Tab.1 Summary and comparison of the existing position detection and segment switching method
文献辅助电源车-地通信车载端位置检测线圈传感器分段控制器周期性激活 [11]有有无无有无 [12]有无无电压/电流传感器有有 [13]有无无电流传感器有有 [15]有无一个无有无 [16]有无一个无有无 本文无无无无无无
摘要 为降低自动导引车(AGV)动态无线供电系统位置检测与分段切换的复杂度,该文提出一种集成了无通信位置检测功能的自动分段切换技术。位置检测线圈围绕发射线圈绕制,通过解耦电容解耦发射线圈与检测线圈,当接收线圈移动到发射线圈上方时,检测线圈只会在接收线圈磁场中产生感应出电压,此电压即为接收线圈的位置信号。结合提出的发射线圈分段切换策略,利用此感应电压驱动分段切换开关,对应的发射线圈自动开通。无需通信、分段切换控制器、辅助电源等装置,便能同时完成位置检测与分段切换。500 W功率等级原理样机实验结果表明,当接收线圈移动时,接收线圈位置能被检测线圈准确地检测到,检测线圈可驱动发射线圈以正确的次序分段切换,与理论分析一致。
关键词:自动导引车 动态无线供电 位置检测 分段切换
自动导引车(Automated Guided Vehicle, AGV)作为现代物流体系中重要的一环,广泛应用于物流仓库、港口等场合。当前,AGV续航里程短、充电位置固定、充电时间长的问题始终制约着物流效率的提升。动态无线供电(Dynamic Wireless Power Transfer, DWPT)可为移动中的AGV实现非接触、不间断供电,不但能延长其续航里程,还能减少其电池的体积和重量[1-7],是提升AGV运行效率的可行方案。在设计AGV动态无线供电系统的过程中,系统成本和AGV紧凑的内部空间是设计的重要考量,因此,AGV亟须一种结构简单、体积小、低成本的DWPT系统。
根据发射线圈相对于接收线圈的长度比例,DWPT系统分为长导轨型DWPT系统和分段导轨型DWPT系统[8]-[9]。长导轨型DWPT系统虽然电路结构简单,但是其发射线圈长度远大于接收线圈,导致漏磁和电磁辐射大、耦合系数低、系统效率不高,并不适合AGV应用。而分段导轨型DWPT系统具有控制灵活、供电效率高等特点,是AGV动态无线供电的不二选择。然而,AGV在工作时连续、快速地来回运动,致使其DWPT系统发射线圈的分段切换具备频率高、次数多和不间断的特点。因此,保障接收线圈的准确位置检测与发射线圈的及时准确可靠切换是实现AGV动态无线供电系统高效稳定运行的关键。
接收线圈的位置检测方法可分为通信类、参数识别类和检测线圈类三类。对于通信类方法,最常用的方式是全球定位系统,但其定位精度相对于小体积的AGV来说,难以满足接收线圈的定位需求[10]。射频通信技术也可用于接收线圈的位置检测,通过射频模块可检测接收线圈的位置[11]。然而,在紧凑的AGV内部射频模块可能会被传能线圈的高频磁场干扰,导致通信不稳定,影响位置检测的精度,发射线圈切换不平稳。
参数识别类的位置检测方法通过检测车载接收线圈来临/远离时的系统参数变化,实现接收线圈的位置检测。通过测量系统发射端的反射阻抗,可实现接收线圈的位置检测[12]。也可直接测量系统发射端的电流,处理电流数据实现接收线圈位置检测与发射线圈分段切换[13]。还有研究通过测量接收线圈在闭合回路中的感应采集的电流,能实现位置检测[14]。然而,利用参数识别类方法对接收线圈进行位置检测时,需要周期性地激活逆变器或者发射线圈进行探测,增加了待机损耗。
检测线圈类方法相对于参数识别类而言,无需周期性地激活发射线圈。奥克兰大学的研究人员利用发射端的检测线圈在接收端检测线圈磁场中感应出的电压实现位置检测[15]。犹他州大学团队通过在发射端设置品字形检测线圈,不但能检测接收线圈位置还能探测到接收线圈的偏移[16]。橡树岭国家实验室在发射端设置正交十字检测线圈,当发射端检测线圈感应电压达到阈值时,认为接收线圈被探测到,完成发射线圈切换[17]。现有的检测线圈类方法为了避免检测线圈与DWPT主电路串扰,要求车载检测线圈的工作频率远大于DWPT主电路的频率,因此需在车载端额外设置高频逆变器。然而,系统车载接收端的检测线圈、额外逆变器与其余配套硬件使得系统变得冗杂,成本升高,不适合内部空间紧凑的AGV。
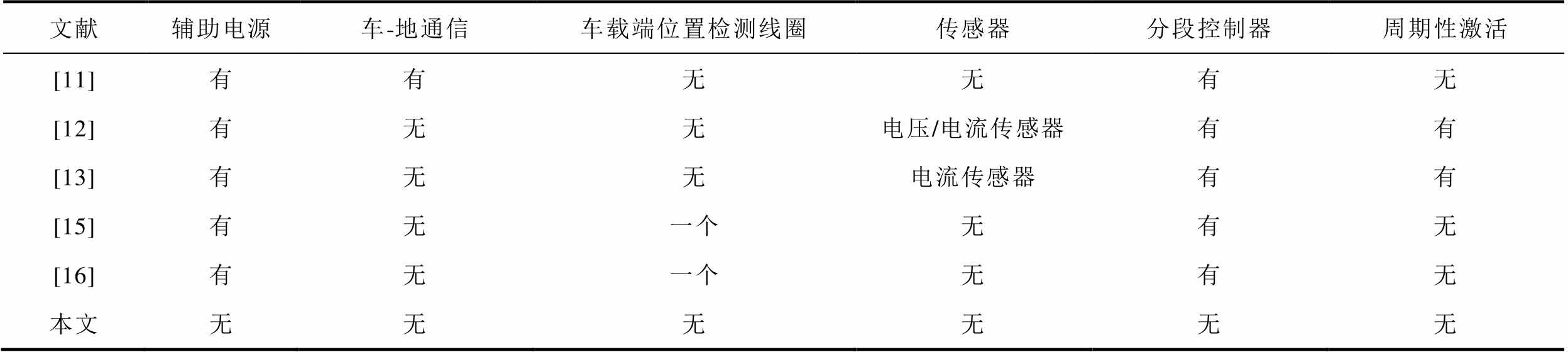
现有的接收线圈位置检测方法与所提出方法的总结与对比见表1。为了实现位置检测,现有研究有的需要设置车-地通信模块,有的需要传感器、多个检测线圈或者其他硬件,并且这些方法都需控制器处理接收线圈的位置信号,并输出分段切换信号实现分段切换。现有方法在复杂度与成本方面与AGV的DWPT需求还存在差距。
表1 现有位置检测与分段切换方法的总结与对比
Tab.1 Summary and comparison of the existing position detection and segment switching method
文献辅助电源车-地通信车载端位置检测线圈传感器分段控制器周期性激活 [11]有有无无有无 [12]有无无电压/电流传感器有有 [13]有无无电流传感器有有 [15]有无一个无有无 [16]有无一个无有无 本文无无无无无无
针对AGV无线供电系统的结构简单、体积小和成本低的实际需求,本文提出了一种无通信位置检测与自动分段切换技术。利用解耦电容解耦发射线圈和检测线圈,当接收线圈运动到发射线圈上方时,检测线圈便只会在发射线圈磁场中感应出电压,此感应电压可认为是发射线圈的位置信号。提出对应的分段切换策略,利用此感应电压直接驱动发射线圈分段切换开关,随着接收线圈的移动,对应的发射线圈被自动开通/关断,只需在发射端设置检测线圈便能同时完成接收线圈的无通信位置检测和发射线圈的自动分段切换。相较于现有的位置检测与分段切换方法,无需通信模块、传感器、分段切换控制器或者为切换开关配备辅助电源,接收端也无需检测线圈或者额外器件,这与AGV动态无线供电系统结构简单、体积小、成本低的要求相匹配。
所提出的带有位置检测线圈的动态无线供电系统架构如图1所示。图1中各个符号的意义见表2。
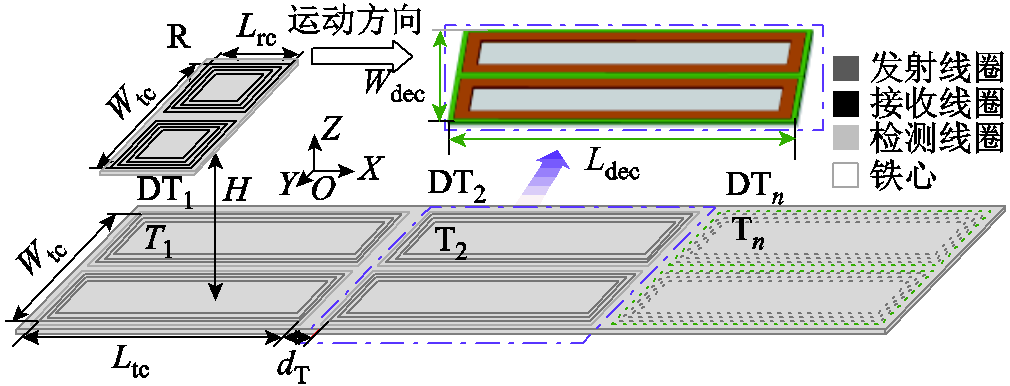
图1 所提出系统的结构
Fig.1 The structure of the proposed system
表2 图1中的符号含义
Tab.2 The meaning of the symbols in Fig.1

符号含义 Ltc和Wtc发射线圈的长度和宽度 Lrc和Wrc接收线圈的长度和宽度 Ldec和Wdec检测线圈的长度和宽度 dT发射线圈之间的间隙 H发射端和接收端的气隙
地面端发射线圈阵列由n个相同的发射线圈Tn组成,系统通过发射线圈阵列向接收线圈R传输能量。检测线圈围绕发射线圈中心绕制,二者长度相同。检测与发射线圈采用了相同的线圈结构,便于接收线圈在拾取能量的同时激活对应的检测线圈。为避免发射线圈磁场干扰检测线圈,影响接收线圈的位置检测,对检测线圈与发射线圈进行了解耦。
对发射线圈和检测线圈采用了一种基于解耦电容的解耦方法[18],如图2所示。图2a中发射线圈与检测线圈通过一个公共端与解耦电容CM相连接,图2b所示为等效的解耦电路,互感MTD可等效为对应的电感MTD连接在电路中。若使得CM和电感MTD的阻抗值互相抵消,那么便能实现发射线圈与接收线圈的解耦。解耦电容CM的电容值大小需满足式(1)。
 (1)
(1)
式中,f为系统谐振频率。
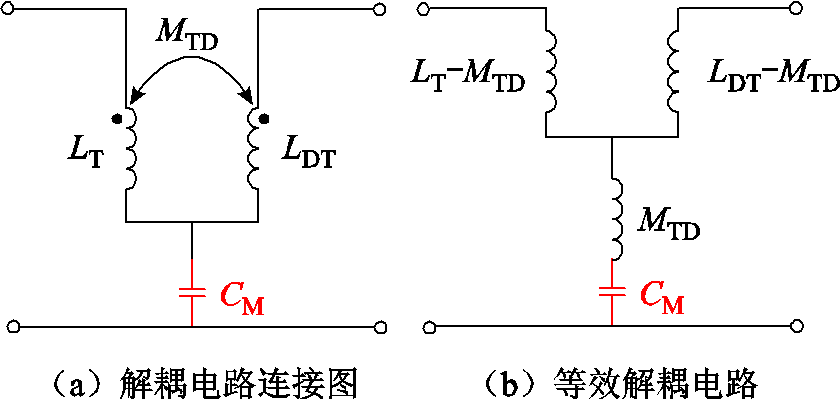
图2 电路解耦方法
Fig.2 The circuit decoupling method
系统电路拓扑如图3所示,电感L1i、电容C1i和电容CTi(i=1, 2, ···, n)组成发射端的LCC拓扑。LCC拓扑发射线圈恒流,发射线圈磁场恒定,有利于DWPT系统的能量传输。电容CMi可以抵消发射线圈Ti和检测线圈DTi之间的互感MTDi,使得两线圈解耦,电容CR为接收线圈自感LR的补偿电容。MTRi为发射线圈Ti与接收线圈R之间的互感;MRDi为检测线圈DTi与接收线圈R之间的互感。
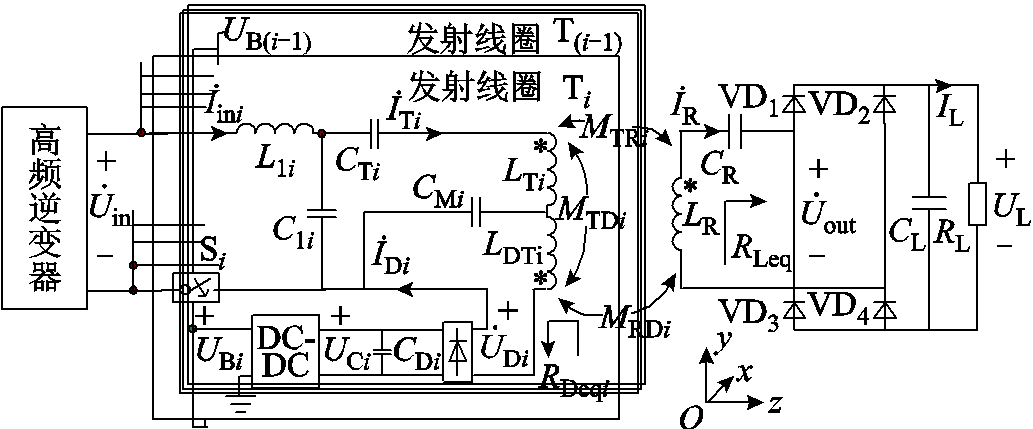
图3 系统电路拓扑
Fig.3 System circuit topology
利用基波分析法和基尔霍夫电压定律,系统可描述为
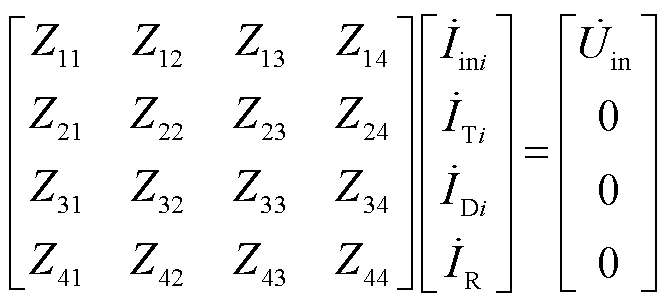 (2)
(2)
式(2)阻抗矩阵中每个阻抗变量的具体表达式为
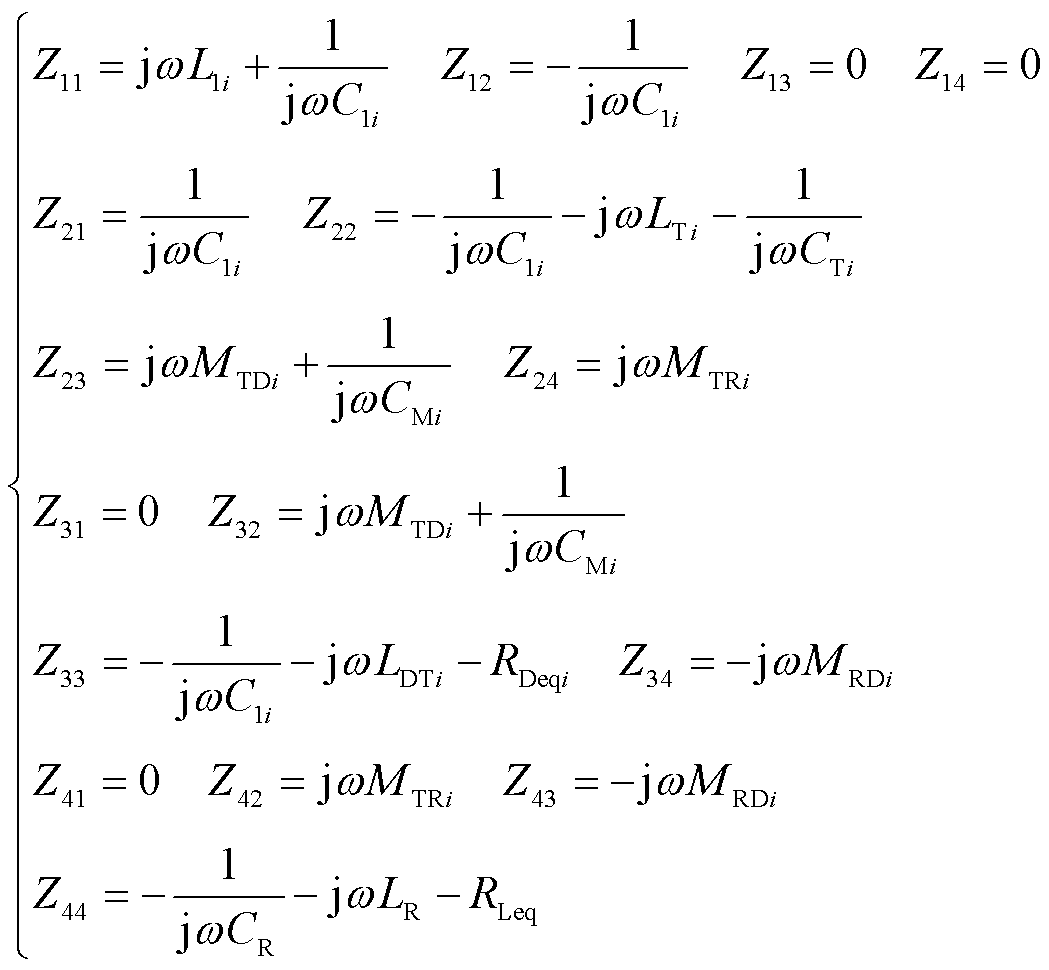 (3)
(3)
系统工作时,系统主功率电路应工作在同一谐振频率下。规定系统的谐振角频率为ω,其定义为
 (4)
(4)
将式(3)和式(4)代入式(2)中,得到接收线圈电流İR的表达式为
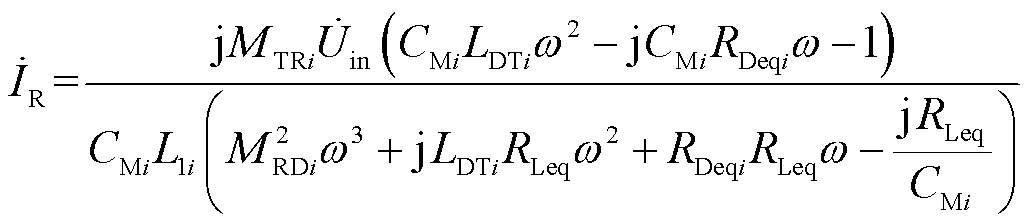 (5)
(5)
在实际系统中,检测线圈的后级电路等效电阻RDeqi远大于负载的等效电阻RLeq,因此可对式(5)进行简化,具体简化过程如下。
 (6)
(6)
式(6)中变量B、C、D、E、F、G和H的具体表达式为
 (7)
(7)
将系统各参数的实际值代入式(7)中,发现分子中的变量C在数值上远大于变量B和D,分母中的变量G在数值上远大于变量E、F和H,所以电流İR的表达式可简化为
 (8)
(8)
从式(8)中可以发现,检测线圈的存在对接收线圈电流值的影响可以忽略,说明检测线圈并不影响系统主功率的传输。
由于发射线圈与检测线圈解耦,发射线圈磁场在检测线圈中感应出的电压与解耦电容上的电压相互抵消。那么检测线圈的感应电压 可认为只由接收线圈的磁场感应出来,其表达式为
可认为只由接收线圈的磁场感应出来,其表达式为
 (9)
(9)
检测线圈感应电压整流后的输出电压UCi的表达式为
 (10)
(10)
式中,UDi和IR分别为 和İR的有效值。从式(10)中可以看出,检测线圈输出电压UCi只与接收线圈电流有效值IR和接收与检测线圈的互感MRDi相关。
和İR的有效值。从式(10)中可以看出,检测线圈输出电压UCi只与接收线圈电流有效值IR和接收与检测线圈的互感MRDi相关。
当接收线圈R1运动到发射线圈Ti与检测线圈DTi上方时,检测线圈输出电压UCi经后级DC-DC模块稳压后输出电压UBi直接驱动切换开关Si导通,对应的发射线圈开启,此时认为检测线圈完成激活过程。采用继电器作为分段切换开关,检测线圈输出电压UCi直接驱动继电器,实现发射线圈的无分段控制器分段切换。
位置检测系统原理如图4所示,位置检测的过程可分为两个阶段。阶段①:发射线圈传输能量到接收线圈,接收线圈感应出电压并产生电流İR;阶段②:接收线圈的磁场在检测线圈中感应出电压 ,经后级电路处理后输出电压UBi,直接驱动分段切换开关Si导通,接收线圈被探测到。
,经后级电路处理后输出电压UBi,直接驱动分段切换开关Si导通,接收线圈被探测到。
此过程建立的能量通道为:发射线圈→接收线圈→检测线圈。因此,只要接收线圈运动到恰当的位置,同时与发射线圈和检测线圈发生耦合,形成由发射线圈、接收线圈和检测线圈组成的三线圈结构,接收线圈就能被检测线圈探测到。
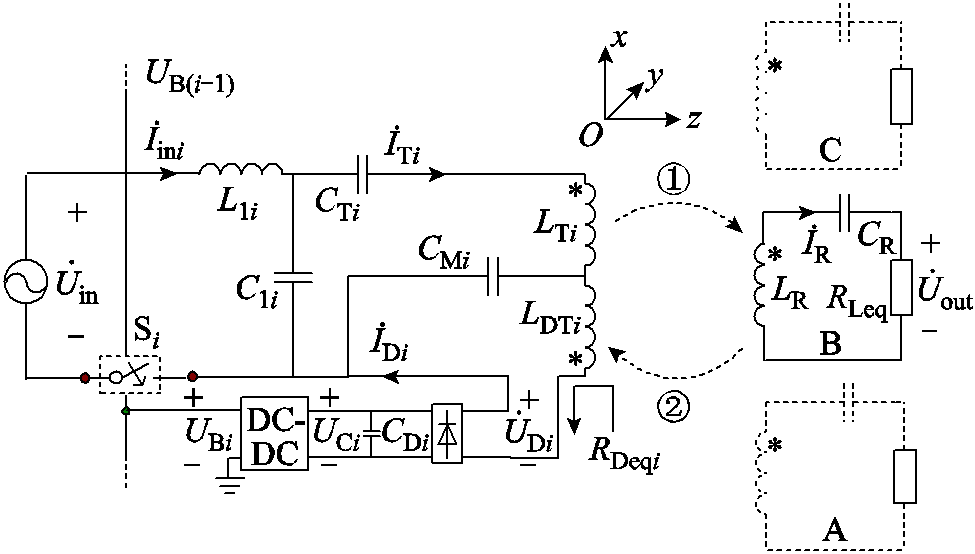
图4 位置检测系统原理
Fig.4 Schematic of the position detection system
当接收线圈运动到图4中的位置B,即发射线圈Ti上方时,三线圈结构形成,接收线圈R1作为“中继线圈”,检测线圈DTi被激活,接收线圈R1的位置被探测到。当接收线圈R1位于位置A和位置C时,其与发射线圈和检测线圈的互感几乎为零,检测线圈无法被激活。此位置检测方法的本质是将接收线圈当作发射线圈和检测线圈之间的“能量桥梁”,当接收线圈运动到对应发射线圈和接收线圈上方时,“能量桥梁”建立,检测线圈被激活。
检测线圈的感应电压不仅作为位置检测信号,还能直接驱动切换开关导通,同时,由于发射线圈分段切换开关所需的驱动功率并不大,检测线圈的线径可以远小于主电路能量传输线圈的线径,具有一定经济性。
发射线圈的分段切换需遵循两条原则:①为了保证接收线圈运动到两发射线圈分段区间时输出电压的稳定性,一个检测线圈需同时驱动两个切换开关导通,即DTi需同时驱动Si和Si+1来开通Ti和Ti+1,并且为了保证分段切换不影响输出电压的稳定性,Si只有在Ti和R1互感几乎为零时才能关断;②为了发射线圈能够随着接收线圈的移动不断地被开通/关断,对于两个相邻的检测线圈DTi和DTi+1来说,DTi+1须在DTi休眠之前被激活,以保证发射线圈分段切换的连续性。
发射线圈分段切换原理如图5a所示,检测线圈感应电压UCi随接收线圈移动的变化如图5b所示。当检测线圈感应电压UCi大于DC-DC模块的阈值电压UBinL时,分段切换开关Si便被导通。以发射线圈T1、T2和T3为分段实例,当接收线圈R1沿x轴移动时发射线圈的分段切换可划分为三种状态。状态1:接收线圈R1移动到发射线圈T1上方,三线圈结构形成,检测线圈DT1被激活,分段切换开关S1和S2导通发射线圈T1和T2被开通;状态2:接收线圈R移动到发射线圈T1和T2的分段区间,互感MRD1变小的同时互感MRD2变大导致UC1增大、UC2减小,并且UC1与UC2的交点电压大于DC-DC模块的阈值电压UBinL,表明当R运动到区间某个点时,DT2先被激活使得T3开通,之后DT1会被休眠使得T1关断;状态3:接收线圈R运动在发射线圈T2上方,检测线圈DT1休眠,检测线圈DT2仍保持激活状态驱动分段切换开关S2和S3,并开启发射线圈T2和T3。
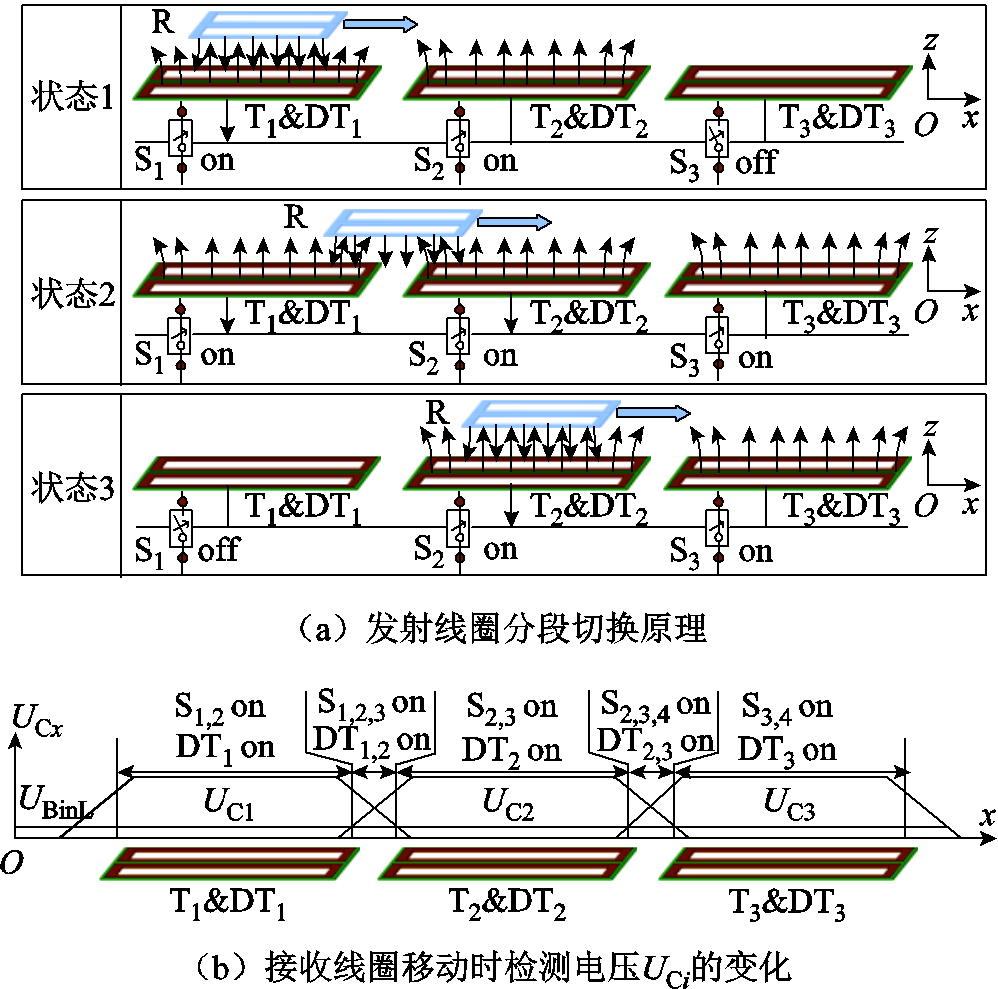
图5 分段切换策略原理示意图
Fig.5 Schematic of the segmented switching strategy
状态1和状态2可认为是发射线圈分段切换的一个周期,其余周期也可被类似地分析。对于系统的第一个发射线圈而言,需辅助手段开通或将其设置为常开状态,而对于后续的发射线圈,只需接收线圈沿运动方向运动,即可实现无控制器自动分段切换。
现有的动态无线电能传输系统主要采用的线圈制式有圆形线圈、D线圈和DD线圈三种。圆形线圈相较于D线圈与DD线圈而言,在同样的充电区域长度下,所需的发射线圈个数更多,系统也更复杂。所以本文只考虑在DD线圈和D线圈中选取一种,二者的结构示意图如图6所示。
在有限元仿真软件中,分别以DD线圈和D线圈为系统线圈制式搭建了对应的仿真模型,二者的线圈尺寸与匝数均相同。不同线圈的磁场分布如图7所示。
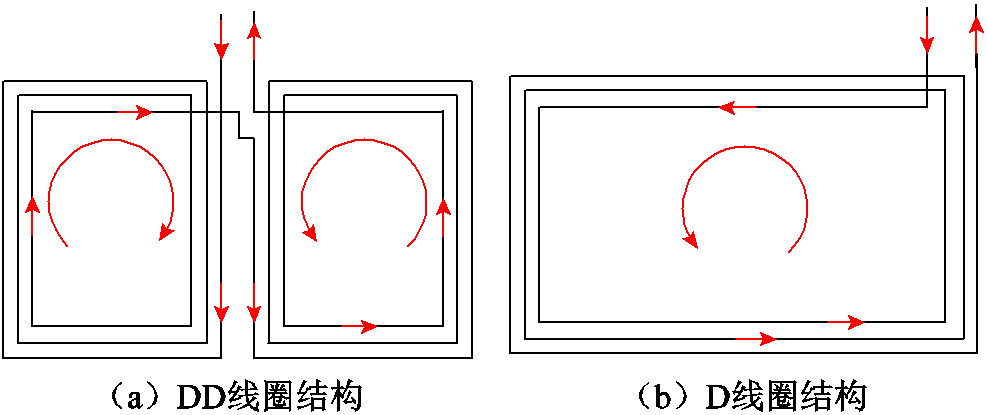
图6 DD线圈与D线圈结构示意图
Fig.6 The DD coil and D coil structure diagram
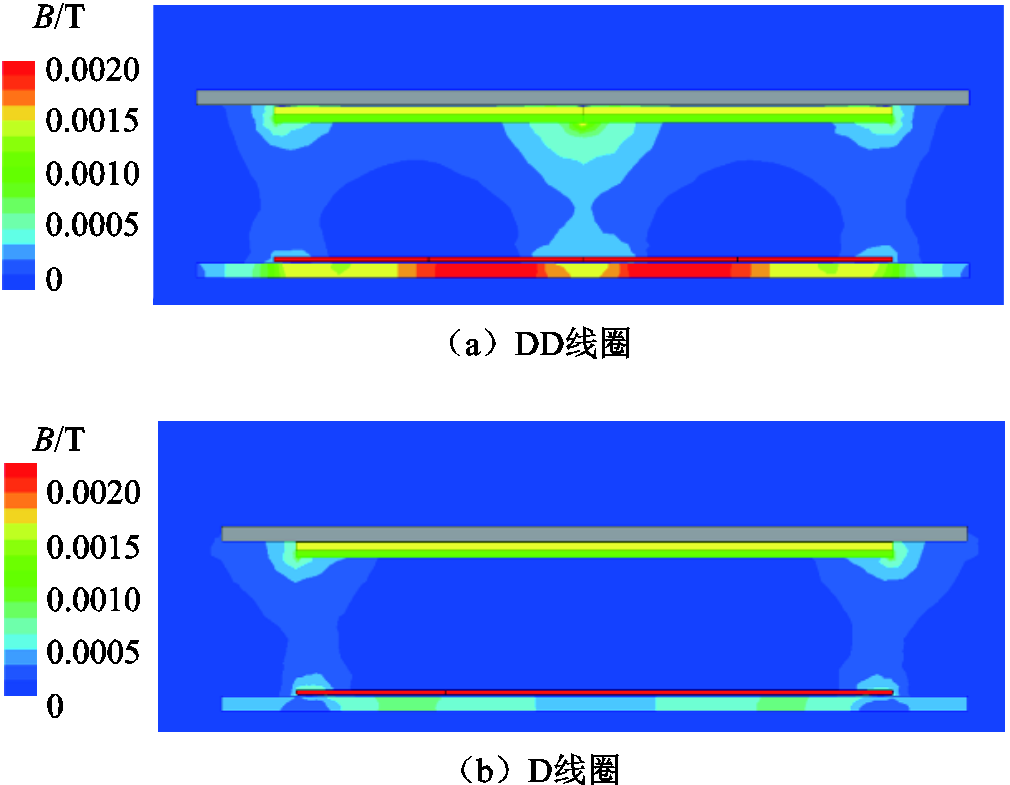
图7 DD线圈与D线圈磁感应强度分布
Fig.7 Magnetic induction intensity distribution of DD coil and D coil
从图7所示的磁场分布来看,DD线圈不仅磁场耦合更强,而且DD线圈边缘的漏磁通明显小于D线圈。
相邻线圈交叉耦合系数的仿真结果见表3。从表3中可以看出,采用DD线圈系统相邻线圈的交叉耦合远小于采用D线圈的系统,交叉耦合影响可忽略,对检测系统的影响小。
表3 DD线圈和D线圈系统的交叉耦合系数
Tab.3 The coupling coefficient of DD coil and D coil system cross coupling

类型耦合系数 DD线圈D线圈 相邻发射交叉耦合0.005 20.048 相邻检测交叉耦合0.005 80.018 相邻发射与检测交叉耦合0.005 40.029
仿真了接收线圈过分段时的发射-接收线圈互感变化情况,DD线圈过分段时的互感跌落为25.3%,而D线圈的互感跌落为55.17%。DD线圈纵向抗偏移能力强[19],接收线圈过分段时发射-接收互感跌落小,系统输出电压在接收线圈过分段时更加平滑。
DD线圈相较于D线圈而言,其漏磁小、磁场耦合强、相邻线圈交叉耦合小,并且接收线圈过分段时互感跌落小,所以本文选取DD线圈作为系统线圈制式。
当接收线圈的磁场在检测线圈中感应出电压后,还需经整流器和DC-DC模块处理才能驱动分段开关。因此,当接收线圈正对发射线圈时,检测线圈输出电压UCi的值需处于区间[UDinL, UDinH]中,其中UDinL和UDinH分别为分段切换开关驱动电压的下限值和上限值。
从式(8)和式(10)可以发现,当DWPT系统电路参数例如Uin、MTRi和RL确定后,检测线圈输出电压UCi只取决于接收和检测线圈的互感MRDi。因此,根据检测线圈电压UCi值的区间[UDinL, UDinH],不难知道互感MRDi的值应处于区间[MRDmin, MRDmax]中,其中MRDmin和MRDmax分别对应UDinL和UDinH。在DWPT系统参数确定后,MRDi主要取决于两个参数:检测线圈的匝数和检测线圈的面积。检测线圈的设计流程如图8所示。
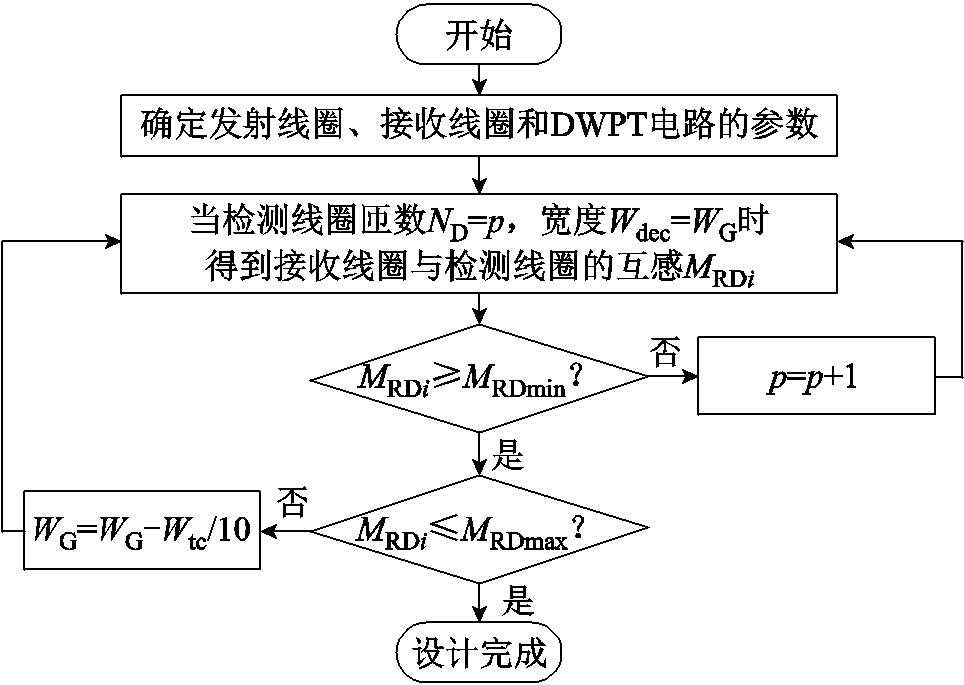
图8 检测线圈设计流程
Fig.8 The design flow chart of detection coil
WG为检测线圈宽度的变化量,初始值为发射线圈长度Wtc。p为表示检测线圈匝数的变量,初始值为1。通过改变检测线圈匝数与宽度对互感MRDi进行调整。
(1)确定发射线圈、接收线圈和DWPT系统的参数,并认为此时接收线圈位于发射线圈正上方。
(2)检测线圈围绕发射线圈中心绕制,其匝数为p、宽度为WD,通过有限元仿真得到检测线圈与接收线圈的互感MTRi。
(3)判断互感MRDi的值是否位于区间[MRDmin, MRDmax]中。若MRDi≤MRDmin,增加检测线圈的匝数ND以增加互感MRDi;若MRDi≥MRDmax,从线圈两边向中心减少检测线圈的宽度以降低互感MRDi;若MRDi处于目标区间[MRDmin, MRDmax]中,设计过程完成。
本文搭建了一个有三个发射线圈、三个检测线圈和一个接收线圈的实验原理样机,如图9所示。

图9 实验原理样机
Fig.9 Prototype of the proposed system
原理样机的系统参数见表4,其中NT、NR和NDT分别为发射线圈、接收线圈和检测线圈的匝数。表中的互感值为接收线圈正对发射线圈时的线圈之间的互感值。
表4 系统参数
Tab.4 System parameter values
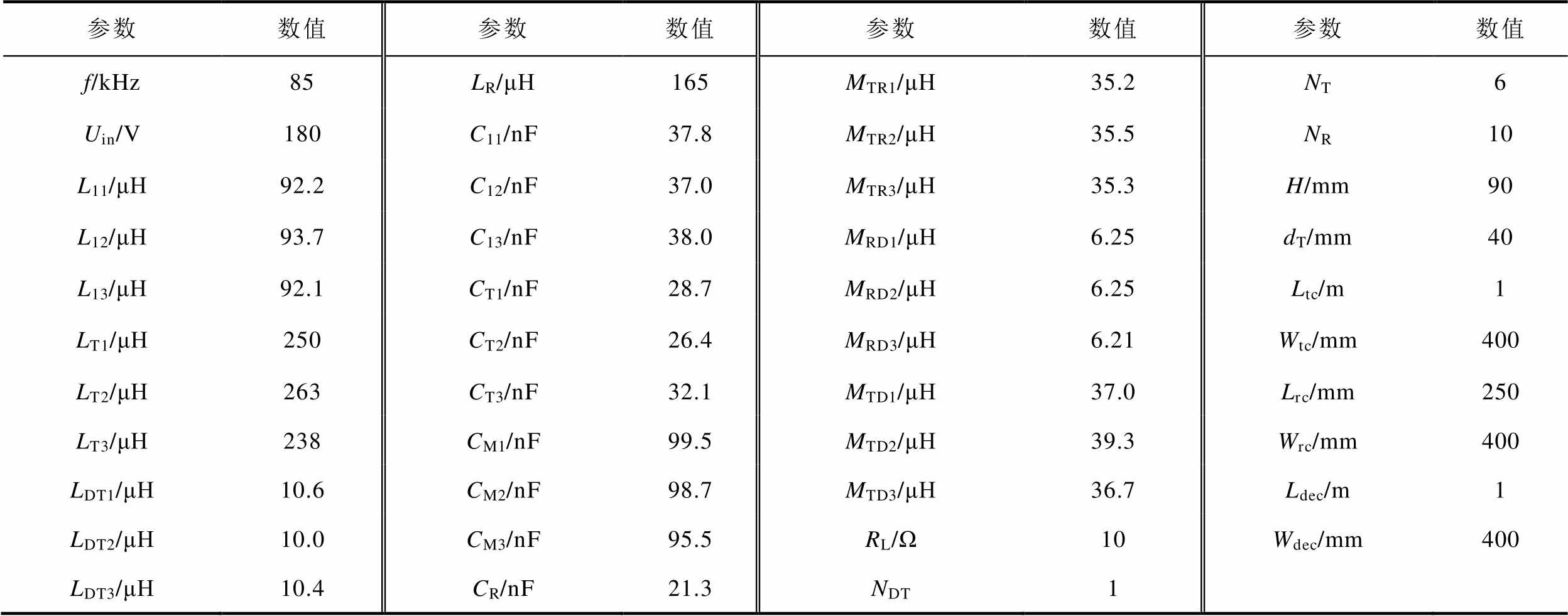
参数数值参数数值参数数值参数数值 f/kHz85LR/μH165MTR1/μH35.2NT6 Uin/V180C11/nF37.8MTR2/μH35.5NR10 L11/μH92.2C12/nF37.0MTR3/μH35.3H/mm90 L12/μH93.7C13/nF38.0MRD1/μH6.25dT/mm40 L13/μH92.1CT1/nF28.7MRD2/μH6.25Ltc/m1 LT1/μH250CT2/nF26.4MRD3/μH6.21Wtc/mm400 LT2/μH263CT3/nF32.1MTD1/μH37.0Lrc/mm250 LT3/μH238CM1/nF99.5MTD2/μH39.3Wrc/mm400 LDT1/μH10.6CM2/nF98.7MTD3/μH36.7Ldec/m1 LDT2/μH10.0CM3/nF95.5RL/Ω10Wdec/mm400 LDT3/μH10.4CR/nF21.3NDT1
当接收线圈R1位于发射线圈正上方时,系统效率η和输出电压UL分别为90.4%和72 V,样机功率等级为500 W。AGV的速度一般为1~3 m/s[20],实验中样机的速度为1.25 m/s左右。
检测线圈DT1和DT2的输出动态电压波形UC1和UC2如图10所示。UC1和UC2的交点电压为14.5 V,大于DC-DC模块阈值电压(6.5 V),并且结合İin1和İin2的波形可以发现,检测线圈DT2在DT1休眠前就被激活,与提出的分段切换策略一致。
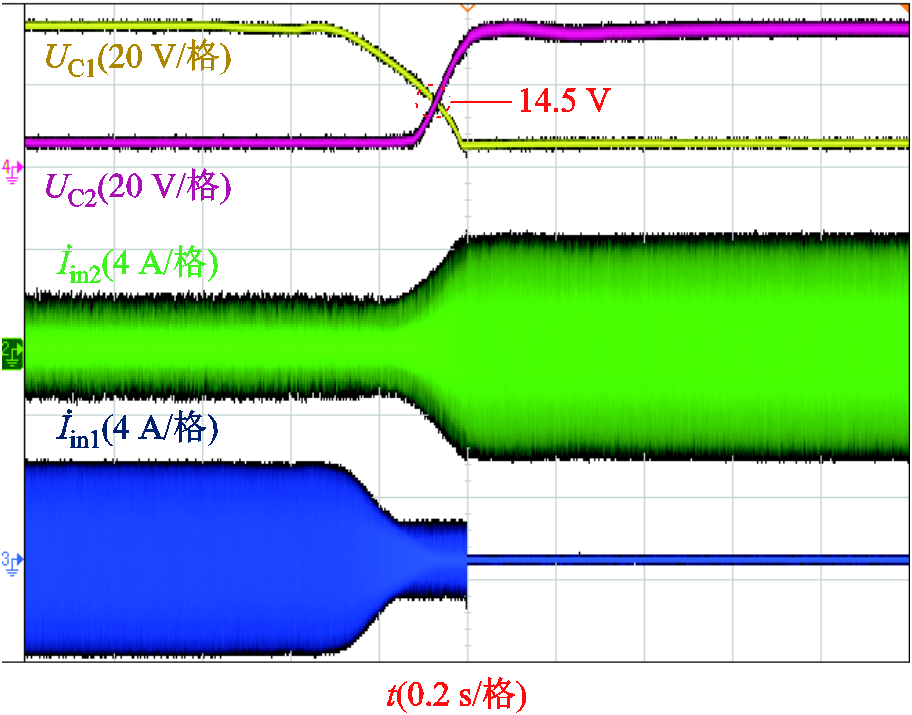
图10 UC1和UC2的动态波形
Fig.10 The dynamic waveforms of UC1 and UC2
输出电压、电流波形如图11所示,UL和IL分别为负载电压、电流, 为开关S1两端的端电压,İin1为发射线圈T1补偿网络的输入电流。可以发现在图11a中开关S1关断时并不会出现开关过电压,这是因为输入电流İin1在开关S1关断前就处于空载状态,此时R1和T1之间的互感MTR1几乎为零。
为开关S1两端的端电压,İin1为发射线圈T1补偿网络的输入电流。可以发现在图11a中开关S1关断时并不会出现开关过电压,这是因为输入电流İin1在开关S1关断前就处于空载状态,此时R1和T1之间的互感MTR1几乎为零。
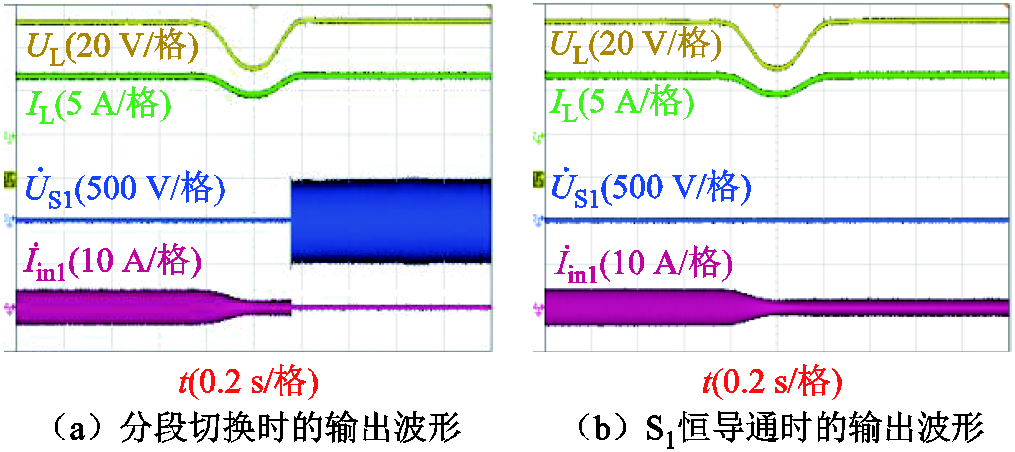
图11 输出电压、电流动态波形
Fig.11 The dynamic waveforms of output voltage/current
通过比较图11a和图11b可以发现,当开关S1关断执行分段操作和开关S1恒导通不执行分段切换时,接收线圈过分段的输出电压、电流波形是一致的,表明分段切换操作并不会影响系统原本的输出特性。过分段时输出电压UL和电流IL的波动是接收线圈在过分段时由MTR1和MTR2的波动产生的,此波动可通过车载端DC-DC模块进行抑制[21]。
实验过程中发射线圈电流的动态波形如图12所示,可以发现,在接收线圈R1从发射线圈T1上方运动到发射线圈T2上方时,系统存在三种状态:接收线圈运动到T1上方,发射线圈T1和T2开通,此时系统处于状态1;接收线圈运动到T1和T2的过分段区间后半段,发射线圈T1、T2和T3开通,此时系统处于状态2;接收线圈运动到T2上方,发射线圈T2和T3开通,此时系统处于状态3。这三种状态与2.2节分段切换策略中讨论的三种状态一致。

图12 发射线圈动态电流波形
Fig.12 The dynamic waveforms of Tx coil current
本文提出了一种用于AGV动态无线供电系统的无通信位置检测和自动分段切换技术。分析了系统结构和电路,得到检测线圈输出电压的数学模型;对位置检测系统原理进行了分析,提出对应的发射线圈分段切换策略。具体如下:
1)提出了一种无需通信和传感器的接收线圈位置检测方法,只需发射端一个检测线圈便能构成位置检测系统,结构简单,接收端无需额外器件。
2)提出了一种发射线圈分段切换策略,利用检测线圈中的感应电压直接驱动分段切换开关,随着发射线圈的移动,对应的发射线圈按照分段切换策略自动开通,无需分段切换控制器和辅助电源,满足了AGV对DWPT系统位置检测与分段切换的要求。
3)搭建了500 W功率等级的DWPT实验原理样机。实验中,当接收线圈运动时,发射线圈能够按照分段切换策略以正确的次序进行无控制器自动切换,不会产生开关过电压;在发射线圈进行分段切换时,输出电压的稳定性并不会受到影响。实验结果表明本文所提出的接收线圈位置检测和发射线圈分段切换技术是可行的。
参考文献
[1] 陈凯楠, 蒋烨, 檀添, 等. 轨道交通350 kW大功率无线电能传输系统研究[J]. 电工技术学报, 2022, 37(10): 2411-2421, 2445.
Chen Kainan, Jiang Ye, Tan Tian, et al. Research on 350 kW high power wireless power transfer system for rail transit[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2411-2421, 2445.
[2] 崔淑梅, 宋贝贝, 王志远. 电动汽车动态无线供电磁耦合机构研究综述[J]. 电工技术学报, 2022, 37(3): 537-554.
Cui Shumei, Song Beibei, Wang Zhiyuan. Overview of magnetic coupler for electric vehicles dynamic wireless charging[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 537-554.
[3] Li Siqi, Mi C C. Wireless power transfer for electric vehicle applications[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(1): 4-17.
[4] 周玮, 蓝嘉豪, 麦瑞坤, 等. 无线充电电动汽车V2G模式下光储直流微电网能量管理策略[J]. 电工技术学报, 2022, 37(1): 82-91.
Zhou Wei, Lan Jiahao, Mai Ruikun, et al. Research on power management strategy of DC microgrid with photovoltaic, energy storage and EV-wireless power transfer in V2G mode[J]. Transactions of China Electrotechnical Society, 2022, 37(1): 82-91.
[5] 赵靖英, 张振远, 张珂. 基于H∞非线性控制器的电动汽车无线充电系统的副边控制设计与参数优化[J]. 电工技术学报, 2022, 37(3): 566-577.
Zhao Jingying, Zhang Zhenyuan, Zhang Ke. Control design and parameter optimization on secondary side of electric vehicle wireless charging system based on H∞ nonlinear controller[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 566-577.
[6] Choi S Y, Gu B W, Jeong S Y, et al. Advances in wireless power transfer systems for roadway-powered electric vehicles[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(1): 18-36.
[7] 刘健辰, 张淏源, 刘傲阳, 等. 动态无线充电下电气化交通网-配电网运行机理与协同优化[J]. 电力系统自动化, 2022, 46(12): 107-118.
Liu Jianchen, Zhang Haoyuan, Liu Aoyang, et al. Operation mechanism and co-optimization for electrified transportation-distribution networks with dynamic wireless charging[J]. Automation of Electric Power Systems, 2022, 46(12): 107-118.
[8] Cai Changsong, Saeedifard M, Wang Junhua, et al. A cost-effective segmented dynamic wireless charging system with stable efficiency and output power[J]. IEEE Transactions on Power Electronics, 2022, 37(7): 8682-8700.
[9] Ahmad A, Alam M S, Chabaan R. A comprehensive review of wireless charging technologies for electric vehicles[J]. IEEE Transactions on Transportation Electrification, 2018, 4(1): 38-63.
[10] Hasan N, Wang Hongjie, Saha T, et al. A novel position sensorless power transfer control of lumped coil-based in-motion wireless power transfer systems [C]//2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 2015: 586-593.
[11] Afonso J L, Martinez M C, Lisboa Cardoso L A, et al. RFID-triggered power activation for smart dynamic inductive wireless power transfer[C]//IECON 2017 - 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 2017: 6967-6973.
[12] Li Shufan, Wang Lifang, Guo Yanjie, et al. Flexible energy-transfer control of dynamic wireless power transfer system based on estimation of load and mutual inductance[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 1157-1167.
[13] Li Xiaofei, Hu Jiefeng, Wang Heshou, et al. A new coupling structure and position detection method for segmented control dynamic wireless power transfer systems[J]. IEEE Transactions on Power Electronics, 2020, 35(7): 6741-6745.
[14] Al Mahmud S A, Panhwar I, Jayathurathnage P. Large-area free-positioning wireless power transfer to movable receivers[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 12807-12816.
[15] Nagendra G R, Chen Liang, Covic G A, et al. Detection of EVs on IPT highways[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(3): 584-597.
[16] Azad A N, Echols A, Kulyukin V A, et al. Analysis, optimization, and demonstration of a vehicular detection system intended for dynamic wireless charging applications[J]. IEEE Transactions on Transportation Electrification, 2019, 5(1): 147-161.
[17] Patil D, Miller J M, Fahimi B, et al. A coil detection system for dynamic wireless charging of electric vehicle[J]. IEEE Transactions on Transportation Electrification, 2019, 5(4): 988-1003.
[18] Mai Ruikun, Luo Ying, Yang Bin, et al. Decoupling circuit for automated guided vehicles IPT charging systems with dual receivers[J]. IEEE Transactions on Power Electronics, 2020, 35(7): 6652-6657.
[19] 谢诗云, 杨奕, 李恋, 等. 基于双极性耦合磁场调控的高抗偏移偏转无线电能传输系统[J]. 电工技术学报, 2023, 38(18): 4838-4852.
Xie Shiyun, Yang Yi, Li Lian, et al. Wireless power transfer system with high misalignment tolerance based on bipolar coupling magnetic-field control[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 4838-4852.
[20] 刘野然. 动态无线供电系统效率提升的控制与优化方法[D]. 成都: 西南交通大学, 2020.
Liu Yeran. Control and optimization methods of dynamic wireless power transfer system for efficiency improvment[D]. Chengdu: Southwest Jiaotong University, 2020.
[21] Zhang Baichuan, Dong Shuai, Zhu Chunbo, et al. Composite control to suppress output fluctuation for receiver side of dynamic wireless power transfer system[J]. IEEE Transactions on Power Electronics, 2023, 38(5): 6720-6733.
Research on Automatic Segment Switching without Communication in Automated Guided Vehicle Dynamic Wireless Power Transfer System
Abstract Automated guided vehicles (AGVs) are widely used in logistics warehouses, ports and other occasions. However, the problems of short AGV range, fixed charging position and long charging time always restrict the improvement of logistics efficiency. Dynamic wireless power transfer (DWPT) can realize contactless and uninterrupted power supply for AGVs on the move, which not only extends their driving range, but also reduces the volume and weight of their batteries. The DWPT technology is a feasible solution to improve the operational efficiency of AGVs. In the process of designing AGV dynamic wireless power supply system, its compact interior space is an important consideration in the design process, therefore, AGV needs a simple structure, small size, low cost DWPT system.
As per the length of the Tx coils, the long-track type and the segmented type of DWPT system are classified. The segmented type DWPT system can improve system efficiency by segment control, which only allows the Tx coils under the Rx coil to be activated. Segment control highly relies on the proper functioning of position detection. The position detection method can be roughly categorized into three kinds: communication-based method, parameter estimation-based method, and detection-coil-based method. For the communication-based method, the global positioning system, Radio Frequency, and other method can be used. But it is not suitable for small size and compact interior AGVs. For the parameter-based method, the change of Tx side parameters is used for position detection. However, it usually requires Tx coils to be interval energized to detect the Receiver (Rx) coil, increasing the system standby loss. For the detection-coil-based method, additional inverters and hardware setup on the Rx side are needed to energize the detection coil, leading to complex deployment.
However, the existing position detection methods need to set up communication module, or complex circuit and other hardware. And all need the controller to process the position signal for segment switching. To simplify the implementation complexity of segment switching, a position detection method and a segment switching strategy are proposed. The position detection is realized with only one detection coil at the Tx side, which can enable the switches without any additional power supply. As the detection coil and the Tx coil are decoupled by an additional capacitor, the detection coil is only coupled with the Receiver (Rx) coil. Therefore, the detection coil is only energized by the Rx coil. As the Rx coil moves in/out, detection coils along the moving direction are activated/deactivated to enable/disenabled switches to turn corresponding Tx coils on/offautomatically without any control modules or communication, whichis suitable for smallsize AGVs.
The Tx array is comprised of n identical Tx coils (Tn), which transfer power to the receiver coil (R1). The Tx coils are wound around by n identical detection coils, resulting in a strong coupling between the detection coil and the Tx coil. To prevent the detection coil from being energized and triggered by the Tx coil, a circuit-based decoupling method is employed, which use a capacitor to cancel out the mutual inductance between Txcoil and detection coil.
The DWPT experimental principle prototype of 500 W power level was built. The experimental results verify the two functions of Rx coil position detection and Tx coil segment switching of the proposed system. In the experiment, when the Rx coil moves, the Tx coil can switch in the correct order automatically according to the segment switching strategy, and there is no switching overvoltage. The stability of the output voltage is not affected when the Tx coil is switched in segments. The proposed method of non-communication position detection and automatic segment switching is feasible.
keywords:Automated guided vehicle (AGV), dynamic wireless power transfer (DWPT), position detection, segment switching
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.231097
国家自然科学基金面上项目(51977184)和国家自然科学基金联合基金项目(U22A20222)资助。
收稿日期 2023-07-11
改稿日期 2023-10-21
荆 锐 男,1999年生,硕士研究生,研究方向为无线电能传输技术及其应用。
E-mail:jingrui@my.swjtu.edu.cn
麦瑞坤 男,1980年生,教授,博士生导师,研究方向为无线电能传输技术在轨道交通中的应用。
E-mail:mairk@swjtu.edu.cn(通信作者)
(编辑 郭丽军)