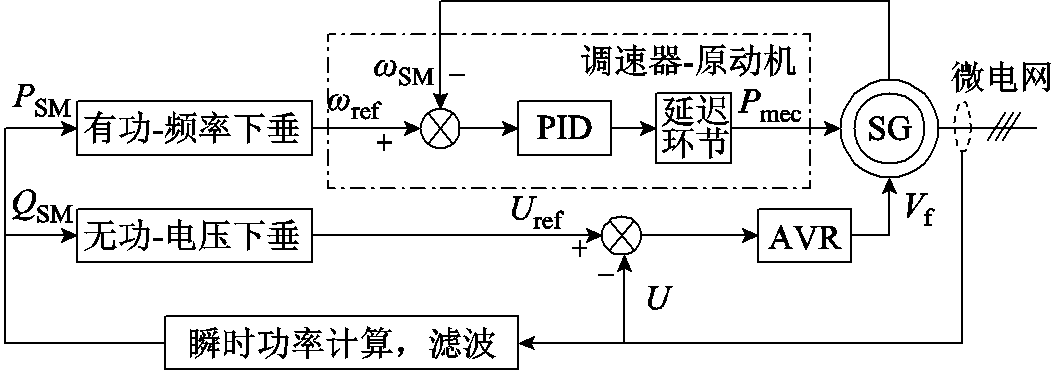
图1 SM控制框图
Fig.1 Block diagram of SM
摘要 在逆变器接口微源(IM)与同步机接口微源(SM)并存的混合型孤岛微电网中,由于两类微源的物理结构与动态特性存在差异,易导致微电网有功负荷投切暂态响应存在初始有功分配不均、响应速度慢的问题。在有功负荷突增场景下,IM在暂态初始阶段中有功输出峰值过高,易触发逆变器限流保护动作。该文首先以IM与SM并联系统为研究对象,分析两类微源有功负荷突增暂态的角频率响应差异,进一步得出造成暂态初始阶段IM输出有功峰值过高的原因。为量化并联系统响应速度,构建并联系统传递函数模型,分析系统主导极点的分布对响应速度的影响。然后,针对混合型孤岛微电网的暂态有功控制策略进行研究。在不引入通信的情况下,引入虚拟电抗法调节初始有功分配,通过控制参数优化加快系统响应速度;在引入通信情况下,提出IM的附加控制方法,实现并联系统暂态有功性能的改善,并将该控制推广到含多台异构微源的混合型孤岛微电网。最后,基于Matlab/Simulink时域仿真验证了该文分析结论与控制策略的有效性。
关键词:混合型孤岛微电网 有功负荷分配 控制参数优化 暂态性能改善
微电网能整合多种分布式微源,是消纳可再生能源、解决能源危机与环境问题的重要手段[1-3]。微电网内包含了风、光、柴、储等多类微源(Microsource, MS),根据各类微源接入微电网的方式,主要可将其分为两种类型:一是同步机接口微源(Synchronous Machine Interface Microsource, SM),如天然气机组与柴油发电机组;二是逆变器接口微源(Inverter Interface Microsource, IM),如储能和光伏发电。孤岛型微电网在提高可再生能源接入比例的同时,也要兼顾其稳定性与可靠性。因此,国内外的孤岛微电网示范工程,大多是SM与IM并存的混合型孤岛微电网[4-5]。
在混合型微电网中,IM一般采用下垂控制,与SM共同进行频率调节,最终实现稳态下有功功率的合理分配[6-7]。然而,两类微源在物理结构和动态特性上的巨大差异会导致完全不同的有功负荷投切暂态响应,增加两类微源配合难度。同时,混合型微电网相较于全同步机或全逆变器微电网,控制器参数更难以调节[8-9]。
异构微源之间的暂态响应差异与参数调节问题使得混合型微电网有功负荷投切暂态性能差,主要表现为各微源间初始有功分配不均、系统响应速度慢,以及IM在有功负荷突增暂态初始阶段中存在较大有功输出峰值[10-11]。其中后者可能会导致耐过电流能力较弱的逆变器触发电流限幅保护,降低系统的稳定性[12]。因此,解决混合型微电网在有功负荷突增场景下异构微源的配合问题、合理调整控制参数是保证微电网稳定运行的关键。
针对以上问题,文献[13]发现针对SM与IM并联系统有功负荷投切暂态过程长、响应速度慢的问题,可通过调节同步机调速器PI参数加快并联系统响应速度。然而文献[13]将产生问题的原因归结为同步机响应速度慢,没有考虑两个异构微源在并联系统中的相互作用。文献[14]提出SM与IM有功负荷突增暂态的初始有功分配与两机暂态电抗比相关,SM与IM的频率暂态响应差异是造成并联系统暂态性能差的主要原因。通过改进IM控制策略使其模拟SM的暂态响应能够提升并联系统暂态性能。但改进的IM控制策略过于复杂,同时也牺牲了逆变器响应速度快的优点。文献[15]与文献[16-17]分别采用瞬时下垂控制和虚拟阻抗的方法改善并联系统有功负荷投切下的暂态性能,但以上研究均缺乏混合型微电网暂态有功分配机理的理论支撑。文献[18-21]通过将异构微源等效为理想电压源串联电抗的形式,构建了异构微源并联系统的等效电路模型。从电路叠加定理出发,推导出有功功率在微源间的分配公式。通过虚拟电抗法改变IM对外等效电抗的方式实现SM与IM初始有功分配的调整,从而改善并联系统暂态性能。但论文中对柴油发电机模型进行了简化,使得SM与IM在有功负荷投切下的频率暂态响应差异并不明显。综上所述,已有研究并未深入分析异构微源频率暂态响应差异对混合型孤岛微电网暂态问题的影响,缺乏从异构微源有功分配机理出发,充分考虑微源响应差异的混合型孤岛微电网暂态有功控制策略。
鉴于此,本文针对含异构微源的混合型孤岛微电网暂态有功响应分析与控制问题进行了深入研究,主要工作如下。
1)暂态有功响应分析方面,参照Certs混合型微电网,充分考虑SM各部分动态,深入分析了IM与SM有功负荷突增暂态频率响应差异,结合对外等效电抗差异分析了系统有功负荷突增暂态初始阶段IM输出有功峰值过高的原因;构建了并联系统传递函数模型,通过系统主导极点分布量化分析了系统的响应速度。
2)暂态有功控制方面,在不引入通信的情况下,通过虚拟电抗法调节异构微源间初始有功分配,通过PI参数优化改变系统主导极点分布进而加快响应速度;在引入通信的情况下,提出IM附加控制方法,利用动态有功转移抑制并联系统有功负荷突增暂态初始阶段的IM有功输出峰值,加快系统响应速度,并将该方法推广到含多台SM和IM的混合型孤岛微电网。
IM依照控制方式的不同,可以分为跟网型和构网型。本文所研究的对象是构网型IM与SM并联的系统,以此出发研究有功负荷突增场景下并联系统暂态响应特性。
文献[10]的Certs微电网中SM的控制框图如图1所示。SM主要由调速器-原动机、自动调压器(Automatic Voltage Regulator, AVR)和同步发电机(SG)三个部分组成。其中AVR通过调整同步发电机励磁的方式,使同步发电机端口电压幅值追踪下垂控制外环给出的电压幅值参考值。调速器-原动机部分以下垂控制外环给出的角频率参考值ωref与同步机转子角频率ωSM的差值作为输入,通过PID控制器和代表原动机动态的延迟环节,最终得到同步发电机机械功率。
图1 SM控制框图
Fig.1 Block diagram of SM
相较于文献[18-20],该模型在同步机调速器-原动机部分建模更加详细,考虑了调速器的PI参数与原动机动态,这将显著影响SM在有功负荷投切场景下角频率ωSM的动态,从而影响混合型微电网有功负荷投切暂态性能。
采用下垂控制的IM控制框图(这里IM可对应为具有功率可调节能力的储能、燃料电池等电源)如图2所示。由下垂控制外环生成角频率与电压幅值参考值,通过电压电流双闭环控制实现对电压幅值参考值的追踪,与积分ωref后得到的相角θ经调制生成开关管的驱动信号[9]。
两类微源通过下垂控制外环实现在微电网中无通信状态下稳态有功功率的合理分配。通常设置下垂控制参数使微源间稳态有功分配比例与微源容量比例一致。
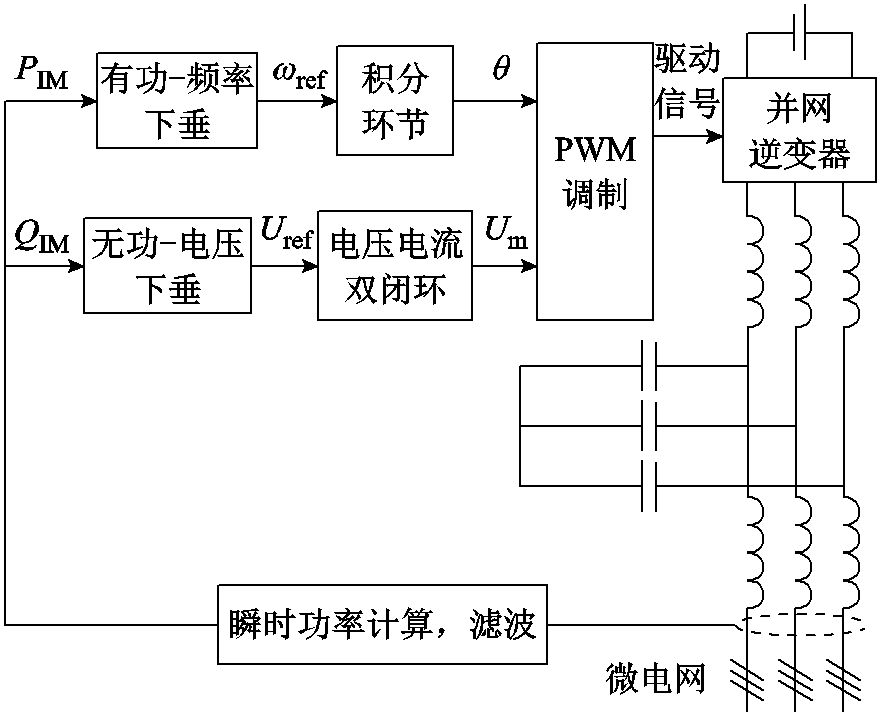
图2 IM控制框图
Fig.2 Block diagram of IM
异构微源并联系统如图3所示。如图3中,PL为恒阻抗有功负荷,下垂控制系数设置为稳态下两机均分PL,其他参数见表1。
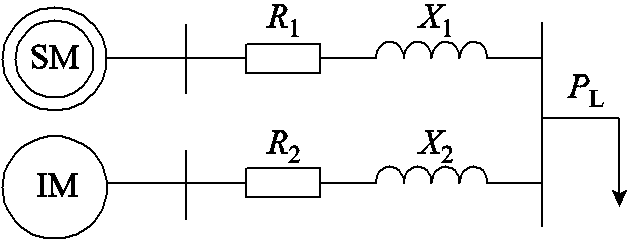
图3 异构微源并联系统
Fig.3 Heterogeneous MSs parallel system
表1 并联系统参数
Tab.1 Parameters of parallel system

参数数值参数数值 SSM/(kV·A)300R1, R2/Ω0.017 SIM/(kV·A)300X1, X2/Ω0.094 Un/V380IM滤波电抗XfilIM/Ω0.13 fn/Hz50q轴同步电抗Xq/Ω1.15
设置有功负荷突增场景,初始阶段PL=80 kW,进入稳态后两机各输出40 kW。10 s时,投入100 kW有功负荷,PL从80 kW突增到180 kW。两机的有功负荷暂态响应如图4所示。
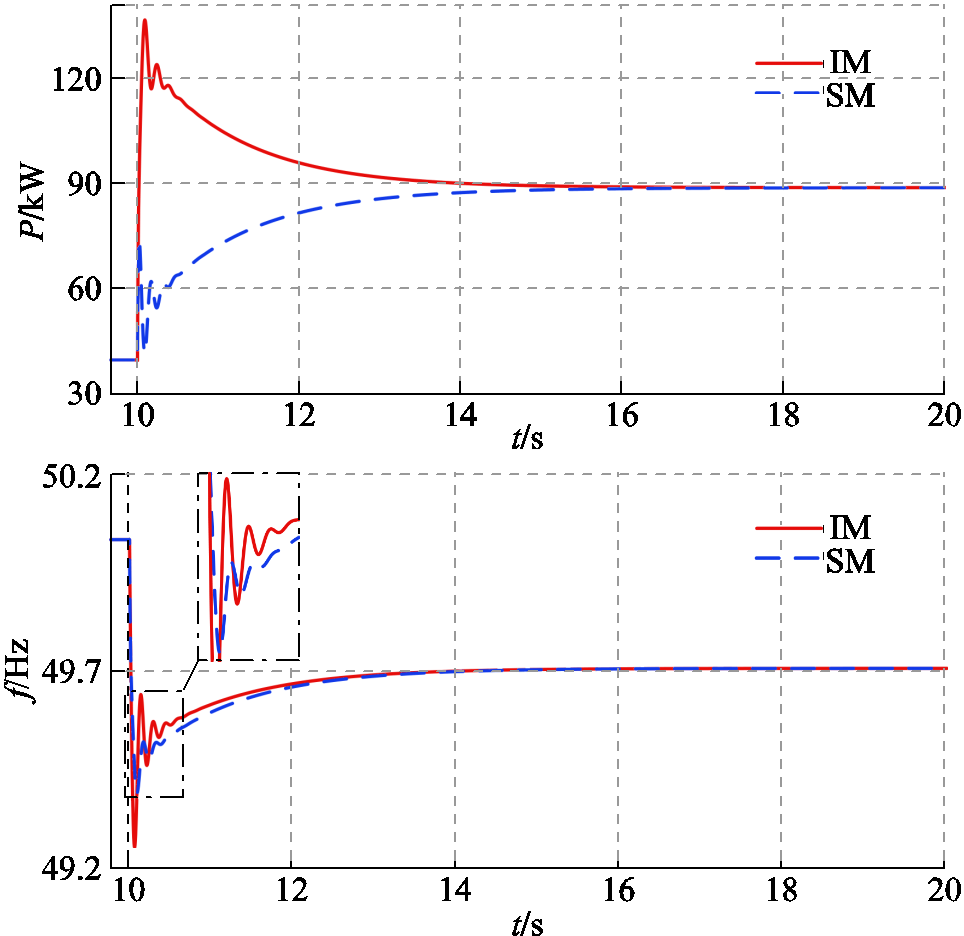
图4 并联系统有功负荷突增暂态响应
Fig.4 Transient response of active load sudden increase in parallel system
图4中并联系统IM与SM有功输出、频率的有功负荷突增暂态响应主要存在两个问题:①暂态初始阶段有功分配严重不均,IM输出有功峰值过高;②系统响应速度慢,进入稳态时间长。
针对图4响应中存在的问题,忽略有功负荷突增时两机机端电压幅值的微小变化,文献[20]给出的异构微源并联系统SM与IM输出有功功率公式为
 (1)
(1)
 (2)
(2)
式中,U为电压幅值;θ为相角;xSM为SM对外等效电抗,即同步机q轴电抗;xIM为IM对外等效电抗,即逆变器滤波电抗;xLI与xLS分别为IM与SM与有功负荷间的线路电抗;PL为两机共同承担的有功负荷。
微源输出的有功功率依公式可以分为两个部分:由电抗比决定的B项和由两机相角动态决定的A项。称B项为初始有功分配,A项为动态有功转移。
依式(1)、式(2),动态有功转移主要由IM与SM的相角动态决定,与两机角频率相关。因此,有必要分析两类微源在有功负荷突增暂态下角频率响应的差异。
在单机带载场景下,暂态过程中下垂控制输出的角频率参考值ωref是一个定值,因此,IM与SM的角频率响应差异主要在于两类微源对于角频率参考值ωref的追踪过程。
IM在有功负荷突增后,参考值ωref直接作为调制信号的角频率。因此ωIM对于ωref的追踪速度很快且没有超调。而SM在有功负荷突增后首先进入惯性响应阶段,由转子释放动能保证功率平衡,ωSM下降。调速器随后开始动作,增加机械功率输出,最终通过PID控制使转子角频率ωSM追踪下垂控制外环给出的参考值ωref,进入稳态。与IM相比,SM在有功负荷突增下的角频率动态响应速度慢且存在较大超调。
当SM与IM并联运行时,两机将产生动态有功转移,此时两机的ωref不再是定值,而是随微源输出有功功率而变化。
IM在并联系统中依然保持ωIM对ωref快速追踪、无超调的特性。因此即使在有功负荷突增暂态过程中,IM的有功输出PIM与ωIM之间也基本维持下垂控制所指定的线性关系。当ωref稳定时,IM将很快进入稳态。而SM中ωSM对ωref的追踪本身存在速度慢、超调大的问题,并联系统中ωref又因两机有功动态转移而变化,使得ωSM呈现出更复杂的暂态响应。
1.2节中并联系统有功负荷突增暂态SM的有功-角频率动态如图5所示。点A为初始稳态点,经有功负荷突增暂态后进入稳态点B。点A和点B连线即为下垂控制所指定的有功-角频率线性关系。相较于单机场景,并联系统中的ωSM动态体现出更多振荡和更长的调节时间,整个暂态过程中PSM与ωSM基本脱离下垂线性关系。
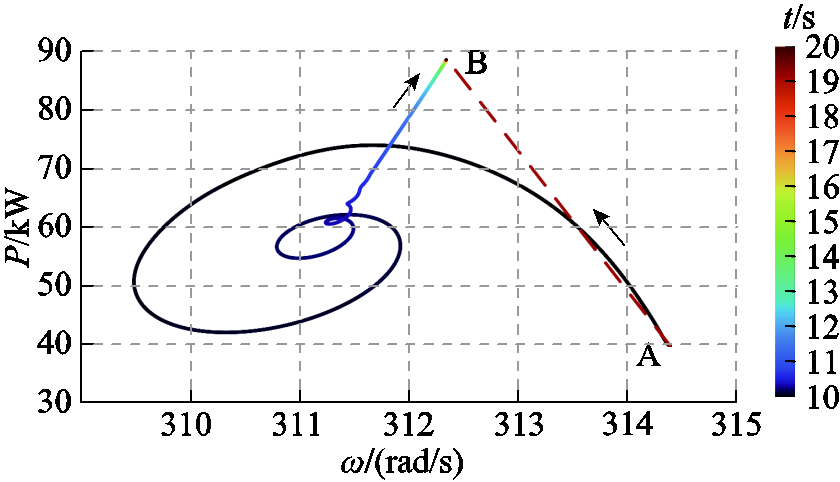
图5 暂态SM有功功率-角频率动态
Fig.5 Transient SM P-ω dynamic
综上所述,IM在无论是在单机带载还是并联系统有功负荷突增场景下,ωIM对于下垂控制外环给出的ωref都保持了快速追踪、无超调的特性;而SM中ωSM对于ωref的追踪速度慢、有超调。两异构微源有功负荷突增暂态的角频率响应差异将不可避免地造成动态有功功率转移,进而引发联锁反应,对并联系统暂态响应有极大影响。
并联系统有功负荷突增暂态初始阶段存在IM输出有功峰值过高的问题。该问题同时受到初始有功分配和动态有功转移的影响。
初始有功分配依式(1)、式(2),由SM与IM的对外等效电抗与线路电抗决定。SM与IM的初始有功分配之比等于xIM+xLI与xSM+xLS之比。一般情况下,xIM xSM,因此IM在并联系统有功负荷突增暂态通过初始有功分配分得大量有功负荷。然而,初始有功分配并非是在负荷突增瞬间完成的,而是受SM的同步机q轴电抗xSM暂态变化的影响,存在一个过渡过程。稳态情况下,xSM的数值等于q轴同步电抗xq。而在负荷突增暂态中,xSM的数值将从突增瞬间的暂态电抗值过渡到稳态下的同步电抗值。SM同步发电机q轴电抗的暂态电抗值小于同步电抗值,但一般仍大于xIM,因此并联系统初始有功分配的整个过程中,IM由初始有功分配分得的有功负荷持续增大。
xSM,因此IM在并联系统有功负荷突增暂态通过初始有功分配分得大量有功负荷。然而,初始有功分配并非是在负荷突增瞬间完成的,而是受SM的同步机q轴电抗xSM暂态变化的影响,存在一个过渡过程。稳态情况下,xSM的数值等于q轴同步电抗xq。而在负荷突增暂态中,xSM的数值将从突增瞬间的暂态电抗值过渡到稳态下的同步电抗值。SM同步发电机q轴电抗的暂态电抗值小于同步电抗值,但一般仍大于xIM,因此并联系统初始有功分配的整个过程中,IM由初始有功分配分得的有功负荷持续增大。
动态有功功率转移主要由2.1节并联系统中IM与SM的角频率动态差异决定。图4中,初始有功功率分配的不同将使IM与SM有功输出产生差异,IM的角频率ωIM与有功功率输出PIM之间基本保持下垂线性关系;而SM的角频率ωSM与PSM之间在暂态过程中基本脱离下垂线性关系,ωSM产生超调,在暂态初始阶段低于稳态值。ωIM与ωSM的响应差异将造成动态有功功率转移,有功从频率更低的微源向频率更高的微源转移,加剧了暂态初始阶段两机的有功功率分配不均,增加了系统暂态有功响应振荡。
以上两点共同作用,使得并联系统有功负荷突增暂态初始阶段IM的有功输出存在一个很大的峰值。
根据2.1节分析结果,并联系统响应速度主要是由SM的角频率ωSM对参考值的追踪速度和两机的动态有功转移速度决定的。但两个过程互相耦合,需将并联系统作为一个整体分析其响应速度。因此,考虑构建以两机共同承担的有功负荷为输入,以两机相位差为输出的传递函数。
并联系统的有功负荷突增行为可以近似看作阶跃输入。由于两机ω动态及电抗参数差异较大,因此SM与IM并联系统在有功负荷突增暂态下将存在动态有功功率转移。当两机相位差达到稳态值时,并联系统进入稳态。因此,通过传递函数模型,可以将并联系统有功负荷突增暂态的响应速度问题转换为系统传递函数对阶跃输入的响应速度问题。
依照图1首先推导SM的传递函数。SM下垂控制外环的方程为
 (3)
(3)
式中,PSM为SM输出有功功率;TfilSM为低通滤波器的惯性环节时间常数;KSM为下垂系数;Pn、ωn为下垂曲线上的一点。原动机-调速器部分的方程为
 (4)
(4)
式中,Kp和Ki为调速器PI参数;Pmec为输出机械功率标幺值;Td为延迟环节时间常数;ωb为角频率基值。考虑到代表原动机动态的延迟环节传递函数不方便后续进行分析,利用Pade近似对其进行处理。
同步发电机的转子运动标幺方程为
 (5)
(5)
式中,Pb为SM有功功率基值;H为同步机惯性常数。
联立式(3)~式(5),可得到SM由 到
到 的有名值传递函数GSM为
的有名值传递函数GSM为
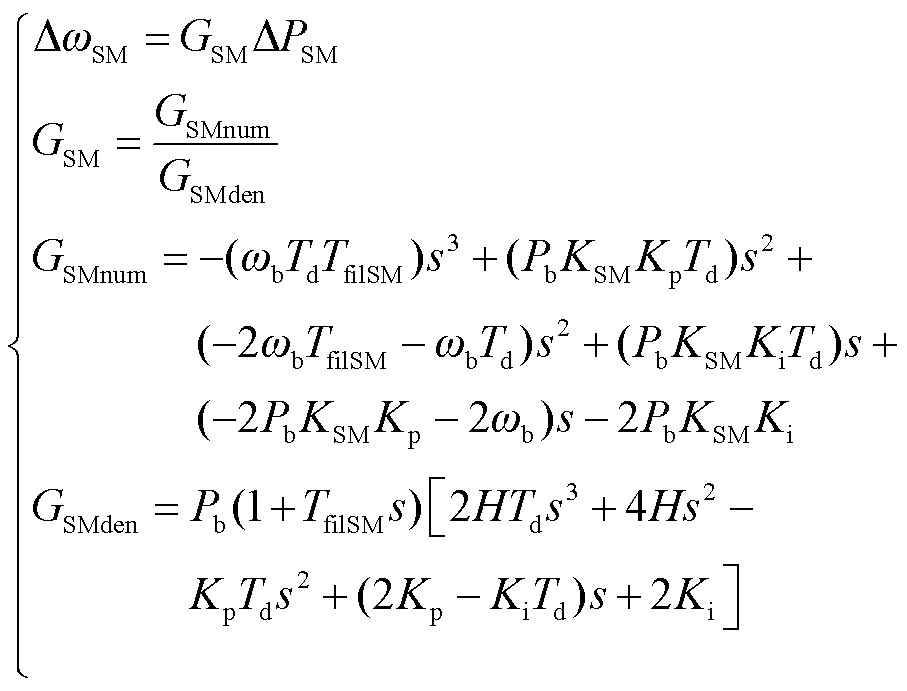 (6)
(6)
依照图2推得IM传递函数GIM为
 (7)
(7)
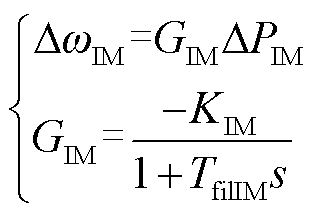
依式(1)、式(2)计算两机的初始有功分配和动态有功转移,忽略有功负荷突增暂态中同步发电机电抗的变化,得到并联系统从有功阶跃输入到相位差输出的传递函数Gparallel为
 (8)
(8)
式中,GI为积分环节;KinSM与KinIM分别为两机初始有功分配系数;Kt为动态有功转移系数。
 (9)
(9)
设定传递函数模型参数与1.2节中并联系统相同,给定有功负荷突增前稳态下ωSM、ωIM、PSM和PIM的初值,10 s时PL从80 kW突增到180 kW。传递函数模型与详细模型的响应对比如图6所示,可见传递函数模型基本能够正确反映并联系统有功负荷突增暂态下SM与IM的有功输出动态。
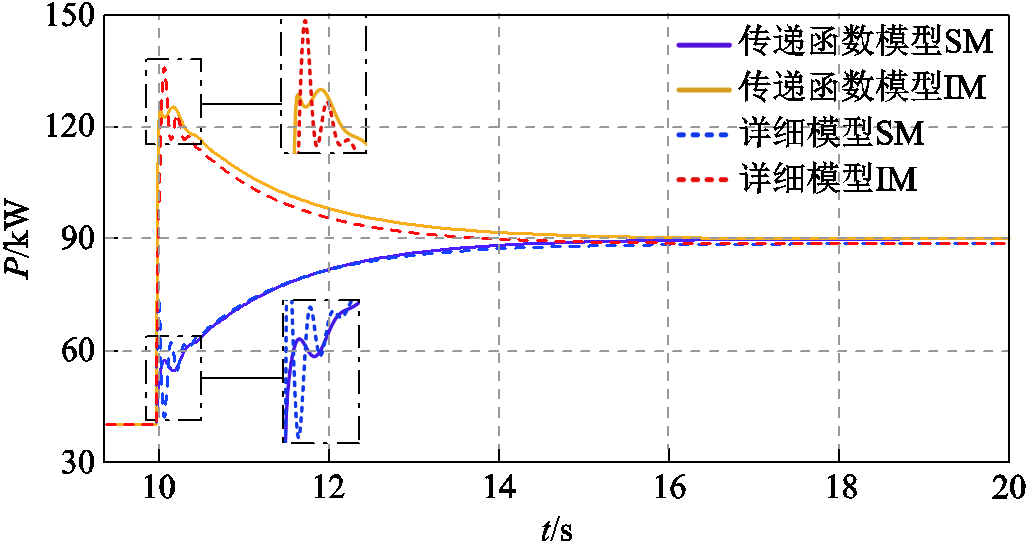
图6 传递函数模型与详细模型的响应对比
Fig.6 Comparison of response between transfer function model and detailed model
通过对并联系统传递函数Gparallel进行极点分析,可知其共存在5个极点,其中2个距离虚轴较远,对系统性能影响不大,故忽略。3个距离虚轴较近的主导极点坐标见表2。可见,并联系统存在一个距离虚轴很近的实轴极点是导致系统有功负荷突增暂态响应速度慢的主要原因。
表2 并联系统极点坐标
Tab.2 Pole coordinates of parallel system

极点名称实轴坐标虚轴坐标 实轴极点-0.7780 共轭极点1-6.02322.155 共轭极点2-6.023-22.155
本节对异构微源并联系统传递函数进行推导,并将传递函数模型与详细模型进行对比,验证了传递函数模型的正确性。通过分析传递函数主导极点的分布可量化评估系统的有功暂态响应速度。
本节将针对并联系统有功负荷突增暂态存在的暂态初始阶段IM有功输出峰值过高、响应速度慢的问题,分别研究不引入通信的虚拟电抗法和参数调节方法,以及引入通信的IM附加控制策略,最终实现异构微源并联系统的暂态有功控制,加快系统响应速度,避免IM暂态初始阶段有功输出峰值过大。
初始有功分配不均是造成IM在暂态初始阶段有功峰值过大的主要原因。初始有功分配与SM和IM的对外等效电抗大小直接相关。因此,考虑引入虚拟电抗法,改变IM对外等效电抗的大小,实现对于并联系统初始有功分配的调节。虚拟电抗法控制框图如图7所示。
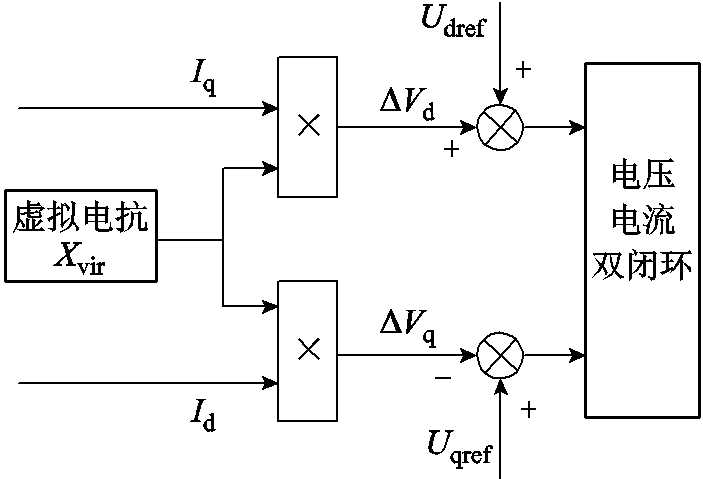
图7 虚拟电抗法控制框图
Fig.7 Block diagram of virtual reactance method
图7中Id和Iq分别为IM并网电流的d、q轴分量,虚拟电抗数值为Xvir。虚拟电抗法通过调整IM下垂控制电压电流双闭环输入参考电压的大小实现对IM并网侧电抗的等效。
虚拟电抗可以选取固定的数值,但是考虑到SM对外等效电抗在并联系统有功负荷突增暂态中的变化会影响两机的初始有功分配,因此,也可以使用可变的虚拟电抗以优化并联系统初始有功分配的调节。
第2节计算的并联系统传递函数主导极点能够量化评估系统的响应速度和振荡程度,可以以其为依据,通过调整参数的方式改变极点分布,达到加快系统响应速度的目的。并联系统内的可调参数可以为同步机的调速器PI参数Kp与Ki。
首先研究SM调速器PID控制器比例增益Kp对于系统的影响。当比例增益从0~20变化时,系统的极点变化轨迹如图8所示。
Kp的变化对于实轴极点的影响较小,Kp增大会使实轴极点向虚轴靠近,减慢系统响应速度。Kp对共轭极点的分布影响较大。当Kp过大时,极点将穿过虚轴进入右半平面,系统将失稳。因此,Kp的调节对于加快系统响应速度作用不大,且在调节过程中应保持在一定范围之内,否则系统将失稳。当调节Kp使得共轭极点在A1与A2位置时,共轭极点距离虚轴最远,系统振荡最小,但会增大系统振荡频率。
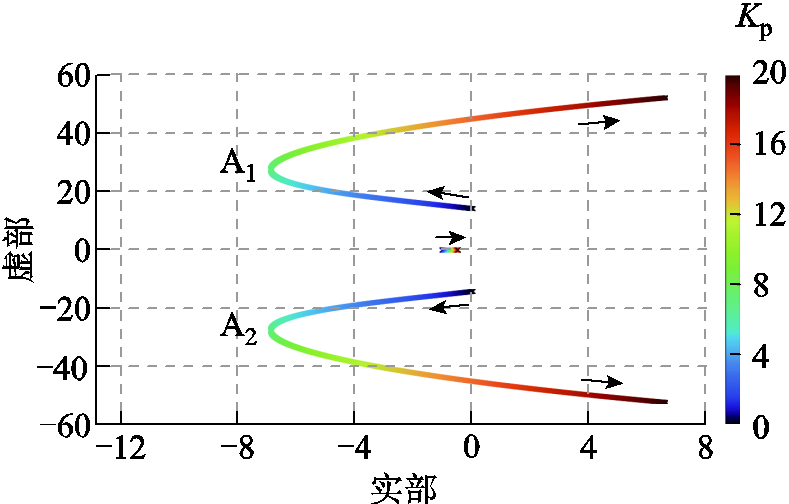
图8 系统极点随比例增益变化轨迹
Fig.8 Pole trajectory of system with proportional gain variation
当积分增益Ki从0~100变化时,系统的极点变化轨迹如图9所示。
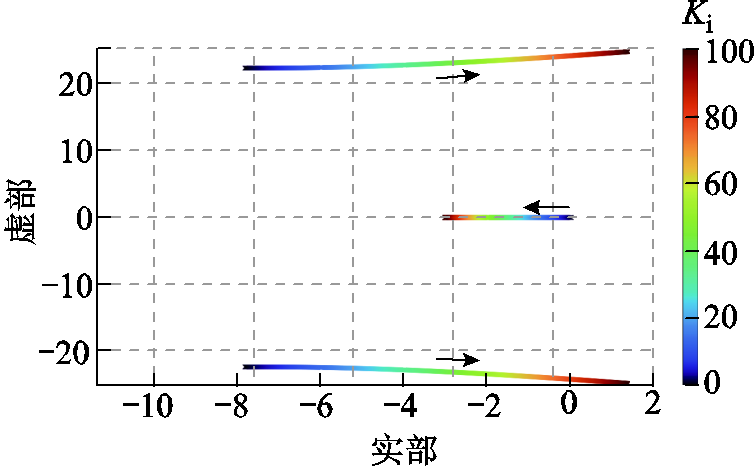
图9 系统极点随积分增益变化轨迹
Fig.9 Pole trajectory of system with integral gain variation
相对于Kp,Ki的变化对于实轴极点的影响更加显著。随着Ki的增大,实轴极点将远离虚轴,并联系统响应速度加快。但Ki的增大同时也会使共轭极点靠近虚轴,增大系统振荡。当Ki过大时,共轭极点进入右半平面,系统失稳。
综上所述,比例增益Kp与积分增益Ki的调节都将对并联系统的主导极点产生影响。Kp增大会使并联系统响应速度变慢,通过合理调节可以减小系统振荡,改变系统振荡频率。增大Ki可以加快系统响应速度,但同时也会加剧系统振荡。Kp与Ki均存在一个调节范围,过大的Kp、Ki将使系统失稳。因此,在调节参数时,需要根据极点轨迹分析,综合考虑响应速度、振荡大小、振荡频率及系统稳定性。
SM与IM并联系统在共同承担的有功负荷突增后,无论是由于初始有功分配不均还是动态有功转移,都将造成暂态初始阶段IM出现较大输出有功峰值。考虑充分利用IM响应速度快、控制灵活的特点,本文通过暂态过程中对ωIM的附加控制调整动态有功转移,改善系统暂态性能。
当下垂控制设置为各机组在稳态下以容量为比例分配有功负荷时,各机组输出有功标幺值在稳态下相同。并联系统中,将SM与IM有功输出标幺值之差P*IM-P*SM作为输入量,设计如图10所示IM附加控制,其中K为输入信号增益。
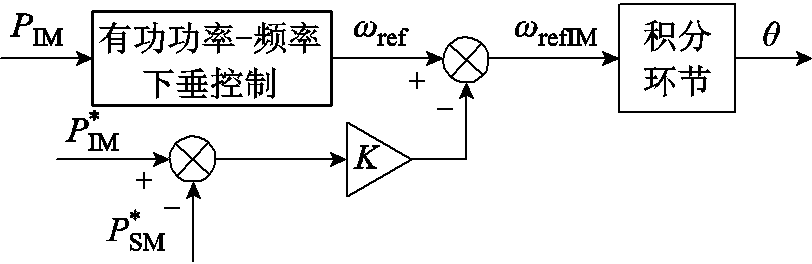
图10 IM附加控制策略
Fig.10 IM additonal control strategy
暂态中,当P*IM-P*SM>0时,IM较稳态下承担过多有功负荷,减小ωrefIM促使有功功率由IM向SM动态转移;当P*IM-P*SM<0时,SM相比稳态下承担过多有功负荷,增大ωrefIM促使有功功率由SM向IM动态转移。当系统进入稳态后,P*IM=P*SM,即P*IM-P*SM=0,IM附加控制自动退出。
引入IM附加控制后,2.3节推导的并联系统传递函数将变为
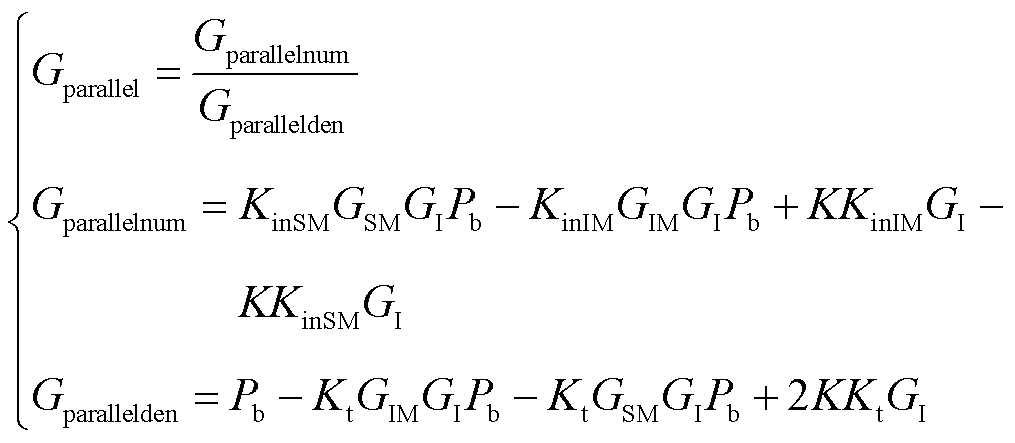 (10
(10
当增益K从0~100变化时,并联系统极点变化轨迹如图11所示。
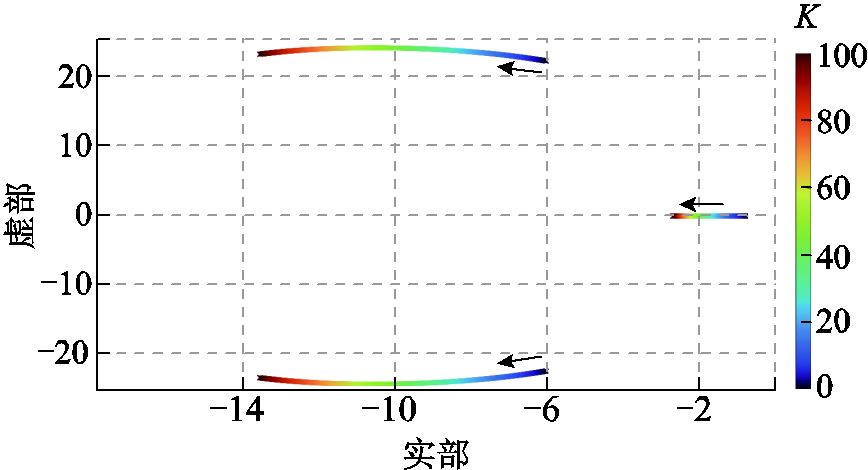
图11 系统极点随增益K变化轨迹
Fig.11 Pole trajectory of system with K variation
可见,随着K值的增大,并联系统传递函数的实轴极点远离虚轴,系统响应速度加快。同时共轭极点随着K值增加远离虚轴,系统振荡减小。因此,K值的设置应在保证并联系统有功负荷突增暂态稳定的情况下尽可能大。
本节将利用Matlab/Simulink仿真软件对本文所提方法进行验证。
本节在1.2节并联系统基础上引入虚拟电抗法,调整IM对外等效电抗。在1.2节并联系统中,IM与SM同有功负荷连接的线路电抗相等,SM同步发电机q轴同步电抗Xq=1.15 Ω,IM滤波电抗XfilIM=0.13 Ω。通过引入IM虚拟电抗Xvir能够改变IM对外等效电抗,当Xvir=1.02 Ω时,SM与IM稳态下对外等效电抗一致。
调整Xvir=1.02 Ω,其他并联系统参数、有功负荷突增场景设置均与1.2节一致。并联系统在该场景下,有功负荷与频率的暂态响应如图12所示。
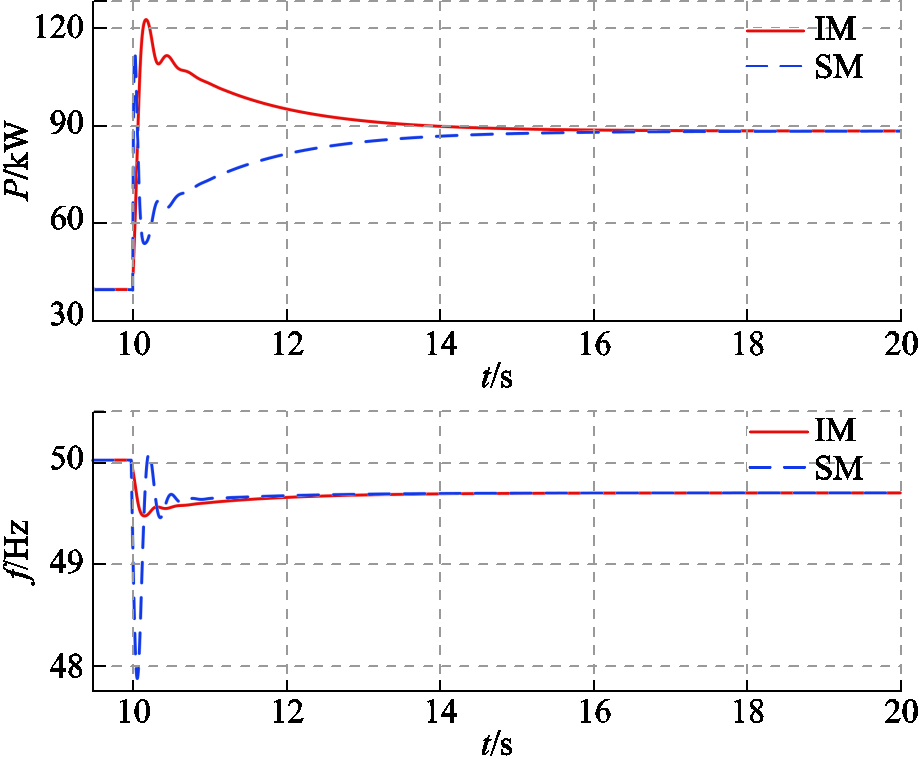
图12 Xvir=1.02 Ω时并联系统有功负荷突增暂态响应
Fig.12 Transient response of active load sudden increase in parallel system when Xvir=1.02 Ω
相较于图4响应,暂态初始阶段的IM有功输出峰值有了一定改善,但SM与IM之间的功率分配仍存在问题。SM的对外等效电抗在有功负荷突增瞬间为暂态电抗,小于该场景下IM的对外等效电抗,因此SM会在暂态初始阶段首先分得大量有功。随后SM频率急剧下降,低于IM频率,有功负荷由SM向IM动态转移。同时,SM的对外等效电抗由有功负荷突增瞬间的暂态电抗逐渐过渡为同步电抗,也会使SM输出有功减小,IM输出有功增多。两种因素共同作用,导致IM初始阶段有功输出峰值依然很大。
下面给出可变虚拟电抗情况下的仿真结果。设置稳态下IM虚拟电抗仍为Xvir=1.02 Ω,使得SM与IM稳态下对外等效电抗一致。并联系统有功负荷突增暂态初始阶段给定Xvir数值变化如图13所示,此时并联系统有功负荷突增暂态响应如图14所示。
总体上,可变虚拟电抗下图14的响应要略优于固定虚拟电抗下图12的响应。图14中,SM与IM的有功负荷在暂态后极短时间内保持了同步上升,此时不存在初始有功分配问题,且两机频率在该阶段完全相同,不受动态有功转移的影响。因此,该电抗变化规律在这一时段使得SM与IM对外等效电抗完全一致。负荷突增瞬间,SM的同步机q轴暂态电抗值等于IM的对外等效电抗值,为0.52 Ω。当改变负荷突增数值时,两机输出功率同步上升现象消失。因此,SM同步发电机q轴电抗在有功负荷突增瞬间的数值随着负荷突增量而改变。
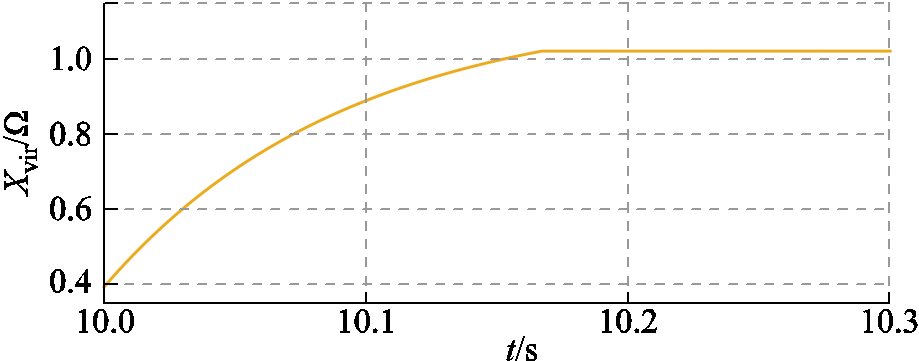
图13 Xvir暂态数值变化
Fig.13 Xvir transient numerical change
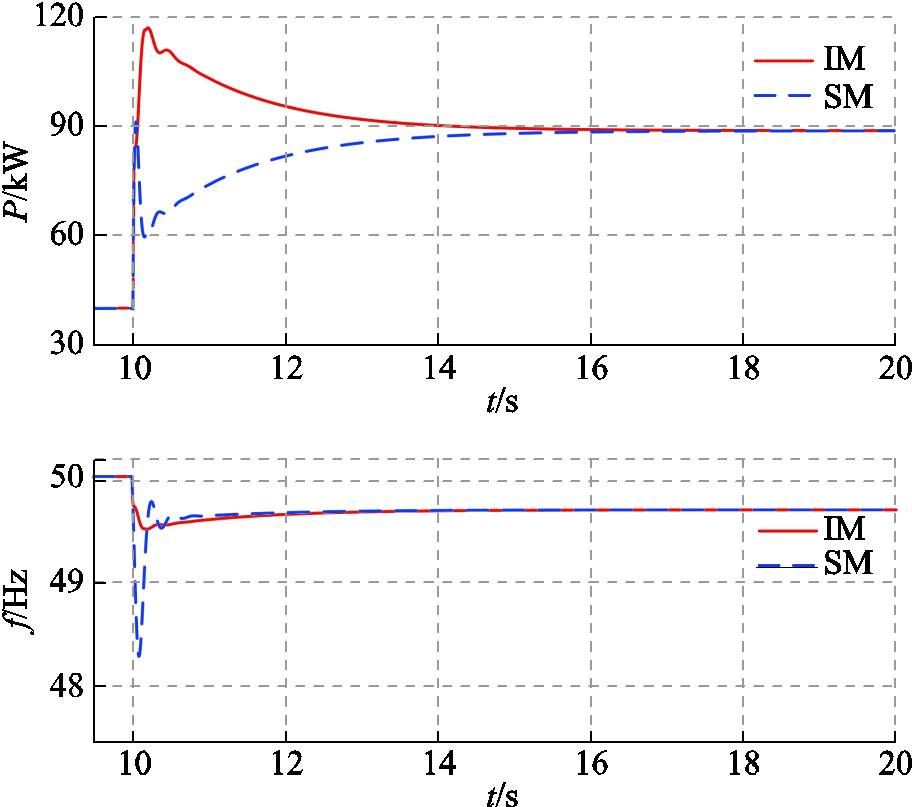
图14 Xvir可变时并联系统有功负荷突增暂态响应
Fig.14 Transient response of active load sudden increase in parallel system with variable Xvir
两机有功同步上升阶段后,IM输出有功持续上升,SM输出有功下降,两机频率出现较大差异。该阶段两机有功输出的改变受到SM同步机q轴电抗变化和动态有功转移两方面因素影响,难以进行定量分析确定理想的Xvir变化规律。
综上所述,无论是固定虚拟电抗还是可变虚拟电抗,对于改善并联系统两机的初始有功分配能够起到一定作用。然而由于暂态下SM同步机q轴电抗变化和两机动态有功转移的影响,仅利用虚拟电抗法难以很好地抑制IM在有功负荷突增暂态初始阶段的有功输出峰值。
本节在1.2节并联系统基础上调整SM调速器PI参数,实现并联系统有功负荷突增暂态响应速度的改善。在1.2节中,并联系统SM调速器PI参数为Kp=5,Ki=15,调整两参数为Kp=4,Ki=60,其他并联系统参数、有功负荷突增场景设置均与1.2节一致。PI参数调整前后,两组PI参数极点分布对比如图15所示。
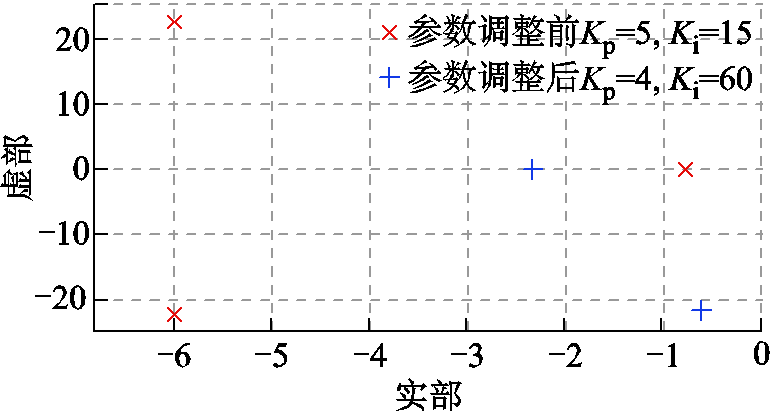
图15 两组PI参数极点分布对比
Fig.15 Comparison of pole distribution of two sets of PI parameters
由图15可知,虽然Kp减小使并联系统共轭极点靠近虚轴,加大系统振荡,但会使系统振荡频率减小,实际并联系统有功负荷突增暂态响应效果更好。参数调整后,并联系统暂态响应如图16所示。
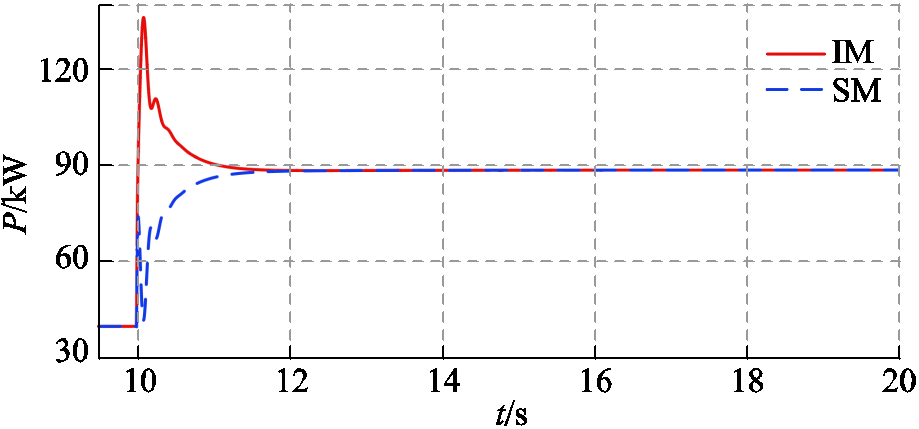
图16 PI参数改变后并联系统有功负荷突增暂态响应
Fig.16 Transient response of active load sudden increase in parallel system after PI parameter changes
对比参数调整前图4的响应可知,PI参数的优化有效地提高了系统的响应速度,但同时也不可避免地增加了振荡。
本节将首先在1.2节并联系统基础上加入IM附加控制,检验其对并联系统有功负荷突增暂态性能的改善。并联系统拓扑如图3所示,选取线路参数为0.17 Ω/km、0.3 mH/km,线路长度均为100 m。并联系统参数见表3。当调整附加控制增益K=70时,系统极点分布与1.2节中不加入附加控制情况下的对比结果如图17所示。
由图17可知,IM附加控制的加入与增益的调整使得系统实轴上极点远离虚轴,系统暂态响应速度加快,同时使共轭极点远离虚轴,减少了系统振荡。
表3 并联系统参数
Tab.3 Parameters of parallel system

参数数值参数数值 SSM, SIM/(kV·A)300Xvir/Ω0.2 Un/V380Xq/Ω1.15 fn/Hz50XfilIM/Ω0.13 Kp5K70 Ki15TfilIM, TfilSM/s0.01
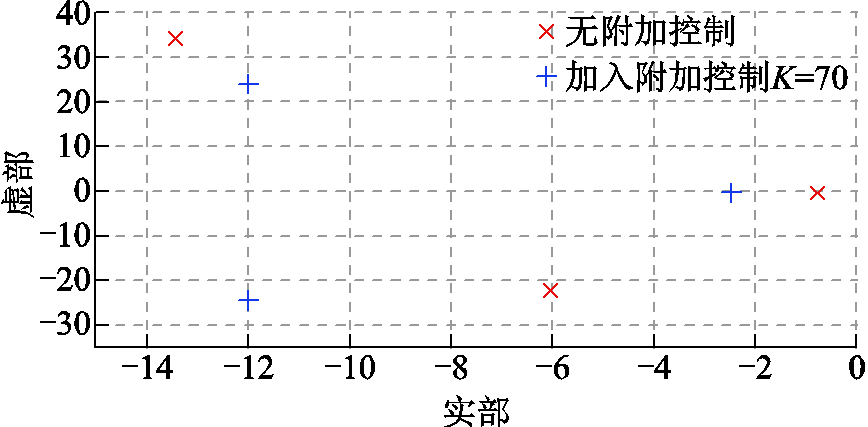
图17 IM附加控制增益K=70时的极点分布与1.2节中不加入附加控制情况下的极点分布对比
Fig.17 Comparison of the pole distribution when IM additional control gain K=70 and the pole distribution without adding additional control in section 1.2
设置有功负荷突增场景为初始阶段PL=80 kW,进入稳态后两机各输出40 kW。10 s时,投入100 kW有功负荷,两机共同承担有功负荷PL从80 kW突增到180 kW。两机的有功负荷暂态响应如图18所示。
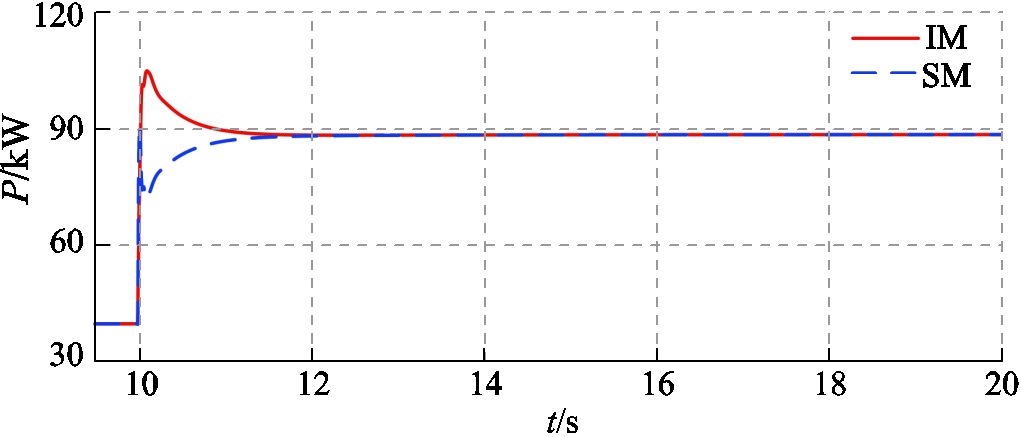
图18 IM附加控制下并联系统有功负荷突增暂态响应
Fig.18 Transient response of active load sudden increase in parallel system with IM additional control
由图18可知,对比图4暂态响应,加入IM附加控制后的并联系统有功负荷突增暂态性能得到极大改善,初始有功分配不均程度减小,IM初始阶段输出有功峰值显著降低,系统响应速度加快。
当系统中含有光伏或PQ控制的储能时,引入IM附加控制与无IM附加控制下的控制效果对比见附录。
当混合型孤岛微电网中存在多台SM与IM时,IM附加控制策略可以通过简单改进推广到多机系统中。在混合型微电网各微源间线路电抗值相差不大的情况下,IM的附加控制策略只需将多台SM有功输出标幺值经加和、平均引入反馈即可。
构建如图19所示含多台SM的混合型孤岛微电网,SSM1=SIM1=300 kV·A,SSM2=SIM2=200 kV·A。各微源下垂控制外环设置为稳态下依容量比分配有功。
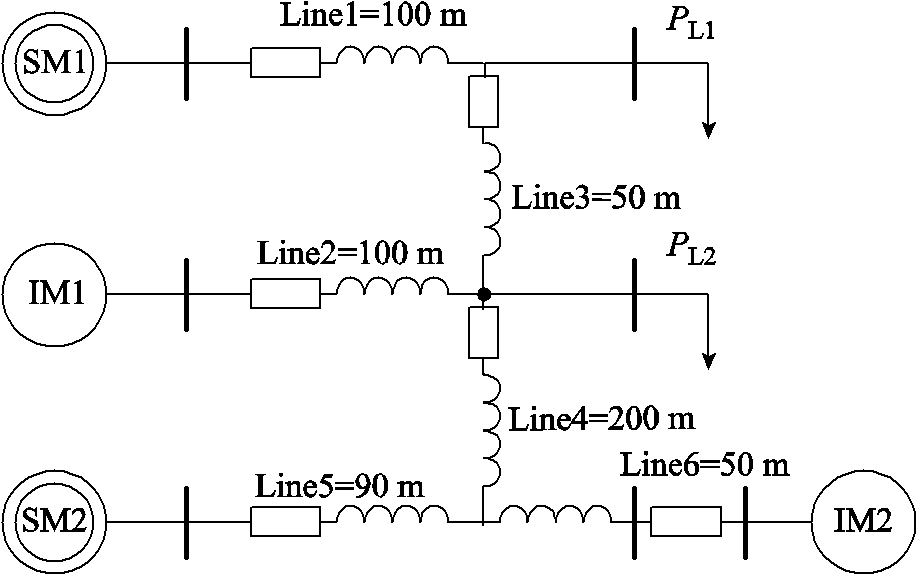
图19 含多台SM和IM的混合型微电网
Fig.19 Hybrid microgrid with multiple SMs and IMs
有功负荷突增场景设置为PL1保持300 kW不变,PL2在10 s时由100 kW突增到300 kW。混合型微电网有功负荷突增暂态响应如图20所示。可见,引入通信的暂态有功控制策略在含多台SM的系统中依然有效。
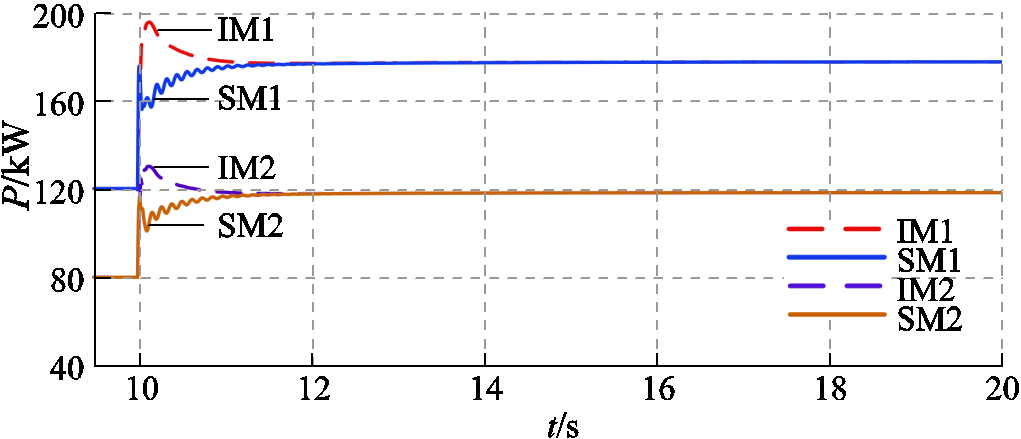
图20 混合型微电网有功负荷突增暂态响应
Fig.20 Transient response of active load sudden increase in hybrid microgrid
三种暂态有功控制方法的对比见表4。虚拟电抗法能通过改变IM对外等效电抗的方式调节初始有功分配,且虚拟电抗值设置灵活。但异构微源间的动态有功转移使得该方法对有功负荷突增暂态初始阶段IM有功输出峰值的抑制作用并不明显。参数调整法能够显著加快系统暂态响应速度,但不可避免地会增大系统振荡。以上两种方法共同的优点在于仅利用IM本地信息,无需进行通信。IM附加控制需要引入微源间通信,将微电网中各台SM的有功输出作为IM的控制输入,会增加通信成本,但控制效果好,能够同时解决响应速度问题与IM暂态初始阶段峰值过高问题。在实际工程中,可根据实际情况与性能要求对不同的控制方法进行取舍,在条件满足的情况下,也可以选择综合使用这三种控制策略。
表4 混合型孤岛微电网暂态有功控制策略对比
Tab.4 Comparison of transient active power control strategies for hybrid island microgrid
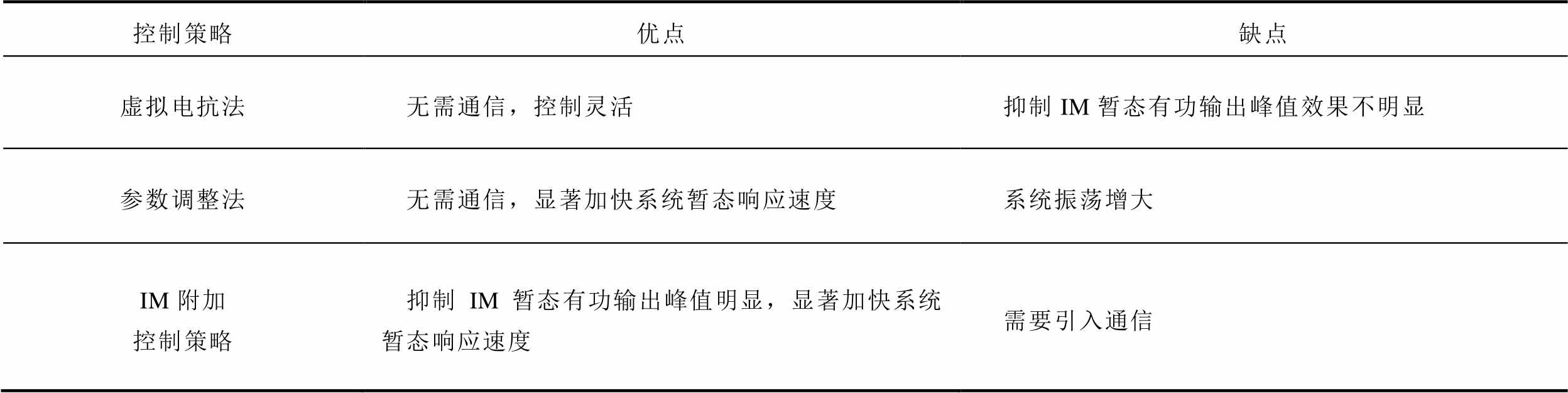
控制策略优点缺点 虚拟电抗法无需通信,控制灵活抑制IM暂态有功输出峰值效果不明显 参数调整法无需通信,显著加快系统暂态响应速度系统振荡增大 IM附加控制策略抑制IM暂态有功输出峰值明显,显著加快系统暂态响应速度需要引入通信
本文首先针对异构微源并联系统有功负荷突增暂态响应中所存在的问题进行了深入分析,以IM与SM有功负荷突增暂态频率响应差异机理分析为基础,通过构建异构微源并联系统的传递函数,定量评估系统的有功暂态响应;然后,在系统的暂态有功控制策略方面,根据是否需要通信,选择利用本地信息的SM参数调节法和虚拟电抗法以及引入通信的IM附加控制策略;最后,通过时域仿真验证了上述方法可有效改善混合型微电网有功负荷突增下的暂态性能。
混合型微电网在有功负荷突增初始阶段,异构微源的有功输出受到SM同步发电机电抗变化和异构微源角频率动态差异两个因素影响,两因素之间又在暂态过程中互相影响,加大了继续深入分析该问题的难度。因此,亟待研究同步发电机在负荷投切暂态对外等效电抗的变化规律。同时,如何仅利用IM的本地控制量实现混合型微电网暂态性能的改善还需进一步探索。
附 录
1. 含光伏发电的异构微源微电网
含异构微源的混合型孤岛微电网中除了SM与下垂控制的IM外,还可包含如光伏等间歇性电源。光伏通过锁相环获取电网频率与相角,使用最大功率点跟踪控制输出最大功率,光伏出力的改变会影响微电网的有功平衡。因此,本文在图3异构微源并联系统的基础上,加入光伏发电(Photovoltaic, PV),构建如附图1所示含PV的异构微源微电网。
PV最大输出有功功率为60 kW。设置光照强度分别在t=20 s与30 s时减小,相应地PV输出有功功率也随之下降,以模拟光伏出力的不确定性与随机性。在不加入IM附加控制的情况下,含PV的异构微源微电网中各微源的有功输出暂态响应如附图2所示。
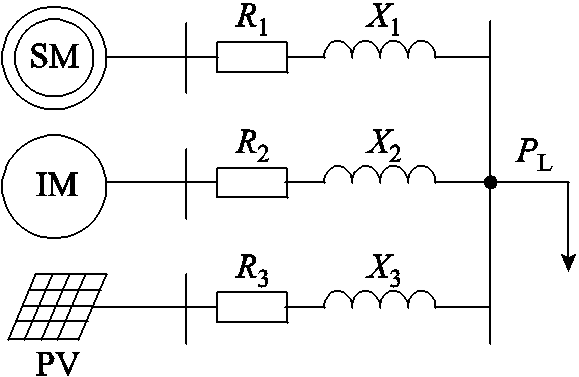
附图1 含PV的异构微源微电网拓扑
App.Fig.1 Heterogeneous MSs microgrid topology with PV
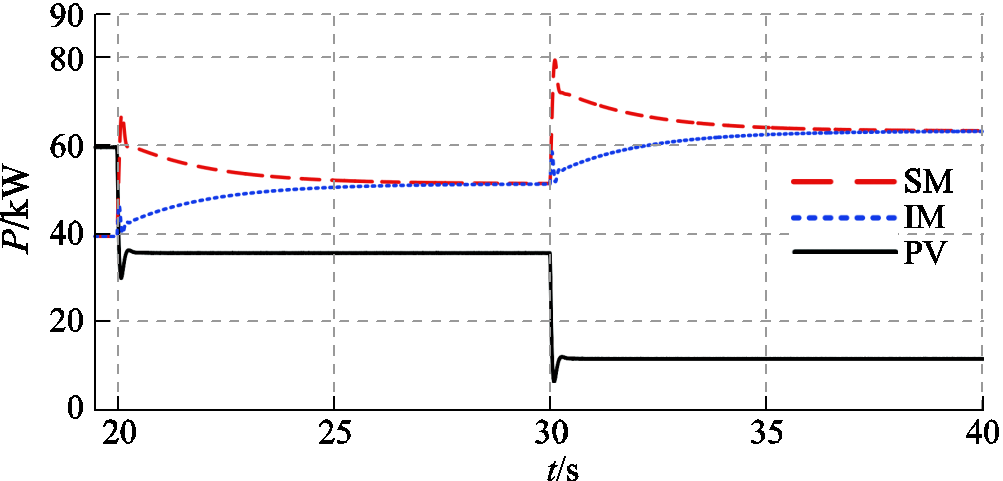
附图2 含PV的异构微源微电网各微源有功输出暂态响应(无IM附加控制)
App.Fig.2 Transient response of active output of each MS in heterogeneous MSs microgrid containing PV (without IM additional control)
作为对比,附图3给出了加入IM附加控制后,含PV的异构微源微电网中各微源的有功输出暂态响应。对比附图2和附图3可知,加入IM附加控制后,SM与IM的有功输出暂态响应得到明显改善,IM输出有功峰值显著减小,系统响应速度更快,从而在考虑光伏出力变化的情况下验证了IM附加控制的有效性。
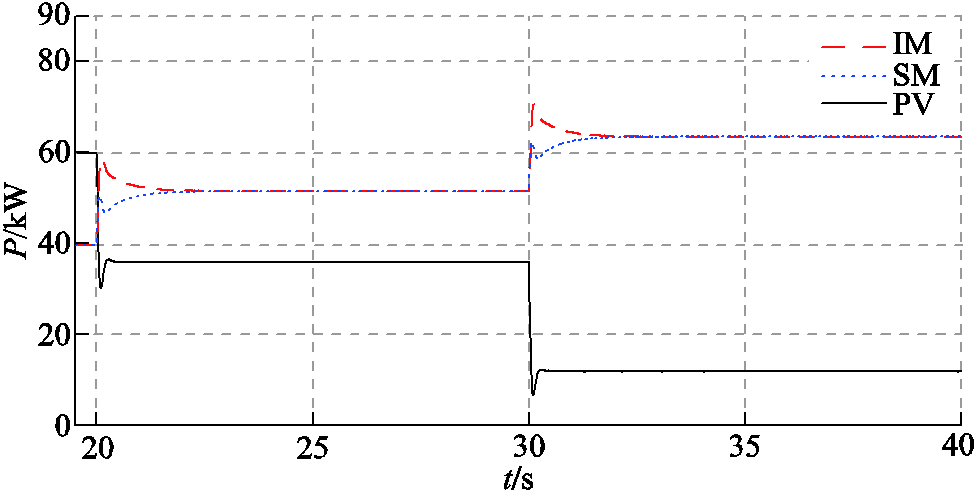
附图3 含PV的异构微源微电网各微源有功输出暂态响应(有IM附加控制)
App.Fig.3 Transient response of active output of each MS in heterogeneous MSs microgrid containing PV (with IM additional control)
2. 含PQ控制储能系统的异构微源微电网
含异构微源的混合型孤岛微电网中除了SM与下垂控制的IM外,也可包含采用PQ控制的储能系统(Energy Storage System, ESS),可根据有功参考值的时序变化使得储能呈现出时序控制特性。本文在图3异构微源并联系统的基础上,加入一个采用PQ控制的储能,构建如附图4所示含PQ控制储能系统的异构微源微电网。
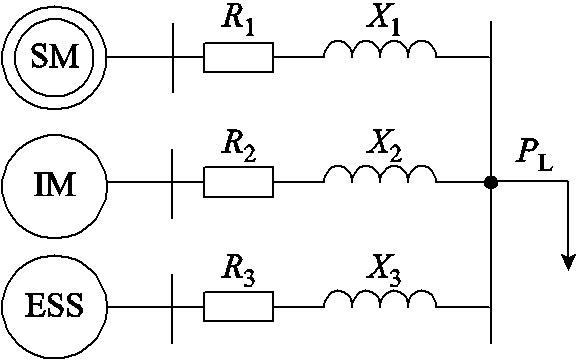
附图4 含PQ控制ESS的异构微源微电网拓扑
App.Fig.4 Heterogeneous MSs microgrid topology with PQ controlled ESS
设置PQ控制储能在t=20 s前输出40 kW有功功率,t=20 s时有功输出参考值由40 kW降至30 kW,t=30 s时参考值继续降至20 kW,t=40 s时参考值降为0,从而模拟储能系统的时序控制特性。在不加入IM附加控制的情况下,含PQ控制储能的异构微源微电网中各微源的有功输出暂态响应如附图5所示。
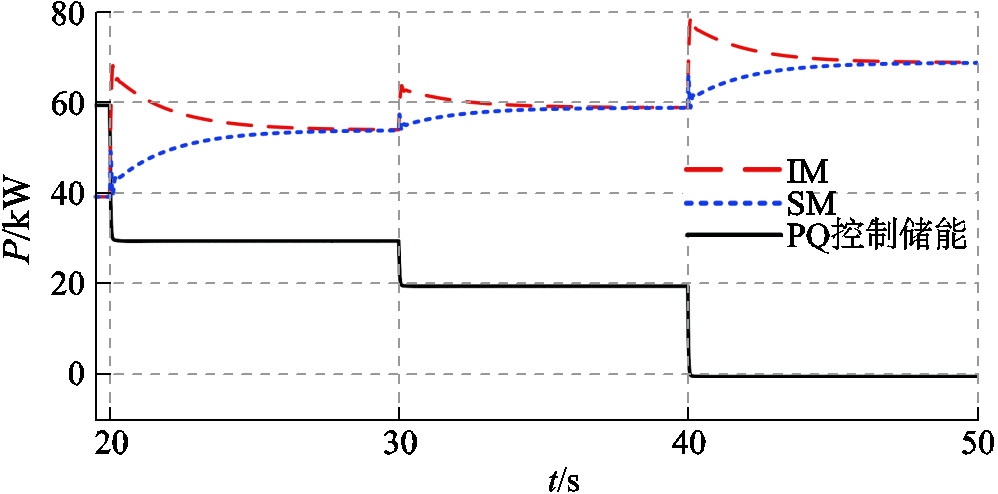
附图5 含PQ控制储能的异构微源微电网各微源有功输出暂态响应(无IM附加控制)
App.Fig.5 Transient response of active power output of each MS in heterogeneous MSs microgrid containing PQ controlled energy storage (without IM additional control)
作为对比,附图6给出了加入IM附加控制后,含PQ控制储能的异构微源微电网中各微源的有功输出暂态响应。对比附图5和附图6可知,加入IM附加控制后,SM与IM的有功输出暂态响应得到明显改善,IM输出有功峰值显著减小,系统响应速度更快,从而在考虑储能系统时序控制特性的情况下验证了IM附加控制的有效性。
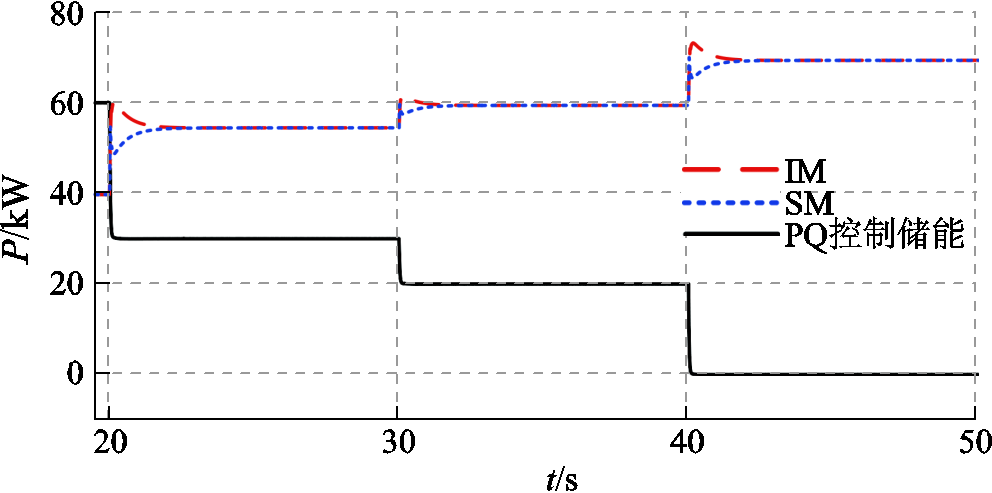
附图6 含PQ控制储能的异构微源微电网各微源有功输出暂态响应(有IM附加控制)
App.Fig.6 Transient response of active power output of each MS in heterogeneous MSs microgrid containing PQ controlled energy storage (with IM additional control)
参考文献
[1] 张靖, 张志文, 胡斯佳, 等. 独立微电网风储协同调频的功率柔性分配策略[J]. 电工技术学报, 2022, 37(15): 3767-3780.
Zhang Jing, Zhang Zhiwen, Hu Sijia, et al. A flexible power distribution strategy with wind turbine generator and energy storage for frequency regulation in isolated microgrid[J]. Transactions of China Electrotechnical Society, 2022, 37(15): 3767-3780.
[2] 吴忠强, 程洪强. 考虑状态受限的微电网二次电压与频率固定时间控制[J]. 电工技术学报, 2023, 38(15): 4107-4119.
Wu Zhongqiang, Cheng Hongqiang. Fixed-time secondary voltage and frequency control for microgrid considering state-constrained[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4107-4119.
[3] 黄文焘, 邰能灵, 刘剑青, 等. 微电网多层级协同反时限保护方案[J]. 电工技术学报, 2021, 36(3): 623-633.
Huang Wentao, Tai Nengling, Liu Jianqing, et al. Multi-layer collaborative inverse-time protection schemes for microgrids[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 623-633.
[4] 盛德刚, 徐运兵, 王晓丹, 等. 孤岛运行模式下的低压微电网控制策略[J]. 电气技术, 2018, 19(1): 34-39.
Sheng Degang, Xu Yunbing, Wang Xiaodan, et al. Control strategy of low voltage micro-grid in island mode[J]. Electrical Engineering, 2018, 19(1): 34-39.
[5] 杨欢, 赵荣祥, 辛焕海, 等. 海岛电网发展现状与研究动态[J]. 电工技术学报, 2013, 28(11): 95-105.
Yang Huan, Zhao Rongxiang, Xin Huanhai, et al. Development and research status of island power systems[J]. Transactions of China Electrotechnical Society, 2013, 28(11): 95-105.
[6] Kundur P, Malik O P. Power system stability and control[M]. 2nd ed. New York: McGraw-Hill Education, 2022.
[7] Lasseter R H. Control and design of microgrid components[R]. New York: Power Systems Engineering Research Center Publication, 2006.
[8] Krishnamurthy S, Jahns T M, Lasseter R H. The operation of diesel gensets in a CERTS microgrid[C]// 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 2008: 1-8.
[9] Erickson M J, Lasseter R H. Integration of battery energy storage element in a CERTS microgrid[C]// 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 2010: 2570-2577.
[10] Renjit A A, Illindala M S, Lasseter R H, et al. Modeling and control of a natural gas generator set in the CERTS microgrid[C]//2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 2013: 1640-1646.
[11] Renjit A A, Illindala M S, Klapp D A. Modeling and analysis of the CERTS microgrid with natural gas powered distributed energy resources[C]//2015 IEEE/IAS 51st Industrial & Commercial Power Systems Technical Conference (I&CPS), Calgary, AB, Canada, 2015: 1-8.
[12] 付熙坤, 黄萌, 凌扬坚, 等. 功率耦合和电流限幅影响下构网型变流器的暂态同步稳定分析[J]. 中国电机工程学报, 2024, 44(7): 2815-2825.
Fu Xikun, Huang Meng, Ling Yangjian, et al. Transient synchronization stability analysis of grid-forming converter influenced by power-coupling and current-limiting[J]. Proceedings of the CSEE, 2024, 44(7): 2815-2825.
[13] Paquette A D, Reno M J, Harley R G, et al. Transient load sharing between inverters and synchronous generators in islanded microgrids[C]//2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 2012: 2735-2742.
[14] Paquette A D, Reno M J, Harley R G, et al. Sharing transient loads: causes of unequal transient load sharing in islanded microgrid operation[J]. IEEE Industry Applications Magazine, 2014, 20(2): 23-34.
[15] 张明锐, 王佳莹, 宋柏慧, 等. 基于等效馈线的孤岛微网并联逆变器间环流抑制策略[J]. 电气技术, 2018, 19(7): 1-8.
Zhang Mingrui, Wang Jiaying, Song Baihui, et al. The circulating current suppressing strategy based on equivalent feeder for parallel inverters in islanded microgrid[J]. Electrical Engineering, 2018, 19(7): 1-8.
[16] 代维, 秦文萍, 任春光, 等. 含同步机微网中基于解耦下垂的自适应虚拟阻抗控制[J]. 中国电机工程学报, 2020, 40(14): 4486-4495, 4728.
Dai Wei, Qin Wenping, Ren Chunguang, et al. Adaptive virtual impedance control based on decoupling droop in microgrid with synchronous generators[J]. Proceedings of the CSEE, 2020, 40(14): 4486-4495, 4728.
[17] 李艺丰. 含VSG和柴油发电机的孤岛微电网协调控制策略研究[D]. 长沙: 湖南大学, 2020.
Li Yifeng. Research on the coordinated control strategy of islanded microgrid with VSG and diesel generator[D]. Changsha: Hunan University, 2020.
[18] Peng Yelun, Zhang Xin. Analysis and improvement of transient load sharing between synchronous generator and virtual synchronous generator in islanded microgrid[C]//2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 2021: 1224-1228.
[19] Peng Yelun, Zhang Xin, Zhan Li. Transient load sharing between grid-forming generators in islanded microgrid[C]//2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 2020: 3867-3871.
[20] 彭也伦, 黄文, 帅智康. 含异构微源孤岛微电网的瞬时有功功率分配问题研究[J]. 中国电机工程学报, 2021, 41(15): 5167-5179.
Peng Yelun, Huang Wen, Shuai Zhikang. Research on transient load sharing in islanded microgrids with heterogeneous DGs[J]. Proceedings of the CSEE, 2021, 41(15): 5167-5179.
[21] Peng Yelun, Shuai Zhikang, Huang Wen, et al. Design-oriented analysis and enhancement of transient power sharing between inverter-interfaced generators and synchronous generators[J/OL]. CSEE Journal of Power and Energy Systems, 2022: 1-10. DOI: 10.17775/CSEEJPES.2021.07360.
Transient Active Power Response Analysis and Control Strategy of Hybrid Island Microgrid Containing Heterogeneous Microsources
Abstract At present, most of the island microgrid demonstration projects at home and abroad are hybrid island microgrids in which inverter interface microsource (IM) and synchronous machine interface microsource (SM) coexist. There are large differences in physical structure and dynamic characteristics between SM and IM, which causes the hybrid island microgrid to have problems of uneven distribution of active power and slow response speed in the transient response of active load switching, showing poor transient performance. In the scenario of a sudden increase in active load, the IM’s active power output peak value is too high in the initial transient stage, which can easily trigger the inverter current limiting protection and reduce system stability. Therefore, improving the transient performance of hybrid microgrids under sudden increases in active load is the key to ensuring the stable operation of microgrids.
This paper first takes the IM and SM parallel system as the research object, and divides the active power output of SM and IM during the transient process of sudden increase in active load into initial active power distribution and dynamic active power transfer. Among them, the initial active power distribution is mainly related to the external equivalent reactance ratio of the microsources, the dynamic active power transfer is mainly related to the difference in angular frequency response between SM and IM. Then, the differences in the external equivalent reactance and angular frequency response of the heterogeneous microsources were analyzed respectively, and the reasons for the excessively high peak active power output of the IM in the initial transient stage were obtained. To quantify the response speed of the parallel system, taking the active load sudden increase as the input and the phase angle difference between SM and IM as the output, the transfer function of the heterogeneous microsources parallel system was constructed, and the influence of the dominant poles’ distribution on the response speed was analyzed. Based on the analysis results, a transient active power control strategy for a hybrid island microgrid containing heterogeneous microsources is studied. Without introducing communication, the virtual reactance method is introduced to adjust the initial active power distribution of heterogeneous microsources. At the same time, the dominant pole distribution of the system is changed by adjusting the proportional gain and integral gain of the SM governor to speed up the system response speed. In the case of introducing communication, by introducing the IM additional control strategy, it can suppress IM’s active power output peak value in the initial transient stage and accelerate the system response speed simultaneously, and extend this strategy to the hybrid island microgrid with multiple heterogeneous microsources.
Finally, the effectiveness of the analysis conclusion and control strategy of this paper was verified based on Matlab/Simulink time domain simulation. Four calculation examples were constructed: SM and IM parallel system, hybrid island microgrid containing multiple SMs and IMs, heterogeneous microsources island microgrid containing PV, and heterogeneous microsources island microgrid containing PQ-controlled energy storage system. It is verified that the IM additional control strategy can improve the transient performance of the hybrid microgrid in the scenario of a sudden increase in active load.
keywords:Hybrid island microgird, active power distribution, control parameter optimization, transient performance improvement
中图分类号:TM711
DOI: 10.19595/j.cnki.1000-6753.tces.231449
国家重点研发计划青年科学家资助项目(2022YFB2405500)。
收稿日期 2023-09-01
改稿日期 2023-11-11
赵郅毅 男,1998年生,博士研究生,研究方向为混合型微电网暂态分析。
E-mail:23111447@bjtu.edu.cn
吴翔宇 男,1990年生,副教授,硕士生导师,研究方向为微电网运行控制、可再生能源电力系统振荡分析与抑制、韧性电网。
E-mail:wuxiangyu@bjtu.edu.cn(通信作者)
(编辑 赫 蕾)