 (A3)
(A3)
式中,Pdc为直流子网的输出功率;Pdc,ref为直流子网输出功率的参考值;Udc为直流子网的母线电压;b为直流子网DPDG单元的下垂系数。
f和U的大小能够反映各子网的功率盈余和亏缺的状态,因此对子网的特征量进行归一化处理,有
 (A4)
(A4)
式中,δ*为子网特征量δ的标幺值;δmax和δmin分别为δ所允许波动范围的最大值和最小值。
通过两子网特征量标幺值f*和U*的差值可以得到参考功率Pref为
 (A5)
(A5)
式中,k为下垂系数,且规定整流方向为正方向。
模式2网间盈余互济模式下,ΔP≥η,蓄电池储能充电优先级优先动作。
 (A6)
(A6)
式中, 、
、 、
、 、
、 分别为第一、第二、第三充电优先级及自由充放单元的充电功率;
分别为第一、第二、第三充电优先级及自由充放单元的充电功率; 、
、 、
、 、
、 分别为为第一、第二、第三充电优先级及自由充放单元的额定充电功率。
分别为为第一、第二、第三充电优先级及自由充放单元的额定充电功率。
蓄电池储能充电优先级动作之后
 ,蓄电池储能的放电优先级参与动作。
,蓄电池储能的放电优先级参与动作。
 (A7)
(A7)
 (A8)
(A8)
式中, 、
、 、
、 分别为第三、第二、第一放电优先级的充电功率;
分别为第三、第二、第一放电优先级的充电功率; 、
、 、
、 分别为第三、第二、第一放电优先级的额定充电功率。此时,蓄电池储能的充电参考功率为
分别为第三、第二、第一放电优先级的额定充电功率。此时,蓄电池储能的充电参考功率为 。
。
蓄电池储能放电优先级动作之后,
 ,为避免蓄电池储能单元过充,此时电动汽车群按照充电响应优先级动作参与功率调节。
,为避免蓄电池储能单元过充,此时电动汽车群按照充电响应优先级动作参与功率调节。
 (A9)
(A9)
 (A10)
(A10)
式中, 、
、 、
、 、
、 分别为电动汽车群第一、第二、第三、第四充电优先级的充电功率;
分别为电动汽车群第一、第二、第三、第四充电优先级的充电功率; 、
、 、
、 、
、 分别为电动汽车群第一、第二、第三、第四充电优先级的额定充电功率。
分别为电动汽车群第一、第二、第三、第四充电优先级的额定充电功率。
模式3网间亏缺互济模式下,ΔP≤-η,蓄电池储能放电优先级优先动作。
 (A11)
(A11)
式中, 、
、 、
、 、
、 分别为第一、第二、第三放电优先级以及自由充放单元的放电功率;
分别为第一、第二、第三放电优先级以及自由充放单元的放电功率; 、
、 、
、 、
、 分别为为第一、第二、第三放电优先级以及自由充放单元的额定放电功率。
分别为为第一、第二、第三放电优先级以及自由充放单元的额定放电功率。
蓄电池储能放电优先级动作之后 ,蓄电池储能的充电优先级参与放电动作。
,蓄电池储能的充电优先级参与放电动作。

 (A13)
(A13)
附图1 BILC和BDAC控制框图
App.Fig.1 Block diagram of the BILC and BDAC control
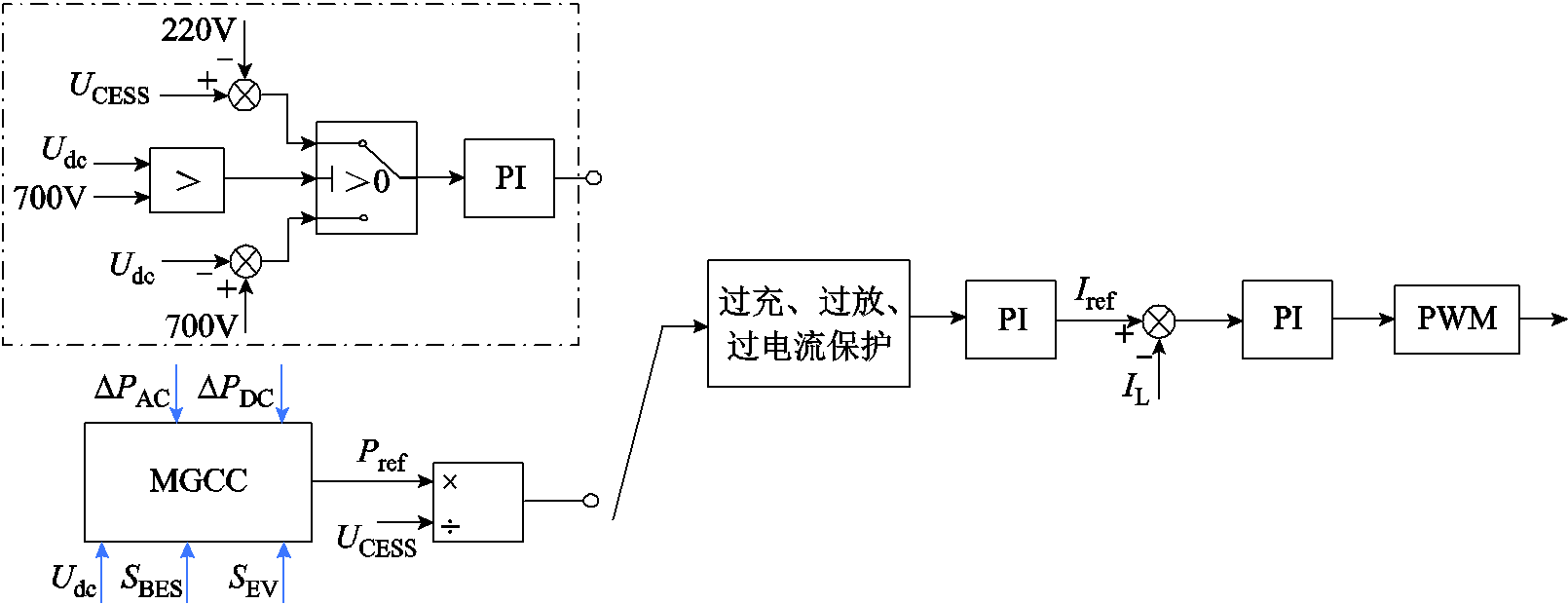
附图2 BDDC控制框图
App.Fig.2 Block diagram of the BDDC control
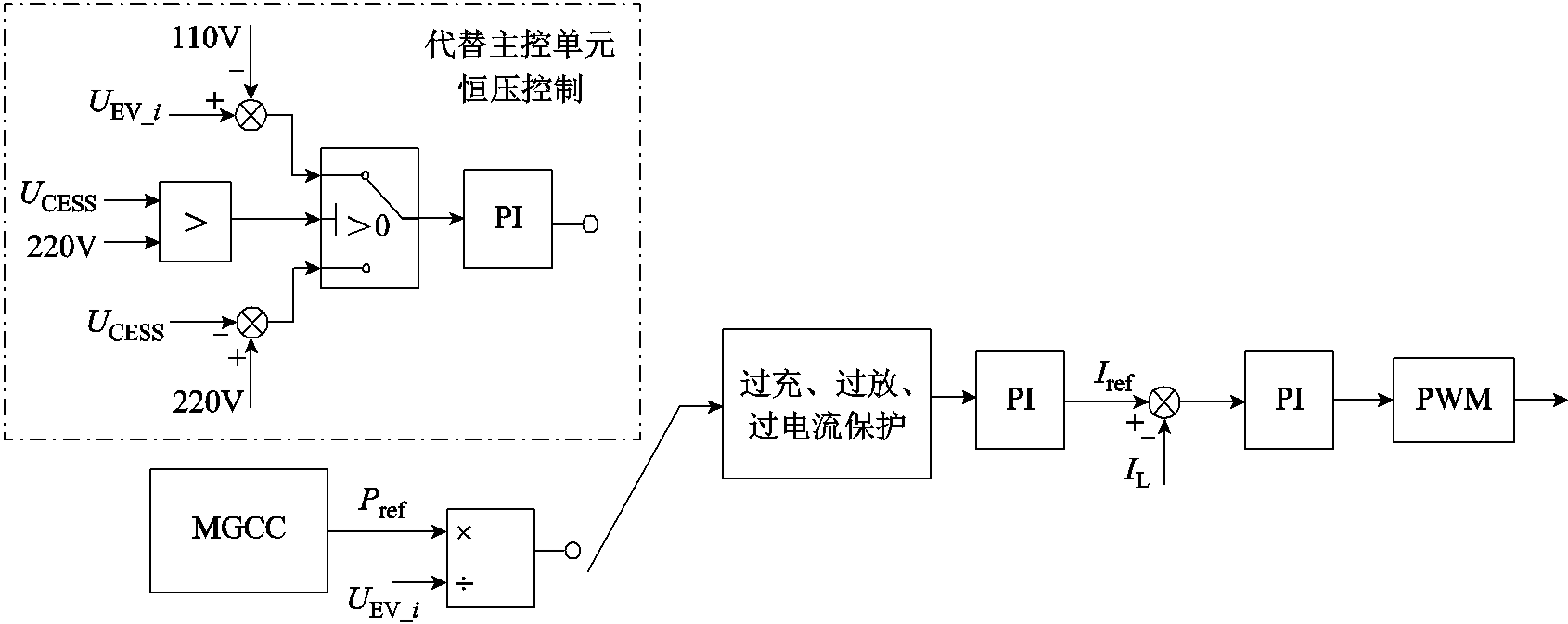
附图3 EV车群控制框图
App.Fig.3 Block diagram of the EV vehicle group control
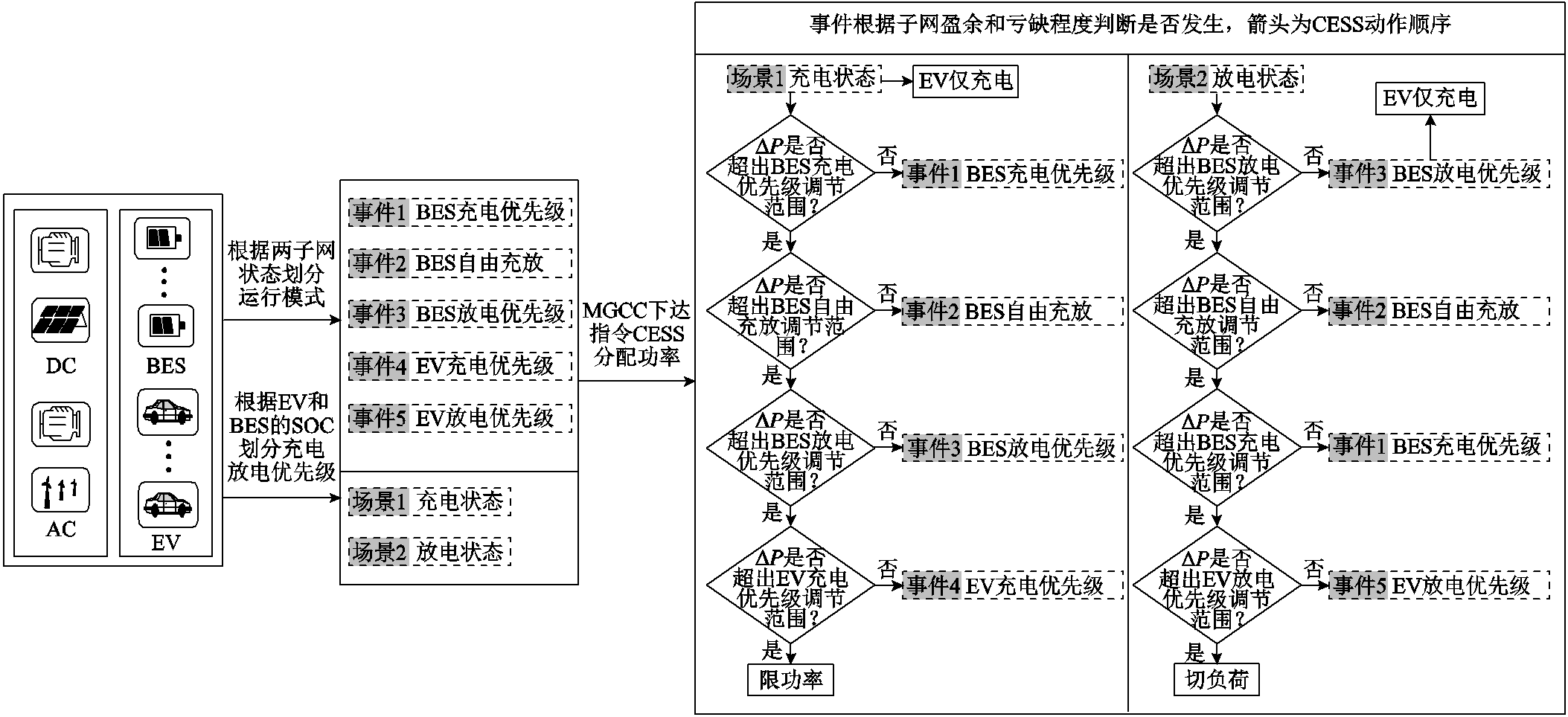
附图4 CESS动作划分规则
App.Fig.4 CESS action division rules
式中, 、
、 、
、 分别为第三、第二、第一充电优先级的放电功率;
分别为第三、第二、第一充电优先级的放电功率; 、
、 、
、 分别为第三、第二、第一充电优先级的额定放电功率。此时蓄电池储能的放电参考功率为
分别为第三、第二、第一充电优先级的额定放电功率。此时蓄电池储能的放电参考功率为 。
。
蓄电池储能充电优先级动作之后 ,为避免蓄电池储能单元过放,此时电动汽车群按照放电响应优先级参与功率调节。
,为避免蓄电池储能单元过放,此时电动汽车群按照放电响应优先级参与功率调节。
 (A14)
(A14)
 (A15)
(A15)
式中, 、
、 、
、 、
、 分别为电动汽车群第一、第二、第三、第四放电优先级的放电功率;
分别为电动汽车群第一、第二、第三、第四放电优先级的放电功率; 、
、 、
、 、
、 分别为电动汽车群第一、第二、第三、第四放电优先级的额定放电功率。
分别为电动汽车群第一、第二、第三、第四放电优先级的额定放电功率。
附图5 交直流混合微电网模式及工况切换
App.Fig.5 AC/DC hybrid microgrid mode and working condition switching diagram
附图6 功率协调控制策略流程
App.Fig.6 Power coordination control strategy flow chart
附图7 子网自主运行模式功率互济级传输功率计算流程
App.Fig.7 Subgrid autonomous operation mode power mutual class transmission power calculation flow chart
附表1 交直流混合微电网系统的仿真参数
App.Tab.1 Simulation coefficients for AC/DC hybrid microgrid system
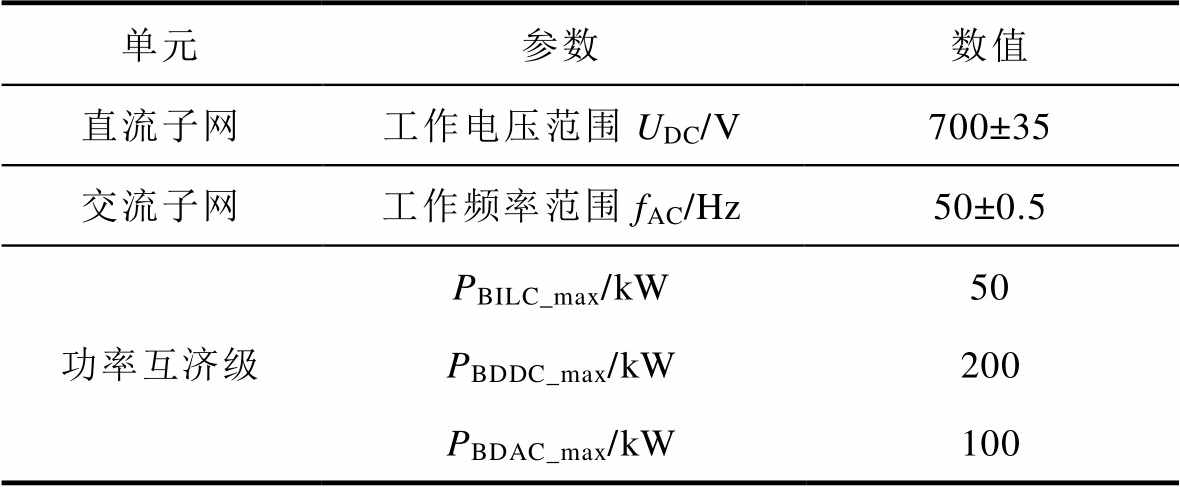
单元参数数值 直流子网工作电压范围UDC/V700±35 交流子网工作频率范围fAC/Hz50±0.5 功率互济级PBILC_max/kW50 PBDDC_max/kW200 PBDAC_max/kW100
(续)
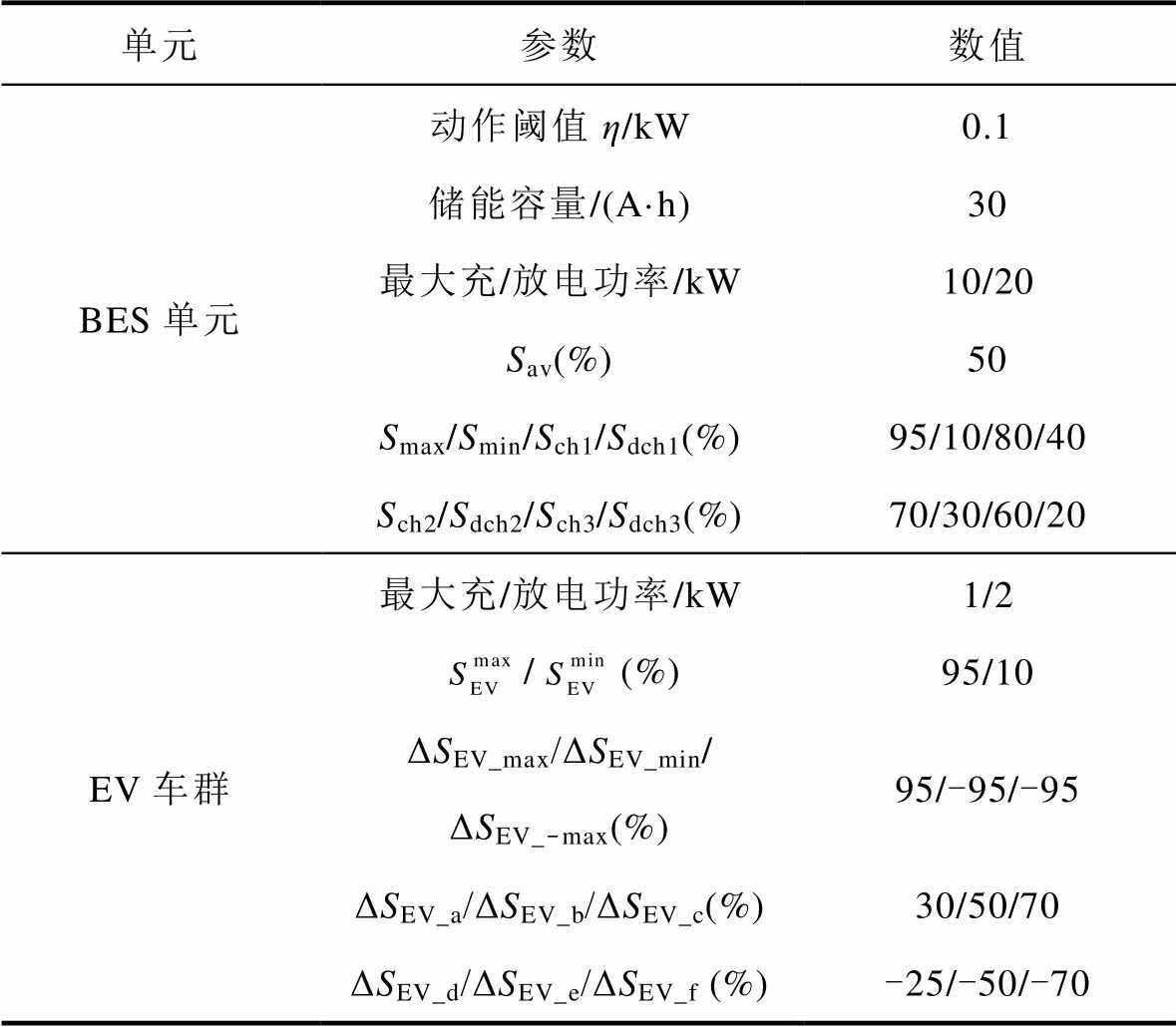
单元参数数值 BES单元动作阈值η/kW0.1 储能容量/(A·h)30 最大充/放电功率/kW10/20 Sav(%)50 Smax/Smin/Sch1/Sdch1(%)95/10/80/40 Sch2/Sdch2/Sch3/Sdch3(%)70/30/60/20 EV车群最大充/放电功率/kW1/2 /(%)95/10 ΔSEV_max/ΔSEV_min/ΔSEV_-max(%)95/-95/-95 ΔSEV_a/ΔSEV_b/ΔSEV_c(%)30/50/70 ΔSEV_d/ΔSEV_e/ΔSEV_f(%)-25/-50/-70
附表2 子网自主运行模式出力和负荷波动
App.Tab.2 Subgrid autonomous operation mode: output and load fluctuation
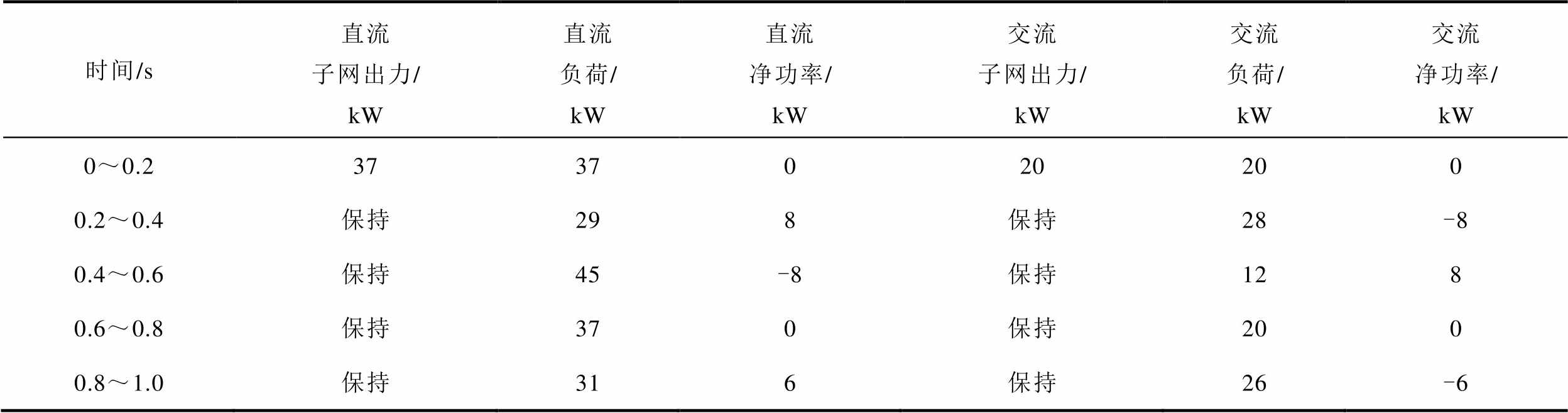
时间/s直流子网出力/kW直流负荷/kW直流净功率/kW交流子网出力/kW交流负荷/kW交流净功率/kW 0~0.23737020200 0.2~0.4保持298保持28-8 0.4~0.6保持45-8保持128 0.6~0.8保持370保持200 0.8~1.0保持316保持26-6
附图8 网间盈余互济运行模式功率互济级传输功率计算流程
App.Fig.8 Inter-network surplus mutual assistance operation mode power mutual class transmission power calculation flow chart
附表3 网间盈余互济运行模式出力和负荷波动
App.Tab.3 Inter-network surplus mutual assistance operation mode: output and load fluctuation
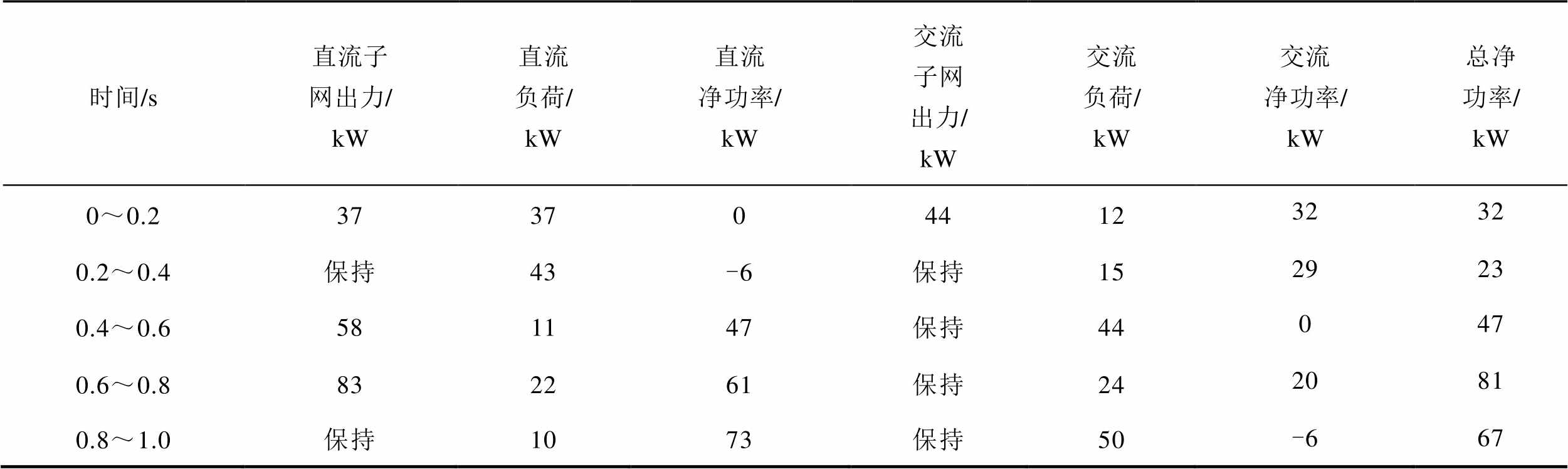
时间/s直流子网出力/kW直流负荷/kW直流净功率/kW交流子网出力/kW交流负荷/kW交流净功率/kW总净功率/kW 0~0.23737044123232 0.2~0.4保持43-6保持152923 0.4~0.6581147保持44047 0.6~0.8832261保持242081 0.8~1.0保持1073保持50-667
附表4 网间亏缺互济运行模式出力和负荷波动
App.Tab.4 Inter-network deficit mutual assistance operation mode: output and load fluctuation
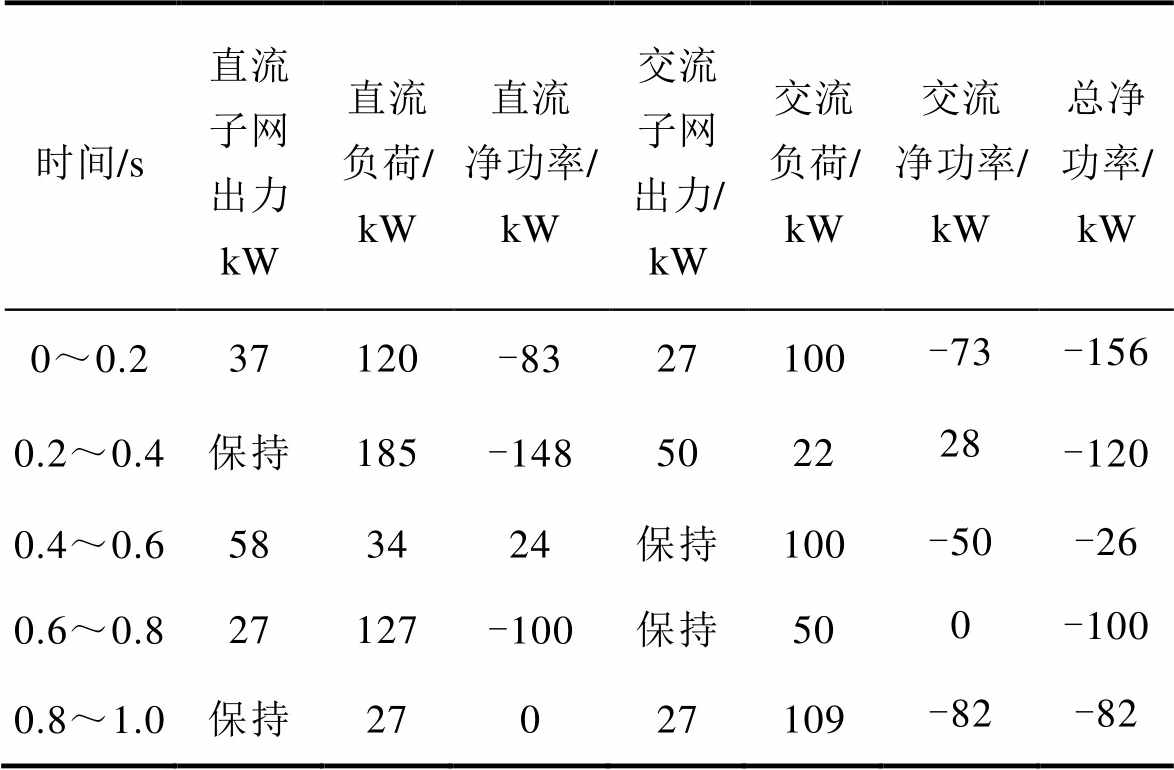
时间/s直流子网出力kW直流负荷/kW直流净功率/kW交流子网出力/kW交流负荷/kW交流净功率/kW总净功率/kW 0~0.237120-8327100-73-156 0.2~0.4保持185-148502228-120 0.4~0.6583424保持100-50-26 0.6~0.827127-100保持500-100 0.8~1.0保持27027109-82-82
附表5 功率越限运行模式出力和负荷波动
App.Tab.5 Power over limit operation mode: output and load fluctuation
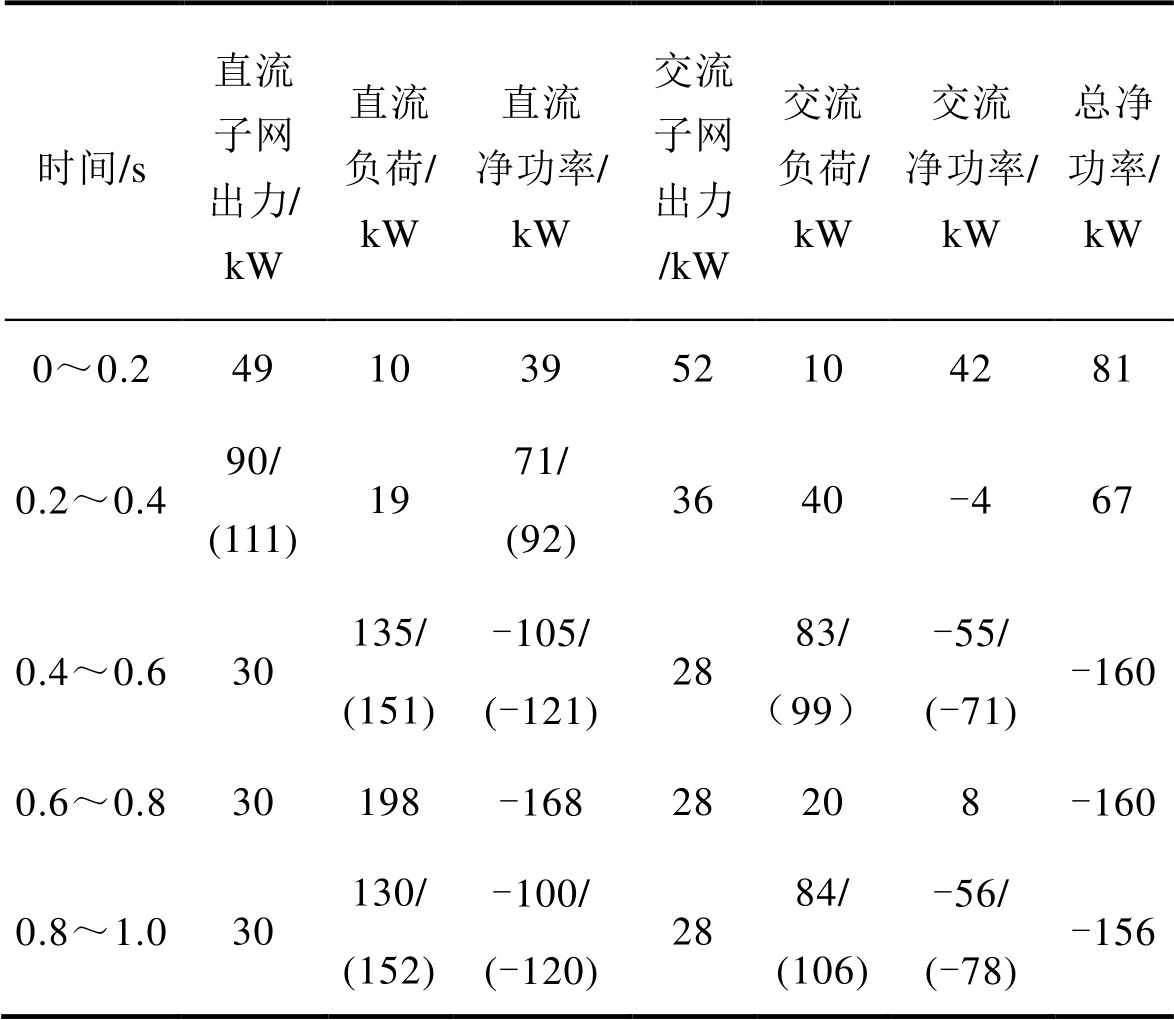
时间/s直流子网出力/kW直流负荷/kW直流净功率/kW交流子网出力/kW交流负荷/kW交流净功率/kW总净功率/kW 0~0.249103952104281 0.2~0.490/(111)1971/(92)3640-467 0.4~0.630135/(151)-105/(-121)2883/(99)-55/(-71)-160 0.6~0.830198-16828208-160 0.8~1.030130/(152)-100/(-120)2884/(106)-56/(-78)-156
注:括号内是为未限制出力前的功率或未切除负荷前的负荷。
附表6 运行模式间切换出力和负荷波动
App.Tab.6 Switching output and load fluctuations between operating modes
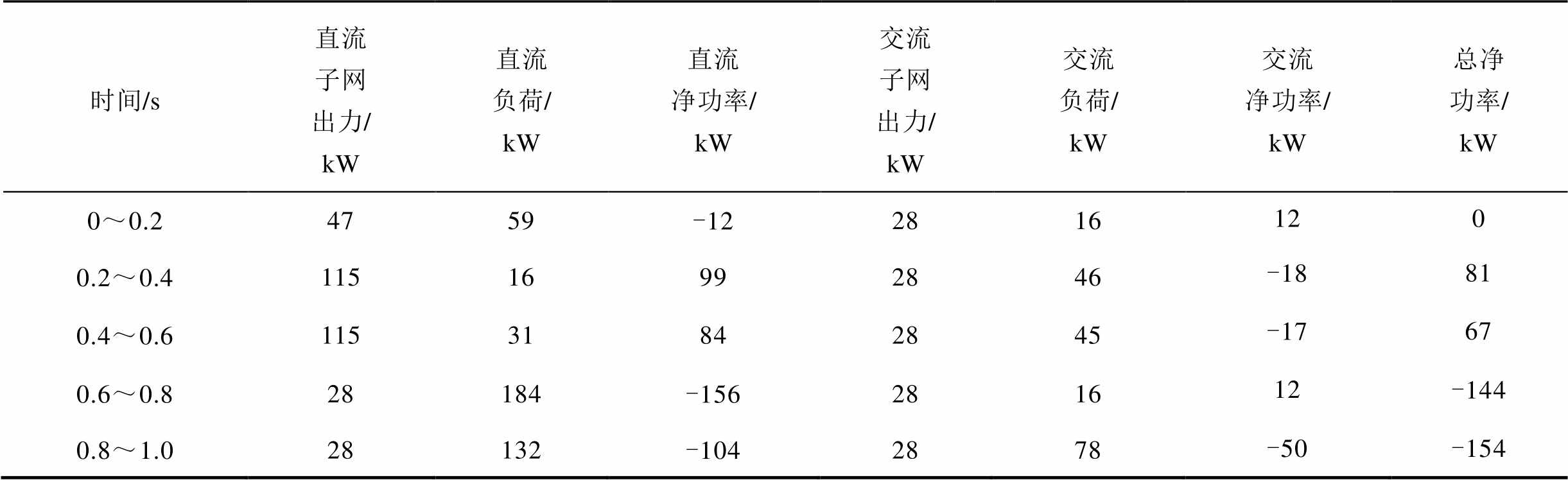
时间/s直流子网出力/kW直流负荷/kW直流净功率/kW交流子网出力/kW交流负荷/kW交流净功率/kW总净功率/kW 0~0.24759-122816120 0.2~0.411516992846-1881 0.4~0.611531842845-1767 0.6~0.828184-156281612-144 0.8~1.028132-1042878-50-154
参考文献
[1] 吴珊, 边晓燕, 张菁娴, 等. 面向新型电力系统灵活性提升的国内外辅助服务市场研究综述[J]. 电工技术学报, 2023, 38(6): 1662-1677.
Wu Shan, Bian Xiaoyan, Zhang Jingxian, et al. A review of domestic and foreign ancillary services market for improving flexibility of new power system[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1662-1677.
[2] 杜燕, 言明明, 王鑫, 等. 交直流子网双边惯量约束下互联变流器动态功率控制策略[J]. 电力系统自动化, 2023, 47(4): 172-179.
Du Yan, Yan Mingming, Wang Xin, et al. Dynamic power control strategy for interlinking converter under bilateral inertia constraints in AC/DC subgrid[J]. Automation of Electric Power Systems, 2023, 47(4): 172-179.
[3] 田浩, 黄文焘, 余墨多, 等. 交直流混合独立微网互联变换器自适应双向下垂控制策略[J]. 中国电机工程学报, 2022, 42(19): 7063-7073.
Tian Hao, Huang Wentao, Yu Moduo, et al. Adaptive bidirectional droop control strategy for the interlinking converter in the islanding hybrid AC/DC microgrids[J]. Proceedings of the CSEE, 2022, 42(19): 7063-7073.
[4] 孔惠文, 马静, 程鹏, 等. 基于子网优先级驱动的交直流混合微网集群双向互联变流器分散式控制策略[J]. 电工技术学报, 2024, 39(9): 2667-2681.
Kong Huiwen, Ma Jing, Cheng Peng, et al. Decentralized control strategy for hybrid microgrid cluster bidirectional interlinking converters based on sub-grid priority drive[J]. Transactions of China Electrotechnical Society, 2024, 39(9): 2667-2681.
[5] 姚卫波, 徐晔, 黄克峰, 等. 基于前馈解耦的交直流混合微电网双向AC-DC变换器控制策略研究[J]. 电气技术, 2022, 23(5): 25-33.
Yao Weibo, Xu Ye, Huang Kefeng, et al. Research on bidirectional AC-DC converter feedforward decoupling control strategy of hybrid AC/DC microgrid[J]. Electrical Engineering, 2022, 23(5): 25-33.
[6] 郭慧珠, 孟鑫, 贺明智, 等. 无通信高电能质量的微电网平滑切换控制策略[J]. 电工技术学报, 2022, 37(10): 2611-2621.
Guo Huizhu, Meng Xin, He Mingzhi, et al. An enhanced power quality and smooth transition control strategy for a microgrid without remote pre-syn-chronization communication[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2611-2621.
[7] 王浩, 聂晶莹, 李斌, 等. 电网电压不平衡下交直流混合微电网互联接口变换器分数阶滑模控制策略[J]. 电力系统保护与控制, 2023, 51(16): 94-103.
Wang Hao, Nie Jingying, Li Bin, et al. Fractional order sliding mode control strategy of AC/DC hybrid microgrid interconnection interface converter under grid voltage imbalance[J]. Power System Protection and Control , 2023 , 51(16): 94-103.
[8] 米阳, 宋根新, 蔡杭谊, 等. 基于分段下垂的交直流混合微电网自主协调控制[J]. 电网技术, 2018, 42(12): 3941-3950.
Mi Yang, Song Genxin, Cai Hangyi, et al. Autonomous coordinated control of hybrid AC/DC microgrids based on segmented droop[J]. Power System Technology, 2018, 42(12): 3941-3950.
[9] 朱永强, 张泉, 刘康, 等. 交直流混合微电网分段协调控制策略[J]. 电力系统自动化, 2020, 44(6): 52-58.
Zhu Yongqiang, Zhang Quan, Liu Kang, et al. Segmented coordination control strategy for hybrid AC/DC microgrid[J]. Automation of Electric Power Systems, 2020, 44(6): 52-58.
[10] 米阳, 宋根新, 宋元元, 等. 孤岛交直流混合微电网群多级功率管理策略[J]. 电力系统自动化, 2020, 44(7): 38-45.
Mi Yang, Song Genxin, Song Yuanyuan, et al. Strategy of multi-level power management for islanded AC/DC hybrid microgrid cluster[J]. Automation of Electric Power Systems, 2020, 44(7): 38-45.
[11] 郭慧, 汪飞, 顾永文, 等. 基于电压分层控制的直流微电网及其储能扩容单元功率协调控制策略[J]. 电工技术学报, 2022, 37(12): 3117-3131.
Guo Hui, Wang Fei, Gu Yongwen, et al. Coordinated power control strategy for DC microgrid and storage expansion unit based on voltage hierarchical control[J]. Transactions of China Electrotechnical Society, 2022, 37(12): 3117-3131.
[12] Wang Guishuo, Wang Xiaoli, Wang Fuan, et al. Research on hierarchical control strategy of AC/DC hybrid microgrid based on power coordination control[J]. Applied Sciences, 2020, 10(21): 7603.
[13] 杨向真, 李玉宁, 杜燕, 等. 交直流混合微电网多模式功率协调控制策略[J]. 高电压技术, 2021, 47(4): 1262-1273.
Yang Xiangzhen, Li Yuning, Du Yan, et al. Multi-mode power coordination control strategy for AC/DC hybrid microgrid[J]. High Voltage Engineering, 2021, 47(4): 1262-1273.
[14] 王浩, 康博阳, 郑征, 等. 考虑电动汽车灵活储能的交直流混合微电网功率协调控制策略[J]. 电网技术, 2023, 47(5): 2009-2018.
Wang Hao, Kang Boyang, Zheng Zheng, et al. Power coordinated control strategy of AC-DC hybrid microgrid considering flexible energy storage for electric vehicles[J]. Power System Technology, 2023, 47(5): 2009-2018.
[15] Singh P, Lather J S. Power management and control of a grid-independent DC microgrid with hybrid energy storage system[J]. Sustainable Energy Technologies and Assessments, 2021, 43: 100924.
[16] Yadav A K, Bharatee A, Ray P K. Solar powered grid integrated charging station with hybrid energy storage system[J]. Journal of Power Sources, 2023, 582: 233545.
[17] 余洋, 张瑞丰, 陆文韬, 等. 基于稳定经济模型预测控制的集群电动汽车辅助电网调频控制策略[J]. 电工技术学报, 2022, 37(23): 6025-6040.
Yu Yang, Zhang Ruifeng, Lu Wentao, et al. Auxiliary frequency regulation control strategy of aggregated electric vehicles based on Lyapunov-based economic model predictive control[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 6025-6040.
[18] 米阳, 王鹏, 邓锦, 等. 孤岛交直流混合微电网群分层协调控制[J]. 电力系统保护与控制, 2021, 49(20): 1-8.
Mi Yang, Wang Peng, Deng Jin, et al. Hierarchical coordinated control of island AC/DC hybrid micro-grids[J]. Power System Protection and Control, 2021, 49(20): 1-8.
[19] Wang Peng, Jin Chi, Zhu Dexuan, et al. Distributed control for autonomous operation of a three-port AC/DC/DS hybrid microgrid[J]. IEEE Transactions on Industrial Electronics, 2015, 62(2): 1279-1290.
[20] 林佩怡, 米阳, 李海鹏, 等. 考虑荷电状态的交直流微电网多模式协调控制策略[J]. 电力建设, 2022, 43(10): 77-86.
Lin Peiyi, Mi Yang, Li Haipeng, et al. Multi-mode coordinated control strategy for AC/DC hybrid microgrid[J]. Electric Power Construction, 2022, 43(10): 77-86.
[21] Li Xiangke, Dong Chaoyu, Jiang Wentao, et al. An improved coordination control for a novel hybrid AC/DC microgrid architecture with combined energy storage system[J]. Applied Energy, 2021, 292: 116824.
[22] Ahmed M, Meegahapola L, Datta M, et al. A novel hybrid AC/DC microgrid architecture with a central energy storage system[J]. IEEE Transactions on Power Delivery, 2022, 37(3): 2060-2070.
Abstract In an islanded AC/DC hybrid microgrid, after electric vehicle (EV) are connected to the microgrid as flexible energy storage in a decentralized manner, insufficient consideration is given to the transmission capacity and power transfer pressure for the bidirectional interconnection interface converter (BILC) connecting the DC and AC subgrid, when the conventional energy storage state of charge (SOC) is equalized between the AC and DC subgrid. Geographically proximate energy storage units can be interconnected to form an energy storage subgrid, which is connected to a hybrid AC and DC microgrid. Sharing energy storage between AC and DC subgrid can alleviate BILC transmission pressure and provide research ideas for SOC equalization among energy storage. However, only relying on BILC to coordinate the inter-network power flow cannot satisfy the flexible operation of all working conditions. Therefore, in this paper, a power coordinated control strategy for AC/DC hybrid microgrid considering combined energy storage of electric vehicles and batteries is proposed, under a new AC/DC hybrid microgrid ring topology.
First, this paper introduces the hierarchical control structure of AC/DC hybrid microgrid containing combined energy storage, where the AC and DC buses are connected to the energy storage bus through bidirectional AC-DC converter and bidirectional DC-DC converter, respectively. Secondly, the paper delves into the coordination control layer within this hierarchical structure, and the hybrid microgrid is divided into four operation states by considering the net power of the AC and DC subgrid, also adding the maximum transmission power of the power interconnection level as a constraint. And further analyze the power transmission direction of the power mutual class and the state of the energy storage SOC, classify the specific operating conditions corresponding to different modes of the microgrid in detail. Thirdly, the combined energy storage action rules are designed by dividing the action response priorities of EV and battery storage units, and the power interactions among the AC subgrid, DC subgrid, and combined energy storage system are studied in detail, formulate the AC/DC hybrid microgrid power coordination control strategy and the switching method for different modes of operating conditions. Finally, an AC/DC hybrid microgrid simulation model is constructed based on the Matlab/Simulink simulation platform to verify the control strategy proposed in this paper.
Through simulation experiment analysis, the following conclusions can be drawn: (1) Under the ring topology of the new AC/DC hybrid microgrid, equalize the energy storage SOC by designing the combined energy storage response priority and power coordination control strategy, avoiding the interaction loss between the battery energy storage and sharing the power transmission pressure of the BILC between the AC and DC subgrid. (2) On the basis of hierarchical control, the microgrid central controller (MGCC) is used to carry out the power coordination control, coordinating the relationship between the various layers of the hybrid microgrid to ensure stable operation of the inter-grid power coordination under different modal operating conditions of the system. (3) The EV is connected to the combined energy storage as flexible energy storage, and the EV charging-discharging response priority is set for delaying-stopping the battery energy storage overcharging and overdischarging trend. Through the power coordinated control, the combined energy storage is flexibly controlled to participate in the action to maintain the AC/DC hybrid microgrid power balance.
keywords:AC/DC hybrid microgrid, combined energy storage, electric vehicle, power mutual class, response priority, coordinated control
中图分类号:TM711
DOI: 10.19595/j.cnki.1000-6753.tces.240618
河南省重点研发专项(241111241700)、河南省科技攻关项目(242102241056)、河南省高校基本科研业务费专项资金(NSFRF230419)和河南理工大学青年骨干教师资助计划(2022XQG-15)资助。
收稿日期 2024-04-22
改稿日期 2024-07-11
王 浩 男,1988年生,博士,硕士生导师,研究方向为交直流混合微电网运行与控制等。
E-mail:wangh@hpu.edu.cn(通信作者)
仵 哲 男,1999年生,硕士研究生,研究方向为含联合储能的交直流微电网协调控制。
E-mail:wuzhe19990822@163.com
(编辑 赫 蕾)