图1 岸电变流器接入船舶电力系统的结构
Fig.1 Schematic diagram of the shore-to-ship converter connected to the shipboard power system
摘要 船舶岸电变流器作为靠港船舶新的供电电源,可极大地降低船舶靠港时船用同步发电机重质柴油燃烧所带来的NOx、SOx和柴油颗粒等污染物。为保证船舶供电的连续性,岸电侧与船电侧电源多采用预同步方式完成不断电切换,然而可能会因两侧电压非理想的相位差而诱发电流冲击,进而导致岸电与船电电源切换失败。因此,该文首先提出船舶岸电变流器用构网型电流矢量控制策略,其实施于锁相环确定的船电两相同步旋转坐标系中,可在无预同步的前提下完成岸电变流器无冲击自整步并入船电系统,同时通过幅频电压-矢量电流级联闭环完成对船舶岸电变流器输出电压幅值和频率的有效调控。然后,建立构网型电流矢量控制数学模型,并基于此分析控制带宽对控制系统相位稳定裕度、电压跟踪能力以及对负载电流的抗扰能力。最后,通过Satrsim MT 8020硬件在环测试,验证了所提构网型电流矢量控制策略的有效性。
关键词:岸电变流器 构网型 电流矢量控制 船舶电力系统 无缝切换
现阶段,船舶岸电变流器作为靠港船舶供电的新型电源,可替代船舶辅机电源,为船电系统提供稳定电力供给,同时降低船用同步发电机所产生的NOx、SOx和柴油颗粒等污染物[1-2],对港-船节能减排具有重要意义,因而在国内外港口得到广泛应用。
由于船电系统50 Hz、60 Hz供电频率共存,则船舶岸电变流器多采用AC-DC-AC背靠背变流器形式[3-4]。其中,市电侧变流器以维持直流母线电压稳定为目标,船电侧变流器以输出频率、幅值可控的三相对称交流电为目标,是完成船-岸互联、实现不间断供电的关键单元。
因此,船舶岸电变流器在船用同步发电机切除后需构建交流侧电压、幅值,而多采用下垂控制、虚拟同步机控制等构网型控制策略,实现对交流电压幅值、频率的调节[5-7]。然而,船舶电力系统与岸电变流器以双电源异步方式运行,为避免并列过程中电流冲击,多采用准整步方式完成并列[8-9],即先调制建压、后并联合闸。首先建立岸电变流器输出电压,而后调节其幅值和相位,使岸电侧与船电侧电压满足并联合闸条件,完成岸电变流器并列,并在船用同步发电机切除后独立为船电系统可靠供电。
为完成构网型岸电变流器接入船舶电力系统,文献[10-11]利用锁相环检测电压的幅值和频率,并将二者设置为空载电压的幅值和频率,确保两侧电压幅值和频率相等,而后在相位差过零时刻闭合开关。然而,合闸开关动作时间存在非理想误差,可能导致合闸前后两侧电压相位不同,进而引起电流冲击。因此,文献[12-13]则利用锁相环输出频差、相位差作为补偿频率项引入有功-频率环,可同时调节频率和相位偏差,以保证两侧电压频率和相位的一致性。文献[14]构造并网两侧电压间的虚拟有功功率,通过将两点间虚拟功率控制为零,可实现开关两侧相同电压相位。然而,这些预同步控制策略[12-14]在合闸后存在补偿支路的切除,会导致相位跳变,可能诱发大扰动失稳现象。为避免合闸前后控制结构改变,文献[15]提出基于虚拟电流的预同步控制方式,该控制策略岸基侧电压与船舶电力系统电压偏差在虚拟导纳上形成的虚拟电流为输入,通过对虚拟电流的调节,完成变流器输出电压幅值、相位和频率的调节,在合闸后由于虚拟电流为零而无需进行控制结构切换,但其存在微分项,可能会导致外部扰动放大、同步时间增加等负面效应。
因此,本文提出一种船舶岸电变流器的构网型电流矢量控制策略。该控制策略首先以常规矢量控制为基础,利用锁相环确定电网电压矢量空间以及同步旋转坐标系空间位置角,构造幅频电压闭环,以获取相应的电流受控目标;而后通过电流闭环生成岸电变流器调制电压,可完成先并联合闸、后调制建压的岸电与船电电源无冲击自整步并列。一方面,构网型电流矢量控制利用锁相环用于替代常规有功-频率环,可在零功率输出下确定岸电变流器输出电压相位,避免了常规下垂控制岸电变流器准整步并列中先调制建压、后并联合闸所需的预同步环节;另一方面,该控制策略利用幅频电压外环自主调节岸电变流器电流受控目标,在船电负荷转供与独立供电期间可自主填补功率缺额,维持船电侧电压幅值和频率的无差控制。然后,基于构网型电流矢量控制的传递函数,分析了其运行稳定性、幅频跟踪能力以及负荷扰动抑制能力。最后,通过硬件在环测试验证了所提构网型电流矢量控制策略的有效性。
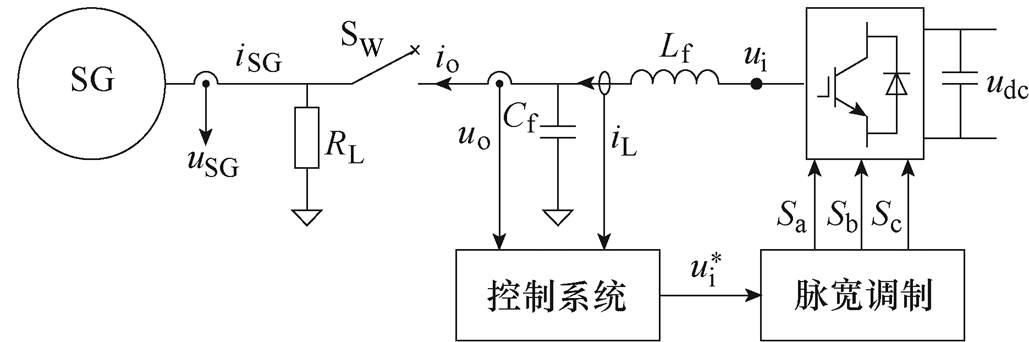
图1给出了船舶岸电变流器接入船舶电力系统的结构。图1中,RL为船电系统等效负荷,SG为船用同步发电机,SW为岸电变流器并网开关,uSG、iSG分别为船用同步发电机输出电压、电流,io、uo分别为岸电变流器并网电流、并网电压,iL、ui分别为岸电变流器输出电流、输出电压,Lf、Cf分别为岸电变流器滤波电感、电容,udc为岸电变流器直流侧电压,下标d、q表示同步旋转坐标系dq轴分量,上标*表示参考值。
图1 岸电变流器接入船舶电力系统的结构
Fig.1 Schematic diagram of the shore-to-ship converter connected to the shipboard power system
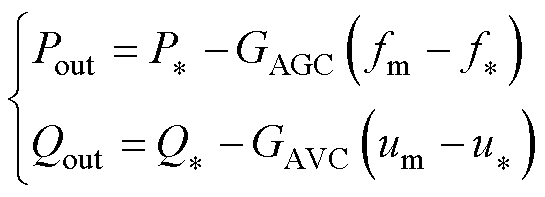
在电流矢量控制中,可根据输出功率与电网电压频率、幅值的关系[16-17],划分为电流支撑(current supporting)型和电流输出(current forming)型两大类。在电流支撑型矢量控制中,输出端有功频率、无功电压特性可分别表示为
 (1)
(1)
式中,Pout、Qout分别为岸电变流器输出有功、无功功率测量值;P*、Q*分别为岸电变流器输出有功、无功功率参考值;fm、um分别为锁相环输出的频率、幅值测量值;f*、u*分别为岸电变流器端电压频率、幅值受控目标;GAGC、GAVC分别为岸电变流器有功频率、无功电压系数。
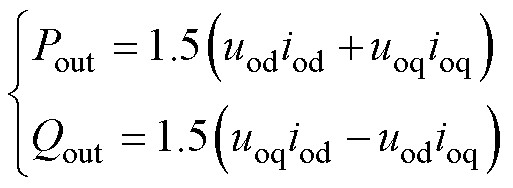
根据图1所示电流正方向,岸电变流器输出有功、无功功率可分别表示为
 (2)
(2)
式中,uod、uoq分别为变流器并网电压uo的d轴电压、q轴电压;iod、ioq分别为变流器并网电流io的d轴电流、q轴电流。
在控制系统中,采用锁相环获取电网电压矢量空间位置,并将其固定在两相旋转坐标系d轴上,实现电网电压d轴定向矢量控制,图2给出了锁相环实施结构。
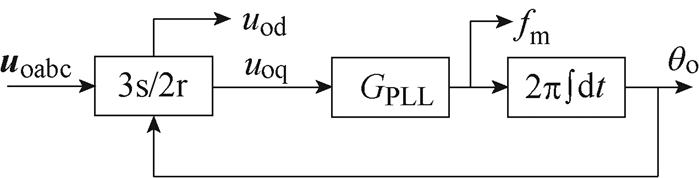
图2 锁相环实施结构
Fig.2 Implementation of phase-locked loop
可见,通过对q轴电压进行比例-积分调节后,即可获取电网电压矢量的旋转角速度,即电网角频率,则有
 (3)
(3)
式中,GPLL为锁相环用比例积分调节器传递函数。
通常,在数字控制中理想积分器常用一阶低通滤波器代替,则GPLL可写为
 (4)
(4)
式中,wc为截止频率;kPLL为锁相环用调节器的比例系数;TPLL为锁相环用调节器的积分时间常数;s为微分因子。
则在d轴电压定向的同步旋转坐标系中,岸电变流器输出有功、无功电流可表示为
 (5)
(5)
对于岸电变流器而言,其输出有功、无功功率由船舶电力系统电力差额决定,而与其参考值无关,则可设置P*=0、Q*=0。同时,考虑到滤波电容相对较小,可近似忽略交叉耦合项的影响,则岸电变流器输出电流可表示为船电系统电压频率、幅值函数,具体表示为
 (6)
(6)
因此,岸电变流器外环可设置为电压幅频闭环,以获取输出电流指令,则有
 (7)
(7)
式中,GF、GV分别为电压频率和幅值调节器。
为实现岸电变流器输出电压频率和幅值对其参考值的无差跟踪,可引入比例-积分调节器作为电压幅频闭环的控制器,且在数字控制中理想积分器常用一阶低通滤波器代替,则GF、GV可分别表示为
 (8)
(8)
式中,kF、kV分别为电压频率和幅值调节器的比例系数;TF、TV分别为电压频率和幅值调节器的积分时间常数。
忽略解耦项时,岸电变流器用三相全桥电压源变流器输出电压可表示为
 (9)
(9)
为提高电流环的相位裕度,通常采用比例调节器作为电流调节器,则有
 (10)
(10)
式中,GC为电流调节器传递函数,具体为
 (11)
(11)
根据图1、式(7)和式(10),图3给出了构网型电流矢量控制结构,其中,3s/2r为三相静止坐标系到两相同步旋转坐标系的坐标变换,2r/3s为两相同步旋转坐标系到三相静止坐标系的坐标变换。可见,本文所提的构网型电流矢量控制包括获取船电侧电压同步信号的锁相环、确定岸电变流器受控电流目标的电压幅频外环、获取PWM波的电流内环三个主要环节,其并入船电系统的具体流程如下:首先,闭合SW开关,令岸电变流器以闭锁状态并入船电系统,并利用锁相环获取电网电压同步信号,完成并联合闸;其次,以锁相环输出的船电侧电压幅值、频率作为幅频电压外环的受控目标,并使能幅频电压-电流级联闭环,此时幅频电压外环受控目标固定为此刻船电侧电压幅值、频率而不再改变;然后,利用正弦脉宽调制(Sine Pulse Width Modulation, SPWM)获取控制岸电变流器三相全桥功率器件的开关信号,完成岸电变流器调制建压与自整步并列;最后,降低船用同步发电机出力,由于幅频电压闭环的存在,可自主调控岸电侧有功、无功电流注入以弥补功率缺额,维持船电侧幅值和频率稳定,直至船用同步发电机输出电流为零,即完成船电负荷转供并可切除同步发电机。
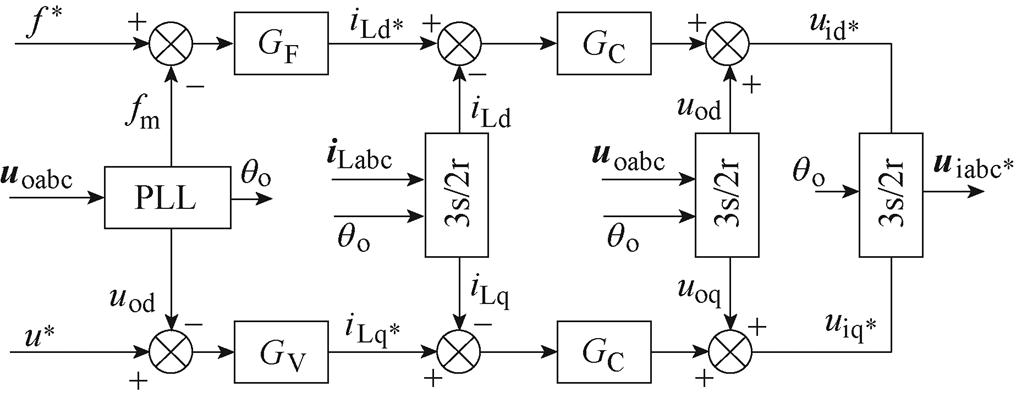
图3 构网型电流矢量控制策略
Fig.3 Grid-forming vector current control strategy
为详细说明采用构网型电流矢量控制的岸电变流器运行过程,图4给出了构网型电流矢量控制岸电变流器并列流程。在岸电变流器并联合闸后、闭环控制使能前,电压幅频外环受控目标u*、f*设置为锁相环输出的幅值um、频率fm,则此时其输出的电流受控目标始终保持为零。在岸电变流器使能瞬间,电压幅频外环受控目标u*、f*固定为此刻锁相环输出的船电侧电压幅值、频率而不再改变。这里需要说明,在闭环控制使能后的岸电变流器过渡过程中,由于锁相环带宽较低,锁相环输出电压幅值、频率仍维持不变,即可认为其所输出的电流受控目标始终为零,则保证了在调制建压过程中岸电变流器无过电流现象出现。在船电负荷转供完成后岸电变流器独立供电期间,岸电变流器幅值、频率受控目标可根据需求确定,并完成对所设定的船电侧幅值、频率的无差控制。
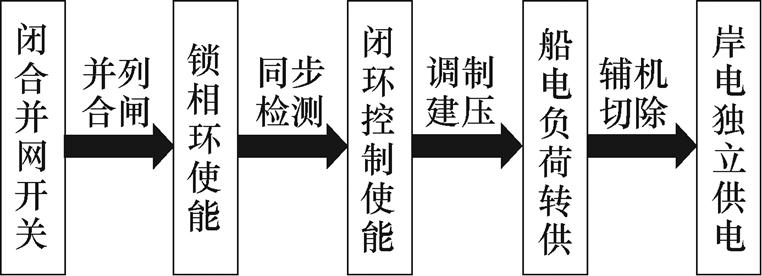
图4 构网型电流矢量控制岸电变流器并列流程
Fig.4 Connection and implementation of the shore-to-ship converter with grid-forming vector current control
综上所述,构网型电流矢量控制利用锁相环用于替代常规有功-频率环,可在零功率输出下确定岸电变流器输出电压相位,避免了常规下垂控制岸电变流器准整步并列中先调制建压、后并联合闸所必需的预同步环节,并利用幅频电压外环自主调节岸电变流器电流受控目标,在船电负荷转供与独立供电期间可自主填补功率缺额,维持船电侧电压幅值和频率的无差控制。
由于本文重点关注构网型电流矢量控制策略的性能,为简化系统分析,近似忽略锁相环动态[18],认为控制dq坐标系与系统dq坐标系一致,则在dq坐标系中,图5给出了构网型电流矢量控制结构。
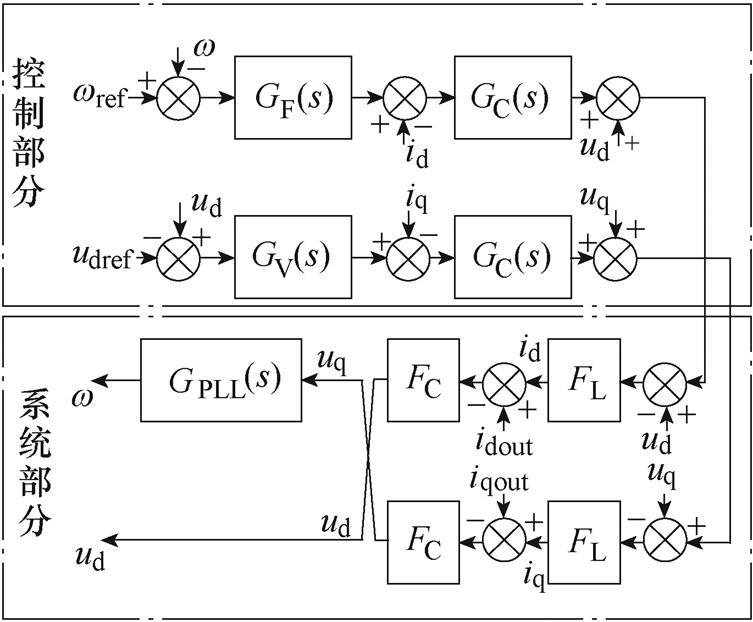
图5 构网型电流矢量控制结构
Fig.5 Diagram of grid-forming vector current control
可见,在构网型电流矢量控制中,频率、幅值为受控量,而岸电变流器dq轴输出电流为扰动量。由于受控量的不对称特性,需采用传递函数矩阵表示输入-输出关系,具体可表示为
 (12)
(12)
其中
通常,LC滤波器电容多在10~50 mF,锁相环带宽多在10~40 Hz,电压环带宽多在10~20 Hz[17, 19],则1+TOL 1。因此,式(12)可简化为
1。因此,式(12)可简化为
 (13)
(13)
式中,Gwu为岸电变流器输出电压频率和幅值对指令的跟踪能力;Hod、Hoq为岸电变流器输出电压频率幅值受船电负载动态的影响,也可表示输出电压频率幅值对外部负载电流扰动的抗扰性。
 (14)
(14)
根据式(14)可见,Gwu、Hod、Hoq传递函数的分母相同,则可将1+TOL定义为船舶岸电变流器用构网型电流矢量控制策略的特征方程。为便于后续分析,可将Gv、GF、GPLL的积分时间常数设置为0.03 s,截止频率wc设置为15 rad/s,锁相环带宽为30 Hz,电压幅频环带宽为10 Hz,电流环带宽为500 Hz,其余控制参数及电路参数详见表1。由于开环传递函数TOL含有三者乘积项,则可引入等效带宽增益系数keq,表示任意环节带宽的变化倍率。
根据表1所示仿真参数,图6给出了等效带宽增益系数动态下构网型电流矢量控制传递函数TOL伯德图。可见,当等效开环增益系数分别为0.04、0.2、1、5、25时,构网型电流矢量控制系统的相位裕度分别为123.6°、93.4°、82.3°、46.5°、25.1°,呈现逐渐下降趋势。也就是说,随着控制带宽的增加,即等效带宽增益系数增大,构网型电流矢量控制系统相位裕度逐渐降低。为保证控制系统具有足够的相位裕度,一般要求不低于25°,这也就对锁相环、幅频环和电流环的控制带宽提出了限制。在表1给出的仿真参数基础上,构网型电流矢量控制等效带宽增益系数不宜超过25。
表1 岸电变流器参数
Tab.1 Tested converter parameters
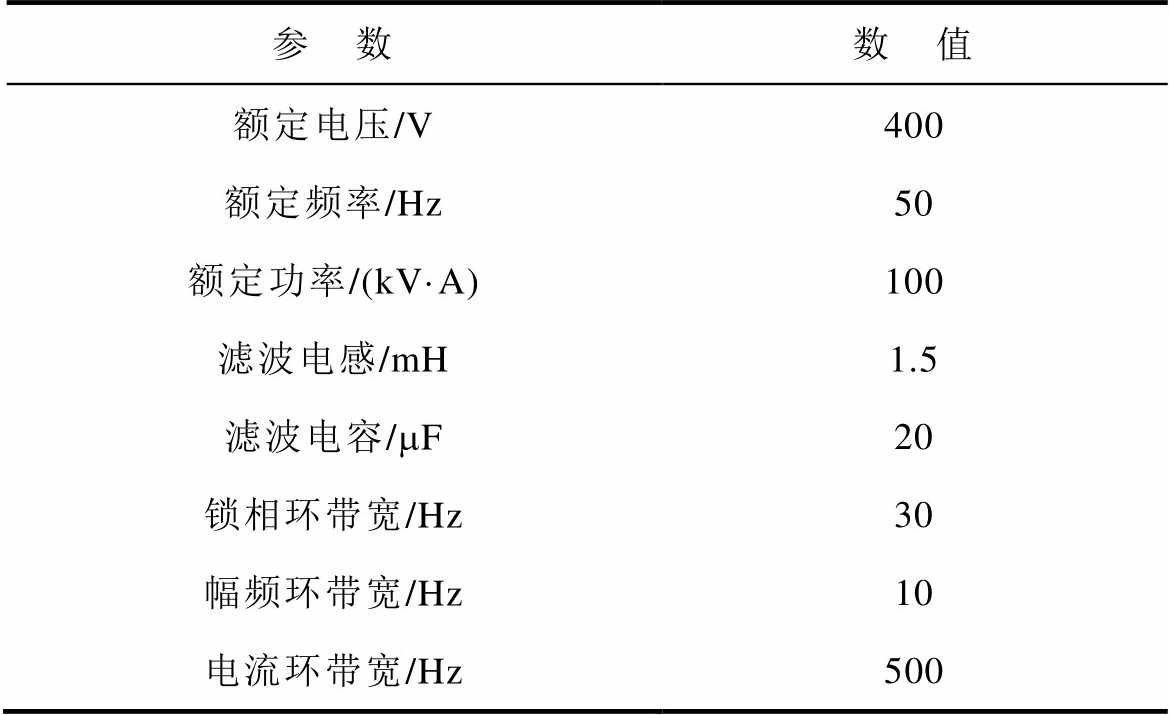
参 数数 值 额定电压/V400 额定频率/Hz50 额定功率/(kV·A)100 滤波电感/mH1.5 滤波电容/mF20 锁相环带宽/Hz30 幅频环带宽/Hz10 电流环带宽/Hz500
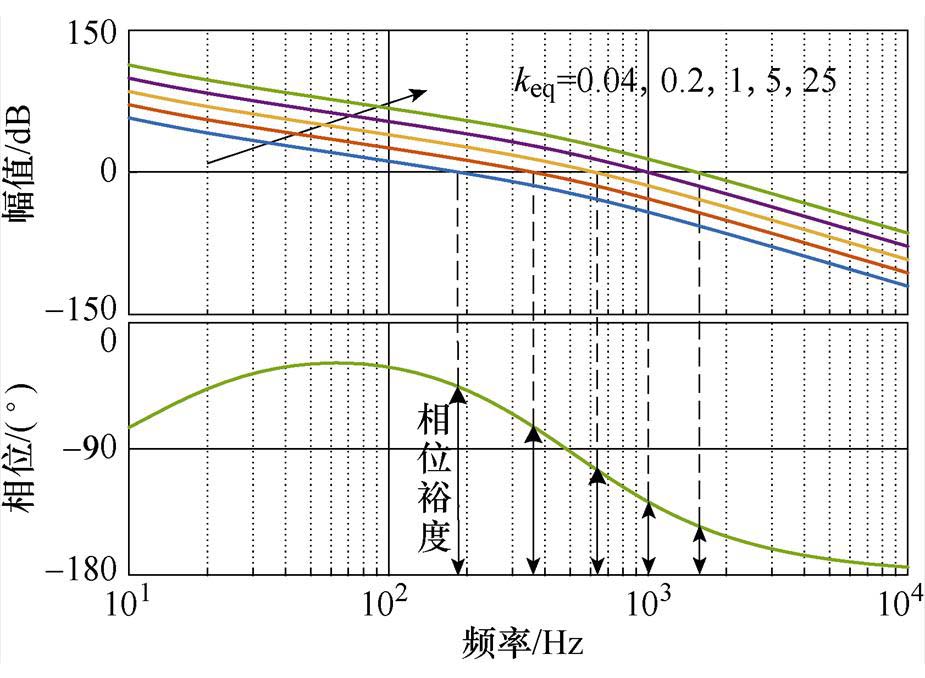
图6 传递函数TOL频率响应
Fig.6 Frequency response of transfer function TOL
图7给出了等效带宽增益系数动态下构网型电流矢量控制传递函数Gwu频率响应,其主要表征构网型电流矢量控制对受控目标电压幅值和频率的跟踪能力。可见,随着等效带宽增益系数增加,传递函数Gwu的截止频率(即-3 dB处的最小频率)分别为167、445、837、1 453、2 347 Hz,呈现逐渐增长趋势。由于动态调整时间与控制系统阻尼和截止频率成反比,截止频率的增加将缩短构网型电流矢量控制调整时间,但过大的等效带宽增益系数将会导致系统相位裕度降低,稳定性不足。
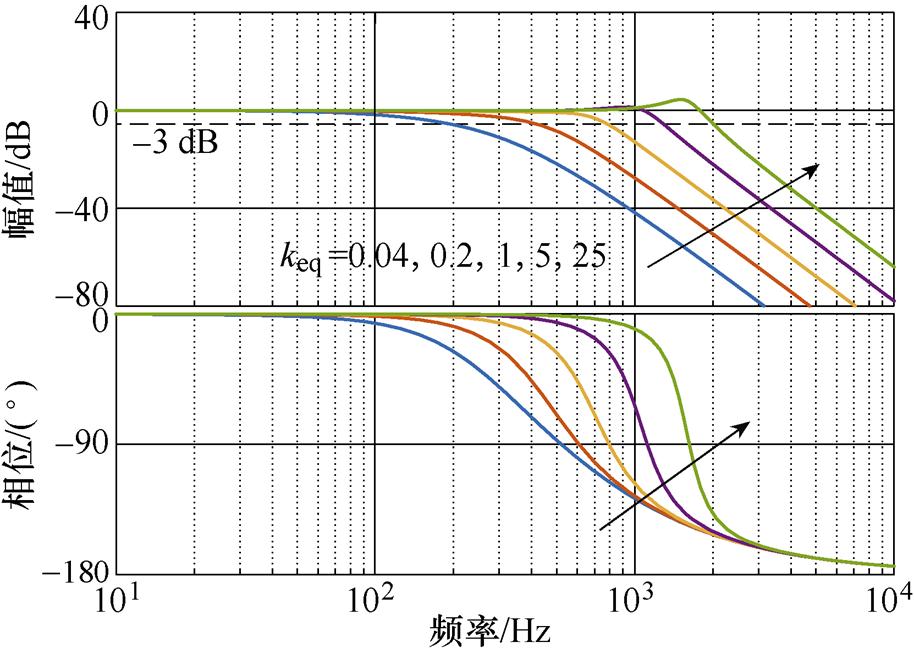
图7 传递函数Gwu频率响应
Fig.7 Frequency response of transfer function Gwu
为清晰表征构网型电流矢量控制对输出电流扰动的抗扰动能力,根据文献[20-21],可将Hod、Hoq变换到ab 两相静止坐标系中,则有
 (15)
(15)
 (16)
(16)
式中,w 为船舶电力系统的实际角频率,为便于后续分析,假定船舶电力系统实际频率与额定频率相同,即w=100p rad/s。
图8和图9分别给出了等效带宽增益系数动态下构网型电流矢量控制传递函数Hoa 和Hob 频率响应,其主要表征构网型电流矢量控制孤岛供电时外部有功/无功电流动态对电压幅值和频率维持能力。可见,在船舶电力系统实际频率w 处,Hoa 和Hob 的幅值均小于-20 dB,证明了构网型电流矢量控制策略具有对船舶电力系统外部负载动态的抗扰动能力,即可在负载动态下维持电压幅值和频率的稳定。这里需要指出,在第2节性能分析中由于忽略了锁相环动态性能,即构网型电流矢量控制可快速获取船舶电力系统频率,以保证构网型电流矢量控制具备同频率负载电流扰动的抗扰动能力。然而,实际运行中,考虑锁相环动态特性,需要对较宽频率负载电流扰动具备抗扰动能力,即在保证系统稳定的前提下,提高控制带宽(等效带宽增益系数)可增强构网型电流矢量控制对船舶电力系统负载电流扰动的抗扰能力。
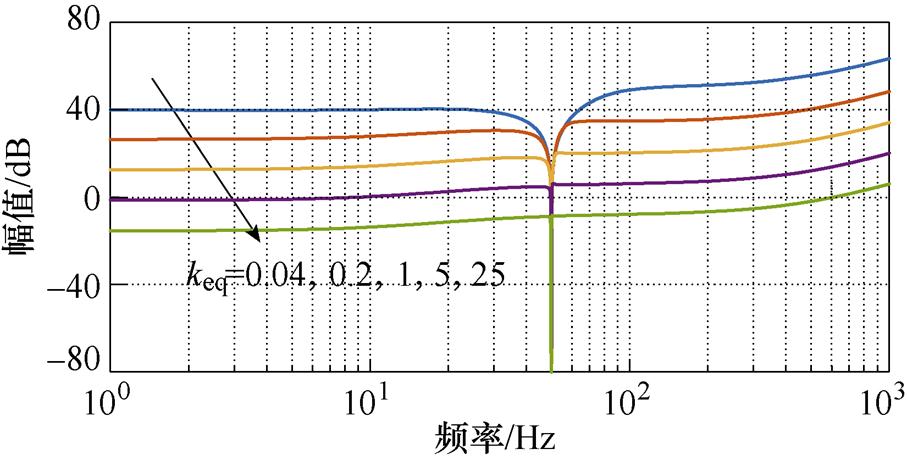
图8 传递函数Hoa 频率响应
Fig.8 Frequency response of transfer function Hoa
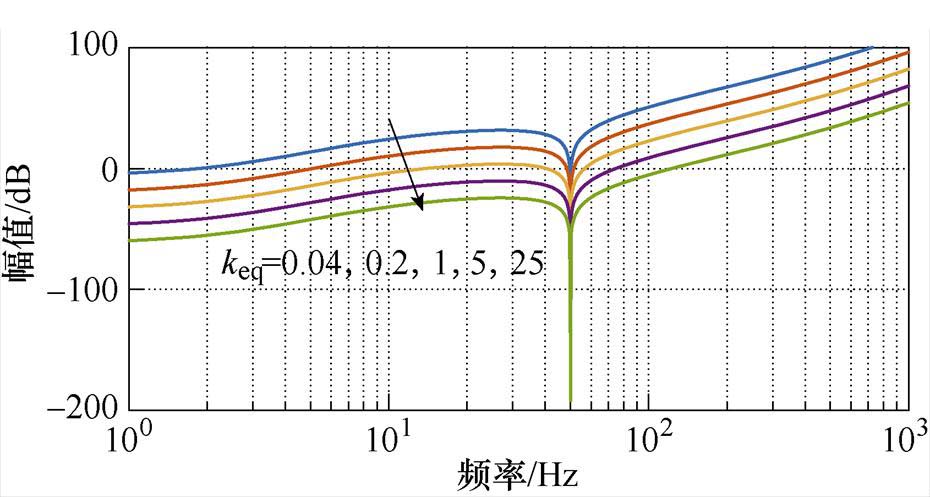
图9 传递函数Hob 频率响应
Fig.9 Frequency response of transfer function Hob
综上所述,通过构网型电流矢量控制等效带宽增益系数对稳定裕度、动态跟踪特性以及抗扰动能力的影响分析,在保证构网型电流矢量控制稳定裕度的前提下,可适度增大等效带宽增益系数,以增强电压幅值、频率跟踪能力以及负载电流抗扰动能力。
为验证构网型电流矢量控制的有效性,依托Starsim硬件在环测试装置,进行了硬件在环测试,如图10所示。其中,一次主回路在Satrsim MT 8020中实施模拟,控制算法运行在基于ARM的快速控制原型机中。船舶岸电变流器及其接入系统拓扑结构如图1所示,相关控制参数与表1保持一致。
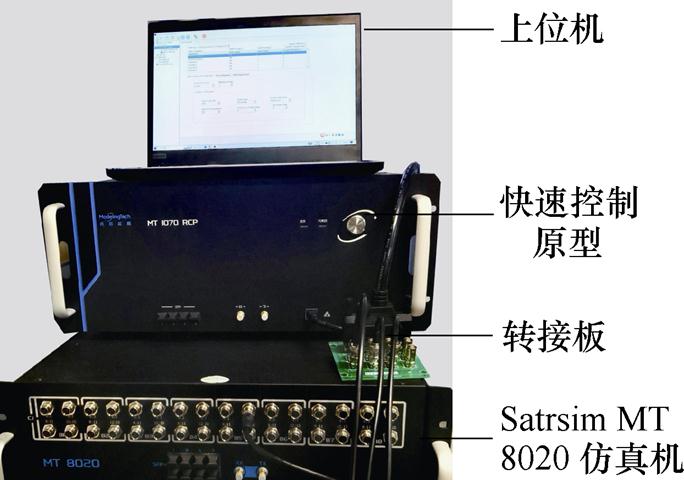
图10 硬件在环测试平台
Fig.10 Hardware-in-loop test setup
图11给出了岸电变流器并列运行的实验结果。图11中,船舶电力系统等值负荷为60 kW、40 kvar(感性)。图11a所示无预同步环节的直接并列过程中,由于两侧电压存在相位差,这将导致并联合闸瞬间出现明显过渡过程,持续时间约300 ms,峰值电流超过180 A。在图11b所示准整步并列过程中,预同步环节于约60 ms时刻使能,完成岸电侧与船电侧电压同步,约120 ms后符合并联合闸条件SW开关闭合,岸电变流器完成与船电系统并列。在图11c所示采用构网型电流矢量控制的自整步并列过程中,岸电变流器入网开关在40 ms时闭合,由于滤波电容会出现短时充电过程,但该过程衰减迅速,对船电侧电压幅值几乎无影响,岸电变流器在200 ms时完成调制建压。可见,构网型电流矢量控制自整步并列过程中无明显过渡过程,同时也避免了常规下垂控制岸电变流器先调制建压、后并联合闸所必需的预同步环节,操作简捷。
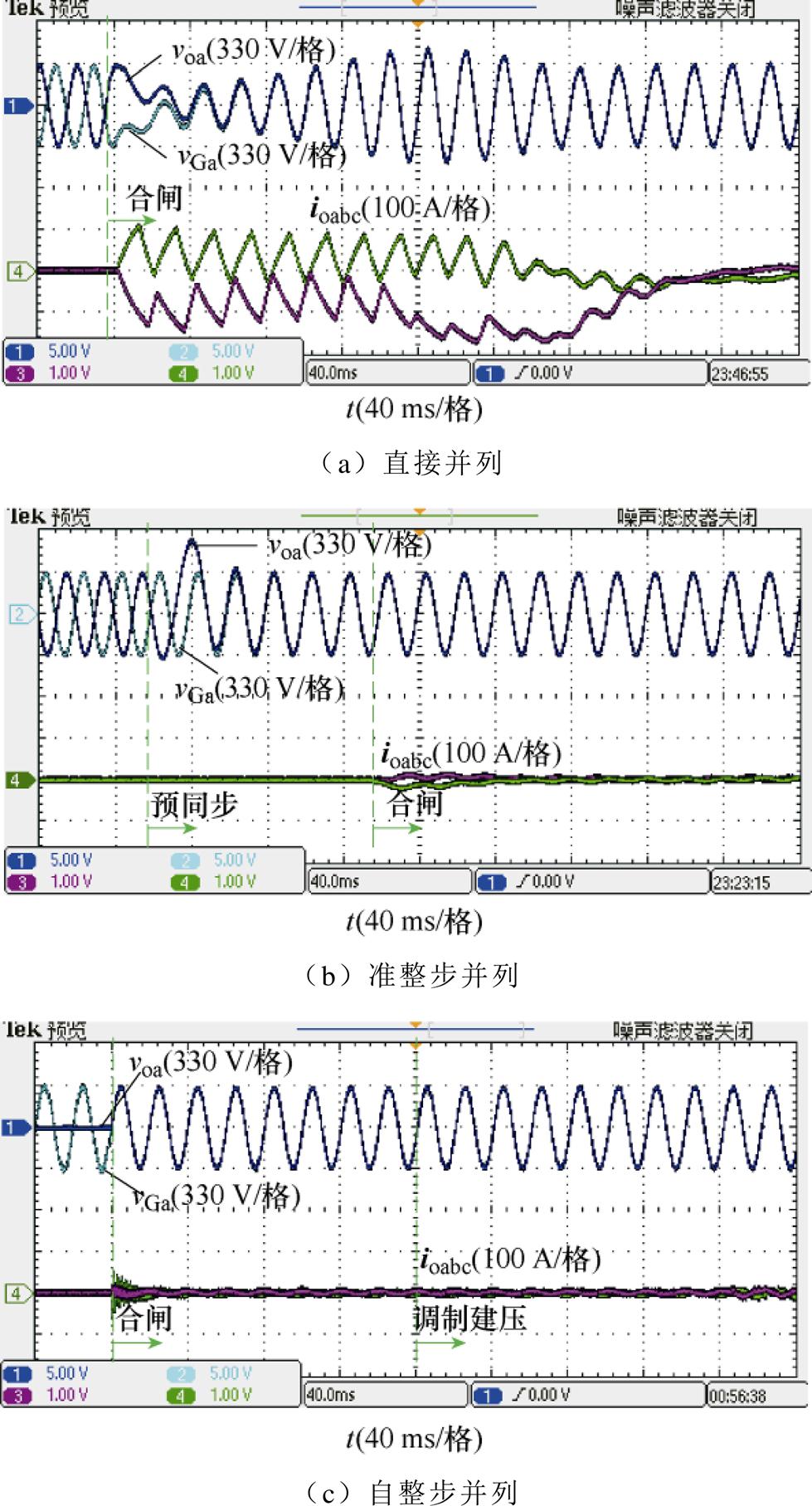
图11 岸电变流器并列运行实验结果
Fig.11 Experimental results of the shore converter for grid connection
图12给出了船用同步发电机减载过程下岸电变流器负荷转供实验结果。其中,船舶电力系统等值负荷为60 kW、40 kvar(感性)。可见,船用同步发电机有功、无功出力分别约在3.5 s、1.5 s时间内降至0,在负荷转供过程中,采用构网型电流矢量控制的岸电变流器可快速响应,填补有功、无功功率缺额,平滑完成船用同步发电机到岸电变流器的负荷转供。因此,在船电负荷转供期间,岸电变流器可自主填补船用同步发电机出力以降低额度,保证船舶电力系统电压幅值和频率恒定。
图13给出了采用构网型电流矢量控制的岸电变流器独立加减载的实验结果。其中,船舶电力系统有功负荷由60 kW增加至80 kW,而后减至60 kW恢复初始状态;无功负荷始终维持在40 kvar(感性)。在图13a中,船舶电力系统负荷增加瞬间,由于功率差额会导致电压幅值出现约-15%的下降,而后岸电变流器快速增加其输出电流至185 A,使船舶电力系统电压在30 ms左右时间内再次恢复为初始状态。图13b中,由于船舶电力系统负荷突降,功率出现盈余,导致系统电压出现约15%的骤升,持续约1个周波,而后岸电变流器快速响应电压动态降低出力,其输出电流降至140 A,约在30 ms后船舶电力系统进入稳定状态。
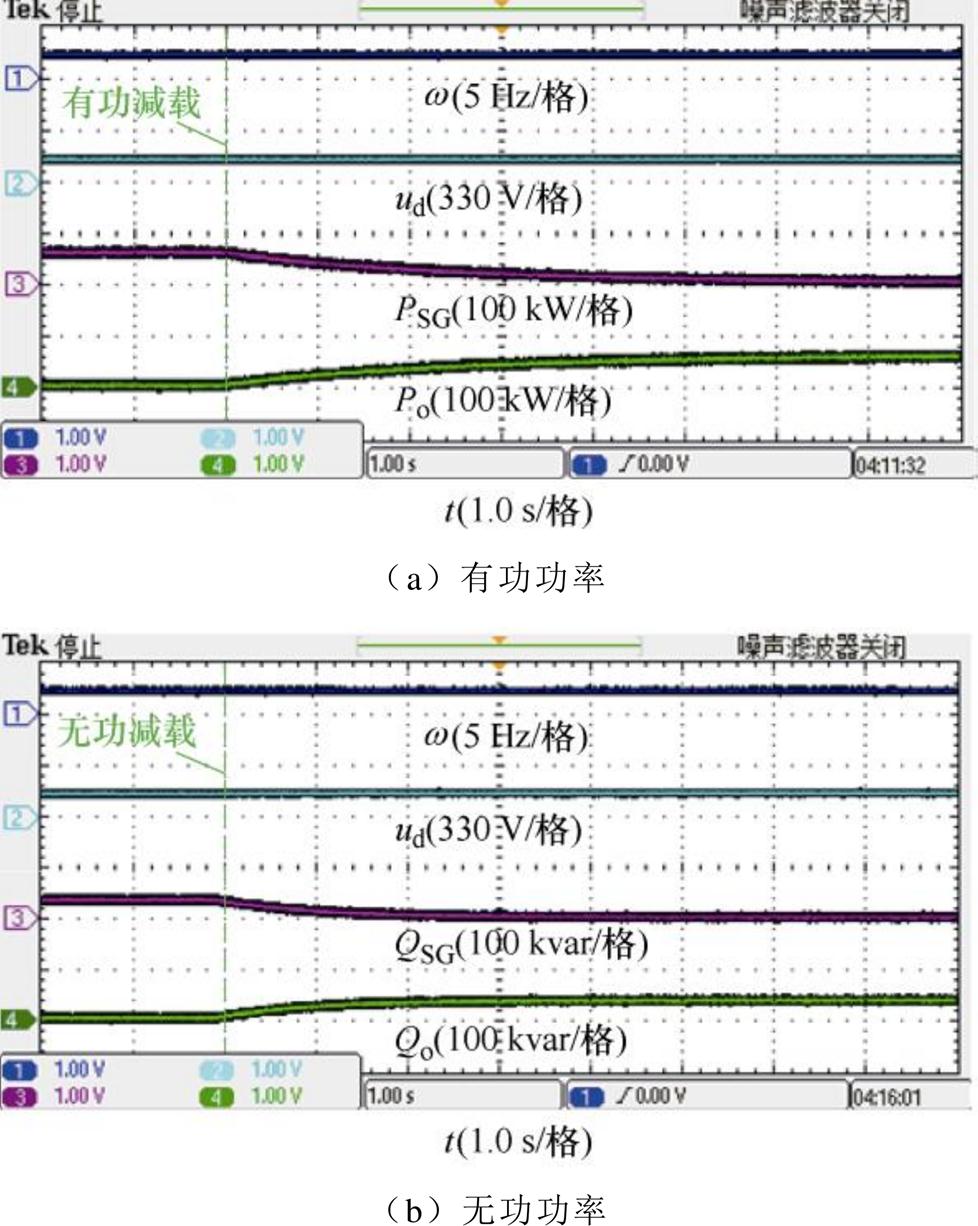
图12 岸电变流器负荷转供实验结果
Fig.12 Experimental results of the shore converter for ship load transfer
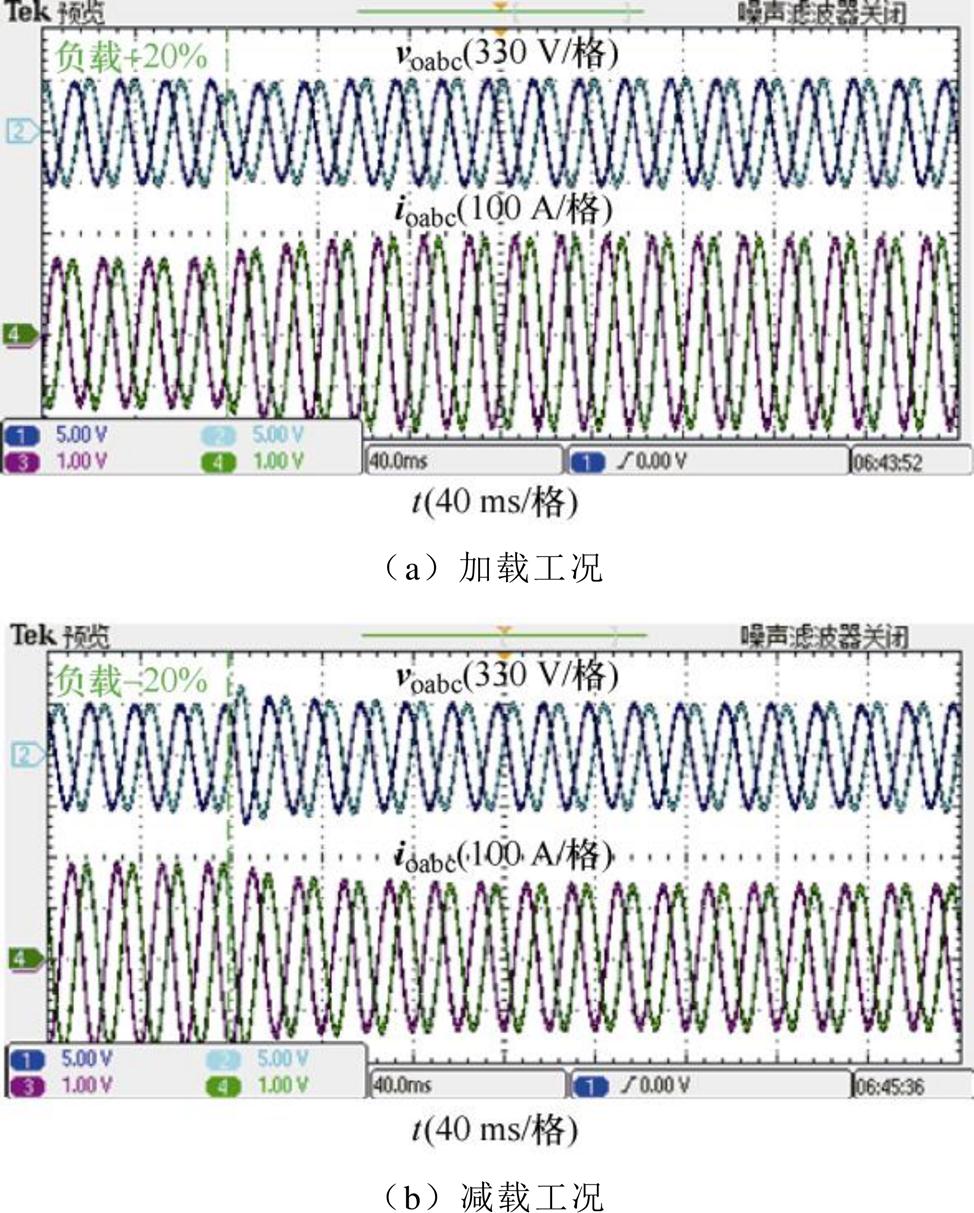
图13 岸电变流器加减载实验结果
Fig.13 Experimental results of the shore converter for increasing and decreasing load
图14给出了采用构网型电流矢量控制的岸电变流器独立供电下船电幅频调控的实验结果。其中,船舶电力系统频率、幅值设定值由50 Hz、330 V分别增至52 Hz(+2%)、386 V(+20%)。可见,在岸电变流器独立供电期间,船电系统电压幅值频率可响应幅频受控目标的改变,并在约1.0 s内完成幅频调节过程,实现独立供电期间船舶电力系统电压幅值和频率的有效控制。
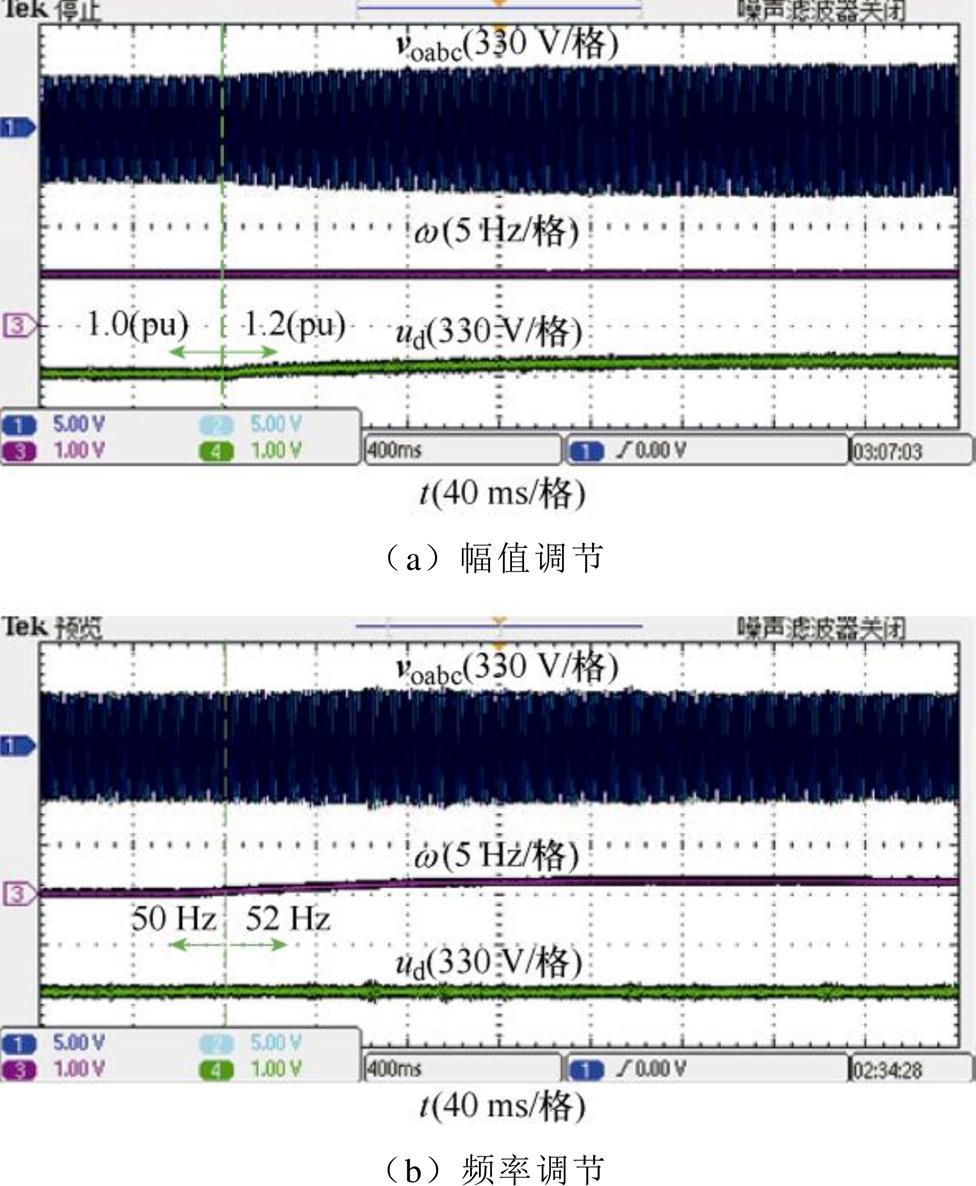
图14 岸电变流器调压调频实验结果
Fig.14 Experimental results of the shore converter for voltage amplitude and frequency regulation
综上所述,本文所提的船舶岸电用构网型电流矢量控制策略,不但可在无预同步条件下无冲击并入船舶电力系统,而且也可保证船舶电力系统电压幅值和频率的稳定。
本文提出了船舶岸电变流器用构网型电流矢量控制策略。该控制策略实施于锁相环定向的两相同步旋转坐标系中,通过幅频电压-矢量电流级联闭环,完成对岸电变流器输出电压的调控,可实现先并联合闸、后调制建压的岸电与船电电源无冲击自整步并列。由于利用锁相环用于替代常规有功-频率环,可在零功率输出下确定岸电变流器输出电压相位,避免了常规下垂控制岸电变流器准整步过程中先调制建压、后并联合闸所必需的预同步环节,并且利用幅频电压外环自主调节岸电变流器电流受控目标,在船电负荷转供与独立供电期间可自主填补功率缺额,维持船电侧电压幅值和频率的无差控制,具备船电系统电压构建能力。最后,通过硬件在环测试,验证了所提构网型电流矢量控制策略的有效性。此外,如何评估计及锁相环动态的构网型电流矢量控制对船舶电力系统电压和频率的调控能力将是下一步研究工作。
参考文献
[1] Qazi S, Venugopal P, Rietveld G, et al. Powering maritime: challenges and prospects in ship elec- trification[J]. IEEE Electrification Magazine, 2023, 11(2): 74-87.
[2] D’Agostino F, Grillo S, Infantino R, et al. High- voltage shore connection systems: grounding resi- stance selection and short-circuit currents evalu- ation[J]. IEEE Transactions on Transportation Elec- trification, 2022, 8(2): 2608-2617.
[3] Smolenski R, Benysek G, Malinowski M, et al. Ship-to-shore versus shore-to-ship synchronization strategy[J]. IEEE Transactions on Energy Conversion, 2018, 33(4): 1787-1796.
[4] Mahdi H, Hoff B, Østrem T. A review of power converters for ships electrification[J]. IEEE Transa- ctions on Power Electronics, 2023, 38(4): 4680- 4697.
[5] 王灿, 郭燚, 薛冬, 等. 基于改进NLM的模块化多电平变换器在船舶岸电系统中的应用[J]. 上海海事大学学报, 2023, 44(2): 111-118.
Wang Can, Guo Yi, Xue Dong, et al. Application of modular multilevel converters based on improved NLM in shore-to-ship power supply system[J]. Journal of Shanghai Maritime University, 2023, 44(2): 111-118.
[6] 谢震, 杨曙昕, 代鹏程, 等. 构网型全功率风电机组网侧变流器耦合分析及抑制策略[J]. 电工技术学报, 2023, 38(14): 3745-3758, 3768.
Xie Zhen, Yang Shuxin, Dai Pengcheng, et al. Grid- side coupling analysis and suppression strategy of grid-forming full-power wind turbines[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(14): 3745-3758, 3768.
[7] 谢沁园, 王瑞田, 林克文, 等. 基于端口电压积分与变下垂系数的逆变器并联下垂控制策略[J]. 电工技术学报, 2023, 38(6): 1596-1607.
Xie Qinyuan, Wang Ruitian, Lin Kewen, et al. Droop control strategy of parallel inverters based on port voltage integration and variable droop coefficient[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1596-1607.
[8] Karimi S, Zadeh M, Suul J A. Operation-based reliability assessment of shore-to-ship charging systems including on-shore batteries[J]. IEEE Transa- ctions on Industry Applications, 2023, 59(4): 4752- 4763.
[9] 陈建东, 叶志浩, 黄靖, 等. 基于模式切换的岸电电源控制策略研究[J]. 电工技术, 2021(17): 97-99.
Chen Jiandong, Ye Zhihao, Huang Jing, et al. Research on control strategy of shore-to-ship power supply system based on mode switching[J]. Electric Engineering, 2021(17): 97-99.
[10] 徐晓宁, 周雪松. 微网脱/并网运行模式平滑切换控制策略[J]. 高电压技术, 2018, 44(8): 2754-2760.
Xu Xiaoning, Zhou Xuesong. Control strategy for smooth transfer between grid-connected and island operation for micro grid[J]. High Voltage Engineering, 2018, 44(8): 2754-2760.
[11] 王开让, 赵一名, 孟建辉, 等. 基于自适应模型预测控制的光储虚拟同步机平滑并网策略[J]. 高电压技术, 2023, 49(2): 831-839.
Wang Kairang, Zhao Yiming, Meng Jianhui, et al. Smooth grid-connected strategy for photovoltaic- storage virtual synchronous generator based on adaptive model predictive control[J]. High Voltage Engineering, 2023, 49(2): 831-839.
[12] 周鹏, 张新燕, 邸强, 等. 基于虚拟同步机控制的双馈风电机组预同步并网策略[J]. 电力系统自动化, 2020, 44(14): 71-78.
Zhou Peng, Zhang Xinyan, Di Qiang, et al. Pre-synchronous grid-connection strategy of DFIG- based wind turbine with virtual synchronous gen- erator control[J]. Automation of Electric Power Systems, 2020, 44(14): 71-78.
[13] Talapur G G, Suryawanshi H M, Xu Lie, et al. A reliable microgrid with seamless transition between grid connected and islanded mode for residential community with enhanced power quality[J]. IEEE Transactions on Industry Applications, 2018, 54(5): 5246-5255.
[14] 魏亚龙, 张辉, 孙凯, 等. 基于虚拟功率的虚拟同步发电机预同步方法[J]. 电力系统自动化, 2016, 40(12): 124-129, 178.
Wei Yalong, Zhang Hui, Sun Kai, et al. Pre- synchronization method of virtual synchronous generator using virtual power[J]. Automation of Electric Power Systems, 2016, 40(12): 124-129, 178.
[15] 戚军, 李袁超, 童辉, 等. 基于动态虚拟电流前馈的预同步VSG功率二阶解耦策略[J]. 电网技术, 2020, 44(9): 3556-3565.
Qi Jun, Li Yuanchao, Tong Hui, et al. Second-order power decoupling control in pre-synchronized VSG based on dynamic virtual current feedforward control[J]. Power System Technology, 2020, 44(9): 3556-3565.
[16] Muhtadi A, Pandit D, Nguyen N, et al. Distributed energy resources based microgrid: review of archite- cture, control, and reliability[J]. IEEE Transactions on Industry Applications, 2021, 57(3): 2223-2235.
[17] 程鹏, 马静, 李庆, 等. 风电机组电网友好型控制技术要点及展望[J]. 中国电机工程学报, 2020, 40(2): 456-467.
Cheng Peng, Ma Jing, Li Qing, et al. A review on grid-friendly control technologies for wind power generators[J]. Proceedings of the CSEE, 2020, 40(2): 456-467.
[18] Li Longqi, Nian Heng, Ding Lijie, et al. Direct power control of DFIG system without phase-locked loop under unbalanced and harmonically distorted vol- tage[J]. IEEE Transactions on Energy Conversion, 2018, 33(1): 395-405.
[19] 刘其辉, 逄思敏, 吴林林, 等. 大规模风电汇集系统电压不平衡机理、因素及影响规律[J]. 电工技术学报, 2022, 37(21): 5435-5450.
Liu Qihui, Pang Simin, Wu Linlin, et al. The mechanism, factors and influence rules of voltage imbalance in wind power integration areas[J]. Transactions of China Electrotechnical Society, 2022, 37(21): 5435-5450.
[20] Wang Xiongfei, Harnefors L, Blaabjerg F. Unified impedance model of grid-connected voltage-source converters[J]. IEEE Transactions on Power Elec- tronics, 2017, 33(2): 1775-1787.
[21] 王震, 程鹏, 贾利民. 基于对称控制的三相并网变流器单输入单输出阻抗建模与分析[J/OL]. 电工技术学报, 2023: 1-14. https://doi.org/10.19595/j.cnki. 1000-6753.tces.222388.
Wang Zhen, Cheng Peng, Jia Limin. Single-input single-output impedance modeling and analysis of three-phase grid-tied converter based on symmetric control[J/OL]. Transactions of China Electrotechnical Society, 2023: 1-14. https://doi.org/10.19595/j.cnki. 1000-6753.tces.222388.
Abstract As the available power supply for ships in seaports, the shore converter can replace the synchronous generator with heavy diesel, resulting in less NOx, SOx, and other pollutants. The pre- synchronization method is employed for the continuous power supply between the ship generator and the shore converter. However, due to the inrush connecting current produced by the undesired phase angle difference, the shore source fails to replace the ship source. This paper develops the grid-forming vector current control for the shore converter.
The proposed control strategy is implemented in the synchronous reference frame of the ship power system determined by the phase-locked loop. The commanded current reference of the shore converter is produced by the voltage amplitude-frequency control loop, and the modulated converter voltage is obtained by the current control loop. With the pulse-width modulation, the seamless self-synchronization between the ship and the shore is achieved with the parallel connection and the voltage forming. On the one hand, the phase-locked loop is employed instead of the active power-frequency synchronization loop, which can generate the phase angle for the frame transformation and voltage modulation without power provision. The pre-synchronization for the quasi-synchronization with the voltage modulation and the parallel connection is avoided. On the other hand, the commanded current reference is generated from the measured voltage amplitude and frequency of the ship power system. This approach can provide the desired active and reactive power to maintain non-steady errors of the voltage amplitude and frequency during the load transfer and islanded supply. Consequently, the grid-forming capability of the ship power system is achieved.
Then, a mathematical model of the grid-forming vector current control is established. Accordingly, the system stability, voltage tracking capability, and sensitivity against load variations are analyzed. With the larger equivalent bandwidth coefficient of the grid-forming vector current control, higher voltage tracking capability and minor sensitivity against load variations are achieved while maintaining a sufficient stability margin.
Finally, hardware-in-loop tests are conducted in conditions of the shore-ship connection, shipload transfer, islanded power supply capability with load variations, and voltage amplitude and frequency regulation of the grid-forming vector current control. The proposed grid-forming vector current control achieves a seamless connection between the ship power system and the shore converter without pre-synchronization while maintaining the voltage amplitude and frequency stability of the ship power system.
Keywords:Shore converter, grid-forming, vector current control, ship power system, seamless transition
中图分类号:TM46
DOI: 10.19595/j.cnki.1000-6753.tces.231232
国家重点研发计划资助项目(2021YFB2601602)。
收稿日期 2023-07-31
改稿日期 2023-09-02
程 鹏 男,1988年生,副研究员,硕士生导师,研究方向为新能源并网分析、交通电力变换与控制等。
E-mail: p.cheng@ncepu.edu.cn(通信作者)
王笑睿 男,1999年生,硕士研究生,研究方向为船港新能源变换。
E-mail: wangxiaorui212@163.com
(编辑 陈 诚)